
歩行評価装置
【課題】対象者に装着された加速度センサを用いて、対象者の歩行状態を精度良く判定する。
【解決手段】加速度計測部は、対象者の足部の加速度を計測して加速度信号を出力する。周波数解析部は、前記加速度信号の周波数スペクトル分布を求める。ピーク検出部は、前記周波数スペクトル分布から、最大のパワー値を持つ第1ピーク周波数及び2番目に大きいパワー値を持つ第2ピーク周波数を検出する。健常歩行判定部は、前記第1ピーク周波数と前記第2ピーク周波数との関係に基づいて、健常歩行か着地が不適切な異常歩行かを判定する。
【解決手段】加速度計測部は、対象者の足部の加速度を計測して加速度信号を出力する。周波数解析部は、前記加速度信号の周波数スペクトル分布を求める。ピーク検出部は、前記周波数スペクトル分布から、最大のパワー値を持つ第1ピーク周波数及び2番目に大きいパワー値を持つ第2ピーク周波数を検出する。健常歩行判定部は、前記第1ピーク周波数と前記第2ピーク周波数との関係に基づいて、健常歩行か着地が不適切な異常歩行かを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、対象者に装着された加速度センサを用いて歩行評価を行う装置に関するものである。
【背景技術】
【0002】
様々なセンサデバイスを用いて、対象者の歩行の逸脱(異常)運動を判定する装置が、転倒予防等を目的とした歩容改善のため開発されている。
【0003】
その1つとして、対象者自身の身体(腰部側面)に水平軸まわりの回転角速度を体動信号として検出するセンサを配置し、その周波数成分からすり足現象を判定する手段を備えた、歩行検出装置が提案されている。
【0004】
しかしながら、この歩行検出装置は、腰部・大腿部付近の前後運動(もしくは上下運動)に基づいてのみ、すり足歩行を判定しているため、大腿部自体は振れていてもその他関節の麻痺や疲労によって生ずる、足先の着地方法の異常といった逸脱運動を容易に判定することができない、といった問題点があった。
【0005】
着地方法の異常は、支持が足底の異常位置に集中し、ふらつき更には転倒・捻挫といった現象の要因ともなる。歩容改善のためには本運動は検知が必須であるにもかかわらず、前述の問題点により見逃される事態が生じる。
【0006】
また、床の加速度・振動および撓みを検出するセンサを用いて、健常歩行・足の引きずり(limp)・すり足(shuffle)・転倒を判定する装置も提案されている。しかし、この装置はセンサを予め床に設置する必要があるため、場所に依らずに対象者の歩行を計測・判定することは難しい。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−6608号公報
【特許文献2】特表2006−525073号公報(国際公開第2004/092744号、米国特許第7857771号明細書)
【発明の概要】
【発明が解決しようとする課題】
【0008】
発明が解決しようとする課題は、対象者に装着された加速度センサを用いて、対象者の歩行状態を精度良く判定することである。
【課題を解決するための手段】
【0009】
上記課題を解決するために、実施形態の歩行評価装置は、加速度計測部、周波数解析部、ピーク検出部及び健常歩行判定部を備える。前記加速度計測部は、対象者の足部の加速度を計測して加速度信号を出力する。前記周波数解析部は、前記加速度信号の周波数スペクトル分布を求める。前記ピーク検出部は、前記周波数スペクトル分布から、最大のパワー値を持つ第1ピーク周波数及び2番目に大きいパワー値を持つ第2ピーク周波数を検出する。前記健常歩行判定部は、前記第1ピーク周波数と前記第2ピーク周波数との関係に基づいて、健常歩行か着地が不適切な異常歩行かを判定する。
【図面の簡単な説明】
【0010】
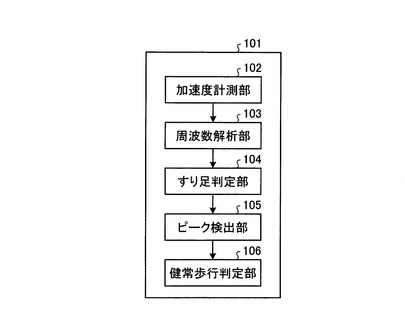
【図1】第1の実施形態の歩行評価装置のブロック図。
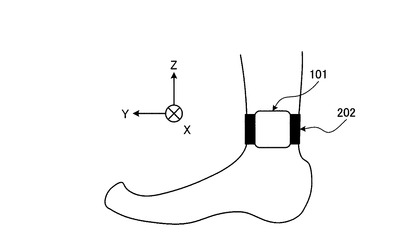
【図2】第1の実施形態の歩行評価装置の装着例。
【図3A】異常歩行の場合の周波数スペクトル分布の例。
【図3B】異常歩行の場合の周波数スペクトル分布の例。
【図3C】正常歩行の場合の周波数スペクトル分布の例。
【図3D】異常歩行の場合の周波数スペクトル分布の例。
【図3E】異常歩行の場合の周波数スペクトル分布の例。
【図3F】正常歩行の場合の周波数スペクトル分布の例。
【図4A】異常歩行の場合の加速度信号の例。
【図4B】正常歩行の場合の加速度信号の例。
【図4C】図4Aの場合の周波数スペクトル分布。
【図4D】図4Bの場合の周波数スペクトル分布。
【図5】正常歩行時の片脚の動きの矢状面図。
【図6】第1の実施形態の歩行評価装置のフローチャート。
【図7】第2の実施形態の歩行評価装置のブロック図。
【図8】第2の実施形態の歩行評価装置のフローチャート。
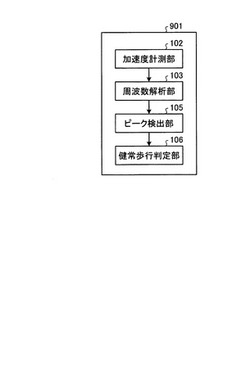
【図9】第3の実施形態の歩行評価装置のブロック図。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について説明する。なお、互いに同様の動作をする構成や処理には共通の符号を付して、重複する説明は省略する。
【0012】
(第1の実施形態)
図1は、本実施形態の歩行評価装置101のブロック図である。歩行評価装置101は、対象者の足部の加速度を計測する加速度計測部102と、加速度計測部102の出力信号の周波数解析を行って周波数スペクトル分布を求める周波数解析部103と、周波数解析部103から出力される周波数スペクトル分布に対する閾値処理により、異常歩行WA(すり足歩行)を判定するすり足判定部104と、周波数成分についての第1・第2ピークを取得するピーク検出部105と、第1・第2ピークの周波数の関係に基づき、対象者の歩行が異常歩行WB(大腿部は振られていても着地が不適切な異常歩行)であるか健常歩行WCであるかを判定する健常歩行判定部106と、を有する。
【0013】
加速度計測部102は加速度センサを有する。加速度計測部102は、加速度センサで対象者の足裏に対する鉛直方向(Z)の成分の加速度信号を計測する。本実施形態では3軸の加速度センサを用いるが、他の種類の加速度センサを用いても構わない。また、加速度計測測定範囲は±6G以上であることが好ましい。本実施形態では加速度センサは加速度計測部102に内蔵されているものとするが、加速度センサは有線または無線で加速度計測部102や歩行評価装置101の外部に接続されていても構わない。
【0014】
図2は、本実施形態の歩行評価装置101が対象者の足部に装着された状態の一例を示す模式図である。本実施形態の歩行評価装置101は、ベルト202により対象者の足首に装着される。なお、図2では側面に装着されているが、所定方向の加速度信号を計測可能であれば足首周辺の他の位置でも構わない。また、歩行評価装置101は、ベルト202の代わりに粘着部材で装着されても構わない。また、加速度センサが歩行評価装置101の外部に接続されている場合、加速度センサのみが粘着部材やベルト等で対象者の足に装着され、歩行評価装置101の本体は対象者の他の部分に装着されても構わない。
【0015】
また、加速度センサは必ずしも評価対象となる足に直接装着されていなくとも、靴等の外装部分に装着されても構わない。本実施形態ではZ方向の加速度信号を加速度計測部102で取得し、図1の構成で処理を進める手法の例を示すが、その他にもY方向の加速度信号および下腿部の角加速度信号も利用しても構わない。
【0016】
周波数解析部103は、加速度計測部102で計測されたZ方向の加速度信号を周波数解析して、時系列の加速度信号を周波数スペクトル分布に変換する。本実施形態の周波数解析部103は高速フーリエ変換(FFT)法を用いるが、他の周波数解析手法を用いても構わない。
【0017】
周波数解析部103は、数歩程度の長さに相当する時間区間の加速度信号に対して周波数解析を行う。本実施形態では、短い時間での歩行評価と精度良い歩行評価を可能とするために、5歩行周期程度の時間区間の加速度信号に対して周波数解析を行うものとする。ここで1歩行周期とは、踵が一度接地した時刻から次に踵が接地する時刻までの時間である。なお、周波数解析の時間区間の長さは上記の長さに限定されるものではない。
【0018】
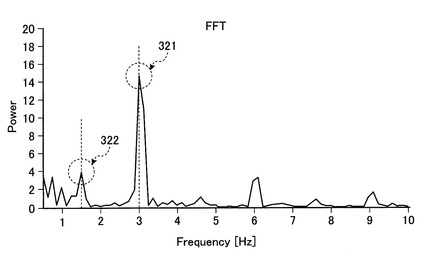
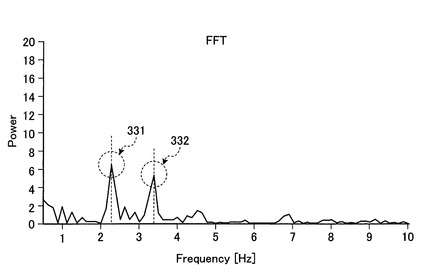
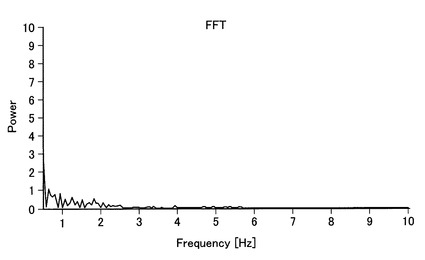
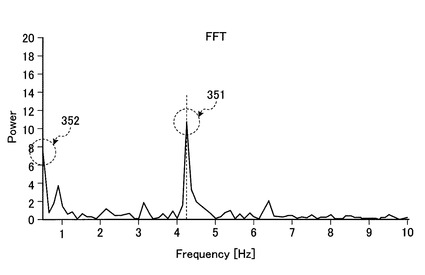
図3A〜図3Fは周波数解析部103が出力する周波数スペクトル分布であり、高齢者の異常歩行WA、異常歩行WB、健常歩行WCの各3状態における周波数特性の典型例を示す。図3A及び図3Dは理学療法士によって「すり足歩行」(異常歩行WA)と判定された対象者から得られたデータであり、図3B及び図3Eは「過度背屈や内反接地によるバランス不良」(異常歩行WB)と判定された対象者から得られたデータであり、図3C及び図3Fは「着地・足部挙上運動に関しては問題なし(健常歩行WC)」と判定された対象者から得られたデータである。「過度背屈や内反接地によるバランス不良」は、大腿部は振られていても着地が不適切な異常歩行の典型例である。
【0019】
異常歩行WB及び健常歩行WCの場合の周波数スペクトル分布と比較すると、異常歩行WAの場合の周波数スペクトル分布は全パワー値が低いという特徴を有する。異常歩行WAは「すり足」であり、足裏鉛直方向の加速度が殆ど発生しないためと考えられる。
【0020】
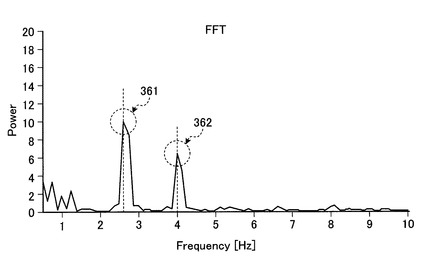
また、健常歩行WCの場合、2番目に大きいパワー値を持つピーク(第2ピーク332、362)の周波数は最大のパワー値を持つピーク(第1ピーク331、361)の周波数の1.5倍に相当し、第1ピークの周波数は歩行周波数の2倍に相当する。
【0021】
例えば図3Cの場合、第1ピーク331の周波数は2.25Hzであり、第2ピーク332の周波数は3.38Hzであり、歩行周波数は1.14Hzである。よって、第2ピーク332の周波数は第1ピーク331の周波数の1.50倍に相当し、第1ピーク331の周波数は歩行周波数の1.97倍に相当する。
【0022】
例えば図3Fの場合、第1ピーク361の周波数は2.63Hzであり、第2ピーク362の周波数は4.00Hzであり、歩行周波数は1.29Hzである。よって、第2ピーク362の周波数は第1ピーク361の周波数の1.52倍に相当し、第1ピーク361の周波数は歩行周波数の2.04倍に相当する。
【0023】
異常歩行WBの場合はこのような特徴を示さない。例えば図3Bの場合、第1ピーク321の周波数は3.00Hzであり、第2ピーク322の周波数は1.51Hzであり、歩行周波数は1.56Hzであるので、上述のような特徴を示さない。また、図3Eの場合も、第1ピーク351の周波数は4.24Hzであり、第2ピークの周波数は0.5Hzであり、歩行周波数は1.29Hzであるので、上述のような特徴を示さない。
【0024】
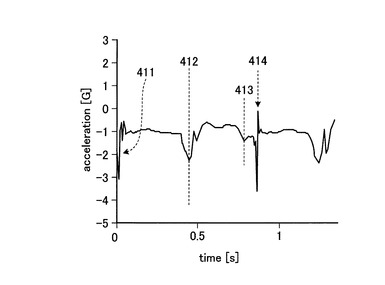
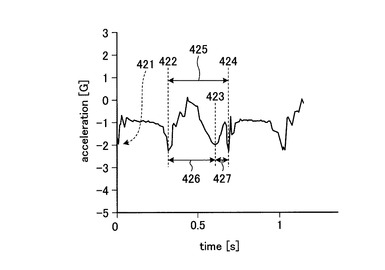
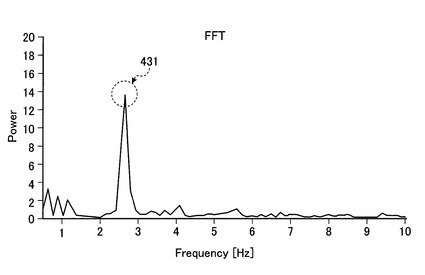
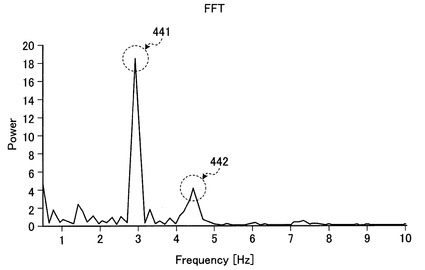
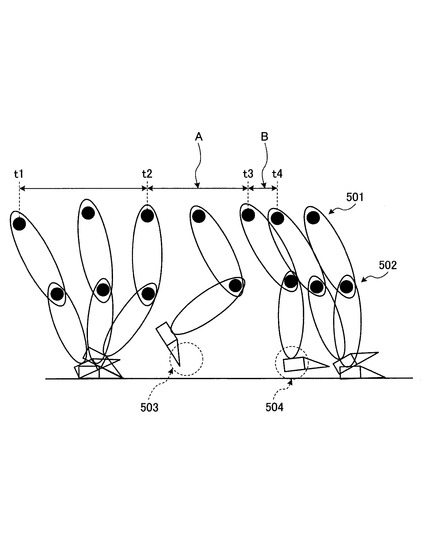
図4A〜図4D及び図5を用いて、異常歩行WB(背屈過度)と健常歩行WCのスペクトル分布の違いが生じる現象について説明する。図4Aは異常歩行WB(背屈過度)の対象者から得られた加速度信号であり、図4Cはその周波数スペクトル分布である。図4Bは健常歩行WCの対象者から得られた加速度信号であり、図4Dはその周波数スペクトル分布である。図5は健常歩行WCの場合の歩行態様を模式的に表した矢状面図であり、股関節501、膝502、つま先503、踵504の動きを示す。
【0025】
健常歩行WCの場合、時刻t1で踵が地面に着き、時刻t2で踵が地面から離れ、時刻t4で踵が再び地面に着く。時刻t2から時刻t3までの期間Aに、大腿部の運動によって足先は前方に大きく移動する(大腿振り出し期間)。そして、時刻t3から時刻t4までの期間Bに、主に膝関節の回転によって踵が前方に振り出される(踵振り出し期間)。この踵振り出し期間があるため、時刻t4で踵が地面に着く直前に足先の足裏鉛直下方向の加速度が減少する。
【0026】
図4Bにもこのような加速度信号の時間変化が現れている。図4Bの各時刻を図5の各時刻に対応付ける。図4Bの時刻421(t=0)は図5の時刻t1に対応し、時刻422は時刻t2に対応し、時刻423は時刻t3に対応し、時刻424は時刻t4に対応する。また、時間区間426は期間Aに対応し、時間区間427は期間Bに対応する。
【0027】
健常歩行WCの場合、踵が地面を離れてから踵が地面に着くまでの間に2種類の周期の加速度の波が発生する。その結果、図4Dに示すように周波数スペクトル分布に特徴的な二つのピーク441、442が現れる。ピーク441は踵が地面から離れてから再び地面に着くまでの期間に対応する周波数であり、ピーク442は大腿振り出し期間に対応する周波数である。
【0028】
図4Aの各時刻を図5の各時刻に対応付ける。図4Aの時刻411(t=0)は図5の時刻t1に対応し、時刻412は時刻t2に対応し、時刻413は時刻t3に対応し、時刻424は時刻t4に対応すると推定される。異常歩行WBの場合、図4Aの時刻413近傍での加速度の変動が小さいため、図4Cに示すように周波数スペクトル分布には踵が離れてから再び地面に着くまでの期間に対応する周波数にピーク431が現れる。
【0029】
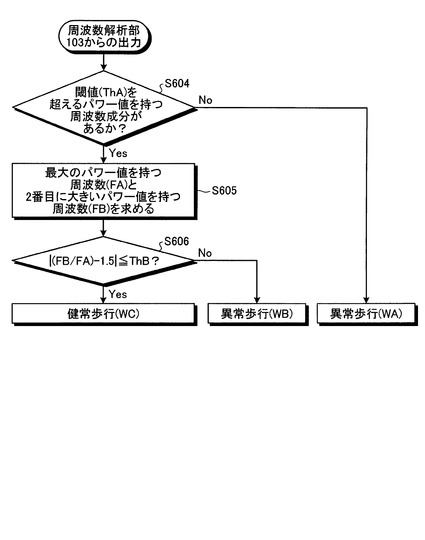
上述の周波数特徴に基づいて、すり足判定部104、ピーク検出部105及び健常歩行判定部106が、3種類の歩行状態(異常歩行WA、異常歩行WB、健常歩行WC)を判別する処理のフローチャートを図6に示す。
【0030】
すり足判定部104は、周波数解析部3から出力された周波数スペクトル分布に閾値ThAを越えるパワー値を持つ周波数成分が存在するかを判定する(ステップS604)。閾値ThAを越えるパワー値を持つ周波数成分が存在しない、すなわち全パワー値が閾値ThA以下である場合には(ステップS604:No)、すり足判定部104は評価対象の歩行を異常歩行WA(すり足)と判定する。すり足判定部104の処理量を削減するために、ステップS604で判定の対象とする周波数帯域を、主に対象脚自体の関節運動に起因する波形が観察される周波数帯域に制限しても構わない。例えば0.5Hz以上10Hz未満の周波数帯域に制限しても構わない。
【0031】
すり足判定部104で異常歩行WA(すり足)と判定されなかった場合、すなわち閾値ThAを越えるパワー値を持つ周波数成分が存在する場合には(ステップS604:Yes)、ピーク検出部105は、周波数解析部3から出力された周波数スペクトル分布で最大のパワー値を持つ第1ピーク周波数FAと第二に大きいパワー値を持つ第2ピーク周波数FBを求める(ステップS605)。ピーク検出部105の処理を削減するために、第1ピーク周波数FA及び第1ピーク周波数FBを求める範囲を、主に対象脚自体の関節運動に起因する波形が観察される周波数帯域に制限しても構わない。例えば0.5Hz以上10Hz未満の周波数帯域に限定しても構わない。
【0032】
健常歩行判定部106は、第1ピーク周波数FAに対する第2ピーク周波数FBの比(FB/FA)が所定の範囲内(約1.5)であるかどうかを判定する(ステップS606)。所定の範囲内の値である場合には(ステップS606:Yes)健常歩行WCと判定し、所定の範囲外の値である場合には(ステップS606:No)異常歩行WBと判定する。健常歩行判定部106は、例えば比(FB/FA)が1.5±ThBの範囲内であれば健常歩行と判定する。本実施形態では、ThBとして0.25を用いる。すなわち、比(FB/FA)が1.25〜1.75の範囲内であれば健常歩行と判定する。なお、上述の範囲は本実施形態の歩行評価装置の使用目的等に応じて値を適宜調整し得る。上述の範囲は1.25〜1.75の間で1.5を含む任意の範囲に設定しても構わない。
【0033】
なお、健常歩行判定部106は上述の範囲の比を持つ第1、第2ピーク周波数が与えられた場合に健常歩行WCと判定する特性を有していればよく、必ずしも実際に比(FB/FA)を計算しない構成であっても構わない。
【0034】
本実施形態の歩行評価装置101を用いて歩行評価の試験を行った。この試験では、閾値ThAは3、閾値ThBは0.1に設定された。18名の高齢者を対象に試験が行われた。各被験者は4回ずつ歩行し、合計で72回の歩行評価結果を得た。
【0035】
各被験者は予め理学療法士によって異常歩行WA、異常歩行WB及び健常歩行WCのいずれに該当するか判定されている。その内訳は、異常歩行WAの群は5名、異常歩行WBの群は4名、そして、健常歩行WCの群は9名であった。よって、異常歩行WAと評価されるべき歩行は20回であり、異常歩行WBと評価されるべき歩行は16回であり、健常歩行WCと評価されるべき歩行は36回である。
【0036】
本実施形態の歩行評価装置101は21回の歩行を異常歩行WAと評価し、そのうち20回の歩行は理学療法士の判定と一致した。よって、異常歩行WAに関して、再現率は20/20=1.00で、適合率は20/21=0.95であり、F値は0.97である。
【0037】
本実施形態の歩行評価装置101は19回の歩行を異常歩行WBと評価し、そのうち14回の歩行は理学療法士の判定と一致した。よって、異常歩行WBに関して、再現率は14/16=0.88で、適合率は14/19=0.74であり、F値は0.80である。
【0038】
本実施形態の歩行評価装置101は32回の歩行を健常歩行WCと評価し、そのうち30回の歩行は理学療法士の判定と一致した。よって、健常歩行WCに関して、再現率は30/36=0.83で、適合率は30/32=0.94であり、F値は0.88である。
【0039】
この試験において、本実施形態の歩行評価装置101は、F値が80%以上という成績を収めた。
【0040】
以上に説明したように、本実施形態の歩行評価装置101は、一つのセンサから得られる特徴を用いて、計測環境にかかわらず、(1)躓きの原因となり得る異常歩行WA(すり足)、(2)ふらつきの原因となりうる異常歩行WB(着地方法の異常)、および(3)健常歩行WCの、3つの状態を精度良く判定することができる。
【0041】
(第2の実施形態)
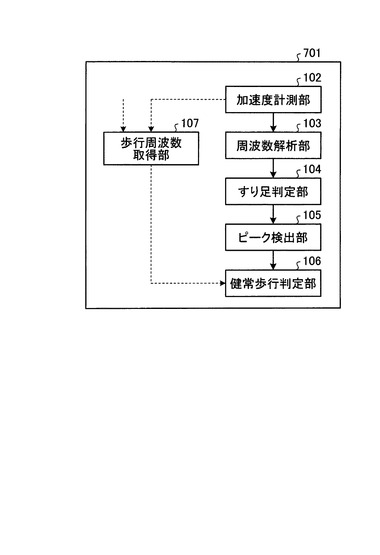
図7は本実施形態の歩行評価装置701のブロック図である。第1の実施形態の歩行評価装置101と共通する部分の説明は可能な範囲で省略し、異なる点を説明する。
【0042】
歩行評価装置701は歩行周波数取得部107を有する。歩行周波数取得部107は加速度計測部102からの加速度データに基づいて歩行周波数FCを求める。歩行周波数FCは、踵が着地してから(図5の時刻t1)次に踵が着地するまで(図5の時刻t4)の時間の逆数に相当する。
【0043】
踵が着地する瞬間、Z方向の加速度信号には高周波のノイズが加わる。歩行周波数取得部107は加速度計測部102からの出力信号をハイパスフィルタで処理して得られる信号から、閾値を越える振幅の波が検知された場合に踵が着地したと判定する。なお、歩行周波数取得部107は、加速度計測部102からの他の方向の加速度信号や他のセンサ(例えば万歩計(登録商標))からの出力信号に基づいて歩行周波数を求める構成であっても構わないし、手動で歩行周期のデータを入力する構成でも構わない。
【0044】
健常歩行判定部106は、第1ピーク周波数FA、第2ピーク周波数FB及び歩行周波数FCに基づいて、対象者の歩行が異常歩行WBか健常歩行WCかを判定する。比(FB/FA)が1.5±ThBの範囲内であり、かつ、比(FA/FC)が2.0±ThCの範囲内である場合に、健常歩行判定部106は健常歩行WCと判定する。本実施形態ではThC=0.25を用いる。なお、比(FA/FC)についての範囲は1.75〜2.25の間で2.0を含む任意の範囲に設定されても構わない。
【0045】
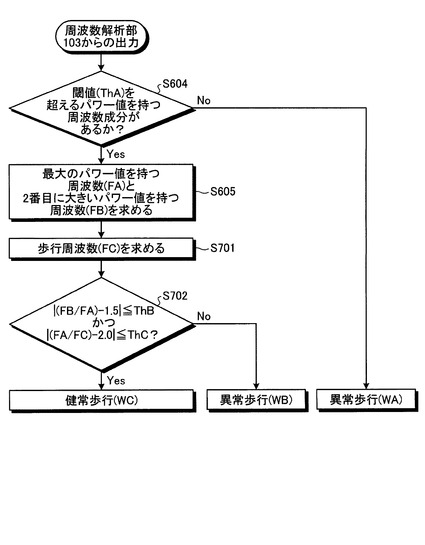
本実施形態の歩行状態を判別する処理のフローチャートを図8に示す。以下、図6と異なる点を説明する。まず、歩行周波数取得部107が、歩行周波数FCを求める(ステップS701)。そして、健常歩行判定部106は、比(FB/FA)が1.5±ThBの範囲内であり、かつ、比(FA/FC)が2.0±ThCの範囲内であるかどうかを判定し(ステップS702)、2つの条件の双方を満たす場合に(ステップS702:Yes)、健常歩行判定部106は健常歩行WCと判定する。2つの条件のいずれか一方でも満たさない場合(ステップS702:No)、健常歩行判定部106は異常歩行WBと判定する。
【0046】
本実施形態によれば、健常歩行WCの判定精度をさらに向上させることができる。
【0047】
(第3の実施形態)
図9は本実施形態の歩行評価装置901のブロック図である。歩行評価装置901は、第1の実施形態の歩行評価装置101からすり足判定部104を省いた構成である。
【0048】
例えばすり足で歩行しないことが明らかな対象者の歩行評価を行う場合、歩行評価装置901の構成で十分である。
【0049】
異常歩行WA(すり足)の場合、ピーク周波数は上述した特徴を示さない。歩行評価装置901は異常歩行WAと異常歩行WBの区別を行わず、異常歩行WA・WBか、健常歩行WCかの2つの状態の判定を行う目的で使用する場合も、歩行評価装置901の構成で十分である。
【0050】
なお、第2の実施形態で説明した歩行周波数取得部107を備える構成であっても構わない。
【0051】
本実施形態によれば、第1の実施形態や第2の実施形態に比べて、歩行評価装置を安価に提供できる。
【0052】
上述した各実施形態で登場した、加速度計測部102、周波数解析部103、すり足判定部104、ピーク検出部105、健常歩行判定部106及び歩行周波数取得部107は、半導体集積回路で実現されても構わないし、1又は複数のプロセッサでプログラムを動作させることにより実現されても構わないし、これらの組み合わせで実現されることもできる。また、加速度計測部102の加速度センサ部分については、半導体式や機械式など、種々の公知なものを用いることができる。
【0053】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0054】
101,701,901 歩行評価装置
102 加速度計測部
103 周波数解析部
107 歩行周波数取得部
104 すり足判定部
105 ピーク検出部
106 健常歩行判定部
202 ベルト
501 股関節
502 膝
503 つま先
504 踵
【技術分野】
【0001】
本発明の実施形態は、対象者に装着された加速度センサを用いて歩行評価を行う装置に関するものである。
【背景技術】
【0002】
様々なセンサデバイスを用いて、対象者の歩行の逸脱(異常)運動を判定する装置が、転倒予防等を目的とした歩容改善のため開発されている。
【0003】
その1つとして、対象者自身の身体(腰部側面)に水平軸まわりの回転角速度を体動信号として検出するセンサを配置し、その周波数成分からすり足現象を判定する手段を備えた、歩行検出装置が提案されている。
【0004】
しかしながら、この歩行検出装置は、腰部・大腿部付近の前後運動(もしくは上下運動)に基づいてのみ、すり足歩行を判定しているため、大腿部自体は振れていてもその他関節の麻痺や疲労によって生ずる、足先の着地方法の異常といった逸脱運動を容易に判定することができない、といった問題点があった。
【0005】
着地方法の異常は、支持が足底の異常位置に集中し、ふらつき更には転倒・捻挫といった現象の要因ともなる。歩容改善のためには本運動は検知が必須であるにもかかわらず、前述の問題点により見逃される事態が生じる。
【0006】
また、床の加速度・振動および撓みを検出するセンサを用いて、健常歩行・足の引きずり(limp)・すり足(shuffle)・転倒を判定する装置も提案されている。しかし、この装置はセンサを予め床に設置する必要があるため、場所に依らずに対象者の歩行を計測・判定することは難しい。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−6608号公報
【特許文献2】特表2006−525073号公報(国際公開第2004/092744号、米国特許第7857771号明細書)
【発明の概要】
【発明が解決しようとする課題】
【0008】
発明が解決しようとする課題は、対象者に装着された加速度センサを用いて、対象者の歩行状態を精度良く判定することである。
【課題を解決するための手段】
【0009】
上記課題を解決するために、実施形態の歩行評価装置は、加速度計測部、周波数解析部、ピーク検出部及び健常歩行判定部を備える。前記加速度計測部は、対象者の足部の加速度を計測して加速度信号を出力する。前記周波数解析部は、前記加速度信号の周波数スペクトル分布を求める。前記ピーク検出部は、前記周波数スペクトル分布から、最大のパワー値を持つ第1ピーク周波数及び2番目に大きいパワー値を持つ第2ピーク周波数を検出する。前記健常歩行判定部は、前記第1ピーク周波数と前記第2ピーク周波数との関係に基づいて、健常歩行か着地が不適切な異常歩行かを判定する。
【図面の簡単な説明】
【0010】
【図1】第1の実施形態の歩行評価装置のブロック図。
【図2】第1の実施形態の歩行評価装置の装着例。
【図3A】異常歩行の場合の周波数スペクトル分布の例。
【図3B】異常歩行の場合の周波数スペクトル分布の例。
【図3C】正常歩行の場合の周波数スペクトル分布の例。
【図3D】異常歩行の場合の周波数スペクトル分布の例。
【図3E】異常歩行の場合の周波数スペクトル分布の例。
【図3F】正常歩行の場合の周波数スペクトル分布の例。
【図4A】異常歩行の場合の加速度信号の例。
【図4B】正常歩行の場合の加速度信号の例。
【図4C】図4Aの場合の周波数スペクトル分布。
【図4D】図4Bの場合の周波数スペクトル分布。
【図5】正常歩行時の片脚の動きの矢状面図。
【図6】第1の実施形態の歩行評価装置のフローチャート。
【図7】第2の実施形態の歩行評価装置のブロック図。
【図8】第2の実施形態の歩行評価装置のフローチャート。
【図9】第3の実施形態の歩行評価装置のブロック図。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について説明する。なお、互いに同様の動作をする構成や処理には共通の符号を付して、重複する説明は省略する。
【0012】
(第1の実施形態)
図1は、本実施形態の歩行評価装置101のブロック図である。歩行評価装置101は、対象者の足部の加速度を計測する加速度計測部102と、加速度計測部102の出力信号の周波数解析を行って周波数スペクトル分布を求める周波数解析部103と、周波数解析部103から出力される周波数スペクトル分布に対する閾値処理により、異常歩行WA(すり足歩行)を判定するすり足判定部104と、周波数成分についての第1・第2ピークを取得するピーク検出部105と、第1・第2ピークの周波数の関係に基づき、対象者の歩行が異常歩行WB(大腿部は振られていても着地が不適切な異常歩行)であるか健常歩行WCであるかを判定する健常歩行判定部106と、を有する。
【0013】
加速度計測部102は加速度センサを有する。加速度計測部102は、加速度センサで対象者の足裏に対する鉛直方向(Z)の成分の加速度信号を計測する。本実施形態では3軸の加速度センサを用いるが、他の種類の加速度センサを用いても構わない。また、加速度計測測定範囲は±6G以上であることが好ましい。本実施形態では加速度センサは加速度計測部102に内蔵されているものとするが、加速度センサは有線または無線で加速度計測部102や歩行評価装置101の外部に接続されていても構わない。
【0014】
図2は、本実施形態の歩行評価装置101が対象者の足部に装着された状態の一例を示す模式図である。本実施形態の歩行評価装置101は、ベルト202により対象者の足首に装着される。なお、図2では側面に装着されているが、所定方向の加速度信号を計測可能であれば足首周辺の他の位置でも構わない。また、歩行評価装置101は、ベルト202の代わりに粘着部材で装着されても構わない。また、加速度センサが歩行評価装置101の外部に接続されている場合、加速度センサのみが粘着部材やベルト等で対象者の足に装着され、歩行評価装置101の本体は対象者の他の部分に装着されても構わない。
【0015】
また、加速度センサは必ずしも評価対象となる足に直接装着されていなくとも、靴等の外装部分に装着されても構わない。本実施形態ではZ方向の加速度信号を加速度計測部102で取得し、図1の構成で処理を進める手法の例を示すが、その他にもY方向の加速度信号および下腿部の角加速度信号も利用しても構わない。
【0016】
周波数解析部103は、加速度計測部102で計測されたZ方向の加速度信号を周波数解析して、時系列の加速度信号を周波数スペクトル分布に変換する。本実施形態の周波数解析部103は高速フーリエ変換(FFT)法を用いるが、他の周波数解析手法を用いても構わない。
【0017】
周波数解析部103は、数歩程度の長さに相当する時間区間の加速度信号に対して周波数解析を行う。本実施形態では、短い時間での歩行評価と精度良い歩行評価を可能とするために、5歩行周期程度の時間区間の加速度信号に対して周波数解析を行うものとする。ここで1歩行周期とは、踵が一度接地した時刻から次に踵が接地する時刻までの時間である。なお、周波数解析の時間区間の長さは上記の長さに限定されるものではない。
【0018】
図3A〜図3Fは周波数解析部103が出力する周波数スペクトル分布であり、高齢者の異常歩行WA、異常歩行WB、健常歩行WCの各3状態における周波数特性の典型例を示す。図3A及び図3Dは理学療法士によって「すり足歩行」(異常歩行WA)と判定された対象者から得られたデータであり、図3B及び図3Eは「過度背屈や内反接地によるバランス不良」(異常歩行WB)と判定された対象者から得られたデータであり、図3C及び図3Fは「着地・足部挙上運動に関しては問題なし(健常歩行WC)」と判定された対象者から得られたデータである。「過度背屈や内反接地によるバランス不良」は、大腿部は振られていても着地が不適切な異常歩行の典型例である。
【0019】
異常歩行WB及び健常歩行WCの場合の周波数スペクトル分布と比較すると、異常歩行WAの場合の周波数スペクトル分布は全パワー値が低いという特徴を有する。異常歩行WAは「すり足」であり、足裏鉛直方向の加速度が殆ど発生しないためと考えられる。
【0020】
また、健常歩行WCの場合、2番目に大きいパワー値を持つピーク(第2ピーク332、362)の周波数は最大のパワー値を持つピーク(第1ピーク331、361)の周波数の1.5倍に相当し、第1ピークの周波数は歩行周波数の2倍に相当する。
【0021】
例えば図3Cの場合、第1ピーク331の周波数は2.25Hzであり、第2ピーク332の周波数は3.38Hzであり、歩行周波数は1.14Hzである。よって、第2ピーク332の周波数は第1ピーク331の周波数の1.50倍に相当し、第1ピーク331の周波数は歩行周波数の1.97倍に相当する。
【0022】
例えば図3Fの場合、第1ピーク361の周波数は2.63Hzであり、第2ピーク362の周波数は4.00Hzであり、歩行周波数は1.29Hzである。よって、第2ピーク362の周波数は第1ピーク361の周波数の1.52倍に相当し、第1ピーク361の周波数は歩行周波数の2.04倍に相当する。
【0023】
異常歩行WBの場合はこのような特徴を示さない。例えば図3Bの場合、第1ピーク321の周波数は3.00Hzであり、第2ピーク322の周波数は1.51Hzであり、歩行周波数は1.56Hzであるので、上述のような特徴を示さない。また、図3Eの場合も、第1ピーク351の周波数は4.24Hzであり、第2ピークの周波数は0.5Hzであり、歩行周波数は1.29Hzであるので、上述のような特徴を示さない。
【0024】
図4A〜図4D及び図5を用いて、異常歩行WB(背屈過度)と健常歩行WCのスペクトル分布の違いが生じる現象について説明する。図4Aは異常歩行WB(背屈過度)の対象者から得られた加速度信号であり、図4Cはその周波数スペクトル分布である。図4Bは健常歩行WCの対象者から得られた加速度信号であり、図4Dはその周波数スペクトル分布である。図5は健常歩行WCの場合の歩行態様を模式的に表した矢状面図であり、股関節501、膝502、つま先503、踵504の動きを示す。
【0025】
健常歩行WCの場合、時刻t1で踵が地面に着き、時刻t2で踵が地面から離れ、時刻t4で踵が再び地面に着く。時刻t2から時刻t3までの期間Aに、大腿部の運動によって足先は前方に大きく移動する(大腿振り出し期間)。そして、時刻t3から時刻t4までの期間Bに、主に膝関節の回転によって踵が前方に振り出される(踵振り出し期間)。この踵振り出し期間があるため、時刻t4で踵が地面に着く直前に足先の足裏鉛直下方向の加速度が減少する。
【0026】
図4Bにもこのような加速度信号の時間変化が現れている。図4Bの各時刻を図5の各時刻に対応付ける。図4Bの時刻421(t=0)は図5の時刻t1に対応し、時刻422は時刻t2に対応し、時刻423は時刻t3に対応し、時刻424は時刻t4に対応する。また、時間区間426は期間Aに対応し、時間区間427は期間Bに対応する。
【0027】
健常歩行WCの場合、踵が地面を離れてから踵が地面に着くまでの間に2種類の周期の加速度の波が発生する。その結果、図4Dに示すように周波数スペクトル分布に特徴的な二つのピーク441、442が現れる。ピーク441は踵が地面から離れてから再び地面に着くまでの期間に対応する周波数であり、ピーク442は大腿振り出し期間に対応する周波数である。
【0028】
図4Aの各時刻を図5の各時刻に対応付ける。図4Aの時刻411(t=0)は図5の時刻t1に対応し、時刻412は時刻t2に対応し、時刻413は時刻t3に対応し、時刻424は時刻t4に対応すると推定される。異常歩行WBの場合、図4Aの時刻413近傍での加速度の変動が小さいため、図4Cに示すように周波数スペクトル分布には踵が離れてから再び地面に着くまでの期間に対応する周波数にピーク431が現れる。
【0029】
上述の周波数特徴に基づいて、すり足判定部104、ピーク検出部105及び健常歩行判定部106が、3種類の歩行状態(異常歩行WA、異常歩行WB、健常歩行WC)を判別する処理のフローチャートを図6に示す。
【0030】
すり足判定部104は、周波数解析部3から出力された周波数スペクトル分布に閾値ThAを越えるパワー値を持つ周波数成分が存在するかを判定する(ステップS604)。閾値ThAを越えるパワー値を持つ周波数成分が存在しない、すなわち全パワー値が閾値ThA以下である場合には(ステップS604:No)、すり足判定部104は評価対象の歩行を異常歩行WA(すり足)と判定する。すり足判定部104の処理量を削減するために、ステップS604で判定の対象とする周波数帯域を、主に対象脚自体の関節運動に起因する波形が観察される周波数帯域に制限しても構わない。例えば0.5Hz以上10Hz未満の周波数帯域に制限しても構わない。
【0031】
すり足判定部104で異常歩行WA(すり足)と判定されなかった場合、すなわち閾値ThAを越えるパワー値を持つ周波数成分が存在する場合には(ステップS604:Yes)、ピーク検出部105は、周波数解析部3から出力された周波数スペクトル分布で最大のパワー値を持つ第1ピーク周波数FAと第二に大きいパワー値を持つ第2ピーク周波数FBを求める(ステップS605)。ピーク検出部105の処理を削減するために、第1ピーク周波数FA及び第1ピーク周波数FBを求める範囲を、主に対象脚自体の関節運動に起因する波形が観察される周波数帯域に制限しても構わない。例えば0.5Hz以上10Hz未満の周波数帯域に限定しても構わない。
【0032】
健常歩行判定部106は、第1ピーク周波数FAに対する第2ピーク周波数FBの比(FB/FA)が所定の範囲内(約1.5)であるかどうかを判定する(ステップS606)。所定の範囲内の値である場合には(ステップS606:Yes)健常歩行WCと判定し、所定の範囲外の値である場合には(ステップS606:No)異常歩行WBと判定する。健常歩行判定部106は、例えば比(FB/FA)が1.5±ThBの範囲内であれば健常歩行と判定する。本実施形態では、ThBとして0.25を用いる。すなわち、比(FB/FA)が1.25〜1.75の範囲内であれば健常歩行と判定する。なお、上述の範囲は本実施形態の歩行評価装置の使用目的等に応じて値を適宜調整し得る。上述の範囲は1.25〜1.75の間で1.5を含む任意の範囲に設定しても構わない。
【0033】
なお、健常歩行判定部106は上述の範囲の比を持つ第1、第2ピーク周波数が与えられた場合に健常歩行WCと判定する特性を有していればよく、必ずしも実際に比(FB/FA)を計算しない構成であっても構わない。
【0034】
本実施形態の歩行評価装置101を用いて歩行評価の試験を行った。この試験では、閾値ThAは3、閾値ThBは0.1に設定された。18名の高齢者を対象に試験が行われた。各被験者は4回ずつ歩行し、合計で72回の歩行評価結果を得た。
【0035】
各被験者は予め理学療法士によって異常歩行WA、異常歩行WB及び健常歩行WCのいずれに該当するか判定されている。その内訳は、異常歩行WAの群は5名、異常歩行WBの群は4名、そして、健常歩行WCの群は9名であった。よって、異常歩行WAと評価されるべき歩行は20回であり、異常歩行WBと評価されるべき歩行は16回であり、健常歩行WCと評価されるべき歩行は36回である。
【0036】
本実施形態の歩行評価装置101は21回の歩行を異常歩行WAと評価し、そのうち20回の歩行は理学療法士の判定と一致した。よって、異常歩行WAに関して、再現率は20/20=1.00で、適合率は20/21=0.95であり、F値は0.97である。
【0037】
本実施形態の歩行評価装置101は19回の歩行を異常歩行WBと評価し、そのうち14回の歩行は理学療法士の判定と一致した。よって、異常歩行WBに関して、再現率は14/16=0.88で、適合率は14/19=0.74であり、F値は0.80である。
【0038】
本実施形態の歩行評価装置101は32回の歩行を健常歩行WCと評価し、そのうち30回の歩行は理学療法士の判定と一致した。よって、健常歩行WCに関して、再現率は30/36=0.83で、適合率は30/32=0.94であり、F値は0.88である。
【0039】
この試験において、本実施形態の歩行評価装置101は、F値が80%以上という成績を収めた。
【0040】
以上に説明したように、本実施形態の歩行評価装置101は、一つのセンサから得られる特徴を用いて、計測環境にかかわらず、(1)躓きの原因となり得る異常歩行WA(すり足)、(2)ふらつきの原因となりうる異常歩行WB(着地方法の異常)、および(3)健常歩行WCの、3つの状態を精度良く判定することができる。
【0041】
(第2の実施形態)
図7は本実施形態の歩行評価装置701のブロック図である。第1の実施形態の歩行評価装置101と共通する部分の説明は可能な範囲で省略し、異なる点を説明する。
【0042】
歩行評価装置701は歩行周波数取得部107を有する。歩行周波数取得部107は加速度計測部102からの加速度データに基づいて歩行周波数FCを求める。歩行周波数FCは、踵が着地してから(図5の時刻t1)次に踵が着地するまで(図5の時刻t4)の時間の逆数に相当する。
【0043】
踵が着地する瞬間、Z方向の加速度信号には高周波のノイズが加わる。歩行周波数取得部107は加速度計測部102からの出力信号をハイパスフィルタで処理して得られる信号から、閾値を越える振幅の波が検知された場合に踵が着地したと判定する。なお、歩行周波数取得部107は、加速度計測部102からの他の方向の加速度信号や他のセンサ(例えば万歩計(登録商標))からの出力信号に基づいて歩行周波数を求める構成であっても構わないし、手動で歩行周期のデータを入力する構成でも構わない。
【0044】
健常歩行判定部106は、第1ピーク周波数FA、第2ピーク周波数FB及び歩行周波数FCに基づいて、対象者の歩行が異常歩行WBか健常歩行WCかを判定する。比(FB/FA)が1.5±ThBの範囲内であり、かつ、比(FA/FC)が2.0±ThCの範囲内である場合に、健常歩行判定部106は健常歩行WCと判定する。本実施形態ではThC=0.25を用いる。なお、比(FA/FC)についての範囲は1.75〜2.25の間で2.0を含む任意の範囲に設定されても構わない。
【0045】
本実施形態の歩行状態を判別する処理のフローチャートを図8に示す。以下、図6と異なる点を説明する。まず、歩行周波数取得部107が、歩行周波数FCを求める(ステップS701)。そして、健常歩行判定部106は、比(FB/FA)が1.5±ThBの範囲内であり、かつ、比(FA/FC)が2.0±ThCの範囲内であるかどうかを判定し(ステップS702)、2つの条件の双方を満たす場合に(ステップS702:Yes)、健常歩行判定部106は健常歩行WCと判定する。2つの条件のいずれか一方でも満たさない場合(ステップS702:No)、健常歩行判定部106は異常歩行WBと判定する。
【0046】
本実施形態によれば、健常歩行WCの判定精度をさらに向上させることができる。
【0047】
(第3の実施形態)
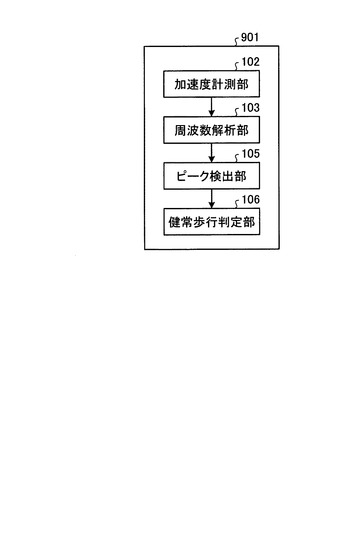
図9は本実施形態の歩行評価装置901のブロック図である。歩行評価装置901は、第1の実施形態の歩行評価装置101からすり足判定部104を省いた構成である。
【0048】
例えばすり足で歩行しないことが明らかな対象者の歩行評価を行う場合、歩行評価装置901の構成で十分である。
【0049】
異常歩行WA(すり足)の場合、ピーク周波数は上述した特徴を示さない。歩行評価装置901は異常歩行WAと異常歩行WBの区別を行わず、異常歩行WA・WBか、健常歩行WCかの2つの状態の判定を行う目的で使用する場合も、歩行評価装置901の構成で十分である。
【0050】
なお、第2の実施形態で説明した歩行周波数取得部107を備える構成であっても構わない。
【0051】
本実施形態によれば、第1の実施形態や第2の実施形態に比べて、歩行評価装置を安価に提供できる。
【0052】
上述した各実施形態で登場した、加速度計測部102、周波数解析部103、すり足判定部104、ピーク検出部105、健常歩行判定部106及び歩行周波数取得部107は、半導体集積回路で実現されても構わないし、1又は複数のプロセッサでプログラムを動作させることにより実現されても構わないし、これらの組み合わせで実現されることもできる。また、加速度計測部102の加速度センサ部分については、半導体式や機械式など、種々の公知なものを用いることができる。
【0053】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0054】
101,701,901 歩行評価装置
102 加速度計測部
103 周波数解析部
107 歩行周波数取得部
104 すり足判定部
105 ピーク検出部
106 健常歩行判定部
202 ベルト
501 股関節
502 膝
503 つま先
504 踵
【特許請求の範囲】
【請求項1】
対象者の足部の加速度を計測して加速度信号を出力する加速度計測部と、
前記加速度信号の周波数スペクトル分布を求める周波数解析部と、
前記周波数スペクトル分布から、最大のパワー値を持つ第1ピーク周波数及び2番目に大きいパワー値を持つ第2ピーク周波数を検出するピーク検出部と、
前記第1ピーク周波数と前記第2ピーク周波数との関係に基づいて、健常歩行か着地が不適切な異常歩行かを判定する健常歩行判定部と、
を備える歩行評価装置。
【請求項2】
前記周波数スペクトル分布に、閾値以上のパワー値を持つ周波数成分が存在しない場合に、すり足歩行であると判定するすり足判定部を更に備える請求項1に記載の歩行評価装置。
【請求項3】
前記健常歩行判定部は、前記第1ピーク周波数に対する前記第2ピーク周波数の比が第1基準範囲内であるような、前記第1ピーク周波数及び前記第2ピーク周波数が入力された場合に前記健常歩行であると判定する、請求項1または請求項2に記載の歩行評価装置。
【請求項4】
前記対象者の歩行周波数を求める歩行周波数計測部を更に備え、
前記健常歩行判定部は、前記第1ピークの周波数に対する前記第2ピークの周波数の比が前記第1基準範囲内であり、かつ、前記第1ピークの周波数に対する前記歩行周波数の比が第2基準範囲内であるような、前記第1ピーク周波数、前記第2ピーク周波数及び前記歩行周波数が入力された場合に、前記健常歩行であると判定する、請求項1または請求項2に記載の歩行評価装置。
【請求項5】
前記第2基準範囲は2.0を含み、1.75から2.25までの間に設定される幅が0.5以下の範囲である、請求項4に記載の歩行評価装置。
【請求項6】
前記第1基準範囲は1.5を含み、1.25から1.75までの間に設定される幅が0.5以下の範囲である、請求項3から請求項5のいずれか一項に記載の歩行評価装置。
【請求項7】
前記すり足判定部は、所定の周波数帯域内で閾値以上のパワー値を持つ周波数成分が存在しない場合に、すり足歩行であると判定し、
前記ピーク検出部は、前記所定の周波数帯域内で前記第1ピーク周波数及び前記第2ピーク周波数を検出する、請求項2から請求項6のいずれか一項に記載の歩行評価装置。
【請求項8】
前記所定の周波数帯域としては、0.5Hz以上10Hz未満等、対象脚自体の関節運動に起因する波形が観察される低周波数帯域のみを対象とし、評価することが可能な請求項7に記載の歩行評価装置。
【請求項1】
対象者の足部の加速度を計測して加速度信号を出力する加速度計測部と、
前記加速度信号の周波数スペクトル分布を求める周波数解析部と、
前記周波数スペクトル分布から、最大のパワー値を持つ第1ピーク周波数及び2番目に大きいパワー値を持つ第2ピーク周波数を検出するピーク検出部と、
前記第1ピーク周波数と前記第2ピーク周波数との関係に基づいて、健常歩行か着地が不適切な異常歩行かを判定する健常歩行判定部と、
を備える歩行評価装置。
【請求項2】
前記周波数スペクトル分布に、閾値以上のパワー値を持つ周波数成分が存在しない場合に、すり足歩行であると判定するすり足判定部を更に備える請求項1に記載の歩行評価装置。
【請求項3】
前記健常歩行判定部は、前記第1ピーク周波数に対する前記第2ピーク周波数の比が第1基準範囲内であるような、前記第1ピーク周波数及び前記第2ピーク周波数が入力された場合に前記健常歩行であると判定する、請求項1または請求項2に記載の歩行評価装置。
【請求項4】
前記対象者の歩行周波数を求める歩行周波数計測部を更に備え、
前記健常歩行判定部は、前記第1ピークの周波数に対する前記第2ピークの周波数の比が前記第1基準範囲内であり、かつ、前記第1ピークの周波数に対する前記歩行周波数の比が第2基準範囲内であるような、前記第1ピーク周波数、前記第2ピーク周波数及び前記歩行周波数が入力された場合に、前記健常歩行であると判定する、請求項1または請求項2に記載の歩行評価装置。
【請求項5】
前記第2基準範囲は2.0を含み、1.75から2.25までの間に設定される幅が0.5以下の範囲である、請求項4に記載の歩行評価装置。
【請求項6】
前記第1基準範囲は1.5を含み、1.25から1.75までの間に設定される幅が0.5以下の範囲である、請求項3から請求項5のいずれか一項に記載の歩行評価装置。
【請求項7】
前記すり足判定部は、所定の周波数帯域内で閾値以上のパワー値を持つ周波数成分が存在しない場合に、すり足歩行であると判定し、
前記ピーク検出部は、前記所定の周波数帯域内で前記第1ピーク周波数及び前記第2ピーク周波数を検出する、請求項2から請求項6のいずれか一項に記載の歩行評価装置。
【請求項8】
前記所定の周波数帯域としては、0.5Hz以上10Hz未満等、対象脚自体の関節運動に起因する波形が観察される低周波数帯域のみを対象とし、評価することが可能な請求項7に記載の歩行評価装置。
【図1】


【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図4A】
【図4B】
【図4C】
【図4D】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図4A】
【図4B】
【図4C】
【図4D】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−59489(P2013−59489A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199548(P2011−199548)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]