
歪み相殺を備えた磁界発生器パッチ
【課題】磁界発生器を提供する。
【解決手段】磁界発生器は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流を使用して主発生器コイルを駆動するよう連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、定義済みベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するよう連結されている。
【解決手段】磁界発生器は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流を使用して主発生器コイルを駆動するよう連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、定義済みベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するよう連結されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的には医療機器に関し、特に医療用プローブの追跡のための方法及びシステムに関する。
【背景技術】
【0002】
いくつかの磁気位置追跡システムは、既知の磁界を発生させて、並びにプローブ内に固定された磁界センサを使用して磁界を測定することによって、患者体内のカテーテル又は他のプローブの位置を追跡する。この種のシステムは、その開示を参照により本明細書に全てを援用した、例えば、米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT国際公開第WO 96/05768号、並びに米国特許出願公開第2002/0065455号、同第2003/0120150号及び同第2004/0068178号に記載されている。
【0003】
その開示を参照により本明細書に援用した、米国特許第6,177,792号は、複数個のラジエターコイルとそれらに連結されたドライバー回路を含む磁界を発生する装置を記載している。ドライバー回路は、複数個の駆動周波数にて磁界を発生するようコイルを駆動し、この中で複数個のラジエターコイルは、実質的に単一のそれぞれの駆動周波数のみで磁界を発生する。他のコイルによって発生した磁界を実質的に排除するために、回路は複数個のラジエターコイルの少なくとも1つに組み込まれている。
【発明の概要】
【課題を解決するための手段】
【0004】
以下の本明細書に記載されている本発明の一実施形態は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む磁界発生器を提供する。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流で主発生器コイルを駆動するように連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、並びに定義済みのベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するように連結されている。
【0005】
いくつかの実施形態では、基材は可撓性であり、患者の身体に取付けられるよう構成されている。一実施形態では、基材はプリント基板(PCB)を含み、並びに主発生器コイル、少なくとも1つの磁界センサ及び少なくとも1つのシムコイルは、PCB上にプリントされている導電体を含む。開示された実施形態では、少なくとも1つのシムコイルは複数のシムコイルを含み、補正回路は、磁界センサから受信した信号に応答して、シムコイルを駆動するための複数のそれぞれの駆動電流を発生するように構成されている。
【0006】
別の実施形態では、複数のシムコイルは、基材上の別々の互いに離れた位置で配置されている。一実施形態では、複数のシムコイルは、基材の別々のそれぞれの副区域を取り囲む導電体を含む。例示的実施形態では、主コイルは、シムコイルの副区域を含有する基材の区域を取り囲む。
【0007】
更に別の実施形態では、補正回路が、定義済みベースラインからの偏位を検出し、偏位を相殺する駆動電流を見積もり、見積もられた駆動電流を使用して、少なくとも1つのシムコイルを駆動するように連結されている。更に別の実施形態では、補正回路は、偏位が存在しない場合、少なくとも1つの磁界センサによって生成された信号を測定することによって、ベースラインを見積もるように連結されており、偏位が存在する場合は、ベースラインを少なくとも1つの磁界センサによって生成された信号と比較することによって、駆動電流を発生するように連結されている。
【0008】
本発明の実施形態によって、更に提供されるものとしては、基材上に配置されている主発生器コイルを、選択された周波数にて駆動電流を使用して駆動することを含む方法がある。信号は、基材上に配置されている少なくとも1つの感知コイルから、選択された周波数にて受信される。定義済みのベースラインからの信号における偏位に応答して、基材上に配置されている少なくとも1つのシムコイルを、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して駆動する。
【0009】
本発明は、以下の本発明の実施形態の詳細な説明を以下の図面と併せ読むことでより完全に理解されるであろう。
【図面の簡単な説明】
【0010】
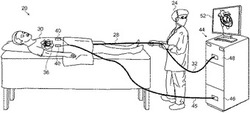
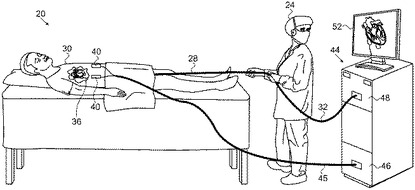
【図1】本発明の実施形態による、磁気位置追跡のためのシステムの概略描写図。
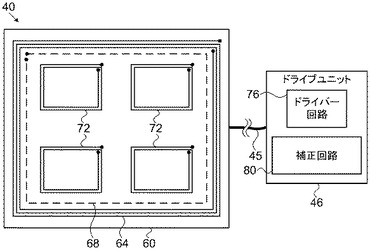
【図2】本発明の実施形態による、磁気位置追跡のためのシステムの要素を概略的に図示するブロック図。
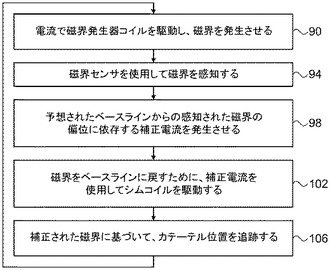
【図3】本発明の実施形態による、磁気位置追跡システム内の磁界歪みを補正するための方法を概略的に図示したフローチャート。
【発明を実施するための形態】
【0011】
概論
いくつかの医療用位置追跡システムは、位置依存性磁界を発生させることによって、及びプローブにおける磁界を感知することによって、体内のプローブの位置を測定する。本明細書では主磁界と呼ばれる磁界は、典型的には、既知の位置を有する1つ又はそれより多くの磁界発生器コイルによって発生する。しかしながら実際の操作環境では、例えば、近くにある金属製物体の存在によって、主磁界は歪められ得る。この種の歪みは、誤った位置測定をもたらし得る。
【0012】
本明細書に記載されている本発明の実施形態は、磁気位置追跡のための改善された方法及びシステムを提供する。開示された技術は、磁界発生器コイルに隣接して据付けられた少なくとも1つの磁界センサと少なくとも1つのシムコイルを使用して、所与の磁界発生器コイルの主磁界における歪みを補正する。いくつかの実施形態では、磁界センサは主磁界を感知し、並びに感知された磁界を指示する信号を生成する。補正回路はこの信号を使用して、シムコイルを駆動する駆動電流を発生する。定義済みのベースラインから主磁界の偏位を補正するように、駆動電流を発生させる。
【0013】
典型的には、主磁界は交流(AC)磁場を含む。補正回路は、その振幅(大きさと位相を含む)がシムコイルに、主磁界を定義済みのベースラインに戻す補正磁界を発生させるようなAC補正電流を発生する。
【0014】
偏位が金属妨害によって生じる場合、補正磁界がこの妨害を相殺し、それがシステムの位置測定で歪みを生じさせることを防止する。一実施形態では、補正回路は、リアルタイムの適応様式で動作し、したがって、経時的に変化する歪みを補正することが可能である。
【0015】
いくつかの実施形態では、磁界発生コイル、磁界センサ及びシムコイルは、患者の身体に取付けられる可撓性のパッチのような、一般的な基材上に配置されている。パッチ要素がごく近接していること、並びに追跡される体内プローブに近接していることが、高精度な歪み補正処理を可能にする。いくつかの実施形態では、補正の精度は、1つの磁界発生器コイルにつき、複数のシムコイル及び/又は複数の感知コイルを使用することによって、更に精密化される。
【0016】
システムの説明
図1は、本発明の一実施形態による、磁気位置追跡を使用する心臓カテーテルのためのシステム20の概略描写図である。システム20は、例えば、Biosense−Webster Inc.(Diamond Bar,California)製造の、CARTO(商標)システムに基づくことができる。システム20では、医師24(又は、他の操作者)が、カテーテル28(又は、他のプローブ)を患者30の身体内に挿入する。
【0017】
カテーテル28は、医師によって取り扱われる近位端、及び患者の身体を通って誘導操作される遠位端36を有する。医者は、近位端を操作することによって、カテーテルの遠位端を移動させる。カテーテル28は、ケーブル32を使用して、制御コンソール44に接続される。本明細書に記載された実施形態では、カテーテル28が患者の心臓に挿入され、1つ又はそれより多くの心室のアブレーション及び/又は電子生理学的マップの作成のために使用される。あるいは、カテーテル28は、心臓内又は他の身体器官内で、他の治療目的及び/又は診断目的のために、必要な変更を加えて使用されてもよい。
【0018】
コンソール44は、磁気位置検知を使用して、心臓内部の遠位端36の位置座標を決定する。この目的のために、パッチ40が患者30の身体に取付けられる。理解を容易にするために、図1は2つのパッチを示しているが、別の実施形態では、システム20は、任意の所望の数のパッチ40を含んでよい。ぞれぞれのパッチ40は、磁界発生器コイル(図2に詳細に表示)、及び以下に記載されている他の要素を含む。パッチ40は、ケーブル45によって、コンソール44内のドライバーユニット46に連結されている。
【0019】
ドライバーユニット46は、患者30の体内で磁界(主磁界と呼ばれる)を発生するようにパッチ40内の磁界発生器コイルを駆動する。カテーテル28の遠位端36内の磁気位置センサ(図中表示なし)が、これら磁界に応答して電気信号を発生する。コンソール44内のプロセッサ48が、典型的には場所及び配向の座標を含む、遠位端36の位置座標を決定するために、これらの信号を処理する。この種の磁気位置追跡方法は、上記の米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT国際公開第WO 96/05768号、並びに米国特許出願公開第2002/0065455号、同第2003/0120150号及び同第2004/0068178号に詳細に記載されている。
【0020】
カテーテル28から受信された信号に基づいて、プロセッサ44がディスプレイ52を駆動し、患者の体内の遠位端36の位置に関するビジュアルフィードバック並びに進行中の手順に関するステータス情報及びガイダンスを医者24に提示する。
【0021】
図1に示されたシステム20の構成は、概念的理解を容易にするために純粋に選択された例示的構成である。別の実施形態では、任意の他の好適なシステム構成が用いられ得る。プロセッサ48は、典型的には、カテーテル28から信号を受け取り、コンソール44の他の構成要素を制御するための、適切なフロントエンド回路及びインターフェイス回路を備える、汎用コンピュータを含む。プロセッサ48は、本明細書に記載される機能を実行するように、ソフトウェアでプログラムすることができる。そのソフトウェアは、例えば、ネットワークを介して電子的形態でプロセッサ48にダウンロードしてもよく、又は光学的、磁気的若しくは電子的記憶メディアなどの、非一過性の有形のメディア上に提供されてもよい。あるいは、プロセッサ48の一部又は全ての機能を、専用の又はプログラム可能な、デジタルハードウェア構成要素によって実行してもよい。
【0022】
歪み相殺を備えた磁界発生器パッチ
上述したように、それぞれのパッチ40内の磁界発生器コイルは、患者30の身体内で主磁界を発生する。カテーテル28の遠位端36での位置センサが、これら磁界を感知し、パッチに対する遠位端の位置を指示する信号をプロセッサ48に提供する。
【0023】
多くの実際のシナリオでは、例えば、近くの金属製物体などによって、主磁界が歪められる。この歪みを考慮しない限り、この歪みがプロセッサ48に誤った位置測定を引き起こし得る。いくつかの実施形態では、システム20は、以下に記載されるような順応性のあるやり方で、主磁界内の歪みを相殺する。
【0024】
図2は、本発明の実施形態による、システム20の要素を概略的に図示したブロック図である。図は、ケーブル45によってパッチ40に接続されている、ドライブユニット46を示している。概念的理解を容易にするために、図中には単一のパッチ40のみが示されている。典型的には、ドライブユニット46は、ケーブル45によって、この種の複数のパッチ40に接続されている。
【0025】
パッチ40は、取付けられる場合に、患者の身体の形状にぴったりと一致するように、典型的には可撓性である基材60を含む。パッチは、例えば、接着性材料又はテープなどの任意の好適な方法を使用して身体に取付けられてよい。本実施例では、磁界発生コイル64、磁界感知コイル68及び4つのシムコイル72である数個のコイルが、基板60上に配置されている。ドライブユニット46は、ドライバー回路76と補正回路80とを含む。
【0026】
ドライバー回路76は、選択された周波数にて、AC駆動電流を使用して磁界発生コイル64を駆動する。駆動電流は、コイル64が主磁界を発生するようにする。感知コイル68が、コイル64付近で主磁界を感知し、主磁界の周波数を有するそれぞれの信号を生成する。主磁界が歪められていない場合(例えば、近くに金属製物体がない場合)、コイル68によって感知された磁界は、典型的には定義済みのベースラインに準拠するだろう。主磁界が歪められている場合、コイル68によって感知された磁界は、典型的にはベースラインから偏移するだろう。
【0027】
ユニット46内の補正回路80は、感知コイル68からの信号を受信する。一般的に、この信号は、主磁界の信号と同一な周波数を有する。感知コイル68から受信された信号を使用して、補正回路80は、定義済みのベースラインからの主磁界の偏位を特定する。補正回路は、1つ又はそれより多くの補正電流を発生し、これら補正電流がこれら偏位に関して補正し、補正電流を使用してシムコイル72を駆動する。
【0028】
補正電流の振幅は、シムコイルが磁界の歪みを相殺する補正磁界を発生させるように、回路80によって設定されている。換言すれば、シムコイル72によって発生された補正磁界が、主磁界を定義済みのベースラインへと戻す。この補正の結果として、パッチ40によって発生された正味の磁界が、定義済みのベースラインに準拠する。本特許出願の文脈及び特許請求の範囲において、用語「振幅」は、位相及び大きさ成分の双方を含むAC信号の複合した振幅を指すように広範囲に使用されている。
【0029】
補正回路80は、任意の好適な方法で、主磁界内の偏位を検出及び補正してよい。例示的実施形態では、主磁界を歪め得る要素が存在しない制御された環境内で磁界発生器コイル64を最初に操作することによって、補正回路がベースラインを見積もる。これら条件下において、センサコイル68が磁界を感知し、感知コイル信号がベースラインとして見なされる。平常操作中では、偏位が存在し得る場合でも、ベースラインと感知コイル信号とを比較することによって、補正回路80がシムコイルに対する駆動電流を発生する。一実施形態では、シムコイル72を駆動する場合、ベースライン磁界からの偏位を相殺するであろう補正電流の組み合わせを補正回路が探索する。例えば、感知コイル68の信号とベースラインとの差異に基づいたアナログ又はデジタルフィードバックを使用しての、この差異を零にするよう試みる欲張り法又は全数探索処理によって、又は任意の他の好適なスキームを使用して探索が実行され得る。
【0030】
典型的には、補正回路80は、順応性のあるやり方で、上述の補正処理を連続的に又は周期的に実行する。換言すれば、補正回路は、感知コイル68からの信号を連続的又は周期的に受信し、並びに適切な補正電流を使用してシムコイル72を駆動する。したがって、システム20は、主磁界内の時間変動歪みを補正することが可能である。このような時間変動歪みは、手術用ツール又は他の装置のような移動する物体によって引き起こされ得る。
【0031】
いくつかの実施形態では、基板60は、可撓性プリント基板(PCB)材料と、PCB導電体を使用して配置されたコイル64、68及び72を含む。図2の例では、磁界発生器コイル64及びシムコイル72は、基板60の一方の側に配置されていて、感知コイル68は、基板の反対側に配置されている。しかしながら、この構成は、純粋に概念的理解を容易にするために選択されている。代替的な実施形態では、他の任意の適当な構成を用いることができる。
【0032】
例えば、基材60は堅くてもよく、可撓性である必要はない。いくつかの実施形態では、パッチ40の要素は、患者の身体に取付けられなくてもよく、むしろ互いに対して既知の位置にてしっかりと固定されてもよい。いくつかの実施形態では、主磁界は、任意の他の適当な種類のセンサによって感知されてもよく、感知コイルである必要はない。
【0033】
図2の例では、複数のシムコイル72が、基材60上の別々の、互いに離れた位置にて配置されている。複数のシムコイルは、基材の別々のそれぞれの副区域を取り囲む導電体を含み、並びに磁界発生器コイル64が、シムコイルの副区域を含有する基材60の区域を取り囲む。しかしながら、あるいは、任意の他の適切な構成が使用され得る。
【0034】
本例は、単一の磁界発生器コイル、単一の感知コイル及び4つのシムコイルを表示してはいるが、別の実施形態では、パッチ40は、任意の好適な数の磁界発生器コイル、磁界感知センサ及びシムコイルを含んでよい。例示的実施形態では、パッチ40は、単一のシムコイルを含む。別の例示的実施形態では、パッチ40は、それぞれの1つのシムコイルにつき、複数の磁界センサ(例えば、感知コイル)を含み得る。本実施形態では、対応する感知コイルによって感知された磁界に基づいて発生されるそれぞれの補正電流を使用して、補正回路がそれぞれのシムコイルを駆動する。
【0035】
補正回路80は、アナログ回路を使用して、デジタル回路を使用して、又はその双方を使用して実行され得る。いくつかの実施形態では、補正回路80の機能は、例えばプロセッサ48の一部としてソフトウェア内で実行され得る。
【0036】
歪み相殺方法説明
図3は、本発明の実施形態による、システム20内の磁界歪みを補正するための方法を概略的に図示しているフリーチャートである。以下の説明は、単一の磁界発生器コイル、単一の感知コイル及び単一のシムコイルを有する単一のパッチ40のことを述べている。しかしながら、方法は、他のパッチ構成でも同様な様式で適用され得る。
【0037】
方法は、主駆動工程90において、選択された周波数にて駆動電流を使用してパッチ40の磁界発生器コイル64を駆動する、ドライバー回路76で開始する。この駆動電流に応答して、磁界発生器コイル64が、選択された周波数にて主磁界を発生する。
【0038】
感知工程94にて、パッチ40の感知コイル68が主磁界を感知して、選択された周波数にて対応する信号を生成する。補正電流発生工程98において、補正回路80が感知コイル68からの信号を受信し、その信号を使用して補正電流を発生する。補正電流は、コイル68によって感知されたような、その定義されたベースラインからの主磁界の偏位に依存する。シムコイル72を駆動する際に、補正電流は、主磁界を定義済みのベースラインに戻すように構成されている。換言すれば、補正電流は、主磁界内の偏位に関して補正するように構成されている。
【0039】
補正駆動工程102において、補正回路80が、補正電流を使用してシムコイル72を駆動する。結果として、シムコイルが、主磁界内の歪みに関して補正する補正磁界を発生する。位置追跡工程106において、システム20が、補正された磁界を使用して、患者30の体内のカテーテル28の位置を追跡する。システム20の位置測定が補正された磁界に基づいているために、それらが主磁界の歪みによって影響されず、したがって正確である。
【0040】
上記に述べた実施形態は、例として引用したものであって、本発明は上記に具体的に図示及び記載したものに限定されないことは認識されるであろう。むしろ、本発明の範囲には、上で説明した様々な特徴の組み合わせと部分的組み合わせの両方、並びにそれらの変形形態及び修正形態が含まれ、これらは、上述の説明を読むことによって当業者には想到されるであろうものであり、先行技術では開示されていないものである。参照により本特許出願に組み込まれる文書は、いずれかの用語が、それらの組み込まれた文書内で、本明細書で明示的又は暗黙的に行なわれる定義と相反するように定義される場合を除き、本出願の一体部分と見なされるべきであり、本明細書における定義のみが考慮されるべきである。
【0041】
〔実施の態様〕
(1) 磁界発生器であって、
基材と、
全てが前記基材上に配置されている主発生器コイル、少なくとも1つの磁界センサ、及び少なくとも1つのシムコイルと、
選択された周波数にて駆動電流を使用して前記主発生器コイルを駆動するよう連結されたドライバー回路と、
前記少なくとも1つの磁界センサから前記選択された周波数にて信号を受信し、並びに定義済みベースラインからの前記信号における偏位に応答して、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するよう連結されている補正回路と、を含む、磁界発生器。
(2) 前記基材が可撓性であり、患者の身体に取付けられるよう構成されている、実施態様1に記載の磁界発生器。
(3) 前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、実施態様1に記載の磁界発生器。
(4) 前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記補正回路が、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生するように構成されている、実施態様1に記載の磁界発生器。
(5) 前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、実施態様4に記載の磁界発生器。
(6) 前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、実施態様5に記載の磁界発生器。
(7) 前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、実施態様6に記載の磁界発生器。
(8) 前記補正回路が、前記定義済みベースラインからの前記偏位を検出し、前記偏位を相殺する前記駆動電流を見積もり、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するように連結されている、実施態様1に記載の磁界発生器。
(9) 前記補正回路が、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もるように連結されており、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生するように連結されている、実施態様1に記載の磁界発生器。
(10) 基材上に配置されている主発生器コイルを、選択された周波数にて駆動電流を使用して駆動することと、
前記基材上に配置されている少なくとも1つの感知コイルから、前記選択された周波数にて、信号を受信することと、
定義済みベースラインからの前記信号における偏位に応答して、前記基材上に配置されている少なくとも1つのシムコイルを、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、駆動することと、を含む、方法。
【0042】
(11) 前記基材が可撓性であって、患者の身体に取付けられるよう構成されている、実施態様10に記載の方法。
(12) 前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、実施態様10に記載の方法。
(13) 前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記少なくとも1つのシムコイルを駆動することが、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生することを含む、実施態様10に記載の方法。
(14) 前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、実施態様13に記載の方法。
(15) 前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、実施態様14に記載の方法。
(16) 前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、実施態様15に記載の方法。
(17) 前記少なくとも1つのシムコイルを駆動することが、前記定義済みベースラインからの前記偏位を検出することと、前記偏位を相殺する前記駆動電流を見積もることと、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動することと、を含む、実施態様10に記載の方法。
(18) 前記少なくとも1つのシムコイルを駆動することが、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もることと、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生させることと、を含む、実施態様10に記載の方法。
【技術分野】
【0001】
本発明は、一般的には医療機器に関し、特に医療用プローブの追跡のための方法及びシステムに関する。
【背景技術】
【0002】
いくつかの磁気位置追跡システムは、既知の磁界を発生させて、並びにプローブ内に固定された磁界センサを使用して磁界を測定することによって、患者体内のカテーテル又は他のプローブの位置を追跡する。この種のシステムは、その開示を参照により本明細書に全てを援用した、例えば、米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT国際公開第WO 96/05768号、並びに米国特許出願公開第2002/0065455号、同第2003/0120150号及び同第2004/0068178号に記載されている。
【0003】
その開示を参照により本明細書に援用した、米国特許第6,177,792号は、複数個のラジエターコイルとそれらに連結されたドライバー回路を含む磁界を発生する装置を記載している。ドライバー回路は、複数個の駆動周波数にて磁界を発生するようコイルを駆動し、この中で複数個のラジエターコイルは、実質的に単一のそれぞれの駆動周波数のみで磁界を発生する。他のコイルによって発生した磁界を実質的に排除するために、回路は複数個のラジエターコイルの少なくとも1つに組み込まれている。
【発明の概要】
【課題を解決するための手段】
【0004】
以下の本明細書に記載されている本発明の一実施形態は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む磁界発生器を提供する。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流で主発生器コイルを駆動するように連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、並びに定義済みのベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するように連結されている。
【0005】
いくつかの実施形態では、基材は可撓性であり、患者の身体に取付けられるよう構成されている。一実施形態では、基材はプリント基板(PCB)を含み、並びに主発生器コイル、少なくとも1つの磁界センサ及び少なくとも1つのシムコイルは、PCB上にプリントされている導電体を含む。開示された実施形態では、少なくとも1つのシムコイルは複数のシムコイルを含み、補正回路は、磁界センサから受信した信号に応答して、シムコイルを駆動するための複数のそれぞれの駆動電流を発生するように構成されている。
【0006】
別の実施形態では、複数のシムコイルは、基材上の別々の互いに離れた位置で配置されている。一実施形態では、複数のシムコイルは、基材の別々のそれぞれの副区域を取り囲む導電体を含む。例示的実施形態では、主コイルは、シムコイルの副区域を含有する基材の区域を取り囲む。
【0007】
更に別の実施形態では、補正回路が、定義済みベースラインからの偏位を検出し、偏位を相殺する駆動電流を見積もり、見積もられた駆動電流を使用して、少なくとも1つのシムコイルを駆動するように連結されている。更に別の実施形態では、補正回路は、偏位が存在しない場合、少なくとも1つの磁界センサによって生成された信号を測定することによって、ベースラインを見積もるように連結されており、偏位が存在する場合は、ベースラインを少なくとも1つの磁界センサによって生成された信号と比較することによって、駆動電流を発生するように連結されている。
【0008】
本発明の実施形態によって、更に提供されるものとしては、基材上に配置されている主発生器コイルを、選択された周波数にて駆動電流を使用して駆動することを含む方法がある。信号は、基材上に配置されている少なくとも1つの感知コイルから、選択された周波数にて受信される。定義済みのベースラインからの信号における偏位に応答して、基材上に配置されている少なくとも1つのシムコイルを、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して駆動する。
【0009】
本発明は、以下の本発明の実施形態の詳細な説明を以下の図面と併せ読むことでより完全に理解されるであろう。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態による、磁気位置追跡のためのシステムの概略描写図。
【図2】本発明の実施形態による、磁気位置追跡のためのシステムの要素を概略的に図示するブロック図。
【図3】本発明の実施形態による、磁気位置追跡システム内の磁界歪みを補正するための方法を概略的に図示したフローチャート。
【発明を実施するための形態】
【0011】
概論
いくつかの医療用位置追跡システムは、位置依存性磁界を発生させることによって、及びプローブにおける磁界を感知することによって、体内のプローブの位置を測定する。本明細書では主磁界と呼ばれる磁界は、典型的には、既知の位置を有する1つ又はそれより多くの磁界発生器コイルによって発生する。しかしながら実際の操作環境では、例えば、近くにある金属製物体の存在によって、主磁界は歪められ得る。この種の歪みは、誤った位置測定をもたらし得る。
【0012】
本明細書に記載されている本発明の実施形態は、磁気位置追跡のための改善された方法及びシステムを提供する。開示された技術は、磁界発生器コイルに隣接して据付けられた少なくとも1つの磁界センサと少なくとも1つのシムコイルを使用して、所与の磁界発生器コイルの主磁界における歪みを補正する。いくつかの実施形態では、磁界センサは主磁界を感知し、並びに感知された磁界を指示する信号を生成する。補正回路はこの信号を使用して、シムコイルを駆動する駆動電流を発生する。定義済みのベースラインから主磁界の偏位を補正するように、駆動電流を発生させる。
【0013】
典型的には、主磁界は交流(AC)磁場を含む。補正回路は、その振幅(大きさと位相を含む)がシムコイルに、主磁界を定義済みのベースラインに戻す補正磁界を発生させるようなAC補正電流を発生する。
【0014】
偏位が金属妨害によって生じる場合、補正磁界がこの妨害を相殺し、それがシステムの位置測定で歪みを生じさせることを防止する。一実施形態では、補正回路は、リアルタイムの適応様式で動作し、したがって、経時的に変化する歪みを補正することが可能である。
【0015】
いくつかの実施形態では、磁界発生コイル、磁界センサ及びシムコイルは、患者の身体に取付けられる可撓性のパッチのような、一般的な基材上に配置されている。パッチ要素がごく近接していること、並びに追跡される体内プローブに近接していることが、高精度な歪み補正処理を可能にする。いくつかの実施形態では、補正の精度は、1つの磁界発生器コイルにつき、複数のシムコイル及び/又は複数の感知コイルを使用することによって、更に精密化される。
【0016】
システムの説明
図1は、本発明の一実施形態による、磁気位置追跡を使用する心臓カテーテルのためのシステム20の概略描写図である。システム20は、例えば、Biosense−Webster Inc.(Diamond Bar,California)製造の、CARTO(商標)システムに基づくことができる。システム20では、医師24(又は、他の操作者)が、カテーテル28(又は、他のプローブ)を患者30の身体内に挿入する。
【0017】
カテーテル28は、医師によって取り扱われる近位端、及び患者の身体を通って誘導操作される遠位端36を有する。医者は、近位端を操作することによって、カテーテルの遠位端を移動させる。カテーテル28は、ケーブル32を使用して、制御コンソール44に接続される。本明細書に記載された実施形態では、カテーテル28が患者の心臓に挿入され、1つ又はそれより多くの心室のアブレーション及び/又は電子生理学的マップの作成のために使用される。あるいは、カテーテル28は、心臓内又は他の身体器官内で、他の治療目的及び/又は診断目的のために、必要な変更を加えて使用されてもよい。
【0018】
コンソール44は、磁気位置検知を使用して、心臓内部の遠位端36の位置座標を決定する。この目的のために、パッチ40が患者30の身体に取付けられる。理解を容易にするために、図1は2つのパッチを示しているが、別の実施形態では、システム20は、任意の所望の数のパッチ40を含んでよい。ぞれぞれのパッチ40は、磁界発生器コイル(図2に詳細に表示)、及び以下に記載されている他の要素を含む。パッチ40は、ケーブル45によって、コンソール44内のドライバーユニット46に連結されている。
【0019】
ドライバーユニット46は、患者30の体内で磁界(主磁界と呼ばれる)を発生するようにパッチ40内の磁界発生器コイルを駆動する。カテーテル28の遠位端36内の磁気位置センサ(図中表示なし)が、これら磁界に応答して電気信号を発生する。コンソール44内のプロセッサ48が、典型的には場所及び配向の座標を含む、遠位端36の位置座標を決定するために、これらの信号を処理する。この種の磁気位置追跡方法は、上記の米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT国際公開第WO 96/05768号、並びに米国特許出願公開第2002/0065455号、同第2003/0120150号及び同第2004/0068178号に詳細に記載されている。
【0020】
カテーテル28から受信された信号に基づいて、プロセッサ44がディスプレイ52を駆動し、患者の体内の遠位端36の位置に関するビジュアルフィードバック並びに進行中の手順に関するステータス情報及びガイダンスを医者24に提示する。
【0021】
図1に示されたシステム20の構成は、概念的理解を容易にするために純粋に選択された例示的構成である。別の実施形態では、任意の他の好適なシステム構成が用いられ得る。プロセッサ48は、典型的には、カテーテル28から信号を受け取り、コンソール44の他の構成要素を制御するための、適切なフロントエンド回路及びインターフェイス回路を備える、汎用コンピュータを含む。プロセッサ48は、本明細書に記載される機能を実行するように、ソフトウェアでプログラムすることができる。そのソフトウェアは、例えば、ネットワークを介して電子的形態でプロセッサ48にダウンロードしてもよく、又は光学的、磁気的若しくは電子的記憶メディアなどの、非一過性の有形のメディア上に提供されてもよい。あるいは、プロセッサ48の一部又は全ての機能を、専用の又はプログラム可能な、デジタルハードウェア構成要素によって実行してもよい。
【0022】
歪み相殺を備えた磁界発生器パッチ
上述したように、それぞれのパッチ40内の磁界発生器コイルは、患者30の身体内で主磁界を発生する。カテーテル28の遠位端36での位置センサが、これら磁界を感知し、パッチに対する遠位端の位置を指示する信号をプロセッサ48に提供する。
【0023】
多くの実際のシナリオでは、例えば、近くの金属製物体などによって、主磁界が歪められる。この歪みを考慮しない限り、この歪みがプロセッサ48に誤った位置測定を引き起こし得る。いくつかの実施形態では、システム20は、以下に記載されるような順応性のあるやり方で、主磁界内の歪みを相殺する。
【0024】
図2は、本発明の実施形態による、システム20の要素を概略的に図示したブロック図である。図は、ケーブル45によってパッチ40に接続されている、ドライブユニット46を示している。概念的理解を容易にするために、図中には単一のパッチ40のみが示されている。典型的には、ドライブユニット46は、ケーブル45によって、この種の複数のパッチ40に接続されている。
【0025】
パッチ40は、取付けられる場合に、患者の身体の形状にぴったりと一致するように、典型的には可撓性である基材60を含む。パッチは、例えば、接着性材料又はテープなどの任意の好適な方法を使用して身体に取付けられてよい。本実施例では、磁界発生コイル64、磁界感知コイル68及び4つのシムコイル72である数個のコイルが、基板60上に配置されている。ドライブユニット46は、ドライバー回路76と補正回路80とを含む。
【0026】
ドライバー回路76は、選択された周波数にて、AC駆動電流を使用して磁界発生コイル64を駆動する。駆動電流は、コイル64が主磁界を発生するようにする。感知コイル68が、コイル64付近で主磁界を感知し、主磁界の周波数を有するそれぞれの信号を生成する。主磁界が歪められていない場合(例えば、近くに金属製物体がない場合)、コイル68によって感知された磁界は、典型的には定義済みのベースラインに準拠するだろう。主磁界が歪められている場合、コイル68によって感知された磁界は、典型的にはベースラインから偏移するだろう。
【0027】
ユニット46内の補正回路80は、感知コイル68からの信号を受信する。一般的に、この信号は、主磁界の信号と同一な周波数を有する。感知コイル68から受信された信号を使用して、補正回路80は、定義済みのベースラインからの主磁界の偏位を特定する。補正回路は、1つ又はそれより多くの補正電流を発生し、これら補正電流がこれら偏位に関して補正し、補正電流を使用してシムコイル72を駆動する。
【0028】
補正電流の振幅は、シムコイルが磁界の歪みを相殺する補正磁界を発生させるように、回路80によって設定されている。換言すれば、シムコイル72によって発生された補正磁界が、主磁界を定義済みのベースラインへと戻す。この補正の結果として、パッチ40によって発生された正味の磁界が、定義済みのベースラインに準拠する。本特許出願の文脈及び特許請求の範囲において、用語「振幅」は、位相及び大きさ成分の双方を含むAC信号の複合した振幅を指すように広範囲に使用されている。
【0029】
補正回路80は、任意の好適な方法で、主磁界内の偏位を検出及び補正してよい。例示的実施形態では、主磁界を歪め得る要素が存在しない制御された環境内で磁界発生器コイル64を最初に操作することによって、補正回路がベースラインを見積もる。これら条件下において、センサコイル68が磁界を感知し、感知コイル信号がベースラインとして見なされる。平常操作中では、偏位が存在し得る場合でも、ベースラインと感知コイル信号とを比較することによって、補正回路80がシムコイルに対する駆動電流を発生する。一実施形態では、シムコイル72を駆動する場合、ベースライン磁界からの偏位を相殺するであろう補正電流の組み合わせを補正回路が探索する。例えば、感知コイル68の信号とベースラインとの差異に基づいたアナログ又はデジタルフィードバックを使用しての、この差異を零にするよう試みる欲張り法又は全数探索処理によって、又は任意の他の好適なスキームを使用して探索が実行され得る。
【0030】
典型的には、補正回路80は、順応性のあるやり方で、上述の補正処理を連続的に又は周期的に実行する。換言すれば、補正回路は、感知コイル68からの信号を連続的又は周期的に受信し、並びに適切な補正電流を使用してシムコイル72を駆動する。したがって、システム20は、主磁界内の時間変動歪みを補正することが可能である。このような時間変動歪みは、手術用ツール又は他の装置のような移動する物体によって引き起こされ得る。
【0031】
いくつかの実施形態では、基板60は、可撓性プリント基板(PCB)材料と、PCB導電体を使用して配置されたコイル64、68及び72を含む。図2の例では、磁界発生器コイル64及びシムコイル72は、基板60の一方の側に配置されていて、感知コイル68は、基板の反対側に配置されている。しかしながら、この構成は、純粋に概念的理解を容易にするために選択されている。代替的な実施形態では、他の任意の適当な構成を用いることができる。
【0032】
例えば、基材60は堅くてもよく、可撓性である必要はない。いくつかの実施形態では、パッチ40の要素は、患者の身体に取付けられなくてもよく、むしろ互いに対して既知の位置にてしっかりと固定されてもよい。いくつかの実施形態では、主磁界は、任意の他の適当な種類のセンサによって感知されてもよく、感知コイルである必要はない。
【0033】
図2の例では、複数のシムコイル72が、基材60上の別々の、互いに離れた位置にて配置されている。複数のシムコイルは、基材の別々のそれぞれの副区域を取り囲む導電体を含み、並びに磁界発生器コイル64が、シムコイルの副区域を含有する基材60の区域を取り囲む。しかしながら、あるいは、任意の他の適切な構成が使用され得る。
【0034】
本例は、単一の磁界発生器コイル、単一の感知コイル及び4つのシムコイルを表示してはいるが、別の実施形態では、パッチ40は、任意の好適な数の磁界発生器コイル、磁界感知センサ及びシムコイルを含んでよい。例示的実施形態では、パッチ40は、単一のシムコイルを含む。別の例示的実施形態では、パッチ40は、それぞれの1つのシムコイルにつき、複数の磁界センサ(例えば、感知コイル)を含み得る。本実施形態では、対応する感知コイルによって感知された磁界に基づいて発生されるそれぞれの補正電流を使用して、補正回路がそれぞれのシムコイルを駆動する。
【0035】
補正回路80は、アナログ回路を使用して、デジタル回路を使用して、又はその双方を使用して実行され得る。いくつかの実施形態では、補正回路80の機能は、例えばプロセッサ48の一部としてソフトウェア内で実行され得る。
【0036】
歪み相殺方法説明
図3は、本発明の実施形態による、システム20内の磁界歪みを補正するための方法を概略的に図示しているフリーチャートである。以下の説明は、単一の磁界発生器コイル、単一の感知コイル及び単一のシムコイルを有する単一のパッチ40のことを述べている。しかしながら、方法は、他のパッチ構成でも同様な様式で適用され得る。
【0037】
方法は、主駆動工程90において、選択された周波数にて駆動電流を使用してパッチ40の磁界発生器コイル64を駆動する、ドライバー回路76で開始する。この駆動電流に応答して、磁界発生器コイル64が、選択された周波数にて主磁界を発生する。
【0038】
感知工程94にて、パッチ40の感知コイル68が主磁界を感知して、選択された周波数にて対応する信号を生成する。補正電流発生工程98において、補正回路80が感知コイル68からの信号を受信し、その信号を使用して補正電流を発生する。補正電流は、コイル68によって感知されたような、その定義されたベースラインからの主磁界の偏位に依存する。シムコイル72を駆動する際に、補正電流は、主磁界を定義済みのベースラインに戻すように構成されている。換言すれば、補正電流は、主磁界内の偏位に関して補正するように構成されている。
【0039】
補正駆動工程102において、補正回路80が、補正電流を使用してシムコイル72を駆動する。結果として、シムコイルが、主磁界内の歪みに関して補正する補正磁界を発生する。位置追跡工程106において、システム20が、補正された磁界を使用して、患者30の体内のカテーテル28の位置を追跡する。システム20の位置測定が補正された磁界に基づいているために、それらが主磁界の歪みによって影響されず、したがって正確である。
【0040】
上記に述べた実施形態は、例として引用したものであって、本発明は上記に具体的に図示及び記載したものに限定されないことは認識されるであろう。むしろ、本発明の範囲には、上で説明した様々な特徴の組み合わせと部分的組み合わせの両方、並びにそれらの変形形態及び修正形態が含まれ、これらは、上述の説明を読むことによって当業者には想到されるであろうものであり、先行技術では開示されていないものである。参照により本特許出願に組み込まれる文書は、いずれかの用語が、それらの組み込まれた文書内で、本明細書で明示的又は暗黙的に行なわれる定義と相反するように定義される場合を除き、本出願の一体部分と見なされるべきであり、本明細書における定義のみが考慮されるべきである。
【0041】
〔実施の態様〕
(1) 磁界発生器であって、
基材と、
全てが前記基材上に配置されている主発生器コイル、少なくとも1つの磁界センサ、及び少なくとも1つのシムコイルと、
選択された周波数にて駆動電流を使用して前記主発生器コイルを駆動するよう連結されたドライバー回路と、
前記少なくとも1つの磁界センサから前記選択された周波数にて信号を受信し、並びに定義済みベースラインからの前記信号における偏位に応答して、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するよう連結されている補正回路と、を含む、磁界発生器。
(2) 前記基材が可撓性であり、患者の身体に取付けられるよう構成されている、実施態様1に記載の磁界発生器。
(3) 前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、実施態様1に記載の磁界発生器。
(4) 前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記補正回路が、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生するように構成されている、実施態様1に記載の磁界発生器。
(5) 前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、実施態様4に記載の磁界発生器。
(6) 前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、実施態様5に記載の磁界発生器。
(7) 前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、実施態様6に記載の磁界発生器。
(8) 前記補正回路が、前記定義済みベースラインからの前記偏位を検出し、前記偏位を相殺する前記駆動電流を見積もり、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するように連結されている、実施態様1に記載の磁界発生器。
(9) 前記補正回路が、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もるように連結されており、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生するように連結されている、実施態様1に記載の磁界発生器。
(10) 基材上に配置されている主発生器コイルを、選択された周波数にて駆動電流を使用して駆動することと、
前記基材上に配置されている少なくとも1つの感知コイルから、前記選択された周波数にて、信号を受信することと、
定義済みベースラインからの前記信号における偏位に応答して、前記基材上に配置されている少なくとも1つのシムコイルを、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、駆動することと、を含む、方法。
【0042】
(11) 前記基材が可撓性であって、患者の身体に取付けられるよう構成されている、実施態様10に記載の方法。
(12) 前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、実施態様10に記載の方法。
(13) 前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記少なくとも1つのシムコイルを駆動することが、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生することを含む、実施態様10に記載の方法。
(14) 前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、実施態様13に記載の方法。
(15) 前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、実施態様14に記載の方法。
(16) 前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、実施態様15に記載の方法。
(17) 前記少なくとも1つのシムコイルを駆動することが、前記定義済みベースラインからの前記偏位を検出することと、前記偏位を相殺する前記駆動電流を見積もることと、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動することと、を含む、実施態様10に記載の方法。
(18) 前記少なくとも1つのシムコイルを駆動することが、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もることと、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生させることと、を含む、実施態様10に記載の方法。
【特許請求の範囲】
【請求項1】
磁界発生器であって、
基材と、
全てが前記基材上に配置されている主発生器コイル、少なくとも1つの磁界センサ、及び少なくとも1つのシムコイルと、
選択された周波数にて駆動電流を使用して前記主発生器コイルを駆動するよう連結されたドライバー回路と、
前記少なくとも1つの磁界センサから前記選択された周波数にて信号を受信し、並びに定義済みベースラインからの前記信号における偏位に応答して、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するよう連結されている補正回路と、を含む、磁界発生器。
【請求項2】
前記基材が可撓性であり、患者の身体に取付けられるよう構成されている、請求項1に記載の磁界発生器。
【請求項3】
前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、請求項1に記載の磁界発生器。
【請求項4】
前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記補正回路が、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生するように構成されている、請求項1に記載の磁界発生器。
【請求項5】
前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、請求項4に記載の磁界発生器。
【請求項6】
前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、請求項5に記載の磁界発生器。
【請求項7】
前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、請求項6に記載の磁界発生器。
【請求項8】
前記補正回路が、前記定義済みベースラインからの前記偏位を検出し、前記偏位を相殺する前記駆動電流を見積もり、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するように連結されている、請求項1に記載の磁界発生器。
【請求項9】
前記補正回路が、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もるように連結されており、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生するように連結されている、請求項1に記載の磁界発生器。
【請求項10】
基材上に配置されている主発生器コイルを、選択された周波数にて駆動電流を使用して駆動することと、
前記基材上に配置されている少なくとも1つの感知コイルから、前記選択された周波数にて、信号を受信することと、
定義済みベースラインからの前記信号における偏位に応答して、前記基材上に配置されている少なくとも1つのシムコイルを、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、駆動することと、を含む、方法。
【請求項11】
前記基材が可撓性であって、患者の身体に取付けられるよう構成されている、請求項10に記載の方法。
【請求項12】
前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、請求項10に記載の方法。
【請求項13】
前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記少なくとも1つのシムコイルを駆動することが、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生することを含む、請求項10に記載の方法。
【請求項14】
前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、請求項13に記載の方法。
【請求項15】
前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、請求項14に記載の方法。
【請求項16】
前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、請求項15に記載の方法。
【請求項17】
前記少なくとも1つのシムコイルを駆動することが、前記定義済みベースラインからの前記偏位を検出することと、前記偏位を相殺する前記駆動電流を見積もることと、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動することと、を含む、請求項10に記載の方法。
【請求項18】
前記少なくとも1つのシムコイルを駆動することが、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もることと、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生させることと、を含む、請求項10に記載の方法。
【請求項1】
磁界発生器であって、
基材と、
全てが前記基材上に配置されている主発生器コイル、少なくとも1つの磁界センサ、及び少なくとも1つのシムコイルと、
選択された周波数にて駆動電流を使用して前記主発生器コイルを駆動するよう連結されたドライバー回路と、
前記少なくとも1つの磁界センサから前記選択された周波数にて信号を受信し、並びに定義済みベースラインからの前記信号における偏位に応答して、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するよう連結されている補正回路と、を含む、磁界発生器。
【請求項2】
前記基材が可撓性であり、患者の身体に取付けられるよう構成されている、請求項1に記載の磁界発生器。
【請求項3】
前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、請求項1に記載の磁界発生器。
【請求項4】
前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記補正回路が、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生するように構成されている、請求項1に記載の磁界発生器。
【請求項5】
前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、請求項4に記載の磁界発生器。
【請求項6】
前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、請求項5に記載の磁界発生器。
【請求項7】
前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、請求項6に記載の磁界発生器。
【請求項8】
前記補正回路が、前記定義済みベースラインからの前記偏位を検出し、前記偏位を相殺する前記駆動電流を見積もり、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動するように連結されている、請求項1に記載の磁界発生器。
【請求項9】
前記補正回路が、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もるように連結されており、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生するように連結されている、請求項1に記載の磁界発生器。
【請求項10】
基材上に配置されている主発生器コイルを、選択された周波数にて駆動電流を使用して駆動することと、
前記基材上に配置されている少なくとも1つの感知コイルから、前記選択された周波数にて、信号を受信することと、
定義済みベースラインからの前記信号における偏位に応答して、前記基材上に配置されている少なくとも1つのシムコイルを、前記ベースラインに前記信号を戻すよう構成された振幅を有する駆動電流を使用して、駆動することと、を含む、方法。
【請求項11】
前記基材が可撓性であって、患者の身体に取付けられるよう構成されている、請求項10に記載の方法。
【請求項12】
前記基材がプリント基板(PCB)を含み、前記主発生器コイル、前記少なくとも1つの磁界センサ及び前記少なくとも1つのシムコイルが、前記PCB上にプリントされている導電体を含む、請求項10に記載の方法。
【請求項13】
前記少なくとも1つのシムコイルが複数のシムコイルを含み、前記少なくとも1つのシムコイルを駆動することが、前記磁界センサから受信した前記信号に応答して、前記シムコイルを駆動するための複数のそれぞれの駆動電流を発生することを含む、請求項10に記載の方法。
【請求項14】
前記複数のシムコイルが、前記基材上の別々の互いに離れた位置で配置されている、請求項13に記載の方法。
【請求項15】
前記複数のシムコイルが、前記基材の別々のそれぞれの副区域を取り囲む導電体を含む、請求項14に記載の方法。
【請求項16】
前記主コイルが、前記シムコイルの前記副区域を含有する前記基材の区域を取り囲む、請求項15に記載の方法。
【請求項17】
前記少なくとも1つのシムコイルを駆動することが、前記定義済みベースラインからの前記偏位を検出することと、前記偏位を相殺する前記駆動電流を見積もることと、前記見積もられた駆動電流を使用して、前記少なくとも1つのシムコイルを駆動することと、を含む、請求項10に記載の方法。
【請求項18】
前記少なくとも1つのシムコイルを駆動することが、前記偏位が存在しない場合、前記少なくとも1つの磁界センサによって生成された前記信号を測定することによって、前記ベースラインを見積もることと、前記偏位が存在する場合、前記ベースラインを前記少なくとも1つの磁界センサによって生成された前記信号と比較することによって、前記駆動電流を発生させることと、を含む、請求項10に記載の方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−19901(P2013−19901A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−156213(P2012−156213)
【出願日】平成24年7月12日(2012.7.12)
【出願人】(511099630)バイオセンス・ウエブスター・(イスラエル)・リミテッド (50)
【氏名又は名称原語表記】Biosense Webster (Israel), Ltd.
【住所又は居所原語表記】4 Hatnufa Street, Yokneam 20692, Israel
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2012−156213(P2012−156213)
【出願日】平成24年7月12日(2012.7.12)
【出願人】(511099630)バイオセンス・ウエブスター・(イスラエル)・リミテッド (50)
【氏名又は名称原語表記】Biosense Webster (Israel), Ltd.
【住所又は居所原語表記】4 Hatnufa Street, Yokneam 20692, Israel
【Fターム(参考)】
[ Back to top ]