
歪分布計測システムと弾性率分布計測システム及びそれらの方法
【課題】血管内の不安定プラークの内部構造など微細な計測対象物に対して、高い分解能を発揮し得る歪分布計測システムと弾性率分布計測システム及びそれらの方法を提供することである。
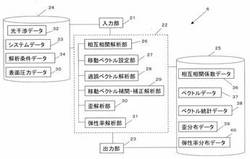
【解決手段】入力部21と、データ格納部24,25と、解析部22と、出力部23を有して、被測定対象3の圧縮前後の測定データ32から歪分布39を解析する歪分布計測システム6であって、解析部は、測定データの所望の評価領域において圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部26と、移動ベクトルを設定する移動ベクトル設定部27と、過誤ベクトル解析部28と、移動ベクトル補間・補正解析部29と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部30とを有するものである。
【解決手段】入力部21と、データ格納部24,25と、解析部22と、出力部23を有して、被測定対象3の圧縮前後の測定データ32から歪分布39を解析する歪分布計測システム6であって、解析部は、測定データの所望の評価領域において圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部26と、移動ベクトルを設定する移動ベクトル設定部27と、過誤ベクトル解析部28と、移動ベクトル補間・補正解析部29と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部30とを有するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定対象の圧縮前後の超音波エコーデータ又は光干渉データから歪分布あるいは弾性率分布を解析する歪分布計測システムに係り、特に高分解能にデータ処理を実行可能な歪分布計測システムと弾性率分布計測システム及びそれらの方法に関する。
【背景技術】
【0002】
物体や生体組織における歪分布あるいは弾性率分布の計測は、その物体や生体組織の構造や構成を知る上で重要な情報となるため、これまでにも多数の研究がなされてきた。
半導体素子等の製造工程において検出が必要な材料内部の構造欠陥や金属材料の熱疲労等に基づく亀裂に対する非破壊検査の分野をはじめ、近年では、特に医療分野においては超音波エコーを用いた画像診断を疾病予防や治療に用いて、効果を上げている。例えば、心筋梗塞などの急性冠症候群は、血管内の不安定プラークが破裂することにより発生する疾患であるが、そのプラークは主に脂質が血管壁に沈着した病変であり、これが血流の抑制や閉塞を引き起こすことから、このプラークの存在を把握するために血管内超音波エコー法を用いた画像診断が実施されている。
【0003】
例えば特許文献1には、「超音波診断システム、歪み分布表示方法及び弾性係数分布表示方法」という名称で、超音波ビームを使用するもので、被検体組織を有限個の直方体要素に分割して3次元有限要素モデル化し、各要素内では、弾性係数、応力、歪は一様であると仮定し、弾性方程式に歪み分布情報を用いて弾性係数分布情報を推定する技術が開示されている。また、その推定の際に、横方向変位に対応して変位分布を推定できるようにすると共に超音波ビーム方向の歪分布のみから弾性係数分布を再構成できるようにするために、相関演算手段は、直交検波手段から出力される包絡線信号を用いて被検体組織の圧縮前後の信号間で相関を計算するが、計算量の低減のために2次元相関窓内の軸方向及びこの軸方向に直交する横方向にそれぞれ所定値ずつ離散した走査線毎に相関係数を計算する技術が開示されている。
【0004】
また、特許文献2には、「超音波を利用した軟組織の粘弾性推定装置およびプログラム」という名称の発明が開示されている。この発明は、移動機構を備えた超音波プローブから発せられる超音波の反射波を受信して、受信データの時間変化から対象物形状の変形量を計算し、体組織などのように皮膚、脂肪、筋、骨などと階層構造をなす軟組織に対しても、階層毎に弾性、粘性、慣性を推定することを可能とする技術である。
【特許文献1】特開2004−57652号公報
【特許文献2】特開2005−144155号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び特許文献2に記載された従来の技術は、超音波を利用するものであり、分解能はせいぜい100μm程度であって、しかも、取得されるデータの処理においてノイズなどランダムな要素に関する処理が不十分であることから、分解能を高くすることが困難で、例えば血管内に形成された不安定プラークなどの分布の把握や小型化が著しい半導体素子の微細構造に関する欠陥の検出には不十分となり、プラークの内部構造及び不安定性や素子の微小な内部欠陥の有無を詳細に判断することは不可能であるという課題があった。
【0006】
本発明はかかる従来の事情に対処してなされたものであり、血管内の不安定プラークや半導体素子部品の内部構造など微細な計測対象物に対して、高い分解能を発揮し得る歪分布計測システムと弾性率分布計測システム及びそれらの方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1記載の発明である歪分布計測システムは、入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の超音波エコーデータ又は光干渉データ(以下、これらを総称して単に測定データという。)から歪分布を解析する歪分布計測システムであって、前記入力部は、前記圧縮前後の測定データを前記データ格納部に入力可能な手段であって、前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部とを有し、前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とするものである。
上記構成の歪分布計測システムでは、相互相関解析部が測定データの位置変化に関する相互相関係数を演算してその相互相関係数が最大となる位置変位の始点と終点を選択し、移動ベクトル設定部でその最も確からしい始点と終点を有する移動ベクトルを定めるという作用を有する。
また、過誤ベクトル解析部は、この相互相関係数を用いて定めた移動ベクトルの中に存在し得る過誤ベクトルを除去するという作用を有し、移動ベクトル補間・補正解析部は、移動ベクトルを補間や補正という処理を施すことで、移動ベクトルの分布を連続化させる作用を有する。
そして、歪分布解析部では連続化された移動ベクトルの空間変化率を演算して歪分布を解析するという作用を有する。
なお、測定データとして、OCT(オプティカル・コヒーレンス・トモグラフィー)光学系を用いて検出された光干渉データを用いる場合には、被測定対象の内部情報(干渉信号)を抽出しており、被測定対象の表面における分布ではなく、その内部の干渉データから内部の歪み量や弾性率などの力学的な空間分布を抽出するという作用を有する。
【0008】
また、請求項2に記載の発明である歪分布計測システムは、請求項1に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とするものである。
上記構成の歪分布計測システムでも、請求項1と同様の作用を有する。
【0009】
請求項3に記載の発明である歪分布計測システムは、請求項1に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とするものである。
上記構成の歪分布計測システムでも、請求項1と同様の作用を有する。
【0010】
さらに、請求項4に記載の発明である歪分布計測システムは、請求項1乃至請求項3のいずれか1項に記載の発明において、前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とするものである。
上記構成の歪分布計測システムでは、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって、評価領域を細分化した上で繰り返し移動ベクトルの設定、過誤ベクトルの除去や移動ベクトルの分布の連続化を実行するという作用を有する。
【0011】
請求項5記載の発明である弾性率分布計測システムは、入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の測定データから弾性率分布を解析する弾性率分布計測システムであって、前記入力部は、前記圧縮前後の測定データと前記被測定対象の表面圧力データを前記データ格納部に入力可能な手段であって、前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部と、前記表面圧力データと前記歪分布解析部において演算された空間変化率を用いて弾性率を演算する弾性率分布解析部とを有し、前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とするものである。
上記構成の弾性率分布計測システムでは、請求項1に記載の歪分布計測システムの作用に加えて、弾性率分布解析部が歪分布解析部で演算された空間変化率と非測定対象の表面圧力データを用いて弾性率を演算するという作用を有する。
【0012】
請求項6記載の発明である弾性率分布計測システムは、請求項5に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とするものである。
上記構成の弾性率分布計測システムでは、請求項5に記載の弾性率分布計測システムと同様の作用を有する。
【0013】
請求項7記載の発明である弾性率分布計測システムは、請求項5に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とするものである。
【0014】
請求項8記載の発明である弾性率分布計測システムは、請求項5乃至請求項7のいずれか1項に記載の発明において、前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とするものである。
上記構成の弾性率分布計測システムでは、請求項4に記載の歪分布計測システムと同様に、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって、評価領域を細分化した上で繰り返し移動ベクトルの設定、過誤ベクトルの除去や移動ベクトルの分布の連続化を実行するという作用を有する。
【0015】
請求項9記載の発明である歪分布計測方法は、コンピュータが各工程を実行しながら被測定対象の圧縮前後の測定データから歪分布を解析する歪分布計測方法において、入力部が前記圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程と、相互相関解析部が前記測定データを前記データ格納部から読み出して所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する工程と、移動ベクトル設定部がこの解析された前記相互相関係数をキーとして最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する工程と、過誤ベクトル解析部が、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する工程と、移動ベクトル補間・補正解析部が前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる工程と、歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程と、出力部が前記移動ベクトルの空間変化率の分布を出力する工程とを有するものである。
上記構成の歪分布計測方法では、請求項1に記載された歪分布計測システムを方法の発明として捉えたものであり、請求項1に記載された歪分布計測システムの作用と同様の作用を有する。
【0016】
請求項10記載の発明である歪分布計測方法は、請求項9に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であるものである。
上記構成の歪分布計測方法では、請求項9に記載の歪分布計測方法と同様の作用を有する。
【0017】
請求項11記載の発明である歪分布計測方法は、請求項9に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であるものである。
上記構成の歪分布計測方法においても、請求項9に記載の歪分布計測方法と同様の作用を有する。
【0018】
請求項12記載の発明である弾性率分布計測方法は、請求項9乃至請求項11のいずれか1項に記載の歪分布計測方法に新たな工程を加えた弾性率分布計測方法であって、前記入力部が圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程は、前記被測定対象の表面圧力データを格納する工程を含み、前記歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程の後に、弾性率分布解析部が前記表面圧力データと前記空間変化率を用いて弾性率を演算する工程を有することを特徴とするものである。
上記構成の弾性率分布計測方法では、請求項5乃至請求項7に記載された弾性率分布計測システムを方法の発明として捉えたものであり、請求項5乃至請求項7に記載された弾性率分布計測システムの作用と同様の作用を有する。
【発明の効果】
【0019】
本発明の請求項1記載の歪分布計測システムでは、測定データの位置変化に関する相互相関係数を演算し位置変位の選択を行なって移動ベクトルを定め、過誤ベクトルの除去を行ない、さらに移動ベクトルの分布を連続化させることで、ランダムな成分を高い確率で排除し、格段に高い精度を備えた歪分布を出力することが可能という効果を有する。
【0020】
また、本発明の請求項2及び請求項3に記載の歪分布計測システムでも請求項1に記載の発明の効果と同様である。
【0021】
本発明の請求項4に記載の歪分布計測システムにおいては、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって評価領域を細分化して繰り返し演算を実行することで、歪分布における精度の向上・分解能の向上をより一層図ることができる。
【0022】
本発明の請求項5に記載の弾性率分布計測システムにおいては、請求項1に記載の発明と同様に、格段に高い精度を備えた弾性率分布を出力することができる。
【0023】
本発明の請求項6及び請求項7に記載の弾性率分布計測システムにおいても請求項5に記載の発明の効果と同様である。
【0024】
本発明の請求項8に記載の弾性率分布計測システムにおいては、請求項4に記載の歪分布計測システムと同様に、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって、評価領域を細分化することで歪分布における精度の向上・分解能の向上をより一層図ることができるという効果を有する。
【0025】
本発明の請求項9乃至請求項11に記載の歪分布計測方法においては、請求項1乃至請求項3に記載の歪分布計測システムと同様の効果を有する。
【0026】
本発明の請求項12に記載の弾性率分布計測方法においては、請求項5に記載の弾性率分布計測システムと同様の効果を有する。
【発明を実施するための最良の形態】
【0027】
以下に、本発明の最良の実施の形態に係る歪分布計測システム及び弾性率分布測定システムさらにはそれらの方法について図1乃至図8に基づき説明する。
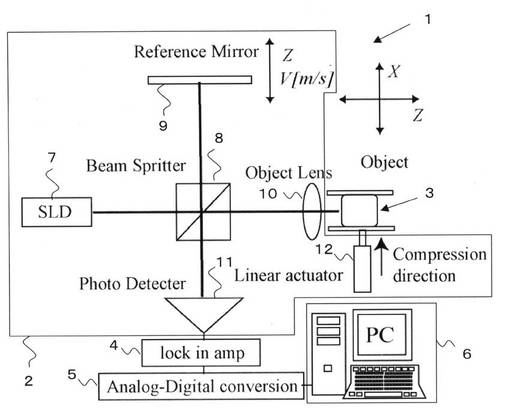
図1は、本発明の本実施の形態に係る弾性率分布計測システムを含み、被測定対象物である生体組織を圧縮して、その前後で得られる光干渉データを取得して生体組織における弾性率分布を計測するための組織弾性画像計測システムの概念図である。本実施の形態においては、測定データとして超音波エコーデータよりも分解能がそれ自体高い光干渉データを用い、また、被測定対象物として生体組織を採用して説明する。
図1において、組織弾性画像計測システム1は、被測定対象物3に対して圧縮力を加える線形駆動器12を備え、また、この被測定対象物3に低コヒーレンス近赤外光を照射するための光源としてスーパールミネッセントダイオード7を備えている。スーパールミネッセントダイオード7から放射される低コヒーレンス近赤外光は、ビームスプリッター8によって対物レンズ10へ進行するものと参照鏡9へ進行するものに分光される。対物レンズ10へ進行した低コヒーレンス近赤外光は、被測定対象物3に照射され、後方散乱光を発する。この後方散乱光は、再度対物レンズ10を透過して、ビームスプリッター8に進行して参照鏡9に進行した低コヒーレンス近赤外光の反射光と合成され、光検出器11によってその光干渉データが検出される。
参照鏡9は、図1中ではVm/sと表現されているが、一定速度で走査されている。この参照鏡9の走査によれば、低コヒーレンス光源は、コヒーレンス長lcに対応する波連を有するため、参照鏡9の光軸方向走査により、奥行き任意位置において後方散乱された波連の干渉信号が得られるのである。
なお、低コヒーレンス光源の発振波長スペクトルがガウス分布である場合、コヒーレンス長lcは、式(1)で表され、奥行き方向の空間分解能が決定される。ここで、λcとΔλは低コヒーレンス光源の光源スペクトルの中心波長と半値全幅である。
【0028】
【数1】

【0029】
この式(1)を基本として、奥行き走査と共に光軸垂直方向に走査することにより断層画像を算出できる。なお、干渉信号は、低コヒーレンス近赤外光のビームの集光領域(被写界深度)において得られ、更にビームスポット径により光軸垂直方向の空間分解能は決定される。
本実施の形態におけるOCT(オプティカル・コヒーレンス・トモグラフィー)光学系による検出は上述したとおり、内部情報(干渉信号)を抽出しており,その内部の干渉信号から、表面だけでなく、内部の「歪み量」や「弾性率」などの力学的な空間分布を抽出しているのである。
光検出器11によって検出された光干渉データは、光検出器11からアンプ4に入力され、さらにA/D変換器5を介してデジタル信号化され、弾性率分布計測システム6bに入力される。
【0030】
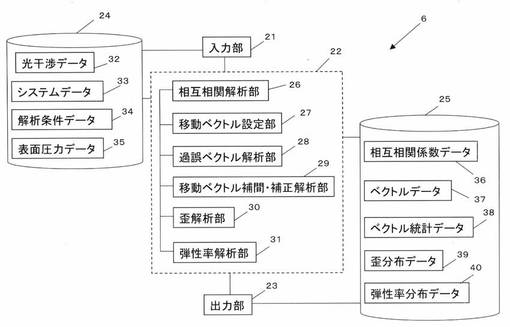
図2に弾性率分布計測システム(歪分布計測システム)のシステム構成図を示す。
図2において、弾性率分布計測システム6bは、図1に示されるA/D変換器5から光干渉データを入力する入力部21を備えている。もちろん、常にA/D変換器5にこの入力部21を接続しておく必要はなく、A/D変換器5によってデジタル化された光干渉データあるいは、アンプ4やA/D変換器5を介さずして取得された生の光干渉データを一旦何らかの媒体に格納しておき、この媒体に入力部21を接続したり、あるいはキーボードなどの入力部21として、生のデータを入力するようにしてもよい。
入力部21から入力された光干渉データ32は、解析入力データベース24に格納されるか、あるいは解析部22に直接入力される。この光干渉データ32は、所望のデータ領域のものを随意に選択して格納してよい。
解析部22は、相互相関解析部26、移動ベクトル設定部27、過誤ベクトル解析部28、移動ベクトル補間・補正解析部29、歪解析部30及び弾性率解析部31から構成される。
また、解析入力データベース24には光干渉データ32の他にも組織弾性画像計測システム1を含めた全般のシステムデータ33が格納されており、例えば、低コヒーレンス光源であるスーパールミネッセントダイオード7の光源スペクトルの光源波長λcやその半値全幅Δλなどがシステムデータ33に該当し、式(1)によってコヒーレンス長lcなども演算可能なようになっている。
その他、解析入力データベース24には解析条件データ34や弾性率解析部31によって演算される弾性率を演算するための表面圧力データ35が格納されている。
解析部22で解析されて得られた出力は、解析出力データベース25に格納され、また、出力部23にも出力される。
解析出力データベース25には、相互相関解析部26によって解析された結果である相互相関係数データ36、移動ベクトル設定部27によって設定される移動ベクトルに関するベクトルデータ37、ベクトルデータ37に対して統計的な処理を施すことで得られる、例えば標準偏差等のベクトル統計データ38、歪解析部30によって解析される歪分布データ39及び弾性率解析部31によって解析される弾性率分布データ40が格納される。
さらに、解析部22で得られた解析結果は出力部23にも出力される。この出力部23は、例えばCRT(陰極線管)や液晶、プラズマディスプレイ、有機EL(エレクトロルミネッセンス)などのディスプレイのみならず、他の装置やシステムにデータを伝送可能なインターフェースなども含むものである。
【0031】
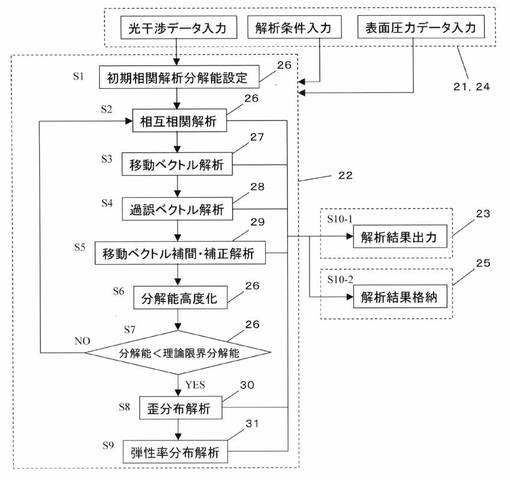
以下、解析部22における解析方法について図3乃至図8も参照しながら説明する。図3は本願発明の実施の形態に係る弾性率分布計測方法(歪分布計測方法)の工程を示すフロー図である。また、それぞれの工程を実行するハードウェアとの関係を明確にするため、図2に開示されたシステム構成図と同じ構成要素には同じ符号を付している。
まず、相互相関解析部26は、図3のステップS1に示されるように初期相関解析分解能を設定する。この設定は自動的に予め解析入力データベース24に解析条件データ34の一部として格納されていた初期相関解析分解能を読み出して設定してもよいし、相互相関解析部26が、出力部23に入力部21からの入力を促すメッセージを表示してシステム利用者による入力部21からの入力を待って、相互相関解析部26が入力部21から読み出すようにしてもよい。
初期相関解析分解能は、後述するステップS6の分解能高度化において説明するが、解析の分解能を徐々に高めるイタレーションを実行することで、より精度の高い解析を実行することが可能であり、その分解能の初期値として当初は低い分解能を予め入力しておくために用いられるものである。
【0032】
次に、相互相関解析部26は、図3ではステップS2に示されるが、入力部21から入力された光干渉データ32を用いて、又は解析入力データベース24から光干渉データ32を読み出す。
この光干渉データ32には、図1に示された被測定対象物3の線形駆動器12による圧縮前後の予め定められた検査領域内におけるスペックル・パターンが含まれており、このスペックル・パターンに対して相互相関を解析することで(ステップS2)、被測定対象物3に対する圧縮前後の変位を求め、これによって移動ベクトルを解析する(ステップS3)。
相互相関解析部26では、ステップS2に示されるとおり、局所的なスペックル・パターンの類似度を式(2)で表される相関値Ri,jを用いて評価するものである。
【0033】
【数2】
【0034】
f(Xi,Zj)とg(Xi,Zj)は、圧縮前後の光干渉データ32で設定される中心位置(i,j)、Mx×Mzピクセルの検査領域におけるスペックル・パターンである。
探査領域(Nx×Nzピクセル)内において、検査領域を平行移動し、各移動量に対し相互相関係数である相関値Ri,j(ΔX,ΔZ)の算出を行なう。ΔX及びΔZは、図1に示されるX軸方向及びZ軸方向におけるそれぞれの移動量である。
その結果、式(3)に示すように、最大相関値を与える移動量Ui,j(Uの上部にはベクトル表記としての矢印が付される)を移動ベクトル設定部27で、ステップS3に示すとおり圧縮前後の移動ベクトルとして決定することができるのである。
【0035】
【数3】
【0036】
式(2)に示されるf(fの上部には平均値の表記としてのバーが付される)とg(gの上部には平均値の表記としてのバーが付される)は、f(Xi,Zj)とg(Xi,Zj)の検査領域内平均値を表し、平均値からの偏差を利用するとともに相関値の規格化を行なっている。
【0037】
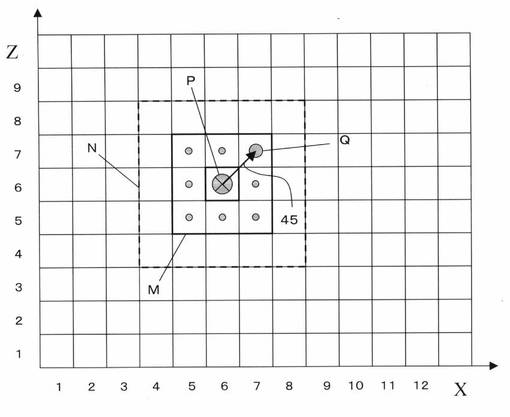
ここで、相関値の解析と移動ベクトルの設定に関する具体的な例として、図4を用いて説明する。
図4は相互相関解析部26において実行される相互相関解析を説明するための概念図である。図4において、縦軸は図1の被測定対象物3近傍に示されるZ方向を示し、横軸は同じくX方向を示している。符号Nが付されて点線で示される領域が探査領域(5×5ピクセル)であり、その中に符号Mが付されて実線で示される領域が検査領域(3×3ピクセル)である。中央に×印を付した符号Pで示される部分が中心位置で、座標は(6,6)で示される。この検査領域を探査領域内で平行移動させると、その移動の仕方は上下左右、斜め右上、左上、右下、左下の8通りあり、それぞれの移動量に対して、相関値を演算することが可能である。この平行移動の始点と終点を被測定対象物3における圧縮前後の変位の始点と終点として捉えるものである。検査領域に含まれる中心位置以外の座標に丸印が付されているが、その大きさが、中心位置が8通りの方向へ平行移動した際に、中心位置におけるスペックル・パターンとそれぞれの位置のスペックル・パターンとで演算された相関値の大きさを意味している。
図4においては、右上に平行移動させて得られたスペックル・パターンの相関値が最も大きいため、中心位置からこの右斜め上方向の符号Qで示される座標に変位があったと考えられ、中心位置(6,6)を始点、右上の座標(7,7)を終点とするように選択することが可能である。
このように相互相関解析部26においては、探査領域内において、検査領域を平行移動させながら、そのスペックル・パターンの相関値を演算するのである。
そして、移動ベクトル設定部27では、相互相関解析部26で得られたその相関値の中で最大値を与える点を、検査領域の中心位置に対する変位の終点として移動ベクトル45を設定するものである。図3では、ステップS3に移動ベクトル解析として示される工程である。
このようにして相互相関解析部26において解析された相関値Ri,jは、解析出力データベース25に相互相関係数データ36として相互相関解析部26によって格納され、さらに、出力部23に出力されるようにしてもよい。
また、移動ベクトル設定部27によって設定された移動ベクトル45に関するベクトルデータ37も、移動ベクトル設定部27によって解析出力データベース25に格納されるが、そのまま解析を行なう場合には、過誤ベクトル解析部28に送信してもよいし、出力部23に出力してもよい。
なお、図4においてはX−Z軸による直交座標系を採用して矩形のメッシュに分割された検査領域、探査領域を概念しているが、特に直交座標系に限定するものではなく、様々な座標系を用いてもよい。
【0038】
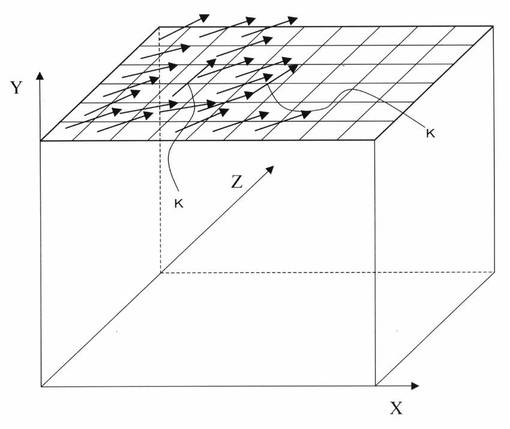
以上のようにしてすべての検査領域の中心位置に関して移動ベクトルを設定し終えると、図5に示されるような移動ベクトルの集合が概念される。図5に示される矢印のそれぞれが、始点と終点を備えた移動ベクトルであり、この終点は、先に説明したとおり相互相関解析部26によって、その始点の周囲に対して相関値を解析した結果、最も相関値が高い座標を終点として選択して設定されているものである。
このようにして設定された移動ベクトル45は、図5に示されるように、すべてが同一方向を向いているとは言えない場合が多く、これは移動ベクトルに過誤ベクトルが含まれていることによるもので、この過誤ベクトルはスペックル・パターンに含まれるノイズやスペックル・パターン自身の情報が少ないことに基づくものである。
図5では、符号Kで示されるような、他の移動ベクトルとは方向が異なる過誤ベクトルと考えられるものが含まれているように見える。
そこで、本願発明においては、この過誤ベクトルを排除するために、解析部22に過誤ベクトル解析部28を設けている。
過誤ベクトル解析部28では、図5に符号Kで示されるような過誤ベクトルを排除するが、詳細には図6に示される構成を備えている。
【0039】
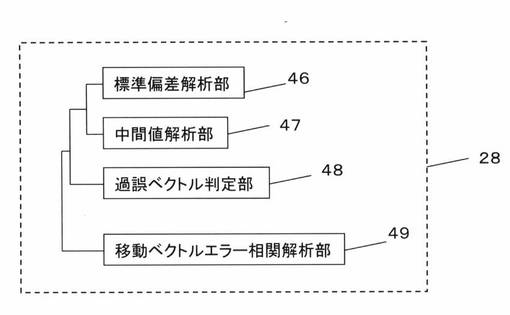
図6は、過誤ベクトル解析部のシステム構成図である。図6において、過誤ベクトルであるか否かを判断するために移動ベクトルを解析する標準偏差解析部46と中間値解析部47を備え、その解析結果に基づいて過誤ベクトルであるか否かを判断してベクトルデータ37から当該過誤ベクトルのデータを排除する過誤ベクトル判定部48と、加えて別個独立に過誤ベクトルを排除する移動ベクトルエラー相関解析部49が設けられている。図3に示すフロー図では、ステップS4として示される工程である。
標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48と、移動ベクトルエラー相関解析部49の解析部は、標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48は1セットで必要であるが、それに移動ベクトルエラー相関解析部49が常に必要ということではなく、標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48の1セットと移動ベクトルエラー相関解析部49のうち、少なくとも1つが備えられればよいものである。また、これら以外のものであっても、複数の移動ベクトルから予め定めた基準から外れる移動ベクトルを過誤ベクトルとして解析し得て、排除可能な解析部であればよく、その解析方法は問わないものである。この予め定めた基準は、解析入力データベース24に解析条件データ34の一部として入力部21を介して入力し格納しておくか、あるいは入力部21から入力されたものを過誤ベクトル解析部28で読み出して用いるとよい。
【0040】
次に、標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48による具体的な解析について説明する。
標準偏差解析部46では、まず、移動ベクトル設定部27で設定された移動ベクトルに関するデータを移動ベクトル設定部27から読み出すか、あるいは解析出力データベース25から解析の対象となるベクトルデータ37を読み出し、先に図4を参照しながら説明した符号Mで示される移動ベクトルの3×3ピクセルの検査領域に存在する9個の移動ベクトルに対して、それぞれの方向(X軸方向及びZ軸方向)の移動量毎に、標準偏差σx,σzを解析し、中間値解析部47では同様にその中間値ΔXm,ΔZmを解析する。解析された標準偏差及び中間値は、それぞれ標準偏差解析部46と中間値解析部47によって、いずれもベクトル統計データ38として解析出力データベース25に格納されたり、出力部23から出力されたりする。
そして、その結果のデータは過誤ベクトル判定部48に送信され、過誤ベクトル判定部48では、式(4)及び式(5)で表現される式のいずれか一方でも満足されない場合には、その移動ベクトルを過誤ベクトルとして判断するものである。
式(4)はX軸方向に対する式であり、式(5)はZ軸方向に対する式である。また、式(4)、(5)に含まれるκは、予め任意に定められた定数であり、この定数も解析入力データベース24に予め入力部21を介して解析条件データ34として格納されるか、入力部21から入力されたものを過誤ベクトル判定部48が読み出して式(4)、(5)に入力して解析するものである。
本実施の形態においては、式(4)、(5)で同一のκを用いているが、それぞれκx、κzとして別個独立の定数として定めたものを用いてもよい。また、本実施の形態においては、3×3ピクセルで実行する場合を説明したが、ピクセル数は適宜増減してもよいことは言うまでもない。
【0041】
【数4】
【0042】
【数5】
【0043】
標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48を用いて、過誤ベクトルとして判定された移動ベクトルに関するデータは、過誤ベクトル判定部48によってベクトルデータ37から削除される。
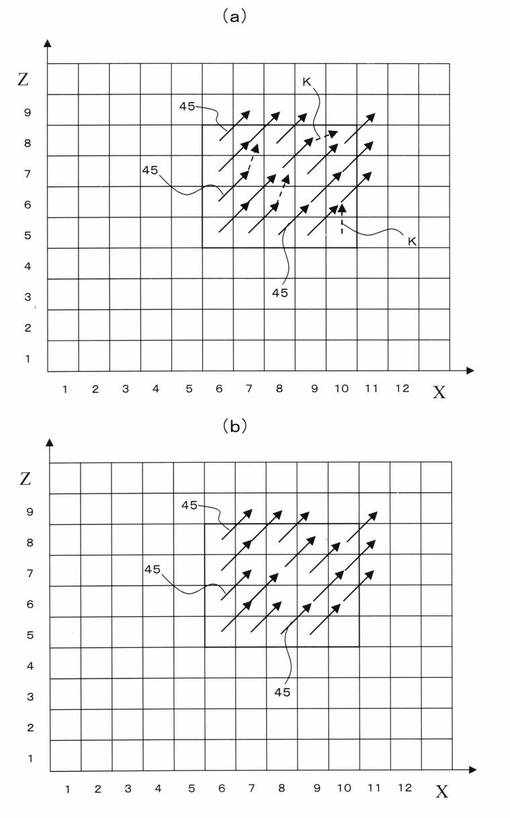
この式(4)及び(5)に示される式によって過誤ベクトルを判断して排除するのが本願発明における第1の統計的処理の具体例の一つとなる。
この様子を表現したものを図7(a),(b)に示す。図7(a)は、符号Kで示される過誤ベクトルと移動ベクトル45が混在している状態を示し、図7(b)は、過誤ベクトルが削除された後に、過誤ベクトルとは判定されなかった移動ベクトル45のみの集合から成るベクトルデータ37が示されている。
【0044】
次に、移動ベクトルエラー相関解析部49による過誤ベクトル排除の具体的な解析について説明する。
標準偏差解析部46と中間値解析部47が、それぞれの移動ベクトル単位でその標準偏差と中間値を解析したのに対し、移動ベクトルエラー相関解析部49では例えば近傍の検査領域における相関値(相互相関係数)の集合(この相関値の集合を本願明細書では相関マップという。)同士でさらに相関を取って過誤ベクトルの原因となっているランダムなスペックル・ノイズを削除するものである。
ある検査領域(組織1)の移動量を演算するために相関マップ1[R1(i,j)]を作成し、そのマップ以内の最大相関値が、前述のとおり、組織1の移動位置を決定して移動ベクトルを形成している。これは、組織1に近い検査領域(組織2)においても同様に行なわれ、相関マップ2[R2(i,j)]を作成して組織2の移動位置を決定して移動ベクトルを形成するものである。
組織1と組織2が重複しているように、非常に近い位置に検査領域が設定されている場合には、両組織、すなわち両検査領域内のスペックル情報は重複していることになり、組織1と組織2によって演算される相関マップ1[R1(i,j)]と相関マップ2[R2(i,j)]も類似したパターンを有することになる。
一方、組織1と組織2のスペックル情報には、多重散乱によるランダム・スペックルがノイズとして必ず混入していることが知られている。このランダム・スペックル・ノイズは相関マップ1と相関マップ2においては相関値のランダム性として現れてくる。このランダム性が強い場合、すなわち、被測定対象物の屈折率分布がランダムに変化している場合、相関マップ1と相関マップ2の類似性を阻害し、移動ベクトルの設定においてノイズとなり、その移動ベクトルのSN比を低下させる主因となってしまう。
そこで、相関マップ1と相関マップ2の掛け算もしくは相関をとる演算を行う。これは相関マップ1と相関マップ2の相関値のランダム性、すなわちランダム・スペックル・ノイズは、掛け算もしくは相関を取ることによって、そのランダム性によってゼロに落ち着くのに対し、相関マップ1と相関マップ2の類似性は高められるという原理に基づくものである。
具体的には、式(6)で示されるS(i,j)を解析して、そのS(i,j)の最大値を求めると、その最大値は、相関マップ1と相関マップ2の類似位置を表すため、これが演算したい組織移動量、すなわち過誤ベクトルを排除した移動ベクトルを示すのである。
このS(i,j)の最大値を得る統計的処理も、本願発明の第1の統計的処理の具体例の一つである。
【0045】
【数6】
【0046】
移動ベクトルエラー相関解析部49を用いた場合には、過誤ベクトルの主因となっていたランダム・スペックル・ノイズ自体が掛け算あるいは相関によってゼロに収れんするため、結局、過誤ベクトル自身が消滅することになり、結果として、過誤ベクトルを含まない移動ベクトル45のみがベクトルデータ37として残ることになる。
過誤ベクトルとして判断された移動ベクトルは、過誤ベクトル解析部28によって解析出力データベース25から読み出されたベクトルデータ37から削除される。
過誤ベクトル解析部28を用いて過誤ベクトルが排除されたベクトルデータ37は、過誤ベクトル解析部28によって解析出力データベース25に新たなベクトルデータ37として格納され、あるいはそのまま直接移動ベクトル補間・補正解析部29に送信されるか出力部23に出力される。
【0047】
次に、図2に示される解析部22の移動ベクトル補間・補正解析部29について説明を行なう。図3では、ステップS5に示される移動ベクトル補間・補正解析工程となる。
この移動ベクトル補間・補正解析部29では、新たなベクトルデータ37では過誤ベクトルが排除されており、移動ベクトル45が所々抜けていることから、これを補うための処理を行う。
求める歪分布は、移動ベクトル45の空間微係数であることから、抜けが生じていると計測誤差が増大してしまうからである。
移動ベクトル補間・補正解析部29では、まず、解析出力データベース25から新たなベクトルデータ37を読み出し、あるいは過誤ベクトル解析部28から送信された新たなベクトルデータ37を読み出して、このベクトルデータ37に含まれる移動ベクトル45に対して、局所的に統計的手法のひとつである最小2乗法を適用し、ベクトル分布に連続性を付加する補間及び補正処理を行うものである。
【0048】
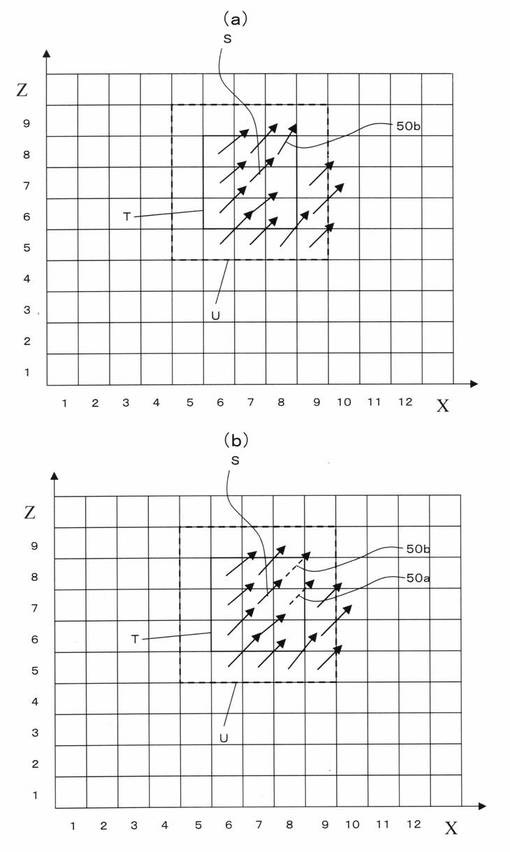
具体的には図8(a),(b)を参照しながら説明する。
図8(a)において示されるように、符号Sで示される移動ベクトルを中心に、符号Uで示される周囲24近傍に対して2次多項式近似を行い、符号Tで示される周囲8近傍の移動ベクトルの補間及び補正処理を行なうものである。補間処理とは、過誤ベクトルとして、概念されるセル(領域)に移動ベクトルが欠落している場合に、2次多項式近似等の統計的処理によって生成される移動ベクトルを加えて、ベクトルデータ37にその移動ベクトルを追加する処理を意味し、補正処理とは、過誤ベクトルではない移動ベクトルが概念されるセル(領域)に存在している場合に、2次多項式近似等の統計的処理によって生成される移動ベクトルに置き換えて、ベクトルデータ37をその置き換えられた移動ベクトルに更新する処理を意味している。
2次多項式近似の対象となる物理量は、ベクトルデータ37に含まれるが、ベクトルの始点と終点の座標から得られるベクトルの大きさと方向に係る量である。
補間範囲は50%オーバーラップさせており、その重複部においてはベクトル量の平均値を修正移動ベクトルとしている。
【0049】
図8(b)は、この移動ベクトル補間・補正解析部29による移動ベクトル補間・補正を終了した後の新たなベクトルデータ37を示す概念図である。
図8(b)において、移動ベクトル50aは元々過誤ベクトルとして削除されていて欠けていた移動ベクトルが2次多項式近似によって補間処理された移動ベクトルであり、移動ベクトル50bは、図8(a)において示されるように元々は移動ベクトルとして存在していたものの、その方向が少し他の移動ベクトルと異なっているものであったものが、2次多項式近似によって補正処理されて図8(b)に示されるような移動ベクトルとなったものである。
なお、本実施の形態においては、本願発明の第2の統計的処理の具体例として、最小2乗法を用いて2次多項式近似による補間、補正処理を示したが、もちろん、この方法によらずとも移動ベクトルの補間、補正処理が可能であれば、例えば2次より高次の多項式近似やスプライン補間など、統計的手法であればどのような方法を用いてもよい。
【0050】
補間処理、補正処理して得られた移動ベクトルに関するデータは、移動ベクトル補間・補正解析部29によって、新たなベクトルデータ37として解析出力データベース25に格納されるか、あるいは出力部23に出力されてもよい。また、近似式に関するデータは移動ベクトル補間・補正解析部29によって、解析出力データベース25のベクトル統計データ38として格納されるようにしておくとよい。
【0051】
次に、図2に示される歪解析部30について説明する。図3では、ステップS6及びステップS7が示されるが、まず、分解能を高度化させない状況でステップS8とステップS9に示される歪分布解析と弾性率分布解析を行なうフローについて説明を行なう。
歪解析部30では、式(7)に示される修正された移動ベクトルの空間変化率として歪を定義して、歪分布を求めるものである。式(7)において、εxi,jはX軸方向の歪を表し、その分子は隣り合うセルの移動ベクトルのX軸成分の差分を表している。同様に、εzi,jはZ軸方向の歪を表し、その分子は隣り合うセルの移動ベクトルのZ軸成分の差分を表している。ΔXmaxi,j、ΔZmaxi,jなどは、式(3)に示される最大相関値を与えるX軸における移動量ΔXやZ軸における移動量ΔZを示している。
各セルの移動ベクトルについて歪を求めることで、全体として歪分布を解析することが可能となる。
【0052】
【数7】
【0053】
なお、ΔLx、ΔLzは、空間分解能を表す。図5に示されるような正方メッシュに区切られたX−Z平面上のセルで考えると、そのセルの長さをΔLとすれば、これが空間分解能となり、式(7)に当てはめれば、ΔL=ΔLx=ΔLzとなる。
また、式(1)で示されるコヒーレンス長lcに基づく空間分解能は、理論的にこれ以上高められない理論限界分解能を表しており、式(7)のΔLは、移動ベクトルを考える際に区切られた例えば正方のメッシュの大きさによって得られる空間分解能ということができる。従って、このメッシュを小さくしてくことで、空間分解能は高められるものの、コヒーレンス長lc以下に小さなメッシュを考慮しても空間分解能はそれ以上高度にはなり得ないものである。
歪解析部30によって得られた歪解析結果に関するデータは、歪解析部30によって、解析出力データベース25に示される歪分布データ39として格納される。また、引き続き弾性率解析部31によって弾性率分布を解析する場合には弾性率解析部31へ送信され、また、出力部23に出力されるようにしてもよい。
なお、本実施の形態においては、式(7)で示す修正された移動ベクトルの空間変化率として歪を定義して演算し歪分布を求めたが、式(7)に示されるような定義の他にも、前段(ステップS5)で、移動ベクトル補間・補正解析部29によって実行された補間処理、補正処理に際して得られた内挿関数(例えば高次方程式やスプライン関数等)の微分係数によっても定義が可能であり、これらを用いてもよい。すなわち、それらの内挿関数を予め歪解析部30に格納しておくか解析入力データベース24に解析条件データ34として格納しておいて、歪解析部30によって読み出すか、あるいは移動ベクトル補間・補正解析部29で得られた内挿関数をそのまま移動ベクトル補間・補正解析部29から歪解析部30が読み出すようにしてもよい。
【0054】
次に、図2に示される弾性率解析部31について説明する。図3ではステップS9として示される工程となる。
弾性率解析部31は、弾性率が応力を歪で除することで得られることから、歪解析部30で得られた歪分布データ39を用いて、弾性率分布データ40を解析するものである。
応力に関するデータは、予め解析入力データベース24に表面圧力データ35として格納しておく。この表面圧力データ35は、被測定対象物3の表面における応力を測定したもので、その応力値には分布がなく一様であるという前提に基づいて得られたデータである。ただし、もちろん、一様ではなく何らかの応力分布として応力値が定量的に得られる場合には、そのデータを用いてもよい。すなわち、別の系で測定された応力分布データや別の系で解析された応力分布の解析データをそれぞれ解析入力データベース24に表面圧力データ35として格納させておいてもよいし、解析の途中で入力部21を介して入力して、弾性率解析部31によって読み出してもよい。
弾性率解析部31は、まず、解析出力データベース25から歪分布データ39を読み出して、あるいは歪解析部30から直接歪分布データ39を読み出して、さらに解析入力データベース24から表面圧力データ35を読み出す。
そして、図5で概念されるようなセル(領域)毎に、表面圧力データ35を歪分布データ39で除する演算を実行することで、それぞれのセルにおける弾性率を演算する。これらはまとめて弾性率分布データ40となり、弾性率解析部31によって、解析出力データベース25に格納される。また、出力部23に出力されてもよい。
【0055】
さらに、ここで図3に示されるステップS6の分解能高度化及びステップS7の解析結果の分解能と理論限界分解能を比較してイタレーションを実行する工程について説明を追加する。
本願発明の重要な特徴の一つとして、このイタレーション機能がある。図3において、ステップS1で示されるように初期相関解析分解能を設定しておき、このステップS6及びステップS7の工程によって、その分解能を高度化してさらにステップS3乃至ステップS5の工程に係る解析を実行し、徐々に解析の分解能を上げていくことで、誤差の少ない高い精度を備えた歪分布解析あるいは弾性率分布解析を可能とするものである。
まず、初期相関解析分解能は、先に説明したとおり、相互相関解析部26によって設定される。その予め定められる初期相関解析分解能は、式(7)に示される検査領域のセルの長さとして与えられるものである。
この初期相関解析分解能を用いて、解析して、ステップS5まで実行されると、次に、相互相関解析部26は、この初期相関解析分解能を高める(小さくする)。このように、相互相関解析部26では解析前に解析入力データベース24に格納された解析条件データ34に含まれるイタレーション情報について読み出しておくか、あるいは解析の途中で、出力部23にイタレーションを実行するか否かの問合せを本システムの使用者に行なうような表示を示して、入力部21から入力されるイタレーション情報を読み出すようにするとよい。
解析分解能を高める具体方法としては、予め定められた一定の分解能を差し引いて新たな分解能として設定してもよいし、初期相関解析分解能の例えば90%や50%などとして設定してもよい。ただ、本実施の形態では、検査領域を1/4に分割して、すなわち式(7)におけるΔLを半分にしてイタレーションを開始する次のステージへと進むこととしている。
次ステージでは、分解能が高められたので検査領域や探査領域におけるセルの1辺(ΔL)は小さくなっているが、ここで解析に供されるデータは、前ステージで過誤ベクトル解析部28や移動ベクトル補間・補正解析部29によって新たに得られたベクトルデータ37である。
【0056】
この新たなベクトルデータ37を参照しながら、再度、分解能が高まって細かくなったセルにおける移動ベクトルに対して、再度相互相関解析部26を用いて相互相関を取り、移動ベクトル設定部27を用いて細かなセルで移動ベクトルを設定し、過誤ベクトル解析部28で過誤ベクトルを排除し、移動ベクトル補間・補正解析部29で移動ベクトルの補間・補正を実行するものである。
すなわち、相互相関解析部26、移動ベクトル設定部27、過誤ベクトル解析部28、移動ベクトル補間・補正解析部29はそれぞれイタレーション機能を備えている。ここで、イタレーション機能を備えているというのは、それぞれの解析部や設定部が分解能を向上させて繰り返し解析が可能な機能を備えているという意味であり、このイタレーション機能を発揮させるように解析を行なうための選択を指示するのは、本実施の形態では相互相関解析部26ということになる。
但し、このイタレーション機能の発揮の選択については、特に相互相関解析部26に限定されるものではなく、他の解析部、例えば歪解析部30や弾性率解析部31であってもよい。
次ステージにおいて、これらの解析部、設定部で得られるデータは、前ステージと同様に、それぞれ相互相関係数データ36、ベクトルデータ37、ベクトル統計データ38として解析出力データベース25に格納されたり、次の解析部等に送信されたり、あるいは出力部23に出力される。また、これらの次ステージのデータは、前ステージのデータにオーバーライトされてもよいし、次ステージの別データとして新たに格納されてもよい。
次ステージで得られたベクトルデータ37を用いて、さらに歪解析部30及び弾性率解析部31では前述と同様に歪分布を解析し、弾性率分布を解析する。
次に、次ステージにおける分解能よりもさらに分解能を高める。本実施の形態では、後で実施例として示すとおり、検査領域をさらに1/4としてΔLをさらに半分とする。
但し、このようにして求められた空間分解能が、いずれは式(1)に示されるコヒーレンス波長lcよりも小さくなってしまう。この場合は、理論的な限界の分解能を越えることになるので、解析は終了する。これを表現したのが、図3のステップS7である。このステップS7に示される理論限界分解能とは、式(1)に示されるコヒーレンス波長lcである。これ以上、セルを細かく分割しても空間分解能は向上することがないため、分解能を高度化する処理を終了するのである。なお、本実施の形態においては、分解能としてΔLやコヒーレンス波長lcなど小さくなるほど分解能が向上するものを選択したので、図3のステップS7のように不等号が示されるが、他の指標をもって分解能として表現した場合に、その指標が大きくなるほど分解能が向上するものであれば、ステップS7の不等号は逆になる。
また、図3ではステップS6、ステップS7を経てステップS8及びステップS9を処理するような工程となっているが、常に、ステップS7からステップS2へ向かうイタレーションを実行する必要はなく、ステップS5からステップS8、9へ進んでもよいし、ステップS6,7を含む場合でも、毎回ステップS8,9を実行してから、ステップS7からステップS2へ向かうイタレーションを実行してもよいことは言うまでもない。
さらに、ステップS10−1とステップS10−2として、それぞれ解析結果出力工程と解析結果格納工程が示されているが、これもステップS9の後に行なわれる工程というよりも便宜的に工程の符号が付されるものであり、各工程によって解析された結果については、前述のとおり適宜出力部23に出力されたり、解析出力データベース25に格納されたりすることになる。
【0057】
以上、弾性率分布計測システム6b及び弾性率分布計測方法の実施の形態として説明したが、この弾性率分布計測システム6bにおいて、弾性率解析部31と解析入力データベース24に格納される表面圧力データ35を備えないものとして歪分布計測システム6aが概念され、それ以外は共通にこれまで説明した構成要素を含み、それぞれ同様の作用及び効果を発揮するものである。もちろん、歪分布計測システム6aでは、弾性率解析部31がないので、弾性率分布データ40は解析されることはなく、解析出力データベース25にも格納されず、出力部23に出力されることもない。
また、図3を参照しながら弾性率分布計測方法及び歪分布計測方法の実施の形態について説明したが、歪分布計測システム6aと弾性率分布計測システム6bの関係と同様に、歪分布計測方法においては、図3におけるステップS9が存在せず、また入力部21に記載されている表面圧力データ入力の工程がないものの、それ以外の工程は弾性率分布計測方法と共通に存在している。
【0058】
以上のようにして得られた歪分布や弾性率分布は、心筋梗塞などの急性冠症候群に対する治療において、血管内の不安定プラークの存在等を高精度で検出可能とするものである。特に、弾性率分布を得ることで、血管と不安定プラークとでは弾性率が異なることから不安定プラークの存在を明確化することが可能であり、また生体組織構造を可視化することも可能である。もちろん、血管以外の生体組織にも応用することは可能であり多様な利用が考えられる。
また、超音波よりも分解能を高くすることが可能な近赤外光などの光源を用いて光干渉に関するデータを測定することによれば、本実施の形態における測定データの処理に関する高い分解能の効果と相まって、より精度の高い歪分布あるいは弾性率分布を得ることが可能となる。
このような歪分布計測システムや弾性率分布計測システム、あるいは歪分布計測方法及び弾性率分布計測方法により、医学分野では、循環系の疾患の早期発見はもとより、疾患の診断、治療の効果の定量的な把握、治癒確認など医療現場で様々な用途に用いることが可能となるし、工学分野では、前述のように非破壊検査等において、より精度の高い診断や検査を実施することが可能となる。
なお、本実施の形態においては、光干渉データを用いた場合について説明したが、冒頭に述べたとおり、光源の代わりに超音波源を用いて、超音波エコー信号を測定することによっても同様に歪分布計測システムや弾性率分布システムとしては成立する。また、超音波エコーを測定する場合には、図1に示されるOCT光学系2に代えて、超音波エコー系を用いる必要があるが、これは現在用いられているような通常のものを設置すれば足りるので、本願では特に説明を省略する。
以下、本実施の形態に係る具体的な実施例として実験を行なったので、その結果について説明する。
【実施例】
【0059】
実験は、図1、2で示される構成で行われた。本実験も光干渉データを取得する場合のものとして実施しているが、超音波エコーデータを取得する場合もOCT光学系に代えて超音波エコー系を採用することによれば同様である。
光源のスーパールミネッセントダイオード7としては、中心波長λc=831nm、半値全幅Δλ=55nmのスーパールミネッセントダイオードを用いた。式(1)のコヒーレンス波長lcの理論値は5.54μmであるが、スペクトル形状を考慮するとサイドローブの影響から、光軸方向(Z方向)の空間分解能は10μm程度と考えられる。
非球面モールドガラスレンズ(N.A.=0.4,f=6.25mm)を対物レンズ10として用い、被測定対象物3に集光照射した。
ビームスポット径6.61μmが光軸垂直方向(X方向)の空間分解能となるため、4μmおきにX方向の走査を行なった。図1に示すシステムでは、参照鏡9を一定速度(Vm/s)にて走査することにより、干渉信号のドップラーシフト周波数成分(fD=2ν/λc)をアンプ4を用いて増幅し、光干渉データを得た。
被写界深度は330μmとなり、この領域においてコヒーレンスゲートが掛かり、光干渉データが得られる。被測定対象物3である試料を圧縮するために線形駆動器12を設置し、光軸垂直方向に均一試料は50μm、不均一試料は20μm圧縮し、圧縮前後の光コヒーレンス断層画像(光干渉データ)を得た。
なお、試料は一辺1cm程度と小さいため、線形駆動器12は試料端面全体を一様に圧縮しているとみなすことができる。
光コヒーレンス断層画像の範囲は、X×Z=1200×1200μmであり、4μmを1ピクセルとして画像化(X×Z=300×300ピクセル)した。実験試料はagar粉末1g(弾性率:3.92〜4.90kPa)を熱湯60mlに溶解し微少ポリスチレン粒子(粒子径1μm)を混入した物を均一試料とした。
これに外径275μmの釣糸(弾性率:1.47〜2.45GPa)を混入させたものを不均一試料として圧縮実験を行なった。
【0060】
図9(a)に均一試料の光コヒーレンス断層画像を示した。画像中の白い斑点は混入されたポリスチレン粒子によるスペックル・パターンである。図10 に、本手法により得られた移動ベクトルを各ステージ毎に示す。なお、第1ステージにおける検査領域と探査領域の大きさはMx=Mz=320μm、Nx=Nz=400μmと設定した。
図10(a)乃至(c)より明らかなように、第1ステージからステージを上げるごとに、イタレーションによる再帰的相関処理によって移動ベクトルが高分解能化している。最高分解能を有する最終ステージは、光コヒーレンス断層画像の空間分解能と検査領域内におけるスペックル・パターンの情報量によって決定される。本実施例における実験ではスペックル・パターン粒子像が約10μmであり、光コヒーレンス断層画像の空間分解能も10μm程度と考えられるため、ΔL=20μmの空間分解能を有する第4ステージを最終ステージとした。これを図11に示す。各ステージの移動ベクトル分布から、圧縮方向(X方向) に一様に移動していることが確認できる。図12に第4ステージにおけるX方向の移動量分布を示す。X 方向の平均移動量は18.26μmであり、同ステージでのZ方向の平均移動量は0.22μmであった。Z方向の平均移動量は光コヒーレンス断層画像の分解能以下であることから、圧縮方向にのみ移動していることが確認できる。図12に示すように、X方向移動量に関する近似直線から算出した移動量変化率は−0.68%であり、圧縮方向に移動量が減少していることを20μmの高分解能で検出している。ここで、均一試料端面を一様圧縮したと仮定した場合、試料幅の計測値を用いると圧縮方向の変化率は−0.43%と算出できる。両変化率には0.25%の誤差が発生しているが、計測領域1200μmにおける誤差距離に換算した場合3.0μmとなり、光軸垂直方向の分解能6.61μm以下である。
さらに、X方向およびZ方向の移動量に関するばらつき誤差は±1.10μm、±1.00μmであり、各方向の分解能を考慮すると誤差範囲内であることがわかる。この結果、均一試料に対して一様圧縮の仮定に基づく結果と一致すると考えられ、本願発明による手法の妥当性が検証された。従来法との比較のため、サブピクセル処理を導入した直接相互相関法を、同一空間分解能において適用した。
【0061】
図13と図14に、従来法による移動ベクトル分布およびX方向移動量分布を示す。なお、探査領域の大きさ(Nx=Nz)は誤差を最小にする条件に設定している。X方向の移動量の減衰は、本願発明による手法と同様の結果を示している。しかし、X方向とZ方向に対する移動量のばらつき誤差は、それぞれ±7.81μm、±4.66μmと各方向の分解能より大きいため、高分解能の移動ベクトル分布を従来法を用いて算出することは困難である。図13から確認できるように、これは過誤ベクトルによる影響と考えられる。しかし、本発明の手法は過誤ベクトルの発生を抑制するとともに、その発生が少ない大きな検査領域から移動方向を限定し再帰的に相関処理を行うため、高空間分解能の移動ベクトル分布を算出することが可能である。本願発明の手法と従来法の移動ベクトル分布から算出したX方向の歪み分布を、図15と図16に示す。本手法は一様な歪みが確認できるが、従来法は局所的な歪みが発生していることが目視できる。均一試料端面を一様圧縮したと仮定し算出した歪み量を基準に、本計測結果の平均2乗誤差は2.12%であり、従来法による結果は45.88%であった。この両者を比較した場合、95.4%の歪み量誤差の低減を実現している。Z方向の歪み量についても、91.6%の誤差低減が可能であった。歪み量は空間微分量であるため、従来法では誤差を増大させてしまうが、本発明の手法では過誤ベクトル除去後に最小2乗法によって空間補間および補正処理を行うため、空間微分量の連続性が向上している。
【0062】
図9(b)は不均一試料の画像である。(X,Z)=(500μm,600μm)を中心とする楕円状の黒い部分が弾性率の異なる釣糸を表し、ポリスチレン
粒子によるスペックル・パターンと共に画像化されている。本発明の手法を適用した第4ステージ(ΔL=20μm)における移動ベクトル分布および歪み分布を、図17と図18に示す。図中における斜線部は釣糸部を表している。移動ベクトル分布は圧縮方向(X方向)に一様移動しておらず、釣糸周辺において歪曲した大きな移動ベクトルが確認できる。均一Agar粉末試料に対して高弾性係数を有する釣糸部の周辺では、圧縮により大きな変形が発生したことが理解できる。図15と図18を比較すると、不均一試料の歪み分布に関しては、変形の激しい(X,Z)=(300μm,300μm)と(X,Z)=(300μm,800μm)の付近において、局所的に大きな歪みが発生していることが確認できる。一様圧縮の仮定の下では、圧縮方向における釣り糸周辺部において歪みが発生することが予測できるが、図9(b)よりAgar粉末と釣り糸の境界部において剥離が観察できることから、本実験では一様圧縮の理想的な条件とは異なるため、比較検討することは困難であると考える。しかし、弾性率の異なる不均一試料において現れる特徴的な組織変形を観察可能であることが検証された。
【0063】
前述した均一試料における場合と同様に、同一空間分解能において従来法を適用し比較検討を行った。その結果を図19と図20に示す。両図から明らかなように、過誤ベクトルの多発によって局所的な歪みが斑状に現れている。高空間分解能による直接相互相関法は、検査領域内の情報量減少に伴う相関ピークの多発が過誤ベクトル発生を増加させる。それに加え、不均一試料においては回転を伴う複雑な移動現象が発生しているため、従来法では移動ベクトルの同定が不可能であると考えられる。しかし、本願発明における手法では、再帰的なスペックル相互相関法と最小2乗法などの統計的手法による空間補間処理の組み合わせにより、複雑な移動現象も高空間分解能で追跡が可能である。
これらの結果から、線維性被膜、脂質コア、石灰質などの弾性率の異なる組織が介在する不安定プラークにおいて、その力学特性を高空間分解能で検出できる可能性が明らかとなり、本願発明の作用及び効果が実証されるに至った。
【産業上の利用可能性】
【0064】
以上説明したように、本発明の請求項1乃至請求項12に記載された発明は、循環系の疾患の早期発見のための健康診断用の装置やシステムとして利用可能であり、さらに、疾患の診断用装置・システム、治療の効果の定量的な把握、治癒確認のための装置やシステムなどあらゆる医療現場で用いることが可能である。
また、人間のみならず、動物などを取り扱う獣医院などでの利用が可能である。
さらに、動植物の生体組織のみならず、非破壊検査用の装置への応用なども考えられる。
【図面の簡単な説明】
【0065】
【図1】本発明の本実施の形態に係る弾性率分布計測システムを含み、被測定対象物である生体組織を圧縮して、その前後で得られる光干渉データを取得して生体組織における弾性率分布を計測するための組織弾性画像計測システムの概念図である。
【図2】本実施の形態に係る弾性率分布計測システム(歪分布計測システム)のシステム構成図である。
【図3】本願発明の実施の形態に係る弾性率分布計測方法(歪分布計測方法)の工程を示すフロー図である。
【図4】相互相関解析部26において実行される相互相関解析を説明するための概念図である。
【図5】移動ベクトルの概念図である。
【図6】過誤ベクトル解析部のシステム構成図である。
【図7】(a)及び(b)は、過誤ベクトル解析部で実行される、あるいはステップS4で実行される過誤ベクトルの排除を説明するための概念図である。
【図8】(a)及び(b)は、移動ベクトル補間・補正解析部で実行される、あるいはステップS5として実行されるベクトル分布の補間・補正処理を説明するための概念図である。
【図9】実施例の欄で説明した実験によって得られた光コヒーレンス断層画像であり、(a)は均一試料において得られた画像であり、(b)は不均一試料において得られた画像である。
【図10】実施例の欄で説明した実験によって得られた移動ベクトルの画像であり、(a)はΔL=160μmの空間分解能を有するもの、(b)はΔL=80μmの空間分解能を有するもの、(c)はΔL=40μmの空間分解能を有するものである。
【図11】実施例の欄で説明した実験によって得られた移動ベクトルの画像であり、最終ステージとして設定された第4ステージにおけるもので、ΔL=20μmの空間分解能を有するものである。
【図12】第4ステージの移動ベクトル分布から演算されるX方向の移動量分布を示すグラフである。
【図13】従来法によって得られた移動ベクトル分布を示す画像である。
【図14】従来法によって得られた移動ベクトル分布から演算されたX方向移動量分布を示すグラフである。
【図15】本願発明の手法によって得られた移動ベクトル分布から演算されたX方向の歪分布である。
【図16】従来法によって得られた移動ベクトル分布から演算されたX方向の歪分布である。
【図17】本願発明の手法を適用して得られた第4ステージ(ΔL=20μm)における移動ベクトル分布である。
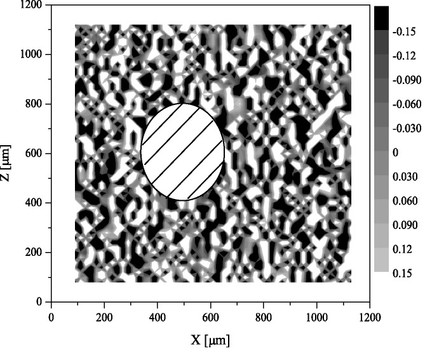
【図18】本願発明の手法を適用して得られた第4ステージ(ΔL=20μm)における歪分布である。
【図19】従来法によって不均一試料を用いて同一空間分解能(ΔL=20μm)において得られた移動ベクトル分布である。
【図20】従来法によって不均一試料を用いて同一空間分解能(ΔL=20μm)において得られた歪分布である。
【符号の説明】
【0066】
1…組織弾性画像計測システム 2…OCT光学系 3…被測定対象物 4…アンプ 5…A/D変換器 6a…歪分布計測システム 6b…弾性率分布計測システム 7…スーパールミネッセントダイオード 8…ビームスプリッター 9…参照鏡 10…対物レンズ 11…光検出器 12…線形駆動器 21…入力部 22…解析部 23…出力部 24…解析入力データベース 25…解析出力データベース 26…相互相関解析部 27…移動ベクトル設定部 28…過誤ベクトル解析部 29…移動ベクトル補間・補正解析部 30…歪解析部 31…弾性率解析部 32…光干渉データ 33…システムデータ 34…解析条件データ 35…表面圧力データ 36…相互相関係数データ 37…ベクトルデータ 38…ベクトル統計データ 39…歪分布データ 40…弾性率分布データ 45…移動ベクトル 46…標準偏差解析部 47…中間値解析部 48…過誤ベクトル判定部 49…移動ベクトルエラー相関解析部 50a,50b…移動ベクトル
【技術分野】
【0001】
本発明は、被測定対象の圧縮前後の超音波エコーデータ又は光干渉データから歪分布あるいは弾性率分布を解析する歪分布計測システムに係り、特に高分解能にデータ処理を実行可能な歪分布計測システムと弾性率分布計測システム及びそれらの方法に関する。
【背景技術】
【0002】
物体や生体組織における歪分布あるいは弾性率分布の計測は、その物体や生体組織の構造や構成を知る上で重要な情報となるため、これまでにも多数の研究がなされてきた。
半導体素子等の製造工程において検出が必要な材料内部の構造欠陥や金属材料の熱疲労等に基づく亀裂に対する非破壊検査の分野をはじめ、近年では、特に医療分野においては超音波エコーを用いた画像診断を疾病予防や治療に用いて、効果を上げている。例えば、心筋梗塞などの急性冠症候群は、血管内の不安定プラークが破裂することにより発生する疾患であるが、そのプラークは主に脂質が血管壁に沈着した病変であり、これが血流の抑制や閉塞を引き起こすことから、このプラークの存在を把握するために血管内超音波エコー法を用いた画像診断が実施されている。
【0003】
例えば特許文献1には、「超音波診断システム、歪み分布表示方法及び弾性係数分布表示方法」という名称で、超音波ビームを使用するもので、被検体組織を有限個の直方体要素に分割して3次元有限要素モデル化し、各要素内では、弾性係数、応力、歪は一様であると仮定し、弾性方程式に歪み分布情報を用いて弾性係数分布情報を推定する技術が開示されている。また、その推定の際に、横方向変位に対応して変位分布を推定できるようにすると共に超音波ビーム方向の歪分布のみから弾性係数分布を再構成できるようにするために、相関演算手段は、直交検波手段から出力される包絡線信号を用いて被検体組織の圧縮前後の信号間で相関を計算するが、計算量の低減のために2次元相関窓内の軸方向及びこの軸方向に直交する横方向にそれぞれ所定値ずつ離散した走査線毎に相関係数を計算する技術が開示されている。
【0004】
また、特許文献2には、「超音波を利用した軟組織の粘弾性推定装置およびプログラム」という名称の発明が開示されている。この発明は、移動機構を備えた超音波プローブから発せられる超音波の反射波を受信して、受信データの時間変化から対象物形状の変形量を計算し、体組織などのように皮膚、脂肪、筋、骨などと階層構造をなす軟組織に対しても、階層毎に弾性、粘性、慣性を推定することを可能とする技術である。
【特許文献1】特開2004−57652号公報
【特許文献2】特開2005−144155号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び特許文献2に記載された従来の技術は、超音波を利用するものであり、分解能はせいぜい100μm程度であって、しかも、取得されるデータの処理においてノイズなどランダムな要素に関する処理が不十分であることから、分解能を高くすることが困難で、例えば血管内に形成された不安定プラークなどの分布の把握や小型化が著しい半導体素子の微細構造に関する欠陥の検出には不十分となり、プラークの内部構造及び不安定性や素子の微小な内部欠陥の有無を詳細に判断することは不可能であるという課題があった。
【0006】
本発明はかかる従来の事情に対処してなされたものであり、血管内の不安定プラークや半導体素子部品の内部構造など微細な計測対象物に対して、高い分解能を発揮し得る歪分布計測システムと弾性率分布計測システム及びそれらの方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1記載の発明である歪分布計測システムは、入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の超音波エコーデータ又は光干渉データ(以下、これらを総称して単に測定データという。)から歪分布を解析する歪分布計測システムであって、前記入力部は、前記圧縮前後の測定データを前記データ格納部に入力可能な手段であって、前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部とを有し、前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とするものである。
上記構成の歪分布計測システムでは、相互相関解析部が測定データの位置変化に関する相互相関係数を演算してその相互相関係数が最大となる位置変位の始点と終点を選択し、移動ベクトル設定部でその最も確からしい始点と終点を有する移動ベクトルを定めるという作用を有する。
また、過誤ベクトル解析部は、この相互相関係数を用いて定めた移動ベクトルの中に存在し得る過誤ベクトルを除去するという作用を有し、移動ベクトル補間・補正解析部は、移動ベクトルを補間や補正という処理を施すことで、移動ベクトルの分布を連続化させる作用を有する。
そして、歪分布解析部では連続化された移動ベクトルの空間変化率を演算して歪分布を解析するという作用を有する。
なお、測定データとして、OCT(オプティカル・コヒーレンス・トモグラフィー)光学系を用いて検出された光干渉データを用いる場合には、被測定対象の内部情報(干渉信号)を抽出しており、被測定対象の表面における分布ではなく、その内部の干渉データから内部の歪み量や弾性率などの力学的な空間分布を抽出するという作用を有する。
【0008】
また、請求項2に記載の発明である歪分布計測システムは、請求項1に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とするものである。
上記構成の歪分布計測システムでも、請求項1と同様の作用を有する。
【0009】
請求項3に記載の発明である歪分布計測システムは、請求項1に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とするものである。
上記構成の歪分布計測システムでも、請求項1と同様の作用を有する。
【0010】
さらに、請求項4に記載の発明である歪分布計測システムは、請求項1乃至請求項3のいずれか1項に記載の発明において、前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とするものである。
上記構成の歪分布計測システムでは、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって、評価領域を細分化した上で繰り返し移動ベクトルの設定、過誤ベクトルの除去や移動ベクトルの分布の連続化を実行するという作用を有する。
【0011】
請求項5記載の発明である弾性率分布計測システムは、入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の測定データから弾性率分布を解析する弾性率分布計測システムであって、前記入力部は、前記圧縮前後の測定データと前記被測定対象の表面圧力データを前記データ格納部に入力可能な手段であって、前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部と、前記表面圧力データと前記歪分布解析部において演算された空間変化率を用いて弾性率を演算する弾性率分布解析部とを有し、前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とするものである。
上記構成の弾性率分布計測システムでは、請求項1に記載の歪分布計測システムの作用に加えて、弾性率分布解析部が歪分布解析部で演算された空間変化率と非測定対象の表面圧力データを用いて弾性率を演算するという作用を有する。
【0012】
請求項6記載の発明である弾性率分布計測システムは、請求項5に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とするものである。
上記構成の弾性率分布計測システムでは、請求項5に記載の弾性率分布計測システムと同様の作用を有する。
【0013】
請求項7記載の発明である弾性率分布計測システムは、請求項5に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とするものである。
【0014】
請求項8記載の発明である弾性率分布計測システムは、請求項5乃至請求項7のいずれか1項に記載の発明において、前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とするものである。
上記構成の弾性率分布計測システムでは、請求項4に記載の歪分布計測システムと同様に、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって、評価領域を細分化した上で繰り返し移動ベクトルの設定、過誤ベクトルの除去や移動ベクトルの分布の連続化を実行するという作用を有する。
【0015】
請求項9記載の発明である歪分布計測方法は、コンピュータが各工程を実行しながら被測定対象の圧縮前後の測定データから歪分布を解析する歪分布計測方法において、入力部が前記圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程と、相互相関解析部が前記測定データを前記データ格納部から読み出して所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する工程と、移動ベクトル設定部がこの解析された前記相互相関係数をキーとして最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する工程と、過誤ベクトル解析部が、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する工程と、移動ベクトル補間・補正解析部が前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる工程と、歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程と、出力部が前記移動ベクトルの空間変化率の分布を出力する工程とを有するものである。
上記構成の歪分布計測方法では、請求項1に記載された歪分布計測システムを方法の発明として捉えたものであり、請求項1に記載された歪分布計測システムの作用と同様の作用を有する。
【0016】
請求項10記載の発明である歪分布計測方法は、請求項9に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であるものである。
上記構成の歪分布計測方法では、請求項9に記載の歪分布計測方法と同様の作用を有する。
【0017】
請求項11記載の発明である歪分布計測方法は、請求項9に記載の発明において、前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であるものである。
上記構成の歪分布計測方法においても、請求項9に記載の歪分布計測方法と同様の作用を有する。
【0018】
請求項12記載の発明である弾性率分布計測方法は、請求項9乃至請求項11のいずれか1項に記載の歪分布計測方法に新たな工程を加えた弾性率分布計測方法であって、前記入力部が圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程は、前記被測定対象の表面圧力データを格納する工程を含み、前記歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程の後に、弾性率分布解析部が前記表面圧力データと前記空間変化率を用いて弾性率を演算する工程を有することを特徴とするものである。
上記構成の弾性率分布計測方法では、請求項5乃至請求項7に記載された弾性率分布計測システムを方法の発明として捉えたものであり、請求項5乃至請求項7に記載された弾性率分布計測システムの作用と同様の作用を有する。
【発明の効果】
【0019】
本発明の請求項1記載の歪分布計測システムでは、測定データの位置変化に関する相互相関係数を演算し位置変位の選択を行なって移動ベクトルを定め、過誤ベクトルの除去を行ない、さらに移動ベクトルの分布を連続化させることで、ランダムな成分を高い確率で排除し、格段に高い精度を備えた歪分布を出力することが可能という効果を有する。
【0020】
また、本発明の請求項2及び請求項3に記載の歪分布計測システムでも請求項1に記載の発明の効果と同様である。
【0021】
本発明の請求項4に記載の歪分布計測システムにおいては、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって評価領域を細分化して繰り返し演算を実行することで、歪分布における精度の向上・分解能の向上をより一層図ることができる。
【0022】
本発明の請求項5に記載の弾性率分布計測システムにおいては、請求項1に記載の発明と同様に、格段に高い精度を備えた弾性率分布を出力することができる。
【0023】
本発明の請求項6及び請求項7に記載の弾性率分布計測システムにおいても請求項5に記載の発明の効果と同様である。
【0024】
本発明の請求項8に記載の弾性率分布計測システムにおいては、請求項4に記載の歪分布計測システムと同様に、相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び移動ベクトル補間・補正解析部のイタレーション機能によって、評価領域を細分化することで歪分布における精度の向上・分解能の向上をより一層図ることができるという効果を有する。
【0025】
本発明の請求項9乃至請求項11に記載の歪分布計測方法においては、請求項1乃至請求項3に記載の歪分布計測システムと同様の効果を有する。
【0026】
本発明の請求項12に記載の弾性率分布計測方法においては、請求項5に記載の弾性率分布計測システムと同様の効果を有する。
【発明を実施するための最良の形態】
【0027】
以下に、本発明の最良の実施の形態に係る歪分布計測システム及び弾性率分布測定システムさらにはそれらの方法について図1乃至図8に基づき説明する。
図1は、本発明の本実施の形態に係る弾性率分布計測システムを含み、被測定対象物である生体組織を圧縮して、その前後で得られる光干渉データを取得して生体組織における弾性率分布を計測するための組織弾性画像計測システムの概念図である。本実施の形態においては、測定データとして超音波エコーデータよりも分解能がそれ自体高い光干渉データを用い、また、被測定対象物として生体組織を採用して説明する。
図1において、組織弾性画像計測システム1は、被測定対象物3に対して圧縮力を加える線形駆動器12を備え、また、この被測定対象物3に低コヒーレンス近赤外光を照射するための光源としてスーパールミネッセントダイオード7を備えている。スーパールミネッセントダイオード7から放射される低コヒーレンス近赤外光は、ビームスプリッター8によって対物レンズ10へ進行するものと参照鏡9へ進行するものに分光される。対物レンズ10へ進行した低コヒーレンス近赤外光は、被測定対象物3に照射され、後方散乱光を発する。この後方散乱光は、再度対物レンズ10を透過して、ビームスプリッター8に進行して参照鏡9に進行した低コヒーレンス近赤外光の反射光と合成され、光検出器11によってその光干渉データが検出される。
参照鏡9は、図1中ではVm/sと表現されているが、一定速度で走査されている。この参照鏡9の走査によれば、低コヒーレンス光源は、コヒーレンス長lcに対応する波連を有するため、参照鏡9の光軸方向走査により、奥行き任意位置において後方散乱された波連の干渉信号が得られるのである。
なお、低コヒーレンス光源の発振波長スペクトルがガウス分布である場合、コヒーレンス長lcは、式(1)で表され、奥行き方向の空間分解能が決定される。ここで、λcとΔλは低コヒーレンス光源の光源スペクトルの中心波長と半値全幅である。
【0028】
【数1】
【0029】
この式(1)を基本として、奥行き走査と共に光軸垂直方向に走査することにより断層画像を算出できる。なお、干渉信号は、低コヒーレンス近赤外光のビームの集光領域(被写界深度)において得られ、更にビームスポット径により光軸垂直方向の空間分解能は決定される。
本実施の形態におけるOCT(オプティカル・コヒーレンス・トモグラフィー)光学系による検出は上述したとおり、内部情報(干渉信号)を抽出しており,その内部の干渉信号から、表面だけでなく、内部の「歪み量」や「弾性率」などの力学的な空間分布を抽出しているのである。
光検出器11によって検出された光干渉データは、光検出器11からアンプ4に入力され、さらにA/D変換器5を介してデジタル信号化され、弾性率分布計測システム6bに入力される。
【0030】
図2に弾性率分布計測システム(歪分布計測システム)のシステム構成図を示す。
図2において、弾性率分布計測システム6bは、図1に示されるA/D変換器5から光干渉データを入力する入力部21を備えている。もちろん、常にA/D変換器5にこの入力部21を接続しておく必要はなく、A/D変換器5によってデジタル化された光干渉データあるいは、アンプ4やA/D変換器5を介さずして取得された生の光干渉データを一旦何らかの媒体に格納しておき、この媒体に入力部21を接続したり、あるいはキーボードなどの入力部21として、生のデータを入力するようにしてもよい。
入力部21から入力された光干渉データ32は、解析入力データベース24に格納されるか、あるいは解析部22に直接入力される。この光干渉データ32は、所望のデータ領域のものを随意に選択して格納してよい。
解析部22は、相互相関解析部26、移動ベクトル設定部27、過誤ベクトル解析部28、移動ベクトル補間・補正解析部29、歪解析部30及び弾性率解析部31から構成される。
また、解析入力データベース24には光干渉データ32の他にも組織弾性画像計測システム1を含めた全般のシステムデータ33が格納されており、例えば、低コヒーレンス光源であるスーパールミネッセントダイオード7の光源スペクトルの光源波長λcやその半値全幅Δλなどがシステムデータ33に該当し、式(1)によってコヒーレンス長lcなども演算可能なようになっている。
その他、解析入力データベース24には解析条件データ34や弾性率解析部31によって演算される弾性率を演算するための表面圧力データ35が格納されている。
解析部22で解析されて得られた出力は、解析出力データベース25に格納され、また、出力部23にも出力される。
解析出力データベース25には、相互相関解析部26によって解析された結果である相互相関係数データ36、移動ベクトル設定部27によって設定される移動ベクトルに関するベクトルデータ37、ベクトルデータ37に対して統計的な処理を施すことで得られる、例えば標準偏差等のベクトル統計データ38、歪解析部30によって解析される歪分布データ39及び弾性率解析部31によって解析される弾性率分布データ40が格納される。
さらに、解析部22で得られた解析結果は出力部23にも出力される。この出力部23は、例えばCRT(陰極線管)や液晶、プラズマディスプレイ、有機EL(エレクトロルミネッセンス)などのディスプレイのみならず、他の装置やシステムにデータを伝送可能なインターフェースなども含むものである。
【0031】
以下、解析部22における解析方法について図3乃至図8も参照しながら説明する。図3は本願発明の実施の形態に係る弾性率分布計測方法(歪分布計測方法)の工程を示すフロー図である。また、それぞれの工程を実行するハードウェアとの関係を明確にするため、図2に開示されたシステム構成図と同じ構成要素には同じ符号を付している。
まず、相互相関解析部26は、図3のステップS1に示されるように初期相関解析分解能を設定する。この設定は自動的に予め解析入力データベース24に解析条件データ34の一部として格納されていた初期相関解析分解能を読み出して設定してもよいし、相互相関解析部26が、出力部23に入力部21からの入力を促すメッセージを表示してシステム利用者による入力部21からの入力を待って、相互相関解析部26が入力部21から読み出すようにしてもよい。
初期相関解析分解能は、後述するステップS6の分解能高度化において説明するが、解析の分解能を徐々に高めるイタレーションを実行することで、より精度の高い解析を実行することが可能であり、その分解能の初期値として当初は低い分解能を予め入力しておくために用いられるものである。
【0032】
次に、相互相関解析部26は、図3ではステップS2に示されるが、入力部21から入力された光干渉データ32を用いて、又は解析入力データベース24から光干渉データ32を読み出す。
この光干渉データ32には、図1に示された被測定対象物3の線形駆動器12による圧縮前後の予め定められた検査領域内におけるスペックル・パターンが含まれており、このスペックル・パターンに対して相互相関を解析することで(ステップS2)、被測定対象物3に対する圧縮前後の変位を求め、これによって移動ベクトルを解析する(ステップS3)。
相互相関解析部26では、ステップS2に示されるとおり、局所的なスペックル・パターンの類似度を式(2)で表される相関値Ri,jを用いて評価するものである。
【0033】
【数2】
【0034】
f(Xi,Zj)とg(Xi,Zj)は、圧縮前後の光干渉データ32で設定される中心位置(i,j)、Mx×Mzピクセルの検査領域におけるスペックル・パターンである。
探査領域(Nx×Nzピクセル)内において、検査領域を平行移動し、各移動量に対し相互相関係数である相関値Ri,j(ΔX,ΔZ)の算出を行なう。ΔX及びΔZは、図1に示されるX軸方向及びZ軸方向におけるそれぞれの移動量である。
その結果、式(3)に示すように、最大相関値を与える移動量Ui,j(Uの上部にはベクトル表記としての矢印が付される)を移動ベクトル設定部27で、ステップS3に示すとおり圧縮前後の移動ベクトルとして決定することができるのである。
【0035】
【数3】
【0036】
式(2)に示されるf(fの上部には平均値の表記としてのバーが付される)とg(gの上部には平均値の表記としてのバーが付される)は、f(Xi,Zj)とg(Xi,Zj)の検査領域内平均値を表し、平均値からの偏差を利用するとともに相関値の規格化を行なっている。
【0037】
ここで、相関値の解析と移動ベクトルの設定に関する具体的な例として、図4を用いて説明する。
図4は相互相関解析部26において実行される相互相関解析を説明するための概念図である。図4において、縦軸は図1の被測定対象物3近傍に示されるZ方向を示し、横軸は同じくX方向を示している。符号Nが付されて点線で示される領域が探査領域(5×5ピクセル)であり、その中に符号Mが付されて実線で示される領域が検査領域(3×3ピクセル)である。中央に×印を付した符号Pで示される部分が中心位置で、座標は(6,6)で示される。この検査領域を探査領域内で平行移動させると、その移動の仕方は上下左右、斜め右上、左上、右下、左下の8通りあり、それぞれの移動量に対して、相関値を演算することが可能である。この平行移動の始点と終点を被測定対象物3における圧縮前後の変位の始点と終点として捉えるものである。検査領域に含まれる中心位置以外の座標に丸印が付されているが、その大きさが、中心位置が8通りの方向へ平行移動した際に、中心位置におけるスペックル・パターンとそれぞれの位置のスペックル・パターンとで演算された相関値の大きさを意味している。
図4においては、右上に平行移動させて得られたスペックル・パターンの相関値が最も大きいため、中心位置からこの右斜め上方向の符号Qで示される座標に変位があったと考えられ、中心位置(6,6)を始点、右上の座標(7,7)を終点とするように選択することが可能である。
このように相互相関解析部26においては、探査領域内において、検査領域を平行移動させながら、そのスペックル・パターンの相関値を演算するのである。
そして、移動ベクトル設定部27では、相互相関解析部26で得られたその相関値の中で最大値を与える点を、検査領域の中心位置に対する変位の終点として移動ベクトル45を設定するものである。図3では、ステップS3に移動ベクトル解析として示される工程である。
このようにして相互相関解析部26において解析された相関値Ri,jは、解析出力データベース25に相互相関係数データ36として相互相関解析部26によって格納され、さらに、出力部23に出力されるようにしてもよい。
また、移動ベクトル設定部27によって設定された移動ベクトル45に関するベクトルデータ37も、移動ベクトル設定部27によって解析出力データベース25に格納されるが、そのまま解析を行なう場合には、過誤ベクトル解析部28に送信してもよいし、出力部23に出力してもよい。
なお、図4においてはX−Z軸による直交座標系を採用して矩形のメッシュに分割された検査領域、探査領域を概念しているが、特に直交座標系に限定するものではなく、様々な座標系を用いてもよい。
【0038】
以上のようにしてすべての検査領域の中心位置に関して移動ベクトルを設定し終えると、図5に示されるような移動ベクトルの集合が概念される。図5に示される矢印のそれぞれが、始点と終点を備えた移動ベクトルであり、この終点は、先に説明したとおり相互相関解析部26によって、その始点の周囲に対して相関値を解析した結果、最も相関値が高い座標を終点として選択して設定されているものである。
このようにして設定された移動ベクトル45は、図5に示されるように、すべてが同一方向を向いているとは言えない場合が多く、これは移動ベクトルに過誤ベクトルが含まれていることによるもので、この過誤ベクトルはスペックル・パターンに含まれるノイズやスペックル・パターン自身の情報が少ないことに基づくものである。
図5では、符号Kで示されるような、他の移動ベクトルとは方向が異なる過誤ベクトルと考えられるものが含まれているように見える。
そこで、本願発明においては、この過誤ベクトルを排除するために、解析部22に過誤ベクトル解析部28を設けている。
過誤ベクトル解析部28では、図5に符号Kで示されるような過誤ベクトルを排除するが、詳細には図6に示される構成を備えている。
【0039】
図6は、過誤ベクトル解析部のシステム構成図である。図6において、過誤ベクトルであるか否かを判断するために移動ベクトルを解析する標準偏差解析部46と中間値解析部47を備え、その解析結果に基づいて過誤ベクトルであるか否かを判断してベクトルデータ37から当該過誤ベクトルのデータを排除する過誤ベクトル判定部48と、加えて別個独立に過誤ベクトルを排除する移動ベクトルエラー相関解析部49が設けられている。図3に示すフロー図では、ステップS4として示される工程である。
標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48と、移動ベクトルエラー相関解析部49の解析部は、標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48は1セットで必要であるが、それに移動ベクトルエラー相関解析部49が常に必要ということではなく、標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48の1セットと移動ベクトルエラー相関解析部49のうち、少なくとも1つが備えられればよいものである。また、これら以外のものであっても、複数の移動ベクトルから予め定めた基準から外れる移動ベクトルを過誤ベクトルとして解析し得て、排除可能な解析部であればよく、その解析方法は問わないものである。この予め定めた基準は、解析入力データベース24に解析条件データ34の一部として入力部21を介して入力し格納しておくか、あるいは入力部21から入力されたものを過誤ベクトル解析部28で読み出して用いるとよい。
【0040】
次に、標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48による具体的な解析について説明する。
標準偏差解析部46では、まず、移動ベクトル設定部27で設定された移動ベクトルに関するデータを移動ベクトル設定部27から読み出すか、あるいは解析出力データベース25から解析の対象となるベクトルデータ37を読み出し、先に図4を参照しながら説明した符号Mで示される移動ベクトルの3×3ピクセルの検査領域に存在する9個の移動ベクトルに対して、それぞれの方向(X軸方向及びZ軸方向)の移動量毎に、標準偏差σx,σzを解析し、中間値解析部47では同様にその中間値ΔXm,ΔZmを解析する。解析された標準偏差及び中間値は、それぞれ標準偏差解析部46と中間値解析部47によって、いずれもベクトル統計データ38として解析出力データベース25に格納されたり、出力部23から出力されたりする。
そして、その結果のデータは過誤ベクトル判定部48に送信され、過誤ベクトル判定部48では、式(4)及び式(5)で表現される式のいずれか一方でも満足されない場合には、その移動ベクトルを過誤ベクトルとして判断するものである。
式(4)はX軸方向に対する式であり、式(5)はZ軸方向に対する式である。また、式(4)、(5)に含まれるκは、予め任意に定められた定数であり、この定数も解析入力データベース24に予め入力部21を介して解析条件データ34として格納されるか、入力部21から入力されたものを過誤ベクトル判定部48が読み出して式(4)、(5)に入力して解析するものである。
本実施の形態においては、式(4)、(5)で同一のκを用いているが、それぞれκx、κzとして別個独立の定数として定めたものを用いてもよい。また、本実施の形態においては、3×3ピクセルで実行する場合を説明したが、ピクセル数は適宜増減してもよいことは言うまでもない。
【0041】
【数4】
【0042】
【数5】
【0043】
標準偏差解析部46、中間値解析部47及び過誤ベクトル判定部48を用いて、過誤ベクトルとして判定された移動ベクトルに関するデータは、過誤ベクトル判定部48によってベクトルデータ37から削除される。
この式(4)及び(5)に示される式によって過誤ベクトルを判断して排除するのが本願発明における第1の統計的処理の具体例の一つとなる。
この様子を表現したものを図7(a),(b)に示す。図7(a)は、符号Kで示される過誤ベクトルと移動ベクトル45が混在している状態を示し、図7(b)は、過誤ベクトルが削除された後に、過誤ベクトルとは判定されなかった移動ベクトル45のみの集合から成るベクトルデータ37が示されている。
【0044】
次に、移動ベクトルエラー相関解析部49による過誤ベクトル排除の具体的な解析について説明する。
標準偏差解析部46と中間値解析部47が、それぞれの移動ベクトル単位でその標準偏差と中間値を解析したのに対し、移動ベクトルエラー相関解析部49では例えば近傍の検査領域における相関値(相互相関係数)の集合(この相関値の集合を本願明細書では相関マップという。)同士でさらに相関を取って過誤ベクトルの原因となっているランダムなスペックル・ノイズを削除するものである。
ある検査領域(組織1)の移動量を演算するために相関マップ1[R1(i,j)]を作成し、そのマップ以内の最大相関値が、前述のとおり、組織1の移動位置を決定して移動ベクトルを形成している。これは、組織1に近い検査領域(組織2)においても同様に行なわれ、相関マップ2[R2(i,j)]を作成して組織2の移動位置を決定して移動ベクトルを形成するものである。
組織1と組織2が重複しているように、非常に近い位置に検査領域が設定されている場合には、両組織、すなわち両検査領域内のスペックル情報は重複していることになり、組織1と組織2によって演算される相関マップ1[R1(i,j)]と相関マップ2[R2(i,j)]も類似したパターンを有することになる。
一方、組織1と組織2のスペックル情報には、多重散乱によるランダム・スペックルがノイズとして必ず混入していることが知られている。このランダム・スペックル・ノイズは相関マップ1と相関マップ2においては相関値のランダム性として現れてくる。このランダム性が強い場合、すなわち、被測定対象物の屈折率分布がランダムに変化している場合、相関マップ1と相関マップ2の類似性を阻害し、移動ベクトルの設定においてノイズとなり、その移動ベクトルのSN比を低下させる主因となってしまう。
そこで、相関マップ1と相関マップ2の掛け算もしくは相関をとる演算を行う。これは相関マップ1と相関マップ2の相関値のランダム性、すなわちランダム・スペックル・ノイズは、掛け算もしくは相関を取ることによって、そのランダム性によってゼロに落ち着くのに対し、相関マップ1と相関マップ2の類似性は高められるという原理に基づくものである。
具体的には、式(6)で示されるS(i,j)を解析して、そのS(i,j)の最大値を求めると、その最大値は、相関マップ1と相関マップ2の類似位置を表すため、これが演算したい組織移動量、すなわち過誤ベクトルを排除した移動ベクトルを示すのである。
このS(i,j)の最大値を得る統計的処理も、本願発明の第1の統計的処理の具体例の一つである。
【0045】
【数6】
【0046】
移動ベクトルエラー相関解析部49を用いた場合には、過誤ベクトルの主因となっていたランダム・スペックル・ノイズ自体が掛け算あるいは相関によってゼロに収れんするため、結局、過誤ベクトル自身が消滅することになり、結果として、過誤ベクトルを含まない移動ベクトル45のみがベクトルデータ37として残ることになる。
過誤ベクトルとして判断された移動ベクトルは、過誤ベクトル解析部28によって解析出力データベース25から読み出されたベクトルデータ37から削除される。
過誤ベクトル解析部28を用いて過誤ベクトルが排除されたベクトルデータ37は、過誤ベクトル解析部28によって解析出力データベース25に新たなベクトルデータ37として格納され、あるいはそのまま直接移動ベクトル補間・補正解析部29に送信されるか出力部23に出力される。
【0047】
次に、図2に示される解析部22の移動ベクトル補間・補正解析部29について説明を行なう。図3では、ステップS5に示される移動ベクトル補間・補正解析工程となる。
この移動ベクトル補間・補正解析部29では、新たなベクトルデータ37では過誤ベクトルが排除されており、移動ベクトル45が所々抜けていることから、これを補うための処理を行う。
求める歪分布は、移動ベクトル45の空間微係数であることから、抜けが生じていると計測誤差が増大してしまうからである。
移動ベクトル補間・補正解析部29では、まず、解析出力データベース25から新たなベクトルデータ37を読み出し、あるいは過誤ベクトル解析部28から送信された新たなベクトルデータ37を読み出して、このベクトルデータ37に含まれる移動ベクトル45に対して、局所的に統計的手法のひとつである最小2乗法を適用し、ベクトル分布に連続性を付加する補間及び補正処理を行うものである。
【0048】
具体的には図8(a),(b)を参照しながら説明する。
図8(a)において示されるように、符号Sで示される移動ベクトルを中心に、符号Uで示される周囲24近傍に対して2次多項式近似を行い、符号Tで示される周囲8近傍の移動ベクトルの補間及び補正処理を行なうものである。補間処理とは、過誤ベクトルとして、概念されるセル(領域)に移動ベクトルが欠落している場合に、2次多項式近似等の統計的処理によって生成される移動ベクトルを加えて、ベクトルデータ37にその移動ベクトルを追加する処理を意味し、補正処理とは、過誤ベクトルではない移動ベクトルが概念されるセル(領域)に存在している場合に、2次多項式近似等の統計的処理によって生成される移動ベクトルに置き換えて、ベクトルデータ37をその置き換えられた移動ベクトルに更新する処理を意味している。
2次多項式近似の対象となる物理量は、ベクトルデータ37に含まれるが、ベクトルの始点と終点の座標から得られるベクトルの大きさと方向に係る量である。
補間範囲は50%オーバーラップさせており、その重複部においてはベクトル量の平均値を修正移動ベクトルとしている。
【0049】
図8(b)は、この移動ベクトル補間・補正解析部29による移動ベクトル補間・補正を終了した後の新たなベクトルデータ37を示す概念図である。
図8(b)において、移動ベクトル50aは元々過誤ベクトルとして削除されていて欠けていた移動ベクトルが2次多項式近似によって補間処理された移動ベクトルであり、移動ベクトル50bは、図8(a)において示されるように元々は移動ベクトルとして存在していたものの、その方向が少し他の移動ベクトルと異なっているものであったものが、2次多項式近似によって補正処理されて図8(b)に示されるような移動ベクトルとなったものである。
なお、本実施の形態においては、本願発明の第2の統計的処理の具体例として、最小2乗法を用いて2次多項式近似による補間、補正処理を示したが、もちろん、この方法によらずとも移動ベクトルの補間、補正処理が可能であれば、例えば2次より高次の多項式近似やスプライン補間など、統計的手法であればどのような方法を用いてもよい。
【0050】
補間処理、補正処理して得られた移動ベクトルに関するデータは、移動ベクトル補間・補正解析部29によって、新たなベクトルデータ37として解析出力データベース25に格納されるか、あるいは出力部23に出力されてもよい。また、近似式に関するデータは移動ベクトル補間・補正解析部29によって、解析出力データベース25のベクトル統計データ38として格納されるようにしておくとよい。
【0051】
次に、図2に示される歪解析部30について説明する。図3では、ステップS6及びステップS7が示されるが、まず、分解能を高度化させない状況でステップS8とステップS9に示される歪分布解析と弾性率分布解析を行なうフローについて説明を行なう。
歪解析部30では、式(7)に示される修正された移動ベクトルの空間変化率として歪を定義して、歪分布を求めるものである。式(7)において、εxi,jはX軸方向の歪を表し、その分子は隣り合うセルの移動ベクトルのX軸成分の差分を表している。同様に、εzi,jはZ軸方向の歪を表し、その分子は隣り合うセルの移動ベクトルのZ軸成分の差分を表している。ΔXmaxi,j、ΔZmaxi,jなどは、式(3)に示される最大相関値を与えるX軸における移動量ΔXやZ軸における移動量ΔZを示している。
各セルの移動ベクトルについて歪を求めることで、全体として歪分布を解析することが可能となる。
【0052】
【数7】
【0053】
なお、ΔLx、ΔLzは、空間分解能を表す。図5に示されるような正方メッシュに区切られたX−Z平面上のセルで考えると、そのセルの長さをΔLとすれば、これが空間分解能となり、式(7)に当てはめれば、ΔL=ΔLx=ΔLzとなる。
また、式(1)で示されるコヒーレンス長lcに基づく空間分解能は、理論的にこれ以上高められない理論限界分解能を表しており、式(7)のΔLは、移動ベクトルを考える際に区切られた例えば正方のメッシュの大きさによって得られる空間分解能ということができる。従って、このメッシュを小さくしてくことで、空間分解能は高められるものの、コヒーレンス長lc以下に小さなメッシュを考慮しても空間分解能はそれ以上高度にはなり得ないものである。
歪解析部30によって得られた歪解析結果に関するデータは、歪解析部30によって、解析出力データベース25に示される歪分布データ39として格納される。また、引き続き弾性率解析部31によって弾性率分布を解析する場合には弾性率解析部31へ送信され、また、出力部23に出力されるようにしてもよい。
なお、本実施の形態においては、式(7)で示す修正された移動ベクトルの空間変化率として歪を定義して演算し歪分布を求めたが、式(7)に示されるような定義の他にも、前段(ステップS5)で、移動ベクトル補間・補正解析部29によって実行された補間処理、補正処理に際して得られた内挿関数(例えば高次方程式やスプライン関数等)の微分係数によっても定義が可能であり、これらを用いてもよい。すなわち、それらの内挿関数を予め歪解析部30に格納しておくか解析入力データベース24に解析条件データ34として格納しておいて、歪解析部30によって読み出すか、あるいは移動ベクトル補間・補正解析部29で得られた内挿関数をそのまま移動ベクトル補間・補正解析部29から歪解析部30が読み出すようにしてもよい。
【0054】
次に、図2に示される弾性率解析部31について説明する。図3ではステップS9として示される工程となる。
弾性率解析部31は、弾性率が応力を歪で除することで得られることから、歪解析部30で得られた歪分布データ39を用いて、弾性率分布データ40を解析するものである。
応力に関するデータは、予め解析入力データベース24に表面圧力データ35として格納しておく。この表面圧力データ35は、被測定対象物3の表面における応力を測定したもので、その応力値には分布がなく一様であるという前提に基づいて得られたデータである。ただし、もちろん、一様ではなく何らかの応力分布として応力値が定量的に得られる場合には、そのデータを用いてもよい。すなわち、別の系で測定された応力分布データや別の系で解析された応力分布の解析データをそれぞれ解析入力データベース24に表面圧力データ35として格納させておいてもよいし、解析の途中で入力部21を介して入力して、弾性率解析部31によって読み出してもよい。
弾性率解析部31は、まず、解析出力データベース25から歪分布データ39を読み出して、あるいは歪解析部30から直接歪分布データ39を読み出して、さらに解析入力データベース24から表面圧力データ35を読み出す。
そして、図5で概念されるようなセル(領域)毎に、表面圧力データ35を歪分布データ39で除する演算を実行することで、それぞれのセルにおける弾性率を演算する。これらはまとめて弾性率分布データ40となり、弾性率解析部31によって、解析出力データベース25に格納される。また、出力部23に出力されてもよい。
【0055】
さらに、ここで図3に示されるステップS6の分解能高度化及びステップS7の解析結果の分解能と理論限界分解能を比較してイタレーションを実行する工程について説明を追加する。
本願発明の重要な特徴の一つとして、このイタレーション機能がある。図3において、ステップS1で示されるように初期相関解析分解能を設定しておき、このステップS6及びステップS7の工程によって、その分解能を高度化してさらにステップS3乃至ステップS5の工程に係る解析を実行し、徐々に解析の分解能を上げていくことで、誤差の少ない高い精度を備えた歪分布解析あるいは弾性率分布解析を可能とするものである。
まず、初期相関解析分解能は、先に説明したとおり、相互相関解析部26によって設定される。その予め定められる初期相関解析分解能は、式(7)に示される検査領域のセルの長さとして与えられるものである。
この初期相関解析分解能を用いて、解析して、ステップS5まで実行されると、次に、相互相関解析部26は、この初期相関解析分解能を高める(小さくする)。このように、相互相関解析部26では解析前に解析入力データベース24に格納された解析条件データ34に含まれるイタレーション情報について読み出しておくか、あるいは解析の途中で、出力部23にイタレーションを実行するか否かの問合せを本システムの使用者に行なうような表示を示して、入力部21から入力されるイタレーション情報を読み出すようにするとよい。
解析分解能を高める具体方法としては、予め定められた一定の分解能を差し引いて新たな分解能として設定してもよいし、初期相関解析分解能の例えば90%や50%などとして設定してもよい。ただ、本実施の形態では、検査領域を1/4に分割して、すなわち式(7)におけるΔLを半分にしてイタレーションを開始する次のステージへと進むこととしている。
次ステージでは、分解能が高められたので検査領域や探査領域におけるセルの1辺(ΔL)は小さくなっているが、ここで解析に供されるデータは、前ステージで過誤ベクトル解析部28や移動ベクトル補間・補正解析部29によって新たに得られたベクトルデータ37である。
【0056】
この新たなベクトルデータ37を参照しながら、再度、分解能が高まって細かくなったセルにおける移動ベクトルに対して、再度相互相関解析部26を用いて相互相関を取り、移動ベクトル設定部27を用いて細かなセルで移動ベクトルを設定し、過誤ベクトル解析部28で過誤ベクトルを排除し、移動ベクトル補間・補正解析部29で移動ベクトルの補間・補正を実行するものである。
すなわち、相互相関解析部26、移動ベクトル設定部27、過誤ベクトル解析部28、移動ベクトル補間・補正解析部29はそれぞれイタレーション機能を備えている。ここで、イタレーション機能を備えているというのは、それぞれの解析部や設定部が分解能を向上させて繰り返し解析が可能な機能を備えているという意味であり、このイタレーション機能を発揮させるように解析を行なうための選択を指示するのは、本実施の形態では相互相関解析部26ということになる。
但し、このイタレーション機能の発揮の選択については、特に相互相関解析部26に限定されるものではなく、他の解析部、例えば歪解析部30や弾性率解析部31であってもよい。
次ステージにおいて、これらの解析部、設定部で得られるデータは、前ステージと同様に、それぞれ相互相関係数データ36、ベクトルデータ37、ベクトル統計データ38として解析出力データベース25に格納されたり、次の解析部等に送信されたり、あるいは出力部23に出力される。また、これらの次ステージのデータは、前ステージのデータにオーバーライトされてもよいし、次ステージの別データとして新たに格納されてもよい。
次ステージで得られたベクトルデータ37を用いて、さらに歪解析部30及び弾性率解析部31では前述と同様に歪分布を解析し、弾性率分布を解析する。
次に、次ステージにおける分解能よりもさらに分解能を高める。本実施の形態では、後で実施例として示すとおり、検査領域をさらに1/4としてΔLをさらに半分とする。
但し、このようにして求められた空間分解能が、いずれは式(1)に示されるコヒーレンス波長lcよりも小さくなってしまう。この場合は、理論的な限界の分解能を越えることになるので、解析は終了する。これを表現したのが、図3のステップS7である。このステップS7に示される理論限界分解能とは、式(1)に示されるコヒーレンス波長lcである。これ以上、セルを細かく分割しても空間分解能は向上することがないため、分解能を高度化する処理を終了するのである。なお、本実施の形態においては、分解能としてΔLやコヒーレンス波長lcなど小さくなるほど分解能が向上するものを選択したので、図3のステップS7のように不等号が示されるが、他の指標をもって分解能として表現した場合に、その指標が大きくなるほど分解能が向上するものであれば、ステップS7の不等号は逆になる。
また、図3ではステップS6、ステップS7を経てステップS8及びステップS9を処理するような工程となっているが、常に、ステップS7からステップS2へ向かうイタレーションを実行する必要はなく、ステップS5からステップS8、9へ進んでもよいし、ステップS6,7を含む場合でも、毎回ステップS8,9を実行してから、ステップS7からステップS2へ向かうイタレーションを実行してもよいことは言うまでもない。
さらに、ステップS10−1とステップS10−2として、それぞれ解析結果出力工程と解析結果格納工程が示されているが、これもステップS9の後に行なわれる工程というよりも便宜的に工程の符号が付されるものであり、各工程によって解析された結果については、前述のとおり適宜出力部23に出力されたり、解析出力データベース25に格納されたりすることになる。
【0057】
以上、弾性率分布計測システム6b及び弾性率分布計測方法の実施の形態として説明したが、この弾性率分布計測システム6bにおいて、弾性率解析部31と解析入力データベース24に格納される表面圧力データ35を備えないものとして歪分布計測システム6aが概念され、それ以外は共通にこれまで説明した構成要素を含み、それぞれ同様の作用及び効果を発揮するものである。もちろん、歪分布計測システム6aでは、弾性率解析部31がないので、弾性率分布データ40は解析されることはなく、解析出力データベース25にも格納されず、出力部23に出力されることもない。
また、図3を参照しながら弾性率分布計測方法及び歪分布計測方法の実施の形態について説明したが、歪分布計測システム6aと弾性率分布計測システム6bの関係と同様に、歪分布計測方法においては、図3におけるステップS9が存在せず、また入力部21に記載されている表面圧力データ入力の工程がないものの、それ以外の工程は弾性率分布計測方法と共通に存在している。
【0058】
以上のようにして得られた歪分布や弾性率分布は、心筋梗塞などの急性冠症候群に対する治療において、血管内の不安定プラークの存在等を高精度で検出可能とするものである。特に、弾性率分布を得ることで、血管と不安定プラークとでは弾性率が異なることから不安定プラークの存在を明確化することが可能であり、また生体組織構造を可視化することも可能である。もちろん、血管以外の生体組織にも応用することは可能であり多様な利用が考えられる。
また、超音波よりも分解能を高くすることが可能な近赤外光などの光源を用いて光干渉に関するデータを測定することによれば、本実施の形態における測定データの処理に関する高い分解能の効果と相まって、より精度の高い歪分布あるいは弾性率分布を得ることが可能となる。
このような歪分布計測システムや弾性率分布計測システム、あるいは歪分布計測方法及び弾性率分布計測方法により、医学分野では、循環系の疾患の早期発見はもとより、疾患の診断、治療の効果の定量的な把握、治癒確認など医療現場で様々な用途に用いることが可能となるし、工学分野では、前述のように非破壊検査等において、より精度の高い診断や検査を実施することが可能となる。
なお、本実施の形態においては、光干渉データを用いた場合について説明したが、冒頭に述べたとおり、光源の代わりに超音波源を用いて、超音波エコー信号を測定することによっても同様に歪分布計測システムや弾性率分布システムとしては成立する。また、超音波エコーを測定する場合には、図1に示されるOCT光学系2に代えて、超音波エコー系を用いる必要があるが、これは現在用いられているような通常のものを設置すれば足りるので、本願では特に説明を省略する。
以下、本実施の形態に係る具体的な実施例として実験を行なったので、その結果について説明する。
【実施例】
【0059】
実験は、図1、2で示される構成で行われた。本実験も光干渉データを取得する場合のものとして実施しているが、超音波エコーデータを取得する場合もOCT光学系に代えて超音波エコー系を採用することによれば同様である。
光源のスーパールミネッセントダイオード7としては、中心波長λc=831nm、半値全幅Δλ=55nmのスーパールミネッセントダイオードを用いた。式(1)のコヒーレンス波長lcの理論値は5.54μmであるが、スペクトル形状を考慮するとサイドローブの影響から、光軸方向(Z方向)の空間分解能は10μm程度と考えられる。
非球面モールドガラスレンズ(N.A.=0.4,f=6.25mm)を対物レンズ10として用い、被測定対象物3に集光照射した。
ビームスポット径6.61μmが光軸垂直方向(X方向)の空間分解能となるため、4μmおきにX方向の走査を行なった。図1に示すシステムでは、参照鏡9を一定速度(Vm/s)にて走査することにより、干渉信号のドップラーシフト周波数成分(fD=2ν/λc)をアンプ4を用いて増幅し、光干渉データを得た。
被写界深度は330μmとなり、この領域においてコヒーレンスゲートが掛かり、光干渉データが得られる。被測定対象物3である試料を圧縮するために線形駆動器12を設置し、光軸垂直方向に均一試料は50μm、不均一試料は20μm圧縮し、圧縮前後の光コヒーレンス断層画像(光干渉データ)を得た。
なお、試料は一辺1cm程度と小さいため、線形駆動器12は試料端面全体を一様に圧縮しているとみなすことができる。
光コヒーレンス断層画像の範囲は、X×Z=1200×1200μmであり、4μmを1ピクセルとして画像化(X×Z=300×300ピクセル)した。実験試料はagar粉末1g(弾性率:3.92〜4.90kPa)を熱湯60mlに溶解し微少ポリスチレン粒子(粒子径1μm)を混入した物を均一試料とした。
これに外径275μmの釣糸(弾性率:1.47〜2.45GPa)を混入させたものを不均一試料として圧縮実験を行なった。
【0060】
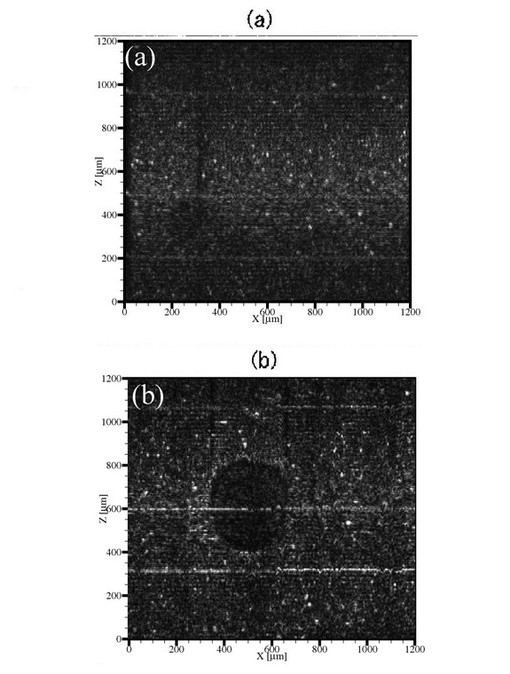
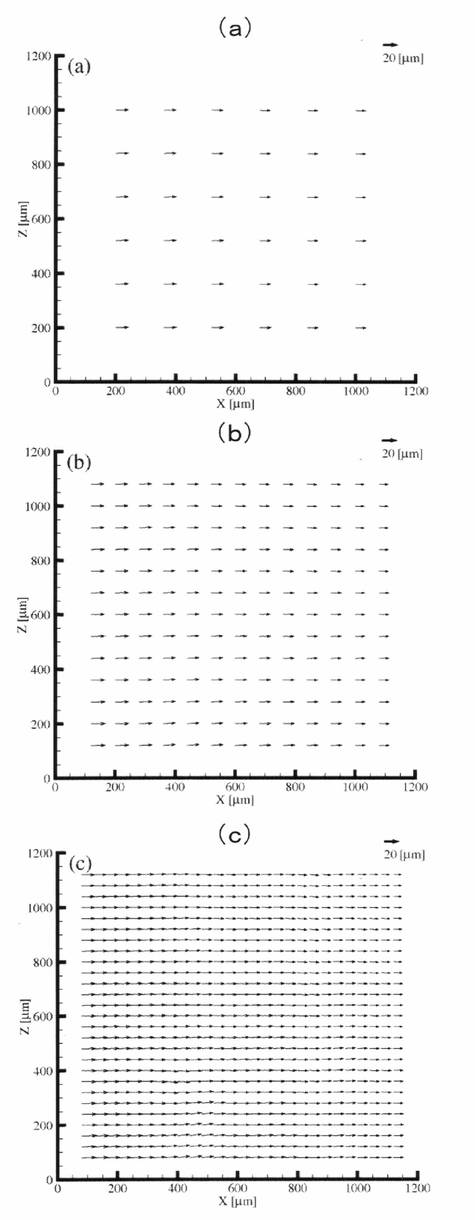
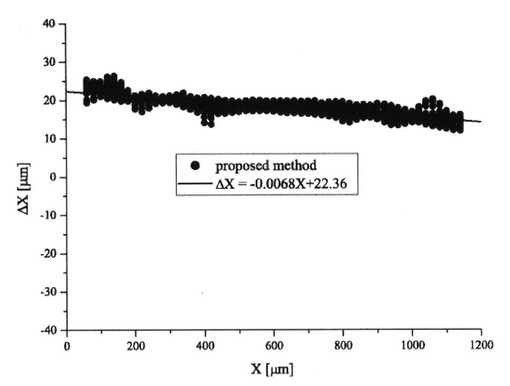
図9(a)に均一試料の光コヒーレンス断層画像を示した。画像中の白い斑点は混入されたポリスチレン粒子によるスペックル・パターンである。図10 に、本手法により得られた移動ベクトルを各ステージ毎に示す。なお、第1ステージにおける検査領域と探査領域の大きさはMx=Mz=320μm、Nx=Nz=400μmと設定した。
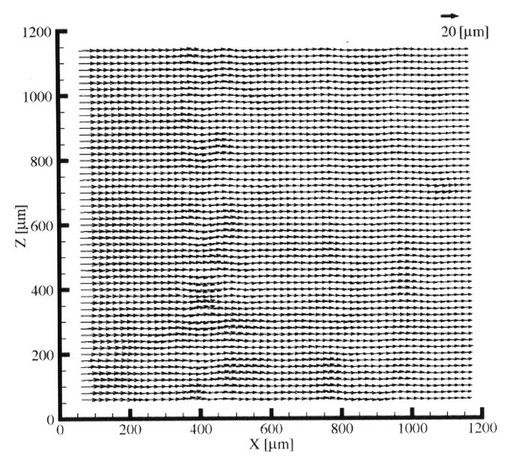
図10(a)乃至(c)より明らかなように、第1ステージからステージを上げるごとに、イタレーションによる再帰的相関処理によって移動ベクトルが高分解能化している。最高分解能を有する最終ステージは、光コヒーレンス断層画像の空間分解能と検査領域内におけるスペックル・パターンの情報量によって決定される。本実施例における実験ではスペックル・パターン粒子像が約10μmであり、光コヒーレンス断層画像の空間分解能も10μm程度と考えられるため、ΔL=20μmの空間分解能を有する第4ステージを最終ステージとした。これを図11に示す。各ステージの移動ベクトル分布から、圧縮方向(X方向) に一様に移動していることが確認できる。図12に第4ステージにおけるX方向の移動量分布を示す。X 方向の平均移動量は18.26μmであり、同ステージでのZ方向の平均移動量は0.22μmであった。Z方向の平均移動量は光コヒーレンス断層画像の分解能以下であることから、圧縮方向にのみ移動していることが確認できる。図12に示すように、X方向移動量に関する近似直線から算出した移動量変化率は−0.68%であり、圧縮方向に移動量が減少していることを20μmの高分解能で検出している。ここで、均一試料端面を一様圧縮したと仮定した場合、試料幅の計測値を用いると圧縮方向の変化率は−0.43%と算出できる。両変化率には0.25%の誤差が発生しているが、計測領域1200μmにおける誤差距離に換算した場合3.0μmとなり、光軸垂直方向の分解能6.61μm以下である。
さらに、X方向およびZ方向の移動量に関するばらつき誤差は±1.10μm、±1.00μmであり、各方向の分解能を考慮すると誤差範囲内であることがわかる。この結果、均一試料に対して一様圧縮の仮定に基づく結果と一致すると考えられ、本願発明による手法の妥当性が検証された。従来法との比較のため、サブピクセル処理を導入した直接相互相関法を、同一空間分解能において適用した。
【0061】
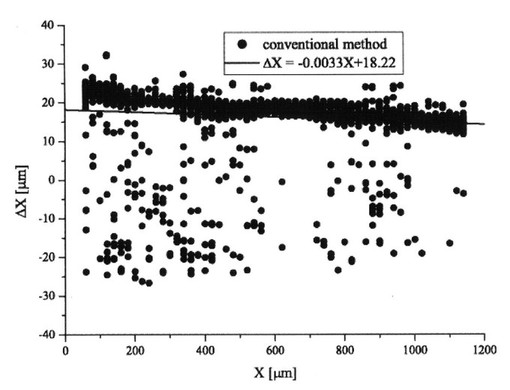
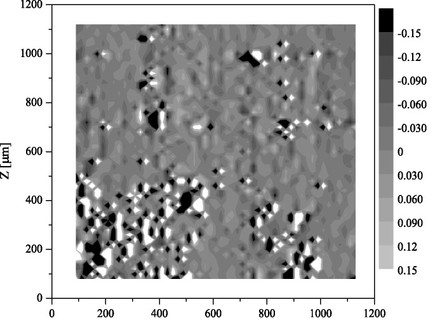
図13と図14に、従来法による移動ベクトル分布およびX方向移動量分布を示す。なお、探査領域の大きさ(Nx=Nz)は誤差を最小にする条件に設定している。X方向の移動量の減衰は、本願発明による手法と同様の結果を示している。しかし、X方向とZ方向に対する移動量のばらつき誤差は、それぞれ±7.81μm、±4.66μmと各方向の分解能より大きいため、高分解能の移動ベクトル分布を従来法を用いて算出することは困難である。図13から確認できるように、これは過誤ベクトルによる影響と考えられる。しかし、本発明の手法は過誤ベクトルの発生を抑制するとともに、その発生が少ない大きな検査領域から移動方向を限定し再帰的に相関処理を行うため、高空間分解能の移動ベクトル分布を算出することが可能である。本願発明の手法と従来法の移動ベクトル分布から算出したX方向の歪み分布を、図15と図16に示す。本手法は一様な歪みが確認できるが、従来法は局所的な歪みが発生していることが目視できる。均一試料端面を一様圧縮したと仮定し算出した歪み量を基準に、本計測結果の平均2乗誤差は2.12%であり、従来法による結果は45.88%であった。この両者を比較した場合、95.4%の歪み量誤差の低減を実現している。Z方向の歪み量についても、91.6%の誤差低減が可能であった。歪み量は空間微分量であるため、従来法では誤差を増大させてしまうが、本発明の手法では過誤ベクトル除去後に最小2乗法によって空間補間および補正処理を行うため、空間微分量の連続性が向上している。
【0062】
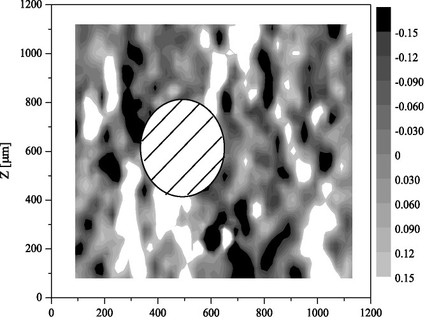
図9(b)は不均一試料の画像である。(X,Z)=(500μm,600μm)を中心とする楕円状の黒い部分が弾性率の異なる釣糸を表し、ポリスチレン
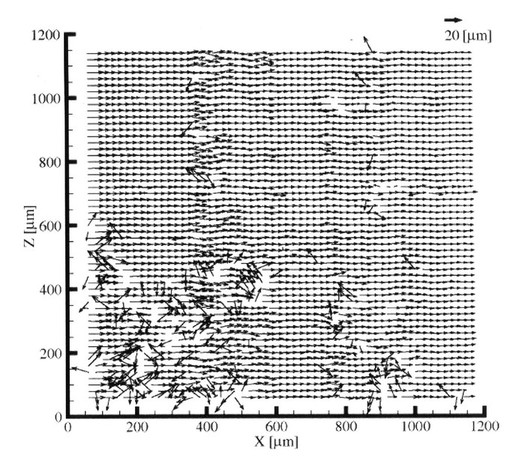
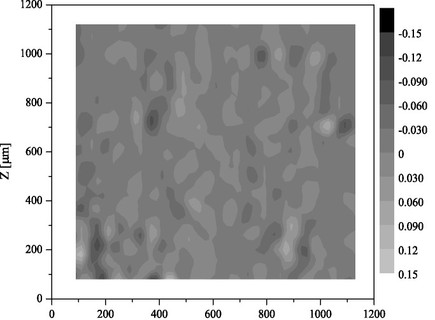
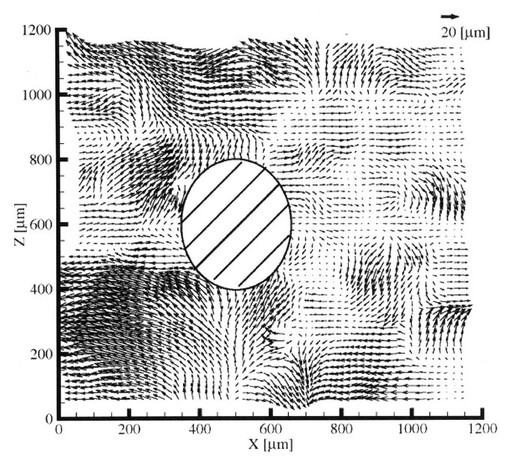
粒子によるスペックル・パターンと共に画像化されている。本発明の手法を適用した第4ステージ(ΔL=20μm)における移動ベクトル分布および歪み分布を、図17と図18に示す。図中における斜線部は釣糸部を表している。移動ベクトル分布は圧縮方向(X方向)に一様移動しておらず、釣糸周辺において歪曲した大きな移動ベクトルが確認できる。均一Agar粉末試料に対して高弾性係数を有する釣糸部の周辺では、圧縮により大きな変形が発生したことが理解できる。図15と図18を比較すると、不均一試料の歪み分布に関しては、変形の激しい(X,Z)=(300μm,300μm)と(X,Z)=(300μm,800μm)の付近において、局所的に大きな歪みが発生していることが確認できる。一様圧縮の仮定の下では、圧縮方向における釣り糸周辺部において歪みが発生することが予測できるが、図9(b)よりAgar粉末と釣り糸の境界部において剥離が観察できることから、本実験では一様圧縮の理想的な条件とは異なるため、比較検討することは困難であると考える。しかし、弾性率の異なる不均一試料において現れる特徴的な組織変形を観察可能であることが検証された。
【0063】
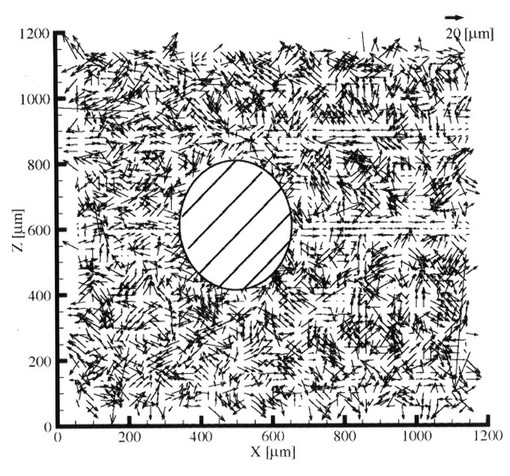
前述した均一試料における場合と同様に、同一空間分解能において従来法を適用し比較検討を行った。その結果を図19と図20に示す。両図から明らかなように、過誤ベクトルの多発によって局所的な歪みが斑状に現れている。高空間分解能による直接相互相関法は、検査領域内の情報量減少に伴う相関ピークの多発が過誤ベクトル発生を増加させる。それに加え、不均一試料においては回転を伴う複雑な移動現象が発生しているため、従来法では移動ベクトルの同定が不可能であると考えられる。しかし、本願発明における手法では、再帰的なスペックル相互相関法と最小2乗法などの統計的手法による空間補間処理の組み合わせにより、複雑な移動現象も高空間分解能で追跡が可能である。
これらの結果から、線維性被膜、脂質コア、石灰質などの弾性率の異なる組織が介在する不安定プラークにおいて、その力学特性を高空間分解能で検出できる可能性が明らかとなり、本願発明の作用及び効果が実証されるに至った。
【産業上の利用可能性】
【0064】
以上説明したように、本発明の請求項1乃至請求項12に記載された発明は、循環系の疾患の早期発見のための健康診断用の装置やシステムとして利用可能であり、さらに、疾患の診断用装置・システム、治療の効果の定量的な把握、治癒確認のための装置やシステムなどあらゆる医療現場で用いることが可能である。
また、人間のみならず、動物などを取り扱う獣医院などでの利用が可能である。
さらに、動植物の生体組織のみならず、非破壊検査用の装置への応用なども考えられる。
【図面の簡単な説明】
【0065】
【図1】本発明の本実施の形態に係る弾性率分布計測システムを含み、被測定対象物である生体組織を圧縮して、その前後で得られる光干渉データを取得して生体組織における弾性率分布を計測するための組織弾性画像計測システムの概念図である。
【図2】本実施の形態に係る弾性率分布計測システム(歪分布計測システム)のシステム構成図である。
【図3】本願発明の実施の形態に係る弾性率分布計測方法(歪分布計測方法)の工程を示すフロー図である。
【図4】相互相関解析部26において実行される相互相関解析を説明するための概念図である。
【図5】移動ベクトルの概念図である。
【図6】過誤ベクトル解析部のシステム構成図である。
【図7】(a)及び(b)は、過誤ベクトル解析部で実行される、あるいはステップS4で実行される過誤ベクトルの排除を説明するための概念図である。
【図8】(a)及び(b)は、移動ベクトル補間・補正解析部で実行される、あるいはステップS5として実行されるベクトル分布の補間・補正処理を説明するための概念図である。
【図9】実施例の欄で説明した実験によって得られた光コヒーレンス断層画像であり、(a)は均一試料において得られた画像であり、(b)は不均一試料において得られた画像である。
【図10】実施例の欄で説明した実験によって得られた移動ベクトルの画像であり、(a)はΔL=160μmの空間分解能を有するもの、(b)はΔL=80μmの空間分解能を有するもの、(c)はΔL=40μmの空間分解能を有するものである。
【図11】実施例の欄で説明した実験によって得られた移動ベクトルの画像であり、最終ステージとして設定された第4ステージにおけるもので、ΔL=20μmの空間分解能を有するものである。
【図12】第4ステージの移動ベクトル分布から演算されるX方向の移動量分布を示すグラフである。
【図13】従来法によって得られた移動ベクトル分布を示す画像である。
【図14】従来法によって得られた移動ベクトル分布から演算されたX方向移動量分布を示すグラフである。
【図15】本願発明の手法によって得られた移動ベクトル分布から演算されたX方向の歪分布である。
【図16】従来法によって得られた移動ベクトル分布から演算されたX方向の歪分布である。
【図17】本願発明の手法を適用して得られた第4ステージ(ΔL=20μm)における移動ベクトル分布である。
【図18】本願発明の手法を適用して得られた第4ステージ(ΔL=20μm)における歪分布である。
【図19】従来法によって不均一試料を用いて同一空間分解能(ΔL=20μm)において得られた移動ベクトル分布である。
【図20】従来法によって不均一試料を用いて同一空間分解能(ΔL=20μm)において得られた歪分布である。
【符号の説明】
【0066】
1…組織弾性画像計測システム 2…OCT光学系 3…被測定対象物 4…アンプ 5…A/D変換器 6a…歪分布計測システム 6b…弾性率分布計測システム 7…スーパールミネッセントダイオード 8…ビームスプリッター 9…参照鏡 10…対物レンズ 11…光検出器 12…線形駆動器 21…入力部 22…解析部 23…出力部 24…解析入力データベース 25…解析出力データベース 26…相互相関解析部 27…移動ベクトル設定部 28…過誤ベクトル解析部 29…移動ベクトル補間・補正解析部 30…歪解析部 31…弾性率解析部 32…光干渉データ 33…システムデータ 34…解析条件データ 35…表面圧力データ 36…相互相関係数データ 37…ベクトルデータ 38…ベクトル統計データ 39…歪分布データ 40…弾性率分布データ 45…移動ベクトル 46…標準偏差解析部 47…中間値解析部 48…過誤ベクトル判定部 49…移動ベクトルエラー相関解析部 50a,50b…移動ベクトル
【特許請求の範囲】
【請求項1】
入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の超音波エコーデータ又は光干渉データ(以下、これらを総称して単に測定データという。)から歪分布を解析する歪分布計測システムであって、
前記入力部は、前記圧縮前後の測定データを前記データ格納部に入力可能な手段であって、
前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部とを有し、
前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、
前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とする歪分布計測システム。
【請求項2】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とする請求項1記載の歪分布計測システム。
【請求項3】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とする請求項1記載の歪分布計測システム。
【請求項4】
前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とする請求項1乃至請求項3のいずれか1項に記載の歪分布計測システム。
【請求項5】
入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の測定データから弾性率分布を解析する弾性率分布計測システムであって、
前記入力部は、前記圧縮前後の測定データと前記被測定対象の表面圧力データを前記データ格納部に入力可能な手段であって、
前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部と、前記表面圧力データと前記歪分布解析部において演算された空間変化率を用いて弾性率を演算する弾性率分布解析部とを有し、
前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、
前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とする弾性率分布計測システム。
【請求項6】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とする請求項5記載の弾性率分布計測システム。
【請求項7】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とする請求項5記載の弾性率分布計測システム。
【請求項8】
前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とする請求項5乃至請求項7のいずれか1項に記載の弾性率分布計測システム。
【請求項9】
コンピュータが各工程を実行しながら被測定対象の圧縮前後の測定データから歪分布を解析する歪分布計測方法において、
入力部が前記圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程と、相互相関解析部が前記測定データを前記データ格納部から読み出して所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する工程と、移動ベクトル設定部がこの解析された前記相互相関係数をキーとして最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する工程と、過誤ベクトル解析部が、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する工程と、移動ベクトル補間・補正解析部が前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる工程と、歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程と、出力部が前記移動ベクトルの空間変化率の分布を出力する工程とを有することを特徴とする歪分布計測方法。
【請求項10】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とする請求項9記載の歪分布計測方法。
【請求項11】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とする請求項9記載の歪分布計測方法。
【請求項12】
請求項9乃至請求項11のいずれか1項に記載の歪分布計測方法に新たな工程を加えた弾性率分布計測方法であって、
前記入力部が圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程は、前記被測定対象の表面圧力データを格納する工程を含み、前記歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程の後に、弾性率分布解析部が前記表面圧力データと前記空間変化率を用いて弾性率を演算する工程を有することを特徴とする弾性率分布計測方法。
【請求項1】
入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の超音波エコーデータ又は光干渉データ(以下、これらを総称して単に測定データという。)から歪分布を解析する歪分布計測システムであって、
前記入力部は、前記圧縮前後の測定データを前記データ格納部に入力可能な手段であって、
前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部とを有し、
前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、
前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とする歪分布計測システム。
【請求項2】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とする請求項1記載の歪分布計測システム。
【請求項3】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とする請求項1記載の歪分布計測システム。
【請求項4】
前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とする請求項1乃至請求項3のいずれか1項に記載の歪分布計測システム。
【請求項5】
入力部と、データ格納部と、解析部と、出力部を有して、被測定対象の圧縮前後の測定データから弾性率分布を解析する弾性率分布計測システムであって、
前記入力部は、前記圧縮前後の測定データと前記被測定対象の表面圧力データを前記データ格納部に入力可能な手段であって、
前記解析部は、前記測定データの所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する相互相関解析部と、この相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する移動ベクトル設定部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する過誤ベクトル解析部と、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる移動ベクトル補間・補正解析部と、連続化された移動ベクトルの空間変化率を演算する歪分布解析部と、前記表面圧力データと前記歪分布解析部において演算された空間変化率を用いて弾性率を演算する弾性率分布解析部とを有し、
前記データ格納部は、前記解析部において実行される少なくとも1の解析の出力データを格納し、
前記出力部は、前記解析部で実行される少なくとも1の解析の出力データを前記解析部又は前記データ格納部から読み出して出力可能な手段であることを特徴とする弾性率分布計測システム。
【請求項6】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とする請求項5記載の弾性率分布計測システム。
【請求項7】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とする請求項5記載の弾性率分布計測システム。
【請求項8】
前記相互相関解析部、移動ベクトル設定部、過誤ベクトル解析部及び前記移動ベクトル補間・補正解析部はイタレーション機能を備え、前記移動ベクトル補間・補正解析部によって連続化された移動ベクトルが存在する評価領域を分割して分割された評価領域において、再度、相互相関解析部は圧縮前後の測定データの位置変位に関する相互相関係数を演算し、移動ベクトル設定部は相互相関解析部において解析された前記相互相関係数が最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定し、前記過誤ベクトル解析部は前記過誤ベクトルを判断して除去し、前記移動ベクトル補間・補正解析部は移動ベクトルの分布の連続化を実行することを特徴とする請求項5乃至請求項7のいずれか1項に記載の弾性率分布計測システム。
【請求項9】
コンピュータが各工程を実行しながら被測定対象の圧縮前後の測定データから歪分布を解析する歪分布計測方法において、
入力部が前記圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程と、相互相関解析部が前記測定データを前記データ格納部から読み出して所望の評価領域において前記圧縮前後の測定データの位置変位に関する相互相関係数を演算する工程と、移動ベクトル設定部がこの解析された前記相互相関係数をキーとして最大となる位置変位の始点と終点を選択し、これらの始点と終点を備えた圧縮による移動ベクトルを設定する工程と、過誤ベクトル解析部が、前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第1の統計的処理を実行して、前記移動ベクトルのうち過誤ベクトルを除去する工程と、移動ベクトル補間・補正解析部が前記移動ベクトルの周囲近傍の複数の移動ベクトルに対して第2の統計的処理を実行して、前記移動ベクトルの分布を連続化させる工程と、歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程と、出力部が前記移動ベクトルの空間変化率の分布を出力する工程とを有することを特徴とする歪分布計測方法。
【請求項10】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の移動ベクトルから得られる標準偏差及び中間値という統計的解析値を基準として、前記中間値から前記標準偏差の予め定められた係数倍の乖離幅が、予め定められた幅を超える場合あるいは等しい場合に過誤ベクトルと判断する処理であることを特徴とする請求項9記載の歪分布計測方法。
【請求項11】
前記第1の統計的処理は、前記移動ベクトルの周囲近傍の複数の相互相関係数の集合と、前記移動ベクトルに隣接した他の移動ベクトルの周囲近傍の複数の相互相関係数の集合との間で、相関を取る処理であることを特徴とする請求項9記載の歪分布計測方法。
【請求項12】
請求項9乃至請求項11のいずれか1項に記載の歪分布計測方法に新たな工程を加えた弾性率分布計測方法であって、
前記入力部が圧縮前後の測定データをデータ格納部に読み取り可能に格納する工程は、前記被測定対象の表面圧力データを格納する工程を含み、前記歪分布解析部が連続化された移動ベクトルの空間変化率を演算する工程の後に、弾性率分布解析部が前記表面圧力データと前記空間変化率を用いて弾性率を演算する工程を有することを特徴とする弾性率分布計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2007−244533(P2007−244533A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−70053(P2006−70053)
【出願日】平成18年3月14日(2006.3.14)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2005年(平成17年)9月18日 社団法人日本機械学会発行の「2005年度年次大会講演論文集(5)通計番号No.05−1」に発表
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2006年(平成18年)1月12日 社団法人日本機械学会発行の「第18回バイオエンジニアリング講演会講演論文集 通計番号No.05−66」に発表
【出願人】(304020177)国立大学法人山口大学 (579)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月14日(2006.3.14)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2005年(平成17年)9月18日 社団法人日本機械学会発行の「2005年度年次大会講演論文集(5)通計番号No.05−1」に発表
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2006年(平成18年)1月12日 社団法人日本機械学会発行の「第18回バイオエンジニアリング講演会講演論文集 通計番号No.05−66」に発表
【出願人】(304020177)国立大学法人山口大学 (579)
【Fターム(参考)】
[ Back to top ]