
歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法
【課題】測定対象物の寿命に影響する熱歪(拘束歪)を容易に測定する。
【解決手段】歪測定装置は、コンピュータ1と、測定対象物の第1ステレオ画像PS1を生成する第1ステレオカメラ2と、第1ステレオカメラ2と離間した位置に配設され、測定対象物5の第2ステレオ画像PS2を生成する第2ステレオカメラ3と、測定対象物の温度分布を検出するサーモビュア4と、を備える。また、コンピュータ1は、第1ステレオ画像PS1及び第2ステレオ画像PS2から測定対象物の三次元形状を求めて、実歪εc(i,j)を求める実歪算出部12と、サーモビュア4によって検出された温度分布から熱自由歪εt(i,j)を求める熱自由歪算出部17と、実歪εc(i,j)から熱自由歪εt(i,j)を減じた差を、拘束歪εr(i,j)として求める拘束歪算出部18と、を備える。
【解決手段】歪測定装置は、コンピュータ1と、測定対象物の第1ステレオ画像PS1を生成する第1ステレオカメラ2と、第1ステレオカメラ2と離間した位置に配設され、測定対象物5の第2ステレオ画像PS2を生成する第2ステレオカメラ3と、測定対象物の温度分布を検出するサーモビュア4と、を備える。また、コンピュータ1は、第1ステレオ画像PS1及び第2ステレオ画像PS2から測定対象物の三次元形状を求めて、実歪εc(i,j)を求める実歪算出部12と、サーモビュア4によって検出された温度分布から熱自由歪εt(i,j)を求める熱自由歪算出部17と、実歪εc(i,j)から熱自由歪εt(i,j)を減じた差を、拘束歪εr(i,j)として求める拘束歪算出部18と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象物の熱歪を測定する歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法に関する。
【背景技術】
【0002】
車両に搭載されるエキゾーストマニホールド等のエンジンの排気系部品においては、エンジンから排出される排気ガスが高温になるため、熱歪によって応力が作用して、寿命に影響することが知られている。そこで、エンジンの排気系部品の寿命を評価するためには、歪みを測定する必要があるところ、従来、三次元形状を測定する種々の技術が提案されている。
【0003】
例えば、2台のステレオカメラの撮像領域に配置された測定対象物にパターンを投影し、上記2台のステレオカメラによって、それぞれ、測定対象物のパターン付きステレオ画像を取得し、ステレオ画像処理することによって測定対象物の三次元形状を測定する三次元形状測定装置が開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−270915号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の三次元形状測定装置では、測定対象物の歪みを測定することはできるものの、熱歪によって発生する応力を求めることはできない。すなわち、例え、エンジンの排気系部品が高温になったときであっても、エンジンの排気系部品が自由膨張する場合には、上記応力は作用せず、上記応力は、エンジンとの接続部等における外部からの拘束を受けること、及び、エンジンの排気系部品の温度分布等によって作用するものであるからである。
【0006】
すなわち、上記三次元形状測定装置では、測定対象物の寿命に影響する上記応力(熱歪によって発生する応力)に対応する歪(この歪を、本願においては、「拘束歪」という)を測定することはできない。
【0007】
本発明は、上記課題に鑑みてなされたものであって、拘束歪を容易に測定することの可能な歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る歪測定装置は、以下のように構成されている。
【0009】
すなわち、本発明に係る歪測定装置は、測定対象物の熱歪を測定する歪測定装置であって、前記測定対象物の第1ステレオ画像を生成する第1ステレオカメラと、前記第1ステレオカメラと離間した位置に配設され、前記測定対象物の第2ステレオ画像を生成する第2ステレオカメラと、前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状を求めて、前記実歪を求める実歪算出手段と、前記測定対象物の温度分布を検出するサーモビュアと、前記サーモビュアによって検出された温度分布から前記熱自由歪を求める熱自由歪算出手段と、前記実歪算出手段によって求められた前記実歪から、前記熱自由歪算出手段によって求められた前記熱自由歪を減じた差を、拘束歪として求める拘束歪算出手段と、を備えることを特徴としている。
【0010】
かかる構成を備える歪測定装置によれば、第1ステレオカメラによって前記測定対象物の第1ステレオ画像が生成される。また、前記第1ステレオカメラと離間した位置に配設された第2ステレオカメラによって、前記測定対象物の第2ステレオ画像が生成される。そして、前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状が求められて、前記実歪が求められる。また、サーモビュアによって、前記測定対象物の温度分布が検出され、検出された温度分布から前記熱自由歪が求められる。更に、求められた前記実歪から、求められた前記熱自由歪を減じた差が、拘束歪として求められるため、拘束歪を容易に測定することができる。
【0011】
すなわち、本発明に係る歪測定装置は、測定対象物の実際の歪である実歪から、測定対象物の熱による自由膨張の歪である熱自由歪を減じた差を「拘束歪」として定義して、測定対象物の熱疲労に伴う寿命を評価する指標として、この「拘束歪」を測定するものである。そして、第1ステレオカメラ及び第2ステレオカメラによって、それぞれ、生成された前記第1ステレオ画像及び前記第2ステレオ画像から前記実歪が求められ、サーモビュアによって検出された前記測定対象物の温度分布から前記熱自由歪が求められるため、前記実歪から前記熱自由歪を減じた差である「拘束歪」を容易に測定することができるのである。
【0012】
また、本発明に係る歪測定装置は、前記サーモビュアが、前記第1ステレオカメラ又は前記第2ステレオカメラと近接して配置されていることが好ましい。
【0013】
かかる構成を備える歪測定装置によれば、前記サーモビュアが、前記第1ステレオカメラ又は前記第2ステレオカメラと近接して配置されているため、「拘束歪」を更に容易に測定することができる。
【0014】
すなわち、前記サーモビュアと近接配置されているカメラを基準として実歪を測定することによって、前記実歪を求める格子点と、前記熱自由歪を求める格子点との位置合わせが容易となるため、「拘束歪」を更に容易に測定することができるのである。
【0015】
また、本発明に係る歪測定装置は、前記測定対象物の線膨張係数と前記測定対象物の温度とを対応付けて記憶する膨張係数記憶手段を更に備え、前記熱自由歪算出手段が、前記サーモビュアによって検出された温度分布に含まれる各温度に対応する線膨張係数を、前記膨張係数記憶手段から読み出して、前記熱自由歪を求めることが好ましい。
【0016】
かかる構成を備える歪測定装置によれば、膨張係数記憶手段に、前記測定対象物の線膨張係数と前記測定対象物の温度とが対応付けて記憶されており、前記サーモビュアによって検出された温度分布に含まれる各温度に対応する線膨張係数(図9参照)が、前記膨張係数記憶手段から読み出されて、前記熱自由歪が求められるため、前記熱自由歪を容易に求めることができる。
【0017】
また、本発明に係る歪測定装置は、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角に対応付けて、前記サーモビュアによって検出された温度分布に含まれる各温度を補正する補正係数を記憶する補正係数記憶手段と、前記実歪算出手段によって求められた前記測定対象物の三次元形状から前記傾斜角を求め、求められた傾斜角に対応する補正係数を前記補正係数記憶手段から読み出して、読み出された補正係数を用いて、前記サーモビュアによって検出された温度分布を補正する温度補正手段とを備え、前記熱自由歪算出手段が、前記温度補正手段によって補正された温度分布から前記熱自由歪を求めることが好ましい。
【0018】
かかる構成を備える歪測定装置によれば、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角に対応付けて、前記サーモビュアによって検出された温度分布に含まれる各温度を補正する補正係数が、補正係数記憶手段に記憶されており、前記測定対象物の三次元形状から前記傾斜角が求められ、求められた傾斜角に対応する補正係数(図12参照)が前記補正係数記憶手段から読み出されて、読み出された補正係数を用いて、前記サーモビュアによって検出された温度分布が補正される。そして、補正された温度分布から前記熱自由歪が求められるため、前記熱自由歪を正確に且つ容易に求めることができる。
【0019】
また、本発明に係る線膨張係数測定方法は、以下のように構成されている。
【0020】
すなわち、本発明に係る線膨張係数測定方法は、上記いずれかの歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を求める線膨張係数測定方法であって、前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、前記テストピースに描かれた2つのマーク間の距離を前記第1ステレオカメラ及び前記第2ステレオカメラの少なくとも一方を用いて求める測定工程と、前記測定工程において求められた2つのマーク間の距離から線膨張係数を求める係数算出工程と、を繰り返し実行することによって、前記測定対象物の温度と線膨張係数との関係を求めることを特徴としている。
【0021】
かかる構成を備える線膨張係数測定方法によれば、前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースが、予め設定された温度に均一に加熱されて、前記測定対象物と略同一の位置に配置される。そして、前記テストピースに描かれた2つのマーク間の距離が求められ、求められた2つのマーク間の距離から線膨張係数が求められるため、上記いずれかの歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を容易に求めることができる(図7〜図9参照)。
【0022】
更に、本発明に係るサーモビュアの補正係数測定方法は、以下のように構成されている。
【0023】
すなわち、本発明に係るサーモビュアの補正係数測定方法は、上記いずれかの歪測定装置を用いて、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角と前記サーモビュアの補正係数との関係を求めるサーモビュアの補正係数測定方法であって、前記測定対象物と同一の材料からなり、円柱形のテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、前記サーモビュアによって前記テストピースの表面の温度分布を検出する検出工程と、前記検出工程において検出された前記テストピースの表面の温度分布から補正係数を求める係数算出工程と、を実行することによって、前記測定対象物の傾斜角と補正係数との関係を求めることを特徴としている。
【0024】
かかる構成を備えるサーモビュアの補正係数測定方法によれば、前記測定対象物と同一の材料からなる円柱形のテストピースが、予め設定された温度に均一に加熱されて、前記測定対象物と略同一の位置に配置される。そして、前記サーモビュアによって前記テストピースの表面の温度分布が検出され、検出された前記テストピースの表面の温度分布から補正係数が求められるため、上記いずれかの歪測定装置を用いて、前記測定対象物の傾斜角と補正係数との関係を容易に求めることができる(図10〜図12参照)。
【発明の効果】
【0025】
本発明に係る歪測定装置によれば、第1ステレオカメラによって前記測定対象物の第1ステレオ画像が生成される。また、前記第1ステレオカメラと離間した位置に配設された第2ステレオカメラによって、前記測定対象物の第2ステレオ画像が生成される。そして、前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状が求められて、前記実歪が求められる。また、サーモビュアによって、前記測定対象物の温度分布が検出され、検出された温度分布から前記熱自由歪が求められる。更に、求められた前記実歪から、求められた前記熱自由歪を減じた差が、拘束歪として求められるため、拘束歪を容易に測定することができる。
【0026】
また、本発明に係る線膨張係数測定方法によれば、前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースが、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置される。そして、前記テストピースに描かれた2つのマーク間の距離が求められ、求められた2つのマーク間の距離から線膨張係数が求められるため、上記歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を容易に求めることができる。
【0027】
更に、本発明に係るサーモビュアの補正係数測定方法によれば、前記測定対象物と同一の材料からなる円柱形のテストピースが、予め設定された温度に均一に加熱されて、前記測定対象物と略同一の位置に配置される。そして、前記サーモビュアによって前記テストピースの表面の温度が測定され、測定された前記テストピースの表面の温度から補正係数が求められるため、上記歪測定装置を用いて、前記測定対象物の傾斜角と補正係数との関係を求容易にめることができる。
【図面の簡単な説明】
【0028】
【図1】本発明に係る歪測定装置の一例を示す構成図である。
【図2】図1に示す歪測定装置の平面図及び側面図である。
【図3】図1に示す測定対象物の正面に描かれた格子の一例を示す図である。
【図4】図1にコンピュータの機能構成の一例を示す機能構成図である。
【図5】本発明に係る「拘束歪」の考え方を示す概念図である。
【図6】図4に示す歪測定装置の動作の一例を示すフローチャートである。
【図7】本発明に係る線膨張係数測定方法の一例を示す構成図である。
【図8】本発明に係る線膨張係数測定方法の処理手順の一例を示すフローチャートである。
【図9】線膨張係数の測定結果の一例を示すグラフである。
【図10】本発明に係るサーモビュアの補正係数測定方法の一例を示す構成図である。
【図11】本発明に係るサーモビュアの補正係数測定方法における処理手順の一例を示すフローチャートである。
【図12】サーモビュアの補正係数測定結果の一例を示すグラフである。
【発明を実施するための形態】
【0029】
以下、本発明の実施形態を、図面を参照して説明する。
【0030】
−歪測定装置のハード構成−
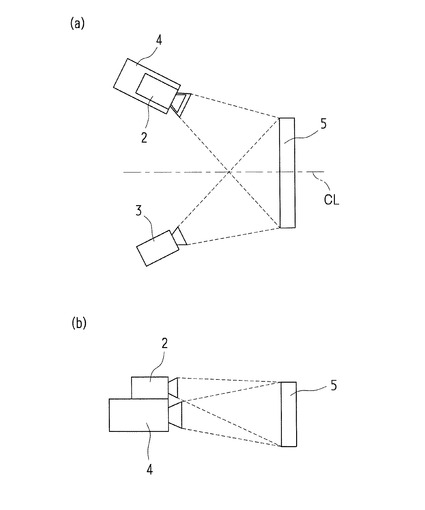
まず、図1、図2を参照して、本発明に係る歪測定装置の構成について説明する。図1は、本発明に係る歪測定装置100の一例を示す構成図である。図2は、図1に示す歪測定装置100の平面図及び側面図である。図2(a)は、図1に示す歪測定装置100の平面図であり、図2(b)は、図1に示す歪測定装置100の側面図である。
【0031】
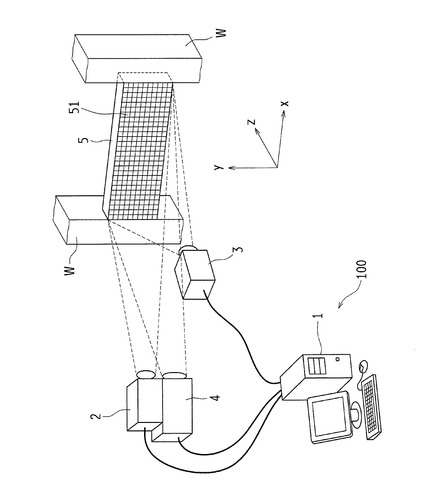
歪測定装置100は、測定対象物5の実際の歪である実歪εcから、測定対象物5の熱による自由膨張の歪である熱自由歪εtを減じた差を拘束歪εrとして測定する装置であって、図1に示すように、コンピュータ1、第1ステレオカメラ2、第2ステレオカメラ3、及び、サーモビュア4を備えている。また、第1ステレオカメラ2、第2ステレオカメラ3、及び、サーモビュア4の視界の略中心位置には、測定対象物5が配置されている。なお、ここでは、測定対象物5は、長方形状の板状体であって、その左右の両端は壁Wによって熱膨張が拘束されている。また、測定対象物5は、図略の熱源によって、その温度が第1温度T1(例えば、20℃)から第2温度T2(例えば、900℃)まで加熱される。本実施形態においては、便宜上、測定対象物5のz軸方向の変形は考えない(測定対象としない)ものとする。
【0032】
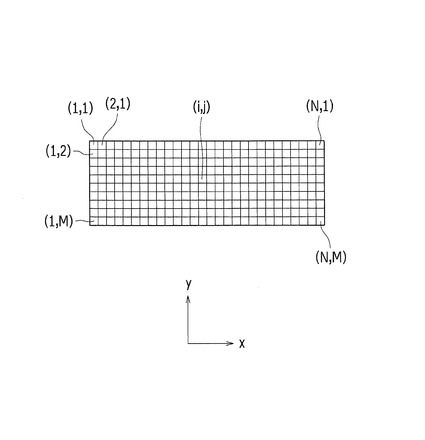
測定対象物5の第1ステレオカメラ2(第2ステレオカメラ3、及び、サーモビュア4)側の正面51には、図1に示すように格子線が描かれている。図3は、図1に示す測定対象物5の正面51に描かれた格子の一例を示す図である。図3に示すように、測定対象物5の正面51に描かれた格子線は、x軸方向にN個(例えば、50個)、y軸方向にM個(例えば、10個)の領域に正面51を均等に分割している。ここでは、各格子を(i,j)で表す。添え字iは、x軸方向の格子の順番を表し、左端が「1」であり、右端が「N」である。同様に、添え字jは、y軸方向の格子の順番を表し、上端が「1」であり、下端が「M」である。また、以下の説明においては、各格子点(i,j)に対応する正面51の温度を、温度T(i,j)と表記する。更に、各格子点(i,j)に対応する正面51の実歪εc、熱自由歪εt、及び、拘束歪εrを、それぞれ、実歪εc(i,j)、熱自由歪εt(i,j)、及び、拘束歪εr(i,j)と表記する。ここで、添え字iは、1からNまでのいずれかの整数であり、添え字jは、1からMまでのいずれかの整数である。
【0033】
コンピュータ1は、いわゆるパーソナルコンピュータ等からなり、歪測定装置100全体の動作を制御するものであって、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等を備えている。ROMは、種々の制御プログラム等を記憶する。CPUは、ROMに記憶された種々の制御プログラムを読み出して各種処理を実行する。RAMは、CPUでの演算結果等を一時的に記憶するメモリである。
【0034】
また、コンピュータ1は、操作入力部、表示部、HDD(Hard disk drive)等を備えている。操作入力部は、外部からの操作を受け付けるものであって、キーボード、マウス等からなる。表示部は、LCD(Liquid Crystal Display)等からなり、CPUによる演算結果等を外部から視認可能に表示するものである。HDDは、種々のデータを記憶するものである。
【0035】
第1ステレオカメラ2は、図2(b)に示すように、サーモビュア4の上に載置され、測定対象物5の第1ステレオ画像PS1を生成するカメラである。第1ステレオカメラ2によって生成された第1ステレオ画像PS1は、コンピュータ1(図4に示す画像取得部11)へ出力される。なお、第1ステレオ画像PS1は、後述する実歪算出部12によって実歪εc(i,j)を求めるときの基準とされる画像である。
【0036】
第2ステレオカメラ3は、第1ステレオカメラ2と離間した位置に配設され、測定対象物5の第2ステレオ画像PS2を生成するカメラである。第2ステレオカメラ3によって生成された第2ステレオ画像PS2は、コンピュータ1(図4に示す画像取得部11)へ出力される。ここで、第2ステレオカメラ3は、図2(a)に示すように、測定対象物5の中心線CLについて第1ステレオカメラ2と線対称となる位置に配置されている。
【0037】
サーモビュア4は、第1ステレオカメラ2の下に配設され、測定対象物5の温度分布を検出する装置である。サーモビュア4によって検出された温度分布を示す情報は、コンピュータ1(図4に示す温度取得部13)へ出力される。
【0038】
上述のように、実歪εc(i,j)を求めるときの基準とされる第1ステレオ画像PS1を生成する第1ステレオカメラ2が、サーモビュア4の上側に載置されているため、「拘束歪εr(i,j)」を更に容易に測定することができる。
【0039】
すなわち、サーモビュア4と近接配置されている第1ステレオカメラ2を基準として実歪εc(i,j)を測定することによって、実歪εc(i,j)を求める格子点(i,j)と、熱自由歪εt(i,j)を求める格子点(i,j)との位置合わせが容易となるため、「拘束歪εr(i,j)」を更に容易に測定することができるのである。
【0040】
本実施形態では、第1ステレオカメラ2が、サーモビュア4の上側に載置されている場合について説明するが、第1ステレオカメラ2又は第2ステレオカメラ3がサーモビュア4と近接して配置されている形態であればよい。例えば、第2ステレオカメラ3がサーモビュア4の真横に配置されている形態でもよい。この場合には、第2ステレオカメラ3によって生成される第2ステレオ画像PS2が、後述する実歪算出部12によって実歪εc(i,j)を求めるときの基準となる画像として用いられる。
【0041】
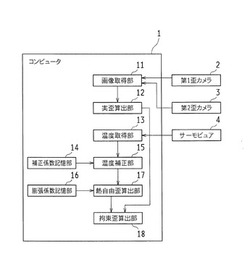
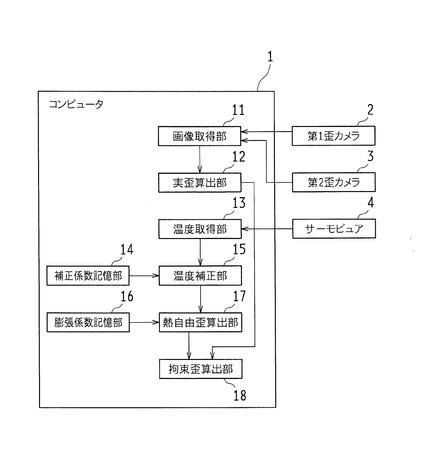
−コンピュータの機能構成−
次に、図4を参照してコンピュータ1の構成について説明する。図4は、図1にコンピュータの機能構成の一例を示す機能構成図である。コンピュータ1は、ROM等に記憶された制御プログラムを読み出して実行することによって、画像取得部11、実歪算出部12、温度取得部13、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18等の機能部として機能する。ここで、実歪算出部12、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18は、本発明に係る歪測定装置100の一部に相当する。
【0042】
画像取得部11は、第1ステレオカメラ2によって生成された第1ステレオ画像PS1、及び、第2ステレオカメラ3によって生成された第2ステレオ画像PS2を取得する機能部である。
【0043】
実歪算出部12は、画像取得部11によって取得された第1ステレオ画像PS1及び第2ステレオ画像PS2に基づいて、測定対象物5の正面51における実歪εc(i,j)を求める機能部である。ここで、実歪算出部12は、特許請求の範囲に記載の「実歪算出手段」に相当する。
【0044】
具体的には、実歪算出部12は、画像取得部11によって取得された第1ステレオ画像PS1及び第2ステレオ画像PS2に基づいて、第1温度T1(例えば、20℃)及び第2温度T2(例えば、900℃)の、それぞれの場合に、測定対象物5の正面51における各格子点(i,j)の中心位置のx−y座標(x1ij、y1ij)及び(x2ij、y2ij)を求める。ここで、添え字iは、1からNのいずれかの整数であり、添え字jは、1からMのいずれかの整数である。このように、2つのステレオ画像に基づいて各格子点(i,j)の中心位置のx−y座標を求める方法は、公知である(“Image Correlation for Deformation and Shape Measurements : Basic Concepts, Theory and Applications”、Chapter4:Two-Dimensional and Three-Dimensional Computer Vision、P65-P80、著者:Sutton.M.A.、Orteu.J.、2009年4月出版、出版社:Springer、ISBN:9780387787466、及び、特開2009−270915号公報、特開2001−241928号公報参照)から、ここでは、その説明を省略する。
【0045】
次に、実歪算出部12は、第1温度T1及び第2温度T2の、それぞれの場合に、測定対象物5の正面51における各格子点(i,j)の中心位置の座標(x1ij、y1ij)及び(x2ij、y2ij)から、各格子点(i,j)における実歪εc(i,j)を、幅方向(x軸方向)の実歪εcx(i,j)、及び、高さ方向(y軸方向)の実歪εcy(i,j)として求める。幅方向の実歪εcx(i,j)は、例えば、次の(1)〜(4)式によって求められる。
【0046】
εcx(i,j)=ΔLx(i,j)/L1x(i,j) (1)
ΔLx(i,j)=L2x(i,j)−L1x(i,j) (2)
L1x(i,j)=((x1ij−x1(i−1)j)2+
(y1ij−y1(i−1)j)2)1/2 (3)
L2x(i,j)=((x2ij−x2(i−1)j)2+
(y2ij−y2(i−1)j)2)1/2 (4)
また、高さ方向の実歪εcy(i,j)は、例えば、次の(5)〜(8)式によって求められる。
【0047】
εcy(i,j)=ΔLy(i,j)/L1y(i,j) (5)
ΔLy(i,j)=L2y(i,j)−L1y(i,j) (6)
L1y(i,j)=((x1ij−x1i(j−1))2+
(y1ij−y1i(j−1))2)1/2 (7)
L2y(i,j)=((x2ij−x2i(j−1))2+
(y2ij−y2i(j−1))2)1/2 (8)
すなわち、実歪εc(i,j)は、第1温度T1から第2温度T2に変化した場合の、各格子点(i,j)の中心位置から隣接する格子点の中心位置との距離の変化(L1→L2)に基づいて求められる。
【0048】
より具体的には、幅方向の実歪εcx(i,j)は、第1温度T1から第2温度T2に変化した場合の、各格子点(i,j)の中心位置から左側に隣接する格子点の中心位置までの距離の変化(L1x→L2x)に基づいて求められる。また、高さ方向の実歪εcy(i,j)は、第1温度T1から第2温度T2に変化した場合の、各格子点(i,j)の中心位置から上側に隣接する格子点の中心位置までの距離の変化(L1y→L2y)に基づいて求められる。なお、以下の説明においては、幅方向の実歪εcx(i,j)及び高さ方向の実歪εcy(i,j)を、便宜上、実歪εc(i,j)と総称する。
【0049】
温度取得部13は、サーモビュア4によって検出された温度分布情報を取得する機能部である。また、温度取得部13は、取得した温度分布情報に基づいて、測定対象物5の正面51における各格子点(i,j)に対応する位置の温度Tijを求める。
【0050】
補正係数記憶部14は、サーモビュア4から測定対象物5に向かう視線方向と直交する面と測定対象物5の表面とのなす角である傾斜角θに対応付けて、サーモビュア4によって検出された温度分布に含まれる各温度を補正する補正係数β(θ)(図9参照)を記憶する機能部である。ここで、補正係数記憶部14は、特許請求の範囲に記載の「補正係数記憶手段」に相当する。
【0051】
具体的には、補正係数記憶部14は、ROM等にマップ又はLUT(ルックアップテーブル)として、傾斜角θに対応付けて補正係数β(θ)を記憶する。また、本実施形態においては、補正係数β(θ)は、図10〜図12を用いて後述する本発明に係るサーモビュア4の補正係数測定方法によって求められ、補正係数記憶部14に記憶されているものとする。
【0052】
温度補正部15は、実歪算出部12によって求められた測定対象物5の三次元形状から傾斜角θを求め、求められた傾斜角θに対応する補正係数β(θ)を補正係数記憶部14から読み出して、読み出された補正係数β(θ)を用いて、サーモビュア4によって検出された温度分布を補正する機能部である。ここで、温度補正部15は、特許請求の範囲に記載の「温度補正手段」に相当する。
【0053】
具体的には、温度補正部15は、次の(9)式によって、サーモビュア4によって検出された各格子点(i,j)の温度TS(i,j)を補正して、補正後の温度TA(i,j)を求める。
【0054】
TA(i,j)=TS(i,j)/β(i,j) (9)
ここで、β(i,j)は、各格子点(i,j)の傾斜角に対応する補正係数である。ただし、上述のように、本実施形態では、便宜上、測定対象物5のz軸方向の変形は考えない(測定対象としない)ため、傾斜角θは「0」として補正が行われる。
【0055】
上述のように、サーモビュア4から測定対象物5に向かう視線方向と直交する面と測定対象物5の表面とのなす角である傾斜角θに対応付けて、サーモビュア4によって検出された温度分布Tに含まれる各温度TS(i,j)を補正する補正係数β(θ)が、補正係数記憶部14に記憶されており、温度補正部15によって、測定対象物5の三次元形状から傾斜角θが求められ、求められた傾斜角θに対応する補正係数β(θ)(図12参照)が補正係数記憶部14から読み出されて、読み出された補正係数β(θ)を用いて、サーモビュア4によって検出された温度TS(i,j)が補正される。そして、補正された温度TA(i,j)から熱自由歪εt(i,j)が求められるため、熱自由歪εt(i,j)を正確に且つ容易に求めることができる。
【0056】
膨張係数記憶部16は、測定対象物5の線膨張係数αと測定対象物5の温度Tとを対応付けて記憶する機能部である。ここで、膨張係数記憶部16は、特許請求の範囲に記載の膨張係数記憶手段に相当する。
【0057】
具体的には、膨張係数記憶部16は、ROM等にマップ又はLUT(ルックアップテーブル)として、温度Tに対応付けて線膨張係数α(T)を記憶する。また、本実施形態においては、線膨張係数α(T)は、図7〜図9を用いて後述する本発明に係る線膨張係数測定方法によって求められ、膨張係数記憶部16に記憶されているものとする。
【0058】
熱自由歪算出部17は、サーモビュア4によって検出された測定対象物5の温度分布から熱自由歪εtを求める機能部である。熱自由歪算出部17は、特許請求の範囲に記載の「熱自由歪算出手段」に相当する。
【0059】
具体的には、熱自由歪算出部17は、サーモビュア4によって検出された温度分布に含まれる各格子点(i,j)の各温度T(i,j)に対応する線膨張係数α(T(i,j))を、膨張係数記憶部16から読み出して、次の(10)、(11)式によって熱自由歪εt(i,j)を、それぞれ、幅方向の熱自由歪εtx(i,j)、及び、高さ方向の熱自由歪εty(i,j)として求める。
【0060】
εtx(i,j)=(α(T(i,j))−α0)×L1x(i,j) (10)
εty(i,j)=(α(T(i,j))−α0)×L1y(i,j) (11)
ここで、α0は、測定対象物5の初期温度である第1温度T1における線膨張係数αの値である。また、(10)式のL1x(i,j)、及び、(11)式のL1y(i,j)は、それぞれ、上記(3)式、及び、上記(7)式で与えられる第1温度T1における測定対象物5の幅方向の格子間距離及び高さ方向の格子間距離である。なお、以下の説明においては、幅方向の熱自由歪εtx(i,j)及び高さ方向のεty(i,j)を、便宜上、熱自由歪εt(i,j)と総称する。
【0061】
上述のように、膨張係数記憶部16に、測定対象物5の線膨張係数α(T)と測定対象物5の温度Tとが対応付けて記憶されており、サーモビュア4によって検出された温度分布に含まれる各温度T(i,j)に対応する線膨張係数α(T(i,j))(図9参照)が、膨張係数記憶部16から読み出されて、熱自由歪εt(i,j)が求められるため、熱自由歪εt(i,j)を容易に求めることができる。
【0062】
拘束歪算出部18は、実歪算出部12によって求められた実歪εc(i,j)から、熱自由歪算出部17によって求められた熱自由歪εt(i,j)を減じた差を、拘束歪εr(i,j)として求める機能部である。ここで、拘束歪算出部18は、特許請求の範囲に記載の「拘束歪算出手段」に相当する。
【0063】
すなわち、拘束歪算出部18は、次の(12)式によって、各格子点(i,j)の拘束歪εr(i,j)を求める
εr(i,j)=εc(i,j)−εt(i,j) (12)
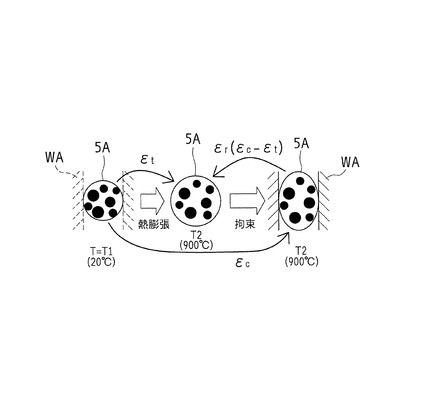
ここで、図5を参照して、拘束歪εrについて説明する。図5は、本発明に係る「拘束歪」の考え方を示す概念図である。円板状の測定対象物5Aは、左右両端が壁WAに移動を拘束された状態で、第1温度T1(例えば、20℃)から第2温度T2(例えば、900℃)まで加熱されて熱膨張する。この場合に、温度上昇に伴って、測定対象物5Aは熱膨張するが、左右両端が壁WAに移動を拘束されているため、右側の図で示すように、第2温度T2まで加熱された状態では、縦方向に長い長円(又は、楕円)状の形状となる。
【0064】
本願発明に係る歪測定装置100は、図5の左端の図である初期状態と、図5の右側の図である加熱後の状態との間に、図5の中央の図で示す、測定対象物5Aが第2温度T2で自由膨張した状態を想定している。そして、拘束歪εrを、右端の図で示す状態における歪みである実歪εcと、中央の図で示す状態である熱自由歪εtとの差と定義して、この拘束歪εrを、測定対象物5Aに作用する応力に関連する情報として使用するものである。換言すれば、本願発明は、測定対象物5Aの加熱、冷却の繰り返しによる測定対象物5Aの寿命に影響する上記応力を、拘束歪εrを用いて推定することをその目的としている。
【0065】
−歪測定装置(コンピュータ1)の動作−
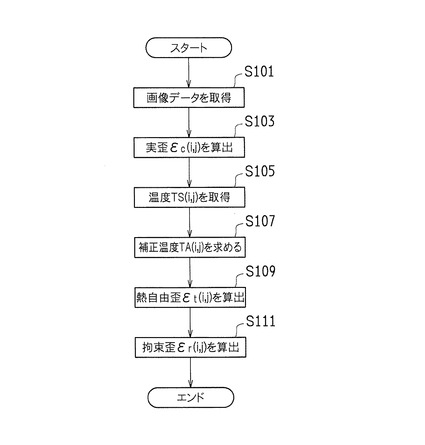
次に、図6を参照して、本発明に係る歪測定装置100(主に、コンピュータ1)の動作を説明する。図6は、図4に示す歪測定装置100の動作の一例を示すフローチャートである。まず、画像取得部11によって、第1ステレオカメラ2及び第2ステレオカメラ3から、それぞれ、第1ステレオ画像PS1、及び、第2ステレオ画像PS2が取得される(ステップS101)。そして、実歪算出部12によって、ステップS101で取得された第1ステレオ画像PS1、及び、第2ステレオ画像PS2に基づいて、測定対象物5の正面51における実歪εc(i,j)が求められる(ステップS103)。
【0066】
次いで、温度取得部13によって、サーモビュア4で検出された各格子点(i,j)に対応する位置の温度TSijが取得される(ステップS105)。次に、温度補正部15によって、各格子点(i,j)の温度TS(i,j)が補正されて、補正後の温度TA(i,j)が求められる(ステップS107)。そして、熱自由歪算出部17によって、ステップS107で補正された温度TA(i,j)に基づいて、熱自由歪εt(i,j)が求められる(ステップS109)。次に、拘束歪算出部18によって、ステップS103で求められた実歪εc(i,j)からステップS109で求められた熱自由歪εt(i,j)を減じた差として拘束歪εr(i,j)が求められて(ステップS111)、処理が終了される。
【0067】
上述のように、第1ステレオカメラ2によって測定対象物5の第1ステレオ画像PS1が生成される。また、第1ステレオカメラ2と離間した位置に配設された第2ステレオカメラ3によって、測定対象物5の第2ステレオ画像PS2が生成される。そして、第1ステレオ画像PS1及び第2ステレオ画像PS2から測定対象物5の三次元形状が求められて、実歪εc(i,j)が求められる。また、サーモビュア4によって、測定対象物5の温度分布Tijが検出され、検出された温度分布Tijから熱自由歪εt(i,j)が求められる。更に、求められた実歪εc(i,j)から、求められた熱自由歪εt(i,j)を減じた差が、拘束歪εr(i,j)として求められるため、拘束歪εr(i,j)を容易に測定することができる。
【0068】
すなわち、本発明に係る歪測定装置100は、測定対象物5の実際の歪である実歪εc(i,j)から、測定対象物5の熱による自由膨張の歪である熱自由歪εt(i,j)を減じた差を「拘束歪εr(i,j)」として定義して、測定対象物5の熱疲労に伴う寿命を評価する指標として、この「拘束歪εr(i,j)」を測定するものである。そして、第1ステレオカメラ2及び第1ステレオカメラ3によって、それぞれ、生成された第1ステレオ画像PS1及び第2ステレオ画像PS2から実歪εc(i,j)が求められ、サーモビュア4によって検出された測定対象物5の温度分布Tijから熱自由歪εt(i,j)が求められるため、実歪εc(i,j)から熱自由歪εt(i,j)を減じた差である「拘束歪εr(i,j)」を容易に測定することができるのである。
【0069】
−線膨張係数測定方法−
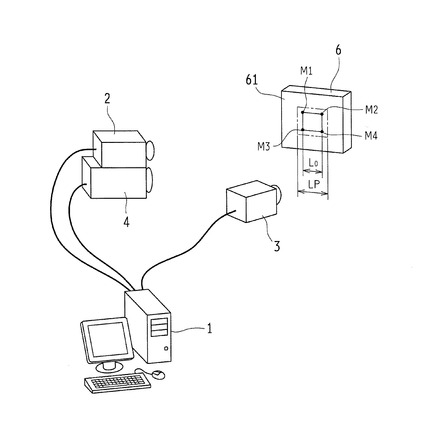
次に、図7〜図9を参照して、本発明に係る線膨張係数測定方法について説明する。図7は、本発明に係る線膨張係数測定方法の一例を示す構成図である。図7に示すように、本発明に係る線膨張係数測定方法は、上述の歪測定装置100を用いて温度Tと線膨張係数α(T)との関係を求めるものである。図1に示す測定対象物5に換えて、図7に示すように、テストピース6を、図1に示す測定対象物5と略同一の位置に配置される。
【0070】
テストピース6は、測定対象物5と同一の材料からなり、その正面61に、4つのマークM1〜M4が描かれている。マークM1〜M4は、正方形の4つの各頂点に対応する位置に描かれており、初期温度T0(例えば、20℃)において、上記正方形の一辺の長さはL0である。そして、テストピース6は、予め設定された温度TP(例えば、第1温度T1=20℃から第2温度T2=900℃までの間の10℃間隔の温度)に均一に加熱されて、図1に示す測定対象物5と略同一の位置に配置される。この工程が、特許請求の範囲に記載の「均一加熱工程」に相当する。
【0071】
次に、第1ステレオカメラ2によって、テストピース6の正面61に描かれた2つのマーク間(ここでは、マークM3とマークM4との間)の距離LPが求められる。この工程が、特許請求の範囲に記載の「測定工程」に相当する。なお、距離LPは、温度TPが設定される度に(例えば、第1温度T1=20℃から第2温度T2=900℃までの間の10℃間隔の温度に設定される度に)、求められる。そして、求められた2つのマーク間の距離LPから、次の(13)式によって線膨張係数αが求められる。この工程が、特許請求の範囲に記載の「係数算出工程」に相当する。
【0072】
α=(LP−L0)/L0 (13)
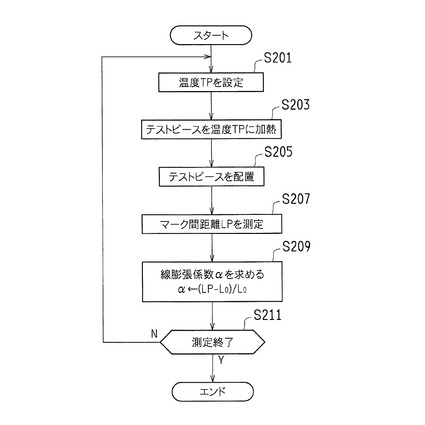
次に、図8を参照して本発明に係る線膨張係数測定方法の手順を説明する。図8は、本発明に係る線膨張係数測定方法の処理手順の一例を示すフローチャートである。まず、テストピース6を加熱する温度TPが設定される(ステップS201)。そして、テストピース6がステップS201で設定された温度TPに均一に加熱される(ステップS203)。
【0073】
次いで、ステップS203で温度TPに均一に加熱されたテストピース6が図1に示す測定対象物5と略同一の位置に配置される(ステップS205)。ここで、ステップS203及びステップS205が、特許請求の範囲に記載の「均一加熱工程」に相当する。次に、テストピース6の2つのマーク間(ここでは、マークM3とマークM4との間)の距離LPが求められる(ステップS207)。このステップS207が、特許請求の範囲に記載の「測定工程」に相当する。そして、上記(13)式によって、線膨張係数αが求められる(ステップS209)。このステップS209が、特許請求の範囲に記載の「係数算出工程」に相当する。次に、測定を終了するか否かの判定が行われる(ステップS211)。この判定は、例えば、20℃から900℃までの間の10℃間隔の温度について、全て、線膨張係数αの測定が完了した場合に、終了すると判定される。ステップS211でYESの場合には、処理が終了される。ステップS211でNOの場合には、処理がステップS201に戻され、ステップS201以降の処理が繰り返し実行される。
【0074】
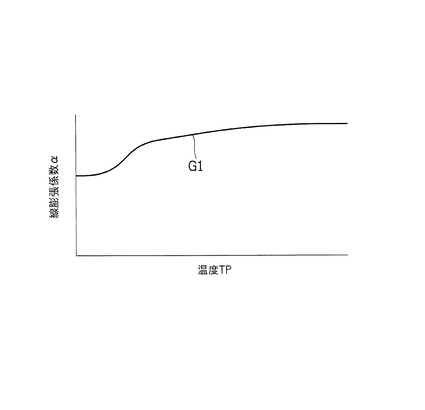
図9は、線膨張係数αの測定結果の一例を示すグラフG1である。横軸は、テストピース6(又は、測定対象物5)の温度TPであって、縦軸は、線膨張係数αである。
【0075】
このようにして、測定対象物5と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピース6が、予め設定された温度TPに均一に加熱されて、測定対象物3と略同一の位置に配置される。そして、テストピース6の2つのマークM3、M4間の距離LPが求められ、求められた2つのマークM3、M4間の距離LPから線膨張係数αが求められるため、上記の歪測定装置100を用いて、容易に測定対象物5の温度TPと線膨張係数αとの関係を求めることができる。
【0076】
本実施形態では、第1ステレオカメラ2を用いて距離LPが求められる場合について説明するが、第1ステレオカメラ2及び第2ステレオカメラ3の少なくとも一方を用いて距離LPを求める形態であればよい。
【0077】
−サーモビュアの補正係数測定方法−
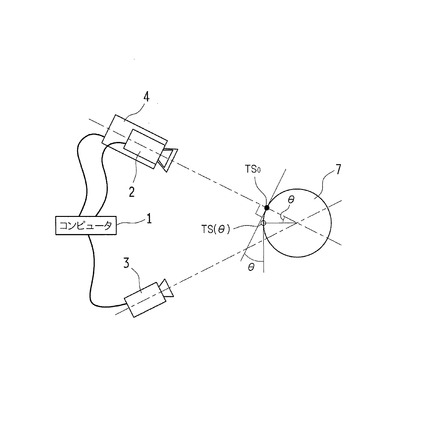
次に、図10〜図12を参照して、本発明に係るサーモビュア4の補正係数β(θ)の測定方法について説明する。図10は、本発明に係るサーモビュア4の補正係数β(θ)の測定方法の一例を示す構成図である。図10に示すように、本発明に係るサーモビュア4の補正係数β(θ)の測定方法は、上述の歪測定装置100を用いて、サーモビュア4から測定対象物5に向かう視線方向と直交する面と測定対象物5の表面とのなす角である傾斜角θと補正係数β(θ)との関係を求めるものである。図1に示す測定対象物5に換えて、図10に示すように、テストピース7を、図1に示す測定対象物5と略同一の位置に配置される。
【0078】
テストピース7は、測定対象物5と同一の材料からなり、円柱形に形成されている。そして、テストピース7は、予め設定された温度TQ(例えば、600℃)に均一に加熱されて、図1に示す測定対象物5と略同一の位置に配置される。この工程が、特許請求の範囲に記載の「均一加熱工程」に相当する。
【0079】
次に、サーモビュア4によって、テストピース6の表面の温度TS(θ)の分布が検出される。この工程が、特許請求の範囲に記載の「検出工程」に相当する。ここで、傾斜角θは、サーモビュア4から測定対象物5に向かう視線方向と直交する面とテストピース6の表面とのなす角である。そして、検出された温度TS(θ)の分布から、次の(14)式によって補正係数β(θ)が求められる。この工程が、特許請求の範囲に記載の「係数算出工程」に相当する。
【0080】
β(θ)=TS(θ)/TQ (14)
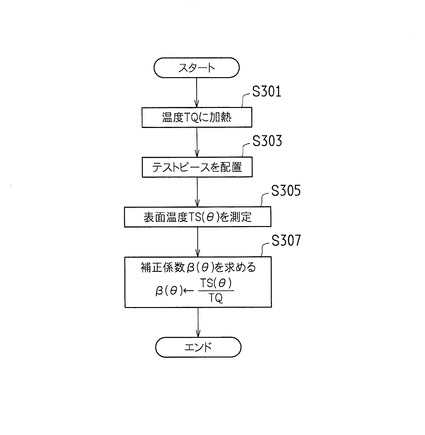
次に、図11を参照して本発明に係るサーモビュア4の補正係数β(θ)の測定方法の手順を説明する。図11は、本発明に係るサーモビュア4の補正係数β(θ)の測定方法における処理手順の一例を示すフローチャートである。まず、テストピース7が温度TQに均一に加熱される(ステップS301)。
【0081】
次いで、ステップS301で温度TQに均一に加熱されたテストピース7が図1に示す測定対象物5と略同一の位置に配置される(ステップS303)。ここで、ステップS301及びステップS303が、特許請求の範囲に記載の「均一加熱工程」に相当する。次に、サーモビュア4によって、テストピース7の表面における温度TS(θ)の分布が検出される(ステップS305)。このステップS305が、特許請求の範囲に記載の「検出工程」に相当する。そして、上記(14)式によって、サーモビュア4の補正係数β(θ)が求められて(ステップS307)、処理が終了される。このステップS307が、特許請求の範囲に記載の「係数算出工程」に相当する。
【0082】
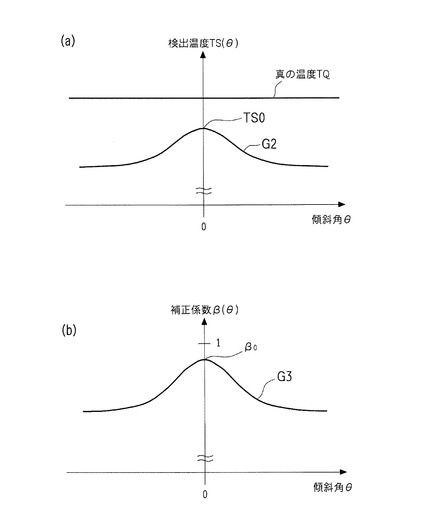
図12は、サーモビュア4の補正係数β(θ)の測定結果の一例を示すグラフである。図12(a)は、傾斜角θと検出温度TS(θ)との関係を示すグラフG2であり、図12(b)は、傾斜角θと補正係数β(θ)との関係を示すグラフG3である。図12(a)のグラフG2に示すように、傾斜角θの絶対値が大きい程、検出温度TS(θ)は低下する。また、図12(b)のグラフG3に示すように、傾斜角θの絶対値が大きい程、補正係数β(θ)は小さくなる。
【0083】
このようにして、測定対象物5と同一の材料からなる円柱形のテストピース7が、予め設定された温度TQに均一に加熱されて、測定対象物5と略同一の位置に配置される。そして、サーモビュア4によってテストピース7の表面における温度TS(θ)の分布が検出され、検出されたテストピース7の表面における温度TS(θ)の分布から補正係数β(θ)が求められるため、歪測定装置100を用いて、容易に測定対象物5の傾斜角θと補正係数β(θ)との関係を求めることができる。
【0084】
本実施形態では、テストピース7が円柱形に形成されている場合について説明するが、テストピース7がその他の形状に形成されている形態でもよい。例えば、テストピース7が、平板状に形成されており、y軸方向(図10の紙面と直交する方向)と平行なテストピース7の中心軸を中心として、テストピース7を回転させて、傾斜角θを変化させながら、傾斜角θ毎のテストピース7の表面における温度TS(θ)を求める形態でもよい。この場合には、傾斜角θと補正係数β(θ)との関係を更に正確に求めることができる。
【0085】
−他の実施形態−
本実施形態では、歪測定装置100がコンピュータ1において実歪算出部12、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18の機能部として構成されている場合について説明したが、実歪算出部12、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18の機能部のうち、少なくとも1つの機能部が、電子回路等のハードウェアで構成されている形態でもよい。
【産業上の利用可能性】
【0086】
本発明は、測定対象物の熱歪を測定する歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法に利用することができる。
【符号の説明】
【0087】
100 歪測定装置
1 コンピュータ
11 画像取得部
12 実歪算出部(実歪算出手段)
13 温度取得部
14 補正係数記憶部(補正係数記憶手段)
15 温度補正部(温度補正手段)
16 膨張係数記憶部(膨張係数記憶手段)
17 熱自由歪算出部(熱自由歪算出手段)
18 拘束歪算出部(拘束歪算出手段)
2 第1ステレオカメラ
3 第2ステレオカメラ
4 サーモビュア
5 測定対象物
6 テストピース
7 テストピース
【技術分野】
【0001】
本発明は、測定対象物の熱歪を測定する歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法に関する。
【背景技術】
【0002】
車両に搭載されるエキゾーストマニホールド等のエンジンの排気系部品においては、エンジンから排出される排気ガスが高温になるため、熱歪によって応力が作用して、寿命に影響することが知られている。そこで、エンジンの排気系部品の寿命を評価するためには、歪みを測定する必要があるところ、従来、三次元形状を測定する種々の技術が提案されている。
【0003】
例えば、2台のステレオカメラの撮像領域に配置された測定対象物にパターンを投影し、上記2台のステレオカメラによって、それぞれ、測定対象物のパターン付きステレオ画像を取得し、ステレオ画像処理することによって測定対象物の三次元形状を測定する三次元形状測定装置が開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−270915号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の三次元形状測定装置では、測定対象物の歪みを測定することはできるものの、熱歪によって発生する応力を求めることはできない。すなわち、例え、エンジンの排気系部品が高温になったときであっても、エンジンの排気系部品が自由膨張する場合には、上記応力は作用せず、上記応力は、エンジンとの接続部等における外部からの拘束を受けること、及び、エンジンの排気系部品の温度分布等によって作用するものであるからである。
【0006】
すなわち、上記三次元形状測定装置では、測定対象物の寿命に影響する上記応力(熱歪によって発生する応力)に対応する歪(この歪を、本願においては、「拘束歪」という)を測定することはできない。
【0007】
本発明は、上記課題に鑑みてなされたものであって、拘束歪を容易に測定することの可能な歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る歪測定装置は、以下のように構成されている。
【0009】
すなわち、本発明に係る歪測定装置は、測定対象物の熱歪を測定する歪測定装置であって、前記測定対象物の第1ステレオ画像を生成する第1ステレオカメラと、前記第1ステレオカメラと離間した位置に配設され、前記測定対象物の第2ステレオ画像を生成する第2ステレオカメラと、前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状を求めて、前記実歪を求める実歪算出手段と、前記測定対象物の温度分布を検出するサーモビュアと、前記サーモビュアによって検出された温度分布から前記熱自由歪を求める熱自由歪算出手段と、前記実歪算出手段によって求められた前記実歪から、前記熱自由歪算出手段によって求められた前記熱自由歪を減じた差を、拘束歪として求める拘束歪算出手段と、を備えることを特徴としている。
【0010】
かかる構成を備える歪測定装置によれば、第1ステレオカメラによって前記測定対象物の第1ステレオ画像が生成される。また、前記第1ステレオカメラと離間した位置に配設された第2ステレオカメラによって、前記測定対象物の第2ステレオ画像が生成される。そして、前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状が求められて、前記実歪が求められる。また、サーモビュアによって、前記測定対象物の温度分布が検出され、検出された温度分布から前記熱自由歪が求められる。更に、求められた前記実歪から、求められた前記熱自由歪を減じた差が、拘束歪として求められるため、拘束歪を容易に測定することができる。
【0011】
すなわち、本発明に係る歪測定装置は、測定対象物の実際の歪である実歪から、測定対象物の熱による自由膨張の歪である熱自由歪を減じた差を「拘束歪」として定義して、測定対象物の熱疲労に伴う寿命を評価する指標として、この「拘束歪」を測定するものである。そして、第1ステレオカメラ及び第2ステレオカメラによって、それぞれ、生成された前記第1ステレオ画像及び前記第2ステレオ画像から前記実歪が求められ、サーモビュアによって検出された前記測定対象物の温度分布から前記熱自由歪が求められるため、前記実歪から前記熱自由歪を減じた差である「拘束歪」を容易に測定することができるのである。
【0012】
また、本発明に係る歪測定装置は、前記サーモビュアが、前記第1ステレオカメラ又は前記第2ステレオカメラと近接して配置されていることが好ましい。
【0013】
かかる構成を備える歪測定装置によれば、前記サーモビュアが、前記第1ステレオカメラ又は前記第2ステレオカメラと近接して配置されているため、「拘束歪」を更に容易に測定することができる。
【0014】
すなわち、前記サーモビュアと近接配置されているカメラを基準として実歪を測定することによって、前記実歪を求める格子点と、前記熱自由歪を求める格子点との位置合わせが容易となるため、「拘束歪」を更に容易に測定することができるのである。
【0015】
また、本発明に係る歪測定装置は、前記測定対象物の線膨張係数と前記測定対象物の温度とを対応付けて記憶する膨張係数記憶手段を更に備え、前記熱自由歪算出手段が、前記サーモビュアによって検出された温度分布に含まれる各温度に対応する線膨張係数を、前記膨張係数記憶手段から読み出して、前記熱自由歪を求めることが好ましい。
【0016】
かかる構成を備える歪測定装置によれば、膨張係数記憶手段に、前記測定対象物の線膨張係数と前記測定対象物の温度とが対応付けて記憶されており、前記サーモビュアによって検出された温度分布に含まれる各温度に対応する線膨張係数(図9参照)が、前記膨張係数記憶手段から読み出されて、前記熱自由歪が求められるため、前記熱自由歪を容易に求めることができる。
【0017】
また、本発明に係る歪測定装置は、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角に対応付けて、前記サーモビュアによって検出された温度分布に含まれる各温度を補正する補正係数を記憶する補正係数記憶手段と、前記実歪算出手段によって求められた前記測定対象物の三次元形状から前記傾斜角を求め、求められた傾斜角に対応する補正係数を前記補正係数記憶手段から読み出して、読み出された補正係数を用いて、前記サーモビュアによって検出された温度分布を補正する温度補正手段とを備え、前記熱自由歪算出手段が、前記温度補正手段によって補正された温度分布から前記熱自由歪を求めることが好ましい。
【0018】
かかる構成を備える歪測定装置によれば、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角に対応付けて、前記サーモビュアによって検出された温度分布に含まれる各温度を補正する補正係数が、補正係数記憶手段に記憶されており、前記測定対象物の三次元形状から前記傾斜角が求められ、求められた傾斜角に対応する補正係数(図12参照)が前記補正係数記憶手段から読み出されて、読み出された補正係数を用いて、前記サーモビュアによって検出された温度分布が補正される。そして、補正された温度分布から前記熱自由歪が求められるため、前記熱自由歪を正確に且つ容易に求めることができる。
【0019】
また、本発明に係る線膨張係数測定方法は、以下のように構成されている。
【0020】
すなわち、本発明に係る線膨張係数測定方法は、上記いずれかの歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を求める線膨張係数測定方法であって、前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、前記テストピースに描かれた2つのマーク間の距離を前記第1ステレオカメラ及び前記第2ステレオカメラの少なくとも一方を用いて求める測定工程と、前記測定工程において求められた2つのマーク間の距離から線膨張係数を求める係数算出工程と、を繰り返し実行することによって、前記測定対象物の温度と線膨張係数との関係を求めることを特徴としている。
【0021】
かかる構成を備える線膨張係数測定方法によれば、前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースが、予め設定された温度に均一に加熱されて、前記測定対象物と略同一の位置に配置される。そして、前記テストピースに描かれた2つのマーク間の距離が求められ、求められた2つのマーク間の距離から線膨張係数が求められるため、上記いずれかの歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を容易に求めることができる(図7〜図9参照)。
【0022】
更に、本発明に係るサーモビュアの補正係数測定方法は、以下のように構成されている。
【0023】
すなわち、本発明に係るサーモビュアの補正係数測定方法は、上記いずれかの歪測定装置を用いて、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角と前記サーモビュアの補正係数との関係を求めるサーモビュアの補正係数測定方法であって、前記測定対象物と同一の材料からなり、円柱形のテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、前記サーモビュアによって前記テストピースの表面の温度分布を検出する検出工程と、前記検出工程において検出された前記テストピースの表面の温度分布から補正係数を求める係数算出工程と、を実行することによって、前記測定対象物の傾斜角と補正係数との関係を求めることを特徴としている。
【0024】
かかる構成を備えるサーモビュアの補正係数測定方法によれば、前記測定対象物と同一の材料からなる円柱形のテストピースが、予め設定された温度に均一に加熱されて、前記測定対象物と略同一の位置に配置される。そして、前記サーモビュアによって前記テストピースの表面の温度分布が検出され、検出された前記テストピースの表面の温度分布から補正係数が求められるため、上記いずれかの歪測定装置を用いて、前記測定対象物の傾斜角と補正係数との関係を容易に求めることができる(図10〜図12参照)。
【発明の効果】
【0025】
本発明に係る歪測定装置によれば、第1ステレオカメラによって前記測定対象物の第1ステレオ画像が生成される。また、前記第1ステレオカメラと離間した位置に配設された第2ステレオカメラによって、前記測定対象物の第2ステレオ画像が生成される。そして、前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状が求められて、前記実歪が求められる。また、サーモビュアによって、前記測定対象物の温度分布が検出され、検出された温度分布から前記熱自由歪が求められる。更に、求められた前記実歪から、求められた前記熱自由歪を減じた差が、拘束歪として求められるため、拘束歪を容易に測定することができる。
【0026】
また、本発明に係る線膨張係数測定方法によれば、前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースが、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置される。そして、前記テストピースに描かれた2つのマーク間の距離が求められ、求められた2つのマーク間の距離から線膨張係数が求められるため、上記歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を容易に求めることができる。
【0027】
更に、本発明に係るサーモビュアの補正係数測定方法によれば、前記測定対象物と同一の材料からなる円柱形のテストピースが、予め設定された温度に均一に加熱されて、前記測定対象物と略同一の位置に配置される。そして、前記サーモビュアによって前記テストピースの表面の温度が測定され、測定された前記テストピースの表面の温度から補正係数が求められるため、上記歪測定装置を用いて、前記測定対象物の傾斜角と補正係数との関係を求容易にめることができる。
【図面の簡単な説明】
【0028】
【図1】本発明に係る歪測定装置の一例を示す構成図である。
【図2】図1に示す歪測定装置の平面図及び側面図である。
【図3】図1に示す測定対象物の正面に描かれた格子の一例を示す図である。
【図4】図1にコンピュータの機能構成の一例を示す機能構成図である。
【図5】本発明に係る「拘束歪」の考え方を示す概念図である。
【図6】図4に示す歪測定装置の動作の一例を示すフローチャートである。
【図7】本発明に係る線膨張係数測定方法の一例を示す構成図である。
【図8】本発明に係る線膨張係数測定方法の処理手順の一例を示すフローチャートである。
【図9】線膨張係数の測定結果の一例を示すグラフである。
【図10】本発明に係るサーモビュアの補正係数測定方法の一例を示す構成図である。
【図11】本発明に係るサーモビュアの補正係数測定方法における処理手順の一例を示すフローチャートである。
【図12】サーモビュアの補正係数測定結果の一例を示すグラフである。
【発明を実施するための形態】
【0029】
以下、本発明の実施形態を、図面を参照して説明する。
【0030】
−歪測定装置のハード構成−
まず、図1、図2を参照して、本発明に係る歪測定装置の構成について説明する。図1は、本発明に係る歪測定装置100の一例を示す構成図である。図2は、図1に示す歪測定装置100の平面図及び側面図である。図2(a)は、図1に示す歪測定装置100の平面図であり、図2(b)は、図1に示す歪測定装置100の側面図である。
【0031】
歪測定装置100は、測定対象物5の実際の歪である実歪εcから、測定対象物5の熱による自由膨張の歪である熱自由歪εtを減じた差を拘束歪εrとして測定する装置であって、図1に示すように、コンピュータ1、第1ステレオカメラ2、第2ステレオカメラ3、及び、サーモビュア4を備えている。また、第1ステレオカメラ2、第2ステレオカメラ3、及び、サーモビュア4の視界の略中心位置には、測定対象物5が配置されている。なお、ここでは、測定対象物5は、長方形状の板状体であって、その左右の両端は壁Wによって熱膨張が拘束されている。また、測定対象物5は、図略の熱源によって、その温度が第1温度T1(例えば、20℃)から第2温度T2(例えば、900℃)まで加熱される。本実施形態においては、便宜上、測定対象物5のz軸方向の変形は考えない(測定対象としない)ものとする。
【0032】
測定対象物5の第1ステレオカメラ2(第2ステレオカメラ3、及び、サーモビュア4)側の正面51には、図1に示すように格子線が描かれている。図3は、図1に示す測定対象物5の正面51に描かれた格子の一例を示す図である。図3に示すように、測定対象物5の正面51に描かれた格子線は、x軸方向にN個(例えば、50個)、y軸方向にM個(例えば、10個)の領域に正面51を均等に分割している。ここでは、各格子を(i,j)で表す。添え字iは、x軸方向の格子の順番を表し、左端が「1」であり、右端が「N」である。同様に、添え字jは、y軸方向の格子の順番を表し、上端が「1」であり、下端が「M」である。また、以下の説明においては、各格子点(i,j)に対応する正面51の温度を、温度T(i,j)と表記する。更に、各格子点(i,j)に対応する正面51の実歪εc、熱自由歪εt、及び、拘束歪εrを、それぞれ、実歪εc(i,j)、熱自由歪εt(i,j)、及び、拘束歪εr(i,j)と表記する。ここで、添え字iは、1からNまでのいずれかの整数であり、添え字jは、1からMまでのいずれかの整数である。
【0033】
コンピュータ1は、いわゆるパーソナルコンピュータ等からなり、歪測定装置100全体の動作を制御するものであって、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等を備えている。ROMは、種々の制御プログラム等を記憶する。CPUは、ROMに記憶された種々の制御プログラムを読み出して各種処理を実行する。RAMは、CPUでの演算結果等を一時的に記憶するメモリである。
【0034】
また、コンピュータ1は、操作入力部、表示部、HDD(Hard disk drive)等を備えている。操作入力部は、外部からの操作を受け付けるものであって、キーボード、マウス等からなる。表示部は、LCD(Liquid Crystal Display)等からなり、CPUによる演算結果等を外部から視認可能に表示するものである。HDDは、種々のデータを記憶するものである。
【0035】
第1ステレオカメラ2は、図2(b)に示すように、サーモビュア4の上に載置され、測定対象物5の第1ステレオ画像PS1を生成するカメラである。第1ステレオカメラ2によって生成された第1ステレオ画像PS1は、コンピュータ1(図4に示す画像取得部11)へ出力される。なお、第1ステレオ画像PS1は、後述する実歪算出部12によって実歪εc(i,j)を求めるときの基準とされる画像である。
【0036】
第2ステレオカメラ3は、第1ステレオカメラ2と離間した位置に配設され、測定対象物5の第2ステレオ画像PS2を生成するカメラである。第2ステレオカメラ3によって生成された第2ステレオ画像PS2は、コンピュータ1(図4に示す画像取得部11)へ出力される。ここで、第2ステレオカメラ3は、図2(a)に示すように、測定対象物5の中心線CLについて第1ステレオカメラ2と線対称となる位置に配置されている。
【0037】
サーモビュア4は、第1ステレオカメラ2の下に配設され、測定対象物5の温度分布を検出する装置である。サーモビュア4によって検出された温度分布を示す情報は、コンピュータ1(図4に示す温度取得部13)へ出力される。
【0038】
上述のように、実歪εc(i,j)を求めるときの基準とされる第1ステレオ画像PS1を生成する第1ステレオカメラ2が、サーモビュア4の上側に載置されているため、「拘束歪εr(i,j)」を更に容易に測定することができる。
【0039】
すなわち、サーモビュア4と近接配置されている第1ステレオカメラ2を基準として実歪εc(i,j)を測定することによって、実歪εc(i,j)を求める格子点(i,j)と、熱自由歪εt(i,j)を求める格子点(i,j)との位置合わせが容易となるため、「拘束歪εr(i,j)」を更に容易に測定することができるのである。
【0040】
本実施形態では、第1ステレオカメラ2が、サーモビュア4の上側に載置されている場合について説明するが、第1ステレオカメラ2又は第2ステレオカメラ3がサーモビュア4と近接して配置されている形態であればよい。例えば、第2ステレオカメラ3がサーモビュア4の真横に配置されている形態でもよい。この場合には、第2ステレオカメラ3によって生成される第2ステレオ画像PS2が、後述する実歪算出部12によって実歪εc(i,j)を求めるときの基準となる画像として用いられる。
【0041】
−コンピュータの機能構成−
次に、図4を参照してコンピュータ1の構成について説明する。図4は、図1にコンピュータの機能構成の一例を示す機能構成図である。コンピュータ1は、ROM等に記憶された制御プログラムを読み出して実行することによって、画像取得部11、実歪算出部12、温度取得部13、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18等の機能部として機能する。ここで、実歪算出部12、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18は、本発明に係る歪測定装置100の一部に相当する。
【0042】
画像取得部11は、第1ステレオカメラ2によって生成された第1ステレオ画像PS1、及び、第2ステレオカメラ3によって生成された第2ステレオ画像PS2を取得する機能部である。
【0043】
実歪算出部12は、画像取得部11によって取得された第1ステレオ画像PS1及び第2ステレオ画像PS2に基づいて、測定対象物5の正面51における実歪εc(i,j)を求める機能部である。ここで、実歪算出部12は、特許請求の範囲に記載の「実歪算出手段」に相当する。
【0044】
具体的には、実歪算出部12は、画像取得部11によって取得された第1ステレオ画像PS1及び第2ステレオ画像PS2に基づいて、第1温度T1(例えば、20℃)及び第2温度T2(例えば、900℃)の、それぞれの場合に、測定対象物5の正面51における各格子点(i,j)の中心位置のx−y座標(x1ij、y1ij)及び(x2ij、y2ij)を求める。ここで、添え字iは、1からNのいずれかの整数であり、添え字jは、1からMのいずれかの整数である。このように、2つのステレオ画像に基づいて各格子点(i,j)の中心位置のx−y座標を求める方法は、公知である(“Image Correlation for Deformation and Shape Measurements : Basic Concepts, Theory and Applications”、Chapter4:Two-Dimensional and Three-Dimensional Computer Vision、P65-P80、著者:Sutton.M.A.、Orteu.J.、2009年4月出版、出版社:Springer、ISBN:9780387787466、及び、特開2009−270915号公報、特開2001−241928号公報参照)から、ここでは、その説明を省略する。
【0045】
次に、実歪算出部12は、第1温度T1及び第2温度T2の、それぞれの場合に、測定対象物5の正面51における各格子点(i,j)の中心位置の座標(x1ij、y1ij)及び(x2ij、y2ij)から、各格子点(i,j)における実歪εc(i,j)を、幅方向(x軸方向)の実歪εcx(i,j)、及び、高さ方向(y軸方向)の実歪εcy(i,j)として求める。幅方向の実歪εcx(i,j)は、例えば、次の(1)〜(4)式によって求められる。
【0046】
εcx(i,j)=ΔLx(i,j)/L1x(i,j) (1)
ΔLx(i,j)=L2x(i,j)−L1x(i,j) (2)
L1x(i,j)=((x1ij−x1(i−1)j)2+
(y1ij−y1(i−1)j)2)1/2 (3)
L2x(i,j)=((x2ij−x2(i−1)j)2+
(y2ij−y2(i−1)j)2)1/2 (4)
また、高さ方向の実歪εcy(i,j)は、例えば、次の(5)〜(8)式によって求められる。
【0047】
εcy(i,j)=ΔLy(i,j)/L1y(i,j) (5)
ΔLy(i,j)=L2y(i,j)−L1y(i,j) (6)
L1y(i,j)=((x1ij−x1i(j−1))2+
(y1ij−y1i(j−1))2)1/2 (7)
L2y(i,j)=((x2ij−x2i(j−1))2+
(y2ij−y2i(j−1))2)1/2 (8)
すなわち、実歪εc(i,j)は、第1温度T1から第2温度T2に変化した場合の、各格子点(i,j)の中心位置から隣接する格子点の中心位置との距離の変化(L1→L2)に基づいて求められる。
【0048】
より具体的には、幅方向の実歪εcx(i,j)は、第1温度T1から第2温度T2に変化した場合の、各格子点(i,j)の中心位置から左側に隣接する格子点の中心位置までの距離の変化(L1x→L2x)に基づいて求められる。また、高さ方向の実歪εcy(i,j)は、第1温度T1から第2温度T2に変化した場合の、各格子点(i,j)の中心位置から上側に隣接する格子点の中心位置までの距離の変化(L1y→L2y)に基づいて求められる。なお、以下の説明においては、幅方向の実歪εcx(i,j)及び高さ方向の実歪εcy(i,j)を、便宜上、実歪εc(i,j)と総称する。
【0049】
温度取得部13は、サーモビュア4によって検出された温度分布情報を取得する機能部である。また、温度取得部13は、取得した温度分布情報に基づいて、測定対象物5の正面51における各格子点(i,j)に対応する位置の温度Tijを求める。
【0050】
補正係数記憶部14は、サーモビュア4から測定対象物5に向かう視線方向と直交する面と測定対象物5の表面とのなす角である傾斜角θに対応付けて、サーモビュア4によって検出された温度分布に含まれる各温度を補正する補正係数β(θ)(図9参照)を記憶する機能部である。ここで、補正係数記憶部14は、特許請求の範囲に記載の「補正係数記憶手段」に相当する。
【0051】
具体的には、補正係数記憶部14は、ROM等にマップ又はLUT(ルックアップテーブル)として、傾斜角θに対応付けて補正係数β(θ)を記憶する。また、本実施形態においては、補正係数β(θ)は、図10〜図12を用いて後述する本発明に係るサーモビュア4の補正係数測定方法によって求められ、補正係数記憶部14に記憶されているものとする。
【0052】
温度補正部15は、実歪算出部12によって求められた測定対象物5の三次元形状から傾斜角θを求め、求められた傾斜角θに対応する補正係数β(θ)を補正係数記憶部14から読み出して、読み出された補正係数β(θ)を用いて、サーモビュア4によって検出された温度分布を補正する機能部である。ここで、温度補正部15は、特許請求の範囲に記載の「温度補正手段」に相当する。
【0053】
具体的には、温度補正部15は、次の(9)式によって、サーモビュア4によって検出された各格子点(i,j)の温度TS(i,j)を補正して、補正後の温度TA(i,j)を求める。
【0054】
TA(i,j)=TS(i,j)/β(i,j) (9)
ここで、β(i,j)は、各格子点(i,j)の傾斜角に対応する補正係数である。ただし、上述のように、本実施形態では、便宜上、測定対象物5のz軸方向の変形は考えない(測定対象としない)ため、傾斜角θは「0」として補正が行われる。
【0055】
上述のように、サーモビュア4から測定対象物5に向かう視線方向と直交する面と測定対象物5の表面とのなす角である傾斜角θに対応付けて、サーモビュア4によって検出された温度分布Tに含まれる各温度TS(i,j)を補正する補正係数β(θ)が、補正係数記憶部14に記憶されており、温度補正部15によって、測定対象物5の三次元形状から傾斜角θが求められ、求められた傾斜角θに対応する補正係数β(θ)(図12参照)が補正係数記憶部14から読み出されて、読み出された補正係数β(θ)を用いて、サーモビュア4によって検出された温度TS(i,j)が補正される。そして、補正された温度TA(i,j)から熱自由歪εt(i,j)が求められるため、熱自由歪εt(i,j)を正確に且つ容易に求めることができる。
【0056】
膨張係数記憶部16は、測定対象物5の線膨張係数αと測定対象物5の温度Tとを対応付けて記憶する機能部である。ここで、膨張係数記憶部16は、特許請求の範囲に記載の膨張係数記憶手段に相当する。
【0057】
具体的には、膨張係数記憶部16は、ROM等にマップ又はLUT(ルックアップテーブル)として、温度Tに対応付けて線膨張係数α(T)を記憶する。また、本実施形態においては、線膨張係数α(T)は、図7〜図9を用いて後述する本発明に係る線膨張係数測定方法によって求められ、膨張係数記憶部16に記憶されているものとする。
【0058】
熱自由歪算出部17は、サーモビュア4によって検出された測定対象物5の温度分布から熱自由歪εtを求める機能部である。熱自由歪算出部17は、特許請求の範囲に記載の「熱自由歪算出手段」に相当する。
【0059】
具体的には、熱自由歪算出部17は、サーモビュア4によって検出された温度分布に含まれる各格子点(i,j)の各温度T(i,j)に対応する線膨張係数α(T(i,j))を、膨張係数記憶部16から読み出して、次の(10)、(11)式によって熱自由歪εt(i,j)を、それぞれ、幅方向の熱自由歪εtx(i,j)、及び、高さ方向の熱自由歪εty(i,j)として求める。
【0060】
εtx(i,j)=(α(T(i,j))−α0)×L1x(i,j) (10)
εty(i,j)=(α(T(i,j))−α0)×L1y(i,j) (11)
ここで、α0は、測定対象物5の初期温度である第1温度T1における線膨張係数αの値である。また、(10)式のL1x(i,j)、及び、(11)式のL1y(i,j)は、それぞれ、上記(3)式、及び、上記(7)式で与えられる第1温度T1における測定対象物5の幅方向の格子間距離及び高さ方向の格子間距離である。なお、以下の説明においては、幅方向の熱自由歪εtx(i,j)及び高さ方向のεty(i,j)を、便宜上、熱自由歪εt(i,j)と総称する。
【0061】
上述のように、膨張係数記憶部16に、測定対象物5の線膨張係数α(T)と測定対象物5の温度Tとが対応付けて記憶されており、サーモビュア4によって検出された温度分布に含まれる各温度T(i,j)に対応する線膨張係数α(T(i,j))(図9参照)が、膨張係数記憶部16から読み出されて、熱自由歪εt(i,j)が求められるため、熱自由歪εt(i,j)を容易に求めることができる。
【0062】
拘束歪算出部18は、実歪算出部12によって求められた実歪εc(i,j)から、熱自由歪算出部17によって求められた熱自由歪εt(i,j)を減じた差を、拘束歪εr(i,j)として求める機能部である。ここで、拘束歪算出部18は、特許請求の範囲に記載の「拘束歪算出手段」に相当する。
【0063】
すなわち、拘束歪算出部18は、次の(12)式によって、各格子点(i,j)の拘束歪εr(i,j)を求める
εr(i,j)=εc(i,j)−εt(i,j) (12)
ここで、図5を参照して、拘束歪εrについて説明する。図5は、本発明に係る「拘束歪」の考え方を示す概念図である。円板状の測定対象物5Aは、左右両端が壁WAに移動を拘束された状態で、第1温度T1(例えば、20℃)から第2温度T2(例えば、900℃)まで加熱されて熱膨張する。この場合に、温度上昇に伴って、測定対象物5Aは熱膨張するが、左右両端が壁WAに移動を拘束されているため、右側の図で示すように、第2温度T2まで加熱された状態では、縦方向に長い長円(又は、楕円)状の形状となる。
【0064】
本願発明に係る歪測定装置100は、図5の左端の図である初期状態と、図5の右側の図である加熱後の状態との間に、図5の中央の図で示す、測定対象物5Aが第2温度T2で自由膨張した状態を想定している。そして、拘束歪εrを、右端の図で示す状態における歪みである実歪εcと、中央の図で示す状態である熱自由歪εtとの差と定義して、この拘束歪εrを、測定対象物5Aに作用する応力に関連する情報として使用するものである。換言すれば、本願発明は、測定対象物5Aの加熱、冷却の繰り返しによる測定対象物5Aの寿命に影響する上記応力を、拘束歪εrを用いて推定することをその目的としている。
【0065】
−歪測定装置(コンピュータ1)の動作−
次に、図6を参照して、本発明に係る歪測定装置100(主に、コンピュータ1)の動作を説明する。図6は、図4に示す歪測定装置100の動作の一例を示すフローチャートである。まず、画像取得部11によって、第1ステレオカメラ2及び第2ステレオカメラ3から、それぞれ、第1ステレオ画像PS1、及び、第2ステレオ画像PS2が取得される(ステップS101)。そして、実歪算出部12によって、ステップS101で取得された第1ステレオ画像PS1、及び、第2ステレオ画像PS2に基づいて、測定対象物5の正面51における実歪εc(i,j)が求められる(ステップS103)。
【0066】
次いで、温度取得部13によって、サーモビュア4で検出された各格子点(i,j)に対応する位置の温度TSijが取得される(ステップS105)。次に、温度補正部15によって、各格子点(i,j)の温度TS(i,j)が補正されて、補正後の温度TA(i,j)が求められる(ステップS107)。そして、熱自由歪算出部17によって、ステップS107で補正された温度TA(i,j)に基づいて、熱自由歪εt(i,j)が求められる(ステップS109)。次に、拘束歪算出部18によって、ステップS103で求められた実歪εc(i,j)からステップS109で求められた熱自由歪εt(i,j)を減じた差として拘束歪εr(i,j)が求められて(ステップS111)、処理が終了される。
【0067】
上述のように、第1ステレオカメラ2によって測定対象物5の第1ステレオ画像PS1が生成される。また、第1ステレオカメラ2と離間した位置に配設された第2ステレオカメラ3によって、測定対象物5の第2ステレオ画像PS2が生成される。そして、第1ステレオ画像PS1及び第2ステレオ画像PS2から測定対象物5の三次元形状が求められて、実歪εc(i,j)が求められる。また、サーモビュア4によって、測定対象物5の温度分布Tijが検出され、検出された温度分布Tijから熱自由歪εt(i,j)が求められる。更に、求められた実歪εc(i,j)から、求められた熱自由歪εt(i,j)を減じた差が、拘束歪εr(i,j)として求められるため、拘束歪εr(i,j)を容易に測定することができる。
【0068】
すなわち、本発明に係る歪測定装置100は、測定対象物5の実際の歪である実歪εc(i,j)から、測定対象物5の熱による自由膨張の歪である熱自由歪εt(i,j)を減じた差を「拘束歪εr(i,j)」として定義して、測定対象物5の熱疲労に伴う寿命を評価する指標として、この「拘束歪εr(i,j)」を測定するものである。そして、第1ステレオカメラ2及び第1ステレオカメラ3によって、それぞれ、生成された第1ステレオ画像PS1及び第2ステレオ画像PS2から実歪εc(i,j)が求められ、サーモビュア4によって検出された測定対象物5の温度分布Tijから熱自由歪εt(i,j)が求められるため、実歪εc(i,j)から熱自由歪εt(i,j)を減じた差である「拘束歪εr(i,j)」を容易に測定することができるのである。
【0069】
−線膨張係数測定方法−
次に、図7〜図9を参照して、本発明に係る線膨張係数測定方法について説明する。図7は、本発明に係る線膨張係数測定方法の一例を示す構成図である。図7に示すように、本発明に係る線膨張係数測定方法は、上述の歪測定装置100を用いて温度Tと線膨張係数α(T)との関係を求めるものである。図1に示す測定対象物5に換えて、図7に示すように、テストピース6を、図1に示す測定対象物5と略同一の位置に配置される。
【0070】
テストピース6は、測定対象物5と同一の材料からなり、その正面61に、4つのマークM1〜M4が描かれている。マークM1〜M4は、正方形の4つの各頂点に対応する位置に描かれており、初期温度T0(例えば、20℃)において、上記正方形の一辺の長さはL0である。そして、テストピース6は、予め設定された温度TP(例えば、第1温度T1=20℃から第2温度T2=900℃までの間の10℃間隔の温度)に均一に加熱されて、図1に示す測定対象物5と略同一の位置に配置される。この工程が、特許請求の範囲に記載の「均一加熱工程」に相当する。
【0071】
次に、第1ステレオカメラ2によって、テストピース6の正面61に描かれた2つのマーク間(ここでは、マークM3とマークM4との間)の距離LPが求められる。この工程が、特許請求の範囲に記載の「測定工程」に相当する。なお、距離LPは、温度TPが設定される度に(例えば、第1温度T1=20℃から第2温度T2=900℃までの間の10℃間隔の温度に設定される度に)、求められる。そして、求められた2つのマーク間の距離LPから、次の(13)式によって線膨張係数αが求められる。この工程が、特許請求の範囲に記載の「係数算出工程」に相当する。
【0072】
α=(LP−L0)/L0 (13)
次に、図8を参照して本発明に係る線膨張係数測定方法の手順を説明する。図8は、本発明に係る線膨張係数測定方法の処理手順の一例を示すフローチャートである。まず、テストピース6を加熱する温度TPが設定される(ステップS201)。そして、テストピース6がステップS201で設定された温度TPに均一に加熱される(ステップS203)。
【0073】
次いで、ステップS203で温度TPに均一に加熱されたテストピース6が図1に示す測定対象物5と略同一の位置に配置される(ステップS205)。ここで、ステップS203及びステップS205が、特許請求の範囲に記載の「均一加熱工程」に相当する。次に、テストピース6の2つのマーク間(ここでは、マークM3とマークM4との間)の距離LPが求められる(ステップS207)。このステップS207が、特許請求の範囲に記載の「測定工程」に相当する。そして、上記(13)式によって、線膨張係数αが求められる(ステップS209)。このステップS209が、特許請求の範囲に記載の「係数算出工程」に相当する。次に、測定を終了するか否かの判定が行われる(ステップS211)。この判定は、例えば、20℃から900℃までの間の10℃間隔の温度について、全て、線膨張係数αの測定が完了した場合に、終了すると判定される。ステップS211でYESの場合には、処理が終了される。ステップS211でNOの場合には、処理がステップS201に戻され、ステップS201以降の処理が繰り返し実行される。
【0074】
図9は、線膨張係数αの測定結果の一例を示すグラフG1である。横軸は、テストピース6(又は、測定対象物5)の温度TPであって、縦軸は、線膨張係数αである。
【0075】
このようにして、測定対象物5と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピース6が、予め設定された温度TPに均一に加熱されて、測定対象物3と略同一の位置に配置される。そして、テストピース6の2つのマークM3、M4間の距離LPが求められ、求められた2つのマークM3、M4間の距離LPから線膨張係数αが求められるため、上記の歪測定装置100を用いて、容易に測定対象物5の温度TPと線膨張係数αとの関係を求めることができる。
【0076】
本実施形態では、第1ステレオカメラ2を用いて距離LPが求められる場合について説明するが、第1ステレオカメラ2及び第2ステレオカメラ3の少なくとも一方を用いて距離LPを求める形態であればよい。
【0077】
−サーモビュアの補正係数測定方法−
次に、図10〜図12を参照して、本発明に係るサーモビュア4の補正係数β(θ)の測定方法について説明する。図10は、本発明に係るサーモビュア4の補正係数β(θ)の測定方法の一例を示す構成図である。図10に示すように、本発明に係るサーモビュア4の補正係数β(θ)の測定方法は、上述の歪測定装置100を用いて、サーモビュア4から測定対象物5に向かう視線方向と直交する面と測定対象物5の表面とのなす角である傾斜角θと補正係数β(θ)との関係を求めるものである。図1に示す測定対象物5に換えて、図10に示すように、テストピース7を、図1に示す測定対象物5と略同一の位置に配置される。
【0078】
テストピース7は、測定対象物5と同一の材料からなり、円柱形に形成されている。そして、テストピース7は、予め設定された温度TQ(例えば、600℃)に均一に加熱されて、図1に示す測定対象物5と略同一の位置に配置される。この工程が、特許請求の範囲に記載の「均一加熱工程」に相当する。
【0079】
次に、サーモビュア4によって、テストピース6の表面の温度TS(θ)の分布が検出される。この工程が、特許請求の範囲に記載の「検出工程」に相当する。ここで、傾斜角θは、サーモビュア4から測定対象物5に向かう視線方向と直交する面とテストピース6の表面とのなす角である。そして、検出された温度TS(θ)の分布から、次の(14)式によって補正係数β(θ)が求められる。この工程が、特許請求の範囲に記載の「係数算出工程」に相当する。
【0080】
β(θ)=TS(θ)/TQ (14)
次に、図11を参照して本発明に係るサーモビュア4の補正係数β(θ)の測定方法の手順を説明する。図11は、本発明に係るサーモビュア4の補正係数β(θ)の測定方法における処理手順の一例を示すフローチャートである。まず、テストピース7が温度TQに均一に加熱される(ステップS301)。
【0081】
次いで、ステップS301で温度TQに均一に加熱されたテストピース7が図1に示す測定対象物5と略同一の位置に配置される(ステップS303)。ここで、ステップS301及びステップS303が、特許請求の範囲に記載の「均一加熱工程」に相当する。次に、サーモビュア4によって、テストピース7の表面における温度TS(θ)の分布が検出される(ステップS305)。このステップS305が、特許請求の範囲に記載の「検出工程」に相当する。そして、上記(14)式によって、サーモビュア4の補正係数β(θ)が求められて(ステップS307)、処理が終了される。このステップS307が、特許請求の範囲に記載の「係数算出工程」に相当する。
【0082】
図12は、サーモビュア4の補正係数β(θ)の測定結果の一例を示すグラフである。図12(a)は、傾斜角θと検出温度TS(θ)との関係を示すグラフG2であり、図12(b)は、傾斜角θと補正係数β(θ)との関係を示すグラフG3である。図12(a)のグラフG2に示すように、傾斜角θの絶対値が大きい程、検出温度TS(θ)は低下する。また、図12(b)のグラフG3に示すように、傾斜角θの絶対値が大きい程、補正係数β(θ)は小さくなる。
【0083】
このようにして、測定対象物5と同一の材料からなる円柱形のテストピース7が、予め設定された温度TQに均一に加熱されて、測定対象物5と略同一の位置に配置される。そして、サーモビュア4によってテストピース7の表面における温度TS(θ)の分布が検出され、検出されたテストピース7の表面における温度TS(θ)の分布から補正係数β(θ)が求められるため、歪測定装置100を用いて、容易に測定対象物5の傾斜角θと補正係数β(θ)との関係を求めることができる。
【0084】
本実施形態では、テストピース7が円柱形に形成されている場合について説明するが、テストピース7がその他の形状に形成されている形態でもよい。例えば、テストピース7が、平板状に形成されており、y軸方向(図10の紙面と直交する方向)と平行なテストピース7の中心軸を中心として、テストピース7を回転させて、傾斜角θを変化させながら、傾斜角θ毎のテストピース7の表面における温度TS(θ)を求める形態でもよい。この場合には、傾斜角θと補正係数β(θ)との関係を更に正確に求めることができる。
【0085】
−他の実施形態−
本実施形態では、歪測定装置100がコンピュータ1において実歪算出部12、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18の機能部として構成されている場合について説明したが、実歪算出部12、補正係数記憶部14、温度補正部15、膨張係数記憶部16、熱自由歪算出部17、及び、拘束歪算出部18の機能部のうち、少なくとも1つの機能部が、電子回路等のハードウェアで構成されている形態でもよい。
【産業上の利用可能性】
【0086】
本発明は、測定対象物の熱歪を測定する歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法に利用することができる。
【符号の説明】
【0087】
100 歪測定装置
1 コンピュータ
11 画像取得部
12 実歪算出部(実歪算出手段)
13 温度取得部
14 補正係数記憶部(補正係数記憶手段)
15 温度補正部(温度補正手段)
16 膨張係数記憶部(膨張係数記憶手段)
17 熱自由歪算出部(熱自由歪算出手段)
18 拘束歪算出部(拘束歪算出手段)
2 第1ステレオカメラ
3 第2ステレオカメラ
4 サーモビュア
5 測定対象物
6 テストピース
7 テストピース
【特許請求の範囲】
【請求項1】
測定対象物の熱歪を測定する歪測定装置であって、
前記測定対象物の第1ステレオ画像を生成する第1ステレオカメラと、
前記第1ステレオカメラと離間した位置に配設され、前記測定対象物の第2ステレオ画像を生成する第2ステレオカメラと、
前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状を求めて、前記実歪を求める実歪算出手段と、
前記測定対象物の温度分布を検出するサーモビュアと、
前記サーモビュアによって検出された温度分布から前記熱自由歪を求める熱自由歪算出手段と、
前記実歪算出手段によって求められた前記実歪から、前記熱自由歪算出手段によって求められた前記熱自由歪を減じた差を、拘束歪として求める拘束歪算出手段と、を備えることを特徴とする歪測定装置。
【請求項2】
請求項1に記載の歪測定装置において、
前記サーモビュアは、前記第1ステレオカメラ又は前記第2ステレオカメラと近接して配置されていることを特徴とする歪測定装置。
【請求項3】
請求項1又は請求項2に記載の歪測定装置において、
前記測定対象物の線膨張係数と前記測定対象物の温度とを対応付けて記憶する膨張係数記憶手段を更に備え、
前記熱自由歪算出手段は、前記サーモビュアによって検出された温度分布に含まれる各温度に対応する線膨張係数を、前記膨張係数記憶手段から読み出して、前記熱自由歪を求めることを特徴とする歪測定装置。
【請求項4】
請求項1から請求項3のいずれか1つに記載の歪測定装置において、
前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角に対応付けて、前記サーモビュアによって検出された温度分布に含まれる各温度を補正する補正係数を記憶する補正係数記憶手段と、
前記実歪算出手段によって求められた前記測定対象物の三次元形状から前記傾斜角を求め、求められた傾斜角に対応する補正係数を前記補正係数記憶手段から読み出して、読み出された補正係数を用いて、前記サーモビュアによって検出された温度分布を補正する温度補正手段と、を備え、
前記熱自由歪算出手段は、前記温度補正手段によって補正された温度分布から前記熱自由歪を求めることを特徴とする歪測定装置。
【請求項5】
請求項1から請求項4のいずれか1つに記載の歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を求める線膨張係数測定方法であって、
前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、
前記テストピースに描かれた2つのマーク間の距離を前記第1ステレオカメラ及び前記第2ステレオカメラの少なくとも一方を用いて求める測定工程と、
前記測定工程において求められた2つのマーク間の距離から線膨張係数を求める係数算出工程と、を繰り返し実行することによって、前記測定対象物の温度と線膨張係数との関係を求めることを特徴とする線膨張係数測定方法。
【請求項6】
請求項1から請求項4のいずれか1つに記載の歪測定装置を用いて、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角と前記サーモビュアの補正係数との関係を求めるサーモビュアの補正係数測定方法であって、
前記測定対象物と同一の材料からなり、円柱形のテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、
前記サーモビュアによって前記テストピースの表面の温度分布を検出する検出工程と、
前記検出工程において検出された前記テストピースの表面の温度分布から補正係数を求める係数算出工程と、を実行することによって、前記測定対象物の傾斜角と補正係数との関係を求めることを特徴とするサーモビュアの補正係数測定方法。
【請求項1】
測定対象物の熱歪を測定する歪測定装置であって、
前記測定対象物の第1ステレオ画像を生成する第1ステレオカメラと、
前記第1ステレオカメラと離間した位置に配設され、前記測定対象物の第2ステレオ画像を生成する第2ステレオカメラと、
前記第1ステレオ画像及び前記第2ステレオ画像から前記測定対象物の三次元形状を求めて、前記実歪を求める実歪算出手段と、
前記測定対象物の温度分布を検出するサーモビュアと、
前記サーモビュアによって検出された温度分布から前記熱自由歪を求める熱自由歪算出手段と、
前記実歪算出手段によって求められた前記実歪から、前記熱自由歪算出手段によって求められた前記熱自由歪を減じた差を、拘束歪として求める拘束歪算出手段と、を備えることを特徴とする歪測定装置。
【請求項2】
請求項1に記載の歪測定装置において、
前記サーモビュアは、前記第1ステレオカメラ又は前記第2ステレオカメラと近接して配置されていることを特徴とする歪測定装置。
【請求項3】
請求項1又は請求項2に記載の歪測定装置において、
前記測定対象物の線膨張係数と前記測定対象物の温度とを対応付けて記憶する膨張係数記憶手段を更に備え、
前記熱自由歪算出手段は、前記サーモビュアによって検出された温度分布に含まれる各温度に対応する線膨張係数を、前記膨張係数記憶手段から読み出して、前記熱自由歪を求めることを特徴とする歪測定装置。
【請求項4】
請求項1から請求項3のいずれか1つに記載の歪測定装置において、
前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角に対応付けて、前記サーモビュアによって検出された温度分布に含まれる各温度を補正する補正係数を記憶する補正係数記憶手段と、
前記実歪算出手段によって求められた前記測定対象物の三次元形状から前記傾斜角を求め、求められた傾斜角に対応する補正係数を前記補正係数記憶手段から読み出して、読み出された補正係数を用いて、前記サーモビュアによって検出された温度分布を補正する温度補正手段と、を備え、
前記熱自由歪算出手段は、前記温度補正手段によって補正された温度分布から前記熱自由歪を求めることを特徴とする歪測定装置。
【請求項5】
請求項1から請求項4のいずれか1つに記載の歪測定装置を用いて、前記測定対象物の温度と線膨張係数との関係を求める線膨張係数測定方法であって、
前記測定対象物と同一の材料からなり、少なくとも2つの位置にマークが描かれたテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、
前記テストピースに描かれた2つのマーク間の距離を前記第1ステレオカメラ及び前記第2ステレオカメラの少なくとも一方を用いて求める測定工程と、
前記測定工程において求められた2つのマーク間の距離から線膨張係数を求める係数算出工程と、を繰り返し実行することによって、前記測定対象物の温度と線膨張係数との関係を求めることを特徴とする線膨張係数測定方法。
【請求項6】
請求項1から請求項4のいずれか1つに記載の歪測定装置を用いて、前記サーモビュアから前記測定対象物に向かう視線方向と直交する面と前記測定対象物の表面とのなす角である傾斜角と前記サーモビュアの補正係数との関係を求めるサーモビュアの補正係数測定方法であって、
前記測定対象物と同一の材料からなり、円柱形のテストピースを、予め設定された温度に均一に加熱して、前記測定対象物と略同一の位置に配置する均一加熱工程と、
前記サーモビュアによって前記テストピースの表面の温度分布を検出する検出工程と、
前記検出工程において検出された前記テストピースの表面の温度分布から補正係数を求める係数算出工程と、を実行することによって、前記測定対象物の傾斜角と補正係数との関係を求めることを特徴とするサーモビュアの補正係数測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−92448(P2013−92448A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234901(P2011−234901)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]