
歯当たり面検出装置
【課題】測定環境が変化しても歯当たり面を精度良く識別すること。
【解決手段】 塗料40が塗布された歯面42をカラーで撮像するカメラ12と、カラー画像52から歯面42の色特徴値54を特定する色特徴値特定処理16と、歯面42の各カラー値について色特徴値54との色差を算出することで色差データ56を生成する色差データ生成処理18と、色差データ56のヒストグラム58からしきい値62を算出すると共に当該色差データ56を二値化することで歯当たり面46を識別する歯当たり面識別処理20とを備えた。
【解決手段】 塗料40が塗布された歯面42をカラーで撮像するカメラ12と、カラー画像52から歯面42の色特徴値54を特定する色特徴値特定処理16と、歯面42の各カラー値について色特徴値54との色差を算出することで色差データ56を生成する色差データ生成処理18と、色差データ56のヒストグラム58からしきい値62を算出すると共に当該色差データ56を二値化することで歯当たり面46を識別する歯当たり面識別処理20とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歯車の歯当たりを評価する技術分野に関連し、特に、歯車の歯当たり面を画像処理により評価する技術に関する。
【背景技術】
【0002】
従来は、歯当たり面(かみ合わせ面)を含む歯面に光明丹等の顔料を主成分とする塗料を塗布し、歯車を回転させた後に、塗料のはがれ具合を目視で確認し、はがれ具合に応じて歯当たりの良否を判定していた。しかし、この従来例では、目視検査であるため、歯当たり面の良否判定についての定量化が困難であった。
【0003】
特許文献1には、白黒のカメラで歯当たり面を撮影し、濃淡画像(グレースケール)をしきい値で二値化することで、歯当たり面を抽出する手法が提案されている。そして、この従来例では、しきい値の算出及び二値化は、歯当たり面を含み歯先を含まない歯面上の画素値に基づいて行われている(段落0048から0049,図8及び図9)。
特許文献2には、カラーのカメラで撮影したRGB画像をRGB毎の濃淡画像とし、それぞれを二値化して二値化画像を重ね合わせることで、歯当たりの強度に応じた4段階の階調画像を得る手法が提案されている(第3頁右上欄から左下欄、図3(a))。この手法では、ラフな自然光下での処理が可能とされているが(第4頁左上欄)、結局、歯当たり面の良否の判定自体は人手で行われている(第3頁右下欄から第4頁左上欄、図2)。
特許文献3には、RGB画像をRGB毎の濃淡画像とし、さらに、G成分とB成分とを加算して反転し、R成分と加算することで、光明丹の微妙な付着状態が明確に輝度差として現れる濃淡画像を得る手法が提案されている(段落0016から0018、図2)。特に、ラップ段差部分と歯当たり面との輝度差をより明確にすることが図られている(段落0018、図6)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10-096621号公報
【特許文献2】特開平3-115829号公報
【特許文献3】特開2004-220244号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1記載の手法では、光明丹等の塗料の色彩に基づいた判定をすることができず、歯当たりによる光明丹の擦れの程度を良好に判定することができない。
上記特許文献2記載の手法では、光明丹等の塗料の色彩を反映させた画像を生成できるが、歯当たりの良否の判定を自動化することができない。
上記特許文献3記載の手法では、光明丹等の塗料の色彩が変化した場合であっても、RGBの各成分による同一の手法で判定するため、実際の塗料の色彩が変化すると、良否判定の精度が低下してしまう。特に、光明丹等の塗付量のばらつきや、塗付後の時間経過による色の変化や、照明の種類や、照度条件の変化による塗料の色味の変化等の測定環境のばらつきに対応できない。
【0006】
このように、上記従来例では、光明丹等の顔料を成分とする塗料を歯面に塗布しておき、かみ合わせて歯当たり面を擦ることで塗料の付着量及び色を変化させ、この色の変化に基づいて歯当たりの良否を自動的に判定しようとする。
[課題1]しかしながら、上記従来例では、測定環境にばらつきがあると、歯当たり面の擦れによる塗料の色彩の変化を精度良く識別することができない、という不都合があった。例えば、塗料の塗布量や、塗料自体またはその色彩に変化があると、歯当たりによる色彩の変化を良好に捉えることができない、という不都合があった。
[課題2]さらに、上記従来例では、光明丹等の塗料の塗布量のばらつき、塗布後の時間経過による色の変化、照明の種類の変化や自然光の変化、外乱光の影響などによって塗料の色が変化すると、測定精度が不安定となってしまい、測定条件を均質化し測定精度を安定させることができない、という不都合があった。
すなわち、ノイズに強く、撮影した画像のみで判定可能な画像処理手法は、上記各文献に何ら開示されていない。
【0007】
[発明の目的]本発明の目的は、測定環境が変化しても歯当たり面を精度良く識別することにある。
【課題を解決するための手段】
【0008】
[着眼点]本発明の発明者は、塗布量や照明条件等が変化することで画像の明度(L)が変化すると色味(色相で特定される色の鮮やかさ)を示す彩度(S)が変化してしまう、という点に着目した。そして、歯当たり面を特定する前処理として、明度を安定させ色相の相違に応じた画像処理を工夫することで、上記課題を解決できるのではないか、との着想に至った。
【0009】
[課題解決手段1]実施例1に対応する第1群の本発明は、塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備えている。
そして、この歯当たり面検出部が、前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定処理と、前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成処理と、前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別処理とを備えた、という構成を採っている。
これにより、上記課題1を解決した。
【0010】
[課題解決手段2] 実施例2に対応する第2群の本発明は、第1群と同様に、カメラを備えている。
そして、課題解決手段2は、前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換部と、前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正処理部と、明度補正された前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備えた、という構成を採っている。
これにより、上記課題2を解決した。
【発明の効果】
【0011】
本発明は、本明細書の記載及び図面を考慮して各請求項記載の用語の意義を解釈し、各請求項に係る発明を認定すると、各請求項に係る発明は、上記背景技術等との関連において次の有利な効果を奏する。
【0012】
[発明の作用効果1] 課題解決手段1の歯当たり面検出装置は、色特徴値特定処理が、前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定し、色差データ生成処理が、前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成するため、歯当たりの程度に応じた色特徴値に基づいて人間の色覚に近い色差データを生成することができ、さらに、歯当たり面識別処理が、前記色差データのヒストグラムからしきい値を算出し、色差データを二値化することで前記歯当たり面を識別するため、歯当たり面の位置及び大きさを表す二値化データを良好に算出することができ、これにより、光明丹等の塗料の塗布と歯当たりとによる歯当たり面を安定して検出することができる。
特に、歯当たり面識別処理が、色差データのヒストグラムに基づいて歯当たり面を識別するため、測定環境に変化があっても、基準となる色特徴値からの色差として歯当たり面に生じる色彩の変化を捉えることができるため、塗料や塗料の色味に変化があっても、人間の色覚による検査と同様な精度で歯当たり面を識別することができる。
【0013】
[発明の作用効果2] 課題解決手段2の歯当たり面検出装置は、カラー座標変換部が、明度を算出し、明度補正処理部が、カラー画像の明度を予め定められた明度範囲内に向けて前記歯面の前記明度Lを補正するため、色相及び彩度を安定して好条件とすることができ、このため、照明条件や塗料の塗布量にかかわらず、歯当たり面を判定するための条件を均質化することができる。そして、明度補正により歯面部分の明度又は輝度を一定とすることで、色相及び彩度の感度を高め、定量化しやすい条件を確保し、歯当たり面の測定精度を安定させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態の構成例を示すブロック図である。(実施例1から3)
【図2】本発明の実施例1の構成例を示すブロック図である。(実施例1)
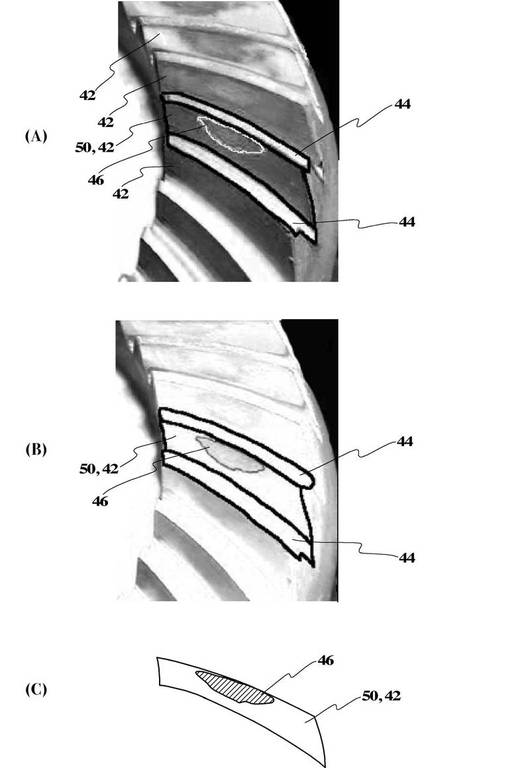
【図3】図3(A)から(C)は測定歯の一例を示す説明図である。(実施例1から3)
【図4】本発明の実施例2の構成例を示すブロック図である。(実施例2)
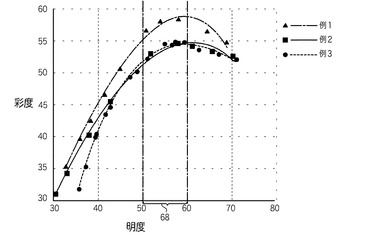
【図5】輝度と彩度との関係例を示すグラフ図である。(実施例2及び3)
【図6】輝度と色相との関係例を示すグラフ図である。(実施例2及び3)
【図7】本発明の実施例3の構成例を示すブロック図である。(実施例3)
【図8】実施例3のハードウエア資源の構成例を示すブロック図である。(実施例3)
【図9】実施例3の処理工程の一例を示すフローチャートである。(実施例3)
【図10】図10(A)は明度57の原画像の一例を示す図で、図10(B)は原画像から歯当たり面を抽出した一例を示す図である。(実施例1から3)
【図11】図10(A)に示す原画像のヒストグラムの一例を示す説明図である。(実施例1から3)
【図12】図10(A)に示す原画像の色差データを二値化した二値化画像の一例を示す説明図である。(実施例1から3)
【図13】図13(A)は明度40の原画像の一例を示す図で、図13(B)は原画像から歯当たり面を抽出した一例を示す図で、図13(C)は明度による補正後の補正画像から歯当たり面を抽出した一例を示す図である。(実施例1から3)
【図14】図13(A)に示す原画像のヒストグラムの一例を示す説明図である。(実施例1から3)
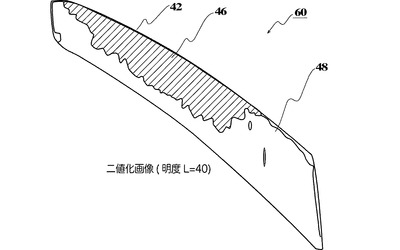
【図15】図13(A)に示す原画像の色差データを二値化した二値化画像の一例を示す説明図である。(実施例1から3)
【図16】図16(A)は明度67の原画像の一例を示す図で、図16(B)は原画像から歯当たり面を抽出した一例を示す図である。(実施例1から3)
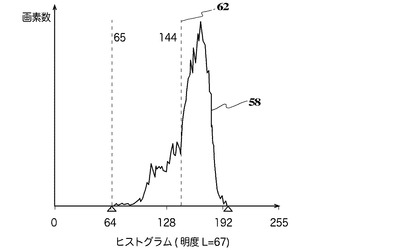
【図17】図16(A)に示す原画像のヒストグラムの一例を示す説明図である。(実施例1から3)
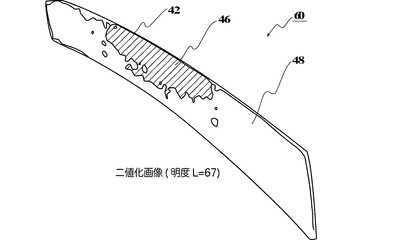
【図18】図16(A)に示す原画像の色差データを二値化した二値化画像の一例を示す説明図である。(実施例1から3)
【発明を実施するための形態】
【0015】
発明を実施するための形態として、3つの実施例を開示する。実施例1は歯当たり面検出部14を有する歯当たり面検出装置であり、実施例2は明度補正処理部28を有する歯当たり面検出装置であり、実施例3は歯当たり面検出部14と明度補正処理部28との両方を有する歯当たり面検出装置である。実施例1から3までを含めて実施形態という。
【0016】
本実施形態の検出対象は種々の歯車の歯当たり面46であり、特定の歯車に限定されず、多様な歯車の多様な歯当たり面46を検出対象とすることができる。そして、歯車の歯面42が金属であると、より良好に検出することができ、特に、多数の歯面42での歯当たりの程度が均質であるか否か等の検査に用いることもできる。
【0017】
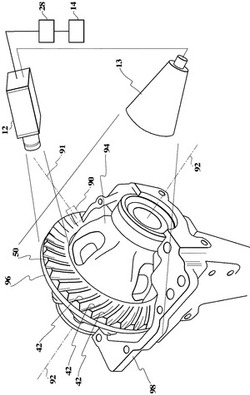
図1を参照すると、歯当たり面検出装置は、四輪車の駆動車輪に用いられるデファレンシャル(デフ,差動装置)のファイナル・ギア(リングギア96)の歯面42を検出対象としている。図示の例はスパイラル・ベベルギアである。
歯当たり面検出装置は、塗料40が塗布された歯面42を撮像するカメラ12と、当該歯面42を照明する照明機器13とを備え、そして、実施例に応じて、歯当たり面検出部14と、明度補正処理部28との一方または両方を備える。
【0018】
差動装置は、四輪車の右左折等の回転に際して、その回転半径に応じて、左右の駆動輪の回転数を変化させる機構であり、FRのプロペラシャフトやFFのトランスミッション等の駆動入力91と、左右のドライブシャフト92との間に設けられる。差動装置は、駆動入力91となるドライブピニオン90とかみ合うリングギア96と、このリングギア96と一体に回転するディファレンシャルケース94と、この駆動入力91に応じたディファレンシャルケース94の回転を公転としてディファレンシャルケース94内で左右のドライブシャフト92(アクスルシャフト)毎に自転するピニオンギア及びサイドギア(図示せず)とを備えている。左右のサイドギアは、公転しつつ自転により左右の車輪に与えられる抵抗に応じた自転をし、ドライブシャフト92に回転力を伝達する。
【0019】
そして、ディファレンシャルケース94は、ギアキャリア98に回動可能に支持されている。ディファレンシャルケース94のリングギア96は、多数の歯面42を有する。このリングギア96の歯面42がドライブピニオン90とかみ合うことで、駆動入力91がドライブシャフト92及び駆動輪に伝達される。このため、リングギア96の噛み合わせ面(歯面42)の良否が性能の安定に重要である。
【0020】
本実施形態の歯当たり面検出装置は、例えば、このようなリングギア96の歯面42での歯当たり面46を検出し、歯当たり面46の面積や、重心位置や、予め定められた面積や重心位置との差や、歯当たりの程度等を算出する。そして、通常の歯車の歯面42の他、スパイラル・ベベルギアのように歯面42の形状が複雑な歯車であっても、その歯当たり面46を検出することができる。
【0021】
本実施形態では、歯面42に塗料40を塗布した後にリングギア96とドライブピニオン90とをかみ合わせることで、歯当たり面46の塗料40を擦り、この擦り(当たり)により変色した塗料40の状態を画像処理により識別する。塗料40としては、彩度の高い無機顔料からなる粒径が微細な粉体が好ましく、例えば、赤色顔料である光明丹を使用することができる。光明丹は、鉛丹ともいわれ、四酸化鉛を主成分とし、当たりの検査にて従前より活用されている。また、鉛ではなく、粒径が微細な他の顔料を使用しても良い。
【0022】
人間の色覚は、全ての色について同一の分解能を有するのではなく、赤からオレンジに至る色彩の識別力が高いため、赤色の顔料である光明丹を用いると、微妙な色の変化を目視検査により高い分解能で識別することができる。
【0023】
そして、本実施形態では、当たりによる塗料40の変色の状態をカメラ12で撮像し、このカラー画像52をデジタル処理することで、歯当たり面46を検出する。カラー画像52をデジタル処理する前提として、従来例では、単純に、RGB(レッドR、グリーンG、ブルーB)の表色系を使用しているが、本実施形態では、色差δや、簡易色差Δを算出するために、RGBではない表色系をも使用する。
【0024】
色を定量的に表すことを表色といい、表色のための体系を表色系という。表色系には、色表その他物体の色を表す顕色系と、色の混色による等色を基準として色を表す混色系とがある。混色系には、モニター等の光源光の特定に有用な加法混色と、印刷物等の物体光の特定に有用な減法混色とがある。加法混色では、RGBが用いられ、減法混色では、CMYK(シアン、イエロー、マゼンタ、ブラック)が多用されている。
【0025】
顕色系としては、人間の感覚に基づいて色表を並べたマンセル表色系がある。マンセル表色系は、明度(マンセルバリューV)を縦軸に、色相(マンセルヒューH)を円周方向に、彩度(マンセルクロマC)を半径方向とし、色を「色相 明度/彩度」で表す。例えば、JIS慣用色名での赤は「5R 4/14」と表される。マンセル表色系は、色相の値毎に、明るさを特定する明度と、色の鮮やかさを特定する彩度とにより色を表すため、色と色との間の差(色差)を人間の感覚に近くすることができる。しかし、色表を用いるため、色表と色表との間の色を定量化することが難しい。
【0026】
混色系では、RGB等の刺激値の組み合わせにより、多様な色を表現することができる。この原刺激値の組み合わせを等色関数という。等色関数を使用すれば、原刺激値を用いて、任意の色を精度良く特定することができる。しかし、RGB表色系では、Rについて負の混色が生じてしまい、取扱が難しくなるため、負の混色を生じさせない原刺激値XYZを定め、XYZ表色系が定義された。XYZ表色系や、xy色度図は色の定量化によく利用されている。また、これら各種表色系でのそれぞれの刺激値の組み合わせによる色の取扱を色空間ともいう。
【0027】
XYZ表色系では、その色空間内の距離が人間の感覚による色差に対応せず、xy色度図での距離として求めた色差は、知覚的には均等とならない。中心色と等色の範囲を示す楕円をアクアダム楕円といい、xy色度図にこのアクアダム楕円を重ねると、xy色度図の座標によって楕円の大きさが異なってしまう。
【0028】
この色差は、等色関数とは異なり非線形であり、均等色空間の定義は困難であるが、明度を含んだ均等色空間として、XYZを原刺激値として、それぞれ三次元直交座標を用いたL*a*b*色空間とL*u*v*色空間とが提案されている。L*は明度を表し、a*b*と、u*v*とは色相と彩度からなる色知覚の属性を表す。L*a*b*色空間はマンセル表色系と対応するように組み立てられており、L*u*v*色空間はアクアダム楕円との対応が良い。この均等色空間では、空間内の距離を人間の感覚に近い色差とすることができる。
【0029】
コンピュータ・グラフィックスでは、上記色彩学での表色系ではないが、HSL表色系と、HSB表色系とが用いられている。このカラーモデルは、マンセル表色系と類似しており、色を3軸で表している。HSB表色系では、色相(ヒューH)、彩度(サチュレーションS)、輝度(ブライトネスB)の3軸、HSL表色系では輝度Bに代えて明度(ライトネスL)としている。色相は、色の系統を360度の角度で表し、マンセル表色系と同様な色相環となる。彩度は、0%から100%までの値で表現され、0%は無彩色、100%はその色相及び明度において最も鮮やかな色である。明度は明るさのレベルを示し、0%は黒、100%がその色相及び彩度において最も明るい状態を示す。
【0030】
RGBで撮影されたカラー画像52は、予め定められた算式を用いてHSL表色系に変換することができる。また、HSL表色系や、HSB表色系は、マンセル表色系と類似しており、そのHSL表色系の空間での距離を色差として扱いやすいという特徴がある。
【実施例1】
【0031】
<1歯当たり面検出装置:変化対応>
<1.1色差データ>
本実施形態の実施例1を開示する。実施例1は、歯当たり面46を精度良く識別するために、色差データ56に基づく情報処理をするものである。
【0032】
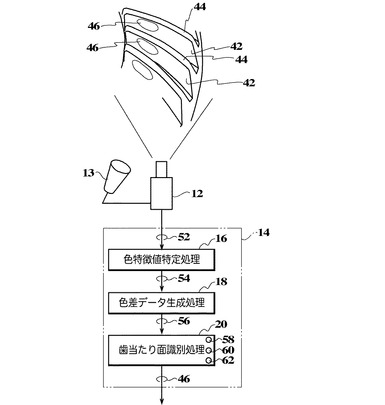
歯当たり面検出装置は、その主要な要素として、カメラ12と、歯当たり面検出部14とを備え、歯当たり面検出部14は、前記カラー画像52に基づいて、前記歯面42での歯当たり面46を検出する。このために、歯当たり面検出部14が、色特徴値特定処理16と、色差データ生成処理18と、歯当たり面識別処理20とを備えている。
【0033】
図2に示す例では、歯当たり面検出装置14は、さらに、照明機器13を備えている。そして、測定対象物である歯面42には、塗料40が塗布されており、歯車の当たりによって、歯面42の歯当たり面46にて塗料40の色味が変化している。
【0034】
カメラ12は、この塗料40が塗布された歯面42をカラーで撮像してカラー画像52を生成する。カラー画像52は、例えば、RGB表色系でのデータであり、1画素について、レッドRの値と、グリーンGの値と、ブルーBの値とを有する。
好ましい例では、照明機器13が、予め定められた明るさで予め定められたスペクトル成分の照明光を照射し、カメラ12が、歯面42で照明光が反射した反射光を受光し、カラー画像52とすると良い。照明機器13としてハロゲンランプやキセノンランプ等を用いることで、照明光のスペクトル成分を自然光に近い白色光とすると、歯面42の色彩を正確にカラー画像52とすることができる。蛍光灯等を使用する際には、塗料40の色によっては、蛍光灯のスペクトルに応じた補正をすると良い。
【0035】
歯当たり面検出部14の色特徴値特定処理16は、前記カラー画像52から前記歯面42の色の特徴値となる色特徴値54を特定する。色特徴値54は、色差データ56を算出する基準となる色であり、撮像されたカラー画像52から求めると良い。本実施例では、光明丹等の塗料40を塗布した段階では、塗料40の色は明るく鮮やかであり、歯当たりの生じた部分は濃く暗い色味となる。色特徴値54は、この歯当たりの有無に応じた塗料40の色差δを検出しやすい特徴値とすると良い。色特徴値54としては、例えば、塗料40が塗布された面のうち、最も濃く暗い部分の色や、最も明るい部分の色とすると良い。最も濃い部分の色は明度Lと彩度Sとの和が最大となる画素の色で、最も明るい部分の色は明度Lと彩度Sとの和が最小となる画素の色とすることができる。最も明るい色は照明環境等に依存して変化しやすい傾向があるため、色特徴値54及び色差δを安定させるには、濃い部分の色を色特徴値54とすることが望ましい。
【0036】
色差データ生成処理18は、前記歯面42の各カラー値について前記色特徴値54との色差δを算出することで色差データ56を生成する。色差δは、表色系による色空間での色の値を座標値とした際に、2色の座標値の間の距離で近似することができる。カラー画像52の色空間をL*a*b*色空間やL*u*v*色空間とすると、人間の色覚に近い色差δを扱うことができる。また、HSB色空間やHSL(LHS)色空間としても、色空間内の距離を比較的人間の色覚に近い色差δとして扱うことができる。そして、歯面42の全てのカラー値について、この色差δを算出したデータを色差データ56という。この色差δに基づいた色差データ56を使用すると、人間の色覚に近いデータを定量化できるため、従前の目視による検査手法と対比し、整合させやすい。
また、色差データ56は、色の差を数値で表したもので、1チャンネルのデータであり、可視化すると、グレースケール(濃淡画像)とすることができる。
【0037】
歯当たり面識別処理20は、前記色差データ56のヒストグラム58からしきい値62を算出する。色差データ56は、色特徴値54からの距離を示すデータであり、色特徴値54を濃い色とすると、歯面42のうち、濃く暗い部分への距離が近く小さい数値で、明るく鮮やかな部分への距離が遠く大きい数値となる。この1チャンネルのデータはヒストグラム58を得ることができ、歯当たりが生じて濃く暗い部分と、歯当たりしていない明るい鮮やかな部分とを切り分けることができる。例えば、判別分析法を用いると、明るい部分を背景として、抽出すべき暗い部分と背景とのしきい値62を求めることができる。
【0038】
歯当たり面識別処理20は、このしきい値62を用いて、色差データ56を二値化することで前記歯当たり面46を識別する。ヒストグラム58から得たしきい値62を用いて色差データ56を二値化すると、歯当たり面46のみを抽出した二値化データ60を得ることができる。この二値化データ60を使用すると、歯当たり面46の位置、大きさ(面積)及び形状の特徴を画像処理により検出することができる。
【0039】
図3(A)にカラー画像52をRGBとした際のブルーBチャンネル画像の一例を、図3(B)にレッドRチャンネルの一例をそれぞれグレースケール化して示す。図3(C)に、測定歯50の歯面42の測定結果の一例を示す。
図3を参照すると、リングギア96は、歯車の側面となる歯面42と、歯車の上部となる歯先44とを有している。そして、歯面42は、歯当たりが生じた歯当たり面46と、歯面42のうち歯当たり面46以外の部分である非歯当たり面48とを有している。歯当たりは、1回か又は複数回である。また、歯当たりに際して歯面42に加えられる力も均一ではないため、歯当たりの強度は歯面48の位置に応じて異なる。しかし、歯当たりの試験の結果として、歯当たりが生じた歯当たり面46と、若干の歯当たりがあった部分を含む非歯当たり面48とを区分することができる。
【0040】
図3(A)及び(B)に示す例では、測定歯50を特定するために、歯先44の形状の特徴を利用したパターンマッチングを用いている。リングギア96を回転させながらカラー画像52を撮像し、上下の歯先44に挟まれた歯面42を測定歯50として抽出する。歯当たり面検出部14は、図3(C)に示すように、測定歯50を抽出すると、色特徴値特定処理16、色差データ生成処理18及び歯当たり面識別処理20とにより、歯当たり面46を抽出する。
【0041】
次に、色差データ56の具体的な計算手法を説明する。好ましい例では、カラー画像52をHSL(LHS)表色系で表色し、前記カラー画像52の各カラー値を明度L、色相H、彩度Sで表す。そして、前記色差データ生成処理18が、前記色特徴値54のカラー値を明度Lo、色相Ho、彩度Soとしたとき、次式(1)の色差算出式で前記色差δを算出する。次式(1)では、HSL色空間内での距離を色差δとするため、RGB色空間での距離による色差と比較して、人間の色覚に近い色差データ56を生成することができる。そして、式(1)を用いて人間の色覚に近い色差データ56は、歯当たりの強度と関連性が高く、このため、精度の高い検出をすることができる。
【0042】
【数1】

【0043】
また、別の好ましい例では、前記色差データ生成処理18が、前記色特徴値54のカラー値を明度Lo、色相Ho、彩度Soとし、係数をα、β及びγとしたとき、次式(2)の簡易色差算出式で簡易色差Δを算出する。簡易色差Δの算出では、数値の引き算とかけ算と足し算のみで簡易色差Δを求めることができるため、色差データ56を高速に算出することができる。そして、係数α,β及びγを調整することで、塗料40の色彩に応じて実用上問題のない簡易な色差データ56を算出することができる。また、光明丹を使用する例では、α=β=γ=1としても一定の精度で検出することができる。係数α,β及びγを調整する際には、式(1)で算出した色差群を目標値として、最小自乗法等を用いて係数の値を最適化するようにしても良い。
【0044】
【数2】
【0045】
・1.1色差データの効果
上述のように、色特徴値特定処理16が、前記カラー画像52から前記歯面42の色の特徴値となる色特徴値54を特定すし、色差データ生成処理18が、前記歯面42の各カラー値について前記色特徴値54との色差δを算出することで色差データ56を生成するため、歯当たりの程度に応じた色特徴値54に基づいて人間の色覚に近い色差データ56を生成することができ、さらに、歯当たり面識別処理20が、前記色差データ56のヒストグラム58からしきい値62を算出し、色差データ56を二値化することで前記歯当たり面46を識別するため、光明丹等の塗料40の塗布と歯当たりとによる歯当たり面46を良好に検出することができる。
【0046】
また、色差データ56の使用により、歯当たりによる色味の変化を良好に反映したデータを得ることができ、そして、色差データ56のヒストグラム58から二値化するため、背景となる非歯当たり面48を分離し、歯当たり面46を安定して検出することができる。
【0047】
そして、色差δの算出では、HSL色空間を使用し、色空間内での距離を色差δとすると、人間の色覚に近い定量化が可能となり、従来の目視による検査との整合性を保ち、従前の検査のノウハウを活用しつつ、画像処理による安定した検出をすることができる。
また、簡易色差Δを算出する例では、計算を簡略化し、高速な処理により歯当たり面46を検出することが可能となる。
【実施例2】
【0048】
<2歯当たり面検出装置:均質化>
<2.1明度補正>
次に、本実施形態の実施例2を開示する。実施例2は、測定条件を均質化するために、予め定められた明度範囲68を目標として明度補正をするものである。
【0049】
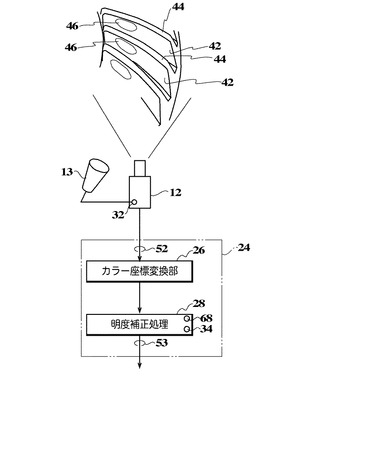
歯当たり面検出装置は、その主要な要素として、カメラ12と、カラー座標変換部26と、明度補正処理部28と、歯当たり面検出部14とを備えている。そして、好ましい例では、カメラ12が、ゲイン調整部32を備え、明度補正処理部28が、ゲイン調整処理34とを備えると良い。
【0050】
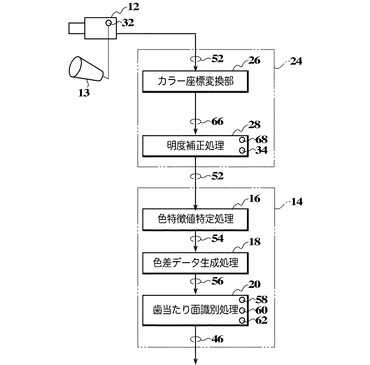
図4に示す例では、カメラ12は、塗料40が塗布された歯面42をカラーで撮像してカラー画像52を生成する。画像処理部24内のカラー座標変換部26は、前記カラー画像52の表色系(色空間)を変換して当該カラー画像52の明度を算出する。変換前の色空間としてはRGB色空間があり、変換後の色空間としてはHSL色空間やHSB色空間がある。また、変換後の色空間としては、L*a*b*色空間やL*u*v*色空間を採用しても良い。明度Lは、色空間によっては、輝度Bという名称となる。明度Lは、色相や彩度とは異なる色味の無い値で、白から黒までの明るさを与える値である。
【0051】
明度補正処理部28は、前記カラー画像52の前記明度Lを予め定められた明度範囲68内に向けて前記歯面42の前記明度L又は輝度を補正する。明度範囲68は、明度Lの中間値(例えば、0(%)から100(%)であれば50(%))から若干明るめの範囲、例えば、HSL色空間の明度Lでは50から60の範囲とすると良い。HSL空間にて明度補正する際には、各画素の明度を(55/L)倍することで、明度Lの中心値を55近傍に補正し、これにより、明度Lを予め定められた明度範囲68内となるように補正する。RGB色空間にて明度補正する際には、RGB各チャンネルの輝度値を(55/L)倍すると良い。この倍率は、分子及び分母が明度(通常の数値またはパーセントで示される比率)で無次元の比率である。分子は、明度範囲68の中心値とし、分母は、カラー画像52の明度とすると良い。この比率を明度補正比率という。明度補正比率は、中心値(例えば、55)より明るい明度値を暗めに、中心値より暗い明度値を明るめに補正する役割を果たす。
【0052】
歯当たり面検出部14は、明度補正された前記カラー画像52に基づいて前記歯面42での歯当たり面46を検出する。明度補正されると、色相H及び彩度Sのズレが小さく、歯当たり面46の色味に応じた検出を良好に行うことができる。
【0053】
図5に、明度Lと彩度Sとの相関関係を示す。この例では、照明条件とカメラ12の絞りを変えて、例1から例3について測定歯50を撮影し、歯当たり面46の全体の明度L及び彩度Sを計算した。図5に示すように、明度L = 60 近傍で彩度Sが最大となる。彩度Sが大きくなると、歯当たり面46と非歯当たり面48との色差δが大きくなり、すると、歯当たり面46の識別が容易になる。
そして、明度L = 50 を超えると識別が容易になる。さらに、明度L = 60 を超えると、色飛び(RGBチャンネルの一部がレンジオーバ)が生じてしまい、彩度Sが低下し、歯当たり面46の識別が難しくなる。
【0054】
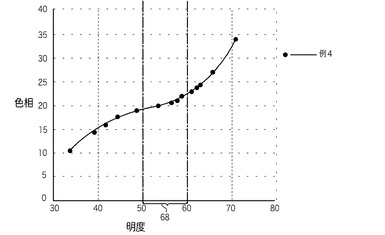
図6に、明度Lと色相Hとの相関関係を示す。そして、明度L = 50から60の条件で、比較的一定の値となっている。一方、明度Lがこの条件を外れると、色相Hが変化し、実際の色とカラー画像52での色とが異なる色となってしまう。
【0055】
図5及び図6に示すように、明度L = 50から60の条件が最適であり、明度範囲68を50から60の範囲とし、中央値を55とすると良い。このため、明度補正処理部28は、カラー画像52の明度Lを中央値L=55(ア5)となるように明度を補正すると良い。
【0056】
・2.1明度補正の効果
上述のように、カラー座標変換部26が、カラー画像52の明度Lを算出し、明度補正処理部28が、カラー画像52の明度Lを予め定められた明度範囲68内に向けて前記歯面42の前記明度Lを補正するため、色相及び彩度を安定して好条件とすることができ、このため、照明条件や塗料40の塗布量にかかわらず、歯当たり面46を判定するための条件を均質化することで、測定精度を安定させることができる。
【0057】
<2.2ゲイン調整>
再度図4を参照すると、カメラ12が、撮像のゲインを調整するゲイン調整部32を備えている。そして、明度補正処理部28は、前記カラー画像52の明度Lが前記明度範囲68外の際に、前記ゲインの調整を制御するゲイン調整処理34を備えている。
ゲイン調整部32は、例えば、カメラ12の画像入力ボード74のゲイン調整機能であり、また、照明機器13の光量の自動調整や、カメラ12の搾りの自動調整としても良い。
【0058】
ゲイン調整処理34は、例えば、カラー画像52の全体や、または歯面42の部分の明度Lの平均値や中央値を求めてこの明度が予め定められた明度値(例えば、60)より大きい場合や、カラー画像52全体または歯面42の明度Lの内最大の明度が予め定められた明度値(例えば、65)より大きい場合に、不良のカラー画像52と判定し、ゲインを再調整した撮像を制御すると良い。
【0059】
カラー画像52の良否判定のしきい値62は、測定対象及び塗料40の色相や最大の彩度等に応じて、図4及び図5に示す相関関係のデータ等を用いて定めると良い。このゲイン調整により、RGBの各チャンネルの何れかでオーバーフローが生じ、明度補正処理では均質な画像を得ることができない場合などに、再撮影を制御することができる。
また、ゲイン調整後に再撮影したカラー画像52について、さらに、明度範囲68に向けた明度補正処理をすると、より均質化した一定条件での検出をすることができる。
【0060】
・2.2ゲイン調整の効果
上述のように、カラー画像52の明度Lが前記明度範囲68外の際に、ゲイン調整処理34が前記ゲインの調整を制御し、この制御に従ってゲイン調整部32がカメラ12や照明機器13等の撮像のゲインを調整し、再撮影するため、カラー画像52が明るすぎてオーバーフローが生じ、色彩の再現性が悪化し、明度補正では均質さを取り戻せない場合には、ゲインを調整した再撮影によりカラー画像52の明度の範囲を一定範囲とすることができる。そして、このゲイン調整により、低精度での歯当たりの判定を事前に除外し、さらに、日射量等の照明環境の変化があっても検出精度を安定させることができる。
このように、撮影条件等に変化があっても、オーバーフローの悪影響を事前に除外し、カラー画像52を均質化することができる。従って、歯当たり面46の検出について、熟練者による判定よりも高精度な定量化をすることができる。
【実施例3】
【0061】
<3歯当たり面検出装置:変化対応及び均質化>
<3.1明度及び色差>
さらに、実施例3を開示する。実施例3は、歯当たりの大きさや位置を精度良く安定して検出するために、カラー画像52の色相及び彩度の情報を最大限活用しようとするものである。
【0062】
歯当たり面検出装置は、その主要な要素として、カメラ12と、カラー座標変換部26と、明度補正処理部28と、歯当たり面検出部14とを備えている。そして、歯当たり面検出部14は、色特徴値特定処理16と、色差データ生成処理18と、歯当たり面識別処理20とを備えている。また、好ましい例では、ゲイン調整部32と、ゲイン調整処理34とを備えると良い。
【0063】
図7に示す例では、カメラ12は、塗料40が塗布された歯面42をカラーで撮像してカラー画像52を生成する。そして、カラー座標変換部26は、カラー画像52の色空間を変換して当該カラー画像52の明度Lを算出する。明度補正処理部28は、カラー画像52の前記明度Lを予め定められた明度範囲68内に向けて前記歯面42の前記明度L又は輝度を補正する。例えば、特徴的な明度値をL1としたとき、カラー画像52の各画素の明度Lに実施例2に開示した(55/L1)を掛けることで補正する。このような明度補正により、撮影環境や塗料40の塗布量等の変化があってもカラー画像52での色の再現性を均質にすることができる。
【0064】
そして、歯当たり面検出部14は、明度補正された前記カラー画像52に基づいて前記歯面42での歯当たり面46を検出する。この際に、色特徴値特定処理16は、前記カラー画像52から前記歯面42の色の特徴値となる色特徴値54を特定する。色特徴値54は、例えば、実施例1にて開示した塗料40の最も濃い部分(明度Lと彩度Sとの和が最大となる点)とすると良い。そして、色差データ生成処理18は、前記歯面42の各カラー値について前記色特徴値54との色差δを算出することで色差データ56を生成する。色差δは、上述した式(1)を使用して色空間内の距離として求めることができる。また、式(2)による簡易色差Δを使用しても良い。
【0065】
歯当たり面識別処理20は、前記色差データ56のヒストグラム58からしきい値62を算出すると共に、当該色差データ56を二値化することで、前記歯当たり面46を識別する。また、画像処理部24は、測定対象となる歯面42を抽出するためのパターンマッチング等の画像処理をする。例えば、画像処理部24は、カラー画像52を微分処理して画像中のエッジを抽出し、このエッジを予め定められたパターンと比較することで、画像中の対象となるエッジを特定する。
【0066】
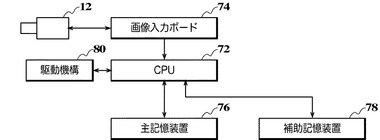
図8に歯当たり面検出装置のハードウエア資源の構成例を示す。図8に示す例では、カメラ12で撮像する画像を調整してCPU72に入力する画像入力ボード74と、演算をするCPU72と、CPU72に記憶空間を提供する主記憶装置76と、不揮発性のハードディスク等の補助記憶装置78と、測定対象となる歯面42を備えている。
【0067】
画像入力ボード74は、カラー画像52のゲインを調整するゲイン調整部32として機能する。また、カラー画像52の表色系(色空間)を変換する機能を有するようにしても良い。CPU72は、予め導入された歯当たり面検出用プログラムを実行することで、図7に示す明度補正処理部28や歯当たり面検出部14として機能する。また、CPU72は、カラー座標変換部26として機能するように構成しても良い。主記憶装置76はCPU72の一次記憶装置であり、プログラムやデータを一時的に格納する。補助記憶装置78は、例えばハードディスクであり、歯当たり面検出用プログラムデータや、予め定められた明度範囲68の中心値や、画像処理によるパターンマッチングに使用するパターンデータや、歯当たり面46の重心位置及び面積についての許容範囲等を記憶する。駆動機構80は、塗料40を塗布した歯車(例えば、リングギア96)を回転させることで歯当たりを生じさせる。さらに、駆動機構80は、歯面42のカメラ12に対する相対的な位置を位置決めする際に当該歯車を回転させる。
【0068】
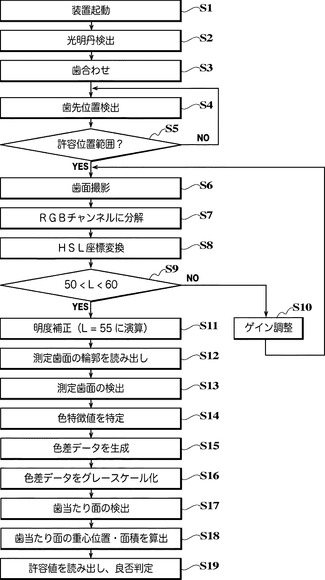
図9に実施例3の測定フローの一例を示す。歯当たり面検出装置を起動し(ステップS1)、塗布された塗料40、例えば光明丹を検出する(ステップS2)。次に、駆動機構80を制御してリングギア96を回転させ、歯合わせをする(ステップS3)。
【0069】
歯合わせにより歯当たりをさせた後、歯面42を撮影するために、歯面42の位置決めをする。すなわち、まず、画像処理部24は、パターンマッチングにより歯先44の位置を検出し(ステップS4)、歯先44の位置が許容範囲内であるか否かを確認する(ステップS5)。許容範囲内でなければ、駆動機構80を制御してリングギア96を回転させ、再度位置決めする。許容範囲内であれば、カメラ12を制御して、歯面42を撮影する(ステップS6,撮像工程)。
【0070】
次に、カラー画像52をRGBチャンネルに分解し(ステップS7)RGBそれぞれの値を用いて、HSL色空間(LHS色空間)に座標変換し、明度Lと、彩度Sと、色相Hとを算出する(ステップS8,カラー座標変換工程)。
【0071】
色の違いを識別する場合、明度L = 50 辺りの感度が高いことが知られている。明度Lが低い場合は、色の識別が難しく、高すぎる場合は色飛び(RGBのいずれかのチャンネルがレンジオーバすること)により色相Hがずれてしまうことがある。そこで、党明度Lが55近傍(55ア5)媒になるように、カメラ12および画像入力ボード74のゲインを自動補正し、再撮影する。すなわち、ゲイン調整処理34は、HSL色空間での明度Lの値に基づいて、カラー画像52の良否を判定し、不良の際には再撮影する。
【0072】
具体的には、カラー画像52の明度Lが、予め定められた明度範囲68外の場合に、カラー画像52の不良として、ゲインを調整し(ステップS10)、再度撮影する(ステップS6)。明度範囲68は、例えば、50から60である。カラー画像52の特徴的な明度L1としては、カラー画像52中の明度の最大値や、平均値や、中央値や、最小値などを使用することができる。
【0073】
次に、HSLの明度LかRGB各チャンネルの輝度を(55/L1)倍することにより明度L=55に向けてソフト上で明度補正する(ステップS11,明度補正工程)。明度Lの基準を一定とすることで、照明条件、光明丹の塗付量の差による濃淡の影響を軽減し、カラー画像52を均質とすることができる。
【0074】
そして、歯面42の輪郭データを補助記憶装置78から読み出し(ステップS13)、パターンマッチングにより測定対象の歯面42を検出する(ステップS13)。この歯面42の検出により、歯面42中の歯当たり面46と非歯当たり面48のみのデータを抽出することができる。続いて、色差データ56を算出する。具体的には、まず、光明丹の最も濃い部分(L,Sの和が最大となる点)を色特徴値54として選出し、基準点0とし、明度基準値Lo、色相基準値Ho、彩度基準値Soを算出する(ステップS14,色特徴値特定工程)。
【0075】
次に、色差データ生成処理18は、カラー画像52の各ピクセルの明度L、色相H、彩度Sの値から、上述した式(1)により色差δを算出する(ステップS15,色差データ生成工程)。また、式(2)により簡易色差Δを算出しても良い。色差δ又は簡易色差Δを256階調へ換算して濃淡モノクロ画像(グレースケール)へ変換し、明度L=55一定とすることにより、色差をより明確にした画像を算出し、歯当たり面46の識別を容易とすることができる。明度Lの条件をほぼ一定にすることにより、歯当たり面46と非歯当たり面48の識別が定量的に再現可能となる。
【0076】
続いて、歯当たり面識別処理20は、濃淡モノクロ画像とした色差データ56に基づいて、判別分析法による二値化手法を用いて、歯当たり面46の候補を抽出する(ステップS17,歯当たり面識別工程)。複数領域の候補がある場合、上歯と下歯とについて同様の処理を行い、同位置に存在する領域を歯当たり面46とする。歯当たり面46を検出すると、この歯当たり面46の重心位置及び面積を算出し(ステップS18)、補助記憶装置78から予め定められた重心位置及び面積の許容値を読み出して(ステップS19)、比較することで、歯当たり面46の良否を判定する(ステップS20)。
【0077】
重心位置は、歯当たり面46に含まれる各ピクセルのx座標値の平均値と、y座標値の平均値とにより求めることができ、重心位置の許容値は一定範囲の座標値とすることができる。歯当たり面46の面積は、歯当たり面46に含まれるピクセル(画素)の数とすることができ、面積の許容値をピクセル数での範囲とすることができる。カラー画像52及び色差データ56の各ピクセルの大きさと、実空間での大きさとをスケール値で対応させることができ、このスケール値を予め測定しておくと、重心位置及び面積とそれらの許容値とを実空間での長さ及び広さとすることができる。
【0078】
この図9に示す工程は、CPU72が歯当たり面検出用プログラムを実行することで実現することができる。
【0079】
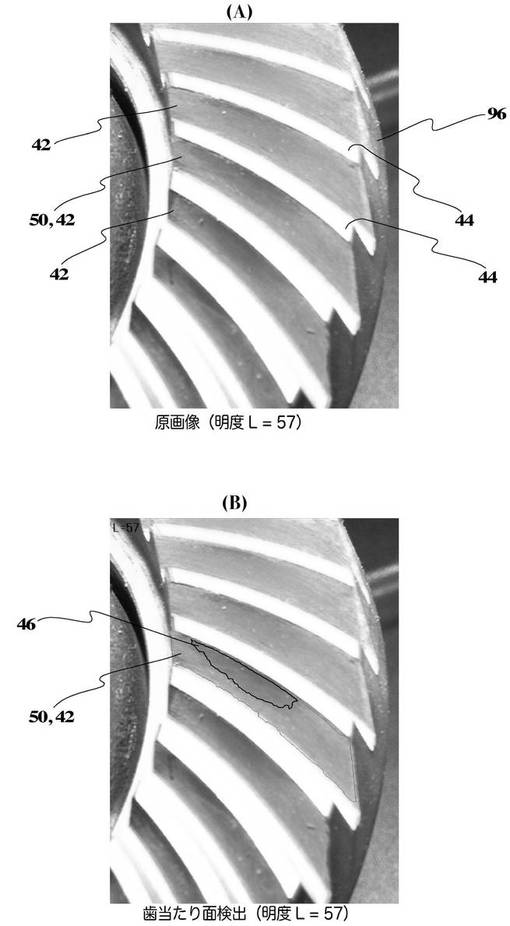
図10(A)は明度L = 57 の原画像の一例を示す図で、図10(B)は原画像から歯当たり面46を抽出した一例を示す図である。図10に示す例では、明度57であり、予め定められた明度範囲68内であるため、明度補正を必要としない。図10(A)に示すように、リングギア96の歯面42と歯先44とが撮影され、そのうちの1歯が測定歯50となる。図10(A)に示す原画像から歯当たり面46を抽出すると、図10(B)に示す例となる。
【0080】
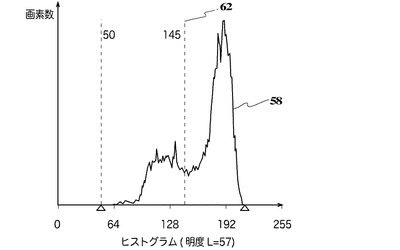
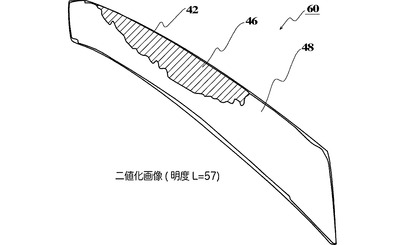
図11は、図10(A)に示す明度L = 57 の原画像のヒストグラム58の一例を示す説明図であり、図12は、図10(A)に示す原画像の色差データ56を二値化した二値化画像の一例を示す説明図である。測定歯50の歯面42のデータを抽出し、色差データ56をグレースケール化すると、図11に示すように、判別分析に適した2つのピークを得ることができる。すなわち、色差データ56は、背景部分(非歯当たり面48に属する階調値のグループ)と特徴部分(歯当たり面46に属する階調値のグループ)とに別れ、2つのピークの谷部分の値(図11に示す例では、値145)をしきい値62として二値化すると、特徴部分(歯当たり面46)のみを抽出することができる。
【0081】
すなわち、図11及び図12に示すように、明度57の場合、色差データ56のヒストグラム58は、背景部分と特徴部分とがしきい値62(値145)にて明確に切り分けられ、このしきい値62で色差データ56を二値化すると、図12に示すように、歯当たり面46を良好に検出することができる。そして、この二値化データ60を使用すると、歯当たり面46の重心位置及び面積を計算でき、その値も実際の歯当たり面46と良く対応したものとなっている。
【0082】
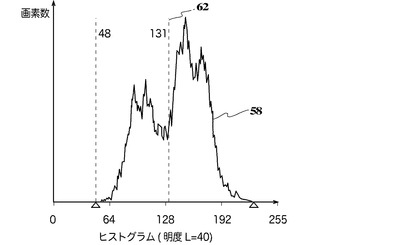
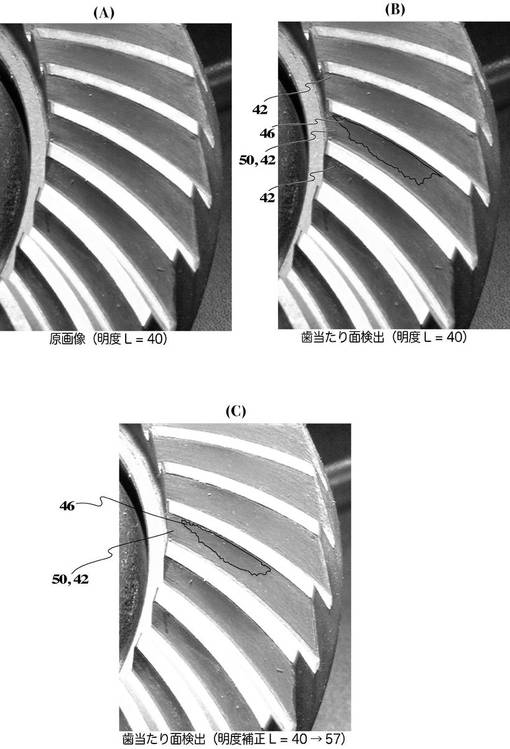
図13(A)は、図10(A)と同一の対象について、明度L = 40 である原画像の一例を示す図であり、輝度が低く明度補正が必要となる。図13(B)は原画像から歯当たり面46を抽出した一例を示す図で、測定歯50の歯当たり面46が大きめに検出されている。明度L = 40 の原画像のように明度が低いと、最適な図10(B)と比較して、識別した領域は、実際の歯当たり面46より広がる傾向がある。図13(C)は明度Lによる輝度値の補正後の色差データ56から歯当たり面46を抽出した一例を示す図で、歯当たり面46の重心位置及び面積を良好に抽出している。この図13(C)に示す補正は、カラー画像52のRGB各チャンネルを定数倍するという輝度補正をした結果であり、図10(B)に近い領域を検出できている。
【0083】
図14は、図13(A)に示す原画像のヒストグラム58の一例を示す説明図であり、図15は、図13(A)に示す色差データ56を二値化した二値化画像の一例を示す説明図であり、明度40と暗いカラー画像52によるため、特徴部分となる歯当たり面46が実際より大きめに抽出されている。一方、明度補正をすると、図13(C)に示すように、適正明度である図10(B)に示す場合とほぼ同様に歯当たり面46を検出することができる。
【0084】
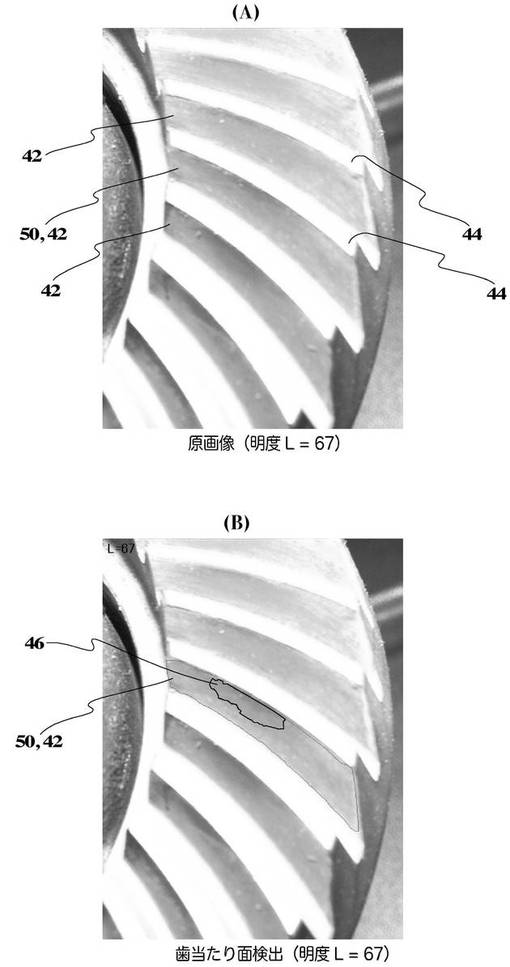
図16(A)は明度67の原画像の一例を示す図で、図16(B)は原画像から歯当たり面46を抽出した一例を示す図である。図16に示す例では、明度L = 67 であり、輝度が高すぎ明度補正をすることができない。図17は、図16(B)に示す原画像のヒストグラム58の一例を示す説明図であり、図18は、図16(B)に示す原画像の色差データ56を二値化した二値化画像の一例を示す説明図である。図16(A)に示すように明度が高すぎる場合は、Rチャンネルのレンジオーバにより歯当たり面46が不鮮明となる。そして、ヒストグラム58のピークが消滅し、歯当たり面46の識別が難しくなってしまう。このため、明度補正による修正が不可能とし、画像入力ボード74のゲインを下げての再撮影とすると良い。
【0085】
・3.1明度及び色差の効果
上述のように、RGBでのカラー画像52をHSL空間に変換し、明度Lが予め定められた明度範囲68となるように明度補正をし、その後に色差データ56を算出し、この色差データ56に基づいて歯当たり面46を抽出するため、照明の照度条件、光明丹の濃淡の影響を軽減でき、色差を識別できる感度を高くすることができる。これらにより、歯当たり面を正確に識別し、特に、面積・重心位置を安定して測定することができる。
【符号の説明】
【0086】
12 カメラ
13 照明機器
14 歯当たり面検出部
16 色特徴値特定処理
18 色差データ生成処理
20 歯当たり面識別処理
24 画像処理部
26 カラー座標変換部
28 明度補正処理部
32 ゲイン調整部
34 ゲイン調整処理
40 塗料
42 歯面
44 歯先
46 歯当たり面
48 非歯当たり面
50 測定歯
52 カラー画像
54 色特徴値
56 色差データ
58 ヒストグラム
60 二値化データ
62 しきい値
68 明度範囲
72 CPU
74 画像入力ボード
76 主記憶装置
78 補助記憶装置
80 駆動機構
90 ドライブピニオン
91 駆動入力
92 ドライブシャフト
94 ディファレンシャルケース
96 リングギア
98 ギアキャリア
δ 色差
Δ 簡易色差
L 明度
H 色相
S 彩度
【技術分野】
【0001】
本発明は、歯車の歯当たりを評価する技術分野に関連し、特に、歯車の歯当たり面を画像処理により評価する技術に関する。
【背景技術】
【0002】
従来は、歯当たり面(かみ合わせ面)を含む歯面に光明丹等の顔料を主成分とする塗料を塗布し、歯車を回転させた後に、塗料のはがれ具合を目視で確認し、はがれ具合に応じて歯当たりの良否を判定していた。しかし、この従来例では、目視検査であるため、歯当たり面の良否判定についての定量化が困難であった。
【0003】
特許文献1には、白黒のカメラで歯当たり面を撮影し、濃淡画像(グレースケール)をしきい値で二値化することで、歯当たり面を抽出する手法が提案されている。そして、この従来例では、しきい値の算出及び二値化は、歯当たり面を含み歯先を含まない歯面上の画素値に基づいて行われている(段落0048から0049,図8及び図9)。
特許文献2には、カラーのカメラで撮影したRGB画像をRGB毎の濃淡画像とし、それぞれを二値化して二値化画像を重ね合わせることで、歯当たりの強度に応じた4段階の階調画像を得る手法が提案されている(第3頁右上欄から左下欄、図3(a))。この手法では、ラフな自然光下での処理が可能とされているが(第4頁左上欄)、結局、歯当たり面の良否の判定自体は人手で行われている(第3頁右下欄から第4頁左上欄、図2)。
特許文献3には、RGB画像をRGB毎の濃淡画像とし、さらに、G成分とB成分とを加算して反転し、R成分と加算することで、光明丹の微妙な付着状態が明確に輝度差として現れる濃淡画像を得る手法が提案されている(段落0016から0018、図2)。特に、ラップ段差部分と歯当たり面との輝度差をより明確にすることが図られている(段落0018、図6)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10-096621号公報
【特許文献2】特開平3-115829号公報
【特許文献3】特開2004-220244号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1記載の手法では、光明丹等の塗料の色彩に基づいた判定をすることができず、歯当たりによる光明丹の擦れの程度を良好に判定することができない。
上記特許文献2記載の手法では、光明丹等の塗料の色彩を反映させた画像を生成できるが、歯当たりの良否の判定を自動化することができない。
上記特許文献3記載の手法では、光明丹等の塗料の色彩が変化した場合であっても、RGBの各成分による同一の手法で判定するため、実際の塗料の色彩が変化すると、良否判定の精度が低下してしまう。特に、光明丹等の塗付量のばらつきや、塗付後の時間経過による色の変化や、照明の種類や、照度条件の変化による塗料の色味の変化等の測定環境のばらつきに対応できない。
【0006】
このように、上記従来例では、光明丹等の顔料を成分とする塗料を歯面に塗布しておき、かみ合わせて歯当たり面を擦ることで塗料の付着量及び色を変化させ、この色の変化に基づいて歯当たりの良否を自動的に判定しようとする。
[課題1]しかしながら、上記従来例では、測定環境にばらつきがあると、歯当たり面の擦れによる塗料の色彩の変化を精度良く識別することができない、という不都合があった。例えば、塗料の塗布量や、塗料自体またはその色彩に変化があると、歯当たりによる色彩の変化を良好に捉えることができない、という不都合があった。
[課題2]さらに、上記従来例では、光明丹等の塗料の塗布量のばらつき、塗布後の時間経過による色の変化、照明の種類の変化や自然光の変化、外乱光の影響などによって塗料の色が変化すると、測定精度が不安定となってしまい、測定条件を均質化し測定精度を安定させることができない、という不都合があった。
すなわち、ノイズに強く、撮影した画像のみで判定可能な画像処理手法は、上記各文献に何ら開示されていない。
【0007】
[発明の目的]本発明の目的は、測定環境が変化しても歯当たり面を精度良く識別することにある。
【課題を解決するための手段】
【0008】
[着眼点]本発明の発明者は、塗布量や照明条件等が変化することで画像の明度(L)が変化すると色味(色相で特定される色の鮮やかさ)を示す彩度(S)が変化してしまう、という点に着目した。そして、歯当たり面を特定する前処理として、明度を安定させ色相の相違に応じた画像処理を工夫することで、上記課題を解決できるのではないか、との着想に至った。
【0009】
[課題解決手段1]実施例1に対応する第1群の本発明は、塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備えている。
そして、この歯当たり面検出部が、前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定処理と、前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成処理と、前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別処理とを備えた、という構成を採っている。
これにより、上記課題1を解決した。
【0010】
[課題解決手段2] 実施例2に対応する第2群の本発明は、第1群と同様に、カメラを備えている。
そして、課題解決手段2は、前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換部と、前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正処理部と、明度補正された前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備えた、という構成を採っている。
これにより、上記課題2を解決した。
【発明の効果】
【0011】
本発明は、本明細書の記載及び図面を考慮して各請求項記載の用語の意義を解釈し、各請求項に係る発明を認定すると、各請求項に係る発明は、上記背景技術等との関連において次の有利な効果を奏する。
【0012】
[発明の作用効果1] 課題解決手段1の歯当たり面検出装置は、色特徴値特定処理が、前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定し、色差データ生成処理が、前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成するため、歯当たりの程度に応じた色特徴値に基づいて人間の色覚に近い色差データを生成することができ、さらに、歯当たり面識別処理が、前記色差データのヒストグラムからしきい値を算出し、色差データを二値化することで前記歯当たり面を識別するため、歯当たり面の位置及び大きさを表す二値化データを良好に算出することができ、これにより、光明丹等の塗料の塗布と歯当たりとによる歯当たり面を安定して検出することができる。
特に、歯当たり面識別処理が、色差データのヒストグラムに基づいて歯当たり面を識別するため、測定環境に変化があっても、基準となる色特徴値からの色差として歯当たり面に生じる色彩の変化を捉えることができるため、塗料や塗料の色味に変化があっても、人間の色覚による検査と同様な精度で歯当たり面を識別することができる。
【0013】
[発明の作用効果2] 課題解決手段2の歯当たり面検出装置は、カラー座標変換部が、明度を算出し、明度補正処理部が、カラー画像の明度を予め定められた明度範囲内に向けて前記歯面の前記明度Lを補正するため、色相及び彩度を安定して好条件とすることができ、このため、照明条件や塗料の塗布量にかかわらず、歯当たり面を判定するための条件を均質化することができる。そして、明度補正により歯面部分の明度又は輝度を一定とすることで、色相及び彩度の感度を高め、定量化しやすい条件を確保し、歯当たり面の測定精度を安定させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態の構成例を示すブロック図である。(実施例1から3)
【図2】本発明の実施例1の構成例を示すブロック図である。(実施例1)
【図3】図3(A)から(C)は測定歯の一例を示す説明図である。(実施例1から3)
【図4】本発明の実施例2の構成例を示すブロック図である。(実施例2)
【図5】輝度と彩度との関係例を示すグラフ図である。(実施例2及び3)
【図6】輝度と色相との関係例を示すグラフ図である。(実施例2及び3)
【図7】本発明の実施例3の構成例を示すブロック図である。(実施例3)
【図8】実施例3のハードウエア資源の構成例を示すブロック図である。(実施例3)
【図9】実施例3の処理工程の一例を示すフローチャートである。(実施例3)
【図10】図10(A)は明度57の原画像の一例を示す図で、図10(B)は原画像から歯当たり面を抽出した一例を示す図である。(実施例1から3)
【図11】図10(A)に示す原画像のヒストグラムの一例を示す説明図である。(実施例1から3)
【図12】図10(A)に示す原画像の色差データを二値化した二値化画像の一例を示す説明図である。(実施例1から3)
【図13】図13(A)は明度40の原画像の一例を示す図で、図13(B)は原画像から歯当たり面を抽出した一例を示す図で、図13(C)は明度による補正後の補正画像から歯当たり面を抽出した一例を示す図である。(実施例1から3)
【図14】図13(A)に示す原画像のヒストグラムの一例を示す説明図である。(実施例1から3)
【図15】図13(A)に示す原画像の色差データを二値化した二値化画像の一例を示す説明図である。(実施例1から3)
【図16】図16(A)は明度67の原画像の一例を示す図で、図16(B)は原画像から歯当たり面を抽出した一例を示す図である。(実施例1から3)
【図17】図16(A)に示す原画像のヒストグラムの一例を示す説明図である。(実施例1から3)
【図18】図16(A)に示す原画像の色差データを二値化した二値化画像の一例を示す説明図である。(実施例1から3)
【発明を実施するための形態】
【0015】
発明を実施するための形態として、3つの実施例を開示する。実施例1は歯当たり面検出部14を有する歯当たり面検出装置であり、実施例2は明度補正処理部28を有する歯当たり面検出装置であり、実施例3は歯当たり面検出部14と明度補正処理部28との両方を有する歯当たり面検出装置である。実施例1から3までを含めて実施形態という。
【0016】
本実施形態の検出対象は種々の歯車の歯当たり面46であり、特定の歯車に限定されず、多様な歯車の多様な歯当たり面46を検出対象とすることができる。そして、歯車の歯面42が金属であると、より良好に検出することができ、特に、多数の歯面42での歯当たりの程度が均質であるか否か等の検査に用いることもできる。
【0017】
図1を参照すると、歯当たり面検出装置は、四輪車の駆動車輪に用いられるデファレンシャル(デフ,差動装置)のファイナル・ギア(リングギア96)の歯面42を検出対象としている。図示の例はスパイラル・ベベルギアである。
歯当たり面検出装置は、塗料40が塗布された歯面42を撮像するカメラ12と、当該歯面42を照明する照明機器13とを備え、そして、実施例に応じて、歯当たり面検出部14と、明度補正処理部28との一方または両方を備える。
【0018】
差動装置は、四輪車の右左折等の回転に際して、その回転半径に応じて、左右の駆動輪の回転数を変化させる機構であり、FRのプロペラシャフトやFFのトランスミッション等の駆動入力91と、左右のドライブシャフト92との間に設けられる。差動装置は、駆動入力91となるドライブピニオン90とかみ合うリングギア96と、このリングギア96と一体に回転するディファレンシャルケース94と、この駆動入力91に応じたディファレンシャルケース94の回転を公転としてディファレンシャルケース94内で左右のドライブシャフト92(アクスルシャフト)毎に自転するピニオンギア及びサイドギア(図示せず)とを備えている。左右のサイドギアは、公転しつつ自転により左右の車輪に与えられる抵抗に応じた自転をし、ドライブシャフト92に回転力を伝達する。
【0019】
そして、ディファレンシャルケース94は、ギアキャリア98に回動可能に支持されている。ディファレンシャルケース94のリングギア96は、多数の歯面42を有する。このリングギア96の歯面42がドライブピニオン90とかみ合うことで、駆動入力91がドライブシャフト92及び駆動輪に伝達される。このため、リングギア96の噛み合わせ面(歯面42)の良否が性能の安定に重要である。
【0020】
本実施形態の歯当たり面検出装置は、例えば、このようなリングギア96の歯面42での歯当たり面46を検出し、歯当たり面46の面積や、重心位置や、予め定められた面積や重心位置との差や、歯当たりの程度等を算出する。そして、通常の歯車の歯面42の他、スパイラル・ベベルギアのように歯面42の形状が複雑な歯車であっても、その歯当たり面46を検出することができる。
【0021】
本実施形態では、歯面42に塗料40を塗布した後にリングギア96とドライブピニオン90とをかみ合わせることで、歯当たり面46の塗料40を擦り、この擦り(当たり)により変色した塗料40の状態を画像処理により識別する。塗料40としては、彩度の高い無機顔料からなる粒径が微細な粉体が好ましく、例えば、赤色顔料である光明丹を使用することができる。光明丹は、鉛丹ともいわれ、四酸化鉛を主成分とし、当たりの検査にて従前より活用されている。また、鉛ではなく、粒径が微細な他の顔料を使用しても良い。
【0022】
人間の色覚は、全ての色について同一の分解能を有するのではなく、赤からオレンジに至る色彩の識別力が高いため、赤色の顔料である光明丹を用いると、微妙な色の変化を目視検査により高い分解能で識別することができる。
【0023】
そして、本実施形態では、当たりによる塗料40の変色の状態をカメラ12で撮像し、このカラー画像52をデジタル処理することで、歯当たり面46を検出する。カラー画像52をデジタル処理する前提として、従来例では、単純に、RGB(レッドR、グリーンG、ブルーB)の表色系を使用しているが、本実施形態では、色差δや、簡易色差Δを算出するために、RGBではない表色系をも使用する。
【0024】
色を定量的に表すことを表色といい、表色のための体系を表色系という。表色系には、色表その他物体の色を表す顕色系と、色の混色による等色を基準として色を表す混色系とがある。混色系には、モニター等の光源光の特定に有用な加法混色と、印刷物等の物体光の特定に有用な減法混色とがある。加法混色では、RGBが用いられ、減法混色では、CMYK(シアン、イエロー、マゼンタ、ブラック)が多用されている。
【0025】
顕色系としては、人間の感覚に基づいて色表を並べたマンセル表色系がある。マンセル表色系は、明度(マンセルバリューV)を縦軸に、色相(マンセルヒューH)を円周方向に、彩度(マンセルクロマC)を半径方向とし、色を「色相 明度/彩度」で表す。例えば、JIS慣用色名での赤は「5R 4/14」と表される。マンセル表色系は、色相の値毎に、明るさを特定する明度と、色の鮮やかさを特定する彩度とにより色を表すため、色と色との間の差(色差)を人間の感覚に近くすることができる。しかし、色表を用いるため、色表と色表との間の色を定量化することが難しい。
【0026】
混色系では、RGB等の刺激値の組み合わせにより、多様な色を表現することができる。この原刺激値の組み合わせを等色関数という。等色関数を使用すれば、原刺激値を用いて、任意の色を精度良く特定することができる。しかし、RGB表色系では、Rについて負の混色が生じてしまい、取扱が難しくなるため、負の混色を生じさせない原刺激値XYZを定め、XYZ表色系が定義された。XYZ表色系や、xy色度図は色の定量化によく利用されている。また、これら各種表色系でのそれぞれの刺激値の組み合わせによる色の取扱を色空間ともいう。
【0027】
XYZ表色系では、その色空間内の距離が人間の感覚による色差に対応せず、xy色度図での距離として求めた色差は、知覚的には均等とならない。中心色と等色の範囲を示す楕円をアクアダム楕円といい、xy色度図にこのアクアダム楕円を重ねると、xy色度図の座標によって楕円の大きさが異なってしまう。
【0028】
この色差は、等色関数とは異なり非線形であり、均等色空間の定義は困難であるが、明度を含んだ均等色空間として、XYZを原刺激値として、それぞれ三次元直交座標を用いたL*a*b*色空間とL*u*v*色空間とが提案されている。L*は明度を表し、a*b*と、u*v*とは色相と彩度からなる色知覚の属性を表す。L*a*b*色空間はマンセル表色系と対応するように組み立てられており、L*u*v*色空間はアクアダム楕円との対応が良い。この均等色空間では、空間内の距離を人間の感覚に近い色差とすることができる。
【0029】
コンピュータ・グラフィックスでは、上記色彩学での表色系ではないが、HSL表色系と、HSB表色系とが用いられている。このカラーモデルは、マンセル表色系と類似しており、色を3軸で表している。HSB表色系では、色相(ヒューH)、彩度(サチュレーションS)、輝度(ブライトネスB)の3軸、HSL表色系では輝度Bに代えて明度(ライトネスL)としている。色相は、色の系統を360度の角度で表し、マンセル表色系と同様な色相環となる。彩度は、0%から100%までの値で表現され、0%は無彩色、100%はその色相及び明度において最も鮮やかな色である。明度は明るさのレベルを示し、0%は黒、100%がその色相及び彩度において最も明るい状態を示す。
【0030】
RGBで撮影されたカラー画像52は、予め定められた算式を用いてHSL表色系に変換することができる。また、HSL表色系や、HSB表色系は、マンセル表色系と類似しており、そのHSL表色系の空間での距離を色差として扱いやすいという特徴がある。
【実施例1】
【0031】
<1歯当たり面検出装置:変化対応>
<1.1色差データ>
本実施形態の実施例1を開示する。実施例1は、歯当たり面46を精度良く識別するために、色差データ56に基づく情報処理をするものである。
【0032】
歯当たり面検出装置は、その主要な要素として、カメラ12と、歯当たり面検出部14とを備え、歯当たり面検出部14は、前記カラー画像52に基づいて、前記歯面42での歯当たり面46を検出する。このために、歯当たり面検出部14が、色特徴値特定処理16と、色差データ生成処理18と、歯当たり面識別処理20とを備えている。
【0033】
図2に示す例では、歯当たり面検出装置14は、さらに、照明機器13を備えている。そして、測定対象物である歯面42には、塗料40が塗布されており、歯車の当たりによって、歯面42の歯当たり面46にて塗料40の色味が変化している。
【0034】
カメラ12は、この塗料40が塗布された歯面42をカラーで撮像してカラー画像52を生成する。カラー画像52は、例えば、RGB表色系でのデータであり、1画素について、レッドRの値と、グリーンGの値と、ブルーBの値とを有する。
好ましい例では、照明機器13が、予め定められた明るさで予め定められたスペクトル成分の照明光を照射し、カメラ12が、歯面42で照明光が反射した反射光を受光し、カラー画像52とすると良い。照明機器13としてハロゲンランプやキセノンランプ等を用いることで、照明光のスペクトル成分を自然光に近い白色光とすると、歯面42の色彩を正確にカラー画像52とすることができる。蛍光灯等を使用する際には、塗料40の色によっては、蛍光灯のスペクトルに応じた補正をすると良い。
【0035】
歯当たり面検出部14の色特徴値特定処理16は、前記カラー画像52から前記歯面42の色の特徴値となる色特徴値54を特定する。色特徴値54は、色差データ56を算出する基準となる色であり、撮像されたカラー画像52から求めると良い。本実施例では、光明丹等の塗料40を塗布した段階では、塗料40の色は明るく鮮やかであり、歯当たりの生じた部分は濃く暗い色味となる。色特徴値54は、この歯当たりの有無に応じた塗料40の色差δを検出しやすい特徴値とすると良い。色特徴値54としては、例えば、塗料40が塗布された面のうち、最も濃く暗い部分の色や、最も明るい部分の色とすると良い。最も濃い部分の色は明度Lと彩度Sとの和が最大となる画素の色で、最も明るい部分の色は明度Lと彩度Sとの和が最小となる画素の色とすることができる。最も明るい色は照明環境等に依存して変化しやすい傾向があるため、色特徴値54及び色差δを安定させるには、濃い部分の色を色特徴値54とすることが望ましい。
【0036】
色差データ生成処理18は、前記歯面42の各カラー値について前記色特徴値54との色差δを算出することで色差データ56を生成する。色差δは、表色系による色空間での色の値を座標値とした際に、2色の座標値の間の距離で近似することができる。カラー画像52の色空間をL*a*b*色空間やL*u*v*色空間とすると、人間の色覚に近い色差δを扱うことができる。また、HSB色空間やHSL(LHS)色空間としても、色空間内の距離を比較的人間の色覚に近い色差δとして扱うことができる。そして、歯面42の全てのカラー値について、この色差δを算出したデータを色差データ56という。この色差δに基づいた色差データ56を使用すると、人間の色覚に近いデータを定量化できるため、従前の目視による検査手法と対比し、整合させやすい。
また、色差データ56は、色の差を数値で表したもので、1チャンネルのデータであり、可視化すると、グレースケール(濃淡画像)とすることができる。
【0037】
歯当たり面識別処理20は、前記色差データ56のヒストグラム58からしきい値62を算出する。色差データ56は、色特徴値54からの距離を示すデータであり、色特徴値54を濃い色とすると、歯面42のうち、濃く暗い部分への距離が近く小さい数値で、明るく鮮やかな部分への距離が遠く大きい数値となる。この1チャンネルのデータはヒストグラム58を得ることができ、歯当たりが生じて濃く暗い部分と、歯当たりしていない明るい鮮やかな部分とを切り分けることができる。例えば、判別分析法を用いると、明るい部分を背景として、抽出すべき暗い部分と背景とのしきい値62を求めることができる。
【0038】
歯当たり面識別処理20は、このしきい値62を用いて、色差データ56を二値化することで前記歯当たり面46を識別する。ヒストグラム58から得たしきい値62を用いて色差データ56を二値化すると、歯当たり面46のみを抽出した二値化データ60を得ることができる。この二値化データ60を使用すると、歯当たり面46の位置、大きさ(面積)及び形状の特徴を画像処理により検出することができる。
【0039】
図3(A)にカラー画像52をRGBとした際のブルーBチャンネル画像の一例を、図3(B)にレッドRチャンネルの一例をそれぞれグレースケール化して示す。図3(C)に、測定歯50の歯面42の測定結果の一例を示す。
図3を参照すると、リングギア96は、歯車の側面となる歯面42と、歯車の上部となる歯先44とを有している。そして、歯面42は、歯当たりが生じた歯当たり面46と、歯面42のうち歯当たり面46以外の部分である非歯当たり面48とを有している。歯当たりは、1回か又は複数回である。また、歯当たりに際して歯面42に加えられる力も均一ではないため、歯当たりの強度は歯面48の位置に応じて異なる。しかし、歯当たりの試験の結果として、歯当たりが生じた歯当たり面46と、若干の歯当たりがあった部分を含む非歯当たり面48とを区分することができる。
【0040】
図3(A)及び(B)に示す例では、測定歯50を特定するために、歯先44の形状の特徴を利用したパターンマッチングを用いている。リングギア96を回転させながらカラー画像52を撮像し、上下の歯先44に挟まれた歯面42を測定歯50として抽出する。歯当たり面検出部14は、図3(C)に示すように、測定歯50を抽出すると、色特徴値特定処理16、色差データ生成処理18及び歯当たり面識別処理20とにより、歯当たり面46を抽出する。
【0041】
次に、色差データ56の具体的な計算手法を説明する。好ましい例では、カラー画像52をHSL(LHS)表色系で表色し、前記カラー画像52の各カラー値を明度L、色相H、彩度Sで表す。そして、前記色差データ生成処理18が、前記色特徴値54のカラー値を明度Lo、色相Ho、彩度Soとしたとき、次式(1)の色差算出式で前記色差δを算出する。次式(1)では、HSL色空間内での距離を色差δとするため、RGB色空間での距離による色差と比較して、人間の色覚に近い色差データ56を生成することができる。そして、式(1)を用いて人間の色覚に近い色差データ56は、歯当たりの強度と関連性が高く、このため、精度の高い検出をすることができる。
【0042】
【数1】
【0043】
また、別の好ましい例では、前記色差データ生成処理18が、前記色特徴値54のカラー値を明度Lo、色相Ho、彩度Soとし、係数をα、β及びγとしたとき、次式(2)の簡易色差算出式で簡易色差Δを算出する。簡易色差Δの算出では、数値の引き算とかけ算と足し算のみで簡易色差Δを求めることができるため、色差データ56を高速に算出することができる。そして、係数α,β及びγを調整することで、塗料40の色彩に応じて実用上問題のない簡易な色差データ56を算出することができる。また、光明丹を使用する例では、α=β=γ=1としても一定の精度で検出することができる。係数α,β及びγを調整する際には、式(1)で算出した色差群を目標値として、最小自乗法等を用いて係数の値を最適化するようにしても良い。
【0044】
【数2】
【0045】
・1.1色差データの効果
上述のように、色特徴値特定処理16が、前記カラー画像52から前記歯面42の色の特徴値となる色特徴値54を特定すし、色差データ生成処理18が、前記歯面42の各カラー値について前記色特徴値54との色差δを算出することで色差データ56を生成するため、歯当たりの程度に応じた色特徴値54に基づいて人間の色覚に近い色差データ56を生成することができ、さらに、歯当たり面識別処理20が、前記色差データ56のヒストグラム58からしきい値62を算出し、色差データ56を二値化することで前記歯当たり面46を識別するため、光明丹等の塗料40の塗布と歯当たりとによる歯当たり面46を良好に検出することができる。
【0046】
また、色差データ56の使用により、歯当たりによる色味の変化を良好に反映したデータを得ることができ、そして、色差データ56のヒストグラム58から二値化するため、背景となる非歯当たり面48を分離し、歯当たり面46を安定して検出することができる。
【0047】
そして、色差δの算出では、HSL色空間を使用し、色空間内での距離を色差δとすると、人間の色覚に近い定量化が可能となり、従来の目視による検査との整合性を保ち、従前の検査のノウハウを活用しつつ、画像処理による安定した検出をすることができる。
また、簡易色差Δを算出する例では、計算を簡略化し、高速な処理により歯当たり面46を検出することが可能となる。
【実施例2】
【0048】
<2歯当たり面検出装置:均質化>
<2.1明度補正>
次に、本実施形態の実施例2を開示する。実施例2は、測定条件を均質化するために、予め定められた明度範囲68を目標として明度補正をするものである。
【0049】
歯当たり面検出装置は、その主要な要素として、カメラ12と、カラー座標変換部26と、明度補正処理部28と、歯当たり面検出部14とを備えている。そして、好ましい例では、カメラ12が、ゲイン調整部32を備え、明度補正処理部28が、ゲイン調整処理34とを備えると良い。
【0050】
図4に示す例では、カメラ12は、塗料40が塗布された歯面42をカラーで撮像してカラー画像52を生成する。画像処理部24内のカラー座標変換部26は、前記カラー画像52の表色系(色空間)を変換して当該カラー画像52の明度を算出する。変換前の色空間としてはRGB色空間があり、変換後の色空間としてはHSL色空間やHSB色空間がある。また、変換後の色空間としては、L*a*b*色空間やL*u*v*色空間を採用しても良い。明度Lは、色空間によっては、輝度Bという名称となる。明度Lは、色相や彩度とは異なる色味の無い値で、白から黒までの明るさを与える値である。
【0051】
明度補正処理部28は、前記カラー画像52の前記明度Lを予め定められた明度範囲68内に向けて前記歯面42の前記明度L又は輝度を補正する。明度範囲68は、明度Lの中間値(例えば、0(%)から100(%)であれば50(%))から若干明るめの範囲、例えば、HSL色空間の明度Lでは50から60の範囲とすると良い。HSL空間にて明度補正する際には、各画素の明度を(55/L)倍することで、明度Lの中心値を55近傍に補正し、これにより、明度Lを予め定められた明度範囲68内となるように補正する。RGB色空間にて明度補正する際には、RGB各チャンネルの輝度値を(55/L)倍すると良い。この倍率は、分子及び分母が明度(通常の数値またはパーセントで示される比率)で無次元の比率である。分子は、明度範囲68の中心値とし、分母は、カラー画像52の明度とすると良い。この比率を明度補正比率という。明度補正比率は、中心値(例えば、55)より明るい明度値を暗めに、中心値より暗い明度値を明るめに補正する役割を果たす。
【0052】
歯当たり面検出部14は、明度補正された前記カラー画像52に基づいて前記歯面42での歯当たり面46を検出する。明度補正されると、色相H及び彩度Sのズレが小さく、歯当たり面46の色味に応じた検出を良好に行うことができる。
【0053】
図5に、明度Lと彩度Sとの相関関係を示す。この例では、照明条件とカメラ12の絞りを変えて、例1から例3について測定歯50を撮影し、歯当たり面46の全体の明度L及び彩度Sを計算した。図5に示すように、明度L = 60 近傍で彩度Sが最大となる。彩度Sが大きくなると、歯当たり面46と非歯当たり面48との色差δが大きくなり、すると、歯当たり面46の識別が容易になる。
そして、明度L = 50 を超えると識別が容易になる。さらに、明度L = 60 を超えると、色飛び(RGBチャンネルの一部がレンジオーバ)が生じてしまい、彩度Sが低下し、歯当たり面46の識別が難しくなる。
【0054】
図6に、明度Lと色相Hとの相関関係を示す。そして、明度L = 50から60の条件で、比較的一定の値となっている。一方、明度Lがこの条件を外れると、色相Hが変化し、実際の色とカラー画像52での色とが異なる色となってしまう。
【0055】
図5及び図6に示すように、明度L = 50から60の条件が最適であり、明度範囲68を50から60の範囲とし、中央値を55とすると良い。このため、明度補正処理部28は、カラー画像52の明度Lを中央値L=55(ア5)となるように明度を補正すると良い。
【0056】
・2.1明度補正の効果
上述のように、カラー座標変換部26が、カラー画像52の明度Lを算出し、明度補正処理部28が、カラー画像52の明度Lを予め定められた明度範囲68内に向けて前記歯面42の前記明度Lを補正するため、色相及び彩度を安定して好条件とすることができ、このため、照明条件や塗料40の塗布量にかかわらず、歯当たり面46を判定するための条件を均質化することで、測定精度を安定させることができる。
【0057】
<2.2ゲイン調整>
再度図4を参照すると、カメラ12が、撮像のゲインを調整するゲイン調整部32を備えている。そして、明度補正処理部28は、前記カラー画像52の明度Lが前記明度範囲68外の際に、前記ゲインの調整を制御するゲイン調整処理34を備えている。
ゲイン調整部32は、例えば、カメラ12の画像入力ボード74のゲイン調整機能であり、また、照明機器13の光量の自動調整や、カメラ12の搾りの自動調整としても良い。
【0058】
ゲイン調整処理34は、例えば、カラー画像52の全体や、または歯面42の部分の明度Lの平均値や中央値を求めてこの明度が予め定められた明度値(例えば、60)より大きい場合や、カラー画像52全体または歯面42の明度Lの内最大の明度が予め定められた明度値(例えば、65)より大きい場合に、不良のカラー画像52と判定し、ゲインを再調整した撮像を制御すると良い。
【0059】
カラー画像52の良否判定のしきい値62は、測定対象及び塗料40の色相や最大の彩度等に応じて、図4及び図5に示す相関関係のデータ等を用いて定めると良い。このゲイン調整により、RGBの各チャンネルの何れかでオーバーフローが生じ、明度補正処理では均質な画像を得ることができない場合などに、再撮影を制御することができる。
また、ゲイン調整後に再撮影したカラー画像52について、さらに、明度範囲68に向けた明度補正処理をすると、より均質化した一定条件での検出をすることができる。
【0060】
・2.2ゲイン調整の効果
上述のように、カラー画像52の明度Lが前記明度範囲68外の際に、ゲイン調整処理34が前記ゲインの調整を制御し、この制御に従ってゲイン調整部32がカメラ12や照明機器13等の撮像のゲインを調整し、再撮影するため、カラー画像52が明るすぎてオーバーフローが生じ、色彩の再現性が悪化し、明度補正では均質さを取り戻せない場合には、ゲインを調整した再撮影によりカラー画像52の明度の範囲を一定範囲とすることができる。そして、このゲイン調整により、低精度での歯当たりの判定を事前に除外し、さらに、日射量等の照明環境の変化があっても検出精度を安定させることができる。
このように、撮影条件等に変化があっても、オーバーフローの悪影響を事前に除外し、カラー画像52を均質化することができる。従って、歯当たり面46の検出について、熟練者による判定よりも高精度な定量化をすることができる。
【実施例3】
【0061】
<3歯当たり面検出装置:変化対応及び均質化>
<3.1明度及び色差>
さらに、実施例3を開示する。実施例3は、歯当たりの大きさや位置を精度良く安定して検出するために、カラー画像52の色相及び彩度の情報を最大限活用しようとするものである。
【0062】
歯当たり面検出装置は、その主要な要素として、カメラ12と、カラー座標変換部26と、明度補正処理部28と、歯当たり面検出部14とを備えている。そして、歯当たり面検出部14は、色特徴値特定処理16と、色差データ生成処理18と、歯当たり面識別処理20とを備えている。また、好ましい例では、ゲイン調整部32と、ゲイン調整処理34とを備えると良い。
【0063】
図7に示す例では、カメラ12は、塗料40が塗布された歯面42をカラーで撮像してカラー画像52を生成する。そして、カラー座標変換部26は、カラー画像52の色空間を変換して当該カラー画像52の明度Lを算出する。明度補正処理部28は、カラー画像52の前記明度Lを予め定められた明度範囲68内に向けて前記歯面42の前記明度L又は輝度を補正する。例えば、特徴的な明度値をL1としたとき、カラー画像52の各画素の明度Lに実施例2に開示した(55/L1)を掛けることで補正する。このような明度補正により、撮影環境や塗料40の塗布量等の変化があってもカラー画像52での色の再現性を均質にすることができる。
【0064】
そして、歯当たり面検出部14は、明度補正された前記カラー画像52に基づいて前記歯面42での歯当たり面46を検出する。この際に、色特徴値特定処理16は、前記カラー画像52から前記歯面42の色の特徴値となる色特徴値54を特定する。色特徴値54は、例えば、実施例1にて開示した塗料40の最も濃い部分(明度Lと彩度Sとの和が最大となる点)とすると良い。そして、色差データ生成処理18は、前記歯面42の各カラー値について前記色特徴値54との色差δを算出することで色差データ56を生成する。色差δは、上述した式(1)を使用して色空間内の距離として求めることができる。また、式(2)による簡易色差Δを使用しても良い。
【0065】
歯当たり面識別処理20は、前記色差データ56のヒストグラム58からしきい値62を算出すると共に、当該色差データ56を二値化することで、前記歯当たり面46を識別する。また、画像処理部24は、測定対象となる歯面42を抽出するためのパターンマッチング等の画像処理をする。例えば、画像処理部24は、カラー画像52を微分処理して画像中のエッジを抽出し、このエッジを予め定められたパターンと比較することで、画像中の対象となるエッジを特定する。
【0066】
図8に歯当たり面検出装置のハードウエア資源の構成例を示す。図8に示す例では、カメラ12で撮像する画像を調整してCPU72に入力する画像入力ボード74と、演算をするCPU72と、CPU72に記憶空間を提供する主記憶装置76と、不揮発性のハードディスク等の補助記憶装置78と、測定対象となる歯面42を備えている。
【0067】
画像入力ボード74は、カラー画像52のゲインを調整するゲイン調整部32として機能する。また、カラー画像52の表色系(色空間)を変換する機能を有するようにしても良い。CPU72は、予め導入された歯当たり面検出用プログラムを実行することで、図7に示す明度補正処理部28や歯当たり面検出部14として機能する。また、CPU72は、カラー座標変換部26として機能するように構成しても良い。主記憶装置76はCPU72の一次記憶装置であり、プログラムやデータを一時的に格納する。補助記憶装置78は、例えばハードディスクであり、歯当たり面検出用プログラムデータや、予め定められた明度範囲68の中心値や、画像処理によるパターンマッチングに使用するパターンデータや、歯当たり面46の重心位置及び面積についての許容範囲等を記憶する。駆動機構80は、塗料40を塗布した歯車(例えば、リングギア96)を回転させることで歯当たりを生じさせる。さらに、駆動機構80は、歯面42のカメラ12に対する相対的な位置を位置決めする際に当該歯車を回転させる。
【0068】
図9に実施例3の測定フローの一例を示す。歯当たり面検出装置を起動し(ステップS1)、塗布された塗料40、例えば光明丹を検出する(ステップS2)。次に、駆動機構80を制御してリングギア96を回転させ、歯合わせをする(ステップS3)。
【0069】
歯合わせにより歯当たりをさせた後、歯面42を撮影するために、歯面42の位置決めをする。すなわち、まず、画像処理部24は、パターンマッチングにより歯先44の位置を検出し(ステップS4)、歯先44の位置が許容範囲内であるか否かを確認する(ステップS5)。許容範囲内でなければ、駆動機構80を制御してリングギア96を回転させ、再度位置決めする。許容範囲内であれば、カメラ12を制御して、歯面42を撮影する(ステップS6,撮像工程)。
【0070】
次に、カラー画像52をRGBチャンネルに分解し(ステップS7)RGBそれぞれの値を用いて、HSL色空間(LHS色空間)に座標変換し、明度Lと、彩度Sと、色相Hとを算出する(ステップS8,カラー座標変換工程)。
【0071】
色の違いを識別する場合、明度L = 50 辺りの感度が高いことが知られている。明度Lが低い場合は、色の識別が難しく、高すぎる場合は色飛び(RGBのいずれかのチャンネルがレンジオーバすること)により色相Hがずれてしまうことがある。そこで、党明度Lが55近傍(55ア5)媒になるように、カメラ12および画像入力ボード74のゲインを自動補正し、再撮影する。すなわち、ゲイン調整処理34は、HSL色空間での明度Lの値に基づいて、カラー画像52の良否を判定し、不良の際には再撮影する。
【0072】
具体的には、カラー画像52の明度Lが、予め定められた明度範囲68外の場合に、カラー画像52の不良として、ゲインを調整し(ステップS10)、再度撮影する(ステップS6)。明度範囲68は、例えば、50から60である。カラー画像52の特徴的な明度L1としては、カラー画像52中の明度の最大値や、平均値や、中央値や、最小値などを使用することができる。
【0073】
次に、HSLの明度LかRGB各チャンネルの輝度を(55/L1)倍することにより明度L=55に向けてソフト上で明度補正する(ステップS11,明度補正工程)。明度Lの基準を一定とすることで、照明条件、光明丹の塗付量の差による濃淡の影響を軽減し、カラー画像52を均質とすることができる。
【0074】
そして、歯面42の輪郭データを補助記憶装置78から読み出し(ステップS13)、パターンマッチングにより測定対象の歯面42を検出する(ステップS13)。この歯面42の検出により、歯面42中の歯当たり面46と非歯当たり面48のみのデータを抽出することができる。続いて、色差データ56を算出する。具体的には、まず、光明丹の最も濃い部分(L,Sの和が最大となる点)を色特徴値54として選出し、基準点0とし、明度基準値Lo、色相基準値Ho、彩度基準値Soを算出する(ステップS14,色特徴値特定工程)。
【0075】
次に、色差データ生成処理18は、カラー画像52の各ピクセルの明度L、色相H、彩度Sの値から、上述した式(1)により色差δを算出する(ステップS15,色差データ生成工程)。また、式(2)により簡易色差Δを算出しても良い。色差δ又は簡易色差Δを256階調へ換算して濃淡モノクロ画像(グレースケール)へ変換し、明度L=55一定とすることにより、色差をより明確にした画像を算出し、歯当たり面46の識別を容易とすることができる。明度Lの条件をほぼ一定にすることにより、歯当たり面46と非歯当たり面48の識別が定量的に再現可能となる。
【0076】
続いて、歯当たり面識別処理20は、濃淡モノクロ画像とした色差データ56に基づいて、判別分析法による二値化手法を用いて、歯当たり面46の候補を抽出する(ステップS17,歯当たり面識別工程)。複数領域の候補がある場合、上歯と下歯とについて同様の処理を行い、同位置に存在する領域を歯当たり面46とする。歯当たり面46を検出すると、この歯当たり面46の重心位置及び面積を算出し(ステップS18)、補助記憶装置78から予め定められた重心位置及び面積の許容値を読み出して(ステップS19)、比較することで、歯当たり面46の良否を判定する(ステップS20)。
【0077】
重心位置は、歯当たり面46に含まれる各ピクセルのx座標値の平均値と、y座標値の平均値とにより求めることができ、重心位置の許容値は一定範囲の座標値とすることができる。歯当たり面46の面積は、歯当たり面46に含まれるピクセル(画素)の数とすることができ、面積の許容値をピクセル数での範囲とすることができる。カラー画像52及び色差データ56の各ピクセルの大きさと、実空間での大きさとをスケール値で対応させることができ、このスケール値を予め測定しておくと、重心位置及び面積とそれらの許容値とを実空間での長さ及び広さとすることができる。
【0078】
この図9に示す工程は、CPU72が歯当たり面検出用プログラムを実行することで実現することができる。
【0079】
図10(A)は明度L = 57 の原画像の一例を示す図で、図10(B)は原画像から歯当たり面46を抽出した一例を示す図である。図10に示す例では、明度57であり、予め定められた明度範囲68内であるため、明度補正を必要としない。図10(A)に示すように、リングギア96の歯面42と歯先44とが撮影され、そのうちの1歯が測定歯50となる。図10(A)に示す原画像から歯当たり面46を抽出すると、図10(B)に示す例となる。
【0080】
図11は、図10(A)に示す明度L = 57 の原画像のヒストグラム58の一例を示す説明図であり、図12は、図10(A)に示す原画像の色差データ56を二値化した二値化画像の一例を示す説明図である。測定歯50の歯面42のデータを抽出し、色差データ56をグレースケール化すると、図11に示すように、判別分析に適した2つのピークを得ることができる。すなわち、色差データ56は、背景部分(非歯当たり面48に属する階調値のグループ)と特徴部分(歯当たり面46に属する階調値のグループ)とに別れ、2つのピークの谷部分の値(図11に示す例では、値145)をしきい値62として二値化すると、特徴部分(歯当たり面46)のみを抽出することができる。
【0081】
すなわち、図11及び図12に示すように、明度57の場合、色差データ56のヒストグラム58は、背景部分と特徴部分とがしきい値62(値145)にて明確に切り分けられ、このしきい値62で色差データ56を二値化すると、図12に示すように、歯当たり面46を良好に検出することができる。そして、この二値化データ60を使用すると、歯当たり面46の重心位置及び面積を計算でき、その値も実際の歯当たり面46と良く対応したものとなっている。
【0082】
図13(A)は、図10(A)と同一の対象について、明度L = 40 である原画像の一例を示す図であり、輝度が低く明度補正が必要となる。図13(B)は原画像から歯当たり面46を抽出した一例を示す図で、測定歯50の歯当たり面46が大きめに検出されている。明度L = 40 の原画像のように明度が低いと、最適な図10(B)と比較して、識別した領域は、実際の歯当たり面46より広がる傾向がある。図13(C)は明度Lによる輝度値の補正後の色差データ56から歯当たり面46を抽出した一例を示す図で、歯当たり面46の重心位置及び面積を良好に抽出している。この図13(C)に示す補正は、カラー画像52のRGB各チャンネルを定数倍するという輝度補正をした結果であり、図10(B)に近い領域を検出できている。
【0083】
図14は、図13(A)に示す原画像のヒストグラム58の一例を示す説明図であり、図15は、図13(A)に示す色差データ56を二値化した二値化画像の一例を示す説明図であり、明度40と暗いカラー画像52によるため、特徴部分となる歯当たり面46が実際より大きめに抽出されている。一方、明度補正をすると、図13(C)に示すように、適正明度である図10(B)に示す場合とほぼ同様に歯当たり面46を検出することができる。
【0084】
図16(A)は明度67の原画像の一例を示す図で、図16(B)は原画像から歯当たり面46を抽出した一例を示す図である。図16に示す例では、明度L = 67 であり、輝度が高すぎ明度補正をすることができない。図17は、図16(B)に示す原画像のヒストグラム58の一例を示す説明図であり、図18は、図16(B)に示す原画像の色差データ56を二値化した二値化画像の一例を示す説明図である。図16(A)に示すように明度が高すぎる場合は、Rチャンネルのレンジオーバにより歯当たり面46が不鮮明となる。そして、ヒストグラム58のピークが消滅し、歯当たり面46の識別が難しくなってしまう。このため、明度補正による修正が不可能とし、画像入力ボード74のゲインを下げての再撮影とすると良い。
【0085】
・3.1明度及び色差の効果
上述のように、RGBでのカラー画像52をHSL空間に変換し、明度Lが予め定められた明度範囲68となるように明度補正をし、その後に色差データ56を算出し、この色差データ56に基づいて歯当たり面46を抽出するため、照明の照度条件、光明丹の濃淡の影響を軽減でき、色差を識別できる感度を高くすることができる。これらにより、歯当たり面を正確に識別し、特に、面積・重心位置を安定して測定することができる。
【符号の説明】
【0086】
12 カメラ
13 照明機器
14 歯当たり面検出部
16 色特徴値特定処理
18 色差データ生成処理
20 歯当たり面識別処理
24 画像処理部
26 カラー座標変換部
28 明度補正処理部
32 ゲイン調整部
34 ゲイン調整処理
40 塗料
42 歯面
44 歯先
46 歯当たり面
48 非歯当たり面
50 測定歯
52 カラー画像
54 色特徴値
56 色差データ
58 ヒストグラム
60 二値化データ
62 しきい値
68 明度範囲
72 CPU
74 画像入力ボード
76 主記憶装置
78 補助記憶装置
80 駆動機構
90 ドライブピニオン
91 駆動入力
92 ドライブシャフト
94 ディファレンシャルケース
96 リングギア
98 ギアキャリア
δ 色差
Δ 簡易色差
L 明度
H 色相
S 彩度
【特許請求の範囲】
【請求項1】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、
前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備え、
この歯当たり面検出部が、
前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定処理と、
前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成処理と、
前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別処理と、を備えた、
ことを特徴とする歯当たり面検出装置。
【請求項2】
前記色差データ生成処理が、前記カラー画像の各カラー値を明度L、色相H、彩度S、前記色特徴値のカラー値を明度Lo、色相Ho、彩度Soとしたとき、次式(1)
【数1】
で前記色差を算出することを特徴とする請求項1記載の歯当たり面検出装置。
【請求項3】
前記色差データ生成処理が、前記カラー画像の各カラー値を明度L、色相H、彩度Sとし、前記色特徴値54のカラー値を明度Lo、色相Ho、彩度Soとし、係数をα、β及びγとしたとき、次式(2)
【数2】
で簡易色差を算出することを特徴とする請求項1記載の歯当たり面検出装置。
【請求項4】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、
前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換部と、
前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正処理部と、
明度補正された前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部と、
を備えたことを特徴とする歯当たり面検出装置。
【請求項5】
前記カメラが、撮像のゲインを調整するゲイン調整部を備え、
前記明度補正処理部が、前記カラー画像の明度が予め定められた前記明度範囲外の際には、前記ゲインの調整を制御するゲイン調整処理を備えた、
ことを特徴とする請求項4記載の歯当たり面検出装置。
【請求項6】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、
前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換部と、
前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正処理部と、
明度補正された前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備え、
この歯当たり面検出部が、
前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定処理と、
前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成処理と、
前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別処理と、を備えた、
ことを特徴とする歯当たり面検出装置。
【請求項7】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成する撮像工程と、
前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換工程と、
前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正工程と、
明度補正された前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定工程と、
前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成工程と、
前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別工程と、
を備えたことを特徴とする歯当たり面検出方法。
【請求項8】
請求項7記載の方法をCPUを用いて実行するための歯当たり面検出用プログラム。
【請求項1】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、
前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備え、
この歯当たり面検出部が、
前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定処理と、
前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成処理と、
前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別処理と、を備えた、
ことを特徴とする歯当たり面検出装置。
【請求項2】
前記色差データ生成処理が、前記カラー画像の各カラー値を明度L、色相H、彩度S、前記色特徴値のカラー値を明度Lo、色相Ho、彩度Soとしたとき、次式(1)
【数1】
で前記色差を算出することを特徴とする請求項1記載の歯当たり面検出装置。
【請求項3】
前記色差データ生成処理が、前記カラー画像の各カラー値を明度L、色相H、彩度Sとし、前記色特徴値54のカラー値を明度Lo、色相Ho、彩度Soとし、係数をα、β及びγとしたとき、次式(2)
【数2】
で簡易色差を算出することを特徴とする請求項1記載の歯当たり面検出装置。
【請求項4】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、
前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換部と、
前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正処理部と、
明度補正された前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部と、
を備えたことを特徴とする歯当たり面検出装置。
【請求項5】
前記カメラが、撮像のゲインを調整するゲイン調整部を備え、
前記明度補正処理部が、前記カラー画像の明度が予め定められた前記明度範囲外の際には、前記ゲインの調整を制御するゲイン調整処理を備えた、
ことを特徴とする請求項4記載の歯当たり面検出装置。
【請求項6】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成するカメラと、
前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換部と、
前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正処理部と、
明度補正された前記カラー画像に基づいて前記歯面での歯当たり面を検出する歯当たり面検出部とを備え、
この歯当たり面検出部が、
前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定処理と、
前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成処理と、
前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別処理と、を備えた、
ことを特徴とする歯当たり面検出装置。
【請求項7】
塗料が塗布された歯面をカラーで撮像してカラー画像を生成する撮像工程と、
前記カラー画像の色空間を変換して当該カラー画像の明度を算出するカラー座標変換工程と、
前記カラー画像の前記明度を予め定められた明度範囲内に向けて前記歯面の前記明度又は輝度を補正する明度補正工程と、
明度補正された前記カラー画像から前記歯面の色の特徴値となる色特徴値を特定する色特徴値特定工程と、
前記歯面の各カラー値について前記色特徴値との色差を算出することで色差データを生成する色差データ生成工程と、
前記色差データのヒストグラムからしきい値を算出すると共に当該色差データを二値化することで前記歯当たり面を識別する歯当たり面識別工程と、
を備えたことを特徴とする歯当たり面検出方法。
【請求項8】
請求項7記載の方法をCPUを用いて実行するための歯当たり面検出用プログラム。
【図1】

【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図14】
【図15】
【図17】
【図18】
【図3】
【図10】
【図13】
【図16】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図14】
【図15】
【図17】
【図18】
【図3】
【図10】
【図13】
【図16】
【公開番号】特開2011−75506(P2011−75506A)
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願番号】特願2009−229737(P2009−229737)
【出願日】平成21年10月1日(2009.10.1)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願日】平成21年10月1日(2009.10.1)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]