
歯数可変円錐歯車式無段変速装置
【課題】動力可変伝達装置においては、動力伝達ロスが少なく入出力比を無段階に加減速制御でき、しかも構造が簡単で製造コストのかからない装置が望まれていた。その為には、円錐型の可変速動力伝達装置を摩擦伝動方式から、確実な動力伝達手段である歯車伝動方式に変革することが必要だが、整数とならない場合の歯数余り相当分を吸収する方法と、噛み合う相手の歯車との変速時の連続移動をスムースに行うことが課題である。
【解決手段】このための対策として、円錐形表面にV字型の連続歯溝を持つ円錐型歯数可変歯車の歯形パターン構造と、歯数余りを丸め込む歯先円縮小式歯数可変円錐歯車構造により解決する方法を発明。更にその活用事例として本発明の歯車を組み合わせ、動力伝達ロスが少なく構造が簡単で製造容易な無段変速歯車装置への応用を実現した。
【解決手段】このための対策として、円錐形表面にV字型の連続歯溝を持つ円錐型歯数可変歯車の歯形パターン構造と、歯数余りを丸め込む歯先円縮小式歯数可変円錐歯車構造により解決する方法を発明。更にその活用事例として本発明の歯車を組み合わせ、動力伝達ロスが少なく構造が簡単で製造容易な無段変速歯車装置への応用を実現した。
【発明の詳細な説明】
【技術分野】
【0001】
従来の無段変速装置にはローラ圧着や流体オイル伝達、CVT(Continuously Variable Transmission)方式、ハーフトロイダルCVT等の摩擦伝動方式等があるが、本発明は、コストが安く動力伝達が確実な歯車伝動方式への変革を実現するための方式に関するものである。
【背景技術】
【0002】
歯車伝動方式で無段変速装置に関する従来技術では、既に歯数可変円錐歯車による無段変速機構があり、歯数を変化させて確実に動力伝達する手段が特許公開されている(特許文献1参照)。
【0003】
【特許文献1】特許第4186196号 歯数可変歯車式無段変速装置
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記特許文献1上で述べられている通り、円錐・円盤の径サイズ変化は連続的なので、この特性を活かし、整数とならない歯数余りを吸収し且つ、噛み合う相手の歯車の移動をスムースにして変速を容易に制御することにより、簡単で確実な歯車伝動式変速装置を実現している。しかし噛み合う伝達歯車が、変速動作時に丁度、歯数余りが最大となる部分を通過する時、負荷変化のタイミングによっては噛み合わせ補整調整幅が不足して摩擦音が発生する場合があった。
【課題を解決するための手段】
【0005】
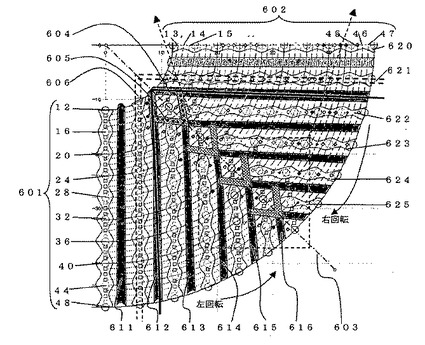
基本は特許文献1と同じであるが、先ず歯車の円ピッチ幅を一定にし、4分割の例では円錐を全円周(360度)で均等に4分割(90度)し、その各4分割範囲内の中間位置を折り返し線としてその各4分割範囲内で両側の分割開始線から同じピッチ幅間隔で中間折り返し線まで歯溝を切れば、その中間折り返し線上で交わる点(歯溝位置)は連続歯溝の折り返し曲がり点として円錐の径の大きくなる方向に広がるV字型連続歯溝パターン(図6−604の太い実線上の歯溝を基本形とする図6−611〜616の歯溝列)を形成する。
【0006】
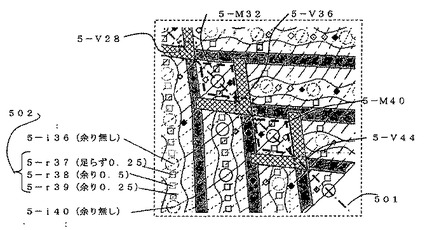
次に前記V字型歯溝と逆方向に数段の歯溝迄達する複数の逆V字型連続歯溝パターン(図6−605の太い点線を基本形とする歯溝列)の連続歯溝を形成し、この時前記V字型と逆V字型の連続歯溝によって前記中間位置の折り返し線上では共に菱形で中央で歯数が整数となる歯先(歯の山:図5 5−M32、5−M40、他)と歯溝(図5 5−V28、5−V36、5−V44、他)が交互に作られ、この整数の歯先と整数の歯溝との間には歯数余りが最大±0.5ピッチ(図5 5―r38)の歯先が形成される。
【0007】
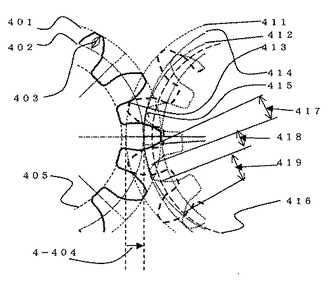
そして、この整数の歯先と整数の歯溝との範囲において、歯先円の円周がピッチ円の円周になるように歯先の位置を中心軸側に下げて(図4−404)歯先の面を形成(V字型連続歯先:図6 606を1/4全景の基本として平衡2点線で表した部分の各620〜625の歯先で低くなる部分を絞った2本のなみ線で表示)することにより、噛み合い時の歯溝の広がり(最大約0.75ピッチ:図4−419)と歯先の狭まり(最大約0.25ピッチ:図4−418)によるバックラッシ効果(図4−417)により歯数余り調整が容易となった。
【発明の効果】
【0008】
このV字型連続歯溝により円錐の径変化に対応して整数歯数(後述例では基準歯数10段相当)間の変速機構が無段階となり連続変速動作がスムースとなる。また変速途中の歯数余りも歯先円縮小方式によるバックラッシで吸収され且つ、円周のサイズも比例して変化するため歯車機構による大きな伝達力の可変速制御装置が可能となる。
【0009】
更に構造が簡単で部品点数も格段に少なく(図1、図2の例では従来の37段37枚の歯車相当が1ケに)製造コストや長期運転時の維持コスト等も減り、総合的な製品の生涯エネルギーコストで見ても省資源・省エネ型で環境にも配慮した動力可変伝達歯車となる。
【発明を実施するための最良の形態】
【0010】
図1、2は本発明の請求項1の実施例に係る円錐型歯車のV字型連続歯溝の完成図であり、図3、図5、図6はその原理構造説明図である。このため構成要素等の出現順は逆に図6、5、3となる。なおこれら図中では同じ構成要素に対しては同じ参照番号を用いる場合がある。
【実施例1】
【0011】
請求項1のV字型連続歯溝の完成図は図1、図2であるが図2−203を拡大した図6から説明する。先ず円ピッチ幅を固定にして最大:最小の整歯数比を4:1、歯数を12〜48(この間で無段歯車となるがシミュレーション上、37段モデルの歯型位置想定:図6−601、602)の範囲で4分割して90度毎でも整数となる基準歯数(10段相当:12、16、20、24、28、32、36、40、44、48)と位置(図6−601)を設定する。また中間の45度毎の分割折り返し線上(図6−603)でも整数となる歯数値12、20、28、36、44は先に述べたV字型連続歯溝構造の基点でもあり、図6−604太線上の歯溝を全体の基本形とする図6−611〜616の歯溝列。そして中間の45度毎の分割折り返し線上(図6−603)でも整数となる歯数値16、24、32、40、48はV字型連続歯先(図6−606)の基点であり、並行太点線上のV字連続歯先を基本形とする図6−620〜625歯先列(2本のなみ線の絞って狭いところは歯数余り径位置で歯先がピッチ円の円周になるように歯先の位置を中心軸側に引き込んで低くした部分として表示)を形成する。
【0012】
更に中間27段の歯車の位相も上記と同じく90度毎を開始点として、左右45度に歯数余りを加えた歯形位置をシミュレーションした右下(1/4)の噛み合わせ図と、V字型連続歯溝(基本形の図6−604を展開した図6−611〜616)を重ね図示したものである。全体はこの4倍(図2)となるが原理は同じである。
【0013】
図3は、図2の円錐型歯数可変歯車の歯形パターンの同じく右下破線(図2−203)で示す部分を切り出したV字型連続歯形図と基準10種の歯車の位置を重ね合わせマッピングした図であり、図6の通り、鉛直に近いV字型連続歯形構造により歯数可変切り替え動作を無段階にして移動をスムースにしている。図4は、歯数余り調整を実現するため歯先円をピッチ円位置に下げた場合のバックラッシ効果説明図である。
【0014】
請求項1の歯先円縮小式歯数可変円錐歯車構造について図5で例を説明すると、4分割折り返し線(図5−501)上で整数とならない歯数例(図5 5−r37、r38、r39:右回り時の歯先位置は小さいひし形、左周り時の歯先位置は小さい四角形位置)が、同、4分割折り返し線を越えると歯数余りとなり、連続して捉えた逆V字連続歯形位置パターン(図6−605の太い点線上の歯溝が全体の基本形で前説V字型連続歯溝と同じ基点)となる。
【0015】
これらの歯数余り値を算出すれば、(図6−603の分割折り返し線上で整数となっている直近の歯数値−被余り算定歯数値)÷分割数より、(40−39)÷4=0.25(図5−r39)から(40−38)÷4=0.5(図5−r38)ピッチ以下と小さくなるため歯数余りの丸め込み吸収も容易で、この歯数余りとなる径の範囲において、歯先円の円周がピッチ円(噛み合い径)の円周になるように通常の歯先の位置(図4−413)を中心軸側に小さく(図4−415)して歯末の面を形成することにより、噛み合い時の歯溝の広がり(最大約0.75ピッチ:図4−419)と歯先の狭まり(最大約0.25ピッチ:図4−418)よるバックラッシ効果(図4−417)により歯数余りが補整され噛み合いが持続して歯車方式による確実なトルク伝達が無段階に行えることとなる。
【0016】
また、歯数37になると余りが(40−37)÷4=0.75ピッチ(図5 5−r37)であるが、逆に0.25の足らずでもあり、0.5(図5−r38)ピッチ以下と小さいため歯数余りの丸め込み吸収が容易であり歯数可変歯車が実現されることとなる。
【0017】
また上記の歯数余り条件下でもこの円錐型歯数可変歯車の連続歯形パターン(図3)の通り、噛み合う相手の歯の角度θ(図3−301)が、円中心からの鉛直線上にある4分割折り返しコーナ(図3−306)でV字型連続歯形が反転している。このため歯数余りでの回転のゆらぎも1/4周(90度)内で相殺されるため速度変化が生じない構造となっている。
【実施例2】
【0018】
請求項2の伝達歯車について説明する前に、噛み合う相手の請求項1の連続歯溝の幅(図3−302)について詳述すると、歯溝の位置(図3−303)が中心軸の鉛直に対し(θ度:図3−301)傾いているため歯溝幅(図3−302)=噛み合う相手歯車の円ピッチ(図3−305)×cosθ+相手歯車の歯幅(図3−304)×sinθ。と各開始点(図2 201−a、b、c、d)から遠ざかるほど歯溝幅が広く必要となる。
【0019】
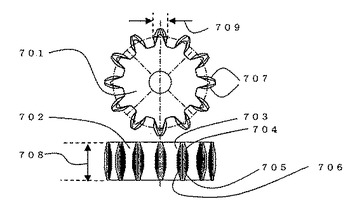
そこで請求項2では、請求項1の円錐歯車側の‘繰り返し反転やまば歯車構造’に最適に噛み合う伝達歯車として、歯先4辺の角を取る形に歯幅両端でインボリュート歯末曲線の両角を軸に対して傾斜させた‘やまば歯車形状’に形成することにより噛み合う部分が段々にずれる効果も加わって、より歯車間の回転運動の伝達を滑らかになり動力伝達特性も向上し噛み合い接触面が増え相手歯車の移動もよりスムースにするのに適した「両端逆やまば(図7−703、704、705、706)型伝達歯車(図7−701、702)」構造を形成している。
【実施例3】
【0020】
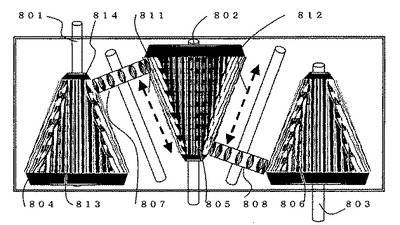
図8は請求項4のスーパメカニカルトルクコンバータの実施例であるが請求項3も含め説明すれば、これを実現するために、請求項1の円錐歯車を回転軸(図8−801、802、803)に沿って3ケ、互いに径の大きさが反対になるように並べ(図8−804、805,806)、その間に径の変化する歯先に対し互いに常に噛み合い移動可能な本請求項2の両端逆やまば型伝達歯車を変速兼伝達用の歯車(図8−807,808)として配す。
【0021】
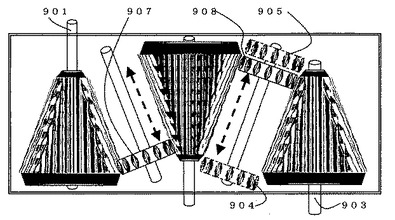
そしてこの変速兼伝達用歯車の位置を外部より自動又は、手動で移動(図8矢印:811,812)させることにより3ケの円錐歯車(入力軸対出力軸)の回転比を連続的に可変制御できる機能を有する円錐歯車式無段変速型並行軸動力伝達装置を構成する。図8の例では(1/4)×(1/4)=1/16の減速で16倍のトルク制御が行なえ、図9の例では4×4=16倍の増速で1/16のトルク制御をそれぞれ簡単な構造で連続的且つ高速に行える。また途中軸での回転トルク取り出しを可能とするスーパトルクコンバータが実現される。
【0022】
ここで、請求項3について説明すれば、請求項1における円錐歯車の軸側の両端の歯底円の径から更に径を減少させて相手伝達歯車の歯先との接触が無くなっていくように絞った円錐形状(図8−813、814)により円錐歯車と伝達歯車間の回転運動の滑らかな遮断(図9−904、又は905)と連結(図9−908他)および、無段変速動作を連続的に行える機能を持った回転運動伝達遮断制御構造となっている。
【0023】
なお前記請求項1の円錐歯車の歯数比1〜4:4〜1の間で37段相当以上の可変速が可能であり、従来、この規模の変速装置では通常111枚(37枚×3ケ)の歯車を入れ替えると複雑な噛み合い制御機構を必要としていたが図7の通り、基本的に5ケで実現している。
【産業上の利用の可能性】
【0024】
本発明の無段変速装置の利用分野として、シンプルな円錐形状で回転トルクを確実に伝達するインボリュートころがり曲線の歯車式無段動力伝達装置が可能となり、よりシンプルで伝達ロスの少ない、廉価、省資源、省エネ型無段変速トルクコンバータが実現され、駆動システムのトルク制御が容易になることにより産業全般の駆動システムに変革をもたらす可能性がある。
具体的には、エンジンとモータをトルク加算するハイブリドシステム等にこの円錐歯車による可変速遊星歯車機構として組み込めば、従来のエンジンとモータのトルク加算に加え、新たに両変速制御も同時に出来る理想的なトルク可変加算型無段変速制御が可能となり低速〜高速走行時の効率的なパワー配分により環境対応車等の性能向上が見込める。
【0025】
更に、揚力型風力発電装置の回転する風車部と発電機との動力伝達部において利用することにより、発電機の回転負荷を軽減して弱風域での不安定な風に対する自然揚力加速を促進させるとともに、トルク不足を補い発電機をより長時間廻し発電効率を向上させることが可能となる。また速度変速制御機能を持たないモータの無段変速機や、原動機の回転出力を無段階に可変速制御する内燃機関用変速機として用いれば初期駆動時のトルク増強や、負荷の変動に対して高率良く駆動させることができる。
【図面の簡単な説明】
【0026】
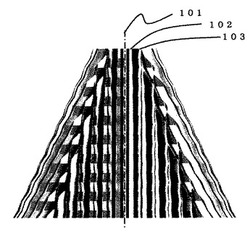
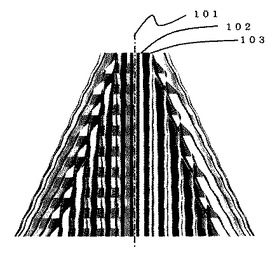
【図1】円錐歯車を側面から見たの3D−CAD図面である。
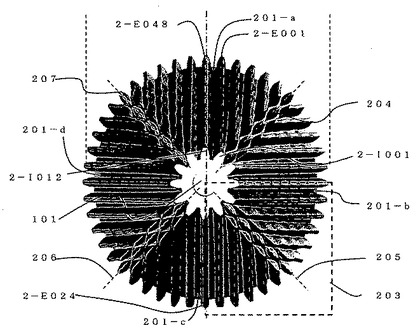
【図2】円錐歯車を上面から見た円錐型歯数可変歯車の歯形パターン3D−CAD図面である。
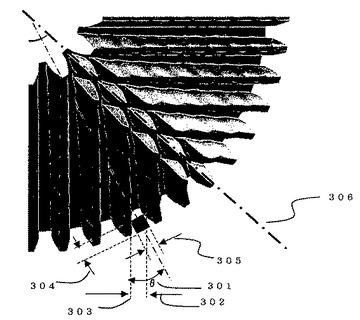
【図3】図2の円錐型歯車右下破線相当部分に重ね合わせた噛み合い歯車角度説明図である。
【図4】歯数余りを想定し歯先円をピッチ円位置まで下げた場合のバックラッシ基本説明図である。
【図5】歯数余り調整用折り返し点部分拡大説明図である。
【図6】V字型連続歯溝とV字型連続歯先構造図(同じ円ピッチ幅で歯数12から48の想定歯形位置をコンピュータシュミレーションで算出した右下1/4を図示)である。
【図7】両端逆やまば形伝達歯車である。
【図8】円錐歯車式メカニカル無段変速型動力伝達装置構成図(16倍の最大トルク)である。
【図9】円錐歯車式メカニカル無段変速型動力伝達装置構成図(16倍の最高速出力)である。
【符号の説明】
【0027】
101 円錐型歯車の回転軸中心
102 円錐型歯車の連続歯溝の谷
103 円錐型歯車の連続歯先の山
201−a、b、c、d 円錐型歯車の4分割内連続歯溝の開始位置
203 図3に対応した切り出し範囲
204〜207 4分割折り返し線(歯数余りを丸め込むラウンド歯溝位置)
2−E001〜E048 外径歯数番号1〜48に対応
2−I001〜I012 内径歯数番号1〜12に対応
301 円錐型歯車の連続歯溝と噛み合う相手伝達歯車の傾き角度θ
302 連続歯溝の幅
303 連続歯溝の切り込み線
304 連続歯溝と噛み合う伝達歯車の歯幅(軸方向に測った歯の長さ)
305 連続歯溝と噛み合う伝達歯車の歯溝の幅(=歯厚)
306 円錐型歯車の4分割折り返し線
401 歯先円
402 ピッチ円(噛み合い径)
403 歯末のたけ(歯先)
404 歯先円位置をピッチ円位置に引き込んだ例
405 歯底円
411 相手側歯先円(通常位置)
412 ピッチ円(通常噛み合い位置)
413 歯先(通常位置)
414 噛み合い位置まで後退させた時の相手歯先円
415 歯先円を縮小した場合の歯先の想定位置
416 歯先円を縮小した場合の想定噛み合い中心円
417 歯先をピッチ円まで退後させた時のバックラッシ幅
418 歯先をピッチ円まで退後させた時の歯先の狭まり(約0.25ピッチ)
419 歯先をピッチ円まで退後させた時の噛み合い時の歯溝の広がり(約0.75ピッチ)
501 4分割折り返し線
502 歯数余り(足らず)想定歯形軌跡円弧(5−r37、5−r38、5−r39)
5−V28、5−V36、5−V44 V字歯溝が重なった菱形の歯の溝
5−M32、5−M40 V字歯先が重なり菱形の歯先となった歯の山
601 基準整歯数10種の歯車噛み合い位置(○表示:歯数12、16、20、24、28、32、36、40、44、48と10段相当)
602 歯数余り27種の噛み合い位置(◇:右回転時表示、□:左回転時表示、歯数13、14、15、 17、18、19、 21、22、23、 25、26、27、 29、30、31、 33、34、35、 37、38、39、 41、42、43、45、46、47と27段相当)
603 連続歯溝連結折り返し線
604 V字連結歯溝基本パターン(標準5種の歯溝位置の基本形)
605 逆V字連結歯溝基本パターン
606 V字連結歯先基本パターン(標準5種の歯先位置の基本形)
611〜616 V字型連続歯溝
620〜625 V字型連続歯先(整歯数数部は広く、歯数余り部は狭く2本のなみ線で表示)
701 やまば形伝達歯車の正面図
702 やまば形伝達歯車の側面図
703,704,705,706 両端逆やまば歯形外観図
707 やまば形伝達歯車の歯末の面
708 やまば形伝達歯車の歯幅
709 やまば形伝達歯車の歯厚
801 入力側円錐歯車回転軸
802 中間段円錐歯車回転軸
803 出力側円錐歯車回転軸
804 入力段円錐歯車
805 中間段円錐歯車
806 出力段円錐歯車
807、808 可動式速度制御兼伝達歯車(最大減速比1/16倍、最大トルク16倍位置)
813,814 両端円推面滑り連結構造図
901 入力側円錐歯車回転軸
903 出力側円錐歯車回転軸
904、905 可動式駆動トルク伝達歯車の伝達遮断位置(点線表示)
907、908 可動式速度制御兼伝達歯車(最大変速比16倍、最大トルク1/16倍位置)
【技術分野】
【0001】
従来の無段変速装置にはローラ圧着や流体オイル伝達、CVT(Continuously Variable Transmission)方式、ハーフトロイダルCVT等の摩擦伝動方式等があるが、本発明は、コストが安く動力伝達が確実な歯車伝動方式への変革を実現するための方式に関するものである。
【背景技術】
【0002】
歯車伝動方式で無段変速装置に関する従来技術では、既に歯数可変円錐歯車による無段変速機構があり、歯数を変化させて確実に動力伝達する手段が特許公開されている(特許文献1参照)。
【0003】
【特許文献1】特許第4186196号 歯数可変歯車式無段変速装置
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記特許文献1上で述べられている通り、円錐・円盤の径サイズ変化は連続的なので、この特性を活かし、整数とならない歯数余りを吸収し且つ、噛み合う相手の歯車の移動をスムースにして変速を容易に制御することにより、簡単で確実な歯車伝動式変速装置を実現している。しかし噛み合う伝達歯車が、変速動作時に丁度、歯数余りが最大となる部分を通過する時、負荷変化のタイミングによっては噛み合わせ補整調整幅が不足して摩擦音が発生する場合があった。
【課題を解決するための手段】
【0005】
基本は特許文献1と同じであるが、先ず歯車の円ピッチ幅を一定にし、4分割の例では円錐を全円周(360度)で均等に4分割(90度)し、その各4分割範囲内の中間位置を折り返し線としてその各4分割範囲内で両側の分割開始線から同じピッチ幅間隔で中間折り返し線まで歯溝を切れば、その中間折り返し線上で交わる点(歯溝位置)は連続歯溝の折り返し曲がり点として円錐の径の大きくなる方向に広がるV字型連続歯溝パターン(図6−604の太い実線上の歯溝を基本形とする図6−611〜616の歯溝列)を形成する。
【0006】
次に前記V字型歯溝と逆方向に数段の歯溝迄達する複数の逆V字型連続歯溝パターン(図6−605の太い点線を基本形とする歯溝列)の連続歯溝を形成し、この時前記V字型と逆V字型の連続歯溝によって前記中間位置の折り返し線上では共に菱形で中央で歯数が整数となる歯先(歯の山:図5 5−M32、5−M40、他)と歯溝(図5 5−V28、5−V36、5−V44、他)が交互に作られ、この整数の歯先と整数の歯溝との間には歯数余りが最大±0.5ピッチ(図5 5―r38)の歯先が形成される。
【0007】
そして、この整数の歯先と整数の歯溝との範囲において、歯先円の円周がピッチ円の円周になるように歯先の位置を中心軸側に下げて(図4−404)歯先の面を形成(V字型連続歯先:図6 606を1/4全景の基本として平衡2点線で表した部分の各620〜625の歯先で低くなる部分を絞った2本のなみ線で表示)することにより、噛み合い時の歯溝の広がり(最大約0.75ピッチ:図4−419)と歯先の狭まり(最大約0.25ピッチ:図4−418)によるバックラッシ効果(図4−417)により歯数余り調整が容易となった。
【発明の効果】
【0008】
このV字型連続歯溝により円錐の径変化に対応して整数歯数(後述例では基準歯数10段相当)間の変速機構が無段階となり連続変速動作がスムースとなる。また変速途中の歯数余りも歯先円縮小方式によるバックラッシで吸収され且つ、円周のサイズも比例して変化するため歯車機構による大きな伝達力の可変速制御装置が可能となる。
【0009】
更に構造が簡単で部品点数も格段に少なく(図1、図2の例では従来の37段37枚の歯車相当が1ケに)製造コストや長期運転時の維持コスト等も減り、総合的な製品の生涯エネルギーコストで見ても省資源・省エネ型で環境にも配慮した動力可変伝達歯車となる。
【発明を実施するための最良の形態】
【0010】
図1、2は本発明の請求項1の実施例に係る円錐型歯車のV字型連続歯溝の完成図であり、図3、図5、図6はその原理構造説明図である。このため構成要素等の出現順は逆に図6、5、3となる。なおこれら図中では同じ構成要素に対しては同じ参照番号を用いる場合がある。
【実施例1】
【0011】
請求項1のV字型連続歯溝の完成図は図1、図2であるが図2−203を拡大した図6から説明する。先ず円ピッチ幅を固定にして最大:最小の整歯数比を4:1、歯数を12〜48(この間で無段歯車となるがシミュレーション上、37段モデルの歯型位置想定:図6−601、602)の範囲で4分割して90度毎でも整数となる基準歯数(10段相当:12、16、20、24、28、32、36、40、44、48)と位置(図6−601)を設定する。また中間の45度毎の分割折り返し線上(図6−603)でも整数となる歯数値12、20、28、36、44は先に述べたV字型連続歯溝構造の基点でもあり、図6−604太線上の歯溝を全体の基本形とする図6−611〜616の歯溝列。そして中間の45度毎の分割折り返し線上(図6−603)でも整数となる歯数値16、24、32、40、48はV字型連続歯先(図6−606)の基点であり、並行太点線上のV字連続歯先を基本形とする図6−620〜625歯先列(2本のなみ線の絞って狭いところは歯数余り径位置で歯先がピッチ円の円周になるように歯先の位置を中心軸側に引き込んで低くした部分として表示)を形成する。
【0012】
更に中間27段の歯車の位相も上記と同じく90度毎を開始点として、左右45度に歯数余りを加えた歯形位置をシミュレーションした右下(1/4)の噛み合わせ図と、V字型連続歯溝(基本形の図6−604を展開した図6−611〜616)を重ね図示したものである。全体はこの4倍(図2)となるが原理は同じである。
【0013】
図3は、図2の円錐型歯数可変歯車の歯形パターンの同じく右下破線(図2−203)で示す部分を切り出したV字型連続歯形図と基準10種の歯車の位置を重ね合わせマッピングした図であり、図6の通り、鉛直に近いV字型連続歯形構造により歯数可変切り替え動作を無段階にして移動をスムースにしている。図4は、歯数余り調整を実現するため歯先円をピッチ円位置に下げた場合のバックラッシ効果説明図である。
【0014】
請求項1の歯先円縮小式歯数可変円錐歯車構造について図5で例を説明すると、4分割折り返し線(図5−501)上で整数とならない歯数例(図5 5−r37、r38、r39:右回り時の歯先位置は小さいひし形、左周り時の歯先位置は小さい四角形位置)が、同、4分割折り返し線を越えると歯数余りとなり、連続して捉えた逆V字連続歯形位置パターン(図6−605の太い点線上の歯溝が全体の基本形で前説V字型連続歯溝と同じ基点)となる。
【0015】
これらの歯数余り値を算出すれば、(図6−603の分割折り返し線上で整数となっている直近の歯数値−被余り算定歯数値)÷分割数より、(40−39)÷4=0.25(図5−r39)から(40−38)÷4=0.5(図5−r38)ピッチ以下と小さくなるため歯数余りの丸め込み吸収も容易で、この歯数余りとなる径の範囲において、歯先円の円周がピッチ円(噛み合い径)の円周になるように通常の歯先の位置(図4−413)を中心軸側に小さく(図4−415)して歯末の面を形成することにより、噛み合い時の歯溝の広がり(最大約0.75ピッチ:図4−419)と歯先の狭まり(最大約0.25ピッチ:図4−418)よるバックラッシ効果(図4−417)により歯数余りが補整され噛み合いが持続して歯車方式による確実なトルク伝達が無段階に行えることとなる。
【0016】
また、歯数37になると余りが(40−37)÷4=0.75ピッチ(図5 5−r37)であるが、逆に0.25の足らずでもあり、0.5(図5−r38)ピッチ以下と小さいため歯数余りの丸め込み吸収が容易であり歯数可変歯車が実現されることとなる。
【0017】
また上記の歯数余り条件下でもこの円錐型歯数可変歯車の連続歯形パターン(図3)の通り、噛み合う相手の歯の角度θ(図3−301)が、円中心からの鉛直線上にある4分割折り返しコーナ(図3−306)でV字型連続歯形が反転している。このため歯数余りでの回転のゆらぎも1/4周(90度)内で相殺されるため速度変化が生じない構造となっている。
【実施例2】
【0018】
請求項2の伝達歯車について説明する前に、噛み合う相手の請求項1の連続歯溝の幅(図3−302)について詳述すると、歯溝の位置(図3−303)が中心軸の鉛直に対し(θ度:図3−301)傾いているため歯溝幅(図3−302)=噛み合う相手歯車の円ピッチ(図3−305)×cosθ+相手歯車の歯幅(図3−304)×sinθ。と各開始点(図2 201−a、b、c、d)から遠ざかるほど歯溝幅が広く必要となる。
【0019】
そこで請求項2では、請求項1の円錐歯車側の‘繰り返し反転やまば歯車構造’に最適に噛み合う伝達歯車として、歯先4辺の角を取る形に歯幅両端でインボリュート歯末曲線の両角を軸に対して傾斜させた‘やまば歯車形状’に形成することにより噛み合う部分が段々にずれる効果も加わって、より歯車間の回転運動の伝達を滑らかになり動力伝達特性も向上し噛み合い接触面が増え相手歯車の移動もよりスムースにするのに適した「両端逆やまば(図7−703、704、705、706)型伝達歯車(図7−701、702)」構造を形成している。
【実施例3】
【0020】
図8は請求項4のスーパメカニカルトルクコンバータの実施例であるが請求項3も含め説明すれば、これを実現するために、請求項1の円錐歯車を回転軸(図8−801、802、803)に沿って3ケ、互いに径の大きさが反対になるように並べ(図8−804、805,806)、その間に径の変化する歯先に対し互いに常に噛み合い移動可能な本請求項2の両端逆やまば型伝達歯車を変速兼伝達用の歯車(図8−807,808)として配す。
【0021】
そしてこの変速兼伝達用歯車の位置を外部より自動又は、手動で移動(図8矢印:811,812)させることにより3ケの円錐歯車(入力軸対出力軸)の回転比を連続的に可変制御できる機能を有する円錐歯車式無段変速型並行軸動力伝達装置を構成する。図8の例では(1/4)×(1/4)=1/16の減速で16倍のトルク制御が行なえ、図9の例では4×4=16倍の増速で1/16のトルク制御をそれぞれ簡単な構造で連続的且つ高速に行える。また途中軸での回転トルク取り出しを可能とするスーパトルクコンバータが実現される。
【0022】
ここで、請求項3について説明すれば、請求項1における円錐歯車の軸側の両端の歯底円の径から更に径を減少させて相手伝達歯車の歯先との接触が無くなっていくように絞った円錐形状(図8−813、814)により円錐歯車と伝達歯車間の回転運動の滑らかな遮断(図9−904、又は905)と連結(図9−908他)および、無段変速動作を連続的に行える機能を持った回転運動伝達遮断制御構造となっている。
【0023】
なお前記請求項1の円錐歯車の歯数比1〜4:4〜1の間で37段相当以上の可変速が可能であり、従来、この規模の変速装置では通常111枚(37枚×3ケ)の歯車を入れ替えると複雑な噛み合い制御機構を必要としていたが図7の通り、基本的に5ケで実現している。
【産業上の利用の可能性】
【0024】
本発明の無段変速装置の利用分野として、シンプルな円錐形状で回転トルクを確実に伝達するインボリュートころがり曲線の歯車式無段動力伝達装置が可能となり、よりシンプルで伝達ロスの少ない、廉価、省資源、省エネ型無段変速トルクコンバータが実現され、駆動システムのトルク制御が容易になることにより産業全般の駆動システムに変革をもたらす可能性がある。
具体的には、エンジンとモータをトルク加算するハイブリドシステム等にこの円錐歯車による可変速遊星歯車機構として組み込めば、従来のエンジンとモータのトルク加算に加え、新たに両変速制御も同時に出来る理想的なトルク可変加算型無段変速制御が可能となり低速〜高速走行時の効率的なパワー配分により環境対応車等の性能向上が見込める。
【0025】
更に、揚力型風力発電装置の回転する風車部と発電機との動力伝達部において利用することにより、発電機の回転負荷を軽減して弱風域での不安定な風に対する自然揚力加速を促進させるとともに、トルク不足を補い発電機をより長時間廻し発電効率を向上させることが可能となる。また速度変速制御機能を持たないモータの無段変速機や、原動機の回転出力を無段階に可変速制御する内燃機関用変速機として用いれば初期駆動時のトルク増強や、負荷の変動に対して高率良く駆動させることができる。
【図面の簡単な説明】
【0026】
【図1】円錐歯車を側面から見たの3D−CAD図面である。
【図2】円錐歯車を上面から見た円錐型歯数可変歯車の歯形パターン3D−CAD図面である。
【図3】図2の円錐型歯車右下破線相当部分に重ね合わせた噛み合い歯車角度説明図である。
【図4】歯数余りを想定し歯先円をピッチ円位置まで下げた場合のバックラッシ基本説明図である。
【図5】歯数余り調整用折り返し点部分拡大説明図である。
【図6】V字型連続歯溝とV字型連続歯先構造図(同じ円ピッチ幅で歯数12から48の想定歯形位置をコンピュータシュミレーションで算出した右下1/4を図示)である。
【図7】両端逆やまば形伝達歯車である。
【図8】円錐歯車式メカニカル無段変速型動力伝達装置構成図(16倍の最大トルク)である。
【図9】円錐歯車式メカニカル無段変速型動力伝達装置構成図(16倍の最高速出力)である。
【符号の説明】
【0027】
101 円錐型歯車の回転軸中心
102 円錐型歯車の連続歯溝の谷
103 円錐型歯車の連続歯先の山
201−a、b、c、d 円錐型歯車の4分割内連続歯溝の開始位置
203 図3に対応した切り出し範囲
204〜207 4分割折り返し線(歯数余りを丸め込むラウンド歯溝位置)
2−E001〜E048 外径歯数番号1〜48に対応
2−I001〜I012 内径歯数番号1〜12に対応
301 円錐型歯車の連続歯溝と噛み合う相手伝達歯車の傾き角度θ
302 連続歯溝の幅
303 連続歯溝の切り込み線
304 連続歯溝と噛み合う伝達歯車の歯幅(軸方向に測った歯の長さ)
305 連続歯溝と噛み合う伝達歯車の歯溝の幅(=歯厚)
306 円錐型歯車の4分割折り返し線
401 歯先円
402 ピッチ円(噛み合い径)
403 歯末のたけ(歯先)
404 歯先円位置をピッチ円位置に引き込んだ例
405 歯底円
411 相手側歯先円(通常位置)
412 ピッチ円(通常噛み合い位置)
413 歯先(通常位置)
414 噛み合い位置まで後退させた時の相手歯先円
415 歯先円を縮小した場合の歯先の想定位置
416 歯先円を縮小した場合の想定噛み合い中心円
417 歯先をピッチ円まで退後させた時のバックラッシ幅
418 歯先をピッチ円まで退後させた時の歯先の狭まり(約0.25ピッチ)
419 歯先をピッチ円まで退後させた時の噛み合い時の歯溝の広がり(約0.75ピッチ)
501 4分割折り返し線
502 歯数余り(足らず)想定歯形軌跡円弧(5−r37、5−r38、5−r39)
5−V28、5−V36、5−V44 V字歯溝が重なった菱形の歯の溝
5−M32、5−M40 V字歯先が重なり菱形の歯先となった歯の山
601 基準整歯数10種の歯車噛み合い位置(○表示:歯数12、16、20、24、28、32、36、40、44、48と10段相当)
602 歯数余り27種の噛み合い位置(◇:右回転時表示、□:左回転時表示、歯数13、14、15、 17、18、19、 21、22、23、 25、26、27、 29、30、31、 33、34、35、 37、38、39、 41、42、43、45、46、47と27段相当)
603 連続歯溝連結折り返し線
604 V字連結歯溝基本パターン(標準5種の歯溝位置の基本形)
605 逆V字連結歯溝基本パターン
606 V字連結歯先基本パターン(標準5種の歯先位置の基本形)
611〜616 V字型連続歯溝
620〜625 V字型連続歯先(整歯数数部は広く、歯数余り部は狭く2本のなみ線で表示)
701 やまば形伝達歯車の正面図
702 やまば形伝達歯車の側面図
703,704,705,706 両端逆やまば歯形外観図
707 やまば形伝達歯車の歯末の面
708 やまば形伝達歯車の歯幅
709 やまば形伝達歯車の歯厚
801 入力側円錐歯車回転軸
802 中間段円錐歯車回転軸
803 出力側円錐歯車回転軸
804 入力段円錐歯車
805 中間段円錐歯車
806 出力段円錐歯車
807、808 可動式速度制御兼伝達歯車(最大減速比1/16倍、最大トルク16倍位置)
813,814 両端円推面滑り連結構造図
901 入力側円錐歯車回転軸
903 出力側円錐歯車回転軸
904、905 可動式駆動トルク伝達歯車の伝達遮断位置(点線表示)
907、908 可動式速度制御兼伝達歯車(最大変速比16倍、最大トルク1/16倍位置)
【特許請求の範囲】
【請求項1】
歯車の基準である円ピッチ幅(歯溝の幅+歯厚)を一定にさせ円錐の径の大きさに比例して連続的に歯数が変わる円錐型歯車において、多分割の一例として4分割の場合、当該円錐歯車の径位置で全円周(360度)を90度で交わる分割開始線により4分割し、その各4分割範囲内の中間位置を折り返し線とし、該各4分割範囲の両側の分割開始線から同一円ピッチ幅(歯溝の幅+歯厚)で前記中間位置の折り返し線まで連続歯溝を切ることによりその中間の折り返し線上で交わる点が連続歯溝の前記折り返し点を構成するように円錐の径の大きくなる方向に広がるV字型の連続歯溝を形成し前記V字型連続歯溝の交わる点から逆方向に円錐の径の小さくなる方向に逆V字型の連続歯溝を形成することにより、前記V字型と逆V字型の連続歯溝によって前記中間位置の折り返し線上では共に菱形で中央で歯数が整数となる歯先と歯溝が交互に作られ、この整数の歯先と整数の歯溝との間で歯数余りが形成される。
そしてこの歯数余りとなる径の区間においては、円錐の径の大きさの変化に従って歯数余りが段々に増加し最大余り(0.5)をピークに減少(一段上の整歯数値から見た余り)を繰り返すが、この最大余りとなる径位置で歯先円の円周がピッチ円(噛み合い径)の円周になるように段々に歯先円を小さくし、更に径が変化して逆に歯数余りが減少していき歯数が整数になった時には歯先の位置が本来の歯先円に戻るように‘歯末のたけ’が段々に変化する構造としたことを特徴とする歯先円可変式円錐型歯数可変歯車。
【請求項2】
請求項1の円錐型歯数可変歯車と一体化して最適に噛み合う伝達歯車において、歯先の歯幅両端の歯厚が薄くなるように、軸の長さ方向に対してそれぞれの4辺の角を逆方向に‘やまば状’に傾斜させた歯先形状としたことを特徴とする歯数可変円錐歯車式無段変速装置用伝達歯車。
【請求項3】
請求項1における円錐歯車の軸側の両端の歯底円の径から更に径を減少させていき相手伝達歯車の歯先との接触が無くなっていくまで円錐の径を絞った円錐形状の滑り面を設けて伝達歯車との噛みあわせが外れる遮断機能を持たせたことを特徴とする円錐型歯数可変歯車用噛みあわせ伝達遮断構造。
【請求項4】
前記請求項1と3とにより構成される円錐型歯数可変歯車機構を複数ケ、回転軸が並行に互いの径の大きさが反対の向きになるように、複数個(本説明例では3個)並べ、この複数の円錐型歯数可変歯車の歯数が変化する歯先に対し互いに噛み合い移動可能な前記請求2の伝達歯車を各円錐型歯数可変歯車の間に配し、この伝達歯車の位置を変化させることにより広範囲なギヤ比(図8の例では16:1、又図9の例では1:16となり1/16倍〜16倍即ち256段変速)の加減速とトルク制御を可能としたことを特徴とする多段メカニカルトルクコンバータ。
【請求項1】
歯車の基準である円ピッチ幅(歯溝の幅+歯厚)を一定にさせ円錐の径の大きさに比例して連続的に歯数が変わる円錐型歯車において、多分割の一例として4分割の場合、当該円錐歯車の径位置で全円周(360度)を90度で交わる分割開始線により4分割し、その各4分割範囲内の中間位置を折り返し線とし、該各4分割範囲の両側の分割開始線から同一円ピッチ幅(歯溝の幅+歯厚)で前記中間位置の折り返し線まで連続歯溝を切ることによりその中間の折り返し線上で交わる点が連続歯溝の前記折り返し点を構成するように円錐の径の大きくなる方向に広がるV字型の連続歯溝を形成し前記V字型連続歯溝の交わる点から逆方向に円錐の径の小さくなる方向に逆V字型の連続歯溝を形成することにより、前記V字型と逆V字型の連続歯溝によって前記中間位置の折り返し線上では共に菱形で中央で歯数が整数となる歯先と歯溝が交互に作られ、この整数の歯先と整数の歯溝との間で歯数余りが形成される。
そしてこの歯数余りとなる径の区間においては、円錐の径の大きさの変化に従って歯数余りが段々に増加し最大余り(0.5)をピークに減少(一段上の整歯数値から見た余り)を繰り返すが、この最大余りとなる径位置で歯先円の円周がピッチ円(噛み合い径)の円周になるように段々に歯先円を小さくし、更に径が変化して逆に歯数余りが減少していき歯数が整数になった時には歯先の位置が本来の歯先円に戻るように‘歯末のたけ’が段々に変化する構造としたことを特徴とする歯先円可変式円錐型歯数可変歯車。
【請求項2】
請求項1の円錐型歯数可変歯車と一体化して最適に噛み合う伝達歯車において、歯先の歯幅両端の歯厚が薄くなるように、軸の長さ方向に対してそれぞれの4辺の角を逆方向に‘やまば状’に傾斜させた歯先形状としたことを特徴とする歯数可変円錐歯車式無段変速装置用伝達歯車。
【請求項3】
請求項1における円錐歯車の軸側の両端の歯底円の径から更に径を減少させていき相手伝達歯車の歯先との接触が無くなっていくまで円錐の径を絞った円錐形状の滑り面を設けて伝達歯車との噛みあわせが外れる遮断機能を持たせたことを特徴とする円錐型歯数可変歯車用噛みあわせ伝達遮断構造。
【請求項4】
前記請求項1と3とにより構成される円錐型歯数可変歯車機構を複数ケ、回転軸が並行に互いの径の大きさが反対の向きになるように、複数個(本説明例では3個)並べ、この複数の円錐型歯数可変歯車の歯数が変化する歯先に対し互いに噛み合い移動可能な前記請求2の伝達歯車を各円錐型歯数可変歯車の間に配し、この伝達歯車の位置を変化させることにより広範囲なギヤ比(図8の例では16:1、又図9の例では1:16となり1/16倍〜16倍即ち256段変速)の加減速とトルク制御を可能としたことを特徴とする多段メカニカルトルクコンバータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−7317(P2011−7317A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−169483(P2009−169483)
【出願日】平成21年6月29日(2009.6.29)
【出願人】(504325195)
【出願人】(509203614)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月29日(2009.6.29)
【出願人】(504325195)
【出願人】(509203614)
【Fターム(参考)】
[ Back to top ]