
歯科用ユニットアームの安全装置
【課題】 従来にあっては、アシスタントホルダーやアームが治療椅子の変位量を検出する方式であるため、平行リンク式のアームでホルダーの押し下げ、はね上げどちらも対応できるようにするため、機械的なバランスを取らなければならず構造が複雑となり、また、アシスタントホルダーやアームが治療椅子に当接することで治療椅子を停止することから、アシスタントホルダーやアームが破損する可能性があるといった問題があった。
【解決手段】 第1アームと第2アーム夫々の角度を検出するセンサを取付け、前記第1、第2アームが回転されることで歯科用ユニットホルダーが治療椅子と当接する角度を前記第1センサよりの出力と前記第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態とすることができることを特徴とする歯科用ユニットアームの安全装置である。
【解決手段】 第1アームと第2アーム夫々の角度を検出するセンサを取付け、前記第1、第2アームが回転されることで歯科用ユニットホルダーが治療椅子と当接する角度を前記第1センサよりの出力と前記第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態とすることができることを特徴とする歯科用ユニットアームの安全装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に、アシスタントホルダーが取付けられた歯科用アシスタントアームが治療椅子の背凭れ側に移動している状態において、背凭れを起伏したり座部を上下動した時にアシスタントアームに当接して、アシスタントアームや治療椅子が破損するのを防止するようにした歯科用ユニットアームの安全装置に関する。
【背景技術】
【0002】
アシスタントが使用するアシスタントアームは、一端がカスピダーユニットに回動自在に軸支された第1アームと、該第1アームの先端に一端が回動自在に軸支され先端にアシスタントホルダーが取付けられた第2アームとから構成されている。
【0003】
そして、前記第1アームと第2アームとを回動することで、歯科医の補助を行うアシスタントはアシスタントホルダーを介助し易い位置まで移動して補助することが可能なような構造となっている。
【0004】
ところで、治療椅子の背凭れの寝起き、特に、治療開始時に治療椅子を上昇させたり背凭れを伏倒させる場合や、治療が終了して背凭れを起立させると共に治療椅子を上昇させるオート動作を行うのは歯科医が行うので、アシスタントアームのホルダー位置がどの位置にあるかを確認しないで行うと背凭れの起伏時にホルダーやアームが背凭れに当接して破損する可能性があった。
【0005】
そこで、従来にあってはこのような破損を防止する手段として、例えば、特開平6−125946号公報や特開平7−250871号公報に開示されている技術がある。これらの公開公報の基本的な技術は、治療椅子の上下動や背凭れの起伏時にアシスタントホルダーやアームが上下動することをセンサが検知すると治療椅子の上下動や背凭れの起伏を停止するというものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−125946号公報
【特許文献2】特開平7−250871号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、前記した先行技術文献にあっては、アシスタントホルダーやアームが治療椅子の変位量を検出する方式であるため、平行リンク式のアームでホルダーの押し下げ、はね上げどちらも対応できるようにするため、機械的なバランスを取らなければならず構造が複雑となり、また、アシスタントホルダーやアームが治療椅子に当接することで治療椅子を停止することから、アシスタントホルダーやアームが破損する可能性があるといった問題があった。
【0008】
本発明は前記した問題点を解決せんとするもので、その目的とするところは、水平回動可能な第1アームと第2アームの回転軸部にそれぞれの回転角度を検出するセンサを設けると共に、それぞれの回転角度が予め設定した範囲以上になると治療椅子の動作を禁止するようにして、治療椅子によるアシスタントホルダーやアームおよびの治療椅子の破損を防止した歯科用ユニットアームの安全装置を提供せんとするにある。
【課題を解決するための手段】
【0009】
本発明の歯科用ユニットアームの安全装置は前記した目的を達成せんとするもので、請求項1の手段は、治療椅子の側面近傍に設置されたカスピダーユニット等の固定部材と、該固定部材に一端が回動自在に軸支された第1アームと該第1アームの先端に回動自在に軸支された第2アームおよび該第2アームの先端に取付けられたホルダーからなる歯科用ユニットホルダーと、前記固定部材側に取付けられ前記第1アームの前記固定部材に対する回転角度を検出する第1センサと、前記第1アーム側に取付けられ前記第2アームに対する回転角度を検出する第2センサとより構成し、前記第1アームと前記第2アームが回転されることで前記ホルダーが前記治療椅子と当接する角度を前記第1センサよりの出力と前記第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態とすることができることを特徴とする。
【0010】
請求項2の手段は、前記した請求項1において、前記第1センサは前記第1アームの予め設定されている回転角度以上を検出した時にオン状態となり、また、第2センサは前記第2アームの予め設定されている回転角度以下を検出した時にオン状態となって少なくともオート操作を動作禁止状態とすることを特徴とする。
【0011】
請求項3の手段は、前記した請求項1において、前記第1センサと第2センサが予め設定された回転角度の一点を検出するとオン状態となるマイクロスイッチ等のセンサであることを特徴とする。
【0012】
請求項4の手段は、前記した請求項1において、前記第1センサと第2センサが第1アーム、第2アームの回転角度を常時検出し、予め設定された回転角度に達するとオン状態となるポテンショメータ等のセンサであることを特徴とする。
【0013】
請求項5の手段は、前記した請求項1において、前記固定部材側に取付けられ前記第1アームを戻す方向に回動させる第1モータが、前記第1アーム側に取付けられ前記第2アームを戻す方向に回動させる第2モータが取付けられ、前記オート操作を動作禁止状態としている状態においてオート操作を行うと前記モータを駆動して前記ホルダーが前記治療椅子と当接しない位置に戻すようにしたことを特徴とする。
【発明の効果】
【0014】
本発明は前記したように、第1アームと第2アームが回転されることでホルダーが治療椅子と当接する角度を第1センサよりの出力と第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態としたので、前記ホルダーが治療椅子と当接する状態において従来のようにオート操作を行うことで発生するホルダーや治療椅子の破損を防止することができる。
【0015】
また、第1センサと第2センサが予め設定された回転角度の一点を検出するとオン状態となるマイクロスイッチ等のセンサとしたことにより、センサとしてのコストの低減を図ることができ、また、センサがアームの回転角度を常時検出し、予め設定された回転角度に達するとオン状態となるポテンショメータ等のセンサとしたことにより、センサとしてのコストは高くなるがオンとなる回転角度を回路的に設定することで、固定部材と治療椅子との間隔やアームの長さが異なる製品としても応用できるものとなる。
【0016】
さらに、アームを戻す方向に回動させるモータを取付け記オート操作を動作禁止状態としている状態においてオート操作を行うと前記モータを駆動してホルダーが治療椅子と当接しない位置に戻すようにしたことにより、当接しない状態まで歯科医本人あるいはアシスタントがアームに触れることなく自動的に行われ、かつ、当接しない位置まで戻った後にオート操作が行われるという効果を有するものである。
【図面の簡単な説明】
【0017】
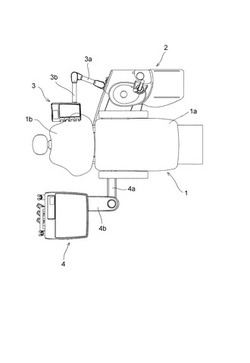
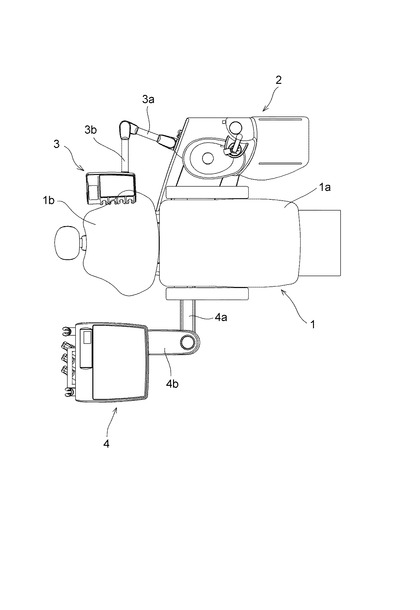
【図1】本発明に係る歯科用ユニットアームの安全装置を含むアシスタントホルダーを回動していない初期状態の平面図である。
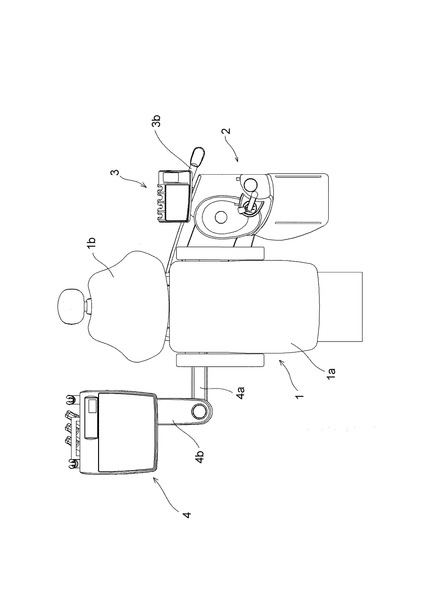
【図2】アシスタントホルダーを治療椅子に当接しない角度まで回動した状態の斜視図である。
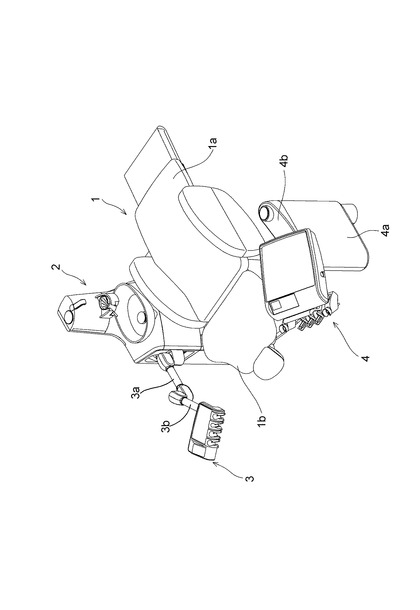
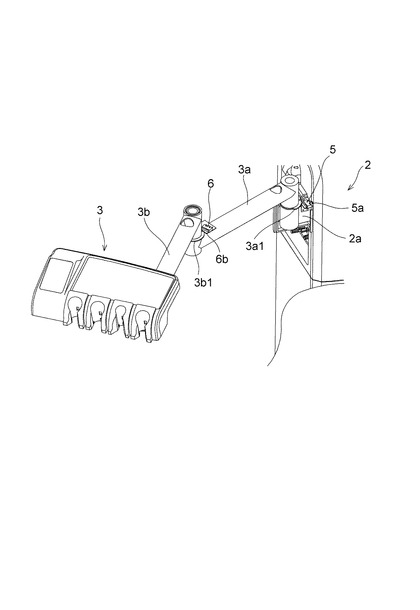
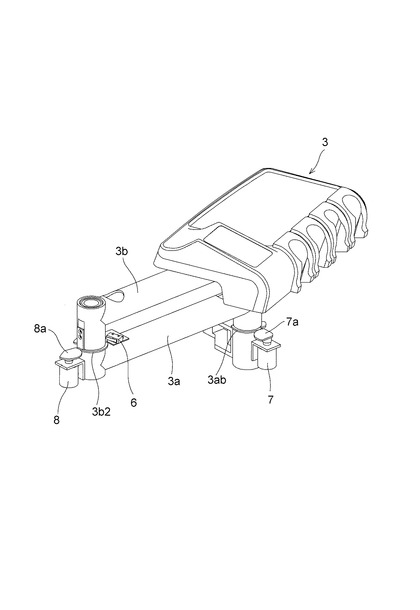
【図3】2本のアームを含むアシスタントホルダーの斜視図である。
【図4】図3の固定部材に対する第1アームの回動角度を検出する第1マイクロスイッチの動作を示し、(a)は第1マイクロスイッチがオフ状態の平面図、(b)は第1マイクロスイッチがオン状態の平面図である。
【図5】図3の第1アームに対する第2アームの回動角度を検出する第2マイクロスイッチの動作を示し、(a)は第2マイクロスイッチがオフ状態の平面図、(b)は第2マイクロスイッチがオン状態の平面図である。
【図6】第1マイクロスイッチがオフで第2マイクロスイッチがオンの状態を示す平面図である。
【図7】第1マイクロスイッチがオンで第2マイクロスイッチがオフの状態を示す平面図である。
【図8】第1マイクロスイッチがオンで第2マイクロスイッチもオンの状態を示す平面図である。
【図9】第1マイクロスイッチがオンで第2マイクロスイッチもオンの状態となった時に第1、第2アームがオフとなる位置まで戻す装置の斜視図である。
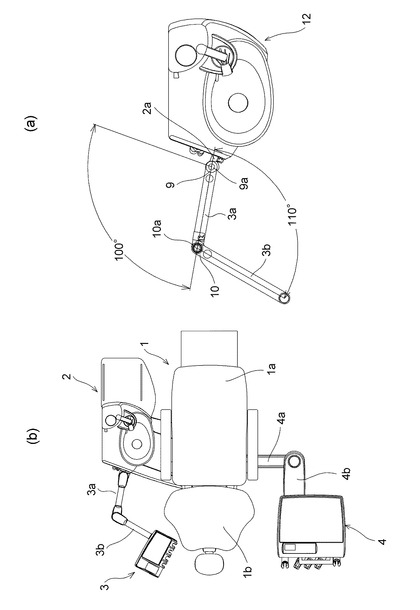
【図10】図9において第1アームと固定部材との角度が100度、第1アームと第2アームとの角度が110度の場合を示し、(a)は要部の平面図、(b)は装置全体の平面図である。
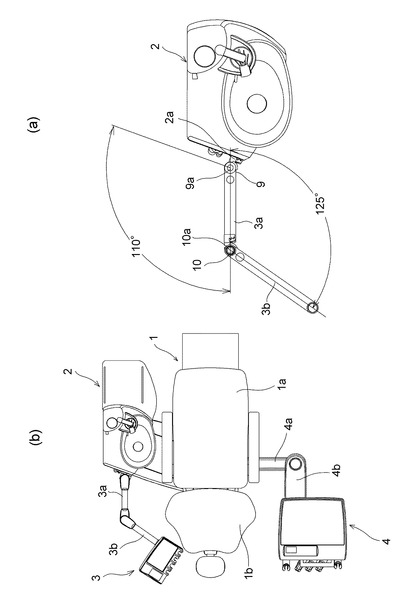
【図11】図9において第1アームと固定部材との角度が110度、第1アームと第2アームとの角度が125度の場合を示し、(a)は要部の平面図、(b)は装置全体の平面図である。
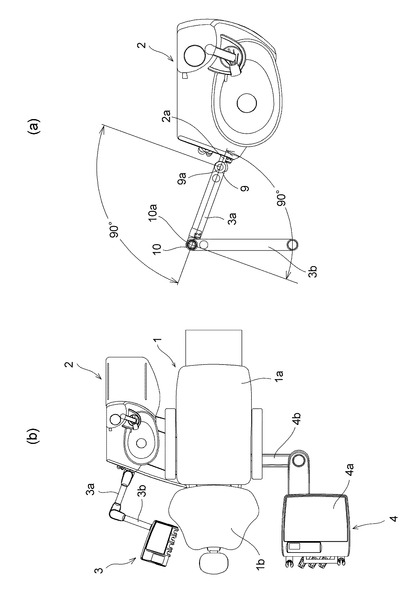
【図12】角度を検出するセンサがポテンショメータであり第1アームと固定部材との角度が90度、第1アームと第2アームとの角度が90度の場合を示し、(a)は要部の平面図、(b)は装置全体の平面図である。
【発明を実施するための形態】
【0018】
本発明に係る歯科用ユニットアームの安全装置の第1実施例を図1〜図9と共に説明する。
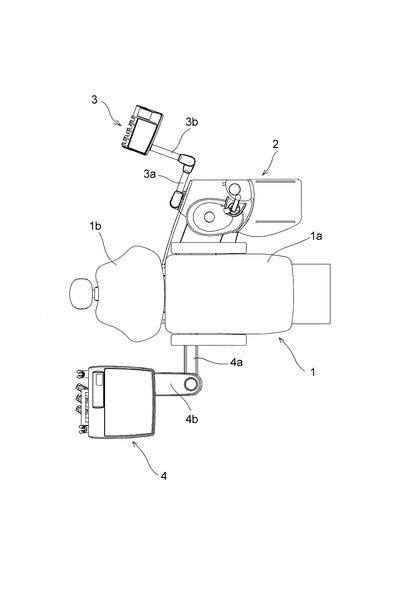
図1、図2において、1は座部1aの上下動と背凭れ1bの起伏が可能な治療椅子、2は前記治療椅子の右側に取付けられ患者が施術中に嗽を行うためのカスピダーユニット、3は前記カスピダーユニット2の前面側に回動自在に軸支された第1アーム3aおよび該第1アーム3aの先端に回動自在に軸支された第2アーム3bの先端に回動自在に軸支されたアシスタントホルダーである歯科用ユニットホルダー(以下、単にアシスタントホルダーという)、4は治療椅子1の下部に一端が回動自在に軸支された第3アーム4aおよび該第3アーム4aの先端に回動自在に軸支された第4アーム4bの先端に回動自在に軸支されたドクターホルダーである歯科用ユニットホルダー(以下、単にドクターホルダーという)である。
【0019】
なお、前記第1アーム3aを取付けるための部材としてカスピダーユニット2としたが、カスピダーユニット2に限定されるものではなく床面や治療椅子の固定部分に取付けた固定部材であってもよく、以下、固定部材という。
【0020】
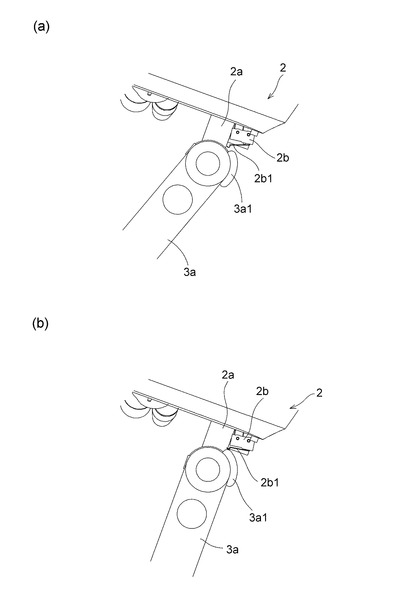
図3、図4は前記した第1アーム3aと固定部材2との角度を検出するための構造を示している。前記固定部材2の固定部2aに第1アーム3aが回動自在に軸支されている。そして、固定部2aには第1マイクロスイッチ5が取付けられ、また、第1リンク3aの回転軸部分には前記第1マイクロスイッチ5をオン・オフするための接点駆動板5aを押圧し、あるいは離開して第1マイクロスイッチ5をオン・オフするための円弧状の制御突条3a1が取付けられている。
【0021】
そして、第1アーム3aを固定部材2に対して初期位置側(図1参照)から回動して略90度以下の場合には、前記制御突条3a1は接点駆動板2b1と接触していないので、第1マイクロスイッチ5はオフ状態となっている(図4a参照)。この状態から第1アーム3aを回動して90度を越えると制御突条3a1が接点駆動板5aを押圧することとなり第1マイクロスイッチ5をオン状態とする(図4b参照)。
【0022】
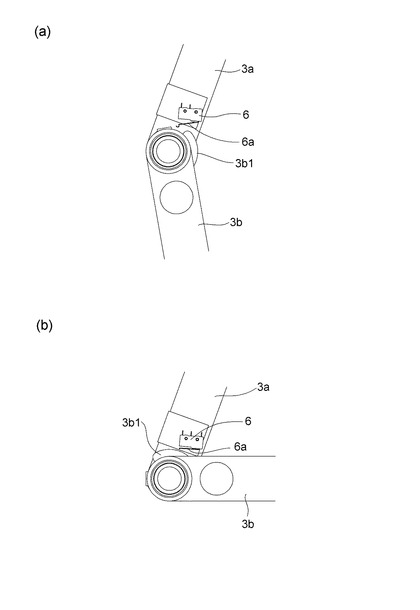
また、図3、図5は前記第2アーム3bと第1アーム3aとの角度を検出するための構造を示している。第1アーム3aにおける第2アーム3bとの軸支部には第2マイクロスイッチ6が取付けられ、また、第2リンク3bの回転軸部分には前記第2マイクロスイッチ6をオン・オフするための接点駆動板6aを押圧し、あるいは離開して第2マイクロスイッチ6をオン・オフするための円弧状の制御突条3b1が取付けられている。
【0023】
そして、第2アーム3bを第1アーム3aに対して直線状態から回動して略90度以上の場合には、前記制御突条3b1は接点駆動板6aと接触していないので、第2マイクロスイッチ6はオフ状態となっている(図5a参照)。この状態から第1アーム3aを回動して90度以下になると制御突条部3b1が接点駆動板6bを押圧することとなり第2マイクロスイッチ6をオン状態とする(図5b参照)。
【0024】
このような構造としたことにより、図1の初期状態にあっては、第1アーム3aの固定部材2に対する角度は90度以下であるので第1マイクロスイッチ5はオフ状態で、また、第2アーム3bは第1アーム3aに対する角度は90度以上であるので第2マイクロスイッチ6はオン状態となっている。
【0025】
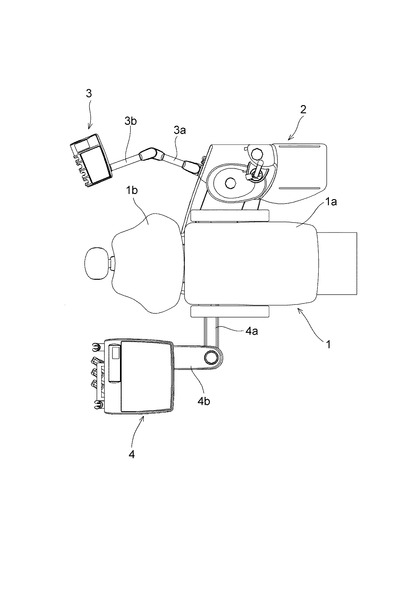
そして、この状態にあっては、治療椅子1の上下動および背凭れ1bの起伏動作を行っても、アシスタントホルダー3が背凭れ1bと当接することがないので、歯科医が初期状態(患者を導入する位置)にある治療椅子を治療状態に移行する、および治療状態から初期状態に戻すオート操作を行うことが可能となる。また、マニュアル操作も同様に行える。
【0026】
このマニュアル操作は、動作量を操作者が調整する意思を持って操作するためにアシスタントホルダー3が背凭れ1bと当接する可能性があったとしても前記意思を持って行うことから当接する危険性は低く、かつ、治療開始時に医療椅子を寝かした後はマニュアル操作によって高さや背凭れ角度を微調整することが不可欠であることからマニュアル操作が行えるようにすることが望ましいからである。
【0027】
図6にあっては、第1アーム3aの固定部材2に対する角度は90度以下であるので第1マイクロスイッチ5はオフ状態であるが、第2アーム3bは第1アーム3aに対する角度は90度以上であるので第2マイクロスイッチ6はオン状態となっている。この状態は、図1と同様なマイクロスイッチ5,6のオフ・オン状態であることから前記したと同様にオート操作とマニュアル操作が行える。
【0028】
図7にあっては、第1アーム3aの固定部材2に対する角度は90度以上であるので第1マイクロスイッチ5はオン状態であるが、第2アーム3bは第1アーム3aに対する角度は90度以下であるので第2マイクロスイッチ6はオフ状態となっている。この状態は、前記した図1、図6とは逆にマイクロスイッチ5がオンでマイクロスイッチ6がオフ状態であることから、治療椅子1の上下動および背凭れ1bの起伏動作を行っても、アシスタントホルダー3が背凭れ1bと当接することがないのでオート操作とマニュアル操作を行うことができる。
【0029】
次に、図8にあっては、第1アーム3aの固定部材2に対する角度は90度以上であるので第1マイクロスイッチ5はオン状態であるが、第2アーム3bは第1アーム3aに対する角度は90度以下であるので第2マイクロスイッチ6はオン状態となっている。この状態は、治療椅子1の上下動および背凭れ1bの起伏動作を行うと、アシスタントホルダー3が背凭れ1bと当接することとなるので歯科医が手動操作を行い治療椅子の上下動や背凭れの起伏を見ながら行うマニュアル操作のみが行えるようにして、オート操作は行えないように動作禁止状態となるものである。
【0030】
また、他の実施例を示す図10、図11における第1アーム3aと第2アーム3bの回動角度の場合には、前記した図6、図7と同様にマニュアル操作とオート操作は行える。さらに、図12における第1アーム3aと第2アーム3bの回動角度の場合には、図8と同様にアシスタントホルダー3が背凭れ1bと当接するので、マニュアル操作のみが行え、オート操作は行えないように動作禁止状態となるものである。
【0031】
なお、前記した実施例では、第1アーム3aと固定部材2との角度および第2アーム3bと第1アーム3aとの角度を検出するセンサとしてマイクロスイッチ5,6を使用した場合について説明したが、マイクロスイッチ5,6に変えて透過式あるいは反射式の光センサや磁気センサを使用しても前記した動作を行わせることが可能である。
【0032】
また、前記した実施例では、アシスタントホルダー3と治療椅子1とが当接する場合にはオート操作が行えないようにしたが、オート操作を行いたいと歯科医が思った時にはアシスタントホルダー3を手動によって図1の初期状態であるアシスタントホルダー3が背凭れ1bに当接しない状態まで歯科医本人あるいはアシスタントに行わせなければならないため面倒であるという問題があった。
【0033】
そこで、図9に示すように、固定部材2の固定部2aに第1モータ7を取付けると共に、該第1モータ7の回転軸に歯車7aを取付け、かつ、第1アーム3aの回転軸側に前記歯車7aと噛合する歯車3a2を取付ける。また、第1アーム3aの第2アーム3bが軸支された部分に第2モータ8を取付けると共に、該第2モータ8の回転軸に歯車8aを取付け、かつ、第2アーム3bの回転軸側に前記歯車8aと噛合する歯車3b2を取付ける。
【0034】
そして、このように構成した構造において、オート操作が行われた時に第1、第2モータ7,8に自動的に通電されるようにして第1アーム3aと第2アーム3bを水平回転させて初期位置方向に戻し、この戻し操作が行われたこと、すなわち、アシスタントホルダー3が治療椅子1の上下動によって背凭れ1bに当接しない位置まで戻って前記マイクロスイッチ5,6の何れかがオフ状態を検出した時に、自動的にオート操作が行われるようにしたものである。
【0035】
前記した実施例は、第1アーム3aが90度以上回動した時にマイクロスイッチ5がオン状態となり、また、第2アーム3bが90度以下に回動状態となった時にマイクロスイッチ6がオン状態となった時、すなわち、所定の一点でオート操作を操作停止状態するものであるが、第1アーム3aと第2アーム3bの回転角度をポテンショメータで常時検出し、第1アーム3aが90度以上の回転角を検出し、また、第2アーム3bが90度以下の回動角を検出した時にオート操作を操作停止状態するようにしてもよい。
【0036】
以下に、ポテンショメータの抵抗値からオート操作を操作停止状態する実施例を図10〜図12と共に説明する。
各図において、固定部材2の固定部2aに第1のポテンショメータ9を固定し、該ポテンショメータ9の回転軸9aを第1アーム3aの回転部分に取付ける。また、第1アーム3aの第2アーム3bとの回動軸部分に第2のポテンショメータ10を固定し、該ポテンショメータ10の回転軸10aを第2アーム3bの回転部分に取付けることで、第1アーム3aの固定部材2に対する回転角を常時検出でき、また、第2アーム3bの第1アーム3a対する回転角を常時検出できることになる。
【0037】
このように構成することで、図10(a)に示す第1アーム3aが固定部材2に対して90度以上である100度回動したことをポテンショメータ9が検出、また第2アーム3bが第1アーム3aに対して90度以上である110度回動したことをポテンショメータ10が検出すると、前記したマイクロスイッチ5がオン状態、マイクロスイッチ6がオフ状態と同じ構成となるので、図10(b)に示すようアシスタントフレーム2は治療椅子1が上下動し、あるいは背凭れ1bが伏倒しても非接触状態となるので、マニュアル操作およびオート操作も可能となる。
【0038】
また、図11(a)に示す第1アーム3aが固定部材2に対して90度以上である110度回動したことをポテンショメータ9が検出、また第2アーム3bが第1アーム3aに対して90度以上である125度回動したことをポテンショメータ10が検出すると、前記したマイクロスイッチ5がオン状態、マイクロスイッチ6がオフ状態と同じ構成となるので、図11(b)に示すようアシスタントフレーム2は治療椅子1が上下動し、あるいは背凭れ1bが伏倒しても非接触状態となるので、マニュアル操作およびオート操作も可能となる。
【0039】
さらに、図12(a)に示す第1アーム3aが固定部材2に対して90度回動したことをポテンショメータ9が検出、また第2アーム3bが第1アーム3aに対して90度以下回動したことをポテンショメータ10が検出すると、前記したマイクロスイッチ5がオン状態、マイクロスイッチ6がオン状態と同じ構成となるので、図12(b)に示すようアシスタントフレーム2は治療椅子1が上下動し、あるいは背凭れ1bが伏倒した場合には接触状態となるので、マニュアル操作のみ可能とし、オート操作を操作停止状態とすることになる。
【0040】
図10〜図12における角度センサとしてポテンショメータ9,10を利用した場合について説明したが、角度センサとしては多数のスリットを有する円板を透過型の光センサでパルス信号を検出したり、多数の縞模様を有する円板を反射型の光センサでパルス信号として検出する等のセンサを応用することも可能である。
【0041】
また、アシスタントホルダー3の治療椅子1との当接検出以外にドクターホルダーと治療椅子とが当接するか否かの検出を行うようにしてもよく、さらに、治療椅子1の動作禁止を行うのはオート操作のみについて説明したが、マニュアル操作時にも治療椅子1の動作禁止としてもよい。
【0042】
また、前記した実施例にあっては、第1アーム3aが固定部材2に対して90度以上の角度となり、かつ、第2アーム3bが第1アーム3aに対して90度以下の角度となったか否かを検出した場合について説明したが、固定部材2と治療椅子1との間隔や第1,第2アーム3a,3bの長さによって前記角度が異なることは当然である。従って、第1アーム3aと第2アーム3bとが回動された時にアシスタントホルダー3が治療椅子1に当接する角度は固定部材2と第1、第2アーム3a,3bの長さによって決定されるものである。
【符号の説明】
【0043】
1 治療椅子
2 固定部材
3 歯科用ユニットホルダー(アシスタントホルダー)
3a 第1アーム
3b 第2アーム
5 第1センサ(第1マイクロスイッチ)
6 第2センサ(第2マイクロスイッチ)
7 第1モータ
8 第2モータ
9 第1ポテンショメータ
10 第2ポテンショメータ
【技術分野】
【0001】
本発明は、特に、アシスタントホルダーが取付けられた歯科用アシスタントアームが治療椅子の背凭れ側に移動している状態において、背凭れを起伏したり座部を上下動した時にアシスタントアームに当接して、アシスタントアームや治療椅子が破損するのを防止するようにした歯科用ユニットアームの安全装置に関する。
【背景技術】
【0002】
アシスタントが使用するアシスタントアームは、一端がカスピダーユニットに回動自在に軸支された第1アームと、該第1アームの先端に一端が回動自在に軸支され先端にアシスタントホルダーが取付けられた第2アームとから構成されている。
【0003】
そして、前記第1アームと第2アームとを回動することで、歯科医の補助を行うアシスタントはアシスタントホルダーを介助し易い位置まで移動して補助することが可能なような構造となっている。
【0004】
ところで、治療椅子の背凭れの寝起き、特に、治療開始時に治療椅子を上昇させたり背凭れを伏倒させる場合や、治療が終了して背凭れを起立させると共に治療椅子を上昇させるオート動作を行うのは歯科医が行うので、アシスタントアームのホルダー位置がどの位置にあるかを確認しないで行うと背凭れの起伏時にホルダーやアームが背凭れに当接して破損する可能性があった。
【0005】
そこで、従来にあってはこのような破損を防止する手段として、例えば、特開平6−125946号公報や特開平7−250871号公報に開示されている技術がある。これらの公開公報の基本的な技術は、治療椅子の上下動や背凭れの起伏時にアシスタントホルダーやアームが上下動することをセンサが検知すると治療椅子の上下動や背凭れの起伏を停止するというものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−125946号公報
【特許文献2】特開平7−250871号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、前記した先行技術文献にあっては、アシスタントホルダーやアームが治療椅子の変位量を検出する方式であるため、平行リンク式のアームでホルダーの押し下げ、はね上げどちらも対応できるようにするため、機械的なバランスを取らなければならず構造が複雑となり、また、アシスタントホルダーやアームが治療椅子に当接することで治療椅子を停止することから、アシスタントホルダーやアームが破損する可能性があるといった問題があった。
【0008】
本発明は前記した問題点を解決せんとするもので、その目的とするところは、水平回動可能な第1アームと第2アームの回転軸部にそれぞれの回転角度を検出するセンサを設けると共に、それぞれの回転角度が予め設定した範囲以上になると治療椅子の動作を禁止するようにして、治療椅子によるアシスタントホルダーやアームおよびの治療椅子の破損を防止した歯科用ユニットアームの安全装置を提供せんとするにある。
【課題を解決するための手段】
【0009】
本発明の歯科用ユニットアームの安全装置は前記した目的を達成せんとするもので、請求項1の手段は、治療椅子の側面近傍に設置されたカスピダーユニット等の固定部材と、該固定部材に一端が回動自在に軸支された第1アームと該第1アームの先端に回動自在に軸支された第2アームおよび該第2アームの先端に取付けられたホルダーからなる歯科用ユニットホルダーと、前記固定部材側に取付けられ前記第1アームの前記固定部材に対する回転角度を検出する第1センサと、前記第1アーム側に取付けられ前記第2アームに対する回転角度を検出する第2センサとより構成し、前記第1アームと前記第2アームが回転されることで前記ホルダーが前記治療椅子と当接する角度を前記第1センサよりの出力と前記第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態とすることができることを特徴とする。
【0010】
請求項2の手段は、前記した請求項1において、前記第1センサは前記第1アームの予め設定されている回転角度以上を検出した時にオン状態となり、また、第2センサは前記第2アームの予め設定されている回転角度以下を検出した時にオン状態となって少なくともオート操作を動作禁止状態とすることを特徴とする。
【0011】
請求項3の手段は、前記した請求項1において、前記第1センサと第2センサが予め設定された回転角度の一点を検出するとオン状態となるマイクロスイッチ等のセンサであることを特徴とする。
【0012】
請求項4の手段は、前記した請求項1において、前記第1センサと第2センサが第1アーム、第2アームの回転角度を常時検出し、予め設定された回転角度に達するとオン状態となるポテンショメータ等のセンサであることを特徴とする。
【0013】
請求項5の手段は、前記した請求項1において、前記固定部材側に取付けられ前記第1アームを戻す方向に回動させる第1モータが、前記第1アーム側に取付けられ前記第2アームを戻す方向に回動させる第2モータが取付けられ、前記オート操作を動作禁止状態としている状態においてオート操作を行うと前記モータを駆動して前記ホルダーが前記治療椅子と当接しない位置に戻すようにしたことを特徴とする。
【発明の効果】
【0014】
本発明は前記したように、第1アームと第2アームが回転されることでホルダーが治療椅子と当接する角度を第1センサよりの出力と第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態としたので、前記ホルダーが治療椅子と当接する状態において従来のようにオート操作を行うことで発生するホルダーや治療椅子の破損を防止することができる。
【0015】
また、第1センサと第2センサが予め設定された回転角度の一点を検出するとオン状態となるマイクロスイッチ等のセンサとしたことにより、センサとしてのコストの低減を図ることができ、また、センサがアームの回転角度を常時検出し、予め設定された回転角度に達するとオン状態となるポテンショメータ等のセンサとしたことにより、センサとしてのコストは高くなるがオンとなる回転角度を回路的に設定することで、固定部材と治療椅子との間隔やアームの長さが異なる製品としても応用できるものとなる。
【0016】
さらに、アームを戻す方向に回動させるモータを取付け記オート操作を動作禁止状態としている状態においてオート操作を行うと前記モータを駆動してホルダーが治療椅子と当接しない位置に戻すようにしたことにより、当接しない状態まで歯科医本人あるいはアシスタントがアームに触れることなく自動的に行われ、かつ、当接しない位置まで戻った後にオート操作が行われるという効果を有するものである。
【図面の簡単な説明】
【0017】
【図1】本発明に係る歯科用ユニットアームの安全装置を含むアシスタントホルダーを回動していない初期状態の平面図である。
【図2】アシスタントホルダーを治療椅子に当接しない角度まで回動した状態の斜視図である。
【図3】2本のアームを含むアシスタントホルダーの斜視図である。
【図4】図3の固定部材に対する第1アームの回動角度を検出する第1マイクロスイッチの動作を示し、(a)は第1マイクロスイッチがオフ状態の平面図、(b)は第1マイクロスイッチがオン状態の平面図である。
【図5】図3の第1アームに対する第2アームの回動角度を検出する第2マイクロスイッチの動作を示し、(a)は第2マイクロスイッチがオフ状態の平面図、(b)は第2マイクロスイッチがオン状態の平面図である。
【図6】第1マイクロスイッチがオフで第2マイクロスイッチがオンの状態を示す平面図である。
【図7】第1マイクロスイッチがオンで第2マイクロスイッチがオフの状態を示す平面図である。
【図8】第1マイクロスイッチがオンで第2マイクロスイッチもオンの状態を示す平面図である。
【図9】第1マイクロスイッチがオンで第2マイクロスイッチもオンの状態となった時に第1、第2アームがオフとなる位置まで戻す装置の斜視図である。
【図10】図9において第1アームと固定部材との角度が100度、第1アームと第2アームとの角度が110度の場合を示し、(a)は要部の平面図、(b)は装置全体の平面図である。
【図11】図9において第1アームと固定部材との角度が110度、第1アームと第2アームとの角度が125度の場合を示し、(a)は要部の平面図、(b)は装置全体の平面図である。
【図12】角度を検出するセンサがポテンショメータであり第1アームと固定部材との角度が90度、第1アームと第2アームとの角度が90度の場合を示し、(a)は要部の平面図、(b)は装置全体の平面図である。
【発明を実施するための形態】
【0018】
本発明に係る歯科用ユニットアームの安全装置の第1実施例を図1〜図9と共に説明する。
図1、図2において、1は座部1aの上下動と背凭れ1bの起伏が可能な治療椅子、2は前記治療椅子の右側に取付けられ患者が施術中に嗽を行うためのカスピダーユニット、3は前記カスピダーユニット2の前面側に回動自在に軸支された第1アーム3aおよび該第1アーム3aの先端に回動自在に軸支された第2アーム3bの先端に回動自在に軸支されたアシスタントホルダーである歯科用ユニットホルダー(以下、単にアシスタントホルダーという)、4は治療椅子1の下部に一端が回動自在に軸支された第3アーム4aおよび該第3アーム4aの先端に回動自在に軸支された第4アーム4bの先端に回動自在に軸支されたドクターホルダーである歯科用ユニットホルダー(以下、単にドクターホルダーという)である。
【0019】
なお、前記第1アーム3aを取付けるための部材としてカスピダーユニット2としたが、カスピダーユニット2に限定されるものではなく床面や治療椅子の固定部分に取付けた固定部材であってもよく、以下、固定部材という。
【0020】
図3、図4は前記した第1アーム3aと固定部材2との角度を検出するための構造を示している。前記固定部材2の固定部2aに第1アーム3aが回動自在に軸支されている。そして、固定部2aには第1マイクロスイッチ5が取付けられ、また、第1リンク3aの回転軸部分には前記第1マイクロスイッチ5をオン・オフするための接点駆動板5aを押圧し、あるいは離開して第1マイクロスイッチ5をオン・オフするための円弧状の制御突条3a1が取付けられている。
【0021】
そして、第1アーム3aを固定部材2に対して初期位置側(図1参照)から回動して略90度以下の場合には、前記制御突条3a1は接点駆動板2b1と接触していないので、第1マイクロスイッチ5はオフ状態となっている(図4a参照)。この状態から第1アーム3aを回動して90度を越えると制御突条3a1が接点駆動板5aを押圧することとなり第1マイクロスイッチ5をオン状態とする(図4b参照)。
【0022】
また、図3、図5は前記第2アーム3bと第1アーム3aとの角度を検出するための構造を示している。第1アーム3aにおける第2アーム3bとの軸支部には第2マイクロスイッチ6が取付けられ、また、第2リンク3bの回転軸部分には前記第2マイクロスイッチ6をオン・オフするための接点駆動板6aを押圧し、あるいは離開して第2マイクロスイッチ6をオン・オフするための円弧状の制御突条3b1が取付けられている。
【0023】
そして、第2アーム3bを第1アーム3aに対して直線状態から回動して略90度以上の場合には、前記制御突条3b1は接点駆動板6aと接触していないので、第2マイクロスイッチ6はオフ状態となっている(図5a参照)。この状態から第1アーム3aを回動して90度以下になると制御突条部3b1が接点駆動板6bを押圧することとなり第2マイクロスイッチ6をオン状態とする(図5b参照)。
【0024】
このような構造としたことにより、図1の初期状態にあっては、第1アーム3aの固定部材2に対する角度は90度以下であるので第1マイクロスイッチ5はオフ状態で、また、第2アーム3bは第1アーム3aに対する角度は90度以上であるので第2マイクロスイッチ6はオン状態となっている。
【0025】
そして、この状態にあっては、治療椅子1の上下動および背凭れ1bの起伏動作を行っても、アシスタントホルダー3が背凭れ1bと当接することがないので、歯科医が初期状態(患者を導入する位置)にある治療椅子を治療状態に移行する、および治療状態から初期状態に戻すオート操作を行うことが可能となる。また、マニュアル操作も同様に行える。
【0026】
このマニュアル操作は、動作量を操作者が調整する意思を持って操作するためにアシスタントホルダー3が背凭れ1bと当接する可能性があったとしても前記意思を持って行うことから当接する危険性は低く、かつ、治療開始時に医療椅子を寝かした後はマニュアル操作によって高さや背凭れ角度を微調整することが不可欠であることからマニュアル操作が行えるようにすることが望ましいからである。
【0027】
図6にあっては、第1アーム3aの固定部材2に対する角度は90度以下であるので第1マイクロスイッチ5はオフ状態であるが、第2アーム3bは第1アーム3aに対する角度は90度以上であるので第2マイクロスイッチ6はオン状態となっている。この状態は、図1と同様なマイクロスイッチ5,6のオフ・オン状態であることから前記したと同様にオート操作とマニュアル操作が行える。
【0028】
図7にあっては、第1アーム3aの固定部材2に対する角度は90度以上であるので第1マイクロスイッチ5はオン状態であるが、第2アーム3bは第1アーム3aに対する角度は90度以下であるので第2マイクロスイッチ6はオフ状態となっている。この状態は、前記した図1、図6とは逆にマイクロスイッチ5がオンでマイクロスイッチ6がオフ状態であることから、治療椅子1の上下動および背凭れ1bの起伏動作を行っても、アシスタントホルダー3が背凭れ1bと当接することがないのでオート操作とマニュアル操作を行うことができる。
【0029】
次に、図8にあっては、第1アーム3aの固定部材2に対する角度は90度以上であるので第1マイクロスイッチ5はオン状態であるが、第2アーム3bは第1アーム3aに対する角度は90度以下であるので第2マイクロスイッチ6はオン状態となっている。この状態は、治療椅子1の上下動および背凭れ1bの起伏動作を行うと、アシスタントホルダー3が背凭れ1bと当接することとなるので歯科医が手動操作を行い治療椅子の上下動や背凭れの起伏を見ながら行うマニュアル操作のみが行えるようにして、オート操作は行えないように動作禁止状態となるものである。
【0030】
また、他の実施例を示す図10、図11における第1アーム3aと第2アーム3bの回動角度の場合には、前記した図6、図7と同様にマニュアル操作とオート操作は行える。さらに、図12における第1アーム3aと第2アーム3bの回動角度の場合には、図8と同様にアシスタントホルダー3が背凭れ1bと当接するので、マニュアル操作のみが行え、オート操作は行えないように動作禁止状態となるものである。
【0031】
なお、前記した実施例では、第1アーム3aと固定部材2との角度および第2アーム3bと第1アーム3aとの角度を検出するセンサとしてマイクロスイッチ5,6を使用した場合について説明したが、マイクロスイッチ5,6に変えて透過式あるいは反射式の光センサや磁気センサを使用しても前記した動作を行わせることが可能である。
【0032】
また、前記した実施例では、アシスタントホルダー3と治療椅子1とが当接する場合にはオート操作が行えないようにしたが、オート操作を行いたいと歯科医が思った時にはアシスタントホルダー3を手動によって図1の初期状態であるアシスタントホルダー3が背凭れ1bに当接しない状態まで歯科医本人あるいはアシスタントに行わせなければならないため面倒であるという問題があった。
【0033】
そこで、図9に示すように、固定部材2の固定部2aに第1モータ7を取付けると共に、該第1モータ7の回転軸に歯車7aを取付け、かつ、第1アーム3aの回転軸側に前記歯車7aと噛合する歯車3a2を取付ける。また、第1アーム3aの第2アーム3bが軸支された部分に第2モータ8を取付けると共に、該第2モータ8の回転軸に歯車8aを取付け、かつ、第2アーム3bの回転軸側に前記歯車8aと噛合する歯車3b2を取付ける。
【0034】
そして、このように構成した構造において、オート操作が行われた時に第1、第2モータ7,8に自動的に通電されるようにして第1アーム3aと第2アーム3bを水平回転させて初期位置方向に戻し、この戻し操作が行われたこと、すなわち、アシスタントホルダー3が治療椅子1の上下動によって背凭れ1bに当接しない位置まで戻って前記マイクロスイッチ5,6の何れかがオフ状態を検出した時に、自動的にオート操作が行われるようにしたものである。
【0035】
前記した実施例は、第1アーム3aが90度以上回動した時にマイクロスイッチ5がオン状態となり、また、第2アーム3bが90度以下に回動状態となった時にマイクロスイッチ6がオン状態となった時、すなわち、所定の一点でオート操作を操作停止状態するものであるが、第1アーム3aと第2アーム3bの回転角度をポテンショメータで常時検出し、第1アーム3aが90度以上の回転角を検出し、また、第2アーム3bが90度以下の回動角を検出した時にオート操作を操作停止状態するようにしてもよい。
【0036】
以下に、ポテンショメータの抵抗値からオート操作を操作停止状態する実施例を図10〜図12と共に説明する。
各図において、固定部材2の固定部2aに第1のポテンショメータ9を固定し、該ポテンショメータ9の回転軸9aを第1アーム3aの回転部分に取付ける。また、第1アーム3aの第2アーム3bとの回動軸部分に第2のポテンショメータ10を固定し、該ポテンショメータ10の回転軸10aを第2アーム3bの回転部分に取付けることで、第1アーム3aの固定部材2に対する回転角を常時検出でき、また、第2アーム3bの第1アーム3a対する回転角を常時検出できることになる。
【0037】
このように構成することで、図10(a)に示す第1アーム3aが固定部材2に対して90度以上である100度回動したことをポテンショメータ9が検出、また第2アーム3bが第1アーム3aに対して90度以上である110度回動したことをポテンショメータ10が検出すると、前記したマイクロスイッチ5がオン状態、マイクロスイッチ6がオフ状態と同じ構成となるので、図10(b)に示すようアシスタントフレーム2は治療椅子1が上下動し、あるいは背凭れ1bが伏倒しても非接触状態となるので、マニュアル操作およびオート操作も可能となる。
【0038】
また、図11(a)に示す第1アーム3aが固定部材2に対して90度以上である110度回動したことをポテンショメータ9が検出、また第2アーム3bが第1アーム3aに対して90度以上である125度回動したことをポテンショメータ10が検出すると、前記したマイクロスイッチ5がオン状態、マイクロスイッチ6がオフ状態と同じ構成となるので、図11(b)に示すようアシスタントフレーム2は治療椅子1が上下動し、あるいは背凭れ1bが伏倒しても非接触状態となるので、マニュアル操作およびオート操作も可能となる。
【0039】
さらに、図12(a)に示す第1アーム3aが固定部材2に対して90度回動したことをポテンショメータ9が検出、また第2アーム3bが第1アーム3aに対して90度以下回動したことをポテンショメータ10が検出すると、前記したマイクロスイッチ5がオン状態、マイクロスイッチ6がオン状態と同じ構成となるので、図12(b)に示すようアシスタントフレーム2は治療椅子1が上下動し、あるいは背凭れ1bが伏倒した場合には接触状態となるので、マニュアル操作のみ可能とし、オート操作を操作停止状態とすることになる。
【0040】
図10〜図12における角度センサとしてポテンショメータ9,10を利用した場合について説明したが、角度センサとしては多数のスリットを有する円板を透過型の光センサでパルス信号を検出したり、多数の縞模様を有する円板を反射型の光センサでパルス信号として検出する等のセンサを応用することも可能である。
【0041】
また、アシスタントホルダー3の治療椅子1との当接検出以外にドクターホルダーと治療椅子とが当接するか否かの検出を行うようにしてもよく、さらに、治療椅子1の動作禁止を行うのはオート操作のみについて説明したが、マニュアル操作時にも治療椅子1の動作禁止としてもよい。
【0042】
また、前記した実施例にあっては、第1アーム3aが固定部材2に対して90度以上の角度となり、かつ、第2アーム3bが第1アーム3aに対して90度以下の角度となったか否かを検出した場合について説明したが、固定部材2と治療椅子1との間隔や第1,第2アーム3a,3bの長さによって前記角度が異なることは当然である。従って、第1アーム3aと第2アーム3bとが回動された時にアシスタントホルダー3が治療椅子1に当接する角度は固定部材2と第1、第2アーム3a,3bの長さによって決定されるものである。
【符号の説明】
【0043】
1 治療椅子
2 固定部材
3 歯科用ユニットホルダー(アシスタントホルダー)
3a 第1アーム
3b 第2アーム
5 第1センサ(第1マイクロスイッチ)
6 第2センサ(第2マイクロスイッチ)
7 第1モータ
8 第2モータ
9 第1ポテンショメータ
10 第2ポテンショメータ
【特許請求の範囲】
【請求項1】
治療椅子の側面近傍に設置されたカスピダーユニット等の固定部材と、
該固定部材に一端が回動自在に軸支された第1アームと該第1アームの先端に回動自在に軸支された第2アームおよび該第2アームの先端に取付けられたホルダーからなる歯科用ユニットホルダーと、
前記固定部材側に取付けられ前記第1アームの前記固定部材に対する回転角度を検出する第1センサと、
前記第1アーム側に取付けられ前記第2アームに対する回転角度を検出する第2センサとより構成し、
前記第1アームと前記第2アームが回転されることで前記ホルダーが前記治療椅子と当接する角度を前記第1センサよりの出力と前記第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態とすることができることを特徴とする歯科用ユニットアームの安全装置。
【請求項2】
前記第1センサは前記第1アームの予め設定されている回転角度以上を検出した時にオン状態となり、また、第2センサは前記第2アームの予め設定されている回転角度以下を検出した時にオン状態となって少なくともオート操作を動作禁止状態とすることを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項3】
前記第1センサと第2センサが予め設定された回転角度の一点を検出するとオン状態となるマイクロスイッチ等のセンサであることを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項4】
前記第1センサと第2センサが第1アーム、第2アームの回転角度を常時検出し、予め設定された回転角度に達するとオン状態となるポテンショメータ等のセンサであることを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項5】
前記固定部材側に取付けられ前記第1アームを戻す方向に回動させる第1モータが、前記第1アーム側に取付けられ前記第2アームを戻す方向に回動させる第2モータが取付けられ、前記オート操作を動作禁止状態としている状態においてオート操作を行うと前記モータを駆動して前記ホルダーが前記治療椅子と当接しない位置に戻すようにしたことを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項1】
治療椅子の側面近傍に設置されたカスピダーユニット等の固定部材と、
該固定部材に一端が回動自在に軸支された第1アームと該第1アームの先端に回動自在に軸支された第2アームおよび該第2アームの先端に取付けられたホルダーからなる歯科用ユニットホルダーと、
前記固定部材側に取付けられ前記第1アームの前記固定部材に対する回転角度を検出する第1センサと、
前記第1アーム側に取付けられ前記第2アームに対する回転角度を検出する第2センサとより構成し、
前記第1アームと前記第2アームが回転されることで前記ホルダーが前記治療椅子と当接する角度を前記第1センサよりの出力と前記第2センサよりの出力を検出すると少なくともオート操作を動作禁止状態とすることができることを特徴とする歯科用ユニットアームの安全装置。
【請求項2】
前記第1センサは前記第1アームの予め設定されている回転角度以上を検出した時にオン状態となり、また、第2センサは前記第2アームの予め設定されている回転角度以下を検出した時にオン状態となって少なくともオート操作を動作禁止状態とすることを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項3】
前記第1センサと第2センサが予め設定された回転角度の一点を検出するとオン状態となるマイクロスイッチ等のセンサであることを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項4】
前記第1センサと第2センサが第1アーム、第2アームの回転角度を常時検出し、予め設定された回転角度に達するとオン状態となるポテンショメータ等のセンサであることを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【請求項5】
前記固定部材側に取付けられ前記第1アームを戻す方向に回動させる第1モータが、前記第1アーム側に取付けられ前記第2アームを戻す方向に回動させる第2モータが取付けられ、前記オート操作を動作禁止状態としている状態においてオート操作を行うと前記モータを駆動して前記ホルダーが前記治療椅子と当接しない位置に戻すようにしたことを特徴とする請求項1記載の歯科用ユニットアームの安全装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−80978(P2012−80978A)
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願番号】特願2010−228008(P2010−228008)
【出願日】平成22年10月7日(2010.10.7)
【出願人】(000108672)タカラベルモント株式会社 (113)
【Fターム(参考)】
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願日】平成22年10月7日(2010.10.7)
【出願人】(000108672)タカラベルモント株式会社 (113)
【Fターム(参考)】
[ Back to top ]