
歯車形軸継手の使用限界判定方法
【課題】歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行う
【解決手段】 内歯車5を有する外筒6と、外歯車4を有する内筒3とを備える歯車形軸継手に外筒6に連動して回転する第1反射体11、および、内筒3に連動して回転する第2反射体10を設置し、駆動側軸1bの回転数と同調して発光させた光を第1反射体11および第2反射体10に照射し、反射光から把握される第1反射体11および第2反射体10の相対的な位置関係により歯車の摩耗量を検知し、歯車形軸継手の使用限界を判定する。
【解決手段】 内歯車5を有する外筒6と、外歯車4を有する内筒3とを備える歯車形軸継手に外筒6に連動して回転する第1反射体11、および、内筒3に連動して回転する第2反射体10を設置し、駆動側軸1bの回転数と同調して発光させた光を第1反射体11および第2反射体10に照射し、反射光から把握される第1反射体11および第2反射体10の相対的な位置関係により歯車の摩耗量を検知し、歯車形軸継手の使用限界を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歯車形軸継手(ギヤカップリング)を稼動中に開放せずに内部の歯車の使用限界を判定する方法に関するものである。
【背景技術】
【0002】
従来、歯車形軸継手を開放せずに歯車形軸継手の内部歯車の使用限界を判定することについては、種々提案されている。
【0003】
例えば、特許文献1には、歯車継手部の歯車摩耗量を、歯車の正転逆転時のバックラッシの動きにより検出する装置において、歯車継手部外筒内筒のいずれか一方にペン書き装置を他方に記録紙を設置し、前記歯車継手部のバックラッシの相対的なずれ量を検出し、ずれ量をペン書き装置で記録紙に記録するようにした、歯車継手部の歯車の摩耗量を検出する装置に関する発明が提案されている。
【0004】
また、特許文献2には、歯車形軸継手の駆動側と負荷側の各々に1回転で1パルス検出するパルス検出器を設け、正転時の駆動側パルスと負荷側パルスの検出時間間隔と、逆転時の同時間間隔の差から駆動側、負荷側のギヤ間のバックラッシを測定して、歯車(ギヤ)の摩耗量を検出する歯車形軸継手における歯車摩耗量検出方法の発明が提案されている。
【0005】
【特許文献1】特開平5−280905号公報
【特許文献2】特公昭59−41136号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
特許文献1で提案されている歯車形軸継手における使用限界の検出方法では、バックラッシのずれ量の検出確認を、稼動中の設備を停止させ記録紙を回収して行う必要があり、稼働率の低下等、実用上問題があった。
【0007】
特許文献2で提案されている歯車形軸継手における使用限界の検出方法では、パルスの発信器および検出器を設ける必要があり、また、正転逆転しなければ、摩耗量の推定ができないため、操業中同一方向に回転する機械では、一時的に操業を中止して行わざるをえず、操業中に検出を行えるものではなかった。
【0008】
本発明は、上記のような問題点を解決するために発明したもので、稼動中の設備における歯車の摩耗量の検出が可能であり、歯車形軸継手を開放することなく、歯車形軸継手の使用限界を判定する方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、下記の(1)〜(3)に示す歯車形軸継手の使用限界判定方法を要旨とする。
【0010】
(1)内歯車を有する外筒と、外歯車を有する内筒とを備える歯車形軸継手の使用限界判定方法であって、外筒に連動して回転する第1反射体、および、内筒に連動して回転する第2反射体を設置し、駆動側軸の回転数と同調して発光させた光を第1反射体および第2反射体に照射し、反射光から把握される第1反射体および第2反射体の相対的な位置関係により歯車の摩耗量を検知する歯車形軸継手の使用限界判定方法。
【0011】
(2)第1反射体および第2反射体が、隣り合う位置で回転するように設けられている上記(1)の歯車形軸継手の使用限界判定方法。
【0012】
(3)第1反射体および第2反射体のいずれか一方が、基準位置を示し、他方が歯車の摩耗量の許容範囲を示す上記(1)または(2)の歯車形軸継手の使用限界判定方法。
【発明の効果】
【0013】
本発明によれば、簡易的な方法により、歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行うことができる。
【発明を実施するための最良の形態】
【0014】
以下、図を使って、本発明に係る歯車形軸継手の使用限界判定方法の例を説明する。
【0015】
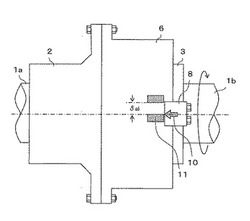
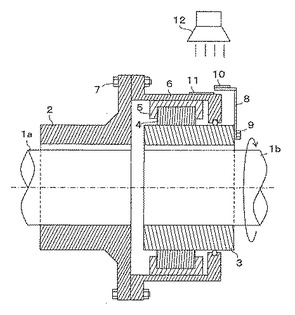
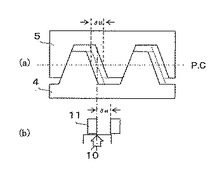
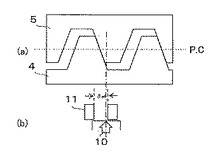
図1は、本発明で用いる反射体を設置した歯車形軸継手の一部を断面で表した側面図を示しており、図2は、同歯車形軸継手の上面図を示している。
【0016】
図1および図2に示すように、本発明の対象である歯車形軸継手は、内歯車5を有する外筒6と、外歯車4を有する内筒3とを備え、例えば、内筒3が駆動側軸1bに接続されており、駆動側軸1bに連動して回転し、内筒3の回転は、その外歯車4と噛み合う内歯車5に伝えられ、外筒6が内筒3に連動して回転することにより、負荷側軸1aが回転する仕組みを有する継手である。ここで、負荷側軸1aは、固定フランジ2と接続され、固定フランジ2と外筒6とは、ボルト、ナット7を介して連結されている。
【0017】
本発明に係る歯車形軸継手の使用限界判定方法においては、外筒6に連動して回転する第1反射体11と、内筒3に連動して回転する第2反射体10を設置し、さらに、第1反射体11および第2反射体10に光を照射することができるストロボ発光装置などの発光装置12を設置する。そして、発光装置12は、駆動側軸1bの回転数と同調して光を発光し、その光を第1反射体11および第2反射体10に照射する。これにより、反射光だけに着目すれば、駆動側軸1bの回転を見かけ上停止させることができる。そして、本発明に係る歯車形軸継手の使用限界判定方法は、その発光周期毎に観測される反射光を、例えばカメラ(このカメラも駆動側軸1bの回転数と同調して撮影するのがよい。)で撮影し、そこから把握される第1反射体11および第2反射体10の相対的な位置関係をモニターすることにより、歯車の摩耗量を検知するものである。
【0018】
すなわち、歯車形軸継手が使用されることにより、内筒3の外歯車4および外筒6の内歯車5の接触面が摩耗し、バックラッシにずれが生じてくると、第1反射体11および第2反射体10の相対的な位置関係が変化する。本発明に係る歯車形軸継手の使用限界判定方法においては、上記のように、第1反射体11および第2反射体10の相対的な位置関係を外部から把握することができるので、歯車形軸継手を開放することなく、稼動中の歯車の摩耗量の検出をすることができる。また、画像処理技術を利用すれば、このストロボ発光により見かけ上停止させた反射シールの変位量を常時監視することも可能である。
【0019】
ここで、第1反射体11および第2反射体10の設置位置については、外部から認識できる位置であればよいが、例えば、図1および図2に示すように、これらの反射体同士は、隣り合う位置で回転するように設けられていることが望ましい。このような構成とすれば、第1反射体11および第2反射体10の相対的な位置関係を把握しやすくなる。また、第1反射体11および第2反射体10が相互に離れた位置に設置されていると、一つのストロボ発光器およびカメラだけでは相対的な位置関係を把握するのが困難となるが、反射体同士が隣り合う位置で回転するように設けられておれば、このような問題がない。
【0020】
このとき、例えば、図1および図2に示すように、内筒3にボルト9で固定された金物(ガイド)8上に第2反射体10を貼り付け、外筒6に第1反射体11を貼り付けることにより、第1反射体11および第2反射体10をそれぞれに隣接する位置に設けることができる。
【0021】
本発明に係る歯車形軸継手の使用限界判定方法においては、第1反射体および第2反射体のいずれか一方が、基準位置を示し、他方が歯車の摩耗量の許容範囲を示すような構成とすることにより、歯車形軸継手の使用限界をより把握しやすくなる。即ち、例えば、図2に示すように、第1反射体11として2枚の矩形反射シール(図2の11)を用意し、第2反射体10として、矢印形の反射シール(図2の10)を用意する。このとき、矢印形の反射シールが基準位置を示し、2枚の矩形反射シールに挟まれたエリアが歯車の摩耗量の許容範囲を示している。この使用限界判定方法においては、矢印形の反射シールの先端が2枚の矩形反射シールに挟まれたエリアから外れると、歯車の摩耗量が許容値を超えたことを意味する。
【0022】
以下、図3〜図5を用いて、本発明に係る歯車形軸継手の使用限界判定方法の原理を詳しく説明する。
【0023】
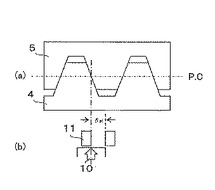
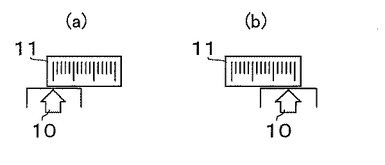
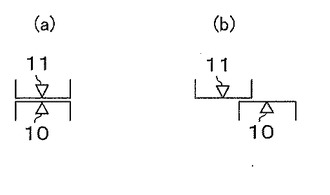
図3は、未使用の歯車形軸継手における外歯車及び内歯車の位置関係を示す模式図であり、図4および図5はいずれも、一定期間使用した歯車形軸継手における外歯車及び内歯車の位置関係を示す模式図である。図4は、負荷を与えていない状態、図5は、負荷を与えている状態での位置関係を示し、図3〜図5のいずれにおいても、(a)は歯車の噛み合わせ状況を示す拡大図、(b)は第1反射体および第2反射体の位置関係を示す図である。
【0024】
なお、実際の歯車形軸継手では、外歯車、内歯車ともに湾曲しているが、図3〜図5では、歯車形軸継手のピッチ円を直線で表している。また、実際の歯車形軸継手では、外歯車、内歯車ともに、その山部がR形状であり、また、若干のバックラッシがあるが、図3〜図5ではこれらを省略している。さらに、歯車形軸継手には、正方向および逆方向のいずれにも回転させる方式のものがあるが、図3〜図5では、基本的に正方向にしか回転させず、歯車の山の一面のみが摩耗する方式のものを示している。
【0025】
図3(a)に示すように、歯車形軸継手における外歯車4及び内歯車5は、未使用の初期状態においては、決められたバックラッシがあるものの、ほとんど隙間がなく噛み合わされた状態である。このとき、バックラッシのズレ量の許容範囲をδalとし、第1反射体11および第2反射体10を、例えば、図3(b)に示すように設置するものとする。そして、歯車形軸継手の使用を重ねることによって、外歯車4、内歯車5とも、その接触面が摩耗し、図4(a)のような状態となったとする。このときのバックラッシのズレ量をδblとする。図4(b)に示すように、この歯車形軸継手に負荷を与えなければ、第1反射体11および第2反射体10の位置関係は、図3(b)に示す初期状態と変わらない。即ち、この状態では、バックラッシのズレ量を把握することができない。
【0026】
しかし、図5(a)に示すように、この歯車形軸継手に負荷を与えた場合、内筒の外歯車4および外筒の内歯車5それぞれの摩耗量に応じて、バックラッシが初期値からずれることになる。このとき、図5(b)に示すように、第2反射体10の矢印の位置が図面右方向に移動する。図5に示す例の場合、このバックラッシのズレ量δblがバックラッシのズレ量の許容範囲δalと同等であり、歯車形軸継手の交換時期が近づいていることが分かる。
【0027】
このように、本発明に係る歯車形軸継手の使用限界判定方法においては、それぞれ外筒6および内筒3に連動して回転する第1反射体11および第2反射体10の相対的な位置関係を外部から把握することができる。
【0028】
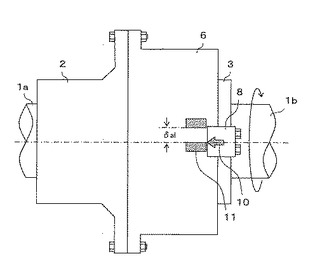
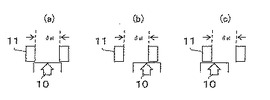
以上、主として、一方向のみの回転が与えられる歯車形軸継手について説明したが、本発明に係る歯車形軸継手の使用限界判定方法は、これに限定されることなく、正逆両方向への回転が想定される歯車形軸継手についても適用することができる。この場合、例えば、図6に示すように、初期設定の段階で、許容範囲を一方向だけでなく、逆方向にも設定すればよい。
【0029】
図6には、正逆両方向への回転が想定される歯車形軸継手の場合の使用限界判定方法による反射体の位置関係を示す図であり、(a)は初期状態を示し、(b)および(c)は一定期間使用後の状態を示している。なお、(b)は、正方向(図面右方向)への回転時に把握される反射体の位置関係を示し、(c)は、逆方向(図面左方向)への回転時に把握される反射体の位置関係を示している。
【0030】
図6に示す歯車形軸継手の使用限界判定方法においては、例えば、図6(a)に示すように、基準位置の第2反射体(矢印)10に対して、正方向(図面右方向)の許容範囲と、逆方向(図面左方向)の許容範囲を設定し、その範囲となるように第1反射体11を貼り付ける。そして、一定期間使用された後、第1反射体11および第2反射体10は、正方向(図面右方向)への回転時には図6(b)に示されるような位置関係となり、逆方向(図面左方向)への回転時には図6(c)に示されるような位置関係となることが観測される。そして、正逆それぞれの方向への回転時における歯車の摩耗量が許容範囲にあるか否かを確認することができる。
【0031】
以上の説明では、第1反射体11として許容範囲を示す反射シールを貼り、第2反射体10として基準位置を示す反射シールを貼り付けた例を挙げたが、これとは逆、つまり、第1反射体11として基準位置を示す反射シールを貼り、第2反射体10として許容範囲を示す反射シールを貼り付けてもよい。
【0032】
また、以上の説明では、基準位置を示すマーク(矢印)と、許容範囲を示すマーク(2つの矩形)とで、歯車の摩耗量を把握する方法について述べたが、歯車の相対的な位置関係を把握できるのであれば、制約はない。
【0033】
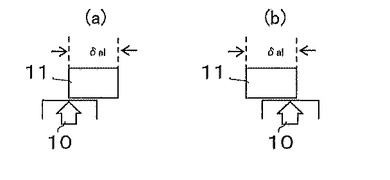
例えば、図7〜図9に示す反射体対を用いることができる。ここで、図7は、基準位置として矢印型の反射体を用い、許容範囲として一枚の矩形の反射体を用いた例を、図8は、基準位置として矢印型の反射体を用い、許容範囲として目盛り付きの反射体を用いた例を、図9は、双方に基準位置を示す三角型の反射体を用いた例の模式図を示している。いずれの例でも、主として正方向(図面右方向)に回転する歯車形軸継手を想定しており、(a)は初期状態、(b)は、一定期間使用した後、歯車に負荷がかかっている状態を示している。
【0034】
図7に示す例では、一定期間使用された後、基準位置を示す矢印型の反射体10が許容範囲を示す矩形反射体11が貼り付けられた範囲内にあるか否かで、歯車の摩耗量を把握することができる。図8に示す例では、一定期間使用された後、基準位置を示す矢印型の反射体10の移動距離を、目盛り付き反射体11で測定し、歯車の摩耗量を把握することができる。これにより、定量的な摩耗量の管理が可能となる。また、図9に示す例では、一定期間使用された後、基準位置を示す三角型反射体10、11の頂点同士の距離を測定し、歯車の摩耗量を把握することができる。なお、これら図7〜図9に示す例においても、外筒のマークと内筒のマークを入れ替えることができ、また、逆方向の許容範囲も設定することができるのは、前述の例と同様である。
【産業上の利用可能性】
【0035】
本発明によれば、簡易的な方法により、歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行うことができる。
【図面の簡単な説明】
【0036】
【図1】本発明で用いる反射体を設置した歯車形軸継手の一部を断面で表した側面図
【図2】本発明で用いる反射体を設置した歯車形軸継手の上面図
【図3】未使用の歯車形軸継手における外歯車及び内歯車の位置関係を示す模式図 (a)歯車の噛み合わせ状況を示す拡大図 (b)第1反射体および第2反射体の位置関係を示す図
【図4】一定期間使用した歯車形軸継手における、負荷を与えていない状態での外歯車及び内歯車の位置関係を示す模式図 (a)歯車の噛み合わせ状況を示す拡大図 (b)第1反射体および第2反射体の位置関係を示す図
【図5】一定期間使用した歯車形軸継手における、負荷を与えている状態での外歯車及び内歯車の位置関係を示す模式図 (a)歯車の噛み合わせ状況を示す拡大図 (b)第1反射体および第2反射体の位置関係を示す図
【図6】正逆両方向への回転が想定される歯車形軸継手の場合の使用限界判定方法による反射体の位置関係を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用後、正方向(図面右方向)への回転時に把握される反射体の位置関係 (c)一定期間使用後、逆方向(図面左方向)への回転時に把握される反射体の位置関係
【図7】基準位置として矢印型の反射体を用い、許容範囲として一枚の矩形の反射体を用いた例を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用した後、歯車に負荷がかかっている状態における反射体の位置関係
【図8】基準位置として矢印型の反射体を用い、許容範囲として目盛り付きの反射体を用いた例を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用した後、歯車に負荷がかかっている状態における反射体の位置関係
【図9】双方に基準位置を示す三角型の反射体を用いた例を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用した後、歯車に負荷がかかっている状態における反射体の位置関係
【符号の説明】
【0037】
1a 負荷側軸
1b 駆動側軸
2 固定フランジ
3 内筒
4 外歯車
5 内歯車
6 外筒
7 ボルト、ナット
8 金物(ガイド)
9 ボルト
10 第2反射体
11 第1反射体
12 発光装置
P.C ピッチ円
δal バックラッシのズレ量の許容範囲
δbl バックラッシのズレ量
【技術分野】
【0001】
本発明は、歯車形軸継手(ギヤカップリング)を稼動中に開放せずに内部の歯車の使用限界を判定する方法に関するものである。
【背景技術】
【0002】
従来、歯車形軸継手を開放せずに歯車形軸継手の内部歯車の使用限界を判定することについては、種々提案されている。
【0003】
例えば、特許文献1には、歯車継手部の歯車摩耗量を、歯車の正転逆転時のバックラッシの動きにより検出する装置において、歯車継手部外筒内筒のいずれか一方にペン書き装置を他方に記録紙を設置し、前記歯車継手部のバックラッシの相対的なずれ量を検出し、ずれ量をペン書き装置で記録紙に記録するようにした、歯車継手部の歯車の摩耗量を検出する装置に関する発明が提案されている。
【0004】
また、特許文献2には、歯車形軸継手の駆動側と負荷側の各々に1回転で1パルス検出するパルス検出器を設け、正転時の駆動側パルスと負荷側パルスの検出時間間隔と、逆転時の同時間間隔の差から駆動側、負荷側のギヤ間のバックラッシを測定して、歯車(ギヤ)の摩耗量を検出する歯車形軸継手における歯車摩耗量検出方法の発明が提案されている。
【0005】
【特許文献1】特開平5−280905号公報
【特許文献2】特公昭59−41136号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
特許文献1で提案されている歯車形軸継手における使用限界の検出方法では、バックラッシのずれ量の検出確認を、稼動中の設備を停止させ記録紙を回収して行う必要があり、稼働率の低下等、実用上問題があった。
【0007】
特許文献2で提案されている歯車形軸継手における使用限界の検出方法では、パルスの発信器および検出器を設ける必要があり、また、正転逆転しなければ、摩耗量の推定ができないため、操業中同一方向に回転する機械では、一時的に操業を中止して行わざるをえず、操業中に検出を行えるものではなかった。
【0008】
本発明は、上記のような問題点を解決するために発明したもので、稼動中の設備における歯車の摩耗量の検出が可能であり、歯車形軸継手を開放することなく、歯車形軸継手の使用限界を判定する方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、下記の(1)〜(3)に示す歯車形軸継手の使用限界判定方法を要旨とする。
【0010】
(1)内歯車を有する外筒と、外歯車を有する内筒とを備える歯車形軸継手の使用限界判定方法であって、外筒に連動して回転する第1反射体、および、内筒に連動して回転する第2反射体を設置し、駆動側軸の回転数と同調して発光させた光を第1反射体および第2反射体に照射し、反射光から把握される第1反射体および第2反射体の相対的な位置関係により歯車の摩耗量を検知する歯車形軸継手の使用限界判定方法。
【0011】
(2)第1反射体および第2反射体が、隣り合う位置で回転するように設けられている上記(1)の歯車形軸継手の使用限界判定方法。
【0012】
(3)第1反射体および第2反射体のいずれか一方が、基準位置を示し、他方が歯車の摩耗量の許容範囲を示す上記(1)または(2)の歯車形軸継手の使用限界判定方法。
【発明の効果】
【0013】
本発明によれば、簡易的な方法により、歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行うことができる。
【発明を実施するための最良の形態】
【0014】
以下、図を使って、本発明に係る歯車形軸継手の使用限界判定方法の例を説明する。
【0015】
図1は、本発明で用いる反射体を設置した歯車形軸継手の一部を断面で表した側面図を示しており、図2は、同歯車形軸継手の上面図を示している。
【0016】
図1および図2に示すように、本発明の対象である歯車形軸継手は、内歯車5を有する外筒6と、外歯車4を有する内筒3とを備え、例えば、内筒3が駆動側軸1bに接続されており、駆動側軸1bに連動して回転し、内筒3の回転は、その外歯車4と噛み合う内歯車5に伝えられ、外筒6が内筒3に連動して回転することにより、負荷側軸1aが回転する仕組みを有する継手である。ここで、負荷側軸1aは、固定フランジ2と接続され、固定フランジ2と外筒6とは、ボルト、ナット7を介して連結されている。
【0017】
本発明に係る歯車形軸継手の使用限界判定方法においては、外筒6に連動して回転する第1反射体11と、内筒3に連動して回転する第2反射体10を設置し、さらに、第1反射体11および第2反射体10に光を照射することができるストロボ発光装置などの発光装置12を設置する。そして、発光装置12は、駆動側軸1bの回転数と同調して光を発光し、その光を第1反射体11および第2反射体10に照射する。これにより、反射光だけに着目すれば、駆動側軸1bの回転を見かけ上停止させることができる。そして、本発明に係る歯車形軸継手の使用限界判定方法は、その発光周期毎に観測される反射光を、例えばカメラ(このカメラも駆動側軸1bの回転数と同調して撮影するのがよい。)で撮影し、そこから把握される第1反射体11および第2反射体10の相対的な位置関係をモニターすることにより、歯車の摩耗量を検知するものである。
【0018】
すなわち、歯車形軸継手が使用されることにより、内筒3の外歯車4および外筒6の内歯車5の接触面が摩耗し、バックラッシにずれが生じてくると、第1反射体11および第2反射体10の相対的な位置関係が変化する。本発明に係る歯車形軸継手の使用限界判定方法においては、上記のように、第1反射体11および第2反射体10の相対的な位置関係を外部から把握することができるので、歯車形軸継手を開放することなく、稼動中の歯車の摩耗量の検出をすることができる。また、画像処理技術を利用すれば、このストロボ発光により見かけ上停止させた反射シールの変位量を常時監視することも可能である。
【0019】
ここで、第1反射体11および第2反射体10の設置位置については、外部から認識できる位置であればよいが、例えば、図1および図2に示すように、これらの反射体同士は、隣り合う位置で回転するように設けられていることが望ましい。このような構成とすれば、第1反射体11および第2反射体10の相対的な位置関係を把握しやすくなる。また、第1反射体11および第2反射体10が相互に離れた位置に設置されていると、一つのストロボ発光器およびカメラだけでは相対的な位置関係を把握するのが困難となるが、反射体同士が隣り合う位置で回転するように設けられておれば、このような問題がない。
【0020】
このとき、例えば、図1および図2に示すように、内筒3にボルト9で固定された金物(ガイド)8上に第2反射体10を貼り付け、外筒6に第1反射体11を貼り付けることにより、第1反射体11および第2反射体10をそれぞれに隣接する位置に設けることができる。
【0021】
本発明に係る歯車形軸継手の使用限界判定方法においては、第1反射体および第2反射体のいずれか一方が、基準位置を示し、他方が歯車の摩耗量の許容範囲を示すような構成とすることにより、歯車形軸継手の使用限界をより把握しやすくなる。即ち、例えば、図2に示すように、第1反射体11として2枚の矩形反射シール(図2の11)を用意し、第2反射体10として、矢印形の反射シール(図2の10)を用意する。このとき、矢印形の反射シールが基準位置を示し、2枚の矩形反射シールに挟まれたエリアが歯車の摩耗量の許容範囲を示している。この使用限界判定方法においては、矢印形の反射シールの先端が2枚の矩形反射シールに挟まれたエリアから外れると、歯車の摩耗量が許容値を超えたことを意味する。
【0022】
以下、図3〜図5を用いて、本発明に係る歯車形軸継手の使用限界判定方法の原理を詳しく説明する。
【0023】
図3は、未使用の歯車形軸継手における外歯車及び内歯車の位置関係を示す模式図であり、図4および図5はいずれも、一定期間使用した歯車形軸継手における外歯車及び内歯車の位置関係を示す模式図である。図4は、負荷を与えていない状態、図5は、負荷を与えている状態での位置関係を示し、図3〜図5のいずれにおいても、(a)は歯車の噛み合わせ状況を示す拡大図、(b)は第1反射体および第2反射体の位置関係を示す図である。
【0024】
なお、実際の歯車形軸継手では、外歯車、内歯車ともに湾曲しているが、図3〜図5では、歯車形軸継手のピッチ円を直線で表している。また、実際の歯車形軸継手では、外歯車、内歯車ともに、その山部がR形状であり、また、若干のバックラッシがあるが、図3〜図5ではこれらを省略している。さらに、歯車形軸継手には、正方向および逆方向のいずれにも回転させる方式のものがあるが、図3〜図5では、基本的に正方向にしか回転させず、歯車の山の一面のみが摩耗する方式のものを示している。
【0025】
図3(a)に示すように、歯車形軸継手における外歯車4及び内歯車5は、未使用の初期状態においては、決められたバックラッシがあるものの、ほとんど隙間がなく噛み合わされた状態である。このとき、バックラッシのズレ量の許容範囲をδalとし、第1反射体11および第2反射体10を、例えば、図3(b)に示すように設置するものとする。そして、歯車形軸継手の使用を重ねることによって、外歯車4、内歯車5とも、その接触面が摩耗し、図4(a)のような状態となったとする。このときのバックラッシのズレ量をδblとする。図4(b)に示すように、この歯車形軸継手に負荷を与えなければ、第1反射体11および第2反射体10の位置関係は、図3(b)に示す初期状態と変わらない。即ち、この状態では、バックラッシのズレ量を把握することができない。
【0026】
しかし、図5(a)に示すように、この歯車形軸継手に負荷を与えた場合、内筒の外歯車4および外筒の内歯車5それぞれの摩耗量に応じて、バックラッシが初期値からずれることになる。このとき、図5(b)に示すように、第2反射体10の矢印の位置が図面右方向に移動する。図5に示す例の場合、このバックラッシのズレ量δblがバックラッシのズレ量の許容範囲δalと同等であり、歯車形軸継手の交換時期が近づいていることが分かる。
【0027】
このように、本発明に係る歯車形軸継手の使用限界判定方法においては、それぞれ外筒6および内筒3に連動して回転する第1反射体11および第2反射体10の相対的な位置関係を外部から把握することができる。
【0028】
以上、主として、一方向のみの回転が与えられる歯車形軸継手について説明したが、本発明に係る歯車形軸継手の使用限界判定方法は、これに限定されることなく、正逆両方向への回転が想定される歯車形軸継手についても適用することができる。この場合、例えば、図6に示すように、初期設定の段階で、許容範囲を一方向だけでなく、逆方向にも設定すればよい。
【0029】
図6には、正逆両方向への回転が想定される歯車形軸継手の場合の使用限界判定方法による反射体の位置関係を示す図であり、(a)は初期状態を示し、(b)および(c)は一定期間使用後の状態を示している。なお、(b)は、正方向(図面右方向)への回転時に把握される反射体の位置関係を示し、(c)は、逆方向(図面左方向)への回転時に把握される反射体の位置関係を示している。
【0030】
図6に示す歯車形軸継手の使用限界判定方法においては、例えば、図6(a)に示すように、基準位置の第2反射体(矢印)10に対して、正方向(図面右方向)の許容範囲と、逆方向(図面左方向)の許容範囲を設定し、その範囲となるように第1反射体11を貼り付ける。そして、一定期間使用された後、第1反射体11および第2反射体10は、正方向(図面右方向)への回転時には図6(b)に示されるような位置関係となり、逆方向(図面左方向)への回転時には図6(c)に示されるような位置関係となることが観測される。そして、正逆それぞれの方向への回転時における歯車の摩耗量が許容範囲にあるか否かを確認することができる。
【0031】
以上の説明では、第1反射体11として許容範囲を示す反射シールを貼り、第2反射体10として基準位置を示す反射シールを貼り付けた例を挙げたが、これとは逆、つまり、第1反射体11として基準位置を示す反射シールを貼り、第2反射体10として許容範囲を示す反射シールを貼り付けてもよい。
【0032】
また、以上の説明では、基準位置を示すマーク(矢印)と、許容範囲を示すマーク(2つの矩形)とで、歯車の摩耗量を把握する方法について述べたが、歯車の相対的な位置関係を把握できるのであれば、制約はない。
【0033】
例えば、図7〜図9に示す反射体対を用いることができる。ここで、図7は、基準位置として矢印型の反射体を用い、許容範囲として一枚の矩形の反射体を用いた例を、図8は、基準位置として矢印型の反射体を用い、許容範囲として目盛り付きの反射体を用いた例を、図9は、双方に基準位置を示す三角型の反射体を用いた例の模式図を示している。いずれの例でも、主として正方向(図面右方向)に回転する歯車形軸継手を想定しており、(a)は初期状態、(b)は、一定期間使用した後、歯車に負荷がかかっている状態を示している。
【0034】
図7に示す例では、一定期間使用された後、基準位置を示す矢印型の反射体10が許容範囲を示す矩形反射体11が貼り付けられた範囲内にあるか否かで、歯車の摩耗量を把握することができる。図8に示す例では、一定期間使用された後、基準位置を示す矢印型の反射体10の移動距離を、目盛り付き反射体11で測定し、歯車の摩耗量を把握することができる。これにより、定量的な摩耗量の管理が可能となる。また、図9に示す例では、一定期間使用された後、基準位置を示す三角型反射体10、11の頂点同士の距離を測定し、歯車の摩耗量を把握することができる。なお、これら図7〜図9に示す例においても、外筒のマークと内筒のマークを入れ替えることができ、また、逆方向の許容範囲も設定することができるのは、前述の例と同様である。
【産業上の利用可能性】
【0035】
本発明によれば、簡易的な方法により、歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行うことができる。
【図面の簡単な説明】
【0036】
【図1】本発明で用いる反射体を設置した歯車形軸継手の一部を断面で表した側面図
【図2】本発明で用いる反射体を設置した歯車形軸継手の上面図
【図3】未使用の歯車形軸継手における外歯車及び内歯車の位置関係を示す模式図 (a)歯車の噛み合わせ状況を示す拡大図 (b)第1反射体および第2反射体の位置関係を示す図
【図4】一定期間使用した歯車形軸継手における、負荷を与えていない状態での外歯車及び内歯車の位置関係を示す模式図 (a)歯車の噛み合わせ状況を示す拡大図 (b)第1反射体および第2反射体の位置関係を示す図
【図5】一定期間使用した歯車形軸継手における、負荷を与えている状態での外歯車及び内歯車の位置関係を示す模式図 (a)歯車の噛み合わせ状況を示す拡大図 (b)第1反射体および第2反射体の位置関係を示す図
【図6】正逆両方向への回転が想定される歯車形軸継手の場合の使用限界判定方法による反射体の位置関係を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用後、正方向(図面右方向)への回転時に把握される反射体の位置関係 (c)一定期間使用後、逆方向(図面左方向)への回転時に把握される反射体の位置関係
【図7】基準位置として矢印型の反射体を用い、許容範囲として一枚の矩形の反射体を用いた例を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用した後、歯車に負荷がかかっている状態における反射体の位置関係
【図8】基準位置として矢印型の反射体を用い、許容範囲として目盛り付きの反射体を用いた例を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用した後、歯車に負荷がかかっている状態における反射体の位置関係
【図9】双方に基準位置を示す三角型の反射体を用いた例を示す図 (a)初期状態における反射体の位置関係 (b)一定期間使用した後、歯車に負荷がかかっている状態における反射体の位置関係
【符号の説明】
【0037】
1a 負荷側軸
1b 駆動側軸
2 固定フランジ
3 内筒
4 外歯車
5 内歯車
6 外筒
7 ボルト、ナット
8 金物(ガイド)
9 ボルト
10 第2反射体
11 第1反射体
12 発光装置
P.C ピッチ円
δal バックラッシのズレ量の許容範囲
δbl バックラッシのズレ量
【特許請求の範囲】
【請求項1】
内歯車を有する外筒と、外歯車を有する内筒とを備える歯車形軸継手の使用限界判定方法であって、外筒に連動して回転する第1反射体、および、内筒に連動して回転する第2反射体を設置し、駆動側軸の回転数と同調して発光させた光を第1反射体および第2反射体に照射し、反射光から把握される第1反射体および第2反射体の相対的な位置関係により歯車の摩耗量を検知することを特徴とする歯車形軸継手の使用限界判定方法。
【請求項2】
第1反射体および第2反射体が、隣り合う位置で回転するように設けられていることを特徴とする請求項1に記載の歯車形軸継手の使用限界判定方法。
【請求項3】
第1反射体および第2反射体のいずれか一方が、基準位置を示し、他方が歯車の摩耗量の許容範囲を示すことを特徴とする請求項1または2に記載の歯車形軸継手の使用限界判定方法。
【請求項1】
内歯車を有する外筒と、外歯車を有する内筒とを備える歯車形軸継手の使用限界判定方法であって、外筒に連動して回転する第1反射体、および、内筒に連動して回転する第2反射体を設置し、駆動側軸の回転数と同調して発光させた光を第1反射体および第2反射体に照射し、反射光から把握される第1反射体および第2反射体の相対的な位置関係により歯車の摩耗量を検知することを特徴とする歯車形軸継手の使用限界判定方法。
【請求項2】
第1反射体および第2反射体が、隣り合う位置で回転するように設けられていることを特徴とする請求項1に記載の歯車形軸継手の使用限界判定方法。
【請求項3】
第1反射体および第2反射体のいずれか一方が、基準位置を示し、他方が歯車の摩耗量の許容範囲を示すことを特徴とする請求項1または2に記載の歯車形軸継手の使用限界判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−54258(P2010−54258A)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願番号】特願2008−217546(P2008−217546)
【出願日】平成20年8月27日(2008.8.27)
【出願人】(000002118)住友金属工業株式会社 (2,544)
【Fターム(参考)】
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願日】平成20年8月27日(2008.8.27)
【出願人】(000002118)住友金属工業株式会社 (2,544)
【Fターム(参考)】
[ Back to top ]