
死角車両検出レーダーシステム
【課題】送信波の平均電力が高く、回折波の微弱な信号のS/N比を改善することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させることができる死角車両検出レーダーシステムを得る。
【解決手段】送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段(1−7、1’−7’)と、周波数差に基づく回折波の強度差により死角車両を検出する死角車両検出部8とを備える。
【解決手段】送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段(1−7、1’−7’)と、周波数差に基づく回折波の強度差により死角車両を検出する死角車両検出部8とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、信号機のない交差点において、死角から進入する車両を検出する死角車両検出レーダーシステムに関するものである。
【背景技術】
【0002】
信号機のない交差点においては、死角から進入する車両との出会いがしらの衝突事故が多数発生しており、この死角車両を検出する手段の実現が要求されている。従来技術に、回折損の異なる複数の周波数のマイクロ波パルス信号を同時に送信し、車両等目標物からの反射波を受信し、信号強度の差分から見通し外車両を検知するレーダーシステムがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−301649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来のレーダーシステムは、マイクロ波パルス信号を送信するパルス方式であるため、送信波の平均電力が低く、微弱な回折波を検出できず死角車両を見逃す問題があった。一方で、S/N比を改善するためにパルス幅を広げると、距離精度が悪くなり、死角車両の距離を誤検出する問題があった。
【0005】
本発明は上述した課題を解決するためになされたもので、送信波の平均電力が高く、回折波の微弱な信号のS/N比を改善することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させることができる死角車両検出レーダーシステムを得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る死角車両検出レーダーシステムは、送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段と、周波数差に基づく回折波の強度差により死角車両を検出する検出手段とを備えたものである。
【発明の効果】
【0007】
本発明によれば、FMCW方式であるため送信波の平均電力が高く、また、FMCW方式の信号処理による利得があることから、回折波の微弱な信号のS/N比を改善することができる。これにより、従来技術では見逃していた信号を検出することができ、さらに、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させる効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態に係る死角車両検出レーダーシステムを示すブロック図である。
【図2】本発明における、(a)FMCW信号の送信信号と受信信号、(b)ミキサが取り出すビート周波数信号の波形図である。
【図3】本発明における、信号処理器が解析した距離周波数成分のスペクトルの波形図である。
【図4】本発明における、信号処理器が解析したドプラ周波数成分のスペクトルの波形図である。
【発明を実施するための形態】
【0009】
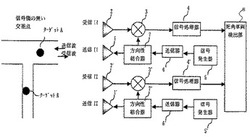
以下、本発明の実施の形態を添付図面に基づいて詳述する。図1は、本発明の実施の形態に係る死角車両検出レーダーシステムを示すブロック図である。図1に示す死角車両検出レーダーシステムは、送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式(連続波周波数変調方式)に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する後述する構成の送受信手段と、周波数差に基づく回折波の強度差により死角車両を検出する検出手段としての死角車両検出部8を備えている。
【0010】
すなわち、図1に示すように、送受信手段は、搭載車両の前方に設置された送信アンテナ1、受信アンテナ2と、FMCW信号を発生する信号発生器5と、このFMCW信号を増幅して送信アンテナ1へ出力する送信器6と、この送信器6の出力信号の一部を分岐する方向性結合器7と、方向性結合器7からの信号と受信アンテナ2を経由してきた信号とのビート周波数信号を取り出すミキサ3と、このビート周波数信号を解析して障害物を検知する信号処理器4とから構成されている。方向性結合器7は、送信器6の出力信号の一部を分岐して送信アンテナ1、受信アンテナ2経由でミキサ3に送信するための分岐手段である。
【0011】
また、回折損の異なる複数の周波数のマイクロ波信号を同時に送信し、車両等目標物からの反射波を受信するために、搭載車両の前方に設置された送信アンテナ1’、受信アンテナ2’と、FMCW信号を発生する信号発生器5,と、このFMCW信号を増幅して送信アンテナ1’へ出力する送信器6’と、この送信器6’の出力信号のr一部を分岐する方向性結合器7’と、方向性結合器7’からの信号と受信アンテナ2’を経由してきた信号とのビート周波数信号を取り出すミキサ3’と、このビート周波数信号を解析して障害物を検知する信号処理器4’についても構成に含まれている。方向性結合器7’は、送信器6’の出力信号の一部を分岐して送信アンテナ1’、受信アンテナ2’経由でミキサ3’に送信するための分岐手段である。
【0012】
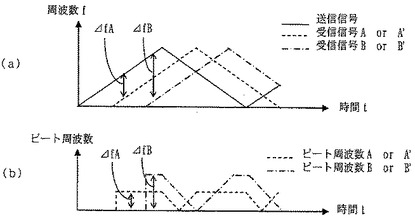
次に、図1に示す構成でなる死角車両検出レーダーシステムの動作について説明する。信号発生器5からは、図2(a)に示した三角波のFMCW信号が発生され、送信器6に出力される。送信器6では、このFMCW信号を増幅して出力する。このFMCW信号は、周波数が直線的に増加したのち減少することを繰り返す。この出力信号は、方向性結合器7を介して送信アンテナ1に入射される。方向性結合器7では、出力信号の一部を分岐して、送信アンテナ1、受信アンテナ2を介してミキサ3に伝送する。
【0013】
また、同様に、信号発生器5’からは、図2(a)に示した三角波のFMCW信号が発生され、送信器6’に出力される。送信器6’では、このFMCW信号を増幅して出力する。このFMCW信号は、周波数が直線的に増加したのち減少することを繰り返す。この出力信号は、方向性結合器7’を介して送信アンテナ1’に入射される。方向性結合器7’では、出力信号の一部を分岐して、送信アンテナ1’、受信アンテナ2’を介してミキサ3’に伝送する。
【0014】
送信アンテナ1に入射された信号は、搭載車両の前方から順次電波として放射される。この電波は、ターゲットの車両等で反射され、送信アンテナ1に対向する受信アンテナ2から入射する。受信アンテナ2から入射した信号はミキサ3に入射する。ミキサ3には、ターゲットの車両等までの距離を伝搬する時間をずらした信号が入射されることになる。ターゲットの車両等はそれぞれ距離が異なる。ここでは、代表的に、図1に示した2箇所のターゲットA、ターゲットBで説明すると、ターゲットA、ターゲットBまでの距離を伝搬してミキサ3に入射される各受信信号がそれぞれの遅延時間を有する。従って、ミキサ3に入射するターゲットAの周波数の変化は、図2(a)に示すように、時間的にずれを生じる。ここで、ターゲットAと比較して、遠方に位置するターゲットBから入射される受信信号の周波数変化は、ターゲットAより大きな時間的ずれを生じる。
【0015】
また、同様に、送信アンテナ1’に入射された信号は、搭載車両の前方から順次電波として放射される。この電波は、ターゲットの車両等で反射され、送信アンテナ1’に対向する受信アンテナ2’から入射する。受信アンテナ2’から入射した信号はミキサ3’に入射する。ミキサ3’には、ターゲットの車両等までの距離を伝搬する時間をずらした信号が入射されることになる。ターゲットの車両等はそれぞれ距離が異なる。ここでは、代表的に、図1に示した2箇所のターゲットA、ターゲットBで説明すると、ターゲットA、ターゲットBまでの距離を伝搬してミキサ3に入射される各受信信号がそれぞれの遅延時間を有する。従って、ミキサ3に入射するターゲットAの周波数の変化は、図2(a)に示すように、時間的にずれを生じる。ここで、ターゲットAと比較して、遠方に位置するターゲットBから入射される受信信号の周波数変化は、ターゲットAより大きな時間的ずれを生じる。
【0016】
ミキサ3では、送信器出力信号を基準とし、受信信号とのビート周波数信号を取り出す。送信信号及び各受信信号A,Bの周波数が三角波状に変化し、それぞれに時間的ずれがあるので、その時間的ずれに応じた周波数の差が生じる。送信信号と各受信信号A,Bとのビート周波数信号は、図2(b)に示すようにそれぞれパルス状にあらわれるものとなる。ここで、ΔfAは受信信号A点、ΔfBは受信信号B点に対応するビート周波数信号である。
【0017】
また、同様に、ミキサ3’では、送信器出力信号を基準とし、受信信号とのビート周波数信号を取り出す。送信信号及び各受信信号A’,B’の周波数が三角波状に変化し、それぞれに時間的ずれがあるので、その時間的ずれに応じた周波数の差が生じる。送信信号と各受信信号A’,B’とのビート周波数信号は、図2(b)に示すようにそれぞれパルス状にあらわれるものとなる。ここで、ΔfA’は受信信号A’、ΔfB’は受信信号B,に対応するビート周波数信号である。
【0018】
図2(b)において、各パルスに着目すると、遠方にあるターゲットBに対応するビート周波数信号ΔfBが、近傍にあるターゲットAに対応するビート周波数信号ΔfAより周波数が高い。つまり、高い周波数は遠方に、低い周波数は近傍に対応する。
【0019】
また、同様に、図2(b)において、各パルスに着目すると、遠方にあるターゲットBに対応するビート周波数信号ΔfB’が、近傍にあるターゲットAに対応するビート周波数信号ΔfA’より周波数が高い。つまり、高い周波数は遠方に、低い周波数は近傍に対応する。
【0020】
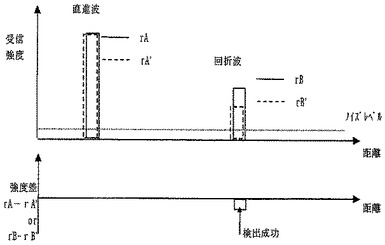
ビート周波数信号ΔfA、ΔfBは、信号処理器4に入力され、FFT等のフーリエ変換処理にて距離方向の信号rA、rBに変換後に、死角車両検出部8に入力される。
また、同様に、ビート周波数信号ΔfA’、ΔfB’は、信号処理器4’に入力され、FFT等のフーリエ変換処理にて距離方向の信号、rA’、rB’に変換後に、死角車両検出部8に入力される。死角車両検出部8では、図3に示すとおり、距離方向の信号rA、rB、rA’およびrB’を比較することで、各信号が回折波か、あるいは、直進波かを判別する。ここでは、ターゲットAを見通しのある車両、ターゲットBを死角車両としている。
【0021】
反射波の信号強度は周波数差の影響が小さいが、回折波のみの場合は周波数差が大きく影響する。また、回折波は死角車両からのみ受信され、見通し内の車両からは発生しない。よって、大きく乖離している複数周波数の同一距離の信号強度を比較することで、その比較差が所定値以上か否かにより、ターゲットが死角車両か、あるいは見通し内車両であるのかを判断できる。図3に示すとおり、FFT等のFMCW処理に伴い、S/Nが改善された微弱な受信信号からも死角車両が検出される。
【0022】
ターゲットBが移動速度を持つ場合、図4(a)に示した受信信号Bには、送信信号と受信信号の時間的ずれによる周波数差(以下、距離周波数成分と称す)frと、障害物の移動速度による周波数差(以下、ドプラ周波数成分と称す)fvが含まれる。
【0023】
送信信号のFMCW信号が直線的に上昇する区間(以下、上り区間と称す)と、一方、FMCW信号が直線的に下降する区間(以下、下り区間と称す)では、ドプラ周波数成分の符号が逆向きに重畳される。
【0024】
図4(b)に示すように、FMCW信号の三角波の上り区間のビート周波数をfu,下り区間のビート周波数をfdとし、障害物の距離周波数成分fr,ドプラ周波数成分fvとの関係を示すと、次に関係が得られる。
fu=fr−fv
fd=fr+fv *)自車両に近づく方向の速度を+とする
【0025】
FMCW信号の送信波の変調周波数をFM,f0を中心周波数とする変調幅を△f、光速をc、距離をR、移動速度をVとすると、
fr=((4*△f*FM)/c)*R
fv=(2*f0/c)*V
となり、距離Rと速度Vは検出されたfu,fdより求めることができる。すなわち、ドプラ周波数成分が重畳したスペクトラムを、上り区間と、下り区間で、その差分を求めることにより、その結果からドプラ周波数成分のみを抽出することができる。また、求められた速度Vから、死角車両であるターゲットBが、信号機の無い交差点に近づいているか、遠ざかっているかを検出することができる。
【0026】
したがって、上記実施の形態によれば、FMCW方式を用いているため送信波の平均電力が高く、また、FMCW方式の信号処理による利得があることから、回折波の微弱な信号のS/N比を改善することができる。これにより、従来技術では見逃していた信号を検出することができ、さらに、死角車両の距離誤差を低減することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させる効果がある。また、FMCW方式によるS/N比の改善と距離誤差の低減により、対向車両の死角にあるバイク等の小型車両も検出することができる。
【0027】
なお、上記実施の形態は、FMCW方式に基づく送受信手段を用いたものであるが、FMCW方式の代わりに、スペクトラム拡散方式を用いることもでき、FMCW方式と同様にS/N比の改善と距離誤差を低減することができる。
【符号の説明】
【0028】
1,1’ 送信アンテナ、2,2’ 受信アンテナ、3,3’ ミキサ、4,4’ 信号処理器、5,5’ 信号発生器(FMCW信号)、6,6’ 送信器、7,7’ 方向性結合器、8 死角車両検出部。
【技術分野】
【0001】
本発明は、信号機のない交差点において、死角から進入する車両を検出する死角車両検出レーダーシステムに関するものである。
【背景技術】
【0002】
信号機のない交差点においては、死角から進入する車両との出会いがしらの衝突事故が多数発生しており、この死角車両を検出する手段の実現が要求されている。従来技術に、回折損の異なる複数の周波数のマイクロ波パルス信号を同時に送信し、車両等目標物からの反射波を受信し、信号強度の差分から見通し外車両を検知するレーダーシステムがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−301649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来のレーダーシステムは、マイクロ波パルス信号を送信するパルス方式であるため、送信波の平均電力が低く、微弱な回折波を検出できず死角車両を見逃す問題があった。一方で、S/N比を改善するためにパルス幅を広げると、距離精度が悪くなり、死角車両の距離を誤検出する問題があった。
【0005】
本発明は上述した課題を解決するためになされたもので、送信波の平均電力が高く、回折波の微弱な信号のS/N比を改善することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させることができる死角車両検出レーダーシステムを得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る死角車両検出レーダーシステムは、送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段と、周波数差に基づく回折波の強度差により死角車両を検出する検出手段とを備えたものである。
【発明の効果】
【0007】
本発明によれば、FMCW方式であるため送信波の平均電力が高く、また、FMCW方式の信号処理による利得があることから、回折波の微弱な信号のS/N比を改善することができる。これにより、従来技術では見逃していた信号を検出することができ、さらに、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させる効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態に係る死角車両検出レーダーシステムを示すブロック図である。
【図2】本発明における、(a)FMCW信号の送信信号と受信信号、(b)ミキサが取り出すビート周波数信号の波形図である。
【図3】本発明における、信号処理器が解析した距離周波数成分のスペクトルの波形図である。
【図4】本発明における、信号処理器が解析したドプラ周波数成分のスペクトルの波形図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を添付図面に基づいて詳述する。図1は、本発明の実施の形態に係る死角車両検出レーダーシステムを示すブロック図である。図1に示す死角車両検出レーダーシステムは、送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式(連続波周波数変調方式)に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する後述する構成の送受信手段と、周波数差に基づく回折波の強度差により死角車両を検出する検出手段としての死角車両検出部8を備えている。
【0010】
すなわち、図1に示すように、送受信手段は、搭載車両の前方に設置された送信アンテナ1、受信アンテナ2と、FMCW信号を発生する信号発生器5と、このFMCW信号を増幅して送信アンテナ1へ出力する送信器6と、この送信器6の出力信号の一部を分岐する方向性結合器7と、方向性結合器7からの信号と受信アンテナ2を経由してきた信号とのビート周波数信号を取り出すミキサ3と、このビート周波数信号を解析して障害物を検知する信号処理器4とから構成されている。方向性結合器7は、送信器6の出力信号の一部を分岐して送信アンテナ1、受信アンテナ2経由でミキサ3に送信するための分岐手段である。
【0011】
また、回折損の異なる複数の周波数のマイクロ波信号を同時に送信し、車両等目標物からの反射波を受信するために、搭載車両の前方に設置された送信アンテナ1’、受信アンテナ2’と、FMCW信号を発生する信号発生器5,と、このFMCW信号を増幅して送信アンテナ1’へ出力する送信器6’と、この送信器6’の出力信号のr一部を分岐する方向性結合器7’と、方向性結合器7’からの信号と受信アンテナ2’を経由してきた信号とのビート周波数信号を取り出すミキサ3’と、このビート周波数信号を解析して障害物を検知する信号処理器4’についても構成に含まれている。方向性結合器7’は、送信器6’の出力信号の一部を分岐して送信アンテナ1’、受信アンテナ2’経由でミキサ3’に送信するための分岐手段である。
【0012】
次に、図1に示す構成でなる死角車両検出レーダーシステムの動作について説明する。信号発生器5からは、図2(a)に示した三角波のFMCW信号が発生され、送信器6に出力される。送信器6では、このFMCW信号を増幅して出力する。このFMCW信号は、周波数が直線的に増加したのち減少することを繰り返す。この出力信号は、方向性結合器7を介して送信アンテナ1に入射される。方向性結合器7では、出力信号の一部を分岐して、送信アンテナ1、受信アンテナ2を介してミキサ3に伝送する。
【0013】
また、同様に、信号発生器5’からは、図2(a)に示した三角波のFMCW信号が発生され、送信器6’に出力される。送信器6’では、このFMCW信号を増幅して出力する。このFMCW信号は、周波数が直線的に増加したのち減少することを繰り返す。この出力信号は、方向性結合器7’を介して送信アンテナ1’に入射される。方向性結合器7’では、出力信号の一部を分岐して、送信アンテナ1’、受信アンテナ2’を介してミキサ3’に伝送する。
【0014】
送信アンテナ1に入射された信号は、搭載車両の前方から順次電波として放射される。この電波は、ターゲットの車両等で反射され、送信アンテナ1に対向する受信アンテナ2から入射する。受信アンテナ2から入射した信号はミキサ3に入射する。ミキサ3には、ターゲットの車両等までの距離を伝搬する時間をずらした信号が入射されることになる。ターゲットの車両等はそれぞれ距離が異なる。ここでは、代表的に、図1に示した2箇所のターゲットA、ターゲットBで説明すると、ターゲットA、ターゲットBまでの距離を伝搬してミキサ3に入射される各受信信号がそれぞれの遅延時間を有する。従って、ミキサ3に入射するターゲットAの周波数の変化は、図2(a)に示すように、時間的にずれを生じる。ここで、ターゲットAと比較して、遠方に位置するターゲットBから入射される受信信号の周波数変化は、ターゲットAより大きな時間的ずれを生じる。
【0015】
また、同様に、送信アンテナ1’に入射された信号は、搭載車両の前方から順次電波として放射される。この電波は、ターゲットの車両等で反射され、送信アンテナ1’に対向する受信アンテナ2’から入射する。受信アンテナ2’から入射した信号はミキサ3’に入射する。ミキサ3’には、ターゲットの車両等までの距離を伝搬する時間をずらした信号が入射されることになる。ターゲットの車両等はそれぞれ距離が異なる。ここでは、代表的に、図1に示した2箇所のターゲットA、ターゲットBで説明すると、ターゲットA、ターゲットBまでの距離を伝搬してミキサ3に入射される各受信信号がそれぞれの遅延時間を有する。従って、ミキサ3に入射するターゲットAの周波数の変化は、図2(a)に示すように、時間的にずれを生じる。ここで、ターゲットAと比較して、遠方に位置するターゲットBから入射される受信信号の周波数変化は、ターゲットAより大きな時間的ずれを生じる。
【0016】
ミキサ3では、送信器出力信号を基準とし、受信信号とのビート周波数信号を取り出す。送信信号及び各受信信号A,Bの周波数が三角波状に変化し、それぞれに時間的ずれがあるので、その時間的ずれに応じた周波数の差が生じる。送信信号と各受信信号A,Bとのビート周波数信号は、図2(b)に示すようにそれぞれパルス状にあらわれるものとなる。ここで、ΔfAは受信信号A点、ΔfBは受信信号B点に対応するビート周波数信号である。
【0017】
また、同様に、ミキサ3’では、送信器出力信号を基準とし、受信信号とのビート周波数信号を取り出す。送信信号及び各受信信号A’,B’の周波数が三角波状に変化し、それぞれに時間的ずれがあるので、その時間的ずれに応じた周波数の差が生じる。送信信号と各受信信号A’,B’とのビート周波数信号は、図2(b)に示すようにそれぞれパルス状にあらわれるものとなる。ここで、ΔfA’は受信信号A’、ΔfB’は受信信号B,に対応するビート周波数信号である。
【0018】
図2(b)において、各パルスに着目すると、遠方にあるターゲットBに対応するビート周波数信号ΔfBが、近傍にあるターゲットAに対応するビート周波数信号ΔfAより周波数が高い。つまり、高い周波数は遠方に、低い周波数は近傍に対応する。
【0019】
また、同様に、図2(b)において、各パルスに着目すると、遠方にあるターゲットBに対応するビート周波数信号ΔfB’が、近傍にあるターゲットAに対応するビート周波数信号ΔfA’より周波数が高い。つまり、高い周波数は遠方に、低い周波数は近傍に対応する。
【0020】
ビート周波数信号ΔfA、ΔfBは、信号処理器4に入力され、FFT等のフーリエ変換処理にて距離方向の信号rA、rBに変換後に、死角車両検出部8に入力される。
また、同様に、ビート周波数信号ΔfA’、ΔfB’は、信号処理器4’に入力され、FFT等のフーリエ変換処理にて距離方向の信号、rA’、rB’に変換後に、死角車両検出部8に入力される。死角車両検出部8では、図3に示すとおり、距離方向の信号rA、rB、rA’およびrB’を比較することで、各信号が回折波か、あるいは、直進波かを判別する。ここでは、ターゲットAを見通しのある車両、ターゲットBを死角車両としている。
【0021】
反射波の信号強度は周波数差の影響が小さいが、回折波のみの場合は周波数差が大きく影響する。また、回折波は死角車両からのみ受信され、見通し内の車両からは発生しない。よって、大きく乖離している複数周波数の同一距離の信号強度を比較することで、その比較差が所定値以上か否かにより、ターゲットが死角車両か、あるいは見通し内車両であるのかを判断できる。図3に示すとおり、FFT等のFMCW処理に伴い、S/Nが改善された微弱な受信信号からも死角車両が検出される。
【0022】
ターゲットBが移動速度を持つ場合、図4(a)に示した受信信号Bには、送信信号と受信信号の時間的ずれによる周波数差(以下、距離周波数成分と称す)frと、障害物の移動速度による周波数差(以下、ドプラ周波数成分と称す)fvが含まれる。
【0023】
送信信号のFMCW信号が直線的に上昇する区間(以下、上り区間と称す)と、一方、FMCW信号が直線的に下降する区間(以下、下り区間と称す)では、ドプラ周波数成分の符号が逆向きに重畳される。
【0024】
図4(b)に示すように、FMCW信号の三角波の上り区間のビート周波数をfu,下り区間のビート周波数をfdとし、障害物の距離周波数成分fr,ドプラ周波数成分fvとの関係を示すと、次に関係が得られる。
fu=fr−fv
fd=fr+fv *)自車両に近づく方向の速度を+とする
【0025】
FMCW信号の送信波の変調周波数をFM,f0を中心周波数とする変調幅を△f、光速をc、距離をR、移動速度をVとすると、
fr=((4*△f*FM)/c)*R
fv=(2*f0/c)*V
となり、距離Rと速度Vは検出されたfu,fdより求めることができる。すなわち、ドプラ周波数成分が重畳したスペクトラムを、上り区間と、下り区間で、その差分を求めることにより、その結果からドプラ周波数成分のみを抽出することができる。また、求められた速度Vから、死角車両であるターゲットBが、信号機の無い交差点に近づいているか、遠ざかっているかを検出することができる。
【0026】
したがって、上記実施の形態によれば、FMCW方式を用いているため送信波の平均電力が高く、また、FMCW方式の信号処理による利得があることから、回折波の微弱な信号のS/N比を改善することができる。これにより、従来技術では見逃していた信号を検出することができ、さらに、死角車両の距離誤差を低減することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させる効果がある。また、FMCW方式によるS/N比の改善と距離誤差の低減により、対向車両の死角にあるバイク等の小型車両も検出することができる。
【0027】
なお、上記実施の形態は、FMCW方式に基づく送受信手段を用いたものであるが、FMCW方式の代わりに、スペクトラム拡散方式を用いることもでき、FMCW方式と同様にS/N比の改善と距離誤差を低減することができる。
【符号の説明】
【0028】
1,1’ 送信アンテナ、2,2’ 受信アンテナ、3,3’ ミキサ、4,4’ 信号処理器、5,5’ 信号発生器(FMCW信号)、6,6’ 送信器、7,7’ 方向性結合器、8 死角車両検出部。
【特許請求の範囲】
【請求項1】
送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段と、
周波数差に基づく回折波の強度差により死角車両を検出する検出手段と
を備えた死角車両検出レーダーシステム。
【請求項2】
請求項1に記載の死角車両検出レーダーシステムにおいて、
前記検出手段は、複数周波数の同一距離の信号強度を比較することで、目標物が死角車両であるか見通し内車両であるかを判断する
ことを特徴とする死角車両検出レーダーシステム。
【請求項3】
請求項1または2に記載の死角車両検出レーダーシステムにおいて、
前記送受信手段は、前記FMCW方式の代わりに、スペクトラム拡散方式に基づくものである
ことを特徴とする死角車両検出レーダーシステム。
【請求項1】
送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段と、
周波数差に基づく回折波の強度差により死角車両を検出する検出手段と
を備えた死角車両検出レーダーシステム。
【請求項2】
請求項1に記載の死角車両検出レーダーシステムにおいて、
前記検出手段は、複数周波数の同一距離の信号強度を比較することで、目標物が死角車両であるか見通し内車両であるかを判断する
ことを特徴とする死角車両検出レーダーシステム。
【請求項3】
請求項1または2に記載の死角車両検出レーダーシステムにおいて、
前記送受信手段は、前記FMCW方式の代わりに、スペクトラム拡散方式に基づくものである
ことを特徴とする死角車両検出レーダーシステム。
【図1】



【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2012−2527(P2012−2527A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−134963(P2010−134963)
【出願日】平成22年6月14日(2010.6.14)
【出願人】(591036457)三菱電機エンジニアリング株式会社 (419)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月14日(2010.6.14)
【出願人】(591036457)三菱電機エンジニアリング株式会社 (419)
【Fターム(参考)】
[ Back to top ]