
残糸除去装置
【課題】ボビンの残糸を、ボビンの径によらず確実に除去する。
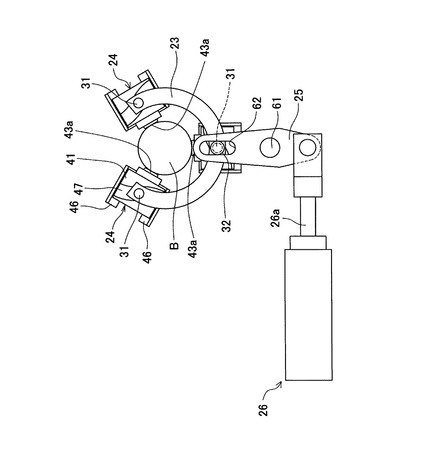
【解決手段】把持爪43をそれぞれ備えた3つの把持爪ユニット24が、ボビンBの周方向に沿って配置されている。把持爪ユニット24を形成するスライド部材41の上面には、ボビンの周方向に関する一方側(図の反時計回り方向側)にいくほど、ボビンBの径方向に関して内側に位置するように延びた案内溝47が形成されている。3つの把持爪ユニット24の案内溝47内には、それぞれ、略円柱形状の案内部材3が配置されており、これらの案内部材33は、ボビンBの周方向に回動可能な1つの回動部材23に取り付けられている。エアシリンダ26を駆動して、回動部材23をボビンBの周方向に回動させると、案内部材33が案内溝47に沿って移動することで、3つの把持爪ユニット24がそれぞれ、ボビンBの径方向に移動する。
【解決手段】把持爪43をそれぞれ備えた3つの把持爪ユニット24が、ボビンBの周方向に沿って配置されている。把持爪ユニット24を形成するスライド部材41の上面には、ボビンの周方向に関する一方側(図の反時計回り方向側)にいくほど、ボビンBの径方向に関して内側に位置するように延びた案内溝47が形成されている。3つの把持爪ユニット24の案内溝47内には、それぞれ、略円柱形状の案内部材3が配置されており、これらの案内部材33は、ボビンBの周方向に回動可能な1つの回動部材23に取り付けられている。エアシリンダ26を駆動して、回動部材23をボビンBの周方向に回動させると、案内部材33が案内溝47に沿って移動することで、3つの把持爪ユニット24がそれぞれ、ボビンBの径方向に移動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ボビンの残糸を除去する残糸除去装置に関する。
【背景技術】
【0002】
ボビンに残った糸(残糸)を除去する残糸除去装置が知られている。このような残糸除去装置として、例えば、特許文献1に記載の残糸除去装置においては、ボビンの径方向に移動可能な2つの略半円形状の半円部材が、ボビンをその径方向から挟むように配置されている。2つの半円部材の互いの対向面には、それぞれ、ボビンとほぼ同じ径の半円形状の半円爪が形成されており、2つの半円部材をボビンの径方向内側に移動させると、半円爪の表面がボビンの外周面に押し付けられることによって、ボビンの残糸が把持される。そして、この状態で、2つの半円部材を上方(ボビンの先端側)に移動させると、ボビンから残糸が抜き取られる。
【0003】
また、特許文献2に記載の残糸除去装置(巻糸残部除去装置)は、ボビン(コップ)の周方向に沿って配置されているとともにピンにより旋回可能に支持された、ボビンを把持するための4つの掻き取りジョーを備えている。4つの掻き取りジョーは、引っ張りバネの引っ張り力により一方側に旋回して、ボビンの外周面に押し付けられている。そのため、ボビンの径によらず、4つの掻き取りジョーをボビンの外周面に押し付けることができる。
【0004】
そして、4つの掻き取りジョーがボビンの外周面に押し付けられた状態で、これらの掻き取りジョーが配置された送り台を上昇させることによって、ボビンに残った残糸を除去することができる。なお、特許文献2に記載の残糸除去装置では、レバーが操作されると、4つの掻き取りジョーに引っ張りバネによる引っ張り力と反対方向の力が加わり、4つの掻き取りジョーは、この力によって、上記一方側と反対側に旋回して、ボビンの外周面から離れる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−70043号公報
【特許文献2】特許第3383678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の残糸除去装置では、半円部材に形成された半円爪の径がボビンの径とほぼ同じであるため、半円部材を交換するなどしない限りは、異なる径のボビンの残糸の抜き取りを行うことはできない。そのため、装置の汎用性が低くなる、あるいは、1つの残糸除去装置によって、径の異なる複数種類のボビンの残糸を除去しようとした場合には、ボビンの種類(径)が変わる度に、半円部材を交換する必要が生じる。
【0007】
一方、特許文献2に記載の残糸除去装置では、ボビンの径によらず、掻き取りジョーをボビンの外周面に押し付けることが可能であるが、掻き取りジョーが、引っ張りバネの引っ張り力によって旋回してボビンの外周面に押し付けられているだけであるので、掻き取りジョーがボビンの外周面を押し付ける力はそれほど大きなものではない。そのため、4つの掻き取りジョーでボビンを把持した状態で送り台を上昇させたときに、残糸の一部が掻き取りジョーとボビンとの間をすり抜けてしまい、残糸を完全に除去することができない虞がある。
【0008】
本発明の目的は、ボビンの径によらず残糸の除去が可能であり、且つ、残糸を確実に除去することが可能な残糸除去装置を提供することである。
【課題を解決するための手段】
【0009】
第1の発明に係る残糸除去装置は、残糸が除去されるボビンの周方向に沿って配置されているとともに、前記ボビンの径方向に移動可能となった、残糸を把持するための3以上の残糸把持爪と、前記3以上の残糸把持爪を前記ボビンの径方向に移動させることによって、前記3以上の残糸把持爪が前記ボビンの外周面に押し付けられて前記ボビンの残糸を把持する把持状態と、前記3以上の残糸把持爪が前記ボビンの外周面から離隔した離隔状態との間で前記残糸把持爪の状態を切り換える切換機構と、前記3以上の残糸把持爪を、前記ボビンの軸方向に等距離移動させる移動機構とを備えていることを特徴とする。
【0010】
本発明によると、把持状態の残糸把持爪をボビンの軸方向先端側に移動させることにより、ボビンの残糸を除去することができる。また、3以上の残糸把持爪をボビンの径方向に移動させることによってボビンに押し付けるため、残糸把持爪の移動量を適宜調整すれば、ボビンの径によらず残糸把持爪をボビンの外周面に押し付けることができる。さらに、残糸把持爪をボビンの径方向に移動させることによりボビンの外周面に押し付けているため、残糸把持部材がボビンの外周面を押し付ける力を大きくすることができ、ボビンの残糸を確実に除去することができる。
【0011】
第2の発明に係る残糸除去装置は、第1の発明に係る残糸除去装置において、前記切換機構は、前記3以上の残糸把持爪に対して共通に設けられた1つの駆動源と、前記駆動源の駆動力を、前記3以上の残糸把持爪の各々に伝達する伝達機構と、を備えていることを特徴とする。
【0012】
本発明によると、共通の駆動源により3以上の残糸把持爪をまとめてボビンの径方向に移動させるため、3以上の残糸把持爪を、均一にボビンに押し付けることができる。また、3以上の残糸把持爪に対して個別に駆動源を設ける場合よりも、装置の構成を簡単にすることができる。
【0013】
第3の発明に係る残糸除去装置は、第1又は第2の発明に係る残糸除去装置において、前記伝達機構は、前記3以上の残糸把持爪に対して共通に設けられており、前記駆動源の駆動力によって、前記ボビンの周方向に回動する回動部材と、前記3以上の残糸把持爪に対して個別に設けられており、前記回動部材が回動する力を、対応する残糸把持爪が前記ボビンの径方向に移動する力に変換する3以上のカム機構と、を備えていることを特徴とする。
【0014】
本発明によると、駆動源により共通の回動部材を回動させ、回動部材が回動する力を残糸把持爪に個別に設けられたカム機構により、残糸把持爪がボビンの径方向に移動する力に変換することにより、共通の駆動源を用いて3以上の残糸把持爪をまとめてボビンの径方向に移動させることができる。
【0015】
第4の発明に係る残糸除去装置は、第3の発明に係る残糸除去装置において、前記3以上のカム機構は、それぞれ、前記残糸把持爪に設けられており、前記ボビンの周方向に関して一方側にいくほど、前記ボビンの径方向外側にくるように延びた案内面と、前記回動部材に設けられており、前記案内面に当接する当接部材と、を備えていることを特徴とする。
【0016】
本発明によると、残糸把持爪の各々に対して、ボビンの周方向に関して一方側にいくほど、ボビンの径方向外側にくるように延びた案内面を設け、回動部材に案内面に当接する当接部材を設けることにより、回動部材が回動する力を、残糸把持爪がボビンの径方向に移動する力に変換するカム機構を形成することができる。
【0017】
第5の発明に係る残糸除去装置は、第2〜第4のいずれかの発明に係る残糸除去装置において、前記駆動源がエアシリンダであることを特徴とする。
【0018】
本発明によると、エアシリンダが残糸把持爪の駆動源となっているため、残糸把持爪をボビンに押し付けたときに、残糸把持爪がボビンから押し返されてボビンの径方向と外側に移動することがなく、残糸把持爪を確実にボビンに押し付けることができる。
【0019】
第6の発明に係る残糸除去装置は、第1〜第5のいずれかの発明に係る残糸除去装置において、前記残糸把持爪の、前記密着状態において前記ボビンの外周面と接触する部分が、弾性材料によって構成されていることを特徴とする。
【0020】
本発明によると、残糸把持爪のボビンの外周面との接触部分が弾性材料によって構成されているため、残糸把持爪を、大きな力でボビンの外周面に押し付けた状態でボビンの軸方向に移動させて残糸を除去した場合でも、ボビンの外周面が傷つくことがない。
【発明の効果】
【0021】
本発明によれば、把持状態の残糸把持爪をボビンの軸方向先端側に移動させることにより、ボビンの残糸を除去することができる。また、3以上の残糸把持爪をボビンの径方向に移動させることによってボビンに押し付けるため、残糸把持爪の移動量を適宜調整すれば、ボビンの径によらず残糸把持爪をボビンの外周面に押し付けることができる。さらに、残糸把持爪をボビンの径方向に移動させることによりボビンの外周面に押し付けているため、残糸把持部材がボビンの外周面を押し付ける力を大きくすることができ、ボビンの残糸を確実に除去することができる。
【図面の簡単な説明】
【0022】
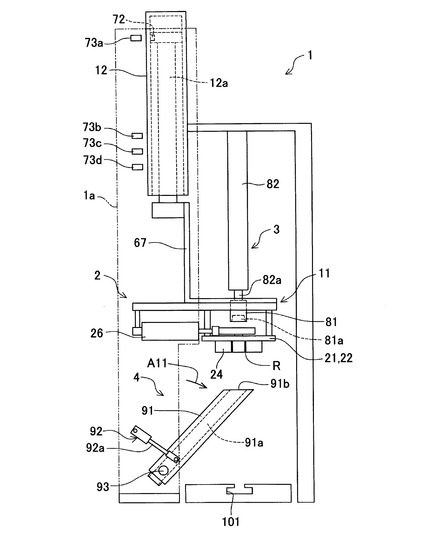
【図1】本発明の実施の形態に係る残糸除去装置の概略構成図である。
【図2】図1の残糸把持機構の平面図である。
【図3】図2において上側の基材を除いた図である。
【図4】図3においてさらに下側の基材を除いた図である。
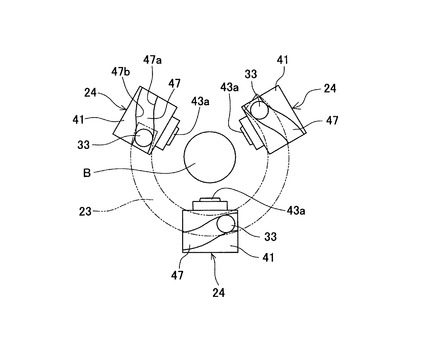
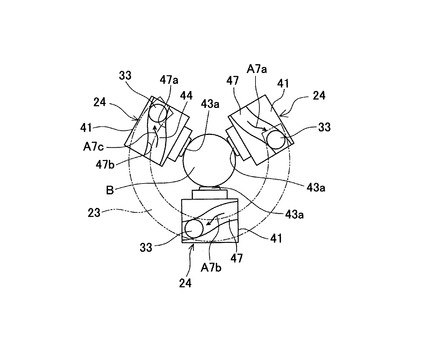
【図5】図2〜図4における回動部材と3つの把持爪との位置関係を示す図である。
【図6】図4のVI−VI線断面図である。
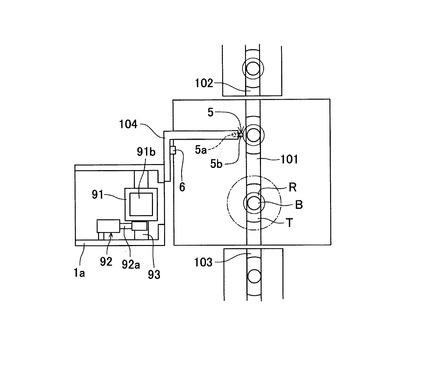
【図7】図1を矢印VIIの方向から見た図である。
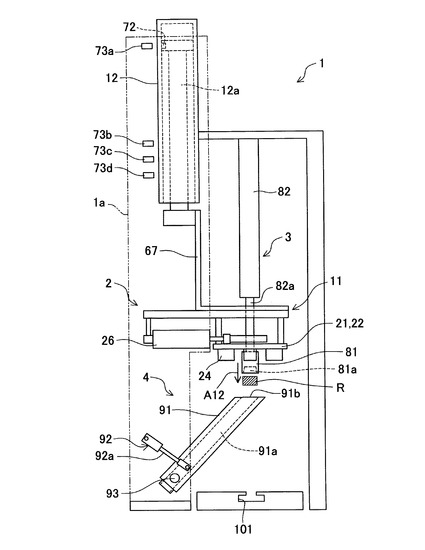
【図8】残糸抜き取り装置及びボビン押さえ装置を降下させた状態を示す図である。
【図9】図8の状態での残糸把持機構の図4相当の図である。
【図10】図8の状態での残糸把持機構の図5相当の図である。
【図11】ボビンから残糸を抜き取った直後の状態を示す図である。
【図12】筒状部材を回動させて、回収口を把持爪の下方に位置させた状態を示す図である。
【図13】把持爪が把持していた残糸を回収口に落下させているときの状態を示す図である。
【図14】把持爪により径の大きいボビンを把持している状態を示す図9相当の図である。
【発明を実施するための形態】
【0023】
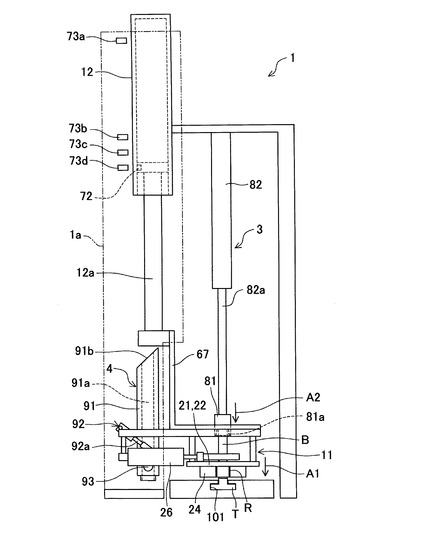
次に、本発明の好適な実施の形態について説明する。図1に示すように、残糸除去装置1は、残糸抜き取り装置2、ボビン押さえ装置3、残糸回収装置4、糸有無センサ5、糸量センサ6などを備えている。
【0024】
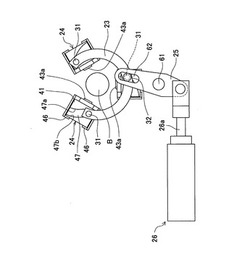
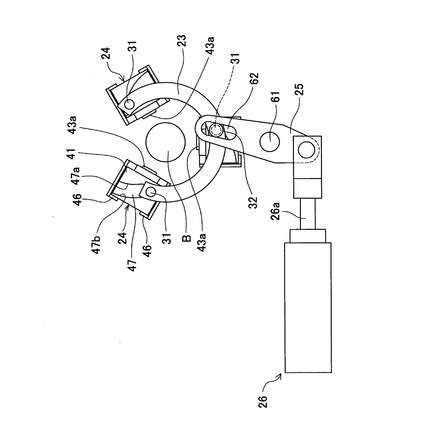
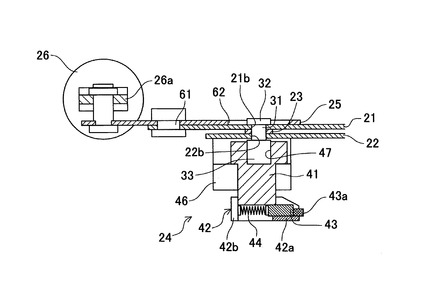
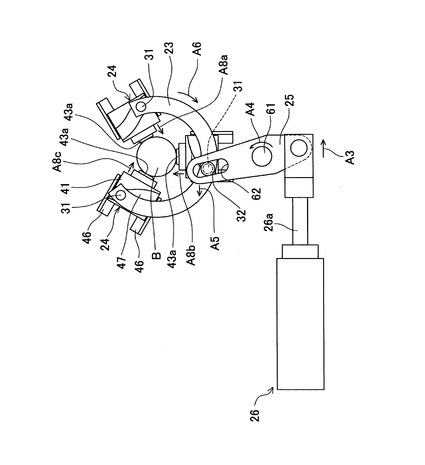
残糸抜き取り装置2は、残糸把持機構11とエアシリンダ12(移動機構)とを備えている。残糸把持機構11は、図1〜図6に示すように、2枚の基材21、22、回動部材23、3つの把持爪ユニット24、回動アーム25、エアシリンダ26などを備えている。ただし、図6では、便宜上、回動アーム25については、後述する案内部材33が案内溝47の略中央部に位置しているときの状態(後述する図14の状態)での断面を示している。
【0025】
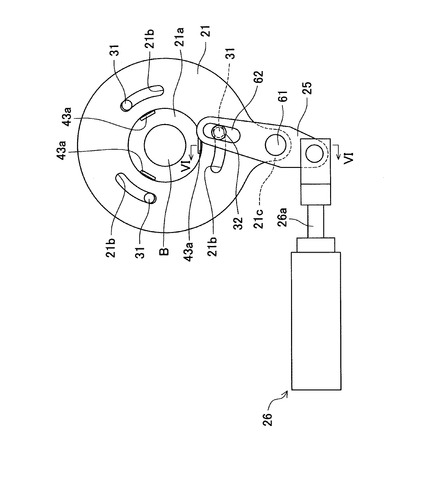
2枚の基材21、22は、金属材料からなる略円形の板状体であり、残糸抜き取り装置2により残糸Rが抜き取られる、上下方向を軸方向とするボビンBの上方に、上下に重なって配置されている。2枚の基材21、22のうち、上側(図2の紙面手前側)に配置された基材21には、その略中央部に略円形の貫通孔21aが形成されている。また、基材21には、その外周端と貫通孔21aとの間の部分に、それぞれが周方向に延びているとともに、周方向に間隔をあけて配置された3つのガイド孔21bが形成されている。また、基材21の図2における下側の端部は、径方向外側に突出した突出部21cとなっている。
【0026】
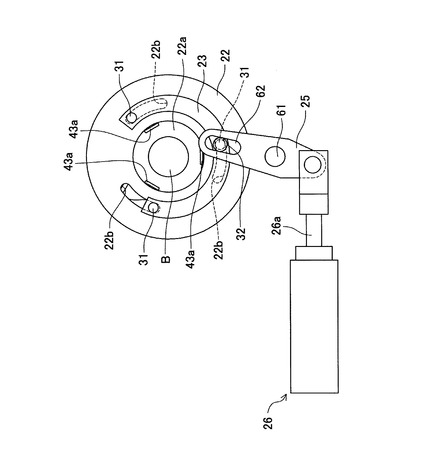
2枚の基材21、22のうち、下側(図2の紙面奥側)に配置された基材22には、貫通孔21a及び3つのガイド孔21bと重なる位置に、それぞれ、貫通孔21aとほぼ同形状の貫通孔22a、及び、ガイド孔21bとほぼ同じ形状のガイド孔22bが形成されている。
【0027】
回動部材23は、基材21と基材22との間の配置されており、基材21、22の周方向に延びて、3つのガイド孔21b及び3つのガイド孔22bと重なっている。また、回動部材23には、3つのガイド孔21b、及び、3つのガイド孔22bと重なる部分に、回動部材23を上下に貫通する3つの貫通部材31が取り付けられている。
いる。
【0028】
3つの貫通部材31は、ガイド孔21bを通って基材21を貫通しており、3つの貫通部材31のうち、真ん中の貫通部材31には、基材21よりも上方に位置するその上端部に、略円柱形状の嵌合ピン32が取り付けられている。また、3つの貫通部材31は、ガイド孔22bを通って基材22を貫通しており、基材22よりも下方に位置するその下端部に略円柱形状の案内部材33(当接部材)が設けられている。
【0029】
また、ガイド孔21b、22bを貫通するように延びた貫通部材31は、ガイド孔21b、22bに沿って、基材21、22の周方向に移動可能となっており、これにより、貫通部材31が取り付けられた回動部材23が、ボビンBの周方向に回動可能となっている。
【0030】
3つの把持爪ユニット24は、基材22の下方に、ボビンBの周方向に沿って配置されており、それぞれ、スライド部材41、把持爪取り付け部材42、把持爪43、バネ44などを備えている。スライド部材41は、基材22の周方向の両側から、基材22の下面に配置された2本のガイドレール46に挟まれており、ガイドレール46に沿ってボビンBの径方向に移動可能となっている。
【0031】
また、スライド部材41の上面には、案内溝47が形成されている。案内溝47は、上述の案内部材33の直径とほぼ同じ幅の溝であり、案内溝47に沿って延びた2つの側壁面が案内面47a、47bとなっている。また、案内溝47(案内面47a、47b)は、ボビンBの周方向に関して図3の反時計回り方向側の部分ほど(一方側にいくほど)、ボビンBの径方向に関して内側に位置するように延びている。案内溝47内には、上述の案内部材33が配置されており、案内部材33の外周面が、案内溝47の案内面47a、47bに当接している。
【0032】
把持爪取り付け部材42は、スライド部材41の下端部に取り付けられている。また、把持爪取り付け部材42には、ボビンBの径方向に関する内側の端部に把持爪支持部42aが設けられており、ボビンBの径方向に関する外側の端部にバネ取り付け部42bが設けられている。
【0033】
把持爪43は、把持爪支持部42aに、下側及び基材22の周方向に関する両側から支持されており、スライド部材41とは独立してボビンBの径方向に移動可能となっている。また、把持爪43には、基材22の径方向に関する内側の端部に、ウレタンなどの弾性材料からなる弾性部43aが設けられている。なお、把持爪43の弾性部43a以外の部分は、例えば、金属材料などによって構成されている。
【0034】
バネ44は、バネ取り付け部42bと把持爪43との間に配置されており、その両端が、それぞれ、バネ取り付け部42b及び把持爪43の弾性部43aと反対側の端部に取り付けられている。これにより、把持爪43はバネ44によって、ボビンBの径方向内側に付勢されている。
【0035】
回動アーム25は、金属材料などからなる、水平方向に延びた板状の部材であり、基材21の上面に配置されているとともに、その略中央部が、基材21の突出部21cに設けられた、鉛直方向に延びた回動軸61に回動自在に支持されている。また、回動アーム25の一方の端部には、回動アーム25を貫通する長孔62が形成されており、長孔62には上述の嵌合ピン32が嵌合している。
【0036】
また、回動アーム25の長孔62と反対側の端部は、基材21と重ならない位置まで延びており、エアシリンダ26のピストン26aに取り付けられている。これにより、エアシリンダ26を駆動して、ピストン26aに取り付けられた回動アーム25の端部を図2の左右方向に移動させることによって、回動アーム25を、回動軸61を中心に回動させることができる。
【0037】
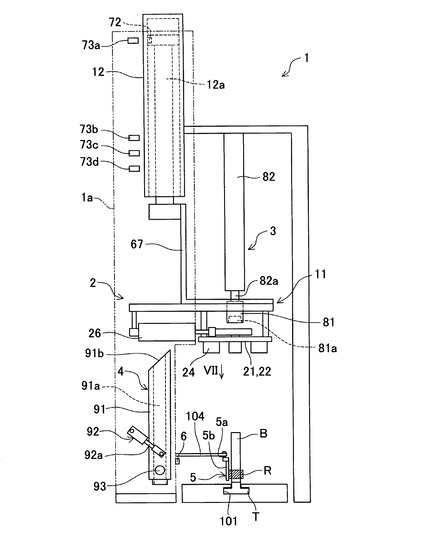
また、残糸把持機構11は、上述の基材21及びエアシリンダ26が、それぞれ、取り付け部材67を介してエアシリンダ12のピストン12aに固定されることによって、エアシリンダ12に取り付けられている。エアシリンダ12は、残糸除去装置1の機台1aに固定されており、ピストン12aを昇降させることによって、残糸把持機構11を昇降させる。また、ピストン12aには、その上端部に発光素子72が設けられており、発光素子72は、エアシリンダ12の外部に向けて図1の左方に光を照射する。
【0038】
エアシリンダ12の図1における左側には、上下に並んだ状態で残糸除去装置1の機台1aに取り付けられた4つの受光素子73a〜73dが配置されている。受光素子73a〜73dは、発光素子72から照射された光を受光するものであり、ピストン12aが昇降して、発光素子72が受光素子73a〜73dと同じ高さにきたときに、それぞれ、発光素子72から照射された光を受光する。これにより、ピストン12aが受光素子73a〜73dに対応する高さにきたことを検出することができる。なお、受光素子73a〜73dが、それぞれ、どのような高さに配置されているかについては、後程説明する。
【0039】
ボビン押さえ装置3は、押さえ部材81とエアシリンダ82とを備えている。押さえ部材81は、残糸Rが除去されるボビンBのほぼ真上に配置された、基材21、22の貫通孔21a、22aよりも径の小さい略円柱形状の部材である。また、押さえ部材81の下面には、ボビンBの上端部が嵌合可能な略円形の凹部81aが形成されている。凹部81aは、テーパ状になっており、上側の部分ほど径が小さくなっている。押さえ部材81は、エアシリンダ82のピストン82aに取り付けられており、エアシリンダ82は、ピストン82aを昇降させることによって押さえ部材81を昇降させる。
【0040】
残糸回収装置4は、筒状部材91、エアシリンダ92などを備えている。筒状部材91は、残糸の除去を行う前の状態(図1の状態)でほぼ鉛直方向に延びた筒状の部材であり、軸方向断面が略矩形となっている。また、筒状部材91の内部空間は、残糸Rを回収するための残糸回収経路91aとなっており、残糸回収経路91aの上端が、残糸Rを残糸回収経路91aに導入するための回収口91bとなっている。一方、残糸回収経路91aの下端は、図示しない負圧源に接続されている。これにより、残糸回収装置4においては、回収口91bから残糸回収経路91aに導入された残糸Rを吸引することができるようになっている。
【0041】
また、筒状部材91は、その下端部が、図1の紙面垂直方向に延びた回動軸93に回動自在に支持されているとともに、回動軸93よりも少し上の部分にエアシリンダ92のピストン92aが取り付けられている。エアシリンダ92は、機台1aに取り付けられており、ピストン92aを移動させることによって、筒状部材91を、回動軸93を中心に回動させる。
【0042】
糸有無センサ5は、ボビンBにおける残糸Rの有無検出するためのセンサである。糸量センサ6は、糸有無センサ5により残糸Rが検出されたボビンBにおける残糸Rの量が所定量以上であるか否かを検出するためのセンサである。
【0043】
より詳細に説明すると、図1、図7に示すように、残糸把持機構11の2枚の基材21、22、回動部材23及び3つの把持爪ユニット24や、ボビン押さえ装置3の下方には、図7の上下方向に延びたレール101が設けられている。レール101は、一方の端部(図7における上端部)において処理ボビン供給経路102に接続されているとともに、他方の端部(図7における下端部)において処理ボビン排出経路103に接続されている。レール101、処理ボビン供給経路102及び処理ボビン排出経路103は、トレイ100を走行させるためのものであり、ボビンBは、トレイ100の上端に、上下方向を軸方向とする直立した姿勢で支持されている。
【0044】
そして、レール101には、処理ボビン供給経路102から、図示しない自動ワインダーなどにおいて、糸の供給が完了して排出されたボビンBが供給される。また、後述するように、レール101から処理ボビン排出経路103にボビンBが排出される。
【0045】
糸有無センサ5は、上下方向に延びた回動軸5aを備えており、回動軸5aが、機台1aに取り付けられた取り付け部材104に回動可能に支持されている。また、糸有無センサ5は、平面視で回動軸5aとずれた位置において上下方向に延びた接触部5bを備えており、接触部5bが、レール101のうち、残糸把持機構11の基材21、22、回動部材23及び3つの把持爪ユニット24や、ボビン押さえ装備3のほぼ真下の残糸抜き取り位置(図7の一点鎖線で囲まれたボビンBの位置)よりも処理ボビン供給経路102側(図7の上側)の部分の近傍に配置されている。
【0046】
そして、レール101の当該部分を通過するボビンBに残糸Rがある場合には、残糸Rが接触部5bに接触し、これにより、糸有無センサ5が回動軸5aを中心に回動する。一方、残糸Rがない場合には、ボビンBは、接触部5bに接触しない。これにより、糸有無センサ5が回動軸5aを中心に回動するか否かによって、ボビンBにおける残糸Rの有無を検出することができる。
【0047】
そして、糸有無センサ5により、ボビンBにおいて残糸Rが検出された場合には、次に説明する、糸量センサ6による残糸Rの量の検出が行われる。一方、糸有無センサ5により、ボビンBにおいて残糸Rが検出されなかった場合には、次に説明する残糸Rの量の検出や、後述する残糸Rの抜き取りは行われず、当該ボビンBは、そのまま、処理ボビン排出経路103に排出され、ボビン搬送経路103からボビンBに糸を巻き取るための糸巻取装置に搬送される。
【0048】
糸量センサ6は、発光素子と受光素子とが隣接して配置された、いわゆる反射型の光学式センサであり、レール101の、上記残糸抜き取り位置よりもボビン供給流路102側(図7の上側)であり、且つ、糸有無センサ5が設けられた部分よりも処理ボビン排出経路103側(図7の下側)の部分に搬送されてきたボビンBのうち、糸有無センサ5により残糸Rが検出されたボビンBに向けて光を照射する。より詳細に説明すると、糸量センサ6は、ボビンBの下端部よりも少し上方に位置する部分に向けて、ボビンBとほぼ同じ色の光を照射する。なお、ボビンBの色は、糸の色とは異なっている(例えば、ボビンBの色が赤で、糸の色が白となっている)。
【0049】
このとき、ボビンBの残糸Rの量が多く、ボビンBの、糸量センサ6の発光素子から照射された部分に残糸Rがある場合には、糸量センサ6の発光素子から照射された光は、残糸Rに反射し、その反射光て糸量センサ6の受光素子に受光される。一方、ボビンBの残糸Rの量が少なく、ボビンBの、糸量センサ6の発光素子から照射された光よりも低い部分にしか残糸Rがない場合には、糸量センサ6の発光素子から照射された光は、ボビンBの外周面に当たるが、ボビンBの外周面では反射されないので、糸量センサ6の受光素子において光が受光されることはない。
【0050】
これにより、糸量センサ6においては、受光素子において上記反射光が受光されるか否かによって、ボビンBにおける残糸Rの量が所定量(発光素子から照射される光の高さに対応する量)以上であるか否かを検出することができる。
【0051】
そして、残糸Rの量が所定量よりも少ない場合には、ボビンBは、次に説明する残糸Rの抜き取りが行われた後に、処理ボビン排出経路103に送られ、処理ボビン排出経路103から、ボビンBに糸を巻き取るための糸巻取装置に搬送される。一方、残糸Rの量が所定量以上の場合には、残糸Rの抜き取りは行われず、そのまま処理ボビン排出経路103に送られ、処理ボビン排出経路103から自動ワインダーに戻され、自動ワインダーにおいて、当該ボビンから糸が供給される。
【0052】
次に、残糸除去装置1を用いて、ボビンBの残糸Rを除去する方法について説明する。ここで、以下に説明する残糸Rの除去は、上述したように、処理ボビン供給経路102からレール101に搬送されてきたボビンBのうち、糸有無センサ5により残糸Rが検出され、且つ、糸量センサ6により残糸Rの量が所定量以上であることが検出されなかったボビンBに対してのみ行われる。残糸Rの除去が行われるボビンBは、レール101に沿って、残糸把持機構11の基材21、22や、ボビン押さえ装置3のほぼ真下の残糸抜き取り位置まで搬送され、残糸Rが抜き取られるまでの間、その位置で静止する。
【0053】
一方、残糸抜き取り装置2においては、残糸Rの抜き取りを行う前の状態では、図2〜図5に示すように、回動部材23に設けられた3つの案内部材33が、それぞれ、対応する把持爪ユニット24の案内溝47のうち、基材21、22の径方向に関して最も内側に位置する一方の端部の近傍に位置しており、把持爪43の先端部に設けられた弾性部43aは、基材21、22の径方向に関して、ボビンBの外周面よりも外側に位置している。なお、このように、3つの把持爪43がボビンBの径方向に関してボビンBの外周面から離隔している状態が、本発明に係る離隔状態に相当する。
【0054】
また、エアシリンダ12においては、ピストン12aが、発光素子72が受光素子73aとほぼ同じ高さに位置している。このとき、残糸把持機構11は、ボビンBの上端よりも上方に位置している。すなわち、受光素子73aは、残糸把持機構11がボビンBの上端よりも上方のある高さに位置しているときの、発光素子72と同じ高さに設けられている。
【0055】
また、ボビン押さえ装置3においては、押さえ部材81が、ボビンBの上端よりも上方に位置している。また、残糸回収装置4においては、図1に示すように、筒状部材91がほぼ直立した姿勢となっており、機台1aの内部に収まっている。これにより、筒状部材91が、レール101におけるボビンBの搬送の邪魔になったり、ボビンBを上記残糸抜き取り位置に配置することができなくなったりすることがない。
【0056】
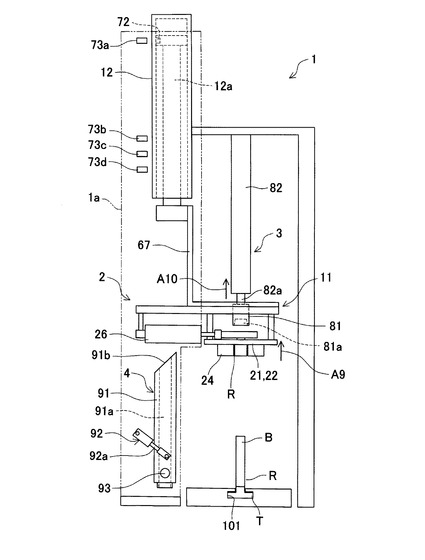
そして、残糸Rを除去すべきボビンBが、上記残糸抜き取り位置に搬送されてくると、エアシリンダ12を駆動して、図8に矢印A1で示したように、ピストン12aを、発光素子72が受光素子73dとほぼ同じ高さになるまで降下させる。このとき、残糸把持機構11は、把持爪43(把持爪ユニット24)がボビンBの下端部とほぼ同じ高さにくるまで降下する。すなわち、受光素子73dは、把持爪43がボビンBの下端部とほぼ同じ高さに位置しているときの発光素子72とほぼ同じ高さに設けられている。
【0057】
また、このとき、基材21、22には、上述したように、その略中央部に貫通孔21a、22aが形成されているため、残糸把持機構11を降下させたときに、ボビンBは貫通孔21a、22aを通過する。したがって、ボビンBが、残糸把持機構11と接触してしまうことがない。
【0058】
さらに、残糸把持機構11の降下とほぼ同時に、図8に矢印A2で示したように、ボビン押さえ装置3において、エアシリンダ82を駆動して、押さえ部材81を、凹部81aがボビンBの上端部に嵌合する位置まで降下させる。
【0059】
次に、残糸把持機構11において、エアシリンダ26を駆動して、図9に矢印A3で示したように、ピストン26aを伸ばすことにより、矢印A4に示したように、回動アーム25を、図の反時計回り方向に回動させる。すると、回動軸61を挟んでピストン26aと反対側に位置する、回動アーム25の長孔62が形成された部分が、矢印A5で示したように図中左方に移動する。これにより、長孔62に嵌合された嵌合ピン32と嵌合ピン32が取り付けられた貫通部材31がガイド孔21b、22bに沿って、図9の時計回り方向に移動する。これに伴って、残り2つの貫通部材31も、ガイド孔21b、22bに沿って図9の時計回り方向に移動し、3つの貫通部材31の移動によって、回動部材23が、矢印A6で示したように図9の時計回り方向に回動する。
【0060】
回動部材23がこのように回動すると、回動部材23に設けられた3つの案内部材33が、それぞれ、図10に矢印A7a〜A7cで示したように、対応する把持爪ユニット24(スライド部材41)の案内溝47(案内面47a、47b)に沿って、案内溝47の基材21、22の径方向に関して外側に位置する他方の端部の近傍まで移動する。
【0061】
このとき、3つの貫通部材31がガイド孔21b、22bに挿通されているため、案内部材33は、基材21、22の径方向には移動できない。そのため、3つの把持爪ユニット24(スライド部材41)が、図9に矢印A8a〜A8cで示したように、ガイドレール46に沿ってボビンBの径方向内側に移動し、把持爪43の先端部に設けられた弾性部43aが、ボビンBの外周面に押し付けられる。また、このとき、把持爪43は、バネ44によってボビンBの径方向内側に付勢されているため、把持爪43の弾性部43aは、ボビンBの外周面に密着する。そして、これにより、3つの把持爪43によってボビンBの残糸Rが把持される。なお、このように3つの把持爪43がボビンBの外周面に押し付けられている状態が、本発明に係る把持状態に相当する。
【0062】
ここで、本実施の形態では、案内部材33と案内溝47とを合わせたものが、回動部材23が回動する力を、把持爪ユニット24がボビンの径方向に移動する力に変換する、本発明に係るカム機構に相当する。また、このカム機構と、回動部材23及び回動アーム25とを合わせたものが、エアシリンダ26の駆動力を、3つの把持爪ユニット24に伝達する、本発明に係る伝達機構に相当する。そして、この伝達機構とエアシリンダ26とを合わせたものが、3つの把持爪43がボビンBの外周面に押し付けられて残糸Rを把持する把持状態(図8の状態)と、3つの把持爪43がボビンBの外周面から離隔した離隔状態(図4の状態)とを切り換える、本発明に係る切換機構に相当する。
【0063】
次に、この状態で、エアシリンダ12を駆動して、ピストン12aを、発光素子72が受光素子73cと同じ高さがにくるまで上昇させる。このとき、残糸把持機構11は、把持爪43がボビンBの途中のある部分と同じ高さまで上昇する。すなわち、受光素子73cは、把持爪43がボビンBの途中のある部分と同じ高さとなったときの、発光素子72とほぼ同じ高さに配置されている。
【0064】
そして、この残糸把持機構11の上昇により、把持爪43に把持されたボビンBの残糸Rは、ボビンBの軸方向に沿って上方に持ち上げられる。このとき、ボビンBの上端が押さえ部材81によって押さえられているため、ボビンBが残糸Rと一緒に持ち上げられてしまうことはない。
【0065】
次に、エアシリンダ26を駆動して3つの把持爪43をボビンBの径方向外側に移動させることにより、上記離隔状態(図2〜図4の状態)に戻してから、上述したのと同様、エアシリンダ12により、残糸把持機構11を図8に示す位置まで降下させる。続いて、上述したのと同様、エアシリンダ26を駆動して3つの把持爪43をボビンBの径方向内側に移動させることにより、上記把持状態(図9の状態)とし、この状態で、エアシリンダ12を駆動して、残糸把持機構11を上昇させて、ボビンBの残糸Rを持ち上げる。
【0066】
ただし、このときには、ピストン12aを、発光素子72が受光素子73bと同じ高さにくるまで上昇させる。このとき、残糸把持機構11は、把持爪43がボビンBの途中の前回の上昇時よりも高い位置にくるまで上昇する。すなわち、受光素子73bは、受光素子73cよりも少し上方に配置されている。
【0067】
次に、再度、上記離隔状態に戻してから、上述したのと同様、エアシリンダ12により、残糸把持機構11を図8に示す位置まで降下させる。続いて、再度、上記把持状態としてから、エアシリンダ12を駆動して、図11に矢印A9に示したように、ピストン12aを、発光素子72が受光素子73aと同じ高さにくるまで上昇させる。これにより、残糸把持機構11は、把持爪43(把持爪ユニット24)がボビンBよりも上方の位置まで上昇する。
【0068】
さらに、このとき、把持爪43がボビンBの上端部と同じ高さにきたタイミングで、図11に矢印A10で示したように、エアシリンダ82を駆動して、押さえ部材81をボビンBの上端よりも上方まで上昇させる。
【0069】
これにより、ボビンBの残糸Rは、残糸把持機構11に持ち上げられることによってボビンBから抜き取られ、ボビンBの上方において、3つの把持爪43によって把持される。また、このとき、上述したように、把持爪43の上昇と降下を繰り返すことにより、ボビンBの残糸Rを、少しずつ上方に持ち上げた後にボビンBから抜き取るため、ボビンBから確実に残糸Rを抜き取ることができる。
【0070】
次に、残糸Rが抜き取られたボビンBが、レール101から処理ボビン排出経路103に向けて搬送されてから、エアシリンダ92を駆動して、図12に矢印A11で示したように、筒状部材91を図の時計回り方向に回動させることによって、筒状部材91を、回収口91bが把持爪ユニット24のほぼ真下にくるまで傾ける。続いて、上記離隔状態に戻すことにより、把持爪43による残糸Rの把持を解除してから、図13に矢印A12で示したように、押さえ部材81を自重で降下させる。
【0071】
すると、押さえ部材81が、貫通孔21a、22a及び3つの把持爪43に囲まれた領域を通過して、3つの把持爪43よりも下方まで降下し、このとき、3つの把持爪43による把持が解舒された残糸Rが、押さえ部材81によって下方に押されて落下する。そして、落下した残糸Rが、回収口91bから残糸回収経路91aに導入されて吸引される。
【0072】
この後、エアシリンダ82により押さえ部材81を上昇させるとともに、エアシリンダ92を駆動して、筒状部材91を図1の反時計回り方向に回動させることにより、図1の状態に戻す。そして、以下、同様にして、残糸抜き取り位置に搬送されてきたボビンBの残糸Rの除去が順次行われる。
【0073】
以上に説明した実施の形態によると、ボビンBの径方向に移動可能な3つの把持爪43の弾性部43aをボビンBの外周面に押し付けて、ボビンBの残糸Rを把持するため、ボビンBの径によらず、ボビンBの残糸Rを把持することが可能となる。
【0074】
より詳細に説明すると、図4などに示すボビンBものよりも径の大きいボビンBの外周面に把持爪43を押し付けて当該ボビンBの残糸Rを把持する場合には、図14に示すように、エアシリンダ26におけるピストン26aの移動量を、図8の場合よりも小さくする。これにより、回動アーム25及び回動部材23の回動角度が図8に示す場合よりも小さくなり、把持爪43のボビンBの径方向内側への移動量を小さくなる。そして、このように、ボビンBの径に応じて、ピストン26aの移動量を調整すれば、ボビンBの径によらず、把持爪43をボビンBの外周面に押し付けてボビンBの残糸Rを把持することができる。
【0075】
また、このとき、上述したように、押さえ部材81の凹部81aがテーパ状になっているため、ボビンBの径が異なる場合でも、ボビンBの上端部を凹部81aに嵌合させることが可能である。
【0076】
また、ボビンBの径方向に移動可能な3つの把持爪43の弾性部43aをボビンBの外周面に押し付けて、ボビンBの残糸Rを把持するため、把持爪43を大きな力でボビンBの外周面に押し付けることができ、ボビンBの残糸Rを確実に把持することができる。
【0077】
また、エアシリンダ26を駆動すると、エアシリンダ26の駆動力によって3つの把持爪43に対して共通に設けられた回動部材23が回動し、回動部材23の回動が、案内部材33と案内溝47(案内面47a、47b)とによって、3つの把持爪ユニット24をボビンBの径方向に移動させる力に変換されるため、3つの把持爪43(把持爪ユニット24)に共通に設けられたエアシリンダ26を駆動すれば、3つの把持爪43が同時にボビンBの径方向に移動する。したがって、3つの把持爪43を均一にボビンBの外周面に押し付けることができる。また、3つの把持爪43に対して個別にエアシリンダなどの駆動源を設ける場合よりも、装置の構成を簡単にすることができる。
【0078】
また、3つの把持爪ユニット24をボビンBの径方向に移動させるための駆動源が、エアシリンダ26であるため、把持爪43がボビンBの外周面に押し付けられたときに、把持爪ユニット24がボビンBに押し返されて、ボビンBの径方向外側に移動してしまうことがない。したがって、把持爪43を確実にボビンの外周面に押し付けることができる。
【0079】
また、ボビンBの外周面に接触する把持爪43の先端部に、弾性材料からなる弾性部43aが設けられているため、把持爪43が大きな力でボビンBの外周面に押し付けられた状態で把持爪43を上昇させても、ボビンBの外周面が傷ついてしまうことがない。
【0080】
次に、本実施の形態に種々の変更を加えた変形例について説明する。ただし、本実施の形態と同様の構成については、適宜その説明を省略する。
【0081】
上述の実施の形態では、3つの把持爪ユニット24に対して共通に設けられた回動部材23が回動する力を、案内部材33と案内溝47とによって、3つの把持爪43がボビンBの径方向に移動する力に変換したが、これには限られない。すなわち、案内部材33及び案内溝47以外のカム機構によって、回動部材23が回動する力を3つの把持爪ユニット24がボビンBの径方向に移動する力に変換してもよい。
【0082】
さらには、回動部材23が回動する力を、カム機構によって、3つの把持爪43がボビンBの径方向に移動する力に変換することにも限られない。すなわち、エアシリンダ26の駆動力を、別の伝達機構で3つの把持爪43に伝達することによって、3つの把持爪43を、ボビンBの径方向に移動させてもよい。
【0083】
また、把持爪43を移動させるための駆動源は、エアシリンダ26であることにも限られず、油圧シリンダやモータなど、エアシリンダ以外の駆動源を用いてもよい。
【0084】
また、上述の実施の形態では、3つの把持爪43に対して1つのエアシリンダ26が設けられていたが、3つの把持爪43に対して個別にエアシリンダなどの駆動源が設けられていてもよい。
【0085】
また、上述の実施の形態では、把持爪43のボビンBとの接触部分である先端部に、弾性材料からなる弾性部43aが設けられていたが、これには限られない。例えば、把持爪43は、全体が金属材料によって構成されているなど、ボビンBの外周面との接触部分を含む部分が金属材料など弾性材料以外の材料によって構成されていてもよい。
【0086】
また、上述の実施の形態では、ボビンBの周方向に沿って配置された3つの把持爪43によってボビンBの残糸Rを把持したが、ボビンBの周方向に沿って配置された4つ以上の把持爪43によってボビンBの残糸Rを把持してもよい。
【符号の説明】
【0087】
1 残糸除去装置
12 エアシリンダ
23 回動部材
25 回動アーム
26 エアシリンダ
33 案内部材
43 把持爪
43a 弾性部
47 案内溝
【技術分野】
【0001】
本発明は、ボビンの残糸を除去する残糸除去装置に関する。
【背景技術】
【0002】
ボビンに残った糸(残糸)を除去する残糸除去装置が知られている。このような残糸除去装置として、例えば、特許文献1に記載の残糸除去装置においては、ボビンの径方向に移動可能な2つの略半円形状の半円部材が、ボビンをその径方向から挟むように配置されている。2つの半円部材の互いの対向面には、それぞれ、ボビンとほぼ同じ径の半円形状の半円爪が形成されており、2つの半円部材をボビンの径方向内側に移動させると、半円爪の表面がボビンの外周面に押し付けられることによって、ボビンの残糸が把持される。そして、この状態で、2つの半円部材を上方(ボビンの先端側)に移動させると、ボビンから残糸が抜き取られる。
【0003】
また、特許文献2に記載の残糸除去装置(巻糸残部除去装置)は、ボビン(コップ)の周方向に沿って配置されているとともにピンにより旋回可能に支持された、ボビンを把持するための4つの掻き取りジョーを備えている。4つの掻き取りジョーは、引っ張りバネの引っ張り力により一方側に旋回して、ボビンの外周面に押し付けられている。そのため、ボビンの径によらず、4つの掻き取りジョーをボビンの外周面に押し付けることができる。
【0004】
そして、4つの掻き取りジョーがボビンの外周面に押し付けられた状態で、これらの掻き取りジョーが配置された送り台を上昇させることによって、ボビンに残った残糸を除去することができる。なお、特許文献2に記載の残糸除去装置では、レバーが操作されると、4つの掻き取りジョーに引っ張りバネによる引っ張り力と反対方向の力が加わり、4つの掻き取りジョーは、この力によって、上記一方側と反対側に旋回して、ボビンの外周面から離れる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−70043号公報
【特許文献2】特許第3383678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の残糸除去装置では、半円部材に形成された半円爪の径がボビンの径とほぼ同じであるため、半円部材を交換するなどしない限りは、異なる径のボビンの残糸の抜き取りを行うことはできない。そのため、装置の汎用性が低くなる、あるいは、1つの残糸除去装置によって、径の異なる複数種類のボビンの残糸を除去しようとした場合には、ボビンの種類(径)が変わる度に、半円部材を交換する必要が生じる。
【0007】
一方、特許文献2に記載の残糸除去装置では、ボビンの径によらず、掻き取りジョーをボビンの外周面に押し付けることが可能であるが、掻き取りジョーが、引っ張りバネの引っ張り力によって旋回してボビンの外周面に押し付けられているだけであるので、掻き取りジョーがボビンの外周面を押し付ける力はそれほど大きなものではない。そのため、4つの掻き取りジョーでボビンを把持した状態で送り台を上昇させたときに、残糸の一部が掻き取りジョーとボビンとの間をすり抜けてしまい、残糸を完全に除去することができない虞がある。
【0008】
本発明の目的は、ボビンの径によらず残糸の除去が可能であり、且つ、残糸を確実に除去することが可能な残糸除去装置を提供することである。
【課題を解決するための手段】
【0009】
第1の発明に係る残糸除去装置は、残糸が除去されるボビンの周方向に沿って配置されているとともに、前記ボビンの径方向に移動可能となった、残糸を把持するための3以上の残糸把持爪と、前記3以上の残糸把持爪を前記ボビンの径方向に移動させることによって、前記3以上の残糸把持爪が前記ボビンの外周面に押し付けられて前記ボビンの残糸を把持する把持状態と、前記3以上の残糸把持爪が前記ボビンの外周面から離隔した離隔状態との間で前記残糸把持爪の状態を切り換える切換機構と、前記3以上の残糸把持爪を、前記ボビンの軸方向に等距離移動させる移動機構とを備えていることを特徴とする。
【0010】
本発明によると、把持状態の残糸把持爪をボビンの軸方向先端側に移動させることにより、ボビンの残糸を除去することができる。また、3以上の残糸把持爪をボビンの径方向に移動させることによってボビンに押し付けるため、残糸把持爪の移動量を適宜調整すれば、ボビンの径によらず残糸把持爪をボビンの外周面に押し付けることができる。さらに、残糸把持爪をボビンの径方向に移動させることによりボビンの外周面に押し付けているため、残糸把持部材がボビンの外周面を押し付ける力を大きくすることができ、ボビンの残糸を確実に除去することができる。
【0011】
第2の発明に係る残糸除去装置は、第1の発明に係る残糸除去装置において、前記切換機構は、前記3以上の残糸把持爪に対して共通に設けられた1つの駆動源と、前記駆動源の駆動力を、前記3以上の残糸把持爪の各々に伝達する伝達機構と、を備えていることを特徴とする。
【0012】
本発明によると、共通の駆動源により3以上の残糸把持爪をまとめてボビンの径方向に移動させるため、3以上の残糸把持爪を、均一にボビンに押し付けることができる。また、3以上の残糸把持爪に対して個別に駆動源を設ける場合よりも、装置の構成を簡単にすることができる。
【0013】
第3の発明に係る残糸除去装置は、第1又は第2の発明に係る残糸除去装置において、前記伝達機構は、前記3以上の残糸把持爪に対して共通に設けられており、前記駆動源の駆動力によって、前記ボビンの周方向に回動する回動部材と、前記3以上の残糸把持爪に対して個別に設けられており、前記回動部材が回動する力を、対応する残糸把持爪が前記ボビンの径方向に移動する力に変換する3以上のカム機構と、を備えていることを特徴とする。
【0014】
本発明によると、駆動源により共通の回動部材を回動させ、回動部材が回動する力を残糸把持爪に個別に設けられたカム機構により、残糸把持爪がボビンの径方向に移動する力に変換することにより、共通の駆動源を用いて3以上の残糸把持爪をまとめてボビンの径方向に移動させることができる。
【0015】
第4の発明に係る残糸除去装置は、第3の発明に係る残糸除去装置において、前記3以上のカム機構は、それぞれ、前記残糸把持爪に設けられており、前記ボビンの周方向に関して一方側にいくほど、前記ボビンの径方向外側にくるように延びた案内面と、前記回動部材に設けられており、前記案内面に当接する当接部材と、を備えていることを特徴とする。
【0016】
本発明によると、残糸把持爪の各々に対して、ボビンの周方向に関して一方側にいくほど、ボビンの径方向外側にくるように延びた案内面を設け、回動部材に案内面に当接する当接部材を設けることにより、回動部材が回動する力を、残糸把持爪がボビンの径方向に移動する力に変換するカム機構を形成することができる。
【0017】
第5の発明に係る残糸除去装置は、第2〜第4のいずれかの発明に係る残糸除去装置において、前記駆動源がエアシリンダであることを特徴とする。
【0018】
本発明によると、エアシリンダが残糸把持爪の駆動源となっているため、残糸把持爪をボビンに押し付けたときに、残糸把持爪がボビンから押し返されてボビンの径方向と外側に移動することがなく、残糸把持爪を確実にボビンに押し付けることができる。
【0019】
第6の発明に係る残糸除去装置は、第1〜第5のいずれかの発明に係る残糸除去装置において、前記残糸把持爪の、前記密着状態において前記ボビンの外周面と接触する部分が、弾性材料によって構成されていることを特徴とする。
【0020】
本発明によると、残糸把持爪のボビンの外周面との接触部分が弾性材料によって構成されているため、残糸把持爪を、大きな力でボビンの外周面に押し付けた状態でボビンの軸方向に移動させて残糸を除去した場合でも、ボビンの外周面が傷つくことがない。
【発明の効果】
【0021】
本発明によれば、把持状態の残糸把持爪をボビンの軸方向先端側に移動させることにより、ボビンの残糸を除去することができる。また、3以上の残糸把持爪をボビンの径方向に移動させることによってボビンに押し付けるため、残糸把持爪の移動量を適宜調整すれば、ボビンの径によらず残糸把持爪をボビンの外周面に押し付けることができる。さらに、残糸把持爪をボビンの径方向に移動させることによりボビンの外周面に押し付けているため、残糸把持部材がボビンの外周面を押し付ける力を大きくすることができ、ボビンの残糸を確実に除去することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施の形態に係る残糸除去装置の概略構成図である。
【図2】図1の残糸把持機構の平面図である。
【図3】図2において上側の基材を除いた図である。
【図4】図3においてさらに下側の基材を除いた図である。
【図5】図2〜図4における回動部材と3つの把持爪との位置関係を示す図である。
【図6】図4のVI−VI線断面図である。
【図7】図1を矢印VIIの方向から見た図である。
【図8】残糸抜き取り装置及びボビン押さえ装置を降下させた状態を示す図である。
【図9】図8の状態での残糸把持機構の図4相当の図である。
【図10】図8の状態での残糸把持機構の図5相当の図である。
【図11】ボビンから残糸を抜き取った直後の状態を示す図である。
【図12】筒状部材を回動させて、回収口を把持爪の下方に位置させた状態を示す図である。
【図13】把持爪が把持していた残糸を回収口に落下させているときの状態を示す図である。
【図14】把持爪により径の大きいボビンを把持している状態を示す図9相当の図である。
【発明を実施するための形態】
【0023】
次に、本発明の好適な実施の形態について説明する。図1に示すように、残糸除去装置1は、残糸抜き取り装置2、ボビン押さえ装置3、残糸回収装置4、糸有無センサ5、糸量センサ6などを備えている。
【0024】
残糸抜き取り装置2は、残糸把持機構11とエアシリンダ12(移動機構)とを備えている。残糸把持機構11は、図1〜図6に示すように、2枚の基材21、22、回動部材23、3つの把持爪ユニット24、回動アーム25、エアシリンダ26などを備えている。ただし、図6では、便宜上、回動アーム25については、後述する案内部材33が案内溝47の略中央部に位置しているときの状態(後述する図14の状態)での断面を示している。
【0025】
2枚の基材21、22は、金属材料からなる略円形の板状体であり、残糸抜き取り装置2により残糸Rが抜き取られる、上下方向を軸方向とするボビンBの上方に、上下に重なって配置されている。2枚の基材21、22のうち、上側(図2の紙面手前側)に配置された基材21には、その略中央部に略円形の貫通孔21aが形成されている。また、基材21には、その外周端と貫通孔21aとの間の部分に、それぞれが周方向に延びているとともに、周方向に間隔をあけて配置された3つのガイド孔21bが形成されている。また、基材21の図2における下側の端部は、径方向外側に突出した突出部21cとなっている。
【0026】
2枚の基材21、22のうち、下側(図2の紙面奥側)に配置された基材22には、貫通孔21a及び3つのガイド孔21bと重なる位置に、それぞれ、貫通孔21aとほぼ同形状の貫通孔22a、及び、ガイド孔21bとほぼ同じ形状のガイド孔22bが形成されている。
【0027】
回動部材23は、基材21と基材22との間の配置されており、基材21、22の周方向に延びて、3つのガイド孔21b及び3つのガイド孔22bと重なっている。また、回動部材23には、3つのガイド孔21b、及び、3つのガイド孔22bと重なる部分に、回動部材23を上下に貫通する3つの貫通部材31が取り付けられている。
いる。
【0028】
3つの貫通部材31は、ガイド孔21bを通って基材21を貫通しており、3つの貫通部材31のうち、真ん中の貫通部材31には、基材21よりも上方に位置するその上端部に、略円柱形状の嵌合ピン32が取り付けられている。また、3つの貫通部材31は、ガイド孔22bを通って基材22を貫通しており、基材22よりも下方に位置するその下端部に略円柱形状の案内部材33(当接部材)が設けられている。
【0029】
また、ガイド孔21b、22bを貫通するように延びた貫通部材31は、ガイド孔21b、22bに沿って、基材21、22の周方向に移動可能となっており、これにより、貫通部材31が取り付けられた回動部材23が、ボビンBの周方向に回動可能となっている。
【0030】
3つの把持爪ユニット24は、基材22の下方に、ボビンBの周方向に沿って配置されており、それぞれ、スライド部材41、把持爪取り付け部材42、把持爪43、バネ44などを備えている。スライド部材41は、基材22の周方向の両側から、基材22の下面に配置された2本のガイドレール46に挟まれており、ガイドレール46に沿ってボビンBの径方向に移動可能となっている。
【0031】
また、スライド部材41の上面には、案内溝47が形成されている。案内溝47は、上述の案内部材33の直径とほぼ同じ幅の溝であり、案内溝47に沿って延びた2つの側壁面が案内面47a、47bとなっている。また、案内溝47(案内面47a、47b)は、ボビンBの周方向に関して図3の反時計回り方向側の部分ほど(一方側にいくほど)、ボビンBの径方向に関して内側に位置するように延びている。案内溝47内には、上述の案内部材33が配置されており、案内部材33の外周面が、案内溝47の案内面47a、47bに当接している。
【0032】
把持爪取り付け部材42は、スライド部材41の下端部に取り付けられている。また、把持爪取り付け部材42には、ボビンBの径方向に関する内側の端部に把持爪支持部42aが設けられており、ボビンBの径方向に関する外側の端部にバネ取り付け部42bが設けられている。
【0033】
把持爪43は、把持爪支持部42aに、下側及び基材22の周方向に関する両側から支持されており、スライド部材41とは独立してボビンBの径方向に移動可能となっている。また、把持爪43には、基材22の径方向に関する内側の端部に、ウレタンなどの弾性材料からなる弾性部43aが設けられている。なお、把持爪43の弾性部43a以外の部分は、例えば、金属材料などによって構成されている。
【0034】
バネ44は、バネ取り付け部42bと把持爪43との間に配置されており、その両端が、それぞれ、バネ取り付け部42b及び把持爪43の弾性部43aと反対側の端部に取り付けられている。これにより、把持爪43はバネ44によって、ボビンBの径方向内側に付勢されている。
【0035】
回動アーム25は、金属材料などからなる、水平方向に延びた板状の部材であり、基材21の上面に配置されているとともに、その略中央部が、基材21の突出部21cに設けられた、鉛直方向に延びた回動軸61に回動自在に支持されている。また、回動アーム25の一方の端部には、回動アーム25を貫通する長孔62が形成されており、長孔62には上述の嵌合ピン32が嵌合している。
【0036】
また、回動アーム25の長孔62と反対側の端部は、基材21と重ならない位置まで延びており、エアシリンダ26のピストン26aに取り付けられている。これにより、エアシリンダ26を駆動して、ピストン26aに取り付けられた回動アーム25の端部を図2の左右方向に移動させることによって、回動アーム25を、回動軸61を中心に回動させることができる。
【0037】
また、残糸把持機構11は、上述の基材21及びエアシリンダ26が、それぞれ、取り付け部材67を介してエアシリンダ12のピストン12aに固定されることによって、エアシリンダ12に取り付けられている。エアシリンダ12は、残糸除去装置1の機台1aに固定されており、ピストン12aを昇降させることによって、残糸把持機構11を昇降させる。また、ピストン12aには、その上端部に発光素子72が設けられており、発光素子72は、エアシリンダ12の外部に向けて図1の左方に光を照射する。
【0038】
エアシリンダ12の図1における左側には、上下に並んだ状態で残糸除去装置1の機台1aに取り付けられた4つの受光素子73a〜73dが配置されている。受光素子73a〜73dは、発光素子72から照射された光を受光するものであり、ピストン12aが昇降して、発光素子72が受光素子73a〜73dと同じ高さにきたときに、それぞれ、発光素子72から照射された光を受光する。これにより、ピストン12aが受光素子73a〜73dに対応する高さにきたことを検出することができる。なお、受光素子73a〜73dが、それぞれ、どのような高さに配置されているかについては、後程説明する。
【0039】
ボビン押さえ装置3は、押さえ部材81とエアシリンダ82とを備えている。押さえ部材81は、残糸Rが除去されるボビンBのほぼ真上に配置された、基材21、22の貫通孔21a、22aよりも径の小さい略円柱形状の部材である。また、押さえ部材81の下面には、ボビンBの上端部が嵌合可能な略円形の凹部81aが形成されている。凹部81aは、テーパ状になっており、上側の部分ほど径が小さくなっている。押さえ部材81は、エアシリンダ82のピストン82aに取り付けられており、エアシリンダ82は、ピストン82aを昇降させることによって押さえ部材81を昇降させる。
【0040】
残糸回収装置4は、筒状部材91、エアシリンダ92などを備えている。筒状部材91は、残糸の除去を行う前の状態(図1の状態)でほぼ鉛直方向に延びた筒状の部材であり、軸方向断面が略矩形となっている。また、筒状部材91の内部空間は、残糸Rを回収するための残糸回収経路91aとなっており、残糸回収経路91aの上端が、残糸Rを残糸回収経路91aに導入するための回収口91bとなっている。一方、残糸回収経路91aの下端は、図示しない負圧源に接続されている。これにより、残糸回収装置4においては、回収口91bから残糸回収経路91aに導入された残糸Rを吸引することができるようになっている。
【0041】
また、筒状部材91は、その下端部が、図1の紙面垂直方向に延びた回動軸93に回動自在に支持されているとともに、回動軸93よりも少し上の部分にエアシリンダ92のピストン92aが取り付けられている。エアシリンダ92は、機台1aに取り付けられており、ピストン92aを移動させることによって、筒状部材91を、回動軸93を中心に回動させる。
【0042】
糸有無センサ5は、ボビンBにおける残糸Rの有無検出するためのセンサである。糸量センサ6は、糸有無センサ5により残糸Rが検出されたボビンBにおける残糸Rの量が所定量以上であるか否かを検出するためのセンサである。
【0043】
より詳細に説明すると、図1、図7に示すように、残糸把持機構11の2枚の基材21、22、回動部材23及び3つの把持爪ユニット24や、ボビン押さえ装置3の下方には、図7の上下方向に延びたレール101が設けられている。レール101は、一方の端部(図7における上端部)において処理ボビン供給経路102に接続されているとともに、他方の端部(図7における下端部)において処理ボビン排出経路103に接続されている。レール101、処理ボビン供給経路102及び処理ボビン排出経路103は、トレイ100を走行させるためのものであり、ボビンBは、トレイ100の上端に、上下方向を軸方向とする直立した姿勢で支持されている。
【0044】
そして、レール101には、処理ボビン供給経路102から、図示しない自動ワインダーなどにおいて、糸の供給が完了して排出されたボビンBが供給される。また、後述するように、レール101から処理ボビン排出経路103にボビンBが排出される。
【0045】
糸有無センサ5は、上下方向に延びた回動軸5aを備えており、回動軸5aが、機台1aに取り付けられた取り付け部材104に回動可能に支持されている。また、糸有無センサ5は、平面視で回動軸5aとずれた位置において上下方向に延びた接触部5bを備えており、接触部5bが、レール101のうち、残糸把持機構11の基材21、22、回動部材23及び3つの把持爪ユニット24や、ボビン押さえ装備3のほぼ真下の残糸抜き取り位置(図7の一点鎖線で囲まれたボビンBの位置)よりも処理ボビン供給経路102側(図7の上側)の部分の近傍に配置されている。
【0046】
そして、レール101の当該部分を通過するボビンBに残糸Rがある場合には、残糸Rが接触部5bに接触し、これにより、糸有無センサ5が回動軸5aを中心に回動する。一方、残糸Rがない場合には、ボビンBは、接触部5bに接触しない。これにより、糸有無センサ5が回動軸5aを中心に回動するか否かによって、ボビンBにおける残糸Rの有無を検出することができる。
【0047】
そして、糸有無センサ5により、ボビンBにおいて残糸Rが検出された場合には、次に説明する、糸量センサ6による残糸Rの量の検出が行われる。一方、糸有無センサ5により、ボビンBにおいて残糸Rが検出されなかった場合には、次に説明する残糸Rの量の検出や、後述する残糸Rの抜き取りは行われず、当該ボビンBは、そのまま、処理ボビン排出経路103に排出され、ボビン搬送経路103からボビンBに糸を巻き取るための糸巻取装置に搬送される。
【0048】
糸量センサ6は、発光素子と受光素子とが隣接して配置された、いわゆる反射型の光学式センサであり、レール101の、上記残糸抜き取り位置よりもボビン供給流路102側(図7の上側)であり、且つ、糸有無センサ5が設けられた部分よりも処理ボビン排出経路103側(図7の下側)の部分に搬送されてきたボビンBのうち、糸有無センサ5により残糸Rが検出されたボビンBに向けて光を照射する。より詳細に説明すると、糸量センサ6は、ボビンBの下端部よりも少し上方に位置する部分に向けて、ボビンBとほぼ同じ色の光を照射する。なお、ボビンBの色は、糸の色とは異なっている(例えば、ボビンBの色が赤で、糸の色が白となっている)。
【0049】
このとき、ボビンBの残糸Rの量が多く、ボビンBの、糸量センサ6の発光素子から照射された部分に残糸Rがある場合には、糸量センサ6の発光素子から照射された光は、残糸Rに反射し、その反射光て糸量センサ6の受光素子に受光される。一方、ボビンBの残糸Rの量が少なく、ボビンBの、糸量センサ6の発光素子から照射された光よりも低い部分にしか残糸Rがない場合には、糸量センサ6の発光素子から照射された光は、ボビンBの外周面に当たるが、ボビンBの外周面では反射されないので、糸量センサ6の受光素子において光が受光されることはない。
【0050】
これにより、糸量センサ6においては、受光素子において上記反射光が受光されるか否かによって、ボビンBにおける残糸Rの量が所定量(発光素子から照射される光の高さに対応する量)以上であるか否かを検出することができる。
【0051】
そして、残糸Rの量が所定量よりも少ない場合には、ボビンBは、次に説明する残糸Rの抜き取りが行われた後に、処理ボビン排出経路103に送られ、処理ボビン排出経路103から、ボビンBに糸を巻き取るための糸巻取装置に搬送される。一方、残糸Rの量が所定量以上の場合には、残糸Rの抜き取りは行われず、そのまま処理ボビン排出経路103に送られ、処理ボビン排出経路103から自動ワインダーに戻され、自動ワインダーにおいて、当該ボビンから糸が供給される。
【0052】
次に、残糸除去装置1を用いて、ボビンBの残糸Rを除去する方法について説明する。ここで、以下に説明する残糸Rの除去は、上述したように、処理ボビン供給経路102からレール101に搬送されてきたボビンBのうち、糸有無センサ5により残糸Rが検出され、且つ、糸量センサ6により残糸Rの量が所定量以上であることが検出されなかったボビンBに対してのみ行われる。残糸Rの除去が行われるボビンBは、レール101に沿って、残糸把持機構11の基材21、22や、ボビン押さえ装置3のほぼ真下の残糸抜き取り位置まで搬送され、残糸Rが抜き取られるまでの間、その位置で静止する。
【0053】
一方、残糸抜き取り装置2においては、残糸Rの抜き取りを行う前の状態では、図2〜図5に示すように、回動部材23に設けられた3つの案内部材33が、それぞれ、対応する把持爪ユニット24の案内溝47のうち、基材21、22の径方向に関して最も内側に位置する一方の端部の近傍に位置しており、把持爪43の先端部に設けられた弾性部43aは、基材21、22の径方向に関して、ボビンBの外周面よりも外側に位置している。なお、このように、3つの把持爪43がボビンBの径方向に関してボビンBの外周面から離隔している状態が、本発明に係る離隔状態に相当する。
【0054】
また、エアシリンダ12においては、ピストン12aが、発光素子72が受光素子73aとほぼ同じ高さに位置している。このとき、残糸把持機構11は、ボビンBの上端よりも上方に位置している。すなわち、受光素子73aは、残糸把持機構11がボビンBの上端よりも上方のある高さに位置しているときの、発光素子72と同じ高さに設けられている。
【0055】
また、ボビン押さえ装置3においては、押さえ部材81が、ボビンBの上端よりも上方に位置している。また、残糸回収装置4においては、図1に示すように、筒状部材91がほぼ直立した姿勢となっており、機台1aの内部に収まっている。これにより、筒状部材91が、レール101におけるボビンBの搬送の邪魔になったり、ボビンBを上記残糸抜き取り位置に配置することができなくなったりすることがない。
【0056】
そして、残糸Rを除去すべきボビンBが、上記残糸抜き取り位置に搬送されてくると、エアシリンダ12を駆動して、図8に矢印A1で示したように、ピストン12aを、発光素子72が受光素子73dとほぼ同じ高さになるまで降下させる。このとき、残糸把持機構11は、把持爪43(把持爪ユニット24)がボビンBの下端部とほぼ同じ高さにくるまで降下する。すなわち、受光素子73dは、把持爪43がボビンBの下端部とほぼ同じ高さに位置しているときの発光素子72とほぼ同じ高さに設けられている。
【0057】
また、このとき、基材21、22には、上述したように、その略中央部に貫通孔21a、22aが形成されているため、残糸把持機構11を降下させたときに、ボビンBは貫通孔21a、22aを通過する。したがって、ボビンBが、残糸把持機構11と接触してしまうことがない。
【0058】
さらに、残糸把持機構11の降下とほぼ同時に、図8に矢印A2で示したように、ボビン押さえ装置3において、エアシリンダ82を駆動して、押さえ部材81を、凹部81aがボビンBの上端部に嵌合する位置まで降下させる。
【0059】
次に、残糸把持機構11において、エアシリンダ26を駆動して、図9に矢印A3で示したように、ピストン26aを伸ばすことにより、矢印A4に示したように、回動アーム25を、図の反時計回り方向に回動させる。すると、回動軸61を挟んでピストン26aと反対側に位置する、回動アーム25の長孔62が形成された部分が、矢印A5で示したように図中左方に移動する。これにより、長孔62に嵌合された嵌合ピン32と嵌合ピン32が取り付けられた貫通部材31がガイド孔21b、22bに沿って、図9の時計回り方向に移動する。これに伴って、残り2つの貫通部材31も、ガイド孔21b、22bに沿って図9の時計回り方向に移動し、3つの貫通部材31の移動によって、回動部材23が、矢印A6で示したように図9の時計回り方向に回動する。
【0060】
回動部材23がこのように回動すると、回動部材23に設けられた3つの案内部材33が、それぞれ、図10に矢印A7a〜A7cで示したように、対応する把持爪ユニット24(スライド部材41)の案内溝47(案内面47a、47b)に沿って、案内溝47の基材21、22の径方向に関して外側に位置する他方の端部の近傍まで移動する。
【0061】
このとき、3つの貫通部材31がガイド孔21b、22bに挿通されているため、案内部材33は、基材21、22の径方向には移動できない。そのため、3つの把持爪ユニット24(スライド部材41)が、図9に矢印A8a〜A8cで示したように、ガイドレール46に沿ってボビンBの径方向内側に移動し、把持爪43の先端部に設けられた弾性部43aが、ボビンBの外周面に押し付けられる。また、このとき、把持爪43は、バネ44によってボビンBの径方向内側に付勢されているため、把持爪43の弾性部43aは、ボビンBの外周面に密着する。そして、これにより、3つの把持爪43によってボビンBの残糸Rが把持される。なお、このように3つの把持爪43がボビンBの外周面に押し付けられている状態が、本発明に係る把持状態に相当する。
【0062】
ここで、本実施の形態では、案内部材33と案内溝47とを合わせたものが、回動部材23が回動する力を、把持爪ユニット24がボビンの径方向に移動する力に変換する、本発明に係るカム機構に相当する。また、このカム機構と、回動部材23及び回動アーム25とを合わせたものが、エアシリンダ26の駆動力を、3つの把持爪ユニット24に伝達する、本発明に係る伝達機構に相当する。そして、この伝達機構とエアシリンダ26とを合わせたものが、3つの把持爪43がボビンBの外周面に押し付けられて残糸Rを把持する把持状態(図8の状態)と、3つの把持爪43がボビンBの外周面から離隔した離隔状態(図4の状態)とを切り換える、本発明に係る切換機構に相当する。
【0063】
次に、この状態で、エアシリンダ12を駆動して、ピストン12aを、発光素子72が受光素子73cと同じ高さがにくるまで上昇させる。このとき、残糸把持機構11は、把持爪43がボビンBの途中のある部分と同じ高さまで上昇する。すなわち、受光素子73cは、把持爪43がボビンBの途中のある部分と同じ高さとなったときの、発光素子72とほぼ同じ高さに配置されている。
【0064】
そして、この残糸把持機構11の上昇により、把持爪43に把持されたボビンBの残糸Rは、ボビンBの軸方向に沿って上方に持ち上げられる。このとき、ボビンBの上端が押さえ部材81によって押さえられているため、ボビンBが残糸Rと一緒に持ち上げられてしまうことはない。
【0065】
次に、エアシリンダ26を駆動して3つの把持爪43をボビンBの径方向外側に移動させることにより、上記離隔状態(図2〜図4の状態)に戻してから、上述したのと同様、エアシリンダ12により、残糸把持機構11を図8に示す位置まで降下させる。続いて、上述したのと同様、エアシリンダ26を駆動して3つの把持爪43をボビンBの径方向内側に移動させることにより、上記把持状態(図9の状態)とし、この状態で、エアシリンダ12を駆動して、残糸把持機構11を上昇させて、ボビンBの残糸Rを持ち上げる。
【0066】
ただし、このときには、ピストン12aを、発光素子72が受光素子73bと同じ高さにくるまで上昇させる。このとき、残糸把持機構11は、把持爪43がボビンBの途中の前回の上昇時よりも高い位置にくるまで上昇する。すなわち、受光素子73bは、受光素子73cよりも少し上方に配置されている。
【0067】
次に、再度、上記離隔状態に戻してから、上述したのと同様、エアシリンダ12により、残糸把持機構11を図8に示す位置まで降下させる。続いて、再度、上記把持状態としてから、エアシリンダ12を駆動して、図11に矢印A9に示したように、ピストン12aを、発光素子72が受光素子73aと同じ高さにくるまで上昇させる。これにより、残糸把持機構11は、把持爪43(把持爪ユニット24)がボビンBよりも上方の位置まで上昇する。
【0068】
さらに、このとき、把持爪43がボビンBの上端部と同じ高さにきたタイミングで、図11に矢印A10で示したように、エアシリンダ82を駆動して、押さえ部材81をボビンBの上端よりも上方まで上昇させる。
【0069】
これにより、ボビンBの残糸Rは、残糸把持機構11に持ち上げられることによってボビンBから抜き取られ、ボビンBの上方において、3つの把持爪43によって把持される。また、このとき、上述したように、把持爪43の上昇と降下を繰り返すことにより、ボビンBの残糸Rを、少しずつ上方に持ち上げた後にボビンBから抜き取るため、ボビンBから確実に残糸Rを抜き取ることができる。
【0070】
次に、残糸Rが抜き取られたボビンBが、レール101から処理ボビン排出経路103に向けて搬送されてから、エアシリンダ92を駆動して、図12に矢印A11で示したように、筒状部材91を図の時計回り方向に回動させることによって、筒状部材91を、回収口91bが把持爪ユニット24のほぼ真下にくるまで傾ける。続いて、上記離隔状態に戻すことにより、把持爪43による残糸Rの把持を解除してから、図13に矢印A12で示したように、押さえ部材81を自重で降下させる。
【0071】
すると、押さえ部材81が、貫通孔21a、22a及び3つの把持爪43に囲まれた領域を通過して、3つの把持爪43よりも下方まで降下し、このとき、3つの把持爪43による把持が解舒された残糸Rが、押さえ部材81によって下方に押されて落下する。そして、落下した残糸Rが、回収口91bから残糸回収経路91aに導入されて吸引される。
【0072】
この後、エアシリンダ82により押さえ部材81を上昇させるとともに、エアシリンダ92を駆動して、筒状部材91を図1の反時計回り方向に回動させることにより、図1の状態に戻す。そして、以下、同様にして、残糸抜き取り位置に搬送されてきたボビンBの残糸Rの除去が順次行われる。
【0073】
以上に説明した実施の形態によると、ボビンBの径方向に移動可能な3つの把持爪43の弾性部43aをボビンBの外周面に押し付けて、ボビンBの残糸Rを把持するため、ボビンBの径によらず、ボビンBの残糸Rを把持することが可能となる。
【0074】
より詳細に説明すると、図4などに示すボビンBものよりも径の大きいボビンBの外周面に把持爪43を押し付けて当該ボビンBの残糸Rを把持する場合には、図14に示すように、エアシリンダ26におけるピストン26aの移動量を、図8の場合よりも小さくする。これにより、回動アーム25及び回動部材23の回動角度が図8に示す場合よりも小さくなり、把持爪43のボビンBの径方向内側への移動量を小さくなる。そして、このように、ボビンBの径に応じて、ピストン26aの移動量を調整すれば、ボビンBの径によらず、把持爪43をボビンBの外周面に押し付けてボビンBの残糸Rを把持することができる。
【0075】
また、このとき、上述したように、押さえ部材81の凹部81aがテーパ状になっているため、ボビンBの径が異なる場合でも、ボビンBの上端部を凹部81aに嵌合させることが可能である。
【0076】
また、ボビンBの径方向に移動可能な3つの把持爪43の弾性部43aをボビンBの外周面に押し付けて、ボビンBの残糸Rを把持するため、把持爪43を大きな力でボビンBの外周面に押し付けることができ、ボビンBの残糸Rを確実に把持することができる。
【0077】
また、エアシリンダ26を駆動すると、エアシリンダ26の駆動力によって3つの把持爪43に対して共通に設けられた回動部材23が回動し、回動部材23の回動が、案内部材33と案内溝47(案内面47a、47b)とによって、3つの把持爪ユニット24をボビンBの径方向に移動させる力に変換されるため、3つの把持爪43(把持爪ユニット24)に共通に設けられたエアシリンダ26を駆動すれば、3つの把持爪43が同時にボビンBの径方向に移動する。したがって、3つの把持爪43を均一にボビンBの外周面に押し付けることができる。また、3つの把持爪43に対して個別にエアシリンダなどの駆動源を設ける場合よりも、装置の構成を簡単にすることができる。
【0078】
また、3つの把持爪ユニット24をボビンBの径方向に移動させるための駆動源が、エアシリンダ26であるため、把持爪43がボビンBの外周面に押し付けられたときに、把持爪ユニット24がボビンBに押し返されて、ボビンBの径方向外側に移動してしまうことがない。したがって、把持爪43を確実にボビンの外周面に押し付けることができる。
【0079】
また、ボビンBの外周面に接触する把持爪43の先端部に、弾性材料からなる弾性部43aが設けられているため、把持爪43が大きな力でボビンBの外周面に押し付けられた状態で把持爪43を上昇させても、ボビンBの外周面が傷ついてしまうことがない。
【0080】
次に、本実施の形態に種々の変更を加えた変形例について説明する。ただし、本実施の形態と同様の構成については、適宜その説明を省略する。
【0081】
上述の実施の形態では、3つの把持爪ユニット24に対して共通に設けられた回動部材23が回動する力を、案内部材33と案内溝47とによって、3つの把持爪43がボビンBの径方向に移動する力に変換したが、これには限られない。すなわち、案内部材33及び案内溝47以外のカム機構によって、回動部材23が回動する力を3つの把持爪ユニット24がボビンBの径方向に移動する力に変換してもよい。
【0082】
さらには、回動部材23が回動する力を、カム機構によって、3つの把持爪43がボビンBの径方向に移動する力に変換することにも限られない。すなわち、エアシリンダ26の駆動力を、別の伝達機構で3つの把持爪43に伝達することによって、3つの把持爪43を、ボビンBの径方向に移動させてもよい。
【0083】
また、把持爪43を移動させるための駆動源は、エアシリンダ26であることにも限られず、油圧シリンダやモータなど、エアシリンダ以外の駆動源を用いてもよい。
【0084】
また、上述の実施の形態では、3つの把持爪43に対して1つのエアシリンダ26が設けられていたが、3つの把持爪43に対して個別にエアシリンダなどの駆動源が設けられていてもよい。
【0085】
また、上述の実施の形態では、把持爪43のボビンBとの接触部分である先端部に、弾性材料からなる弾性部43aが設けられていたが、これには限られない。例えば、把持爪43は、全体が金属材料によって構成されているなど、ボビンBの外周面との接触部分を含む部分が金属材料など弾性材料以外の材料によって構成されていてもよい。
【0086】
また、上述の実施の形態では、ボビンBの周方向に沿って配置された3つの把持爪43によってボビンBの残糸Rを把持したが、ボビンBの周方向に沿って配置された4つ以上の把持爪43によってボビンBの残糸Rを把持してもよい。
【符号の説明】
【0087】
1 残糸除去装置
12 エアシリンダ
23 回動部材
25 回動アーム
26 エアシリンダ
33 案内部材
43 把持爪
43a 弾性部
47 案内溝
【特許請求の範囲】
【請求項1】
残糸が除去されるボビンの周方向に沿って配置されているとともに、前記ボビンの径方向に移動可能となった、残糸を把持するための3以上の残糸把持爪と、
前記3以上の残糸把持爪を前記ボビンの径方向に移動させることによって、前記3以上の残糸把持爪が前記ボビンの外周面に押し付けられて前記ボビンの残糸を把持する把持状態と、前記3以上の残糸把持爪が前記ボビンの外周面から離隔した離隔状態との間で前記残糸把持爪の状態を切り換える切換機構と、
前記3以上の残糸把持爪を、前記ボビンの軸方向に等距離移動させる移動機構とを備えていることを特徴とする残糸除去装置。
【請求項2】
前記切換機構は、
前記3以上の残糸把持爪に対して共通に設けられた1つの駆動源と、
前記駆動源の駆動力を、前記3以上の残糸把持爪の各々に伝達する伝達機構と、を備えていることを特徴とする請求項1に記載の残糸除去装置。
【請求項3】
前記伝達機構は、
前記3以上の残糸把持爪に対して共通に設けられており、前記駆動源の駆動力によって、前記ボビンの周方向に回動する回動部材と、
前記3以上の残糸把持爪に対して個別に設けられており、前記回動部材が回動する力を、対応する残糸把持爪が前記ボビンの径方向に移動する力に変換する3以上のカム機構と、を備えていることを特徴とする請求項2に記載の残糸除去装置。
【請求項4】
前記3以上のカム機構は、それぞれ、
前記残糸把持爪に設けられており、前記ボビンの周方向に関して一方側にいくほど、前記ボビンの径方向外側にくるように延びた案内面と、
前記回動部材に設けられており、前記案内面に当接する当接部材と、を備えていることを特徴とする請求項3に記載の残糸除去装置
【請求項5】
前記駆動源がエアシリンダであることを特徴とする請求項2〜4のいずれかに記載の残糸除去装置。
【請求項6】
前記残糸把持爪の、前記密着状態において前記ボビンの外周面と接触する部分が、弾性材料によって構成されていることを特徴とする請求項1〜5のいずれかに記載の残糸除去装置。
【請求項1】
残糸が除去されるボビンの周方向に沿って配置されているとともに、前記ボビンの径方向に移動可能となった、残糸を把持するための3以上の残糸把持爪と、
前記3以上の残糸把持爪を前記ボビンの径方向に移動させることによって、前記3以上の残糸把持爪が前記ボビンの外周面に押し付けられて前記ボビンの残糸を把持する把持状態と、前記3以上の残糸把持爪が前記ボビンの外周面から離隔した離隔状態との間で前記残糸把持爪の状態を切り換える切換機構と、
前記3以上の残糸把持爪を、前記ボビンの軸方向に等距離移動させる移動機構とを備えていることを特徴とする残糸除去装置。
【請求項2】
前記切換機構は、
前記3以上の残糸把持爪に対して共通に設けられた1つの駆動源と、
前記駆動源の駆動力を、前記3以上の残糸把持爪の各々に伝達する伝達機構と、を備えていることを特徴とする請求項1に記載の残糸除去装置。
【請求項3】
前記伝達機構は、
前記3以上の残糸把持爪に対して共通に設けられており、前記駆動源の駆動力によって、前記ボビンの周方向に回動する回動部材と、
前記3以上の残糸把持爪に対して個別に設けられており、前記回動部材が回動する力を、対応する残糸把持爪が前記ボビンの径方向に移動する力に変換する3以上のカム機構と、を備えていることを特徴とする請求項2に記載の残糸除去装置。
【請求項4】
前記3以上のカム機構は、それぞれ、
前記残糸把持爪に設けられており、前記ボビンの周方向に関して一方側にいくほど、前記ボビンの径方向外側にくるように延びた案内面と、
前記回動部材に設けられており、前記案内面に当接する当接部材と、を備えていることを特徴とする請求項3に記載の残糸除去装置
【請求項5】
前記駆動源がエアシリンダであることを特徴とする請求項2〜4のいずれかに記載の残糸除去装置。
【請求項6】
前記残糸把持爪の、前記密着状態において前記ボビンの外周面と接触する部分が、弾性材料によって構成されていることを特徴とする請求項1〜5のいずれかに記載の残糸除去装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−67453(P2013−67453A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205726(P2011−205726)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]