
毛管電気泳動装置のための光学的整合装置
【課題】 集束放射線ビームを多毛管電気泳動装置における各毛管の中心に早く自動的に合わせること。
【解決手段】 保持手段で実質的に固定位置に保持されたアレーの複数の毛管において、該複数の毛管のそれぞれを整合させる装置であって、電磁放射線を発生する発生手段と、前記毛管のそれぞれと個々に相互作用する電磁放射線を前記毛管に向けて、前記アレーの軸線に直交する経路に沿うとともに前記アレーを横切って前記毛管を連続的に走査させる電磁放射線指向手段と、相互作用した前記電磁放射線を検出する検出手段とを含み、前記電磁放射線は、前記毛管のそれぞれと個別に相互作用を行って、可変強度放射線パターンを生じさせ、前記検出手段は、前記経路に沿った位置と、前記経路から離れた位置とから選択される位置で、かつ、前記発生手段から見てアレーの後方の位置に配置されており、前記検出手段は該検出手段と前記毛管との間に配置されたスリットを有する、装置。
【解決手段】 保持手段で実質的に固定位置に保持されたアレーの複数の毛管において、該複数の毛管のそれぞれを整合させる装置であって、電磁放射線を発生する発生手段と、前記毛管のそれぞれと個々に相互作用する電磁放射線を前記毛管に向けて、前記アレーの軸線に直交する経路に沿うとともに前記アレーを横切って前記毛管を連続的に走査させる電磁放射線指向手段と、相互作用した前記電磁放射線を検出する検出手段とを含み、前記電磁放射線は、前記毛管のそれぞれと個別に相互作用を行って、可変強度放射線パターンを生じさせ、前記検出手段は、前記経路に沿った位置と、前記経路から離れた位置とから選択される位置で、かつ、前記発生手段から見てアレーの後方の位置に配置されており、前記検出手段は該検出手段と前記毛管との間に配置されたスリットを有する、装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広くは、多毛管分析装置に使用する光学検出装置に関する。より詳しくは、本発明は、集合的に毛管アレーを形成する多数の毛管の各中心に電磁ビームを自動的に位置合わせする整合装置に関する。
【背景技術】
【0002】
電気泳動分離技術は、分子の有効電荷の差により及び(又は)分子の大きさの差により分子を分離するために数十年間利用されてきた。最近に至るまでは、電気泳動分離は、代表的にはポリアクリルアミドのゲル材料から成るイン・ゲル・スラブ又はオープン・ゲル・ベッドにおいて行われてきた。さらに最近では、光度検出法と結びついた毛管電気泳動技術が、分子の自動高速の量的分析を可能にした。異なる有効電荷を有する分子の高分解分離は、緩衝剤充填の又はゲル充填の細い毛管に電気泳動原理を応用することによって達成された。
【0003】
代表的には、毛管電気泳動に使用される毛管カラムは、25〜200μmの直径を及び約10〜200cmの長さを有する石英管から成る。緩衝剤及びゲル分離媒質はカラム内部に直接的にポンプ圧送され、分析試料はカラムの一端に移動され、電場がカラムに及ぼされる。カラム内に詰められた化学種は、電場の影響下で電気泳動移動度に依る速度で移動する。毛管電気泳動は、ペプチド、たんぱく質、オリゴヌクレオチド、核酸及び他の詰められた分子種を含む多数の分子のタイプを分離するために使用されている。電気泳動分離技術の分野は、毛管電気泳動法を使用して分離しかつ検出することができる分子のタイプ及び大きさに関して連続的に拡大しつつある。
【0004】
毛管電気泳動の長所は数多くある。量的な情報が大きさが非常に小さい試料によって得られ、消費するゲル又は緩衝剤の量が非常に小さい。さらに、分離に必要な時間は、それ自体オートメーション、電子データ蓄積及び電子データ操作を与えるスラブ・ゲル技術に比べて著しく減ぜられる。
【0005】
最近、レーザー励起蛍光(LIF)検出器と毛管電気泳動装置(CE−LIF)との結合が、毛管電気泳動の検出感度を著しく改善した。これは、毛管内に蛍光的に付け札を付けられた分子の微小量の検出を可能にする。毛管電気泳動、特にCE−LIF技術は、高速自動化分離及び物質の微量検出のために提供されるので、微小モル濃度の検体を含むわずかな量の試料に適用する分離分析技術として特に注目されている。伝統的な毛管電気泳動装置に関しての欠点は、その全部の試料処理量である。伝統的なスラブ・ゲル電気泳動装置は比較的長い運転時間を要するが、各スラブは多数の試料の分析を行うことができ、分離を良くする。例えば、代表的な電気泳動分離及び分析は、1つの試料にわずか15分、すなわち、4つの分離に1時間を要する。これに対して、スラブゲル分離は10の試料に適合し、1時間の運転時間、すなわち、10の分離に1時間を要する。
【0006】
全処理量の問題を処理するために、いくつかの多毛管電気泳動装置が提案された。その装置の1つは、特許文献1及び2に記載されている。特許文献3に記載されている他の装置は、リボン状に配置された一列の毛管カラムと、すべてのカラム中の検体を検出する1つの検出器とを用いる。このガルボスキャナーベースの検出装置において、ガルボメトリックスキャナーミラーはアレー中の各毛管に電磁放射線を連続的に向けるために、段階的に動かされる。最も高い検出感度及び最も効率的なデューティサイクルを達成するために、集束ビームが各毛管をその中心で照らし、呼び掛けることが望ましい。このことは、照射ビームがオン−センターを目標に定める時間を最大にし、また、該ビームがオフ−センターである時間を最少にする。
【特許文献1】米国特許第5,091,652号明細書
【特許文献2】米国特許第5,274,240号明細書
【特許文献3】米国特許願第08/429,406号明細書
【0007】
多毛管電気泳動装置の毛管はしばしば使用者に交換され、ゲル及び(又は)緩衝剤を換えることによって生じるわずかな温度変化又は圧力変動により運転が物理的に中断されるので、集束ビームを各毛管の中心に関して正確に合わせる能力は装置の作業を改善することになる。実際に、前走査位置合わせ段階における各電気放電運転に先立って、集束ビーム位置を各毛管の中心に早く自動的に合わせる能力は非常に望ましいものである。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、集束放射線ビームを多毛管電気泳動装置における各毛管の中心に自動的に合わせる整合装置を提供する。この自動整合装置は、使用者が毛管を交換することを可能にし、また、多毛管分析における感度及び精度を確かにする。
【課題を解決するための手段】
【0009】
したがって、オートメ化された光学的整合装置が、整合手順を経て、リボン状のアレーに配列された多数の毛管の各中心を決定する。このために、少なくとも1つの電磁放射線源が電磁放射線を発射するために設けられている。連続的で早いように、ガルボメトリックスキャナーはミラーを非常にわずかなステップ増加分動かし、電磁放射線レーザービームに毛管アレーの毛管を横切る走査をさせる。ビームは、毛管カラムのそれぞれと相互に作用し、発射し、透過し散乱した放射線の可変強度光線パターンを与える。走査中、適当に配置された検出器がミラー位置の関数として発射されたビームの強度を監視する。プロセッサーが、カラムの中心を打つビームを表す放射線強度を取り出し、毛管中心に対応するミラー位置を決定する。各カラム中心を打つビームに対応するスキャナーミラーの位置は、選択され、記憶される。その後、前走査が電磁源をカラム中心に光学的に位置合わせするので、プロセッサーは走査ミラーを制御し、カラムの中心からカラムの中心へビームを非常に速く段階的に走査する。こうして、中心から外れたオフ−センター位置にある各毛管の照射時間を最小にし、デューティサイクルを最適にし、感度を最大にする。有利なことには、検出が蛍光に基づく多毛管電気泳動装置において、本発明の装置は、励起及び発射の双方の感度を高める。
【発明を実施するための最良の形態】
【0010】
本発明は、毛管電気泳動分離装置に使用するオートメ化された光学的整合装置に向けられている。本発明は、限定的ではないが、蛍光、紫外線−可視、屈折率、熱光学吸収度及び縮退四波マッピングを含む光学に基づいた検出をする装置での使用に適している。蛍光検出は代表的には毛管電気泳動分離に続いて高感度検出を行うための選択方法であるので、好ましい実施例はレーザー源蛍光検出(CE−LIF)を利用する。本発明に従った操作は、透明又は半透明のカラム又は管の中心を決定することが必要である別の用途に使用できる。
【0011】
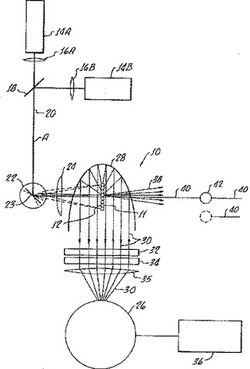
背景として、本発明による装置は、図1に全体的に示され、特許文献3において説明されたCE−LIF装置10と共に使用するのに適している。広くは、分析のための呼び掛けを行うために、CE−LIF装置10は、多数の毛管のアレー12における各毛管カラム11に収容された試料体積に呼び掛け電磁放射線を向けることを必要とする。代表的には、連続的にかつ繰り返して行われるが、実際に、本発明の装置は、多目的に使用でき、いかなる順でも、どの一本の毛管にも呼び掛けができる。蛍光の付け札を付けられた高分子は、電磁放射線の呼び掛けによって励起したとき、蛍光の付け札を付ける。その蛍光は、付け札を付けられた高分子の存在、濃縮及び位置決定のために集められ、検出される。
【0012】
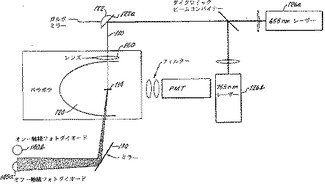
さらに図1を参照するに、検出のためのアレー12に電磁放射線を向けるために、CE−LIF装置10は、放射線発生手段として、一対のレーザー14A,14Bとして示されている、少なくとも1つか複数の電磁放射線源を含む。レーザー14Aは655nmの波長を発するダイオードレーザーであり、他方レーザー14Bは755nmの波長を発する。高分子の札付け次第で多数の電磁放射線源が、各毛管カラム11内の適当に札付けされた高分子の励起のために広範な波長を向けるために使用される。レーザー14A,14Bの出力は、共通の光路Aに沿ってレーザー14A,14Bからのビーム20を向けるように作用する、ダイクロイックミラーのようなビームコンバイナー18に向けてラインフルター16A,16Bを通過する。
【0013】
アレー12に呼びかけビーム20を向けるために、装置10は、ミラー23のようなリフレクタからなる放射線の指向手段を含むガルボメトリックスキャナー22を含む。このスキャナー22は、ジェネラル・スキャニング・オブ・キャリフォルニア社によって製造されたタイプのものである。スキャナー22は、有利なトルク対慣性比のために、早い動的応答性を有する精密、高速の電子機械装置である。スキャナー22への走査電圧の印加は、ミラー23を動かし、後に述べるように毛管アレー12を横切って走査するためにビーム20を反射する。
【0014】
スキャナー22においてビームは反射され、走査レンズ24を介して毛管アレー12に向けられる。図示の装置において、反射したビームは各毛管を照らし又は呼びかけ、蛍光放射線を発して適当に蛍光化合物を励起する。一対の電磁源、すなわち、レーザー14A,14Bが図1に示されており、アレー12の各毛管カラムの呼び掛けは、最初の1つの波長、すなわち、すべての毛管カラムのためのレーザー14Aから発せられるビームによって起こり、その後、同じ呼び掛けがレーザー14Bから発せられた反射ビームにより起こることが好ましい。実際に、すべての呼び掛け波長は、1つの走査において取り扱われる。
【0015】
カラム11により発せられたレーザー励起の蛍光放射線を収集しかつ蓄積するために、また、LIF検出器26に放射線を向けるために、CE−LIF装置10は、高い収集効率のパラボラコレクター28を含む。図1に示すように、毛管アレー12は、コレクター28の焦点の周りに配置されている。呼び掛けビームは、コレクター28の内部の開口(図示せず)を経て、レンズにより方向付けられる。呼び掛けられた各毛管カラムからの光線30として示された蛍光発光は、コレクター28により集められ、光電子増倍管又は他の適当な検出器である検出器26に向けられる。検出器26とアレー12との間に散乱バー32がアレー12の軸線と直交する面に配置されており、この面にあるカラム11を取り囲む強いレーザー散乱光を遮断する。1又は2以上のフィルター34も選択的に配置されており、線源からの放射線の散乱又はバックグラウンド励起を遮断し、毛管カラム11中の励起試料からの選択された発光蛍光の透過を可能にする。検出レンズ35は、光を検出器26に向ける。
【0016】
検出器26は、対応する付け札付きの高分子の存在及び濃縮を決定するために、全体に参照番号36で示されるプロセッサに対して、発射光線30の存在に応答して信号を発する。図1に示すように、アレー12は、同一面に平行に並んで配置された8本の毛管カラム11を含む。12本の又は他のいずれかの本数のカラム11がアレー12に配置されてもよい。毛管カラム11は石英ガラスにより作られ、その寸法は用途次第で変えられる。適当な毛管カラムの寸法は、毛管電気泳動法で使用されるものが代表的であり、20〜500cmの長さ、20〜500μmの直径を有する。毛管は、ほぼ50μmの比較的大きな壁厚を有する。カラム11は、カラム位置を固定するために、アレーベース上に手で一体に接着される。後に述べる目的のために、外径200μm及び内径100μmの毛管が、特に他の寸法を示さない限り、説明のために参照される。アレー12は、保持手段(図示せず)により毛管電気泳動装置10に交換可能に保持されている。高圧電源がアレー12に接続されており、各カラムはマニホルド(図示せず)に接続されている。マニホルドは、ゲル及び(又は)緩衝剤を含むことができる分離媒質を各毛管カラム11に高圧下で供給する。
【0017】
前記したように、分析感度を最大限にするために、また、呼び掛けビームがカラム中心外にある時間を最小限にすることにより最も効率的なデューティサイクルを与えるために、本発明は、呼び掛けビームをアレー12のカラムの各カラム中心に対して配置しかつ光学的に位置合わせする。
【0018】
本発明は、反射したビームが毛管のアレーを横切って走査されるとき、可変強度の光線パターンがそのアレーの後方位置において観察される、という発見に基づいている。有利にも、ビームが光線を横切って走査されるときのパターンの強度変化は、毛管カラムの中心位置を決定するために用いることができる。
【0019】
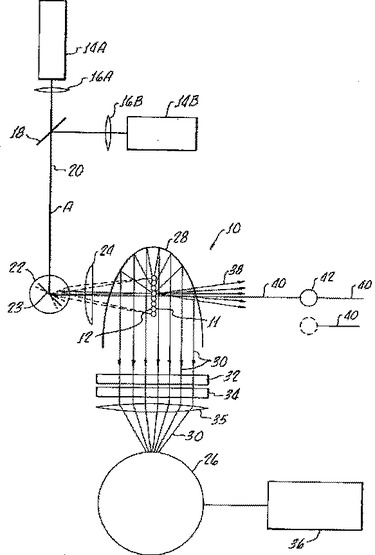
図2を参照するに、本発明に従って反射レーザービーム110を光学的に位置合わせする整合装置100が示されている。
【0020】
整合装置100は、毛管のアレー114を横切る反射ビーム110の走査中に生じた電磁放射線の可変強度パターン116を検出するための、アレー114の後方に配置された検出器112a(又は112b)を含む。検出器112a,112bは、発射されたビームの波長範囲内の検出された電磁放射線に適しているいずれかのタイプのものである。フォトダイオードが簡単で好ましく、また、取扱いが容易である。
【0021】
光線114の中心を経る反射ビームの経路は、中心軸線120を定義する。図2に示すように、検出器112a,112bは、(検出器112aの位置で示される)オン−軸線120又は(検出器112bの位置で示される)オフ−軸線120の位置に配置することができる。後に説明するように、検出器は、最善の結果を得るために、アレー114の後方及びオフ−軸線120上の位置に配置することが好ましい。最も好ましい具体例において、検出器112bは、毛管アレー114の後方130mm、オフ−軸線120から20mmの位置にある。
【0022】
検出器112a,112bと協同するために、ガルボメトリックスキャナー122及び関連するスキャナミラー122aは、スキャナー122に電圧を印加するプロセッサ(図示せず)により制御される。印加された電圧は、スキャナミラーを急速に非常に小さな増加分動かし、ビーム110を反射させて、該ビーム110に集束レンズ150を通過させかつ毛管アレー114を横切って前後に走査させる。スキャナミラー122aのための位置センサー、例えば、キャパシタンス位置センサーが、ミラー122aの位置に対応するスキャナコントローラに信号を送る。ミラー122aの位置信号は、アレー144へのビーム110の各増分位置に対応する。
【0023】
図2に示した実施例及び採用した特別なガルボスキャナーによれば、スキャナー122に対する電圧で1.8mVのステップは、アレー114でのビーム位置における別々のステップに終わる。スキャナミラー122a及び集合的にアレー144を形成する毛管の位置決めに基づいて、スキャナー122に対する1.8mVのステップは、アレー144における7.75μm+0.6μmのステップに等しい。したがって、スキャナー122は、ステップ電圧を連続して印加することによってスキャナミラー122aを動かすことができ、または、スキャナー122は、適当な電圧の印加によりアレー144における別々の位置に位置決めることができる。
【0024】
図3を参照するに、反射したビーム110がアレー114の1つの毛管カラムを横切って走査する際に形成される代表的な電磁放射線可変強度パターンが示されている。可変強度パターンは、オン−軸線検出器112aの位置及びオフ−検出器112bの位置で表されている。ビーム110が毛管カラムから外れている場合、電磁放射線は最大強度のビームとして通過する。ビーム110が毛管カラムの壁を横切って走査する際、低強度の拡散パターンが表され、該パターンはビームが処理する強度で毛管カラムの中心に対して成長する。ビームがカラム中心にあるとき、透過した光線強度のパターンは対称的であり、その強度は中央部で大きく、縁部で拡散している。カラムの中心から動くと、放射線は毛管の壁により拡散されて透過するので、強度は低下する。最後に、ビームは、毛管とこれに隣接する毛管との間の位置を走査し、もう一つの最大強度の集束したビームとして検出される。
【0025】
検出された電磁放射線は、可変強度スペクトルを生じ、該スペクトルは各毛管中心での反射ビーム110に対応するスキャナー122の位置を決定するために有利に使用できる。各スキャナーの位置は印加される独自の電圧値を有するので、各カラム中心に関連する放射線パターンに対応する印加電圧と互いに関係があることにより、各カラム中心のためのスキャナーミラー位置を決定することができる。
【0026】
再び図3を参照するに、オン−軸線検出器112aは、ビームが毛管を外すとき、ビームがアレーを外すか又は毛管間にあるかのいずれかであるために、非常に強い狭い信号を観察する。検出器112aは、ビームが毛管壁に当たるとき、弱くて広い拡散信号を観察し、また、ビームが毛管中心を横切るとき、広い拡散パターンを横切る輝点を観察する。 本発明の他の実施例において、検出器はオフ−軸線(112b)にあり、レーザー軸線120の側方20mmに配置されている。図3に示すように、オフ−軸線検出器112bは、オン−軸線検出器により検出されるパターンに比較してわずかに異なるパターンを観察する。検出器112bは、レーザーが毛管を外すとき光を検出しないが、ビームが毛管中心を経て走査するとき強い輝点を検出する。オフ−軸線検出器112bは、カラム中心決定プロセスに対する高めた感度を与えるように配置されている。
【0027】
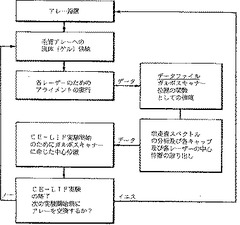
各アレー114の中心に対応するスキャナー122の位置を決定する方法は、図4に表で示したシーケンスを含む。図4に関連して図3を参照するに、アレー114がパラボラコレクター124の焦点に設置された後、プロセッサーは、レーザーN1 例えばレーザー源126aのための前走査段階を開始する。前走査中、ミラー122aを端位置に位置決めるためにスキャナー122に電圧を印加するシーケンスが開始される。その後、電圧が速やかにスキャナー122に印加され、反射されたビーム110をアレー114を前後に横切って走査するようにミラー122aを速やかに動かす。
【0028】
図5が示すのは、ビーム110がアレー114の各毛管を横切って前後に走査する際にオン−軸線検出器によって観察される強さのパターンのスペクトルである。また、図7が示すのは、ビーム120がアレー114の各毛管を横切って走査するときにオアフ−軸線検出器112bによって観察される強さのパターンの、同様なスペクトルである。検出器112aによって検出された強さに対応する信号がプロセッサーに送られる。前記したように、スキャナ−122の各ステップは、1.8mV及び7.7+/−0.6ミクロンの電圧入力に対応する。データファイルは、ガルボスキャナー又はミラー位置の関数として、検出器信号強さで発せられる。プロセッサーは、データを分析し、毛管カラムの中心の表示である検出器112aにより検出された電圧強さに対応するスキャナーミラー122aの位置を抽出する。この中心位置のデータは、電気泳動操作中、引き続くデータ収集において使用される。レーザー126aのための位置合わせ走査の終わりに、同じ位置合わせ走査が開始され、レーザー126b及びその後いずれかの付加的な線源のために実行される。
【0029】
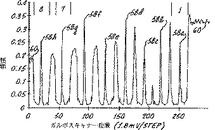
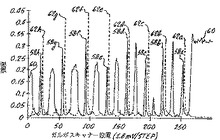
図5を参照するに、アレー144の後方に位置するオン−軸線検出器112aによって検出された、8つの毛管カラム(a〜h)を有するアレーのためのスキャナー122の位置に対する電磁放射線強度パターンが示されている。このパターンは、反射したビーム110が各カラムの中心を打つ時のスキャナーミラー122aの位置に対応する最大値58a〜58hを含む。図5のスペクトルの端の部分60は、ビームが完全にアレーを外した場合を示し、一方、カラム11のための最大値58a〜58h間の各ピークはビームが毛管間の区域を照らす時に受ける強い信号を示している。前走査位置合わせ中、ビームはアレー114aの端部を経過し、アレー114の端部を決定するように処理される端の部分60として示される非常に高い強度のピークを生じる。図6は、毛管58hを横切る走査中に得られた放射線強度パターンに対応する、図5の拡大部分を示している。
【0030】
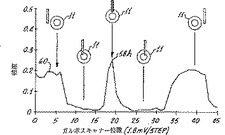
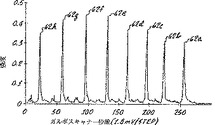
図7を参照するに、アレー144の後方に位置するオフ−軸線検出器112bによって検出された、8つの毛管カラム(a〜h)を有するアレーのためのスキャナー122の位置に対する電磁放射線強度パターンが示されている。走査中に造られた電磁放射線強度パターンは、わずかにカラム中心を外れて8つのカラム(a〜h)のカラム穴内にあるビーム位置の表示として、8つの別々の最大値62a〜62hを生じる。(図3及びオフ−軸線検出器により観察された光線パターン参照。)オフ−軸線検出器によって観察されたピークは、オン−軸線検出器が毛管中心を登録した後の数ステップまで最大値に達しない。これは、毛管の中心を経て伝達されるビーム110によって生じる輝点が、走査軸線を横切り、オフ−軸線検出器によって検出されるために、オン−軸線検出器に比較して数ステップを要するからである。オフ−軸線検出器が軸線から20mmは外れている図示の実施例においては、ステップの数は2である。この現象は、図5及び図7の強度パターンを重ね合わせた図であり、かつオン−軸線検出器及びオル−軸線検出器により検出された毛管中心間の外れを示す図8において明らかである。前記のとおり、実施例において、オン−軸線検出器112aにより観察された毛管中心は、検出器112bにより観察される最大値から4ステップ離れており、検出された最大値は破線で示されている。ガルボメトリックスキャナー及びミラー位置にとっての既知の情報並びに図5及び図7からの情報から、単一の毛管を横切って走査するために必要なミラー位置の数又はガルボスキャナーのステップ数、したがって、ミラーを1ステップ動かす際に走査される距離は既知である。さらに詳しくは、1.8mVの26ステップが、1つの毛管を横切ってガルボスキャナーを走査するために必要である。本実施例において、1つの毛管の幅は200%μmであり、したがって、1.8mVのステップは、7.7+/−0.6μmに等しい。したがって、2ステップの外れは約15.5ミクロンであり、4ステップの外れは約31μmである。
【0031】
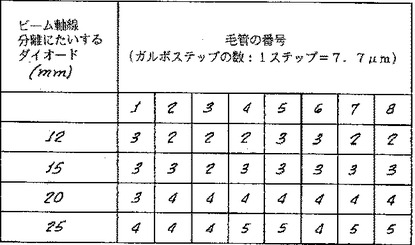
図5ないし図8のスペクトルから、オフ−軸線検出器112bによって観察される強度パターンは、毛管カラム中心の決定のためにより別々の最大強度(及びより単純なスペクトル)を与えることは明らかである。したがって、好ましい実施例において、検出器はオフ−軸線に配置される。20mmのオフ−軸線でも好ましく、当業者は、スキャナーミラーがアレーを横切るビームを向ける際に拡散しまた透過した電磁放射線のいずれの部分をも検出するように配置される適当な検出器が本発明の実際に従って使用できることを認めるであろう。図9は、多数の異なるオフ−軸線検出器位置で観察される実際の毛管中心から外れた多数のガルボスキャナーのステップを表にすることによって上記の概念を示したものである。例えば、アレーのNo.3の毛管の20mmのオフ−軸線検出器では、管中心からの外れは4ステップ又は約31μmである。検出器がオン−軸線位置からさらに遠くへ移動する際、外れは、25mmオフ−軸線の位置にある検出器に関連する外れによって示されるように増大する。図9に与えられる情報から明らかなように、毛管の内径及び外径は変化し、外れの量に変化をもたらす。
【0032】
いったん毛管中心が決定され、各電磁源の各毛管中心に対応するガルボスキャナー122aの位置が前記した自動位置合わせ法を行うことにより決定されると、図1の毛管電気泳動装置が前記した分析手順を行う準備が整う。すなわち、ビームは、毛管中の試料との相互作用のための電磁放射線を発するために、アレー12の各毛管カラムの前走査により決定した中心に向けられる。各毛管中心において、スキャナー22は、予め設定された時間、例えば15.7msec、その位置を保持し、その後、次のカラム中心にビーム20を向けるように位置決め電圧に応答して迅速に割り出す。このモードにおいて、焦点ビーム20は、高効率の試料の照明及び呼び掛けによって各毛管11の中心間を迅速に進められる。このデューサイクルは、プレセット間隔で各毛管中心にビームを保持することを含む。例えば、8つの毛管が2Hz の効果的な走査速度で監視される場合、ステップ200μm(100/200毛管の心心間距離)に対する時間は、400μsecであり、復帰走査時間は1msecであり、したがって、合計走査時間の99.24%が、データ収集が毛管中心で生じる場合、ドウェル時間として利用できる。
【0033】
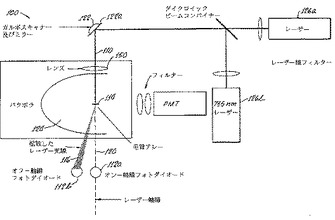
図10を参照するに、図2に示したと同様の要素を含む他の実施例が示されている。図10に示した実施例によれば、第2のミラー130が検出器140a,140bに電磁強度パターンを反射するために使用されている。図示のように、前記電磁強度パターンを得るために、反射軸線検出器140a又はオフ−軸線検出器140bの経路に配置されている。この実施例は、図1に示した構成が寸法又は配置上の制約から可能でない場合、適当な位置への検出器の配置を可能にする。本発明の装置は、図1に示す装置を使用する連続分析のための前走査位置合わせに利用される。しかし、本発明の自動位置合わせ装置は、いつでも利用でき、前走査に限られない。例えば、毛管カラムが高圧下でゲルを負荷されるとき、分析がゲル交換の直後に行われなくとも、位置合わせを位置合わせ確認のために開始することができる。
【0034】
前記した本発明の側面は、毛管のアレー又は水平な毛管列内における各毛管の並んだ整合に向けられている。図11に示した、垂直位置合わせ又はレーザービーム310の光路の位置合わせ、コレクションパラボラ380の焦点面、毛管アレーの毛管ウインドウ(図示せず)、光電増倍管検出器330を使用する。さらに詳しくは、毛管にレーザービーム310を焦点合わせする集束レンズ340の高さ、光電増倍管検出器330の高さ、パラボラ380の焦点面の高さ及び毛管ウインドウの高さは、これがすべて同一垂直面にあるように相互に整合される。垂直整合は、オン−軸線検出器360aの前部のスリット350a又はオフ−軸線検出器360bの前部のスリット350bを用いて行われる。線源370a又は線源370bからのレーザー放射線は、集束レンズ340及び毛管アレー320を経てオフ・スキャナーミラー390に向けられる。光線320を通過した後、ビームは、関係するスリット360a,360bを通過した後、検出器360a,360bのいずれかに反射される。検出器360a,360bのいずれかによって検出されたパターンが図12の側面図に示すようにスリットの形状を示すならば、そのときは、装置は垂直に整合されている。その形状が明瞭でないときは、パラボラ380の焦点面におけるアレー320にビームを適当に焦点合わせするために、モータ制御装置370を使用して集束レンズ340を動かす。このレンズは、適当な垂直高さを占めるまで調節される。
【図面の簡単な説明】
【0035】
【図1】本発明の1実施例にかかる多毛管光学装置を示す図。
【図2】本発明の装置における、オン−軸線検出器およびオフ−軸線検出器を示す図。
【図3】ビームが毛管カラムを横切って走査した際にオン−軸線検出器およびオフ−軸線検出器によって観察された電磁反射強度パターンを示す図。
【図4】カラム中心の決定のためのシーケンスを示すフロー・チャート。
【図5】放射線ビームが8つの毛管カラムのアレーを横切って走査した際にオン−軸線検出器によって観察された強度パターンのスペクトルを示す図。
【図6】図5に示された1つの毛管の拡大スペクトル図。
【図7】放射線ビームが8つの毛管アレーを横切って走査した際にオフ−軸線検出器によって観察された強度パターンのスペクトル図。
【図8】図5に示したオン−軸線検出器のスペクトルと図7に示したオフ−軸線検出器のスペクトルとを組合わせることによって得られた重ね合わせスペクトル図。
【図9】オフ−軸線検出器の位置と毛管の中心位置から外れたガルボスキャナーのステップ数を表す表。
【図10】本発明の他の実施例にかかる装置を示す図。
【図11】同一垂直面に光学素子、毛管及び検出器を整合させる装置を示す図。
【図12】図11に示した装置における整合検出器の全部に配置されたスリットの側面図。
【符号の説明】
【0036】
10 レーザー放射線蛍光検出装置(CE−LIF装置)
11 毛管カラム
12 多数の毛管カラム
14A、14B レーザー
20 放射線のビーム
22 スキャナー
23 ミラー(リフレクタ)
24 集束レンズ
26、112a、112b 検出器
28 パラボラコレクター
36 プロセッサー
116 可変強度光線パターン
350a、350b スリット
【技術分野】
【0001】
本発明は、広くは、多毛管分析装置に使用する光学検出装置に関する。より詳しくは、本発明は、集合的に毛管アレーを形成する多数の毛管の各中心に電磁ビームを自動的に位置合わせする整合装置に関する。
【背景技術】
【0002】
電気泳動分離技術は、分子の有効電荷の差により及び(又は)分子の大きさの差により分子を分離するために数十年間利用されてきた。最近に至るまでは、電気泳動分離は、代表的にはポリアクリルアミドのゲル材料から成るイン・ゲル・スラブ又はオープン・ゲル・ベッドにおいて行われてきた。さらに最近では、光度検出法と結びついた毛管電気泳動技術が、分子の自動高速の量的分析を可能にした。異なる有効電荷を有する分子の高分解分離は、緩衝剤充填の又はゲル充填の細い毛管に電気泳動原理を応用することによって達成された。
【0003】
代表的には、毛管電気泳動に使用される毛管カラムは、25〜200μmの直径を及び約10〜200cmの長さを有する石英管から成る。緩衝剤及びゲル分離媒質はカラム内部に直接的にポンプ圧送され、分析試料はカラムの一端に移動され、電場がカラムに及ぼされる。カラム内に詰められた化学種は、電場の影響下で電気泳動移動度に依る速度で移動する。毛管電気泳動は、ペプチド、たんぱく質、オリゴヌクレオチド、核酸及び他の詰められた分子種を含む多数の分子のタイプを分離するために使用されている。電気泳動分離技術の分野は、毛管電気泳動法を使用して分離しかつ検出することができる分子のタイプ及び大きさに関して連続的に拡大しつつある。
【0004】
毛管電気泳動の長所は数多くある。量的な情報が大きさが非常に小さい試料によって得られ、消費するゲル又は緩衝剤の量が非常に小さい。さらに、分離に必要な時間は、それ自体オートメーション、電子データ蓄積及び電子データ操作を与えるスラブ・ゲル技術に比べて著しく減ぜられる。
【0005】
最近、レーザー励起蛍光(LIF)検出器と毛管電気泳動装置(CE−LIF)との結合が、毛管電気泳動の検出感度を著しく改善した。これは、毛管内に蛍光的に付け札を付けられた分子の微小量の検出を可能にする。毛管電気泳動、特にCE−LIF技術は、高速自動化分離及び物質の微量検出のために提供されるので、微小モル濃度の検体を含むわずかな量の試料に適用する分離分析技術として特に注目されている。伝統的な毛管電気泳動装置に関しての欠点は、その全部の試料処理量である。伝統的なスラブ・ゲル電気泳動装置は比較的長い運転時間を要するが、各スラブは多数の試料の分析を行うことができ、分離を良くする。例えば、代表的な電気泳動分離及び分析は、1つの試料にわずか15分、すなわち、4つの分離に1時間を要する。これに対して、スラブゲル分離は10の試料に適合し、1時間の運転時間、すなわち、10の分離に1時間を要する。
【0006】
全処理量の問題を処理するために、いくつかの多毛管電気泳動装置が提案された。その装置の1つは、特許文献1及び2に記載されている。特許文献3に記載されている他の装置は、リボン状に配置された一列の毛管カラムと、すべてのカラム中の検体を検出する1つの検出器とを用いる。このガルボスキャナーベースの検出装置において、ガルボメトリックスキャナーミラーはアレー中の各毛管に電磁放射線を連続的に向けるために、段階的に動かされる。最も高い検出感度及び最も効率的なデューティサイクルを達成するために、集束ビームが各毛管をその中心で照らし、呼び掛けることが望ましい。このことは、照射ビームがオン−センターを目標に定める時間を最大にし、また、該ビームがオフ−センターである時間を最少にする。
【特許文献1】米国特許第5,091,652号明細書
【特許文献2】米国特許第5,274,240号明細書
【特許文献3】米国特許願第08/429,406号明細書
【0007】
多毛管電気泳動装置の毛管はしばしば使用者に交換され、ゲル及び(又は)緩衝剤を換えることによって生じるわずかな温度変化又は圧力変動により運転が物理的に中断されるので、集束ビームを各毛管の中心に関して正確に合わせる能力は装置の作業を改善することになる。実際に、前走査位置合わせ段階における各電気放電運転に先立って、集束ビーム位置を各毛管の中心に早く自動的に合わせる能力は非常に望ましいものである。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、集束放射線ビームを多毛管電気泳動装置における各毛管の中心に自動的に合わせる整合装置を提供する。この自動整合装置は、使用者が毛管を交換することを可能にし、また、多毛管分析における感度及び精度を確かにする。
【課題を解決するための手段】
【0009】
したがって、オートメ化された光学的整合装置が、整合手順を経て、リボン状のアレーに配列された多数の毛管の各中心を決定する。このために、少なくとも1つの電磁放射線源が電磁放射線を発射するために設けられている。連続的で早いように、ガルボメトリックスキャナーはミラーを非常にわずかなステップ増加分動かし、電磁放射線レーザービームに毛管アレーの毛管を横切る走査をさせる。ビームは、毛管カラムのそれぞれと相互に作用し、発射し、透過し散乱した放射線の可変強度光線パターンを与える。走査中、適当に配置された検出器がミラー位置の関数として発射されたビームの強度を監視する。プロセッサーが、カラムの中心を打つビームを表す放射線強度を取り出し、毛管中心に対応するミラー位置を決定する。各カラム中心を打つビームに対応するスキャナーミラーの位置は、選択され、記憶される。その後、前走査が電磁源をカラム中心に光学的に位置合わせするので、プロセッサーは走査ミラーを制御し、カラムの中心からカラムの中心へビームを非常に速く段階的に走査する。こうして、中心から外れたオフ−センター位置にある各毛管の照射時間を最小にし、デューティサイクルを最適にし、感度を最大にする。有利なことには、検出が蛍光に基づく多毛管電気泳動装置において、本発明の装置は、励起及び発射の双方の感度を高める。
【発明を実施するための最良の形態】
【0010】
本発明は、毛管電気泳動分離装置に使用するオートメ化された光学的整合装置に向けられている。本発明は、限定的ではないが、蛍光、紫外線−可視、屈折率、熱光学吸収度及び縮退四波マッピングを含む光学に基づいた検出をする装置での使用に適している。蛍光検出は代表的には毛管電気泳動分離に続いて高感度検出を行うための選択方法であるので、好ましい実施例はレーザー源蛍光検出(CE−LIF)を利用する。本発明に従った操作は、透明又は半透明のカラム又は管の中心を決定することが必要である別の用途に使用できる。
【0011】
背景として、本発明による装置は、図1に全体的に示され、特許文献3において説明されたCE−LIF装置10と共に使用するのに適している。広くは、分析のための呼び掛けを行うために、CE−LIF装置10は、多数の毛管のアレー12における各毛管カラム11に収容された試料体積に呼び掛け電磁放射線を向けることを必要とする。代表的には、連続的にかつ繰り返して行われるが、実際に、本発明の装置は、多目的に使用でき、いかなる順でも、どの一本の毛管にも呼び掛けができる。蛍光の付け札を付けられた高分子は、電磁放射線の呼び掛けによって励起したとき、蛍光の付け札を付ける。その蛍光は、付け札を付けられた高分子の存在、濃縮及び位置決定のために集められ、検出される。
【0012】
さらに図1を参照するに、検出のためのアレー12に電磁放射線を向けるために、CE−LIF装置10は、放射線発生手段として、一対のレーザー14A,14Bとして示されている、少なくとも1つか複数の電磁放射線源を含む。レーザー14Aは655nmの波長を発するダイオードレーザーであり、他方レーザー14Bは755nmの波長を発する。高分子の札付け次第で多数の電磁放射線源が、各毛管カラム11内の適当に札付けされた高分子の励起のために広範な波長を向けるために使用される。レーザー14A,14Bの出力は、共通の光路Aに沿ってレーザー14A,14Bからのビーム20を向けるように作用する、ダイクロイックミラーのようなビームコンバイナー18に向けてラインフルター16A,16Bを通過する。
【0013】
アレー12に呼びかけビーム20を向けるために、装置10は、ミラー23のようなリフレクタからなる放射線の指向手段を含むガルボメトリックスキャナー22を含む。このスキャナー22は、ジェネラル・スキャニング・オブ・キャリフォルニア社によって製造されたタイプのものである。スキャナー22は、有利なトルク対慣性比のために、早い動的応答性を有する精密、高速の電子機械装置である。スキャナー22への走査電圧の印加は、ミラー23を動かし、後に述べるように毛管アレー12を横切って走査するためにビーム20を反射する。
【0014】
スキャナー22においてビームは反射され、走査レンズ24を介して毛管アレー12に向けられる。図示の装置において、反射したビームは各毛管を照らし又は呼びかけ、蛍光放射線を発して適当に蛍光化合物を励起する。一対の電磁源、すなわち、レーザー14A,14Bが図1に示されており、アレー12の各毛管カラムの呼び掛けは、最初の1つの波長、すなわち、すべての毛管カラムのためのレーザー14Aから発せられるビームによって起こり、その後、同じ呼び掛けがレーザー14Bから発せられた反射ビームにより起こることが好ましい。実際に、すべての呼び掛け波長は、1つの走査において取り扱われる。
【0015】
カラム11により発せられたレーザー励起の蛍光放射線を収集しかつ蓄積するために、また、LIF検出器26に放射線を向けるために、CE−LIF装置10は、高い収集効率のパラボラコレクター28を含む。図1に示すように、毛管アレー12は、コレクター28の焦点の周りに配置されている。呼び掛けビームは、コレクター28の内部の開口(図示せず)を経て、レンズにより方向付けられる。呼び掛けられた各毛管カラムからの光線30として示された蛍光発光は、コレクター28により集められ、光電子増倍管又は他の適当な検出器である検出器26に向けられる。検出器26とアレー12との間に散乱バー32がアレー12の軸線と直交する面に配置されており、この面にあるカラム11を取り囲む強いレーザー散乱光を遮断する。1又は2以上のフィルター34も選択的に配置されており、線源からの放射線の散乱又はバックグラウンド励起を遮断し、毛管カラム11中の励起試料からの選択された発光蛍光の透過を可能にする。検出レンズ35は、光を検出器26に向ける。
【0016】
検出器26は、対応する付け札付きの高分子の存在及び濃縮を決定するために、全体に参照番号36で示されるプロセッサに対して、発射光線30の存在に応答して信号を発する。図1に示すように、アレー12は、同一面に平行に並んで配置された8本の毛管カラム11を含む。12本の又は他のいずれかの本数のカラム11がアレー12に配置されてもよい。毛管カラム11は石英ガラスにより作られ、その寸法は用途次第で変えられる。適当な毛管カラムの寸法は、毛管電気泳動法で使用されるものが代表的であり、20〜500cmの長さ、20〜500μmの直径を有する。毛管は、ほぼ50μmの比較的大きな壁厚を有する。カラム11は、カラム位置を固定するために、アレーベース上に手で一体に接着される。後に述べる目的のために、外径200μm及び内径100μmの毛管が、特に他の寸法を示さない限り、説明のために参照される。アレー12は、保持手段(図示せず)により毛管電気泳動装置10に交換可能に保持されている。高圧電源がアレー12に接続されており、各カラムはマニホルド(図示せず)に接続されている。マニホルドは、ゲル及び(又は)緩衝剤を含むことができる分離媒質を各毛管カラム11に高圧下で供給する。
【0017】
前記したように、分析感度を最大限にするために、また、呼び掛けビームがカラム中心外にある時間を最小限にすることにより最も効率的なデューティサイクルを与えるために、本発明は、呼び掛けビームをアレー12のカラムの各カラム中心に対して配置しかつ光学的に位置合わせする。
【0018】
本発明は、反射したビームが毛管のアレーを横切って走査されるとき、可変強度の光線パターンがそのアレーの後方位置において観察される、という発見に基づいている。有利にも、ビームが光線を横切って走査されるときのパターンの強度変化は、毛管カラムの中心位置を決定するために用いることができる。
【0019】
図2を参照するに、本発明に従って反射レーザービーム110を光学的に位置合わせする整合装置100が示されている。
【0020】
整合装置100は、毛管のアレー114を横切る反射ビーム110の走査中に生じた電磁放射線の可変強度パターン116を検出するための、アレー114の後方に配置された検出器112a(又は112b)を含む。検出器112a,112bは、発射されたビームの波長範囲内の検出された電磁放射線に適しているいずれかのタイプのものである。フォトダイオードが簡単で好ましく、また、取扱いが容易である。
【0021】
光線114の中心を経る反射ビームの経路は、中心軸線120を定義する。図2に示すように、検出器112a,112bは、(検出器112aの位置で示される)オン−軸線120又は(検出器112bの位置で示される)オフ−軸線120の位置に配置することができる。後に説明するように、検出器は、最善の結果を得るために、アレー114の後方及びオフ−軸線120上の位置に配置することが好ましい。最も好ましい具体例において、検出器112bは、毛管アレー114の後方130mm、オフ−軸線120から20mmの位置にある。
【0022】
検出器112a,112bと協同するために、ガルボメトリックスキャナー122及び関連するスキャナミラー122aは、スキャナー122に電圧を印加するプロセッサ(図示せず)により制御される。印加された電圧は、スキャナミラーを急速に非常に小さな増加分動かし、ビーム110を反射させて、該ビーム110に集束レンズ150を通過させかつ毛管アレー114を横切って前後に走査させる。スキャナミラー122aのための位置センサー、例えば、キャパシタンス位置センサーが、ミラー122aの位置に対応するスキャナコントローラに信号を送る。ミラー122aの位置信号は、アレー144へのビーム110の各増分位置に対応する。
【0023】
図2に示した実施例及び採用した特別なガルボスキャナーによれば、スキャナー122に対する電圧で1.8mVのステップは、アレー114でのビーム位置における別々のステップに終わる。スキャナミラー122a及び集合的にアレー144を形成する毛管の位置決めに基づいて、スキャナー122に対する1.8mVのステップは、アレー144における7.75μm+0.6μmのステップに等しい。したがって、スキャナー122は、ステップ電圧を連続して印加することによってスキャナミラー122aを動かすことができ、または、スキャナー122は、適当な電圧の印加によりアレー144における別々の位置に位置決めることができる。
【0024】
図3を参照するに、反射したビーム110がアレー114の1つの毛管カラムを横切って走査する際に形成される代表的な電磁放射線可変強度パターンが示されている。可変強度パターンは、オン−軸線検出器112aの位置及びオフ−検出器112bの位置で表されている。ビーム110が毛管カラムから外れている場合、電磁放射線は最大強度のビームとして通過する。ビーム110が毛管カラムの壁を横切って走査する際、低強度の拡散パターンが表され、該パターンはビームが処理する強度で毛管カラムの中心に対して成長する。ビームがカラム中心にあるとき、透過した光線強度のパターンは対称的であり、その強度は中央部で大きく、縁部で拡散している。カラムの中心から動くと、放射線は毛管の壁により拡散されて透過するので、強度は低下する。最後に、ビームは、毛管とこれに隣接する毛管との間の位置を走査し、もう一つの最大強度の集束したビームとして検出される。
【0025】
検出された電磁放射線は、可変強度スペクトルを生じ、該スペクトルは各毛管中心での反射ビーム110に対応するスキャナー122の位置を決定するために有利に使用できる。各スキャナーの位置は印加される独自の電圧値を有するので、各カラム中心に関連する放射線パターンに対応する印加電圧と互いに関係があることにより、各カラム中心のためのスキャナーミラー位置を決定することができる。
【0026】
再び図3を参照するに、オン−軸線検出器112aは、ビームが毛管を外すとき、ビームがアレーを外すか又は毛管間にあるかのいずれかであるために、非常に強い狭い信号を観察する。検出器112aは、ビームが毛管壁に当たるとき、弱くて広い拡散信号を観察し、また、ビームが毛管中心を横切るとき、広い拡散パターンを横切る輝点を観察する。 本発明の他の実施例において、検出器はオフ−軸線(112b)にあり、レーザー軸線120の側方20mmに配置されている。図3に示すように、オフ−軸線検出器112bは、オン−軸線検出器により検出されるパターンに比較してわずかに異なるパターンを観察する。検出器112bは、レーザーが毛管を外すとき光を検出しないが、ビームが毛管中心を経て走査するとき強い輝点を検出する。オフ−軸線検出器112bは、カラム中心決定プロセスに対する高めた感度を与えるように配置されている。
【0027】
各アレー114の中心に対応するスキャナー122の位置を決定する方法は、図4に表で示したシーケンスを含む。図4に関連して図3を参照するに、アレー114がパラボラコレクター124の焦点に設置された後、プロセッサーは、レーザーN1 例えばレーザー源126aのための前走査段階を開始する。前走査中、ミラー122aを端位置に位置決めるためにスキャナー122に電圧を印加するシーケンスが開始される。その後、電圧が速やかにスキャナー122に印加され、反射されたビーム110をアレー114を前後に横切って走査するようにミラー122aを速やかに動かす。
【0028】
図5が示すのは、ビーム110がアレー114の各毛管を横切って前後に走査する際にオン−軸線検出器によって観察される強さのパターンのスペクトルである。また、図7が示すのは、ビーム120がアレー114の各毛管を横切って走査するときにオアフ−軸線検出器112bによって観察される強さのパターンの、同様なスペクトルである。検出器112aによって検出された強さに対応する信号がプロセッサーに送られる。前記したように、スキャナ−122の各ステップは、1.8mV及び7.7+/−0.6ミクロンの電圧入力に対応する。データファイルは、ガルボスキャナー又はミラー位置の関数として、検出器信号強さで発せられる。プロセッサーは、データを分析し、毛管カラムの中心の表示である検出器112aにより検出された電圧強さに対応するスキャナーミラー122aの位置を抽出する。この中心位置のデータは、電気泳動操作中、引き続くデータ収集において使用される。レーザー126aのための位置合わせ走査の終わりに、同じ位置合わせ走査が開始され、レーザー126b及びその後いずれかの付加的な線源のために実行される。
【0029】
図5を参照するに、アレー144の後方に位置するオン−軸線検出器112aによって検出された、8つの毛管カラム(a〜h)を有するアレーのためのスキャナー122の位置に対する電磁放射線強度パターンが示されている。このパターンは、反射したビーム110が各カラムの中心を打つ時のスキャナーミラー122aの位置に対応する最大値58a〜58hを含む。図5のスペクトルの端の部分60は、ビームが完全にアレーを外した場合を示し、一方、カラム11のための最大値58a〜58h間の各ピークはビームが毛管間の区域を照らす時に受ける強い信号を示している。前走査位置合わせ中、ビームはアレー114aの端部を経過し、アレー114の端部を決定するように処理される端の部分60として示される非常に高い強度のピークを生じる。図6は、毛管58hを横切る走査中に得られた放射線強度パターンに対応する、図5の拡大部分を示している。
【0030】
図7を参照するに、アレー144の後方に位置するオフ−軸線検出器112bによって検出された、8つの毛管カラム(a〜h)を有するアレーのためのスキャナー122の位置に対する電磁放射線強度パターンが示されている。走査中に造られた電磁放射線強度パターンは、わずかにカラム中心を外れて8つのカラム(a〜h)のカラム穴内にあるビーム位置の表示として、8つの別々の最大値62a〜62hを生じる。(図3及びオフ−軸線検出器により観察された光線パターン参照。)オフ−軸線検出器によって観察されたピークは、オン−軸線検出器が毛管中心を登録した後の数ステップまで最大値に達しない。これは、毛管の中心を経て伝達されるビーム110によって生じる輝点が、走査軸線を横切り、オフ−軸線検出器によって検出されるために、オン−軸線検出器に比較して数ステップを要するからである。オフ−軸線検出器が軸線から20mmは外れている図示の実施例においては、ステップの数は2である。この現象は、図5及び図7の強度パターンを重ね合わせた図であり、かつオン−軸線検出器及びオル−軸線検出器により検出された毛管中心間の外れを示す図8において明らかである。前記のとおり、実施例において、オン−軸線検出器112aにより観察された毛管中心は、検出器112bにより観察される最大値から4ステップ離れており、検出された最大値は破線で示されている。ガルボメトリックスキャナー及びミラー位置にとっての既知の情報並びに図5及び図7からの情報から、単一の毛管を横切って走査するために必要なミラー位置の数又はガルボスキャナーのステップ数、したがって、ミラーを1ステップ動かす際に走査される距離は既知である。さらに詳しくは、1.8mVの26ステップが、1つの毛管を横切ってガルボスキャナーを走査するために必要である。本実施例において、1つの毛管の幅は200%μmであり、したがって、1.8mVのステップは、7.7+/−0.6μmに等しい。したがって、2ステップの外れは約15.5ミクロンであり、4ステップの外れは約31μmである。
【0031】
図5ないし図8のスペクトルから、オフ−軸線検出器112bによって観察される強度パターンは、毛管カラム中心の決定のためにより別々の最大強度(及びより単純なスペクトル)を与えることは明らかである。したがって、好ましい実施例において、検出器はオフ−軸線に配置される。20mmのオフ−軸線でも好ましく、当業者は、スキャナーミラーがアレーを横切るビームを向ける際に拡散しまた透過した電磁放射線のいずれの部分をも検出するように配置される適当な検出器が本発明の実際に従って使用できることを認めるであろう。図9は、多数の異なるオフ−軸線検出器位置で観察される実際の毛管中心から外れた多数のガルボスキャナーのステップを表にすることによって上記の概念を示したものである。例えば、アレーのNo.3の毛管の20mmのオフ−軸線検出器では、管中心からの外れは4ステップ又は約31μmである。検出器がオン−軸線位置からさらに遠くへ移動する際、外れは、25mmオフ−軸線の位置にある検出器に関連する外れによって示されるように増大する。図9に与えられる情報から明らかなように、毛管の内径及び外径は変化し、外れの量に変化をもたらす。
【0032】
いったん毛管中心が決定され、各電磁源の各毛管中心に対応するガルボスキャナー122aの位置が前記した自動位置合わせ法を行うことにより決定されると、図1の毛管電気泳動装置が前記した分析手順を行う準備が整う。すなわち、ビームは、毛管中の試料との相互作用のための電磁放射線を発するために、アレー12の各毛管カラムの前走査により決定した中心に向けられる。各毛管中心において、スキャナー22は、予め設定された時間、例えば15.7msec、その位置を保持し、その後、次のカラム中心にビーム20を向けるように位置決め電圧に応答して迅速に割り出す。このモードにおいて、焦点ビーム20は、高効率の試料の照明及び呼び掛けによって各毛管11の中心間を迅速に進められる。このデューサイクルは、プレセット間隔で各毛管中心にビームを保持することを含む。例えば、8つの毛管が2Hz の効果的な走査速度で監視される場合、ステップ200μm(100/200毛管の心心間距離)に対する時間は、400μsecであり、復帰走査時間は1msecであり、したがって、合計走査時間の99.24%が、データ収集が毛管中心で生じる場合、ドウェル時間として利用できる。
【0033】
図10を参照するに、図2に示したと同様の要素を含む他の実施例が示されている。図10に示した実施例によれば、第2のミラー130が検出器140a,140bに電磁強度パターンを反射するために使用されている。図示のように、前記電磁強度パターンを得るために、反射軸線検出器140a又はオフ−軸線検出器140bの経路に配置されている。この実施例は、図1に示した構成が寸法又は配置上の制約から可能でない場合、適当な位置への検出器の配置を可能にする。本発明の装置は、図1に示す装置を使用する連続分析のための前走査位置合わせに利用される。しかし、本発明の自動位置合わせ装置は、いつでも利用でき、前走査に限られない。例えば、毛管カラムが高圧下でゲルを負荷されるとき、分析がゲル交換の直後に行われなくとも、位置合わせを位置合わせ確認のために開始することができる。
【0034】
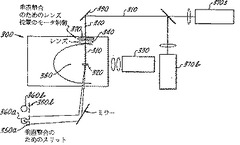
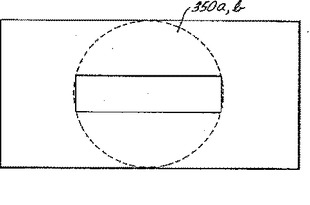
前記した本発明の側面は、毛管のアレー又は水平な毛管列内における各毛管の並んだ整合に向けられている。図11に示した、垂直位置合わせ又はレーザービーム310の光路の位置合わせ、コレクションパラボラ380の焦点面、毛管アレーの毛管ウインドウ(図示せず)、光電増倍管検出器330を使用する。さらに詳しくは、毛管にレーザービーム310を焦点合わせする集束レンズ340の高さ、光電増倍管検出器330の高さ、パラボラ380の焦点面の高さ及び毛管ウインドウの高さは、これがすべて同一垂直面にあるように相互に整合される。垂直整合は、オン−軸線検出器360aの前部のスリット350a又はオフ−軸線検出器360bの前部のスリット350bを用いて行われる。線源370a又は線源370bからのレーザー放射線は、集束レンズ340及び毛管アレー320を経てオフ・スキャナーミラー390に向けられる。光線320を通過した後、ビームは、関係するスリット360a,360bを通過した後、検出器360a,360bのいずれかに反射される。検出器360a,360bのいずれかによって検出されたパターンが図12の側面図に示すようにスリットの形状を示すならば、そのときは、装置は垂直に整合されている。その形状が明瞭でないときは、パラボラ380の焦点面におけるアレー320にビームを適当に焦点合わせするために、モータ制御装置370を使用して集束レンズ340を動かす。このレンズは、適当な垂直高さを占めるまで調節される。
【図面の簡単な説明】
【0035】
【図1】本発明の1実施例にかかる多毛管光学装置を示す図。
【図2】本発明の装置における、オン−軸線検出器およびオフ−軸線検出器を示す図。
【図3】ビームが毛管カラムを横切って走査した際にオン−軸線検出器およびオフ−軸線検出器によって観察された電磁反射強度パターンを示す図。
【図4】カラム中心の決定のためのシーケンスを示すフロー・チャート。
【図5】放射線ビームが8つの毛管カラムのアレーを横切って走査した際にオン−軸線検出器によって観察された強度パターンのスペクトルを示す図。
【図6】図5に示された1つの毛管の拡大スペクトル図。
【図7】放射線ビームが8つの毛管アレーを横切って走査した際にオフ−軸線検出器によって観察された強度パターンのスペクトル図。
【図8】図5に示したオン−軸線検出器のスペクトルと図7に示したオフ−軸線検出器のスペクトルとを組合わせることによって得られた重ね合わせスペクトル図。
【図9】オフ−軸線検出器の位置と毛管の中心位置から外れたガルボスキャナーのステップ数を表す表。
【図10】本発明の他の実施例にかかる装置を示す図。
【図11】同一垂直面に光学素子、毛管及び検出器を整合させる装置を示す図。
【図12】図11に示した装置における整合検出器の全部に配置されたスリットの側面図。
【符号の説明】
【0036】
10 レーザー放射線蛍光検出装置(CE−LIF装置)
11 毛管カラム
12 多数の毛管カラム
14A、14B レーザー
20 放射線のビーム
22 スキャナー
23 ミラー(リフレクタ)
24 集束レンズ
26、112a、112b 検出器
28 パラボラコレクター
36 プロセッサー
116 可変強度光線パターン
350a、350b スリット
【特許請求の範囲】
【請求項1】
保持手段で実質的に固定位置に保持されたアレーの複数の毛管において、該複数の毛管のそれぞれを整合させる装置であって、
電磁放射線を発生する発生手段と、
前記毛管のそれぞれと個々に相互作用する電磁放射線を前記毛管に向けて、前記アレーの軸線に直交する経路に沿って、かつ前記アレーを横切って前記毛管を連続的に走査させる電磁放射線指向手段と、
相互作用した前記電磁放射線を検出する検出手段とを含み、
前記電磁放射線は、前記毛管のそれぞれと個別に相互作用を行って、可変強度放射線パターンを生じさせ、
前記検出手段は、前記経路に沿った位置と、前記経路から離れた位置とから選択される位置で、かつ、前記発生手段から見てアレーの後方の位置に配置されており、
前記検出手段は該検出手段と前記毛管との間に配置されたスリットを有する、装置。
【請求項1】
保持手段で実質的に固定位置に保持されたアレーの複数の毛管において、該複数の毛管のそれぞれを整合させる装置であって、
電磁放射線を発生する発生手段と、
前記毛管のそれぞれと個々に相互作用する電磁放射線を前記毛管に向けて、前記アレーの軸線に直交する経路に沿って、かつ前記アレーを横切って前記毛管を連続的に走査させる電磁放射線指向手段と、
相互作用した前記電磁放射線を検出する検出手段とを含み、
前記電磁放射線は、前記毛管のそれぞれと個別に相互作用を行って、可変強度放射線パターンを生じさせ、
前記検出手段は、前記経路に沿った位置と、前記経路から離れた位置とから選択される位置で、かつ、前記発生手段から見てアレーの後方の位置に配置されており、
前記検出手段は該検出手段と前記毛管との間に配置されたスリットを有する、装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−19853(P2010−19853A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2009−238100(P2009−238100)
【出願日】平成21年10月15日(2009.10.15)
【分割の表示】特願2006−70876(P2006−70876)の分割
【原出願日】平成8年8月23日(1996.8.23)
【出願人】(591028256)ベックマン コールター インコーポレイテッド (24)
【氏名又は名称原語表記】BECKMAN COULTER,INCORPORATED
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成21年10月15日(2009.10.15)
【分割の表示】特願2006−70876(P2006−70876)の分割
【原出願日】平成8年8月23日(1996.8.23)
【出願人】(591028256)ベックマン コールター インコーポレイテッド (24)
【氏名又は名称原語表記】BECKMAN COULTER,INCORPORATED
【Fターム(参考)】
[ Back to top ]