
毛羽検出装置及び毛羽検出方法
【課題】走行糸条に発生した毛羽の存在を、接触式毛羽検出装置を走行糸条に近接させて設けて検出する必要がなく、しかも、100m/分以上の高速で走行する糸条に生じた毛羽であっても、誤作動が少なく安定して毛羽を検出することができる毛羽検出装置と毛羽検出方法を提供する。
【解決手段】フィラメントが切断されて生じた毛羽を検出するために、ローラ(11)上を走行するマルチフィラメント糸条(Y)の糸道方向に対して、一方向平行に引き揃えられたレーザー光束(L)を投光する投光器(21)を設け、予め設定したサンプリング時間間隔毎に一定面積部分の前記レーザー光束(L)の光量を受光器(22)で受光し、受光した一定面積のレーザー光束(L)の各光量から前記毛羽の存在によって遮光されて生じる光量変化量を算出し、算出した光量変化量から毛羽の存在を判定するためのデータ処理を行うデータ処理装置(6)を有する毛羽検出装置とその毛羽検出方法とする。
【解決手段】フィラメントが切断されて生じた毛羽を検出するために、ローラ(11)上を走行するマルチフィラメント糸条(Y)の糸道方向に対して、一方向平行に引き揃えられたレーザー光束(L)を投光する投光器(21)を設け、予め設定したサンプリング時間間隔毎に一定面積部分の前記レーザー光束(L)の光量を受光器(22)で受光し、受光した一定面積のレーザー光束(L)の各光量から前記毛羽の存在によって遮光されて生じる光量変化量を算出し、算出した光量変化量から毛羽の存在を判定するためのデータ処理を行うデータ処理装置(6)を有する毛羽検出装置とその毛羽検出方法とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行するマルチフィラメント糸条を構成するフィラメントが切断して生じた毛羽を検出するための装置と方法に関する。
【背景技術】
【0002】
一般に、多数のフィラメント群(単繊維群)から構成されるマルチフィラメント糸条において、何らかの原因で構成するフィラメントが切断されると、切断されたフィラメントの糸端が毛羽として、糸条の表面に現われる。
【0003】
このようにして発生した毛羽は、製糸工程において様々なトラブルの原因となる。また、毛羽の発生部位は、毛羽が発生していない部位と比較して、機械的強度が低下しており、機械的強度が求められる製品においては品質不良となる。さらに、糸条を巻取ったパッケージなどに毛羽が存在すると、外観も良くない。
【0004】
その上、例えば製造工程中に発生した毛羽がガイド等に巻き付いて蓄積されると、糸条の走行に支障を生じさせ、著しい場合には、糸条の走行が不可能になる。しかも、ガイド上に蓄積された毛羽が、徐々にあるいは一気に走行糸条に付着して後工程に流れると、付着した毛羽によって製品品位のさらなる低下を招く。
【0005】
そこで、従来、例えば特許文献1及び2などにおいて、製糸中に毛羽が発生すると、毛羽が発生したことを検出して、前述のような問題が発生することを事前に防止しようとする試みがなされている。しかしながら、これらの何れの従来技術においても、走行している糸条のごく近くに毛羽の発生を検出するための装置を設ける必要がある。
【0006】
すなわち、特許文献1(特開2002−180348号公報)で提案されている技術では、「走行糸条が走行方向を変更する際に生じる遠心力によって走行糸条から毛羽を遊離させ、この毛羽を前記走行糸条の走行路と交差し、かつ接近して配置した毛羽検出装置の毛羽検出先端部に衝突させ、その衝突力によって毛羽を検出する技術」である。
【0007】
また、特許文献2(特開2003−301369号公報)に提案されている技術は、前記特許文献1のように遠心力によって走行糸条から毛羽を分離させるという必要はないが、それでも、発生した毛羽が感知手段に接触したことを検出することには変わりない。したがって、毛羽検出手段を発生した毛羽を検知できるように走行糸条に近接させて設けなければならないことに変わりはない。
【0008】
このように、前述の特許文献1及び2に提案されている従来技術では、断糸の発生あるいは装置メンテナンスなどの要因が生じたり、再糸掛けなどの作業が必要となったりした場合に、作業の妨げとなる毛羽検出装置を作業の妨げとならない位置へ一旦退避させる必要がある。そして、これらの作業が完了してから、退避させた毛羽検出装置を所定の位置へ戻した後に、毛羽検出の再現性などを調整する必要がある。
【0009】
そこで、このような走行糸条に近接させて毛羽検出装置を設置する必要がある接触式毛羽検出技術に代えて、走行糸に光を投射する投光器と、この投光器から投射された光を受光する受光器とを備えた非接触式毛羽検出技術が、例えば特許文献3(特開2004−316055号公報)などに提案されている。なお、この従来技術では、走行糸に発生した毛羽によって遮られて生じる光量変化量によって、毛羽の発生を検知しようとするものである。
【0010】
しかしながら、この従来技術は、ローラの軸方向(すなわち、糸条の走行走行と直角の方向)に、投光器と受光器とを対向配置して毛羽を検出している。このため、走行糸条の速度が100m/分以上と速くなると、走行糸条は一瞬にして光束を横切ってしまうため、光量変化を正常に精度良く検出するのが非常に困難である。このような理由から、この従来技術では、走行糸条の速度は10m/分と極めて低速の領域でしか毛羽検出が良好に行えないという問題がある。
【0011】
また、この従来技術では、高速走行する糸条がローラを出た後の糸条に対して、光量変化を検出するための光を走行糸条に対して投射して毛羽を検出している。このため、走行糸条の糸道がローラによって規制されずに、自由走行するため糸条に振動が生じるという問題がある。
【0012】
この従来技術では、もし、走行糸条に振動が発生すると、振動の影響をうけて,毛羽が存在するにも拘らず、正確に毛羽を検出できないという問題が生じる。特に、100m/分で高速走行する糸条にこのような走行振動が生じると、毛羽の検出が不可能であるとは言わないまでも、非常に困難となる。
【0013】
【特許文献1】特開2002−180348号公報(特許請求の範囲)
【特許文献2】特開2003−301369号公報(特許請求の範囲)
【特許文献3】特開2004−316055号公報(段落[0012]、[0020]及び[0022])
【発明の開示】
【発明が解決しようとする課題】
【0014】
本発明の目的は、上述した従来技術が有する諸問題を解決することにある。すなわち、走行糸条に発生した毛羽の存在を毛羽との接触によって検出する接触式毛羽検出装置を走行糸条に近接させて設ける必要がなく、しかも、100m/分以上の高速で走行する糸条に生じた毛羽であっても、糸条に振動などの影響による誤検出を抑制することにある。そして、高速走行する糸条であっても、安定して毛羽を検出することができる毛羽検出装置と毛羽検出方法を提供することにある。
【課題を解決するための手段】
【0015】
ここに、前記課題を解決するための手段として、下記の(1)〜(10)に記載の毛羽検出装置及び毛羽検出方法が提供される。
【0016】
(1) マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光する投光器と、
予め設定したサンプリング時間間隔毎に前記レーザー光束の光量を一定の面積で受光する受光器と、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を演算して毛羽の検出処理を行うデータ処理装置とを少なくとも備えた毛羽検出装置。
(2) 前記データ処理装置が、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を算出する光量変化算出手段と、
一定の時間間隔毎にサンプリングして算出した前記各光量変化量に対して最新に算出した光量変化量と前回算出した光量変化量との間の差分として光量変化速度をリアルタイムで演算する光量変化速度の演算手段と、
演算された前記光量変化速度が基準値を超えた場合に毛羽の発生と判定するための閾値を記憶する記憶手段と、
前記光量変化速度と前記閾値とを比較するための比較手段と、
比較する光量変化速度が前記閾値を超えた場合に毛羽の発生を検出したと判定する毛羽判定手段とを少なくとも備えた、(1)に記載の毛羽検出装置。
(3) 前記受光器で検出する光量のサンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)で取り込んだN個の光量データの平均値又は総和値によって、各サンプリング時間間隔(ΔT1)で取り込む光量データを代表させるデータ平滑化手段を前記データ処理装置が備えた、(1)又は(2)に記載の毛羽検出装置。
(4) 前記レーザー光が可視光である、(1)〜(3)の何れかに記載の毛羽検出装置。
(5) 前記レーザー光束が矩形の光束である、(1)〜(4)の何れかに記載の毛羽検出装置。
(6) 前記データ処理装置によって毛羽の存在が検出されるたびにその回数をカウントするカウンター手段を備えた、(1)〜(5)の何れかに記載の毛羽検出装置。
(7) 前記データ処理装置によって毛羽の存在が判定された場合にローラ上を走行する糸条を供給する装置に停止信号を発する停止手段を備えた、(1)〜(6)の何れかに記載の毛羽検出装置。
(8) 前記データ処理装置によって毛羽の存在が判定された場合に警報を発する警報手段を備えた、(1)〜(7)のいずれかに記載の毛羽検出装置。
(9) マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光し、
予め設定したサンプリング時間間隔毎に一定面積を有する前記レーザー光束の光量を受光し、
前記毛羽の存在によって遮光されて生じる光量変化量をそれぞれ算出し、
毛羽の存在を判定するために予め設定した閾値と算出された前記光量変化量とを比較し、そして
前記光量変化量が前記閾値を超えた場合に毛羽の発生を検出したと判定することを特徴とする毛羽検出方法。
(10) 前記マルチフィラメント糸条が前記ローラ上を走行する速度が200〜1500m/分である、(9)に記載の毛羽検出方法。
(11) 光量を取り込む前記サンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)でN個の光量データを取り込み、取り込んだN個のデータの平均値又は総和値によって、取り込んだ光量データを平滑化する、(9)又は(10)に記載の毛羽検出方法。
(12) 毛羽の発生が検出された場合にローラ上を走行する糸条の供給を停止することを特徴とする、(9)〜(11)の何れかに記載の毛羽検出方法。
(13) 毛羽の発生が検出された場合に警報を発することを特徴とする、(9)〜(12)の何れかに記載の毛羽検出方法。
(14) 毛羽の存在が確認されるたびに検出回数をカウントし、一定長の糸条中及び/又は巻取後の糸条パッケージ中に存在する毛羽の数をカウントする、(9)〜(13)の何れかに記載の毛羽検出方法。
(15) 毛羽の存在が確認された時刻と前記毛羽が検出された糸条を巻取った糸条パッケージとを記憶し、記憶させた情報を基に糸条パッケージ中に存在する毛羽位置を特定する、(9)〜(14)の何れかに記載の毛羽検出方法。
(16) 前記閾値を数段階に設定し、毛羽が通過する際に遮光された光量の大きさに応じて検出した毛羽の大きさを複数に分類・層別して出力する、(9)〜(15)の何れかに記載の毛羽検出方法。
【発明の効果】
【0017】
先ず、本発明に係る毛羽検出装置と毛羽検出方法によれば、検出対象となる走行糸条は、ローラ上に支持される。したがって、ローラによって規制された一定の糸道上を糸条が走行する。このために、ローラに拘束されずに自由走行する糸条と異なって、糸条に振動が発生しない。
【0018】
したがって、走行糸条は振動せずに実質的に絶えず一定の糸道上を走行するので、走行糸条に対して投光するレーザー光束の位置は常に一定位置を保たれる。このため、糸条が遮る光量は、糸条振動などの外乱の影響を受けず常に安定しており、光量の誤検出が生じ難い。
【0019】
しかも、本発明に係る毛羽検出装置と毛羽検出方法では、レーザー光束を利用した非接触式の毛羽検出方式を採用している。このため、毛羽検出手段を走行糸条と離れた位置に設けることができ、従来技術のように近接して設置する必要がない。
【0020】
そうすると、走行糸条をローラに再糸掛けするような作業が生じた場合に、作業の妨げにならない位置へ毛羽検出装置を一旦退避させなくても、作業の妨げになることはない。また、通常、走行糸条に付与される処理剤などの飛散によって、毛羽検出装置が汚染されたり、破断した糸端が毛羽の検出部に絡みついたりすることもない。
【0021】
さらに、レーザー光束による毛羽検出を行っているため、誤作動が少なく、その上、毛羽の検出精度も向上する。そうすると、発生した毛羽を迅速かつ確実に検出でき、製造した糸条の品質管理を良好に実施することができる。
【発明を実施するための最良の形態】
【0022】
本発明において、毛羽検出の対象となる糸条は、複数のフィラメント(長単繊維)から構成されるマルチフィラメント糸条である。その際、このようなマルチフィラメント糸条の種類としては、通常用いられている天然繊維、半合成繊維、合成繊維など特に限定はない。しかしながら、毛羽の発生は合成繊維の延伸工程などで多発するため、合成繊維を対象とすることが好ましい。具体的には、アクリル繊維、ポリエステル繊維、ナイロン繊維、アラミド繊維、アリレート繊維、又は炭素繊維等を好ましく挙げることができる。
【0023】
以下、図面を参照しながら、本発明に係る毛羽検出装置と毛羽検出方法の実施形態について説明する。
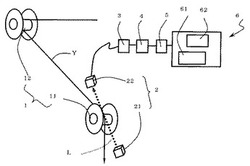
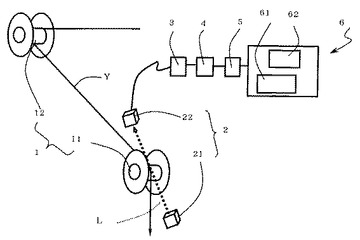
図1は、本発明に係る毛羽検出装置の一実施形態例を示した模式説明図(斜視図)である。この図1において、符号Yは複数のフィラメント(長単繊維)から構成されるマルチフィラメント糸条(以下、単に“糸条”ともいう)であり、この糸条Yは2個のローラ1(11及び12)の上を走行している。また、2は透過型レーザー光量検出器であり、この透過型レーザー光量検出器2は、投光器21及び受光器22を含んで構成されている。
【0024】
以上に述べたように、本発明においては、図1の例に示したように、糸条Yが2個のローラ1(11及び12)上を走行する間は、ローラ1によって走行する糸条Yの糸道が一定に規制される状態にある。そこで、本発明では、このような状態を有効に活用する。すなわち、ローラ1の上を図示した矢印方向へ糸条Yが走行する間は、糸条Yに振動が発生せず、所定の糸道上(ローラ上)を糸条が安定に走行することを利用する。
【0025】
次に、このように、ローラ1の上を安定走行する糸条Yの糸道を間に挟んで、透過型レーザー光量検出器2の投光器21から一定面積を有するレーザー光束L(図には有向点線で示してある)を受光器22に向かって投光する。なお、図1の例では、糸条Yの走行方向に対して逆方向からレーザー光束Lを糸道に対して投光しているが、糸条Yの走行方向と順方向に投光してもよいことは言うまでもない。
【0026】
ここで、本発明においては、前記レーザー光束Lは、一定面積を有しかつ一方向へ引き揃えられた光束であることが必要であって、光が拡散せずに一定面積に集束した光束状態のままで伝播することが必要である。この理由から、本発明では、一方向へ引き揃えられた単一波長を持つレーザー光を糸道へ照射する光として使用することが好ましい。
【0027】
一般に、投光器21に設けられた半導体レーザー光発信器から発せられるレーザー光は、図示省略した投光レンズユニットで平行な光束状態として受光器22に向かって発信される。そして、受光器22側のスリットを通過したレーザー光が受光素子に集光される。
【0028】
このとき、投光器21から投光するレーザー光束Lの形状としては、既に述べたように、光束Lの進行方向に対して直角に切断した場合に、どの位置で光束Lを切断しても光束Lの断面積が一定であることが好ましい。何故ならば,このようにすることによって、投光器21と受光器22との間の設置距離による影響を少なくすることができるからである。
【0029】
すなわち、投光されたレーザー光束Lの平行なエリア内に、レーザー光束Lを遮る物(本発明における「毛羽」)が存在すると、投光器21と受光器22との間の設置距離に関係なく、毛羽が投光器21と受光器22の間に存在する限りにおいて、良好に光量変化を検出することができるからである。これに対して、レーザー光束Lをある焦点距離を持たせて絞ったり、あるいは拡散させたりすると、投光器21及び受光器22の設置位置を微妙に調整する必要が生じ、対象物に遮られて減少した光量変化を良好かつ精度よく検出することができない。
【0030】
以上に述べたようにして、光量検出器2によって検出された光量変化は、通常、例えばアナログ電圧出力のような形で取り出される。ついで、取り出されたアナログ信号(光量信号)は、図1に例示したように、増幅器(アンプ)3、A/D変換器(アナログ信号/デジタル信号変換器)4、インターフェース手段5などを介して、パーソナルコンピュータなどで構成されるデータ処理装置6へデジタル情報として取り込まれる。そして、データ処理装置6に取り込んだデジタル情報をデータ処理することで、走行する糸条Yに発生した毛羽の有無を判別して、毛羽検出を良好かつ精度よく行う。
【0031】
以上に述べたように、データ処理装置6では毛羽Fの存在を判定するためのデータ処理を行う。このデータ処理装置6の具体的な実施態様としては、既に述べたパーソナルコンピュータに限定する必要はないが、通常パーソナルコンピュータなどの市販のコンピュータで構成することができる。
【0032】
ここで、本発明に係る前記データ処理装置6は、記憶手段61、中央演算処理装置(CPU:セントラル・プロセッシング・ユニット)62などを少なくとも備えており、このCPU62によって、受光器22によって検出された光量の比較と光量変化の算出、評価基準値(閾値)と光量変化値との比較による毛羽判定、光量データの平滑化処理などを行う。したがって、CPU62は、前記記憶手段61などと協働しながら、光量変化算出手段、比較手段、毛羽判定手段、そして、データ平滑化手段といった役割を兼ねている。
【0033】
なお、データ処理装置6が備える記憶手段61は、例えばRAM(ランダム・アクセス・メモリー)やROM(リード・オンリー・メモリー)などの半導体記憶素子、あるいは磁気記憶媒体などで構成されるハードディスクなどから構成されている。そして、これら記憶手段61に、検出した光量定法などの必要情報や毛羽検出処理を行うために必要とされるプログラムなどを記憶させておく。
【0034】
そうすると、この記憶手段61に記憶されたプログラムを実行することによって、前述のインターフェース手段5などを介して、受光器22によって取り込まれた光量に係るデジタル化されたデータを処理することができる。このようにして、本発明においては、データ処理によって走行糸条Yに生じた毛羽Fの存在を判定する。
【0035】
以下、本発明の一大特徴である前記「光量変化を検出して、走行糸条Yに発生した毛羽を検出する処理」について、図2〜図4を参照しながら詳細に説明する。
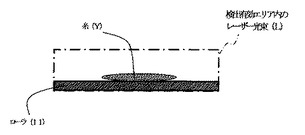
図2は、投光器21が備えるレンズ系によって一方向に平行に引き揃えられたレーザ光束Lを、図1に示したローラ11の上を走行する糸条Yの糸道に対して投光し、投光されたレーザー光束Lを受光器22に設けられたスリット(例えば幅10mm、高さ1mm)から受光素子に取り込む場合の実施形態例を示した模式説明図である。また、この図2は、糸条Yが走行するローラ11上に投光されたレーザー光束Lの光量変化を検出する有効エリア(図2において、一点鎖線で示した)の模式断面図でもある。
【0036】
なお、図2に示したように、走行糸条Yは複数のフィラメント群から構成されている。このため、ローラ11上を走行するフィラメント群は、ローラ11に押圧されて、ローラ11上で潰されたように扁平状態に広がった状態となる。なお、付言しておくと、この図2の例では、走行糸条Yには毛羽が未だ発生していない状態を示している。この例のように毛羽が発生していない糸条Yがローラ11上を走行する場合は、受光器22によって検出される光量は、外乱などの影響によって多少変化するものの、ほとんど変化しないで、ほぼ一定の水準で推移する。
【0037】
ところで、光量変化を検出するレーザー光束Lの有効エリア(光束Lの横断面積)は、例えば幅10mm、高さ1mm程度の矩形エリアとして設定することができる。なお、この寸法は前述の受光器22に設けられたスリット形状によって任意に設定することができる。しかしながら、この有効エリアの設定は、製糸条件などに対応させて予め実験などによって最適な値を選定し、この選定した最適値に設定することが必要であることはいうまでもない。
【0038】
本発明において、前記有効エリアの幅方向長さを高さ方向長さよりも大きくしているのは、次のような理由による。すなわち、既に述べたように、糸条Yは、ローラ11上の所定の糸道上を扁平形状で走行する。したがって、走行糸条Yには、糸道の上下方向に対しては振動が生じないが、糸道の幅方向にはローラ11から何らの規制も受けない。このため、この幅方向に対しては、糸条Yが走行する糸道がある程度ずれる可能性が充分にあるので、この点を考慮した結果である。
【0039】
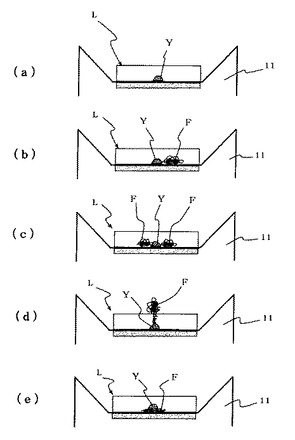
次に、前記図2に例示したような毛羽が存在しない状態で走行する糸条Yにおいて、毛羽が発生した場合について、図3及び図4を参照しながら、毛羽を検出する方法について詳細に説明する。なお、図3において、符号Fは毛羽を示しており、この例では前記毛羽Fが絡み合って塊状となった状態であることを示している。
【0040】
ここで、図3において、図3(a)は、図2と同様に、まだ毛羽Fが発生していない正常状態、図3(b)は毛羽Fが走行糸条Yの右側部に発生している状態、図3(c)は毛羽Fが走行糸条Yの右側部及び左側部にそれぞれ発生している状態、図3(d)は毛羽Fが走行糸条Yの上部に発生している状態、そして、図3(e)は毛羽Fが走行糸条Yの下部に糸条Yとローラ1とに挟まれて発生している状態をそれぞれ示している。
【0041】
この図3において、その詳細は後述するが、図3(b)及び(c)のケースは、良好に毛羽Fの存在を検出できる場合である。また、図3(d)のケースは、図示した状態では毛羽Fの検出は正常に行えないが、毛羽検出装置の設定を変更すれば毛羽Fの検出を行える場合である。そして、図3(e)のケースは、毛羽Fが糸条Yに巻き込まれてしまっているため、毛羽Fの検出が難しい場合である。
【0042】
なお、図3(d)のケースは、毛羽Fの検出を行うための有効な範囲から毛羽Fの存在位置が外れているために、毛羽Fの検出が行えないケースである。しかしながら、毛羽Fの検出範囲を更に上部にまで拡げることによって、毛羽Fを良好に検出することができる。つまり、このケースでは、毛羽Fの検出範囲を高さ方向にまで拡げることによって、毛羽Fの検出が可能となる。
【0043】
以上に述べたように、本発明では、ローラ1上を走行する糸条Yに存在する毛羽を検出することを一大特徴とする。このとき、走行糸条Yはローラ1によって支持されているために、その動きが糸道上に規制されて、上下に振動することがない。そうすると、糸条Yの振動から開放されて、より外乱が少ない状態で毛羽Fの検出を安定かつ精度よく行うことができる。
【0044】
なお、糸条Yが走行するローラ1は、糸条Yが安定に走行するのに十分な直径、幅、強度を有していればその素材、表面状態等を特に限定する必要はない。また、糸条Yが走行するローラ1は、糸条Yとの摩擦力によって従動駆動するフリーローラであっても、電動機などによって強制的に駆動される強制駆動ローラであってもよい。
【0045】
しかしながら、回転しない固定状態のローラである場合には、走行糸条とローラとの間の摩擦が大きくなって、毛羽を発生させてしまうため好ましくなく、好ましいのは毛羽Fが発生しない製糸条件の場合のみである。ただし、走行糸条Yにダメージを与えないという条件を満足する限りにおいて、固定ローラあるいは固定ガイドであっても、特に制限する理由はない。
【0046】
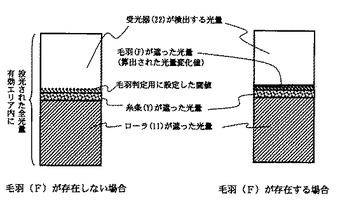
次に、図4について説明すると、受光器22が受光する一定面積の有効エリア内へ投光された全光量に対し、遮られて受光器22まで到達しなかった光量の割合を示す棒グラフであって、左側の棒グラフは毛羽Fが存在しない場合、右側の棒グラフは毛羽Fが存在する場合をそれぞれ示している。
【0047】
この図4に示した左側の棒グラフから明らかなように、受光器22まで到達しなかった光量は、走行糸条Yに毛羽Fが存在しない場合には、ローラ11によって遮られた光量と糸条Yが遮った光量の合計量となり、これら遮られた合計光量を差し引いた光量が受光器22によって検出される。
【0048】
これに対して、図4に示した右側の棒グラフのように、走行糸条Yに毛羽Fが発生すると、この毛羽Fによって遮られる光量が、更に受光器22まで到達しないことになる。したがって、この場合には、受光器22が受光する光量は、右側の棒グラフの場合よりも、毛羽Fによって遮られた光量分だけ減少する。
【0049】
そこで、本発明に係る毛羽検出装置及び毛羽検出方法では、以下に述べるようにして、受光器22が検出した光量から、毛羽Fの存在によって遮られた光量変化量をデータ処理装置6で算出する。そして、算出した光量の変化量が閾値を超えた場合に、毛羽Fが存在すると判定し、閾値を超えなかった場合には毛羽Fは存在しないと判定する。
【0050】
なお、この毛羽判定は、以下に述べるステップに基づいて行われる。
まず、予め設定したサンプリング時間間隔(ΔT1)毎に投光されたレーザー光束Lを受光器22によって受光する。そして、受け取った光量(例えば、アナログ電圧値)を必要に応じて増幅器(アンプ)3によって増幅した後、A/D変換器4を通してデジタル信号に変換する。ついで、インターフェース手段5を介してデータ処理装置6に取り込む。
【0051】
なお、前記サンプリング時間間隔(ΔT1)は、毛羽の検出処理が充分に可能な時間間隔に設定されるという条件付きで、毛羽検出の速度を上げるためにできるだけ短いことが好ましいことは言うまでもない。このサンプリング時間間隔(ΔT1)は、本発明者が行った実験の範囲内ではあるが、糸条Yの走行速度(100〜3000m/分)も考慮した上で、0.6〜2.0 msecの範囲に設定することが好ましいことが分かっている。
【0052】
また、本発明においては、一定のサンプリング時間間隔(ΔT1)の間に、このサンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)を設定する。そして、設定した時間間隔(ΔT2)毎にN個の光量データ群をサンプリングして前記記憶手段61に逐次記憶することが好ましい。したがって、ΔT1とΔT2は、ΔT2=ΔT1/Nという関係式を満たすことになる。
【0053】
ついで、サンプリング時間間隔(ΔT1)をN分割する時間間隔(ΔT2)の間に、CPU62(データ平滑化手段)によって取り込んだN個の光量データの平均値を求めて、この光量平均値をサンプリング時間間隔(ΔT1)の光量データとして代表させる。なお、この場合、平均値の計算に代えて、時間間隔ΔT2毎に得られた光量の総和を算出し、この総和を代表させるようにしても構わない。
【0054】
このようにすることによって、短時間間隔(ΔT2)で光量データを採取した際に、大きなノイズが混入して、毛羽Fが発生していないにもかかわらず、毛羽Fが存在してしまうといった誤検出が少なくなる。また、糸条Yの微振動による影響などの本来検出すべき毛羽の存在以外の要因で毛羽検出装置が誤作動してしまう可能性も激減させることができる。
【0055】
その結果、毛羽Fの検出誤作動を回避することができ、精度よく安定に精確な光量変化を算出することができる。したがって、糸条Yの品質管理上は勿論のこと、毛羽検出装置の自体の操作や微調整などに要する無駄な手間が省ける点においても好ましい。
【0056】
なお、ΔT1/ΔT2は、2〜10とすることが好ましい。何故ならば、ΔT1/ΔT2が1であれば、短サンプリング時間間隔(ΔT2)を設定する意義が全くないからである。逆に、ΔT1/ΔT2が10を超えると、実際に毛羽Fが検出されても、毛羽Fの大きさが小さい場合に、せっかく毛羽Fを検出したにも拘らず、多くの光量データの中に検出した毛羽Fの光量が埋没されてしまって、その寄与が薄められてしまう。そうすると、逆に毛羽Fを検出したにも拘らず、検出しなかったという誤作動を起こす可能性が出てくる。
【0057】
この場合、糸条Yが走行する速度を遅く設定し、時間間隔をより短くするほど、よりきめ細かな毛羽Fの検出を期待することができる。しかしながら、糸条Yの生産性を確保した上で、毛羽Fの検出限界(分解能)を考慮すると、糸条Yの走行速度は100m/分以上であり、好ましくは100〜3000m/分であり、特に好ましい範囲は、200〜1500m/分である。
【0058】
次に、以上に述べた一定の短サンプリング時間間隔(ΔT2)でデータ処理装置6に取り込まれた光量データは、逐次記憶手段61に記憶され、これと共に、サンプリング時間間隔(ΔT1)毎の代表光量データが算出される。このようにして、サンプリング時間間隔(ΔT1)毎の代表光量データが算出されると、CPU62(光量変化算出手段)は、最新の代表光量値が毛羽Fの存在によって変化しているか否かを判断する。そのために、最新の代表光量値と最新よりも1ステップ前(最新よりも一つ前のデータサンプリング時)に算出された代表光量値とを記憶手段61から読み出して、これらの光量値を減算して光量変化量をリアルタイムで算出する。
【0059】
つまり、通常、毛羽Fがレーザー光束Lを遮らない場合(毛羽が存在しない場合)は、図4の左側の棒グラフに例示したように、糸条(Y)とローラ(11)とが遮った光量の合計は、外乱要因からなる微小変動を除いて殆ど変化せずに一定に推移する。したがって、CPU62(光量変化算出手段)によって算出される光量変化量は殆どゼロに近い値をとる。
【0060】
しかしながら、図4の右側の棒グラフに示したように、毛羽Fが存在すると、毛羽Fによって遮られた光量分だけ受光器22が取り込む光量が少なくなる。そうすると、既に述べたように、毛羽Fによって遮られた光量分だけが光量変化量として、CPU62(光量変化算出手段)によってその違いが算出される。
【0061】
したがって、光量変化が判定基準値(閾値)を超えるレベルで検出された場合に、毛羽Fが存在すると判定できる。このように、算出された光量変化量が判定基準値よりも小さい値であった場合に、毛羽Fが存在するとして判定することの利点は、毛羽Fの存在以外の原因によって、わずかでも光量が変化すると、これによって毛羽Fを誤って検出してしまうという誤検出が生じるのを回避できることである。
【0062】
そこで、図4の左側の棒グラフに点線で囲んだように、毛羽Fの存在を判定するための基準値となる“毛羽判定用の閾値”を設けて、これを前記記憶手段61に記憶させておく。そして、CPU62(光量変化算出手段)によってサンプリングされた光量データから算出した光量変化量と、記憶手段61に記憶させておいた前記閾値とをCPU62(比較手段)によって比較する。この比較の結果、算出された光量変化量が前記閾値を超えた場合にCPU62(毛羽判定手段)によって毛羽Fが検出されたと判断する。
【0063】
その際、閾値を超えなかった場合には、毛羽Fが検出されなかったと判断される。したがって、閾値の設定は、注意深く行う必要がある。通常、最適な閾値の設定は充分な実験によって毛羽Fの誤検出が少なくなる値を探し出して、最適な値に設定することが望ましい。
【0064】
このとき、毛羽判定手段によって毛羽Fの存在が確認されるたびに、その回数をカウントするカウンター手段を毛羽検出装置が備えることが好ましい。このようにして、一定長の糸条Y中あるいは巻取後の糸条パッケージ中に存在する毛羽Fの数を正確にカウントする。そして、カウントした回数を前記記憶手段に記憶させて、この情報を取り出し可能とするようにすることは好ましい実施態様である。
【0065】
更に、前記閾値を数段階に設定し、毛羽Fが通過する際に遮光された光量の大きさに応じて検出した毛羽の大きさを複数に分類・層別して出力することも好ましい実施態様である。具体的には、例えば品質に甚大な影響を及ぼす大きさの毛羽F、中程度の影響を及ぼす大きさの毛羽F、小程度の影響を及ぼす大きさの毛羽Fと言ったように3段階に分類し、毛羽Fの大きさの程度により、毛羽Fが検出された糸条Y毎に適切な処置を実施することができるようにすることが好ましい。
【0066】
また、毛羽検出装置には、走行する糸条Yの走行開始時間、走行速度、毛羽Fを検出した時間を毛羽検出と連動して前述の記憶手段61に記憶させるようにすることも好ましい実施態様である。この場合、記憶させた数値を基にワインダーなどで巻き取られた後の糸条パッケージのどの位置に毛羽検出装置によって検出された毛羽Fが存在しているかを容易に特定することができる。そうすると、例えば後で糸条パッケージから糸条を巻き出した際に、目視等により容易に毛羽Fの発生位置を特定することができる。
【0067】
更に、本発明においては、データ処理装置6によって毛羽の存在が判定された場合に、走行する糸条をローラ1へ供給する駆動装置(図示せず)を停止する停止信号を発する停止手段を備えていることも好ましい。何故ならば、糸条の走行を停止することにより、毛羽の存在する糸条とそうでない糸条の層別を容易かつ早急にすることができ、糸条の品質管理において好ましいからである。
【0068】
また、前記データ処理装置6によって毛羽の存在が判定された場合に、警報を発する警報装置(図示せず)を備えていることも好ましい。何故ならば、警報を発することにより、巻き取られた糸条パッケージ単位で、毛羽の存在する糸条パッケージとそうでない糸条パッケージの層別を容易かつ早急にすることができ、糸条の品質管理において好ましいからである。なお、警報は警報音、光を点灯または点滅させる警報灯、あるいは有線又は無線の通信機器を用いて警報信号を送信する警報通信器なども含まれる。
【0069】
また、本発明によると、定期的に毛羽検出装置を清掃する手間も省くことができ、且つ長時間の連続運転が可能になった。しかも、走行糸条及びローラなどの回転体から離れた位置に毛羽検出装置を設けることができ、再糸掛けなどの再に作業の妨げとなるとして作業の支障となる位置にまで退避させる必要も無くなった。
【0070】
以上に説明した実施態様において、ローラ1上を走行する糸条Yの本数が1本の場合について説明したが、複数本の糸条がローラ1上走行する場合であっても構わない。例えば、こきのような場合には、各糸条が走行する糸道毎に本発明に係る毛羽検出装置を設けて、毛羽検出をするようにしても、なんら問題はない。
【実施例】
【0071】
以下、実施例によって、本発明の毛羽検出方法について説明する。
毛羽を検出する対象の繊維として、巻取後の総繊度が1670dtex(フィラメント数1000フィラメント)であるパラ型全芳香族ポリアミド繊維(帝人テクノプロダクツ株式会社製、商標名:テクノーラ)からなるマルチフィラメント糸条を用いた。そして、圧縮空気ノズルを通過させて交絡処理した後に、図1に例示したように、糸条の摩擦力で従動駆動されて自由回転する直径がφ20mmのフリーローラ上に前記繊維からなるマルチフィラメント糸条を走行させた。このとき、この糸条の走行速度を200m/分、500m/分、650m/分、1000m/分、そして、1500m/分からなる各水準に設定し、設定した各水準で糸条に発生した毛羽の検出を行った。
【0072】
このとき、レーザー光束を投受光する透過型レーザー光量検出器として、投光器と受光器とがセットになったオムロン(株)製のスマートセンサ(商品名)のレーザータイプを使用した。具体的には、センサーヘッド部の型式:ZX−LT0110、アンプユニット部の型式:ZX−LDA11−Nを使用した。なお、この透過型レーザー光量検出器の投光器からは、波長が650nmの可視光レーザーが発信されるようにされている。
【0073】
その際、投光器と受光器の間の距離を200mmに設定し、その中間附近でローラ上を走行する糸条の糸道に対して、投光器からレーザー光を糸条の走行方向とは逆の方向から投光するように配置した。なお、糸条に投光する一方向へ平行に引き揃えられたレーザー光束は、幅10mm、高さ1mmの矩形面積10mm2を持つものを使用した。ただし、光束形状としては、ローラ上を走行する糸条の断面を完全にカバーすることができる面積以上であることが必要であって、糸条の種類や形状、あるいは製糸条件(糸条の走行速度など)によって変わるが、通常、幅1〜50mm、高さ1〜50mmの矩形が好ましい。
【0074】
つぎに、前記透過型レーザー光量検出器をオムロン(株)製が市販するインターフェースユニット(ZX−SFW11V3)を介して、表計算ソフトウェアがインストールされたマイクロソフト社のOS(Windows(登録商標) XP)を搭載した市販のパソコン(CPUの作動クロック2GHz以上)に接続した。なお、このパソコンには、透過型レーザー光量検出器によって一定のサンプリング時間間隔(0.54msec間隔)で採取された光量データから前述のような方法で毛羽の存在をリアルタイムで認識するためのプログラムを作成して、パソコンに付設されたハードディスク(記憶手段)に記憶させた。
【0075】
このとき、ローラ上を走行する糸条に発生した毛羽の存在を判別するための閾値(発生した毛羽が遮る光量面積値)を1.5mm2に設定した。なお、この閾値は本例では1.5mm2に設定したが、本発明者の実験によれば、0.4〜2.0mm2の範囲、特に好ましくは0.5〜1.0mm2の範囲に設定すれば、ある程度の大きさを有する塊状の毛羽を前述の各水準における糸条の走行速度において良好に検出できることを確認した。
【0076】
以上に述べたような条件において、走行する糸条とレーザー光束の投光器と受光器の距離を離して毛羽の検出を行った結果、感度よく毛羽を検出することができた。このため、走行する糸条に付着した油剤等の流動性のある物質が周囲に多量に飛散しても、レーザー光の投光器と受光器は、これらの飛散物によって汚染されることがなく、長時間感度よく毛羽を検出することができた。
【0077】
以上に述べたようにして毛羽の存在を検出すると、毛羽の存在が確認された時刻と前記毛羽が検出された糸条を巻取った糸条パッケージと発生回数とを記憶しておき、あらかじめ設定した一定長さ当りに発生した毛羽の数によって、不良パッチケージと良好なパッケージを類別した。また、同時に記憶しておいた糸条の走行速度と糸条パッケージの巻き始め時刻から、毛羽検出位置からワインダーにまで毛羽が達するまでの距離を算出した。そして、この距離を考慮した上で、毛羽が発生した糸条を巻取った糸条パッケージのどの位置に毛羽が存在するかを確認するための情報とした。
【図面の簡単な説明】
【0078】
【図1】本発明に係る毛羽検出装置の一実施形態例を示した模式説明図(斜視図)である。
【図2】糸条が走行するローラ上に投光されたレーザー光束の光量変化を検出する有効エリアの模式断面図でもある。
【図3】走行する糸条に発生する毛羽の状態をそれぞれ模式的に例示した説明図である。
【図4】毛羽の存在の有無によってレーザー光が遮られる光量の変化を説明するための図面である。
【符号の説明】
【0079】
1(11,12):ローラ
2:透過型レーザー光量検出器
21:投光器
22:受光器
3:増幅器(アンプ)
4:A/D変換器
5:インターフェース手段
6:データ処理装置
61:記憶手段
62:中央演算処理装置(CPU)
L:レーザー光束
Y:走行糸条
【技術分野】
【0001】
本発明は、走行するマルチフィラメント糸条を構成するフィラメントが切断して生じた毛羽を検出するための装置と方法に関する。
【背景技術】
【0002】
一般に、多数のフィラメント群(単繊維群)から構成されるマルチフィラメント糸条において、何らかの原因で構成するフィラメントが切断されると、切断されたフィラメントの糸端が毛羽として、糸条の表面に現われる。
【0003】
このようにして発生した毛羽は、製糸工程において様々なトラブルの原因となる。また、毛羽の発生部位は、毛羽が発生していない部位と比較して、機械的強度が低下しており、機械的強度が求められる製品においては品質不良となる。さらに、糸条を巻取ったパッケージなどに毛羽が存在すると、外観も良くない。
【0004】
その上、例えば製造工程中に発生した毛羽がガイド等に巻き付いて蓄積されると、糸条の走行に支障を生じさせ、著しい場合には、糸条の走行が不可能になる。しかも、ガイド上に蓄積された毛羽が、徐々にあるいは一気に走行糸条に付着して後工程に流れると、付着した毛羽によって製品品位のさらなる低下を招く。
【0005】
そこで、従来、例えば特許文献1及び2などにおいて、製糸中に毛羽が発生すると、毛羽が発生したことを検出して、前述のような問題が発生することを事前に防止しようとする試みがなされている。しかしながら、これらの何れの従来技術においても、走行している糸条のごく近くに毛羽の発生を検出するための装置を設ける必要がある。
【0006】
すなわち、特許文献1(特開2002−180348号公報)で提案されている技術では、「走行糸条が走行方向を変更する際に生じる遠心力によって走行糸条から毛羽を遊離させ、この毛羽を前記走行糸条の走行路と交差し、かつ接近して配置した毛羽検出装置の毛羽検出先端部に衝突させ、その衝突力によって毛羽を検出する技術」である。
【0007】
また、特許文献2(特開2003−301369号公報)に提案されている技術は、前記特許文献1のように遠心力によって走行糸条から毛羽を分離させるという必要はないが、それでも、発生した毛羽が感知手段に接触したことを検出することには変わりない。したがって、毛羽検出手段を発生した毛羽を検知できるように走行糸条に近接させて設けなければならないことに変わりはない。
【0008】
このように、前述の特許文献1及び2に提案されている従来技術では、断糸の発生あるいは装置メンテナンスなどの要因が生じたり、再糸掛けなどの作業が必要となったりした場合に、作業の妨げとなる毛羽検出装置を作業の妨げとならない位置へ一旦退避させる必要がある。そして、これらの作業が完了してから、退避させた毛羽検出装置を所定の位置へ戻した後に、毛羽検出の再現性などを調整する必要がある。
【0009】
そこで、このような走行糸条に近接させて毛羽検出装置を設置する必要がある接触式毛羽検出技術に代えて、走行糸に光を投射する投光器と、この投光器から投射された光を受光する受光器とを備えた非接触式毛羽検出技術が、例えば特許文献3(特開2004−316055号公報)などに提案されている。なお、この従来技術では、走行糸に発生した毛羽によって遮られて生じる光量変化量によって、毛羽の発生を検知しようとするものである。
【0010】
しかしながら、この従来技術は、ローラの軸方向(すなわち、糸条の走行走行と直角の方向)に、投光器と受光器とを対向配置して毛羽を検出している。このため、走行糸条の速度が100m/分以上と速くなると、走行糸条は一瞬にして光束を横切ってしまうため、光量変化を正常に精度良く検出するのが非常に困難である。このような理由から、この従来技術では、走行糸条の速度は10m/分と極めて低速の領域でしか毛羽検出が良好に行えないという問題がある。
【0011】
また、この従来技術では、高速走行する糸条がローラを出た後の糸条に対して、光量変化を検出するための光を走行糸条に対して投射して毛羽を検出している。このため、走行糸条の糸道がローラによって規制されずに、自由走行するため糸条に振動が生じるという問題がある。
【0012】
この従来技術では、もし、走行糸条に振動が発生すると、振動の影響をうけて,毛羽が存在するにも拘らず、正確に毛羽を検出できないという問題が生じる。特に、100m/分で高速走行する糸条にこのような走行振動が生じると、毛羽の検出が不可能であるとは言わないまでも、非常に困難となる。
【0013】
【特許文献1】特開2002−180348号公報(特許請求の範囲)
【特許文献2】特開2003−301369号公報(特許請求の範囲)
【特許文献3】特開2004−316055号公報(段落[0012]、[0020]及び[0022])
【発明の開示】
【発明が解決しようとする課題】
【0014】
本発明の目的は、上述した従来技術が有する諸問題を解決することにある。すなわち、走行糸条に発生した毛羽の存在を毛羽との接触によって検出する接触式毛羽検出装置を走行糸条に近接させて設ける必要がなく、しかも、100m/分以上の高速で走行する糸条に生じた毛羽であっても、糸条に振動などの影響による誤検出を抑制することにある。そして、高速走行する糸条であっても、安定して毛羽を検出することができる毛羽検出装置と毛羽検出方法を提供することにある。
【課題を解決するための手段】
【0015】
ここに、前記課題を解決するための手段として、下記の(1)〜(10)に記載の毛羽検出装置及び毛羽検出方法が提供される。
【0016】
(1) マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光する投光器と、
予め設定したサンプリング時間間隔毎に前記レーザー光束の光量を一定の面積で受光する受光器と、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を演算して毛羽の検出処理を行うデータ処理装置とを少なくとも備えた毛羽検出装置。
(2) 前記データ処理装置が、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を算出する光量変化算出手段と、
一定の時間間隔毎にサンプリングして算出した前記各光量変化量に対して最新に算出した光量変化量と前回算出した光量変化量との間の差分として光量変化速度をリアルタイムで演算する光量変化速度の演算手段と、
演算された前記光量変化速度が基準値を超えた場合に毛羽の発生と判定するための閾値を記憶する記憶手段と、
前記光量変化速度と前記閾値とを比較するための比較手段と、
比較する光量変化速度が前記閾値を超えた場合に毛羽の発生を検出したと判定する毛羽判定手段とを少なくとも備えた、(1)に記載の毛羽検出装置。
(3) 前記受光器で検出する光量のサンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)で取り込んだN個の光量データの平均値又は総和値によって、各サンプリング時間間隔(ΔT1)で取り込む光量データを代表させるデータ平滑化手段を前記データ処理装置が備えた、(1)又は(2)に記載の毛羽検出装置。
(4) 前記レーザー光が可視光である、(1)〜(3)の何れかに記載の毛羽検出装置。
(5) 前記レーザー光束が矩形の光束である、(1)〜(4)の何れかに記載の毛羽検出装置。
(6) 前記データ処理装置によって毛羽の存在が検出されるたびにその回数をカウントするカウンター手段を備えた、(1)〜(5)の何れかに記載の毛羽検出装置。
(7) 前記データ処理装置によって毛羽の存在が判定された場合にローラ上を走行する糸条を供給する装置に停止信号を発する停止手段を備えた、(1)〜(6)の何れかに記載の毛羽検出装置。
(8) 前記データ処理装置によって毛羽の存在が判定された場合に警報を発する警報手段を備えた、(1)〜(7)のいずれかに記載の毛羽検出装置。
(9) マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光し、
予め設定したサンプリング時間間隔毎に一定面積を有する前記レーザー光束の光量を受光し、
前記毛羽の存在によって遮光されて生じる光量変化量をそれぞれ算出し、
毛羽の存在を判定するために予め設定した閾値と算出された前記光量変化量とを比較し、そして
前記光量変化量が前記閾値を超えた場合に毛羽の発生を検出したと判定することを特徴とする毛羽検出方法。
(10) 前記マルチフィラメント糸条が前記ローラ上を走行する速度が200〜1500m/分である、(9)に記載の毛羽検出方法。
(11) 光量を取り込む前記サンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)でN個の光量データを取り込み、取り込んだN個のデータの平均値又は総和値によって、取り込んだ光量データを平滑化する、(9)又は(10)に記載の毛羽検出方法。
(12) 毛羽の発生が検出された場合にローラ上を走行する糸条の供給を停止することを特徴とする、(9)〜(11)の何れかに記載の毛羽検出方法。
(13) 毛羽の発生が検出された場合に警報を発することを特徴とする、(9)〜(12)の何れかに記載の毛羽検出方法。
(14) 毛羽の存在が確認されるたびに検出回数をカウントし、一定長の糸条中及び/又は巻取後の糸条パッケージ中に存在する毛羽の数をカウントする、(9)〜(13)の何れかに記載の毛羽検出方法。
(15) 毛羽の存在が確認された時刻と前記毛羽が検出された糸条を巻取った糸条パッケージとを記憶し、記憶させた情報を基に糸条パッケージ中に存在する毛羽位置を特定する、(9)〜(14)の何れかに記載の毛羽検出方法。
(16) 前記閾値を数段階に設定し、毛羽が通過する際に遮光された光量の大きさに応じて検出した毛羽の大きさを複数に分類・層別して出力する、(9)〜(15)の何れかに記載の毛羽検出方法。
【発明の効果】
【0017】
先ず、本発明に係る毛羽検出装置と毛羽検出方法によれば、検出対象となる走行糸条は、ローラ上に支持される。したがって、ローラによって規制された一定の糸道上を糸条が走行する。このために、ローラに拘束されずに自由走行する糸条と異なって、糸条に振動が発生しない。
【0018】
したがって、走行糸条は振動せずに実質的に絶えず一定の糸道上を走行するので、走行糸条に対して投光するレーザー光束の位置は常に一定位置を保たれる。このため、糸条が遮る光量は、糸条振動などの外乱の影響を受けず常に安定しており、光量の誤検出が生じ難い。
【0019】
しかも、本発明に係る毛羽検出装置と毛羽検出方法では、レーザー光束を利用した非接触式の毛羽検出方式を採用している。このため、毛羽検出手段を走行糸条と離れた位置に設けることができ、従来技術のように近接して設置する必要がない。
【0020】
そうすると、走行糸条をローラに再糸掛けするような作業が生じた場合に、作業の妨げにならない位置へ毛羽検出装置を一旦退避させなくても、作業の妨げになることはない。また、通常、走行糸条に付与される処理剤などの飛散によって、毛羽検出装置が汚染されたり、破断した糸端が毛羽の検出部に絡みついたりすることもない。
【0021】
さらに、レーザー光束による毛羽検出を行っているため、誤作動が少なく、その上、毛羽の検出精度も向上する。そうすると、発生した毛羽を迅速かつ確実に検出でき、製造した糸条の品質管理を良好に実施することができる。
【発明を実施するための最良の形態】
【0022】
本発明において、毛羽検出の対象となる糸条は、複数のフィラメント(長単繊維)から構成されるマルチフィラメント糸条である。その際、このようなマルチフィラメント糸条の種類としては、通常用いられている天然繊維、半合成繊維、合成繊維など特に限定はない。しかしながら、毛羽の発生は合成繊維の延伸工程などで多発するため、合成繊維を対象とすることが好ましい。具体的には、アクリル繊維、ポリエステル繊維、ナイロン繊維、アラミド繊維、アリレート繊維、又は炭素繊維等を好ましく挙げることができる。
【0023】
以下、図面を参照しながら、本発明に係る毛羽検出装置と毛羽検出方法の実施形態について説明する。
図1は、本発明に係る毛羽検出装置の一実施形態例を示した模式説明図(斜視図)である。この図1において、符号Yは複数のフィラメント(長単繊維)から構成されるマルチフィラメント糸条(以下、単に“糸条”ともいう)であり、この糸条Yは2個のローラ1(11及び12)の上を走行している。また、2は透過型レーザー光量検出器であり、この透過型レーザー光量検出器2は、投光器21及び受光器22を含んで構成されている。
【0024】
以上に述べたように、本発明においては、図1の例に示したように、糸条Yが2個のローラ1(11及び12)上を走行する間は、ローラ1によって走行する糸条Yの糸道が一定に規制される状態にある。そこで、本発明では、このような状態を有効に活用する。すなわち、ローラ1の上を図示した矢印方向へ糸条Yが走行する間は、糸条Yに振動が発生せず、所定の糸道上(ローラ上)を糸条が安定に走行することを利用する。
【0025】
次に、このように、ローラ1の上を安定走行する糸条Yの糸道を間に挟んで、透過型レーザー光量検出器2の投光器21から一定面積を有するレーザー光束L(図には有向点線で示してある)を受光器22に向かって投光する。なお、図1の例では、糸条Yの走行方向に対して逆方向からレーザー光束Lを糸道に対して投光しているが、糸条Yの走行方向と順方向に投光してもよいことは言うまでもない。
【0026】
ここで、本発明においては、前記レーザー光束Lは、一定面積を有しかつ一方向へ引き揃えられた光束であることが必要であって、光が拡散せずに一定面積に集束した光束状態のままで伝播することが必要である。この理由から、本発明では、一方向へ引き揃えられた単一波長を持つレーザー光を糸道へ照射する光として使用することが好ましい。
【0027】
一般に、投光器21に設けられた半導体レーザー光発信器から発せられるレーザー光は、図示省略した投光レンズユニットで平行な光束状態として受光器22に向かって発信される。そして、受光器22側のスリットを通過したレーザー光が受光素子に集光される。
【0028】
このとき、投光器21から投光するレーザー光束Lの形状としては、既に述べたように、光束Lの進行方向に対して直角に切断した場合に、どの位置で光束Lを切断しても光束Lの断面積が一定であることが好ましい。何故ならば,このようにすることによって、投光器21と受光器22との間の設置距離による影響を少なくすることができるからである。
【0029】
すなわち、投光されたレーザー光束Lの平行なエリア内に、レーザー光束Lを遮る物(本発明における「毛羽」)が存在すると、投光器21と受光器22との間の設置距離に関係なく、毛羽が投光器21と受光器22の間に存在する限りにおいて、良好に光量変化を検出することができるからである。これに対して、レーザー光束Lをある焦点距離を持たせて絞ったり、あるいは拡散させたりすると、投光器21及び受光器22の設置位置を微妙に調整する必要が生じ、対象物に遮られて減少した光量変化を良好かつ精度よく検出することができない。
【0030】
以上に述べたようにして、光量検出器2によって検出された光量変化は、通常、例えばアナログ電圧出力のような形で取り出される。ついで、取り出されたアナログ信号(光量信号)は、図1に例示したように、増幅器(アンプ)3、A/D変換器(アナログ信号/デジタル信号変換器)4、インターフェース手段5などを介して、パーソナルコンピュータなどで構成されるデータ処理装置6へデジタル情報として取り込まれる。そして、データ処理装置6に取り込んだデジタル情報をデータ処理することで、走行する糸条Yに発生した毛羽の有無を判別して、毛羽検出を良好かつ精度よく行う。
【0031】
以上に述べたように、データ処理装置6では毛羽Fの存在を判定するためのデータ処理を行う。このデータ処理装置6の具体的な実施態様としては、既に述べたパーソナルコンピュータに限定する必要はないが、通常パーソナルコンピュータなどの市販のコンピュータで構成することができる。
【0032】
ここで、本発明に係る前記データ処理装置6は、記憶手段61、中央演算処理装置(CPU:セントラル・プロセッシング・ユニット)62などを少なくとも備えており、このCPU62によって、受光器22によって検出された光量の比較と光量変化の算出、評価基準値(閾値)と光量変化値との比較による毛羽判定、光量データの平滑化処理などを行う。したがって、CPU62は、前記記憶手段61などと協働しながら、光量変化算出手段、比較手段、毛羽判定手段、そして、データ平滑化手段といった役割を兼ねている。
【0033】
なお、データ処理装置6が備える記憶手段61は、例えばRAM(ランダム・アクセス・メモリー)やROM(リード・オンリー・メモリー)などの半導体記憶素子、あるいは磁気記憶媒体などで構成されるハードディスクなどから構成されている。そして、これら記憶手段61に、検出した光量定法などの必要情報や毛羽検出処理を行うために必要とされるプログラムなどを記憶させておく。
【0034】
そうすると、この記憶手段61に記憶されたプログラムを実行することによって、前述のインターフェース手段5などを介して、受光器22によって取り込まれた光量に係るデジタル化されたデータを処理することができる。このようにして、本発明においては、データ処理によって走行糸条Yに生じた毛羽Fの存在を判定する。
【0035】
以下、本発明の一大特徴である前記「光量変化を検出して、走行糸条Yに発生した毛羽を検出する処理」について、図2〜図4を参照しながら詳細に説明する。
図2は、投光器21が備えるレンズ系によって一方向に平行に引き揃えられたレーザ光束Lを、図1に示したローラ11の上を走行する糸条Yの糸道に対して投光し、投光されたレーザー光束Lを受光器22に設けられたスリット(例えば幅10mm、高さ1mm)から受光素子に取り込む場合の実施形態例を示した模式説明図である。また、この図2は、糸条Yが走行するローラ11上に投光されたレーザー光束Lの光量変化を検出する有効エリア(図2において、一点鎖線で示した)の模式断面図でもある。
【0036】
なお、図2に示したように、走行糸条Yは複数のフィラメント群から構成されている。このため、ローラ11上を走行するフィラメント群は、ローラ11に押圧されて、ローラ11上で潰されたように扁平状態に広がった状態となる。なお、付言しておくと、この図2の例では、走行糸条Yには毛羽が未だ発生していない状態を示している。この例のように毛羽が発生していない糸条Yがローラ11上を走行する場合は、受光器22によって検出される光量は、外乱などの影響によって多少変化するものの、ほとんど変化しないで、ほぼ一定の水準で推移する。
【0037】
ところで、光量変化を検出するレーザー光束Lの有効エリア(光束Lの横断面積)は、例えば幅10mm、高さ1mm程度の矩形エリアとして設定することができる。なお、この寸法は前述の受光器22に設けられたスリット形状によって任意に設定することができる。しかしながら、この有効エリアの設定は、製糸条件などに対応させて予め実験などによって最適な値を選定し、この選定した最適値に設定することが必要であることはいうまでもない。
【0038】
本発明において、前記有効エリアの幅方向長さを高さ方向長さよりも大きくしているのは、次のような理由による。すなわち、既に述べたように、糸条Yは、ローラ11上の所定の糸道上を扁平形状で走行する。したがって、走行糸条Yには、糸道の上下方向に対しては振動が生じないが、糸道の幅方向にはローラ11から何らの規制も受けない。このため、この幅方向に対しては、糸条Yが走行する糸道がある程度ずれる可能性が充分にあるので、この点を考慮した結果である。
【0039】
次に、前記図2に例示したような毛羽が存在しない状態で走行する糸条Yにおいて、毛羽が発生した場合について、図3及び図4を参照しながら、毛羽を検出する方法について詳細に説明する。なお、図3において、符号Fは毛羽を示しており、この例では前記毛羽Fが絡み合って塊状となった状態であることを示している。
【0040】
ここで、図3において、図3(a)は、図2と同様に、まだ毛羽Fが発生していない正常状態、図3(b)は毛羽Fが走行糸条Yの右側部に発生している状態、図3(c)は毛羽Fが走行糸条Yの右側部及び左側部にそれぞれ発生している状態、図3(d)は毛羽Fが走行糸条Yの上部に発生している状態、そして、図3(e)は毛羽Fが走行糸条Yの下部に糸条Yとローラ1とに挟まれて発生している状態をそれぞれ示している。
【0041】
この図3において、その詳細は後述するが、図3(b)及び(c)のケースは、良好に毛羽Fの存在を検出できる場合である。また、図3(d)のケースは、図示した状態では毛羽Fの検出は正常に行えないが、毛羽検出装置の設定を変更すれば毛羽Fの検出を行える場合である。そして、図3(e)のケースは、毛羽Fが糸条Yに巻き込まれてしまっているため、毛羽Fの検出が難しい場合である。
【0042】
なお、図3(d)のケースは、毛羽Fの検出を行うための有効な範囲から毛羽Fの存在位置が外れているために、毛羽Fの検出が行えないケースである。しかしながら、毛羽Fの検出範囲を更に上部にまで拡げることによって、毛羽Fを良好に検出することができる。つまり、このケースでは、毛羽Fの検出範囲を高さ方向にまで拡げることによって、毛羽Fの検出が可能となる。
【0043】
以上に述べたように、本発明では、ローラ1上を走行する糸条Yに存在する毛羽を検出することを一大特徴とする。このとき、走行糸条Yはローラ1によって支持されているために、その動きが糸道上に規制されて、上下に振動することがない。そうすると、糸条Yの振動から開放されて、より外乱が少ない状態で毛羽Fの検出を安定かつ精度よく行うことができる。
【0044】
なお、糸条Yが走行するローラ1は、糸条Yが安定に走行するのに十分な直径、幅、強度を有していればその素材、表面状態等を特に限定する必要はない。また、糸条Yが走行するローラ1は、糸条Yとの摩擦力によって従動駆動するフリーローラであっても、電動機などによって強制的に駆動される強制駆動ローラであってもよい。
【0045】
しかしながら、回転しない固定状態のローラである場合には、走行糸条とローラとの間の摩擦が大きくなって、毛羽を発生させてしまうため好ましくなく、好ましいのは毛羽Fが発生しない製糸条件の場合のみである。ただし、走行糸条Yにダメージを与えないという条件を満足する限りにおいて、固定ローラあるいは固定ガイドであっても、特に制限する理由はない。
【0046】
次に、図4について説明すると、受光器22が受光する一定面積の有効エリア内へ投光された全光量に対し、遮られて受光器22まで到達しなかった光量の割合を示す棒グラフであって、左側の棒グラフは毛羽Fが存在しない場合、右側の棒グラフは毛羽Fが存在する場合をそれぞれ示している。
【0047】
この図4に示した左側の棒グラフから明らかなように、受光器22まで到達しなかった光量は、走行糸条Yに毛羽Fが存在しない場合には、ローラ11によって遮られた光量と糸条Yが遮った光量の合計量となり、これら遮られた合計光量を差し引いた光量が受光器22によって検出される。
【0048】
これに対して、図4に示した右側の棒グラフのように、走行糸条Yに毛羽Fが発生すると、この毛羽Fによって遮られる光量が、更に受光器22まで到達しないことになる。したがって、この場合には、受光器22が受光する光量は、右側の棒グラフの場合よりも、毛羽Fによって遮られた光量分だけ減少する。
【0049】
そこで、本発明に係る毛羽検出装置及び毛羽検出方法では、以下に述べるようにして、受光器22が検出した光量から、毛羽Fの存在によって遮られた光量変化量をデータ処理装置6で算出する。そして、算出した光量の変化量が閾値を超えた場合に、毛羽Fが存在すると判定し、閾値を超えなかった場合には毛羽Fは存在しないと判定する。
【0050】
なお、この毛羽判定は、以下に述べるステップに基づいて行われる。
まず、予め設定したサンプリング時間間隔(ΔT1)毎に投光されたレーザー光束Lを受光器22によって受光する。そして、受け取った光量(例えば、アナログ電圧値)を必要に応じて増幅器(アンプ)3によって増幅した後、A/D変換器4を通してデジタル信号に変換する。ついで、インターフェース手段5を介してデータ処理装置6に取り込む。
【0051】
なお、前記サンプリング時間間隔(ΔT1)は、毛羽の検出処理が充分に可能な時間間隔に設定されるという条件付きで、毛羽検出の速度を上げるためにできるだけ短いことが好ましいことは言うまでもない。このサンプリング時間間隔(ΔT1)は、本発明者が行った実験の範囲内ではあるが、糸条Yの走行速度(100〜3000m/分)も考慮した上で、0.6〜2.0 msecの範囲に設定することが好ましいことが分かっている。
【0052】
また、本発明においては、一定のサンプリング時間間隔(ΔT1)の間に、このサンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)を設定する。そして、設定した時間間隔(ΔT2)毎にN個の光量データ群をサンプリングして前記記憶手段61に逐次記憶することが好ましい。したがって、ΔT1とΔT2は、ΔT2=ΔT1/Nという関係式を満たすことになる。
【0053】
ついで、サンプリング時間間隔(ΔT1)をN分割する時間間隔(ΔT2)の間に、CPU62(データ平滑化手段)によって取り込んだN個の光量データの平均値を求めて、この光量平均値をサンプリング時間間隔(ΔT1)の光量データとして代表させる。なお、この場合、平均値の計算に代えて、時間間隔ΔT2毎に得られた光量の総和を算出し、この総和を代表させるようにしても構わない。
【0054】
このようにすることによって、短時間間隔(ΔT2)で光量データを採取した際に、大きなノイズが混入して、毛羽Fが発生していないにもかかわらず、毛羽Fが存在してしまうといった誤検出が少なくなる。また、糸条Yの微振動による影響などの本来検出すべき毛羽の存在以外の要因で毛羽検出装置が誤作動してしまう可能性も激減させることができる。
【0055】
その結果、毛羽Fの検出誤作動を回避することができ、精度よく安定に精確な光量変化を算出することができる。したがって、糸条Yの品質管理上は勿論のこと、毛羽検出装置の自体の操作や微調整などに要する無駄な手間が省ける点においても好ましい。
【0056】
なお、ΔT1/ΔT2は、2〜10とすることが好ましい。何故ならば、ΔT1/ΔT2が1であれば、短サンプリング時間間隔(ΔT2)を設定する意義が全くないからである。逆に、ΔT1/ΔT2が10を超えると、実際に毛羽Fが検出されても、毛羽Fの大きさが小さい場合に、せっかく毛羽Fを検出したにも拘らず、多くの光量データの中に検出した毛羽Fの光量が埋没されてしまって、その寄与が薄められてしまう。そうすると、逆に毛羽Fを検出したにも拘らず、検出しなかったという誤作動を起こす可能性が出てくる。
【0057】
この場合、糸条Yが走行する速度を遅く設定し、時間間隔をより短くするほど、よりきめ細かな毛羽Fの検出を期待することができる。しかしながら、糸条Yの生産性を確保した上で、毛羽Fの検出限界(分解能)を考慮すると、糸条Yの走行速度は100m/分以上であり、好ましくは100〜3000m/分であり、特に好ましい範囲は、200〜1500m/分である。
【0058】
次に、以上に述べた一定の短サンプリング時間間隔(ΔT2)でデータ処理装置6に取り込まれた光量データは、逐次記憶手段61に記憶され、これと共に、サンプリング時間間隔(ΔT1)毎の代表光量データが算出される。このようにして、サンプリング時間間隔(ΔT1)毎の代表光量データが算出されると、CPU62(光量変化算出手段)は、最新の代表光量値が毛羽Fの存在によって変化しているか否かを判断する。そのために、最新の代表光量値と最新よりも1ステップ前(最新よりも一つ前のデータサンプリング時)に算出された代表光量値とを記憶手段61から読み出して、これらの光量値を減算して光量変化量をリアルタイムで算出する。
【0059】
つまり、通常、毛羽Fがレーザー光束Lを遮らない場合(毛羽が存在しない場合)は、図4の左側の棒グラフに例示したように、糸条(Y)とローラ(11)とが遮った光量の合計は、外乱要因からなる微小変動を除いて殆ど変化せずに一定に推移する。したがって、CPU62(光量変化算出手段)によって算出される光量変化量は殆どゼロに近い値をとる。
【0060】
しかしながら、図4の右側の棒グラフに示したように、毛羽Fが存在すると、毛羽Fによって遮られた光量分だけ受光器22が取り込む光量が少なくなる。そうすると、既に述べたように、毛羽Fによって遮られた光量分だけが光量変化量として、CPU62(光量変化算出手段)によってその違いが算出される。
【0061】
したがって、光量変化が判定基準値(閾値)を超えるレベルで検出された場合に、毛羽Fが存在すると判定できる。このように、算出された光量変化量が判定基準値よりも小さい値であった場合に、毛羽Fが存在するとして判定することの利点は、毛羽Fの存在以外の原因によって、わずかでも光量が変化すると、これによって毛羽Fを誤って検出してしまうという誤検出が生じるのを回避できることである。
【0062】
そこで、図4の左側の棒グラフに点線で囲んだように、毛羽Fの存在を判定するための基準値となる“毛羽判定用の閾値”を設けて、これを前記記憶手段61に記憶させておく。そして、CPU62(光量変化算出手段)によってサンプリングされた光量データから算出した光量変化量と、記憶手段61に記憶させておいた前記閾値とをCPU62(比較手段)によって比較する。この比較の結果、算出された光量変化量が前記閾値を超えた場合にCPU62(毛羽判定手段)によって毛羽Fが検出されたと判断する。
【0063】
その際、閾値を超えなかった場合には、毛羽Fが検出されなかったと判断される。したがって、閾値の設定は、注意深く行う必要がある。通常、最適な閾値の設定は充分な実験によって毛羽Fの誤検出が少なくなる値を探し出して、最適な値に設定することが望ましい。
【0064】
このとき、毛羽判定手段によって毛羽Fの存在が確認されるたびに、その回数をカウントするカウンター手段を毛羽検出装置が備えることが好ましい。このようにして、一定長の糸条Y中あるいは巻取後の糸条パッケージ中に存在する毛羽Fの数を正確にカウントする。そして、カウントした回数を前記記憶手段に記憶させて、この情報を取り出し可能とするようにすることは好ましい実施態様である。
【0065】
更に、前記閾値を数段階に設定し、毛羽Fが通過する際に遮光された光量の大きさに応じて検出した毛羽の大きさを複数に分類・層別して出力することも好ましい実施態様である。具体的には、例えば品質に甚大な影響を及ぼす大きさの毛羽F、中程度の影響を及ぼす大きさの毛羽F、小程度の影響を及ぼす大きさの毛羽Fと言ったように3段階に分類し、毛羽Fの大きさの程度により、毛羽Fが検出された糸条Y毎に適切な処置を実施することができるようにすることが好ましい。
【0066】
また、毛羽検出装置には、走行する糸条Yの走行開始時間、走行速度、毛羽Fを検出した時間を毛羽検出と連動して前述の記憶手段61に記憶させるようにすることも好ましい実施態様である。この場合、記憶させた数値を基にワインダーなどで巻き取られた後の糸条パッケージのどの位置に毛羽検出装置によって検出された毛羽Fが存在しているかを容易に特定することができる。そうすると、例えば後で糸条パッケージから糸条を巻き出した際に、目視等により容易に毛羽Fの発生位置を特定することができる。
【0067】
更に、本発明においては、データ処理装置6によって毛羽の存在が判定された場合に、走行する糸条をローラ1へ供給する駆動装置(図示せず)を停止する停止信号を発する停止手段を備えていることも好ましい。何故ならば、糸条の走行を停止することにより、毛羽の存在する糸条とそうでない糸条の層別を容易かつ早急にすることができ、糸条の品質管理において好ましいからである。
【0068】
また、前記データ処理装置6によって毛羽の存在が判定された場合に、警報を発する警報装置(図示せず)を備えていることも好ましい。何故ならば、警報を発することにより、巻き取られた糸条パッケージ単位で、毛羽の存在する糸条パッケージとそうでない糸条パッケージの層別を容易かつ早急にすることができ、糸条の品質管理において好ましいからである。なお、警報は警報音、光を点灯または点滅させる警報灯、あるいは有線又は無線の通信機器を用いて警報信号を送信する警報通信器なども含まれる。
【0069】
また、本発明によると、定期的に毛羽検出装置を清掃する手間も省くことができ、且つ長時間の連続運転が可能になった。しかも、走行糸条及びローラなどの回転体から離れた位置に毛羽検出装置を設けることができ、再糸掛けなどの再に作業の妨げとなるとして作業の支障となる位置にまで退避させる必要も無くなった。
【0070】
以上に説明した実施態様において、ローラ1上を走行する糸条Yの本数が1本の場合について説明したが、複数本の糸条がローラ1上走行する場合であっても構わない。例えば、こきのような場合には、各糸条が走行する糸道毎に本発明に係る毛羽検出装置を設けて、毛羽検出をするようにしても、なんら問題はない。
【実施例】
【0071】
以下、実施例によって、本発明の毛羽検出方法について説明する。
毛羽を検出する対象の繊維として、巻取後の総繊度が1670dtex(フィラメント数1000フィラメント)であるパラ型全芳香族ポリアミド繊維(帝人テクノプロダクツ株式会社製、商標名:テクノーラ)からなるマルチフィラメント糸条を用いた。そして、圧縮空気ノズルを通過させて交絡処理した後に、図1に例示したように、糸条の摩擦力で従動駆動されて自由回転する直径がφ20mmのフリーローラ上に前記繊維からなるマルチフィラメント糸条を走行させた。このとき、この糸条の走行速度を200m/分、500m/分、650m/分、1000m/分、そして、1500m/分からなる各水準に設定し、設定した各水準で糸条に発生した毛羽の検出を行った。
【0072】
このとき、レーザー光束を投受光する透過型レーザー光量検出器として、投光器と受光器とがセットになったオムロン(株)製のスマートセンサ(商品名)のレーザータイプを使用した。具体的には、センサーヘッド部の型式:ZX−LT0110、アンプユニット部の型式:ZX−LDA11−Nを使用した。なお、この透過型レーザー光量検出器の投光器からは、波長が650nmの可視光レーザーが発信されるようにされている。
【0073】
その際、投光器と受光器の間の距離を200mmに設定し、その中間附近でローラ上を走行する糸条の糸道に対して、投光器からレーザー光を糸条の走行方向とは逆の方向から投光するように配置した。なお、糸条に投光する一方向へ平行に引き揃えられたレーザー光束は、幅10mm、高さ1mmの矩形面積10mm2を持つものを使用した。ただし、光束形状としては、ローラ上を走行する糸条の断面を完全にカバーすることができる面積以上であることが必要であって、糸条の種類や形状、あるいは製糸条件(糸条の走行速度など)によって変わるが、通常、幅1〜50mm、高さ1〜50mmの矩形が好ましい。
【0074】
つぎに、前記透過型レーザー光量検出器をオムロン(株)製が市販するインターフェースユニット(ZX−SFW11V3)を介して、表計算ソフトウェアがインストールされたマイクロソフト社のOS(Windows(登録商標) XP)を搭載した市販のパソコン(CPUの作動クロック2GHz以上)に接続した。なお、このパソコンには、透過型レーザー光量検出器によって一定のサンプリング時間間隔(0.54msec間隔)で採取された光量データから前述のような方法で毛羽の存在をリアルタイムで認識するためのプログラムを作成して、パソコンに付設されたハードディスク(記憶手段)に記憶させた。
【0075】
このとき、ローラ上を走行する糸条に発生した毛羽の存在を判別するための閾値(発生した毛羽が遮る光量面積値)を1.5mm2に設定した。なお、この閾値は本例では1.5mm2に設定したが、本発明者の実験によれば、0.4〜2.0mm2の範囲、特に好ましくは0.5〜1.0mm2の範囲に設定すれば、ある程度の大きさを有する塊状の毛羽を前述の各水準における糸条の走行速度において良好に検出できることを確認した。
【0076】
以上に述べたような条件において、走行する糸条とレーザー光束の投光器と受光器の距離を離して毛羽の検出を行った結果、感度よく毛羽を検出することができた。このため、走行する糸条に付着した油剤等の流動性のある物質が周囲に多量に飛散しても、レーザー光の投光器と受光器は、これらの飛散物によって汚染されることがなく、長時間感度よく毛羽を検出することができた。
【0077】
以上に述べたようにして毛羽の存在を検出すると、毛羽の存在が確認された時刻と前記毛羽が検出された糸条を巻取った糸条パッケージと発生回数とを記憶しておき、あらかじめ設定した一定長さ当りに発生した毛羽の数によって、不良パッチケージと良好なパッケージを類別した。また、同時に記憶しておいた糸条の走行速度と糸条パッケージの巻き始め時刻から、毛羽検出位置からワインダーにまで毛羽が達するまでの距離を算出した。そして、この距離を考慮した上で、毛羽が発生した糸条を巻取った糸条パッケージのどの位置に毛羽が存在するかを確認するための情報とした。
【図面の簡単な説明】
【0078】
【図1】本発明に係る毛羽検出装置の一実施形態例を示した模式説明図(斜視図)である。
【図2】糸条が走行するローラ上に投光されたレーザー光束の光量変化を検出する有効エリアの模式断面図でもある。
【図3】走行する糸条に発生する毛羽の状態をそれぞれ模式的に例示した説明図である。
【図4】毛羽の存在の有無によってレーザー光が遮られる光量の変化を説明するための図面である。
【符号の説明】
【0079】
1(11,12):ローラ
2:透過型レーザー光量検出器
21:投光器
22:受光器
3:増幅器(アンプ)
4:A/D変換器
5:インターフェース手段
6:データ処理装置
61:記憶手段
62:中央演算処理装置(CPU)
L:レーザー光束
Y:走行糸条
【特許請求の範囲】
【請求項1】
マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光する投光器と、
予め設定したサンプリング時間間隔毎に前記レーザー光束の光量を一定の面積で受光する受光器と、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を演算して毛羽の検出処理を行うデータ処理装置とを少なくとも備えた毛羽検出装置。
【請求項2】
前記データ処理装置が、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を算出する光量変化算出手段と、
一定の時間間隔毎にサンプリングして算出した前記各光量変化量に対して最新に算出した光量変化量と前回算出した光量変化量との間の差分として光量変化速度をリアルタイムで演算する光量変化速度の演算手段と、
演算された前記光量変化速度が基準値を超えた場合に毛羽の発生と判定するための閾値を記憶する記憶手段と、
前記光量変化速度と前記閾値とを比較するための比較手段と、
比較する光量変化速度が前記閾値を超えた場合に毛羽の発生を検出したと判定する毛羽判定手段とを少なくとも備えた、請求項1に記載の毛羽検出装置。
【請求項3】
前記受光器で検出する光量のサンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)で取り込んだN個の光量データの平均値又は総和値によって、各サンプリング時間間隔(ΔT1)で取り込む光量データを代表させるデータ平滑化手段を前記データ処理装置が備えた、請求項1又は請求項2に記載の毛羽検出装置。
【請求項4】
前記レーザー光が可視光である、請求項1〜3の何れかに記載の毛羽検出装置。
【請求項5】
前記レーザー光束が一定面積を有する矩形の光束である、請求項1〜4の何れかに記載の毛羽検出装置。
【請求項6】
前記データ処理装置によって毛羽の存在が検出されるたびにその回数をカウントするカウンター手段を備えた、請求項1〜5の何れかに記載の毛羽検出装置。
【請求項7】
前記データ処理装置によって毛羽の存在が判定された場合にローラ上を走行する糸条を供給する装置に停止信号を発する停止手段を備えた、請求項1〜6の何れかに記載の毛羽検出装置。
【請求項8】
前記データ処理装置によって毛羽の存在が判定された場合に警報を発する警報手段を備えた、請求項1〜7のいずれかに記載の毛羽検出装置。
【請求項9】
マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光し、
予め設定したサンプリング時間間隔毎に一定面積を有する前記レーザー光束の光量を受光し、
前記毛羽の存在によって遮光されて生じる光量変化量をそれぞれ算出し、
毛羽の存在を判定するために予め設定した閾値と算出された前記光量変化量とを比較し、そして
前記光量変化量が前記閾値を超えた場合に毛羽の発生を検出したと判定することを特徴とする毛羽検出方法。
【請求項10】
前記マルチフィラメント糸条が前記ローラ上を走行する速度が200〜1500m/分である、請求項9に記載の毛羽検出方法。
【請求項11】
光量を取り込む前記サンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)でN個の光量データを取り込み、取り込んだN個のデータの平均値又は総和値によって、取り込んだ光量データを平滑化する、請求項9又は請求項10に記載の毛羽検出方法。
【請求項12】
毛羽の発生が検出された場合にローラ上を走行する糸条の供給を停止することを特徴とする、請求項9〜11の何れかに記載の毛羽検出方法。
【請求項13】
毛羽の発生が検出された場合に警報を発する、請求項9〜12の何れかに記載の毛羽検出方法。
【請求項14】
毛羽の存在が確認されるたびに検出回数をカウントし、一定長の糸条中及び/又は巻取後の糸条パッケージ中に存在する毛羽の数をカウントする、請求項9〜13の何れかに記載の毛羽検出方法。
【請求項15】
毛羽の存在が確認された時刻と前記毛羽が検出された糸条を巻取った糸条パッケージとを記憶し、記憶させた情報を基に糸条パッケージ中に存在する毛羽位置を特定する、請求項9〜14の何れかに記載の毛羽検出方法。
【請求項16】
前記閾値を数段階に設定し、毛羽が通過する際に遮光された光量の大きさに応じて検出した毛羽の大きさを複数に分類・層別して出力する、請求項9〜15の何れかに記載の毛羽検出方法。
【請求項1】
マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光する投光器と、
予め設定したサンプリング時間間隔毎に前記レーザー光束の光量を一定の面積で受光する受光器と、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を演算して毛羽の検出処理を行うデータ処理装置とを少なくとも備えた毛羽検出装置。
【請求項2】
前記データ処理装置が、
前記受光器で受光したレーザー光束の光量から前記毛羽の存在によって遮光されて生じる光量変化量を算出する光量変化算出手段と、
一定の時間間隔毎にサンプリングして算出した前記各光量変化量に対して最新に算出した光量変化量と前回算出した光量変化量との間の差分として光量変化速度をリアルタイムで演算する光量変化速度の演算手段と、
演算された前記光量変化速度が基準値を超えた場合に毛羽の発生と判定するための閾値を記憶する記憶手段と、
前記光量変化速度と前記閾値とを比較するための比較手段と、
比較する光量変化速度が前記閾値を超えた場合に毛羽の発生を検出したと判定する毛羽判定手段とを少なくとも備えた、請求項1に記載の毛羽検出装置。
【請求項3】
前記受光器で検出する光量のサンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)で取り込んだN個の光量データの平均値又は総和値によって、各サンプリング時間間隔(ΔT1)で取り込む光量データを代表させるデータ平滑化手段を前記データ処理装置が備えた、請求項1又は請求項2に記載の毛羽検出装置。
【請求項4】
前記レーザー光が可視光である、請求項1〜3の何れかに記載の毛羽検出装置。
【請求項5】
前記レーザー光束が一定面積を有する矩形の光束である、請求項1〜4の何れかに記載の毛羽検出装置。
【請求項6】
前記データ処理装置によって毛羽の存在が検出されるたびにその回数をカウントするカウンター手段を備えた、請求項1〜5の何れかに記載の毛羽検出装置。
【請求項7】
前記データ処理装置によって毛羽の存在が判定された場合にローラ上を走行する糸条を供給する装置に停止信号を発する停止手段を備えた、請求項1〜6の何れかに記載の毛羽検出装置。
【請求項8】
前記データ処理装置によって毛羽の存在が判定された場合に警報を発する警報手段を備えた、請求項1〜7のいずれかに記載の毛羽検出装置。
【請求項9】
マルチフィラメント糸条を構成するフィラメントが切断されて生じた毛羽を検出するために、ローラ上を走行する前記糸条の糸道方向に対して、一方向へ平行に引き揃えられたレーザー光束を投光し、
予め設定したサンプリング時間間隔毎に一定面積を有する前記レーザー光束の光量を受光し、
前記毛羽の存在によって遮光されて生じる光量変化量をそれぞれ算出し、
毛羽の存在を判定するために予め設定した閾値と算出された前記光量変化量とを比較し、そして
前記光量変化量が前記閾値を超えた場合に毛羽の発生を検出したと判定することを特徴とする毛羽検出方法。
【請求項10】
前記マルチフィラメント糸条が前記ローラ上を走行する速度が200〜1500m/分である、請求項9に記載の毛羽検出方法。
【請求項11】
光量を取り込む前記サンプリング時間間隔(ΔT1)をN(N:正の整数)等分する時間間隔(ΔT2)でN個の光量データを取り込み、取り込んだN個のデータの平均値又は総和値によって、取り込んだ光量データを平滑化する、請求項9又は請求項10に記載の毛羽検出方法。
【請求項12】
毛羽の発生が検出された場合にローラ上を走行する糸条の供給を停止することを特徴とする、請求項9〜11の何れかに記載の毛羽検出方法。
【請求項13】
毛羽の発生が検出された場合に警報を発する、請求項9〜12の何れかに記載の毛羽検出方法。
【請求項14】
毛羽の存在が確認されるたびに検出回数をカウントし、一定長の糸条中及び/又は巻取後の糸条パッケージ中に存在する毛羽の数をカウントする、請求項9〜13の何れかに記載の毛羽検出方法。
【請求項15】
毛羽の存在が確認された時刻と前記毛羽が検出された糸条を巻取った糸条パッケージとを記憶し、記憶させた情報を基に糸条パッケージ中に存在する毛羽位置を特定する、請求項9〜14の何れかに記載の毛羽検出方法。
【請求項16】
前記閾値を数段階に設定し、毛羽が通過する際に遮光された光量の大きさに応じて検出した毛羽の大きさを複数に分類・層別して出力する、請求項9〜15の何れかに記載の毛羽検出方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−162153(P2007−162153A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−357779(P2005−357779)
【出願日】平成17年12月12日(2005.12.12)
【出願人】(303013268)帝人テクノプロダクツ株式会社 (504)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月12日(2005.12.12)
【出願人】(303013268)帝人テクノプロダクツ株式会社 (504)
【Fターム(参考)】
[ Back to top ]