
気動車用エンジン制御装置
【課題】補機の動作状態の変動(補機駆動力の変動)にかかわらず、走行用駆動力の変動を抑制して安定した加速力を得ることが可能な気動車用エンジン制御装置を提供する。
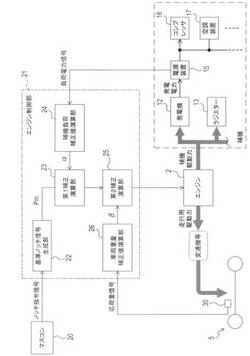
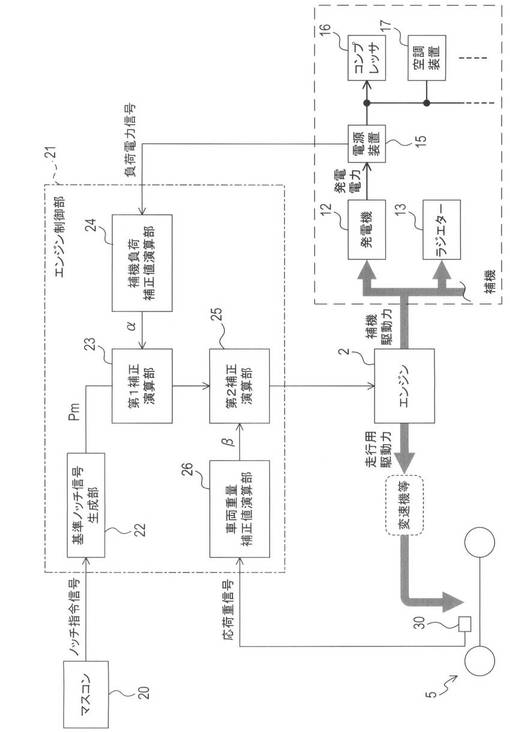
【解決手段】エンジン制御部21において、基準ノッチ信号生成部22は、マスコン20からのノッチ指令信号に対応した所定の基準ノッチ信号Pmを出力する。一方、各種補機のうちコンプレッサ16や空調装置17等の電気負荷の消費電力を示す情報が、電源装置15から負荷電力信号として入力され、また、車両重量を示す情報が、応荷重センサ30から応荷重信号として入力される。エンジン制御部21は、負荷電力信号に基づく補機負荷補正値α及び応荷重信号に基づく車両重量補正値βに従い、マスコン20のノッチに対応した目標加速力が得られるように基準ノッチ信号Pmを補正し、その補正後の基準ノッチ信号Pmを制御ノッチ信号としてエンジン2へ出力する。
【解決手段】エンジン制御部21において、基準ノッチ信号生成部22は、マスコン20からのノッチ指令信号に対応した所定の基準ノッチ信号Pmを出力する。一方、各種補機のうちコンプレッサ16や空調装置17等の電気負荷の消費電力を示す情報が、電源装置15から負荷電力信号として入力され、また、車両重量を示す情報が、応荷重センサ30から応荷重信号として入力される。エンジン制御部21は、負荷電力信号に基づく補機負荷補正値α及び応荷重信号に基づく車両重量補正値βに従い、マスコン20のノッチに対応した目標加速力が得られるように基準ノッチ信号Pmを補正し、その補正後の基準ノッチ信号Pmを制御ノッチ信号としてエンジン2へ出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ディーゼル機関等のエンジン(内燃機関)を走行用駆動源として走行する気動車に用いられる、気動車用エンジン制御装置に関する。
【背景技術】
【0002】
従来、気動車のエンジンは、運転士が操作する主幹制御器(マスターコントローラ。以下「マスコン」という)からのノッチ指令に従い、エンジン出力がそのノッチ指令に応じた所望の値となるように制御される。例えば1ノッチなら、1ノッチに対応した所定の駆動力がエンジンから出力されるよう、エンジンへ供給・噴射される燃料の量が制御される。つまり、エンジン出力はノッチに応じて段階的に切り替えられるのである。
【0003】
そして、このように制御されたエンジンからの出力が、液体変速機や終減速機等を介して車軸・車輪に伝達され、これにより気動車が走行する。
ところで、気動車においては、エンジンから出力される駆動力は、走行用の駆動源としてだけでなく、空気圧縮機や空調装置、その他電気機器などの各種車載機器(以下「補機」ともいう) の駆動源としても用いられる。これら補機としては、エンジンから出力される機械エネルギーをそのまま利用して動作するものもあれば、発電機により機械エネルギーを電力に変換してその電力により動作するものもある。
【0004】
このような、走行用と補機駆動用の双方に出力が用いられる気動車のエンジンに対しては、エンジン自体の性能向上、延いては気動車全体の性能向上のために種々の制御方法が提案されている。例えば特許文献1には、複数のエンジンを有する気動車(列車)において、列車の必要とする負荷に応じ、燃費が最小となるように各エンジンを個別に制御する技術が記載されている。
【0005】
また、特許文献2には、複数のエンジンが搭載された気動車において、特定エンジンの劣化防止や良好な燃費状態の維持を目的として、エンジンの負荷に応じてエンジンの稼働数を決定すると共に、実際に稼働させるエンジンを変更することで各エンジンの使用頻度が略同一となるように制御する技術が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−198102号公報
【特許文献2】特開2005−83218号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、エンジン出力が走行用と補機駆動用の双方に用いられるが故に、上記各特許文献1,2に記載の技術では解決できない問題がある。それは、エンジン出力全体のうち液体変速機へ入力されて走行用駆動源として用いられる駆動力(以下「走行用駆動力」という)が、補機の動作状態によって変動してしまい、これにより安定した加速力が得られなくなるということである。
【0008】
即ち、走行用駆動力は、エンジン出力全体から、補機へ入力されて補機駆動源として用いられる駆動力(以下「補機駆動力」)を差し引いた分となることから、補機の動作状態が変動することによって補機駆動力が変動すると、それに応じて走行用駆動力も変動してしまう。そのため、補機駆動力の変動によって車両の加速力が変動し、安定した運転取り扱いの実現が困難であった。
【0009】
また、車両の加速力の変動は、補機の動作状態の変動以外にも、例えば車両重量の変動など、他の各種の車両状態の変動によっても生じうる。
本発明は上記課題に鑑みなされたものであり、車両状態の変動(補機駆動力の変動等)にかかわらず安定した加速力を得ることが可能な気動車用エンジン制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するためになされた請求項1に記載の発明は、エンジンを走行用駆動源として有すると共に、該エンジンを駆動源として動作する少なくとも1つの車載機器を有する気動車において、該エンジンを制御する気動車用エンジン制御装置である。
【0011】
エンジンは、異なる所定数の制御指令信号の何れかが入力され、制御指令信号毎に所定の目標加速力を発生させるために段階的に設定された基準エンジン出力のうち入力された制御指令信号に対応した基準エンジン出力を発生するよう構成されている。
【0012】
各基準エンジン出力は、気動車において、少なくとも車載機器の動作状態を含む、気動車の加速力に影響する加速力関連状態が、所定の基準状態である場合に、対応する目標加速力が得られるよう設定されている。
【0013】
そして、当該気動車用エンジン制御装置は、操作指令手段と、制御指令信号生成手段と、機器駆動力検出手段とを備えている。
操作指令手段は、エンジンへ各制御指令信号の何れかを選択的に出力するために操作され、各制御指令信号に対応した所定数の操作指令信号のうち上記操作により選択された何れかの操作指令信号を出力する。
【0014】
制御指令信号生成手段は、操作指令信号毎に、対応する制御指令信号が基準指令信号として予め設定されていると共に、操作指令手段から入力された操作指令信号に対応した基準指令信号を制御指令信号としてエンジンへ出力する。
【0015】
機器駆動力検出手段は、車載機器のうち少なくとも1つを検出対象機器として、エンジンから出力される基準エンジン出力のうちその検出対象機器の駆動源として用いられている分である機器駆動力を直接又は間接的に検出する。
【0016】
また、加速力関連状態として、少なくとも機器駆動力が含まれ、その機器駆動力に対する基準状態とは、その機器駆動力が所定の機器駆動力基準レベルである状態である。
そして、制御指令信号生成手段は、操作指令手段から操作指令信号が入力された場合、機器駆動力検出手段により検出された機器駆動力と機器駆動力基準レベルとの差異に基づき、その入力された操作指令信号に対応した基準指令信号をそのまま制御指令信号としてエンジンへ出力した場合にその基準指令信号に対応した目標加速力を含む所定範囲内の加速力が得られるか否か判断し、得られない場合は、その所定範囲内の加速力を得ることが可能な基準指令信号を選択して、その選択した基準指令信号を制御指令信号としてエンジンへ出力する。
【0017】
即ち、仮にエンジンからの出力が一定だとすると、機器駆動力が大きいほど、その分、エンジンからの出力のうち走行用駆動源として用いられる出力(走行用駆動力)は小さくなり、その分、車両(気動車)の加速力も低下してしまう。
【0018】
そこで本発明では、機器駆動力が変動しても走行用駆動力は変動しないよう、機器駆動力の変動に応じてエンジンからの基準エンジン出力も変動させる。つまり、従来のように操作指令信号に対応した基準指令信号をそのまま制御指令信号としてエンジンへ出力するのではなく、その基準指令信号で本来得られるべき所定範囲内の加速力が機器駆動力によって得られない場合は、操作指令信号に対応した基準指令信号ではなく、その所定範囲内の加速力を得ることが可能な他の基準指令信号を、制御指令信号としてエンジンへ出力する。
【0019】
このように、走行用駆動力と機器駆動力を総合したエンジン出力制御を行うことで、車載機器の動作状態の変動(機器駆動力の変動)にかかわらず、走行用駆動力の変動を抑制して安定した車両加速力を得ることが可能となる。
【0020】
尚、気動車の加速力に影響する加速力関連状態とは、エンジンの出力が一定であるにもかかわらず加速力の変動を生じさせるような要因を意味する。エンジン出力が一定であっても機器駆動力が変動するとそれに伴って走行用駆動力も変動し、加速力の変動を引き起こすため、機器駆動力も加速力関連状態の1つと言える。
【0021】
検出対象機器で実際に用いられている機器駆動力を具体的にどのようにして、どのような物理量として検出するかは種々考えられ、例えば消費電力として検出することができる。
【0022】
即ち、請求項2に記載の発明は、請求項1に記載の気動車用エンジン制御装置であって、気動車は、機器駆動力を電気エネルギーに変換する発電手段を備え、検出対象機器は、発電手段から供給される電力により駆動する電気負荷として構成されている。そして、機器駆動力検出手段は、機器駆動力として、検出対象機器で消費されている電力を検出する。
【0023】
電気負荷としての検出対象機器の消費電力が増えるほど発電手段による発電電力も増加し、発電電力が増えるほど、エンジン出力のうち検出対象機器の駆動源として用いられる分(詳しくは発電手段により電気エネルギーに変換される分)も増加する。そのため、検出対象機器の消費電力を検出することで、補機駆動力を間接的に検出することができるのである。
【0024】
このように、電気負荷である検出対象機器の消費電力を機器駆動力として検出することで、機器駆動力の検出を容易に行うことができる。
制御指令信号生成手段が機器駆動力に基づいて具体的にどのように制御指令信号としての基準指令信号を選択するかについても種々考えられるが、例えば請求項3に記載のように、機器駆動力に基づいて、操作指令信号に対応した基準エンジン出力を何段階増減させればよいかを判断して、その段階数だけ増減させた基準エンジン出力を発生させるための基準指令信号を制御指令信号として出力するようにすることができる。
【0025】
即ち、請求項3に記載の発明は、請求項1又は請求項2に記載の気動車用エンジン制御装置であって、第1増減情報生成手段を備えている。この第1増減情報生成手段は、機器駆動力以外の加速力関連状態はいずれも基準状態であるものとの仮定のもと、機器駆動力検出手段により検出された機器駆動力と機器駆動力基準レベルとの差異に基づいて、操作指令手段からの操作指令信号に対応した基準指令信号をそのまま制御指令信号として出力した場合にその基準指令信号に対応した所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま制御指令信号として出力してもよい旨を、得られないならばその所定範囲内の加速力を得るためにはその基準指令信号に対応した基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第1増減情報を出力するものである。
【0026】
そして、制御指令信号生成手段は、操作指令手段からの操作指令信号に対応した基準指令信号を、第1増減情報生成手段からの第1増減情報に従って、そのまま、若しくは上記段階数だけ増減した後の基準エンジン出力に対応した基準指令信号を、制御指令信号としてエンジンへ出力する。
【0027】
つまり、操作指令信号に対応した基準指令信号を基本としつつも、例えば機器駆動力が機器駆動力基準レベルよりも大きくてその基準指令信号に対応した基準エンジン出力では所定範囲内の加速力より小さい加速力しか得られない場合、その基準エンジン出力を何段階増加させれば所定範囲内の加速力が得られるかを判断し、その判断した段階だけ増加した基準エンジン出力に対応した基準指令信号を制御信号として選択・出力する。
【0028】
逆に、例えば機器駆動力が機器駆動力基準レベルよりも小さくてその基準指令信号に対応した基準エンジン出力では所定範囲内の加速力より大きい加速力が生じてしまう場合、その基準エンジン出力を何段階減少させれば所定範囲内の加速力が得られるかを判断し、その判断した段階だけ減少した基準エンジン出力に対応した基準指令信号を制御信号として選択・出力する。
【0029】
そのため、機器駆動力に応じた適切な制御指令信号の選択・出力を容易且つ確実に行うことができる。
ところで、気動車の加速力は、車載機器の動作状態の影響の他にも、車両重量の影響も受ける。具体的には、同じ走行用駆動力に対し、車両重量が増えれば増えるほど、車両の加速力は低くなってしまう。つまり、車両重量も、加速力の変動を生じさせる一要因であり、気動車の加速力に影響する加速力関連状態の1つである。
【0030】
そこで、上述した請求項1〜請求項3の何れか1項に記載の気動車用エンジン制御装置においては、更に、例えば請求項4に記載のように、車両重量も考慮して制御指令信号を選択・出力するようにするとよい。即ち、気動車の重量を直接又は間接的に検出する重量検出手段を備え、加速力関連状態として少なくとも重量が含まれるようにする。重量に対する基準状態とは、重量が所定の重量基準レベルである状態である。そして、制御指令信号生成手段は、操作指令手段から操作指令信号が入力された場合、機器駆動力検出手段により検出された機器駆動力と機器駆動力基準レベルとの差異、及び重量検出手段により検出された重量と重量基準レベルとの差異に基づき、その操作指令信号に対応した基準指令信号をそのまま制御指令信号としてエンジンへ出力した場合にその基準指令信号に対応した所定範囲内の加速力が得られるか否か判断し、得られない場合は、その所定範囲内の加速力を得ることが可能な基準指令信号を選択して、その選択した基準指令信号を制御指令信号としてエンジンへ出力する。
【0031】
このように、機器駆動力に加えてさらに車両重量も考慮して制御指令信号を選択することで、車両重量にかかわらず安定した車両加速力を得ることも可能となる。
制御指令信号生成手段が重量に基づいて具体的にどのように制御指令信号としての基準指令信号を選択するかについても種々考えられるが、例えば請求項5に記載のように、重量に基づいて、操作指令信号に対応した基準エンジン出力を何段階増減させればよいかを判断し、その判断結果と機器駆動力に基づく上記判断結果とを総合した段階数だけ増減させた基準エンジン出力を発生させるための基準指令信号を、制御指令信号として出力するようにすることができる。
【0032】
即ち、請求項5に記載の発明は、請求項3に記載の気動車用エンジン制御装置であって、気動車の重量を直接又は間接的に検出する重量検出手段を備え、加速力関連状態として少なくとも重量が含まれるようにする。重量に対する基準状態とは、重量が所定の重量基準レベルである状態である。
【0033】
また、第2増減情報生成手段を備えている。この第2増減情報生成手段は、重量以外の加速力関連状態はいずれも基準状態であるものとの仮定のもと、重量検出手段により検出された重量と重量基準レベルとの差異に基づいて、操作指令手段からの操作指令信号に対応した基準指令信号をそのまま制御指令信号として出力した場合にその基準指令信号に対応した所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま制御指令信号として出力してもよい旨を、得られないならばその所定範囲内の加速力を得るためにはその基準指令信号に対応した基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第2増減情報を出力するものである。
【0034】
そして、制御指令信号生成手段は、操作指令手段からの操作指令信号に対応した基準指令信号を、第1増減情報生成手段からの第1増減情報及び第2増減情報生成手段からの第2増減情報に従って、そのまま、若しくは各増減後の基準エンジン出力に対応した基準指令信号を、制御指令信号としてエンジンへ出力する。
【0035】
つまり、操作指令信号に対応した基準指令信号を基本としつつも、機器駆動力及び車両重量の双方に応じて、その機器駆動力及び車両重量においても操作指令信号に対応した所望の加速力が得られるよう、その加速力発生に必要な基準指令信号を選択する。
【0036】
例えば、機器駆動力が機器駆動力基準レベルよりも大きいことにより第1増減情報として基準エンジン出力を所定段階(例えば2段階)増加させるべき旨が出力され、且つ、車両重量が重量基準レベルよりも小さいことにより第2増減情報として基準エンジン出力を所定段階(例えば1段階)減少させるべき旨が出力された場合は、両者を総合した所定段階数だけ増減(上記例では2段階増加と1段階減少を総合して1段階増加)した基準エンジン出力が出力されるようにする。即ち、操作指令信号に対応した基準指令信号に代えて、その基準指令信号より1段階上の基準指令信号を制御指令信号として出力するのであり、これにより、結果として得られる車両の加速力は、操作指令信号に対応した基準指令信号に対する所定範囲内の加速力となる。
【0037】
このように、操作指令信号に対応した基準指令信号に対し、第1増減情報及び第2増減情報に基づいて、必要に応じて(即ち所定範囲内の加速力が得られるように)その基準指令信号とは異なる他の基準指令信号を選択することで、機器駆動力及び車両重量の双方に応じた適切な値の制御指令信号の選択・出力を容易且つ確実に行うことができる。
【図面の簡単な説明】
【0038】
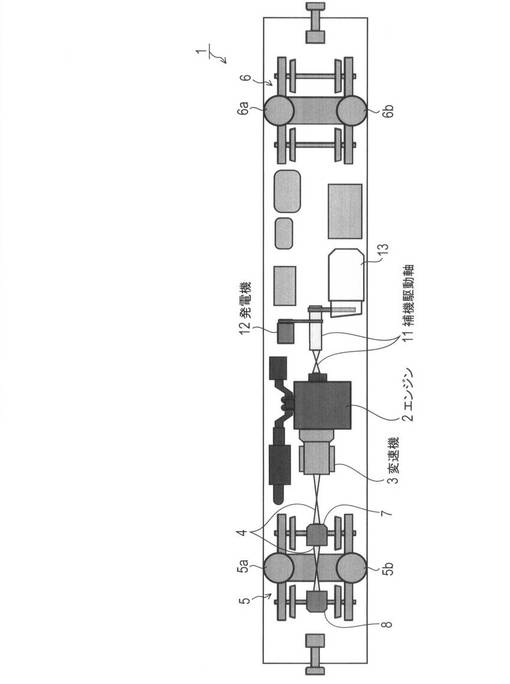
【図1】実施形態の気動車の床下機器配置図である。
【図2】実施形態のエンジン制御システムの概略構成を表す構成図である。
【図3】ノッチ毎の基準エンジン出力曲線の一例を表す説明図である。
【図4】補機負荷に応じてエンジンに入力される制御ノッチ信号が変化することを説明するための説明図である。
【図5】実施形態のエンジン制御システムの動作例を表す説明図である。
【発明を実施するための形態】
【0039】
以下に、本発明の好適な実施形態を図面に基づいて説明する。
図1に示すように、本発明が適用された実施形態の気動車1は、その床下に、走行用駆動源であるエンジン2が配置され、床下における車両両端側にはそれぞれ、台車5,6が配置されている。
【0040】
エンジン2は、ディーゼルエンジンである。このエンジン2は、異なる所定数(複数段階)の制御ノッチ信号(本発明の制御指令信号に相当)の何れかが入力されて動作するものであり、後述するように、入力される制御ノッチ信号毎に出力特性(基準エンジン出力曲線)が予め定められている。
【0041】
また、気動車1の床下には、エンジン2の出力を一方の台車5の車輪に伝達するための、変速機3、推進軸4、終減速機7,8などからなる伝達機構が配置されている。つまり、エンジン2の出力は、変速機3、推進軸4、各終減速機7,8によって順次伝達され、最終的に車軸・車輪に伝達されて、これにより気動車1が走行することとなる。これら伝達機構の構成はよく知られているため、ここではその説明は省略する。尚、変速機3は、トルクコンバータを備えた周知の液体変速機である。
【0042】
また、エンジン2の出力は、上記のように走行用駆動源として用いられるだけでなく、各種補機の駆動源としても用いられる。即ち、エンジン2の出力は、補機駆動軸11を介して、発電機12やラジエター13などの各種補機にも伝達され、これによりこれら各種補機が駆動されることとなる。これら各種補機の中には、例えばコンプレッサ16や空調装置17など(後述の図2参照)、エンジン2の出力によって直接駆動されるものではないものの発電機12の発電電力によって動作する各種の電気負荷も含まれている。
【0043】
また、各台車5,6にはそれぞれ、いわゆるエアーサスペンションとして機能する周知の空気バネが取り付けられている。即ち、一方の台車5にはその中央部における車両幅方向の両端部にそれぞれ空気バネ5a,5bが取り付けられ、他方の台車6にもその中央部における車両幅方向の両端部にそれぞれ空気バネ6a,6bが取り付けられている。
【0044】
そして、一方の台車5の各空気バネ5a,5bには、それぞれ応荷重センサ30(図2参照)が取り付けられている。この応荷重センサ30は、気動車1の重量(車両重量)を検出するためのものであり、直接的には対応する空気バネの内圧を検出し、その検出結果に応じた応荷重信号を出力する。
【0045】
次に、エンジン2の具体的制御について、図2を用いて説明する。図2は、気動車1に構築されてエンジン制御システムの概略構成を示すものである。
気動車1の床下には、図1では図示を省略したものの、エンジン2及び変速機3を制御するための変速機制御装置が備えられており、この変速機制御装置からの制御信号によってエンジン2及び変速機3が制御される。そして、この変速機制御装置の中に、図2に示すような、エンジン2の制御を担うエンジン制御部21が備えられている。
【0046】
エンジン制御部21は、基準ノッチ信号Pmを生成する基準ノッチ信号生成部22と、補機負荷補正値αを演算する補機負荷補正値演算部24と、基準ノッチ信号Pmを補機負荷補正値αで補正演算して第1補正ノッチ信号を生成する第1補正演算部23と、車両重量補正値βを演算する車両重量補正値演算部26と、第1補正ノッチ信号を車両重量補正値βで補正演算して第2補正ノッチ信号を生成する第2補正演算部25とを備えている。そして、第2補正演算部25で生成された第2補正ノッチ信号が、制御ノッチ信号として、エンジン2に入力される。
【0047】
基準ノッチ信号生成部22は、図示しない運転台に設けられたマスコン20からのノッチ指令信号(本発明の操作指令信号に相当)に基づき、ノッチ毎に予め設定された基準ノッチ信号Pm(本発明の基準指令信号に相当)を生成・出力する。
【0048】
本実施形態では、マスコン20において例えば1ノッチ〜nノッチの何れかに選択的に切り替え設定でき、マスコン20から各ノッチに応じたノッチ指令信号が出力される。そして、基準ノッチ信号生成部22においては、ノッチ毎の各ノッチ指令信号に対応した基準ノッチ信号Pm(=P1〜Pn)のうち、入力されたノッチ指令信号に対応した基準ノッチ信号Pm、即ちマスコン20において現在設定されているノッチに対応した基準ノッチ信号Pmが生成される。この基準ノッチ信号Pmは、これをそのまま制御ノッチ信号としてエンジン2に出力すればノッチに応じた所定のエンジン出力(基準エンジン出力)が得られるものである。
【0049】
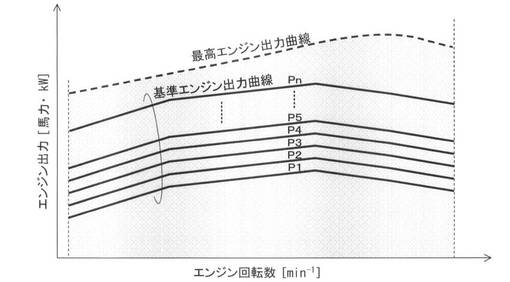
図3に、ノッチ毎(即ち基準ノッチ信号Pm毎)の、エンジン回転数に対するエンジン出力(図3では馬力で表示)の変化を示す。本実施形態のエンジン2は、図3に示す最高エンジン出力曲線の範囲内において、基準ノッチ信号毎に段階的に異なる基準エンジン出力曲線が設定されている。
【0050】
つまり、例えばマスコン20が5ノッチに操作・選択されてその旨を示すノッチ指令信号がエンジン制御部21に入力された場合は、基準ノッチ信号生成部22にて、5ノッチに対応した基準ノッチ信号P5が生成される。そして、この5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号としてエンジン2に入力したならば、エンジン2は、図3に示す各曲線のうちP5に対応した基準エンジン出力曲線に沿って動作することとなる。
【0051】
また、本実施形態では、気動車1に発生させるべき目標加速度がノッチ毎に段階的に設定されている。即ち、1ノッチからnノッチまで目標加速度が段階的に増加するように、ノッチ毎に目標加速度が設定されている。そして、各ノッチに対応した各基準エンジン出力曲線、即ち各基準ノッチ信号Pmに対応した各基準エンジン出力曲線は、それぞれ、ある一定条件の下でその基準エンジン出力曲線に沿ってエンジン2を動作させたならばその基準エンジン出力曲線に対応した基準ノッチ信号Pmに対して設定されている目標加速度が得られるように決められている。
【0052】
ここでいう一定条件とは、本発明の基準状態に相当するものであって、本実施形態では、少なくとも、エンジン出力のうち補機駆動用に用いられる(即ち補機駆動軸11側に出力される)分である補機駆動力、及び車両重量を含む、気動車1の加速力に影響する各種の車両状態に対して予め定められている。
【0053】
具体的には、補機駆動力及び車両重量については、発電機12の発電電力によって動作する各種電気負荷の稼働率が全て100%の場合(即ち各電気負荷が全て最大定格電力にて動作している場合)の補機駆動力、且つ、乗客の乗車率が100%のとき(即ち予め決められた乗車定員と同人数の乗客が乗車しているとき)に想定される車両重量を、上記一定条件としている。
【0054】
つまり、各電気負荷の稼働率が全て100%であって且つ乗車率100%のときにマスコン20にて何れかのノッチが選択された場合に、そのノッチに対応した基準ノッチ信号Pmをそのまま制御ノッチ信号としてエンジン2に出力することによりエンジン2をその基準ノッチ信号Pmに対応した基準エンジン出力曲線に沿って動作させたならば、気動車1はそのノッチに対応した目標加速力を得ることができる。
【0055】
尚、補機駆動力及び車両重量は、いずれも、これらが変動すると気動車1の加速力に変動を生じさせるおそれのあるものであり、本発明の加速力関連状態に相当するものである。また、上記一定条件としての、各電気負荷の稼働率が全て100%であるときの補機駆動力は本発明の機器駆動力基準レベルに相当し、乗車率100%であるときの車両重量は本発明の重量基準レベルに相当する。
【0056】
本実施形態では、原則的には、マスコン20にて操作されているノッチに対応した基準ノッチ信号Pmをそのまま制御ノッチ信号としてエンジン2へ出力することを、動作の基本としている。
【0057】
しかし、ノッチに対応した目標加速力を得るべく、そのノッチに対応した基準ノッチ信号Pmをそのまま制御ノッチ信号としてエンジン2に入力するようにすると、エンジン2の出力(エンジン出力)はそのノッチに対応して予め決められた基準エンジン出力曲線に従って制御されることになるため、補機の動作状態が変動すると補機駆動力が変動し、これによりエンジン出力のうち走行用に用いられる(即ち変速機3側に出力される)分である走行用駆動力も変動し、実際に得られる加速力も変動してしまう。
【0058】
また、補機の動作状態だけでなく、車両重量が変動することによっても、実際に得られる加速力は変動してしまう。
そのため、補機の動作状態や車両重量によっては、ノッチに対応した目標加速力とは異なる加速力が生じてしまい、安定した運転の取り扱いが困難となってしまう。具体的には、本例の場合、各電気負荷の稼働率が全て100%であって且つ乗車率100%のときを基準に目標加速力、基準エンジン出力曲線が設定されているため、実際の電気負荷の稼働率が低いほど、また実際の乗車率が低いほど、ノッチに対応した目標加速力よりも大きな加速力が発生してしまうことになる。
【0059】
そこで本実施形態では、補機(本例では特に電気負荷)の動作状態の変化によって補機駆動力が変動しても加速力の変動を抑制できるよう、また、車両重量が変動しても加速力の変動を抑制できるよう、補機駆動力及び車両重量に応じて基準ノッチ信号Pmを補正し、補正後の基準ノッチ信号Pmを制御ノッチ信号としてエンジン2へ出力するようにしている。
【0060】
そして、その補正を行うために、エンジン制御部21に、補機負荷補正値演算部24、第1補正演算部23、車両重量補正値演算部26、及び第2補正演算部25が備えられている。
【0061】
気動車1に備えられた各種補機には、既述の通り、エンジン2から補機側への出力(補機駆動力)を受けて直接駆動される発電機12やラジエター13等のほか、発電機12の発電電力によって動作する、コンプレッサ16や空調装置17等の各種電気負荷がある。
【0062】
本実施形態のエンジン制御部21は、これら各種電気負荷の消費電力を検出することによって、補機駆動力のうちこれら各種電気負荷に用いられる分を間接的に検出・取得するよう構成されている。
【0063】
即ち、発電機12の発電電力は電源装置15に入力され、この電源装置15において各電気負荷の動作に必要な電力に変換されて各電気負荷へ供給される。電源装置15は、各電気負荷へ供給する電力の総量(以下「補機負荷」ともいう)を検出し、その検出結果である負荷電力信号をエンジン制御部21へ出力するよう構成されている。
【0064】
この負荷電力信号は、補機駆動力のうち各種電気負荷の駆動に用いられる分を間接的に示すものであり、エンジン制御部21は、この負荷電力信号を取得することで、補機駆動力のうち少なくとも各電気負荷に用いられる分を間接的に検出することができる。
【0065】
尚、電源装置15自体も電気負荷の一種であるため、負荷電力信号として、電源装置15で消費されている電力も含めたものを出力するようにしてもよい。また、補機が全て電気負荷であれば、補機駆動力全てを間接的に検出することができる。
【0066】
電源装置15からの負荷電力信号は、エンジン制御部21において、補機負荷補正値演算部24に入力される。補機負荷補正値演算部24は、入力された負荷電力信号に基づき、補機負荷補正値α(本発明の第1増減情報に相当)を演算する。
【0067】
具体的には、補機駆動力以外の他の各種車両状態は上記一定条件であるとの仮定のもと、入力された負荷電力信号が示す補機負荷と、予め設定された補機負荷基準レベル(本例では各電気負荷の稼働率が100%のときの補機負荷)との差異に基づいて、マスコン20からのノッチ指令信号に対応した基準ノッチ信号Pmをそのまま制御ノッチ信号として出力した場合にその基準ノッチ信号Pmに対応した目標加速力が得られるか否か判断する。
【0068】
そして、得られるならばその基準ノッチ信号Pmをそのまま制御ノッチ信号として出力してもよい旨を、得られないならばその目標加速力を得るためにはその基準ノッチ信号Pmに対応した基準エンジン出力曲線から何段階増減させる必要があるかを、それぞれ示す補機負荷補正値αを出力する。
【0069】
尚、目標加速力と全く同じ加速力が得られるかといった厳密な判断をしてもよいが、ある程度幅を持たせて判断してもよく、本例では、ノッチ毎の各目標加速力について、それぞれ、その目標加速力を含む所定の加速力範囲を目標加速力範囲として、その目標加速力範囲内の加速力が得られるか否か判断するようにしている。この目標加速力範囲は、目標加速力を含む限り適宜決めることができるが、本例では、実際に得られる加速力が目標加速力を下回らないよう、目標加速力を含み且つその目標加速力以上の所定の範囲が、目標加速力範囲として設定されている。
【0070】
そのため、例えばマスコン20が5ノッチに操作・選択されている場合であって、電源装置15から入力されている負荷電力信号が示す補機負荷が補機負荷基準レベルと同等の場合は、少なくとも補機負荷に関しては5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号としてエンジン2へ出力することで5ノッチに対応した目標加速力範囲内の加速力が得られると判断して、基準ノッチ信号P5をそのまま出力すべき旨の補記負荷補正値αを生成、出力する。
【0071】
一方、例えばマスコン20が5ノッチに操作・選択されているものの、電源装置15から入力されている負荷電力信号が示す補機負荷が補機負荷基準レベルより小さく、5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号したのでは5ノッチに対応した目標加速力範囲よりも大きい加速力が発生してしまうと判断した場合は、5ノッチに対応した基準エンジン出力曲線よりも何段階下の基準エンジン出力曲線を用いれば5ノッチに対応した目標加速力範囲内の加速力を得られるか判断する。
【0072】
この段階数は、現在の補機負荷と補機負荷基準レベルとの差異に基づき、例えば閾値を1つ又は段階的に複数用意して、上記差異と各閾値との比較結果に応じて決めることができる。例えば閾値を1つ設定し、上記差異がその閾値以下ならば1段階下げるようにし、上位差異がその閾値を超えていたら2段階下げるようにする、といった方法が考えられる。勿論これはあくまでも一例に過ぎない。そして、その判断した段階数を示す補機負荷補正値αを生成、出力する。
【0073】
第1補正演算部23は、基準ノッチ信号生成部22からの基準ノッチ信号Pmを、補機負荷補正値演算部24からの補機負荷補正値αに従って、そのまま、若しくは変更して、第1補正ノッチ信号を算出し出力する。
【0074】
即ち、例えばマスコン20が5ノッチに操作・選択されている場合に、補機負荷補正値αが、例えば、基準ノッチ信号生成部22からの基準ノッチ信号P5をそのまま出力してもよい(増減は不要である)旨を示すものであれば、基準ノッチ信号P5をそのまま第1補正ノッチ信号P5として出力する。また例えば、補機負荷補正値αが、基準ノッチ信号生成部22からの基準ノッチ信号P5を1段階下げるべき旨を示すものであれば、基準ノッチ信号P5からその段階数だけ下の基準ノッチ信号P4を第1補正ノッチ信号P4として出力する。
【0075】
車両重量補正値演算部26は、各台車5、6にそれぞれ取り付けられた応荷重センサ30からの応荷重信号に基づき、車両重量補正値β(本発明の第2増減情報に相当)を演算する。
【0076】
具体的には、車両重量以外の他の各種車両状態は上記一定条件であるとの仮定のもと、入力された応荷重信号が示す車両重量と、予め設定された重量基準レベル(本例では乗車率100%のときの車両重量)との差異に基づいて、マスコン20からのノッチ指令信号に対応した基準ノッチ信号Pmをそのまま制御ノッチ信号として出力した場合にその基準ノッチ信号Pmに対応した目標加速力が得られるか否か判断する。
【0077】
そして、得られるならばその基準ノッチ信号Pmをそのまま制御ノッチ信号として出力してもよい旨を、得られないならばその目標加速力を得るためにはその基準ノッチ信号Pmに対応した基準エンジン出力曲線から何段階増減させる必要があるかを、それぞれ示す車両重量補正値βを出力する。
【0078】
尚、この場合も、目標加速力と全く同じ加速力が得られるかといった厳密な判断をしてもよいが、本例では、補機負荷補正値αの演算と同様、ノッチ毎に設定された目標加速力範囲内の加速力が得られるか否か判断するようにしている。
【0079】
そのため、例えばマスコン20が5ノッチに操作・選択されている場合であって、乗車率が100%の場合(即ち車両重量が重量基準レベルと同等の場合)は、少なくとも車両重量に関しては5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号としてエンジン2へ出力することで5ノッチに対応した目標加速力範囲内の加速力が得られると判断して、第1補正演算部23からの第1補正ノッチ信号をそのまま出力すべき旨の車両重量補正値βを生成、出力する。
【0080】
一方、例えばマスコン20が5ノッチに操作・選択されているものの、乗車率が例えば50%程度であって、5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号したのでは5ノッチに対応した目標加速力範囲よりも大きい加速力が発生してしまうと判断した場合は、5ノッチに対応した基準エンジン出力曲線よりも何段階下の基準エンジン出力曲線を用いれば5ノッチに対応した目標加速力範囲内の加速力を得られるか判断する。
【0081】
この段階数は、現在の車両重量と重量基準レベルとの差異に基づき、上述した補機負荷補正値演算部24における段階数判断と同様、例えば閾値を1つ又は段階的に複数用意して、上記差異と各閾値との比較結果に応じて決めることができる。そして、その判断した段階数を示す車両重量補正値βを生成、出力する。
【0082】
第2補正演算部25は、第1補正演算部23からの第1補正ノッチ信号を、車両重量補正値演算部26からの車両重量補正値βに従って、そのまま、若しくは変更して、第2補正ノッチ信号を算出し出力する。そして、この第2補正演算部25からの第2補正ノッチ信号が、制御ノッチ信号としてエンジン2へ入力される。
【0083】
即ち、例えばマスコン20が5ノッチに操作・選択されている場合であって第1補正演算部23からはその5ノッチに対応した基準ノッチ信号P5がそのまま第1補正ノッチ信号として出力されている場合に、車両重量補正値βが、例えば増減は不要である旨を示すものであれば、その第1補正ノッチ信号としての基準ノッチ信号P5をそのまま第2補正ノッチ信号として出力する。そのため、この場合は、実際のマスコン20のノッチ指令に対応した基準ノッチP5がそのまま制御ノッチ信号としてエンジン2へ出力されることとなる。
【0084】
また例えば、車両重量補正値βが、入力された基準ノッチ信号P5を1段階下げるべき旨を示すものであれば、基準ノッチ信号P5からその段階数だけ下の基準ノッチ信号P4を第2補正ノッチ信号として出力する。そのため、この場合は、実際のマスコン20からのノッチ指令とは異なる基準ノッチP4が、制御ノッチ信号としてエンジン2へ出力されることとなる。しかし、得られる車両加速度は、実際のマスコン20のノッチ指令である5ノッチに対応した目標加速力範囲内のものとなる。
【0085】
また例えば、マスコン20が5ノッチに操作・選択されていて基準ノッチ信号生成部22からはその5ノッチに対応した基準ノッチ信号P5が出力されているものの、補機負荷が少ないことによって、第1補正演算部にて例えば2段階下の基準ノッチ信号P3が第1補正ノッチ信号として出力されている場合に、車両重量補正値βが、基準ノッチ信号を2段階下げるべき旨を示すものであれば、入力された第1補正ノッチ信号である基準ノッチ信号P3よりもさらに2段階下の基準ノッチ信号P1を、第2補正ノッチ信号として出力する。そのため、この場合は、実際のマスコン20からのノッチ指令とは異なる基準ノッチP1が、制御ノッチ信号としてエンジン2へ出力されることとなる。しかしこの場合も、得られる車両加速度は、実際のマスコン20のノッチ指令である5ノッチに対応した目標加速力範囲内のものとなる。
【0086】
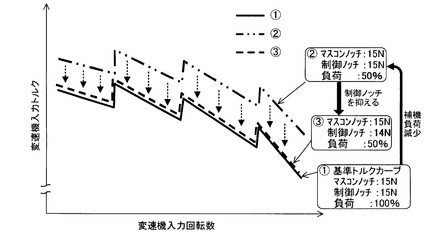
図4に、補機負荷の変動によって制御ノッチ信号が補正されること、及びその補正の過程での変速機3に入力されるトルク(走行用駆動力)の変動の具体例を示す。図4の例は、電気負荷全体の稼働率が100%から50%に変化した場合の例を示すものである。尚、補機負荷以外の各車両状態は全て上記一定条件であることが前提となっている。
【0087】
図4に示すように、マスコン20が15ノッチに設定されていて電気負荷全体の稼働率が100%の場合は、エンジン2にはその15ノッチに対応した基準ノッチ信号P15がそのまま制御ノッチ信号として入力され、変速機3に入力されるトルクは、エンジン回転数に応じて図中実線で示すようなカーブを描く。
【0088】
その後、電気負荷全体の稼働率が50%に減少すると、エンジン2からの出力のうち補機駆動のための補機駆動力が減少し、その分が走行用駆動力に上乗せされることになるため、変速機3に入力されるトルクは、図中2点鎖線で示すようなカーブを描くことになる。そのため、このままでは、15ノッチに対応した目標加速力範囲よりも大きい加速力が発生してしまう。
【0089】
これに対し、本実施形態では、補機負荷補正値演算部24が、負荷電力信号に基づいて、加速力を15ノッチに対応した目標加速力範囲内に抑えるためには基準ノッチ信号を2段階下げる必要があると判断し、その旨を示す補機負荷補正値αを出力する。そして、その補機負荷補正値αに基づき、第1補正演算部23が、入力された基準ノッチ信号P15より2段階下の基準ノッチ信号P13を第1補正ノッチ信号として出力する。
【0090】
これにより、他の車両状態は一定条件であることから、その第1補正ノッチ信号である基準ノッチ信号P13が制御ノッチ信号としてエンジン2へ出力される。つまり、マスコン20は15ノッチであるもののエンジン2には13ノッチに対応した基準ノッチ信号P13が入力されるのである。
【0091】
そしてこれにより、変速機3に入力されるトルクは、図中破線で示すようなカーブを描く。このカーブは、稼働率100%のときのカーブ(図中実線)にごく近いものである。そのため、マスコン20のノッチは15ノッチのままでありながら、電気負荷全体の稼働率が100%から50%に低減しても、15ノッチに対応した所望の目標加速力範囲内の加速力を得ることができる。
【0092】
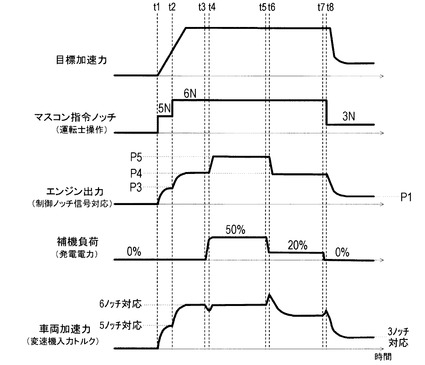
次に、上記のように構成された本実施形態のエンジン制御部21の動作例について、図5を用いて説明する。尚、図5の動作例は、説明の簡略化のために、補機負荷以外の他の各車両状態はいずれも上記一定条件である(つまり乗車率は100%である)ことを前提としている。
【0093】
図5に示すように、時刻t1にて運転士によりマスコン20が5ノッチに操作されると、5ノッチに対応した目標加速力範囲内の加速力が得られるよう、エンジン2へ制御ノッチ信号が出力される。このとき、補機負荷は0(詳しくは、各電気負荷の稼働率が0%であって発電電力が0)であることから、実際のノッチ(5ノッチ)よりも2段階低い3ノッチに対応した基準ノッチ信号P3がエンジン2へ出力される。但し、これにより得られる車両の加速度は、マスコン20の5ノッチに対応した目標加速力範囲内の加速力となる。
【0094】
尚、仮にマスコンノッチに対応した基準ノッチ信号P5がそのままエンジン2へ出力された場合、補機負荷が0であるが故に、車両の加速度は5ノッチに対応した目標加速力範囲より大きなものとなってしまうが、本実施形態ではそのような加速力増大を抑制することができる。
【0095】
その後、時刻t2でマスコン20が6ノッチに操作されると、このときも時刻t1のときと同様に補機負荷は0であることから、実際のノッチ(6ノッチ)よりも2段階低い4ノッチに対応した基準ノッチ信号P4がエンジン2へ出力される。但し、これにより得られる車両の加速度は、マスコン20の6ノッチに対応した目標加速力範囲内の加速力となる。
【0096】
尚、このときも、仮にマスコンノッチに対応した基準ノッチ信号P6がそのままエンジン2へ出力された場合、補機負荷が0であるが故に、車両の加速度は6ノッチに対応した目標加速力範囲より大きなものとなってしまうが、本実施形態ではそのような加速力増大を抑制することができる。
【0097】
そして、時刻t3にて、例えばいくつかの電気負荷が動作を開始したことによって補機負荷が50%(詳しくは電気負荷全体の稼働率が50%)に増加すると、その分、走行用駆動力が減少して加速力が減少してしまうが、本実施形態では、その補機負荷増加を検知して、第1補正演算部23により基準ノッチ信号がP4から1段階上のP5に補正される。そして、その補正後の基準ノッチ信号P5が制御ノッチ信号としてエンジン2に入力される(時刻t4)。そのため、時刻t3〜t4の間で制御応答遅れによる若干の変動はあるものの、車両の加速度は、マスコン20の6ノッチに対応した目標加速力範囲内が維持される。
【0098】
つまり、マスコン20のノッチは不変ながらも、エンジン制御部21内の補正によって補機負荷に応じた適切な基準ノッチ信号を出力することで、補機負荷の変動分が補われ、マスコンノッチに対応した目標加速力範囲内の加速力を維持することができるのである。
【0099】
その後、時刻t5にて、稼働中の電気負荷のいくつかが停止又は出力低下したことによって補機負荷が20%(詳しくは電気負荷全体の稼働率が20%)に減少すると、その分、走行用駆動力が増加して加速力が増加してしまうが、本実施形態では、その補機負荷減少を検知して、第1補正演算部23により基準ノッチ信号がP5から1段階下のP4に補正される。そして、その補正後の基準ノッチ信号P4が制御ノッチ信号としてエンジン2に入力される(時刻t6)。そのため、時刻t5〜t6の間で制御応答遅れによる若干の変動はあるものの、車両の加速度は、マスコン20の6ノッチに対応した目標加速力範囲内が維持される。
【0100】
なお、この時刻t6以降(〜時刻t7)の制御ノッチ信号は、時刻t2〜t3の間と同じく、4ノッチに対応した基準ノッチ信号P4であるが、時刻t2〜t3の間は補機負荷が0%であったのに対し、時刻t6〜t7では補機負荷が20%と若干の補機が動作している。そのため、時刻t6〜t7の間の車両の加速力は、時刻t2〜t3の間の加速力よりも若干低くなっている。但し、いずれもマスコン20の6ノッチに対応した目標加速力範囲内にある。
【0101】
その後、時刻t7にて、補機負荷が再び0%になり、これにより加速力が上昇し始めるが、本例ではここで、補機負荷変動に基づく基準ノッチ信号の補正を行う前に運転士がマスコン20のノッチを6ノッチから3ノッチに切り替えている。そのため、エンジン2へ出力される制御ノッチ指令は、その切り替え後のマスコン20の3ノッチに対し、補機負荷0%を考慮して2段階下に補正された基準ノッチ信号P1となる。これにより、車両の加速度は、マスコン20の3ノッチに対応した目標加速力範囲内に維持される。
【0102】
以上説明したように、本実施形態のエンジン制御部21は、単にマスコン20からのノッチ指令信号に対応した基準ノッチ信号Pmをそのまま制御ノッチ信号として出力するのではなく、補機負荷及び車両重量に応じて基準ノッチ信号Pmを補正し、その補正後の基準ノッチ信号を制御ノッチ信号として出力する。
【0103】
このように、走行用駆動力と補機駆動力を総合したエンジン出力制御を行うことで、補機(但し本実施形態では電気負荷のみ)の動作状態の変動(補機負荷の変動)にかかわらず、走行用駆動力の変動を抑え、これにより車両の加速力の変動を抑えて安定した加速力を得ることが可能となる。そして、加速力の変動を抑制できることから、安定した運転取扱いが実現できる。
【0104】
また、本実施形態では、各電気負荷の消費電力を補機負荷として検出することで、これら電気負荷の駆動に用いられる補機駆動力を間接的に検出するようにしている。そのため、補機負荷の検出(延いては補機駆動力の検出)を容易に行うことができる。
【0105】
また、本実施形態では、補機負荷に応じた制御ノッチ信号の生成を、具体的には、基準ノッチ信号Pmを、補機負荷に応じて演算された補機負荷補正値αが示す段階数だけ増減させることにより行っている。そのため、補機駆動力に応じた適切な制御ノッチ信号の生成を容易且つ確実に行うことができる。
【0106】
また、補機駆動力に加えてさらに車両重量も考慮して制御ノッチ信号を生成することで、車両重量にかかわらず安定した加速力を得ることも可能となる。
[変形例]
以上、本発明の実施の形態について説明したが、本発明の実施の形態は、上記実施形態に何ら限定されるものではなく、本発明の技術的範囲に属する限り種々の形態を採り得ることはいうまでもない。
【0107】
例えば、上記実施形態では、マスコン20のノッチに対応した基準ノッチ信号Pmに対し、各補正値α、βに基づいて補正(所定段階増減)することにより制御ノッチ信号を得るようにしたが、これはあくまでも一例であり、補機負荷及び車両重量によらずマスコン20のノッチに対応した所望の加速力を得ることができる限り、基準ノッチ信号Pmをどのように補正するか(延いては制御ノッチ信号をどのように生成するか)は種々の方法を採りうる。
【0108】
また、上記実施形態では、各電気負荷の稼働率が全て100%であって且つ乗車率100%のときにマスコン20のノッチに対応した所望の目標加速力が得られるよう、ノッチ毎に基準エンジン出力曲線を設定したが(図3参照)、これはあくまでも一例であって、電気負荷全体の稼働率及び乗車率をそれぞれどのように設定してノッチ毎の基準エンジン出力曲線を設定するかについては適宜考えられる。
【0109】
例えば、電気負荷全体の稼働率が50%であって且つ乗車率も50%であるときにマスコン20のノッチに対応した所望の目標加速力が得られるような基準エンジン出力曲線をノッチ毎に設定するようにしてもよい。この場合も、実際の電気負荷稼働率が50%より大きいか否かに応じて、また実際の乗車率が50%より大きいか否かに応じて、最終的にマスコンノッチに対応した目標加速力が得られるように基準ノッチ信号を補正すればよい。
【0110】
尚、補機負荷と車両重量の双方に応じて基準ノッチ信号Pmを補正する必要は必ずしも無く、補機負荷に応じた補正又は車両重量に応じた補正の何れか一方を省略してもよい。
逆に、補機駆動力(消費電力)と車両重量の2つに加えて更に、気動車の加速力に影響する他の要因(即ち、エンジン出力が一定であるにもかかわらず気動車の加速力の変動を生じさせるような他の要因)も考慮して、最終的にマスコンノッチに対応した目標加速度を得られる制御ノッチ指令を出力するように構成してもよい。
【0111】
また、上記実施形態では、補機負荷の変動或いは車両重量の変動が実際に生じた場合に、そのことを示す検出信号(負荷電力信号及び応荷重信号)に基づいて基準ノッチ信号を補正するようにしたが、それら変動を予め知ることができるようにして、実際に変動が起こる前に補正を済ませておくようにしてもよい。
【0112】
これを実現するために、例えば、コンプレッサ16や空調装置17などの各電気負荷をそれぞれ、自身の動作状態が変化する場合に、その動作状態の変化前の所定のタイミングで、その動作状態の変化により生じる補機負荷の変化内容(即ち補機駆動力の変化内容)を示す動作予告信号を出力するよう構成する。
【0113】
例えば空調装置17の場合、車内温度に応じて出力(消費電力)を段階的に自動調整できるよう構成し、例えば冷房中に車内温度が十分下がったことにより冷房出力を「強」から「弱」に自動切替する場合は、その切り替えに先立って、「強」から「弱」に切り替わる旨を示す信号、或いはその切り替わりによって消費電力がどの程度変化するか、延いては補機駆動力がどの程度変化するかを示す信号を、動作予告信号として出力する。
【0114】
各電気負荷からの動作予告信号は、エンジン制御部21内において補機負荷補正値演算部24に入力される。補機負荷補正値演算部24は、何れかの電気負荷から動作予告信号が入力された場合、その電気負荷の消費電力(補機負荷)が実際に変動する前に、動作予告信号に基づいて、その変動分に応じた補機負荷補正値αを演算する。
【0115】
そして、その補機負荷の変動が実際に起こる前に、その演算した補機負荷補正値αに従って、基準ノッチ信号Pmを補正する。これにより、例えば空調装置17の冷房出力が「強」から「弱」に切り替わる場合は、実際にそのように切り替わる前に、予め制御ノッチ信号を所定段階下げておくことができる。そのため、補機負荷の切り替わり時におけるエンジン出力の応答遅れに起因して加速力が急増或いは急減するのを抑えることができる。
【0116】
また、補機負荷の検出は、電源装置15からの負荷電力信号に基づく方法以外に、例えば、各電気負荷からそれぞれ消費電力を示す信号入力されてそれに基づいて検出する方法としてもよい。また、発電機12の発電電力を示す信号を送るようにしてもよい。また、発電機12の発電電力或いは電源装置15の出力を並列分岐してエンジン制御部21にも引き込み、シャント抵抗などを用いて消費電力を検出するようにしてもよい。
【0117】
また、上記実施形態では、電気負荷の消費電力を検出することによってこれらに用いられる補機駆動力を検出するようにしたが、補機駆動力をどのように検出するかについても種々考えられる。電気負荷以外の補機についても、そこで使われている駆動力を何らかの方法で直接又は間接的に検出できるならば、それも反映したより高精度の補正を行うことができる。
【0118】
また、本発明の適用は、エンジン2としてディーゼルエンジンを搭載した気動車に限定されるものではない。
【符号の説明】
【0119】
1…気動車、2…エンジン、3…変速機、4…推進軸、5,6…台車、5a,5b,6a,6b…空気バネ、7…終減速機、11…補機駆動軸、12…発電機、13…ラジエター、15…電源装置、16…コンプレッサ、17…空調装置、20…マスコン、21…エンジン制御部、22…基準ノッチ信号生成部、23…第1補正演算部、24…補機負荷補正値演算部、25…第2補正演算部、26…車両重量補正値演算部、30…応荷重センサ
【技術分野】
【0001】
本発明は、ディーゼル機関等のエンジン(内燃機関)を走行用駆動源として走行する気動車に用いられる、気動車用エンジン制御装置に関する。
【背景技術】
【0002】
従来、気動車のエンジンは、運転士が操作する主幹制御器(マスターコントローラ。以下「マスコン」という)からのノッチ指令に従い、エンジン出力がそのノッチ指令に応じた所望の値となるように制御される。例えば1ノッチなら、1ノッチに対応した所定の駆動力がエンジンから出力されるよう、エンジンへ供給・噴射される燃料の量が制御される。つまり、エンジン出力はノッチに応じて段階的に切り替えられるのである。
【0003】
そして、このように制御されたエンジンからの出力が、液体変速機や終減速機等を介して車軸・車輪に伝達され、これにより気動車が走行する。
ところで、気動車においては、エンジンから出力される駆動力は、走行用の駆動源としてだけでなく、空気圧縮機や空調装置、その他電気機器などの各種車載機器(以下「補機」ともいう) の駆動源としても用いられる。これら補機としては、エンジンから出力される機械エネルギーをそのまま利用して動作するものもあれば、発電機により機械エネルギーを電力に変換してその電力により動作するものもある。
【0004】
このような、走行用と補機駆動用の双方に出力が用いられる気動車のエンジンに対しては、エンジン自体の性能向上、延いては気動車全体の性能向上のために種々の制御方法が提案されている。例えば特許文献1には、複数のエンジンを有する気動車(列車)において、列車の必要とする負荷に応じ、燃費が最小となるように各エンジンを個別に制御する技術が記載されている。
【0005】
また、特許文献2には、複数のエンジンが搭載された気動車において、特定エンジンの劣化防止や良好な燃費状態の維持を目的として、エンジンの負荷に応じてエンジンの稼働数を決定すると共に、実際に稼働させるエンジンを変更することで各エンジンの使用頻度が略同一となるように制御する技術が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−198102号公報
【特許文献2】特開2005−83218号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、エンジン出力が走行用と補機駆動用の双方に用いられるが故に、上記各特許文献1,2に記載の技術では解決できない問題がある。それは、エンジン出力全体のうち液体変速機へ入力されて走行用駆動源として用いられる駆動力(以下「走行用駆動力」という)が、補機の動作状態によって変動してしまい、これにより安定した加速力が得られなくなるということである。
【0008】
即ち、走行用駆動力は、エンジン出力全体から、補機へ入力されて補機駆動源として用いられる駆動力(以下「補機駆動力」)を差し引いた分となることから、補機の動作状態が変動することによって補機駆動力が変動すると、それに応じて走行用駆動力も変動してしまう。そのため、補機駆動力の変動によって車両の加速力が変動し、安定した運転取り扱いの実現が困難であった。
【0009】
また、車両の加速力の変動は、補機の動作状態の変動以外にも、例えば車両重量の変動など、他の各種の車両状態の変動によっても生じうる。
本発明は上記課題に鑑みなされたものであり、車両状態の変動(補機駆動力の変動等)にかかわらず安定した加速力を得ることが可能な気動車用エンジン制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するためになされた請求項1に記載の発明は、エンジンを走行用駆動源として有すると共に、該エンジンを駆動源として動作する少なくとも1つの車載機器を有する気動車において、該エンジンを制御する気動車用エンジン制御装置である。
【0011】
エンジンは、異なる所定数の制御指令信号の何れかが入力され、制御指令信号毎に所定の目標加速力を発生させるために段階的に設定された基準エンジン出力のうち入力された制御指令信号に対応した基準エンジン出力を発生するよう構成されている。
【0012】
各基準エンジン出力は、気動車において、少なくとも車載機器の動作状態を含む、気動車の加速力に影響する加速力関連状態が、所定の基準状態である場合に、対応する目標加速力が得られるよう設定されている。
【0013】
そして、当該気動車用エンジン制御装置は、操作指令手段と、制御指令信号生成手段と、機器駆動力検出手段とを備えている。
操作指令手段は、エンジンへ各制御指令信号の何れかを選択的に出力するために操作され、各制御指令信号に対応した所定数の操作指令信号のうち上記操作により選択された何れかの操作指令信号を出力する。
【0014】
制御指令信号生成手段は、操作指令信号毎に、対応する制御指令信号が基準指令信号として予め設定されていると共に、操作指令手段から入力された操作指令信号に対応した基準指令信号を制御指令信号としてエンジンへ出力する。
【0015】
機器駆動力検出手段は、車載機器のうち少なくとも1つを検出対象機器として、エンジンから出力される基準エンジン出力のうちその検出対象機器の駆動源として用いられている分である機器駆動力を直接又は間接的に検出する。
【0016】
また、加速力関連状態として、少なくとも機器駆動力が含まれ、その機器駆動力に対する基準状態とは、その機器駆動力が所定の機器駆動力基準レベルである状態である。
そして、制御指令信号生成手段は、操作指令手段から操作指令信号が入力された場合、機器駆動力検出手段により検出された機器駆動力と機器駆動力基準レベルとの差異に基づき、その入力された操作指令信号に対応した基準指令信号をそのまま制御指令信号としてエンジンへ出力した場合にその基準指令信号に対応した目標加速力を含む所定範囲内の加速力が得られるか否か判断し、得られない場合は、その所定範囲内の加速力を得ることが可能な基準指令信号を選択して、その選択した基準指令信号を制御指令信号としてエンジンへ出力する。
【0017】
即ち、仮にエンジンからの出力が一定だとすると、機器駆動力が大きいほど、その分、エンジンからの出力のうち走行用駆動源として用いられる出力(走行用駆動力)は小さくなり、その分、車両(気動車)の加速力も低下してしまう。
【0018】
そこで本発明では、機器駆動力が変動しても走行用駆動力は変動しないよう、機器駆動力の変動に応じてエンジンからの基準エンジン出力も変動させる。つまり、従来のように操作指令信号に対応した基準指令信号をそのまま制御指令信号としてエンジンへ出力するのではなく、その基準指令信号で本来得られるべき所定範囲内の加速力が機器駆動力によって得られない場合は、操作指令信号に対応した基準指令信号ではなく、その所定範囲内の加速力を得ることが可能な他の基準指令信号を、制御指令信号としてエンジンへ出力する。
【0019】
このように、走行用駆動力と機器駆動力を総合したエンジン出力制御を行うことで、車載機器の動作状態の変動(機器駆動力の変動)にかかわらず、走行用駆動力の変動を抑制して安定した車両加速力を得ることが可能となる。
【0020】
尚、気動車の加速力に影響する加速力関連状態とは、エンジンの出力が一定であるにもかかわらず加速力の変動を生じさせるような要因を意味する。エンジン出力が一定であっても機器駆動力が変動するとそれに伴って走行用駆動力も変動し、加速力の変動を引き起こすため、機器駆動力も加速力関連状態の1つと言える。
【0021】
検出対象機器で実際に用いられている機器駆動力を具体的にどのようにして、どのような物理量として検出するかは種々考えられ、例えば消費電力として検出することができる。
【0022】
即ち、請求項2に記載の発明は、請求項1に記載の気動車用エンジン制御装置であって、気動車は、機器駆動力を電気エネルギーに変換する発電手段を備え、検出対象機器は、発電手段から供給される電力により駆動する電気負荷として構成されている。そして、機器駆動力検出手段は、機器駆動力として、検出対象機器で消費されている電力を検出する。
【0023】
電気負荷としての検出対象機器の消費電力が増えるほど発電手段による発電電力も増加し、発電電力が増えるほど、エンジン出力のうち検出対象機器の駆動源として用いられる分(詳しくは発電手段により電気エネルギーに変換される分)も増加する。そのため、検出対象機器の消費電力を検出することで、補機駆動力を間接的に検出することができるのである。
【0024】
このように、電気負荷である検出対象機器の消費電力を機器駆動力として検出することで、機器駆動力の検出を容易に行うことができる。
制御指令信号生成手段が機器駆動力に基づいて具体的にどのように制御指令信号としての基準指令信号を選択するかについても種々考えられるが、例えば請求項3に記載のように、機器駆動力に基づいて、操作指令信号に対応した基準エンジン出力を何段階増減させればよいかを判断して、その段階数だけ増減させた基準エンジン出力を発生させるための基準指令信号を制御指令信号として出力するようにすることができる。
【0025】
即ち、請求項3に記載の発明は、請求項1又は請求項2に記載の気動車用エンジン制御装置であって、第1増減情報生成手段を備えている。この第1増減情報生成手段は、機器駆動力以外の加速力関連状態はいずれも基準状態であるものとの仮定のもと、機器駆動力検出手段により検出された機器駆動力と機器駆動力基準レベルとの差異に基づいて、操作指令手段からの操作指令信号に対応した基準指令信号をそのまま制御指令信号として出力した場合にその基準指令信号に対応した所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま制御指令信号として出力してもよい旨を、得られないならばその所定範囲内の加速力を得るためにはその基準指令信号に対応した基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第1増減情報を出力するものである。
【0026】
そして、制御指令信号生成手段は、操作指令手段からの操作指令信号に対応した基準指令信号を、第1増減情報生成手段からの第1増減情報に従って、そのまま、若しくは上記段階数だけ増減した後の基準エンジン出力に対応した基準指令信号を、制御指令信号としてエンジンへ出力する。
【0027】
つまり、操作指令信号に対応した基準指令信号を基本としつつも、例えば機器駆動力が機器駆動力基準レベルよりも大きくてその基準指令信号に対応した基準エンジン出力では所定範囲内の加速力より小さい加速力しか得られない場合、その基準エンジン出力を何段階増加させれば所定範囲内の加速力が得られるかを判断し、その判断した段階だけ増加した基準エンジン出力に対応した基準指令信号を制御信号として選択・出力する。
【0028】
逆に、例えば機器駆動力が機器駆動力基準レベルよりも小さくてその基準指令信号に対応した基準エンジン出力では所定範囲内の加速力より大きい加速力が生じてしまう場合、その基準エンジン出力を何段階減少させれば所定範囲内の加速力が得られるかを判断し、その判断した段階だけ減少した基準エンジン出力に対応した基準指令信号を制御信号として選択・出力する。
【0029】
そのため、機器駆動力に応じた適切な制御指令信号の選択・出力を容易且つ確実に行うことができる。
ところで、気動車の加速力は、車載機器の動作状態の影響の他にも、車両重量の影響も受ける。具体的には、同じ走行用駆動力に対し、車両重量が増えれば増えるほど、車両の加速力は低くなってしまう。つまり、車両重量も、加速力の変動を生じさせる一要因であり、気動車の加速力に影響する加速力関連状態の1つである。
【0030】
そこで、上述した請求項1〜請求項3の何れか1項に記載の気動車用エンジン制御装置においては、更に、例えば請求項4に記載のように、車両重量も考慮して制御指令信号を選択・出力するようにするとよい。即ち、気動車の重量を直接又は間接的に検出する重量検出手段を備え、加速力関連状態として少なくとも重量が含まれるようにする。重量に対する基準状態とは、重量が所定の重量基準レベルである状態である。そして、制御指令信号生成手段は、操作指令手段から操作指令信号が入力された場合、機器駆動力検出手段により検出された機器駆動力と機器駆動力基準レベルとの差異、及び重量検出手段により検出された重量と重量基準レベルとの差異に基づき、その操作指令信号に対応した基準指令信号をそのまま制御指令信号としてエンジンへ出力した場合にその基準指令信号に対応した所定範囲内の加速力が得られるか否か判断し、得られない場合は、その所定範囲内の加速力を得ることが可能な基準指令信号を選択して、その選択した基準指令信号を制御指令信号としてエンジンへ出力する。
【0031】
このように、機器駆動力に加えてさらに車両重量も考慮して制御指令信号を選択することで、車両重量にかかわらず安定した車両加速力を得ることも可能となる。
制御指令信号生成手段が重量に基づいて具体的にどのように制御指令信号としての基準指令信号を選択するかについても種々考えられるが、例えば請求項5に記載のように、重量に基づいて、操作指令信号に対応した基準エンジン出力を何段階増減させればよいかを判断し、その判断結果と機器駆動力に基づく上記判断結果とを総合した段階数だけ増減させた基準エンジン出力を発生させるための基準指令信号を、制御指令信号として出力するようにすることができる。
【0032】
即ち、請求項5に記載の発明は、請求項3に記載の気動車用エンジン制御装置であって、気動車の重量を直接又は間接的に検出する重量検出手段を備え、加速力関連状態として少なくとも重量が含まれるようにする。重量に対する基準状態とは、重量が所定の重量基準レベルである状態である。
【0033】
また、第2増減情報生成手段を備えている。この第2増減情報生成手段は、重量以外の加速力関連状態はいずれも基準状態であるものとの仮定のもと、重量検出手段により検出された重量と重量基準レベルとの差異に基づいて、操作指令手段からの操作指令信号に対応した基準指令信号をそのまま制御指令信号として出力した場合にその基準指令信号に対応した所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま制御指令信号として出力してもよい旨を、得られないならばその所定範囲内の加速力を得るためにはその基準指令信号に対応した基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第2増減情報を出力するものである。
【0034】
そして、制御指令信号生成手段は、操作指令手段からの操作指令信号に対応した基準指令信号を、第1増減情報生成手段からの第1増減情報及び第2増減情報生成手段からの第2増減情報に従って、そのまま、若しくは各増減後の基準エンジン出力に対応した基準指令信号を、制御指令信号としてエンジンへ出力する。
【0035】
つまり、操作指令信号に対応した基準指令信号を基本としつつも、機器駆動力及び車両重量の双方に応じて、その機器駆動力及び車両重量においても操作指令信号に対応した所望の加速力が得られるよう、その加速力発生に必要な基準指令信号を選択する。
【0036】
例えば、機器駆動力が機器駆動力基準レベルよりも大きいことにより第1増減情報として基準エンジン出力を所定段階(例えば2段階)増加させるべき旨が出力され、且つ、車両重量が重量基準レベルよりも小さいことにより第2増減情報として基準エンジン出力を所定段階(例えば1段階)減少させるべき旨が出力された場合は、両者を総合した所定段階数だけ増減(上記例では2段階増加と1段階減少を総合して1段階増加)した基準エンジン出力が出力されるようにする。即ち、操作指令信号に対応した基準指令信号に代えて、その基準指令信号より1段階上の基準指令信号を制御指令信号として出力するのであり、これにより、結果として得られる車両の加速力は、操作指令信号に対応した基準指令信号に対する所定範囲内の加速力となる。
【0037】
このように、操作指令信号に対応した基準指令信号に対し、第1増減情報及び第2増減情報に基づいて、必要に応じて(即ち所定範囲内の加速力が得られるように)その基準指令信号とは異なる他の基準指令信号を選択することで、機器駆動力及び車両重量の双方に応じた適切な値の制御指令信号の選択・出力を容易且つ確実に行うことができる。
【図面の簡単な説明】
【0038】
【図1】実施形態の気動車の床下機器配置図である。
【図2】実施形態のエンジン制御システムの概略構成を表す構成図である。
【図3】ノッチ毎の基準エンジン出力曲線の一例を表す説明図である。
【図4】補機負荷に応じてエンジンに入力される制御ノッチ信号が変化することを説明するための説明図である。
【図5】実施形態のエンジン制御システムの動作例を表す説明図である。
【発明を実施するための形態】
【0039】
以下に、本発明の好適な実施形態を図面に基づいて説明する。
図1に示すように、本発明が適用された実施形態の気動車1は、その床下に、走行用駆動源であるエンジン2が配置され、床下における車両両端側にはそれぞれ、台車5,6が配置されている。
【0040】
エンジン2は、ディーゼルエンジンである。このエンジン2は、異なる所定数(複数段階)の制御ノッチ信号(本発明の制御指令信号に相当)の何れかが入力されて動作するものであり、後述するように、入力される制御ノッチ信号毎に出力特性(基準エンジン出力曲線)が予め定められている。
【0041】
また、気動車1の床下には、エンジン2の出力を一方の台車5の車輪に伝達するための、変速機3、推進軸4、終減速機7,8などからなる伝達機構が配置されている。つまり、エンジン2の出力は、変速機3、推進軸4、各終減速機7,8によって順次伝達され、最終的に車軸・車輪に伝達されて、これにより気動車1が走行することとなる。これら伝達機構の構成はよく知られているため、ここではその説明は省略する。尚、変速機3は、トルクコンバータを備えた周知の液体変速機である。
【0042】
また、エンジン2の出力は、上記のように走行用駆動源として用いられるだけでなく、各種補機の駆動源としても用いられる。即ち、エンジン2の出力は、補機駆動軸11を介して、発電機12やラジエター13などの各種補機にも伝達され、これによりこれら各種補機が駆動されることとなる。これら各種補機の中には、例えばコンプレッサ16や空調装置17など(後述の図2参照)、エンジン2の出力によって直接駆動されるものではないものの発電機12の発電電力によって動作する各種の電気負荷も含まれている。
【0043】
また、各台車5,6にはそれぞれ、いわゆるエアーサスペンションとして機能する周知の空気バネが取り付けられている。即ち、一方の台車5にはその中央部における車両幅方向の両端部にそれぞれ空気バネ5a,5bが取り付けられ、他方の台車6にもその中央部における車両幅方向の両端部にそれぞれ空気バネ6a,6bが取り付けられている。
【0044】
そして、一方の台車5の各空気バネ5a,5bには、それぞれ応荷重センサ30(図2参照)が取り付けられている。この応荷重センサ30は、気動車1の重量(車両重量)を検出するためのものであり、直接的には対応する空気バネの内圧を検出し、その検出結果に応じた応荷重信号を出力する。
【0045】
次に、エンジン2の具体的制御について、図2を用いて説明する。図2は、気動車1に構築されてエンジン制御システムの概略構成を示すものである。
気動車1の床下には、図1では図示を省略したものの、エンジン2及び変速機3を制御するための変速機制御装置が備えられており、この変速機制御装置からの制御信号によってエンジン2及び変速機3が制御される。そして、この変速機制御装置の中に、図2に示すような、エンジン2の制御を担うエンジン制御部21が備えられている。
【0046】
エンジン制御部21は、基準ノッチ信号Pmを生成する基準ノッチ信号生成部22と、補機負荷補正値αを演算する補機負荷補正値演算部24と、基準ノッチ信号Pmを補機負荷補正値αで補正演算して第1補正ノッチ信号を生成する第1補正演算部23と、車両重量補正値βを演算する車両重量補正値演算部26と、第1補正ノッチ信号を車両重量補正値βで補正演算して第2補正ノッチ信号を生成する第2補正演算部25とを備えている。そして、第2補正演算部25で生成された第2補正ノッチ信号が、制御ノッチ信号として、エンジン2に入力される。
【0047】
基準ノッチ信号生成部22は、図示しない運転台に設けられたマスコン20からのノッチ指令信号(本発明の操作指令信号に相当)に基づき、ノッチ毎に予め設定された基準ノッチ信号Pm(本発明の基準指令信号に相当)を生成・出力する。
【0048】
本実施形態では、マスコン20において例えば1ノッチ〜nノッチの何れかに選択的に切り替え設定でき、マスコン20から各ノッチに応じたノッチ指令信号が出力される。そして、基準ノッチ信号生成部22においては、ノッチ毎の各ノッチ指令信号に対応した基準ノッチ信号Pm(=P1〜Pn)のうち、入力されたノッチ指令信号に対応した基準ノッチ信号Pm、即ちマスコン20において現在設定されているノッチに対応した基準ノッチ信号Pmが生成される。この基準ノッチ信号Pmは、これをそのまま制御ノッチ信号としてエンジン2に出力すればノッチに応じた所定のエンジン出力(基準エンジン出力)が得られるものである。
【0049】
図3に、ノッチ毎(即ち基準ノッチ信号Pm毎)の、エンジン回転数に対するエンジン出力(図3では馬力で表示)の変化を示す。本実施形態のエンジン2は、図3に示す最高エンジン出力曲線の範囲内において、基準ノッチ信号毎に段階的に異なる基準エンジン出力曲線が設定されている。
【0050】
つまり、例えばマスコン20が5ノッチに操作・選択されてその旨を示すノッチ指令信号がエンジン制御部21に入力された場合は、基準ノッチ信号生成部22にて、5ノッチに対応した基準ノッチ信号P5が生成される。そして、この5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号としてエンジン2に入力したならば、エンジン2は、図3に示す各曲線のうちP5に対応した基準エンジン出力曲線に沿って動作することとなる。
【0051】
また、本実施形態では、気動車1に発生させるべき目標加速度がノッチ毎に段階的に設定されている。即ち、1ノッチからnノッチまで目標加速度が段階的に増加するように、ノッチ毎に目標加速度が設定されている。そして、各ノッチに対応した各基準エンジン出力曲線、即ち各基準ノッチ信号Pmに対応した各基準エンジン出力曲線は、それぞれ、ある一定条件の下でその基準エンジン出力曲線に沿ってエンジン2を動作させたならばその基準エンジン出力曲線に対応した基準ノッチ信号Pmに対して設定されている目標加速度が得られるように決められている。
【0052】
ここでいう一定条件とは、本発明の基準状態に相当するものであって、本実施形態では、少なくとも、エンジン出力のうち補機駆動用に用いられる(即ち補機駆動軸11側に出力される)分である補機駆動力、及び車両重量を含む、気動車1の加速力に影響する各種の車両状態に対して予め定められている。
【0053】
具体的には、補機駆動力及び車両重量については、発電機12の発電電力によって動作する各種電気負荷の稼働率が全て100%の場合(即ち各電気負荷が全て最大定格電力にて動作している場合)の補機駆動力、且つ、乗客の乗車率が100%のとき(即ち予め決められた乗車定員と同人数の乗客が乗車しているとき)に想定される車両重量を、上記一定条件としている。
【0054】
つまり、各電気負荷の稼働率が全て100%であって且つ乗車率100%のときにマスコン20にて何れかのノッチが選択された場合に、そのノッチに対応した基準ノッチ信号Pmをそのまま制御ノッチ信号としてエンジン2に出力することによりエンジン2をその基準ノッチ信号Pmに対応した基準エンジン出力曲線に沿って動作させたならば、気動車1はそのノッチに対応した目標加速力を得ることができる。
【0055】
尚、補機駆動力及び車両重量は、いずれも、これらが変動すると気動車1の加速力に変動を生じさせるおそれのあるものであり、本発明の加速力関連状態に相当するものである。また、上記一定条件としての、各電気負荷の稼働率が全て100%であるときの補機駆動力は本発明の機器駆動力基準レベルに相当し、乗車率100%であるときの車両重量は本発明の重量基準レベルに相当する。
【0056】
本実施形態では、原則的には、マスコン20にて操作されているノッチに対応した基準ノッチ信号Pmをそのまま制御ノッチ信号としてエンジン2へ出力することを、動作の基本としている。
【0057】
しかし、ノッチに対応した目標加速力を得るべく、そのノッチに対応した基準ノッチ信号Pmをそのまま制御ノッチ信号としてエンジン2に入力するようにすると、エンジン2の出力(エンジン出力)はそのノッチに対応して予め決められた基準エンジン出力曲線に従って制御されることになるため、補機の動作状態が変動すると補機駆動力が変動し、これによりエンジン出力のうち走行用に用いられる(即ち変速機3側に出力される)分である走行用駆動力も変動し、実際に得られる加速力も変動してしまう。
【0058】
また、補機の動作状態だけでなく、車両重量が変動することによっても、実際に得られる加速力は変動してしまう。
そのため、補機の動作状態や車両重量によっては、ノッチに対応した目標加速力とは異なる加速力が生じてしまい、安定した運転の取り扱いが困難となってしまう。具体的には、本例の場合、各電気負荷の稼働率が全て100%であって且つ乗車率100%のときを基準に目標加速力、基準エンジン出力曲線が設定されているため、実際の電気負荷の稼働率が低いほど、また実際の乗車率が低いほど、ノッチに対応した目標加速力よりも大きな加速力が発生してしまうことになる。
【0059】
そこで本実施形態では、補機(本例では特に電気負荷)の動作状態の変化によって補機駆動力が変動しても加速力の変動を抑制できるよう、また、車両重量が変動しても加速力の変動を抑制できるよう、補機駆動力及び車両重量に応じて基準ノッチ信号Pmを補正し、補正後の基準ノッチ信号Pmを制御ノッチ信号としてエンジン2へ出力するようにしている。
【0060】
そして、その補正を行うために、エンジン制御部21に、補機負荷補正値演算部24、第1補正演算部23、車両重量補正値演算部26、及び第2補正演算部25が備えられている。
【0061】
気動車1に備えられた各種補機には、既述の通り、エンジン2から補機側への出力(補機駆動力)を受けて直接駆動される発電機12やラジエター13等のほか、発電機12の発電電力によって動作する、コンプレッサ16や空調装置17等の各種電気負荷がある。
【0062】
本実施形態のエンジン制御部21は、これら各種電気負荷の消費電力を検出することによって、補機駆動力のうちこれら各種電気負荷に用いられる分を間接的に検出・取得するよう構成されている。
【0063】
即ち、発電機12の発電電力は電源装置15に入力され、この電源装置15において各電気負荷の動作に必要な電力に変換されて各電気負荷へ供給される。電源装置15は、各電気負荷へ供給する電力の総量(以下「補機負荷」ともいう)を検出し、その検出結果である負荷電力信号をエンジン制御部21へ出力するよう構成されている。
【0064】
この負荷電力信号は、補機駆動力のうち各種電気負荷の駆動に用いられる分を間接的に示すものであり、エンジン制御部21は、この負荷電力信号を取得することで、補機駆動力のうち少なくとも各電気負荷に用いられる分を間接的に検出することができる。
【0065】
尚、電源装置15自体も電気負荷の一種であるため、負荷電力信号として、電源装置15で消費されている電力も含めたものを出力するようにしてもよい。また、補機が全て電気負荷であれば、補機駆動力全てを間接的に検出することができる。
【0066】
電源装置15からの負荷電力信号は、エンジン制御部21において、補機負荷補正値演算部24に入力される。補機負荷補正値演算部24は、入力された負荷電力信号に基づき、補機負荷補正値α(本発明の第1増減情報に相当)を演算する。
【0067】
具体的には、補機駆動力以外の他の各種車両状態は上記一定条件であるとの仮定のもと、入力された負荷電力信号が示す補機負荷と、予め設定された補機負荷基準レベル(本例では各電気負荷の稼働率が100%のときの補機負荷)との差異に基づいて、マスコン20からのノッチ指令信号に対応した基準ノッチ信号Pmをそのまま制御ノッチ信号として出力した場合にその基準ノッチ信号Pmに対応した目標加速力が得られるか否か判断する。
【0068】
そして、得られるならばその基準ノッチ信号Pmをそのまま制御ノッチ信号として出力してもよい旨を、得られないならばその目標加速力を得るためにはその基準ノッチ信号Pmに対応した基準エンジン出力曲線から何段階増減させる必要があるかを、それぞれ示す補機負荷補正値αを出力する。
【0069】
尚、目標加速力と全く同じ加速力が得られるかといった厳密な判断をしてもよいが、ある程度幅を持たせて判断してもよく、本例では、ノッチ毎の各目標加速力について、それぞれ、その目標加速力を含む所定の加速力範囲を目標加速力範囲として、その目標加速力範囲内の加速力が得られるか否か判断するようにしている。この目標加速力範囲は、目標加速力を含む限り適宜決めることができるが、本例では、実際に得られる加速力が目標加速力を下回らないよう、目標加速力を含み且つその目標加速力以上の所定の範囲が、目標加速力範囲として設定されている。
【0070】
そのため、例えばマスコン20が5ノッチに操作・選択されている場合であって、電源装置15から入力されている負荷電力信号が示す補機負荷が補機負荷基準レベルと同等の場合は、少なくとも補機負荷に関しては5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号としてエンジン2へ出力することで5ノッチに対応した目標加速力範囲内の加速力が得られると判断して、基準ノッチ信号P5をそのまま出力すべき旨の補記負荷補正値αを生成、出力する。
【0071】
一方、例えばマスコン20が5ノッチに操作・選択されているものの、電源装置15から入力されている負荷電力信号が示す補機負荷が補機負荷基準レベルより小さく、5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号したのでは5ノッチに対応した目標加速力範囲よりも大きい加速力が発生してしまうと判断した場合は、5ノッチに対応した基準エンジン出力曲線よりも何段階下の基準エンジン出力曲線を用いれば5ノッチに対応した目標加速力範囲内の加速力を得られるか判断する。
【0072】
この段階数は、現在の補機負荷と補機負荷基準レベルとの差異に基づき、例えば閾値を1つ又は段階的に複数用意して、上記差異と各閾値との比較結果に応じて決めることができる。例えば閾値を1つ設定し、上記差異がその閾値以下ならば1段階下げるようにし、上位差異がその閾値を超えていたら2段階下げるようにする、といった方法が考えられる。勿論これはあくまでも一例に過ぎない。そして、その判断した段階数を示す補機負荷補正値αを生成、出力する。
【0073】
第1補正演算部23は、基準ノッチ信号生成部22からの基準ノッチ信号Pmを、補機負荷補正値演算部24からの補機負荷補正値αに従って、そのまま、若しくは変更して、第1補正ノッチ信号を算出し出力する。
【0074】
即ち、例えばマスコン20が5ノッチに操作・選択されている場合に、補機負荷補正値αが、例えば、基準ノッチ信号生成部22からの基準ノッチ信号P5をそのまま出力してもよい(増減は不要である)旨を示すものであれば、基準ノッチ信号P5をそのまま第1補正ノッチ信号P5として出力する。また例えば、補機負荷補正値αが、基準ノッチ信号生成部22からの基準ノッチ信号P5を1段階下げるべき旨を示すものであれば、基準ノッチ信号P5からその段階数だけ下の基準ノッチ信号P4を第1補正ノッチ信号P4として出力する。
【0075】
車両重量補正値演算部26は、各台車5、6にそれぞれ取り付けられた応荷重センサ30からの応荷重信号に基づき、車両重量補正値β(本発明の第2増減情報に相当)を演算する。
【0076】
具体的には、車両重量以外の他の各種車両状態は上記一定条件であるとの仮定のもと、入力された応荷重信号が示す車両重量と、予め設定された重量基準レベル(本例では乗車率100%のときの車両重量)との差異に基づいて、マスコン20からのノッチ指令信号に対応した基準ノッチ信号Pmをそのまま制御ノッチ信号として出力した場合にその基準ノッチ信号Pmに対応した目標加速力が得られるか否か判断する。
【0077】
そして、得られるならばその基準ノッチ信号Pmをそのまま制御ノッチ信号として出力してもよい旨を、得られないならばその目標加速力を得るためにはその基準ノッチ信号Pmに対応した基準エンジン出力曲線から何段階増減させる必要があるかを、それぞれ示す車両重量補正値βを出力する。
【0078】
尚、この場合も、目標加速力と全く同じ加速力が得られるかといった厳密な判断をしてもよいが、本例では、補機負荷補正値αの演算と同様、ノッチ毎に設定された目標加速力範囲内の加速力が得られるか否か判断するようにしている。
【0079】
そのため、例えばマスコン20が5ノッチに操作・選択されている場合であって、乗車率が100%の場合(即ち車両重量が重量基準レベルと同等の場合)は、少なくとも車両重量に関しては5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号としてエンジン2へ出力することで5ノッチに対応した目標加速力範囲内の加速力が得られると判断して、第1補正演算部23からの第1補正ノッチ信号をそのまま出力すべき旨の車両重量補正値βを生成、出力する。
【0080】
一方、例えばマスコン20が5ノッチに操作・選択されているものの、乗車率が例えば50%程度であって、5ノッチに対応した基準ノッチ信号P5をそのまま制御ノッチ信号したのでは5ノッチに対応した目標加速力範囲よりも大きい加速力が発生してしまうと判断した場合は、5ノッチに対応した基準エンジン出力曲線よりも何段階下の基準エンジン出力曲線を用いれば5ノッチに対応した目標加速力範囲内の加速力を得られるか判断する。
【0081】
この段階数は、現在の車両重量と重量基準レベルとの差異に基づき、上述した補機負荷補正値演算部24における段階数判断と同様、例えば閾値を1つ又は段階的に複数用意して、上記差異と各閾値との比較結果に応じて決めることができる。そして、その判断した段階数を示す車両重量補正値βを生成、出力する。
【0082】
第2補正演算部25は、第1補正演算部23からの第1補正ノッチ信号を、車両重量補正値演算部26からの車両重量補正値βに従って、そのまま、若しくは変更して、第2補正ノッチ信号を算出し出力する。そして、この第2補正演算部25からの第2補正ノッチ信号が、制御ノッチ信号としてエンジン2へ入力される。
【0083】
即ち、例えばマスコン20が5ノッチに操作・選択されている場合であって第1補正演算部23からはその5ノッチに対応した基準ノッチ信号P5がそのまま第1補正ノッチ信号として出力されている場合に、車両重量補正値βが、例えば増減は不要である旨を示すものであれば、その第1補正ノッチ信号としての基準ノッチ信号P5をそのまま第2補正ノッチ信号として出力する。そのため、この場合は、実際のマスコン20のノッチ指令に対応した基準ノッチP5がそのまま制御ノッチ信号としてエンジン2へ出力されることとなる。
【0084】
また例えば、車両重量補正値βが、入力された基準ノッチ信号P5を1段階下げるべき旨を示すものであれば、基準ノッチ信号P5からその段階数だけ下の基準ノッチ信号P4を第2補正ノッチ信号として出力する。そのため、この場合は、実際のマスコン20からのノッチ指令とは異なる基準ノッチP4が、制御ノッチ信号としてエンジン2へ出力されることとなる。しかし、得られる車両加速度は、実際のマスコン20のノッチ指令である5ノッチに対応した目標加速力範囲内のものとなる。
【0085】
また例えば、マスコン20が5ノッチに操作・選択されていて基準ノッチ信号生成部22からはその5ノッチに対応した基準ノッチ信号P5が出力されているものの、補機負荷が少ないことによって、第1補正演算部にて例えば2段階下の基準ノッチ信号P3が第1補正ノッチ信号として出力されている場合に、車両重量補正値βが、基準ノッチ信号を2段階下げるべき旨を示すものであれば、入力された第1補正ノッチ信号である基準ノッチ信号P3よりもさらに2段階下の基準ノッチ信号P1を、第2補正ノッチ信号として出力する。そのため、この場合は、実際のマスコン20からのノッチ指令とは異なる基準ノッチP1が、制御ノッチ信号としてエンジン2へ出力されることとなる。しかしこの場合も、得られる車両加速度は、実際のマスコン20のノッチ指令である5ノッチに対応した目標加速力範囲内のものとなる。
【0086】
図4に、補機負荷の変動によって制御ノッチ信号が補正されること、及びその補正の過程での変速機3に入力されるトルク(走行用駆動力)の変動の具体例を示す。図4の例は、電気負荷全体の稼働率が100%から50%に変化した場合の例を示すものである。尚、補機負荷以外の各車両状態は全て上記一定条件であることが前提となっている。
【0087】
図4に示すように、マスコン20が15ノッチに設定されていて電気負荷全体の稼働率が100%の場合は、エンジン2にはその15ノッチに対応した基準ノッチ信号P15がそのまま制御ノッチ信号として入力され、変速機3に入力されるトルクは、エンジン回転数に応じて図中実線で示すようなカーブを描く。
【0088】
その後、電気負荷全体の稼働率が50%に減少すると、エンジン2からの出力のうち補機駆動のための補機駆動力が減少し、その分が走行用駆動力に上乗せされることになるため、変速機3に入力されるトルクは、図中2点鎖線で示すようなカーブを描くことになる。そのため、このままでは、15ノッチに対応した目標加速力範囲よりも大きい加速力が発生してしまう。
【0089】
これに対し、本実施形態では、補機負荷補正値演算部24が、負荷電力信号に基づいて、加速力を15ノッチに対応した目標加速力範囲内に抑えるためには基準ノッチ信号を2段階下げる必要があると判断し、その旨を示す補機負荷補正値αを出力する。そして、その補機負荷補正値αに基づき、第1補正演算部23が、入力された基準ノッチ信号P15より2段階下の基準ノッチ信号P13を第1補正ノッチ信号として出力する。
【0090】
これにより、他の車両状態は一定条件であることから、その第1補正ノッチ信号である基準ノッチ信号P13が制御ノッチ信号としてエンジン2へ出力される。つまり、マスコン20は15ノッチであるもののエンジン2には13ノッチに対応した基準ノッチ信号P13が入力されるのである。
【0091】
そしてこれにより、変速機3に入力されるトルクは、図中破線で示すようなカーブを描く。このカーブは、稼働率100%のときのカーブ(図中実線)にごく近いものである。そのため、マスコン20のノッチは15ノッチのままでありながら、電気負荷全体の稼働率が100%から50%に低減しても、15ノッチに対応した所望の目標加速力範囲内の加速力を得ることができる。
【0092】
次に、上記のように構成された本実施形態のエンジン制御部21の動作例について、図5を用いて説明する。尚、図5の動作例は、説明の簡略化のために、補機負荷以外の他の各車両状態はいずれも上記一定条件である(つまり乗車率は100%である)ことを前提としている。
【0093】
図5に示すように、時刻t1にて運転士によりマスコン20が5ノッチに操作されると、5ノッチに対応した目標加速力範囲内の加速力が得られるよう、エンジン2へ制御ノッチ信号が出力される。このとき、補機負荷は0(詳しくは、各電気負荷の稼働率が0%であって発電電力が0)であることから、実際のノッチ(5ノッチ)よりも2段階低い3ノッチに対応した基準ノッチ信号P3がエンジン2へ出力される。但し、これにより得られる車両の加速度は、マスコン20の5ノッチに対応した目標加速力範囲内の加速力となる。
【0094】
尚、仮にマスコンノッチに対応した基準ノッチ信号P5がそのままエンジン2へ出力された場合、補機負荷が0であるが故に、車両の加速度は5ノッチに対応した目標加速力範囲より大きなものとなってしまうが、本実施形態ではそのような加速力増大を抑制することができる。
【0095】
その後、時刻t2でマスコン20が6ノッチに操作されると、このときも時刻t1のときと同様に補機負荷は0であることから、実際のノッチ(6ノッチ)よりも2段階低い4ノッチに対応した基準ノッチ信号P4がエンジン2へ出力される。但し、これにより得られる車両の加速度は、マスコン20の6ノッチに対応した目標加速力範囲内の加速力となる。
【0096】
尚、このときも、仮にマスコンノッチに対応した基準ノッチ信号P6がそのままエンジン2へ出力された場合、補機負荷が0であるが故に、車両の加速度は6ノッチに対応した目標加速力範囲より大きなものとなってしまうが、本実施形態ではそのような加速力増大を抑制することができる。
【0097】
そして、時刻t3にて、例えばいくつかの電気負荷が動作を開始したことによって補機負荷が50%(詳しくは電気負荷全体の稼働率が50%)に増加すると、その分、走行用駆動力が減少して加速力が減少してしまうが、本実施形態では、その補機負荷増加を検知して、第1補正演算部23により基準ノッチ信号がP4から1段階上のP5に補正される。そして、その補正後の基準ノッチ信号P5が制御ノッチ信号としてエンジン2に入力される(時刻t4)。そのため、時刻t3〜t4の間で制御応答遅れによる若干の変動はあるものの、車両の加速度は、マスコン20の6ノッチに対応した目標加速力範囲内が維持される。
【0098】
つまり、マスコン20のノッチは不変ながらも、エンジン制御部21内の補正によって補機負荷に応じた適切な基準ノッチ信号を出力することで、補機負荷の変動分が補われ、マスコンノッチに対応した目標加速力範囲内の加速力を維持することができるのである。
【0099】
その後、時刻t5にて、稼働中の電気負荷のいくつかが停止又は出力低下したことによって補機負荷が20%(詳しくは電気負荷全体の稼働率が20%)に減少すると、その分、走行用駆動力が増加して加速力が増加してしまうが、本実施形態では、その補機負荷減少を検知して、第1補正演算部23により基準ノッチ信号がP5から1段階下のP4に補正される。そして、その補正後の基準ノッチ信号P4が制御ノッチ信号としてエンジン2に入力される(時刻t6)。そのため、時刻t5〜t6の間で制御応答遅れによる若干の変動はあるものの、車両の加速度は、マスコン20の6ノッチに対応した目標加速力範囲内が維持される。
【0100】
なお、この時刻t6以降(〜時刻t7)の制御ノッチ信号は、時刻t2〜t3の間と同じく、4ノッチに対応した基準ノッチ信号P4であるが、時刻t2〜t3の間は補機負荷が0%であったのに対し、時刻t6〜t7では補機負荷が20%と若干の補機が動作している。そのため、時刻t6〜t7の間の車両の加速力は、時刻t2〜t3の間の加速力よりも若干低くなっている。但し、いずれもマスコン20の6ノッチに対応した目標加速力範囲内にある。
【0101】
その後、時刻t7にて、補機負荷が再び0%になり、これにより加速力が上昇し始めるが、本例ではここで、補機負荷変動に基づく基準ノッチ信号の補正を行う前に運転士がマスコン20のノッチを6ノッチから3ノッチに切り替えている。そのため、エンジン2へ出力される制御ノッチ指令は、その切り替え後のマスコン20の3ノッチに対し、補機負荷0%を考慮して2段階下に補正された基準ノッチ信号P1となる。これにより、車両の加速度は、マスコン20の3ノッチに対応した目標加速力範囲内に維持される。
【0102】
以上説明したように、本実施形態のエンジン制御部21は、単にマスコン20からのノッチ指令信号に対応した基準ノッチ信号Pmをそのまま制御ノッチ信号として出力するのではなく、補機負荷及び車両重量に応じて基準ノッチ信号Pmを補正し、その補正後の基準ノッチ信号を制御ノッチ信号として出力する。
【0103】
このように、走行用駆動力と補機駆動力を総合したエンジン出力制御を行うことで、補機(但し本実施形態では電気負荷のみ)の動作状態の変動(補機負荷の変動)にかかわらず、走行用駆動力の変動を抑え、これにより車両の加速力の変動を抑えて安定した加速力を得ることが可能となる。そして、加速力の変動を抑制できることから、安定した運転取扱いが実現できる。
【0104】
また、本実施形態では、各電気負荷の消費電力を補機負荷として検出することで、これら電気負荷の駆動に用いられる補機駆動力を間接的に検出するようにしている。そのため、補機負荷の検出(延いては補機駆動力の検出)を容易に行うことができる。
【0105】
また、本実施形態では、補機負荷に応じた制御ノッチ信号の生成を、具体的には、基準ノッチ信号Pmを、補機負荷に応じて演算された補機負荷補正値αが示す段階数だけ増減させることにより行っている。そのため、補機駆動力に応じた適切な制御ノッチ信号の生成を容易且つ確実に行うことができる。
【0106】
また、補機駆動力に加えてさらに車両重量も考慮して制御ノッチ信号を生成することで、車両重量にかかわらず安定した加速力を得ることも可能となる。
[変形例]
以上、本発明の実施の形態について説明したが、本発明の実施の形態は、上記実施形態に何ら限定されるものではなく、本発明の技術的範囲に属する限り種々の形態を採り得ることはいうまでもない。
【0107】
例えば、上記実施形態では、マスコン20のノッチに対応した基準ノッチ信号Pmに対し、各補正値α、βに基づいて補正(所定段階増減)することにより制御ノッチ信号を得るようにしたが、これはあくまでも一例であり、補機負荷及び車両重量によらずマスコン20のノッチに対応した所望の加速力を得ることができる限り、基準ノッチ信号Pmをどのように補正するか(延いては制御ノッチ信号をどのように生成するか)は種々の方法を採りうる。
【0108】
また、上記実施形態では、各電気負荷の稼働率が全て100%であって且つ乗車率100%のときにマスコン20のノッチに対応した所望の目標加速力が得られるよう、ノッチ毎に基準エンジン出力曲線を設定したが(図3参照)、これはあくまでも一例であって、電気負荷全体の稼働率及び乗車率をそれぞれどのように設定してノッチ毎の基準エンジン出力曲線を設定するかについては適宜考えられる。
【0109】
例えば、電気負荷全体の稼働率が50%であって且つ乗車率も50%であるときにマスコン20のノッチに対応した所望の目標加速力が得られるような基準エンジン出力曲線をノッチ毎に設定するようにしてもよい。この場合も、実際の電気負荷稼働率が50%より大きいか否かに応じて、また実際の乗車率が50%より大きいか否かに応じて、最終的にマスコンノッチに対応した目標加速力が得られるように基準ノッチ信号を補正すればよい。
【0110】
尚、補機負荷と車両重量の双方に応じて基準ノッチ信号Pmを補正する必要は必ずしも無く、補機負荷に応じた補正又は車両重量に応じた補正の何れか一方を省略してもよい。
逆に、補機駆動力(消費電力)と車両重量の2つに加えて更に、気動車の加速力に影響する他の要因(即ち、エンジン出力が一定であるにもかかわらず気動車の加速力の変動を生じさせるような他の要因)も考慮して、最終的にマスコンノッチに対応した目標加速度を得られる制御ノッチ指令を出力するように構成してもよい。
【0111】
また、上記実施形態では、補機負荷の変動或いは車両重量の変動が実際に生じた場合に、そのことを示す検出信号(負荷電力信号及び応荷重信号)に基づいて基準ノッチ信号を補正するようにしたが、それら変動を予め知ることができるようにして、実際に変動が起こる前に補正を済ませておくようにしてもよい。
【0112】
これを実現するために、例えば、コンプレッサ16や空調装置17などの各電気負荷をそれぞれ、自身の動作状態が変化する場合に、その動作状態の変化前の所定のタイミングで、その動作状態の変化により生じる補機負荷の変化内容(即ち補機駆動力の変化内容)を示す動作予告信号を出力するよう構成する。
【0113】
例えば空調装置17の場合、車内温度に応じて出力(消費電力)を段階的に自動調整できるよう構成し、例えば冷房中に車内温度が十分下がったことにより冷房出力を「強」から「弱」に自動切替する場合は、その切り替えに先立って、「強」から「弱」に切り替わる旨を示す信号、或いはその切り替わりによって消費電力がどの程度変化するか、延いては補機駆動力がどの程度変化するかを示す信号を、動作予告信号として出力する。
【0114】
各電気負荷からの動作予告信号は、エンジン制御部21内において補機負荷補正値演算部24に入力される。補機負荷補正値演算部24は、何れかの電気負荷から動作予告信号が入力された場合、その電気負荷の消費電力(補機負荷)が実際に変動する前に、動作予告信号に基づいて、その変動分に応じた補機負荷補正値αを演算する。
【0115】
そして、その補機負荷の変動が実際に起こる前に、その演算した補機負荷補正値αに従って、基準ノッチ信号Pmを補正する。これにより、例えば空調装置17の冷房出力が「強」から「弱」に切り替わる場合は、実際にそのように切り替わる前に、予め制御ノッチ信号を所定段階下げておくことができる。そのため、補機負荷の切り替わり時におけるエンジン出力の応答遅れに起因して加速力が急増或いは急減するのを抑えることができる。
【0116】
また、補機負荷の検出は、電源装置15からの負荷電力信号に基づく方法以外に、例えば、各電気負荷からそれぞれ消費電力を示す信号入力されてそれに基づいて検出する方法としてもよい。また、発電機12の発電電力を示す信号を送るようにしてもよい。また、発電機12の発電電力或いは電源装置15の出力を並列分岐してエンジン制御部21にも引き込み、シャント抵抗などを用いて消費電力を検出するようにしてもよい。
【0117】
また、上記実施形態では、電気負荷の消費電力を検出することによってこれらに用いられる補機駆動力を検出するようにしたが、補機駆動力をどのように検出するかについても種々考えられる。電気負荷以外の補機についても、そこで使われている駆動力を何らかの方法で直接又は間接的に検出できるならば、それも反映したより高精度の補正を行うことができる。
【0118】
また、本発明の適用は、エンジン2としてディーゼルエンジンを搭載した気動車に限定されるものではない。
【符号の説明】
【0119】
1…気動車、2…エンジン、3…変速機、4…推進軸、5,6…台車、5a,5b,6a,6b…空気バネ、7…終減速機、11…補機駆動軸、12…発電機、13…ラジエター、15…電源装置、16…コンプレッサ、17…空調装置、20…マスコン、21…エンジン制御部、22…基準ノッチ信号生成部、23…第1補正演算部、24…補機負荷補正値演算部、25…第2補正演算部、26…車両重量補正値演算部、30…応荷重センサ
【特許請求の範囲】
【請求項1】
エンジンを走行用駆動源として有すると共に、該エンジンを駆動源として動作する少なくとも1つの車載機器を有する気動車において、該エンジンを制御する気動車用エンジン制御装置であって、
前記エンジンは、異なる所定数の制御指令信号の何れかが入力され、前記制御指令信号毎に所定の目標加速力を発生させるために段階的に設定された基準エンジン出力のうち入力された前記制御指令信号に対応した基準エンジン出力を発生するよう構成され、
前記各基準エンジン出力は、前記気動車において、少なくとも前記車載機器の動作状態を含む、該気動車の加速力に影響する加速力関連状態が、所定の基準状態である場合に、対応する前記目標加速力が得られるよう設定されており、
当該気動車用エンジン制御装置は、
前記エンジンへ前記各制御指令信号の何れかを選択的に出力するために操作され、該各制御指令信号に対応した前記所定数の操作指令信号のうち前記操作により選択された何れかの操作指令信号を出力する操作指令手段と、
前記操作指令信号毎に、対応する前記制御指令信号が基準指令信号として予め設定されていると共に、前記操作指令手段から入力された前記操作指令信号に対応した前記基準指令信号を前記制御指令信号として前記エンジンへ出力する制御指令信号生成手段と、
前記車載機器のうち少なくとも1つを検出対象機器として、前記エンジンから出力される前記基準エンジン出力のうち該検出対象機器の駆動源として用いられている分である機器駆動力を直接又は間接的に検出する機器駆動力検出手段と、
を備え、
前記加速力関連状態として少なくとも前記機器駆動力が含まれ、該機器駆動力に対する前記基準状態とは、該機器駆動力が所定の機器駆動力基準レベルである状態であり、
前記制御指令信号生成手段は、前記操作指令手段から前記操作指令信号が入力された場合、前記機器駆動力検出手段により検出された前記機器駆動力と前記機器駆動力基準レベルとの差異に基づき、該操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として前記エンジンへ出力した場合に該基準指令信号に対応した前記目標加速力を含む所定範囲内の加速力が得られるか否か判断し、得られない場合は、該所定範囲内の加速力を得ることが可能な前記基準指令信号を選択して、その選択した基準指令信号を前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項2】
請求項1に記載の気動車用エンジン制御装置であって、
前記気動車は、前記機器駆動力を電気エネルギーに変換する発電手段を備え、
前記検出対象機器は、前記発電手段から供給される電力により駆動する電気負荷として構成されており、
前記機器駆動力検出手段は、前記機器駆動力として、前記検出対象機器で消費されている電力を検出する
ことを特徴とする気動車用エンジン制御装置。
【請求項3】
請求項1又は請求項2に記載の気動車用エンジン制御装置であって、
前記機器駆動力以外の前記加速力関連状態はいずれも前記基準状態であるものとの仮定のもと、前記機器駆動力検出手段により検出された前記機器駆動力と前記機器駆動力基準レベルとの差異に基づいて、前記操作指令手段からの操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として出力した場合に該基準指令信号に対応した前記所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま前記制御指令信号として出力してもよい旨を、得られないならば該所定範囲内の加速力を得るためには該基準指令信号に対応した前記基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第1増減情報を出力する第1増減情報生成手段を備え、
前記制御指令信号生成手段は、前記操作指令手段からの操作指令信号に対応した前記基準指令信号を、前記第1増減情報生成手段からの前記第1増減情報に従って、そのまま、若しくは前記増減後の基準エンジン出力に対応した前記基準指令信号を、前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の気動車用エンジン制御装置であって、
前記気動車の重量を直接又は間接的に検出する重量検出手段を備え、
前記加速力関連状態として少なくとも前記重量が含まれると共に、該重量に対する前記基準状態とは、該重量が所定の重量基準レベルである状態であり、
前記制御指令信号生成手段は、前記操作指令手段から前記操作指令信号が入力された場合、前記機器駆動力検出手段により検出された前記機器駆動力と前記機器駆動力基準レベルとの差異、及び前記重量検出手段により検出された前記重量と前記重量基準レベルとの差異に基づき、該操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として前記エンジンへ出力した場合に該基準指令信号に対応した前記所定範囲内の加速力が得られるか否か判断し、得られない場合は、該所定範囲内の加速力を得ることが可能な前記基準指令信号を選択して、その選択した基準指令信号を前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項5】
請求項3に記載の気動車用エンジン制御装置であって、
前記気動車の重量を直接又は間接的に検出する重量検出手段を備え、
前記加速力関連状態として少なくとも前記重量が含まれると共に、該重量に対する前記基準状態とは、該重量が所定の重量基準レベルである状態であり、
前記重量以外の前記加速力関連状態はいずれも前記基準状態であるものとの仮定のもと、前記重量検出手段により検出された前記重量と前記重量基準レベルとの差異に基づいて、前記操作指令手段からの操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として出力した場合に該基準指令信号に対応した前記所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま前記制御指令信号として出力してもよい旨を、得られないならば該所定範囲内の加速力を得るためには該基準指令信号に対応した前記基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第2増減情報を出力する第2増減情報生成手段を備え、
前記制御指令信号生成手段は、前記操作指令手段からの操作指令信号に対応した前記基準指令信号を、前記第1増減情報生成手段からの前記第1増減情報及び前記第2増減情報生成手段からの前記第2増減情報に従って、そのまま、若しくは前記各増減後の基準エンジン出力に対応した前記基準指令信号を、前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項1】
エンジンを走行用駆動源として有すると共に、該エンジンを駆動源として動作する少なくとも1つの車載機器を有する気動車において、該エンジンを制御する気動車用エンジン制御装置であって、
前記エンジンは、異なる所定数の制御指令信号の何れかが入力され、前記制御指令信号毎に所定の目標加速力を発生させるために段階的に設定された基準エンジン出力のうち入力された前記制御指令信号に対応した基準エンジン出力を発生するよう構成され、
前記各基準エンジン出力は、前記気動車において、少なくとも前記車載機器の動作状態を含む、該気動車の加速力に影響する加速力関連状態が、所定の基準状態である場合に、対応する前記目標加速力が得られるよう設定されており、
当該気動車用エンジン制御装置は、
前記エンジンへ前記各制御指令信号の何れかを選択的に出力するために操作され、該各制御指令信号に対応した前記所定数の操作指令信号のうち前記操作により選択された何れかの操作指令信号を出力する操作指令手段と、
前記操作指令信号毎に、対応する前記制御指令信号が基準指令信号として予め設定されていると共に、前記操作指令手段から入力された前記操作指令信号に対応した前記基準指令信号を前記制御指令信号として前記エンジンへ出力する制御指令信号生成手段と、
前記車載機器のうち少なくとも1つを検出対象機器として、前記エンジンから出力される前記基準エンジン出力のうち該検出対象機器の駆動源として用いられている分である機器駆動力を直接又は間接的に検出する機器駆動力検出手段と、
を備え、
前記加速力関連状態として少なくとも前記機器駆動力が含まれ、該機器駆動力に対する前記基準状態とは、該機器駆動力が所定の機器駆動力基準レベルである状態であり、
前記制御指令信号生成手段は、前記操作指令手段から前記操作指令信号が入力された場合、前記機器駆動力検出手段により検出された前記機器駆動力と前記機器駆動力基準レベルとの差異に基づき、該操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として前記エンジンへ出力した場合に該基準指令信号に対応した前記目標加速力を含む所定範囲内の加速力が得られるか否か判断し、得られない場合は、該所定範囲内の加速力を得ることが可能な前記基準指令信号を選択して、その選択した基準指令信号を前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項2】
請求項1に記載の気動車用エンジン制御装置であって、
前記気動車は、前記機器駆動力を電気エネルギーに変換する発電手段を備え、
前記検出対象機器は、前記発電手段から供給される電力により駆動する電気負荷として構成されており、
前記機器駆動力検出手段は、前記機器駆動力として、前記検出対象機器で消費されている電力を検出する
ことを特徴とする気動車用エンジン制御装置。
【請求項3】
請求項1又は請求項2に記載の気動車用エンジン制御装置であって、
前記機器駆動力以外の前記加速力関連状態はいずれも前記基準状態であるものとの仮定のもと、前記機器駆動力検出手段により検出された前記機器駆動力と前記機器駆動力基準レベルとの差異に基づいて、前記操作指令手段からの操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として出力した場合に該基準指令信号に対応した前記所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま前記制御指令信号として出力してもよい旨を、得られないならば該所定範囲内の加速力を得るためには該基準指令信号に対応した前記基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第1増減情報を出力する第1増減情報生成手段を備え、
前記制御指令信号生成手段は、前記操作指令手段からの操作指令信号に対応した前記基準指令信号を、前記第1増減情報生成手段からの前記第1増減情報に従って、そのまま、若しくは前記増減後の基準エンジン出力に対応した前記基準指令信号を、前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の気動車用エンジン制御装置であって、
前記気動車の重量を直接又は間接的に検出する重量検出手段を備え、
前記加速力関連状態として少なくとも前記重量が含まれると共に、該重量に対する前記基準状態とは、該重量が所定の重量基準レベルである状態であり、
前記制御指令信号生成手段は、前記操作指令手段から前記操作指令信号が入力された場合、前記機器駆動力検出手段により検出された前記機器駆動力と前記機器駆動力基準レベルとの差異、及び前記重量検出手段により検出された前記重量と前記重量基準レベルとの差異に基づき、該操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として前記エンジンへ出力した場合に該基準指令信号に対応した前記所定範囲内の加速力が得られるか否か判断し、得られない場合は、該所定範囲内の加速力を得ることが可能な前記基準指令信号を選択して、その選択した基準指令信号を前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【請求項5】
請求項3に記載の気動車用エンジン制御装置であって、
前記気動車の重量を直接又は間接的に検出する重量検出手段を備え、
前記加速力関連状態として少なくとも前記重量が含まれると共に、該重量に対する前記基準状態とは、該重量が所定の重量基準レベルである状態であり、
前記重量以外の前記加速力関連状態はいずれも前記基準状態であるものとの仮定のもと、前記重量検出手段により検出された前記重量と前記重量基準レベルとの差異に基づいて、前記操作指令手段からの操作指令信号に対応した前記基準指令信号をそのまま前記制御指令信号として出力した場合に該基準指令信号に対応した前記所定範囲内の加速力が得られるか否か判断し、得られるならばそのまま前記制御指令信号として出力してもよい旨を、得られないならば該所定範囲内の加速力を得るためには該基準指令信号に対応した前記基準エンジン出力を何段階増減させる必要があるかを、それぞれ示す第2増減情報を出力する第2増減情報生成手段を備え、
前記制御指令信号生成手段は、前記操作指令手段からの操作指令信号に対応した前記基準指令信号を、前記第1増減情報生成手段からの前記第1増減情報及び前記第2増減情報生成手段からの前記第2増減情報に従って、そのまま、若しくは前記各増減後の基準エンジン出力に対応した前記基準指令信号を、前記制御指令信号として前記エンジンへ出力する
ことを特徴とする気動車用エンジン制御装置。
【図4】


【図5】
【図1】
【図2】
【図3】
【図5】
【図1】
【図2】
【図3】
【公開番号】特開2012−188091(P2012−188091A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−55731(P2011−55731)
【出願日】平成23年3月14日(2011.3.14)
【出願人】(390021577)東海旅客鉄道株式会社 (413)
【出願人】(303025663)株式会社日立ニコトランスミッション (25)
【出願人】(000004617)日本車輌製造株式会社 (722)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月14日(2011.3.14)
【出願人】(390021577)東海旅客鉄道株式会社 (413)
【出願人】(303025663)株式会社日立ニコトランスミッション (25)
【出願人】(000004617)日本車輌製造株式会社 (722)
【Fターム(参考)】
[ Back to top ]