
気泡検出装置

【課題】チューブ体に収容された液体が散乱体を含有する液体であっても、確実に気泡を検出でき得る気泡検出装置を提供する。
【解決手段】透光性材料からなるノズルチップ100に収容された液体中の気泡を検出する気泡検出装置は、水の吸光ピーク波長と同じ波長の光をノズルチップ100に向かって照射する発光部20と、ノズルチップ100を挟んで前記発光部20と反対側に設置され、前記ノズルチップ100を通過した光の光量を検出する受光部22と、前記ノズルチップ100を軸方向に相対移動させるZ駆動部14と、Z駆動部14の駆動を制御するとともに、前記ノズルチップ100の軸方向への相対移動に伴う透過光量の変化に基づいて気泡の有無を判断するコントロール部16と、を備える。
【解決手段】透光性材料からなるノズルチップ100に収容された液体中の気泡を検出する気泡検出装置は、水の吸光ピーク波長と同じ波長の光をノズルチップ100に向かって照射する発光部20と、ノズルチップ100を挟んで前記発光部20と反対側に設置され、前記ノズルチップ100を通過した光の光量を検出する受光部22と、前記ノズルチップ100を軸方向に相対移動させるZ駆動部14と、Z駆動部14の駆動を制御するとともに、前記ノズルチップ100の軸方向への相対移動に伴う透過光量の変化に基づいて気泡の有無を判断するコントロール部16と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ノズルチップ等の透光性材料からなるチューブ体に収容された液体中の気泡を検出する気泡検出装置に関する。
【背景技術】
【0002】
従来から、チューブ体に収容された液体中の気泡を検出する気泡検出装置が広く知られている。かかる気泡検出装置は、例えば、ノズルチップを介して液体を吸引吐出する分注装置などに組み込まれており、チューブ体であるノズルチップに吸引された液体中の気泡を検出する。気泡検出装置により、気泡を検出することにより、吐出量の誤差などを低減することができる。
【0003】
従来の気泡検出装置の多くは、チューブ体に、700nm〜1000nmの波長を有する近赤外光を照射し、そのとき得られる透過光量に基づいて、気泡を検出していた。例えば、特許文献1に開示の気泡検出装置では、容器を一方向に定速度で移動させつつ、700nm〜1000nmの波長を有する近赤外光を容器に照射し、移動に伴い透過光量が急減した箇所を、気泡箇所として検出していた。気泡箇所で透過光量が急減するのは、液体が存在しない箇所(気泡)では、液体が存在する箇所に比して、光の散乱が増えるからである。かかる特許文献1の技術によれば、気泡をある程度は検出できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第2548383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、チューブ体に収容される液体の中には、散乱を生じさせやすい物質、いわゆる散乱体を含むものもある。例えば、血液には、乳びといった散乱を生じさせやすい散乱体が含まれている。こうした乳び(散乱体)が含まれていると、液体が存在する箇所でも散乱が生じ、透過光量が減少する。そして、結果として、液体が存在する箇所と気泡箇所とで、透過光量の差が小さくなり、気泡を正確に検出できない場合などがあった。
【0006】
そこで、本発明では、チューブ体に収容された液体が散乱体を含有する液体であっても、確実に気泡を検出でき得る気泡検出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の気泡検出装置は、透光性材料からなるチューブ体に収容された液体中の気泡を検出する気泡検出装置であって、水の吸光ピーク波長と同じ波長の光を、前記チューブ体に向かって照射する光源と、前記チューブ体を挟んで前記光源と反対側に設置され、前記チューブ体を通過した光の光量を検出する受光手段と、前記チューブ体を、前記光源および前記受光手段に対して、軸方向に相対移動させる移動手段と、前記移動手段の駆動を制御するとともに、前記チューブ体の軸方向への相対移動に伴う前記受光手段で検出される透過光量の変化に基づいて気泡の有無を判断する制御手段と、を備える。
【0008】
好適な態様では、さらに、液体が収容されていない空のチューブ体を軸方向に相対移動させつつ光照射した際に得られる透過光量の変化を記憶する記憶手段を備え、前記制御手段は、前記空のチューブ体で得られる透過光量と、前記液体を収容したチューブ体で得られる透過光量と、の差分値に基づいて気泡の有無を判断する。他の好適な態様では、さらに、前記チューブ体を透過した光のうち特定高さの透過光のみを前記受光手段に導く絞り板を備える。
【発明の効果】
【0009】
本発明によれば、水の吸光ピーク波長と同じ波長の光を用いているため、散乱体の含有量に関わらず、液体が存在する箇所では水による吸光が生じるため、透過光量に基づいて、液体の有無、ひいては、気泡の有無を確実に、検出できる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態である分注装置の概略構成図である。
【図2】分注装置に組み込まれた気泡検出装置の要部概略図である。
【図3】本実施形態での気泡検出の原理を示す図である。
【図4】水に対する光の透過率を示すグラフである。
【図5】従来技術での気泡検出の原理を示す図である。
【発明を実施するための形態】
【0011】
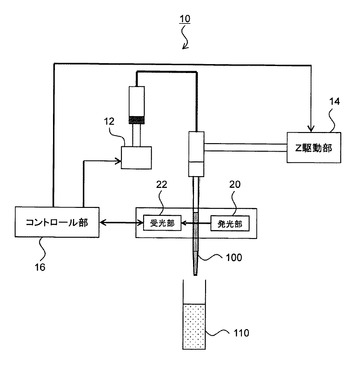
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である分注装置10の概略構成図である。また、図2は、分注装置10に組み込まれた気泡検出装置の要部構成図である。
【0012】
この分注装置10は、検体容器110に貯留された液体検体、具体的には血液を、ノズルチップ100で吸引し、分注容器(図示せず)に小分け分注していく装置である。分注装置10には、ノズルチップ100に液体検体の吸引吐出を行なわせるポンプ12や、ノズルチップ100を水平移動させる水平駆動部(図示せず)、ノズルチップ100を昇降させるZ駆動部14、および、これらを制御するコントロール部16を備えている。また、本実施形態の分注装置10には、気泡検出装置も組み込まれている。
【0013】
気泡検出装置は、ノズルチップ100に吸引された血液内における気泡を検出する装置である。この気泡検出装置は、発光部20、受光部22、絞り板24に加え、分注装置10の構成要素の一つであるZ駆動部14およびコントロール部16などを備えている。この気泡検出装置では、ノズルチップ100を軸方向(Z方向)に移動させつつ、液体検体を収容したノズルチップ100に対して光の照射と、ノズルチップ100を透過した透過光の光量検出を行う。そして、ノズルチップ100の移動に伴う透過光量の変化に基づいて気泡の検出を行う。なお、透過光量に基づいて気泡検出を行う関係上、本実施形態で用いるノズルチップ100は、透光性を備えたものとなっている。
【0014】
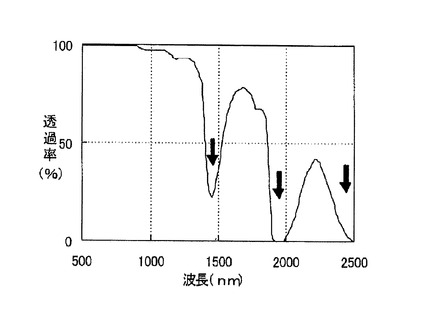
発光部20は、液体検体が収容されているノズルチップ100に対して1450nmの波長の赤外光を照射するもので、例えば、LEDや、レーザダイオードなどで構成される。本実施形態において、照射光を1450nmとするのは、当該波長が、水の吸光ピークだからである。すなわち、水は、1450nm、1940nm、2500nm近傍において、吸光ピークが生じることが知られている。図4は、水に対する光の透過率と波長との関係を示す図である。図4から明らかなとおり、波長1450nm、1940nm、2500nmは、水を透過する光の率(透過率)が急激に低下する吸光ピークである。本実施形態では、この水の吸光ピークの一つである1450nmの波長の光を照射するようにしている。かかる水の吸光ピークの波長の光を照射する理由については後に詳説する。なお、当然ながら、水の吸光ピークを含むのであれば、1450nm以外の波長の光、例えば、1940nmの波長の光、2500nmの波長の光を照射するようにしてもよい。
【0015】
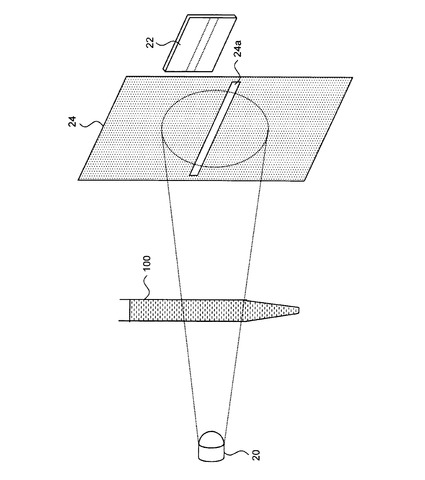
受光部22は、ノズルチップ100を挟んで、発光部20の反対側に設置されている。この受光部22は、ノズルチップ100を透過した透過光の光量を検出するもので、フォトディテクターなどから構成される。受光部22は、受光した光の光量に応じた電気信号をコントロール部16に出力する。本実施形態では、特定高さの透過光のみを受光するために、受光部22とノズルチップ100との間に、絞り板24を配置している。絞り板24は、水平方向に延びるスリット24aが形成された遮光板であり、当該スリット24aを通過した光のみを受光部22に導くようになっている。かかる絞り板24を設けることにより、受光部22には、特定の高さを透過した光のみが受光されることになる。
【0016】
なお、絞り板24を設ける代わりに、ノズルチップ100に照射する光を、少なくとも高さ方向の幅が絞られた平行光としてもよい。したがって、例えば、絞り板24を設ける代わりに、発光部20(光源)とノズルチップ100との間に、円柱レンズ等を配置して、発光部20から出力される光を、一定幅、一定厚さのビーム光に変換してもよい。
【0017】
また、本実施形態では設けていないが、受光部22の前面に、対象波長である1450nmの光のみを透過させる光学フィルタを設けてもよい。かかる光学フィルタを設けることにより、環境光の影響を低減することができ、ノズルチップ100を透過した透過光量をより正確に検出することができる。
【0018】
Z駆動部14は、ノズルチップ100を昇降させる機構部で、駆動源であるモータや、モータの動力を直線運動に変換してノズルチップ100に伝達するリードスクリューやタイミングベルトといった伝達機構などから構成される。コントロール部16は、分注処理の進捗に応じて、適宜、このZ駆動部14を駆動して、ノズルチップ100を昇降させる。また、このZ駆動部14は、ノズルチップ100を発光部20に対して軸方向に相対移動させる気泡検出装置の移動手段としても機能している。気泡検出する際、コントロール部16は、このZ駆動部14を駆動して、ノズルチップ100を、発光部20に対して軸方向に相対移動させる。なお、本実施形態では、部品の共用化などの観点から、分注装置10で用いられるZ駆動部14を、気泡検出装置の移動手段として用いたが、ノズルチップ100を発光部20に対して軸方向に相対移動できるのであれば、分注装置10のZ駆動部14とは別にノズルチップ100の移動機構を設けてもよい。また、ノズルチップ100ではなく、発光部20および受光部22をZ方向に移動させる移動機構を設けてもよい。
【0019】
コントロール部16は、分注装置10および当該分注装置10に組み込まれた気泡検出装置の駆動を制御する部位で、各種演算を行なうCPUや、各種データを記憶するメモリなどを備えている。このコントロール部16は、分注処理の進捗に応じて、ポンプ12や、Z駆動部14などを駆動制御する。また、気泡検出が必要な場合には、Z駆動部14や発光部20を駆動するとともに、受光部22で検出された光量に基づいて、気泡を検出する。また、コントロール部16は、受光部22で検出された光量を他の分析用途(例えばノズルチップ100における検体の液量検出等)に用いるようにしてもよい。すなわち、コントロール部16は、検出された光量のデータを用いて複数種の検体分析処理に応じた駆動制御を可能とし、分析処理の一つとして本発明の気泡検出処理が選択されるようにしてもよい。
【0020】
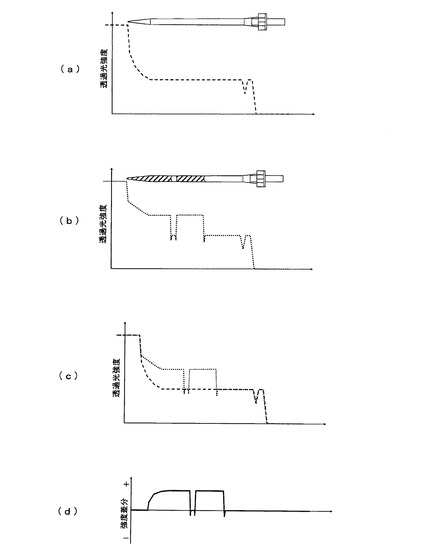
次に、気泡検出装置での気泡検出の原理について、従来技術と比較して説明する。はじめに、従来の気泡検出技術について、図5を参照して簡単に説明する。図5は、従来技術での気泡検出の原理を説明する図である。
【0021】
従来でも、ノズルチップ100に光を照射し、そのとき得られる透過光量に基づいて気泡を検出する技術があった。ただし、従来技術は、照射光として、水の吸光ピークの波長の光ではなく、700nm〜1000nmの波長の光を用いる点で本実施形態と大きく異なっている。かかる波長の光を用いていた従来技術では、ノズルチップ100内に液体がある場合には、ノズルチップ100が空の場合に比して光の散乱量が減少し、ひいては、透過光量が増加することを利用して、気泡を検出していた。
【0022】
具体的に、従来技術での気泡検出の流れについて説明する。従来技術において気泡を検出する場合には、予め空のノズルチップ100に赤外光(700nm〜1000nm)を照射し、そのとき、得られる透過光量の変化波形を、基準波形として取得する。図5(a)は、この基準波形の一例を示す図である。続いて、検出対象である液体検体を収容したノズルチップ100にも赤外光(700nm〜1000nm)を照射し、そのとき、得られる透過光量の変化波形を、検出波形として取得する。図5(b)は、この従来技術における検出波形の一例を示す図であり、図5(c)は、基準波形と検出波形を重ね合わせた図である。ここで、図5(c)から明らかなとおり、波長700nm〜1000nmの赤外光を照射した場合、空のノズルチップ100の透過光量よりも、液体を収容したノズルチップ100の透過光量のほうが大きい。これは、液体が存在する場合は、液体が存在しない場合に比して、散乱が少なくなるためである。
【0023】
ただし、液体を収容したノズルチップ100のうち、気泡により空気層が生じている箇所では、液体が存在しないため、空のノズルチップ100の場合と同程度の散乱が生じることになる。そのため、気泡箇所では、透過光量が、急激に落ち込む。従来技術では、この検出波形の急激な落ち込み箇所を気泡箇所として検出する。
【0024】
ただし、検出波形単独では、この落ち込み箇所を自動的に特定することが困難であるため、通常、基準波形と検出波形との差分を取得し、その差分値に基づいて気泡を検出する。図5(d)は、基準波形と検出波形との差分値の波形を示す図である。図5(d)から明らかなとおり、気泡検出箇所では、差分値がほぼゼロとなる。従来技術では、この差分値がほぼゼロとなる箇所を気泡箇所として検出していた。
【0025】
なお、従来技術において、照射光を700nm以上としたのは、検出対象である液体検体(血液)に含まれる各種成分の吸光ピークを避けるためである。すなわち、検出対象である血液には、通常、溶血やビリルビンといった成分が含まれている。このうち溶血は、430nm、520nm、575nm近傍で吸光ピークを取ることが知られている。また、ビリルビンは500nm近傍で吸光ピークを取ることが知られている。従来技術では、こうした含有成分の吸光ピークを範囲に含まないように、照射光の波長を700nm以上としている。また、受光部22において検出でき得る波長範囲の限界から、照射光の波長の最大値を1000nmとしていた。
【0026】
しかし、従来技術は、含有成分による吸光の影響は考慮しているものの、含有成分による散乱の影響は考慮されていなかった。そのため、液体検体に、光を散乱させる散乱体が含有されている場合には、その含有量によっては、気泡を正確に検出できない場合があった。
【0027】
例えば、血液には、乳びと呼ばれる散乱体が含まれている。かかる乳びの含有量が多いと、液体(血液)が存在する箇所でも、照射光の大部分が散乱し、透過光量が小さくなる。結果として、気泡箇所と液体が存在する箇所とでの透過光量の差が小さくなり、気泡があっても、透過光量の急激な落ち込みが発生しない場合がある。かかる場合には、気泡を正確に検出することができない。
【0028】
本実施形態では、こうした問題を解決するために、水の吸光ピークである1450nmの波長の光を照射している。かかる波長の光を液体に照射すると、その大部分は、液体(水)に吸収されてしまうため、透過光量は非常に少なくなる。一方、照射箇所に液体が存在しない場合は、水による吸光が生じないため、透過光量は大きくなる。本実施形態では、この液体の有無による透過光量の違い(吸光量の違い)を利用して、気泡を検出している。具体的に、本実施形態での気泡検出の流れと気泡検出できる原理について図3を参照して説明する。
【0029】
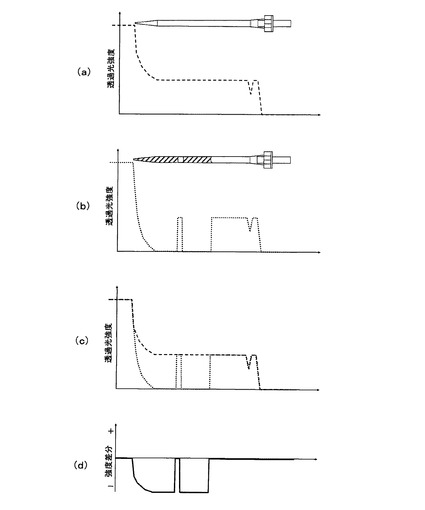
本実施形態でも、従来技術と同様、予め、液体検体が収容されていない空のノズルチップ100を軸方向に移動させつつ、赤外光を照射し、その際得られた透過光量の変化波形を基準波形としてメモリに記憶しておく。図3(a)は、基準波形の一例を示す図である。
【0030】
気泡を検出する場合は、検出対象となる液体検体を収容したノズルチップ100を軸方向に移動させつつ、赤外光を照射し、その際得られた透過光量の変化波形を検出波形として取得する。図3(b)は、この検出波形の一例を示す図であり、図3(c)は、基準波形と検出波形を重ねた図である。コントロール部16は、この検出波形と基準波形との差分を取り、この差分値の変化波形に基づいて気泡を検出する。図3(d)は、この差分値の変化波形の一例を示す図である。
【0031】
こうした手順で気泡が検出できるのは次の理由による。空のノズルチップ100に赤外光(波長1450nm)を照射した場合、一部は、ノズルチップ100により吸収・散乱されるものの、残りの大部分は、ノズルチップ100を透過する。この透過光量は、図3(a)に示すように、ノズルチップ100の径が太くなるにつれて小さくなり、ノズルチップ100の径が一定になれば一定になる。
【0032】
一方、液体検体を収容したノズルチップ100に赤外光(波長1450nm)を照射した場合、ノズルチップ100による吸収・散乱に加えて、液体検体に含有される水による吸光が生じる。すなわち、本実施形態では、水が吸収しやすい波長である1450nmの光を用いている。かかる波長の光を、水を含んだ液体検体に照射した場合、その多くが、水で吸収されることになる。結果として、図3(b)、図3(c)に示すとおり、空のノズルチップ100に照射した場合に比して、透過光量が大幅に減少する。
【0033】
ただし、液体検体のうち、気泡が生じて、空気の層のようになっている部分については、水による吸光は生じないため、透過光量は、空のノズルチップ100に照射した際に得られる透過光量と、ほぼ同じになる。その結果、図3(b)、図3(c)に示すように、気泡箇所においては、透過光量が、急激に増加する(空のノズルチップ100の透過光量とほぼ同じ値になる)。そして、基準波形と検出波形との差分値の波形(図3(d)の波形)に着目すると、気泡箇所では、基準波形および検出波形の差分値がほぼ0になる。本実施形態では、この差分値が、ほぼ0になる箇所を、気泡箇所として検出する。
【0034】
なお、検出波形ではなく、基準波形と検出波形との差分波形に基づいて気泡検出を行うのは、ノズルチップ100による吸光や散乱の影響を除去するためである。すなわち、液体検体が収容されていない場合(図3(a)の場合)、収容されている場合(図3(b)の場合)のいずれにおいても、ノズルチップ100による吸光や散乱が生じている。基準波形と検出波形との差分を取ることにより、このノズルチップ100による吸光や散乱の影響を除去でき、液体が存在しない箇所での差分値を、ほぼ0にすることができる。その結果、テーパ部のように、気泡の有無に関係なく、透過光量が変化する部分でも、気泡箇所を容易に特定することができる。
【0035】
ここで、一般に、液体検体における水分量は、散乱体(乳び)よりも遥かに多く、液体検体に含まれる水で吸収される光量は、液体検体に含まれる散乱体で散乱される光量よりも十分に大きい。したがって、検体ごとの散乱体の含有量のバラツキに起因して透過光量がバラついたとしても、液体の存在する箇所では、液体の存在しない箇所よりも透過光量は、十分に小さくなる。そのため、検体に含まれる散乱体の量に関わらず、常に、気泡を確実に検出することができる。つまり、本実施形態によれば、液体検体に散乱体が含まれていても、確実に気泡を検出することができる。
【0036】
なお、本実施形態では、液体検体として血液を例示したが、散乱体を含有する可能性のある液体検体であれば、他の検体、例えば、尿などであってもよい。
【符号の説明】
【0037】
10 分注装置、12 ポンプ、14 Z駆動部、16 コントロール部、20 発光部、22 受光部、24 絞り板、100 ノズルチップ、110 検体容器。
【技術分野】
【0001】
本発明は、ノズルチップ等の透光性材料からなるチューブ体に収容された液体中の気泡を検出する気泡検出装置に関する。
【背景技術】
【0002】
従来から、チューブ体に収容された液体中の気泡を検出する気泡検出装置が広く知られている。かかる気泡検出装置は、例えば、ノズルチップを介して液体を吸引吐出する分注装置などに組み込まれており、チューブ体であるノズルチップに吸引された液体中の気泡を検出する。気泡検出装置により、気泡を検出することにより、吐出量の誤差などを低減することができる。
【0003】
従来の気泡検出装置の多くは、チューブ体に、700nm〜1000nmの波長を有する近赤外光を照射し、そのとき得られる透過光量に基づいて、気泡を検出していた。例えば、特許文献1に開示の気泡検出装置では、容器を一方向に定速度で移動させつつ、700nm〜1000nmの波長を有する近赤外光を容器に照射し、移動に伴い透過光量が急減した箇所を、気泡箇所として検出していた。気泡箇所で透過光量が急減するのは、液体が存在しない箇所(気泡)では、液体が存在する箇所に比して、光の散乱が増えるからである。かかる特許文献1の技術によれば、気泡をある程度は検出できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第2548383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、チューブ体に収容される液体の中には、散乱を生じさせやすい物質、いわゆる散乱体を含むものもある。例えば、血液には、乳びといった散乱を生じさせやすい散乱体が含まれている。こうした乳び(散乱体)が含まれていると、液体が存在する箇所でも散乱が生じ、透過光量が減少する。そして、結果として、液体が存在する箇所と気泡箇所とで、透過光量の差が小さくなり、気泡を正確に検出できない場合などがあった。
【0006】
そこで、本発明では、チューブ体に収容された液体が散乱体を含有する液体であっても、確実に気泡を検出でき得る気泡検出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の気泡検出装置は、透光性材料からなるチューブ体に収容された液体中の気泡を検出する気泡検出装置であって、水の吸光ピーク波長と同じ波長の光を、前記チューブ体に向かって照射する光源と、前記チューブ体を挟んで前記光源と反対側に設置され、前記チューブ体を通過した光の光量を検出する受光手段と、前記チューブ体を、前記光源および前記受光手段に対して、軸方向に相対移動させる移動手段と、前記移動手段の駆動を制御するとともに、前記チューブ体の軸方向への相対移動に伴う前記受光手段で検出される透過光量の変化に基づいて気泡の有無を判断する制御手段と、を備える。
【0008】
好適な態様では、さらに、液体が収容されていない空のチューブ体を軸方向に相対移動させつつ光照射した際に得られる透過光量の変化を記憶する記憶手段を備え、前記制御手段は、前記空のチューブ体で得られる透過光量と、前記液体を収容したチューブ体で得られる透過光量と、の差分値に基づいて気泡の有無を判断する。他の好適な態様では、さらに、前記チューブ体を透過した光のうち特定高さの透過光のみを前記受光手段に導く絞り板を備える。
【発明の効果】
【0009】
本発明によれば、水の吸光ピーク波長と同じ波長の光を用いているため、散乱体の含有量に関わらず、液体が存在する箇所では水による吸光が生じるため、透過光量に基づいて、液体の有無、ひいては、気泡の有無を確実に、検出できる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態である分注装置の概略構成図である。
【図2】分注装置に組み込まれた気泡検出装置の要部概略図である。
【図3】本実施形態での気泡検出の原理を示す図である。
【図4】水に対する光の透過率を示すグラフである。
【図5】従来技術での気泡検出の原理を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である分注装置10の概略構成図である。また、図2は、分注装置10に組み込まれた気泡検出装置の要部構成図である。
【0012】
この分注装置10は、検体容器110に貯留された液体検体、具体的には血液を、ノズルチップ100で吸引し、分注容器(図示せず)に小分け分注していく装置である。分注装置10には、ノズルチップ100に液体検体の吸引吐出を行なわせるポンプ12や、ノズルチップ100を水平移動させる水平駆動部(図示せず)、ノズルチップ100を昇降させるZ駆動部14、および、これらを制御するコントロール部16を備えている。また、本実施形態の分注装置10には、気泡検出装置も組み込まれている。
【0013】
気泡検出装置は、ノズルチップ100に吸引された血液内における気泡を検出する装置である。この気泡検出装置は、発光部20、受光部22、絞り板24に加え、分注装置10の構成要素の一つであるZ駆動部14およびコントロール部16などを備えている。この気泡検出装置では、ノズルチップ100を軸方向(Z方向)に移動させつつ、液体検体を収容したノズルチップ100に対して光の照射と、ノズルチップ100を透過した透過光の光量検出を行う。そして、ノズルチップ100の移動に伴う透過光量の変化に基づいて気泡の検出を行う。なお、透過光量に基づいて気泡検出を行う関係上、本実施形態で用いるノズルチップ100は、透光性を備えたものとなっている。
【0014】
発光部20は、液体検体が収容されているノズルチップ100に対して1450nmの波長の赤外光を照射するもので、例えば、LEDや、レーザダイオードなどで構成される。本実施形態において、照射光を1450nmとするのは、当該波長が、水の吸光ピークだからである。すなわち、水は、1450nm、1940nm、2500nm近傍において、吸光ピークが生じることが知られている。図4は、水に対する光の透過率と波長との関係を示す図である。図4から明らかなとおり、波長1450nm、1940nm、2500nmは、水を透過する光の率(透過率)が急激に低下する吸光ピークである。本実施形態では、この水の吸光ピークの一つである1450nmの波長の光を照射するようにしている。かかる水の吸光ピークの波長の光を照射する理由については後に詳説する。なお、当然ながら、水の吸光ピークを含むのであれば、1450nm以外の波長の光、例えば、1940nmの波長の光、2500nmの波長の光を照射するようにしてもよい。
【0015】
受光部22は、ノズルチップ100を挟んで、発光部20の反対側に設置されている。この受光部22は、ノズルチップ100を透過した透過光の光量を検出するもので、フォトディテクターなどから構成される。受光部22は、受光した光の光量に応じた電気信号をコントロール部16に出力する。本実施形態では、特定高さの透過光のみを受光するために、受光部22とノズルチップ100との間に、絞り板24を配置している。絞り板24は、水平方向に延びるスリット24aが形成された遮光板であり、当該スリット24aを通過した光のみを受光部22に導くようになっている。かかる絞り板24を設けることにより、受光部22には、特定の高さを透過した光のみが受光されることになる。
【0016】
なお、絞り板24を設ける代わりに、ノズルチップ100に照射する光を、少なくとも高さ方向の幅が絞られた平行光としてもよい。したがって、例えば、絞り板24を設ける代わりに、発光部20(光源)とノズルチップ100との間に、円柱レンズ等を配置して、発光部20から出力される光を、一定幅、一定厚さのビーム光に変換してもよい。
【0017】
また、本実施形態では設けていないが、受光部22の前面に、対象波長である1450nmの光のみを透過させる光学フィルタを設けてもよい。かかる光学フィルタを設けることにより、環境光の影響を低減することができ、ノズルチップ100を透過した透過光量をより正確に検出することができる。
【0018】
Z駆動部14は、ノズルチップ100を昇降させる機構部で、駆動源であるモータや、モータの動力を直線運動に変換してノズルチップ100に伝達するリードスクリューやタイミングベルトといった伝達機構などから構成される。コントロール部16は、分注処理の進捗に応じて、適宜、このZ駆動部14を駆動して、ノズルチップ100を昇降させる。また、このZ駆動部14は、ノズルチップ100を発光部20に対して軸方向に相対移動させる気泡検出装置の移動手段としても機能している。気泡検出する際、コントロール部16は、このZ駆動部14を駆動して、ノズルチップ100を、発光部20に対して軸方向に相対移動させる。なお、本実施形態では、部品の共用化などの観点から、分注装置10で用いられるZ駆動部14を、気泡検出装置の移動手段として用いたが、ノズルチップ100を発光部20に対して軸方向に相対移動できるのであれば、分注装置10のZ駆動部14とは別にノズルチップ100の移動機構を設けてもよい。また、ノズルチップ100ではなく、発光部20および受光部22をZ方向に移動させる移動機構を設けてもよい。
【0019】
コントロール部16は、分注装置10および当該分注装置10に組み込まれた気泡検出装置の駆動を制御する部位で、各種演算を行なうCPUや、各種データを記憶するメモリなどを備えている。このコントロール部16は、分注処理の進捗に応じて、ポンプ12や、Z駆動部14などを駆動制御する。また、気泡検出が必要な場合には、Z駆動部14や発光部20を駆動するとともに、受光部22で検出された光量に基づいて、気泡を検出する。また、コントロール部16は、受光部22で検出された光量を他の分析用途(例えばノズルチップ100における検体の液量検出等)に用いるようにしてもよい。すなわち、コントロール部16は、検出された光量のデータを用いて複数種の検体分析処理に応じた駆動制御を可能とし、分析処理の一つとして本発明の気泡検出処理が選択されるようにしてもよい。
【0020】
次に、気泡検出装置での気泡検出の原理について、従来技術と比較して説明する。はじめに、従来の気泡検出技術について、図5を参照して簡単に説明する。図5は、従来技術での気泡検出の原理を説明する図である。
【0021】
従来でも、ノズルチップ100に光を照射し、そのとき得られる透過光量に基づいて気泡を検出する技術があった。ただし、従来技術は、照射光として、水の吸光ピークの波長の光ではなく、700nm〜1000nmの波長の光を用いる点で本実施形態と大きく異なっている。かかる波長の光を用いていた従来技術では、ノズルチップ100内に液体がある場合には、ノズルチップ100が空の場合に比して光の散乱量が減少し、ひいては、透過光量が増加することを利用して、気泡を検出していた。
【0022】
具体的に、従来技術での気泡検出の流れについて説明する。従来技術において気泡を検出する場合には、予め空のノズルチップ100に赤外光(700nm〜1000nm)を照射し、そのとき、得られる透過光量の変化波形を、基準波形として取得する。図5(a)は、この基準波形の一例を示す図である。続いて、検出対象である液体検体を収容したノズルチップ100にも赤外光(700nm〜1000nm)を照射し、そのとき、得られる透過光量の変化波形を、検出波形として取得する。図5(b)は、この従来技術における検出波形の一例を示す図であり、図5(c)は、基準波形と検出波形を重ね合わせた図である。ここで、図5(c)から明らかなとおり、波長700nm〜1000nmの赤外光を照射した場合、空のノズルチップ100の透過光量よりも、液体を収容したノズルチップ100の透過光量のほうが大きい。これは、液体が存在する場合は、液体が存在しない場合に比して、散乱が少なくなるためである。
【0023】
ただし、液体を収容したノズルチップ100のうち、気泡により空気層が生じている箇所では、液体が存在しないため、空のノズルチップ100の場合と同程度の散乱が生じることになる。そのため、気泡箇所では、透過光量が、急激に落ち込む。従来技術では、この検出波形の急激な落ち込み箇所を気泡箇所として検出する。
【0024】
ただし、検出波形単独では、この落ち込み箇所を自動的に特定することが困難であるため、通常、基準波形と検出波形との差分を取得し、その差分値に基づいて気泡を検出する。図5(d)は、基準波形と検出波形との差分値の波形を示す図である。図5(d)から明らかなとおり、気泡検出箇所では、差分値がほぼゼロとなる。従来技術では、この差分値がほぼゼロとなる箇所を気泡箇所として検出していた。
【0025】
なお、従来技術において、照射光を700nm以上としたのは、検出対象である液体検体(血液)に含まれる各種成分の吸光ピークを避けるためである。すなわち、検出対象である血液には、通常、溶血やビリルビンといった成分が含まれている。このうち溶血は、430nm、520nm、575nm近傍で吸光ピークを取ることが知られている。また、ビリルビンは500nm近傍で吸光ピークを取ることが知られている。従来技術では、こうした含有成分の吸光ピークを範囲に含まないように、照射光の波長を700nm以上としている。また、受光部22において検出でき得る波長範囲の限界から、照射光の波長の最大値を1000nmとしていた。
【0026】
しかし、従来技術は、含有成分による吸光の影響は考慮しているものの、含有成分による散乱の影響は考慮されていなかった。そのため、液体検体に、光を散乱させる散乱体が含有されている場合には、その含有量によっては、気泡を正確に検出できない場合があった。
【0027】
例えば、血液には、乳びと呼ばれる散乱体が含まれている。かかる乳びの含有量が多いと、液体(血液)が存在する箇所でも、照射光の大部分が散乱し、透過光量が小さくなる。結果として、気泡箇所と液体が存在する箇所とでの透過光量の差が小さくなり、気泡があっても、透過光量の急激な落ち込みが発生しない場合がある。かかる場合には、気泡を正確に検出することができない。
【0028】
本実施形態では、こうした問題を解決するために、水の吸光ピークである1450nmの波長の光を照射している。かかる波長の光を液体に照射すると、その大部分は、液体(水)に吸収されてしまうため、透過光量は非常に少なくなる。一方、照射箇所に液体が存在しない場合は、水による吸光が生じないため、透過光量は大きくなる。本実施形態では、この液体の有無による透過光量の違い(吸光量の違い)を利用して、気泡を検出している。具体的に、本実施形態での気泡検出の流れと気泡検出できる原理について図3を参照して説明する。
【0029】
本実施形態でも、従来技術と同様、予め、液体検体が収容されていない空のノズルチップ100を軸方向に移動させつつ、赤外光を照射し、その際得られた透過光量の変化波形を基準波形としてメモリに記憶しておく。図3(a)は、基準波形の一例を示す図である。
【0030】
気泡を検出する場合は、検出対象となる液体検体を収容したノズルチップ100を軸方向に移動させつつ、赤外光を照射し、その際得られた透過光量の変化波形を検出波形として取得する。図3(b)は、この検出波形の一例を示す図であり、図3(c)は、基準波形と検出波形を重ねた図である。コントロール部16は、この検出波形と基準波形との差分を取り、この差分値の変化波形に基づいて気泡を検出する。図3(d)は、この差分値の変化波形の一例を示す図である。
【0031】
こうした手順で気泡が検出できるのは次の理由による。空のノズルチップ100に赤外光(波長1450nm)を照射した場合、一部は、ノズルチップ100により吸収・散乱されるものの、残りの大部分は、ノズルチップ100を透過する。この透過光量は、図3(a)に示すように、ノズルチップ100の径が太くなるにつれて小さくなり、ノズルチップ100の径が一定になれば一定になる。
【0032】
一方、液体検体を収容したノズルチップ100に赤外光(波長1450nm)を照射した場合、ノズルチップ100による吸収・散乱に加えて、液体検体に含有される水による吸光が生じる。すなわち、本実施形態では、水が吸収しやすい波長である1450nmの光を用いている。かかる波長の光を、水を含んだ液体検体に照射した場合、その多くが、水で吸収されることになる。結果として、図3(b)、図3(c)に示すとおり、空のノズルチップ100に照射した場合に比して、透過光量が大幅に減少する。
【0033】
ただし、液体検体のうち、気泡が生じて、空気の層のようになっている部分については、水による吸光は生じないため、透過光量は、空のノズルチップ100に照射した際に得られる透過光量と、ほぼ同じになる。その結果、図3(b)、図3(c)に示すように、気泡箇所においては、透過光量が、急激に増加する(空のノズルチップ100の透過光量とほぼ同じ値になる)。そして、基準波形と検出波形との差分値の波形(図3(d)の波形)に着目すると、気泡箇所では、基準波形および検出波形の差分値がほぼ0になる。本実施形態では、この差分値が、ほぼ0になる箇所を、気泡箇所として検出する。
【0034】
なお、検出波形ではなく、基準波形と検出波形との差分波形に基づいて気泡検出を行うのは、ノズルチップ100による吸光や散乱の影響を除去するためである。すなわち、液体検体が収容されていない場合(図3(a)の場合)、収容されている場合(図3(b)の場合)のいずれにおいても、ノズルチップ100による吸光や散乱が生じている。基準波形と検出波形との差分を取ることにより、このノズルチップ100による吸光や散乱の影響を除去でき、液体が存在しない箇所での差分値を、ほぼ0にすることができる。その結果、テーパ部のように、気泡の有無に関係なく、透過光量が変化する部分でも、気泡箇所を容易に特定することができる。
【0035】
ここで、一般に、液体検体における水分量は、散乱体(乳び)よりも遥かに多く、液体検体に含まれる水で吸収される光量は、液体検体に含まれる散乱体で散乱される光量よりも十分に大きい。したがって、検体ごとの散乱体の含有量のバラツキに起因して透過光量がバラついたとしても、液体の存在する箇所では、液体の存在しない箇所よりも透過光量は、十分に小さくなる。そのため、検体に含まれる散乱体の量に関わらず、常に、気泡を確実に検出することができる。つまり、本実施形態によれば、液体検体に散乱体が含まれていても、確実に気泡を検出することができる。
【0036】
なお、本実施形態では、液体検体として血液を例示したが、散乱体を含有する可能性のある液体検体であれば、他の検体、例えば、尿などであってもよい。
【符号の説明】
【0037】
10 分注装置、12 ポンプ、14 Z駆動部、16 コントロール部、20 発光部、22 受光部、24 絞り板、100 ノズルチップ、110 検体容器。
【特許請求の範囲】
【請求項1】
透光性材料からなるチューブ体に収容された液体中の気泡を検出する気泡検出装置であって、
水の吸光ピーク波長と同じ波長の光を、前記チューブ体に向かって照射する光源と、
前記チューブ体を挟んで前記光源と反対側に設置され、前記チューブ体を通過した光の光量を検出する受光手段と、
前記チューブ体を、前記光源および前記受光手段に対して、軸方向に相対移動させる移動手段と、
前記移動手段の駆動を制御するとともに、前記チューブ体の軸方向への相対移動に伴う前記受光手段で検出される透過光量の変化に基づいて気泡の有無を判断する制御手段と、
を備える気泡検出装置。
【請求項2】
請求項1に記載の気泡検出装置であって、さらに、
液体が収容されていない空のチューブ体を軸方向に相対移動させつつ光照射した際に得られる透過光量の変化を記憶する記憶手段を備え、
前記制御手段は、前記空のチューブ体で得られる透過光量と、前記液体を収容したチューブ体で得られる透過光量と、の差分値に基づいて気泡の有無を判断する、
ことを特徴とする気泡検出装置。
【請求項3】
請求項1または2に記載の気泡検出装置であって、さらに、
前記チューブ体を透過した光のうち特定高さの透過光のみを前記受光手段に導く絞り板を備えることを特徴とする気泡検出装置。
【請求項1】
透光性材料からなるチューブ体に収容された液体中の気泡を検出する気泡検出装置であって、
水の吸光ピーク波長と同じ波長の光を、前記チューブ体に向かって照射する光源と、
前記チューブ体を挟んで前記光源と反対側に設置され、前記チューブ体を通過した光の光量を検出する受光手段と、
前記チューブ体を、前記光源および前記受光手段に対して、軸方向に相対移動させる移動手段と、
前記移動手段の駆動を制御するとともに、前記チューブ体の軸方向への相対移動に伴う前記受光手段で検出される透過光量の変化に基づいて気泡の有無を判断する制御手段と、
を備える気泡検出装置。
【請求項2】
請求項1に記載の気泡検出装置であって、さらに、
液体が収容されていない空のチューブ体を軸方向に相対移動させつつ光照射した際に得られる透過光量の変化を記憶する記憶手段を備え、
前記制御手段は、前記空のチューブ体で得られる透過光量と、前記液体を収容したチューブ体で得られる透過光量と、の差分値に基づいて気泡の有無を判断する、
ことを特徴とする気泡検出装置。
【請求項3】
請求項1または2に記載の気泡検出装置であって、さらに、
前記チューブ体を透過した光のうち特定高さの透過光のみを前記受光手段に導く絞り板を備えることを特徴とする気泡検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−113652(P2013−113652A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258692(P2011−258692)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
[ Back to top ]