
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。
【発明の詳細な説明】
【関連出願の相互参照】
【0001】
これは本発明についての最初の出願である。
【技術分野】
【0002】
この発明は、ロボットの分野に関する。より正確には、この発明は水中の遠隔操作ビークルの位置をリアルタイムで決定する技術分野に関する。
【背景技術】
【0003】
水ダムのセキュリティプログラムの一環として、この数年間、水中遠隔操作ビークル(ROV)が開発されてきた。そのような遠隔操作ビークルは、水中環境で行われる様々な検査業務に使用することができる。ビークルは、ダム表面、岩とコンクリートの界面、タービン生産に関連する水中機器の検査、および主要な欠陥の位置および大きさを突き止めるために使用することが好ましい。
【0004】
当業熟練者は、長年を経てダムのコンクリートおよび他の浸漬された要素の劣化を修理する必要があることを理解している。したがって、復旧作業を準備するために、検査が行われる。清掃プロセスの前に取水口の障害物も点検される。
【0005】
遠隔操作ビークルがダムを検査するときに、例えば正確に配置された搭載カメラを使用して表面の亀裂または欠陥が識別され、遠隔操作ビークルは仮想環境で再生される。仮想環境は、ダムの完全な縮尺のグラフィカルモデル(例えばCote,J.、Lavallee,J.の「Augmented Reality Graphic, Interface for Upstream Dam Inspection」、SPIE、Telemanipulator and Telepresence Technologies II、フィラデルフィア、1995年10月に開示される通り)ならびに潜水艦の動的グラフィカルモデルから構成される。後で、保守要員が識別した欠陥を報告し、それらの展開を時間的に追跡し、復旧工事を実行する。そのような業務を効率的に実行するために、遠隔操作ビークルは、ダムに対するその厳密な位置をリアルタイムに出す、正確なナビゲーションシステムを装備しなければならない。最新技術のナビゲーションシステムは、位置を測定する場合のサンプリング速度のため、水中ビークルのためのリアルタイムナビゲーションを達成せず、システムの精度は通常充分に高くない。
【非特許文献1】Cote,J.、Lavallee,J.の「Augmented Reality Graphic, Interface for Upstream Dam Inspection」、SPIE、Telemanipulator and Telepresence Technologies II、フィラデルフィア、1995年10月
【0006】
水中の可視度が非常に低い環境で、またはダムの構造が非常に複雑である場合、遠隔操作ビークルの位置を特定するために、リアルタイム測位を達成するナビゲーションシステムが必要である。
【0007】
したがって、上で明らかにした欠点を克服する方法および装置が必要である。
【発明の開示】
【0008】
本発明の目的は、水中で動作する遠隔操作ビークルのリアルタイム測位を達成するための方法を提供することである。
【0009】
本発明の別の目的は、水中で動作する遠隔操作ビークルをリアルタイムで測位するための装置を提供することである。
【0010】
本発明の第一の側面によれば、水中を最高速度で移動することのできる遠隔操作ビークルの位置をリアルタイムで決定するための方法であって、第一サンプリング周波数でビークルの位置をサンプリングすること、第一サンプリング周波数とは独立した第二サンプリング周波数でビークルの瞬間速度をサンプリングすること、ここで二回の速度サンプリングの間に遠隔操作ビークルが移動する距離を二回の速度サンプリング間の期間で除算した結果が,最高速度より小さいかそれに等しいこと、およびビークルの位置情報およびビークル速度からビークルの位置をリアルタイムで決定することを含む方法が提供される。
【0011】
本発明の別の側面によれば、水中を最高速度で移動することのできる遠隔操作ビークルの位置をリアルタイムで決定するための装置であって、第一サンプリング周波数でビークルのサンプリングされた位置信号を提供する位置センサユニットと、第一サンプリング周波数とは独立した第二サンプリング周波数でサンプリングされた瞬間速度信号を提供する瞬間速度センサユニットと、ここで二回の速度サンプリングの間に遠隔操作ビークルが移動する距離を二回の速度サンプリング間の期間で除算した結果が,最高速度より小さいかそれに等しくなり、サンプリングされた位置信号およびサンプリングされた瞬間速度信号を受け取って前記ビークルの位置信号をリアルタイムで決定するナビゲーションユニットを備えた装置が提供される。
【0012】
本発明の別の側面によれば、物体の水中の位置をリアルタイムで決定するための方法であって、平均位置誤差を零にして第一の所定の周波数で物体の位置の推定をサンプリングすること、第一の所定の周波数より高い第二の所定の周波数で物体の速度および加速度のうちの少なくとも一つの推定をサンプリングして、結果的に零でない平均誤差で位置推定を得ること、および位置の推定を速度および加速度のうちの少なくとも一つの推定と組み合わせて、第二の所定の周波数で位置を提供することを含む方法が提供される。
【0013】
本発明の別の側面によれば、水中の物体の位置をリアルタイムで決定するための装置であって、零に等しい平均誤差を有し、第一の所定の周波数で物体の推定位置信号を提供するための位置センサユニットと、第一の所定の周波数より高い第二の所定の周波数で対応する瞬間速度信号および対応する瞬間加速度信号のうちの少なくとも一つを提供するための瞬間速度センサユニットおよび加速度センサユニットのうちの少なくとも一つと、推定位置信号と対応する瞬間速度信号および対応するサンプリングされた瞬間加速度信号のうちの少なくとも一つとを受け取り、かつ結合して、第二の所定の周波数で位置信号をリアルタイムで提供する位置提供ユニットとを備えた装置が提供される。
【0014】
本発明のさらなる特徴および利点は、添付の図面と組み合わせることで、以下の詳細な説明から明らかになるであろう。
【発明を実施するための最良の形態】
【0015】
添付の図面全体を通して、同様の特徴は同様の参照番号によって識別されている。
【好適な実施形態の詳細な説明】
【0016】
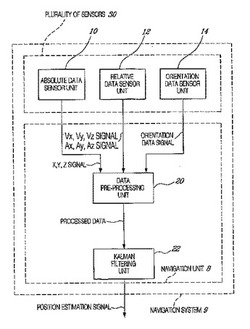
図1を参照すると、本発明の好適な実施形態に係るナビゲーションシステム9を示すブロック図が示されている。
【0017】
ナビゲーションシステムは、データ前処理ユニット20およびカルマンフィルタリングユニット22を備える。
【0018】
所定のセンサの障害/誤動作が検出された場合、該所定のセンサによって提供されるデータが処分されることは理解されるであろう。
【0019】
データ前処理ユニット20は、絶対データセンサユニット10に由来するX,Y,Z信号、相対データセンサユニット12によって提供される速度信号(Vx,Vy,Vz)および加速度信号Ax,AyおよびAz、ならびに方位データセンサユニット14によって提供される方位データ信号を受け取る。
【0020】
絶対データセンサユニット10は、零に等しい平均位置誤差で、第一サンプリング周波数で絶対位置データ信号を提供する。本発明の一実施形態では、絶対データセンサユニット10は位置センサユニットと呼ぶことができる。
【0021】
相対データセンサユニット12は、第二サンプリング周波数で相対データ信号を提供する。本発明の一実施形態では、相対データセンサユニット12を瞬間速度センサユニットと呼ぶことができることは理解されるであろう。実際、そのような相対データセンサユニット12は瞬間速度を提供し、結果的に零に等しくない平均誤差の位置推定をもたらす。
【0022】
第二サンプリング周波数が実質的に第一サンプリング周波数より高いことは理解されるであろう。
【0023】
絶対データセンサユニット10が、Z信号を提供する測深器ならびにXおよびY信号を提供する音響センサの少なくとも一つを含むことは理解されるであろう。
【0024】
さらに、相対データセンサユニット12が、Vx,VyおよびVz信号を提供するドップラセンサ、ならびにAx,AyおよびAz信号を提供する加速度計の少なくとも一つを含むことは理解されるであろう。
【0025】
さらに、方位データセンサユニット14が、Ωx、Ωy、およびΩz信号を提供するジャイロスコープセンサ、ΩxおよびΩy信号を提供する傾斜計、ならびにΩz信号を提供するコンパスのうちの少なくとも一つを含むことは理解されるであろう。
【0026】
データ前処理ユニット20は受け取ったデータを前処理し、処理されたデータをカルマンフィルタリングユニット22に提供する。
【0027】
下で説明する通り、カルマンフィルタリングユニット22は位置推定信号を提供する。
【0028】
本発明の好適な実施形態では、遠隔操作ビークルナビゲーションシステムは、ビークルの位置および移動に関する情報を提供する多数のセンサ30、ならびにナビゲーションユニット8を備える。好ましくは、位置推定を改善し、かつセンサの障害を克服するために、多数のセンサ30によって提供されるセンサデータは冗長である。
【0029】
下に開示する通り、ナビゲーションユニット8は多数のセンサ30によって提供されるセンサデータを使用し、ビークルの位置の最良可能な推定値を求める。下に開示する通り、好適な実施形態で、ナビゲーションユニット8はカルマンフィルタリング技術を使用して動作する。
【0030】
さらに詳しくは、ナビゲーションユニット8は、リアルタイム位置推定信号を提供するために、方位データセンサユニット14によって提供される方位信号を使用して、絶対データセンサユニット10によって提供される位置信号および相対データセンサユニット12によって提供される速度信号を併合する。
【0031】
好適な実施形態では、絶対データセンサユニット10は、Z信号を提供する測深器センサユニットと、XおよびY信号を提供する音響センサユニットとを含む。
【0032】
依然として本発明の好適な実施形態では、相対データセンサユニット12は、Vx,Vy,Vz信号を提供するドップラセンサユニットと、Ax,Ay,Az信号を提供する加速度計センサユニットとを含む。
【0033】
方位データセンサユニット14は、本発明の好適な実施形態では、Ωx,ΩyおよびΩz信号を提供するジャイロスコープセンサユニットと、ΩxおよびΩy信号を提供する傾斜計と、Ωz信号を提供するコンパスとを含む。センサ障害を回避するために、冗長性が有利に使用されることは理解されるであろう。
【0034】
ドップラセンサおよび音響センサを使用するナビゲーションシステムに関係する先行技術の研究は、1999年8月ニューハンプシャー州ダラムにおける無人無索潜水装置技術(Unmanned Untethered Submersible Technology)に関する第11回国際シンポジウムの会議録中のWhitcomb,L.L.、Yoerger,D.R.、Hanumant,Sの「Combined Doppler/LBL Based Navigation of Underwater Vehicles」、およびSpindel,R.C.、Porer,R.P.、Marquet,W.M.、Durham,J.L.の「A high-resolution pulse-Doppler underwater acoustic navigation system」IEEE Journal of Oceanic Engineering、第OE-1巻、第1号6〜13頁、1976年)に見ることができる。
【0035】
当業熟練者は、実際のシステムで、センサが必ずしも固定速度でデータを送信せず、データ取得がしばしば断続的になることを理解されるであろう。したがって、非同期データ配送および測定の遅延に対処するために追加の開発が行われる。測定の遅延は、測定が有効である瞬間と、それがナビゲーションユニットに利用可能になる瞬間との間の時間と定義することが好ましい。
【0036】
ナビゲーションユニットは、多数のセンサ30に由来するデータの様々なレートを受け入れるように適応させることが好ましいことは理解されるであろう。さらに、有効なデータだけが位置推定に使用されることを確実にするためにフィルタスイッチングプロセスを使用する。
【0037】
通常ジャイロスコープおよび加速度計センサユニットが、位置、線形速度および加速度、方位、ならびに角速度を提供することは理解されるであろう。しかし、本発明の好適な実施形態では、方位、角速度、および加速度だけがジャイロスコープおよび加速度計センサユニットによって提供される。
【0038】
前に開示した通り、ナビゲーションシステム9の多数のセンサは、潜水艦に搭載されたソナートランスデューサのX,Y,Z信号を提供する音響センサユニットを含む。
【0039】
音響位置センサユニットによって提供される位置信号および測深器センサユニットによって提供されるZ信号が一つに結合されて、絶対位置信号をもたらすことは理解されるであろう。測深器センサユニットはずっと正確、高速、かつ信頼できる測定を提供するので、本発明の好適な実施形態では、Z信号が、音響位置センサユニットからではなく、測深器センサユニットから収集されることは理解されるであろう。
【0040】
上述の通り、ナビゲーションシステム9の多数のセンサ30の相対データセンサユニット12はさらに、一般的にDVLとして識別されるドップラ速度センサユニットを含み、それはビークルのX,Y,Z線形速度信号を提供する。ビークルの線形速度信号の積分により、位置X,Y,およびZが得られる。
【0041】
好適な実施形態では、多数のセンサ30は以下の特徴を有する。
【表1】

【0042】
カルマンフィルタは、Brown,R.G.、Hwang,P.Y.C.の「Introduction to Random Signals and Applied Kalman Filtering」第三版、John Wiley & Sons、1997年によくカバーされている。当業熟練者には周知の通り、カルマンフィルタは、反復および再帰プロセスに基づく最適線形推定量を使用する。
【0043】
より正確には、カルマンフィルタは、システムの状態の最適推定値を再帰的に求める。一般的に、3次元空間に展開するビークルの状態を記述するベクトルは、次のように表わすことができる。
【0044】
x=[xyzx*y*z*αβγΩxΩyΩz]′
【0045】
ここで、xyzはビークルの位置座標であり、x*y*z*は対応する速度であり、αβγはビークルの方位を記述するオイラー角であり、ΩxΩyΩzは角速度である。
【0046】
好適な実施形態では、カルマンフィルタリングユニット22で使用されるカルマンフィルタは、ビークルの位置のみに適用される。Xベクトルは、x=[xyzx*y*z*]′と定義される。
【0047】
カルマンフィルタは、次の状況の一つが発生したときに、ビークルの位置の新しい推定値を生成する。音響位置センサユニットに由来する新しい位置信号が得られた場合には、カルマンフィルタリングユニット22のカルマンフィルタは、新しい位置信号により新しい推定値を計算する(測定更新プロセス)。一定量の時間dt前に新しい位置信号が得られない場合には、カルマンフィルタは、位置および速度の以前の情報に基づいて現在の位置を更新する(時間更新プロセス)。
【0048】
次式1および2によって記述されるように、X(k−1)と表記される、以前の反復からの最適推定値は、状態遷移行列Aを通して時間的に投影され、ノイズの多い入力U(k)(相対データセンサユニット)は、入力を状態に関連させる行列Bを通してシステムに供給される。
【0049】
Ppriori=A・P・A′+Q (1)
【0050】
X(k)=A・X(k−1)+B・U(k) (2)
【0051】
方程式2で、状態Xはビークルの線形位置であり、Uは線形速度センサからの入力である。行列AおよびBはシステムの運動学を反映する。
【0052】
方程式1は、推定状態Xの誤差の分散を表わす誤差共分散行列Pを時間的に投影する。Qは、測定値U(k)からのプロセスノイズに関連する共分散行列である。
【0053】
このプロセスは式3〜5によって形式化され、そこで絶対センサユニット10に由来する直接ノイズ状態測定値Z(k)を以前の状態の推定値X(kpast)と比較して補正値を出し、この以前の推定値に適応して新しい推定値X(k)を得る。行列Hは測定値を状態に関連付ける。
【0054】
K=Ppriori・H′・(H・Ppriori・H′+R)-1 (3)
【0055】
「Xcorrige(kpast)=X(kpast)+K・(Z−H・X(kpast)) (4)
【0056】
P=(I−K・H)・Ppriori (5)
【0057】
各推定(以前の推定値X(kpast)および測定値Z(k))の重要性は、カルマン利得Kによって決定される。
【0058】
カルマン利得Kは次に、プロセスノイズ共分散(間接測定値)および測定ノイズ共分散(直接測定値)をそれぞれ表わす行列QおよびRによって順番に決定される。カルマン利得Kは0から1の間の値を取り、0は間接測定値のみの使用を表わし、1は直接測定値のみを表わす。
【0059】
方程式1で修正された誤差共分散行列Pは、測定更新プロセスを反映するために、方程式5で再び補正され続けると、方程式4のZ(k)は、位置センサに由来する測定値を表わし、ZとXとの間には直接的対応が存在するので、Hは[1 0]に等しい。
【0060】
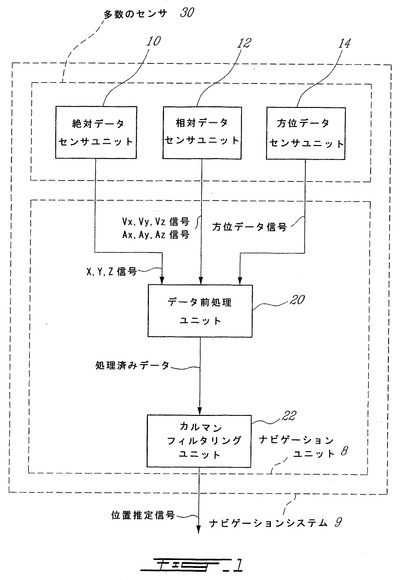
速度を積分して位置が得られるので、ドップラ速度センサユニットに由来するノイズは反復の都度、累積される。この結果、発散位置誤差が生じ、したがって音響位置センサユニットは単独では、図2に示すように長時間にわたって使用不能になる。音響位置センサユニットのような典型的直接位置センサの位置誤差は重要である。これらのシステムは中断する傾向があり、短時間の大きいノイズレベルを持つ。しかし、それらの位置推定値は長時間にわたってずれることはない。誤差は零平均に近く、それらの長期運転の信頼性を高める。
【0061】
音響位置センサユニットおよびドップラ速度センサユニットの両方を組み合わせたカルマンフィルタリングユニット22から得られる位置推定信号について、シミュレーションを行なった。シミュレーションの結果を図2に示す。
【0062】
図2に示す通り、該組合せは、音響位置センサユニットおよびドップラ速度センサユニットの両方をうまく利用し、より正確には、音響位置センサユニットからのドリフトが無いこと、およびドップラ速度センサユニットによって提供される速度信号の平滑性を利用している。
【0063】
しかし図2におけるシミュレーションの結果を生じるために使用した基本的カルマンフィルタリングユニット22が、用途によって要求される精度を満たさないことは、理解されるであろう。第一に、音響位置センサユニットによって提供される位置信号は、それが利用できるようになったときには有効ではなく、特定の量の時間だけ前に有効である。第二に、センサ障害が発生した場合、それを検出しなければならず、カルマンフィルタリングユニット22は、障害のあるセンサによって提供されたデータを新しい推定値に組み込まないようにしなければならない。最後に、多数のセンサの更新率はセンサ毎に異なるかもしれない。例えばビークルがトランスポンダビーコンから遠い場合、音響信号はトランスポンダビーコンまでの距離に依存するので、測定はより多くの時間がかかる。
【0064】
本発明の好適な実施形態では、各センサに由来するデータが好ましくは、カルマンフィルタリングユニット22に送る前に多少の変換が必要であることは理解されるであろう。
【0065】
より正確には、ビークルの運動学モデルは、固定フレームと呼ばれる慣性系に対するその運動を記述する。便宜上、その質量中心に対するビークルの運動方程式が作成される。局所として識別される基準フレームが質量中心に付加され、その方位は慣性主軸に対応する。したがって、固定フレームに表わされる固定フレームに対する局所フレームの位置および速度を記載するために、多数のセンサ30から得られる位置信号および速度信号を変換することが好ましい。
【0066】
好適な実施形態では、そのような処理は、データ前処理ユニット20によって実行される。
【0067】
音響位置センサユニットによって提供される位置信号は、次のように処理される。
【0068】
[FIXEPLOCAL]FIXE=[FIXEPPINGER]FIXE−rot[FIXELOCAL][LOCALPPINGER]LOCAL
【0069】
ここで[FIXEPLOCAL]FIXEは、固定フレームに対するビークルの質量中心の位置ベクトルであり、[FIXEPPINGERR]FIXEは固定フレームに対するビークルのトランスポンダ(音響システムのエミッタ部、およびしたがってその位置が音響システムによって測定されるポイント)の位置ベクトルであり、rot[FIXELOCAL]は過去に局所フレームから固定フレームへ移動するための回転行列である。行列は、DQI(rot[FIXE,DQI])によって提供される方位、およびビークル(rot[LOCAL,DQI])上のその方位を使用して構築される。
【0070】
[LOCALPPINGER]LOCALは、ビークルの質量中心に対するトランスポンダの位置ベクトルであり、それはビークルのフレーム内で測定される。
【0071】
ドップラ速度センサユニットによって提供される速度信号は、次のように処理される。
【0072】
[FIXEVLOC]FIXE=ROT[FIXE,DVL][FIXEVDVL]DVL-[FIXEΩLOC]FIXEΛ〔ROT[FIXE,LOC][LOCPDVL]LOC〕
ここで、ROT[FIXE,DVL]は固定フレームに対するドップラ速度センサユニットの方位を記述する回転行列である。
【0073】
[FIXEVDVL]DVLは、ドップラ速度センサユニットを使用して得られる。
【0074】
[FIXEΩLOC]FIXEは、ジャイロスコープセンサユニットから得られる局所フレームの角速度である。
【0075】
[LOCPDVL]LOCは、局所フレームに表わされる局所フレームに対するドップラ速度センサユニットの位置ベクトルである。
【0076】
前に説明したとおり、センサデータは、異なりかつ変化するレートで多数のセンサ30によって提供される。
【0077】
センサフュージョンアルゴリズムは、どの信号が提供されるかに応じて適切な推定手順に繰り替えることにより、非同期信号を受け入れることは理解されるであろう。例えばドップラ速度センサユニットは、位置信号が音響位置センサユニットによって提供されるレートより約12倍高いレートで速度信号を提供する。
【0078】
ドップラ速度センサユニットおよび音響位置センサユニットが新しいデータを提供するときに、カルマンフィルタユニット22が使用される。しかし、12回のうち11回はドップラ速度センサユニットが速度信号を提供するだけであり、したがって位置更新を実行するために速度信号の単純な積分が使用され、そのような積分はカルマンフィルタリングユニット22で実行される。
【0079】
音響位置センサユニットによって位置信号が提供されるときに、タイムスタンプが記録される。タイムスタンプの値は、実際の時間から校正遅延を引いたものである。このタイムスタンプは位置信号に関連する。
【0080】
二つの位置信号間の位置推定値は、メモリに維持される。新しい位置信号が音響位置センサユニットによって提供されると、アルゴリズムは、この新しいデータに関連付けられるタイムスタンプによって示される時間にメモリに記録された位置推定値に対し補正を実行する。次いで、ドップラ速度センサユニットによって提供された速度信号を使用して、この時間から実際の時間に位置更新が実行される。換言すると、方程式4の位置更新X(kpast)は新しい位置推定値と置換され、次いで、方程式2を使用して、過去のこの新しい位置推定値から実際の時間まで速度信号を積分することによって位置が更新される。この積分位相は、音響位置センサユニットによって提供される新しい位置信号が利用可能になるまで続く。好適な実施形態では、そのような処理はカルマンフィルタリングユニット22によって実行される。
【0081】
ビークルの動力学モデルおよび対応するコントローラにより、データが生成される。図2およびそれ以降の図で、モデルの実際の位置は仮想潜水艦信号として識別される。音響位置センサユニットによって提供される位置信号を生成するために、上に示した通り、実験から得られた分散を持つホワイトノイズが仮想潜水艦信号位置に付加される。
【0082】
シミュレーションのドップラ速度センサユニットによって提供される速度信号は、モデルの速度から得られる。音響位置センサユニットによって提供される位置信号は「V測地信号」として識別され、ドップラ速度センサユニットは「DVL単独測地」として識別される一方、カルマンフィルタリングユニットによって提供される位置推定値は「カルマン位置信号」として識別される。
【0083】
図2に示される第一シミュレーションの結果は、カルマンフィルタリングユニット22によって提供されるカルマン位置信号を示す。音響位置センサユニットを使用して提供される位置信号、およびデータドップラ速度センサユニットによって提供される速度信号を示す。
【0084】
ビークルは零位置で始動し、次いで−2mの第一目標に到達する。時間t=500秒で、ビークルは目標位置0mに達し、時間t=1000秒で−2m目標に戻る。シミュレーションの目的は、カルマンフィルタリングユニット22の適切な実行を検証することである。分かりやすくするために、音響位置センサユニットによって提供される位置信号はこのグラフには示されない。「DVL単独位置信号」によって示されるドップラ速度センサユニットの位置ドリフトは非常に緩慢であり、誤差は1時間のシミュレーション後にようやく有意になる。このグラフに描画されたデータは、4時間のシミュレーション後に開始された30分のシミュレーションを表わす。
【0085】
このシミュレーションでは、音響位置センサユニットによって提供される位置信号が瞬時に(つまり遅延無く)生成され、このシミュレーションではシステムの校正誤差およびセンサの障害が無いことは理解されるであろう。
【0086】
図3を参照すると、音響位置センサユニットの遅延およびドップラ速度センサユニットの障害の影響を開示するように意図されたシミュレーションを示すグラフが示されている。
【0087】
音響位置センサユニットに対し、5秒の遅延が設定されている。また、音響位置センサユニットによって提供される位置信号の位置推定値に対する影響を増幅するために、音響位置センサユニットに関連する分散は0.002に設定される。最初の10秒間の遅延の効果は、カルマン位置信号曲線が仮想潜水艦信号曲線に遅れて現れることである。
【0088】
ドップラ速度センサユニット14の障害は11秒に発生し、そこでカルマンDVLアクティブ信号曲線は1から零レベルに変化し、12秒で再びアクティブになる。障害時間中に、カルマンフィルタリングユニット22は、ドップラ速度センサユニットの入力を零値とみなす。音響位置センサユニットの遅延およびドップラ速度センサユニットの障害は、このナビゲーションシステムに内在している。
【0089】
シミュレーションの開始から20秒後に、音響位置センサユニットの遅延およびドップラ速度センサユニットの障害の累積誤差は約20cmである。
【0090】
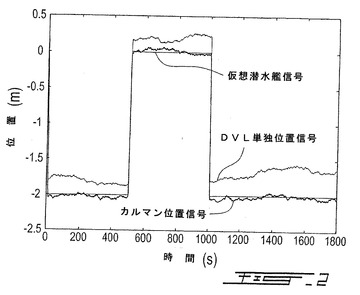
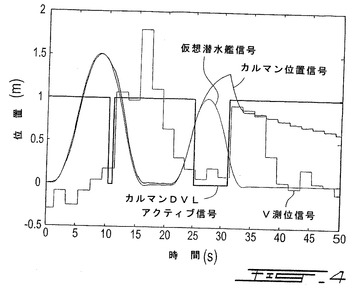
図4を参照すると、音響位置センサユニットの遅延およびドップラ速度センサユニットの障害に対して行われる補正を開示するさらなるシミュレーションが示されている。音響位置センサユニットの遅延に対して適用される補正の説明は、前に開示されている。ドップラ速度センサユニットの障害の場合に適用される補正は、このアルゴリズムでは非常に単純であり、短時間に対してうまく働く。アルゴリズムは最後の有効な速度信号を維持し、それにより時間更新手順を実行する。次いで、有効速度は特定の百分率で低減され、結果が次の時間更新のための新しい有効速度になる。
【0091】
より長い時間の場合、アルゴリズムは時間更新手順の実行を停止し、コントローラは自動から手動モードに切り替える。
【0092】
シミュレーションの最初の10秒間、位置推定値曲線(つまり「カルマン位置信号」曲線)はモデルの位置曲線(つまり「仮想潜水艦信号」曲線)に従う。これは、前のシミュレーションに比較して改善を表わす。最初のドップラ速度センサユニットの障害は、「カルマンDVLアクティブ信号」曲線によって示されるように、11秒に発生する。ビークルの位置に対して位置推定値のずれが依然として存在するが、ドップラ速度センサユニットの障害によって生じる位置誤差は、前のシミュレーションで得られたものに比較して小さい。シミュレーションの開始から20秒後、遅延およびドップラ速度センサユニットの障害の累積誤差は5cm未満である。他方、25秒に始まる障害のように、ドップラ速度センサユニットの障害が5秒を超えて続く場合、ドップラ速度センサユニットの障害中にビークルはその速度方向を変更するので、最後の有効速度を使用すると重要な誤差が生じる。しかし、時間が経過するにつれて、ビークルが静止している間に、音響位置センサユニットの影響下で、位置推定値曲線はビークル位置曲線に少しずつ近づいていく。
【0093】
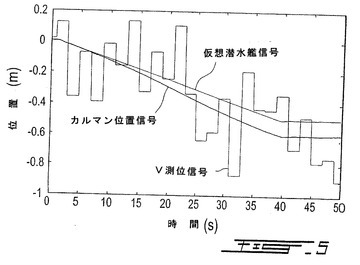
ドップラ速度センサユニットシステムによって提供される速度信号は、ビークル上の一つの特定の点の線形速度である。速度に適用される変換は、角速度および局所フレームに対するドップラ速度センサユニットシステムの中心の位置座標に依存する。この変換は必要であり、校正を正確に行なわなければならない。図5に示す次のシミュレーションで、ドップラ速度センサユニットは局所フレームに対して(−25cm,0,25cm)に配置される。しかし、XおよびZ軸に対して5cmの誤差が生じるので、この変換は、ドップラ速度センサユニットシステムが(−20cm,0,−20cm)に配置されるとみなす。位置ドリフトは角変位に依存し、図5から、ドップラ速度センサユニットの位置の小さい誤差がビークルの位置にかなりの誤差を生じることが観察できる。
【0094】
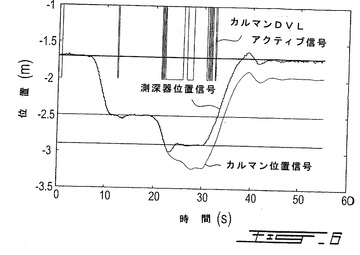
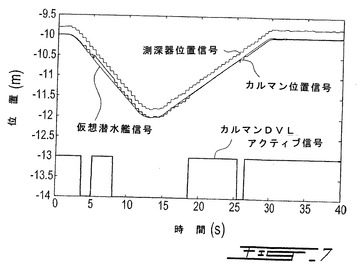
測深器センサユニットはZ座標を提供するために使用され、シミュレーションで使用された音響位置センサユニットに取って代わる。しかし、シミュレーション結果の再現より、前述した挙動の観察の方が興味深い。後続の図では、絶対センサは測深器であり、対応する曲線は「測深器位置信号」として識別される。測深器センサユニットは正確であり、カルマンフィルタリングユニット22から得られる曲線との比較点を確率するための基準とみなすことができる。ドップラ速度センサユニットによって提供される速度信号の単純な積分によって得られる位置曲線は描画されていない。しかし、ドップラ速度センサユニットによって提供される速度信号は、カルマンフィルタリングユニット22で使用される唯一のデータであるので、カルマン位置信号曲線は、ドップラ速度センサユニットを使用して計算された位置を表わす。「カルマンDVLアクティブ信号」曲線は、ドップラ速度センサユニットがアクティブ(アップレベル)であるか否か(ダウンレベル)を示す。図6で、ドップラ速度センサユニットシステムは何回も障害を発生している。短時間の障害の場合、前の速度の使用により、カルマンフィルタリングユニット22はその曲線を測深器センサユニットの曲線上に維持することができる。しかし、ドップラ速度センサユニットが長時間ダウンする場合、カルマンフィルタリングユニットは受け入れられる結果をもたらさない。図6に22秒から始まる状況の一例がある。
【0095】
Z座標について、測深器センサユニットはかなり優れた精度を有し、かつ比較的高い帯域幅を有するので、アルゴリズムは、ドップラ速度センサユニットの障害中に、図7に示すように前の有効速度を使用して時間更新を実行する代わりに、その信号を使用する。
【0096】
カルマンフィルタリングユニットを使用して、音響位置センサユニット、測深器センサユニット、およびドップラ速度センサユニットから受け取ったデータを併合するナビゲーションシステムを開示した。音響位置センサユニットによって提供される位置信号からの遅延およびドップラ速度センサユニットの障害の位置推定値に対する影響を、シミュレーション結果によって浮き彫りにした。カルマンフィルタリングユニット22のアルゴリズムは、音響位置センサユニットの固定時間遅延の補正を含み、シミュレーション結果は位置推定値のかなりの改善を示している。
【0097】
しかし、時間遅延が固定されていないことは当業熟練者には周知である。したがって、この開発の完全な利益を得るために、この時間遅延のモデルを作成することができる。ドップラ速度センサユニットの短い障害中に、ナビゲーションアルゴリズムは、欠如した情報を補償する。局所フレームに対する座標変換を精密に実行するために、ビークル上の位置システムの位置および方位を正確に測定することが最も重要であることは理解されるであろう。
【0098】
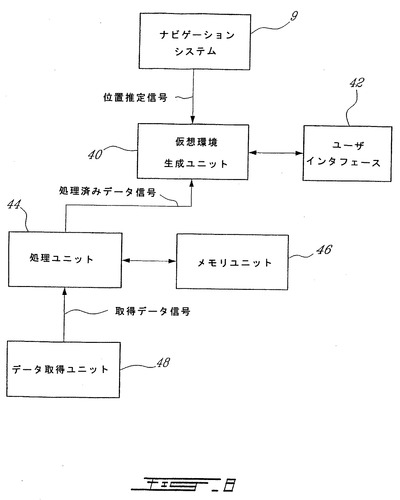
図8を参照すると、ナビゲーションシステム9を遠隔操作潜水艦でいかに有利に使用することができるかを示すブロック図が示されている。
【0099】
該システムは、ナビゲーションシステム9、仮想環境生成ユニット40、ユーザインタフェース42、処理ユニット44、メモリユニット46、およびデータ取得ユニット48を含む。
【0100】
仮想環境生成ユニット40は、遠隔操作潜水艦が下述するように動作する仮想環境を生成する。
【0101】
ユーザインタフェース42は、生成された仮想環境をオペレータに対して表示するために使用される。ユーザインタフェース42は、遠隔操作潜水艦を制御するためにも使用することができる。
【0102】
データ取得ユニット48は、取得データ信号を提供する。データ取得ユニット48は、カメラ、ソナー、およびレーザのうちのいずれか一つとすることができる。データ取得ユニット48は、遠隔操作ビークルの周囲で収集された関連情報を提供するために使用される。
【0103】
処理ユニット44は取得データ信号を受け取り、受け取った取得データ信号を処理し、処理したデータを仮想環境生成ユニット40に提供する。
【0104】
メモリユニット46は、処理されたデータの少なくとも一部分を格納するために使用することができる。
【0105】
仮想環境生成ユニットは、位置推定信号および処理されたデータ信号を併合して、仮想環境を生成する。生成された仮想環境は、関心のある周囲の物体と共に遠隔操作ビークルの3次元ビューであることが好ましい。関心のある物体は、データ取得ユニット48を使用して検出することが好ましい。代替的に、関心のある物体は、仮想環境生成ユニット40によって生成された仮想環境に、オペレータがユーザインタフェース42を使用して入力することもできる。仮想環境は、遠隔操作ビークルに関連するナビゲーションデータをさらに含むことができることは理解されるであろう。そのようなナビゲーションデータは、方位、速度、ヘディング等のうちの少なくとも一つを含むことができる。
【0106】
そのような実施形態で、位置推定信号(リアルタイム位置)を提供するその精密ナビゲーションシステム9のため、遠隔操作ビークルは、欠陥の位置を特定するため、検出された欠陥のフォローアップを行なうため、物体を操作するため、または浸漬された構造または海床の3次元再構築を実行するために、有利に使用することができることは理解されるであろう。
【0107】
遠隔操作ビークルを使用して、浸漬された構造または海床の3次元再構築を実行する場合、データ取得ユニットはソナーである。
【0108】
浸漬された構造を検査する場合、浸漬された構造はダム、取水構造、放水路、ストップログ、ドラフトチューブ、船殻、または橋杭.のうちの少なくとも一つとすることができる。
【0109】
ダムまたは橋杭の場合、亀裂、欠陥および岩−コンクリート界面を検査することができる。
【0110】
取水構造の場合、除塵機、門、導水路を検査することができる。
【0111】
放水路の場合、門、コンクリート、鋼、および桟橋を検査することができる。
【0112】
代替的に、水中から水力発電タービンを検査することができ、キャビテーション腐食損傷および亀裂を点検することができることは理解されるであろう。
【0113】
代替的に、船殻を検査して欠陥、異物、およびセキュリティ上の脅威のうちの少なくとも一つを検出することができることは理解されるであろう。
【0114】
作動アームを遠隔操作ビークルに接続することもでき、溶接、研削、清掃、および物体挟持のような水中タスクを実行することができる。ストップログを取り除くこともでき、損傷の位置を特定することができる。
【0115】
上述した本発明の実施形態は単なる例示のつもりである。したがって、本発明の範囲は、添付する請求の範囲の記載によってのみ限定されるつもりである。
【図面の簡単な説明】
【0116】
【図1】本発明の好適な実施形態に係る可視化システムを示すブロック図である。
【図2】ドップラ速度センサユニット14の位置ドリフトのカルマンフィルタ補償を示すグラフである。
【図3】音響位置遅延およびドップラ速度センサユニット14の障害の位置推定に対する影響を示すグラフである。
【図4】音響位置遅延およびドップラ速度センサユニット14の障害を補正した位置推定を示すグラフである。
【図5】ドップラ速度センサユニット14システムの位置に対する校正誤差の影響を示すグラフである。
【図6】位置推定に対するドップラ速度センサユニット14の障害の影響の実験結果を示すグラフである。
【図7】ドップラ速度センサユニット14の障害中のZ位置の推定の実験結果を示すグラフである。
【図8】ナビゲーションシステムを有利に使用する実施形態を示すブロック図である。
【関連出願の相互参照】
【0001】
これは本発明についての最初の出願である。
【技術分野】
【0002】
この発明は、ロボットの分野に関する。より正確には、この発明は水中の遠隔操作ビークルの位置をリアルタイムで決定する技術分野に関する。
【背景技術】
【0003】
水ダムのセキュリティプログラムの一環として、この数年間、水中遠隔操作ビークル(ROV)が開発されてきた。そのような遠隔操作ビークルは、水中環境で行われる様々な検査業務に使用することができる。ビークルは、ダム表面、岩とコンクリートの界面、タービン生産に関連する水中機器の検査、および主要な欠陥の位置および大きさを突き止めるために使用することが好ましい。
【0004】
当業熟練者は、長年を経てダムのコンクリートおよび他の浸漬された要素の劣化を修理する必要があることを理解している。したがって、復旧作業を準備するために、検査が行われる。清掃プロセスの前に取水口の障害物も点検される。
【0005】
遠隔操作ビークルがダムを検査するときに、例えば正確に配置された搭載カメラを使用して表面の亀裂または欠陥が識別され、遠隔操作ビークルは仮想環境で再生される。仮想環境は、ダムの完全な縮尺のグラフィカルモデル(例えばCote,J.、Lavallee,J.の「Augmented Reality Graphic, Interface for Upstream Dam Inspection」、SPIE、Telemanipulator and Telepresence Technologies II、フィラデルフィア、1995年10月に開示される通り)ならびに潜水艦の動的グラフィカルモデルから構成される。後で、保守要員が識別した欠陥を報告し、それらの展開を時間的に追跡し、復旧工事を実行する。そのような業務を効率的に実行するために、遠隔操作ビークルは、ダムに対するその厳密な位置をリアルタイムに出す、正確なナビゲーションシステムを装備しなければならない。最新技術のナビゲーションシステムは、位置を測定する場合のサンプリング速度のため、水中ビークルのためのリアルタイムナビゲーションを達成せず、システムの精度は通常充分に高くない。
【非特許文献1】Cote,J.、Lavallee,J.の「Augmented Reality Graphic, Interface for Upstream Dam Inspection」、SPIE、Telemanipulator and Telepresence Technologies II、フィラデルフィア、1995年10月
【0006】
水中の可視度が非常に低い環境で、またはダムの構造が非常に複雑である場合、遠隔操作ビークルの位置を特定するために、リアルタイム測位を達成するナビゲーションシステムが必要である。
【0007】
したがって、上で明らかにした欠点を克服する方法および装置が必要である。
【発明の開示】
【0008】
本発明の目的は、水中で動作する遠隔操作ビークルのリアルタイム測位を達成するための方法を提供することである。
【0009】
本発明の別の目的は、水中で動作する遠隔操作ビークルをリアルタイムで測位するための装置を提供することである。
【0010】
本発明の第一の側面によれば、水中を最高速度で移動することのできる遠隔操作ビークルの位置をリアルタイムで決定するための方法であって、第一サンプリング周波数でビークルの位置をサンプリングすること、第一サンプリング周波数とは独立した第二サンプリング周波数でビークルの瞬間速度をサンプリングすること、ここで二回の速度サンプリングの間に遠隔操作ビークルが移動する距離を二回の速度サンプリング間の期間で除算した結果が,最高速度より小さいかそれに等しいこと、およびビークルの位置情報およびビークル速度からビークルの位置をリアルタイムで決定することを含む方法が提供される。
【0011】
本発明の別の側面によれば、水中を最高速度で移動することのできる遠隔操作ビークルの位置をリアルタイムで決定するための装置であって、第一サンプリング周波数でビークルのサンプリングされた位置信号を提供する位置センサユニットと、第一サンプリング周波数とは独立した第二サンプリング周波数でサンプリングされた瞬間速度信号を提供する瞬間速度センサユニットと、ここで二回の速度サンプリングの間に遠隔操作ビークルが移動する距離を二回の速度サンプリング間の期間で除算した結果が,最高速度より小さいかそれに等しくなり、サンプリングされた位置信号およびサンプリングされた瞬間速度信号を受け取って前記ビークルの位置信号をリアルタイムで決定するナビゲーションユニットを備えた装置が提供される。
【0012】
本発明の別の側面によれば、物体の水中の位置をリアルタイムで決定するための方法であって、平均位置誤差を零にして第一の所定の周波数で物体の位置の推定をサンプリングすること、第一の所定の周波数より高い第二の所定の周波数で物体の速度および加速度のうちの少なくとも一つの推定をサンプリングして、結果的に零でない平均誤差で位置推定を得ること、および位置の推定を速度および加速度のうちの少なくとも一つの推定と組み合わせて、第二の所定の周波数で位置を提供することを含む方法が提供される。
【0013】
本発明の別の側面によれば、水中の物体の位置をリアルタイムで決定するための装置であって、零に等しい平均誤差を有し、第一の所定の周波数で物体の推定位置信号を提供するための位置センサユニットと、第一の所定の周波数より高い第二の所定の周波数で対応する瞬間速度信号および対応する瞬間加速度信号のうちの少なくとも一つを提供するための瞬間速度センサユニットおよび加速度センサユニットのうちの少なくとも一つと、推定位置信号と対応する瞬間速度信号および対応するサンプリングされた瞬間加速度信号のうちの少なくとも一つとを受け取り、かつ結合して、第二の所定の周波数で位置信号をリアルタイムで提供する位置提供ユニットとを備えた装置が提供される。
【0014】
本発明のさらなる特徴および利点は、添付の図面と組み合わせることで、以下の詳細な説明から明らかになるであろう。
【発明を実施するための最良の形態】
【0015】
添付の図面全体を通して、同様の特徴は同様の参照番号によって識別されている。
【好適な実施形態の詳細な説明】
【0016】
図1を参照すると、本発明の好適な実施形態に係るナビゲーションシステム9を示すブロック図が示されている。
【0017】
ナビゲーションシステムは、データ前処理ユニット20およびカルマンフィルタリングユニット22を備える。
【0018】
所定のセンサの障害/誤動作が検出された場合、該所定のセンサによって提供されるデータが処分されることは理解されるであろう。
【0019】
データ前処理ユニット20は、絶対データセンサユニット10に由来するX,Y,Z信号、相対データセンサユニット12によって提供される速度信号(Vx,Vy,Vz)および加速度信号Ax,AyおよびAz、ならびに方位データセンサユニット14によって提供される方位データ信号を受け取る。
【0020】
絶対データセンサユニット10は、零に等しい平均位置誤差で、第一サンプリング周波数で絶対位置データ信号を提供する。本発明の一実施形態では、絶対データセンサユニット10は位置センサユニットと呼ぶことができる。
【0021】
相対データセンサユニット12は、第二サンプリング周波数で相対データ信号を提供する。本発明の一実施形態では、相対データセンサユニット12を瞬間速度センサユニットと呼ぶことができることは理解されるであろう。実際、そのような相対データセンサユニット12は瞬間速度を提供し、結果的に零に等しくない平均誤差の位置推定をもたらす。
【0022】
第二サンプリング周波数が実質的に第一サンプリング周波数より高いことは理解されるであろう。
【0023】
絶対データセンサユニット10が、Z信号を提供する測深器ならびにXおよびY信号を提供する音響センサの少なくとも一つを含むことは理解されるであろう。
【0024】
さらに、相対データセンサユニット12が、Vx,VyおよびVz信号を提供するドップラセンサ、ならびにAx,AyおよびAz信号を提供する加速度計の少なくとも一つを含むことは理解されるであろう。
【0025】
さらに、方位データセンサユニット14が、Ωx、Ωy、およびΩz信号を提供するジャイロスコープセンサ、ΩxおよびΩy信号を提供する傾斜計、ならびにΩz信号を提供するコンパスのうちの少なくとも一つを含むことは理解されるであろう。
【0026】
データ前処理ユニット20は受け取ったデータを前処理し、処理されたデータをカルマンフィルタリングユニット22に提供する。
【0027】
下で説明する通り、カルマンフィルタリングユニット22は位置推定信号を提供する。
【0028】
本発明の好適な実施形態では、遠隔操作ビークルナビゲーションシステムは、ビークルの位置および移動に関する情報を提供する多数のセンサ30、ならびにナビゲーションユニット8を備える。好ましくは、位置推定を改善し、かつセンサの障害を克服するために、多数のセンサ30によって提供されるセンサデータは冗長である。
【0029】
下に開示する通り、ナビゲーションユニット8は多数のセンサ30によって提供されるセンサデータを使用し、ビークルの位置の最良可能な推定値を求める。下に開示する通り、好適な実施形態で、ナビゲーションユニット8はカルマンフィルタリング技術を使用して動作する。
【0030】
さらに詳しくは、ナビゲーションユニット8は、リアルタイム位置推定信号を提供するために、方位データセンサユニット14によって提供される方位信号を使用して、絶対データセンサユニット10によって提供される位置信号および相対データセンサユニット12によって提供される速度信号を併合する。
【0031】
好適な実施形態では、絶対データセンサユニット10は、Z信号を提供する測深器センサユニットと、XおよびY信号を提供する音響センサユニットとを含む。
【0032】
依然として本発明の好適な実施形態では、相対データセンサユニット12は、Vx,Vy,Vz信号を提供するドップラセンサユニットと、Ax,Ay,Az信号を提供する加速度計センサユニットとを含む。
【0033】
方位データセンサユニット14は、本発明の好適な実施形態では、Ωx,ΩyおよびΩz信号を提供するジャイロスコープセンサユニットと、ΩxおよびΩy信号を提供する傾斜計と、Ωz信号を提供するコンパスとを含む。センサ障害を回避するために、冗長性が有利に使用されることは理解されるであろう。
【0034】
ドップラセンサおよび音響センサを使用するナビゲーションシステムに関係する先行技術の研究は、1999年8月ニューハンプシャー州ダラムにおける無人無索潜水装置技術(Unmanned Untethered Submersible Technology)に関する第11回国際シンポジウムの会議録中のWhitcomb,L.L.、Yoerger,D.R.、Hanumant,Sの「Combined Doppler/LBL Based Navigation of Underwater Vehicles」、およびSpindel,R.C.、Porer,R.P.、Marquet,W.M.、Durham,J.L.の「A high-resolution pulse-Doppler underwater acoustic navigation system」IEEE Journal of Oceanic Engineering、第OE-1巻、第1号6〜13頁、1976年)に見ることができる。
【0035】
当業熟練者は、実際のシステムで、センサが必ずしも固定速度でデータを送信せず、データ取得がしばしば断続的になることを理解されるであろう。したがって、非同期データ配送および測定の遅延に対処するために追加の開発が行われる。測定の遅延は、測定が有効である瞬間と、それがナビゲーションユニットに利用可能になる瞬間との間の時間と定義することが好ましい。
【0036】
ナビゲーションユニットは、多数のセンサ30に由来するデータの様々なレートを受け入れるように適応させることが好ましいことは理解されるであろう。さらに、有効なデータだけが位置推定に使用されることを確実にするためにフィルタスイッチングプロセスを使用する。
【0037】
通常ジャイロスコープおよび加速度計センサユニットが、位置、線形速度および加速度、方位、ならびに角速度を提供することは理解されるであろう。しかし、本発明の好適な実施形態では、方位、角速度、および加速度だけがジャイロスコープおよび加速度計センサユニットによって提供される。
【0038】
前に開示した通り、ナビゲーションシステム9の多数のセンサは、潜水艦に搭載されたソナートランスデューサのX,Y,Z信号を提供する音響センサユニットを含む。
【0039】
音響位置センサユニットによって提供される位置信号および測深器センサユニットによって提供されるZ信号が一つに結合されて、絶対位置信号をもたらすことは理解されるであろう。測深器センサユニットはずっと正確、高速、かつ信頼できる測定を提供するので、本発明の好適な実施形態では、Z信号が、音響位置センサユニットからではなく、測深器センサユニットから収集されることは理解されるであろう。
【0040】
上述の通り、ナビゲーションシステム9の多数のセンサ30の相対データセンサユニット12はさらに、一般的にDVLとして識別されるドップラ速度センサユニットを含み、それはビークルのX,Y,Z線形速度信号を提供する。ビークルの線形速度信号の積分により、位置X,Y,およびZが得られる。
【0041】
好適な実施形態では、多数のセンサ30は以下の特徴を有する。
【表1】
【0042】
カルマンフィルタは、Brown,R.G.、Hwang,P.Y.C.の「Introduction to Random Signals and Applied Kalman Filtering」第三版、John Wiley & Sons、1997年によくカバーされている。当業熟練者には周知の通り、カルマンフィルタは、反復および再帰プロセスに基づく最適線形推定量を使用する。
【0043】
より正確には、カルマンフィルタは、システムの状態の最適推定値を再帰的に求める。一般的に、3次元空間に展開するビークルの状態を記述するベクトルは、次のように表わすことができる。
【0044】
x=[xyzx*y*z*αβγΩxΩyΩz]′
【0045】
ここで、xyzはビークルの位置座標であり、x*y*z*は対応する速度であり、αβγはビークルの方位を記述するオイラー角であり、ΩxΩyΩzは角速度である。
【0046】
好適な実施形態では、カルマンフィルタリングユニット22で使用されるカルマンフィルタは、ビークルの位置のみに適用される。Xベクトルは、x=[xyzx*y*z*]′と定義される。
【0047】
カルマンフィルタは、次の状況の一つが発生したときに、ビークルの位置の新しい推定値を生成する。音響位置センサユニットに由来する新しい位置信号が得られた場合には、カルマンフィルタリングユニット22のカルマンフィルタは、新しい位置信号により新しい推定値を計算する(測定更新プロセス)。一定量の時間dt前に新しい位置信号が得られない場合には、カルマンフィルタは、位置および速度の以前の情報に基づいて現在の位置を更新する(時間更新プロセス)。
【0048】
次式1および2によって記述されるように、X(k−1)と表記される、以前の反復からの最適推定値は、状態遷移行列Aを通して時間的に投影され、ノイズの多い入力U(k)(相対データセンサユニット)は、入力を状態に関連させる行列Bを通してシステムに供給される。
【0049】
Ppriori=A・P・A′+Q (1)
【0050】
X(k)=A・X(k−1)+B・U(k) (2)
【0051】
方程式2で、状態Xはビークルの線形位置であり、Uは線形速度センサからの入力である。行列AおよびBはシステムの運動学を反映する。
【0052】
方程式1は、推定状態Xの誤差の分散を表わす誤差共分散行列Pを時間的に投影する。Qは、測定値U(k)からのプロセスノイズに関連する共分散行列である。
【0053】
このプロセスは式3〜5によって形式化され、そこで絶対センサユニット10に由来する直接ノイズ状態測定値Z(k)を以前の状態の推定値X(kpast)と比較して補正値を出し、この以前の推定値に適応して新しい推定値X(k)を得る。行列Hは測定値を状態に関連付ける。
【0054】
K=Ppriori・H′・(H・Ppriori・H′+R)-1 (3)
【0055】
「Xcorrige(kpast)=X(kpast)+K・(Z−H・X(kpast)) (4)
【0056】
P=(I−K・H)・Ppriori (5)
【0057】
各推定(以前の推定値X(kpast)および測定値Z(k))の重要性は、カルマン利得Kによって決定される。
【0058】
カルマン利得Kは次に、プロセスノイズ共分散(間接測定値)および測定ノイズ共分散(直接測定値)をそれぞれ表わす行列QおよびRによって順番に決定される。カルマン利得Kは0から1の間の値を取り、0は間接測定値のみの使用を表わし、1は直接測定値のみを表わす。
【0059】
方程式1で修正された誤差共分散行列Pは、測定更新プロセスを反映するために、方程式5で再び補正され続けると、方程式4のZ(k)は、位置センサに由来する測定値を表わし、ZとXとの間には直接的対応が存在するので、Hは[1 0]に等しい。
【0060】
速度を積分して位置が得られるので、ドップラ速度センサユニットに由来するノイズは反復の都度、累積される。この結果、発散位置誤差が生じ、したがって音響位置センサユニットは単独では、図2に示すように長時間にわたって使用不能になる。音響位置センサユニットのような典型的直接位置センサの位置誤差は重要である。これらのシステムは中断する傾向があり、短時間の大きいノイズレベルを持つ。しかし、それらの位置推定値は長時間にわたってずれることはない。誤差は零平均に近く、それらの長期運転の信頼性を高める。
【0061】
音響位置センサユニットおよびドップラ速度センサユニットの両方を組み合わせたカルマンフィルタリングユニット22から得られる位置推定信号について、シミュレーションを行なった。シミュレーションの結果を図2に示す。
【0062】
図2に示す通り、該組合せは、音響位置センサユニットおよびドップラ速度センサユニットの両方をうまく利用し、より正確には、音響位置センサユニットからのドリフトが無いこと、およびドップラ速度センサユニットによって提供される速度信号の平滑性を利用している。
【0063】
しかし図2におけるシミュレーションの結果を生じるために使用した基本的カルマンフィルタリングユニット22が、用途によって要求される精度を満たさないことは、理解されるであろう。第一に、音響位置センサユニットによって提供される位置信号は、それが利用できるようになったときには有効ではなく、特定の量の時間だけ前に有効である。第二に、センサ障害が発生した場合、それを検出しなければならず、カルマンフィルタリングユニット22は、障害のあるセンサによって提供されたデータを新しい推定値に組み込まないようにしなければならない。最後に、多数のセンサの更新率はセンサ毎に異なるかもしれない。例えばビークルがトランスポンダビーコンから遠い場合、音響信号はトランスポンダビーコンまでの距離に依存するので、測定はより多くの時間がかかる。
【0064】
本発明の好適な実施形態では、各センサに由来するデータが好ましくは、カルマンフィルタリングユニット22に送る前に多少の変換が必要であることは理解されるであろう。
【0065】
より正確には、ビークルの運動学モデルは、固定フレームと呼ばれる慣性系に対するその運動を記述する。便宜上、その質量中心に対するビークルの運動方程式が作成される。局所として識別される基準フレームが質量中心に付加され、その方位は慣性主軸に対応する。したがって、固定フレームに表わされる固定フレームに対する局所フレームの位置および速度を記載するために、多数のセンサ30から得られる位置信号および速度信号を変換することが好ましい。
【0066】
好適な実施形態では、そのような処理は、データ前処理ユニット20によって実行される。
【0067】
音響位置センサユニットによって提供される位置信号は、次のように処理される。
【0068】
[FIXEPLOCAL]FIXE=[FIXEPPINGER]FIXE−rot[FIXELOCAL][LOCALPPINGER]LOCAL
【0069】
ここで[FIXEPLOCAL]FIXEは、固定フレームに対するビークルの質量中心の位置ベクトルであり、[FIXEPPINGERR]FIXEは固定フレームに対するビークルのトランスポンダ(音響システムのエミッタ部、およびしたがってその位置が音響システムによって測定されるポイント)の位置ベクトルであり、rot[FIXELOCAL]は過去に局所フレームから固定フレームへ移動するための回転行列である。行列は、DQI(rot[FIXE,DQI])によって提供される方位、およびビークル(rot[LOCAL,DQI])上のその方位を使用して構築される。
【0070】
[LOCALPPINGER]LOCALは、ビークルの質量中心に対するトランスポンダの位置ベクトルであり、それはビークルのフレーム内で測定される。
【0071】
ドップラ速度センサユニットによって提供される速度信号は、次のように処理される。
【0072】
[FIXEVLOC]FIXE=ROT[FIXE,DVL][FIXEVDVL]DVL-[FIXEΩLOC]FIXEΛ〔ROT[FIXE,LOC][LOCPDVL]LOC〕
ここで、ROT[FIXE,DVL]は固定フレームに対するドップラ速度センサユニットの方位を記述する回転行列である。
【0073】
[FIXEVDVL]DVLは、ドップラ速度センサユニットを使用して得られる。
【0074】
[FIXEΩLOC]FIXEは、ジャイロスコープセンサユニットから得られる局所フレームの角速度である。
【0075】
[LOCPDVL]LOCは、局所フレームに表わされる局所フレームに対するドップラ速度センサユニットの位置ベクトルである。
【0076】
前に説明したとおり、センサデータは、異なりかつ変化するレートで多数のセンサ30によって提供される。
【0077】
センサフュージョンアルゴリズムは、どの信号が提供されるかに応じて適切な推定手順に繰り替えることにより、非同期信号を受け入れることは理解されるであろう。例えばドップラ速度センサユニットは、位置信号が音響位置センサユニットによって提供されるレートより約12倍高いレートで速度信号を提供する。
【0078】
ドップラ速度センサユニットおよび音響位置センサユニットが新しいデータを提供するときに、カルマンフィルタユニット22が使用される。しかし、12回のうち11回はドップラ速度センサユニットが速度信号を提供するだけであり、したがって位置更新を実行するために速度信号の単純な積分が使用され、そのような積分はカルマンフィルタリングユニット22で実行される。
【0079】
音響位置センサユニットによって位置信号が提供されるときに、タイムスタンプが記録される。タイムスタンプの値は、実際の時間から校正遅延を引いたものである。このタイムスタンプは位置信号に関連する。
【0080】
二つの位置信号間の位置推定値は、メモリに維持される。新しい位置信号が音響位置センサユニットによって提供されると、アルゴリズムは、この新しいデータに関連付けられるタイムスタンプによって示される時間にメモリに記録された位置推定値に対し補正を実行する。次いで、ドップラ速度センサユニットによって提供された速度信号を使用して、この時間から実際の時間に位置更新が実行される。換言すると、方程式4の位置更新X(kpast)は新しい位置推定値と置換され、次いで、方程式2を使用して、過去のこの新しい位置推定値から実際の時間まで速度信号を積分することによって位置が更新される。この積分位相は、音響位置センサユニットによって提供される新しい位置信号が利用可能になるまで続く。好適な実施形態では、そのような処理はカルマンフィルタリングユニット22によって実行される。
【0081】
ビークルの動力学モデルおよび対応するコントローラにより、データが生成される。図2およびそれ以降の図で、モデルの実際の位置は仮想潜水艦信号として識別される。音響位置センサユニットによって提供される位置信号を生成するために、上に示した通り、実験から得られた分散を持つホワイトノイズが仮想潜水艦信号位置に付加される。
【0082】
シミュレーションのドップラ速度センサユニットによって提供される速度信号は、モデルの速度から得られる。音響位置センサユニットによって提供される位置信号は「V測地信号」として識別され、ドップラ速度センサユニットは「DVL単独測地」として識別される一方、カルマンフィルタリングユニットによって提供される位置推定値は「カルマン位置信号」として識別される。
【0083】
図2に示される第一シミュレーションの結果は、カルマンフィルタリングユニット22によって提供されるカルマン位置信号を示す。音響位置センサユニットを使用して提供される位置信号、およびデータドップラ速度センサユニットによって提供される速度信号を示す。
【0084】
ビークルは零位置で始動し、次いで−2mの第一目標に到達する。時間t=500秒で、ビークルは目標位置0mに達し、時間t=1000秒で−2m目標に戻る。シミュレーションの目的は、カルマンフィルタリングユニット22の適切な実行を検証することである。分かりやすくするために、音響位置センサユニットによって提供される位置信号はこのグラフには示されない。「DVL単独位置信号」によって示されるドップラ速度センサユニットの位置ドリフトは非常に緩慢であり、誤差は1時間のシミュレーション後にようやく有意になる。このグラフに描画されたデータは、4時間のシミュレーション後に開始された30分のシミュレーションを表わす。
【0085】
このシミュレーションでは、音響位置センサユニットによって提供される位置信号が瞬時に(つまり遅延無く)生成され、このシミュレーションではシステムの校正誤差およびセンサの障害が無いことは理解されるであろう。
【0086】
図3を参照すると、音響位置センサユニットの遅延およびドップラ速度センサユニットの障害の影響を開示するように意図されたシミュレーションを示すグラフが示されている。
【0087】
音響位置センサユニットに対し、5秒の遅延が設定されている。また、音響位置センサユニットによって提供される位置信号の位置推定値に対する影響を増幅するために、音響位置センサユニットに関連する分散は0.002に設定される。最初の10秒間の遅延の効果は、カルマン位置信号曲線が仮想潜水艦信号曲線に遅れて現れることである。
【0088】
ドップラ速度センサユニット14の障害は11秒に発生し、そこでカルマンDVLアクティブ信号曲線は1から零レベルに変化し、12秒で再びアクティブになる。障害時間中に、カルマンフィルタリングユニット22は、ドップラ速度センサユニットの入力を零値とみなす。音響位置センサユニットの遅延およびドップラ速度センサユニットの障害は、このナビゲーションシステムに内在している。
【0089】
シミュレーションの開始から20秒後に、音響位置センサユニットの遅延およびドップラ速度センサユニットの障害の累積誤差は約20cmである。
【0090】
図4を参照すると、音響位置センサユニットの遅延およびドップラ速度センサユニットの障害に対して行われる補正を開示するさらなるシミュレーションが示されている。音響位置センサユニットの遅延に対して適用される補正の説明は、前に開示されている。ドップラ速度センサユニットの障害の場合に適用される補正は、このアルゴリズムでは非常に単純であり、短時間に対してうまく働く。アルゴリズムは最後の有効な速度信号を維持し、それにより時間更新手順を実行する。次いで、有効速度は特定の百分率で低減され、結果が次の時間更新のための新しい有効速度になる。
【0091】
より長い時間の場合、アルゴリズムは時間更新手順の実行を停止し、コントローラは自動から手動モードに切り替える。
【0092】
シミュレーションの最初の10秒間、位置推定値曲線(つまり「カルマン位置信号」曲線)はモデルの位置曲線(つまり「仮想潜水艦信号」曲線)に従う。これは、前のシミュレーションに比較して改善を表わす。最初のドップラ速度センサユニットの障害は、「カルマンDVLアクティブ信号」曲線によって示されるように、11秒に発生する。ビークルの位置に対して位置推定値のずれが依然として存在するが、ドップラ速度センサユニットの障害によって生じる位置誤差は、前のシミュレーションで得られたものに比較して小さい。シミュレーションの開始から20秒後、遅延およびドップラ速度センサユニットの障害の累積誤差は5cm未満である。他方、25秒に始まる障害のように、ドップラ速度センサユニットの障害が5秒を超えて続く場合、ドップラ速度センサユニットの障害中にビークルはその速度方向を変更するので、最後の有効速度を使用すると重要な誤差が生じる。しかし、時間が経過するにつれて、ビークルが静止している間に、音響位置センサユニットの影響下で、位置推定値曲線はビークル位置曲線に少しずつ近づいていく。
【0093】
ドップラ速度センサユニットシステムによって提供される速度信号は、ビークル上の一つの特定の点の線形速度である。速度に適用される変換は、角速度および局所フレームに対するドップラ速度センサユニットシステムの中心の位置座標に依存する。この変換は必要であり、校正を正確に行なわなければならない。図5に示す次のシミュレーションで、ドップラ速度センサユニットは局所フレームに対して(−25cm,0,25cm)に配置される。しかし、XおよびZ軸に対して5cmの誤差が生じるので、この変換は、ドップラ速度センサユニットシステムが(−20cm,0,−20cm)に配置されるとみなす。位置ドリフトは角変位に依存し、図5から、ドップラ速度センサユニットの位置の小さい誤差がビークルの位置にかなりの誤差を生じることが観察できる。
【0094】
測深器センサユニットはZ座標を提供するために使用され、シミュレーションで使用された音響位置センサユニットに取って代わる。しかし、シミュレーション結果の再現より、前述した挙動の観察の方が興味深い。後続の図では、絶対センサは測深器であり、対応する曲線は「測深器位置信号」として識別される。測深器センサユニットは正確であり、カルマンフィルタリングユニット22から得られる曲線との比較点を確率するための基準とみなすことができる。ドップラ速度センサユニットによって提供される速度信号の単純な積分によって得られる位置曲線は描画されていない。しかし、ドップラ速度センサユニットによって提供される速度信号は、カルマンフィルタリングユニット22で使用される唯一のデータであるので、カルマン位置信号曲線は、ドップラ速度センサユニットを使用して計算された位置を表わす。「カルマンDVLアクティブ信号」曲線は、ドップラ速度センサユニットがアクティブ(アップレベル)であるか否か(ダウンレベル)を示す。図6で、ドップラ速度センサユニットシステムは何回も障害を発生している。短時間の障害の場合、前の速度の使用により、カルマンフィルタリングユニット22はその曲線を測深器センサユニットの曲線上に維持することができる。しかし、ドップラ速度センサユニットが長時間ダウンする場合、カルマンフィルタリングユニットは受け入れられる結果をもたらさない。図6に22秒から始まる状況の一例がある。
【0095】
Z座標について、測深器センサユニットはかなり優れた精度を有し、かつ比較的高い帯域幅を有するので、アルゴリズムは、ドップラ速度センサユニットの障害中に、図7に示すように前の有効速度を使用して時間更新を実行する代わりに、その信号を使用する。
【0096】
カルマンフィルタリングユニットを使用して、音響位置センサユニット、測深器センサユニット、およびドップラ速度センサユニットから受け取ったデータを併合するナビゲーションシステムを開示した。音響位置センサユニットによって提供される位置信号からの遅延およびドップラ速度センサユニットの障害の位置推定値に対する影響を、シミュレーション結果によって浮き彫りにした。カルマンフィルタリングユニット22のアルゴリズムは、音響位置センサユニットの固定時間遅延の補正を含み、シミュレーション結果は位置推定値のかなりの改善を示している。
【0097】
しかし、時間遅延が固定されていないことは当業熟練者には周知である。したがって、この開発の完全な利益を得るために、この時間遅延のモデルを作成することができる。ドップラ速度センサユニットの短い障害中に、ナビゲーションアルゴリズムは、欠如した情報を補償する。局所フレームに対する座標変換を精密に実行するために、ビークル上の位置システムの位置および方位を正確に測定することが最も重要であることは理解されるであろう。
【0098】
図8を参照すると、ナビゲーションシステム9を遠隔操作潜水艦でいかに有利に使用することができるかを示すブロック図が示されている。
【0099】
該システムは、ナビゲーションシステム9、仮想環境生成ユニット40、ユーザインタフェース42、処理ユニット44、メモリユニット46、およびデータ取得ユニット48を含む。
【0100】
仮想環境生成ユニット40は、遠隔操作潜水艦が下述するように動作する仮想環境を生成する。
【0101】
ユーザインタフェース42は、生成された仮想環境をオペレータに対して表示するために使用される。ユーザインタフェース42は、遠隔操作潜水艦を制御するためにも使用することができる。
【0102】
データ取得ユニット48は、取得データ信号を提供する。データ取得ユニット48は、カメラ、ソナー、およびレーザのうちのいずれか一つとすることができる。データ取得ユニット48は、遠隔操作ビークルの周囲で収集された関連情報を提供するために使用される。
【0103】
処理ユニット44は取得データ信号を受け取り、受け取った取得データ信号を処理し、処理したデータを仮想環境生成ユニット40に提供する。
【0104】
メモリユニット46は、処理されたデータの少なくとも一部分を格納するために使用することができる。
【0105】
仮想環境生成ユニットは、位置推定信号および処理されたデータ信号を併合して、仮想環境を生成する。生成された仮想環境は、関心のある周囲の物体と共に遠隔操作ビークルの3次元ビューであることが好ましい。関心のある物体は、データ取得ユニット48を使用して検出することが好ましい。代替的に、関心のある物体は、仮想環境生成ユニット40によって生成された仮想環境に、オペレータがユーザインタフェース42を使用して入力することもできる。仮想環境は、遠隔操作ビークルに関連するナビゲーションデータをさらに含むことができることは理解されるであろう。そのようなナビゲーションデータは、方位、速度、ヘディング等のうちの少なくとも一つを含むことができる。
【0106】
そのような実施形態で、位置推定信号(リアルタイム位置)を提供するその精密ナビゲーションシステム9のため、遠隔操作ビークルは、欠陥の位置を特定するため、検出された欠陥のフォローアップを行なうため、物体を操作するため、または浸漬された構造または海床の3次元再構築を実行するために、有利に使用することができることは理解されるであろう。
【0107】
遠隔操作ビークルを使用して、浸漬された構造または海床の3次元再構築を実行する場合、データ取得ユニットはソナーである。
【0108】
浸漬された構造を検査する場合、浸漬された構造はダム、取水構造、放水路、ストップログ、ドラフトチューブ、船殻、または橋杭.のうちの少なくとも一つとすることができる。
【0109】
ダムまたは橋杭の場合、亀裂、欠陥および岩−コンクリート界面を検査することができる。
【0110】
取水構造の場合、除塵機、門、導水路を検査することができる。
【0111】
放水路の場合、門、コンクリート、鋼、および桟橋を検査することができる。
【0112】
代替的に、水中から水力発電タービンを検査することができ、キャビテーション腐食損傷および亀裂を点検することができることは理解されるであろう。
【0113】
代替的に、船殻を検査して欠陥、異物、およびセキュリティ上の脅威のうちの少なくとも一つを検出することができることは理解されるであろう。
【0114】
作動アームを遠隔操作ビークルに接続することもでき、溶接、研削、清掃、および物体挟持のような水中タスクを実行することができる。ストップログを取り除くこともでき、損傷の位置を特定することができる。
【0115】
上述した本発明の実施形態は単なる例示のつもりである。したがって、本発明の範囲は、添付する請求の範囲の記載によってのみ限定されるつもりである。
【図面の簡単な説明】
【0116】
【図1】本発明の好適な実施形態に係る可視化システムを示すブロック図である。
【図2】ドップラ速度センサユニット14の位置ドリフトのカルマンフィルタ補償を示すグラフである。
【図3】音響位置遅延およびドップラ速度センサユニット14の障害の位置推定に対する影響を示すグラフである。
【図4】音響位置遅延およびドップラ速度センサユニット14の障害を補正した位置推定を示すグラフである。
【図5】ドップラ速度センサユニット14システムの位置に対する校正誤差の影響を示すグラフである。
【図6】位置推定に対するドップラ速度センサユニット14の障害の影響の実験結果を示すグラフである。
【図7】ドップラ速度センサユニット14の障害中のZ位置の推定の実験結果を示すグラフである。
【図8】ナビゲーションシステムを有利に使用する実施形態を示すブロック図である。
【特許請求の範囲】
【請求項1】
物体の水中の位置をリアルタイムで決定するための方法であって、
零に等しい平均位置誤差で第一の所定の周波数で前記物体の前記位置の推定をサンプリングすること、
前記第一の所定の周波数より高い第二の所定の周波数で、前記物体の速度および加速度のうちの少なくとも一つの推定をサンプリングして、結果的に零でない平均誤差で位置推定を得ること、および
前記位置の前記推定を速度および加速度のうちの少なくとも一つの前記推定と組み合わせて、前記第二の所定の周波数で前記位置を提供すること、を含む方法。
【請求項2】
前記結合は、前記位置が推定される第一時間と前記推定位置が利用可能になる第二時間との間の遅延を補償することを含む、請求項1に記載の方法。
【請求項3】
前記結合は、前記物体の前記位置の前記推定に対する第一加重および前記速度および前記加速度のうちの少なくとも一つの前記推定に対する第二加重を関連付けることを含む、請求項1に記載の方法。
【請求項4】
前記位置の前記推定に対する前記第一加重および前記速度および前記加速度の前記推定のうちの前記少なくとも一つに対する第二加重の前記関連付けが、カルマンフィルタリングを使用することを含む、請求項3に記載の方法。
【請求項5】
前記位置の前記推定は音響位置センサユニットを使用してもたらされる、請求項1ないし4のいずれか一項に記載の方法。
【請求項6】
前記音響位置センサユニットはX,Y位置信号を提供し、さらに測深器センサユニットはZ位置信号を提供する、請求項5に記載の方法。
【請求項7】
前記速度の推定が提供され、さらに前記速度の前記推定の前記サンプリングはドップラ速度センサユニットを使用することを含む、請求項1ないし6のいずれか一項に記載の方法。
【請求項8】
前記加速の推定が提供され、さらに前記加速の前記推定の前記サンプリングはジャイロスコープおよび加速度計センサユニットを使用することを含む、請求項1ないし6のいずれか一項に記載の方法。
【請求項9】
水中の物体の位置をリアルタイムで決定するための装置であって、
第一の所定の周波数で前記物体の推定位置信号を提供するための、零に等しい平均誤差を有する位置センサユニットと、
前記第一の所定の周波数より高い第二の所定の周波数で、対応する瞬間速度信号および対応する瞬間加速度信号のうちの少なくとも一つを提供するための瞬間速度センサユニットおよび加速度センサユニットのうちの少なくとも一つと、
前記推定位置信号ならびに対応する瞬間速度信号および対応するサンプリングされた瞬間加速度信号のうちの少なくとも一つを受け取りかつ結合して、前記第二の所定の周波数で位置信号をリアルタイムで提供する位置提供ユニットと、を備えた装置。
【請求項10】
前記位置提供ユニットは、カルマンフィルタリングユニットを含み、前記推定位置信号ならびに前記瞬間速度信号および前記瞬間加速度信号のうちの前記少なくとも一つを受け取り、前記物体の前記位置信号をリアルタイムで提供する、請求項9に記載の装置。
【請求項11】
前記位置センサユニットは音響位置センサユニットを含む、請求項9および10のいずれか一項に記載の装置。
【請求項12】
前記音響位置センサユニットはX,Y位置信号を提供し、さらに前記装置はZ位置信号を提供する測深器センサユニットをさらに含む、請求項10に記載の装置。
【請求項13】
前記瞬間速度センサユニットはドップラ速度センサユニットを含む、請求項9ないし12のいずれか一項に記載の装置。
【請求項14】
前記瞬間速度センサユニットはジャイロスコープおよび加速度センサユニットを含む、請求項9ないし12に記載の装置。
【請求項15】
前記物体がビークルを含み、浸漬された構造の検査を実行するため、および仮想環境における前記検査の結果をさらに提供するために、データ取得ユニットによって提供される前記浸漬された構造の取得データ信号と共に、前記ビークルの前記決定された位置をリアルタイムで使用することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項16】
前記浸漬された構造はダムおよび橋杭の少なくとも一つを含み、さらに、亀裂、岩−コンクリート界面、および欠陥の少なくとも一つを検査するために前記検査が実行される、請求項15に記載の方法。
【請求項17】
前記浸漬された構造は取水構造を含み、さらに、除塵機、門、および導水路のうちの少なくとも一つを点検するために前記検査が実行される、請求項15に記載の方法。
【請求項18】
前記浸漬された構造は放水路を含み、さらに、門、コンクリート、および桟橋のうちの少なくとも一つを点検するために前記検査が実行される、請求項15に記載の方法。
【請求項19】
前記検査を実行した後にタスクを実行するために、前記ビークルに固定された作動アームを操作することをさらに含む、請求項15に記載の方法。
【請求項20】
前記タスクは物体の溶接、研削、清掃、および挟持のうちの少なくとも一つを含む、請求項19に記載の方法。
【請求項21】
前記物体の前記決定された位置をリアルタイムで使用して、ストップログおよびドラフトチューブのうちの少なくとも一つの検査を実行することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項22】
キャビテーション腐食損傷および亀裂のうちの少なくとも一つを検出するため、水力発電タービンの検査を実行するために、前記物体の前記決定された位置をリアルタイムで使用することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項23】
欠陥、異物、およびセキュリティ上の脅威のうちの少なくとも一つを検出するため、船殻の検査を実行するために、前記物体の前記決定された位置をリアルタイムで使用することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項1】
物体の水中の位置をリアルタイムで決定するための方法であって、
零に等しい平均位置誤差で第一の所定の周波数で前記物体の前記位置の推定をサンプリングすること、
前記第一の所定の周波数より高い第二の所定の周波数で、前記物体の速度および加速度のうちの少なくとも一つの推定をサンプリングして、結果的に零でない平均誤差で位置推定を得ること、および
前記位置の前記推定を速度および加速度のうちの少なくとも一つの前記推定と組み合わせて、前記第二の所定の周波数で前記位置を提供すること、を含む方法。
【請求項2】
前記結合は、前記位置が推定される第一時間と前記推定位置が利用可能になる第二時間との間の遅延を補償することを含む、請求項1に記載の方法。
【請求項3】
前記結合は、前記物体の前記位置の前記推定に対する第一加重および前記速度および前記加速度のうちの少なくとも一つの前記推定に対する第二加重を関連付けることを含む、請求項1に記載の方法。
【請求項4】
前記位置の前記推定に対する前記第一加重および前記速度および前記加速度の前記推定のうちの前記少なくとも一つに対する第二加重の前記関連付けが、カルマンフィルタリングを使用することを含む、請求項3に記載の方法。
【請求項5】
前記位置の前記推定は音響位置センサユニットを使用してもたらされる、請求項1ないし4のいずれか一項に記載の方法。
【請求項6】
前記音響位置センサユニットはX,Y位置信号を提供し、さらに測深器センサユニットはZ位置信号を提供する、請求項5に記載の方法。
【請求項7】
前記速度の推定が提供され、さらに前記速度の前記推定の前記サンプリングはドップラ速度センサユニットを使用することを含む、請求項1ないし6のいずれか一項に記載の方法。
【請求項8】
前記加速の推定が提供され、さらに前記加速の前記推定の前記サンプリングはジャイロスコープおよび加速度計センサユニットを使用することを含む、請求項1ないし6のいずれか一項に記載の方法。
【請求項9】
水中の物体の位置をリアルタイムで決定するための装置であって、
第一の所定の周波数で前記物体の推定位置信号を提供するための、零に等しい平均誤差を有する位置センサユニットと、
前記第一の所定の周波数より高い第二の所定の周波数で、対応する瞬間速度信号および対応する瞬間加速度信号のうちの少なくとも一つを提供するための瞬間速度センサユニットおよび加速度センサユニットのうちの少なくとも一つと、
前記推定位置信号ならびに対応する瞬間速度信号および対応するサンプリングされた瞬間加速度信号のうちの少なくとも一つを受け取りかつ結合して、前記第二の所定の周波数で位置信号をリアルタイムで提供する位置提供ユニットと、を備えた装置。
【請求項10】
前記位置提供ユニットは、カルマンフィルタリングユニットを含み、前記推定位置信号ならびに前記瞬間速度信号および前記瞬間加速度信号のうちの前記少なくとも一つを受け取り、前記物体の前記位置信号をリアルタイムで提供する、請求項9に記載の装置。
【請求項11】
前記位置センサユニットは音響位置センサユニットを含む、請求項9および10のいずれか一項に記載の装置。
【請求項12】
前記音響位置センサユニットはX,Y位置信号を提供し、さらに前記装置はZ位置信号を提供する測深器センサユニットをさらに含む、請求項10に記載の装置。
【請求項13】
前記瞬間速度センサユニットはドップラ速度センサユニットを含む、請求項9ないし12のいずれか一項に記載の装置。
【請求項14】
前記瞬間速度センサユニットはジャイロスコープおよび加速度センサユニットを含む、請求項9ないし12に記載の装置。
【請求項15】
前記物体がビークルを含み、浸漬された構造の検査を実行するため、および仮想環境における前記検査の結果をさらに提供するために、データ取得ユニットによって提供される前記浸漬された構造の取得データ信号と共に、前記ビークルの前記決定された位置をリアルタイムで使用することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項16】
前記浸漬された構造はダムおよび橋杭の少なくとも一つを含み、さらに、亀裂、岩−コンクリート界面、および欠陥の少なくとも一つを検査するために前記検査が実行される、請求項15に記載の方法。
【請求項17】
前記浸漬された構造は取水構造を含み、さらに、除塵機、門、および導水路のうちの少なくとも一つを点検するために前記検査が実行される、請求項15に記載の方法。
【請求項18】
前記浸漬された構造は放水路を含み、さらに、門、コンクリート、および桟橋のうちの少なくとも一つを点検するために前記検査が実行される、請求項15に記載の方法。
【請求項19】
前記検査を実行した後にタスクを実行するために、前記ビークルに固定された作動アームを操作することをさらに含む、請求項15に記載の方法。
【請求項20】
前記タスクは物体の溶接、研削、清掃、および挟持のうちの少なくとも一つを含む、請求項19に記載の方法。
【請求項21】
前記物体の前記決定された位置をリアルタイムで使用して、ストップログおよびドラフトチューブのうちの少なくとも一つの検査を実行することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項22】
キャビテーション腐食損傷および亀裂のうちの少なくとも一つを検出するため、水力発電タービンの検査を実行するために、前記物体の前記決定された位置をリアルタイムで使用することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【請求項23】
欠陥、異物、およびセキュリティ上の脅威のうちの少なくとも一つを検出するため、船殻の検査を実行するために、前記物体の前記決定された位置をリアルタイムで使用することをさらに含む、請求項1ないし8のいずれか一項に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2008−513730(P2008−513730A)
【公表日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願番号】特願2006−527244(P2006−527244)
【出願日】平成16年9月23日(2004.9.23)
【国際出願番号】PCT/CA2004/001734
【国際公開番号】WO2005/029001
【国際公開日】平成17年3月31日(2005.3.31)
【出願人】(506095984)
【氏名又は名称原語表記】HYDRO−QUEBEC
【住所又は居所原語表記】Technologie et Developpement Industriel, Direction Valorisation, 1000, rue Sherbrooke Est, 16e etage, Montreal, Quebec H3A 3G4, CANADA
【Fターム(参考)】
【公表日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願日】平成16年9月23日(2004.9.23)
【国際出願番号】PCT/CA2004/001734
【国際公開番号】WO2005/029001
【国際公開日】平成17年3月31日(2005.3.31)
【出願人】(506095984)
【氏名又は名称原語表記】HYDRO−QUEBEC
【住所又は居所原語表記】Technologie et Developpement Industriel, Direction Valorisation, 1000, rue Sherbrooke Est, 16e etage, Montreal, Quebec H3A 3G4, CANADA
【Fターム(参考)】
[ Back to top ]