
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
政府権益声明
米国政府は、米国海軍および防衛高等研究企画庁(DARPA)によって与えられた契約番号N66001−07−C−2004のもと、本発明の一定の権利を有し得る。
【技術分野】
【0002】
本明細書で開示する実施形態は、水中ナビゲーションの少なくとも1の方法およびシステムに関する。より詳細には、本明細書で論じる水中ナビゲーションは、水中の地形、または継続的かつ正確な位置決定および深度測定情報を必要とする任意の同様の地形を調査しながら、位置および速度を測定する方法に関する。例えば、本明細書で論じるナビゲーションの方法を使用するシステムは、個人のダイバまたは1もしくは複数の形態の水中車両に適した正確かつ安価なナビゲーションおよび深度測定機能を提供する。
【背景技術】
【0003】
現在、水中ナビゲーションシステムの様々な実装形態が存在する。例えば、3以上の信号ビームを有するドップラソナー装置が、「Janus;ヤヌス」構成で動作可能である。典型的なヤヌス構成では、各信号ビームからの情報が数学的に合成され、ビームを基準とするドップラ速度測定値が直交基準座標系に変換される。しかし、このタイプのナビゲーションは、ナビゲーション・ドリフト、外部環境条件、および、放置された場合に不正確な位置、深度または距離の推定値をもたらす他のタイプの測定誤差の影響を受けやすい。例えば、単一の速度成分を計算するために2以上のビームが組み合わされるので、信号ビームの速度測定で生じる誤差が容易に検出可能ではなく、得られる基準座標系の速度の精度がより低くなる。さらに、ドップラソナーの速度帯域幅の制限は、典型的には信号ビームの消失または歪曲により、誤った速度測定値をもたらす。例えば、1または複数の信号ビームが(例えば、ビームが水界の底に「到達」できないようにする障害または大幅な姿勢の偏位によって)利用できなくなった場合、速度測定値を入手することはできない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
完全な水中を長距離移動するダイバまたは水中車両は、水面上のナビゲーション支援手段を使用することができず、最小限のエネルギ消費で自らの目的地に到達するための正確なナビゲーションシステムを必要とする。水中ナビゲーションの改良が当技術分野で必要である。
【課題を解決するための手段】
【0005】
本明細書で以下に、水中ナビゲーションの少なくとも1の方法およびシステムを規定する。一実施形態では、水中ナビゲーションの少なくとも1の方法は、水中ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
【0006】
これらおよび他の特徴、側面および利点は、以下の説明、添付の特許請求の範囲および添付の図面を考慮に入れることでさらに理解される。
様々な図面における同じ参照番号および符号は、同じ要素を示す。
【図面の簡単な説明】
【0007】
【図1】水中ナビゲーションシステムの一実施形態のブロック図である。
【図2】水中ナビゲーションシステムの測定処理の一実施形態のブロック図である。
【図3】水中ナビゲーションを行う方法の一実施形態の流れ図である。
【図4】信号ビームの速度予測を使用して水中ナビゲーションを行う方法の一実施形態の流れ図である。
【発明を実施するための形態】
【0008】
一実施形態では、このシステムは、GPS(全世界測位システム)受信機と、1または複数の加速度計を有するIMU(慣性計測装置)と、磁力計と、圧力センサと、1または複数のソナー信号ビーム(例えば、最大4の信号ビーム)を有するドップラソナーセンサとを含む。典型的な水中ナビゲーションの応用例では、ドップラソナーセンサからの速度測定値は最大5Hzのレートで入手可能であり、そのため動的振動運動を正確に追跡するのが難しくなっている。速度ベクトルの向きは急速に変わる可能性があるため、本明細書で論じる信号ビーム予測方法で速度を相対的に高い周波数(例えば、IMUの動作周波数)で積分した場合、より高い精度がもたらされる。本明細書で論じるナビゲーションシステムの一実施形態では、IMUは約100Hzで動作し、この帯域幅は動的動作条件下ではより理想的とみなされる。
【0009】
さらに、このナビゲーションシステムは、様々なセンサ入力を少なくとも1の誤差削減処理技術でフィルタリングする(例えば、カルマンフィルタは測定データを「平滑化」することによって前のデータ点を訂正する)ように動作可能なカルマンフィルタを備える、ナビゲーション訂正機能を提供する。カルマンフィルタによって提供されるデータの平滑化は、現時点のナビゲーション支援測定値を使用して過去のナビゲーション結果を訂正することにより、ナビゲーション訂正機能を形成する。少なくとも一実装形態では、このナビゲーションシステムは、圧力センサを鉛直高さの安定化のために使用して、最大2つのドップラソナービームと共に動作可能である。
【0010】
本明細書で論じる信号ビーム予測方法の少なくとも1の実施形態では、マルチビーム・ドップラソナーセンサをIMUと統合するには、ドップラソナーセンサの各ビームが個々に独立した測定値とみなされることが必要である。例えば、ビーム速度の予測値は、IMUからの速度測定値をドップラソナービームの方向に投影することによって決定される。さらに、ビーム速度が、ビーム速度の予測値と比較され、カルマンフィルタに供給される。次いで、カルマンフィルタが、その測定値が十分に「妥当」(例えば、その測定値がナビゲーションシステムを実質的に取り囲む外部環境条件から判断して正確とみなされる)かどうかの判定を行う。加えて、外部環境条件に関係なく、信号ビームは、ビームの方向での速度の投影を維持する。例えば、魚群または植物密集領域に遭遇するなどの偏差が、少なくともひとつの測定軸で「ビームドロップアウト」を発生させる場合にも、速度の投影は影響を受けず、ナビゲーションシステムは中断なしに正確に位置を追跡し続ける。
【0011】
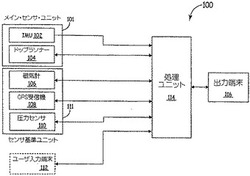
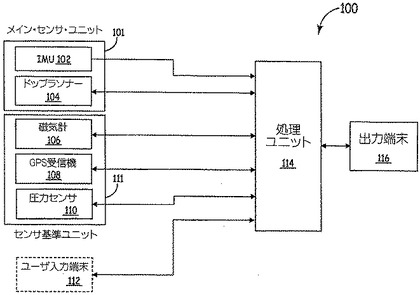
図1は、ナビゲーションシステム100のブロック図である。システム100は、処理ユニット114と、処理ユニット114と動作的通信状態にある出力端末116と、処理ユニット114に通信可能に結合されたユーザ入力端末112とを含む。図1のこの例示の実施形態では、処理ユニット114は、マイクロプロセッサ、マイクロコントローラ、フィールドプログラマブル・ゲートアレイ(FPGA)、フィールドプログラマブル・オブジェクトアレイ(FPOA)、プログラマブル論理回路(PLD)または特定用途向けIC(ASIC)の少なくともひとつを備える。一実装形態では、出力端末116は、システム100に関連する物体(例えば、システム100を備えるダイバまたは水中車両)の処理済みの慣性位置、姿勢および速度の測定値を表示するように動作可能である。少なくともひとつの同様の実装形態では、ユーザ入力端末112は、キーボード入力装置、表示入力装置、等を備えるオプションの構成要素である。
【0012】
システム100は、それぞれが処理ユニット114に通信可能に結合された、メインセンサ・ユニット101およびセンサ基準ユニット111をさらに備える。一実装形態では、メインセンサ・ユニットは、慣性計測装置(IMU)102およびドップラソナー104を備える。IMU102は、ナビゲーションシステムに関連する物体の慣性位置および進行方向を提供するように構成され、ドップラソナー104は、1または複数のソナー信号ビームを提供するように動作可能である。例えば、ドップラソナー104の少なくともひとつの信号ビーム構成は、関連する物体に隣接する表面を基準とするその物体の方位を提供する。一実施形態では、IMU102は、MEMS(微小電気機械システム)ベースのIMUである。
【0013】
図1のこの例示の実施形態では、センサ基準ユニット111は、第1のナビゲーション支援手段として構成される圧力センサ110と、第2のナビゲーション支援手段として構成される磁力計106と、GPS(全世界測位システム)受信機108とを含む。一実装形態では、GPS受信機108は、表面(海面)において、関連する物体の初期位置および速度を提供するように動作可能である。当然のことながら、システム100は、単一のシステム100内で適切な何種類のタイプのナビゲーションセンサ(例えば、1または複数のIMU102、ドップラソナー104、磁力計106、GPS受信機108、圧力センサ110、等)に対応することもできる。一実装形態では、第2のナビゲーション支援手段(磁力計106)が、表面磁界の強度および方向に基づいて方位基準を提供するように動作可能である。
【0014】
動作において、処理ユニット114は、メインセンサ・ユニット101で測定される慣性加速度およびドップラソナー104の少なくともひとつのソナー信号ビームに基づいて、関連する物体の速度を予測するように構成される。以下で図2によってより詳細に論じるように、処理ユニット114はさらに、慣性およびソナー信号ビーム速度の測定値の共分散に基づき規定の範囲内で少なくともひとつのソナー信号ビームの方位を決定し、1または複数の外部環境条件の影響を受けずに関連する物体の速度予測を維持するように構成される。例えば、第1のナビゲーション支援手段(圧力センサ110)は、水中ナビゲーションの重力補償係数に基づいて鉛直基準を提供するように動作可能である。一実装形態では、システム100は、ソナー信号ビームの少なくともひとつ、および第1のナビゲーション支援手段を使用して、規定の測定範囲内で機能するように構成される。この説明では、慣性およびソナー速度の共分散は、慣性およびソナー速度が、システム100からの積分された信号ビームの投影と共にどのように変動するのかの測度とみなされることに留意されたい。
【0015】
図1のこの例示の実施形態では、システム100は、ドップラソナー104の各ソナー信号ビームを個々の測定値とみなす。例えば、ソナー信号ビーム速度の予測値は、IMU102によって提供される慣性速度を各ソナー信号ビームに沿って投影することによって決定される。以下に図2および図3によってより詳細に論じるように、ドップラソナー104の各信号ビームによって提供されるソナー信号ビーム速度は、処理ユニット114内で、投影された速度の予測値と比較される。処理ユニット114は、各ソナー信号ビームの方向で積分された速度測定値を修正する。したがって、ドロップアウトまたは魚群もしくは海藻に遭遇するなど、少なくともひとつの測定軸で誤ったソナービーム情報が発生する状況でも、システム100は中断なしに正確に位置を追跡し続ける。さらに、ひとつの信号ビームが無効であると判定された場合でも、システム100はほぼ最小限の影響で無効な信号ビームを拒絶する。
【0016】
図2は、ナビゲーションシステム(例えば、図1のシステム100)における信号ビーム速度予測の処理200のブロック図である。図2のこの例示の実施形態では、処理200は、図1の処理ユニット114内で実行される。処理200は、カルマンフィルタ202、ならびに誤差状態更新モジュール206と動作的通信状態にある測定処理モジュール204を含む。処理200はさらに、カルマンフィルタ202と動作的通信状態にあるストラップダウン・ナビゲーション処理モジュール210、ならびに図1のIMU102およびストラップダウン・ナビゲーション処理モジュール210と動作的通信状態にあるセンサ補償モジュール208を含む。図2のこの例示の実施形態では、ストラップダウン・ナビゲーション処理モジュール210は、積分された慣性およびドップラソナー・ナビゲーションデータを図1の出力端末116に提供するように動作可能である。以下でより詳細に論じるように、センサ補償モジュール208は、ほぼリアルタイムで提供されるナビゲーション支援測定値を使用して、IMU102、カルマンフィルタ202、および測定処理モジュール204からの以前のナビゲーション測定値を補償するように構成される。一実装形態では、測定処理モジュール204は、少なくとも図1のドップラソナー104、磁力計106、GPS受信機108および圧力センサ110から測定値を受信する。誤差状態更新モジュール206からの補償済みセンサ測定値およびナビゲーション状態更新に基づいて、センサ補償モジュール208は、物体の積分された慣性データを実質的に一定なナビゲーションデータとしてストラップダウン・ナビゲーション処理モジュール210に提供する。以下により詳しく論じるように、例えば、カルマンフィルタ202は、少なくとも1のドップラソナー信号ビームの方向に沿って投影された、積分された、各慣性加速度を比較して、ナビゲーションシステム100に速度予測値を提供するように構成される。さらに、この速度予測は、システム100に関連する物体を実質的に取り囲む1または複数の外部環境条件によって妨げられない。
【0017】
カルマンフィルタ202は、ナビゲーション状態の推定値を改善するために、図1および図2に示すセンサからの測定値を混合する。例えば、(極めて良好な短期、高帯域特性を有するが、望ましくない長期特性を有する)IMU102からのナビゲーションデータを、(低帯域であるが、高い長期精度を有する)ドップラソナー104からのドップラ速度読取値と混合するのが有利である。カルマンフィルタ202は、以下に等式(Equation)1で表す典型的な形式に従う。
【0018】
【数1】

【0019】
ただし、Pは、共分散行列であり、
Φは、状態遷移行列であり、
Qは、プロセスノイズの密度行列であり、
Gは、プロセスノイズの動的結合行列である。
【0020】
等式1で、項
【0021】
【数2】
【0022】
および
【0023】
【数3】
【0024】
は、時間更新の後および前の共分散行列Pの値をそれぞれ区別する。右側の末項のGQGTは、時間経過に伴う共分散行列の増加に対するプロセスノイズの影響を表す。プロセスノイズの動的結合行列Gは、誤差状態の様々な要素を引き起こすノイズの諸成分間の相関関係を表すために使用することができる。図2のこの例示の実施形態では、標準のカルマンフィルタ・アルゴリズムの測定更新ステップは、以下に等式(Equation)2および等式(Equation)3で示すように表される。
【0025】
【数4】
【0026】
ただし、Kは、カルマンゲイン行列であり、
Hは、測定感度行列であり、
Rは、測定誤差の共分散行列である。
【0027】
等式2および等式3において、項
【0028】
【数5】
【0029】
および
【0030】
【数6】
【0031】
は、測定更新の前および後の値をそれぞれ区別する。さらに、ゲインKが、以下に表すように等式(Equation)4に従って誤差状態の推定値(xと表す)を更新するために使用される。
【0032】
【数7】
【0033】
ただし、Δyは、測定残差を表す。
一実装形態では、カルマンフィルタ202は、測定残差Δyを、本明細書で測定値の共分散と呼ぶ残差の期待値と比較する。例えば、単一のビーム測定値が測定値の共分散と比較されるとき、不正確な測定値を検出および拒絶する機能が、以下に等式(Equation)5および等式(Equation)6で示されるように形成される。
【0034】
【数8】
【0035】
ただし、
【0036】
【数9】
【0037】
は、予測されたビーム速度のベクトルであり、
vbは、測定されたビーム速度のベクトルであり、
【0038】
【数10】
【0039】
は、ナビゲーションフレームをビームフレームに関係付ける方向余弦行列であり、
vnは、ナビゲーションフレームの速度であり、
uxは、ビームX軸に沿った単位ベクトルであり、
・は、ドット積演算子である。
【0040】
上記に等式5および等式6で示したように、測定残差では、すべてのドップラソナービームを独立した測定値として扱う。一実装形態では、処理200は、ビーム速度を、ストラップダウン・ナビゲーション処理モジュール210によって予測される値と比較し、ビーム測定残差を等式3の
【0041】
【数11】
【0042】
項で定量的に定義される測定値の共分散と直接比較できるようにする。例えば、統計的に期待される残差(例えば3シグマすなわち3σ)を超える偏差があっても、結果として測定値が拒絶され、ナビゲーションの信頼性および精度が高まる。さらに、図2では、各ドップラ信号ビームが、カルマンフィルタ202の測定感度(H)行列で独立した測定値として処理される。したがって、どんな単一のドップラ信号ビームも、ドップラソナー104によって提供される他のビームとは独立に個別に使用される。一実施形態では、上記に等式3で示したように、処理200のH行列は、測定残差行列の一次偏導関数の行列(例えば、ヤコビ行列)として公式化される。この説明では、ヤコビ行列は、IMU102およびドップラソナー104によって提供されるナビゲーションデータを数学的に決定する際に、慣性およびソナー測定値を積分するために使用されることに留意されたい。
【0043】
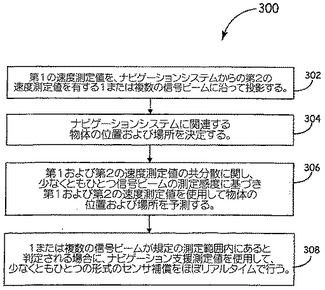
図3は、水中ナビゲーションの方法300の流れ図である。図3のこの例示の実施形態では、方法300は、第1の速度測定値を、ナビゲーションシステムからの第2の速度測定値を有する1または複数の信号ビームに沿って投影する(ブロック302)。図3のこの例示の実施形態では、第2の速度測定値は1または複数の信号ビームの少なくとも1に関係する。方法300は、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定する(ブロック304)。一実装形態では、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。方法300は、第1および第2の速度測定値の共分散に関し、少なくともひとつの信号ビームの測定感度に基づき第1および第2の速度測定値のソース成分の二次積分を使用して物体の位置および場所を予測する(ブロック306)。一実施形態では、方法300は、物体の位置および場所の予測値を、実質的に一定なナビゲーションデータとして、ナビゲーションシステムの出力端末に提供する。例えば、方法300は、1または複数の信号ビームが規定の測定範囲内にあると判定される場合に、ナビゲーション支援測定値を使用して少なくとも1の形式のセンサ補償をほぼリアルタイムで行う(ブロック308)。
【0044】
さらに、物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。一実装形態では、第1の速度測定値を、1または複数の信号ビームに沿って投影する際に、方法300は、第1および第2の速度測定値を、慣性速度成分とソナー速度成分とに分離する。同様の、または少なくともひとつの代替実装形態では、実質的に一定なナビゲーションデータを提供する際に、方法300は、第1および第2の速度測定値の予測値を第2の速度測定値と比較して、少なくともひとつの信号ビームの方向における第1および第2の速度測定値の共分散を調整する。
【0045】
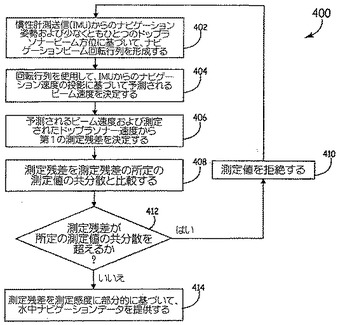
図4は、信号ビームの速度予測を使用して水中ナビゲーションを行う方法400の流れ図である。図4のこの例示の実施形態では、方法400は、図1のシステム100を使用し、上記で図2によって論じた信号ビーム速度予測処理を組み込んだ、水中ナビゲーションに関する。一実施形態では、方法400は、システム100の慣性ナビゲーションおよびドップラソナー測定値を第1および第2の速度測定値として提供し、ここで、第1の速度測定値は、ナビゲーション速度の投影として、第2の速度測定値の少なくとも1の信号ビームの方位に沿って投影される。例えば方法400は、ナビゲーションシステムからの姿勢測定値ならびにドップラビームの方向および位置の予備的情報に基づいて、ナビゲーション−ビーム回転行列を形成する(ブロック402)。この回転行列を使用して、方法400は、システム100の慣性計測装置部からの慣性速度の投影に基づいて、速度予測値を決定する。例えば、方法400は、ナビゲーション速度の投影を少なくともひとつの信号ビームの方位と比較して、システム100に関連する物体の速度予測値を決定する。その際、速度予測は、物体を実質的に取り囲む1または複数の外部環境条件によって妨げられない。
【0046】
一実装形態では、ナビゲーション速度測定値を投影することは、ナビゲーションおよびソナービーム速度の測定値を、慣性(第1)速度測定値とソナー(第2)速度測定値とに分離することを含む。上記で図1および図2によって論じたように、第1および第2の速度測定値は、システム100の規定の測定範囲内にある基準座標系の速度測定値をさらに含む。
【0047】
物体の方位および位置を決定するために、図4に示す方法は、予測されるビーム速度およびドップラソナー速度から測定残差を決定する(ブロック406)。方法400は、測定残差を、測定残差の所定の測定値の共分散と比較する(ブロック408)。測定残差が所定の測定値の共分散を超える場合(ブロック412)、方法400は速度予測値を拒絶する(ブロック410)。方法400は、再びブロック402から開始して別の予測を試みる。測定残差が所定の測定値の共分散の範囲内にある(例えば、測定残差が許容できるとみなされる)場合、方法400は、信号ビーム速度予測値を使用し、許容される測定残差の測定感度に部分的に基づいて、物体の水中ナビゲーションデータを提供する(ブロック414)。上記に論じたように、このナビゲーションシステムは、方法400を使用して、1または複数の外部環境条件とは独立に、少なくともひとつの信号ビームに沿って少なくとも第1の速度測定の速度予測を維持する。さらに、方法400は、システム100が、出力端末116から実質的に一定なナビゲーションデータをほぼリアルタイムで提供できるようにする。
【0048】
本明細書で説明した方法および技術は、デジタル電子回路と、プログラマブル・プロセッサ中にあるソフトウェア(またはファームウェア)との組合せで実装することができる。これらの技術を具体化した装置は、適切な入出力装置、プログラマブル・プロセッサ、およびプログラマブル・プロセッサによって実行されるプログラム命令を有形に具体化する記憶媒体を含むことができる。これらの技術を具体化した処理は、入力データに対して操作を行い、適切な出力データを生成する命令のプログラムを実行するプログラマブル・プロセッサによって実行することができる。この技術は、データ記憶システム、少なくともひとつの入力装置、および少なくともひとつの出力装置からデータおよび命令を受信(ならびにデータ記憶システム、少なくともひとつの入力装置、および少なくともひとつの出力装置にデータおよび命令を送信)するように結合された少なくともひとつのプログラマブル・プロセッサを含むプログラマブル・システムで実行可能な1または複数のプログラムで実装することができる。一般に、プロセッサは、ROM(読出し専用メモリ)およびRAM(ランダムアクセスメモリ)の少なくともひとつから命令およびデータを受信する。さらに、コンピュータプログラム命令およびデータを有形に具体化するのに適した記憶媒体には、どんな形の不揮発性記憶装置も含まれ、例として、半導体記憶装置、内蔵ハードディスクやリムーバブルディスクなどの磁気ディスク、光磁気ディスク、光ディスクおよび他のコンピュータ可読媒体が含まれる。上記のどれも、特別に設計された特定用途向けIC(ASIC)によって補足しても、あるいは特別に設計された特定用途向けIC(ASIC)に組み込んでもよい。
【0049】
情報がネットワークまたは別の通信接続(ハードワイヤ式、無線、またはハードワイヤ式もしくは無線の組合せのいずれか)を介してコンピュータに転送または提供される場合、コンピュータはその接続をコンピュータ可読媒体と適切にみなす。したがって、そのようないかなる接続も、コンピュータ可読媒体と適切に呼ばれる。上記のものの組合せも、コンピュータ可読媒体の範囲内に含まれる。
【0050】
この説明は、例示の目的で示したものであり、網羅的であることまたは開示された実施形態に限定されることを意図するものではない。添付の特許請求の範囲の範囲内に含まれる改変形態または修正形態を思いつくかもしれない。
【符号の説明】
【0051】
100 ナビゲーションシステム
101 メインセンサ・ユニット
102 慣性計測装置(IMU)
104 ドップラソナー
106 磁力計
108 GPS(全世界測位システム)受信機
110 圧力センサ
111 センサ基準ユニット
112 ユーザ入力端末
114 処理ユニット
116 出力端末
202 カルマンフィルタ
204 測定処理モジュール
206 誤差状態更新モジュール
208 センサ補償モジュール
210 ストラップダウン・ナビゲーション処理モジュール
【発明の詳細な説明】
【0001】
政府権益声明
米国政府は、米国海軍および防衛高等研究企画庁(DARPA)によって与えられた契約番号N66001−07−C−2004のもと、本発明の一定の権利を有し得る。
【技術分野】
【0002】
本明細書で開示する実施形態は、水中ナビゲーションの少なくとも1の方法およびシステムに関する。より詳細には、本明細書で論じる水中ナビゲーションは、水中の地形、または継続的かつ正確な位置決定および深度測定情報を必要とする任意の同様の地形を調査しながら、位置および速度を測定する方法に関する。例えば、本明細書で論じるナビゲーションの方法を使用するシステムは、個人のダイバまたは1もしくは複数の形態の水中車両に適した正確かつ安価なナビゲーションおよび深度測定機能を提供する。
【背景技術】
【0003】
現在、水中ナビゲーションシステムの様々な実装形態が存在する。例えば、3以上の信号ビームを有するドップラソナー装置が、「Janus;ヤヌス」構成で動作可能である。典型的なヤヌス構成では、各信号ビームからの情報が数学的に合成され、ビームを基準とするドップラ速度測定値が直交基準座標系に変換される。しかし、このタイプのナビゲーションは、ナビゲーション・ドリフト、外部環境条件、および、放置された場合に不正確な位置、深度または距離の推定値をもたらす他のタイプの測定誤差の影響を受けやすい。例えば、単一の速度成分を計算するために2以上のビームが組み合わされるので、信号ビームの速度測定で生じる誤差が容易に検出可能ではなく、得られる基準座標系の速度の精度がより低くなる。さらに、ドップラソナーの速度帯域幅の制限は、典型的には信号ビームの消失または歪曲により、誤った速度測定値をもたらす。例えば、1または複数の信号ビームが(例えば、ビームが水界の底に「到達」できないようにする障害または大幅な姿勢の偏位によって)利用できなくなった場合、速度測定値を入手することはできない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
完全な水中を長距離移動するダイバまたは水中車両は、水面上のナビゲーション支援手段を使用することができず、最小限のエネルギ消費で自らの目的地に到達するための正確なナビゲーションシステムを必要とする。水中ナビゲーションの改良が当技術分野で必要である。
【課題を解決するための手段】
【0005】
本明細書で以下に、水中ナビゲーションの少なくとも1の方法およびシステムを規定する。一実施形態では、水中ナビゲーションの少なくとも1の方法は、水中ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
【0006】
これらおよび他の特徴、側面および利点は、以下の説明、添付の特許請求の範囲および添付の図面を考慮に入れることでさらに理解される。
様々な図面における同じ参照番号および符号は、同じ要素を示す。
【図面の簡単な説明】
【0007】
【図1】水中ナビゲーションシステムの一実施形態のブロック図である。
【図2】水中ナビゲーションシステムの測定処理の一実施形態のブロック図である。
【図3】水中ナビゲーションを行う方法の一実施形態の流れ図である。
【図4】信号ビームの速度予測を使用して水中ナビゲーションを行う方法の一実施形態の流れ図である。
【発明を実施するための形態】
【0008】
一実施形態では、このシステムは、GPS(全世界測位システム)受信機と、1または複数の加速度計を有するIMU(慣性計測装置)と、磁力計と、圧力センサと、1または複数のソナー信号ビーム(例えば、最大4の信号ビーム)を有するドップラソナーセンサとを含む。典型的な水中ナビゲーションの応用例では、ドップラソナーセンサからの速度測定値は最大5Hzのレートで入手可能であり、そのため動的振動運動を正確に追跡するのが難しくなっている。速度ベクトルの向きは急速に変わる可能性があるため、本明細書で論じる信号ビーム予測方法で速度を相対的に高い周波数(例えば、IMUの動作周波数)で積分した場合、より高い精度がもたらされる。本明細書で論じるナビゲーションシステムの一実施形態では、IMUは約100Hzで動作し、この帯域幅は動的動作条件下ではより理想的とみなされる。
【0009】
さらに、このナビゲーションシステムは、様々なセンサ入力を少なくとも1の誤差削減処理技術でフィルタリングする(例えば、カルマンフィルタは測定データを「平滑化」することによって前のデータ点を訂正する)ように動作可能なカルマンフィルタを備える、ナビゲーション訂正機能を提供する。カルマンフィルタによって提供されるデータの平滑化は、現時点のナビゲーション支援測定値を使用して過去のナビゲーション結果を訂正することにより、ナビゲーション訂正機能を形成する。少なくとも一実装形態では、このナビゲーションシステムは、圧力センサを鉛直高さの安定化のために使用して、最大2つのドップラソナービームと共に動作可能である。
【0010】
本明細書で論じる信号ビーム予測方法の少なくとも1の実施形態では、マルチビーム・ドップラソナーセンサをIMUと統合するには、ドップラソナーセンサの各ビームが個々に独立した測定値とみなされることが必要である。例えば、ビーム速度の予測値は、IMUからの速度測定値をドップラソナービームの方向に投影することによって決定される。さらに、ビーム速度が、ビーム速度の予測値と比較され、カルマンフィルタに供給される。次いで、カルマンフィルタが、その測定値が十分に「妥当」(例えば、その測定値がナビゲーションシステムを実質的に取り囲む外部環境条件から判断して正確とみなされる)かどうかの判定を行う。加えて、外部環境条件に関係なく、信号ビームは、ビームの方向での速度の投影を維持する。例えば、魚群または植物密集領域に遭遇するなどの偏差が、少なくともひとつの測定軸で「ビームドロップアウト」を発生させる場合にも、速度の投影は影響を受けず、ナビゲーションシステムは中断なしに正確に位置を追跡し続ける。
【0011】
図1は、ナビゲーションシステム100のブロック図である。システム100は、処理ユニット114と、処理ユニット114と動作的通信状態にある出力端末116と、処理ユニット114に通信可能に結合されたユーザ入力端末112とを含む。図1のこの例示の実施形態では、処理ユニット114は、マイクロプロセッサ、マイクロコントローラ、フィールドプログラマブル・ゲートアレイ(FPGA)、フィールドプログラマブル・オブジェクトアレイ(FPOA)、プログラマブル論理回路(PLD)または特定用途向けIC(ASIC)の少なくともひとつを備える。一実装形態では、出力端末116は、システム100に関連する物体(例えば、システム100を備えるダイバまたは水中車両)の処理済みの慣性位置、姿勢および速度の測定値を表示するように動作可能である。少なくともひとつの同様の実装形態では、ユーザ入力端末112は、キーボード入力装置、表示入力装置、等を備えるオプションの構成要素である。
【0012】
システム100は、それぞれが処理ユニット114に通信可能に結合された、メインセンサ・ユニット101およびセンサ基準ユニット111をさらに備える。一実装形態では、メインセンサ・ユニットは、慣性計測装置(IMU)102およびドップラソナー104を備える。IMU102は、ナビゲーションシステムに関連する物体の慣性位置および進行方向を提供するように構成され、ドップラソナー104は、1または複数のソナー信号ビームを提供するように動作可能である。例えば、ドップラソナー104の少なくともひとつの信号ビーム構成は、関連する物体に隣接する表面を基準とするその物体の方位を提供する。一実施形態では、IMU102は、MEMS(微小電気機械システム)ベースのIMUである。
【0013】
図1のこの例示の実施形態では、センサ基準ユニット111は、第1のナビゲーション支援手段として構成される圧力センサ110と、第2のナビゲーション支援手段として構成される磁力計106と、GPS(全世界測位システム)受信機108とを含む。一実装形態では、GPS受信機108は、表面(海面)において、関連する物体の初期位置および速度を提供するように動作可能である。当然のことながら、システム100は、単一のシステム100内で適切な何種類のタイプのナビゲーションセンサ(例えば、1または複数のIMU102、ドップラソナー104、磁力計106、GPS受信機108、圧力センサ110、等)に対応することもできる。一実装形態では、第2のナビゲーション支援手段(磁力計106)が、表面磁界の強度および方向に基づいて方位基準を提供するように動作可能である。
【0014】
動作において、処理ユニット114は、メインセンサ・ユニット101で測定される慣性加速度およびドップラソナー104の少なくともひとつのソナー信号ビームに基づいて、関連する物体の速度を予測するように構成される。以下で図2によってより詳細に論じるように、処理ユニット114はさらに、慣性およびソナー信号ビーム速度の測定値の共分散に基づき規定の範囲内で少なくともひとつのソナー信号ビームの方位を決定し、1または複数の外部環境条件の影響を受けずに関連する物体の速度予測を維持するように構成される。例えば、第1のナビゲーション支援手段(圧力センサ110)は、水中ナビゲーションの重力補償係数に基づいて鉛直基準を提供するように動作可能である。一実装形態では、システム100は、ソナー信号ビームの少なくともひとつ、および第1のナビゲーション支援手段を使用して、規定の測定範囲内で機能するように構成される。この説明では、慣性およびソナー速度の共分散は、慣性およびソナー速度が、システム100からの積分された信号ビームの投影と共にどのように変動するのかの測度とみなされることに留意されたい。
【0015】
図1のこの例示の実施形態では、システム100は、ドップラソナー104の各ソナー信号ビームを個々の測定値とみなす。例えば、ソナー信号ビーム速度の予測値は、IMU102によって提供される慣性速度を各ソナー信号ビームに沿って投影することによって決定される。以下に図2および図3によってより詳細に論じるように、ドップラソナー104の各信号ビームによって提供されるソナー信号ビーム速度は、処理ユニット114内で、投影された速度の予測値と比較される。処理ユニット114は、各ソナー信号ビームの方向で積分された速度測定値を修正する。したがって、ドロップアウトまたは魚群もしくは海藻に遭遇するなど、少なくともひとつの測定軸で誤ったソナービーム情報が発生する状況でも、システム100は中断なしに正確に位置を追跡し続ける。さらに、ひとつの信号ビームが無効であると判定された場合でも、システム100はほぼ最小限の影響で無効な信号ビームを拒絶する。
【0016】
図2は、ナビゲーションシステム(例えば、図1のシステム100)における信号ビーム速度予測の処理200のブロック図である。図2のこの例示の実施形態では、処理200は、図1の処理ユニット114内で実行される。処理200は、カルマンフィルタ202、ならびに誤差状態更新モジュール206と動作的通信状態にある測定処理モジュール204を含む。処理200はさらに、カルマンフィルタ202と動作的通信状態にあるストラップダウン・ナビゲーション処理モジュール210、ならびに図1のIMU102およびストラップダウン・ナビゲーション処理モジュール210と動作的通信状態にあるセンサ補償モジュール208を含む。図2のこの例示の実施形態では、ストラップダウン・ナビゲーション処理モジュール210は、積分された慣性およびドップラソナー・ナビゲーションデータを図1の出力端末116に提供するように動作可能である。以下でより詳細に論じるように、センサ補償モジュール208は、ほぼリアルタイムで提供されるナビゲーション支援測定値を使用して、IMU102、カルマンフィルタ202、および測定処理モジュール204からの以前のナビゲーション測定値を補償するように構成される。一実装形態では、測定処理モジュール204は、少なくとも図1のドップラソナー104、磁力計106、GPS受信機108および圧力センサ110から測定値を受信する。誤差状態更新モジュール206からの補償済みセンサ測定値およびナビゲーション状態更新に基づいて、センサ補償モジュール208は、物体の積分された慣性データを実質的に一定なナビゲーションデータとしてストラップダウン・ナビゲーション処理モジュール210に提供する。以下により詳しく論じるように、例えば、カルマンフィルタ202は、少なくとも1のドップラソナー信号ビームの方向に沿って投影された、積分された、各慣性加速度を比較して、ナビゲーションシステム100に速度予測値を提供するように構成される。さらに、この速度予測は、システム100に関連する物体を実質的に取り囲む1または複数の外部環境条件によって妨げられない。
【0017】
カルマンフィルタ202は、ナビゲーション状態の推定値を改善するために、図1および図2に示すセンサからの測定値を混合する。例えば、(極めて良好な短期、高帯域特性を有するが、望ましくない長期特性を有する)IMU102からのナビゲーションデータを、(低帯域であるが、高い長期精度を有する)ドップラソナー104からのドップラ速度読取値と混合するのが有利である。カルマンフィルタ202は、以下に等式(Equation)1で表す典型的な形式に従う。
【0018】
【数1】
【0019】
ただし、Pは、共分散行列であり、
Φは、状態遷移行列であり、
Qは、プロセスノイズの密度行列であり、
Gは、プロセスノイズの動的結合行列である。
【0020】
等式1で、項
【0021】
【数2】
【0022】
および
【0023】
【数3】
【0024】
は、時間更新の後および前の共分散行列Pの値をそれぞれ区別する。右側の末項のGQGTは、時間経過に伴う共分散行列の増加に対するプロセスノイズの影響を表す。プロセスノイズの動的結合行列Gは、誤差状態の様々な要素を引き起こすノイズの諸成分間の相関関係を表すために使用することができる。図2のこの例示の実施形態では、標準のカルマンフィルタ・アルゴリズムの測定更新ステップは、以下に等式(Equation)2および等式(Equation)3で示すように表される。
【0025】
【数4】
【0026】
ただし、Kは、カルマンゲイン行列であり、
Hは、測定感度行列であり、
Rは、測定誤差の共分散行列である。
【0027】
等式2および等式3において、項
【0028】
【数5】
【0029】
および
【0030】
【数6】
【0031】
は、測定更新の前および後の値をそれぞれ区別する。さらに、ゲインKが、以下に表すように等式(Equation)4に従って誤差状態の推定値(xと表す)を更新するために使用される。
【0032】
【数7】
【0033】
ただし、Δyは、測定残差を表す。
一実装形態では、カルマンフィルタ202は、測定残差Δyを、本明細書で測定値の共分散と呼ぶ残差の期待値と比較する。例えば、単一のビーム測定値が測定値の共分散と比較されるとき、不正確な測定値を検出および拒絶する機能が、以下に等式(Equation)5および等式(Equation)6で示されるように形成される。
【0034】
【数8】
【0035】
ただし、
【0036】
【数9】
【0037】
は、予測されたビーム速度のベクトルであり、
vbは、測定されたビーム速度のベクトルであり、
【0038】
【数10】
【0039】
は、ナビゲーションフレームをビームフレームに関係付ける方向余弦行列であり、
vnは、ナビゲーションフレームの速度であり、
uxは、ビームX軸に沿った単位ベクトルであり、
・は、ドット積演算子である。
【0040】
上記に等式5および等式6で示したように、測定残差では、すべてのドップラソナービームを独立した測定値として扱う。一実装形態では、処理200は、ビーム速度を、ストラップダウン・ナビゲーション処理モジュール210によって予測される値と比較し、ビーム測定残差を等式3の
【0041】
【数11】
【0042】
項で定量的に定義される測定値の共分散と直接比較できるようにする。例えば、統計的に期待される残差(例えば3シグマすなわち3σ)を超える偏差があっても、結果として測定値が拒絶され、ナビゲーションの信頼性および精度が高まる。さらに、図2では、各ドップラ信号ビームが、カルマンフィルタ202の測定感度(H)行列で独立した測定値として処理される。したがって、どんな単一のドップラ信号ビームも、ドップラソナー104によって提供される他のビームとは独立に個別に使用される。一実施形態では、上記に等式3で示したように、処理200のH行列は、測定残差行列の一次偏導関数の行列(例えば、ヤコビ行列)として公式化される。この説明では、ヤコビ行列は、IMU102およびドップラソナー104によって提供されるナビゲーションデータを数学的に決定する際に、慣性およびソナー測定値を積分するために使用されることに留意されたい。
【0043】
図3は、水中ナビゲーションの方法300の流れ図である。図3のこの例示の実施形態では、方法300は、第1の速度測定値を、ナビゲーションシステムからの第2の速度測定値を有する1または複数の信号ビームに沿って投影する(ブロック302)。図3のこの例示の実施形態では、第2の速度測定値は1または複数の信号ビームの少なくとも1に関係する。方法300は、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定する(ブロック304)。一実装形態では、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。方法300は、第1および第2の速度測定値の共分散に関し、少なくともひとつの信号ビームの測定感度に基づき第1および第2の速度測定値のソース成分の二次積分を使用して物体の位置および場所を予測する(ブロック306)。一実施形態では、方法300は、物体の位置および場所の予測値を、実質的に一定なナビゲーションデータとして、ナビゲーションシステムの出力端末に提供する。例えば、方法300は、1または複数の信号ビームが規定の測定範囲内にあると判定される場合に、ナビゲーション支援測定値を使用して少なくとも1の形式のセンサ補償をほぼリアルタイムで行う(ブロック308)。
【0044】
さらに、物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。一実装形態では、第1の速度測定値を、1または複数の信号ビームに沿って投影する際に、方法300は、第1および第2の速度測定値を、慣性速度成分とソナー速度成分とに分離する。同様の、または少なくともひとつの代替実装形態では、実質的に一定なナビゲーションデータを提供する際に、方法300は、第1および第2の速度測定値の予測値を第2の速度測定値と比較して、少なくともひとつの信号ビームの方向における第1および第2の速度測定値の共分散を調整する。
【0045】
図4は、信号ビームの速度予測を使用して水中ナビゲーションを行う方法400の流れ図である。図4のこの例示の実施形態では、方法400は、図1のシステム100を使用し、上記で図2によって論じた信号ビーム速度予測処理を組み込んだ、水中ナビゲーションに関する。一実施形態では、方法400は、システム100の慣性ナビゲーションおよびドップラソナー測定値を第1および第2の速度測定値として提供し、ここで、第1の速度測定値は、ナビゲーション速度の投影として、第2の速度測定値の少なくとも1の信号ビームの方位に沿って投影される。例えば方法400は、ナビゲーションシステムからの姿勢測定値ならびにドップラビームの方向および位置の予備的情報に基づいて、ナビゲーション−ビーム回転行列を形成する(ブロック402)。この回転行列を使用して、方法400は、システム100の慣性計測装置部からの慣性速度の投影に基づいて、速度予測値を決定する。例えば、方法400は、ナビゲーション速度の投影を少なくともひとつの信号ビームの方位と比較して、システム100に関連する物体の速度予測値を決定する。その際、速度予測は、物体を実質的に取り囲む1または複数の外部環境条件によって妨げられない。
【0046】
一実装形態では、ナビゲーション速度測定値を投影することは、ナビゲーションおよびソナービーム速度の測定値を、慣性(第1)速度測定値とソナー(第2)速度測定値とに分離することを含む。上記で図1および図2によって論じたように、第1および第2の速度測定値は、システム100の規定の測定範囲内にある基準座標系の速度測定値をさらに含む。
【0047】
物体の方位および位置を決定するために、図4に示す方法は、予測されるビーム速度およびドップラソナー速度から測定残差を決定する(ブロック406)。方法400は、測定残差を、測定残差の所定の測定値の共分散と比較する(ブロック408)。測定残差が所定の測定値の共分散を超える場合(ブロック412)、方法400は速度予測値を拒絶する(ブロック410)。方法400は、再びブロック402から開始して別の予測を試みる。測定残差が所定の測定値の共分散の範囲内にある(例えば、測定残差が許容できるとみなされる)場合、方法400は、信号ビーム速度予測値を使用し、許容される測定残差の測定感度に部分的に基づいて、物体の水中ナビゲーションデータを提供する(ブロック414)。上記に論じたように、このナビゲーションシステムは、方法400を使用して、1または複数の外部環境条件とは独立に、少なくともひとつの信号ビームに沿って少なくとも第1の速度測定の速度予測を維持する。さらに、方法400は、システム100が、出力端末116から実質的に一定なナビゲーションデータをほぼリアルタイムで提供できるようにする。
【0048】
本明細書で説明した方法および技術は、デジタル電子回路と、プログラマブル・プロセッサ中にあるソフトウェア(またはファームウェア)との組合せで実装することができる。これらの技術を具体化した装置は、適切な入出力装置、プログラマブル・プロセッサ、およびプログラマブル・プロセッサによって実行されるプログラム命令を有形に具体化する記憶媒体を含むことができる。これらの技術を具体化した処理は、入力データに対して操作を行い、適切な出力データを生成する命令のプログラムを実行するプログラマブル・プロセッサによって実行することができる。この技術は、データ記憶システム、少なくともひとつの入力装置、および少なくともひとつの出力装置からデータおよび命令を受信(ならびにデータ記憶システム、少なくともひとつの入力装置、および少なくともひとつの出力装置にデータおよび命令を送信)するように結合された少なくともひとつのプログラマブル・プロセッサを含むプログラマブル・システムで実行可能な1または複数のプログラムで実装することができる。一般に、プロセッサは、ROM(読出し専用メモリ)およびRAM(ランダムアクセスメモリ)の少なくともひとつから命令およびデータを受信する。さらに、コンピュータプログラム命令およびデータを有形に具体化するのに適した記憶媒体には、どんな形の不揮発性記憶装置も含まれ、例として、半導体記憶装置、内蔵ハードディスクやリムーバブルディスクなどの磁気ディスク、光磁気ディスク、光ディスクおよび他のコンピュータ可読媒体が含まれる。上記のどれも、特別に設計された特定用途向けIC(ASIC)によって補足しても、あるいは特別に設計された特定用途向けIC(ASIC)に組み込んでもよい。
【0049】
情報がネットワークまたは別の通信接続(ハードワイヤ式、無線、またはハードワイヤ式もしくは無線の組合せのいずれか)を介してコンピュータに転送または提供される場合、コンピュータはその接続をコンピュータ可読媒体と適切にみなす。したがって、そのようないかなる接続も、コンピュータ可読媒体と適切に呼ばれる。上記のものの組合せも、コンピュータ可読媒体の範囲内に含まれる。
【0050】
この説明は、例示の目的で示したものであり、網羅的であることまたは開示された実施形態に限定されることを意図するものではない。添付の特許請求の範囲の範囲内に含まれる改変形態または修正形態を思いつくかもしれない。
【符号の説明】
【0051】
100 ナビゲーションシステム
101 メインセンサ・ユニット
102 慣性計測装置(IMU)
104 ドップラソナー
106 磁力計
108 GPS(全世界測位システム)受信機
110 圧力センサ
111 センサ基準ユニット
112 ユーザ入力端末
114 処理ユニット
116 出力端末
202 カルマンフィルタ
204 測定処理モジュール
206 誤差状態更新モジュール
208 センサ補償モジュール
210 ストラップダウン・ナビゲーション処理モジュール
【特許請求の範囲】
【請求項1】
ナビゲーションシステム(100)からの第2の速度測定値を有する1または複数の信号ビームに沿って第1の速度測定値を投影するステップ(302)と、前記第2の速度測定値は前記1または複数の信号ビームの少なくともひとつに関係し、
少なくとも前記第2の速度測定値の予測に基づいて、前記ナビゲーションシステムに関連する物体の位置および場所を決定するステップ(304)と、前記ナビゲーションシステムは、前記第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整され、
前記物体の前記位置および場所を決定する際に行われる前記性能調整は、1または複数の外部環境条件により前記各信号ビームを維持する前記ナビゲーションシステムと独立に動作可能である、
水中ナビゲーションの方法(300)。
【請求項2】
前記第1の速度測定値を投影するステップは、前記第1および第2の速度測定値を慣性(102)速度成分とソナー(104)速度成分とに分離するステップを含む、請求項1に記載の方法。
【請求項3】
前記位置および場所を決定するステップは、
前記第1の速度測定値のソース成分の二次積分を使用して、前記物体の前記位置および場所を予測するステップ(306)と、
前記第1および第2の速度測定値の共分散に関し、少なくとも1の前記信号ビームの測定感度に基づいて、実質的に一定なナビゲーションデータを前記ナビゲーションシステムの出力端末(116)に提供するステップと
をさらに含む、請求項1に記載の方法。
【請求項1】
ナビゲーションシステム(100)からの第2の速度測定値を有する1または複数の信号ビームに沿って第1の速度測定値を投影するステップ(302)と、前記第2の速度測定値は前記1または複数の信号ビームの少なくともひとつに関係し、
少なくとも前記第2の速度測定値の予測に基づいて、前記ナビゲーションシステムに関連する物体の位置および場所を決定するステップ(304)と、前記ナビゲーションシステムは、前記第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整され、
前記物体の前記位置および場所を決定する際に行われる前記性能調整は、1または複数の外部環境条件により前記各信号ビームを維持する前記ナビゲーションシステムと独立に動作可能である、
水中ナビゲーションの方法(300)。
【請求項2】
前記第1の速度測定値を投影するステップは、前記第1および第2の速度測定値を慣性(102)速度成分とソナー(104)速度成分とに分離するステップを含む、請求項1に記載の方法。
【請求項3】
前記位置および場所を決定するステップは、
前記第1の速度測定値のソース成分の二次積分を使用して、前記物体の前記位置および場所を予測するステップ(306)と、
前記第1および第2の速度測定値の共分散に関し、少なくとも1の前記信号ビームの測定感度に基づいて、実質的に一定なナビゲーションデータを前記ナビゲーションシステムの出力端末(116)に提供するステップと
をさらに含む、請求項1に記載の方法。
【図1】

【図2】

【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−229452(P2009−229452A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−8869(P2009−8869)
【出願日】平成21年1月19日(2009.1.19)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2009−8869(P2009−8869)
【出願日】平成21年1月19日(2009.1.19)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]