
水中ロボットを利用した交通情報システム
【目的】都市河川に架かる橋の交通情報は災害時には特に重要となるため、河川上のロボットから観測した橋の交通情報を無線で送信し、災害時にも有効に作動する交通情報システムを提供する。
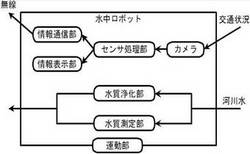
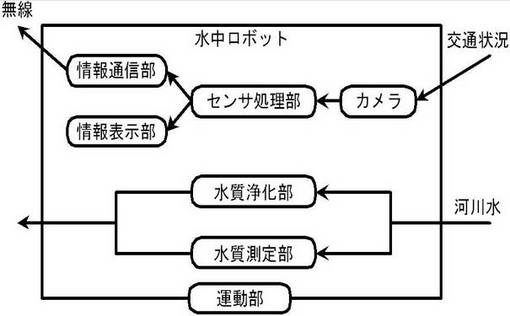
【構成】河川の水を取り込み、水質浄化部および水質測定部で処理する水中ロボットにおいて、カメラから周辺環境の状況を取り込み、画像処理を行い、有効な情報を通信部より無線で送信する。また、その情報はそのまま表示部で表示される。
【構成】河川の水を取り込み、水質浄化部および水質測定部で処理する水中ロボットにおいて、カメラから周辺環境の状況を取り込み、画像処理を行い、有効な情報を通信部より無線で送信する。また、その情報はそのまま表示部で表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、水上のロボットから周辺環境の交通状況を監視する交通情報システムに関する。
【背景技術】
【0002】
近年の環境問題への意識の高まりにより、河川環境を浄化したいという世論の動きがある。発明者らは河川環境に対応した水中ロボットシステムを開発し、その要望に答えていく際、さらなる技術として、災害時の交通情報を市民に提供する技術を発明するに至った。
【0003】
従来は、道路交通情報は、道路上で観測しているが、地震などの大規模災害時には破損し、障害となる可能性がある。特に、都市河川に架かる橋の情報は災害時には重要となるため、災害時にも有効に作動する交通情報システムが望まれる。
【特許文献1】特開平5−203638号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本技術が解決しようとする問題点は、地震などの大規模災害時に道路上の観測機が破損などにより交通情報が得られない点である。そのような災害時にこそ重要である都市河川に架かる橋の交通情報を有効に把握することが可能となる。
【課題を解決するための手段】
【0005】
従来は道路上で交通状況の観測を行っているが、都市河川で水質浄化や観測を行っている水中ロボットを利用して、河川上から橋の上の交通を観測し、無線により交通情報を伝送する。水上からの観測となるため、震災などの影響を受けにくい。
【発明の効果】
【0006】
地震などの大規模災害時に道路上の観測機が破損などにより交通情報が得られないような場合にも、交通情報を有効に把握することが可能となる。
【図面の簡単な説明】
【0007】
水中ロボットは河川で移動できるように運動部を有する。また、河川水を取り込み、水質浄化および水質測定が可能である。カメラから周辺環境の状況を収得し、画像処理して有効な情報を抽出した後、無線で情報を送信する。また、その情報はその場で表示することができる。
【図1】水中ロボットにおける交通情報処理システムを示した説明図である。
【技術分野】
【0001】
本発明は、水上のロボットから周辺環境の交通状況を監視する交通情報システムに関する。
【背景技術】
【0002】
近年の環境問題への意識の高まりにより、河川環境を浄化したいという世論の動きがある。発明者らは河川環境に対応した水中ロボットシステムを開発し、その要望に答えていく際、さらなる技術として、災害時の交通情報を市民に提供する技術を発明するに至った。
【0003】
従来は、道路交通情報は、道路上で観測しているが、地震などの大規模災害時には破損し、障害となる可能性がある。特に、都市河川に架かる橋の情報は災害時には重要となるため、災害時にも有効に作動する交通情報システムが望まれる。
【特許文献1】特開平5−203638号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本技術が解決しようとする問題点は、地震などの大規模災害時に道路上の観測機が破損などにより交通情報が得られない点である。そのような災害時にこそ重要である都市河川に架かる橋の交通情報を有効に把握することが可能となる。
【課題を解決するための手段】
【0005】
従来は道路上で交通状況の観測を行っているが、都市河川で水質浄化や観測を行っている水中ロボットを利用して、河川上から橋の上の交通を観測し、無線により交通情報を伝送する。水上からの観測となるため、震災などの影響を受けにくい。
【発明の効果】
【0006】
地震などの大規模災害時に道路上の観測機が破損などにより交通情報が得られないような場合にも、交通情報を有効に把握することが可能となる。
【図面の簡単な説明】
【0007】
水中ロボットは河川で移動できるように運動部を有する。また、河川水を取り込み、水質浄化および水質測定が可能である。カメラから周辺環境の状況を収得し、画像処理して有効な情報を抽出した後、無線で情報を送信する。また、その情報はその場で表示することができる。
【図1】水中ロボットにおける交通情報処理システムを示した説明図である。
【特許請求の範囲】
【請求項1】
水質を浄化する水質浄化部と、水質を測定する水質測定部と、周辺環境をモニタするカメラ部と、水上および/または水中を移動する運動部と、センサ情報を処理する処理部と、信号を伝送する通信部と、外部に表示する表示部とを備える水中ロボットにより河川上から外部の交通状況を観測することを特徴とする交通情報観測システム。
【請求項2】
災害時のにも損傷することなく有効に作動することを特徴とする請求項1の交通情報観測システム。
【請求項3】
都市河川の橋上の状況を観測することを特徴とする請求項1または2の交通情報観測システム。
【請求項1】
水質を浄化する水質浄化部と、水質を測定する水質測定部と、周辺環境をモニタするカメラ部と、水上および/または水中を移動する運動部と、センサ情報を処理する処理部と、信号を伝送する通信部と、外部に表示する表示部とを備える水中ロボットにより河川上から外部の交通状況を観測することを特徴とする交通情報観測システム。
【請求項2】
災害時のにも損傷することなく有効に作動することを特徴とする請求項1の交通情報観測システム。
【請求項3】
都市河川の橋上の状況を観測することを特徴とする請求項1または2の交通情報観測システム。
【図1】


【公開番号】特開2006−79245(P2006−79245A)
【公開日】平成18年3月23日(2006.3.23)
【国際特許分類】
【出願番号】特願2004−260797(P2004−260797)
【出願日】平成16年9月8日(2004.9.8)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成18年3月23日(2006.3.23)
【国際特許分類】
【出願日】平成16年9月8日(2004.9.8)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]