
水中探知装置、水中探知方法、および水中探知プログラム
【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
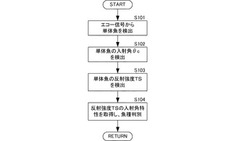
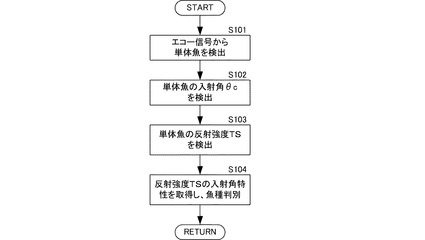
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、水中に超音波信号を送信し、そのエコー信号から探知対象物である魚の情報を取得する水中探知装置、特に、魚種判別を行う水中探知装置および水中探知方法に関する。
【背景技術】
【0002】
従来、魚種判別機能を備える水中探知装置が各種考案されている。例えば、特許文献1に記載の水中探知装置では、エコー信号から、検出した魚群の移動速度を算出し、当該移動速度と、当該魚群の反射強度TS(Target Strength)とから魚種を判別している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−218634号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示す水中探知装置では、魚種判別の正解率が高いとは限らず、魚種を誤判定してしまうことがある。
【0005】
この発明は、従来よりも正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を、提供することにある。
【課題を解決するための手段】
【0006】
この発明の水中探知装置は、送受信部、検出部、および表示部を備える。送受信部は、水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する。検出部は、エコー信号に基づいて、水中移動体に対するエコー信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する。表示部は、複数組の入射角と反射強度との関係を表示する。
【0007】
この構成では、入射角と反射強度との関係が、水中移動体の種類(例えば、魚種)毎に異なることを利用し、このような入射角と反射強度との関係を表示し、ユーザに提供できる。
【0008】
この発明の水中探知装置の検出部は、複数の時刻において、入射角と反射強度との関係を取得する。表示部は、複数の時刻に取得した入射角と反射強度との関係を、同時に表示する。
【0009】
この構成では、ターゲットとなる水中移動体が単一であっても、入射角と反射強度との関係を複数取得でき、これらを表示できる。
【0010】
また、この発明の水中探知装置の検出部は、同一時刻において、入射角と反射強度との関係を複数取得する。表示部は、同一時刻に取得した入射角と反射強度との関係を、複数組、同時に表示する。
【0011】
この構成では、ターゲットとなる水中移動体が複数存在する場合に、同時に、入射角と反射強度との関係を複数取得でき、これらを表示できる。
【0012】
この発明の水中探知装置は、送受信部、検出部および判別部を備える。送受信部は、水中に超音波信号を送信し、当該超音波信号による水中からのエコー信号を受信する。検出部は、エコー信号に基づいて、水中移動体に対する超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する。判別部は、複数組の入射角と反射強度との関係から、水中移動体の種類を判別する。
【0013】
この構成では、超音波信号が水中移動体(例えば魚体)に当たる角度に相当する入射角によって、反射強度が異なることを利用している。さらに、この反射強度の入射角に依存する特性が水中移動体の種類(例えば魚種)によって異なることを利用している。したがって、エコー信号から水中移動体の入射角と反射強度を複数取得することで、水中移動体の種類による反射強度の特徴を判別でき、水中移動体の種類の判別が可能になる。
【0014】
また、この発明の水中探知装置の検出部は、水中移動体検出部、入射角検出部、判別情報生成部と、を備える。水中移動体検出部は、エコー信号の強度から水中移動体の存在を検出する。入射角検出部は、検出された水中移動体の複数タイミングでの位置から入射角を検出する。判別情報生成部は、検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、入射角と反射強度との組を生成する。判別部は、複数の反射強度の入射角軸上での分布から水中移動体の種類を判別する。この構成では、検出部の具体的な構成を示している。
【0015】
また、この発明の水中探知装置の判別部は、入射角軸を一定の入射角幅からなる複数の入射角ビンに分割し、入射角ビン毎の代表値から反射強度の分布特性を取得し、該分布特性から水中移動体の種類を判別する。
【0016】
また、この発明の水中探知装置の判別部は、水中移動体の種類毎に分布特性のテンプレートを予め記憶しており、取得した分布特性と水中移動体の種類毎のテンプレートの分布特性との関係から、水中移動体の種類を判別する。
【0017】
これらの構成では、判別部の具体的な構成を示している。
【0018】
また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の最大値である。また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の平均値である。また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の中心値ある。また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の中央値である。
【0019】
この構成では、入射角ビン毎の代表値の取り方を示している。ここで、代表値として最大値を用いると、他の代表値の取り方よりも魚種の特徴が顕著に現れる。したがって、より正確に魚種を判別することができる。
【0020】
また、この発明の水中探知装置では、分布および取得した分布特性から画像データを生成する表示制御部を備え、表示部は、表示制御部が生成した画像データを表示する。この構成により、魚種判別に関する情報を、ユーザへ分かりやすく提供できる。
【発明の効果】
【0021】
この発明によれば、より正確に魚種を判別することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施形態に係る水中探知装置1の構成を示すブロック図である。
【図2】水中探知装置1の演算処理部14で行われる魚種判別のための全体処理フローを示す図である。
【図3】姿勢角の検出概念を説明するための図である。
【図4】傾角および入射角の検出概念を説明するための図である。
【図5】入射角の設定概念を示す図である。
【図6】魚種判別フローを示すフローチャートである
【図7】反射強度TSの入射角特性の例を示す図である。
【図8】魚種毎の反射強度TSの姿勢角のテンプレート特性(正規化特性曲線)の例を示す図である。
【図9】表示画像の一例を示す図である。
【図10】表示画像の別の一例を示す図である。
【図11】表示画像のさらに別の一例を示す図である。
【発明を実施するための形態】
【0023】
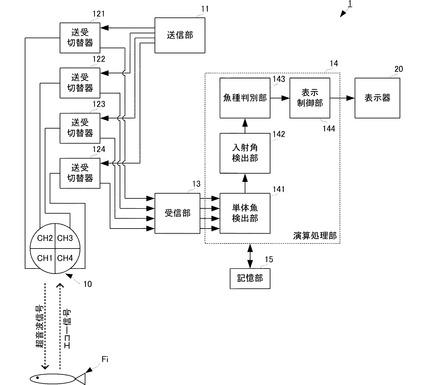
本発明の実施形態に係る水中探知装置および水中探知方法について、図を参照して説明する。図1は本発明の実施形態に係る水中探知装置1の構成を示すブロック図である。
【0024】
水中探知装置1は、送受波器10、送信部11、送受切替器121,122,123,124、受信部13、演算処理部14、記憶部15、操作部16、表示器20を備える。なお、表示器20は、水中探知装置1に必須の構成ではなく、水中探知装置1の外部接続端子に接続される外部の表示装置であってもよい。
【0025】
送受波器10は、船舶の船底等に固定設置されている。送受波器10は、送受切替器121−124を介して送信信号生成部11から与えられた送信信号に基づいて超音波を水中へ送波する。また、送受波器10は、前記超音波が水中の魚Fi等の探知対象物に反射して得られるエコーを受波し、エコー信号を出力する。エコー信号は、送受切替器121−124を介して受信信号生成部13へ入力される。
【0026】
送受波器10は、より具体的には以下の構造を有する。
【0027】
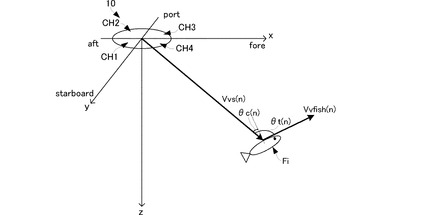
送受波器10は、詳細を図示していない所要数の振動子が束状に一体化されてなる。これらの振動子は、各振動子の振動面が同一平面上に所定パターンで配列されるように、配置されている。受波器10は、送受波面が周方向に4分割されており、各分割面がチャンネルCH1,CH2,CH3,CH4に設定されている。これら、チャンネルCH1,CH2,CH3,CH4は、それぞれ共通の指向特性、特に所定の指向幅、例えば7°の指向幅を有する。
【0028】
送受波器10は、送受波面の全体から超音波を所定の指向性で送波する。送受波器10は、魚Fiのエコーを各チャンネルCH1〜CH4で受波する。
【0029】
各チャンネルCH1〜CH4と船舶方位との関係は、チャンネルCH1とCH4とが船首(force)側であり、チャンネルCH2とCH3とが船尾(aft)側であり、さらに、チャンネルCH1とCH2とが右舷(starboard)側であり、チャンネルCH3とCH4とが左舷(port)側である。これにより、送受波器10は、チャンネルCH1,CH4の組とチャンネルCH2,CH3の組とにより指向幅内において船首−船尾方向のエコーを受波可能にしている。また、送受波器10は、チャンネルCH1,CH2の組とチャンネルCH3,CH4の組とにより、右舷−左舷方向からのエコーを受信可能にしている。
【0030】
送信部11は、FM(周波数変調)の送信信号を生成する。送信信号生成部11は、所定の送信時間幅(例えば数十μ秒の時間幅)において、周波数を所定の範囲内でチャープさせることで送信信号を生成する。例えば、送信信号生成部11は、中心周波数が100KHzで、最低低周波数が70KHz、最高周波数が130KHzであり、最低周波数から最高周波数に向かってチャープする送信信号を生成する。
【0031】
送信部11は、送信信号を送受切替器121−124のそれぞれに出力する。
【0032】
送受信部121−124は、送受波器10の各チャンネルCH1−CH4を構成する各振動子に接続するように設置されている。送受切替器121−124は、送信信号生成部11からの送信信号を送受波器10に出力し、送受波器10の各チャンネルCH1−CH4のエコー信号を、受信部13へ出力する。
【0033】
受信部13は、LNA等を備え、各チャンネルのエコー信号を所定のゲインで増幅して、チャンネル毎のエコー信号を生成する。チャンネル毎のエコー信号は、演算処理部14へ入力される。
【0034】
演算処理部14は、例えばマイクロコンピュータで構成され、記憶部15に記録されている制御プログラムを実行することによって、単体魚検出部141、入射角検出部142、魚種判別部143、および表示制御部144として機能する。図2は演算処理部14で行われる魚種判別のための全体処理フローを示す図である。
【0035】
単体魚検出部141は、図2のステップS101の機能を有し、エコー信号から単体魚を検出する。単体魚検出部141は、各エコー信号を所定のサンプリング周期でサンプリングすることで、深度方向(時間方向)に離散化された強度データであるエコーデータを取得する。単体魚検出部141は、送信タイミング(PING毎)に配列したエコーデータにおける、所定閾値以上のエコーデータを魚からの反射エコーと判断する。
【0036】
単体魚検出部141は、既知のスプリットビームを用いたSSBL(Super ShortBaseline)法を用いて単体魚の位置を検出する。この方法を用いることで、高い分解能で魚Fiを検出できるので、複数の魚が群れて泳ぐ魚群の単位ではなく、当該魚Fi単体の位置を測定することができる。このような魚Fiの検出および位置検出処理は、所定の観測タイミング毎(例えば、所謂1Ping毎)に実行される。
【0037】
単体魚検出部141は、算出した魚Fiの位置を深度方向およびPING方向および順次記憶する。この際、観測値算出部142は、魚Fi毎に観測位置を連結(関連付け)して記憶する。
【0038】
具体的には、例えば、単体魚検出部141は、同じPINGに含まれる深度方向に連続する所定閾値以上のエコーデータを、単一の単体魚から取得したエコーデータ群と判断する。さらに、単体魚検出部141は、超音波信号の送信間隔やビーム幅に基づいて所定数分だけ隣り合う複数のPING間で、閾値以上のエコーデータのつながりが得られた場合には、これらのエコーデータを、単一の単体魚から得られたエコーデータとして記憶する。
【0039】
単体魚検出部141は、単体魚として判断されたエコーデータ群の内、最浅のエコーデータのPING位置および深度を含む情報を、単体魚情報として記憶する。
【0040】
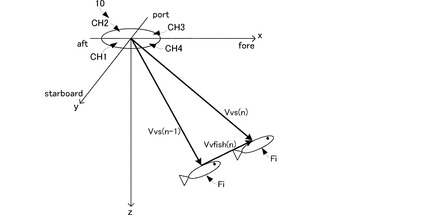
入射角検出部142は、図2のステップS102の機能を有し、単体魚検出部141で検出した単体魚毎に、入射角を検出する。なお、入射角とは、送受波器10からの超音波信号が単体魚Fiに入射する角度を意味し、当該単体魚Fiで反射して得られるエコー信号の出射角と同じである。したがって、以下に示すように、エコー信号から入射角を算出することができる。図3は姿勢角の検出概念を説明するための図である。図4は傾角および入射角の検出概念を説明するための図である。図5は入射角の設定概念を示す図である。
【0041】
入射角検出部142は、単体魚検出部141からの単体魚情報に基づいて、単体魚の位置追尾を行う。具体的には、入射角検出部142は、単体魚と判断した最浅のエコーデータのPING位置および深度の各チャンネルCH1−CH4のエコーデータに基づいて、魚種判定用タイミングnでの魚Fiの三次元位置x(n),y(n),z(n)を算出する。ここで用いる三次元座標は、船尾(aft)側から船首(force)側へ向かう方向を正方向とするx軸と、左舷(port)側から右舷(starboard)側ヘ向かう方向を正方向とするy軸と、送受波器10の底面から海底に向かう方向(深度方向)を正方向とするz軸とにより定義された座標系である。
【0042】
入射角検出部142は、送受波器10の底面の中心を始点(原点)として、魚Fiの位置x(n),y(n),z(n)を終点とする単体魚位置ベクトルVvs(n)={x(n),y(n),z(n)}を取得する。
【0043】
入射角検出部142は、単体魚位置ベクトルVvs(n)を取得する魚種判定用タイミングnから所定時間前の魚種判定用タイミングn−1で、同様の設定で取得した単体魚位置ベクトルVvs(n−1)と、魚種判定用タイミングnの単体魚位置ベクトルVvs(n)とから、単体魚Fiの遊泳ベクトルVvfish(n)を、ベクトル演算式である式1から算出する。なお、魚種判定用タイミングの間隔は、超音波信号の送信間隔(PING間の間隔)や、魚種判別対象となる魚の移動速度に応じて、適宜設定されている。
【0044】
Vvfish(n)=Vvs(n)−Vvs(n−1) −(式1)
入射角検出部142は、単体魚の遊泳ベクトルVvfish(n)に基づいて姿勢角θpを、ベクトル演算式である式2から算出する。
【0045】
【数1】

【0046】
この演算処理により得られる姿勢角θpは、魚種判別の対象となる単体魚または魚群が送受波器10の真下付近に存在する時に、入射角θcと同じである。したがって、送受波器10の真下となる所定範囲内の魚種を識別する場合には、入射角検出部42は、式2で得られた姿勢角θpを入射角θcとして出力する。
【0047】
しかしながら、魚種判別の対象となる単体魚または魚群の位置が、送受波器10の真下方向の所定範囲内でなければ、入射角検出部142は、次に示す方法により、入射角θcを算出する。
【0048】
まず、入射角検出部142は、送受波器10から送信される超音波信号が、対象の単体魚Fiに照射する方向と、単体魚の遊泳方向との成す角である傾角θt(図4参照)を算出する。
【0049】
図4に示すように、傾角θtは、単体魚位置ベクトルVvs(n)と、当該単体魚の遊泳ベクトルVvfish(n)との成す角であり、式3から算出することができる。
【0050】
【数2】
【0051】
なお、式3において、黒のドットマークは、ベクトルの内積を意味する。
【0052】
このように算出された傾角θtは、単体魚Fiの遊泳方向を0°(0rad)とするものである。一方、入射角θcは、図5に示すように、単体魚Fiの背中に直交する方向が0°(0rad)である。このため、傾角θtと入射角θcは、次の関係を有する。
【0053】
θc=θt−π/2 [rad]
したがって、入射角θcは、次式から算出することができる。
【0054】
【数3】
【0055】
このように、単体魚Fiの位置が送受波器10の真下方向の所定範囲内でなくても、入射角検出部142は、検出した単体魚Fiの入射角θcを出力することができる。
【0056】
また、さらに、上述の式4の方法は、より厳密には、上述のxz平面(船首船尾方向と鉛直方向からできる平面)付近に、単体魚Fiが存在し、且つ単体魚Fiがy軸方向(右左舷方向)の運動成分を持たない場合に、高精度な入射角θcの算出が可能になる。このため、y軸(右左舷方向)に沿って前記xz平面から離間した位置に単体魚Fiが存在する場合には、誤差を生じてしまう。
【0057】
しかしながら、例えば、上述の単体魚位置ベクトルVvsと、当該単体魚の遊泳ベクトルVvfishとを、xz平面に射影して平面ベクトルに変換し、当該平面ベクトル同士で、式4の演算を行えば、入射角θcを算出することができる。
【0058】
また、同様に、上述の式4の方法は、より厳密には、上述のyz平面(右左舷方向と鉛直方向からできる平面)付近に、単体魚Fiが存在し、且つ単体魚Fiがx軸方向(船首船尾方向)の運動成分を持たない場合に、高精度な入射角θcの算出が可能になる。このため、x軸(船首船尾方向)に沿って前記yz平面から離間した位置に単体魚Fiが存在する場合には、誤差を生じてしまう。
【0059】
しかしながら、例えば、上述の単体魚位置ベクトルVvsと、当該単体魚の遊泳ベクトルVvfishとを、yz平面に射影して平面ベクトルに変換し、当該平面ベクトル同士で、式4の演算を行えば、入射角θcを算出することができる。
【0060】
このようにして算出された入射角θcは、図5に示すように、単体魚Fiの背中側鉛直方向を0°とし、頭の方向へ傾斜する角度が−方向の角度になり、尾の方向へ傾斜する角度が+方向の角度になるように定義されている。
【0061】
なお、上述の入射角θcの算出方法は、状況に応じていずれの方法を用いてもよく、必要に応じて、複数の方法を組み合わせてもよい。例えば、送受波器10の鉛直下方向の狭い範囲で魚種判別を行う場合には、式2から得られる姿勢角θpを入射角θcとする方法を用いれば、演算処理を簡素化できる。また、送受波器10の鉛直下方向の広い範囲で魚種判別を行う場合には、式4から得られる入射角θcを用いれば、より精度の高い魚種判別が可能になる。
【0062】
さらに、送受波器10の鉛直下方向の広い範囲で魚種判別を行う場合に、送受波器10の鉛直下方向の狭い範囲では式2を用い、当該狭い範囲を除く範囲では式4を用いる方法を適用してもよい。
【0063】
このような入射角θcの検出は、取得した単体魚のそれぞれに対して実行する。
【0064】
魚種判別部143は、図2のステップS103、S104の機能を有し、入射角検出部142で単体魚毎に算出した入射角θcを用いて、魚種判別を行う。
【0065】
魚種判別部143は、単体魚の反射強度TS(Target Strength)を既知の方法で算出する。この際、魚種判別部143は、単体魚を構成するエコーデータの内、代表となる特定のエコーデータを用いて、反射強度TSを算出する。例えば、魚種判別部143は、単体魚のエコー振幅波形の最大値を用いて反射強度TSを算出する。魚種判別部143は、検出された単体魚毎に反射強度TSを算出する。なお、反射強度TSの算出は、単体魚検出以降であればいずれのタイミングに行ってもよい。すなわち、入射角検出前であってもよい。
【0066】
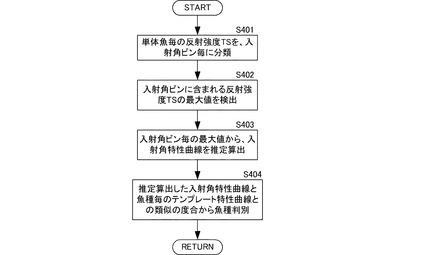
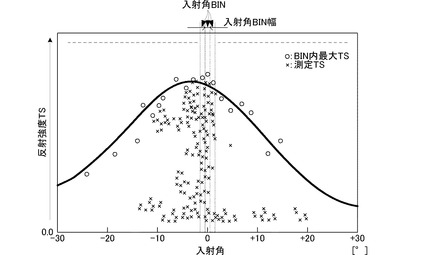
魚種判別部143は、単体魚毎の反射強度TSと入射角θcに基づいて、魚種判別を行う。図6は魚種判別フローを示すフローチャートである。図7は反射強度TSの入射角特性の例を示す図である。図7において、図中の○印は各入射角ビンの最大値を示し、図中の×印は、最大値を除く反射強度TSを示す。なお、入射角ビンの最大値は全てを○で示しているものではなく、本願発明の特徴を分かりやすくするために、図示を省略しているものもある。
【0067】
魚種判別部143は、魚種判定用の入射角範囲(図7の例では、−30°から+30°まで)を設定し、当該入射角範囲を複数の入射角ビンに分割して設定する。例えば、魚種判別部143は、2°の角度幅からなる入射角ビンで、−30°から+30°までの入射角範囲を分割して設定する。
【0068】
魚種判別部143は、取得した各単体魚の反射強度TSを、入射角ビン毎に分類する(S401)。魚種判別部143は、入射角ビン毎に、反射強度TSの最大値を検出する(S402)。
【0069】
魚種判別部143は、各入射角ビンの最大値から、図7の太実線に示すような反射強度の入射角特性曲線を推定算出する(S403)。この際、例えば、魚種判別部143は、所定の関数で各入射角ビンの最大値をフィッティング処理することで、入射角特性曲線を推定算出すればよい。
【0070】
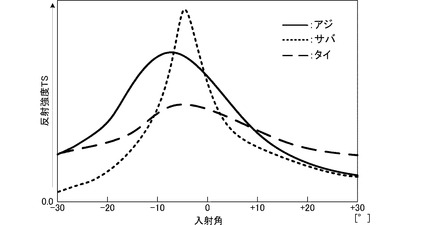
魚種判別部143は、推定算出した入射角特性曲線と、図8に示すような魚種毎の反射強度TSの入射角のテンプレート特性曲線とを比較する。図8は、魚種毎の反射強度TSの入射角のテンプレート特性曲線(正規化特性曲線)の例を示す図である。
【0071】
図8に示すように、反射強度TSの入射角特性は、魚種毎に特徴を有する。例えば、アジの場合、入射角0°よりも負の入射角側に、緩やかな極大を有する特性となる。また、サバの場合、入射角0°に近い負の入射角側に、急峻な極大を有する特性となる。さらに、タイの場合、入射角−30°から+30°の間に若干の極大はあるものの、アジ、サバと比較して全体的に平坦な特性となる。なお、これらアジ、サバ、タイの反射強度TSの入射角特性は、アジ、サバ、タイの生け簀に、上述の超音波信号を送信し、単体魚検出、入射角検出、反射強度TS算出を行い、入射角毎の反射強度TSの最大値を得て、算出した特性である。
【0072】
魚種判別部143は、推定算出した入射角特性曲線を正規化し、正規化した入射角特性曲線と、図8に示すテンプレート特性曲線との類似度を算出して魚種判定を行う(S404)。例えば、魚種判別部143は、推定算出した入射角特性曲線と、図8に示すテンプレート特性曲線とのユークリッド距離を算出する。
【0073】
より具体的には、魚種判別部143は、各入射角ビンjの中心角における推定算出した反射強度TSの値TSjと、テンプレート特性曲線の反射強度の値TSTjとを用いて、ユークリッド距離d(TS,TST)を次式から算出する。なお、jは、魚種判別に利用する入射角ビンを、角度が大きくなる方向にしたがって順次並べた場合の番号であり、j=1〜N(Nは魚種判別に利用する入射角ビンの数)である。
【0074】
【数4】
【0075】
魚種判別部143は、最もユークリッド距離が近い(小さい)テンプレート特性曲線が、推定算出した入射角特性曲線に最も類似していると判断し、最もユークリッド距離が近い(小さい)テンプレート特性曲線に対応する魚種を選択する。
【0076】
そして、魚種判別部143は、選択した魚種を、探知した単体魚およびこれを含む魚群の魚種として判定する。例えば、図7の入射角特性曲線を得た場合に、探知した単体魚およびこれを含む魚群を、「アジ」と判定する。
【0077】
以上のように、本実施形態の構成および処理を用いることで、魚種を正確に判定することができる。
【0078】
演算処理部14の表示制御部144は、取得した魚種名と、上述の図7に示すような反射強度TSの入射角特性とを、画像データ化して、表示器20へ出力する。この際、表示制御部144は、詳細を図示していないが、既知の方法で得られるPINGおよび深度の二次元座標からなる探知画像に、上述の魚種名と反射強度TSの入射角特性とを重ね合わせて画像データを形成してもよい。表示器20は、表示制御部144からの画像データを、画面上に表示する。
【0079】
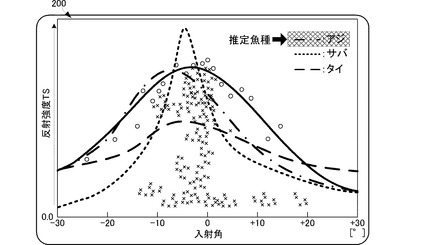
図9は表示画像の一例を示す図である。図9に示すように、画像200には、エコー信号から取得した反射強度TSの入射角分布が、特定マーク(図9では×印と○印)で表示される。また、画像200には、推定算出した入射角特性曲線と、魚種毎のテンプレート特性曲線とが表示される。さらに、画像200には、推定した魚種が強調表示される。このような画像200を表示することで、ユーザは検出した魚群や単体魚の魚種を、容易に識別することができる。
【0080】
なお、図9では、魚種判別用の画像のみを表示する例を示したが、通常のエコー画像、すなわちPING方向と深度方向の二次元座標からなるエコー画像と、魚種判別用の画像とを同時に表示してもよい。
【0081】
なお、上述の説明では、多数の単体魚の反射強度TSから魚種判別を行う例を示したが、入射角θcと反射強度TSとの組が少なくとも二組検出できれば、魚種判別は可能である。この場合、同じ魚群内に含まれる複数の単体魚から、入射角θcと反射強度TSとの組を複数取得してもよいし、単一の単体魚から、所定時間間隔をおいて、入射角θcと反射強度TSとの組を複数取得してもよい。特に、後者の場合には、単体魚が魚群を形成せず、単体で遊泳している場合にも、魚種判別を行うことができる。
【0082】
また、上述の説明では、特性曲線の類似の度合いから魚種を判定する例を示したが、他の方法で類似度を検出してもよい。
【0083】
例えば、特性曲線の半値全幅を用いて、類似の度合いを検出してもよい。すなわち、算出した反射強度TSの入射角特性の半値全幅に最も近い半値全幅からなるテンプレート特性に対応する魚種を、探知した単体魚およびこれを含む魚群の魚種と判断する。
【0084】
また、別の方法としては、例えば、特性曲線の半値全幅と最大値を算出し、これらから取得した反射強度TS群の入射角軸上の広がりを表す指標値を算出する。例えば、半値全幅を最大値で除算する等の算出処理を行う。そして、同様の算出方法で得られる基準指標値を予め魚種毎に取得しておき、魚種毎に取り得る基準指標値範囲を設定しておく。次に、エコー信号から取得した指標値が、いずれの魚種の基準指標値範囲内にあるかを判断する。エコー信号から取得した指標値が含まれる基準指標値範囲に該当する魚種を、エコー信号で検出した魚群や単体魚の魚種と判断する。
【0085】
なお、上述の説明では、入射角ビン毎に反射強度TSの最大値を検出して、入射角ビン毎の代表値に設定する例を示したが、入射角ビン毎に他の代表値を算出し、魚種判別に利用してもよい。例えば、代表値として、平均値、中央値、中心値等を用いてもよい。
【0086】
平均値の場合、入射角ビンに含まれる全て反射強度TSを加算し、取得した反射強度TSの個数で除算する。
【0087】
中央値の場合、入射角ビンに含まれる全ての反射強度TSを強度順にならべ、真ん中の順番となる反射強度TSを用いる。例えば、入射角ビンに含まれる反射強度TSの全数が5であれば、強度順に並ぶ3番目の反射強度を用いる。
【0088】
中間値の場合、入射角ビンに含まれる全ての反射強度TSから最大値と最小値を算出し、最大値と最小値を加算して2で除算する。
【0089】
また、上述の説明では、スプリットビームを用いたSSBL法を用いて単体魚の位置を検出したが、三次元位置を検出できる方法であれば、ソナー等を用いた他の方法を用いてもよい。
【0090】
また、上述の説明では、魚種判別までを行う水中探知装置を例に示したが、魚種判別に有用な情報を表示する装置としても利用することができる。この場合、魚種判別部143を省略し、入射角θcと反射強度TSとの関係のみを表示制御部144へ入力すればよい。図10は、表示画像の別の一例を示す図である。また、図11は、表示画像のさらに別の一例を示す図である。
【0091】
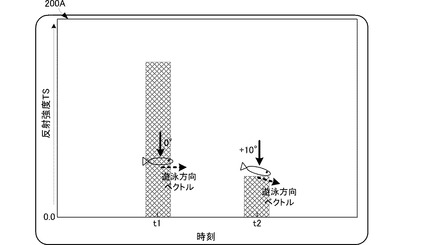
図10に示す画像200Aは、異なる複数の時刻t1,t2で同じ単体魚から反射強度TSと入射角θcとの関係を取得した場合に生成する画像である。画像200Aでは、時刻t1,t2毎の反射強度TSが棒グラフで表示されている。さらに、時刻t1,t2毎の入射角θcも模式的且つ数値で表示されている。なお、図10の画像200Aでは、分かりやすいように、各時刻t1,t2での単体魚の遊泳ベクトル(遊泳方向)も表示しているが、省略してもよい。また、この表示方法は一例であり、異なる複数の時刻に得られる反射強度TSと入射角θcとの関係が図示されていれば、他の態様でもよい。
【0092】
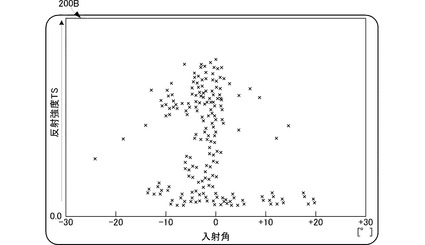
図11に示す画像200Bは、同一時刻で複数の単体魚を検出し、これら複数の単体魚毎に反射強度TSと入射角θcとの関係を取得した場合に生成する画像である。画像200Bでは、入射角θcを横軸とし、反射強度TSを縦軸として、分散図が表示されている。図中の×印が、検出した入射角θcと反射強度TSの組の位置を示す。なお、この表示方法も一例であり、同一時刻で得られた複数の単体魚毎の反射強度TSと入射角θcとの関係が図示されていれば、他の態様でもよい。
【0093】
また、上述の説明では、反射強度をエコー信号の最大値から算出する例を示したが、具体的には、次に示す各方法で反射強度を算出すればよい。
【0094】
・検出した単体魚Fiのエコー信号の値を所定時間長積分した積分値から反射強度を算出する。
【0095】
・検出した単体魚Fiのエコー信号の周波数スペクトルを取得し、当該周波数スペクトルの最大値から反射強度を算出する。
【0096】
・検出した単体魚Fiのエコー信号の周波数スペクトルを取得し、当該周波数スペクトルの平均値から反射強度を算出する。
【0097】
また、上述の説明では、単体魚を対象として検出する例を示したが、他の水中移動体に対して、上述の構成および処理を適用することができる。
【符号の説明】
【0098】
1:水中探知装置、10:送受波器、11:送信信号生成部、121,122,123,124:送受切替器、13:受信信号生成部、14:演算処理部、141:単体魚検出部、142:姿勢角検出部、143:魚種判別部、144:表示制御部、15:記憶部、20:表示器、200,200A,200B:画像
【技術分野】
【0001】
本発明は、水中に超音波信号を送信し、そのエコー信号から探知対象物である魚の情報を取得する水中探知装置、特に、魚種判別を行う水中探知装置および水中探知方法に関する。
【背景技術】
【0002】
従来、魚種判別機能を備える水中探知装置が各種考案されている。例えば、特許文献1に記載の水中探知装置では、エコー信号から、検出した魚群の移動速度を算出し、当該移動速度と、当該魚群の反射強度TS(Target Strength)とから魚種を判別している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−218634号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示す水中探知装置では、魚種判別の正解率が高いとは限らず、魚種を誤判定してしまうことがある。
【0005】
この発明は、従来よりも正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を、提供することにある。
【課題を解決するための手段】
【0006】
この発明の水中探知装置は、送受信部、検出部、および表示部を備える。送受信部は、水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する。検出部は、エコー信号に基づいて、水中移動体に対するエコー信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する。表示部は、複数組の入射角と反射強度との関係を表示する。
【0007】
この構成では、入射角と反射強度との関係が、水中移動体の種類(例えば、魚種)毎に異なることを利用し、このような入射角と反射強度との関係を表示し、ユーザに提供できる。
【0008】
この発明の水中探知装置の検出部は、複数の時刻において、入射角と反射強度との関係を取得する。表示部は、複数の時刻に取得した入射角と反射強度との関係を、同時に表示する。
【0009】
この構成では、ターゲットとなる水中移動体が単一であっても、入射角と反射強度との関係を複数取得でき、これらを表示できる。
【0010】
また、この発明の水中探知装置の検出部は、同一時刻において、入射角と反射強度との関係を複数取得する。表示部は、同一時刻に取得した入射角と反射強度との関係を、複数組、同時に表示する。
【0011】
この構成では、ターゲットとなる水中移動体が複数存在する場合に、同時に、入射角と反射強度との関係を複数取得でき、これらを表示できる。
【0012】
この発明の水中探知装置は、送受信部、検出部および判別部を備える。送受信部は、水中に超音波信号を送信し、当該超音波信号による水中からのエコー信号を受信する。検出部は、エコー信号に基づいて、水中移動体に対する超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する。判別部は、複数組の入射角と反射強度との関係から、水中移動体の種類を判別する。
【0013】
この構成では、超音波信号が水中移動体(例えば魚体)に当たる角度に相当する入射角によって、反射強度が異なることを利用している。さらに、この反射強度の入射角に依存する特性が水中移動体の種類(例えば魚種)によって異なることを利用している。したがって、エコー信号から水中移動体の入射角と反射強度を複数取得することで、水中移動体の種類による反射強度の特徴を判別でき、水中移動体の種類の判別が可能になる。
【0014】
また、この発明の水中探知装置の検出部は、水中移動体検出部、入射角検出部、判別情報生成部と、を備える。水中移動体検出部は、エコー信号の強度から水中移動体の存在を検出する。入射角検出部は、検出された水中移動体の複数タイミングでの位置から入射角を検出する。判別情報生成部は、検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、入射角と反射強度との組を生成する。判別部は、複数の反射強度の入射角軸上での分布から水中移動体の種類を判別する。この構成では、検出部の具体的な構成を示している。
【0015】
また、この発明の水中探知装置の判別部は、入射角軸を一定の入射角幅からなる複数の入射角ビンに分割し、入射角ビン毎の代表値から反射強度の分布特性を取得し、該分布特性から水中移動体の種類を判別する。
【0016】
また、この発明の水中探知装置の判別部は、水中移動体の種類毎に分布特性のテンプレートを予め記憶しており、取得した分布特性と水中移動体の種類毎のテンプレートの分布特性との関係から、水中移動体の種類を判別する。
【0017】
これらの構成では、判別部の具体的な構成を示している。
【0018】
また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の最大値である。また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の平均値である。また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の中心値ある。また、この水中探知装置では、代表値は、入射角ビン内に含まれる複数の反射強度の中央値である。
【0019】
この構成では、入射角ビン毎の代表値の取り方を示している。ここで、代表値として最大値を用いると、他の代表値の取り方よりも魚種の特徴が顕著に現れる。したがって、より正確に魚種を判別することができる。
【0020】
また、この発明の水中探知装置では、分布および取得した分布特性から画像データを生成する表示制御部を備え、表示部は、表示制御部が生成した画像データを表示する。この構成により、魚種判別に関する情報を、ユーザへ分かりやすく提供できる。
【発明の効果】
【0021】
この発明によれば、より正確に魚種を判別することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施形態に係る水中探知装置1の構成を示すブロック図である。
【図2】水中探知装置1の演算処理部14で行われる魚種判別のための全体処理フローを示す図である。
【図3】姿勢角の検出概念を説明するための図である。
【図4】傾角および入射角の検出概念を説明するための図である。
【図5】入射角の設定概念を示す図である。
【図6】魚種判別フローを示すフローチャートである
【図7】反射強度TSの入射角特性の例を示す図である。
【図8】魚種毎の反射強度TSの姿勢角のテンプレート特性(正規化特性曲線)の例を示す図である。
【図9】表示画像の一例を示す図である。
【図10】表示画像の別の一例を示す図である。
【図11】表示画像のさらに別の一例を示す図である。
【発明を実施するための形態】
【0023】
本発明の実施形態に係る水中探知装置および水中探知方法について、図を参照して説明する。図1は本発明の実施形態に係る水中探知装置1の構成を示すブロック図である。
【0024】
水中探知装置1は、送受波器10、送信部11、送受切替器121,122,123,124、受信部13、演算処理部14、記憶部15、操作部16、表示器20を備える。なお、表示器20は、水中探知装置1に必須の構成ではなく、水中探知装置1の外部接続端子に接続される外部の表示装置であってもよい。
【0025】
送受波器10は、船舶の船底等に固定設置されている。送受波器10は、送受切替器121−124を介して送信信号生成部11から与えられた送信信号に基づいて超音波を水中へ送波する。また、送受波器10は、前記超音波が水中の魚Fi等の探知対象物に反射して得られるエコーを受波し、エコー信号を出力する。エコー信号は、送受切替器121−124を介して受信信号生成部13へ入力される。
【0026】
送受波器10は、より具体的には以下の構造を有する。
【0027】
送受波器10は、詳細を図示していない所要数の振動子が束状に一体化されてなる。これらの振動子は、各振動子の振動面が同一平面上に所定パターンで配列されるように、配置されている。受波器10は、送受波面が周方向に4分割されており、各分割面がチャンネルCH1,CH2,CH3,CH4に設定されている。これら、チャンネルCH1,CH2,CH3,CH4は、それぞれ共通の指向特性、特に所定の指向幅、例えば7°の指向幅を有する。
【0028】
送受波器10は、送受波面の全体から超音波を所定の指向性で送波する。送受波器10は、魚Fiのエコーを各チャンネルCH1〜CH4で受波する。
【0029】
各チャンネルCH1〜CH4と船舶方位との関係は、チャンネルCH1とCH4とが船首(force)側であり、チャンネルCH2とCH3とが船尾(aft)側であり、さらに、チャンネルCH1とCH2とが右舷(starboard)側であり、チャンネルCH3とCH4とが左舷(port)側である。これにより、送受波器10は、チャンネルCH1,CH4の組とチャンネルCH2,CH3の組とにより指向幅内において船首−船尾方向のエコーを受波可能にしている。また、送受波器10は、チャンネルCH1,CH2の組とチャンネルCH3,CH4の組とにより、右舷−左舷方向からのエコーを受信可能にしている。
【0030】
送信部11は、FM(周波数変調)の送信信号を生成する。送信信号生成部11は、所定の送信時間幅(例えば数十μ秒の時間幅)において、周波数を所定の範囲内でチャープさせることで送信信号を生成する。例えば、送信信号生成部11は、中心周波数が100KHzで、最低低周波数が70KHz、最高周波数が130KHzであり、最低周波数から最高周波数に向かってチャープする送信信号を生成する。
【0031】
送信部11は、送信信号を送受切替器121−124のそれぞれに出力する。
【0032】
送受信部121−124は、送受波器10の各チャンネルCH1−CH4を構成する各振動子に接続するように設置されている。送受切替器121−124は、送信信号生成部11からの送信信号を送受波器10に出力し、送受波器10の各チャンネルCH1−CH4のエコー信号を、受信部13へ出力する。
【0033】
受信部13は、LNA等を備え、各チャンネルのエコー信号を所定のゲインで増幅して、チャンネル毎のエコー信号を生成する。チャンネル毎のエコー信号は、演算処理部14へ入力される。
【0034】
演算処理部14は、例えばマイクロコンピュータで構成され、記憶部15に記録されている制御プログラムを実行することによって、単体魚検出部141、入射角検出部142、魚種判別部143、および表示制御部144として機能する。図2は演算処理部14で行われる魚種判別のための全体処理フローを示す図である。
【0035】
単体魚検出部141は、図2のステップS101の機能を有し、エコー信号から単体魚を検出する。単体魚検出部141は、各エコー信号を所定のサンプリング周期でサンプリングすることで、深度方向(時間方向)に離散化された強度データであるエコーデータを取得する。単体魚検出部141は、送信タイミング(PING毎)に配列したエコーデータにおける、所定閾値以上のエコーデータを魚からの反射エコーと判断する。
【0036】
単体魚検出部141は、既知のスプリットビームを用いたSSBL(Super ShortBaseline)法を用いて単体魚の位置を検出する。この方法を用いることで、高い分解能で魚Fiを検出できるので、複数の魚が群れて泳ぐ魚群の単位ではなく、当該魚Fi単体の位置を測定することができる。このような魚Fiの検出および位置検出処理は、所定の観測タイミング毎(例えば、所謂1Ping毎)に実行される。
【0037】
単体魚検出部141は、算出した魚Fiの位置を深度方向およびPING方向および順次記憶する。この際、観測値算出部142は、魚Fi毎に観測位置を連結(関連付け)して記憶する。
【0038】
具体的には、例えば、単体魚検出部141は、同じPINGに含まれる深度方向に連続する所定閾値以上のエコーデータを、単一の単体魚から取得したエコーデータ群と判断する。さらに、単体魚検出部141は、超音波信号の送信間隔やビーム幅に基づいて所定数分だけ隣り合う複数のPING間で、閾値以上のエコーデータのつながりが得られた場合には、これらのエコーデータを、単一の単体魚から得られたエコーデータとして記憶する。
【0039】
単体魚検出部141は、単体魚として判断されたエコーデータ群の内、最浅のエコーデータのPING位置および深度を含む情報を、単体魚情報として記憶する。
【0040】
入射角検出部142は、図2のステップS102の機能を有し、単体魚検出部141で検出した単体魚毎に、入射角を検出する。なお、入射角とは、送受波器10からの超音波信号が単体魚Fiに入射する角度を意味し、当該単体魚Fiで反射して得られるエコー信号の出射角と同じである。したがって、以下に示すように、エコー信号から入射角を算出することができる。図3は姿勢角の検出概念を説明するための図である。図4は傾角および入射角の検出概念を説明するための図である。図5は入射角の設定概念を示す図である。
【0041】
入射角検出部142は、単体魚検出部141からの単体魚情報に基づいて、単体魚の位置追尾を行う。具体的には、入射角検出部142は、単体魚と判断した最浅のエコーデータのPING位置および深度の各チャンネルCH1−CH4のエコーデータに基づいて、魚種判定用タイミングnでの魚Fiの三次元位置x(n),y(n),z(n)を算出する。ここで用いる三次元座標は、船尾(aft)側から船首(force)側へ向かう方向を正方向とするx軸と、左舷(port)側から右舷(starboard)側ヘ向かう方向を正方向とするy軸と、送受波器10の底面から海底に向かう方向(深度方向)を正方向とするz軸とにより定義された座標系である。
【0042】
入射角検出部142は、送受波器10の底面の中心を始点(原点)として、魚Fiの位置x(n),y(n),z(n)を終点とする単体魚位置ベクトルVvs(n)={x(n),y(n),z(n)}を取得する。
【0043】
入射角検出部142は、単体魚位置ベクトルVvs(n)を取得する魚種判定用タイミングnから所定時間前の魚種判定用タイミングn−1で、同様の設定で取得した単体魚位置ベクトルVvs(n−1)と、魚種判定用タイミングnの単体魚位置ベクトルVvs(n)とから、単体魚Fiの遊泳ベクトルVvfish(n)を、ベクトル演算式である式1から算出する。なお、魚種判定用タイミングの間隔は、超音波信号の送信間隔(PING間の間隔)や、魚種判別対象となる魚の移動速度に応じて、適宜設定されている。
【0044】
Vvfish(n)=Vvs(n)−Vvs(n−1) −(式1)
入射角検出部142は、単体魚の遊泳ベクトルVvfish(n)に基づいて姿勢角θpを、ベクトル演算式である式2から算出する。
【0045】
【数1】
【0046】
この演算処理により得られる姿勢角θpは、魚種判別の対象となる単体魚または魚群が送受波器10の真下付近に存在する時に、入射角θcと同じである。したがって、送受波器10の真下となる所定範囲内の魚種を識別する場合には、入射角検出部42は、式2で得られた姿勢角θpを入射角θcとして出力する。
【0047】
しかしながら、魚種判別の対象となる単体魚または魚群の位置が、送受波器10の真下方向の所定範囲内でなければ、入射角検出部142は、次に示す方法により、入射角θcを算出する。
【0048】
まず、入射角検出部142は、送受波器10から送信される超音波信号が、対象の単体魚Fiに照射する方向と、単体魚の遊泳方向との成す角である傾角θt(図4参照)を算出する。
【0049】
図4に示すように、傾角θtは、単体魚位置ベクトルVvs(n)と、当該単体魚の遊泳ベクトルVvfish(n)との成す角であり、式3から算出することができる。
【0050】
【数2】
【0051】
なお、式3において、黒のドットマークは、ベクトルの内積を意味する。
【0052】
このように算出された傾角θtは、単体魚Fiの遊泳方向を0°(0rad)とするものである。一方、入射角θcは、図5に示すように、単体魚Fiの背中に直交する方向が0°(0rad)である。このため、傾角θtと入射角θcは、次の関係を有する。
【0053】
θc=θt−π/2 [rad]
したがって、入射角θcは、次式から算出することができる。
【0054】
【数3】
【0055】
このように、単体魚Fiの位置が送受波器10の真下方向の所定範囲内でなくても、入射角検出部142は、検出した単体魚Fiの入射角θcを出力することができる。
【0056】
また、さらに、上述の式4の方法は、より厳密には、上述のxz平面(船首船尾方向と鉛直方向からできる平面)付近に、単体魚Fiが存在し、且つ単体魚Fiがy軸方向(右左舷方向)の運動成分を持たない場合に、高精度な入射角θcの算出が可能になる。このため、y軸(右左舷方向)に沿って前記xz平面から離間した位置に単体魚Fiが存在する場合には、誤差を生じてしまう。
【0057】
しかしながら、例えば、上述の単体魚位置ベクトルVvsと、当該単体魚の遊泳ベクトルVvfishとを、xz平面に射影して平面ベクトルに変換し、当該平面ベクトル同士で、式4の演算を行えば、入射角θcを算出することができる。
【0058】
また、同様に、上述の式4の方法は、より厳密には、上述のyz平面(右左舷方向と鉛直方向からできる平面)付近に、単体魚Fiが存在し、且つ単体魚Fiがx軸方向(船首船尾方向)の運動成分を持たない場合に、高精度な入射角θcの算出が可能になる。このため、x軸(船首船尾方向)に沿って前記yz平面から離間した位置に単体魚Fiが存在する場合には、誤差を生じてしまう。
【0059】
しかしながら、例えば、上述の単体魚位置ベクトルVvsと、当該単体魚の遊泳ベクトルVvfishとを、yz平面に射影して平面ベクトルに変換し、当該平面ベクトル同士で、式4の演算を行えば、入射角θcを算出することができる。
【0060】
このようにして算出された入射角θcは、図5に示すように、単体魚Fiの背中側鉛直方向を0°とし、頭の方向へ傾斜する角度が−方向の角度になり、尾の方向へ傾斜する角度が+方向の角度になるように定義されている。
【0061】
なお、上述の入射角θcの算出方法は、状況に応じていずれの方法を用いてもよく、必要に応じて、複数の方法を組み合わせてもよい。例えば、送受波器10の鉛直下方向の狭い範囲で魚種判別を行う場合には、式2から得られる姿勢角θpを入射角θcとする方法を用いれば、演算処理を簡素化できる。また、送受波器10の鉛直下方向の広い範囲で魚種判別を行う場合には、式4から得られる入射角θcを用いれば、より精度の高い魚種判別が可能になる。
【0062】
さらに、送受波器10の鉛直下方向の広い範囲で魚種判別を行う場合に、送受波器10の鉛直下方向の狭い範囲では式2を用い、当該狭い範囲を除く範囲では式4を用いる方法を適用してもよい。
【0063】
このような入射角θcの検出は、取得した単体魚のそれぞれに対して実行する。
【0064】
魚種判別部143は、図2のステップS103、S104の機能を有し、入射角検出部142で単体魚毎に算出した入射角θcを用いて、魚種判別を行う。
【0065】
魚種判別部143は、単体魚の反射強度TS(Target Strength)を既知の方法で算出する。この際、魚種判別部143は、単体魚を構成するエコーデータの内、代表となる特定のエコーデータを用いて、反射強度TSを算出する。例えば、魚種判別部143は、単体魚のエコー振幅波形の最大値を用いて反射強度TSを算出する。魚種判別部143は、検出された単体魚毎に反射強度TSを算出する。なお、反射強度TSの算出は、単体魚検出以降であればいずれのタイミングに行ってもよい。すなわち、入射角検出前であってもよい。
【0066】
魚種判別部143は、単体魚毎の反射強度TSと入射角θcに基づいて、魚種判別を行う。図6は魚種判別フローを示すフローチャートである。図7は反射強度TSの入射角特性の例を示す図である。図7において、図中の○印は各入射角ビンの最大値を示し、図中の×印は、最大値を除く反射強度TSを示す。なお、入射角ビンの最大値は全てを○で示しているものではなく、本願発明の特徴を分かりやすくするために、図示を省略しているものもある。
【0067】
魚種判別部143は、魚種判定用の入射角範囲(図7の例では、−30°から+30°まで)を設定し、当該入射角範囲を複数の入射角ビンに分割して設定する。例えば、魚種判別部143は、2°の角度幅からなる入射角ビンで、−30°から+30°までの入射角範囲を分割して設定する。
【0068】
魚種判別部143は、取得した各単体魚の反射強度TSを、入射角ビン毎に分類する(S401)。魚種判別部143は、入射角ビン毎に、反射強度TSの最大値を検出する(S402)。
【0069】
魚種判別部143は、各入射角ビンの最大値から、図7の太実線に示すような反射強度の入射角特性曲線を推定算出する(S403)。この際、例えば、魚種判別部143は、所定の関数で各入射角ビンの最大値をフィッティング処理することで、入射角特性曲線を推定算出すればよい。
【0070】
魚種判別部143は、推定算出した入射角特性曲線と、図8に示すような魚種毎の反射強度TSの入射角のテンプレート特性曲線とを比較する。図8は、魚種毎の反射強度TSの入射角のテンプレート特性曲線(正規化特性曲線)の例を示す図である。
【0071】
図8に示すように、反射強度TSの入射角特性は、魚種毎に特徴を有する。例えば、アジの場合、入射角0°よりも負の入射角側に、緩やかな極大を有する特性となる。また、サバの場合、入射角0°に近い負の入射角側に、急峻な極大を有する特性となる。さらに、タイの場合、入射角−30°から+30°の間に若干の極大はあるものの、アジ、サバと比較して全体的に平坦な特性となる。なお、これらアジ、サバ、タイの反射強度TSの入射角特性は、アジ、サバ、タイの生け簀に、上述の超音波信号を送信し、単体魚検出、入射角検出、反射強度TS算出を行い、入射角毎の反射強度TSの最大値を得て、算出した特性である。
【0072】
魚種判別部143は、推定算出した入射角特性曲線を正規化し、正規化した入射角特性曲線と、図8に示すテンプレート特性曲線との類似度を算出して魚種判定を行う(S404)。例えば、魚種判別部143は、推定算出した入射角特性曲線と、図8に示すテンプレート特性曲線とのユークリッド距離を算出する。
【0073】
より具体的には、魚種判別部143は、各入射角ビンjの中心角における推定算出した反射強度TSの値TSjと、テンプレート特性曲線の反射強度の値TSTjとを用いて、ユークリッド距離d(TS,TST)を次式から算出する。なお、jは、魚種判別に利用する入射角ビンを、角度が大きくなる方向にしたがって順次並べた場合の番号であり、j=1〜N(Nは魚種判別に利用する入射角ビンの数)である。
【0074】
【数4】
【0075】
魚種判別部143は、最もユークリッド距離が近い(小さい)テンプレート特性曲線が、推定算出した入射角特性曲線に最も類似していると判断し、最もユークリッド距離が近い(小さい)テンプレート特性曲線に対応する魚種を選択する。
【0076】
そして、魚種判別部143は、選択した魚種を、探知した単体魚およびこれを含む魚群の魚種として判定する。例えば、図7の入射角特性曲線を得た場合に、探知した単体魚およびこれを含む魚群を、「アジ」と判定する。
【0077】
以上のように、本実施形態の構成および処理を用いることで、魚種を正確に判定することができる。
【0078】
演算処理部14の表示制御部144は、取得した魚種名と、上述の図7に示すような反射強度TSの入射角特性とを、画像データ化して、表示器20へ出力する。この際、表示制御部144は、詳細を図示していないが、既知の方法で得られるPINGおよび深度の二次元座標からなる探知画像に、上述の魚種名と反射強度TSの入射角特性とを重ね合わせて画像データを形成してもよい。表示器20は、表示制御部144からの画像データを、画面上に表示する。
【0079】
図9は表示画像の一例を示す図である。図9に示すように、画像200には、エコー信号から取得した反射強度TSの入射角分布が、特定マーク(図9では×印と○印)で表示される。また、画像200には、推定算出した入射角特性曲線と、魚種毎のテンプレート特性曲線とが表示される。さらに、画像200には、推定した魚種が強調表示される。このような画像200を表示することで、ユーザは検出した魚群や単体魚の魚種を、容易に識別することができる。
【0080】
なお、図9では、魚種判別用の画像のみを表示する例を示したが、通常のエコー画像、すなわちPING方向と深度方向の二次元座標からなるエコー画像と、魚種判別用の画像とを同時に表示してもよい。
【0081】
なお、上述の説明では、多数の単体魚の反射強度TSから魚種判別を行う例を示したが、入射角θcと反射強度TSとの組が少なくとも二組検出できれば、魚種判別は可能である。この場合、同じ魚群内に含まれる複数の単体魚から、入射角θcと反射強度TSとの組を複数取得してもよいし、単一の単体魚から、所定時間間隔をおいて、入射角θcと反射強度TSとの組を複数取得してもよい。特に、後者の場合には、単体魚が魚群を形成せず、単体で遊泳している場合にも、魚種判別を行うことができる。
【0082】
また、上述の説明では、特性曲線の類似の度合いから魚種を判定する例を示したが、他の方法で類似度を検出してもよい。
【0083】
例えば、特性曲線の半値全幅を用いて、類似の度合いを検出してもよい。すなわち、算出した反射強度TSの入射角特性の半値全幅に最も近い半値全幅からなるテンプレート特性に対応する魚種を、探知した単体魚およびこれを含む魚群の魚種と判断する。
【0084】
また、別の方法としては、例えば、特性曲線の半値全幅と最大値を算出し、これらから取得した反射強度TS群の入射角軸上の広がりを表す指標値を算出する。例えば、半値全幅を最大値で除算する等の算出処理を行う。そして、同様の算出方法で得られる基準指標値を予め魚種毎に取得しておき、魚種毎に取り得る基準指標値範囲を設定しておく。次に、エコー信号から取得した指標値が、いずれの魚種の基準指標値範囲内にあるかを判断する。エコー信号から取得した指標値が含まれる基準指標値範囲に該当する魚種を、エコー信号で検出した魚群や単体魚の魚種と判断する。
【0085】
なお、上述の説明では、入射角ビン毎に反射強度TSの最大値を検出して、入射角ビン毎の代表値に設定する例を示したが、入射角ビン毎に他の代表値を算出し、魚種判別に利用してもよい。例えば、代表値として、平均値、中央値、中心値等を用いてもよい。
【0086】
平均値の場合、入射角ビンに含まれる全て反射強度TSを加算し、取得した反射強度TSの個数で除算する。
【0087】
中央値の場合、入射角ビンに含まれる全ての反射強度TSを強度順にならべ、真ん中の順番となる反射強度TSを用いる。例えば、入射角ビンに含まれる反射強度TSの全数が5であれば、強度順に並ぶ3番目の反射強度を用いる。
【0088】
中間値の場合、入射角ビンに含まれる全ての反射強度TSから最大値と最小値を算出し、最大値と最小値を加算して2で除算する。
【0089】
また、上述の説明では、スプリットビームを用いたSSBL法を用いて単体魚の位置を検出したが、三次元位置を検出できる方法であれば、ソナー等を用いた他の方法を用いてもよい。
【0090】
また、上述の説明では、魚種判別までを行う水中探知装置を例に示したが、魚種判別に有用な情報を表示する装置としても利用することができる。この場合、魚種判別部143を省略し、入射角θcと反射強度TSとの関係のみを表示制御部144へ入力すればよい。図10は、表示画像の別の一例を示す図である。また、図11は、表示画像のさらに別の一例を示す図である。
【0091】
図10に示す画像200Aは、異なる複数の時刻t1,t2で同じ単体魚から反射強度TSと入射角θcとの関係を取得した場合に生成する画像である。画像200Aでは、時刻t1,t2毎の反射強度TSが棒グラフで表示されている。さらに、時刻t1,t2毎の入射角θcも模式的且つ数値で表示されている。なお、図10の画像200Aでは、分かりやすいように、各時刻t1,t2での単体魚の遊泳ベクトル(遊泳方向)も表示しているが、省略してもよい。また、この表示方法は一例であり、異なる複数の時刻に得られる反射強度TSと入射角θcとの関係が図示されていれば、他の態様でもよい。
【0092】
図11に示す画像200Bは、同一時刻で複数の単体魚を検出し、これら複数の単体魚毎に反射強度TSと入射角θcとの関係を取得した場合に生成する画像である。画像200Bでは、入射角θcを横軸とし、反射強度TSを縦軸として、分散図が表示されている。図中の×印が、検出した入射角θcと反射強度TSの組の位置を示す。なお、この表示方法も一例であり、同一時刻で得られた複数の単体魚毎の反射強度TSと入射角θcとの関係が図示されていれば、他の態様でもよい。
【0093】
また、上述の説明では、反射強度をエコー信号の最大値から算出する例を示したが、具体的には、次に示す各方法で反射強度を算出すればよい。
【0094】
・検出した単体魚Fiのエコー信号の値を所定時間長積分した積分値から反射強度を算出する。
【0095】
・検出した単体魚Fiのエコー信号の周波数スペクトルを取得し、当該周波数スペクトルの最大値から反射強度を算出する。
【0096】
・検出した単体魚Fiのエコー信号の周波数スペクトルを取得し、当該周波数スペクトルの平均値から反射強度を算出する。
【0097】
また、上述の説明では、単体魚を対象として検出する例を示したが、他の水中移動体に対して、上述の構成および処理を適用することができる。
【符号の説明】
【0098】
1:水中探知装置、10:送受波器、11:送信信号生成部、121,122,123,124:送受切替器、13:受信信号生成部、14:演算処理部、141:単体魚検出部、142:姿勢角検出部、143:魚種判別部、144:表示制御部、15:記憶部、20:表示器、200,200A,200B:画像
【特許請求の範囲】
【請求項1】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信部と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する検出部と、
複数組の前記入射角と前記反射強度との関係を表示する表示部と、
を備えた水中探知装置。
【請求項2】
請求項1に記載の水中探知装置であって、
前記検出部は、複数の時刻において、前記入射角と前記反射強度との関係を取得し、
前記表示部は、前記複数の時刻に取得した前記入射角と前記反射強度との関係を、同時に表示する、水中探知装置。
【請求項3】
請求項1に記載の水中探知装置であって、
前記検出部は、同一時刻において、前記入射角と前記反射強度との関係を複数取得し、
前記表示部は、前記同一時刻に取得した前記入射角と前記反射強度との関係を、複数組、同時に表示する、水中探知装置。
【請求項4】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信部と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する検出部と、
複数組の前記入射角と前記反射強度との関係から、前記水中移動体の種類を判別する判別部と、
を備えた水中探知装置。
【請求項5】
請求項4に記載の水中探知装置であって、
前記検出部は、
前記エコー信号の強度から前記水中移動体の存在を検出する水中移動体検出部と、
検出された水中移動体の複数タイミングでの位置から前記入射角を検出する入射角検出部と、
検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、前記入射角と前記反射強度との組を生成する、判別情報生成部と、を備え、
前記判別部は、複数の反射強度の入射角軸上での分布から前記水中移動体の種類を判別する、水中探知装置。
【請求項6】
請求項5に記載の水中探知装置であって、
前記判別部は、
前記入射角軸を、一定の入射角幅からなる複数の入射角ビンに分割し、
前記入射角ビン毎の代表値から、反射強度の分布特性を取得し、該分布特性から前記水中移動体の種類を判別する、水中探知装置。
【請求項7】
請求項6に記載の水中探知装置であって、
前記判別部は、
前記水中移動体の種類毎に分布特性のテンプレートを予め記憶しており、
前記取得した分布特性と、前記水中移動体の種類毎のテンプレートの分布特性との関係から、前記水中移動体の種類を判別する、水中探知装置。
【請求項8】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の最大値である、水中探知装置。
【請求項9】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の平均値である、水中探知装置。
【請求項10】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の中心値である、水中探知装置。
【請求項11】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の中央値である、水中探知装置。
【請求項12】
請求項5乃至請求項11のいずれかに記載の水中探知装置であって、
前記分布および前記取得した分布特性から画像データを生成する表示制御部を備え、
前記表示部は、前記表示制御部で生成された画像データを表示する、水中探知装置。
【請求項13】
請求項1乃至請求項12のいずれかに記載の水中探知装置であって、
前記水中移動体は、単体魚である、水中探知装置。
【請求項14】
請求項1乃至請求項13のいずれかに記載の水中探知装置であって、
前記入射角は、前記水中移動体の進行方向の法線方向を基準とした角度である、水中探知装置。
【請求項15】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信工程と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する検出工程と、
複数組の前記入射角と前記反射強度との関係を表示する表示工程と、
を有する水中探知方法。
【請求項16】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信工程と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する検出工程と、
複数組の前記入射角と前記反射強度との関係から、前記水中移動体の種類を判別する判別工程と、
を有する水中探知方法。
【請求項17】
請求項16に記載の水中探知方法であって、
前記検出工程には、
前記エコー信号の強度から前記水中移動体の存在を検出する水中移動体検出工程と、
検出された水中移動体の複数タイミングでの位置から前記入射角を検出する入射角検出工程と、
検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、前記入射角と前記反射強度との組を生成する、判別情報生成工程と、を有し、
前記判別工程では、複数の反射強度の入射角軸上での分布から前記水中移動体の種類を判別する、水中探知方法。
【請求項18】
請求項17に記載の水中探知方法であって、
前記判別工程では、
前記入射角軸を、一定の入射角幅からなる複数の入射角ビンに分割し、
前記入射角ビン毎の代表値から、反射強度の分布特性を取得し、該分布特性から前記水中移動体の種類を判別する、水中探知方法。
【請求項19】
請求項15乃至請求項18のいずれかに記載の水中探知方法であって、
前記水中移動体は、単体魚である、水中探知方法。
【請求項20】
請求項15乃至請求項19のいずれかに記載の水中探知方法であって、
前記入射角は、前記水中移動体の進行方向の法線方向を基準とした角度である、水中探知方法。
【請求項21】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信処理と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する検出処理と、
複数組の前記入射角と前記反射強度との関係を表示する表示処理と、をコンピュータに実行させるための水中探知プログラム。
【請求項22】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信処理と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する検出処理と、
複数組の前記入射角と前記反射強度との関係から、前記水中移動体の種類を判別する判別処理と、をコンピュータに実行させるための水中探知プログラム。
【請求項23】
請求項22に記載の水中探知プログラムであって、
前記検出処理には、
前記エコー信号の強度から前記水中移動体の存在を検出する水中移動体検出処理と、
検出された水中移動体の複数タイミングでの位置から前記入射角を検出する入射角検出処理と、
検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、前記入射角と前記反射強度との組を生成する、判別情報生成処理と、が含まれ、
前記判別処理では、複数の反射強度の入射角軸上での分布から前記水中移動体の種類を判別する、水中探知プログラム。
【請求項24】
請求項23に記載の水中探知プログラムであって、
前記判別処理では、
前記入射角軸を、一定の入射角幅からなる複数の入射角ビンに分割し、
前記入射角ビン毎の代表値から、反射強度の分布特性を取得し、該分布特性から前記水中移動体の種類を判別する、水中探知プログラム。
【請求項25】
請求項21乃至請求項24のいずれかに記載の水中探知プログラムであって、
前記水中移動体は、単体魚である、水中探知プログラム。
【請求項26】
請求項21乃至請求項25のいずれかに記載の水中探知プログラムであって、
前記入射角は、前記水中移動体の進行方向の法線方向を基準とした角度である、水中探知プログラム。
【請求項1】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信部と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する検出部と、
複数組の前記入射角と前記反射強度との関係を表示する表示部と、
を備えた水中探知装置。
【請求項2】
請求項1に記載の水中探知装置であって、
前記検出部は、複数の時刻において、前記入射角と前記反射強度との関係を取得し、
前記表示部は、前記複数の時刻に取得した前記入射角と前記反射強度との関係を、同時に表示する、水中探知装置。
【請求項3】
請求項1に記載の水中探知装置であって、
前記検出部は、同一時刻において、前記入射角と前記反射強度との関係を複数取得し、
前記表示部は、前記同一時刻に取得した前記入射角と前記反射強度との関係を、複数組、同時に表示する、水中探知装置。
【請求項4】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信部と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する検出部と、
複数組の前記入射角と前記反射強度との関係から、前記水中移動体の種類を判別する判別部と、
を備えた水中探知装置。
【請求項5】
請求項4に記載の水中探知装置であって、
前記検出部は、
前記エコー信号の強度から前記水中移動体の存在を検出する水中移動体検出部と、
検出された水中移動体の複数タイミングでの位置から前記入射角を検出する入射角検出部と、
検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、前記入射角と前記反射強度との組を生成する、判別情報生成部と、を備え、
前記判別部は、複数の反射強度の入射角軸上での分布から前記水中移動体の種類を判別する、水中探知装置。
【請求項6】
請求項5に記載の水中探知装置であって、
前記判別部は、
前記入射角軸を、一定の入射角幅からなる複数の入射角ビンに分割し、
前記入射角ビン毎の代表値から、反射強度の分布特性を取得し、該分布特性から前記水中移動体の種類を判別する、水中探知装置。
【請求項7】
請求項6に記載の水中探知装置であって、
前記判別部は、
前記水中移動体の種類毎に分布特性のテンプレートを予め記憶しており、
前記取得した分布特性と、前記水中移動体の種類毎のテンプレートの分布特性との関係から、前記水中移動体の種類を判別する、水中探知装置。
【請求項8】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の最大値である、水中探知装置。
【請求項9】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の平均値である、水中探知装置。
【請求項10】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の中心値である、水中探知装置。
【請求項11】
請求項6または請求項7に記載の水中探知装置であって、
前記代表値は、前記入射角ビン内に含まれる複数の反射強度の中央値である、水中探知装置。
【請求項12】
請求項5乃至請求項11のいずれかに記載の水中探知装置であって、
前記分布および前記取得した分布特性から画像データを生成する表示制御部を備え、
前記表示部は、前記表示制御部で生成された画像データを表示する、水中探知装置。
【請求項13】
請求項1乃至請求項12のいずれかに記載の水中探知装置であって、
前記水中移動体は、単体魚である、水中探知装置。
【請求項14】
請求項1乃至請求項13のいずれかに記載の水中探知装置であって、
前記入射角は、前記水中移動体の進行方向の法線方向を基準とした角度である、水中探知装置。
【請求項15】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信工程と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する検出工程と、
複数組の前記入射角と前記反射強度との関係を表示する表示工程と、
を有する水中探知方法。
【請求項16】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信工程と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する検出工程と、
複数組の前記入射角と前記反射強度との関係から、前記水中移動体の種類を判別する判別工程と、
を有する水中探知方法。
【請求項17】
請求項16に記載の水中探知方法であって、
前記検出工程には、
前記エコー信号の強度から前記水中移動体の存在を検出する水中移動体検出工程と、
検出された水中移動体の複数タイミングでの位置から前記入射角を検出する入射角検出工程と、
検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、前記入射角と前記反射強度との組を生成する、判別情報生成工程と、を有し、
前記判別工程では、複数の反射強度の入射角軸上での分布から前記水中移動体の種類を判別する、水中探知方法。
【請求項18】
請求項17に記載の水中探知方法であって、
前記判別工程では、
前記入射角軸を、一定の入射角幅からなる複数の入射角ビンに分割し、
前記入射角ビン毎の代表値から、反射強度の分布特性を取得し、該分布特性から前記水中移動体の種類を判別する、水中探知方法。
【請求項19】
請求項15乃至請求項18のいずれかに記載の水中探知方法であって、
前記水中移動体は、単体魚である、水中探知方法。
【請求項20】
請求項15乃至請求項19のいずれかに記載の水中探知方法であって、
前記入射角は、前記水中移動体の進行方向の法線方向を基準とした角度である、水中探知方法。
【請求項21】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信処理と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と該水中移動体からの反射によるエコー信号の反射強度を検出する検出処理と、
複数組の前記入射角と前記反射強度との関係を表示する表示処理と、をコンピュータに実行させるための水中探知プログラム。
【請求項22】
水中へ超音波信号を送信し、該超音波信号による水中からのエコー信号を受信する送受信処理と、
前記エコー信号に基づいて、水中移動体に対する前記超音波信号の入射角と、該水中移動体からの反射によるエコー信号の反射強度を検出する検出処理と、
複数組の前記入射角と前記反射強度との関係から、前記水中移動体の種類を判別する判別処理と、をコンピュータに実行させるための水中探知プログラム。
【請求項23】
請求項22に記載の水中探知プログラムであって、
前記検出処理には、
前記エコー信号の強度から前記水中移動体の存在を検出する水中移動体検出処理と、
検出された水中移動体の複数タイミングでの位置から前記入射角を検出する入射角検出処理と、
検出された水中移動体の反射強度を算出して、該検出された水中移動体の入射角に関連付けすることで、前記入射角と前記反射強度との組を生成する、判別情報生成処理と、が含まれ、
前記判別処理では、複数の反射強度の入射角軸上での分布から前記水中移動体の種類を判別する、水中探知プログラム。
【請求項24】
請求項23に記載の水中探知プログラムであって、
前記判別処理では、
前記入射角軸を、一定の入射角幅からなる複数の入射角ビンに分割し、
前記入射角ビン毎の代表値から、反射強度の分布特性を取得し、該分布特性から前記水中移動体の種類を判別する、水中探知プログラム。
【請求項25】
請求項21乃至請求項24のいずれかに記載の水中探知プログラムであって、
前記水中移動体は、単体魚である、水中探知プログラム。
【請求項26】
請求項21乃至請求項25のいずれかに記載の水中探知プログラムであって、
前記入射角は、前記水中移動体の進行方向の法線方向を基準とした角度である、水中探知プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−7580(P2013−7580A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−138712(P2011−138712)
【出願日】平成23年6月22日(2011.6.22)
【出願人】(000166247)古野電気株式会社 (441)
【出願人】(709002004)学校法人東北学院 (10)
【出願人】(501168814)独立行政法人水産総合研究センター (103)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月22日(2011.6.22)
【出願人】(000166247)古野電気株式会社 (441)
【出願人】(709002004)学校法人東北学院 (10)
【出願人】(501168814)独立行政法人水産総合研究センター (103)
【Fターム(参考)】
[ Back to top ]