
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、水中航走体に関するものである。
【背景技術】
【0002】
従来、水中を航行する水中航走体において現在位置の認識は必須であり、このため水中航走体には自己の位置や方位を特定するための測位装置が搭載されている。測位装置として、慣性航法装置が知られている。慣性航法装置は、ジャイロと加速度計とを用いて3方向のそれぞれの加速度を測定し、その加速度を2回積分することにより現在位置を特定する。また、積分による誤差を低減するために、慣性航法装置と対地速度計を組み合わせて現在位置を特定する方法がある。
【0003】
しかしながら、慣性航法装置は、時間とともに位置誤差が累積するという欠点を有する。このため、正確な現在位置を保持するためには定期的に海面に浮上してGPS測位を行うことなどが必要となり、航行効率を低減させていた。
そこで、例えば、特開2007−292729号公報には、水中航走体に、海底面の各位置の水深を示す水深データベースを搭載し、水中航走体が航行中に取得した計測海底地形データと予め搭載されている水深データベースとをマッチングすることにより、現在位置を特定する技術が開示されている。
【特許文献1】特開2007−292729号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の発明では、水深データベースが用意されている領域については精度の高い現在位置検出が可能となる反面、水深データベースが用意されていない、つまり、水深データベースが存在していない領域については、慣性航法装置等による位置検出に頼らざるを得ず、時間とともに位置誤差が累積するという欠点を解消することができなかった。
【0005】
本発明は、上記問題を解決するためになされたもので、水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させることのできる水中航走体を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、測深手段と、所定の領域において、位置情報と水深とが対応付けられた水深データベースと、前記水深データベースが存在する領域において、該測深手段の計測値に基づいて作成された計測海底地形データと前記水深データベースとを照合することにより、現在位置を特定する第1位置特定手段と、慣性航法装置と、対地速度計と、少なくとも前記水深データベースが存在しない領域において、前記慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定する第2位置特定手段と、前記第2位置特定手段によって特定される現在位置を用いて航跡を生成する航跡生成手段と、前記水深データベースを有しない領域から前記水深データベースを有する領域に進入した場合に、前記第1位置特定手段によって検出された現在位置に基づいて、前記第2位置特定手段によって特定される現在位置及び前記航跡生成手段によって生成された航跡を補正する航跡補正手段とを具備する水中航走体を提供する。
【0007】
このような構成によれば、水深データベースが存在しない領域においては、慣性航法装置及び対地速度計の計測値に基づいて位置検出及び航跡の作成を行い、水深データベースが存在する領域に進入した場合には、その領域においてマッチングにより検出された精度の高い位置情報に基づいて、慣性航法装置及び対地速度計の計測値に基づいて検出された位置情報及び航跡生成手段によって生成された航跡を補正する。このようにすることで、結果的には、水深データベースが存在しない領域においても事後の補正処理により精度の高い航跡特定を行うことが可能となり、航行中に計測した計測海底地形データを高い精度の位置情報と対応付けすることが可能となる。また、このようにして取得した計測海底地形データを次回の探索時においては、水深データベースとして用いることで、水深データベースを充実させることが可能となる。
【0008】
上記水中航走体において、前記航跡補正手段は、例えば、前記第1位置特定手段によって検出された現在位置と前記第2位置特定手段によって特定された現在位置とを同定することにより、前記慣性航法装置が備えるジャイロの方位誤差、対地速度計のスケールファクタ誤差、及び対地速度計のバイアス誤差をそれぞれ算出し、このセンサ誤差に基づいて前記航跡を補正することとしてもよい。
【0009】
上記水中航走体において、前記測深手段によって検出される水深に基づいて、海底高度が一定となるように航行することとしてもよい。
【0010】
このように、海底面からの距離が一定となるように高度制御を行いながら航行を行うことで、測深手段から照射される超音波ビームの海底における照明領域幅を常に一定に保つことが可能となる。これにより、測深手段によって取得される水深データの水平分解能を安定させることができ、同じ品質の計測海底地形データを作成することが可能となる。
【0011】
上記水中航走体において、複数の水中航走体が編隊を組んで航行する場合に、隣接する他の水中航走体との水平方向における距離が一定となるように、航行を行うこととしてもよい。
【0012】
このようにすることで、隣接する水中航走体との照明領域の重なり幅を一定に保ちながら航行することが可能となる。この結果、水深データの取りこぼしをなくすことができ、効率的に水深データを取得することが可能となる。
【0013】
本発明は、複数の水中航走体が編隊を組んで航行する場合において、前記水中航走体の各々は海底高度が一定となるように航行を行うとともに、隣接する他の水中航走体との水平方向における距離が一定となるように航行を行う水中航走体の編隊航行方法を提供する。
【0014】
このようにすることで、隣接する水中航走体との照明領域の重なり幅を一定に保ちながら航行することが可能となる。この結果、水深データの取りこぼしをなくすことができ、効率的に水深データを取得することが可能となる。
【発明の効果】
【0015】
本発明によれば、水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させることができるという効果を奏する。
【発明を実施するための最良の形態】
【0016】
以下に、本発明に係る水中航走体の各実施形態について、図面を参照して説明する。
〔第1の実施形態〕
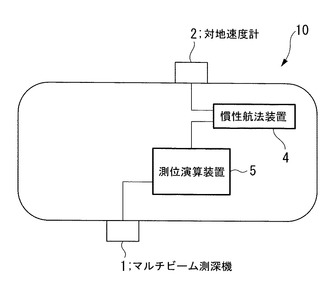
図1は、本発明の第1の実施形態に係る水中航走体の概略構成を示したブロック図である。図1に示すように、本実施形態に係る水中航走体10は、マルチビーム測深機1と、対地速度計2と、方位センサ3と、慣性航法装置4と、測位演算装置5とを備えている。
【0017】
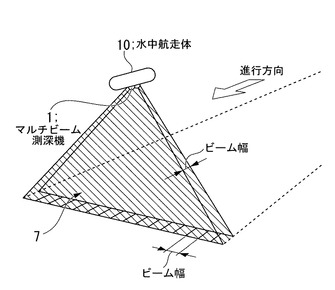
マルチビーム測深機1は、超音波ビームによって海底地形を計測するために使用される。図2は、マルチビーム測深機1の機能を示す図である。マルチビーム測深機1は、超音波ビーム7を水中航走体10の進行方向と垂直な方向に広がる扇状に発射する。発射された超音波ビーム7は、海底面によって反射され、マルチビーム測深機1に反射波が戻る。マルチビーム測深機1は、左右方向に多数の受波ビームを形成して超音波ビーム7が発射されてから海底面で反射されて戻るまでの時間tを計測し、その時間tから、水中航走体10を基準とする海底面の各位置の深度を決定する。水中航走体10を基準として計測された深度(以下「計測深度」という。)Dは、以下の(1)式によって求められる。
【0018】
D=(t/2)×c×cosθ・・・(1)
【0019】
ここでcは、海中での超音波ビームの伝播速度であり、θは、各受波ビームの鉛直方向に対する角度である。マルチビーム測深機1は、海底面の各位置の(水中航走体10を基準とする)計測深度を測位演算装置5に送信する。水中航走体10を基準とする計測深度Dに水中航走体10の深度を加算すれば、海面を基準とする水深が求められる。
【0020】
対地速度計2は、水中航走体10の対地速度を計測し、計測した速度を示す速度データを慣性航法装置4に送信する。
【0021】
慣性航法装置4は、慣性航法装置4に備わるジャイロと加速度計の計測データと、対地速度計2から受信する水中航走体10の対地速度データを元に、水中航走体10の位置を慣性航法によって特定する。慣性航法装置4は、特定した位置を示す慣性航法位置および姿勢データを測位演算装置5に送信する。
【0022】
測位演算装置5は、水中航走体10の位置及び方位を特定するための演算を行う。
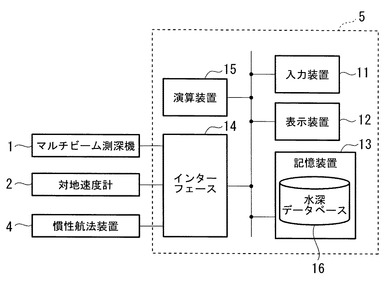
図3は、測位演算装置5の構成を示すブロック図である。測位演算装置5は、入力装置11と、表示装置12と、記憶装置13と、インターフェース14と、演算装置15とを備えている。入力装置11と表示装置12とは、オペレータが測位演算装置5を設定するためのヒューマンインターフェースとして使用される。入力装置11としては、例えばキーボードやマウス等が使用され、表示装置12としては、例えば、CRT(cathode ray tube)やLCD(liquid crystal display)が使用される。
【0023】
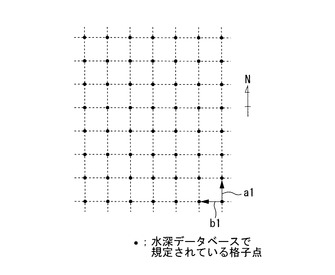
記憶装置13は、予め計測された海底面の各位置の水深を示す水深データを格納する水深データベース16を備えている。図4に示されているように、水深データベース16は、海底面に規定された2次元格子の各格子点における水深を示す水深データで構成される。
【0024】
インターフェース14は、マルチビーム測深機1及び慣性航法装置4と通信するために使用される。測位演算装置5は、インターフェース14を介して、マルチビーム測深機1によって計測された計測深度及び慣性航法装置4によって得られた慣性航法位置および姿勢データを受け取る。
【0025】
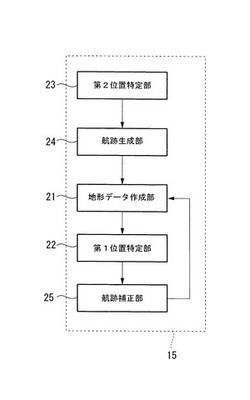
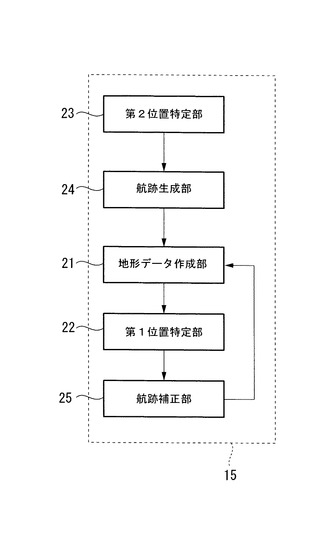
演算装置15は、図5に示すように、地形データ作成部21と、第1位置特定部22と、第2位置特定部23と、航跡生成部24と、航跡補正部25とを備えている。
第2位置特定部23は、水深データベース16が存在する領域、存在しない領域のどちらにおいても、慣性航法装置4の計測値に基づいて現在位置を特定する。
航跡生成部24は、第2位置特定部23によって特定された時々刻々の位置情報から航跡を生成する。
地形データ生成部21は、マルチビーム測深機1によって計測された海底面の計測深度と航跡生成部24により生成された航跡データから、計測海底地形データを生成する。
第1位置特定部22は、水深データベース16が存在する領域に進入した場合に、作成した計測海底地形データと水深データベース16とを照合することにより現在位置を特定する。具体的には、第1位置特定部22は、特許文献1に開示された方法を採用することにより、水深データベース16に基づいて現在位置を特定する。
【0026】
航跡補正部25は、水中航走体10が水深データベース16を有しない領域から水深データベース16を有する領域に進入した場合に、第1位置特定部22によって検出された現在位置に基づいて、第2位置特定部23によって特定される現在位置及び航跡生成部24によって生成された航跡を補正する。
航跡補正部25により補正された航跡に基づいて、地形データ生成部は計測海底地形データの位置補正を行い、補正された海底地形データを記憶装置へ出力する。このデータは、次回から、水深データベース16として利用することが可能である。
【0027】
上記構成を備える水中航走体10の航行中における現在位置検出について図6及び図7を参照して説明する。図6及び図7は、本実施形態における水中航走体10の位置及び方位を特定する手順を示すフローチャートである。
まず、海底探索を行う範囲(以下「海底探索領域」という。)および航行経路が入力装置11(図3参照)を介して作業員によって設定されると、この情報が水中航走体10の演算装置15に入力される(図6のステップSA1)。演算装置15は、海底探索領域を水深データベース16を有する領域と水深データベース16を有していない領域とに区分する(ステップSA2)。例えば、水深データベース16における水深データは緯度・経度からなる位置情報と対応付けられているので、この位置情報と海底探索領域内の各所の位置情報とを比較することにより、海底探索領域の領域区分を行う。
【0028】
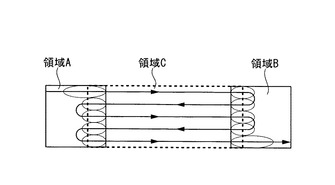
以下の説明では、図8に示すように、海底探索領域のうち、領域Aと領域Bが水深データベース16の存在する領域、領域Cが水深データベース16の存在しない領域として区分され、また、矢印で示すような航行経路が設定された場合を想定して説明する。
【0029】
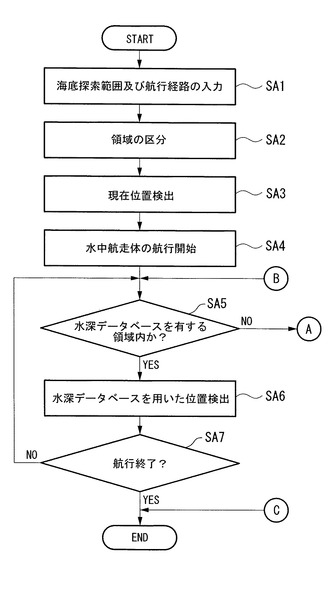
上記海底探索領域の領域区分が終わると、水中航走体10の現在位置の検出が慣性航法装置4及び対地速度計の計測値に基づいて行われた後(ステップSA3)、水中航走体10の航行及びマルチビーム測深機1による水深データの取得が開始される(ステップSA4)。
続いて、現在位置が水深データベース16を有する領域内であるか否かが判定され(ステップSA5)、この結果、水深データベース16を有する領域であれば、水深データベース16を用いた位置検出が第1位置特定部22により行われ(ステップSA6)、水深データベースを有しない領域であれば、慣性航法装置4及び対地速度計2に基づく位置検出が第2位置特定部23により行われる(図7のステップSA8)。
本実施形態では、図8に示されるように、探索開始地点は、領域A内に設定されているので、ステップSA5において「YES」と判断され、ステップSA6において、水深データベース16を用いた位置検出が第1位置特定部22により行われることとなる。
【0030】
続いて、海底探索領域の全域について計測海底地形データが作成されたか、換言すると、海底探索領域に設定された全ての航行経路について航行が終了したかが判断され(ステップSA7)、この結果、航行が終了していれば、位置検出を終了するとともに、マルチビーム測深機1による深度計測が停止されて、計測海底地形データの作成が終了される。一方、航行が終了していなければ、ステップSA5に戻り、現在位置が水深データベース16を有する領域であるか否かが再び判定される。
【0031】
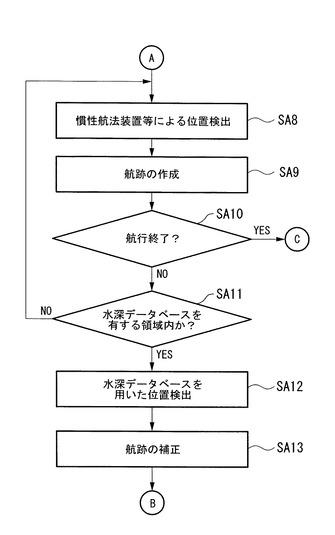
ここで、現在位置が未だに図8に示した領域A内であれば、図6のステップSA5において「YES」と判定され、ステップSA6において水深データベース16を用いた位置検出が行われる。一方、現在位置が領域Cであった場合には、図6のステップSA5において「NO」と判定され、図7のステップSA8に進み、慣性航法装置4及び対地速度計2に基づく位置検出が第2位置特定部23により行われ、更に、航跡生成部24により航跡が生成される(ステップSA9)。
【0032】
続いて、海底探索領域に設定された全ての航行経路について航行が終了したかが判断される(ステップSA10)。この結果、航行が終了していなければ、現在位置が水深データベース16を有する領域であるか否かが判定され(ステップSA11)、また、航行が終了していれば、位置検出を終了するとともに、マルチビーム測深機1による深度計測が停止され、計測海底地形データの作成が終了される。ここでは、まだ航行は終了していないと判断され、ステップSA11において、現在位置が水深データベース16を有する領域であるか否かが判定される。
【0033】
この結果、水中航走体が図8に示した領域C内を航行しており、このため、水深データベース16を有しない領域内であると判定された場合には、ステップSA8に戻り、第2位置特定部23による位置検出及び航跡生成部24による航跡の生成が行われる(ステップSA8,SA9)。
【0034】
一方、ステップSA11において、水中航走体10が領域Cから領域Bに進入しており、現在位置が水深データベース16を有する領域内であると判定された場合には、水深データベース16と計測海底地形データとを用いた位置検出が第1位置特定部22により行われ(ステップSA12)、この現在位置と慣性航法装置4の計測値に基づいて特定された現在位置とが同定されることにより、航跡生成部24によって生成された領域Cにおける航跡の補正が行われる(ステップSA13)。
以下、航跡補正部25によって行われる補正について図9を参照して説明する。
【0035】
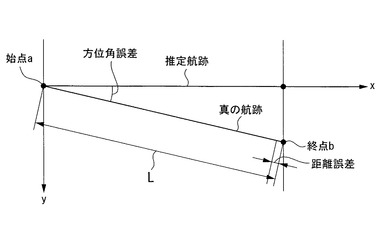
図9に示すように、航跡生成部24によって生成された航路を推定航路とし、領域Aにおいて取得した位置情報(図中始点a)と領域Bにおいて取得した位置情報(図中終点b)とを直線で結んだ航跡を水中航走体10が航行した真の航路とした場合、慣性航法装置4の方位角誤差Δφ、対地速度計2のスケールファクタ誤差ΔSF、対地速度計2のバイアス誤差ΔBは、以下の表で表わされる。
【0036】
【表1】

【0037】
L:航行距離、t:航行時間、速度vで等速運動とすると、Δx=LΔSF+tΔB=L(ΔSF+ΔB/v)
【0038】
航跡補正部25は、上述の式に基づいて、水深データベース16を用いて検出した現在位置bと慣性航法装置4の計測値に基づいて特定された現在位置b´とを同定することにより、センサ誤差Δφ、ΔSF+ΔB/vを同定し、更に、始点aから終点b´までの位置情報を誤差分だけ補正することにより、航跡生成部24によって生成された領域Cにおける航跡を補正する。
【0039】
上記航跡補正部24による領域Cにおける航跡の補正が終了すると、地形データ作成部21は、作成した計測海底地形データの位置情報を補正後の航跡情報に基づいて補正し、補正後の計測海底地形データを記憶装置13(図3参照)の所定の格納場所に格納する。
【0040】
このようにして、航跡補正等が行われると、図6のステップSA5に戻り、現在位置が水深データベース16を有する領域であるか否かが判定される。
そして、上述した処理が航行終了まで繰り返し行われることにより、領域A及び領域Bにおいては、水深データベース16を用いた位置検出が行われ、領域Cにおいては慣性航法装置4及び対地速度計2の計測値に基づく位置検出が行われる。また、領域Cから領域Bに進入したとき、及び、領域Cから領域Aに進入したときには、水深データベース16を用いて検出された現在位置と、慣性航法装置4の計測値に基づいて検出された現在位置とを同定することで、センサ誤差を算出し、更に、航跡を補正する。
【0041】
以上説明してきたように、本実施形態に係る水中航走体10によれば、水深データベース16が存在しない領域においては、慣性航法装置4の計測値に基づいて位置検出及び航跡の作成を行い、水深データベース16が存在する領域に進入した場合には、その領域において検出された精度のより高い位置情報に基づいて、慣性航法装置4の計測値から求められた位置情報を同定することで、センサの誤差を求める。そして、このセンサ誤差を慣性航法装置4の計測値から作成された航跡に反映させることで、航跡の精度を向上させる。このようにすることで、結果的には、水深データベース16が存在しない領域においても精度の高い位置検出を行うことが可能となり、海底探索や計測海底地形データの精度を向上させることが可能となる。また、このようにして取得した計測海底地形データを次回の探索時においては、水深データベース16として用いることで、水深データベース16を充実させることが可能となる。
【0042】
〔第2の実施形態〕
次に、本発明の第2の実施形態について、図面を用いて説明する。
本実施形態に係る水中航走体10は、上述した第1の実施形態に係る水中航走体10において、マルチビーム測深機1によって計測される水深データに基づき、海底高度が一定となるように航行する制御を行うものである。
【0043】
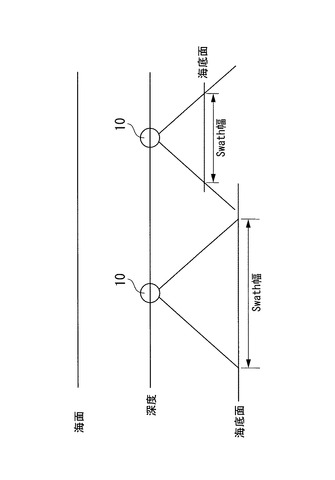
図10は、水中航走体10を水中航走体の進行方向からみた図である。例えば、図10に示すように、深度を常に一定として航行していた場合、海底地形の起伏に応じて超音波ビームの海底における照明領域幅(Swath幅)が異なることとなる。例えば、水中航走体10が同じ深度で航行していた場合、海底までの距離が近いほど、超音波ビームの海底における照明領域幅が小さくなる。
【0044】
そこで、本実施形態では、海底面からの距離が一定となるように高度制御を行いながら航行を行うことで、超音波ビームの海底における照明領域幅を常に一定に保つこととする。これにより、マルチビーム測探機1によって取得される水深データの水平分解能を安定させることができ、同じ品質の計測海底地形データを作成することが可能となる。
【0045】
〔第3の実施形態〕
次に、本発明の第3の実施形態について、図面を用いて説明する。
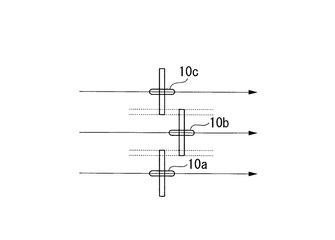
上記第2の実施形態では、1台の水中航走体10を対象としていたが、本実施形態においては、図11に示すように、複数台の水中航走体10a,10b,10cが編隊を組んで航行する場合を想定している。例えば、図8に示したような海底探索領域が設定され、一台の水中航走体10であれば、往復を繰り返しながら全領域における水深データを取得しなければならない場合に、図11に示すように複数の水中航走体10a,10b,10cを進行方向に対して交わる方向、より好ましくは、進行方向に対して直交する方向に配列させ、編隊を組みながら航行させることで効率的に水深データを取得することが可能となる。
【0046】
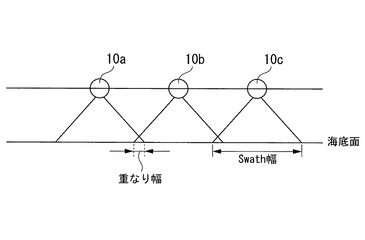
このような場合に、各水中航走体10は上述した第2の実施形態のように、海底からの距離が一定となるように自己の水深を制御しながら航行するとともに、且つ、隣接する水中航走体との距離が一定となるように航行を行う。このようにすることで、図12に示すように、隣接する水中航走体との照明領域の重なり幅をそれぞれ一定に保ちながら航行することが可能となる。この結果、水深データの取りこぼしをなくすことができるとともに、効率的に水深データを取得することが可能となる。
なお、複数の水中航走体で編隊を組んで航行する場合には、各水中航走体10a,10b,10cが備えるマルチビーム測深機1から出力する超音波ビームの周波数を互いに異ならせる。または、進行方向に距離差を設けて編隊航走する。これにより、超音波ビームの相互干渉を回避することができる。
【図面の簡単な説明】
【0047】
【図1】本発明の第1の実施形態に係る水中航走体の構成を示したブロック図である。
【図2】図1に示したマルチビーム測深機の機能を説明する概念図である。
【図3】図1に示した測位演算装置の構成を示したブロック図である。
【図4】水深データベースの内容を説明する概念図である。
【図5】図3に示した演算装置の構成を示したブロック図である。
【図6】本発明の第1の実施形態に係る水中航走体の位置検出に係る処理手順を示したフローチャートである。
【図7】本発明の第1の実施形態に係る水中航走体の位置検出に係る処理手順を示したフローチャートである。
【図8】海底探索領域及び航行経路並びに領域区分について説明するための図である。
【図9】航跡補正部において行われる補正処理について説明するための概念図である。
【図10】本発明の第2の実施形態に係る水中航走体の深度航行制御について説明するための概念図である。
【図11】本発明の第3の実施形態に係る水中航走体の水平航行制御について説明するための概念図である。
【図12】本発明の第3の実施形態に係る水中航走体の水平航行制御について説明するための概念図である。
【符号の説明】
【0048】
1 マルチビーム測深機
2 対地速度計
4 慣性航法装置
5 測位演算装置
11 入力装置
12 表示装置
13 記憶装置
14 インターフェース
15 演算装置
16 水深データベース
21 地形データ作成部
22 第1位置特定部
23 第2位置特定部
24 航跡生成部
25 航跡補正部
【技術分野】
【0001】
本発明は、水中航走体に関するものである。
【背景技術】
【0002】
従来、水中を航行する水中航走体において現在位置の認識は必須であり、このため水中航走体には自己の位置や方位を特定するための測位装置が搭載されている。測位装置として、慣性航法装置が知られている。慣性航法装置は、ジャイロと加速度計とを用いて3方向のそれぞれの加速度を測定し、その加速度を2回積分することにより現在位置を特定する。また、積分による誤差を低減するために、慣性航法装置と対地速度計を組み合わせて現在位置を特定する方法がある。
【0003】
しかしながら、慣性航法装置は、時間とともに位置誤差が累積するという欠点を有する。このため、正確な現在位置を保持するためには定期的に海面に浮上してGPS測位を行うことなどが必要となり、航行効率を低減させていた。
そこで、例えば、特開2007−292729号公報には、水中航走体に、海底面の各位置の水深を示す水深データベースを搭載し、水中航走体が航行中に取得した計測海底地形データと予め搭載されている水深データベースとをマッチングすることにより、現在位置を特定する技術が開示されている。
【特許文献1】特開2007−292729号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の発明では、水深データベースが用意されている領域については精度の高い現在位置検出が可能となる反面、水深データベースが用意されていない、つまり、水深データベースが存在していない領域については、慣性航法装置等による位置検出に頼らざるを得ず、時間とともに位置誤差が累積するという欠点を解消することができなかった。
【0005】
本発明は、上記問題を解決するためになされたもので、水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させることのできる水中航走体を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、測深手段と、所定の領域において、位置情報と水深とが対応付けられた水深データベースと、前記水深データベースが存在する領域において、該測深手段の計測値に基づいて作成された計測海底地形データと前記水深データベースとを照合することにより、現在位置を特定する第1位置特定手段と、慣性航法装置と、対地速度計と、少なくとも前記水深データベースが存在しない領域において、前記慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定する第2位置特定手段と、前記第2位置特定手段によって特定される現在位置を用いて航跡を生成する航跡生成手段と、前記水深データベースを有しない領域から前記水深データベースを有する領域に進入した場合に、前記第1位置特定手段によって検出された現在位置に基づいて、前記第2位置特定手段によって特定される現在位置及び前記航跡生成手段によって生成された航跡を補正する航跡補正手段とを具備する水中航走体を提供する。
【0007】
このような構成によれば、水深データベースが存在しない領域においては、慣性航法装置及び対地速度計の計測値に基づいて位置検出及び航跡の作成を行い、水深データベースが存在する領域に進入した場合には、その領域においてマッチングにより検出された精度の高い位置情報に基づいて、慣性航法装置及び対地速度計の計測値に基づいて検出された位置情報及び航跡生成手段によって生成された航跡を補正する。このようにすることで、結果的には、水深データベースが存在しない領域においても事後の補正処理により精度の高い航跡特定を行うことが可能となり、航行中に計測した計測海底地形データを高い精度の位置情報と対応付けすることが可能となる。また、このようにして取得した計測海底地形データを次回の探索時においては、水深データベースとして用いることで、水深データベースを充実させることが可能となる。
【0008】
上記水中航走体において、前記航跡補正手段は、例えば、前記第1位置特定手段によって検出された現在位置と前記第2位置特定手段によって特定された現在位置とを同定することにより、前記慣性航法装置が備えるジャイロの方位誤差、対地速度計のスケールファクタ誤差、及び対地速度計のバイアス誤差をそれぞれ算出し、このセンサ誤差に基づいて前記航跡を補正することとしてもよい。
【0009】
上記水中航走体において、前記測深手段によって検出される水深に基づいて、海底高度が一定となるように航行することとしてもよい。
【0010】
このように、海底面からの距離が一定となるように高度制御を行いながら航行を行うことで、測深手段から照射される超音波ビームの海底における照明領域幅を常に一定に保つことが可能となる。これにより、測深手段によって取得される水深データの水平分解能を安定させることができ、同じ品質の計測海底地形データを作成することが可能となる。
【0011】
上記水中航走体において、複数の水中航走体が編隊を組んで航行する場合に、隣接する他の水中航走体との水平方向における距離が一定となるように、航行を行うこととしてもよい。
【0012】
このようにすることで、隣接する水中航走体との照明領域の重なり幅を一定に保ちながら航行することが可能となる。この結果、水深データの取りこぼしをなくすことができ、効率的に水深データを取得することが可能となる。
【0013】
本発明は、複数の水中航走体が編隊を組んで航行する場合において、前記水中航走体の各々は海底高度が一定となるように航行を行うとともに、隣接する他の水中航走体との水平方向における距離が一定となるように航行を行う水中航走体の編隊航行方法を提供する。
【0014】
このようにすることで、隣接する水中航走体との照明領域の重なり幅を一定に保ちながら航行することが可能となる。この結果、水深データの取りこぼしをなくすことができ、効率的に水深データを取得することが可能となる。
【発明の効果】
【0015】
本発明によれば、水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させることができるという効果を奏する。
【発明を実施するための最良の形態】
【0016】
以下に、本発明に係る水中航走体の各実施形態について、図面を参照して説明する。
〔第1の実施形態〕
図1は、本発明の第1の実施形態に係る水中航走体の概略構成を示したブロック図である。図1に示すように、本実施形態に係る水中航走体10は、マルチビーム測深機1と、対地速度計2と、方位センサ3と、慣性航法装置4と、測位演算装置5とを備えている。
【0017】
マルチビーム測深機1は、超音波ビームによって海底地形を計測するために使用される。図2は、マルチビーム測深機1の機能を示す図である。マルチビーム測深機1は、超音波ビーム7を水中航走体10の進行方向と垂直な方向に広がる扇状に発射する。発射された超音波ビーム7は、海底面によって反射され、マルチビーム測深機1に反射波が戻る。マルチビーム測深機1は、左右方向に多数の受波ビームを形成して超音波ビーム7が発射されてから海底面で反射されて戻るまでの時間tを計測し、その時間tから、水中航走体10を基準とする海底面の各位置の深度を決定する。水中航走体10を基準として計測された深度(以下「計測深度」という。)Dは、以下の(1)式によって求められる。
【0018】
D=(t/2)×c×cosθ・・・(1)
【0019】
ここでcは、海中での超音波ビームの伝播速度であり、θは、各受波ビームの鉛直方向に対する角度である。マルチビーム測深機1は、海底面の各位置の(水中航走体10を基準とする)計測深度を測位演算装置5に送信する。水中航走体10を基準とする計測深度Dに水中航走体10の深度を加算すれば、海面を基準とする水深が求められる。
【0020】
対地速度計2は、水中航走体10の対地速度を計測し、計測した速度を示す速度データを慣性航法装置4に送信する。
【0021】
慣性航法装置4は、慣性航法装置4に備わるジャイロと加速度計の計測データと、対地速度計2から受信する水中航走体10の対地速度データを元に、水中航走体10の位置を慣性航法によって特定する。慣性航法装置4は、特定した位置を示す慣性航法位置および姿勢データを測位演算装置5に送信する。
【0022】
測位演算装置5は、水中航走体10の位置及び方位を特定するための演算を行う。
図3は、測位演算装置5の構成を示すブロック図である。測位演算装置5は、入力装置11と、表示装置12と、記憶装置13と、インターフェース14と、演算装置15とを備えている。入力装置11と表示装置12とは、オペレータが測位演算装置5を設定するためのヒューマンインターフェースとして使用される。入力装置11としては、例えばキーボードやマウス等が使用され、表示装置12としては、例えば、CRT(cathode ray tube)やLCD(liquid crystal display)が使用される。
【0023】
記憶装置13は、予め計測された海底面の各位置の水深を示す水深データを格納する水深データベース16を備えている。図4に示されているように、水深データベース16は、海底面に規定された2次元格子の各格子点における水深を示す水深データで構成される。
【0024】
インターフェース14は、マルチビーム測深機1及び慣性航法装置4と通信するために使用される。測位演算装置5は、インターフェース14を介して、マルチビーム測深機1によって計測された計測深度及び慣性航法装置4によって得られた慣性航法位置および姿勢データを受け取る。
【0025】
演算装置15は、図5に示すように、地形データ作成部21と、第1位置特定部22と、第2位置特定部23と、航跡生成部24と、航跡補正部25とを備えている。
第2位置特定部23は、水深データベース16が存在する領域、存在しない領域のどちらにおいても、慣性航法装置4の計測値に基づいて現在位置を特定する。
航跡生成部24は、第2位置特定部23によって特定された時々刻々の位置情報から航跡を生成する。
地形データ生成部21は、マルチビーム測深機1によって計測された海底面の計測深度と航跡生成部24により生成された航跡データから、計測海底地形データを生成する。
第1位置特定部22は、水深データベース16が存在する領域に進入した場合に、作成した計測海底地形データと水深データベース16とを照合することにより現在位置を特定する。具体的には、第1位置特定部22は、特許文献1に開示された方法を採用することにより、水深データベース16に基づいて現在位置を特定する。
【0026】
航跡補正部25は、水中航走体10が水深データベース16を有しない領域から水深データベース16を有する領域に進入した場合に、第1位置特定部22によって検出された現在位置に基づいて、第2位置特定部23によって特定される現在位置及び航跡生成部24によって生成された航跡を補正する。
航跡補正部25により補正された航跡に基づいて、地形データ生成部は計測海底地形データの位置補正を行い、補正された海底地形データを記憶装置へ出力する。このデータは、次回から、水深データベース16として利用することが可能である。
【0027】
上記構成を備える水中航走体10の航行中における現在位置検出について図6及び図7を参照して説明する。図6及び図7は、本実施形態における水中航走体10の位置及び方位を特定する手順を示すフローチャートである。
まず、海底探索を行う範囲(以下「海底探索領域」という。)および航行経路が入力装置11(図3参照)を介して作業員によって設定されると、この情報が水中航走体10の演算装置15に入力される(図6のステップSA1)。演算装置15は、海底探索領域を水深データベース16を有する領域と水深データベース16を有していない領域とに区分する(ステップSA2)。例えば、水深データベース16における水深データは緯度・経度からなる位置情報と対応付けられているので、この位置情報と海底探索領域内の各所の位置情報とを比較することにより、海底探索領域の領域区分を行う。
【0028】
以下の説明では、図8に示すように、海底探索領域のうち、領域Aと領域Bが水深データベース16の存在する領域、領域Cが水深データベース16の存在しない領域として区分され、また、矢印で示すような航行経路が設定された場合を想定して説明する。
【0029】
上記海底探索領域の領域区分が終わると、水中航走体10の現在位置の検出が慣性航法装置4及び対地速度計の計測値に基づいて行われた後(ステップSA3)、水中航走体10の航行及びマルチビーム測深機1による水深データの取得が開始される(ステップSA4)。
続いて、現在位置が水深データベース16を有する領域内であるか否かが判定され(ステップSA5)、この結果、水深データベース16を有する領域であれば、水深データベース16を用いた位置検出が第1位置特定部22により行われ(ステップSA6)、水深データベースを有しない領域であれば、慣性航法装置4及び対地速度計2に基づく位置検出が第2位置特定部23により行われる(図7のステップSA8)。
本実施形態では、図8に示されるように、探索開始地点は、領域A内に設定されているので、ステップSA5において「YES」と判断され、ステップSA6において、水深データベース16を用いた位置検出が第1位置特定部22により行われることとなる。
【0030】
続いて、海底探索領域の全域について計測海底地形データが作成されたか、換言すると、海底探索領域に設定された全ての航行経路について航行が終了したかが判断され(ステップSA7)、この結果、航行が終了していれば、位置検出を終了するとともに、マルチビーム測深機1による深度計測が停止されて、計測海底地形データの作成が終了される。一方、航行が終了していなければ、ステップSA5に戻り、現在位置が水深データベース16を有する領域であるか否かが再び判定される。
【0031】
ここで、現在位置が未だに図8に示した領域A内であれば、図6のステップSA5において「YES」と判定され、ステップSA6において水深データベース16を用いた位置検出が行われる。一方、現在位置が領域Cであった場合には、図6のステップSA5において「NO」と判定され、図7のステップSA8に進み、慣性航法装置4及び対地速度計2に基づく位置検出が第2位置特定部23により行われ、更に、航跡生成部24により航跡が生成される(ステップSA9)。
【0032】
続いて、海底探索領域に設定された全ての航行経路について航行が終了したかが判断される(ステップSA10)。この結果、航行が終了していなければ、現在位置が水深データベース16を有する領域であるか否かが判定され(ステップSA11)、また、航行が終了していれば、位置検出を終了するとともに、マルチビーム測深機1による深度計測が停止され、計測海底地形データの作成が終了される。ここでは、まだ航行は終了していないと判断され、ステップSA11において、現在位置が水深データベース16を有する領域であるか否かが判定される。
【0033】
この結果、水中航走体が図8に示した領域C内を航行しており、このため、水深データベース16を有しない領域内であると判定された場合には、ステップSA8に戻り、第2位置特定部23による位置検出及び航跡生成部24による航跡の生成が行われる(ステップSA8,SA9)。
【0034】
一方、ステップSA11において、水中航走体10が領域Cから領域Bに進入しており、現在位置が水深データベース16を有する領域内であると判定された場合には、水深データベース16と計測海底地形データとを用いた位置検出が第1位置特定部22により行われ(ステップSA12)、この現在位置と慣性航法装置4の計測値に基づいて特定された現在位置とが同定されることにより、航跡生成部24によって生成された領域Cにおける航跡の補正が行われる(ステップSA13)。
以下、航跡補正部25によって行われる補正について図9を参照して説明する。
【0035】
図9に示すように、航跡生成部24によって生成された航路を推定航路とし、領域Aにおいて取得した位置情報(図中始点a)と領域Bにおいて取得した位置情報(図中終点b)とを直線で結んだ航跡を水中航走体10が航行した真の航路とした場合、慣性航法装置4の方位角誤差Δφ、対地速度計2のスケールファクタ誤差ΔSF、対地速度計2のバイアス誤差ΔBは、以下の表で表わされる。
【0036】
【表1】
【0037】
L:航行距離、t:航行時間、速度vで等速運動とすると、Δx=LΔSF+tΔB=L(ΔSF+ΔB/v)
【0038】
航跡補正部25は、上述の式に基づいて、水深データベース16を用いて検出した現在位置bと慣性航法装置4の計測値に基づいて特定された現在位置b´とを同定することにより、センサ誤差Δφ、ΔSF+ΔB/vを同定し、更に、始点aから終点b´までの位置情報を誤差分だけ補正することにより、航跡生成部24によって生成された領域Cにおける航跡を補正する。
【0039】
上記航跡補正部24による領域Cにおける航跡の補正が終了すると、地形データ作成部21は、作成した計測海底地形データの位置情報を補正後の航跡情報に基づいて補正し、補正後の計測海底地形データを記憶装置13(図3参照)の所定の格納場所に格納する。
【0040】
このようにして、航跡補正等が行われると、図6のステップSA5に戻り、現在位置が水深データベース16を有する領域であるか否かが判定される。
そして、上述した処理が航行終了まで繰り返し行われることにより、領域A及び領域Bにおいては、水深データベース16を用いた位置検出が行われ、領域Cにおいては慣性航法装置4及び対地速度計2の計測値に基づく位置検出が行われる。また、領域Cから領域Bに進入したとき、及び、領域Cから領域Aに進入したときには、水深データベース16を用いて検出された現在位置と、慣性航法装置4の計測値に基づいて検出された現在位置とを同定することで、センサ誤差を算出し、更に、航跡を補正する。
【0041】
以上説明してきたように、本実施形態に係る水中航走体10によれば、水深データベース16が存在しない領域においては、慣性航法装置4の計測値に基づいて位置検出及び航跡の作成を行い、水深データベース16が存在する領域に進入した場合には、その領域において検出された精度のより高い位置情報に基づいて、慣性航法装置4の計測値から求められた位置情報を同定することで、センサの誤差を求める。そして、このセンサ誤差を慣性航法装置4の計測値から作成された航跡に反映させることで、航跡の精度を向上させる。このようにすることで、結果的には、水深データベース16が存在しない領域においても精度の高い位置検出を行うことが可能となり、海底探索や計測海底地形データの精度を向上させることが可能となる。また、このようにして取得した計測海底地形データを次回の探索時においては、水深データベース16として用いることで、水深データベース16を充実させることが可能となる。
【0042】
〔第2の実施形態〕
次に、本発明の第2の実施形態について、図面を用いて説明する。
本実施形態に係る水中航走体10は、上述した第1の実施形態に係る水中航走体10において、マルチビーム測深機1によって計測される水深データに基づき、海底高度が一定となるように航行する制御を行うものである。
【0043】
図10は、水中航走体10を水中航走体の進行方向からみた図である。例えば、図10に示すように、深度を常に一定として航行していた場合、海底地形の起伏に応じて超音波ビームの海底における照明領域幅(Swath幅)が異なることとなる。例えば、水中航走体10が同じ深度で航行していた場合、海底までの距離が近いほど、超音波ビームの海底における照明領域幅が小さくなる。
【0044】
そこで、本実施形態では、海底面からの距離が一定となるように高度制御を行いながら航行を行うことで、超音波ビームの海底における照明領域幅を常に一定に保つこととする。これにより、マルチビーム測探機1によって取得される水深データの水平分解能を安定させることができ、同じ品質の計測海底地形データを作成することが可能となる。
【0045】
〔第3の実施形態〕
次に、本発明の第3の実施形態について、図面を用いて説明する。
上記第2の実施形態では、1台の水中航走体10を対象としていたが、本実施形態においては、図11に示すように、複数台の水中航走体10a,10b,10cが編隊を組んで航行する場合を想定している。例えば、図8に示したような海底探索領域が設定され、一台の水中航走体10であれば、往復を繰り返しながら全領域における水深データを取得しなければならない場合に、図11に示すように複数の水中航走体10a,10b,10cを進行方向に対して交わる方向、より好ましくは、進行方向に対して直交する方向に配列させ、編隊を組みながら航行させることで効率的に水深データを取得することが可能となる。
【0046】
このような場合に、各水中航走体10は上述した第2の実施形態のように、海底からの距離が一定となるように自己の水深を制御しながら航行するとともに、且つ、隣接する水中航走体との距離が一定となるように航行を行う。このようにすることで、図12に示すように、隣接する水中航走体との照明領域の重なり幅をそれぞれ一定に保ちながら航行することが可能となる。この結果、水深データの取りこぼしをなくすことができるとともに、効率的に水深データを取得することが可能となる。
なお、複数の水中航走体で編隊を組んで航行する場合には、各水中航走体10a,10b,10cが備えるマルチビーム測深機1から出力する超音波ビームの周波数を互いに異ならせる。または、進行方向に距離差を設けて編隊航走する。これにより、超音波ビームの相互干渉を回避することができる。
【図面の簡単な説明】
【0047】
【図1】本発明の第1の実施形態に係る水中航走体の構成を示したブロック図である。
【図2】図1に示したマルチビーム測深機の機能を説明する概念図である。
【図3】図1に示した測位演算装置の構成を示したブロック図である。
【図4】水深データベースの内容を説明する概念図である。
【図5】図3に示した演算装置の構成を示したブロック図である。
【図6】本発明の第1の実施形態に係る水中航走体の位置検出に係る処理手順を示したフローチャートである。
【図7】本発明の第1の実施形態に係る水中航走体の位置検出に係る処理手順を示したフローチャートである。
【図8】海底探索領域及び航行経路並びに領域区分について説明するための図である。
【図9】航跡補正部において行われる補正処理について説明するための概念図である。
【図10】本発明の第2の実施形態に係る水中航走体の深度航行制御について説明するための概念図である。
【図11】本発明の第3の実施形態に係る水中航走体の水平航行制御について説明するための概念図である。
【図12】本発明の第3の実施形態に係る水中航走体の水平航行制御について説明するための概念図である。
【符号の説明】
【0048】
1 マルチビーム測深機
2 対地速度計
4 慣性航法装置
5 測位演算装置
11 入力装置
12 表示装置
13 記憶装置
14 インターフェース
15 演算装置
16 水深データベース
21 地形データ作成部
22 第1位置特定部
23 第2位置特定部
24 航跡生成部
25 航跡補正部
【特許請求の範囲】
【請求項1】
測深手段と、
所定の領域において、位置情報と水深とが対応付けられた水深データベースと、
前記水深データベースが存在する領域において、該測深手段の計測値に基づいて作成された計測海底地形データと前記水深データベースとを照合することにより、現在位置を特定する第1位置特定手段と、
慣性航法装置と、
対地速度計と、
少なくとも前記水深データベースが存在しない領域において、前記慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定する第2位置特定手段と、
前記第2位置特定手段によって特定される現在位置を用いて航跡を生成する航跡生成手段と、
前記水深データベースを有しない領域から前記水深データベースを有する領域に進入した場合に、前記第1位置特定手段によって検出された現在位置に基づいて、前記第2位置特定手段によって特定される現在位置及び前記航跡生成手段によって生成された航跡を補正する航跡補正手段と
を具備する水中航走体。
【請求項2】
前記航跡補正手段は、前記第1位置特定手段によって検出された現在位置と前記第2位置特定手段によって特定された現在位置とを同定することにより、前記慣性航法装置が備えるジャイロの方位誤差、対地速度計のスケールファクタ誤差、及び対地速度計のバイアス誤差をそれぞれ算出し、このセンサ誤差に基づいて前記航跡を補正する請求項1に記載の水中航走体。
【請求項3】
前記測深手段によって検出される水深に基づいて、海底高度が一定となるように航行する請求項1または請求項2に記載の水中航走体。
【請求項4】
他の水中航走体と水平方向に間隔をあけて航行する場合において、隣接する他の水中航走体との水平方向における距離が一定となるように、航行を行う請求項1から請求項3のいずれかに記載の水中航走体。
【請求項5】
複数の水中航走体編隊を組んで航行する場合において、
前記水中航走体の各々は海底高度が一定となるように航行を行うとともに、隣接する他の水中航走体との水平方向における距離が一定となるように航行を行う水中航走体の編隊航行方法。
【請求項1】
測深手段と、
所定の領域において、位置情報と水深とが対応付けられた水深データベースと、
前記水深データベースが存在する領域において、該測深手段の計測値に基づいて作成された計測海底地形データと前記水深データベースとを照合することにより、現在位置を特定する第1位置特定手段と、
慣性航法装置と、
対地速度計と、
少なくとも前記水深データベースが存在しない領域において、前記慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定する第2位置特定手段と、
前記第2位置特定手段によって特定される現在位置を用いて航跡を生成する航跡生成手段と、
前記水深データベースを有しない領域から前記水深データベースを有する領域に進入した場合に、前記第1位置特定手段によって検出された現在位置に基づいて、前記第2位置特定手段によって特定される現在位置及び前記航跡生成手段によって生成された航跡を補正する航跡補正手段と
を具備する水中航走体。
【請求項2】
前記航跡補正手段は、前記第1位置特定手段によって検出された現在位置と前記第2位置特定手段によって特定された現在位置とを同定することにより、前記慣性航法装置が備えるジャイロの方位誤差、対地速度計のスケールファクタ誤差、及び対地速度計のバイアス誤差をそれぞれ算出し、このセンサ誤差に基づいて前記航跡を補正する請求項1に記載の水中航走体。
【請求項3】
前記測深手段によって検出される水深に基づいて、海底高度が一定となるように航行する請求項1または請求項2に記載の水中航走体。
【請求項4】
他の水中航走体と水平方向に間隔をあけて航行する場合において、隣接する他の水中航走体との水平方向における距離が一定となるように、航行を行う請求項1から請求項3のいずれかに記載の水中航走体。
【請求項5】
複数の水中航走体編隊を組んで航行する場合において、
前記水中航走体の各々は海底高度が一定となるように航行を行うとともに、隣接する他の水中航走体との水平方向における距離が一定となるように航行を行う水中航走体の編隊航行方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−107307(P2010−107307A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−278556(P2008−278556)
【出願日】平成20年10月29日(2008.10.29)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年10月29日(2008.10.29)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]