
水中走行車両およびその制御方法
【課題】本体からの走行部の突出を抑制しつつ、平衡走行をも確保できる水中走行車両および水中走行車両の制御方法を提供する。
【解決手段】水中走行車両1は、本体10と、その前後に設けられたフリッパ式クローラ30(走行部)と、前後のクローラ30を揺動させる移動手段と、移動手段を制御する演算手段を備え、演算手段は、車両に働くモーメント、すなわち、重量に起因するモーメントと、浮力に起因するモーメントと、前後方向の移動に伴う流体抵抗に起因するモーメントと、推進力に起因するモーメントと、接地面から受ける垂直抗力によって生じるモーメントに基づき、車両が平衡状態にあるか否かを判断し、平衡状態と判断した時には前後のクローラ30を格納位置に維持し、車両1が前方へ倒れる恐れが高いと判断した時には、前側のクローラを前方に半転させ、車両1が後方へ倒れる恐れが高いと判断した時には、後側のクローラ30を後方に半転させる。
【解決手段】水中走行車両1は、本体10と、その前後に設けられたフリッパ式クローラ30(走行部)と、前後のクローラ30を揺動させる移動手段と、移動手段を制御する演算手段を備え、演算手段は、車両に働くモーメント、すなわち、重量に起因するモーメントと、浮力に起因するモーメントと、前後方向の移動に伴う流体抵抗に起因するモーメントと、推進力に起因するモーメントと、接地面から受ける垂直抗力によって生じるモーメントに基づき、車両が平衡状態にあるか否かを判断し、平衡状態と判断した時には前後のクローラ30を格納位置に維持し、車両1が前方へ倒れる恐れが高いと判断した時には、前側のクローラを前方に半転させ、車両1が後方へ倒れる恐れが高いと判断した時には、後側のクローラ30を後方に半転させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、水中を走行して探査や作業を行う車両およびその制御方法に関する。
【背景技術】
【0002】
特許文献1の図8に示すように、車両本体の前後部に左右一対のフリッパ式クローラを配置した車両は公知である。この車両が平坦な整地を走行する場合には、前側のクローラを前方に水平に倒し、後側のクローラを後方に水平に倒し、これら前後のクローラを本体から大きく突出させて走行する。この車両が不整地を走行する場合には、クローラを凹凸に対応して揺動させて走行する。特許文献1には、上記車両が海底を走行することも記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平3−279087号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の車両は比較的自重が大きいため、姿勢安定性はあるが、水中での走行特性が劣り、しかも傾斜水底において表層の崩壊を惹起し、走行不能となる場合がある。また、大深度探査用の無人探査機として用いる場合には引き上げ時のケーブルへの負担が大きくなってしまう。
上記の観点から、水中走行車両を軽量にしたり、フロートにより浮力を増大させることが考えられるが、前に倒れたり、後に倒れ易くなる。特に、物体を保持、搬送する場合には、この物体の重量によって一層平衡性を損ない易い。
【課題を解決するための手段】
【0005】
本発明は上記課題を解決するためになされたものであり、本体と、この本体に設けられた走行手段とを備えた水中走行車両において、さらに演算手段を備え、この演算手段は、車両に働く所定の原点回りのモーメントに基づき水中走行車両の平衡性に関する情報を得ることを特徴とする。
この構成によれば、水中走行車両の平衡性に関する情報に基づき、水中走行車両を平衡状態で走行させるための制御が可能となる。
【0006】
好ましくは、上記車両に働く上記原点回りのモーメントが、車両重量に起因するモーメントと、車両に働く浮力に起因するモーメントと、車両の前後方向の移動に伴う流体抵抗に起因するモーメントと、車両の推進力に起因するモーメントと、車両が接地面から受ける垂直抗力によって生じるモーメントを含み、上記演算手段がこれらモーメントに基づき水中走行車両の平衡性に関する情報を得る。
この構成によれば、水中走行車両に働く主たるモーメントに基づき、平衡性に関する正確な情報を得ることができる。
【0007】
好ましくは、さらに車両の前後方向の傾斜角度を検出する傾斜センサを備え、上記演算手段は、この傾斜角度と車両重量と車両重心位置とから、上記車両重量に起因するモーメントを演算するとともに、この傾斜角度と浮心と浮力に基づき、上記浮力に起因するモーメントを演算する。
この構成によれば、重力と浮力による正確なモーメントを知ることができる。
【0008】
好ましくは、さらにマニピュレータと、このマニピュレータが保持する物体の荷重を検出する荷重センサと、物体の保持位置を検出する位置センサとを備え、上記車両に働くモーメントが物体の荷重に起因したモーメントをも含み、上記演算手段は、この物体の荷重に起因したモーメントを、上記マニピュレータで保持した物体の検出位置および検出荷重と、上記傾斜センサで検出した傾斜角度から演算する。
この構成によれば、車両が物体を保持するマニピュレータを備えている場合に、車両に働くモーメントをより正確に知ることができる。
【0009】
好ましくは、上記走行手段が前後の走行部を有し、さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、上記演算手段は、上記水中走行車両の平衡性に関する情報に基づき上記移動手段を介して、上記前後の走行部の位置を制御し、車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を、前方へ移動させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を後方へ移動させる。
この構成によれば、走行部の位置制御により車両の前倒れや後倒れを防止することができる。
【0010】
好ましくは、上記演算手段は、上記車両に働く複数のモーメントの総和がゼロとなる平衡条件が得られるような上記垂直抗力の仮想作用点の位置を演算し、当該仮想作用点の位置と、上記走行手段の最も前の接地点および最も後の接地点の位置との比較により、上記水中走行車両の平衡性に関する情報を得る。
この構成によれば、平衡条件を満たす垂直抗力の仮想作用点と最も前の接地点および最も後の接地点との比較により、水中走行車両の平衡性に関する正確な情報を簡単に得ることができる。
【0011】
好ましくは、上記走行手段が前後の走行部を有し、さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、上記演算手段は、上記垂直抗力の仮想作用点が、前側走行部の最も前の接地点と後側走行部の最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置するように、上記移動手段を介して、上記前後の走行部の位置を制御する。
この構成によれば、走行部の位置制御により車両の前倒れや後倒れを防止することができる。
【0012】
好ましくは、上記前後の走行部の各々は、左右一対のフリッパ式クローラからなり、各クローラは、一端が揺動可能に本体に支持され、他端が自由端となっており、選択的に接地される一対の直線部を含む無端条体を有し、前後のクローラが格納位置にある時に、前後のクローラの自由端同士が互いに向き合うとともに、各無端条体の上記一対の直線部の一方が接地しており、前側のクローラが格納位置から前方に回転することにより展開位置に至り、これにより、前側クローラの最も前の接地点が前方に変更されるとともに、各前側クローラにおいて上記無端条体の一対の直線部の他方が接地し、後側のクローラが格納位置から後方に回転することにより展開位置に至り、これにより、後側クローラの最も後の接地点が後方に変更されるとともに、各後側クローラにおいて上記無端条体の一対の直線部の他方が接地し、上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを展開位置に位置させ、上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを展開位置に位置させる。
この構成によれば、可能な限り前後のクローラを格納位置に納めて本体からの突出量を小さくすることにより、例えば調査等を行う場をできるだけ乱さないようにすることができる。また、車両に働くモーメントにより非平衡状態になるかそのおそれがある時には、前側のクローラを前方の展開位置に位置させることにより車両の前倒れを防止したり、後側のクローラを後方の展開位置に位置させることにより車両の後倒れを防止することができる。また、フリッパ式クローラを格納位置と展開位置との間で揺動することにより、簡単な制御で車両の平衡状態が得られる。
【0013】
好ましくは、上記前後の走行部の各々は、本体に前後方向にスライド可能に設けられた左右一対のスライド式クローラからなり、前側のクローラは本体の前後方向中心に最も近い格納位置から前方へ突出可能であり、後側のクローラは本体の前後方向中心に最も近い格納位置から後方へ突出可能であり、上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを格納位置より前方に位置させ、上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを格納位置より後方に位置させる。
この構成によれば、クローラのスライド制御により、車両の平衡状態を得ることができる。
【0014】
好ましくは、上記演算手段は、前側クローラを格納位置より前方に位置させる場合に、前側クローラの最も前の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ前方に位置するように、前側クローラをスライド制御し、後側クローラを格納位置より後方に位置させる場合に、後側クローラの最も後の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ後方に位置するように、後側クローラをスライド制御する。
この構成によれば、前後のクローラを無段階で制御することができ、これらクローラを最適位置にすることができる。
【0015】
本発明の他の態様では、本体と、この本体の前後にそれぞれ設けられた走行部とを有し、これら前後の走行部の位置がそれぞれ前後方向に変更可能な水中走行車両の制御方法において、車両に働くモーメントに基づき、前後の走行部が本体の前後方向中心に近い格納位置にあると想定した場合に水中走行車両が平衡状態か否かを判断する判断工程と、平衡状態と判断した時には前後の走行部を上記格納位置に位置させ、車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を上記格納位置よりも前方に位置させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を上記格納位置より後方に位置させる走行部制御工程と、を含む。
【発明の効果】
【0016】
本発明では、水中走行車両の平衡性に関する情報に基づき、水中走行車両を平衡状態で走行させるための制御が可能となる。
【図面の簡単な説明】
【0017】
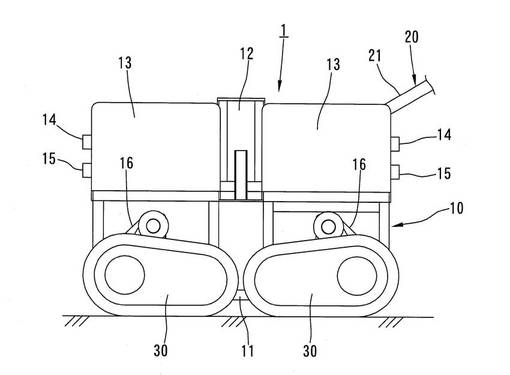
【図1】本発明の第1実施形態をなす水中走行車両を示す側面図であり、この車両のフリッパ式クローラが全て格納された状態を示す。
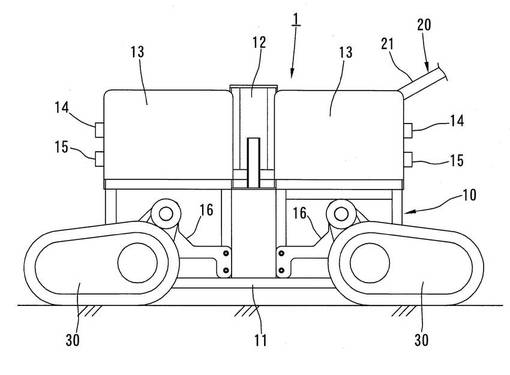
【図2】同車両を、全てのクローラが展開された状態で示す側面図である。
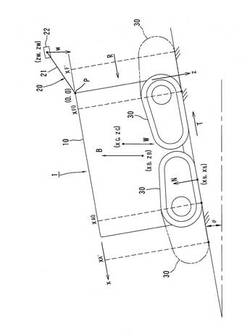
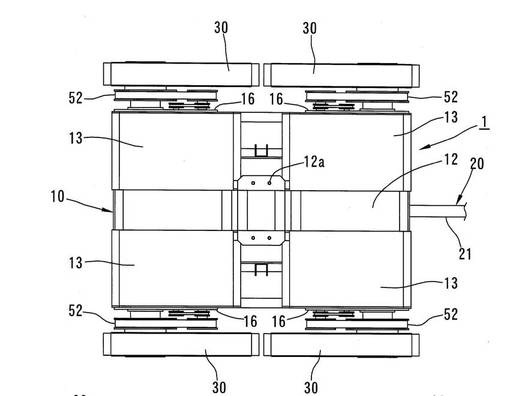
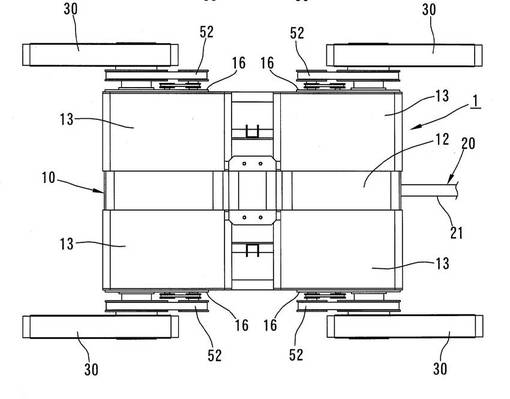
【図3】同車両を、全てのクローラが格納された状態で示す平面図である。
【図4】同車両を、全てのクローラが展開された状態で示す平面図である。
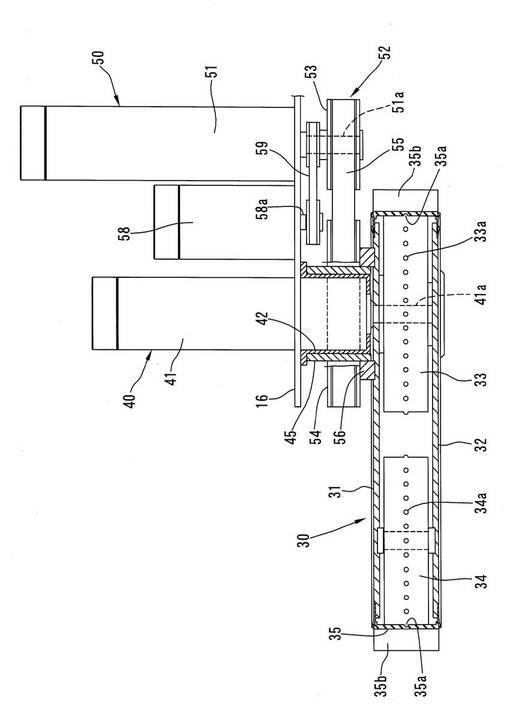
【図5】上記クローラの1つと、このクローラを走行駆動させるための駆動機構と、このクローラを格納位置と展開位置との間で略半回転させるための移動機構とを、一部断面にして示す拡大平面図である。
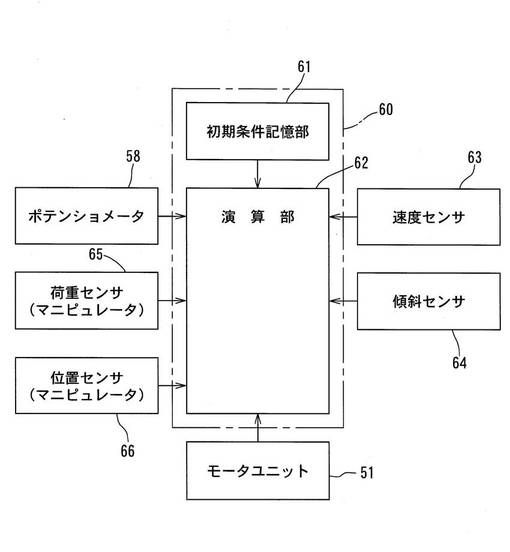
【図6】同車両で用いられる各種センサとコントロールユニットとを示すブロック図である。
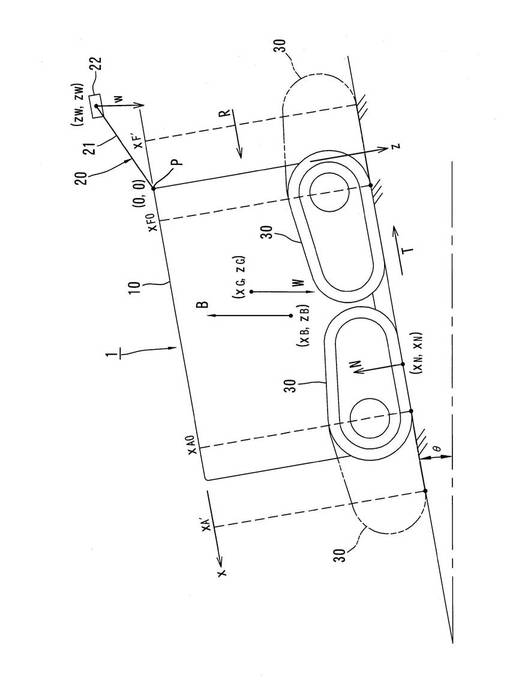
【図7】同車両が水中の傾斜面を上りながら前進する様子を示すとともに、x座標軸およびz座標軸と、車両に働く各種の力およびモーメントを示す概略図である。
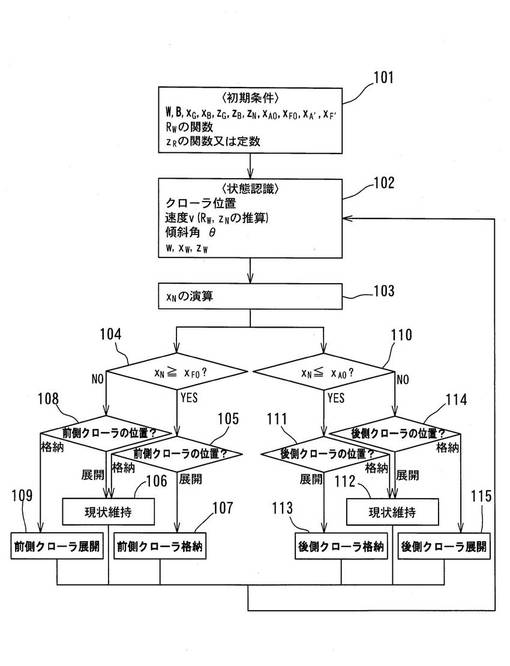
【図8】前後のクローラを格納位置と展開位置との間で揺動制御するためのフローチャートである。
【図9】本発明の第2実施形態をなす水中走行車両を示す側面図であり、前後のスライド式クローラが格納された状態で示す。
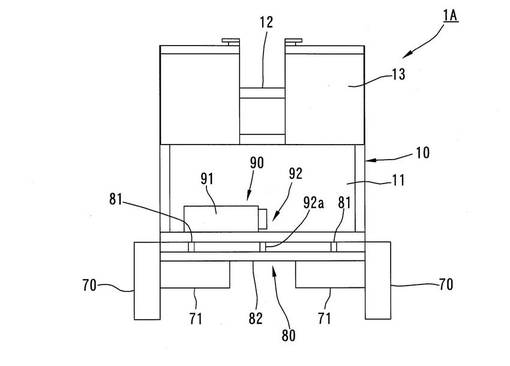
【図10】同第2実施形態の水中走行車両の正面図である。
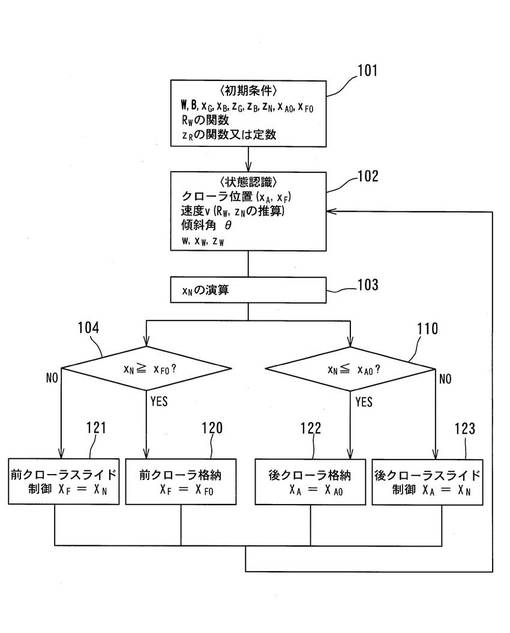
【図11】同第2実施形態において、前後のクローラをスライド制御するためのフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の一実施形態に係わる水中走行車両1(水中探査ロボットまたは水中作業ロボットともいう)について、図1〜図8を参照しながら説明する。本実施形態の水中走行車両1は比較的小型のクローラ型サービスロボットであり、母船または潜水艇等からの遠隔操作により走行されるようになっている。
説明の便宜上、図1〜図4の右側を車両1の前側とし、図1〜図4の左側を車両の後側とする。
【0019】
図1〜図4に示すように、車両1は本体10を備えている。この本体10は平面形状が矩形をなす下側のベース部11と、このベース部11に固定された上側の支持部12とを有している。支持部12は平面形状が十字形をなしている。
上記本体10の上部において、支持部12によって区画された4つの空間には4つのフロート13がそれぞれ収容され、本体10に固定されている。
上記支持部12の上面中央には引っ掛け孔12aが形成され、この引っ掛け孔12aに連結されたケーブル(図示しない)により、車両1が母船または潜水艇等から上げ降ろしされるようになっている。
【0020】
上記本体10の前端面および後端面には、ライト14とビデオカメラ15が設けられており、さらに上記本体10の上部かつ前部には、マニピュレータ20が設けられている。これらライト14、ビデオカメラ15、マニピュレータ20は、周知であるので詳しく説明せず、図において概略的に示す。
【0021】
上記マニピュレータ20は例えば、多関節のロボットアーム21と、このロボットアーム21の先端に設けられた保持部22(図7にのみ示す)とを有しており、水中にある物体を採取したり保持できるようになっている。
【0022】
本体10の下部には走行装置(走行手段)が設けられている。この走行装置は前後の走行部を備えており、各走行部は、左右一対のフリッパ式クローラ30を備えている。各クローラ30は、一端が本体10に揺動可能に支持され、他端が自由端となっている。
【0023】
各クローラ30は、図5に最も良く示されているように、一対の側板31,32と、これら側板31、32間に回転可能に支持された駆動ホイール33および従動ホイール34と、これらホイール33,34間に掛け渡された無端状のベルト35(無端条体)とを有している。
上記ベルト35の内周にはホイール33,34の突起33a,34aに噛み合う凹部35aが周方向に等間隔をなして形成されており、外周には多数の接地ラグ35bが周方向に離れて形成されている。
【0024】
図1〜図4に示すように、上記本体10のベース部11の前部および後部の左右側面には、各クローラ30に対応して支持フレーム16が固定されている。図5に示すように、この支持フレーム16にクローラ30が支持されるとともに、このクローラ30のための駆動機構40および移動機構50(移動手段)が支持されている。
【0025】
上記駆動機構40はモータユニット41を含む。このモータユニット41の一端部は上記支持フレーム16を貫通して、ケーシング42に収容固定されている。このケーシング42は有底円筒形状をなし、支持フレーム16に固定されている。なお、ケーシング42とクローラ30とは固定関係にない。
【0026】
上記モータユニット41の出力軸41aは、クローラ30の本体10に近い側板31を貫通し、駆動ホイール33に回転伝達可能に連結されている。その結果、モータユニット41の駆動により駆動ホイール33が回転し、これに伴いベルト35が回転する。モータユニット41が一方向に回転すると車両1が前進し、モータユニット41が逆転すると車両が後退する。
【0027】
上記移動機構50は、上記支持フレーム16に固定された他のモータユニット51と、このモータユニット51の出力軸51aとクローラ30との間に配置されたトルク伝達系52とを含んでいる。
【0028】
上記トルク伝達系52はタイミングベルト機構からなり、出力軸51aに固定された小径のプーリ53と、上記ケーシング42に樹脂製の円筒形状のブッシュ45を介して回転可能に支持された大径のプーリ54と、これらプーリ53,54間に掛け渡されたベルト55とを有している。上記プーリ54は、クローラ30の側板31に固定リング56を介して固定されている。
【0029】
上記モータユニット51の駆動により、その回転トルクがトルク伝達系52および固定リング56を介してクローラ30に伝達され、クローラ30がケーシング42の中心軸を中心として揺動される。具体的には、クローラ30は、図1、図3に示す位置(以下、格納位置と称す)と、図2、図4に示す位置(以下、展開位置と称す)との間を揺動される。
【0030】
上記格納位置では、クローラ30は本体10の前後方向中心に近く本体10の真横に位置し、クローラ30の前面または後面からの突出量は小さい。前後のクローラ30は格納位置においてその自由端同士が互いに接近して対峙しており、ベルト35の直線部が接地するようになっている。
上記展開位置では、クローラ30は本体10からの前面または後面から大きく突出する。
【0031】
格納位置と展開位置では、クローラ30のベルト35においてホイール33,34間に掛け渡された一対の直線部のいずれかが選択的に接地する。すなわち、格納位置ではベルト35の一方の直線部が接地し、展開位置では他方の直線部が接地する。格納位置と展開位置との間のクローラ30の揺動は、略半回転である。本実施形態では、駆動ホイール33が従動ホイール34より径が大きいので、180°より少し大きくなるが、両ホイール33,34の径が等しい場合には丁度180°である。
【0032】
図5に最も良く示すように、上記支持フレーム16にはさらにポテンショメータ58(角度センサまたは位置センサ)が固定されており、このポテンショメータ58の入力軸58aとモータユニット51の出力軸51aがタイミングベルト機構59で連結されることにより、上記クローラ30の揺動角度を検出し、ひいてはクローラ30の格納位置と展開位置を検出できるようになっている。
【0033】
車両1にはコントロールユニット60(コントローラ、図6にのみ示す)が搭載されている。このコントロールユニット60は、母船または潜水艇の基地局からの遠隔操作信号に応答して、クローラ30の駆動による車両1の前進、後退、旋回を実行し、マニピュレータ20を操作する。また、ビデオカメラ15からの映像信号を基地局へ送る。
【0034】
次に、クローラ30を自動で揺動制御するための構成を、図6を参照しながら説明する。コントロールユニット60は、後述する初期条件を記憶する記憶部61と、後述の図8のフローチャートに示す演算、制御を実行する演算部62(演算手段、プロセッサ)とを有している。この演算部62には検出情報を一時的に記憶する記憶部が付属している。
【0035】
上記車両1には、上記クローラ30の揺動角度を検出するポテンショメータ58の他に、車両1の走行速度を検出する速度センサ63と、車両1の前後方向の傾斜角度を検出する傾斜センサ64が搭載されている。
また、マニピュレータ20には、保持部22で保持した物体の水中での荷重を検出する荷重センサ65と、保持部22の位置を検出する位置センサ66が設けられている。
上記コントロールユニット60は、上記検出手段58、63〜66からの検出情報に基づいて、クローラ30の揺動制御を行う。以下、詳述する。
【0036】
図7に示すように車両1の前後方向に延びる軸をx座標軸とし、上下方向に延びる軸をz座標軸として設定する。車両1が水平で平坦な地面に接地している状態でx座標軸は水平に延びz座標軸は垂直に延びる。
原点P(x、z座標が0となる点)は任意に設定できるが、本実施形態では本体10の前端かつ上端に設定する。本実施形態では、x座標において原点Pより後方(図7において左方向)をプラスとし前方をマイナスとする。また、z座標において原点Pより下方をプラスとし上方をマイナスとする。
【0037】
車両1が母船または潜水艇等からケーブルに吊り下げられて水底に下ろされた時、全てのクローラ30は図7の実線で示す格納位置にある。この状態を車両1の基本状態と称することにする。格納位置にある前側のクローラ30の最も前の接地点のx座標はxF0であり、格納位置にある後側のクローラ30の最も後の接地点のx座標はxA0である。これらxF0,xA0はクローラ30が平坦な地面に載っている時の接地点であり、定数である。
【0038】
前述したように、車両1は起伏のある水中を前進したり後退したり、ビデオカメラ15による映像を母船または潜水艇等に送ったり、マニピュレータ20によって物体を採取したりする。
上記走行状態で、車両1には種々のモーメントが働く。コントロールユニット60は、上記原点Pを通り左右方向に延びる軸線を中心とした種々のモーメントに基づき、車両1が平衡状態にあるか否かを常時判断する。より正確には、車両1に作用する力およびモーメントのバランスから垂直抗力(反力)の作用点を算出し、この作用点が実際のクローラ30の接地面内に位置しているか否かによって判断する。
【0039】
車両1に働くモーメントは、下記の通りである。
M(W)・・・車両1の重量に起因する重力Wによって生じるモーメント。
M(B)・・・浮力Bによって生じるモーメント。
M(R)・・・車両1移動の際に車両1に働く流体抵抗Rによって生じるモーメント。
M(w)・・・マニピュレータ20で保持した物体の水中での荷重wに起因したモーメント。
M(T)・・・クローラ30による推進力Tに起因したモーメント。
M(N)・・・車両1が地面から受ける垂直抗力Nに起因したモーメント。
【0040】
ところで、x軸方向の力の釣り合いから、下記の式が成立する。
WsinΘ―BsinΘ+R−T+wsinΘ=0・・・(1)
この式(1)を書き直すと下記の通りである。
T=(W+w―B)sinΘ+R・・・(2)
【0041】
また、z方向の力の釣り合いから、下記式が成立する。
WcosΘ―BcosΘ−N+wcosΘ=0・・・(3)
この式(3)を書き直すと、下記の通りである。
N=(W+w−B)cosΘ ・・・(4)
【0042】
車両1の平衡状態は、上記モーメントの総和が0になることで得られ、これを式で表すと下記の通りである。
M(W)+M(w)+M(B)+M(R)+M(T)+M(N)=0・・・(5)
【0043】
以下、各モーメントを、車両1が傾斜角Θで傾斜した地面(水底面)を上りながら前進する場合について説明する。なお、時計周りのモーメントをプラスとし、反時計周りであるモーメントをマイナスとする。
【0044】
上記重力Wによって生じるモーメントは、下記の通りである。
M(W)=―W(xGcosΘ−zGsinΘ)・・・(6)
ただし、重心位置の座標は(xG,zG)で表される。W,xG,zGは既知の値である。Θは傾斜センサ64の検出角度により得られる。
【0045】
マニピュレータ20で保持された物体の荷重wに起因するモーメントM(w)は下記の通りである。
M(w)=−w(xwcosΘ−zwsinΘ) ・・・(7)
ただし、物体の重心位置の座標は(xw,zw)で表される。荷重wは荷重センサ65からの検出荷重により得られる。xw,zwは位置センサ66の検出位置により得られる。
なお、図7のように物体が原点Pの前方かつ上方に位置する場合には、xw,zwはマイナス値となるので、このモーメントM(w)は上記重力WのモーメントM(W)と逆方向になる。
【0046】
浮力BによるモーメントM(B)は下記の通りである。
M(B)=B(xBcosΘ−zBsinΘ)・・・(8)
ただし、浮心位置の座標は(xB,zB)で表される。B,xB,zBは既知の値である。
【0047】
流体抵抗Rによって生じるモーメントM(R)は下記の通りである。
M(R)=R・zR ・・・ (9)
なお、流体抵抗Rは速度センサ63での検出速度の関数(速度の2乗を含む)として求められる。流体抵抗Rは車両1の前面に働くが、そのみなし作用点は座標(0,zR)で表される。みなし作用点のz座標であるzRは、車両1の正面形状に対応した定数でもよいし、これに補正を加えるような速度の関数としてもよい。
【0048】
推進力Tによって生じるモーメントM(T)は下記の通りである。
M(T)=−T・zN ・・・ (10)
ただし、zNは地面でのz座標(クローラ30の接地面から原点Pまでの高さに相当する)であり、既知の数値である。
この式(10)に、上記式(2)を代入すると、下記式が得られる。
M(T)=―(W+w―B)zNsinΘ―R・zN ・・・ (11)
【0049】
垂直抗力Nによって生じるモーメントM(N)は下記の通りである。
M(N)=N・xN ・・・ (12)
ただし、垂直抗力Nの作用点(仮想作用点)のx座標であるxNは未知数である。
この式(12)に上記式(4)を代入すると下記式が得られる。
M(N)=(W+w−B)xNcosΘ・・・(13)
【0050】
上記式(6)〜(9),(11),(13)を平衡条件式(5)に代入すると、下記式が得られる。
―W(xGcosΘ−zGsinΘ)−w(xwcosΘ−zwsinΘ)+B(xBcosΘ−zBsinΘ)+R・zR―(W+w―B)zNsinΘ―R・zN+(W+w−B)xNcosΘ=0
・・・(14)
上記式(14)から、平衡条件(すなわち、通常走行可能条件)を満たすための未知のxNを求める式が得られる。
xN={W(xGcosΘ−zGsinΘ)+w(xwcosΘ−zwsinΘ)―B(xBcosΘ−zBsinΘ)+R(zN―zR)+(W+w―B)zNsinΘ}/(W+w−B)cosΘ
・・・(15)
【0051】
上記式(15)で求めた垂直抗力Nの仮想作用点xNが、前側クローラ30における最も前の接地点と、後側クローラ30における最も後の接地点との間にあれば、車両1は平衡状態(すなわち、通常走行可能条件を満たした状態)にある。
【0052】
コントロールユニット60は、前後のクローラ30が格納位置にあると仮定した時に車両1が平衡状態にあるか否かを判断する。すなわち、上記垂直抗力Nの仮想作用点xNが、格納位置にある前側クローラ30における最も前の接地点xF0と、格納位置にある後側クローラ30における最も後の接地点xA0との間にあるか否かを判断する。式で表すと下記の通りである。
xF0≦xN≦xA0 ・・・(16)
【0053】
コントロールユニット60は、上記式(16)を満足する場合には、前後のクローラ30が格納位置にある基本状態を維持する。
上記垂直抗力Nの作用点xNが、式(16)を満足せずxA0より後方に位置する場合、すなわち、xN>xA0の時には、後側のクローラ30を図7の想像線で示すように後方に回す。これにより、後側のクローラ30が展開位置となり、このクローラ30の最も後の接地点のx座標がxA0からxA’へと変わる。これにより、平衡条件(xN≦xA’)を満足することができる。
【0054】
上記垂直抗力Nの作用点xNが、式(16)を満足せずxF0より前方に位置する場合、すなわち、xN<xF0の時には、前側のクローラ30を図7の想像線で示すように前方に回す。これにより、前側のクローラ30が展開位置となり、このクローラ30の最も前の接地点のx座標がxF0からxF’へと変わる。これにより、平衡条件(xN≦xF’)を満足することができる。
【0055】
コントロールユニット60は可能な限り全てのクローラ30が格納位置にあるようにクローラ30を揺動制御する。すなわち、一旦クローラ30が展開されても、常時、格納位置でも平衡条件が成立するか否かを監視し、成立すると判断した時には展開位置から格納位置へとクローラ30を回す。これにより、本体10からのクローラ30の突出量をできるだけ抑えて調査の対象である水底の地層を乱さないで済む。
【0056】
車両1が傾斜した地面を下りながら前進する場合には、傾斜角度Θがマイナスの値をとるだけで、xNは式(15)によって求められる。
【0057】
車両1が図7に示す状態で傾斜した地面を左方向に移動する場合、すなわち、傾斜面を下がりながら後退する場合には、流体抵抗Rと推進力Tが逆向きになる。
x軸方向の力の釣り合いから、下記の式が成立する。
WsinΘ―BsinΘ―R+T+wsinΘ=0・・・(1’)
この式(1)を書き直すと下記の通りである。
T=(B−W―w)sinΘ+R・・・(2’)
【0058】
また、z方向の力の釣り合いから得られる式は、前述した傾斜地面を上りながら前進する場合と同様に下記式が成立する。
WcosΘ―BcosΘ−N+wcosΘ=0・・・(3)
この式(3)を書き直すと、下記の通りである。
N=(W+w−B)cosΘ ・・・(4)
【0059】
流体抵抗Rによって生じるモーメントM(R)は下記の通りである。
M(R)=―R・zR ・・・ (9’)
推進力Tによって生じるモーメントM(T)は下記の通りである。
M(T)=T・zN ・・・ (10’)
この式(10)に、上記式(2)を代入すると、下記式が得られる。
M(T)=(B―W―w)zNsinΘ+R・zN ・・・ (11’)
【0060】
上記式(9’)、(11’)を式(9)、(10)の代わりに式(5)に代入することにより、下記式が得られる。
xN={W(xGcosΘ−zGsinΘ)+w(xwcosΘ−zwsinΘ)―B(xBcosΘ−zBsinΘ)―R(zN―zR)+(W+w―B)zNsinΘ}/(W+w−B)cosΘ
・・・(15’)
xNを用いた制御は前述と同様であるから、説明を省略する。
【0061】
なお、車両1が上り傾斜した地面を後退する場合には、傾斜角度Θがマイナスの値をとるだけで、xNは式(15’)によって求められる。
【0062】
次に、図8に示すフローチャートを参照しながら、前後のクローラ30の揺動制御について説明する。
初期条件として、既知の数値W,B,xG,xB,zG,zB,zN,xA0,xF0,xA’,xF’ を予めコントロールユニット60に入力する(ステップ101)。また、同ステップにおいて流体抵抗Rを求めるための関数を入力し、流体抵抗Rのみなし作用点のz座標であるzRを求める関数または定数を入力する。これら初期条件の情報は初期条件記憶部61で記憶される。
【0063】
コントロールユニット60の演算部62では常時以下のルーチンを実行する。まず、車両1の状態を認識する(ステップ102)。すなわち、ポテンショメータ58からの情報により前後のクローラ位置(格納位置か展開位置か)を認識する。速度センサ63からの情報により、車両1の速度vを認識し、この速度vから流体抵抗Rと流体抵抗Rのみなし作用点のz座標であるzRを演算する。また、傾斜センサ64からの情報により、車両1の傾斜角度Θを認識する。さらに荷重センサ65および位置センサ66からの情報により、マニピュレータ20で保持している物体の荷重w、および位置(xw、zw)を認識する。
【0064】
次に、上記メモリに記憶された初期条件の情報とステップ101で得た情報を用い、上記式(15)または(15’)に基づき、平衡状態を維持するための垂直抗力Nの作用点のx座標であるxNを求める(ステップ103)。
【0065】
次に、前後のクローラ30の制御を並列処理で実行する。まず、前側のクローラ30の制御について説明する。
ステップ104で、平衡条件の一部を満足するか否か、すなわちxN≧xF0を満足するか否かを判断する。
【0066】
上記ステップ104で肯定判断した時には、前側のクローラ30を格納位置にする。すなわち、前側クローラ30が格納位置にあるか否かを判断し(ステップ105)、ここで格納位置にあると判断した場合にはその格納位置を維持し(ステップ106)、展開位置にあると判断した場合には前側クローラ30を回して格納位置にする(ステップ107)。
【0067】
上記ステップ104で否定判断した時、すなわち平衡条件xN≧xF0を満足しないと判断した時には、前側のクローラ30を展開位置にする。すなわち、前側クローラ30が展開位置にあるか否かを判断し(ステップ108)、ここで展開位置にあると判断した場合にはその展開位置を維持し(ステップ106)、格納位置にあると判断した場合には前側クローラ30を回して展開位置にする(ステップ109)。
【0068】
次に、後側のクローラ30の制御について説明する。
ステップ110で、平衡条件の一部を満足するか否か、すなわちxN≦xA0を満足するか否かを判断する。
上記ステップ110で肯定判断した時には、後側のクローラ30を格納位置にする。すなわち、後側クローラ30が格納位置にあるか否かを判断し(ステップ111)、ここで格納位置にあると判断した場合にはその格納位置を維持し(ステップ112)、展開位置にあると判断した場合には後側クローラ30を回して格納位置にする(ステップ113)。
【0069】
上記ステップ110で否定判断した時には、後側のクローラ30を展開位置にする。すなわち、後側クローラ30が展開位置にあるか否かを判断し(ステップ114)、ここで展開位置にあると判断した場合にはその展開位置を維持し(ステップ112)、格納位置にあると判断した場合には後側クローラ30を回して展開位置にする(ステップ115)。
【0070】
上記図8のルーチンでは、展開時のクローラ30の最前の接地点座標xF’および最も後の接地点座標xA’を制御に用いていないが、例えば展開した状態での平衡条件を満たすか否かの確認、すなわちxN≧xF’を満足するか否か、またはxN≦xA’を満足するか否かの確認のために用いてもよい。この平衡条件を満足できない場合には、警告を発したり、車両速度の調節を促したり、マニピュレータ20により物体の位置を変化させるようにしてもよい。
ちなみに、図8のルーチンでは、図2のように前後のクローラ30が同時に展開することは稀である。
【0071】
図8のルーチンにおいて、所定の余裕分αを見てクローラの展開を図ることもできる。この場合、ステップ104ではxN≧xF0+αか否かの判断がなされ、ステップ110ではxN≦xA0−αか否かの判断がなされる。
【0072】
次に、本発明の第2実施形態について、図9〜11を参照しながら説明する。この実施形態の車両1Aの本体は、第1実施形態の車両1の本体10と同様であるので、同番号を付してその詳細な説明を省略する。また、本体10に装備されるマニピュレータ、ライト、カメラ等は図示を省略する。
【0073】
第2実施形態の車両1Aは、スライド式クローラ70(走行部)を用いている点で、第1実施形態と異なる。なお、このクローラ70は形状が異なるものの第1実施形態のクローラ30と同様の構造を有しているので、その詳細な説明を省略する。各クローラ70には、駆動ホイールを回転駆動させてクローラベルトを回すためのモータユニット71(駆動機構)が連結されている。
【0074】
クローラ70をスライド可能に支持する機構80は、本体10のベース部11の下面に設けられた左右一対の前後方向に延びるリニアガイド81と、これらリニアガイド81により前後方向にスライド可能に支持された板形状の前後一対の移動体82とを有している。各移動体82には、左右一対のクローラ70と、これらクローラ70とモータユニット71が取り付けられている。
【0075】
前側の一対のクローラ70と後側の一対のクローラ70は、それぞれ移動機構90(移動手段)により独立して前後方向に移動される。この移動機構90は、モータユニット91と、このモータユニット91の回転トルクを移動体82の直線運動に変換する変換機構92とを有している。変換機構92は例えば移動体82に固定されて前後方向に延びるラック92aと、このラック92aに噛み合うピニオン(図示しない)とを有している。ピニオンは、直接に、またはギアやタイミングベルト機構等を介して間接的に、モータユニット91の出力軸に連結されている。
【0076】
各移動体72の位置ひいては各一対のクローラ70の位置は、モータユニット91に連結されたポテンショメータ等の位置センサにより検出されるようになっている。
図6における構成(ポテンショメータ58を除く)は、本実施形態でも用いられる。
【0077】
次に、第2実施形態のコントロールユニットで実行されるルーチンを図11を参照しながら説明する。図11において図8に対応するステップには同番号を付す。
ステップ101において入力される初期条件は第1実施形態と同様である。ただし、xA0は、後側のクローラ70が本体10の中心に最も近いスライド位置(以下、格納位置と称す)にある時の最も後の接地点のx座標である。また、xF0は、前側のクローラ70が本体10の中心に最も近いスライド位置(以下、格納位置と称す)にある時の最も前の接地点のx座標である。
【0078】
ステップ102での状態認識も第1実施形態と同様である。ただし、クローラ70の位置として、後側のクローラ70の最も後の接地点のx座標であるxAと、前側のクローラ70の最前の接地点のx座標であるxFが、上記位置センサからの検出情報により認識される。
【0079】
ステップ103,104,110は第1実施形態と同様である。
ステップ104で肯定判断した時には、ステップ120に進み、ここで前側クローラ70を格納位置にする。すなわち、前側のクローラ70が格納位置にある時(xF=xF0)にはその格納位置を維持し、前方へ突出している時(xF<xF0)には、格納位置までスライドさせる。
ステップ104で否定判断した時には、ステップ121に進み、ここで前クローラ70の最も前の接地点の座標xFが平衡条件で得られたxNになるように、前クローラ70をスライド制御する。この制御は、検出座標xFによるフィードバック制御である。
【0080】
同様に、ステップ110で肯定判断した時には、ステップ122に進み、ここで後側クローラ70を格納位置にする。すなわち、後側のクローラ70が格納位置にある時(xA=xA0)にはその格納位置を維持し、後方へ突出している時(xA>xA0)には、格納位置までスライドさせる。
ステップ110で否定判断した時には、ステップ123に進み、ここで後側クローラ70の最も後の接地点の座標xAが平衡条件で得られたxNになるように、後側クローラ70をスライド制御する。この制御は、検出座標xAによるフィードバック制御である。
【0081】
なお、上述した第2実施形態において、所定の余裕分をもって制御する場合には、ステップ121では、xF=xN−αとなるように制御し、ステップ123では、xA=xN+αとなるように制御する。なお、この場合、ステップ104で(xN≧xF0+α?)の判断を行い、ステップ110で(xN≦xA0−α?)の判断を行うのが好ましい。
【0082】
本発明は、上記実施例に制約されず、種々の態様を採用することができる。例えば、第1実施形態において、左右にメインクローラを備え、本発明の走行部としてフリッパ式の補助クローラを備えたものでもよい。
第2実施形態において、スライド式クローラを、格納位置と最大限に突出した展開位置の2つ位置を選択するように、スライド制御してもよい。
【0083】
第1、第2実施形態において、コントロールユニット60は、水流等の所定の条件に応じ、格納位置で平衡状態を維持できると判断した場合でも、クローラの展開位置または突出位置を維持するようにしてもよい。また、遠隔操作をコントロールユニット60による自動制御に優先させることにより、クローラの展開位置または突出位置を維持することもできる。
【0084】
コントロールユニット60は、式(15)または式(15’)で求めた垂直抗力の仮想作用点位置xNが、式(16)を満足するか否か(平衡条件を満足するか否か)を判断するだけでもよい。この場合、判断情報は前倒れまたは後倒れを警告する情報を含む。基地局ではこの判断情報(平衡性に関する情報)に基づいて、クローラの位置及び車両の速度を遠隔制御する。
【0085】
走行装置は、左右一対のクローラだけで構成してもよい。この場合、コントロールユニット60は、上記と同様に式(16)を満足するか否か(平衡条件を満足するか否か)を判断する。この場合、クローラの最も前の接地点位置、最も後の接地点位置が前述の式のxF0、xA0で表される。基地局ではこの判断情報に基づいて、車両の走行速度を制御することにより、前倒れ、後倒れを回避する。走行速度制御の代わりにコントローラユニット60の自動制御または基地局からの遠隔制御により、位置変更可能な重錘を用いた重心位置制御や、浮心位置制御を行ってもよい。
【産業上の利用可能性】
【0086】
本発明は、水中での探査や作業等に用いられる水中走行車両に適している。
【符号の説明】
【0087】
1、1A 水中走行車両
10 本体
30 フリッパ式クローラ(走行部)
50 移動機構(移動手段)
60 コントロールユニット
62 演算部(演算手段、プロセッサ)
63 速度センサ
64 傾斜センサ
65 荷重センサ
66 位置センサ
70 スライド式クローラ(走行部)
90 移動機構(移動手段)
【技術分野】
【0001】
本発明は、水中を走行して探査や作業を行う車両およびその制御方法に関する。
【背景技術】
【0002】
特許文献1の図8に示すように、車両本体の前後部に左右一対のフリッパ式クローラを配置した車両は公知である。この車両が平坦な整地を走行する場合には、前側のクローラを前方に水平に倒し、後側のクローラを後方に水平に倒し、これら前後のクローラを本体から大きく突出させて走行する。この車両が不整地を走行する場合には、クローラを凹凸に対応して揺動させて走行する。特許文献1には、上記車両が海底を走行することも記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平3−279087号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の車両は比較的自重が大きいため、姿勢安定性はあるが、水中での走行特性が劣り、しかも傾斜水底において表層の崩壊を惹起し、走行不能となる場合がある。また、大深度探査用の無人探査機として用いる場合には引き上げ時のケーブルへの負担が大きくなってしまう。
上記の観点から、水中走行車両を軽量にしたり、フロートにより浮力を増大させることが考えられるが、前に倒れたり、後に倒れ易くなる。特に、物体を保持、搬送する場合には、この物体の重量によって一層平衡性を損ない易い。
【課題を解決するための手段】
【0005】
本発明は上記課題を解決するためになされたものであり、本体と、この本体に設けられた走行手段とを備えた水中走行車両において、さらに演算手段を備え、この演算手段は、車両に働く所定の原点回りのモーメントに基づき水中走行車両の平衡性に関する情報を得ることを特徴とする。
この構成によれば、水中走行車両の平衡性に関する情報に基づき、水中走行車両を平衡状態で走行させるための制御が可能となる。
【0006】
好ましくは、上記車両に働く上記原点回りのモーメントが、車両重量に起因するモーメントと、車両に働く浮力に起因するモーメントと、車両の前後方向の移動に伴う流体抵抗に起因するモーメントと、車両の推進力に起因するモーメントと、車両が接地面から受ける垂直抗力によって生じるモーメントを含み、上記演算手段がこれらモーメントに基づき水中走行車両の平衡性に関する情報を得る。
この構成によれば、水中走行車両に働く主たるモーメントに基づき、平衡性に関する正確な情報を得ることができる。
【0007】
好ましくは、さらに車両の前後方向の傾斜角度を検出する傾斜センサを備え、上記演算手段は、この傾斜角度と車両重量と車両重心位置とから、上記車両重量に起因するモーメントを演算するとともに、この傾斜角度と浮心と浮力に基づき、上記浮力に起因するモーメントを演算する。
この構成によれば、重力と浮力による正確なモーメントを知ることができる。
【0008】
好ましくは、さらにマニピュレータと、このマニピュレータが保持する物体の荷重を検出する荷重センサと、物体の保持位置を検出する位置センサとを備え、上記車両に働くモーメントが物体の荷重に起因したモーメントをも含み、上記演算手段は、この物体の荷重に起因したモーメントを、上記マニピュレータで保持した物体の検出位置および検出荷重と、上記傾斜センサで検出した傾斜角度から演算する。
この構成によれば、車両が物体を保持するマニピュレータを備えている場合に、車両に働くモーメントをより正確に知ることができる。
【0009】
好ましくは、上記走行手段が前後の走行部を有し、さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、上記演算手段は、上記水中走行車両の平衡性に関する情報に基づき上記移動手段を介して、上記前後の走行部の位置を制御し、車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を、前方へ移動させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を後方へ移動させる。
この構成によれば、走行部の位置制御により車両の前倒れや後倒れを防止することができる。
【0010】
好ましくは、上記演算手段は、上記車両に働く複数のモーメントの総和がゼロとなる平衡条件が得られるような上記垂直抗力の仮想作用点の位置を演算し、当該仮想作用点の位置と、上記走行手段の最も前の接地点および最も後の接地点の位置との比較により、上記水中走行車両の平衡性に関する情報を得る。
この構成によれば、平衡条件を満たす垂直抗力の仮想作用点と最も前の接地点および最も後の接地点との比較により、水中走行車両の平衡性に関する正確な情報を簡単に得ることができる。
【0011】
好ましくは、上記走行手段が前後の走行部を有し、さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、上記演算手段は、上記垂直抗力の仮想作用点が、前側走行部の最も前の接地点と後側走行部の最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置するように、上記移動手段を介して、上記前後の走行部の位置を制御する。
この構成によれば、走行部の位置制御により車両の前倒れや後倒れを防止することができる。
【0012】
好ましくは、上記前後の走行部の各々は、左右一対のフリッパ式クローラからなり、各クローラは、一端が揺動可能に本体に支持され、他端が自由端となっており、選択的に接地される一対の直線部を含む無端条体を有し、前後のクローラが格納位置にある時に、前後のクローラの自由端同士が互いに向き合うとともに、各無端条体の上記一対の直線部の一方が接地しており、前側のクローラが格納位置から前方に回転することにより展開位置に至り、これにより、前側クローラの最も前の接地点が前方に変更されるとともに、各前側クローラにおいて上記無端条体の一対の直線部の他方が接地し、後側のクローラが格納位置から後方に回転することにより展開位置に至り、これにより、後側クローラの最も後の接地点が後方に変更されるとともに、各後側クローラにおいて上記無端条体の一対の直線部の他方が接地し、上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを展開位置に位置させ、上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを展開位置に位置させる。
この構成によれば、可能な限り前後のクローラを格納位置に納めて本体からの突出量を小さくすることにより、例えば調査等を行う場をできるだけ乱さないようにすることができる。また、車両に働くモーメントにより非平衡状態になるかそのおそれがある時には、前側のクローラを前方の展開位置に位置させることにより車両の前倒れを防止したり、後側のクローラを後方の展開位置に位置させることにより車両の後倒れを防止することができる。また、フリッパ式クローラを格納位置と展開位置との間で揺動することにより、簡単な制御で車両の平衡状態が得られる。
【0013】
好ましくは、上記前後の走行部の各々は、本体に前後方向にスライド可能に設けられた左右一対のスライド式クローラからなり、前側のクローラは本体の前後方向中心に最も近い格納位置から前方へ突出可能であり、後側のクローラは本体の前後方向中心に最も近い格納位置から後方へ突出可能であり、上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを格納位置より前方に位置させ、上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを格納位置より後方に位置させる。
この構成によれば、クローラのスライド制御により、車両の平衡状態を得ることができる。
【0014】
好ましくは、上記演算手段は、前側クローラを格納位置より前方に位置させる場合に、前側クローラの最も前の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ前方に位置するように、前側クローラをスライド制御し、後側クローラを格納位置より後方に位置させる場合に、後側クローラの最も後の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ後方に位置するように、後側クローラをスライド制御する。
この構成によれば、前後のクローラを無段階で制御することができ、これらクローラを最適位置にすることができる。
【0015】
本発明の他の態様では、本体と、この本体の前後にそれぞれ設けられた走行部とを有し、これら前後の走行部の位置がそれぞれ前後方向に変更可能な水中走行車両の制御方法において、車両に働くモーメントに基づき、前後の走行部が本体の前後方向中心に近い格納位置にあると想定した場合に水中走行車両が平衡状態か否かを判断する判断工程と、平衡状態と判断した時には前後の走行部を上記格納位置に位置させ、車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を上記格納位置よりも前方に位置させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を上記格納位置より後方に位置させる走行部制御工程と、を含む。
【発明の効果】
【0016】
本発明では、水中走行車両の平衡性に関する情報に基づき、水中走行車両を平衡状態で走行させるための制御が可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の第1実施形態をなす水中走行車両を示す側面図であり、この車両のフリッパ式クローラが全て格納された状態を示す。
【図2】同車両を、全てのクローラが展開された状態で示す側面図である。
【図3】同車両を、全てのクローラが格納された状態で示す平面図である。
【図4】同車両を、全てのクローラが展開された状態で示す平面図である。
【図5】上記クローラの1つと、このクローラを走行駆動させるための駆動機構と、このクローラを格納位置と展開位置との間で略半回転させるための移動機構とを、一部断面にして示す拡大平面図である。
【図6】同車両で用いられる各種センサとコントロールユニットとを示すブロック図である。
【図7】同車両が水中の傾斜面を上りながら前進する様子を示すとともに、x座標軸およびz座標軸と、車両に働く各種の力およびモーメントを示す概略図である。
【図8】前後のクローラを格納位置と展開位置との間で揺動制御するためのフローチャートである。
【図9】本発明の第2実施形態をなす水中走行車両を示す側面図であり、前後のスライド式クローラが格納された状態で示す。
【図10】同第2実施形態の水中走行車両の正面図である。
【図11】同第2実施形態において、前後のクローラをスライド制御するためのフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の一実施形態に係わる水中走行車両1(水中探査ロボットまたは水中作業ロボットともいう)について、図1〜図8を参照しながら説明する。本実施形態の水中走行車両1は比較的小型のクローラ型サービスロボットであり、母船または潜水艇等からの遠隔操作により走行されるようになっている。
説明の便宜上、図1〜図4の右側を車両1の前側とし、図1〜図4の左側を車両の後側とする。
【0019】
図1〜図4に示すように、車両1は本体10を備えている。この本体10は平面形状が矩形をなす下側のベース部11と、このベース部11に固定された上側の支持部12とを有している。支持部12は平面形状が十字形をなしている。
上記本体10の上部において、支持部12によって区画された4つの空間には4つのフロート13がそれぞれ収容され、本体10に固定されている。
上記支持部12の上面中央には引っ掛け孔12aが形成され、この引っ掛け孔12aに連結されたケーブル(図示しない)により、車両1が母船または潜水艇等から上げ降ろしされるようになっている。
【0020】
上記本体10の前端面および後端面には、ライト14とビデオカメラ15が設けられており、さらに上記本体10の上部かつ前部には、マニピュレータ20が設けられている。これらライト14、ビデオカメラ15、マニピュレータ20は、周知であるので詳しく説明せず、図において概略的に示す。
【0021】
上記マニピュレータ20は例えば、多関節のロボットアーム21と、このロボットアーム21の先端に設けられた保持部22(図7にのみ示す)とを有しており、水中にある物体を採取したり保持できるようになっている。
【0022】
本体10の下部には走行装置(走行手段)が設けられている。この走行装置は前後の走行部を備えており、各走行部は、左右一対のフリッパ式クローラ30を備えている。各クローラ30は、一端が本体10に揺動可能に支持され、他端が自由端となっている。
【0023】
各クローラ30は、図5に最も良く示されているように、一対の側板31,32と、これら側板31、32間に回転可能に支持された駆動ホイール33および従動ホイール34と、これらホイール33,34間に掛け渡された無端状のベルト35(無端条体)とを有している。
上記ベルト35の内周にはホイール33,34の突起33a,34aに噛み合う凹部35aが周方向に等間隔をなして形成されており、外周には多数の接地ラグ35bが周方向に離れて形成されている。
【0024】
図1〜図4に示すように、上記本体10のベース部11の前部および後部の左右側面には、各クローラ30に対応して支持フレーム16が固定されている。図5に示すように、この支持フレーム16にクローラ30が支持されるとともに、このクローラ30のための駆動機構40および移動機構50(移動手段)が支持されている。
【0025】
上記駆動機構40はモータユニット41を含む。このモータユニット41の一端部は上記支持フレーム16を貫通して、ケーシング42に収容固定されている。このケーシング42は有底円筒形状をなし、支持フレーム16に固定されている。なお、ケーシング42とクローラ30とは固定関係にない。
【0026】
上記モータユニット41の出力軸41aは、クローラ30の本体10に近い側板31を貫通し、駆動ホイール33に回転伝達可能に連結されている。その結果、モータユニット41の駆動により駆動ホイール33が回転し、これに伴いベルト35が回転する。モータユニット41が一方向に回転すると車両1が前進し、モータユニット41が逆転すると車両が後退する。
【0027】
上記移動機構50は、上記支持フレーム16に固定された他のモータユニット51と、このモータユニット51の出力軸51aとクローラ30との間に配置されたトルク伝達系52とを含んでいる。
【0028】
上記トルク伝達系52はタイミングベルト機構からなり、出力軸51aに固定された小径のプーリ53と、上記ケーシング42に樹脂製の円筒形状のブッシュ45を介して回転可能に支持された大径のプーリ54と、これらプーリ53,54間に掛け渡されたベルト55とを有している。上記プーリ54は、クローラ30の側板31に固定リング56を介して固定されている。
【0029】
上記モータユニット51の駆動により、その回転トルクがトルク伝達系52および固定リング56を介してクローラ30に伝達され、クローラ30がケーシング42の中心軸を中心として揺動される。具体的には、クローラ30は、図1、図3に示す位置(以下、格納位置と称す)と、図2、図4に示す位置(以下、展開位置と称す)との間を揺動される。
【0030】
上記格納位置では、クローラ30は本体10の前後方向中心に近く本体10の真横に位置し、クローラ30の前面または後面からの突出量は小さい。前後のクローラ30は格納位置においてその自由端同士が互いに接近して対峙しており、ベルト35の直線部が接地するようになっている。
上記展開位置では、クローラ30は本体10からの前面または後面から大きく突出する。
【0031】
格納位置と展開位置では、クローラ30のベルト35においてホイール33,34間に掛け渡された一対の直線部のいずれかが選択的に接地する。すなわち、格納位置ではベルト35の一方の直線部が接地し、展開位置では他方の直線部が接地する。格納位置と展開位置との間のクローラ30の揺動は、略半回転である。本実施形態では、駆動ホイール33が従動ホイール34より径が大きいので、180°より少し大きくなるが、両ホイール33,34の径が等しい場合には丁度180°である。
【0032】
図5に最も良く示すように、上記支持フレーム16にはさらにポテンショメータ58(角度センサまたは位置センサ)が固定されており、このポテンショメータ58の入力軸58aとモータユニット51の出力軸51aがタイミングベルト機構59で連結されることにより、上記クローラ30の揺動角度を検出し、ひいてはクローラ30の格納位置と展開位置を検出できるようになっている。
【0033】
車両1にはコントロールユニット60(コントローラ、図6にのみ示す)が搭載されている。このコントロールユニット60は、母船または潜水艇の基地局からの遠隔操作信号に応答して、クローラ30の駆動による車両1の前進、後退、旋回を実行し、マニピュレータ20を操作する。また、ビデオカメラ15からの映像信号を基地局へ送る。
【0034】
次に、クローラ30を自動で揺動制御するための構成を、図6を参照しながら説明する。コントロールユニット60は、後述する初期条件を記憶する記憶部61と、後述の図8のフローチャートに示す演算、制御を実行する演算部62(演算手段、プロセッサ)とを有している。この演算部62には検出情報を一時的に記憶する記憶部が付属している。
【0035】
上記車両1には、上記クローラ30の揺動角度を検出するポテンショメータ58の他に、車両1の走行速度を検出する速度センサ63と、車両1の前後方向の傾斜角度を検出する傾斜センサ64が搭載されている。
また、マニピュレータ20には、保持部22で保持した物体の水中での荷重を検出する荷重センサ65と、保持部22の位置を検出する位置センサ66が設けられている。
上記コントロールユニット60は、上記検出手段58、63〜66からの検出情報に基づいて、クローラ30の揺動制御を行う。以下、詳述する。
【0036】
図7に示すように車両1の前後方向に延びる軸をx座標軸とし、上下方向に延びる軸をz座標軸として設定する。車両1が水平で平坦な地面に接地している状態でx座標軸は水平に延びz座標軸は垂直に延びる。
原点P(x、z座標が0となる点)は任意に設定できるが、本実施形態では本体10の前端かつ上端に設定する。本実施形態では、x座標において原点Pより後方(図7において左方向)をプラスとし前方をマイナスとする。また、z座標において原点Pより下方をプラスとし上方をマイナスとする。
【0037】
車両1が母船または潜水艇等からケーブルに吊り下げられて水底に下ろされた時、全てのクローラ30は図7の実線で示す格納位置にある。この状態を車両1の基本状態と称することにする。格納位置にある前側のクローラ30の最も前の接地点のx座標はxF0であり、格納位置にある後側のクローラ30の最も後の接地点のx座標はxA0である。これらxF0,xA0はクローラ30が平坦な地面に載っている時の接地点であり、定数である。
【0038】
前述したように、車両1は起伏のある水中を前進したり後退したり、ビデオカメラ15による映像を母船または潜水艇等に送ったり、マニピュレータ20によって物体を採取したりする。
上記走行状態で、車両1には種々のモーメントが働く。コントロールユニット60は、上記原点Pを通り左右方向に延びる軸線を中心とした種々のモーメントに基づき、車両1が平衡状態にあるか否かを常時判断する。より正確には、車両1に作用する力およびモーメントのバランスから垂直抗力(反力)の作用点を算出し、この作用点が実際のクローラ30の接地面内に位置しているか否かによって判断する。
【0039】
車両1に働くモーメントは、下記の通りである。
M(W)・・・車両1の重量に起因する重力Wによって生じるモーメント。
M(B)・・・浮力Bによって生じるモーメント。
M(R)・・・車両1移動の際に車両1に働く流体抵抗Rによって生じるモーメント。
M(w)・・・マニピュレータ20で保持した物体の水中での荷重wに起因したモーメント。
M(T)・・・クローラ30による推進力Tに起因したモーメント。
M(N)・・・車両1が地面から受ける垂直抗力Nに起因したモーメント。
【0040】
ところで、x軸方向の力の釣り合いから、下記の式が成立する。
WsinΘ―BsinΘ+R−T+wsinΘ=0・・・(1)
この式(1)を書き直すと下記の通りである。
T=(W+w―B)sinΘ+R・・・(2)
【0041】
また、z方向の力の釣り合いから、下記式が成立する。
WcosΘ―BcosΘ−N+wcosΘ=0・・・(3)
この式(3)を書き直すと、下記の通りである。
N=(W+w−B)cosΘ ・・・(4)
【0042】
車両1の平衡状態は、上記モーメントの総和が0になることで得られ、これを式で表すと下記の通りである。
M(W)+M(w)+M(B)+M(R)+M(T)+M(N)=0・・・(5)
【0043】
以下、各モーメントを、車両1が傾斜角Θで傾斜した地面(水底面)を上りながら前進する場合について説明する。なお、時計周りのモーメントをプラスとし、反時計周りであるモーメントをマイナスとする。
【0044】
上記重力Wによって生じるモーメントは、下記の通りである。
M(W)=―W(xGcosΘ−zGsinΘ)・・・(6)
ただし、重心位置の座標は(xG,zG)で表される。W,xG,zGは既知の値である。Θは傾斜センサ64の検出角度により得られる。
【0045】
マニピュレータ20で保持された物体の荷重wに起因するモーメントM(w)は下記の通りである。
M(w)=−w(xwcosΘ−zwsinΘ) ・・・(7)
ただし、物体の重心位置の座標は(xw,zw)で表される。荷重wは荷重センサ65からの検出荷重により得られる。xw,zwは位置センサ66の検出位置により得られる。
なお、図7のように物体が原点Pの前方かつ上方に位置する場合には、xw,zwはマイナス値となるので、このモーメントM(w)は上記重力WのモーメントM(W)と逆方向になる。
【0046】
浮力BによるモーメントM(B)は下記の通りである。
M(B)=B(xBcosΘ−zBsinΘ)・・・(8)
ただし、浮心位置の座標は(xB,zB)で表される。B,xB,zBは既知の値である。
【0047】
流体抵抗Rによって生じるモーメントM(R)は下記の通りである。
M(R)=R・zR ・・・ (9)
なお、流体抵抗Rは速度センサ63での検出速度の関数(速度の2乗を含む)として求められる。流体抵抗Rは車両1の前面に働くが、そのみなし作用点は座標(0,zR)で表される。みなし作用点のz座標であるzRは、車両1の正面形状に対応した定数でもよいし、これに補正を加えるような速度の関数としてもよい。
【0048】
推進力Tによって生じるモーメントM(T)は下記の通りである。
M(T)=−T・zN ・・・ (10)
ただし、zNは地面でのz座標(クローラ30の接地面から原点Pまでの高さに相当する)であり、既知の数値である。
この式(10)に、上記式(2)を代入すると、下記式が得られる。
M(T)=―(W+w―B)zNsinΘ―R・zN ・・・ (11)
【0049】
垂直抗力Nによって生じるモーメントM(N)は下記の通りである。
M(N)=N・xN ・・・ (12)
ただし、垂直抗力Nの作用点(仮想作用点)のx座標であるxNは未知数である。
この式(12)に上記式(4)を代入すると下記式が得られる。
M(N)=(W+w−B)xNcosΘ・・・(13)
【0050】
上記式(6)〜(9),(11),(13)を平衡条件式(5)に代入すると、下記式が得られる。
―W(xGcosΘ−zGsinΘ)−w(xwcosΘ−zwsinΘ)+B(xBcosΘ−zBsinΘ)+R・zR―(W+w―B)zNsinΘ―R・zN+(W+w−B)xNcosΘ=0
・・・(14)
上記式(14)から、平衡条件(すなわち、通常走行可能条件)を満たすための未知のxNを求める式が得られる。
xN={W(xGcosΘ−zGsinΘ)+w(xwcosΘ−zwsinΘ)―B(xBcosΘ−zBsinΘ)+R(zN―zR)+(W+w―B)zNsinΘ}/(W+w−B)cosΘ
・・・(15)
【0051】
上記式(15)で求めた垂直抗力Nの仮想作用点xNが、前側クローラ30における最も前の接地点と、後側クローラ30における最も後の接地点との間にあれば、車両1は平衡状態(すなわち、通常走行可能条件を満たした状態)にある。
【0052】
コントロールユニット60は、前後のクローラ30が格納位置にあると仮定した時に車両1が平衡状態にあるか否かを判断する。すなわち、上記垂直抗力Nの仮想作用点xNが、格納位置にある前側クローラ30における最も前の接地点xF0と、格納位置にある後側クローラ30における最も後の接地点xA0との間にあるか否かを判断する。式で表すと下記の通りである。
xF0≦xN≦xA0 ・・・(16)
【0053】
コントロールユニット60は、上記式(16)を満足する場合には、前後のクローラ30が格納位置にある基本状態を維持する。
上記垂直抗力Nの作用点xNが、式(16)を満足せずxA0より後方に位置する場合、すなわち、xN>xA0の時には、後側のクローラ30を図7の想像線で示すように後方に回す。これにより、後側のクローラ30が展開位置となり、このクローラ30の最も後の接地点のx座標がxA0からxA’へと変わる。これにより、平衡条件(xN≦xA’)を満足することができる。
【0054】
上記垂直抗力Nの作用点xNが、式(16)を満足せずxF0より前方に位置する場合、すなわち、xN<xF0の時には、前側のクローラ30を図7の想像線で示すように前方に回す。これにより、前側のクローラ30が展開位置となり、このクローラ30の最も前の接地点のx座標がxF0からxF’へと変わる。これにより、平衡条件(xN≦xF’)を満足することができる。
【0055】
コントロールユニット60は可能な限り全てのクローラ30が格納位置にあるようにクローラ30を揺動制御する。すなわち、一旦クローラ30が展開されても、常時、格納位置でも平衡条件が成立するか否かを監視し、成立すると判断した時には展開位置から格納位置へとクローラ30を回す。これにより、本体10からのクローラ30の突出量をできるだけ抑えて調査の対象である水底の地層を乱さないで済む。
【0056】
車両1が傾斜した地面を下りながら前進する場合には、傾斜角度Θがマイナスの値をとるだけで、xNは式(15)によって求められる。
【0057】
車両1が図7に示す状態で傾斜した地面を左方向に移動する場合、すなわち、傾斜面を下がりながら後退する場合には、流体抵抗Rと推進力Tが逆向きになる。
x軸方向の力の釣り合いから、下記の式が成立する。
WsinΘ―BsinΘ―R+T+wsinΘ=0・・・(1’)
この式(1)を書き直すと下記の通りである。
T=(B−W―w)sinΘ+R・・・(2’)
【0058】
また、z方向の力の釣り合いから得られる式は、前述した傾斜地面を上りながら前進する場合と同様に下記式が成立する。
WcosΘ―BcosΘ−N+wcosΘ=0・・・(3)
この式(3)を書き直すと、下記の通りである。
N=(W+w−B)cosΘ ・・・(4)
【0059】
流体抵抗Rによって生じるモーメントM(R)は下記の通りである。
M(R)=―R・zR ・・・ (9’)
推進力Tによって生じるモーメントM(T)は下記の通りである。
M(T)=T・zN ・・・ (10’)
この式(10)に、上記式(2)を代入すると、下記式が得られる。
M(T)=(B―W―w)zNsinΘ+R・zN ・・・ (11’)
【0060】
上記式(9’)、(11’)を式(9)、(10)の代わりに式(5)に代入することにより、下記式が得られる。
xN={W(xGcosΘ−zGsinΘ)+w(xwcosΘ−zwsinΘ)―B(xBcosΘ−zBsinΘ)―R(zN―zR)+(W+w―B)zNsinΘ}/(W+w−B)cosΘ
・・・(15’)
xNを用いた制御は前述と同様であるから、説明を省略する。
【0061】
なお、車両1が上り傾斜した地面を後退する場合には、傾斜角度Θがマイナスの値をとるだけで、xNは式(15’)によって求められる。
【0062】
次に、図8に示すフローチャートを参照しながら、前後のクローラ30の揺動制御について説明する。
初期条件として、既知の数値W,B,xG,xB,zG,zB,zN,xA0,xF0,xA’,xF’ を予めコントロールユニット60に入力する(ステップ101)。また、同ステップにおいて流体抵抗Rを求めるための関数を入力し、流体抵抗Rのみなし作用点のz座標であるzRを求める関数または定数を入力する。これら初期条件の情報は初期条件記憶部61で記憶される。
【0063】
コントロールユニット60の演算部62では常時以下のルーチンを実行する。まず、車両1の状態を認識する(ステップ102)。すなわち、ポテンショメータ58からの情報により前後のクローラ位置(格納位置か展開位置か)を認識する。速度センサ63からの情報により、車両1の速度vを認識し、この速度vから流体抵抗Rと流体抵抗Rのみなし作用点のz座標であるzRを演算する。また、傾斜センサ64からの情報により、車両1の傾斜角度Θを認識する。さらに荷重センサ65および位置センサ66からの情報により、マニピュレータ20で保持している物体の荷重w、および位置(xw、zw)を認識する。
【0064】
次に、上記メモリに記憶された初期条件の情報とステップ101で得た情報を用い、上記式(15)または(15’)に基づき、平衡状態を維持するための垂直抗力Nの作用点のx座標であるxNを求める(ステップ103)。
【0065】
次に、前後のクローラ30の制御を並列処理で実行する。まず、前側のクローラ30の制御について説明する。
ステップ104で、平衡条件の一部を満足するか否か、すなわちxN≧xF0を満足するか否かを判断する。
【0066】
上記ステップ104で肯定判断した時には、前側のクローラ30を格納位置にする。すなわち、前側クローラ30が格納位置にあるか否かを判断し(ステップ105)、ここで格納位置にあると判断した場合にはその格納位置を維持し(ステップ106)、展開位置にあると判断した場合には前側クローラ30を回して格納位置にする(ステップ107)。
【0067】
上記ステップ104で否定判断した時、すなわち平衡条件xN≧xF0を満足しないと判断した時には、前側のクローラ30を展開位置にする。すなわち、前側クローラ30が展開位置にあるか否かを判断し(ステップ108)、ここで展開位置にあると判断した場合にはその展開位置を維持し(ステップ106)、格納位置にあると判断した場合には前側クローラ30を回して展開位置にする(ステップ109)。
【0068】
次に、後側のクローラ30の制御について説明する。
ステップ110で、平衡条件の一部を満足するか否か、すなわちxN≦xA0を満足するか否かを判断する。
上記ステップ110で肯定判断した時には、後側のクローラ30を格納位置にする。すなわち、後側クローラ30が格納位置にあるか否かを判断し(ステップ111)、ここで格納位置にあると判断した場合にはその格納位置を維持し(ステップ112)、展開位置にあると判断した場合には後側クローラ30を回して格納位置にする(ステップ113)。
【0069】
上記ステップ110で否定判断した時には、後側のクローラ30を展開位置にする。すなわち、後側クローラ30が展開位置にあるか否かを判断し(ステップ114)、ここで展開位置にあると判断した場合にはその展開位置を維持し(ステップ112)、格納位置にあると判断した場合には後側クローラ30を回して展開位置にする(ステップ115)。
【0070】
上記図8のルーチンでは、展開時のクローラ30の最前の接地点座標xF’および最も後の接地点座標xA’を制御に用いていないが、例えば展開した状態での平衡条件を満たすか否かの確認、すなわちxN≧xF’を満足するか否か、またはxN≦xA’を満足するか否かの確認のために用いてもよい。この平衡条件を満足できない場合には、警告を発したり、車両速度の調節を促したり、マニピュレータ20により物体の位置を変化させるようにしてもよい。
ちなみに、図8のルーチンでは、図2のように前後のクローラ30が同時に展開することは稀である。
【0071】
図8のルーチンにおいて、所定の余裕分αを見てクローラの展開を図ることもできる。この場合、ステップ104ではxN≧xF0+αか否かの判断がなされ、ステップ110ではxN≦xA0−αか否かの判断がなされる。
【0072】
次に、本発明の第2実施形態について、図9〜11を参照しながら説明する。この実施形態の車両1Aの本体は、第1実施形態の車両1の本体10と同様であるので、同番号を付してその詳細な説明を省略する。また、本体10に装備されるマニピュレータ、ライト、カメラ等は図示を省略する。
【0073】
第2実施形態の車両1Aは、スライド式クローラ70(走行部)を用いている点で、第1実施形態と異なる。なお、このクローラ70は形状が異なるものの第1実施形態のクローラ30と同様の構造を有しているので、その詳細な説明を省略する。各クローラ70には、駆動ホイールを回転駆動させてクローラベルトを回すためのモータユニット71(駆動機構)が連結されている。
【0074】
クローラ70をスライド可能に支持する機構80は、本体10のベース部11の下面に設けられた左右一対の前後方向に延びるリニアガイド81と、これらリニアガイド81により前後方向にスライド可能に支持された板形状の前後一対の移動体82とを有している。各移動体82には、左右一対のクローラ70と、これらクローラ70とモータユニット71が取り付けられている。
【0075】
前側の一対のクローラ70と後側の一対のクローラ70は、それぞれ移動機構90(移動手段)により独立して前後方向に移動される。この移動機構90は、モータユニット91と、このモータユニット91の回転トルクを移動体82の直線運動に変換する変換機構92とを有している。変換機構92は例えば移動体82に固定されて前後方向に延びるラック92aと、このラック92aに噛み合うピニオン(図示しない)とを有している。ピニオンは、直接に、またはギアやタイミングベルト機構等を介して間接的に、モータユニット91の出力軸に連結されている。
【0076】
各移動体72の位置ひいては各一対のクローラ70の位置は、モータユニット91に連結されたポテンショメータ等の位置センサにより検出されるようになっている。
図6における構成(ポテンショメータ58を除く)は、本実施形態でも用いられる。
【0077】
次に、第2実施形態のコントロールユニットで実行されるルーチンを図11を参照しながら説明する。図11において図8に対応するステップには同番号を付す。
ステップ101において入力される初期条件は第1実施形態と同様である。ただし、xA0は、後側のクローラ70が本体10の中心に最も近いスライド位置(以下、格納位置と称す)にある時の最も後の接地点のx座標である。また、xF0は、前側のクローラ70が本体10の中心に最も近いスライド位置(以下、格納位置と称す)にある時の最も前の接地点のx座標である。
【0078】
ステップ102での状態認識も第1実施形態と同様である。ただし、クローラ70の位置として、後側のクローラ70の最も後の接地点のx座標であるxAと、前側のクローラ70の最前の接地点のx座標であるxFが、上記位置センサからの検出情報により認識される。
【0079】
ステップ103,104,110は第1実施形態と同様である。
ステップ104で肯定判断した時には、ステップ120に進み、ここで前側クローラ70を格納位置にする。すなわち、前側のクローラ70が格納位置にある時(xF=xF0)にはその格納位置を維持し、前方へ突出している時(xF<xF0)には、格納位置までスライドさせる。
ステップ104で否定判断した時には、ステップ121に進み、ここで前クローラ70の最も前の接地点の座標xFが平衡条件で得られたxNになるように、前クローラ70をスライド制御する。この制御は、検出座標xFによるフィードバック制御である。
【0080】
同様に、ステップ110で肯定判断した時には、ステップ122に進み、ここで後側クローラ70を格納位置にする。すなわち、後側のクローラ70が格納位置にある時(xA=xA0)にはその格納位置を維持し、後方へ突出している時(xA>xA0)には、格納位置までスライドさせる。
ステップ110で否定判断した時には、ステップ123に進み、ここで後側クローラ70の最も後の接地点の座標xAが平衡条件で得られたxNになるように、後側クローラ70をスライド制御する。この制御は、検出座標xAによるフィードバック制御である。
【0081】
なお、上述した第2実施形態において、所定の余裕分をもって制御する場合には、ステップ121では、xF=xN−αとなるように制御し、ステップ123では、xA=xN+αとなるように制御する。なお、この場合、ステップ104で(xN≧xF0+α?)の判断を行い、ステップ110で(xN≦xA0−α?)の判断を行うのが好ましい。
【0082】
本発明は、上記実施例に制約されず、種々の態様を採用することができる。例えば、第1実施形態において、左右にメインクローラを備え、本発明の走行部としてフリッパ式の補助クローラを備えたものでもよい。
第2実施形態において、スライド式クローラを、格納位置と最大限に突出した展開位置の2つ位置を選択するように、スライド制御してもよい。
【0083】
第1、第2実施形態において、コントロールユニット60は、水流等の所定の条件に応じ、格納位置で平衡状態を維持できると判断した場合でも、クローラの展開位置または突出位置を維持するようにしてもよい。また、遠隔操作をコントロールユニット60による自動制御に優先させることにより、クローラの展開位置または突出位置を維持することもできる。
【0084】
コントロールユニット60は、式(15)または式(15’)で求めた垂直抗力の仮想作用点位置xNが、式(16)を満足するか否か(平衡条件を満足するか否か)を判断するだけでもよい。この場合、判断情報は前倒れまたは後倒れを警告する情報を含む。基地局ではこの判断情報(平衡性に関する情報)に基づいて、クローラの位置及び車両の速度を遠隔制御する。
【0085】
走行装置は、左右一対のクローラだけで構成してもよい。この場合、コントロールユニット60は、上記と同様に式(16)を満足するか否か(平衡条件を満足するか否か)を判断する。この場合、クローラの最も前の接地点位置、最も後の接地点位置が前述の式のxF0、xA0で表される。基地局ではこの判断情報に基づいて、車両の走行速度を制御することにより、前倒れ、後倒れを回避する。走行速度制御の代わりにコントローラユニット60の自動制御または基地局からの遠隔制御により、位置変更可能な重錘を用いた重心位置制御や、浮心位置制御を行ってもよい。
【産業上の利用可能性】
【0086】
本発明は、水中での探査や作業等に用いられる水中走行車両に適している。
【符号の説明】
【0087】
1、1A 水中走行車両
10 本体
30 フリッパ式クローラ(走行部)
50 移動機構(移動手段)
60 コントロールユニット
62 演算部(演算手段、プロセッサ)
63 速度センサ
64 傾斜センサ
65 荷重センサ
66 位置センサ
70 スライド式クローラ(走行部)
90 移動機構(移動手段)
【特許請求の範囲】
【請求項1】
本体と、この本体に設けられた走行手段とを備えた水中走行車両において、
さらに演算手段を備え、この演算手段は、車両に働く所定の原点回りのモーメントに基づき水中走行車両の平衡性に関する情報を得ることを特徴とする水中走行車両。
【請求項2】
上記車両に働く上記原点回りのモーメントが、車両重量に起因するモーメントと、車両に働く浮力に起因するモーメントと、車両の前後方向の移動に伴う流体抵抗に起因するモーメントと、車両の推進力に起因するモーメントと、車両が接地面から受ける垂直抗力によって生じるモーメントを含み、上記演算手段がこれらモーメントに基づき水中走行車両の平衡性に関する情報を得ることを特徴とする請求項1に記載の水中走行車両。
【請求項3】
さらに車両の前後方向の傾斜角度を検出する傾斜センサを備え、上記演算手段は、この傾斜角度と車両重量と車両重心位置とから、上記車両重量に起因するモーメントを演算するとともに、この傾斜角度と浮心と浮力に基づき、上記浮力に起因するモーメントを演算することを特徴とする請求項2に記載の水中走行車両。
【請求項4】
さらにマニピュレータと、このマニピュレータが保持する物体の荷重を検出する荷重センサと、物体の保持位置を検出する位置センサとを備え、
上記車両に働くモーメントが物体の荷重に起因したモーメントをも含み、上記演算手段は、この物体の荷重に起因したモーメントを、上記マニピュレータで保持した物体の検出位置および検出荷重と、上記傾斜センサで検出した傾斜角度から演算することを特徴とする請求項3に記載の水中走行車両。
【請求項5】
上記走行手段が前後の走行部を有し、
さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、
上記演算手段は、上記水中走行車両の平衡性に関する情報に基づき上記移動手段を介して、上記前後の走行部の位置を制御し、
車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を、前方へ移動させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を後方へ移動させることを特徴とする請求項1〜4に記載の水中走行車両。
【請求項6】
上記演算手段は、上記車両に働く複数のモーメントの総和がゼロとなる平衡条件が得られるような上記垂直抗力の仮想作用点の位置を演算し、当該仮想作用点の位置と、上記走行手段の最も前の接地点および最も後の接地点の位置との比較により、上記水中走行車両の平衡性に関する情報を得ることを特徴とする請求項2〜4のいずれかに記載の水中走行車両。
【請求項7】
上記走行手段が前後の走行部を有し、
さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、
上記演算手段は、上記垂直抗力の仮想作用点が、前側走行部の最も前の接地点と後側走行部の最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置するように、上記移動手段を介して、上記前後の走行部の位置を制御することを特徴とする請求項6に記載の水中走行車両。
【請求項8】
上記前後の走行部の各々は、左右一対のフリッパ式クローラからなり、各クローラは、一端が揺動可能に本体に支持され、他端が自由端となっており、選択的に接地される一対の直線部を含む無端条体を有し、
前後のクローラが格納位置にある時に、前後のクローラの自由端同士が互いに向き合うとともに、各無端条体の上記一対の直線部の一方が接地しており、
前側のクローラが格納位置から前方に回転することにより展開位置に至り、これにより、前側クローラの最も前の接地点が前方に変更されるとともに、各前側クローラにおいて上記無端条体の一対の直線部の他方が接地し、
後側のクローラが格納位置から後方に回転することにより展開位置に至り、これにより、後側クローラの最も後の接地点が後方に変更されるとともに、各後側クローラにおいて上記無端条体の一対の直線部の他方が接地し、
上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、
上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを展開位置に位置させ、
上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを展開位置に位置させることを特徴とする請求項7に記載の水中走行車両。
【請求項9】
上記前後の走行部の各々は、本体に前後方向にスライド可能に設けられた左右一対のスライド式クローラからなり、前側のクローラは本体の前後方向中心に最も近い格納位置から前方へ突出可能であり、後側のクローラは本体の前後方向中心に最も近い格納位置から後方へ突出可能であり、
上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、
上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを格納位置より前方に位置させ、
上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを格納位置より後方に位置させることを特徴とする請求項7に記載の水中走行車両。
【請求項10】
上記演算手段は、
前側クローラを格納位置より前方に位置させる場合に、前側クローラの最も前の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ前方に位置するように、前側クローラをスライド制御し、
後側クローラを格納位置より後方に位置させる場合に、後側クローラの最も後の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ後方に位置するように、後側クローラをスライド制御することを特徴とする請求項9に記載の水中走行車両。
【請求項11】
本体と、この本体の前後にそれぞれ設けられた走行部とを有し、これら前後の走行部の位置がそれぞれ前後方向に変更可能な水中走行車両の制御方法において、
車両に働くモーメントに基づき、前後の走行部が本体の前後方向中心に近い格納位置にあると想定した場合に水中走行車両が平衡状態か否かを判断する判断工程と、
平衡状態と判断した時には前後の走行部を上記格納位置に位置させ、車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を上記格納位置よりも前方に位置させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を上記格納位置より後方に位置させる走行部制御工程と、
を含むことを特徴とする水中走行車両の制御方法。
【請求項1】
本体と、この本体に設けられた走行手段とを備えた水中走行車両において、
さらに演算手段を備え、この演算手段は、車両に働く所定の原点回りのモーメントに基づき水中走行車両の平衡性に関する情報を得ることを特徴とする水中走行車両。
【請求項2】
上記車両に働く上記原点回りのモーメントが、車両重量に起因するモーメントと、車両に働く浮力に起因するモーメントと、車両の前後方向の移動に伴う流体抵抗に起因するモーメントと、車両の推進力に起因するモーメントと、車両が接地面から受ける垂直抗力によって生じるモーメントを含み、上記演算手段がこれらモーメントに基づき水中走行車両の平衡性に関する情報を得ることを特徴とする請求項1に記載の水中走行車両。
【請求項3】
さらに車両の前後方向の傾斜角度を検出する傾斜センサを備え、上記演算手段は、この傾斜角度と車両重量と車両重心位置とから、上記車両重量に起因するモーメントを演算するとともに、この傾斜角度と浮心と浮力に基づき、上記浮力に起因するモーメントを演算することを特徴とする請求項2に記載の水中走行車両。
【請求項4】
さらにマニピュレータと、このマニピュレータが保持する物体の荷重を検出する荷重センサと、物体の保持位置を検出する位置センサとを備え、
上記車両に働くモーメントが物体の荷重に起因したモーメントをも含み、上記演算手段は、この物体の荷重に起因したモーメントを、上記マニピュレータで保持した物体の検出位置および検出荷重と、上記傾斜センサで検出した傾斜角度から演算することを特徴とする請求項3に記載の水中走行車両。
【請求項5】
上記走行手段が前後の走行部を有し、
さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、
上記演算手段は、上記水中走行車両の平衡性に関する情報に基づき上記移動手段を介して、上記前後の走行部の位置を制御し、
車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を、前方へ移動させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を後方へ移動させることを特徴とする請求項1〜4に記載の水中走行車両。
【請求項6】
上記演算手段は、上記車両に働く複数のモーメントの総和がゼロとなる平衡条件が得られるような上記垂直抗力の仮想作用点の位置を演算し、当該仮想作用点の位置と、上記走行手段の最も前の接地点および最も後の接地点の位置との比較により、上記水中走行車両の平衡性に関する情報を得ることを特徴とする請求項2〜4のいずれかに記載の水中走行車両。
【請求項7】
上記走行手段が前後の走行部を有し、
さらに前後の走行部の位置をそれぞれ前後方向に変更する移動手段を備え、
上記演算手段は、上記垂直抗力の仮想作用点が、前側走行部の最も前の接地点と後側走行部の最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置するように、上記移動手段を介して、上記前後の走行部の位置を制御することを特徴とする請求項6に記載の水中走行車両。
【請求項8】
上記前後の走行部の各々は、左右一対のフリッパ式クローラからなり、各クローラは、一端が揺動可能に本体に支持され、他端が自由端となっており、選択的に接地される一対の直線部を含む無端条体を有し、
前後のクローラが格納位置にある時に、前後のクローラの自由端同士が互いに向き合うとともに、各無端条体の上記一対の直線部の一方が接地しており、
前側のクローラが格納位置から前方に回転することにより展開位置に至り、これにより、前側クローラの最も前の接地点が前方に変更されるとともに、各前側クローラにおいて上記無端条体の一対の直線部の他方が接地し、
後側のクローラが格納位置から後方に回転することにより展開位置に至り、これにより、後側クローラの最も後の接地点が後方に変更されるとともに、各後側クローラにおいて上記無端条体の一対の直線部の他方が接地し、
上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、
上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを展開位置に位置させ、
上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを展開位置に位置させることを特徴とする請求項7に記載の水中走行車両。
【請求項9】
上記前後の走行部の各々は、本体に前後方向にスライド可能に設けられた左右一対のスライド式クローラからなり、前側のクローラは本体の前後方向中心に最も近い格納位置から前方へ突出可能であり、後側のクローラは本体の前後方向中心に最も近い格納位置から後方へ突出可能であり、
上記演算手段は、上記垂直抗力の仮想作用点が、上記前後のクローラが格納位置にあると想定した時の最も前の接地点と最も後の接地点との間に位置するか、又は所定の余裕分を持って最も前の接地点と最も後の接地点との間に位置すると判断した場合には、前後のクローラを格納位置に位置させ、
上記仮想作用点が、前側のクローラが格納位置にあると想定した時の最も前の接地点または上記余裕分だけ後方の地点より前方に位置する場合には、前側のクローラを格納位置より前方に位置させ、
上記仮想作用点が、後側のクローラが格納位置にあると想定した時の最も後の接地点または上記余裕分だけ前方の地点より後方に位置する場合には、後側のクローラを格納位置より後方に位置させることを特徴とする請求項7に記載の水中走行車両。
【請求項10】
上記演算手段は、
前側クローラを格納位置より前方に位置させる場合に、前側クローラの最も前の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ前方に位置するように、前側クローラをスライド制御し、
後側クローラを格納位置より後方に位置させる場合に、後側クローラの最も後の接地点が、上記平衡条件を満たす垂直抗力の仮想作用点か、これより所定の余裕分だけ後方に位置するように、後側クローラをスライド制御することを特徴とする請求項9に記載の水中走行車両。
【請求項11】
本体と、この本体の前後にそれぞれ設けられた走行部とを有し、これら前後の走行部の位置がそれぞれ前後方向に変更可能な水中走行車両の制御方法において、
車両に働くモーメントに基づき、前後の走行部が本体の前後方向中心に近い格納位置にあると想定した場合に水中走行車両が平衡状態か否かを判断する判断工程と、
平衡状態と判断した時には前後の走行部を上記格納位置に位置させ、車両が前方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、前側の走行部を上記格納位置よりも前方に位置させ、後方へ倒れるかその恐れが高い非平衡状態にあると判断した時には、後側の走行部を上記格納位置より後方に位置させる走行部制御工程と、
を含むことを特徴とする水中走行車両の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−274669(P2010−274669A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−126012(P2009−126012)
【出願日】平成21年5月26日(2009.5.26)
【出願人】(504194878)独立行政法人海洋研究開発機構 (110)
【出願人】(504150450)国立大学法人神戸大学 (421)
【出願人】(390008338)広和株式会社 (21)
【出願人】(000110251)トピー工業株式会社 (255)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月26日(2009.5.26)
【出願人】(504194878)独立行政法人海洋研究開発機構 (110)
【出願人】(504150450)国立大学法人神戸大学 (421)
【出願人】(390008338)広和株式会社 (21)
【出願人】(000110251)トピー工業株式会社 (255)
【Fターム(参考)】
[ Back to top ]