
水田作業機
【課題】エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供する。
【解決手段】キースイッチ90がオン操作されている状態において、エンジン12の作動を停止させるエンジン自動停止処理、及び、エンジン12の作動を停止させたのちにエンジン12を始動させるエンジン自動始動処理を実行する制御装置Hが、エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
【解決手段】キースイッチ90がオン操作されている状態において、エンジン12の作動を停止させるエンジン自動停止処理、及び、エンジン12の作動を停止させたのちにエンジン12を始動させるエンジン自動始動処理を実行する制御装置Hが、エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンを搭載した走行機体に作業装置が連結され、前記走行機体に機体各部の作動を制御する制御手段が備えられ、前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機に関する。
【背景技術】
【0002】
上記水田作業機としての乗用型田植機において、従来では、特許文献1に記載される構成のものがあった。
すなわち、キースイッチがオン操作されている状態において、主変速レバーが走行停止状態をもたらす特定位置として設定されたエンジン停止位置に操作されたことが検知スイッチにて検出されると、制御装置が、そのとき苗残量センサが植付け用苗の残量が少なくなっており、畦際クラッチが切り操作されていることを検出すると、エンジン自動停止処理を実行するように構成され、そのエンジン自動停止処理にてエンジンの作動を停止させたのちに、主変速レバーがエンジン停止位置から外れて別の操作位置に操作されたことが検知スイッチにて検出されると、エンジン自動始動処理を実行するように構成されるものである。つまり、制御装置は、エンジン自動停止処理を実行してエンジンの作動を停止させたのちエンジン自動始動処理を実行するまでは、エンジン停止状態を維持する構成となっていた。
【0003】
上記構成は、圃場内で水田作業としての苗植付け作業を行なっているときに、例えば、苗植付け作業により消費された植付け苗を補給する作業を行うような場合に、エンジンを停止させるようにして燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるようにしたものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−94753号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来構成では、エンジン自動停止処理を実行してエンジンの作動を停止させたのちエンジン自動始動処理を実行するまでは、エンジン停止状態を維持する構成となっていることから次のような不利な面があり、改善の余地があった。
【0006】
すなわち、上記従来構成では、エンジン自動停止処理を実行してエンジンの作動を停止させる場合であっても、制御装置に対する電力供給状態は維持されており、制御装置にて電力が消費されるものとなっていた。又、制御装置だけではなく、制御装置によって作動が制御される他の機器においても電力が消費されることになる。
【0007】
ところで、上記したようなエンジン自動停止処理は、上述したように、植付け苗を補給する作業を行う等、一時的に作業を中断するような場合に、燃料の無駄な消費を抑制したり、騒音の低減を図るために、エンジンを停止させるものであり、そのようなエンジン停止状態はそれほど長く続くことは想定していないものであるが、例えば、植付け苗を補給する作業を行ったのち、作業者が、休憩や食事等のために、エンジン自動停止処理にてエンジンを停止させていることを忘れて、水田作業機から離れて長時間にわたりエンジン停止状態が継続することがある。
【0008】
このようにエンジン自動停止処理にてエンジンを停止させた状態が長時間継続すると、水田作業機に搭載されているバッテリーの電力が消費されてしまい、バッテリーの充電量がエンジンを始動させるのに必要な電力量を下回る程度にまで大幅に低下するおそれがある。そうすると、エンジンを始動させることができないので、その後の作業を継続して行うことができないものとなる不利がある。
【0009】
本発明の目的は、エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供する点にある。
【課題を解決するための手段】
【0010】
本発明に係る水田作業機は、エンジンを搭載した走行機体に作業装置が連結され、前記走行機体に機体各部の作動を制御する制御手段が備えられ、前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されているものであって、その第1特徴構成は、前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が設定時間以上継続すると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている点にある。
【0011】
第1特徴構成によれば、制御手段は、キースイッチがオン操作されている状態において、所定のエンジン停止条件が成立するとエンジン自動停止処理を実行して、エンジンの作動を停止させるが、制御手段は、エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持するので、エンジンが停止してから、例えば植付け苗を補給する作業等、エンジン停止状態で操作者にて行われる作業が終了して、エンジン自動始動処理を実行させるための操作が行われる場合には、制御手段に対する通電が行われているから、エンジン自動始動処理を良好に実行することができる。
【0012】
そして、制御手段は、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するから、それ以後は、バッテリーの電力消費が無い又は殆ど無いので、エンジンが停止していても、バッテリーの充電量がエンジンを始動させるのに必要な電力量を下回る程度にまで大幅に低下することを回避できる。
【0013】
従って、エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供できるに至った。
【0014】
本発明の第2特徴構成は、エンジンを搭載した走行機体に作業装置が連結され、前記走行機体に機体各部の作動を制御する制御手段が備えられ、前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機であって、前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が継続している状態において、前記バッテリーの充電量が設定値以下になると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている点にある。
【0015】
第2特徴構成によれば、制御手段は、キースイッチがオン操作されている状態において、所定のエンジン停止条件が成立するとエンジン自動停止処理を実行して、エンジンの作動を停止させるが、制御手段は、エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持するので、エンジンが停止してから、例えば植付け苗を補給する作業等、エンジン停止状態で操作者にて行われる作業が終了して、エンジン自動始動処理を実行させるための操作が行われる場合には、制御手段に対する通電が行われているから、エンジン自動始動処理を良好に実行することができる。
【0016】
そして、制御手段は、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が継続している状態において、前記バッテリーの充電量が設定値以下になると、バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するから、それ以後は、バッテリーの電力消費が無い又は殆ど無いので、エンジンが停止していても、バッテリーの充電量がエンジンを始動させるのに必要な電力量を下回る程度にまで大幅に低下することを回避できる。
【0017】
従って、エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供できるに至った。
【0018】
本発明の第3特徴構成は、第1特徴構成又は第2特徴構成に加えて、前記制御手段が、前記キースイッチ以外の操作具であり且つ異なる2つの操作具のうちのいずれか一方の操作具のエンジン停止用の操作に伴って、前記エンジン自動停止処理を実行し、前記2つの操作具のうちの他方の操作具のエンジン始動用の操作に伴って、前記エンジン自動始動処理を実行するように構成されている点にある。
【0019】
第3特徴構成によれば、キースイッチ以外の操作具であり且つ異なる2つの操作具のうちのいずれか一方の操作具のエンジン停止用の操作が行われると、それに伴ってエンジン自動停止処理が実行されてエンジンの作動が停止する。そして、エンジン自動停止処理にてエンジンの作動が停止したのちに、2つの操作具のうちの他方の操作具のエンジン始動用の操作が行われると、それに伴ってエンジン自動始動処理が実行されて、エンジンが始動することになる。
【0020】
このように、キースイッチ以外の操作具の操作に基づいて、エンジンを停止させたり、再始動させたりすることができるので、操作の煩わしさの少ない状態でエンジンを停止させるようにして、燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となる。
【0021】
例えば、1つの操作具で、エンジン自動停止処理の実行を指令する操作と、エンジン自動始動処理の実行を指令する操作とを夫々実行するような構成では、エンジン停止用の操作とエンジン始動用の操作という別々の操作を1つの操作具にて行なわなければならず、操作者が操作するにあたって紛らわしい場合があり、操作者の混乱を招くおそれがある。
【0022】
しかし、異なる2つの操作具のうちのいずれか一方の操作具の操作に伴ってエンジン自動停止処理を実行し、他方の操作具の操作に伴ってエンジン自動始動処理を実行するようにしたから、各操作を別々の操作具にて行うようにすることで、エンジン自動停止処理の実行を指令する操作、及び、エンジン自動始動処理の実行を指令する操作を、操作者の混乱を招くことのない状態で良好に行えるものとなる。
【0023】
従って、操作者に無用な混乱を生じさせることなく良好に、人為操作に基づいてエンジン自動停止処理及びエンジン自動始動処理を実行することが可能となる。
【0024】
本発明の第4特徴構成は、第1特徴構成〜第3特徴構成のいずれかに加えて、前記エンジン自動停止処理が実行されることにより前記エンジンが作動停止している状態であることを報知する報知手段が備えられている点にある。
【0025】
第4特徴構成によれば、操作者は、キースイッチをオフ操作することでエンジンが停止している通常のエンジン停止状態ではなく、エンジン自動停止処理が実行されることによりエンジンが作動停止していることを報知手段による報知作動により認識することができ、例えば、エンジン自動停止処理が実行されていることを忘れて水田作業機から長い時間離れる等の不利を回避し易いものとなる。
【0026】
本発明の第5特徴構成は、第4特徴構成に加えて、前記報知手段が、前記走行機体における操縦部の前方箇所に位置するセンターマスコットに内装された表示ランプである点にある。
【0027】
第5特徴構成によれば、センターマスコットは、走行機体における操縦部の前方箇所に位置する状態で、且つ、上下方向に延びる状態で設けられるものであり、そして、このようなセンターマスコットに内装された表示ランプにて報知するようにしたから、操作者が操縦部に位置している場合だけでなく、機外に出ている場合であっても、報知状態を目視にて確認することができ、エンジン自動停止処理が実行されることによりエンジンが作動停止していることを認識し易いものとなる。
【0028】
本発明の第6特徴構成は、第4特徴構成に加えて、前記報知手段が、警報音を発生するブザーである点にある。
【0029】
第6特徴構成によれば、ブザーが警報音を発生することによって報知するようにしたから、操作者が操縦部に位置している場合だけでなく、機外に出ている場合であっても、警報音によって報知状態を確認することができ、エンジン自動停止処理が実行されることによりエンジンが作動停止していることを認識し易いものとなる。
【0030】
本発明の第7特徴構成は、第1特徴構成〜第6特徴構成のいずれかに加えて、前記制御手段を、前記エンジン自動停止処理の実行を許容するエンジン自動停止可能モードと、前記エンジン自動停止処理の実行を禁止するエンジン自動停止不可モードとに切り換える手動操作式のモード切換手段が備えられ、前記エンジン自動停止可能モード及び前記エンジン自動停止不可モードのいずれのモードであるかを表示するモード表示手段が備えられている点にある。
【0031】
第7特徴構成によれば、モード切換手段にて制御手段をエンジン自動停止可能モードに切り換えておくと、所定のエンジン停止条件が成立するとエンジン自動停止処理を実行するが、モード切換手段にて制御手段をエンジン自動停止不可モードに切り換えておくと、所定のエンジン停止条件が成立してもエンジン自動停止処理を実行しないのである。
【0032】
そして、モード表示手段によって、エンジン自動停止可能モード及びエンジン自動停止不可モードのいずれのモードであるかを表示するので、操作者が、その表示内容に基づいて、例えば、作業状況の違いや操作者の熟練度の違い等に応じて適切な制御モードに切り換えておくことができる。
【0033】
つまり、操作者の判断により、エンジン自動停止処理を実行する状態と実行しない状態とを使え分けることができ、使い勝手のよいものとなる。
【図面の簡単な説明】
【0034】
【図1】乗用型田植機の全体側面図である。
【図2】乗用型田植機の全体平面図である。
【図3】動力系統図である。
【図4】動力系統図である。
【図5】主変速装置の操作構造を示す側面図である。
【図6】主変速装置の操作構造を示す平面図である。
【図7】主変速装置の操作構造を示す正面図である。
【図8】ガイド溝と位置保持機構を示す平面図である。
【図9】ガイド溝と位置保持機構を示す分解斜視図である。
【図10】主変速レバーとブレーキ操作との連係状態を示す側面図である。
【図11】主変速レバーとブレーキ操作との連係状態を示す側面図である。
【図12】主変速レバーとブレーキ操作との連係状態を示す側面図である。
【図13】制御ブロック図である。
【図14】電源供給状態を示す図である。
【図15】情報表示部の表示内容を示す図である。
【図16】制御動作のフローチャートである。
【図17】制御動作のフローチャートである。
【図18】制御動作のフローチャートである。
【図19】制御動作のフローチャートである。
【図20】第2実施形態の制御動作のフローチャートである。
【図21】別実施形態の電源供給状態を示す図である。
【発明を実施するための形態】
【0035】
〔第1実施形態〕
以下、本発明に係る水田作業機の第1実施形態を乗用型田植機に適用した場合について図面に基づいて説明する。
【0036】
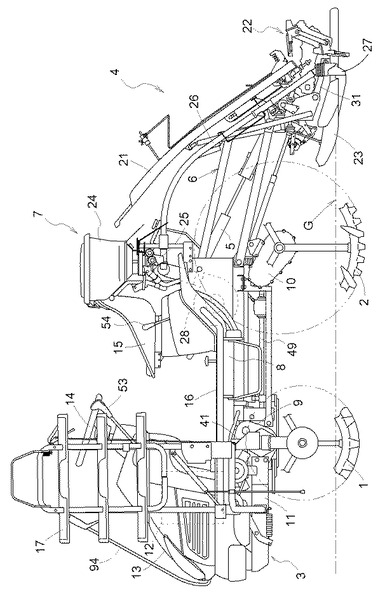
図1に示すように、本発明の実施形態に係る乗用型田植機は、左右一対の操向操作及び駆動自在な前輪1,1、及び左右一対の駆動自在な後輪2,2が装備された走行機体3を備え、この走行機体3の後部に作業装置としての苗植付装置4をアクチュエータとしての油圧シリンダ5にて駆動昇降自在にリンク機構6を介して連結してあり、走行機体3の車体後部に施肥装置7を備えて構成してある。
【0037】
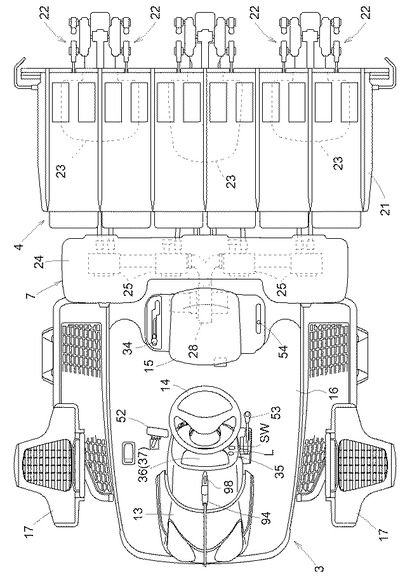
前記走行機体3における機体フレーム8の前部には、前輪1を軸支したミッションケース9が連結固定されるとともに、機体フレーム8の後部には、後輪2を軸支した後部伝動ケース10がローリング自在に支持されている。また、ミッションケース9から前方に延出された前フレーム11にエンジン12が横向きに搭載されてボンネット13で覆われているとともに、エンジン12の後方に位置する操縦部には、前輪1を操向操作するためのステアリングハンドル14、運転座席15、運転部ステップ16などが備えられ、また、機体前部の左右には、予備苗を複数段に載置収容する予備苗のせ台17が設けられている。
【0038】
苗植付装置4は、6条分の苗を載置して設定ストロークで往復横移動される苗のせ台21、苗のせ台21の下端から1株分ずつ苗を切り出して圃場に植付けてゆく6組の回転式の植付け機構22、植付け箇所を整地する3個の接地フロート23、等を備えて構成されている。
【0039】
施肥装置7は、運転座席15と苗植付装置4との間において走行機体3上に搭載されており、粉粒状の肥料を貯留する肥料ホッパー24、この肥料ホッパー24内の肥料を設定量づつ繰り出す繰出し機構25、繰り出された肥料を供給ホース26を介して各接地フロート23に備えた作溝器27に風力搬送する電動ブロア28、などを備えており、作溝器27によって田面Gに形成した溝に肥料を送り込んで埋設してゆくよう構成されている。
【0040】
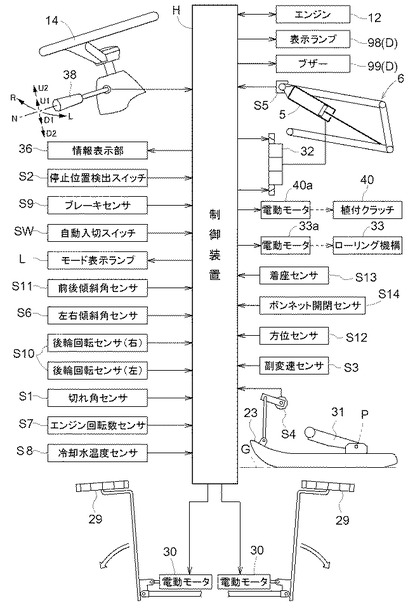
又、図1及び図2では図を判り易くするために省略しているが、図13に示すように、苗植付装置4の左右両側部には、次回の植え付け作業行程における中心線を田面Gに描くための回転式のマーカー29が電動モータ30の作動により外方に突出する作用姿勢と機体内方側に引退する引退姿勢とに切り換え自在に設けられている。
【0041】
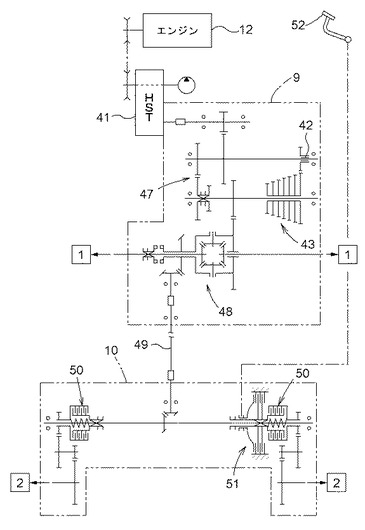
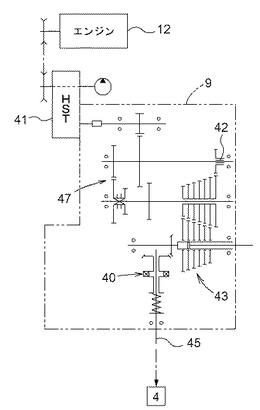
図3及び図4に示すように、ミッションケース9の側面には、エンジン12にベルト連動された静油圧式の無段変速装置(HST)からなる主変速装置41が連結され、その出力がミッションケース9に入力されて作業系と走行系とに分岐される。分岐された作業系の動力は、ワンウエイクラッチ42によってその正転動力のみが取出され、手動操作にて6段のギヤ変速が可能な株間変速機構43および電動モータ40aにて操作自在な植付クラッチ40を経て作業用動力取出し軸(PTO軸)45から取出され、苗植付装置4に伝達されるようになっている。
【0042】
分岐された走行系動力は、ギヤ式の副変速装置47によって高低2段に変速された後、前輪系と後輪系に再度分岐され、前輪系の動力はデフロック可能な差動装置48を介して左右の前輪1に伝達されるとともに、後輪系の動力は伝動軸49を介して後部伝動ケース10に伝達され、多板式のサイドクラッチ50を介して左右の後輪2に伝達される。後部伝動ケース10には機体停止用の多板式のブレーキ51が装備されており、このブレーキ51は、運転部ステップ16の右側足元に配備された足踏み操作式のブレーキ操作具52(他方の操作具の一例)に機械的に連動連結されている。
【0043】
主変速装置41は、ステアリングハンドル14の左脇に配備された主変速レバー53(一方の操作具の一例)で変速操作されるとともに、副変速装置47は、運転座席15の左横側に配備された副変速レバー54によって切換え操作されるようになっている。
【0044】
詳細な構造は図示されていないが、左右のサイドクラッチ50は前輪1の操向に連動して自動操作されるものであり、切れ角センサS1の検出値に基づいてステアリングハンドル14によって前輪1を左または右に設定角度(例えば30°)以上に操向されたことが検出されると、旋回内側となる後輪2のサイドクラッチ50が自動的に切り操作されて、円滑で小回りの利いた旋回が行われるように構成されている。
【0045】
次に、主変速装置41の変速操作構造について説明する。
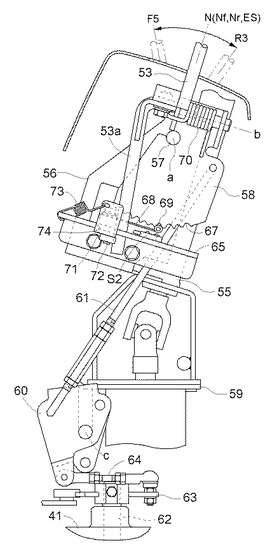
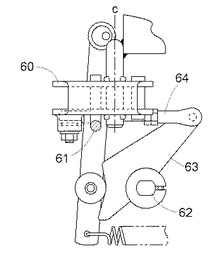
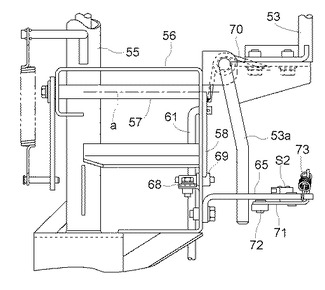
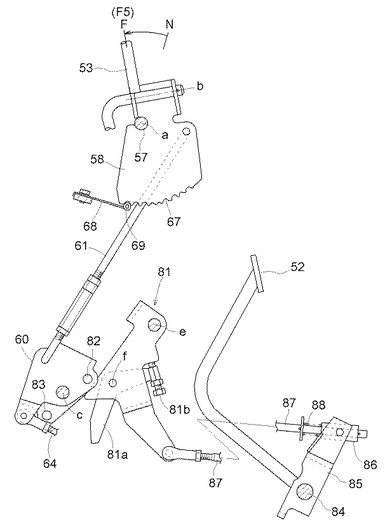
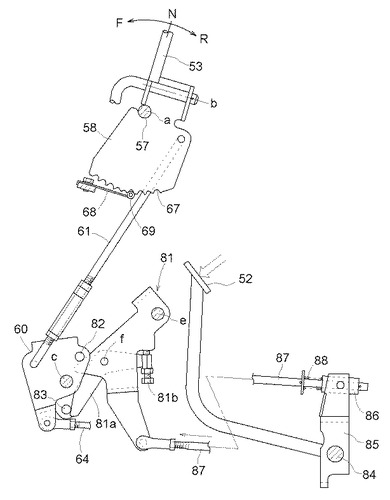
図5に示すように、ステアリングハンドル14を支持するよう立設されたハンドルポスト55には支持ブラケット56が固着され、この支持ブラケット56の左側端部には、支軸57を介してデテント板58が横向き支点a周りに前後揺動可能に支持され、このデテント板58に主変速レバー46が前後向き支点b周りに左右揺動可能に支持されている。ハンドルポスト55を立設支持する支持枠59に、横向き支点c周りに回動可能に中継回動部材60が支持されており、この中継回動部材60とデテント板58とが連係ロッド61を介して連係され、さらに、この中継回動部材60と、主変速装置41の変速操作軸62に連結された変速アーム63とが操作ロッド64を介して連係されている。
【0046】
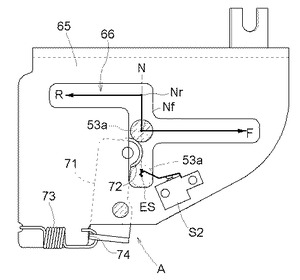
前記支持ブラケット56にはガイド板65が固着されるとともに、図8に示すように、このガイド板65に形成された段違い状の案内溝66に主変速レバー53の基部から下向きに延出された案内ロッド53aが貫通されており、案内溝66と案内ロッド53aとの係合案内作用によって主変速レバー53を所定の段違い操作径路に沿って前後に揺動操作することで、デテント板58を正逆に回動させて主変速装置41を前進域から後進域までの範囲で変速操作することが可能となっている。
【0047】
図8に示すように、段違い操作径路の段違い部位が主変速装置41の中立位置Nに相当し、前進側中立位置Nfの前方に前進変速操作径路Fが形成され、且つ、後進側中立位置Nrの後方に後進変操作径路Rが形成され、図5に示すように、デテント板58の外周に並列形成した9つの凹部67に、片持ちバネレバー68の遊端に支持したデテントローラ69を弾性係入させることで、主変速レバー53を前進5段(F1〜F5)、中立位置N、および、後進3段(R1〜R3)の各変速位置に保持することができるようになっている。
つまり、前進変速操作径路F、後進変操作径路R、及び、中立位置Nの夫々が、通常操作領域Zに対応するものである。
【0048】
また、主変速レバー53の横方向への操作の中心となる支点bには、ねじりバネ70が装備されており、主変速レバー53が常に支点b周りに揺動付勢されている。従って、主変速レバー53を中立位置Nに操作すると、後進側中立位置Nrから前進側中立位置Nf側に向けて付勢移動される。
【0049】
図8に示すように、前記案内溝66における前進側中立位置Nfの横外側にはエンジン停止用の特定位置としてエンジン停止位置ESが設定されるとともに、主変速レバー53の案内ロッド53aがこのエンジン停止位置ESに操作されたことを検知する停止位置検出スイッチS2がガイド板65に装備されている。
【0050】
そして、主変速レバー53がエンジン停止位置ESに操作されている状態で、その主変速レバー53を位置保持自在な位置保持手段Aが備えられている。
この位置保持手段Aは、主変速レバー53の通常操作領域Zとエンジン停止位置ESとの間での操作に移動抵抗を付与する弾性押圧式のデテント機構にて構成されている。
【0051】
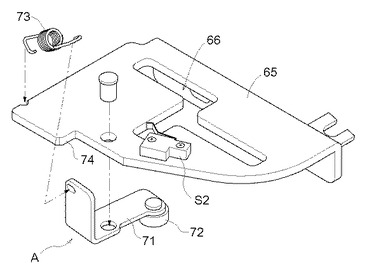
次に、このデテント機構からなる位置保持手段Aについて説明する。
図8及び図9に示すように、ガイド板65に備えられており、主変速レバー53が前進変速操作径路F又は後進変操作径路Rから中立位置Nに操作されたときに、ねじりバネ70の付勢力に抗してエンジン停止位置ESに移動することを牽制し、且つ、手動操作にてエンジン停止位置ESに操作することを許容するとともに、エンジン停止位置ESに操作されたのちは、主変速レバー53が前進側中立位置Nfに移動することを牽制する(主変速レバー53をエンジン停止位置ESに位置保持する)ように構成されている。
【0052】
説明を加えると、ガイド板65に上下軸芯周りで揺動自在に支持された揺動アーム71の一端部にローラ72が設けられ、他端部にローラ72を案内溝66の通過域(前進側中立位置Nfとエンジン停止位置ESとの間の操作経路)に入り込むように揺動付勢するコイルバネ73が設けられ、揺動アーム71は、コイルバネ73の付勢力に抗してガイド板65に形成した当たり部74に接当して所定位置で位置規制されている。
つまり、主変速レバー53をローラ72により受止めて、ねじりバネ70の付勢力に抗して位置保持可能で、且つ、主変速レバー53を手動で操作することによりローラ72が退避可能となるような位置で、揺動アーム71が停止するように構成されている。
【0053】
そのことにより、中立位置Nに操作された主変速レバー53を前進側中立位置Nfに位置保持して、エンジン停止位置ESに移動することを牽制することができ、手動操作にて主変速レバー53をエンジン停止位置ESに操作することを許容するとともに、エンジン停止位置ESに操作されたのちは、主変速レバー53が前進側中立位置Nfに移動することを牽制する(主変速レバー53をエンジン停止位置ESに位置保持する)ことができる。但し、手動操作にて主変速レバー53を操作することで、エンジン停止位置ESから前進側中立位置Nfに操作することは許容される。
【0054】
主変速レバー53をエンジン停止位置ESに操作すると、停止位置検出スイッチS2の操作部が操作されて停止位置検出スイッチS2がオン操作され、主変速レバー53を前進側中立位置Nfに操作すると停止位置検出スイッチS2がオフ操作される。
【0055】
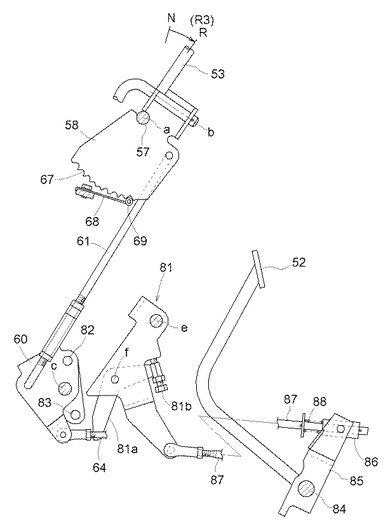
次に、図10〜図12を参照しながら、主変速レバー53とブレーキ操作具52との連係構造について説明する。
主変速レバー53が前進変速操作径路Fに操作されている前進走行状態、あるいは、後進変速操作径路Rに操作されている後進走行状態において、機体停止用のブレーキ操作具52が踏み込み操作されると、主変速レバー53が中立位置Nにまで強制的に復帰操作されるように、主変速レバー53とブレーキ操作具52とが連動連係されている。
【0056】
説明を加えると、図10に示すように、変速装置操作部の後方には、支点e周りに前後揺動可能に牽制作動部材81が配備されている。この牽制作動部材81にはアジャストボルト81bによって支点f周りに位置微調節可能な牽制金具81aが備えられており、牽制作動部材81の前縁部が、前記中継回動部材60の支点cより上方箇所に設けた第1接当ピン82に後方から対向するよう構成されるとともに、牽制金具81aの前縁部が、中継回動部材60の支点cより下方箇所に設けた第2接当ピン83に後方から対向するよう配備されている。
【0057】
他方、ブレーキ操作具52を連結したペダル支軸84の他端部には牽制操作アーム85が固着され、この牽制操作アーム85の遊端に回動自在に枢支したボス部材86に、前記牽制作動部材81の下端から後方に向けて延出された押し引きロッド87の後端部が挿通連結されている。ここで、押し引きロッド87は、ボス部材86に対して一定範囲でのみ前後にスライド自在に挿通支持されるとともに、予め初期圧縮変形して押し引きロッド87に外嵌装着した圧縮コイルバネ88によって押し引きロッド87はボス部材86に対して前方スライド限界にスライド付勢されている。
【0058】
図10は、ブレーキ操作具52が踏み込み操作されないで主変速レバー53が前進の最高速である前進5速F5にある状態を示し、また、図11は、ブレーキ操作具52が踏み込み操作されないで主変速レバー53が後進の最高速である後進3速R3にある状態を示している。
【0059】
主変速レバー53が前進変速操作径路Fにある状態(例えば図10の状態)でブレーキ操作具52が踏み込み操作されると、牽制操作アーム85が図中反時計方向に回動されることで押し引きロッド87が前方(図では左方)に突き出され、牽制作動部材81は支点e周りに時計方向に揺動操作される。これによって、図12に示すように、牽制作動部材81は第1接当ピン82を前方に接当押圧し、中継回動部材60は支点c周り反時計方向に強制回動され、主変速レバー53が中立位置N側に向けて戻される。
【0060】
主変速レバー53が中立位置Nに到ると、第2接当ピン83も牽制金具81aに接当することになり、支点cの上下両側に位置する第1接当ピン82および第2接当ピン83が共に牽制作動部材81に接当することで、中継回動部材60は、主変速レバー53が中立位置Nとなる一定姿勢に保持される。また、第1接当ピン82および第2接当ピン83に接当した牽制作動部材81自体も、それ以上時計周りに回動することが不能となる。なお、牽制作動部材81の牽制金具81aを位置調節することで、第1接当ピン82および第2接当ピン83を共に牽制作動部材81に接当させて中継回動部材60を正確に中立復帰させることができる。
【0061】
ここで、圧縮コイルバネ88によって与えられた初期圧縮力は、主変速レバー53を強制移動させるのに必要な操作力より大きく設定されており、主変速レバー53が中立位置Nに到るまでは、圧縮コイルバネ88は操作反力で圧縮変形されることはない。そして、主変速レバー53が中立位置Nに到った後、更にブレーキ操作具52が踏み込み操作されると、前方に移動不能となった押し引きロッド87に対して牽制操作アーム85が圧縮コイルバネ88を更に圧縮変形させながら図中反時計方向に回動されることで十分なブレーキ操作ストロ−クが確保される。
【0062】
また、主変速レバー53が後進変速操作径路Rにある状態(例えば図11の状態)でブレーキ操作具52を踏み込み操作すると、牽制操作アーム85が図中反時計方向に回動されることで押し引きロッド87が前方(図では左方)に突き出され、牽制作動部材81が支点e周りに時計方向に揺動操作される。これによって、牽制作動部材81の牽制金具81aは第2接当ピン83を前方に接当押圧し、中継回動部材60は支点c周り時計方向に強制回動され、主変速レバー53が中立位置N側に向けて戻される。そして、主変速レバー53が中立位置Nに到ると、第1接当ピン82も牽制動部材81の牽制金具81aに接当することになり、支点cの上下両側に位置する第1接当ピン81および第2接当ピン83が、牽制作動部材81に共に接当することで、中継回動部材60は主変速レバー53が中立位置Nとなる一定姿勢に保持される。
【0063】
この場合も、主変速レバー53が中立位置Nに到るまでは、圧縮コイルバネ88は操作反力で圧縮変形されることはなく、主変速レバー53が中立位置Nに到った後、更にブレーキ操作具52が踏み込み操作されることで、前方に移動不能となった押し引きロッド87に対して牽制操作アーム85が圧縮コイルバネ88を更に圧縮変形させながら図中反時計方向に回動される。
【0064】
前記副変速装置47は、水田作業用の変速状態としての植付け変速状態と、植付け変速状態よりも高速の他の変速状態としての路上走行用変速状態の2段階の切り換え自在に構成されるとともに、この副変速装置47は運転座席15の左脇に配備された副変速レバー54で操作されるように構成されている。
副変速レバー54は、植付け変速状態に対応する「植付位置」と路上走行用変速状態に対応する「路上走行位置」とに切り換え自在であり、この副変速レバー54が「植付位置」に操作されているか否かを検出する副変速センサS3が設けられている。
【0065】
次に、苗植付装置4について自動昇降制御を行うための構成について説明する。
図13に示すように、横軸芯P周りに左右中央の接地フロート23の後部が上下に揺動自在に支持アーム31に支持され、この接地フロート23の高さを検出するポテンショメータからなるフロートセンサS4が備えられており、機体の進行に伴って接地フロート23が田面Gに接地追従しながら、フロートセンサS4の検出値により苗植付装置4に対する中央の接地フロート23の高さ、言い換えると、田面Gからの苗植付装置4の高さを検出することができる。
【0066】
又、油圧シリンダ5に作動油を給排操作する制御弁32が備えられており、制御弁32により油圧シリンダ5に作動油が供給されると、油圧シリンダ5が収縮作動して苗植付装置4が上昇し、制御弁32により油圧シリンダ5から作動油が排出されると、油圧シリンダ5が伸長作動して苗植付装置4が下降するように構成されている。
【0067】
そして、フロートセンサS4の検出値がマイクロコンピュータを備えて構成される制御手段としての制御装置Hに入力され、制御装置Hは、フロートセンサS4の検出値が昇降用設定値に維持されるように、制御弁32を操作して油圧シリンダ5を伸縮作動させる。このことにより、苗植付装置4が田面Gから設定高さに維持されることになる。このような制御装置Hによる制御動作が自動昇降制御に相当する。
【0068】
尚、走行機体3に対するリンク機構6の昇降角度を検出するポテンショメータからなるリンク角センサS5が備えられて、リンク角センサS5の検出値が制御装置Hに入力されており、走行機体3に対するリンク機構6の角度を検出することにより、走行機体3に対する苗植付装置4の高さを検出することができるようになっている。
【0069】
苗植付装置4は前後軸芯周りにローリング自在にリンク機構6に支持されており、左右傾斜角センサS6が備えられ、水平面(田面G)に対する苗植付装置4の左右方向の傾斜角度が左右傾斜角センサS6(図13参照)によって検出されるように構成されている。又、詳述はしないが、リンク機構6の後上部に、走行機体3に対する苗植付装置4の左右傾斜姿勢を変更操作自在なローリング機構33が備えられ、このローリング機構33は、苗植付装置4の左右傾斜角を変更操作自在な電動モータ33aを備えて構成されている。
【0070】
制御装置Hは、左右傾斜センサS6により検出される水平面に対する苗植付装置4の左右方向の傾斜角度が設定傾斜角度になるように電動モータ33aを制御するよう構成されている。このことにより苗植付装置4が自動的に設定傾斜角度に維持されることになる。そして、このような制御装置Hによる制御動作が自動ローリング制御に相当する。
【0071】
運転座席15の前方に位置する前方パネル35の中央部には、液晶表示パネルを用いた情報表示部36が備えられている。詳述はしないが、情報表示部36には、例えば、苗のせ台21上に苗残量が少なくなったことやバッテリーVの電圧が低下していること等を表示したり、その他の種々の情報が表示される。
【0072】
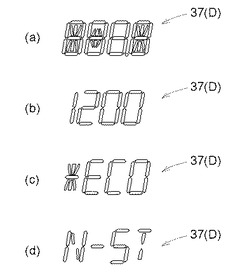
図15に示すように、情報表示部36には、累計稼動時間(アワーメータ)及びエンジン回転数を表示する4桁の数値表示部37が備えられている。そして、この数値表示部37は、アワーメータやエンジン回転数を表示するだけではなく、アルファベット及び*印等を表示することができるようになっており、後述するエンジン自動停止制御についての表示としても利用するようになっている。ちなみに、図15(a)は数値表示部37の全てのセグメントが点灯している全点灯状態を示し、図15(b)はアワーメータでの表示例を示している。図15(c),(d)は、後述するように、エンジン停止制御における表示例を示している。
【0073】
図13に示すように、ステアリングハンドル14の下側の右横側に作業状態切換用の操作レバー38が備えられ(図1や図2では省略している)、使用者はこの操作レバー38を操作することにより作業状態を切り換える構成となっている。操作レバー38は中立位置Nから上方の第1上昇位置U1、第2上昇位置U2、下方の第1下降位置D1、第2下降位置D2、後方の右マーカー位置R及び前方の左マーカー位置Lの十字方向に操作自在に構成されて、中立位置Nに復帰付勢されており、操作レバー38の操作位置が制御装置Hに入力されている。
【0074】
操作レバー38の指令に基づいて苗植付装置4の上昇操作や下降操作を指令したり、下降状態では自動昇降制御や自動ローリング制御を指令することができるように構成されている。
例えば、畦際で旋回走行するような場合に、操作レバー38が中立位置Nから一旦第2上昇位置U2に操作されると、植付クラッチ40を遮断状態に操作して、自動昇降制御及び自動ローリング制御を停止し、苗植付装置4を上昇させる。
旋回走行が終了して、操作レバー38を第2下降位置D2に操作すると(第2下降位置D2に操作して中立位置Nに復帰すると)、苗植付装置4を下降させ、中央の接地フロート23が田面Gに接地すると、自動昇降制御及び自動ローリング制御を開始して、苗植付装置4が田面Gに接地して停止した状態となる。
操作レバー38を第2下降位置D2に操作して中立位置Nに復帰した後、苗の植え付け開始位置まで走行したのち、操作レバー38を再び第2下降位置D2に操作すると、自動昇降制御及び自動ローリング制御が作動した状態で、植付クラッチ40を入り状態にして植付作業を実行する状態に切り換える。
【0075】
操作レバー38を右マーカー位置Rに操作すると(右マーカー位置Rに操作したのちに手を離して中立位置Nに復帰させると)、右のマーカー29が作用姿勢に操作され、操作レバー38を左マーカー位置Lに操作すると(左マーカー位置Lに操作したのちに手を離して中立位置Nに復帰させると)、左のマーカー29が作用姿勢に操作されるが、操作者は、植え付け作業において、次回の作業行程に対応する側のマーカー29を作用姿勢に操作することになる。
【0076】
そして、操作レバー38を第1上昇位置U1に操作すると、操作レバー38を第1上昇位置U1に維持している間は苗植付装置4を上昇させる。その後、操作者が手を離して操作レバー38が中立位置Nに復帰すると上昇を停止する。
【0077】
操作レバー38を第1下降位置D1に操作すると、操作レバー38を第1下降位置D1に維持している間は苗植付装置4を下降させる。その後、操作者が手を離して操作レバー38が中立位置Nに復帰すると下降を停止する。
【0078】
図13に示すように、停止位置検出スイッチS2、副変速センサS3、左右傾斜角センサS6の検出値が制御装置Hに入力されており、これ以外にも、ステアリングハンドル14の操作に伴う前輪1の切れ角を検出する切れ角センサS1、エンジン12の回転数を検出するエンジン回転数センサS7、エンジン12の冷却水の温度を検出する冷却水温度センサS8、運転部ステップ16に備えられたブレーキ操作具52が踏み込み操作されたことを検出するブレーキセンサS9、左右両側の後輪2の車軸の回転速度を検出する後輪回転センサS10、走行機体3の水平姿勢からの前後傾斜角を検出する前後傾斜角センサS11、走行機体の向きを検出する方位センサS12、運転座席15に運転者が着座しているか否かを検出する着座スイッチS13、ボンネット13が開放されているか否かを検出するボンネット開閉センサS14が備えられ、これらの情報も制御装置Hに入力されるように構成されている。尚、これ以外にもバッテリーVの電圧を検出する電圧検出手段(図示せず)が備えられる。
【0079】
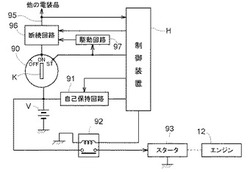
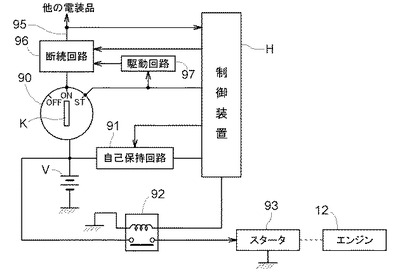
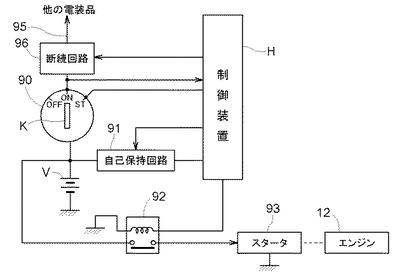
図14は、制御装置Hやその他の電装品への電源供給状態を示しており、この図に示すように、制御装置Hは、キーKにて操作されるキースイッチ90が電源入り位置(ON)に操作されると、バッテリーVの電源が投入されて起動される。
又、キースイッチ90が電源切り位置(OFF)に操作されても、直ちに電源の供給が停止されるのではなく、自己保持回路91によって電源供給が継続されるようになっており、キースイッチ90が電源切り位置(OFF)に操作されたときにおける各部の動作状態を図示しない不揮発性メモリに書き込み記憶させたのちに、自己保持回路91を遮断して電源供給を停止するように構成されている。また、キースイッチ90が始動位置(ST)に操作されたときには、バッテリーVとスタータ93との間の電源供給路に介装されたスターター起動用のリレー92をオン状態に切り換えてスターター93を作動させてエンジン12を始動させることになる。
【0080】
バッテリーVから制御装置Hを含む全ての電装品に対して電力を供給する主電源線95には、電力供給を断続自在な断続回路96が介装されており、この断続回路96は、制御装置Hからの指令によって電力供給状態と遮断状態とに切り換えることができるように構成され、さらに、キースイッチ90が始動位置(ST)に操作されたときに電力が供給されて作動する駆動回路97によっても電力供給状態と遮断状態とに切り換えることができるように構成されている。
【0081】
そして、制御装置Hは、キースイッチ90が電源入り位置(ON)に維持されている場合であっても、エンジン停止条件が成立するとエンジン12の作動を停止させるエンジン自動停止処理を実行するように構成されている。
又、制御装置Hを、前記エンジン自動停止処理の実行を許容するエンジン自動停止可能モードと、前記エンジン自動停止処理の実行を禁止するエンジン自動停止不可モードとに切り換える手動操作式のモード切換手段としての押し操作式の自動入切スイッチSWが備えられている。
制御装置Hがエンジン自動停止可能モード及びエンジン自動停止不可モードのいずれのモードであるかを表示するモード表示手段としてのモード表示ランプLが備えられている。
【0082】
自動入切スイッチSWをオン状態に切り換えると、制御装置Hがエンジン自動停止可能モードに切り換わり、自動入切スイッチSWをオフ状態に切り換えると、制御装置Hがエンジン自動停止不可モードに切り換わるように構成され、制御装置Hが、エンジン自動停止可能モードであればモード表示ランプLを点灯状態に切り換え、エンジン自動停止不可モードであればモード表示ランプLを消灯状態に切り換えるように構成されている。
【0083】
図2に示すように、前記自動入切スイッチSWと前記モード表示ランプLは、前方パネル35におけるステアリングハンドル14の左側箇所に前後に並ぶ状態で設けられている。
【0084】
エンジン自動停止処理は、圃場において苗植付け作業を行なっている場合に、例えば、苗植付け作業にて消費された植付け苗を補給する作業を行っている間など、エンジン12を停止させた状態で別の作業を行うときに、エンジン12を停止させることにより、燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるようにしたものである。
【0085】
前記エンジン停止条件としては、停止位置検出スイッチS2が設定時間(例えば数秒)以上にわたってオン操作されるという条件が設定されている。そして、制御装置Hは、牽制条件が成立していれば、エンジン停止条件が成立した場合であっても、エンジン自動停止制御を実行しないように構成されている。
【0086】
エンジン12を停止させるための構成について説明する。
図示はしていないが、制御装置Hとは別に、エンジン12に供給する燃料供給量を調整する調整手段(ガバナ)を電気的に制御するエンジン制御部が設けられているものであれば、制御装置Hからこのエンジン制御部にエンジン停止信号(具体的には、燃料供給を遮断するための信号)を出力することにより、エンジン12を停止させることができる。
又、エンジン12が点火プラグを備える構成であれば、制御装置Hが点火プラグに対する通電経路に備えられた断続器を遮断するように構成してもよい。
【0087】
そして、制御装置Hが、エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
【0088】
又、エンジン自動停止処理が実行されることによりエンジン12が作動停止している状態であることを報知する報知手段Dが備えられている。
すなわち、走行機体3における操縦部の前方に位置するボンネット13の前端部に、植付け作業を行うときの走行の目安となるセンターマスコット94が設けられ、このセンターマスコット94の先端部には表示ランプ98が内装されている。又、警報音を発生するブザー99も設けられており、これらの表示ランプ98及びブザー99が上記報知手段Dを構成している。又、情報表示部36における数値表示部37も上記報知手段Dを構成している。
【0089】
次に、自動入切スイッチSWにてエンジン自動停止可能モードが指令されている状態において制御装置Hが実行するエンジン自動停止制御について説明する。
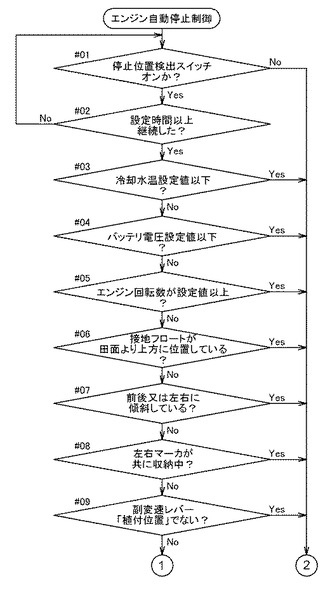
図16〜図18に示すように、主変速レバー53がエンジン停止位置ESに操作されて、停止位置検出スイッチS2がオン状態になり、その状態が設定時間以上継続すると、エンジン停止条件が成立する(ステップ1,2)。
【0090】
しかし、エンジン停止条件が成立しても、冷却水温度センサS8の検出値が設定温度以下であるという条件(ステップ3)、電圧検出手段の検出情報に基づいてバッテリーVの電圧が設定電圧以下であることが検出されるという条件(ステップ4)、エンジン回転数検出センサS7の検出情報に基づいてエンジン回転数が設定値よりも高くアイドリング状態でないということが検出されるという条件(ステップ5)、フロートセンサS4又はリンク角センサS5の検出情報に基づいて接地フロート23が田面Gよりも上方に位置していることが検出されるという条件(ステップ6)、前後傾斜角センサS11及び左右傾斜角センサS6の検出情報に基づいて走行機体3又は苗植付装置4が前後又は左右に水平姿勢から設定角度以上傾斜していることが検出されるという条件(ステップ7)、左右のマーカー29が共に収納状態になっているという条件(ステップ8)、副変速センサS3にて副変速レバー54が「植付位置」に操作されていないことが検出されるという条件(ステップ9)のうちの少なくともいずれかの条件が成立していると、エンジン12を停止させないようになっている。
【0091】
ステップ9における条件、副変速センサS3にて副変速レバー54が「植付位置」に操作されていないことが検出されるという条件は、言い換えると、副変速レバー54が「路上走行位置」に操作されているという条件である。このように副変速レバー54が「路上走行位置」に操作されているときに、エンジン12を停止させないようにしている。すなわち、路上走行時に坂道等でエンジン12が停止すると、機体が操作者の意思に反して坂道を移動する等の不利があるが、このような不利を防止することができるのである。
【0092】
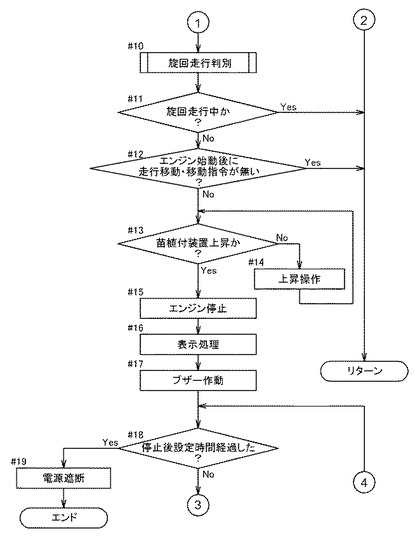
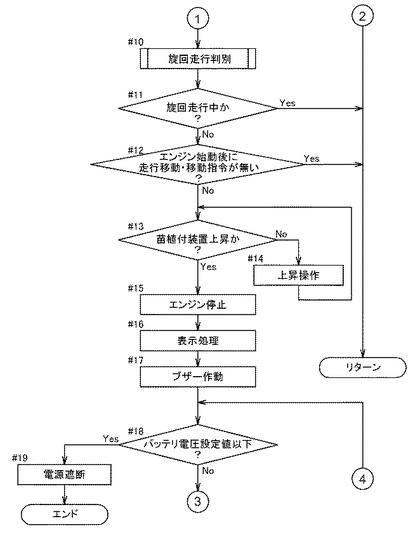
又、上記したようなステップ3〜9のいずれの条件も成立していない場合であっても、旋回走行判別処理を実行して旋回走行中であるという条件が成立すると、エンジン12を停止させないようになっている(ステップ10,11)。
【0093】
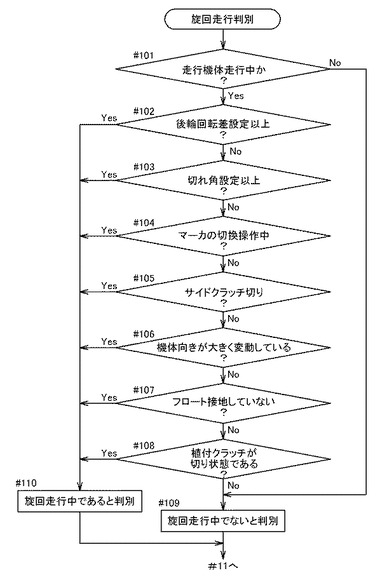
旋回走行判別処理について説明を加えると、図19に示すように、いずれかの後輪回転センサS10の検出値が零でなく、走行機体3が走行中であることが判別されている状態で(ステップ101)、左右の後輪回転センサS10の検出値の差が設定値以上であるという条件(ステップ102)、切れ角センサS1にて検出される前輪1の切れ角が設定値以上であるという条件(ステップ103)、左右のマーカー29のうちの作動するものを切り換え操作しているという条件(ステップ104)、左右いずれのサイドクラッチ50が切り操作されているという条件(ステップ105)、方位センサS12にて走行機体3の向きが大きく変動していることが検出されているという条件(ステップ106)、接地フロート23が田面Gに接地していないという条件(ステップ107)、植付クラッチ40がクラッチ切り状態に操作されているという条件(ステップ108)のうちのいずれかの条件が成立すると、旋回走行中であると判別し、いずれの条件も成立していなければ旋回走行中ではないと判別する(ステップ109,110)。
【0094】
又、前回にエンジン12が始動してから、その後において、後輪回転センサS10の検出値に基づいて走行機体3が走行移動していない、あるいは、走行移動すべく人為操作による指令も行われていないという条件が成立した場合にも、エンジン12を停止させないようになっている(ステップ12)。
【0095】
ステップ1,2のエンジン停止条件が成立しており、ステップ3〜12のいずれの条件も成立していなければ、苗植付装置4を設定位置の一例としての最大上昇位置にまで上昇させたのちに(ステップ13,14)、エンジン12を停止させるエンジン自動停止処理を実行する(ステップ15)。ちなみに、図示はしないが、ステップ1,2のエンジン停止条件が成立しており、ステップ3〜12のいずれの条件も成立していなければ、施肥装置7による施肥作業を実行している場合には、直ちに電動ブロア28を停止させるようになっている。
【0096】
エンジン自動停止処理を実行したことを表示するための表示処理を実行する(ステップ16)。すなわち、情報表示部36の表示内容をエンジン自動停止処理を実行することを表示するための表示に変更し、且つ、センターマスコット94の表示ランプ98を点滅表示させる。又、エンジン自動停止処理を実行したことを操作者に報知するためにブザーを間欠的に鳴動させる(ステップ17)。このとき、ブザーを長時間作動させると電力消費が大となるので、設定時間だけ作動するようにしている。
尚、ステップ16における情報表示部36の表示内容としては、例えば、図15(c)に示すように、数値表示部37を利用して「*ECO」という表示を行うようになっており、その「*ECO」という表示の表示形態としては、点滅表示させるようにしてもよく、あるいは、連続点灯させるようにしてもよい。
【0097】
このように、エンジン自動停止処理を実行したのちにおいても、制御装置Hや情報表示部36への電力供給が継続して行われるので、エンジン自動停止処理によってエンジン12が停止していることを操作者に報知することができる。
【0098】
制御装置Hは、エンジン自動停止処理を実行したのちにおいても、機体各部への電力供給を継続するようになっており、エンジン停止処理を実行してから設定時間が経過しても、後述するようなエンジン始動条件が成立しないときは、電源遮断処理を実行する(ステップ18,19)。つまり、設定時間だけブザーを連続で鳴動させて操作者にエンジン停止状態が長時間継続していることを警告したのちに、バッテリーVの放電を防ぐために、断続回路96に電力遮断状態への切り換えを指令して断続回路96を遮断させ、すべての電装品への電力供給を遮断させるのである。
【0099】
但し、この場合にも、キースイッチ90が電源切り位置(OFF)に操作される場合と同様に、直ちに制御装置Hへの電源の供給が停止されるのではなく、自己保持回路91によって電源供給が継続されるようになっており、断続回路96が遮断されたときにおける各部の動作状態を図示しない不揮発性メモリに書き込み記憶させたのちに、自己保持回路91を遮断して電源供給を停止するように構成されている。
【0100】
このように電力遮断状態に切り換えられたのちにおいて、エンジン12を始動させるためには、操作者がキースイッチ90を始動位置(ST)に操作することで対応できる。つまり、キースイッチ90が始動位置(ST)に操作されると、駆動回路97が作動して断続回路96を電力供給状態に切り換えるので、制御装置Hやその他の電装品にも電力が供給され、エンジン12の始動も行われることになる。
【0101】
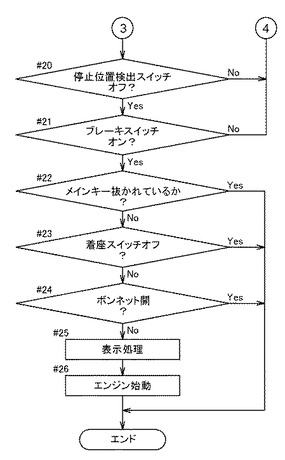
制御装置Hは、上記したような電源遮断処理が行われていない状態で、操作者が主変速レバー53をエンジン停止位置ESに移動させることにより停止位置検出スイッチS2がオフ状態に切り換わり、且つ、操作者がブレーキ操作具52を踏み込み操作することによりブレーキスイッチS9がオン状態に切り換わると(ステップ20,21)、エンジン始動条件が成立したものと判断する。
【0102】
但し、キースイッチ90からキーKが抜き外されているという条件(ステップ22)、運転座席15に設けられた着座スイッチS13がオフであるという条件(ステップ23)、ボンネット開閉センサS14の検出情報に基づいてボンネット13が開放されているという条件(ステップ24)の少なくともいずれか1つの条件が成立すると、エンジン12を始動させないようになっている。
【0103】
そして、エンジン始動条件が成立しており、ステップ23〜25の条件のいずれも成立していないときは、情報表示部36の表示内容をエンジン自動始動処理を実行することを表示するための表示に変更し、エンジン12を始動させるエンジン自動始動処理を実行する(ステップ25,26)。又、図示はしていないが、エンジン12を始動させると、施肥装置7による施肥作業を実行している場合には、その後すぐに電動ブロア28を作動状態に切り換えるようになっている。
このときの情報表示部36の表示内容としては、例えば、図15(d)に示すように、数値表示部37を利用して「N―ST」という表示を行うように構成されている。
【0104】
〔第2実施形態〕
以下、本発明に係る水田作業機の第2実施形態を乗用型田植機に適用した場合について図面に基づいて説明する。
この実施形態では、制御装置Hによる省電力状態に切り換えるための判別処理の構成以外の他の構成は第1実施形態と同じである。そこで、第1実施形態と異なる点についてのみ説明し、同じ構成については説明は省略する。
【0105】
この実施形態では、制御装置Hが、前記エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が継続している状態において、バッテリーVの充電量が設定値以下になると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
【0106】
つまり、図20に示すように、第1実施形態における図17で示される制御動作のうち、ステップ18の処理を、バッテリーVの充電量の一例としてのバッテリーVの電圧値が予め設定されている設定値以下にまで低下したか否かを判別する処理に変更するものである。
【0107】
そして、バッテリーVの電圧値が設定値以下にまで低下したことを判別すると、断続回路96に電力遮断状態への切り換えを指令して断続回路96を遮断させ、すべての電装品への電力供給を遮断させる(ステップ18,19)。
【0108】
バッテリーVの充電量として、バッテリーVの電圧値に代えて、制御装置H及び他の電力負荷に供給される電流値を計測して、その電流値が設定値よりも低下したか否かを判別する構成としてもよい。
【0109】
〔別実施形態〕
(1)上記実施形態では、制御装置Hが、電力供給状態切換処理として、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、又は、バッテリーVの電圧値が設定値以下にまで低下すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換えるようにしたが、このような構成に代えて、バッテリーVから機体各部への電力供給状態を電力消費が殆ど無い省電力状態に切り換えるようにしてもよい。
【0110】
すなわち、上記実施形態では、バッテリーVから制御装置Hを含む全ての電装品に対して電力を供給する主電源線95を遮断させるようにしたが、例えば、図21に示すように、断続回路96が、バッテリーVから制御装置Hを除く他の全ての電装品に対して電力を供給する主電源線95を遮断させるように構成され、キースイッチ90が電源入り位置(ON)に維持されている間は、制御装置Hに対する電力供給が継続するように構成されている。そして、この制御装置Hが、自己の判断によって、消費電力が非常に少ないスリープモードに切り換え可能な構成となっており、このスリープモードでは、起動指令があるまで演算処理や判断処理等の全ての処理を休止する極低消費電力状態(電力消費が殆ど無い省電力状態に対応)となる。
【0111】
つまり、制御装置Hは、上記実施形態の図17のステップ19の処理に代えて、自己をスリープモードに切り換えるのである。このようにスリープモードに切り換えたのちは、上記実施形態と同様に、キースイッチ90が始動位置(ST)に操作されると、制御装置Hが起動して断続回路96を電力供給状態に切り換え、他の電装品にも電力が供給され、エンジン12の始動も行われることになる。
【0112】
(2)上記実施形態では、報知手段Dとして、情報表示部36における数値表示部37、表示ランプ98、ブザー99を備える構成としたが、それらのうちのいずれか1つだけを備えるものや、それらのうちのいずれか2つを備えるものでもよく、別の構成の報知手段を用いてよい。
【0113】
(3)上記実施形態では、主変速レバー53がエンジン停止位置ESに操作されて、エンジン停止センサS2がオン状態になり、その状態が設定時間(例えば数秒間)以上継続すると、エンジン停止条件が成立する構成としたが、このような構成に代えて次のa〜eに記載した構成でもよく、又、その他の種々の条件を用いることができる。
【0114】
a.主変速レバー53とは別のエンジン停止専用又は他の操作を兼用する操作具(例えば、スイッチやレバー等)が操作されたこと。
b.ブレーキペダル52が踏み込み操作されたこと。
c.主変速レバー53が中立位置Nに操作されたこと。
d.走行停止状態で植付クラッチ40を遮断状態に操作すること。
e.走行停止状態で苗植付装置4を手動操作にて上昇位置にまで上昇させたこと。
f.主クラッチを備えるものであれば、主クラッチの切り操作が行われたこと。
【0115】
(4)上記実施形態では、図16及び図17のステップ3〜ステップ12の種々の条件のうちのいずれかが成立するとエンジン12を停止させないようにしたが、ステップ3〜ステップ12に示す全ての条件を夫々判別するものに代えて、それらのうちのいずれか1つ又は選択された2つ以上の条件を判別する構成としてもよい。
【0116】
例えば、エンジン停止条件が成立し且つエンジン冷却水の温度が設定温度を超えていればエンジン12を停止させる構成、エンジン停止条件が成立し且つバッテリーVの電圧が設定電圧を越えていればエンジン12を停止させる構成、エンジン停止条件が成立し且つ接地フロート23が田面Gに接地していればエンジン12を停止させる構成等、いずれか1つの牽制条件だけを判別する構成でもよい。又、複数の条件のうちの選択された2つ以上の牽制条件だけを判別する構成でもよい。
【0117】
(5)上記実施形態では、キースイッチ90からキーKが抜き外されているという条件、運転座席15に設けられた着座スイッチS13がオフであるという条件、ボンネット13が開放されているという条件の少なくともいずれかの条件が成立すると、エンジン12の始動を牽制するようにしたが、上記した3つの条件のうちのいずれか1つを判別するようにしたり、上記した3つの条件以外の他の条件を判別するようにしてもよく、又、このような牽制条件を判別しない構成としてもよい。
【0118】
(6)上記実施形態では、制御装置Hが、主変速レバー53のエンジン停止用の操作に伴って、苗植付装置4を最大上昇位置まで上昇させる昇降操作処理を実行したのちに、エンジン自動停止処理を実行するようにしたが、このような構成に代えて、昇降操作処理を実行することなく、苗植付装置4が田面Gに接地している状態でそのままエンジン12を停止させるようにしてもよい。又、昇降操作処理として、設定位置の一例である昇降範囲の途中位置にまで上昇させるようにしてもよく、設定位置を操縦者が苗補給作業が行い易い任意の高さに変更調整することができるようにしてもよい。
【0119】
(7)上記実施形態では、主変速レバー53のエンジン停止用の特定位置としてのエンジン停止位置ESが、中立位置Nのうちで前進側中立位置Nfに対して後進側中立位置Nrとは反対側に位置する状態で設定されたが、エンジン停止位置ESを、後進側中立位置Nrに対して前進側中立位置Nfとは反対側に位置する状態で設定するものでもよい。
【0120】
(8)上記実施形態では、水田作業機として乗用型田植機を例示したが、本発明は乗用型の直播機にも適用できる。
【産業上の利用可能性】
【0121】
本発明は、乗用型田植機や乗用型の直播機等の水田作業機に適用できる。
【符号の説明】
【0122】
3 走行機体
4 作業装置(苗植付装置)
12 エンジン
52 他方の操作具(ブレーキペダル)
53 一方の操作具(主変速レバー)
90 キースイッチ
98 表示ランプ
99 ブザー
D 報知手段
H 制御手段
L モード表示手段
SW モード切換手段
V バッテリー
【技術分野】
【0001】
本発明は、エンジンを搭載した走行機体に作業装置が連結され、前記走行機体に機体各部の作動を制御する制御手段が備えられ、前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機に関する。
【背景技術】
【0002】
上記水田作業機としての乗用型田植機において、従来では、特許文献1に記載される構成のものがあった。
すなわち、キースイッチがオン操作されている状態において、主変速レバーが走行停止状態をもたらす特定位置として設定されたエンジン停止位置に操作されたことが検知スイッチにて検出されると、制御装置が、そのとき苗残量センサが植付け用苗の残量が少なくなっており、畦際クラッチが切り操作されていることを検出すると、エンジン自動停止処理を実行するように構成され、そのエンジン自動停止処理にてエンジンの作動を停止させたのちに、主変速レバーがエンジン停止位置から外れて別の操作位置に操作されたことが検知スイッチにて検出されると、エンジン自動始動処理を実行するように構成されるものである。つまり、制御装置は、エンジン自動停止処理を実行してエンジンの作動を停止させたのちエンジン自動始動処理を実行するまでは、エンジン停止状態を維持する構成となっていた。
【0003】
上記構成は、圃場内で水田作業としての苗植付け作業を行なっているときに、例えば、苗植付け作業により消費された植付け苗を補給する作業を行うような場合に、エンジンを停止させるようにして燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるようにしたものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−94753号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来構成では、エンジン自動停止処理を実行してエンジンの作動を停止させたのちエンジン自動始動処理を実行するまでは、エンジン停止状態を維持する構成となっていることから次のような不利な面があり、改善の余地があった。
【0006】
すなわち、上記従来構成では、エンジン自動停止処理を実行してエンジンの作動を停止させる場合であっても、制御装置に対する電力供給状態は維持されており、制御装置にて電力が消費されるものとなっていた。又、制御装置だけではなく、制御装置によって作動が制御される他の機器においても電力が消費されることになる。
【0007】
ところで、上記したようなエンジン自動停止処理は、上述したように、植付け苗を補給する作業を行う等、一時的に作業を中断するような場合に、燃料の無駄な消費を抑制したり、騒音の低減を図るために、エンジンを停止させるものであり、そのようなエンジン停止状態はそれほど長く続くことは想定していないものであるが、例えば、植付け苗を補給する作業を行ったのち、作業者が、休憩や食事等のために、エンジン自動停止処理にてエンジンを停止させていることを忘れて、水田作業機から離れて長時間にわたりエンジン停止状態が継続することがある。
【0008】
このようにエンジン自動停止処理にてエンジンを停止させた状態が長時間継続すると、水田作業機に搭載されているバッテリーの電力が消費されてしまい、バッテリーの充電量がエンジンを始動させるのに必要な電力量を下回る程度にまで大幅に低下するおそれがある。そうすると、エンジンを始動させることができないので、その後の作業を継続して行うことができないものとなる不利がある。
【0009】
本発明の目的は、エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供する点にある。
【課題を解決するための手段】
【0010】
本発明に係る水田作業機は、エンジンを搭載した走行機体に作業装置が連結され、前記走行機体に機体各部の作動を制御する制御手段が備えられ、前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されているものであって、その第1特徴構成は、前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が設定時間以上継続すると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている点にある。
【0011】
第1特徴構成によれば、制御手段は、キースイッチがオン操作されている状態において、所定のエンジン停止条件が成立するとエンジン自動停止処理を実行して、エンジンの作動を停止させるが、制御手段は、エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持するので、エンジンが停止してから、例えば植付け苗を補給する作業等、エンジン停止状態で操作者にて行われる作業が終了して、エンジン自動始動処理を実行させるための操作が行われる場合には、制御手段に対する通電が行われているから、エンジン自動始動処理を良好に実行することができる。
【0012】
そして、制御手段は、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するから、それ以後は、バッテリーの電力消費が無い又は殆ど無いので、エンジンが停止していても、バッテリーの充電量がエンジンを始動させるのに必要な電力量を下回る程度にまで大幅に低下することを回避できる。
【0013】
従って、エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供できるに至った。
【0014】
本発明の第2特徴構成は、エンジンを搭載した走行機体に作業装置が連結され、前記走行機体に機体各部の作動を制御する制御手段が備えられ、前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機であって、前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が継続している状態において、前記バッテリーの充電量が設定値以下になると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている点にある。
【0015】
第2特徴構成によれば、制御手段は、キースイッチがオン操作されている状態において、所定のエンジン停止条件が成立するとエンジン自動停止処理を実行して、エンジンの作動を停止させるが、制御手段は、エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持するので、エンジンが停止してから、例えば植付け苗を補給する作業等、エンジン停止状態で操作者にて行われる作業が終了して、エンジン自動始動処理を実行させるための操作が行われる場合には、制御手段に対する通電が行われているから、エンジン自動始動処理を良好に実行することができる。
【0016】
そして、制御手段は、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が継続している状態において、前記バッテリーの充電量が設定値以下になると、バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するから、それ以後は、バッテリーの電力消費が無い又は殆ど無いので、エンジンが停止していても、バッテリーの充電量がエンジンを始動させるのに必要な電力量を下回る程度にまで大幅に低下することを回避できる。
【0017】
従って、エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供できるに至った。
【0018】
本発明の第3特徴構成は、第1特徴構成又は第2特徴構成に加えて、前記制御手段が、前記キースイッチ以外の操作具であり且つ異なる2つの操作具のうちのいずれか一方の操作具のエンジン停止用の操作に伴って、前記エンジン自動停止処理を実行し、前記2つの操作具のうちの他方の操作具のエンジン始動用の操作に伴って、前記エンジン自動始動処理を実行するように構成されている点にある。
【0019】
第3特徴構成によれば、キースイッチ以外の操作具であり且つ異なる2つの操作具のうちのいずれか一方の操作具のエンジン停止用の操作が行われると、それに伴ってエンジン自動停止処理が実行されてエンジンの作動が停止する。そして、エンジン自動停止処理にてエンジンの作動が停止したのちに、2つの操作具のうちの他方の操作具のエンジン始動用の操作が行われると、それに伴ってエンジン自動始動処理が実行されて、エンジンが始動することになる。
【0020】
このように、キースイッチ以外の操作具の操作に基づいて、エンジンを停止させたり、再始動させたりすることができるので、操作の煩わしさの少ない状態でエンジンを停止させるようにして、燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となる。
【0021】
例えば、1つの操作具で、エンジン自動停止処理の実行を指令する操作と、エンジン自動始動処理の実行を指令する操作とを夫々実行するような構成では、エンジン停止用の操作とエンジン始動用の操作という別々の操作を1つの操作具にて行なわなければならず、操作者が操作するにあたって紛らわしい場合があり、操作者の混乱を招くおそれがある。
【0022】
しかし、異なる2つの操作具のうちのいずれか一方の操作具の操作に伴ってエンジン自動停止処理を実行し、他方の操作具の操作に伴ってエンジン自動始動処理を実行するようにしたから、各操作を別々の操作具にて行うようにすることで、エンジン自動停止処理の実行を指令する操作、及び、エンジン自動始動処理の実行を指令する操作を、操作者の混乱を招くことのない状態で良好に行えるものとなる。
【0023】
従って、操作者に無用な混乱を生じさせることなく良好に、人為操作に基づいてエンジン自動停止処理及びエンジン自動始動処理を実行することが可能となる。
【0024】
本発明の第4特徴構成は、第1特徴構成〜第3特徴構成のいずれかに加えて、前記エンジン自動停止処理が実行されることにより前記エンジンが作動停止している状態であることを報知する報知手段が備えられている点にある。
【0025】
第4特徴構成によれば、操作者は、キースイッチをオフ操作することでエンジンが停止している通常のエンジン停止状態ではなく、エンジン自動停止処理が実行されることによりエンジンが作動停止していることを報知手段による報知作動により認識することができ、例えば、エンジン自動停止処理が実行されていることを忘れて水田作業機から長い時間離れる等の不利を回避し易いものとなる。
【0026】
本発明の第5特徴構成は、第4特徴構成に加えて、前記報知手段が、前記走行機体における操縦部の前方箇所に位置するセンターマスコットに内装された表示ランプである点にある。
【0027】
第5特徴構成によれば、センターマスコットは、走行機体における操縦部の前方箇所に位置する状態で、且つ、上下方向に延びる状態で設けられるものであり、そして、このようなセンターマスコットに内装された表示ランプにて報知するようにしたから、操作者が操縦部に位置している場合だけでなく、機外に出ている場合であっても、報知状態を目視にて確認することができ、エンジン自動停止処理が実行されることによりエンジンが作動停止していることを認識し易いものとなる。
【0028】
本発明の第6特徴構成は、第4特徴構成に加えて、前記報知手段が、警報音を発生するブザーである点にある。
【0029】
第6特徴構成によれば、ブザーが警報音を発生することによって報知するようにしたから、操作者が操縦部に位置している場合だけでなく、機外に出ている場合であっても、警報音によって報知状態を確認することができ、エンジン自動停止処理が実行されることによりエンジンが作動停止していることを認識し易いものとなる。
【0030】
本発明の第7特徴構成は、第1特徴構成〜第6特徴構成のいずれかに加えて、前記制御手段を、前記エンジン自動停止処理の実行を許容するエンジン自動停止可能モードと、前記エンジン自動停止処理の実行を禁止するエンジン自動停止不可モードとに切り換える手動操作式のモード切換手段が備えられ、前記エンジン自動停止可能モード及び前記エンジン自動停止不可モードのいずれのモードであるかを表示するモード表示手段が備えられている点にある。
【0031】
第7特徴構成によれば、モード切換手段にて制御手段をエンジン自動停止可能モードに切り換えておくと、所定のエンジン停止条件が成立するとエンジン自動停止処理を実行するが、モード切換手段にて制御手段をエンジン自動停止不可モードに切り換えておくと、所定のエンジン停止条件が成立してもエンジン自動停止処理を実行しないのである。
【0032】
そして、モード表示手段によって、エンジン自動停止可能モード及びエンジン自動停止不可モードのいずれのモードであるかを表示するので、操作者が、その表示内容に基づいて、例えば、作業状況の違いや操作者の熟練度の違い等に応じて適切な制御モードに切り換えておくことができる。
【0033】
つまり、操作者の判断により、エンジン自動停止処理を実行する状態と実行しない状態とを使え分けることができ、使い勝手のよいものとなる。
【図面の簡単な説明】
【0034】
【図1】乗用型田植機の全体側面図である。
【図2】乗用型田植機の全体平面図である。
【図3】動力系統図である。
【図4】動力系統図である。
【図5】主変速装置の操作構造を示す側面図である。
【図6】主変速装置の操作構造を示す平面図である。
【図7】主変速装置の操作構造を示す正面図である。
【図8】ガイド溝と位置保持機構を示す平面図である。
【図9】ガイド溝と位置保持機構を示す分解斜視図である。
【図10】主変速レバーとブレーキ操作との連係状態を示す側面図である。
【図11】主変速レバーとブレーキ操作との連係状態を示す側面図である。
【図12】主変速レバーとブレーキ操作との連係状態を示す側面図である。
【図13】制御ブロック図である。
【図14】電源供給状態を示す図である。
【図15】情報表示部の表示内容を示す図である。
【図16】制御動作のフローチャートである。
【図17】制御動作のフローチャートである。
【図18】制御動作のフローチャートである。
【図19】制御動作のフローチャートである。
【図20】第2実施形態の制御動作のフローチャートである。
【図21】別実施形態の電源供給状態を示す図である。
【発明を実施するための形態】
【0035】
〔第1実施形態〕
以下、本発明に係る水田作業機の第1実施形態を乗用型田植機に適用した場合について図面に基づいて説明する。
【0036】
図1に示すように、本発明の実施形態に係る乗用型田植機は、左右一対の操向操作及び駆動自在な前輪1,1、及び左右一対の駆動自在な後輪2,2が装備された走行機体3を備え、この走行機体3の後部に作業装置としての苗植付装置4をアクチュエータとしての油圧シリンダ5にて駆動昇降自在にリンク機構6を介して連結してあり、走行機体3の車体後部に施肥装置7を備えて構成してある。
【0037】
前記走行機体3における機体フレーム8の前部には、前輪1を軸支したミッションケース9が連結固定されるとともに、機体フレーム8の後部には、後輪2を軸支した後部伝動ケース10がローリング自在に支持されている。また、ミッションケース9から前方に延出された前フレーム11にエンジン12が横向きに搭載されてボンネット13で覆われているとともに、エンジン12の後方に位置する操縦部には、前輪1を操向操作するためのステアリングハンドル14、運転座席15、運転部ステップ16などが備えられ、また、機体前部の左右には、予備苗を複数段に載置収容する予備苗のせ台17が設けられている。
【0038】
苗植付装置4は、6条分の苗を載置して設定ストロークで往復横移動される苗のせ台21、苗のせ台21の下端から1株分ずつ苗を切り出して圃場に植付けてゆく6組の回転式の植付け機構22、植付け箇所を整地する3個の接地フロート23、等を備えて構成されている。
【0039】
施肥装置7は、運転座席15と苗植付装置4との間において走行機体3上に搭載されており、粉粒状の肥料を貯留する肥料ホッパー24、この肥料ホッパー24内の肥料を設定量づつ繰り出す繰出し機構25、繰り出された肥料を供給ホース26を介して各接地フロート23に備えた作溝器27に風力搬送する電動ブロア28、などを備えており、作溝器27によって田面Gに形成した溝に肥料を送り込んで埋設してゆくよう構成されている。
【0040】
又、図1及び図2では図を判り易くするために省略しているが、図13に示すように、苗植付装置4の左右両側部には、次回の植え付け作業行程における中心線を田面Gに描くための回転式のマーカー29が電動モータ30の作動により外方に突出する作用姿勢と機体内方側に引退する引退姿勢とに切り換え自在に設けられている。
【0041】
図3及び図4に示すように、ミッションケース9の側面には、エンジン12にベルト連動された静油圧式の無段変速装置(HST)からなる主変速装置41が連結され、その出力がミッションケース9に入力されて作業系と走行系とに分岐される。分岐された作業系の動力は、ワンウエイクラッチ42によってその正転動力のみが取出され、手動操作にて6段のギヤ変速が可能な株間変速機構43および電動モータ40aにて操作自在な植付クラッチ40を経て作業用動力取出し軸(PTO軸)45から取出され、苗植付装置4に伝達されるようになっている。
【0042】
分岐された走行系動力は、ギヤ式の副変速装置47によって高低2段に変速された後、前輪系と後輪系に再度分岐され、前輪系の動力はデフロック可能な差動装置48を介して左右の前輪1に伝達されるとともに、後輪系の動力は伝動軸49を介して後部伝動ケース10に伝達され、多板式のサイドクラッチ50を介して左右の後輪2に伝達される。後部伝動ケース10には機体停止用の多板式のブレーキ51が装備されており、このブレーキ51は、運転部ステップ16の右側足元に配備された足踏み操作式のブレーキ操作具52(他方の操作具の一例)に機械的に連動連結されている。
【0043】
主変速装置41は、ステアリングハンドル14の左脇に配備された主変速レバー53(一方の操作具の一例)で変速操作されるとともに、副変速装置47は、運転座席15の左横側に配備された副変速レバー54によって切換え操作されるようになっている。
【0044】
詳細な構造は図示されていないが、左右のサイドクラッチ50は前輪1の操向に連動して自動操作されるものであり、切れ角センサS1の検出値に基づいてステアリングハンドル14によって前輪1を左または右に設定角度(例えば30°)以上に操向されたことが検出されると、旋回内側となる後輪2のサイドクラッチ50が自動的に切り操作されて、円滑で小回りの利いた旋回が行われるように構成されている。
【0045】
次に、主変速装置41の変速操作構造について説明する。
図5に示すように、ステアリングハンドル14を支持するよう立設されたハンドルポスト55には支持ブラケット56が固着され、この支持ブラケット56の左側端部には、支軸57を介してデテント板58が横向き支点a周りに前後揺動可能に支持され、このデテント板58に主変速レバー46が前後向き支点b周りに左右揺動可能に支持されている。ハンドルポスト55を立設支持する支持枠59に、横向き支点c周りに回動可能に中継回動部材60が支持されており、この中継回動部材60とデテント板58とが連係ロッド61を介して連係され、さらに、この中継回動部材60と、主変速装置41の変速操作軸62に連結された変速アーム63とが操作ロッド64を介して連係されている。
【0046】
前記支持ブラケット56にはガイド板65が固着されるとともに、図8に示すように、このガイド板65に形成された段違い状の案内溝66に主変速レバー53の基部から下向きに延出された案内ロッド53aが貫通されており、案内溝66と案内ロッド53aとの係合案内作用によって主変速レバー53を所定の段違い操作径路に沿って前後に揺動操作することで、デテント板58を正逆に回動させて主変速装置41を前進域から後進域までの範囲で変速操作することが可能となっている。
【0047】
図8に示すように、段違い操作径路の段違い部位が主変速装置41の中立位置Nに相当し、前進側中立位置Nfの前方に前進変速操作径路Fが形成され、且つ、後進側中立位置Nrの後方に後進変操作径路Rが形成され、図5に示すように、デテント板58の外周に並列形成した9つの凹部67に、片持ちバネレバー68の遊端に支持したデテントローラ69を弾性係入させることで、主変速レバー53を前進5段(F1〜F5)、中立位置N、および、後進3段(R1〜R3)の各変速位置に保持することができるようになっている。
つまり、前進変速操作径路F、後進変操作径路R、及び、中立位置Nの夫々が、通常操作領域Zに対応するものである。
【0048】
また、主変速レバー53の横方向への操作の中心となる支点bには、ねじりバネ70が装備されており、主変速レバー53が常に支点b周りに揺動付勢されている。従って、主変速レバー53を中立位置Nに操作すると、後進側中立位置Nrから前進側中立位置Nf側に向けて付勢移動される。
【0049】
図8に示すように、前記案内溝66における前進側中立位置Nfの横外側にはエンジン停止用の特定位置としてエンジン停止位置ESが設定されるとともに、主変速レバー53の案内ロッド53aがこのエンジン停止位置ESに操作されたことを検知する停止位置検出スイッチS2がガイド板65に装備されている。
【0050】
そして、主変速レバー53がエンジン停止位置ESに操作されている状態で、その主変速レバー53を位置保持自在な位置保持手段Aが備えられている。
この位置保持手段Aは、主変速レバー53の通常操作領域Zとエンジン停止位置ESとの間での操作に移動抵抗を付与する弾性押圧式のデテント機構にて構成されている。
【0051】
次に、このデテント機構からなる位置保持手段Aについて説明する。
図8及び図9に示すように、ガイド板65に備えられており、主変速レバー53が前進変速操作径路F又は後進変操作径路Rから中立位置Nに操作されたときに、ねじりバネ70の付勢力に抗してエンジン停止位置ESに移動することを牽制し、且つ、手動操作にてエンジン停止位置ESに操作することを許容するとともに、エンジン停止位置ESに操作されたのちは、主変速レバー53が前進側中立位置Nfに移動することを牽制する(主変速レバー53をエンジン停止位置ESに位置保持する)ように構成されている。
【0052】
説明を加えると、ガイド板65に上下軸芯周りで揺動自在に支持された揺動アーム71の一端部にローラ72が設けられ、他端部にローラ72を案内溝66の通過域(前進側中立位置Nfとエンジン停止位置ESとの間の操作経路)に入り込むように揺動付勢するコイルバネ73が設けられ、揺動アーム71は、コイルバネ73の付勢力に抗してガイド板65に形成した当たり部74に接当して所定位置で位置規制されている。
つまり、主変速レバー53をローラ72により受止めて、ねじりバネ70の付勢力に抗して位置保持可能で、且つ、主変速レバー53を手動で操作することによりローラ72が退避可能となるような位置で、揺動アーム71が停止するように構成されている。
【0053】
そのことにより、中立位置Nに操作された主変速レバー53を前進側中立位置Nfに位置保持して、エンジン停止位置ESに移動することを牽制することができ、手動操作にて主変速レバー53をエンジン停止位置ESに操作することを許容するとともに、エンジン停止位置ESに操作されたのちは、主変速レバー53が前進側中立位置Nfに移動することを牽制する(主変速レバー53をエンジン停止位置ESに位置保持する)ことができる。但し、手動操作にて主変速レバー53を操作することで、エンジン停止位置ESから前進側中立位置Nfに操作することは許容される。
【0054】
主変速レバー53をエンジン停止位置ESに操作すると、停止位置検出スイッチS2の操作部が操作されて停止位置検出スイッチS2がオン操作され、主変速レバー53を前進側中立位置Nfに操作すると停止位置検出スイッチS2がオフ操作される。
【0055】
次に、図10〜図12を参照しながら、主変速レバー53とブレーキ操作具52との連係構造について説明する。
主変速レバー53が前進変速操作径路Fに操作されている前進走行状態、あるいは、後進変速操作径路Rに操作されている後進走行状態において、機体停止用のブレーキ操作具52が踏み込み操作されると、主変速レバー53が中立位置Nにまで強制的に復帰操作されるように、主変速レバー53とブレーキ操作具52とが連動連係されている。
【0056】
説明を加えると、図10に示すように、変速装置操作部の後方には、支点e周りに前後揺動可能に牽制作動部材81が配備されている。この牽制作動部材81にはアジャストボルト81bによって支点f周りに位置微調節可能な牽制金具81aが備えられており、牽制作動部材81の前縁部が、前記中継回動部材60の支点cより上方箇所に設けた第1接当ピン82に後方から対向するよう構成されるとともに、牽制金具81aの前縁部が、中継回動部材60の支点cより下方箇所に設けた第2接当ピン83に後方から対向するよう配備されている。
【0057】
他方、ブレーキ操作具52を連結したペダル支軸84の他端部には牽制操作アーム85が固着され、この牽制操作アーム85の遊端に回動自在に枢支したボス部材86に、前記牽制作動部材81の下端から後方に向けて延出された押し引きロッド87の後端部が挿通連結されている。ここで、押し引きロッド87は、ボス部材86に対して一定範囲でのみ前後にスライド自在に挿通支持されるとともに、予め初期圧縮変形して押し引きロッド87に外嵌装着した圧縮コイルバネ88によって押し引きロッド87はボス部材86に対して前方スライド限界にスライド付勢されている。
【0058】
図10は、ブレーキ操作具52が踏み込み操作されないで主変速レバー53が前進の最高速である前進5速F5にある状態を示し、また、図11は、ブレーキ操作具52が踏み込み操作されないで主変速レバー53が後進の最高速である後進3速R3にある状態を示している。
【0059】
主変速レバー53が前進変速操作径路Fにある状態(例えば図10の状態)でブレーキ操作具52が踏み込み操作されると、牽制操作アーム85が図中反時計方向に回動されることで押し引きロッド87が前方(図では左方)に突き出され、牽制作動部材81は支点e周りに時計方向に揺動操作される。これによって、図12に示すように、牽制作動部材81は第1接当ピン82を前方に接当押圧し、中継回動部材60は支点c周り反時計方向に強制回動され、主変速レバー53が中立位置N側に向けて戻される。
【0060】
主変速レバー53が中立位置Nに到ると、第2接当ピン83も牽制金具81aに接当することになり、支点cの上下両側に位置する第1接当ピン82および第2接当ピン83が共に牽制作動部材81に接当することで、中継回動部材60は、主変速レバー53が中立位置Nとなる一定姿勢に保持される。また、第1接当ピン82および第2接当ピン83に接当した牽制作動部材81自体も、それ以上時計周りに回動することが不能となる。なお、牽制作動部材81の牽制金具81aを位置調節することで、第1接当ピン82および第2接当ピン83を共に牽制作動部材81に接当させて中継回動部材60を正確に中立復帰させることができる。
【0061】
ここで、圧縮コイルバネ88によって与えられた初期圧縮力は、主変速レバー53を強制移動させるのに必要な操作力より大きく設定されており、主変速レバー53が中立位置Nに到るまでは、圧縮コイルバネ88は操作反力で圧縮変形されることはない。そして、主変速レバー53が中立位置Nに到った後、更にブレーキ操作具52が踏み込み操作されると、前方に移動不能となった押し引きロッド87に対して牽制操作アーム85が圧縮コイルバネ88を更に圧縮変形させながら図中反時計方向に回動されることで十分なブレーキ操作ストロ−クが確保される。
【0062】
また、主変速レバー53が後進変速操作径路Rにある状態(例えば図11の状態)でブレーキ操作具52を踏み込み操作すると、牽制操作アーム85が図中反時計方向に回動されることで押し引きロッド87が前方(図では左方)に突き出され、牽制作動部材81が支点e周りに時計方向に揺動操作される。これによって、牽制作動部材81の牽制金具81aは第2接当ピン83を前方に接当押圧し、中継回動部材60は支点c周り時計方向に強制回動され、主変速レバー53が中立位置N側に向けて戻される。そして、主変速レバー53が中立位置Nに到ると、第1接当ピン82も牽制動部材81の牽制金具81aに接当することになり、支点cの上下両側に位置する第1接当ピン81および第2接当ピン83が、牽制作動部材81に共に接当することで、中継回動部材60は主変速レバー53が中立位置Nとなる一定姿勢に保持される。
【0063】
この場合も、主変速レバー53が中立位置Nに到るまでは、圧縮コイルバネ88は操作反力で圧縮変形されることはなく、主変速レバー53が中立位置Nに到った後、更にブレーキ操作具52が踏み込み操作されることで、前方に移動不能となった押し引きロッド87に対して牽制操作アーム85が圧縮コイルバネ88を更に圧縮変形させながら図中反時計方向に回動される。
【0064】
前記副変速装置47は、水田作業用の変速状態としての植付け変速状態と、植付け変速状態よりも高速の他の変速状態としての路上走行用変速状態の2段階の切り換え自在に構成されるとともに、この副変速装置47は運転座席15の左脇に配備された副変速レバー54で操作されるように構成されている。
副変速レバー54は、植付け変速状態に対応する「植付位置」と路上走行用変速状態に対応する「路上走行位置」とに切り換え自在であり、この副変速レバー54が「植付位置」に操作されているか否かを検出する副変速センサS3が設けられている。
【0065】
次に、苗植付装置4について自動昇降制御を行うための構成について説明する。
図13に示すように、横軸芯P周りに左右中央の接地フロート23の後部が上下に揺動自在に支持アーム31に支持され、この接地フロート23の高さを検出するポテンショメータからなるフロートセンサS4が備えられており、機体の進行に伴って接地フロート23が田面Gに接地追従しながら、フロートセンサS4の検出値により苗植付装置4に対する中央の接地フロート23の高さ、言い換えると、田面Gからの苗植付装置4の高さを検出することができる。
【0066】
又、油圧シリンダ5に作動油を給排操作する制御弁32が備えられており、制御弁32により油圧シリンダ5に作動油が供給されると、油圧シリンダ5が収縮作動して苗植付装置4が上昇し、制御弁32により油圧シリンダ5から作動油が排出されると、油圧シリンダ5が伸長作動して苗植付装置4が下降するように構成されている。
【0067】
そして、フロートセンサS4の検出値がマイクロコンピュータを備えて構成される制御手段としての制御装置Hに入力され、制御装置Hは、フロートセンサS4の検出値が昇降用設定値に維持されるように、制御弁32を操作して油圧シリンダ5を伸縮作動させる。このことにより、苗植付装置4が田面Gから設定高さに維持されることになる。このような制御装置Hによる制御動作が自動昇降制御に相当する。
【0068】
尚、走行機体3に対するリンク機構6の昇降角度を検出するポテンショメータからなるリンク角センサS5が備えられて、リンク角センサS5の検出値が制御装置Hに入力されており、走行機体3に対するリンク機構6の角度を検出することにより、走行機体3に対する苗植付装置4の高さを検出することができるようになっている。
【0069】
苗植付装置4は前後軸芯周りにローリング自在にリンク機構6に支持されており、左右傾斜角センサS6が備えられ、水平面(田面G)に対する苗植付装置4の左右方向の傾斜角度が左右傾斜角センサS6(図13参照)によって検出されるように構成されている。又、詳述はしないが、リンク機構6の後上部に、走行機体3に対する苗植付装置4の左右傾斜姿勢を変更操作自在なローリング機構33が備えられ、このローリング機構33は、苗植付装置4の左右傾斜角を変更操作自在な電動モータ33aを備えて構成されている。
【0070】
制御装置Hは、左右傾斜センサS6により検出される水平面に対する苗植付装置4の左右方向の傾斜角度が設定傾斜角度になるように電動モータ33aを制御するよう構成されている。このことにより苗植付装置4が自動的に設定傾斜角度に維持されることになる。そして、このような制御装置Hによる制御動作が自動ローリング制御に相当する。
【0071】
運転座席15の前方に位置する前方パネル35の中央部には、液晶表示パネルを用いた情報表示部36が備えられている。詳述はしないが、情報表示部36には、例えば、苗のせ台21上に苗残量が少なくなったことやバッテリーVの電圧が低下していること等を表示したり、その他の種々の情報が表示される。
【0072】
図15に示すように、情報表示部36には、累計稼動時間(アワーメータ)及びエンジン回転数を表示する4桁の数値表示部37が備えられている。そして、この数値表示部37は、アワーメータやエンジン回転数を表示するだけではなく、アルファベット及び*印等を表示することができるようになっており、後述するエンジン自動停止制御についての表示としても利用するようになっている。ちなみに、図15(a)は数値表示部37の全てのセグメントが点灯している全点灯状態を示し、図15(b)はアワーメータでの表示例を示している。図15(c),(d)は、後述するように、エンジン停止制御における表示例を示している。
【0073】
図13に示すように、ステアリングハンドル14の下側の右横側に作業状態切換用の操作レバー38が備えられ(図1や図2では省略している)、使用者はこの操作レバー38を操作することにより作業状態を切り換える構成となっている。操作レバー38は中立位置Nから上方の第1上昇位置U1、第2上昇位置U2、下方の第1下降位置D1、第2下降位置D2、後方の右マーカー位置R及び前方の左マーカー位置Lの十字方向に操作自在に構成されて、中立位置Nに復帰付勢されており、操作レバー38の操作位置が制御装置Hに入力されている。
【0074】
操作レバー38の指令に基づいて苗植付装置4の上昇操作や下降操作を指令したり、下降状態では自動昇降制御や自動ローリング制御を指令することができるように構成されている。
例えば、畦際で旋回走行するような場合に、操作レバー38が中立位置Nから一旦第2上昇位置U2に操作されると、植付クラッチ40を遮断状態に操作して、自動昇降制御及び自動ローリング制御を停止し、苗植付装置4を上昇させる。
旋回走行が終了して、操作レバー38を第2下降位置D2に操作すると(第2下降位置D2に操作して中立位置Nに復帰すると)、苗植付装置4を下降させ、中央の接地フロート23が田面Gに接地すると、自動昇降制御及び自動ローリング制御を開始して、苗植付装置4が田面Gに接地して停止した状態となる。
操作レバー38を第2下降位置D2に操作して中立位置Nに復帰した後、苗の植え付け開始位置まで走行したのち、操作レバー38を再び第2下降位置D2に操作すると、自動昇降制御及び自動ローリング制御が作動した状態で、植付クラッチ40を入り状態にして植付作業を実行する状態に切り換える。
【0075】
操作レバー38を右マーカー位置Rに操作すると(右マーカー位置Rに操作したのちに手を離して中立位置Nに復帰させると)、右のマーカー29が作用姿勢に操作され、操作レバー38を左マーカー位置Lに操作すると(左マーカー位置Lに操作したのちに手を離して中立位置Nに復帰させると)、左のマーカー29が作用姿勢に操作されるが、操作者は、植え付け作業において、次回の作業行程に対応する側のマーカー29を作用姿勢に操作することになる。
【0076】
そして、操作レバー38を第1上昇位置U1に操作すると、操作レバー38を第1上昇位置U1に維持している間は苗植付装置4を上昇させる。その後、操作者が手を離して操作レバー38が中立位置Nに復帰すると上昇を停止する。
【0077】
操作レバー38を第1下降位置D1に操作すると、操作レバー38を第1下降位置D1に維持している間は苗植付装置4を下降させる。その後、操作者が手を離して操作レバー38が中立位置Nに復帰すると下降を停止する。
【0078】
図13に示すように、停止位置検出スイッチS2、副変速センサS3、左右傾斜角センサS6の検出値が制御装置Hに入力されており、これ以外にも、ステアリングハンドル14の操作に伴う前輪1の切れ角を検出する切れ角センサS1、エンジン12の回転数を検出するエンジン回転数センサS7、エンジン12の冷却水の温度を検出する冷却水温度センサS8、運転部ステップ16に備えられたブレーキ操作具52が踏み込み操作されたことを検出するブレーキセンサS9、左右両側の後輪2の車軸の回転速度を検出する後輪回転センサS10、走行機体3の水平姿勢からの前後傾斜角を検出する前後傾斜角センサS11、走行機体の向きを検出する方位センサS12、運転座席15に運転者が着座しているか否かを検出する着座スイッチS13、ボンネット13が開放されているか否かを検出するボンネット開閉センサS14が備えられ、これらの情報も制御装置Hに入力されるように構成されている。尚、これ以外にもバッテリーVの電圧を検出する電圧検出手段(図示せず)が備えられる。
【0079】
図14は、制御装置Hやその他の電装品への電源供給状態を示しており、この図に示すように、制御装置Hは、キーKにて操作されるキースイッチ90が電源入り位置(ON)に操作されると、バッテリーVの電源が投入されて起動される。
又、キースイッチ90が電源切り位置(OFF)に操作されても、直ちに電源の供給が停止されるのではなく、自己保持回路91によって電源供給が継続されるようになっており、キースイッチ90が電源切り位置(OFF)に操作されたときにおける各部の動作状態を図示しない不揮発性メモリに書き込み記憶させたのちに、自己保持回路91を遮断して電源供給を停止するように構成されている。また、キースイッチ90が始動位置(ST)に操作されたときには、バッテリーVとスタータ93との間の電源供給路に介装されたスターター起動用のリレー92をオン状態に切り換えてスターター93を作動させてエンジン12を始動させることになる。
【0080】
バッテリーVから制御装置Hを含む全ての電装品に対して電力を供給する主電源線95には、電力供給を断続自在な断続回路96が介装されており、この断続回路96は、制御装置Hからの指令によって電力供給状態と遮断状態とに切り換えることができるように構成され、さらに、キースイッチ90が始動位置(ST)に操作されたときに電力が供給されて作動する駆動回路97によっても電力供給状態と遮断状態とに切り換えることができるように構成されている。
【0081】
そして、制御装置Hは、キースイッチ90が電源入り位置(ON)に維持されている場合であっても、エンジン停止条件が成立するとエンジン12の作動を停止させるエンジン自動停止処理を実行するように構成されている。
又、制御装置Hを、前記エンジン自動停止処理の実行を許容するエンジン自動停止可能モードと、前記エンジン自動停止処理の実行を禁止するエンジン自動停止不可モードとに切り換える手動操作式のモード切換手段としての押し操作式の自動入切スイッチSWが備えられている。
制御装置Hがエンジン自動停止可能モード及びエンジン自動停止不可モードのいずれのモードであるかを表示するモード表示手段としてのモード表示ランプLが備えられている。
【0082】
自動入切スイッチSWをオン状態に切り換えると、制御装置Hがエンジン自動停止可能モードに切り換わり、自動入切スイッチSWをオフ状態に切り換えると、制御装置Hがエンジン自動停止不可モードに切り換わるように構成され、制御装置Hが、エンジン自動停止可能モードであればモード表示ランプLを点灯状態に切り換え、エンジン自動停止不可モードであればモード表示ランプLを消灯状態に切り換えるように構成されている。
【0083】
図2に示すように、前記自動入切スイッチSWと前記モード表示ランプLは、前方パネル35におけるステアリングハンドル14の左側箇所に前後に並ぶ状態で設けられている。
【0084】
エンジン自動停止処理は、圃場において苗植付け作業を行なっている場合に、例えば、苗植付け作業にて消費された植付け苗を補給する作業を行っている間など、エンジン12を停止させた状態で別の作業を行うときに、エンジン12を停止させることにより、燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるようにしたものである。
【0085】
前記エンジン停止条件としては、停止位置検出スイッチS2が設定時間(例えば数秒)以上にわたってオン操作されるという条件が設定されている。そして、制御装置Hは、牽制条件が成立していれば、エンジン停止条件が成立した場合であっても、エンジン自動停止制御を実行しないように構成されている。
【0086】
エンジン12を停止させるための構成について説明する。
図示はしていないが、制御装置Hとは別に、エンジン12に供給する燃料供給量を調整する調整手段(ガバナ)を電気的に制御するエンジン制御部が設けられているものであれば、制御装置Hからこのエンジン制御部にエンジン停止信号(具体的には、燃料供給を遮断するための信号)を出力することにより、エンジン12を停止させることができる。
又、エンジン12が点火プラグを備える構成であれば、制御装置Hが点火プラグに対する通電経路に備えられた断続器を遮断するように構成してもよい。
【0087】
そして、制御装置Hが、エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
【0088】
又、エンジン自動停止処理が実行されることによりエンジン12が作動停止している状態であることを報知する報知手段Dが備えられている。
すなわち、走行機体3における操縦部の前方に位置するボンネット13の前端部に、植付け作業を行うときの走行の目安となるセンターマスコット94が設けられ、このセンターマスコット94の先端部には表示ランプ98が内装されている。又、警報音を発生するブザー99も設けられており、これらの表示ランプ98及びブザー99が上記報知手段Dを構成している。又、情報表示部36における数値表示部37も上記報知手段Dを構成している。
【0089】
次に、自動入切スイッチSWにてエンジン自動停止可能モードが指令されている状態において制御装置Hが実行するエンジン自動停止制御について説明する。
図16〜図18に示すように、主変速レバー53がエンジン停止位置ESに操作されて、停止位置検出スイッチS2がオン状態になり、その状態が設定時間以上継続すると、エンジン停止条件が成立する(ステップ1,2)。
【0090】
しかし、エンジン停止条件が成立しても、冷却水温度センサS8の検出値が設定温度以下であるという条件(ステップ3)、電圧検出手段の検出情報に基づいてバッテリーVの電圧が設定電圧以下であることが検出されるという条件(ステップ4)、エンジン回転数検出センサS7の検出情報に基づいてエンジン回転数が設定値よりも高くアイドリング状態でないということが検出されるという条件(ステップ5)、フロートセンサS4又はリンク角センサS5の検出情報に基づいて接地フロート23が田面Gよりも上方に位置していることが検出されるという条件(ステップ6)、前後傾斜角センサS11及び左右傾斜角センサS6の検出情報に基づいて走行機体3又は苗植付装置4が前後又は左右に水平姿勢から設定角度以上傾斜していることが検出されるという条件(ステップ7)、左右のマーカー29が共に収納状態になっているという条件(ステップ8)、副変速センサS3にて副変速レバー54が「植付位置」に操作されていないことが検出されるという条件(ステップ9)のうちの少なくともいずれかの条件が成立していると、エンジン12を停止させないようになっている。
【0091】
ステップ9における条件、副変速センサS3にて副変速レバー54が「植付位置」に操作されていないことが検出されるという条件は、言い換えると、副変速レバー54が「路上走行位置」に操作されているという条件である。このように副変速レバー54が「路上走行位置」に操作されているときに、エンジン12を停止させないようにしている。すなわち、路上走行時に坂道等でエンジン12が停止すると、機体が操作者の意思に反して坂道を移動する等の不利があるが、このような不利を防止することができるのである。
【0092】
又、上記したようなステップ3〜9のいずれの条件も成立していない場合であっても、旋回走行判別処理を実行して旋回走行中であるという条件が成立すると、エンジン12を停止させないようになっている(ステップ10,11)。
【0093】
旋回走行判別処理について説明を加えると、図19に示すように、いずれかの後輪回転センサS10の検出値が零でなく、走行機体3が走行中であることが判別されている状態で(ステップ101)、左右の後輪回転センサS10の検出値の差が設定値以上であるという条件(ステップ102)、切れ角センサS1にて検出される前輪1の切れ角が設定値以上であるという条件(ステップ103)、左右のマーカー29のうちの作動するものを切り換え操作しているという条件(ステップ104)、左右いずれのサイドクラッチ50が切り操作されているという条件(ステップ105)、方位センサS12にて走行機体3の向きが大きく変動していることが検出されているという条件(ステップ106)、接地フロート23が田面Gに接地していないという条件(ステップ107)、植付クラッチ40がクラッチ切り状態に操作されているという条件(ステップ108)のうちのいずれかの条件が成立すると、旋回走行中であると判別し、いずれの条件も成立していなければ旋回走行中ではないと判別する(ステップ109,110)。
【0094】
又、前回にエンジン12が始動してから、その後において、後輪回転センサS10の検出値に基づいて走行機体3が走行移動していない、あるいは、走行移動すべく人為操作による指令も行われていないという条件が成立した場合にも、エンジン12を停止させないようになっている(ステップ12)。
【0095】
ステップ1,2のエンジン停止条件が成立しており、ステップ3〜12のいずれの条件も成立していなければ、苗植付装置4を設定位置の一例としての最大上昇位置にまで上昇させたのちに(ステップ13,14)、エンジン12を停止させるエンジン自動停止処理を実行する(ステップ15)。ちなみに、図示はしないが、ステップ1,2のエンジン停止条件が成立しており、ステップ3〜12のいずれの条件も成立していなければ、施肥装置7による施肥作業を実行している場合には、直ちに電動ブロア28を停止させるようになっている。
【0096】
エンジン自動停止処理を実行したことを表示するための表示処理を実行する(ステップ16)。すなわち、情報表示部36の表示内容をエンジン自動停止処理を実行することを表示するための表示に変更し、且つ、センターマスコット94の表示ランプ98を点滅表示させる。又、エンジン自動停止処理を実行したことを操作者に報知するためにブザーを間欠的に鳴動させる(ステップ17)。このとき、ブザーを長時間作動させると電力消費が大となるので、設定時間だけ作動するようにしている。
尚、ステップ16における情報表示部36の表示内容としては、例えば、図15(c)に示すように、数値表示部37を利用して「*ECO」という表示を行うようになっており、その「*ECO」という表示の表示形態としては、点滅表示させるようにしてもよく、あるいは、連続点灯させるようにしてもよい。
【0097】
このように、エンジン自動停止処理を実行したのちにおいても、制御装置Hや情報表示部36への電力供給が継続して行われるので、エンジン自動停止処理によってエンジン12が停止していることを操作者に報知することができる。
【0098】
制御装置Hは、エンジン自動停止処理を実行したのちにおいても、機体各部への電力供給を継続するようになっており、エンジン停止処理を実行してから設定時間が経過しても、後述するようなエンジン始動条件が成立しないときは、電源遮断処理を実行する(ステップ18,19)。つまり、設定時間だけブザーを連続で鳴動させて操作者にエンジン停止状態が長時間継続していることを警告したのちに、バッテリーVの放電を防ぐために、断続回路96に電力遮断状態への切り換えを指令して断続回路96を遮断させ、すべての電装品への電力供給を遮断させるのである。
【0099】
但し、この場合にも、キースイッチ90が電源切り位置(OFF)に操作される場合と同様に、直ちに制御装置Hへの電源の供給が停止されるのではなく、自己保持回路91によって電源供給が継続されるようになっており、断続回路96が遮断されたときにおける各部の動作状態を図示しない不揮発性メモリに書き込み記憶させたのちに、自己保持回路91を遮断して電源供給を停止するように構成されている。
【0100】
このように電力遮断状態に切り換えられたのちにおいて、エンジン12を始動させるためには、操作者がキースイッチ90を始動位置(ST)に操作することで対応できる。つまり、キースイッチ90が始動位置(ST)に操作されると、駆動回路97が作動して断続回路96を電力供給状態に切り換えるので、制御装置Hやその他の電装品にも電力が供給され、エンジン12の始動も行われることになる。
【0101】
制御装置Hは、上記したような電源遮断処理が行われていない状態で、操作者が主変速レバー53をエンジン停止位置ESに移動させることにより停止位置検出スイッチS2がオフ状態に切り換わり、且つ、操作者がブレーキ操作具52を踏み込み操作することによりブレーキスイッチS9がオン状態に切り換わると(ステップ20,21)、エンジン始動条件が成立したものと判断する。
【0102】
但し、キースイッチ90からキーKが抜き外されているという条件(ステップ22)、運転座席15に設けられた着座スイッチS13がオフであるという条件(ステップ23)、ボンネット開閉センサS14の検出情報に基づいてボンネット13が開放されているという条件(ステップ24)の少なくともいずれか1つの条件が成立すると、エンジン12を始動させないようになっている。
【0103】
そして、エンジン始動条件が成立しており、ステップ23〜25の条件のいずれも成立していないときは、情報表示部36の表示内容をエンジン自動始動処理を実行することを表示するための表示に変更し、エンジン12を始動させるエンジン自動始動処理を実行する(ステップ25,26)。又、図示はしていないが、エンジン12を始動させると、施肥装置7による施肥作業を実行している場合には、その後すぐに電動ブロア28を作動状態に切り換えるようになっている。
このときの情報表示部36の表示内容としては、例えば、図15(d)に示すように、数値表示部37を利用して「N―ST」という表示を行うように構成されている。
【0104】
〔第2実施形態〕
以下、本発明に係る水田作業機の第2実施形態を乗用型田植機に適用した場合について図面に基づいて説明する。
この実施形態では、制御装置Hによる省電力状態に切り換えるための判別処理の構成以外の他の構成は第1実施形態と同じである。そこで、第1実施形態と異なる点についてのみ説明し、同じ構成については説明は省略する。
【0105】
この実施形態では、制御装置Hが、前記エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が継続している状態において、バッテリーVの充電量が設定値以下になると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
【0106】
つまり、図20に示すように、第1実施形態における図17で示される制御動作のうち、ステップ18の処理を、バッテリーVの充電量の一例としてのバッテリーVの電圧値が予め設定されている設定値以下にまで低下したか否かを判別する処理に変更するものである。
【0107】
そして、バッテリーVの電圧値が設定値以下にまで低下したことを判別すると、断続回路96に電力遮断状態への切り換えを指令して断続回路96を遮断させ、すべての電装品への電力供給を遮断させる(ステップ18,19)。
【0108】
バッテリーVの充電量として、バッテリーVの電圧値に代えて、制御装置H及び他の電力負荷に供給される電流値を計測して、その電流値が設定値よりも低下したか否かを判別する構成としてもよい。
【0109】
〔別実施形態〕
(1)上記実施形態では、制御装置Hが、電力供給状態切換処理として、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、又は、バッテリーVの電圧値が設定値以下にまで低下すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換えるようにしたが、このような構成に代えて、バッテリーVから機体各部への電力供給状態を電力消費が殆ど無い省電力状態に切り換えるようにしてもよい。
【0110】
すなわち、上記実施形態では、バッテリーVから制御装置Hを含む全ての電装品に対して電力を供給する主電源線95を遮断させるようにしたが、例えば、図21に示すように、断続回路96が、バッテリーVから制御装置Hを除く他の全ての電装品に対して電力を供給する主電源線95を遮断させるように構成され、キースイッチ90が電源入り位置(ON)に維持されている間は、制御装置Hに対する電力供給が継続するように構成されている。そして、この制御装置Hが、自己の判断によって、消費電力が非常に少ないスリープモードに切り換え可能な構成となっており、このスリープモードでは、起動指令があるまで演算処理や判断処理等の全ての処理を休止する極低消費電力状態(電力消費が殆ど無い省電力状態に対応)となる。
【0111】
つまり、制御装置Hは、上記実施形態の図17のステップ19の処理に代えて、自己をスリープモードに切り換えるのである。このようにスリープモードに切り換えたのちは、上記実施形態と同様に、キースイッチ90が始動位置(ST)に操作されると、制御装置Hが起動して断続回路96を電力供給状態に切り換え、他の電装品にも電力が供給され、エンジン12の始動も行われることになる。
【0112】
(2)上記実施形態では、報知手段Dとして、情報表示部36における数値表示部37、表示ランプ98、ブザー99を備える構成としたが、それらのうちのいずれか1つだけを備えるものや、それらのうちのいずれか2つを備えるものでもよく、別の構成の報知手段を用いてよい。
【0113】
(3)上記実施形態では、主変速レバー53がエンジン停止位置ESに操作されて、エンジン停止センサS2がオン状態になり、その状態が設定時間(例えば数秒間)以上継続すると、エンジン停止条件が成立する構成としたが、このような構成に代えて次のa〜eに記載した構成でもよく、又、その他の種々の条件を用いることができる。
【0114】
a.主変速レバー53とは別のエンジン停止専用又は他の操作を兼用する操作具(例えば、スイッチやレバー等)が操作されたこと。
b.ブレーキペダル52が踏み込み操作されたこと。
c.主変速レバー53が中立位置Nに操作されたこと。
d.走行停止状態で植付クラッチ40を遮断状態に操作すること。
e.走行停止状態で苗植付装置4を手動操作にて上昇位置にまで上昇させたこと。
f.主クラッチを備えるものであれば、主クラッチの切り操作が行われたこと。
【0115】
(4)上記実施形態では、図16及び図17のステップ3〜ステップ12の種々の条件のうちのいずれかが成立するとエンジン12を停止させないようにしたが、ステップ3〜ステップ12に示す全ての条件を夫々判別するものに代えて、それらのうちのいずれか1つ又は選択された2つ以上の条件を判別する構成としてもよい。
【0116】
例えば、エンジン停止条件が成立し且つエンジン冷却水の温度が設定温度を超えていればエンジン12を停止させる構成、エンジン停止条件が成立し且つバッテリーVの電圧が設定電圧を越えていればエンジン12を停止させる構成、エンジン停止条件が成立し且つ接地フロート23が田面Gに接地していればエンジン12を停止させる構成等、いずれか1つの牽制条件だけを判別する構成でもよい。又、複数の条件のうちの選択された2つ以上の牽制条件だけを判別する構成でもよい。
【0117】
(5)上記実施形態では、キースイッチ90からキーKが抜き外されているという条件、運転座席15に設けられた着座スイッチS13がオフであるという条件、ボンネット13が開放されているという条件の少なくともいずれかの条件が成立すると、エンジン12の始動を牽制するようにしたが、上記した3つの条件のうちのいずれか1つを判別するようにしたり、上記した3つの条件以外の他の条件を判別するようにしてもよく、又、このような牽制条件を判別しない構成としてもよい。
【0118】
(6)上記実施形態では、制御装置Hが、主変速レバー53のエンジン停止用の操作に伴って、苗植付装置4を最大上昇位置まで上昇させる昇降操作処理を実行したのちに、エンジン自動停止処理を実行するようにしたが、このような構成に代えて、昇降操作処理を実行することなく、苗植付装置4が田面Gに接地している状態でそのままエンジン12を停止させるようにしてもよい。又、昇降操作処理として、設定位置の一例である昇降範囲の途中位置にまで上昇させるようにしてもよく、設定位置を操縦者が苗補給作業が行い易い任意の高さに変更調整することができるようにしてもよい。
【0119】
(7)上記実施形態では、主変速レバー53のエンジン停止用の特定位置としてのエンジン停止位置ESが、中立位置Nのうちで前進側中立位置Nfに対して後進側中立位置Nrとは反対側に位置する状態で設定されたが、エンジン停止位置ESを、後進側中立位置Nrに対して前進側中立位置Nfとは反対側に位置する状態で設定するものでもよい。
【0120】
(8)上記実施形態では、水田作業機として乗用型田植機を例示したが、本発明は乗用型の直播機にも適用できる。
【産業上の利用可能性】
【0121】
本発明は、乗用型田植機や乗用型の直播機等の水田作業機に適用できる。
【符号の説明】
【0122】
3 走行機体
4 作業装置(苗植付装置)
12 エンジン
52 他方の操作具(ブレーキペダル)
53 一方の操作具(主変速レバー)
90 キースイッチ
98 表示ランプ
99 ブザー
D 報知手段
H 制御手段
L モード表示手段
SW モード切換手段
V バッテリー
【特許請求の範囲】
【請求項1】
エンジンを搭載した走行機体に作業装置が連結され、
前記走行機体に機体各部の作動を制御する制御手段が備えられ、
前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機であって、
前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が設定時間以上継続すると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている水田作業機。
【請求項2】
エンジンを搭載した走行機体に作業装置が連結され、
前記走行機体に機体各部の作動を制御する制御手段が備えられ、
前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機であって、
前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が継続している状態において、前記バッテリーの充電量が設定値以下になると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている水田作業機。
【請求項3】
前記制御手段が、前記キースイッチ以外の操作具であり且つ異なる2つの操作具のうちのいずれか一方の操作具のエンジン停止用の操作に伴って、前記エンジン自動停止処理を実行し、前記2つの操作具のうちの他方の操作具のエンジン始動用の操作に伴って、前記エンジン自動始動処理を実行するように構成されている請求項1又は2記載の水田作業機。
【請求項4】
前記エンジン自動停止処理が実行されることにより前記エンジンが作動停止している状態であることを報知する報知手段が備えられている請求項1〜3のいずれか1項に記載の水田作業機。
【請求項5】
前記報知手段が、前記走行機体における操縦部の前方箇所に位置するセンターマスコットに内装された表示ランプである請求項4記載の水田作業機。
【請求項6】
前記報知手段が、警報音を発生するブザーである請求項4記載の水田作業機。
【請求項7】
前記制御手段を、前記エンジン自動停止処理の実行を許容するエンジン自動停止可能モードと、前記エンジン自動停止処理の実行を禁止するエンジン自動停止不可モードとに切り換える手動操作式のモード切換手段が備えられ、
前記エンジン自動停止可能モード及び前記エンジン自動停止不可モードのいずれのモードであるかを表示するモード表示手段が備えられている請求項1〜6のいずれか1項に記載の水田作業機。
【請求項1】
エンジンを搭載した走行機体に作業装置が連結され、
前記走行機体に機体各部の作動を制御する制御手段が備えられ、
前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機であって、
前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が設定時間以上継続すると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている水田作業機。
【請求項2】
エンジンを搭載した走行機体に作業装置が連結され、
前記走行機体に機体各部の作動を制御する制御手段が備えられ、
前記制御手段が、キースイッチがオン操作されている状態において、前記エンジンの作動を停止させるエンジン自動停止処理、及び、そのエンジン自動停止処理にて前記エンジンの作動を停止させたのちに前記エンジンを始動させるエンジン自動始動処理を実行するように構成されている水田作業機であって、
前記制御手段が、前記エンジン自動停止処理を実行したのちにおいてもバッテリーから機体各部への電力供給を維持し、且つ、前記エンジン自動停止処理を実行してから前記エンジン自動始動処理を実行しない状態が継続している状態において、前記バッテリーの充電量が設定値以下になると、前記バッテリーから機体各部への電力供給状態を電力消費が無い又は殆ど無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている水田作業機。
【請求項3】
前記制御手段が、前記キースイッチ以外の操作具であり且つ異なる2つの操作具のうちのいずれか一方の操作具のエンジン停止用の操作に伴って、前記エンジン自動停止処理を実行し、前記2つの操作具のうちの他方の操作具のエンジン始動用の操作に伴って、前記エンジン自動始動処理を実行するように構成されている請求項1又は2記載の水田作業機。
【請求項4】
前記エンジン自動停止処理が実行されることにより前記エンジンが作動停止している状態であることを報知する報知手段が備えられている請求項1〜3のいずれか1項に記載の水田作業機。
【請求項5】
前記報知手段が、前記走行機体における操縦部の前方箇所に位置するセンターマスコットに内装された表示ランプである請求項4記載の水田作業機。
【請求項6】
前記報知手段が、警報音を発生するブザーである請求項4記載の水田作業機。
【請求項7】
前記制御手段を、前記エンジン自動停止処理の実行を許容するエンジン自動停止可能モードと、前記エンジン自動停止処理の実行を禁止するエンジン自動停止不可モードとに切り換える手動操作式のモード切換手段が備えられ、
前記エンジン自動停止可能モード及び前記エンジン自動停止不可モードのいずれのモードであるかを表示するモード表示手段が備えられている請求項1〜6のいずれか1項に記載の水田作業機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−60895(P2012−60895A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−205383(P2010−205383)
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]