
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、水田の稲列を認識して自走する小型の水田除草ロボットに関する。
【背景技術】
【0002】
より安全な食料供給、環境保全型農業の実現に向けて自然農法(有機農法)に取り組む農家にとって除草作業が大きな負担となっている。
従来、歩行型、乗用型の除草機が使われているが、作業中は常に人が操作する必要があり、除草剤を使う慣行農法に比べると労働コストが大きい。
そのため、稲列を認識して自走する小型の水田除草ロボットの開発が行われている(特許文献1、非特許文献1及び非特許文献2を参照)。
この公知技術は、二枚の板部及び該板部を支持する四本の支持柱を有する装置本体と、該装置本体の両側面に設置されるクローラと、該クローラに駆動力を供給するモータと、該モータに接続され、種々の制御を行うコントロール部と、該コントロール部に接続され、圃場走行装置の周辺に存在する農作物等を検出するセンサと、前記モータ、前記センサ及び前記コントロール部に電力を供給する電池とを具備し、予めプログラムされた走行経路に基づいて自立走行可能に構成された圃場走行装置である。
【0003】
また、田植え初期から適切に繰り返し遠隔操作や自動運転で、除草作業が行える農業管理ロボットが知られている(特許文献2及び特許文献3を参照)。
この公知技術は、機体中央部に駆動用エンジンを具備した構造で、着脱自在な除草を兼ねた前後左右車輪で構成され、機体側面と前後部に具備されている接触圧センサーにより稲株位置を感知し、エンジンの車軸への出力供給を機体上部に搭載されているコンピュータで車輪の正転、逆転、停止、回転数変換を制御して条間に沿って自動走行しながら土壌撹拌と除草作業を行い、またスイッチの切り替えにより人がカメラの映像を遠隔操縦装置で映像を確認しながら遠隔操作できる農業管理ロボットである。
これらの公知技術はいずれも水田の稲列の末端でのUターン反転について何ら配慮されていないものであり、場合によっては稲列の両端を踏み潰して次の稲列に向かうような動作を行うことになり、田圃の実情に合わないものであった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−198604号公報
【特許文献2】特開2007−82523号公報
【特許文献3】特開2005−65664号公報
【非特許文献】
【0005】
【非特許文献1】岐阜県情報技術研究所研究報告第10号、平成20年度、p.35−39、水田用小型除草ロボット(アイガモロボット)の開発―自律走行のためのハードウエア検討―
【非特許文献2】岐阜県情報技術研究所研究報告第9号、平成19年度、p.29−32、水稲のクリーン農業を支援するロボット(アイガモロボット)の実証研究
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の水田除草ロボットは、2つの矩形の第一台座及び第二台座を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニットと、前記第一台座下面に設けた垂直軸に水平回転可能に連結された第一ターンテーブルと、前記第二台座下面に設けた垂直軸に水平回転可能に連結された第二ターンテーブルと、前記第一ターンテーブルに固定され、クローラを備えた第一走行ユニットと、前記第二ターンテーブルに固定され、クローラを備えた第二走行ユニットと、前記台座ユニット上に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニットとから構成されているものである。
前記台座ユニットは、2つの矩形の第一台座及び第二台座を突き合わせて、突き合わせ重合部分に回転軸を挿通して回転可能に両者を枢支し、前記第一台座又は第二台座に固定された電動モータにより前記第一台座又は第二台座を水平状態から垂直状態へ又は垂直状態から水平状態へ起伏回転可能にしたものである。
前記制御ユニットは、前記台座ユニット上に並行移動可能に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵したものである。
【発明の効果】
【0008】
本発明の水田除草ロボットは、2つの矩形の第一台座及び第二台座を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニットと、前記第一台座下面に設けた垂直軸に水平回転可能に連結された第一ターンテーブルと、前記第二台座下面に設けた垂直軸に水平回転可能に連結された第二ターンテーブルと、前記第一ターンテーブルに固定され、クローラを備えた第一走行ユニットと、前記第二ターンテーブルに固定され、クローラを備えた第二走行ユニットと、前記台座ユニット上に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニットとから構成されているため、最小面積で水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる。
【図面の簡単な説明】
【0009】
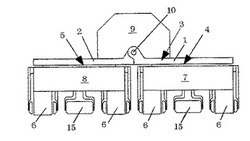
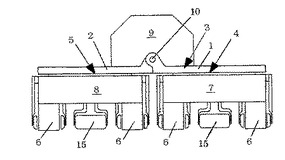
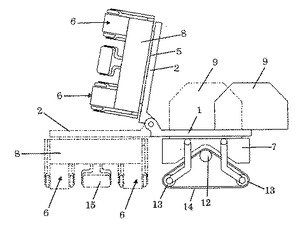
【図1】本発明の水田除草ロボットの一部省略して示す正面図である。
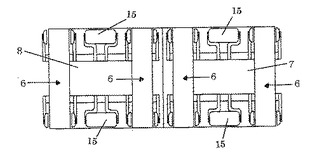
【図2】本発明の水田除草ロボットの一部省略して示す底面図である。
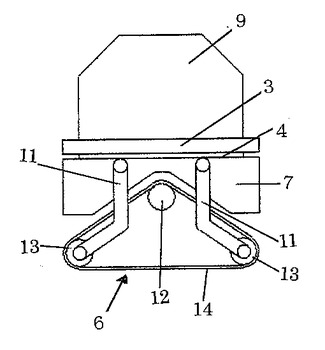
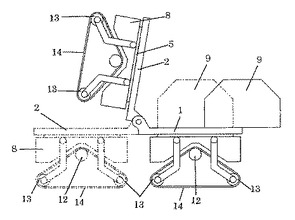
【図3】本発明の水田除草ロボットの一部省略して示す側面図である。
【図4】本発明の水田除草ロボットを概略直行する稲列に移動する場合の説明図である。
【図5】本発明の水田除草ロボットを平行な稲列に移動する場合の説明図である。
【発明を実施するための形態】
【0010】
本発明の水田除草ロボットの一実施例を添付図面に基づいて、以下に説明する。
図1の正面図に示すように、本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
【0011】
前記台座ユニット3は、2つの矩形の第一台座1及び第二台座2を突き合わせて、突き合わせ重合部分に回転軸10を挿通して回転可能に両者を枢支し、前記第一台座1又は第二台座2に固定された電動モータ(図示省略)により前記第一台座1又は第二台座2を水平状態から垂直状態へ又は垂直状態から水平状態へ起伏回転可能にしたものである。
【0012】
前記第一ターンテーブル4は、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結され、図示しない電動モータにより前記垂直軸(図示省略)が0°〜90°回転駆動されてターン回転される。
前記第二ターンテーブル5は、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結され、第一ターンテーブル4と同様に図示しない電動モータにより前記垂直軸(図示省略)が0°〜90°回転駆動されてターン回転される。
【0013】
前記第一走行ユニット7は、前記第一ターンテーブル4に固定され、図2に示すように、両端にクローラ6を備え、図3に示すように、前記クローラ6は、前記第一走行ユニット7に取り付けられた駆動輪12と、前記第一走行ユニット7に取り付けられた前後方向の支持フレーム11の先端の従動輪13と、前記駆動輪12と従動輪13とに三角形状に掛け渡されたクローラベルト14からなるものである。
前記第二走行ユニット8は、前記第二ターンテーブル5に固定され、図2に示すように、両端にクローラ6を備え、第一走行ユニット7と同様に図3に示すように、前記クローラ6は、前記第一走行ユニット7に取り付けられた駆動輪12と、前記第一走行ユニット7に取り付けられた前後方向の支持フレーム11の先端の従動輪13と、前記駆動輪12と従動輪13とに三角形状に掛け渡されたクローラベルト14からなるものである。
なお、本実施例においては、図1に示すように、それぞれの第一走行ユニット7及び第二走行ユニット8の両端のクローラ6の間に稲列の間隔を空けて除草ローラ15を前後に2基設けている。前記除草ローラ15の表面には凹凸を形成し、稲列間の雑草を踏み潰すようになっている。
【0014】
前記制御ユニット9は、前記台座ユニット3上に並行移動可能に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵したものである。第一ターンテーブル4と第一走行ユニット7又は第二ターンテーブル5と第二走行ユニット8の屈曲動作によって水田除草ロボットの重心がクローラ6の外に出ないように前記制御ユニット9が並行移動して水田除草ロボットの転倒を防止している。
【0015】
次に、本発明の水田除草ロボットの操作動作を添付図面に基づいて、以下に説明する。
最初に、制御ユニット9に内蔵されているエンジン発電機を駆動して電源装置及び電動モータ(図示省略)に電気を供給すると共に、前記電源装置からの電源により制御基板、カメラ、制御ユニット用電動モータを作動可能にする。
次に、前記制御ユニット9の制御により、電動モータ(図示省略)を始動して駆動輪12を作動させてクローラ6を回転させて水田除草ロボットを走行させる。この走行時にクローラ6及び除草ローラ15により雑草を踏み潰して除草する。本実施例の場合には、6列の稲列を除草するようになっており、前記制御ユニット9のカメラにより前進走行状態をチェックすることができる。
稲列の終端まで到着したら、図4ではすでに第一台座1は姿勢を90°変更済みの状態であるがさらに第二台座2を変更させるように、図1に示す台座ユニット3上の制御ユニット9を制御ユニット用電動モータ(図示省略)により図4に示すように一点鎖線又は実線のように第一台座1側に並行移動させ、第二台座2を起立させた場合に水田除草ロボットの重心がクローラ6の外に出ないようにする。なお、第二台座2を起立させた場合には、実線で示す位置まで前記制御ユニット9を移動させると重心の関係から安全である。
【0016】
そして、電動モータ(図示省略)を駆動して図4に示す点線位置から第二台座2及び第二走行ユニット8を実線位置まで起立させ、起立させた状態でさらに第二ターンテーブル5を駆動して90°回転させ、図5の実線の姿勢に第二走行ユニット8及びクローラ6を変更させる。次に、第二台座2及び第二走行ユニット8を倒伏させて点線の状態に戻して、図5の点線の状態で隣接する6列の稲列へ駆動輪12を駆動してクローラ6により並行移動する。
6列の稲列へ並行移動を完了したら、さらに前述した動作の逆動作を行い、第二台座2及び第二走行ユニット8を図5の点線の状態から図5の実線の起立状態、第二ターンテーブル5を駆動して90°回転させ、図4の起立状態から図4の倒伏した第二台座2及び第二走行ユニット8の状態、さらに反対側の第一台座1及び第一走行ユニット7を同様にして姿勢を90°回転して全体を図1に示す実線の状態へ戻して、すなわち最小面積でUターンして、つぎに水田除草ロボットを逆走行させて6列の稲列の除草を行う。
【符号の説明】
【0017】
1 第一台座
2 第二台座
3 台座ユニット
4 第一ターンテーブル
5 第二ターンテーブル
6 クローラ
7 第一走行ユニット
8 第二走行ユニット
9 制御ユニット
10 回転軸
11 支持フレーム
12 駆動輪
13 従動輪
14 クローラベルト
15 除草ローラ
【技術分野】
【0001】
本発明は、水田の稲列を認識して自走する小型の水田除草ロボットに関する。
【背景技術】
【0002】
より安全な食料供給、環境保全型農業の実現に向けて自然農法(有機農法)に取り組む農家にとって除草作業が大きな負担となっている。
従来、歩行型、乗用型の除草機が使われているが、作業中は常に人が操作する必要があり、除草剤を使う慣行農法に比べると労働コストが大きい。
そのため、稲列を認識して自走する小型の水田除草ロボットの開発が行われている(特許文献1、非特許文献1及び非特許文献2を参照)。
この公知技術は、二枚の板部及び該板部を支持する四本の支持柱を有する装置本体と、該装置本体の両側面に設置されるクローラと、該クローラに駆動力を供給するモータと、該モータに接続され、種々の制御を行うコントロール部と、該コントロール部に接続され、圃場走行装置の周辺に存在する農作物等を検出するセンサと、前記モータ、前記センサ及び前記コントロール部に電力を供給する電池とを具備し、予めプログラムされた走行経路に基づいて自立走行可能に構成された圃場走行装置である。
【0003】
また、田植え初期から適切に繰り返し遠隔操作や自動運転で、除草作業が行える農業管理ロボットが知られている(特許文献2及び特許文献3を参照)。
この公知技術は、機体中央部に駆動用エンジンを具備した構造で、着脱自在な除草を兼ねた前後左右車輪で構成され、機体側面と前後部に具備されている接触圧センサーにより稲株位置を感知し、エンジンの車軸への出力供給を機体上部に搭載されているコンピュータで車輪の正転、逆転、停止、回転数変換を制御して条間に沿って自動走行しながら土壌撹拌と除草作業を行い、またスイッチの切り替えにより人がカメラの映像を遠隔操縦装置で映像を確認しながら遠隔操作できる農業管理ロボットである。
これらの公知技術はいずれも水田の稲列の末端でのUターン反転について何ら配慮されていないものであり、場合によっては稲列の両端を踏み潰して次の稲列に向かうような動作を行うことになり、田圃の実情に合わないものであった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−198604号公報
【特許文献2】特開2007−82523号公報
【特許文献3】特開2005−65664号公報
【非特許文献】
【0005】
【非特許文献1】岐阜県情報技術研究所研究報告第10号、平成20年度、p.35−39、水田用小型除草ロボット(アイガモロボット)の開発―自律走行のためのハードウエア検討―
【非特許文献2】岐阜県情報技術研究所研究報告第9号、平成19年度、p.29−32、水稲のクリーン農業を支援するロボット(アイガモロボット)の実証研究
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の水田除草ロボットは、2つの矩形の第一台座及び第二台座を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニットと、前記第一台座下面に設けた垂直軸に水平回転可能に連結された第一ターンテーブルと、前記第二台座下面に設けた垂直軸に水平回転可能に連結された第二ターンテーブルと、前記第一ターンテーブルに固定され、クローラを備えた第一走行ユニットと、前記第二ターンテーブルに固定され、クローラを備えた第二走行ユニットと、前記台座ユニット上に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニットとから構成されているものである。
前記台座ユニットは、2つの矩形の第一台座及び第二台座を突き合わせて、突き合わせ重合部分に回転軸を挿通して回転可能に両者を枢支し、前記第一台座又は第二台座に固定された電動モータにより前記第一台座又は第二台座を水平状態から垂直状態へ又は垂直状態から水平状態へ起伏回転可能にしたものである。
前記制御ユニットは、前記台座ユニット上に並行移動可能に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵したものである。
【発明の効果】
【0008】
本発明の水田除草ロボットは、2つの矩形の第一台座及び第二台座を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニットと、前記第一台座下面に設けた垂直軸に水平回転可能に連結された第一ターンテーブルと、前記第二台座下面に設けた垂直軸に水平回転可能に連結された第二ターンテーブルと、前記第一ターンテーブルに固定され、クローラを備えた第一走行ユニットと、前記第二ターンテーブルに固定され、クローラを備えた第二走行ユニットと、前記台座ユニット上に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニットとから構成されているため、最小面積で水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の水田除草ロボットの一部省略して示す正面図である。
【図2】本発明の水田除草ロボットの一部省略して示す底面図である。
【図3】本発明の水田除草ロボットの一部省略して示す側面図である。
【図4】本発明の水田除草ロボットを概略直行する稲列に移動する場合の説明図である。
【図5】本発明の水田除草ロボットを平行な稲列に移動する場合の説明図である。
【発明を実施するための形態】
【0010】
本発明の水田除草ロボットの一実施例を添付図面に基づいて、以下に説明する。
図1の正面図に示すように、本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
【0011】
前記台座ユニット3は、2つの矩形の第一台座1及び第二台座2を突き合わせて、突き合わせ重合部分に回転軸10を挿通して回転可能に両者を枢支し、前記第一台座1又は第二台座2に固定された電動モータ(図示省略)により前記第一台座1又は第二台座2を水平状態から垂直状態へ又は垂直状態から水平状態へ起伏回転可能にしたものである。
【0012】
前記第一ターンテーブル4は、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結され、図示しない電動モータにより前記垂直軸(図示省略)が0°〜90°回転駆動されてターン回転される。
前記第二ターンテーブル5は、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結され、第一ターンテーブル4と同様に図示しない電動モータにより前記垂直軸(図示省略)が0°〜90°回転駆動されてターン回転される。
【0013】
前記第一走行ユニット7は、前記第一ターンテーブル4に固定され、図2に示すように、両端にクローラ6を備え、図3に示すように、前記クローラ6は、前記第一走行ユニット7に取り付けられた駆動輪12と、前記第一走行ユニット7に取り付けられた前後方向の支持フレーム11の先端の従動輪13と、前記駆動輪12と従動輪13とに三角形状に掛け渡されたクローラベルト14からなるものである。
前記第二走行ユニット8は、前記第二ターンテーブル5に固定され、図2に示すように、両端にクローラ6を備え、第一走行ユニット7と同様に図3に示すように、前記クローラ6は、前記第一走行ユニット7に取り付けられた駆動輪12と、前記第一走行ユニット7に取り付けられた前後方向の支持フレーム11の先端の従動輪13と、前記駆動輪12と従動輪13とに三角形状に掛け渡されたクローラベルト14からなるものである。
なお、本実施例においては、図1に示すように、それぞれの第一走行ユニット7及び第二走行ユニット8の両端のクローラ6の間に稲列の間隔を空けて除草ローラ15を前後に2基設けている。前記除草ローラ15の表面には凹凸を形成し、稲列間の雑草を踏み潰すようになっている。
【0014】
前記制御ユニット9は、前記台座ユニット3上に並行移動可能に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵したものである。第一ターンテーブル4と第一走行ユニット7又は第二ターンテーブル5と第二走行ユニット8の屈曲動作によって水田除草ロボットの重心がクローラ6の外に出ないように前記制御ユニット9が並行移動して水田除草ロボットの転倒を防止している。
【0015】
次に、本発明の水田除草ロボットの操作動作を添付図面に基づいて、以下に説明する。
最初に、制御ユニット9に内蔵されているエンジン発電機を駆動して電源装置及び電動モータ(図示省略)に電気を供給すると共に、前記電源装置からの電源により制御基板、カメラ、制御ユニット用電動モータを作動可能にする。
次に、前記制御ユニット9の制御により、電動モータ(図示省略)を始動して駆動輪12を作動させてクローラ6を回転させて水田除草ロボットを走行させる。この走行時にクローラ6及び除草ローラ15により雑草を踏み潰して除草する。本実施例の場合には、6列の稲列を除草するようになっており、前記制御ユニット9のカメラにより前進走行状態をチェックすることができる。
稲列の終端まで到着したら、図4ではすでに第一台座1は姿勢を90°変更済みの状態であるがさらに第二台座2を変更させるように、図1に示す台座ユニット3上の制御ユニット9を制御ユニット用電動モータ(図示省略)により図4に示すように一点鎖線又は実線のように第一台座1側に並行移動させ、第二台座2を起立させた場合に水田除草ロボットの重心がクローラ6の外に出ないようにする。なお、第二台座2を起立させた場合には、実線で示す位置まで前記制御ユニット9を移動させると重心の関係から安全である。
【0016】
そして、電動モータ(図示省略)を駆動して図4に示す点線位置から第二台座2及び第二走行ユニット8を実線位置まで起立させ、起立させた状態でさらに第二ターンテーブル5を駆動して90°回転させ、図5の実線の姿勢に第二走行ユニット8及びクローラ6を変更させる。次に、第二台座2及び第二走行ユニット8を倒伏させて点線の状態に戻して、図5の点線の状態で隣接する6列の稲列へ駆動輪12を駆動してクローラ6により並行移動する。
6列の稲列へ並行移動を完了したら、さらに前述した動作の逆動作を行い、第二台座2及び第二走行ユニット8を図5の点線の状態から図5の実線の起立状態、第二ターンテーブル5を駆動して90°回転させ、図4の起立状態から図4の倒伏した第二台座2及び第二走行ユニット8の状態、さらに反対側の第一台座1及び第一走行ユニット7を同様にして姿勢を90°回転して全体を図1に示す実線の状態へ戻して、すなわち最小面積でUターンして、つぎに水田除草ロボットを逆走行させて6列の稲列の除草を行う。
【符号の説明】
【0017】
1 第一台座
2 第二台座
3 台座ユニット
4 第一ターンテーブル
5 第二ターンテーブル
6 クローラ
7 第一走行ユニット
8 第二走行ユニット
9 制御ユニット
10 回転軸
11 支持フレーム
12 駆動輪
13 従動輪
14 クローラベルト
15 除草ローラ
【特許請求の範囲】
【請求項1】
2つの矩形の第一台座及び第二台座を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニットと、前記第一台座下面に設けた垂直軸に水平回転可能に連結された第一ターンテーブルと、前記第二台座下面に設けた垂直軸に水平回転可能に連結された第二ターンテーブルと、前記第一ターンテーブルに固定され、クローラを備えた第一走行ユニットと、前記第二ターンテーブルに固定され、クローラを備えた第二走行ユニットと、前記台座ユニット上に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニットとから構成されていることを特徴とする水田除草ロボット。
【請求項2】
前記台座ユニットは、2つの矩形の第一台座及び第二台座を突き合わせて、突き合わせ重合部分に回転軸を挿通して回転可能に両者を枢支し、前記第一台座又は第二台座に固定された電動モータにより前記第一台座又は第二台座を水平状態から垂直状態へ又は垂直状態から水平状態へ起伏回転可能にしたことを特徴とする請求項1記載の水田除草ロボット。
【請求項3】
前記制御ユニットは、前記台座ユニット上に並行移動可能に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵したことを特徴とする請求項1記載の水田除草ロボット。
【請求項1】
2つの矩形の第一台座及び第二台座を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニットと、前記第一台座下面に設けた垂直軸に水平回転可能に連結された第一ターンテーブルと、前記第二台座下面に設けた垂直軸に水平回転可能に連結された第二ターンテーブルと、前記第一ターンテーブルに固定され、クローラを備えた第一走行ユニットと、前記第二ターンテーブルに固定され、クローラを備えた第二走行ユニットと、前記台座ユニット上に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニットとから構成されていることを特徴とする水田除草ロボット。
【請求項2】
前記台座ユニットは、2つの矩形の第一台座及び第二台座を突き合わせて、突き合わせ重合部分に回転軸を挿通して回転可能に両者を枢支し、前記第一台座又は第二台座に固定された電動モータにより前記第一台座又は第二台座を水平状態から垂直状態へ又は垂直状態から水平状態へ起伏回転可能にしたことを特徴とする請求項1記載の水田除草ロボット。
【請求項3】
前記制御ユニットは、前記台座ユニット上に並行移動可能に載置され、エンジン発電機、制御基板、カメラ、電源装置を内蔵したことを特徴とする請求項1記載の水田除草ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−229463(P2011−229463A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−102920(P2010−102920)
【出願日】平成22年4月28日(2010.4.28)
【出願人】(510119614)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月28日(2010.4.28)
【出願人】(510119614)
【Fターム(参考)】
[ Back to top ]