
水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラム
【課題】SARにより撮影された画像に基づいて水稲作付け状況を把握する際に、湛水された圃場を決定する閾値の客観性の確保が難しい。
【解決手段】クラスター分析部60は、圃場に入水し苗を移植する田植え期と、入水前である圃場準備期及び移植した水稲が苗より生長した状態となる水稲生長期の少なくとも一方とを含む2時期又は3時期についての観測対象領域のSAR画像を取得し、観測対象領域の各点での画素値の組をサンプルとしてクラスター分析を行い5クラス以上に分類する。圃場判定部70は、観測対象領域に存在する注目圃場内のサンプルのクラス毎の個数がクラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が水稲圃場であるか否かを判定する。
【解決手段】クラスター分析部60は、圃場に入水し苗を移植する田植え期と、入水前である圃場準備期及び移植した水稲が苗より生長した状態となる水稲生長期の少なくとも一方とを含む2時期又は3時期についての観測対象領域のSAR画像を取得し、観測対象領域の各点での画素値の組をサンプルとしてクラスター分析を行い5クラス以上に分類する。圃場判定部70は、観測対象領域に存在する注目圃場内のサンプルのクラス毎の個数がクラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が水稲圃場であるか否かを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リモートセンシング技術を用いて、水稲を作付けされた圃場を把握する水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラムに関する。
【背景技術】
【0002】
従来、米生産の推定・予測は、圃場への水稲の作付けを現地調査することにより行われてきた。しかし、全国レベル、都道府県レベル等の広範囲の水稲作況調査を地上からの実測により行うことは多大な労力を要する。
【0003】
世界的に見れば、一部の地域において、人工衛星や航空機から取得した光学リモートセンシングデータをもとに水稲の作付け状況を把握する手法が開発され利用されている。しかし、光学リモートセンシングは雲が存在すると観測できない。そのため、稲作において大切な時期である田植えが雨季にかかる日本においては、光学リモートセンシングでは安定した観測が難しいという問題があった。
【0004】
この点、合成開口レーダ(Synthetic Aperture Radar:SAR)を用いたリモートセンシングは雲を透過して地表を観測できる。それ故、近年、SAR画像を利用して水稲の作付け状況を把握する技術の研究がなされている。例えば、下記非特許文献1は、湛水した時期とそうでない時期との2時期でのSARの後方散乱強度の違いを利用して水田を検出する技術を示している。しかし、SARは従来の光学センサと比べると特有の現象が多く、扱いが複雑であるため、SAR画像を用いた水田観測はまだ知見が十分とは言えない。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】石塚直樹、「マイクロ波衛星画像と地理情報システムを利用して水稲作付け地を高い精度で推定する」、独立行政法人 農業環境技術研究所 平成18年度革新的農業技術習得研修テキスト、[online][平成21年11月18日検索]インターネット〈URL:http://www.niaes.affrc.go.jp/techdoc/inovlec2006/4_ishitsuka.pdf〉
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来技術では、湛水された圃場を決定する閾値を決定するサンプルの取得方法、閾値の決定手法の客観性が課題として残されていた。
【0007】
本発明は上記問題点を解決するためになされたものであり、閾値法に依らない水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る水稲作付け状況把握システムは、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握システムであって、前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析手段と、注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定手段と、を有する。
【0009】
上記水稲作付け状況把握システムは、さらに、前記観測対象領域にて前記水稲圃場であることが定まっている基準圃場についての前記クラス毎の前記サンプルの個数に基づいて前記判別式を求める判別式決定手段を有するものとすることができる。
【0010】
本発明の好適な態様は、前記クラスター分析が、初期クラス数を5以上に設定したISODATA法である水稲作付け状況把握システムである。
【0011】
本発明に係る水稲作付け状況把握方法は、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づき、演算装置を用いて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握方法であって、前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析ステップと、注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定ステップと、を有する。
【0012】
本発明に係る水稲作付け状況把握プログラムは、コンピュータを、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握するシステムとして機能させるための水稲作付け状況把握プログラムであって、当該コンピュータに、前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析機能と、注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定機能と、を実現させる。
【発明の効果】
【0013】
本発明によれば、閾値法に依らないより客観的な水稲作付け状況の把握が可能となる。また、雲の影響を受けずに地上の観測を行うことができるので、日本において田植えから生長期の間の雨季でも作付状況を把握することが可能となり、このリアルタイムな作付状況の把握により、適時かつ適切な栽培管理、生産管理の決定が可能となる。また、広範囲の圃場を少ない労力で一括して把握することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態である水稲作付け状況把握システムの概略の構成を示すブロック図である。
【図2】水稲圃場、大豆圃場及び貯水池におけるHHモードによる後方散乱係数の測定結果を示すグラフである。
【図3】水稲圃場、大豆圃場及び貯水池におけるVVモードによる後方散乱係数の測定結果を示すグラフである。
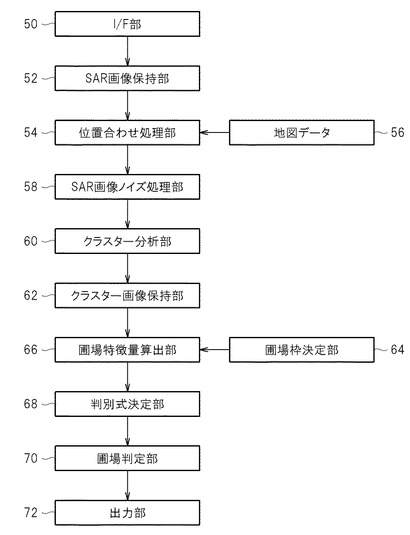
【図4】本発明の実施形態である水稲作付け状況把握システムの機能ブロック図である。
【図5】クラス数を5に設定してHHモードによる測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。
【図6】クラス数を5に設定してVVモードによる測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。
【0016】
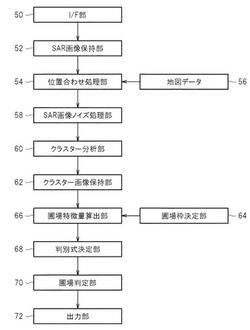
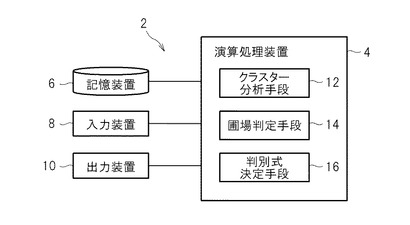
図1は、実施形態である水稲作付け状況把握システム2の概略の構成を示すブロック図である。本システムは、SARにより撮影された観測対象領域のレーダ画像(SAR画像)に基づいて、観測対象領域内に設けられる圃場を、水稲が作付けされた水稲圃場であるか否か分類する。本システムは、演算処理装置4、記憶装置6、入力装置8及び出力装置10を含んで構成される。演算処理装置4として、本システムの処理を行う専用のハードウェアを作ることも可能であるが、本実施形態では演算処理装置4は、コンピュータ及び、当該コンピュータ上で実行されるプログラムを用いて構築される。
【0017】
演算処理装置4は、コンピュータのCPU(Central Processing Unit)からなり、例えば、クラスター分析手段12、圃場判定手段14、判別式決定手段16として機能し、さらに図4を用いて後述する各種機能の主要部分を実現する。
【0018】
記憶装置6は、演算処理装置4を上記各手段12〜16などとして機能させるためのプログラム及びその他のプログラムや、本システムの処理に必要な各種データを記憶する。例えば、記憶装置6は、分析対象とするSAR画像や、分析により得られるクラスター画像を保持するために利用される。
【0019】
入力装置8は、キーボード、マウスなどであり、ユーザが本システムへの操作を行うために用いる。
【0020】
出力装置10は、ディスプレイ、プリンタなどであり、本システムにより得られる水稲作付け状況の解析結果を画面表示、印刷等によりユーザに示す等に用いられる。また、本システム以外の装置等にデータ出力してもよい。
【0021】
本システムで用いるSAR画像は、Xバンドのマイクロ波を地上に照射し、その後方散乱波を観測することにより得られるものであり、後方散乱波の強度に応じた画素値を有する。例えば、次式で表される後方散乱係数σ0を画素値とすることができる。
σ0[dB]=10log10(k・|DN|2・sinθloc )
【0022】
ここで、σ0はデシベル値で表されており、kはキャリブレーション及びプロセッサスケーリングの係数であり、DNは後方散乱の振幅であり、θlocは入射角である。
【0023】
本実施形態ではSAR衛星であるTerraSAR−XによるXバンド(波長3.1cm)での撮影データに基づくSAR画像を用いる。撮影データは送信及び受信を共に水平偏波で行うHHモードにより取得したものと、送信及び受信を共に垂直偏波で行うVVモードにより取得したものとを用いた。TerraSAR−Xの撮影モードを高分解能スポットライトとした場合には、10km×5kmの領域を分解能2.2mで撮影したデータが取得される。TerraSAR−Xは同一領域を11日周期で撮影可能である。
【0024】
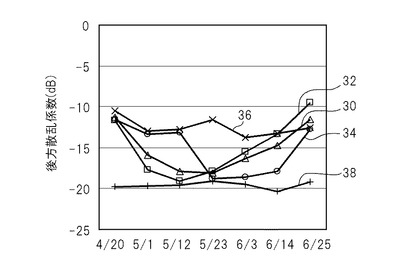
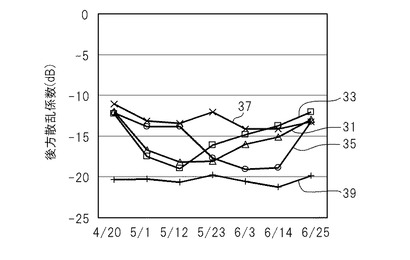
図2は、ある年における水稲圃場、大豆圃場、貯水池における後方散乱係数のHHモードによる測定結果を示すグラフである。また、図3は、水稲圃場、大豆圃場、貯水池における後方散乱係数のVVモードによる測定結果を示すグラフである。図2、図3において縦軸が後方散乱係数、横軸が撮影日であり、田植え期の前後にわたる経時変化が表されている。水稲圃場については、乾田の移植時期が互いに異なる3つの場合(慣行、早植え、遅植え)が示されており、図2の変化曲線30(△で表記),32(□で表記),34(○で表記)がそれぞれ慣行、早植え、遅植えの場合の後方散乱係数の変化を表し、また、図3の変化曲線31(△で表記),33(□で表記),35(○で表記)がそれぞれ慣行、早植え、遅植えの場合の後方散乱係数の変化を表している。また、図2の変化曲線36及び図3の変化曲線37(共に×で表記)は大豆圃場、図2の変化曲線38及び図3の変化曲線39(共に+で表記)は貯水池の後方散乱係数の変化を表している。
【0025】
図2に示すHHモード、図3に示すVVモードそれぞれの7回の撮影にて、大豆圃場の後方散乱係数は−10〜−15dBの範囲内で推移し、貯水池の後方散乱係数は−20前後を推移している。測定した早植えの水稲圃場では4月下旬に入水、5月上旬に移植され、慣行の水稲圃場では5月上旬に入水、中旬に移植され、遅植えの水稲圃場では5月下旬に入水、移植が行われた。これら3つの水稲圃場は、それぞれ入水前には大豆圃場と同程度の後方散乱係数を有し、入水から移植の時期に対応して後方散乱係数が低下して貯水池の後方散乱係数のレベルに近づき、その後、時間の経過と共に後方散乱係数は増加して再び大豆圃場と同程度のレベルとなった。この変化の特徴はHHモード、VVモードに共通であった。水稲圃場では、入水前の田起こし期には地表面の凹凸が後方散乱に影響を与え、後方散乱係数が大きくなると考えられる。また、入水から移植の時期は水で地表面が覆われている。この湛水の状態により鏡面反射が生じ、後方散乱係数が小さくなると考えられる。移植直後は稲は葉の数が少ない苗の状態であり、またそれらの間に水面が比較的よく現れているが、稲が生長し葉の数が増えるにつれ、稲が後方散乱係数に影響を与え、後方散乱係数が大きくなると考えられる。
【0026】
図4は、本システムの機能ブロック図である。インターフェース(I/F)部50は、撮影されたSAR画像を本システムに取り込む機能を有する。ユーザは水稲の栽培ごよみや衛星の撮影周期をもとにSAR画像の撮影時期を設定し、設定された複数の撮影時期における観測対象領域のSAR画像が衛星により撮影される。本システムはこのようにして撮影されたSAR画像を取り込む。
【0027】
取り込まれた時系列のSAR画像は、SAR画像保持部52に保存される。例えば、記憶装置6がSAR画像保持部として用いられる。位置合わせ処理部54は、複数時期のSAR画像をそれぞれ地図に重ね合わせることができるように、地形図や緯度経度が明確な基準地点(道路交差点、建物等)などの地図データ56をもとにSAR画像に幾何(位置)的な補正処理を行う。
【0028】
SAR画像ノイズ処理部58は、SAR画像のノイズを処理する。例えば、SAR画像ノイズ処理部58は、位置合わせ処理後のSAR画像に対してフィルタ処理を行い、SAR画像からスペックルノイズ等のノイズを除去する。例えば、フィルタ処理として、メディアンフィルタ、FrostフィルタやLeeフィルタ等が用いられ、これらはSAR画像のノイズの性状に応じて選択される。なお、位置合わせ処理部54とSAR画像ノイズ処理部58での処理順序は逆でも構わない。
【0029】
ノイズの除去処理がされたSAR画像は、クラスター分析部60によりクラスター分析される。クラスター分析の対象とされるSAR画像は、田植え期に撮影されたものと、田植え期前の期間である圃場準備期及び田植え期後の期間である水稲生長期のいずれか一方又は両方に撮影されたものとからなる複数の画像である。時間的、費用的コスト削減の観点からは利用するデータを少なくすることが好適であり、この観点から分析対象画像は田植え期の1画像と、圃場準備期及び水稲生長期のいずれか一方に撮影された1画像との合計2画像、又は田植え期の1画像と、圃場準備期及び水稲生長期にて撮影された2画像との合計3画像とすることができる。しかし、これら2時期の2画像又は3時期の3画像にさらに田植え期、圃場準備期、水稲生長期における画像を追加して、それらを分析対象画像としてもよい。
【0030】
ここで、田植え期は、水稲圃場への入水から稲の苗の植え付けまでの期間に相当する。圃場準備期は、田起こしの時期など、水稲圃場への入水前の時期である。水稲生長期は、水稲圃場内の水稲が植え付け時の状態である苗の状態よりも葉を展開させた状態、すなわち移植された稲が根を張り葉の数(葉齢)を移植時より増加させた時期を指す。葉は1週間程度で1枚増えるので、水稲生長期は田植えから1週間程度経った後の期間とすることができる。より好適には、稲の生育状況が田植え直後とは大きく変化している時期のSAR画像を水稲生長期の画像として用いる。この観点から、本実施形態では、田植え期の撮影をした時点よりもTerraSAR−Xの撮影周期で2又は3周期後を水稲生長期の撮影時期として選択している。具体的には、圃場準備期の画像として4月20日のSAR画像を用い、田植え期の画像として5月23日のSAR画像を用い、水稲成長期の画像として6月25日のSAR画像を用いた。
【0031】
クラスター分析部60は、観測対象領域内に設定される複数のサンプル点において定義されるサンプルをクラスター分析する。サンプルは、対応するサンプル点での各分析対象画像の画素値の組で定義される。例えば、分析対象画像が2時期(田植え期及び、圃場準備期又は水稲生長期のいずれか一方)にて得られた2画像I1,I2である場合には、サンプル点PにおけるサンプルSは、画像I1,I2それぞれのサンプル点Pでの画素値d1,d2の組(d1,d2)で定義される。また、分析対象画像が3時期(田植え期、圃場準備期、及び水稲生長期)にて得られた3画像I1,I2,I3である場合には、サンプルSは、画像I1,I2,I3それぞれのサンプル点Pでの画素値d1,d2,d3の組(d1,d2,d3)で定義される。なお、観測対象領域にて定義されるサンプル点Pと、各画像I1,I2,I3の画素との対応付けは、位置合わせ処理部54においてなされている。本実施形態では、SAR画像の各画素がサンプル点に対応付けられる。
【0032】
クラスター分析部60は、クラスター分析の方法としてISODATA法を用いる。ISODATA法と同じく非階層的手法かつ教師なし分類手法であるk−means法も好適である。また、教師あり分類手法を用いてもよい。サンプル数が膨大となり得る画像におけるクラスター分析には、計算量を少なくできる観点から非階層的手法が好適であるが、演算処理装置4の処理能力が高ければ、階層的手法を用いることも可能である。
【0033】
ISODATA法を用いる場合、初期クラス数は5以上に設定する。初期クラスの中心は従来の手法に基づいて設定される。例えば、分析対象画像が3画像の場合、各分析対象画像Ij(j=1,2,3)の画素値の平均μj及び標準偏差σjを求め、初期クラスの中心または重心(α1,α2,α3)の各座標値αjをμj−σj〜μj+σjの範囲に等間隔に配置する。
【0034】
SAR画像の各画素値が表す後方散乱強度には、種々の後方散乱成分が寄与している。例えば、水面による鏡面散乱成分、水稲や土壌の表面粗さによる散乱成分、建物等による2面のコーナー反射成分等である。このような成分の強弱に応じて、サンプルはクラスター分析により複数のクラスに分類される。観測対象領域は水稲圃場だけでなく、大豆やその他の作物の圃場、貯水池等、いろいろな種類の領域を含み、クラスター分析の分類結果にはそれらからの後方散乱の寄与も含まれ、各種の散乱成分の影響が現れる。
【0035】
ここでは、クラスの中心から当該クラスに属するサンプルまでの距離の平均値が小さい方から順にクラスの識別番号kを昇順に付与する。例えば、当該距離の平均値が最も小さいクラスが「クラス1」となる。
【0036】
各サンプル点でのクラスに応じた画素値を有するクラスター画像はクラスター画像保持部62に保存され、例えば、水稲作付け状況の解析結果を表示する際に、表示装置等に出力される。
【0037】
圃場枠決定部64は、観測対象領域における作付けの単位となる圃場の位置を決定する機能を有し、各圃場の範囲を表す圃場枠を求める。例えば、圃場枠決定部64は、航空写真や国土地理院発行の数値地図等に基づいて圃場枠を定める。なお、圃場枠は本システムで抽出せずに、GIS(Geographic Information System;地理情報システム)等を用いて、予め抽出された圃場枠のデータを外部から入力してもよい。
【0038】
圃場特徴量算出部66は、圃場枠をクラスター画像に重ね合わせて、圃場ごとに当該圃場枠内のクラスター画像を抽出する。そして、抽出した圃場のクラスター画像における各クラスのサンプル数の割合を特徴量として求める。具体的には、画素がサンプルに対応する本実施形態では、抽出した圃場のクラスター画像を構成する全画素数Nに対するクラスkの画素数Ckの割合(Ck/N)を特徴量χ(k)として算出する。
【0039】
水稲圃場とそれ以外の圃場とは、同じ撮影時期のSAR画像における散乱成分の違いに加え、複数の撮影時期間での散乱成分の変化に違いがある。特に、水稲圃場は、上述したように、田植え期には湛水面からの反射の影響が大きいSAR画像が得られ、圃場準備期や水稲生長期では湛水面の影響がないか小さいSAR画像が得られる点で、複数の撮影時期間での散乱成分の変化において、他の圃場と相違を有する。このような理由から、水稲圃場とそれ以外の圃場とは、特徴量のクラス間での大小関係に相違が生じ得る。
【0040】
図5は、クラス数を5に設定してHHモードの測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。また、図6は、クラス数を5に設定してVVモードの測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。図5(a)、図6(a)は慣行水稲圃場、図5(b)、図6(b)は大豆圃場、図5(c)、図6(c)は貯水池の特徴量を表しており、特徴量χ(k)は縦軸に百分率で表しており、横軸にクラスを並べている。図5(a)、図6(a)が示すように、水稲圃場ではχ(1)及びχ(3)が比較的大きく、χ(2)は小さくなる。図5(b)、図6(b)が示すように、大豆圃場ではχ(2)が他の特徴量に比べて大きくなる。図5(c)、図6(c)が示すように、貯水池ではχ(1)が他の特徴量に比べて大きくなる。
【0041】
判別式決定部68は、これらの特徴量のクラス間での大小関係に関し、注目圃場が水稲圃場であるか否かを判定する判別式を決定する。具体的には、本システムは、水稲圃場であることが予めわかっている基準圃場をユーザから指定され、その指定された圃場のクラスター画像の特徴量を算出し、当該特徴量に基づいて判別式を求める。なお、判別式は本システムで決定せずに、同様の方法で予め決定された判別式を外部から設定してもよい。
【0042】
例えば、図5、図6に示す特徴量に関して、水稲圃場を示す判別式は、次式となる。
χ(1)>χ(2)
χ(2)<χ(3) ・・・(1)
χ(3)>χ(4)
【0043】
特徴量についての同様の関係式は、大豆圃場では、
χ(1)<χ(2)
χ(2)>χ(3) ・・・(2)
χ(3)>χ(4)
となり、貯水池では、
χ(1)>χ(2)
χ(2)>χ(3) ・・・(3)
χ(3)>χ(4)
となり、これら(2),(3)式は(1)式とは相違する。
【0044】
圃場判定部70は、観測対象領域内の各圃場が判別式を満たすか否かを調べ、当該圃場が水稲圃場であるか否かを判定する。判定された結果は、出力部72により、水稲圃場の分類図にまとめられ、もしくは各圃場の作付け品目の一覧表などへ出力される。また、水稲圃場の分類図や作付け品目の一覧表などは出力装置10によりユーザに提示することができる。
【0045】
例えば、圃場判定部70は上述の判別式((1)式)を満たす圃場を水稲圃場であると判定し、満たさない圃場は水稲圃場ではないと判定する。
【0046】
本システムによれば、圃場準備期と田植え期との2時期の画像に基づく解析により田植え期と同時期に作付状況の把握が可能になる。また、2時期の画像で確実に決まった時期に作付け状況の把握が可能となり、現地調査のコストが削減ができる。また、画像枚数が少ないので、費用コスト、時間コストの削減が可能になる。さらに、一定の作業で、作付け状況を把握するので、客観性を保ち、人的ミスを軽減することができる。
【符号の説明】
【0047】
2 水稲作付け状況把握システム、4 演算処理装置、6 記憶装置、8 入力装置、10 出力装置、12 クラスター分析手段、14 圃場判定手段、16 判別式決定手段、50 インターフェース部、52 SAR画像保持部、54 位置合わせ処理部、56 地図データ、58 SAR画像ノイズ処理部、60 クラスター分析部、62 クラスター画像保持部、64 圃場枠決定部、66 圃場特徴量算出部、68 判別式決定部、70 圃場判定部、72 出力部。
【技術分野】
【0001】
本発明は、リモートセンシング技術を用いて、水稲を作付けされた圃場を把握する水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラムに関する。
【背景技術】
【0002】
従来、米生産の推定・予測は、圃場への水稲の作付けを現地調査することにより行われてきた。しかし、全国レベル、都道府県レベル等の広範囲の水稲作況調査を地上からの実測により行うことは多大な労力を要する。
【0003】
世界的に見れば、一部の地域において、人工衛星や航空機から取得した光学リモートセンシングデータをもとに水稲の作付け状況を把握する手法が開発され利用されている。しかし、光学リモートセンシングは雲が存在すると観測できない。そのため、稲作において大切な時期である田植えが雨季にかかる日本においては、光学リモートセンシングでは安定した観測が難しいという問題があった。
【0004】
この点、合成開口レーダ(Synthetic Aperture Radar:SAR)を用いたリモートセンシングは雲を透過して地表を観測できる。それ故、近年、SAR画像を利用して水稲の作付け状況を把握する技術の研究がなされている。例えば、下記非特許文献1は、湛水した時期とそうでない時期との2時期でのSARの後方散乱強度の違いを利用して水田を検出する技術を示している。しかし、SARは従来の光学センサと比べると特有の現象が多く、扱いが複雑であるため、SAR画像を用いた水田観測はまだ知見が十分とは言えない。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】石塚直樹、「マイクロ波衛星画像と地理情報システムを利用して水稲作付け地を高い精度で推定する」、独立行政法人 農業環境技術研究所 平成18年度革新的農業技術習得研修テキスト、[online][平成21年11月18日検索]インターネット〈URL:http://www.niaes.affrc.go.jp/techdoc/inovlec2006/4_ishitsuka.pdf〉
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来技術では、湛水された圃場を決定する閾値を決定するサンプルの取得方法、閾値の決定手法の客観性が課題として残されていた。
【0007】
本発明は上記問題点を解決するためになされたものであり、閾値法に依らない水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る水稲作付け状況把握システムは、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握システムであって、前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析手段と、注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定手段と、を有する。
【0009】
上記水稲作付け状況把握システムは、さらに、前記観測対象領域にて前記水稲圃場であることが定まっている基準圃場についての前記クラス毎の前記サンプルの個数に基づいて前記判別式を求める判別式決定手段を有するものとすることができる。
【0010】
本発明の好適な態様は、前記クラスター分析が、初期クラス数を5以上に設定したISODATA法である水稲作付け状況把握システムである。
【0011】
本発明に係る水稲作付け状況把握方法は、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づき、演算装置を用いて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握方法であって、前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析ステップと、注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定ステップと、を有する。
【0012】
本発明に係る水稲作付け状況把握プログラムは、コンピュータを、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握するシステムとして機能させるための水稲作付け状況把握プログラムであって、当該コンピュータに、前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析機能と、注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定機能と、を実現させる。
【発明の効果】
【0013】
本発明によれば、閾値法に依らないより客観的な水稲作付け状況の把握が可能となる。また、雲の影響を受けずに地上の観測を行うことができるので、日本において田植えから生長期の間の雨季でも作付状況を把握することが可能となり、このリアルタイムな作付状況の把握により、適時かつ適切な栽培管理、生産管理の決定が可能となる。また、広範囲の圃場を少ない労力で一括して把握することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態である水稲作付け状況把握システムの概略の構成を示すブロック図である。
【図2】水稲圃場、大豆圃場及び貯水池におけるHHモードによる後方散乱係数の測定結果を示すグラフである。
【図3】水稲圃場、大豆圃場及び貯水池におけるVVモードによる後方散乱係数の測定結果を示すグラフである。
【図4】本発明の実施形態である水稲作付け状況把握システムの機能ブロック図である。
【図5】クラス数を5に設定してHHモードによる測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。
【図6】クラス数を5に設定してVVモードによる測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。
【0016】
図1は、実施形態である水稲作付け状況把握システム2の概略の構成を示すブロック図である。本システムは、SARにより撮影された観測対象領域のレーダ画像(SAR画像)に基づいて、観測対象領域内に設けられる圃場を、水稲が作付けされた水稲圃場であるか否か分類する。本システムは、演算処理装置4、記憶装置6、入力装置8及び出力装置10を含んで構成される。演算処理装置4として、本システムの処理を行う専用のハードウェアを作ることも可能であるが、本実施形態では演算処理装置4は、コンピュータ及び、当該コンピュータ上で実行されるプログラムを用いて構築される。
【0017】
演算処理装置4は、コンピュータのCPU(Central Processing Unit)からなり、例えば、クラスター分析手段12、圃場判定手段14、判別式決定手段16として機能し、さらに図4を用いて後述する各種機能の主要部分を実現する。
【0018】
記憶装置6は、演算処理装置4を上記各手段12〜16などとして機能させるためのプログラム及びその他のプログラムや、本システムの処理に必要な各種データを記憶する。例えば、記憶装置6は、分析対象とするSAR画像や、分析により得られるクラスター画像を保持するために利用される。
【0019】
入力装置8は、キーボード、マウスなどであり、ユーザが本システムへの操作を行うために用いる。
【0020】
出力装置10は、ディスプレイ、プリンタなどであり、本システムにより得られる水稲作付け状況の解析結果を画面表示、印刷等によりユーザに示す等に用いられる。また、本システム以外の装置等にデータ出力してもよい。
【0021】
本システムで用いるSAR画像は、Xバンドのマイクロ波を地上に照射し、その後方散乱波を観測することにより得られるものであり、後方散乱波の強度に応じた画素値を有する。例えば、次式で表される後方散乱係数σ0を画素値とすることができる。
σ0[dB]=10log10(k・|DN|2・sinθloc )
【0022】
ここで、σ0はデシベル値で表されており、kはキャリブレーション及びプロセッサスケーリングの係数であり、DNは後方散乱の振幅であり、θlocは入射角である。
【0023】
本実施形態ではSAR衛星であるTerraSAR−XによるXバンド(波長3.1cm)での撮影データに基づくSAR画像を用いる。撮影データは送信及び受信を共に水平偏波で行うHHモードにより取得したものと、送信及び受信を共に垂直偏波で行うVVモードにより取得したものとを用いた。TerraSAR−Xの撮影モードを高分解能スポットライトとした場合には、10km×5kmの領域を分解能2.2mで撮影したデータが取得される。TerraSAR−Xは同一領域を11日周期で撮影可能である。
【0024】
図2は、ある年における水稲圃場、大豆圃場、貯水池における後方散乱係数のHHモードによる測定結果を示すグラフである。また、図3は、水稲圃場、大豆圃場、貯水池における後方散乱係数のVVモードによる測定結果を示すグラフである。図2、図3において縦軸が後方散乱係数、横軸が撮影日であり、田植え期の前後にわたる経時変化が表されている。水稲圃場については、乾田の移植時期が互いに異なる3つの場合(慣行、早植え、遅植え)が示されており、図2の変化曲線30(△で表記),32(□で表記),34(○で表記)がそれぞれ慣行、早植え、遅植えの場合の後方散乱係数の変化を表し、また、図3の変化曲線31(△で表記),33(□で表記),35(○で表記)がそれぞれ慣行、早植え、遅植えの場合の後方散乱係数の変化を表している。また、図2の変化曲線36及び図3の変化曲線37(共に×で表記)は大豆圃場、図2の変化曲線38及び図3の変化曲線39(共に+で表記)は貯水池の後方散乱係数の変化を表している。
【0025】
図2に示すHHモード、図3に示すVVモードそれぞれの7回の撮影にて、大豆圃場の後方散乱係数は−10〜−15dBの範囲内で推移し、貯水池の後方散乱係数は−20前後を推移している。測定した早植えの水稲圃場では4月下旬に入水、5月上旬に移植され、慣行の水稲圃場では5月上旬に入水、中旬に移植され、遅植えの水稲圃場では5月下旬に入水、移植が行われた。これら3つの水稲圃場は、それぞれ入水前には大豆圃場と同程度の後方散乱係数を有し、入水から移植の時期に対応して後方散乱係数が低下して貯水池の後方散乱係数のレベルに近づき、その後、時間の経過と共に後方散乱係数は増加して再び大豆圃場と同程度のレベルとなった。この変化の特徴はHHモード、VVモードに共通であった。水稲圃場では、入水前の田起こし期には地表面の凹凸が後方散乱に影響を与え、後方散乱係数が大きくなると考えられる。また、入水から移植の時期は水で地表面が覆われている。この湛水の状態により鏡面反射が生じ、後方散乱係数が小さくなると考えられる。移植直後は稲は葉の数が少ない苗の状態であり、またそれらの間に水面が比較的よく現れているが、稲が生長し葉の数が増えるにつれ、稲が後方散乱係数に影響を与え、後方散乱係数が大きくなると考えられる。
【0026】
図4は、本システムの機能ブロック図である。インターフェース(I/F)部50は、撮影されたSAR画像を本システムに取り込む機能を有する。ユーザは水稲の栽培ごよみや衛星の撮影周期をもとにSAR画像の撮影時期を設定し、設定された複数の撮影時期における観測対象領域のSAR画像が衛星により撮影される。本システムはこのようにして撮影されたSAR画像を取り込む。
【0027】
取り込まれた時系列のSAR画像は、SAR画像保持部52に保存される。例えば、記憶装置6がSAR画像保持部として用いられる。位置合わせ処理部54は、複数時期のSAR画像をそれぞれ地図に重ね合わせることができるように、地形図や緯度経度が明確な基準地点(道路交差点、建物等)などの地図データ56をもとにSAR画像に幾何(位置)的な補正処理を行う。
【0028】
SAR画像ノイズ処理部58は、SAR画像のノイズを処理する。例えば、SAR画像ノイズ処理部58は、位置合わせ処理後のSAR画像に対してフィルタ処理を行い、SAR画像からスペックルノイズ等のノイズを除去する。例えば、フィルタ処理として、メディアンフィルタ、FrostフィルタやLeeフィルタ等が用いられ、これらはSAR画像のノイズの性状に応じて選択される。なお、位置合わせ処理部54とSAR画像ノイズ処理部58での処理順序は逆でも構わない。
【0029】
ノイズの除去処理がされたSAR画像は、クラスター分析部60によりクラスター分析される。クラスター分析の対象とされるSAR画像は、田植え期に撮影されたものと、田植え期前の期間である圃場準備期及び田植え期後の期間である水稲生長期のいずれか一方又は両方に撮影されたものとからなる複数の画像である。時間的、費用的コスト削減の観点からは利用するデータを少なくすることが好適であり、この観点から分析対象画像は田植え期の1画像と、圃場準備期及び水稲生長期のいずれか一方に撮影された1画像との合計2画像、又は田植え期の1画像と、圃場準備期及び水稲生長期にて撮影された2画像との合計3画像とすることができる。しかし、これら2時期の2画像又は3時期の3画像にさらに田植え期、圃場準備期、水稲生長期における画像を追加して、それらを分析対象画像としてもよい。
【0030】
ここで、田植え期は、水稲圃場への入水から稲の苗の植え付けまでの期間に相当する。圃場準備期は、田起こしの時期など、水稲圃場への入水前の時期である。水稲生長期は、水稲圃場内の水稲が植え付け時の状態である苗の状態よりも葉を展開させた状態、すなわち移植された稲が根を張り葉の数(葉齢)を移植時より増加させた時期を指す。葉は1週間程度で1枚増えるので、水稲生長期は田植えから1週間程度経った後の期間とすることができる。より好適には、稲の生育状況が田植え直後とは大きく変化している時期のSAR画像を水稲生長期の画像として用いる。この観点から、本実施形態では、田植え期の撮影をした時点よりもTerraSAR−Xの撮影周期で2又は3周期後を水稲生長期の撮影時期として選択している。具体的には、圃場準備期の画像として4月20日のSAR画像を用い、田植え期の画像として5月23日のSAR画像を用い、水稲成長期の画像として6月25日のSAR画像を用いた。
【0031】
クラスター分析部60は、観測対象領域内に設定される複数のサンプル点において定義されるサンプルをクラスター分析する。サンプルは、対応するサンプル点での各分析対象画像の画素値の組で定義される。例えば、分析対象画像が2時期(田植え期及び、圃場準備期又は水稲生長期のいずれか一方)にて得られた2画像I1,I2である場合には、サンプル点PにおけるサンプルSは、画像I1,I2それぞれのサンプル点Pでの画素値d1,d2の組(d1,d2)で定義される。また、分析対象画像が3時期(田植え期、圃場準備期、及び水稲生長期)にて得られた3画像I1,I2,I3である場合には、サンプルSは、画像I1,I2,I3それぞれのサンプル点Pでの画素値d1,d2,d3の組(d1,d2,d3)で定義される。なお、観測対象領域にて定義されるサンプル点Pと、各画像I1,I2,I3の画素との対応付けは、位置合わせ処理部54においてなされている。本実施形態では、SAR画像の各画素がサンプル点に対応付けられる。
【0032】
クラスター分析部60は、クラスター分析の方法としてISODATA法を用いる。ISODATA法と同じく非階層的手法かつ教師なし分類手法であるk−means法も好適である。また、教師あり分類手法を用いてもよい。サンプル数が膨大となり得る画像におけるクラスター分析には、計算量を少なくできる観点から非階層的手法が好適であるが、演算処理装置4の処理能力が高ければ、階層的手法を用いることも可能である。
【0033】
ISODATA法を用いる場合、初期クラス数は5以上に設定する。初期クラスの中心は従来の手法に基づいて設定される。例えば、分析対象画像が3画像の場合、各分析対象画像Ij(j=1,2,3)の画素値の平均μj及び標準偏差σjを求め、初期クラスの中心または重心(α1,α2,α3)の各座標値αjをμj−σj〜μj+σjの範囲に等間隔に配置する。
【0034】
SAR画像の各画素値が表す後方散乱強度には、種々の後方散乱成分が寄与している。例えば、水面による鏡面散乱成分、水稲や土壌の表面粗さによる散乱成分、建物等による2面のコーナー反射成分等である。このような成分の強弱に応じて、サンプルはクラスター分析により複数のクラスに分類される。観測対象領域は水稲圃場だけでなく、大豆やその他の作物の圃場、貯水池等、いろいろな種類の領域を含み、クラスター分析の分類結果にはそれらからの後方散乱の寄与も含まれ、各種の散乱成分の影響が現れる。
【0035】
ここでは、クラスの中心から当該クラスに属するサンプルまでの距離の平均値が小さい方から順にクラスの識別番号kを昇順に付与する。例えば、当該距離の平均値が最も小さいクラスが「クラス1」となる。
【0036】
各サンプル点でのクラスに応じた画素値を有するクラスター画像はクラスター画像保持部62に保存され、例えば、水稲作付け状況の解析結果を表示する際に、表示装置等に出力される。
【0037】
圃場枠決定部64は、観測対象領域における作付けの単位となる圃場の位置を決定する機能を有し、各圃場の範囲を表す圃場枠を求める。例えば、圃場枠決定部64は、航空写真や国土地理院発行の数値地図等に基づいて圃場枠を定める。なお、圃場枠は本システムで抽出せずに、GIS(Geographic Information System;地理情報システム)等を用いて、予め抽出された圃場枠のデータを外部から入力してもよい。
【0038】
圃場特徴量算出部66は、圃場枠をクラスター画像に重ね合わせて、圃場ごとに当該圃場枠内のクラスター画像を抽出する。そして、抽出した圃場のクラスター画像における各クラスのサンプル数の割合を特徴量として求める。具体的には、画素がサンプルに対応する本実施形態では、抽出した圃場のクラスター画像を構成する全画素数Nに対するクラスkの画素数Ckの割合(Ck/N)を特徴量χ(k)として算出する。
【0039】
水稲圃場とそれ以外の圃場とは、同じ撮影時期のSAR画像における散乱成分の違いに加え、複数の撮影時期間での散乱成分の変化に違いがある。特に、水稲圃場は、上述したように、田植え期には湛水面からの反射の影響が大きいSAR画像が得られ、圃場準備期や水稲生長期では湛水面の影響がないか小さいSAR画像が得られる点で、複数の撮影時期間での散乱成分の変化において、他の圃場と相違を有する。このような理由から、水稲圃場とそれ以外の圃場とは、特徴量のクラス間での大小関係に相違が生じ得る。
【0040】
図5は、クラス数を5に設定してHHモードの測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。また、図6は、クラス数を5に設定してVVモードの測定結果を分析した場合の水稲圃場、大豆圃場、貯水池それぞれの特徴量を表すグラフである。図5(a)、図6(a)は慣行水稲圃場、図5(b)、図6(b)は大豆圃場、図5(c)、図6(c)は貯水池の特徴量を表しており、特徴量χ(k)は縦軸に百分率で表しており、横軸にクラスを並べている。図5(a)、図6(a)が示すように、水稲圃場ではχ(1)及びχ(3)が比較的大きく、χ(2)は小さくなる。図5(b)、図6(b)が示すように、大豆圃場ではχ(2)が他の特徴量に比べて大きくなる。図5(c)、図6(c)が示すように、貯水池ではχ(1)が他の特徴量に比べて大きくなる。
【0041】
判別式決定部68は、これらの特徴量のクラス間での大小関係に関し、注目圃場が水稲圃場であるか否かを判定する判別式を決定する。具体的には、本システムは、水稲圃場であることが予めわかっている基準圃場をユーザから指定され、その指定された圃場のクラスター画像の特徴量を算出し、当該特徴量に基づいて判別式を求める。なお、判別式は本システムで決定せずに、同様の方法で予め決定された判別式を外部から設定してもよい。
【0042】
例えば、図5、図6に示す特徴量に関して、水稲圃場を示す判別式は、次式となる。
χ(1)>χ(2)
χ(2)<χ(3) ・・・(1)
χ(3)>χ(4)
【0043】
特徴量についての同様の関係式は、大豆圃場では、
χ(1)<χ(2)
χ(2)>χ(3) ・・・(2)
χ(3)>χ(4)
となり、貯水池では、
χ(1)>χ(2)
χ(2)>χ(3) ・・・(3)
χ(3)>χ(4)
となり、これら(2),(3)式は(1)式とは相違する。
【0044】
圃場判定部70は、観測対象領域内の各圃場が判別式を満たすか否かを調べ、当該圃場が水稲圃場であるか否かを判定する。判定された結果は、出力部72により、水稲圃場の分類図にまとめられ、もしくは各圃場の作付け品目の一覧表などへ出力される。また、水稲圃場の分類図や作付け品目の一覧表などは出力装置10によりユーザに提示することができる。
【0045】
例えば、圃場判定部70は上述の判別式((1)式)を満たす圃場を水稲圃場であると判定し、満たさない圃場は水稲圃場ではないと判定する。
【0046】
本システムによれば、圃場準備期と田植え期との2時期の画像に基づく解析により田植え期と同時期に作付状況の把握が可能になる。また、2時期の画像で確実に決まった時期に作付け状況の把握が可能となり、現地調査のコストが削減ができる。また、画像枚数が少ないので、費用コスト、時間コストの削減が可能になる。さらに、一定の作業で、作付け状況を把握するので、客観性を保ち、人的ミスを軽減することができる。
【符号の説明】
【0047】
2 水稲作付け状況把握システム、4 演算処理装置、6 記憶装置、8 入力装置、10 出力装置、12 クラスター分析手段、14 圃場判定手段、16 判別式決定手段、50 インターフェース部、52 SAR画像保持部、54 位置合わせ処理部、56 地図データ、58 SAR画像ノイズ処理部、60 クラスター分析部、62 クラスター画像保持部、64 圃場枠決定部、66 圃場特徴量算出部、68 判別式決定部、70 圃場判定部、72 出力部。
【特許請求の範囲】
【請求項1】
Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握システムであって、
前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析手段と、
注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定手段と、
を有することを特徴とする水稲作付け状況把握システム。
【請求項2】
請求項1に記載の水稲作付け状況把握システムにおいて、
前記観測対象領域にて前記水稲圃場であることが定まっている基準圃場についての前記クラス毎の前記サンプルの個数に基づいて前記判別式を求める判別式決定手段を有すること、を特徴とする水稲作付け状況把握システム。
【請求項3】
請求項1又は請求項2に記載の水稲作付け状況把握システムにおいて、
前記クラスター分析は、初期クラス数を5以上に設定したISODATA法であること、を特徴とする水稲作付け状況把握システム。
【請求項4】
Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づき、演算装置を用いて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握方法であって、
前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析ステップと、
注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定ステップと、
を有することを特徴とする水稲作付け状況把握方法。
【請求項5】
コンピュータを、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握するシステムとして機能させるための水稲作付け状況把握プログラムであって、
当該コンピュータに、
前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析機能と、
注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定機能と、
を実現させることを特徴とする水稲作付け状況把握プログラム。
【請求項1】
Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握システムであって、
前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析手段と、
注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定手段と、
を有することを特徴とする水稲作付け状況把握システム。
【請求項2】
請求項1に記載の水稲作付け状況把握システムにおいて、
前記観測対象領域にて前記水稲圃場であることが定まっている基準圃場についての前記クラス毎の前記サンプルの個数に基づいて前記判別式を求める判別式決定手段を有すること、を特徴とする水稲作付け状況把握システム。
【請求項3】
請求項1又は請求項2に記載の水稲作付け状況把握システムにおいて、
前記クラスター分析は、初期クラス数を5以上に設定したISODATA法であること、を特徴とする水稲作付け状況把握システム。
【請求項4】
Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づき、演算装置を用いて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握する水稲作付け状況把握方法であって、
前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析ステップと、
注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定ステップと、
を有することを特徴とする水稲作付け状況把握方法。
【請求項5】
コンピュータを、Xバンドのマイクロ波を用いた合成開口レーダにより撮影され、後方散乱波の強度に応じた画素値を有するレーダ画像に基づいて、観測対象領域内に設けられる圃場のうち水稲を作付けされた水稲圃場を把握するシステムとして機能させるための水稲作付け状況把握プログラムであって、
当該コンピュータに、
前記水稲圃場への入水から苗の植え付けまでの田植え期と、前記水稲圃場への入水前である圃場準備期及び前記水稲圃場内の水稲が植え付け時の前記苗よりも葉を展開させた状態となる水稲生長期の少なくとも一方とを含む複数時期に撮影された前記観測対象領域の前記レーダ画像を分析対象画像とし、前記観測対象領域に複数のサンプル点を設定して、前記各分析対象画像の前記サンプル点での前記画素値の組で定義される座標を有するサンプルをクラスター分析により複数のクラスに分類するクラスター分析機能と、
注目圃場内の前記サンプル点に対応する前記サンプルの前記クラス毎の個数が前記クラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が前記水稲圃場であるか否かを判定する圃場判定機能と、
を実現させることを特徴とする水稲作付け状況把握プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−138356(P2011−138356A)
【公開日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願番号】特願2009−298470(P2009−298470)
【出願日】平成21年12月28日(2009.12.28)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 研究集会名:農業環境工学関連学会2009年合同大会 主催者: 農業機械学会、日本農業気象学会、農業施設学会、生態工学会 開催日: 平成21年9月16日
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願日】平成21年12月28日(2009.12.28)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 研究集会名:農業環境工学関連学会2009年合同大会 主催者: 農業機械学会、日本農業気象学会、農業施設学会、生態工学会 開催日: 平成21年9月16日
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]