
永久磁石回転電機及びその運転方法
【課題】高速時の誘導起電力の低減と低速時の高トルク特性が可能な永久磁石回転電機。
【解決手段】本発明は、電機子巻線23を8極にして所定の短時間だけ大電流の磁化電流を流すことによって発生する磁界により可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の8極PMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作する4極IPMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を消磁してリラクタンストルクのみで動作する4極RMモードとし、起動時及び速度領域の移行時にこれら8極PMモード、4極IPMモード及び4極RMモードの間で相互にモードを切り替えて可変速運転する永久磁石回転電機。
【解決手段】本発明は、電機子巻線23を8極にして所定の短時間だけ大電流の磁化電流を流すことによって発生する磁界により可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の8極PMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作する4極IPMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を消磁してリラクタンストルクのみで動作する4極RMモードとし、起動時及び速度領域の移行時にこれら8極PMモード、4極IPMモード及び4極RMモードの間で相互にモードを切り替えて可変速運転する永久磁石回転電機。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の極数と複数種のトルク発生モードを変更できるモード・極数可変な永久磁石回転電機及びその運転方法に関する。
【背景技術】
【0002】
環境問題や世界的なエネルギー消費量の増加の改善にはシステムの省エネルギー化が効果的である。電気自動車、電車、エレベータ、家電機器では高出力で高効率を得るために非特許文献1,2に記載されているような永久磁石回転電機が適用されている。しかし、永久磁石回転電機は可変速運転では弱め磁束制御を用いるため、中〜高速度領域や軽負荷時に効率が低下することや電圧制限下で広い可変速運転が困難であることなどの問題がある。そこで、非特許文献3〜6に記載されているような回転電機内の永久磁石の磁力を変化させて駆動する新概念の永久磁石回転電機(「メモリモータ」と称されている。)が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−72021号公報
【特許文献2】特開2009−201300号公報
【特許文献3】特開2010−004673号公報
【非特許文献】
【0004】
【非特許文献1】K.Sakai, T.Takahashi, EShimomura, M.Arata, Y.Nakazawa and T.Tajima: ”Development of permanent magnet reluctance motor suitable for variable-speed drive for electric vehicle”, T.IEE Japan, Vol.123-D, No.6, pp681-688 (2003).
【非特許文献2】K.Sakai, K.Hagiwara and Y.Hirano, ”High-power and high-efficiency permanent magnet reluctance motor for hybrid electric vehicle”, TOSHIBA REVIEW, Vol.60, No.11,pp.41-44 (2005).
【非特許文献3】K.Sakai, K.Yuki, Y.Hashiba, N.Takahashi, K.Yasui and L.Kovudhikulrungsri: “Principle and Basic Characteristics of Variable-Magnetic-Force Memory Motors”, IEEJ Trans. IA, Vol. 131, No. 1, pp.53-60 (2011).
【非特許文献4】K.Sakai, K.Yuki, D.Misu, N.Takahashi, Y.Hashiba, Y.Matsuoka and Y.Otsubo: ”Variable-magnetic-force motor assisted by reluctance torque”, 2010 National Convention Record, IEEJ, 5-012 (2010).
【非特許文献5】V.Ostovic, “Memory motors”, IEEE Industry Applications Magazine, Jan/feb., pp.52-61 (2003).
【非特許文献6】V.Ostovic, “Pole-changing permanent-magnet machines”, IEEE Transactions on Industry Applications, Vol.38, No.6 pp.1493-1499 (2002).
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、理想の可変速回転電機を目指して、高速時の永久磁石がもたらす誘導起電力の低減と低速時の高トルク発生の二律背反する特性を可能とするために、複数の極数と複数種のトルク発生モードを使い分けて駆動できる永久磁石回転電機及びその運転方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1つの特徴は、回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備え、前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石それぞれを半径方向で同一の向きに着磁し、磁石トルク主体の2n極のPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作するn極IPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態とし、前記2n極PMモード状態、n極IPMモード状態及びn極RMモード状態の間で相互にモード状態を切り替えて2n極PMモード、n極IPMモード及びn極RMモードのいずれでも運転できる永久磁石回転電機である。
【0007】
本発明の別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が半径方向で同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0008】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0009】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が半径方向で同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0010】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が半径方向で同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0011】
尚、上記の永久磁石回転電機では、回転子の極数変換の主要な変換パターンを述べたが、可変磁力磁石と固定磁力磁石を組合せて磁極を構成する場合は、可変磁力磁石の磁化による回転子の極数変換では電機子巻線の極数は2m極と4m極いずれでも可能である。したがって、電機子巻線の極数2m極と4m極による可変磁力磁石の磁化は上に述べた以外のパターンでも可能である。
【0012】
本発明のまた別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN極若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0013】
本発明のまた別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN極若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0014】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の2n極のPMモード状態にし、前記電機子巻線の結線は2n極の接続で通常の運転電流を通電することにより2n極PMモードで運転し、中速度領域では、前記電機子巻線をn極に切り替えて所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作するn極IPMモード状態にし、前記電機子巻線の結線はn極の接続で通常の運転電流を通電することによりn極IPMモードで運転し、高速度領域では、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態にし、前記電機子巻線の結線はn極の接続で通常の運転電流を通電することによりn極RMモードで運転する永久磁石回転電機の運転方法である。
【0015】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線の結線は4m極の接続で通常の運転電流を通電することにより4m極PMモードで運転し、中〜高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線は2m極の接続で通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0016】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線の結線は4m極に接続切替し、通常の運転電流を通電することにより4m極PMモードで運転し、中〜高速度領域では、前記電機子巻線の結線を2m極に接続切替して所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線は2m極の接続で通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0017】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線の結線は4m極の接続で通常の運転電流を通電することにより4m極PMモードで運転し、中〜高速度領域では、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極に接続切替して、通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0018】
尚、上記の永久磁石回転電機の運転方法でも、回転子の極数変換の主要な変換パターンを述べたが、可変磁力磁石と固定磁力磁石を組合せて磁極を構成する場合は、可変磁力磁石の磁化による回転子の極数変換では電機子巻線の極数は2m極と4m極いずれでも可能である。したがって、電機子巻線の極数2m極と4m極による可変磁力磁石の磁化は上に述べた以外のパターンでも可能である。
【0019】
本発明のまた別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線は6m極の接続で通常の運転電流を通電することにより6m極PMモードで運転し、中速〜高速度領域では、前記電機子巻線を2m極に切り替えて所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線を2m極に切り替え、通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0020】
本発明のさらに別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線を6m極に切り替え、通常の運転電流を通電することにより6m極PMモードで運転し、中速〜高速度領域では、前記電機子巻線を2m極に切り替えて所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線は2m極の接続で通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0021】
尚、上に述べた電機子巻線の切替は主に2つの方法がある。1つは、従来の極数変換と同様に複数のコイルと電磁接触器と接続して、電磁接触器で機械的に切り替える方法である。もう1つは、パワートランジスタ等のスイッチングパワー素子を用いて、複数のコイルと複数のスイッチング素子を接続し、スイッチング素子で電子的にコイルの接続を切り替えて行う方法である。
【発明の効果】
【0022】
本発明によれば、速度領域に対応してふさわしい極数とトルク発生モードに変更して可変速運転することができ、高速時の誘導起電力の低減と低速時の高トルク発生の二律背反する回転電機特性を出すことができる永久磁石回転電機が実現できる。
【図面の簡単な説明】
【0023】
【図1】第1の実施の形態の3M−PCモータの速度、トルクとモードとの対応図。
【図2】第1の実施の形態の3M−PCモータの半分の断面図。
【図3】第1の実施の形態の3M−PCモータのモード別の可変磁力磁石の着磁状態、着磁方向と極数、トルク発生モードの説明図。
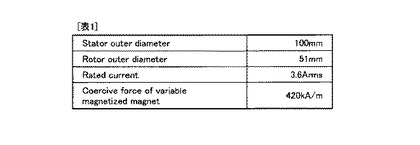
【図4】実施例1の3M−PCモータの諸元表1。
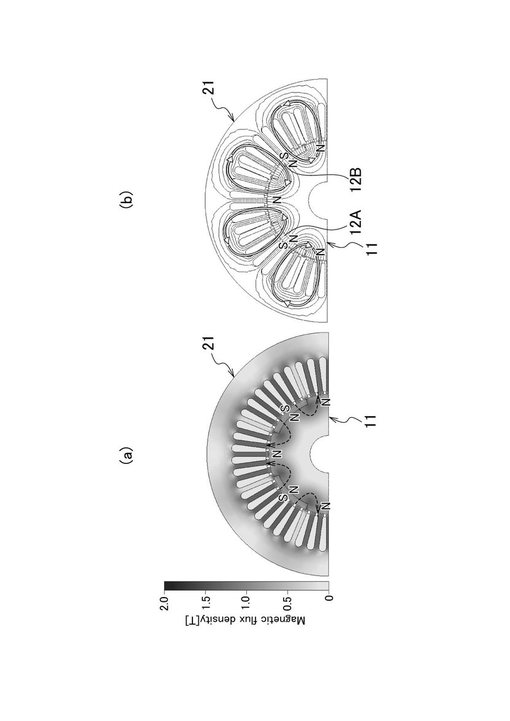
【図5】実施例1の3M−PCモータの8極永久磁石モータ(8極PM)モードでの磁束密度の分布と磁束分布を示す断面図。
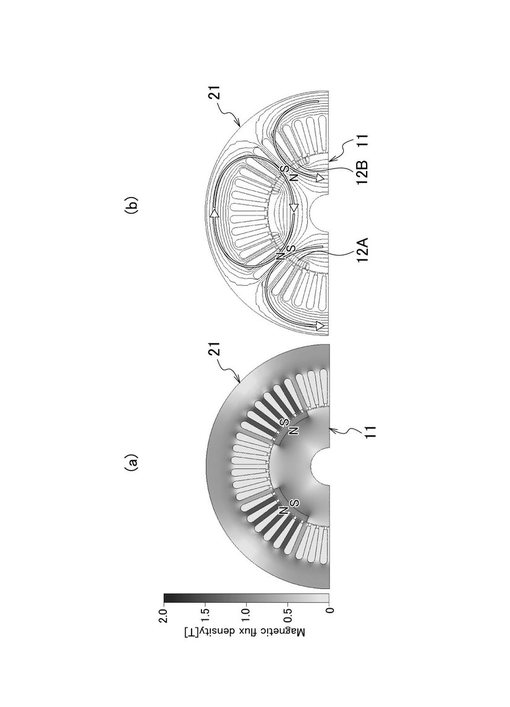
【図6】実施例1の3M−PCモータの4極埋め込み磁石モータ(4極IPM)モードでの磁束密度の分布と磁束分布を示す断面図。
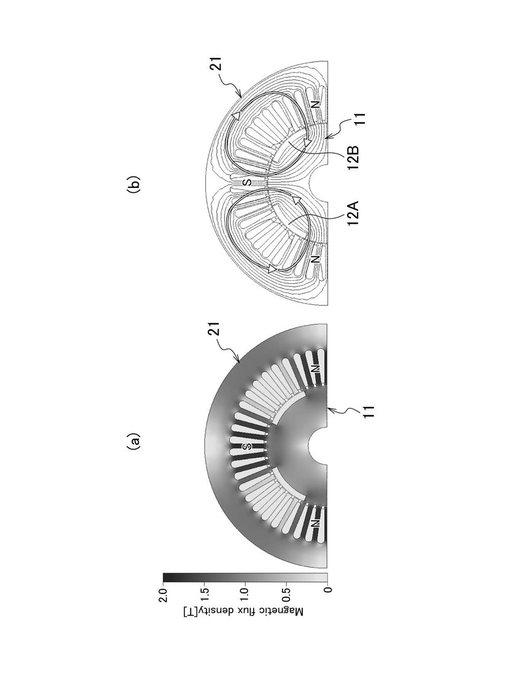
【図7】実施例1の3M−PCモータの4極リラクタンスモータ(4極RM)モードでの磁束密度の分布と磁束分布を示す断面図。
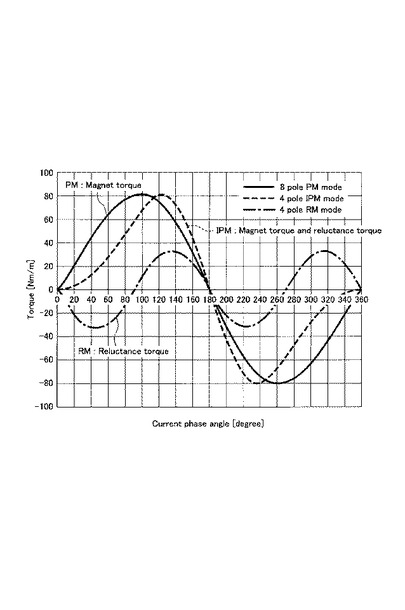
【図8】実施例1の3M−PCモータの各モードでのトルク−電流特性のグラフ。
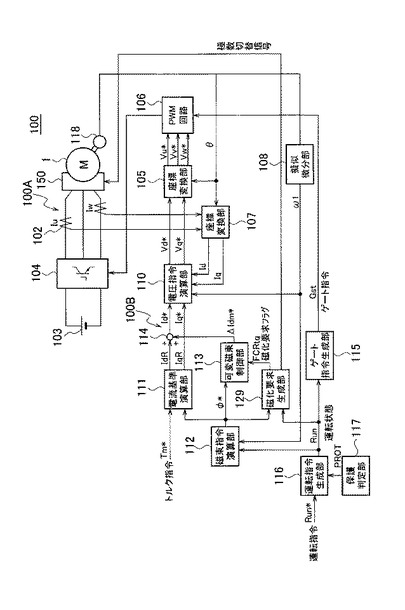
【図9】第1の実施の形態の3M−PCモータのドライブシステムのブロック図。
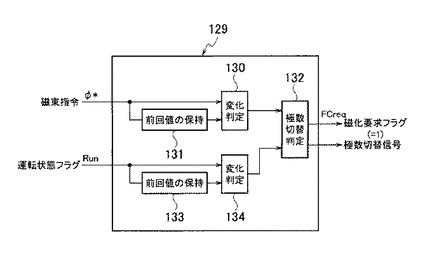
【図10】上記ドライブシステムにおける磁化要求生成部の内部構成のブロック図。
【図11】上記ドライブシステムにおける可変磁束制御部の内部構成のブロック図。
【図12】上記ドライブシステムによる電動機制御のタイミングチャート。
【図13】第2の実施の形態の2M−PCモータの半分の断面図。
【図14】第2の実施の形態の2M−PCモータの速度、トルクとモードとの対応図。
【図15】第3の実施の形態の12/4PCPMモータの1/4の断面図。
【図16】第3の実施の形態の12/4PCPMモータのモード別の可変磁力の着磁状態、着磁方向と極数、トルク発生モードの説明図。
【図17】実施例2の12/4PCPMモータの諸元表2。
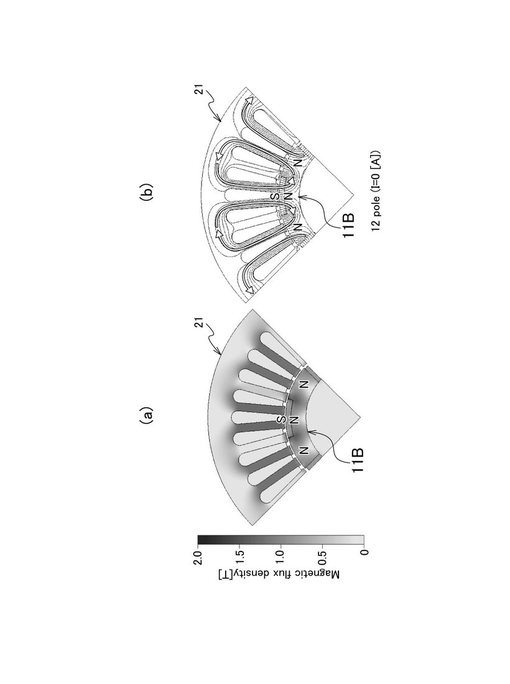
【図18】実施例2の12/4PCPMモータの12極永久磁石モータ(12極PM)モードでの磁束密度、磁束分布を示す断面図。
【図19】実施例2の12/4PCPMモータの4極埋め込み磁石モータ(4極IPM)モードでの磁束密度、磁束分布を示す断面図。
【図20】実施例2の12/4PCPMモータのモード別のトルク−電流特性のグラフ。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態を図に基づいて詳説する。
【0025】
[第1の実施の形態]
第1の実施の形態の永久磁石回転電機は、極数変換ができ、3種類のトルク発生モードで動作できる3M−PCモータ1である。3M−PCモータ1は、可変磁力磁石の磁化方向を変えたり消磁したりすることにより永久磁石回転電機で極数変換と共にトルク発生モードを変更して3種類のモードで動作できる。すなわち、8極永久磁石モータ(8極PM)モード、4極埋め込み磁石モータ(4極IPM)モード、4極リラクタンスモータ(4極RM)モードである。
【0026】
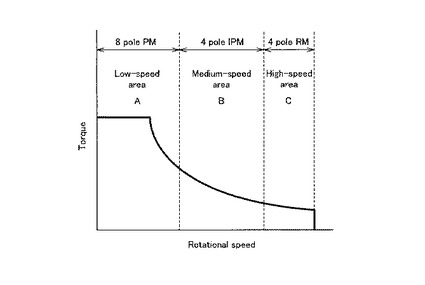
一般に極数変換は誘導回転電機では可能であるが、誘導回転電機は本質的に効率が低くなる。そこで、永久磁石回転電機で極数変換を可能にできれば、広い可変速運転範囲で高効率の運転を期待できる。本実施の形態の3M−PCモータ1の3種類のモードには、磁石トルク主体の8極PMモード、磁石トルクとリラクタンストルクの両方で動作する4極IPMモード、リラクタンストルクのみで動作する4極RMモードがある。図1に示すように運転状態に応じてモードを変更することで回転電機を常に効率の良い領域で運転することができる。起動初期の高トルクを必要とする領域Aでは8極PMモード、中速〜高速度領域Bでは磁石トルクとリラクタンストルクの両方で動作する4極IPMモード、さらに高速から超高速度領域Cではリラクタンストルクのみで動作する4極RMモードで運転することができる。
【0027】
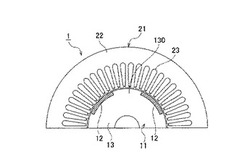
3M−PCモータ1の基本構成を図2に示す。図2はモータ1の半分の断面を示している。3M−PCモータ1の回転子11は、低保磁力磁石12(以下、「可変磁力磁石」と称す)が回転子鉄心13に埋め込まれた構成である。図に示す3M−PCモータ1は、可変磁力磁石12が4個、円周方向に等間隔に配置された構成である。低保磁力の可変磁力磁石12としては、高保磁力の固定磁力磁石であるネオジム磁石よりも低保磁力のもの、例えば、アルニコ磁石、フェライト磁石、サマリウム・コバルト磁石等を使用する。特に、今日、サマリウム・コバルト磁石が最適である。
【0028】
3M−PCモータ1の固定子21は、円筒形の固定子鉄心22の内周面に等間隔に形成されているスロットに電機子巻線23を巻装した構成である。この固定子21の電機子巻線23は、3相交流入力に対して8極と4極に結線を切り替えることができる、一般的な誘導回転電機の極数切替回転電機と同様の仕組みである。
【0029】
巻線の極数変換については、8極では2つのY結線が直列接続で4極では2つのY結線が並列接続の場合、または、8極では2つのY結線が並列接続で4極では2組の巻線が直列になったΔ接続の場合などがあり、回転電機が駆動する装置の運転要求に応じて、極数変換する電機子巻線の接続パターンが適用される。
【0030】
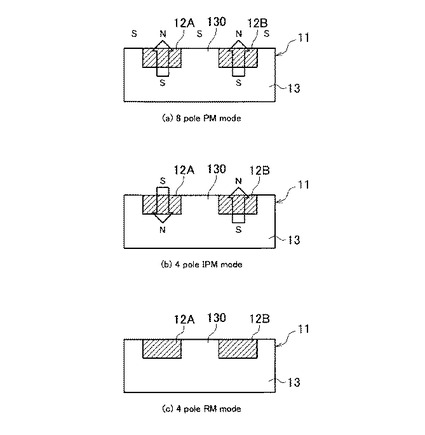
図3はモータ1の半分を模式的に示したものである。図3(a)に示すように、回転子11が8極になる場合(8極PMモード)は、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bと同極(ここではN極)とする。隣り合う磁石12A,12B間の凸鉄心部130には、可変磁力磁石12とは逆の磁極(イメージポール。ここではS極)が形成され、回転子全周では8極である。この8極PMモードにするためには、固定子21側は8極に切り替え、極短時間(例えば、0.01s)の間、通常の運転時の電流よりも数倍、例えば、3倍のパルス状の磁化電流(d軸電機子電流)を流すことにより、全可変磁力磁石12を同時に図3(a)に示す磁化方向に磁化し、その後に運転を開始する。そして、8極PMモードでの運転時には、固定子21側の電機子巻線23の結線を8極に切り替えて運転する。この8極PMモードでは、磁石トルクにより回転力が得られる。
【0031】
図3(b)に示すように、回転子11の極数を8極PMモードから4極IPMモードにする場合、電機子巻線23を4極に切り替えて、極短時間だけパルス状のd軸電機子電流を通電させ、その磁界を用いて回転子11の1つ置きの可変磁力磁石12Aを一方の方向に、そして他方の1つ置きの可変磁力磁石12Bをその逆方向に磁化する。これにより、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bが逆の極性となり、4極IPMモードとなる。この4極IPMモードでの運転時には、固定子21側の電機子巻線23の結線を4極に切り替えて運転する。この4極IPMモードでは、磁石トルクと凸鉄心部130が凸極となるリラクタンストルクとの両方のトルクで回転力が得られる。
【0032】
図3(c)に示すように、4極IPMモードから4極RMモードとする場合、d軸電機子電流でそれぞれの可変磁力磁石12A,12Bに対して逆磁界を発生させて全可変磁力磁石12を消磁させる。この4極RMモードでは、凸鉄心部130が凸極となるリラクタンストルクのみで回転力する。
【0033】
図3(c)に示す回転子11の極数を4極RMモードから同図(b)に示す4極IPMモードに変更する場合、4極巻線接続としてd軸電機子電流でそれぞれの可変磁力磁石12A,12Bに対して4極の磁界を発生させて可変磁力磁石12A,12Bを互いに逆向きに磁化する。
【0034】
さらに、図3(b)に示す回転子11の極数を4極IPMモードから同図(a)に示す8極PMモードとする場合、固定子21を8極に切り替えて、8極のd軸電機子電流による磁界を発生させて可変磁力磁石12を磁化する。
【実施例1】
【0035】
基本的な変換特性の把握と回転電機の可能性を検証するために本発明の回転電機の有限要素法磁界解析を行った。磁石材料は、サマリウム・コバルト磁石である。
【0036】
解析モデルの諸元表を図4に示す。固定子21の直径は100mm、回転子11の直径は51mm、定格電流は3.6Arms、可変磁力永久磁石の保磁力は420kA/m、厚みは2mm、幅は20mmである。
【0037】
この解析で得られた各モード時の磁束密度分布と磁束線を図5〜図7に示してあり、8極と4極が形成されていることがわかる。すなわち、図5(a),(b)の8極PMモードは、可変磁力磁石12と隣接する凸鉄心部分130で2極を形成し、円周全周で8極を形成している。図6(a),(b)の4極IPMモードは、各可変磁力磁石12が1極をなし、円周全周で4極を形成している。そして、図7(a),(b)の4極RMモードの場合、各凸鉄心部130が凸極となり、円周全周で4極を形成している。
【0038】
次に、定格電流3.6[Arms]で電流位相を変化させたときのトルク対電流位相特性を測定したところ、図8のグラフのような結果を得た。8極PMモードの場合の最大トルクは電流位相100deg.で80.7[Nm/m]、4極IPMモードの場合の最大トルクは電流位相124deg.で80.3[Nm/m]、4極RMモードの場合の最大トルクは電流位相136deg.で31.8[Nm/m]となる。電流位相とトルクの関係から各モードに応じて3種のトルクが発生していることが確認でき、いずれも電気自動車に搭載しても動作可能なトルクが得られている。尚、トルクは鉄心長が単位長さ1[m]あたりの値である。
【0039】
図9は、第1の実施の形態の永久磁石回転電機ドライブシステム100の主回路100A及び制御回路100Bを示している。主回路100Aは、直流電源103、直流電力を交流電力に変換するインバータ104、このインバータ104の交流電力にて駆動される3M−PCモータ1にて構成されている。そして、主回路100Aには、モータ電力を検出するための交流電流検出器102、回転子の速度と磁極位置を検出するための速度・位置検出器118が設置されている。3M−PCモータ1の固定子21には、その電機子巻線23の接続極数を8極−4極で切り替える極数切替回路150を備えている。
【0040】
この極数切替回路150は、通常の誘導電動機の極数切替電動機(pole change motor)に採用するものと同様の巻線接続回路で電磁接触器で巻線接続を切り替える。または、パワートランジスタ等のパワースイッチング素子を用いて、複数のコイルと複数のスイッチング素子を接続してスイッチング素子をオン、オフすることによってコイルの直列と並列接続や、ΔやY結線の接続を形成して電子的に巻線切替を行う。さらにスイッチング素子を相数に応じて増加すれば相数も切り替えて運転できる。例えば、永久磁石12の数に対応し、4極では複数の巻線を直列接続したΔ結線から、その2倍の極数の8極に変換する場合は複数の巻線を並列接続したY結線に切り替えることにより、電機子巻線23を4極と8極とに切り替える。当然、並列接続のY結線の4極から直列接続のY結線の8極にする巻線切替など、この例だけでなく他のパターンの巻線接続による極数変換も可能である。この極数切替回路150も、制御回路100Bの指令により極数切替動作をする。
【0041】
制御回路100Bについて説明する。ここでの入力は、運転指令Run*とトルク指令Tm*である。運転指令生成部116は、運転指令Run*と保護判定部117で判断された保護信号PROTとを入力とし、運転状態フラグRunを生成出力する。基本的には、運転指令が入った場合(Run*=1)に、運転状態フラグRunを運転状態(Run=1)にし、運転指令が停止を指示した場合(Run*=0)には、運転状態フラグRunを停止状態(Run=0)にする。さらに、保護検知の場合(PROT=1)には、運転指令Run*=1であっても、運転状態は停止状態Run=0にする。
【0042】
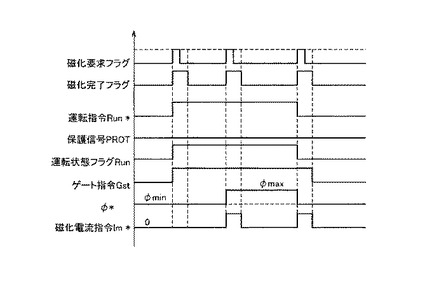
ゲート指令生成部115は、運転状態フラグRunを入力し、インバータ104に内在するスイッチング素子へのゲート指令Gstを生成出力する。このゲート指令生成部115では、運転状態フラグRunが停止(Run=0)から運転(Run=1)に変わる場合、即時にゲートスタート(Gst=1)とし、運転状態フラグRunが運転(Run=1)から停止(Run=0)に変わる場合、所定時間が経過した後に、ゲートオフ(Gst=0)にするように作用する。
【0043】
磁束指令演算部112は、運転状態フラグRunとインバータ周波数ω1、すなわち、ロータ回転周波数ωRを入力として、磁束指令Φ*を出力する。すなわち、運転停止(Run=0)の場合には、磁束指令Φ*を最小Φminにして、運転状態(Run=1)であって、かつ、回転周波数ωRが所定値より低い場合には、磁束指令Φ*を最大Φmaxとし、また、速度が所定値より高い場合、磁束指令Φ*を最小Φminとする。
【0044】
ここに、Φminは可変磁束モータ1として取り得る最小磁束量(>0)、Φmaxは可変磁束モータ1として取り得る最大磁束量、ωAは所定の回転周波数である。尚、磁束量のΦmin,Φmaxの設定については、後で可変磁束制御部113のところで説明する。
【0045】
電流基準演算部111では、トルク指令Tm*と磁束指令Φ*とを入力として、d軸電流基準IdRとq軸電流基準IqRを演算する。
【0046】
磁化要求生成部129の詳細な構成を図10に示す。この図10のブロックは、制御マイコンによって所定時間ごとに制御がなされる。磁束指令Φ*は、前回値の保持部131に入力され、その値が保持される。前回値の保持部131の出力は、前回に記憶した磁束指令Φ*であり、今回の磁束指令値Φ*と共に、変化判定部130に入力される。変化判定部130では、入力2つの変化があった場合には1を、変化がない場合には0を出力する。すなわち、磁束指令Φ*が変化した場合にのみ1が立つ。上記同様な回路を、磁束指令Φ*に代わり、運転状態フラグRunについても有し、前回値の保持部133に入力され、その値が保持される。前回値の保持部133の出力は、前回に記憶した運転状態フラグRunであり、今回の運転状態フラグRunと共に変化判定部134に入力される。2つの変化判定部130,134の出力が論理和演算部(OR)132に入力され、それらの論理和が磁化要求フラグFCreqとして出力される。
【0047】
磁化要求生成部129の出力である磁化要求フラグFCreqは、磁束指令Φ*が変化した場合、あるいは、運転状態フラグRunが変化した場合に磁化要求(FCreq=1)となり、それ以外では要求なし(FCreq=0)となる。尚、運転状態フラグRunが変化する状態とは、インバータが始動するとき、停止するとき、保護で停止するときなどである。また、ここでは磁束指令Φ*を用いているが、後述する可変磁束制御部113の磁化電流指令Im*(磁化電流テーブル127の出力)の変化で磁化要求FCreqを生成してもよい。
【0048】
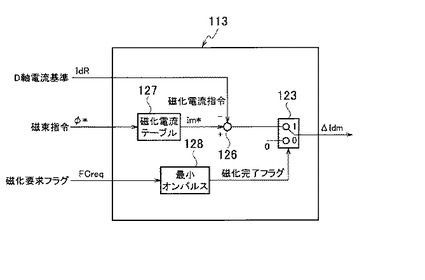
可変磁束制御部113の詳細な構成を図11に示す。可変磁束制御部113は、磁束指令演算部112の出力である磁束指令Φ*を入力し、d軸電流基準IdRを補正するd軸磁化電流差分量ΔIdm*を出力する。
【0049】
可変磁力磁石12を磁化するためには、可変磁力磁石12のBH特性に則り、所定の磁化電流指令Im*を求めればよい。特に、磁化電流指令Im*の大きさは、可変磁石の磁化飽和領域となるように設定する。また、消磁に必要な磁化電流指令Im*も演算する。
【0050】
磁束指令Φ*を入力とし、対応する磁化電流を記憶した磁化電流テーブル127によって、磁束指令Φ*を得るための磁化電流指令Im*を出力する。
【0051】
基本的に、磁石の磁化方向をd軸としているので、磁化電流指令Im*は、d軸電流指令Id*に与えるようにする。本実施の形態では、電流基準演算部111からの出力であるd軸電流基準IdRをd軸磁化電流指令差分ΔIdm*で補正し、d軸電流指令Id*とする構成にしている。
【0052】
一方、磁化要求フラグFCreqは、磁束を切り替えたい要求の際に、少なくとも一瞬、切替要求(FCreq=1)が立つ。磁束を確実に可変とするために、磁化要求フラグFCreqを最小オンパルス器128へと入力する。この出力である磁化完了フラグ(=1:磁化中、=0:磁化完了)は、一旦オン(=1)が入力された場合、所定の時間の間はオフ(=0)にならない機能を有する。所定時間を越えて入力がオン(=1)である場合には、それがオフとなると同時に出力もオフとなる。磁化要求フラグFCregは3M−PCモータ1の極数切替回路150にも出力され、極数切替回路150は電機子巻線23を8極結線から4極結線を切り替える。
【0053】
切替器123には、磁化完了フラグが入力され、磁化中(磁化完了フラグ=1)の場合には減算器126の出力を、磁化完了(磁化完了フラグ=0)の場合には0を出力する。
【0054】
電圧指令演算部110は、以上により生成されたdq軸電流指令Id*,Iq*に基づき、当該指令に一致する電流が流れるように電流制御器を含むdq軸電圧指令Vd*,Vq*を生成する。
【0055】
そして電圧指令演算部110のdq軸電圧指令Vd*,Vq*を、座標変換部105にて3相電圧指令Vu*,Vv*,Vw*に変換し、この3相電圧指令によってPWM回路106がPWMにてゲート信号を生成し、インバータ104をPWM制御する。尚、座標変換部107は電流検出器102の交流検出電流Iu,Iwを2軸dq軸変換してdq軸電流検出値Id,Iqに変換して電圧指令演算部110に入力する。また、擬似微分器108は速度検出器118の信号からインバータ周波数ω1を求める。尚、電圧指令演算部110、座標変換部105,107、PWM回路106には、従来同様の公知技術が採用されている。
【0056】
このように構成された本実施の形態の3M−PCモータ1、そしてそのドライブシステム100の作用を説明する。固定子21の電機子巻線23に通電時間が極短時間(0.1ms〜10ms程度)となるパルス的な電流を流して磁界を形成し、可変磁力磁石12に磁界を作用させる。但し、回転電機の巻線インダクタンスの大きさや電流波形により通電時間は変わる。永久磁石を磁化するための磁界を形成するパルス電流は固定子21の電機子巻線23のd軸電流成分とする。
【0057】
(1)8極PMモード:
始動時や急角度の段差部分を乗り越える場合、低速度、大トルクが必要であるので、8極PMモードに切り替え、固定子21の電機子巻線23も8極に切り替える。この場合、電機子巻線23に所定の磁化電流を流し、全可変磁力磁石12を同一方向に磁化させる。これにより、図3(a)に示す8極PMモードなる。
【0058】
(2)4極IPMモード:
回転速度が所定の低速度領域を超えた時に、回転子11の極数を8極PMモードから4極IPMモードに切り替える。この場合、電機子巻線23を4極に切り替え、極短時間だけパルス状のd軸電機子電流を流し、その磁界を用いて回転子11の可変磁力磁石12Aだけを逆方向に磁化させる。これにより、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bが逆極性となり、4極となる。そして、図3(b)に示すように、凸鉄心部130には磁極は現れないので、この部分が凸極となり、4極永久磁石トルクと4極リラクタンストルクが同時に得られる4極IPMモードとなる。
【0059】
このとき、全鎖交磁束数と周波数が下がるので、モータ電圧が下がる。この結果、電源電圧の上限値に対して余裕ができ、回転速度(周波数)を高くすることができる。
【0060】
(3)4極RMモード:
回転速度が所定の中速度領域を超えて高速度領域に入った時には、d軸電機子電流で逆磁界を発生させて全可変磁力磁石12を消磁させ、回転子鉄心13の凸鉄心部130が磁気的な凸極となり、リラクタンストルクだけで回転する4極RMモードに移行する。
【0061】
これにより、モータ電圧が最小となるので回転速度(周波数)を最高値まで上げることができる。
【0062】
このようにして、本実施の形態の3M−PMモータ1では、磁石トルク主体の8極PMモード、磁石トルクとリラクタンストルクの両方で動作する4極IPMモード、リラクタンストルクのみで動作する4極RMモードの3種類の運転モードを速度領域に応じて切り替えることにより、極数変換を可能にして広い可変速運転範囲で高効率の運転ができる。
【0063】
[第2の実施の形態]
3M−PCモータは、基本的には、極性が反転する永久磁石は片方のみでよいので、RMモードを使用しない場合は、図13に示す2M−PCモータ1Aのように、固定磁力磁石14と可変磁力磁石12の組合せも可能である。低保磁力の可変磁力磁石12には、例えば、アルニコ磁石、フェライト磁石、サマリウム・コバルト磁石などを採用する。そして、固定磁力磁石14には、高保磁力磁石としてネオジム磁石を採用する。尚、これらの組み合わせは限定されるものではないが、磁化制御において可変磁力磁石12は極短時間かけられる磁界により増磁あるいは減磁し、固定磁力磁石14はその磁界によっては磁力をほとんど変化させない特性の磁石を選択する。
【0064】
この2M−PCモータ1Aでは、第1の実施の形態における(1)、(2)の切り替え制御により広い速度範囲での可変速運転ができる。ドライブシステムも簡略化できる。
【0065】
尚、上記第1、第2の実施の形態の永久磁石回転電機については、8極−4極の切り替えができる3M−PCモータを例示したが、これに限定されるものではなく、可変磁力磁石12の挿入個数により、4極−2極、6極−3極、12極−6極、16極−8極等の組み合わせも可能である。
【0066】
[第3の実施の形態]
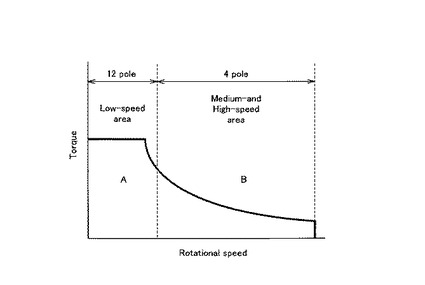
本実施の形態は、回転子磁石の磁化を直接的に変えて極数を変換することで、広い速度範囲で可変速運転できる12極−4極の極数変換モータ1Bである。
【0067】
12極−4極の極数変換永久磁石回転電機(以下、「12/4PCPMモータ」と称す。)は、低保磁力の磁石(以下、「可変磁力磁石」と称す。)の磁化を直接変えることにより回転子の極数を12極と4極に変換し、図14における高トルク、低速度領域Aでは12極、中高速度領域Bでは4極にすることで、広範囲の可変速運転を可能とする。モータは12極にした場合、PMモータとして動作し、4極にした場合はIPMモータとして動作する2種類のトルク発生モードを持つモータでもある。高保磁力の固定磁力磁石と低保磁力の可変磁力磁石の両方を用いることによって、可変磁力磁石のみの場合よりも高トルク化ができる。例えば、低保磁力の可変磁力磁石12には、例えば、アルニコ磁石、フェライト磁石あるいはサマリウム・コバルト磁石などを採用する。そして、高保磁力の固定磁力磁石14としては、ネオジム磁石を採用する。
【0068】
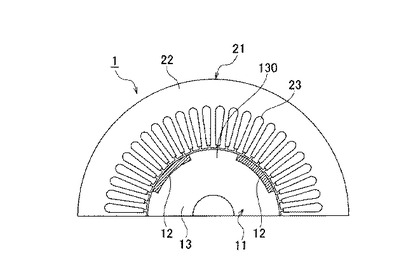
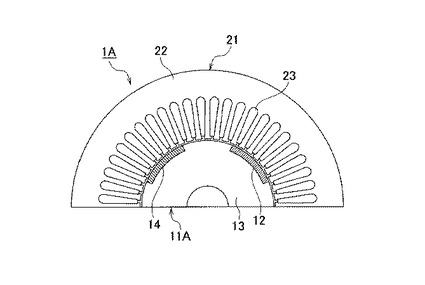
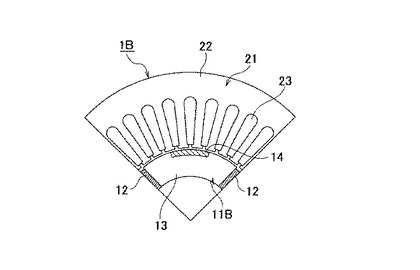
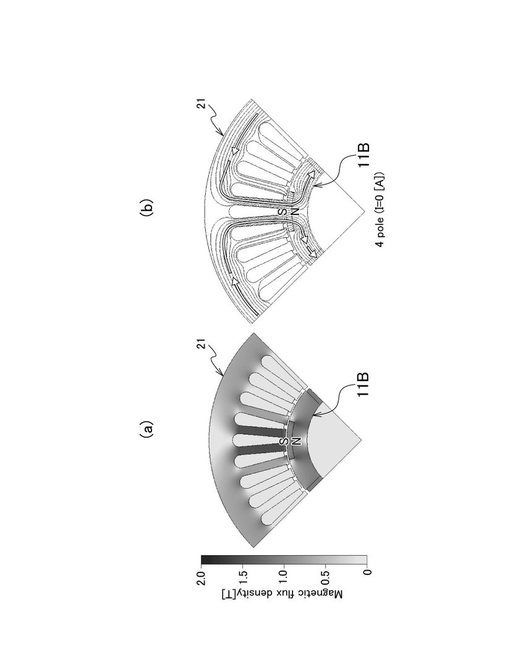
図15に、本実施の形態の12/4PCPMモータ1B(全周の1/4モデル)の構成を示している。12/4PCPMモータ1Bの回転子11Bは、半径方向に長く、回転方向が磁化方向である可変磁力磁石12と、円周方向に長く、半径方向が磁化方向である固定磁力磁石14を回転子鉄心13に等角度ずつ離して埋め込んだ構造である。
【0069】
この12/4PCPMモータ1Bは、固定磁力磁石14と可変磁力磁石12の磁化状態で極数を変換できる磁気構成である。固定子21の構成は、第1の実施の形態と同様であり、電機子巻線23の結線を切り替えることにより極数の切替ができる極数切替回転電機のものを採用する。
【0070】
本実施の形態の12/4PCPMモータ1Bでは、電機子巻線23に極短時間のパルス状のd軸電機子電流を流すことにより生じる磁界を用いて、回転子11Bの可変磁力磁石12を磁化することにより、回転子11Bの極数を変換する。
【0071】
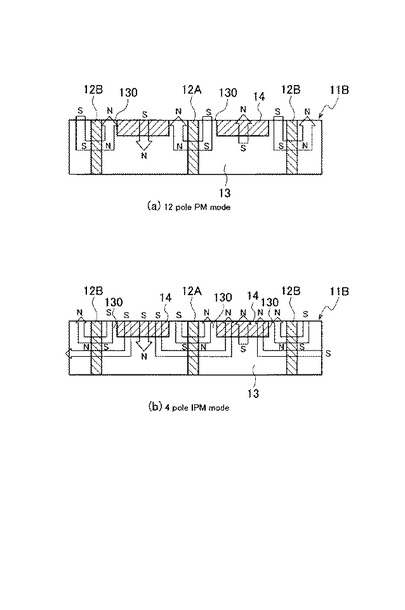
極数変換の動作について、図16の1/2回転子モデルの模式図を用いて説明する。回転子11Bが12極の磁気構成は、図16(a)に示すようになり、可変磁力磁石12と固定磁力磁石14との間の回転子鉄心13の表面に固定磁力磁石14と反対の極が形成される。これより1/2モデルで6極が形成されることになり、全周で12極となる。
【0072】
次に回転子11Bの極数を12極から4極とする場合を述べる。固定子21の電機子巻線23は12極から4極に接続を変え、正のd軸電機子電流による増磁界により可変磁力磁石12の磁化方向を変える。図16(b)に示すように、可変磁力磁石12と固定磁力磁石14との磁化方向は磁気的に同一方向にする。固定磁力磁石14を主とするN極が形成され、1/2モデルで2極となる。全周では4極となる。
【0073】
逆に回転子11Bの極数を4極から12極とする場合、電機子巻線23を4極巻線接続における負のd軸電流で磁界を発生させ、可変磁力磁石12の磁化方向を反転させる。
【0074】
この12/4PCPMモータ1Bに対するドライブシステムは、第1の実施の形態と同様であり、図9〜図12に示すものが採用できる。
【0075】
(1)12極PMモード:
始動時や急角度の段差部分を乗り越える場合、低速度、大トルクが必要であるので、12極PMモードに切り替え、固定子21の電機子巻線23も12極に切り替える。この場合、電機子巻線23に所定の磁化電流を流し、可変磁力磁石12Aと可変磁力磁石12Bを磁化して、固定磁力磁石14の内側面、固定磁力磁石14と隣り合う可変磁力磁石12の向き合う面が共にN極又はS極で同極となる。これにより、図16(a)に示す12極PMモードなる。
【0076】
(2)4極IPMモード:
回転速度が所定の低速度領域を超えた時に、回転子11の極数を12極PMモードから4極IPMモードに切り替える。この場合、電機子巻線23を4極に切り替え、極短時間だけパルス状のd軸電機子電流を流し、その磁界を用いて回転子11の可変磁力磁石12Aと可変磁力磁石12Bも磁化する。磁化は、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bは同極性、そして固定磁力磁石14とは逆極性となるような方向に作用させる。これにより、可変磁力磁石12Aと12Bと固定磁力磁石14で一つの磁極を形成することになり、全周で4極となる。同時に、固定磁力磁石14に隣接する凸鉄心部130は磁気的に凸極となる。これにより、4極磁石トルクと4極リラクタンストルクとの両方のトルクで回転力を生む4極IPMモードとなる。
【0077】
そして、この4極IPMモードのとき、全鎖交磁束数と周波数が下がるので、モータ電圧が下がる。この結果、電源電圧の上限値に対して余裕ができ、回転速度(周波数)を高くすることができ、高速回転が可能となる。
【実施例2】
【0078】
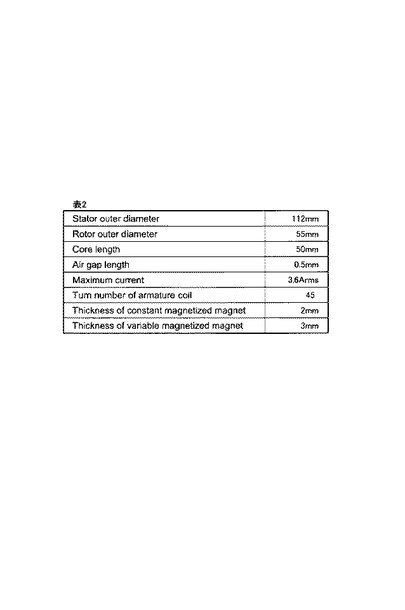
本発明の回転電機の基本的な変換特性の把握とモータの可能性を検証するために有限要素法磁界解析を行った。解析モデルの諸元表を図17に示す。固定子21の直径は112mm、回転子11Bの直径は55mm、鉄心長は50mm、最大電流は3.6Arms、電機子巻線23の巻数は45、固定磁力磁石14の厚みは2mm、可変磁力磁石12の厚みは3mmである。
【0079】
極数変換におけるモータの永久磁石による磁束密度分布と磁束線を図18、図19に示す。回転子11Bの可変磁力磁石12の極性反転により、図18(a),(b)の1/4コアでは3極が形成されていることから、全周で12極であり、図19(a),(b)では1極なので全周では4極に極数変換できることが確認できた。
【0080】
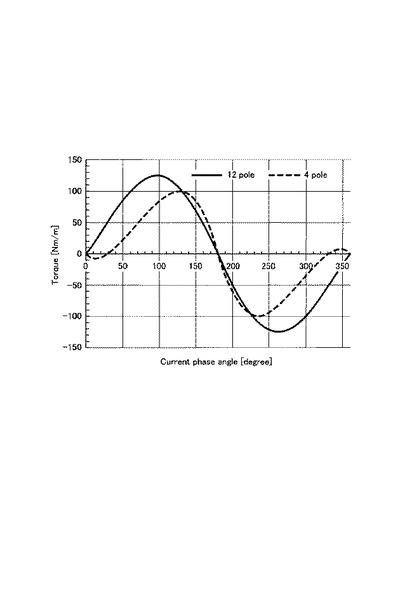
次に、定格電流3.6[Arms]で電流位相を変化させたときのトルク特性の解析値を図20に示す。尚、トルクは鉄心長が単位長さ(1m)当りの値である。12極の場合の最大トルクは電流位相96degreeで発生し、126(Nm/m)である。4極の最大トルクは電流位相126degreeで発生し、97.8(Nm/m)である。解析モデルでは、12極のトルクが4極より約30%高くなっており、回転電機としていずれも十分なトルクを発生できている。また、図20の最大トルクの電流位相から、12極の場合はほぼ磁石トルクのみで動作し、4極の場合はリラクタンストルクと磁石トルクの両方で動作することが確認された。
【0081】
このように、本実施の形態によれば、可変磁力永久磁石12の磁化を直接変化させて回転子11Bの極数を変換することにより、広い可変速運転を可能とする12極−4極の極数変換の永久磁石回転電機が実現できる。また、可変磁力磁石12のみ磁化を反転させるだけで極数を変換することができ、また十分なトルクも得られる。
【0082】
本実施の形態の永久磁石回転電機にあっても、上記の12極−4極のPCPMモータに限らず、6極−2極のPCPMモータを得ることもできる。
【符号の説明】
【0083】
A 低速度大トルク領域
B 中速度領域
C 高速度領域
1 3M−PCモータ
1A 2M−PCモータ
1B 12/4PCPMモータ
11,11A,11B 回転子
12,12A,12B 可変磁力磁石
13 回転子鉄心
14 固定磁力磁石
21 固定子
22 固定子鉄心
23 電機子巻線
130 凸鉄心部
100 ドライブシステム
100A 主回路
100B 制御回路
104 PWMインバータ
113 可変磁束制御部
129 磁化要求生成部
150 極数切替回路
【技術分野】
【0001】
本発明は、複数の極数と複数種のトルク発生モードを変更できるモード・極数可変な永久磁石回転電機及びその運転方法に関する。
【背景技術】
【0002】
環境問題や世界的なエネルギー消費量の増加の改善にはシステムの省エネルギー化が効果的である。電気自動車、電車、エレベータ、家電機器では高出力で高効率を得るために非特許文献1,2に記載されているような永久磁石回転電機が適用されている。しかし、永久磁石回転電機は可変速運転では弱め磁束制御を用いるため、中〜高速度領域や軽負荷時に効率が低下することや電圧制限下で広い可変速運転が困難であることなどの問題がある。そこで、非特許文献3〜6に記載されているような回転電機内の永久磁石の磁力を変化させて駆動する新概念の永久磁石回転電機(「メモリモータ」と称されている。)が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−72021号公報
【特許文献2】特開2009−201300号公報
【特許文献3】特開2010−004673号公報
【非特許文献】
【0004】
【非特許文献1】K.Sakai, T.Takahashi, EShimomura, M.Arata, Y.Nakazawa and T.Tajima: ”Development of permanent magnet reluctance motor suitable for variable-speed drive for electric vehicle”, T.IEE Japan, Vol.123-D, No.6, pp681-688 (2003).
【非特許文献2】K.Sakai, K.Hagiwara and Y.Hirano, ”High-power and high-efficiency permanent magnet reluctance motor for hybrid electric vehicle”, TOSHIBA REVIEW, Vol.60, No.11,pp.41-44 (2005).
【非特許文献3】K.Sakai, K.Yuki, Y.Hashiba, N.Takahashi, K.Yasui and L.Kovudhikulrungsri: “Principle and Basic Characteristics of Variable-Magnetic-Force Memory Motors”, IEEJ Trans. IA, Vol. 131, No. 1, pp.53-60 (2011).
【非特許文献4】K.Sakai, K.Yuki, D.Misu, N.Takahashi, Y.Hashiba, Y.Matsuoka and Y.Otsubo: ”Variable-magnetic-force motor assisted by reluctance torque”, 2010 National Convention Record, IEEJ, 5-012 (2010).
【非特許文献5】V.Ostovic, “Memory motors”, IEEE Industry Applications Magazine, Jan/feb., pp.52-61 (2003).
【非特許文献6】V.Ostovic, “Pole-changing permanent-magnet machines”, IEEE Transactions on Industry Applications, Vol.38, No.6 pp.1493-1499 (2002).
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、理想の可変速回転電機を目指して、高速時の永久磁石がもたらす誘導起電力の低減と低速時の高トルク発生の二律背反する特性を可能とするために、複数の極数と複数種のトルク発生モードを使い分けて駆動できる永久磁石回転電機及びその運転方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1つの特徴は、回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備え、前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石それぞれを半径方向で同一の向きに着磁し、磁石トルク主体の2n極のPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作するn極IPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態とし、前記2n極PMモード状態、n極IPMモード状態及びn極RMモード状態の間で相互にモード状態を切り替えて2n極PMモード、n極IPMモード及びn極RMモードのいずれでも運転できる永久磁石回転電機である。
【0007】
本発明の別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が半径方向で同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0008】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0009】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が半径方向で同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0010】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が半径方向で同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0011】
尚、上記の永久磁石回転電機では、回転子の極数変換の主要な変換パターンを述べたが、可変磁力磁石と固定磁力磁石を組合せて磁極を構成する場合は、可変磁力磁石の磁化による回転子の極数変換では電機子巻線の極数は2m極と4m極いずれでも可能である。したがって、電機子巻線の極数2m極と4m極による可変磁力磁石の磁化は上に述べた以外のパターンでも可能である。
【0012】
本発明のまた別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN極若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0013】
本発明のまた別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で永久磁石の磁極がN極若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機である。
【0014】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の2n極のPMモード状態にし、前記電機子巻線の結線は2n極の接続で通常の運転電流を通電することにより2n極PMモードで運転し、中速度領域では、前記電機子巻線をn極に切り替えて所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作するn極IPMモード状態にし、前記電機子巻線の結線はn極の接続で通常の運転電流を通電することによりn極IPMモードで運転し、高速度領域では、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態にし、前記電機子巻線の結線はn極の接続で通常の運転電流を通電することによりn極RMモードで運転する永久磁石回転電機の運転方法である。
【0015】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線の結線は4m極の接続で通常の運転電流を通電することにより4m極PMモードで運転し、中〜高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線は2m極の接続で通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0016】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線の結線は4m極に接続切替し、通常の運転電流を通電することにより4m極PMモードで運転し、中〜高速度領域では、前記電機子巻線の結線を2m極に接続切替して所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線は2m極の接続で通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0017】
本発明のまた別の特徴は、回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線の結線は4m極の接続で通常の運転電流を通電することにより4m極PMモードで運転し、中〜高速度領域では、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極に接続切替して、通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0018】
尚、上記の永久磁石回転電機の運転方法でも、回転子の極数変換の主要な変換パターンを述べたが、可変磁力磁石と固定磁力磁石を組合せて磁極を構成する場合は、可変磁力磁石の磁化による回転子の極数変換では電機子巻線の極数は2m極と4m極いずれでも可能である。したがって、電機子巻線の極数2m極と4m極による可変磁力磁石の磁化は上に述べた以外のパターンでも可能である。
【0019】
本発明のまた別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線は6m極の接続で通常の運転電流を通電することにより6m極PMモードで運転し、中速〜高速度領域では、前記電機子巻線を2m極に切り替えて所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線を2m極に切り替え、通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0020】
本発明のさらに別の特徴は、回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線を6m極に切り替え、通常の運転電流を通電することにより6m極PMモードで運転し、中速〜高速度領域では、前記電機子巻線を2m極に切り替えて所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線は2m極の接続で通常の運転電流を通電することにより2m極IPMモードで運転する永久磁石回転電機の運転方法である。
【0021】
尚、上に述べた電機子巻線の切替は主に2つの方法がある。1つは、従来の極数変換と同様に複数のコイルと電磁接触器と接続して、電磁接触器で機械的に切り替える方法である。もう1つは、パワートランジスタ等のスイッチングパワー素子を用いて、複数のコイルと複数のスイッチング素子を接続し、スイッチング素子で電子的にコイルの接続を切り替えて行う方法である。
【発明の効果】
【0022】
本発明によれば、速度領域に対応してふさわしい極数とトルク発生モードに変更して可変速運転することができ、高速時の誘導起電力の低減と低速時の高トルク発生の二律背反する回転電機特性を出すことができる永久磁石回転電機が実現できる。
【図面の簡単な説明】
【0023】
【図1】第1の実施の形態の3M−PCモータの速度、トルクとモードとの対応図。
【図2】第1の実施の形態の3M−PCモータの半分の断面図。
【図3】第1の実施の形態の3M−PCモータのモード別の可変磁力磁石の着磁状態、着磁方向と極数、トルク発生モードの説明図。
【図4】実施例1の3M−PCモータの諸元表1。
【図5】実施例1の3M−PCモータの8極永久磁石モータ(8極PM)モードでの磁束密度の分布と磁束分布を示す断面図。
【図6】実施例1の3M−PCモータの4極埋め込み磁石モータ(4極IPM)モードでの磁束密度の分布と磁束分布を示す断面図。
【図7】実施例1の3M−PCモータの4極リラクタンスモータ(4極RM)モードでの磁束密度の分布と磁束分布を示す断面図。
【図8】実施例1の3M−PCモータの各モードでのトルク−電流特性のグラフ。
【図9】第1の実施の形態の3M−PCモータのドライブシステムのブロック図。
【図10】上記ドライブシステムにおける磁化要求生成部の内部構成のブロック図。
【図11】上記ドライブシステムにおける可変磁束制御部の内部構成のブロック図。
【図12】上記ドライブシステムによる電動機制御のタイミングチャート。
【図13】第2の実施の形態の2M−PCモータの半分の断面図。
【図14】第2の実施の形態の2M−PCモータの速度、トルクとモードとの対応図。
【図15】第3の実施の形態の12/4PCPMモータの1/4の断面図。
【図16】第3の実施の形態の12/4PCPMモータのモード別の可変磁力の着磁状態、着磁方向と極数、トルク発生モードの説明図。
【図17】実施例2の12/4PCPMモータの諸元表2。
【図18】実施例2の12/4PCPMモータの12極永久磁石モータ(12極PM)モードでの磁束密度、磁束分布を示す断面図。
【図19】実施例2の12/4PCPMモータの4極埋め込み磁石モータ(4極IPM)モードでの磁束密度、磁束分布を示す断面図。
【図20】実施例2の12/4PCPMモータのモード別のトルク−電流特性のグラフ。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態を図に基づいて詳説する。
【0025】
[第1の実施の形態]
第1の実施の形態の永久磁石回転電機は、極数変換ができ、3種類のトルク発生モードで動作できる3M−PCモータ1である。3M−PCモータ1は、可変磁力磁石の磁化方向を変えたり消磁したりすることにより永久磁石回転電機で極数変換と共にトルク発生モードを変更して3種類のモードで動作できる。すなわち、8極永久磁石モータ(8極PM)モード、4極埋め込み磁石モータ(4極IPM)モード、4極リラクタンスモータ(4極RM)モードである。
【0026】
一般に極数変換は誘導回転電機では可能であるが、誘導回転電機は本質的に効率が低くなる。そこで、永久磁石回転電機で極数変換を可能にできれば、広い可変速運転範囲で高効率の運転を期待できる。本実施の形態の3M−PCモータ1の3種類のモードには、磁石トルク主体の8極PMモード、磁石トルクとリラクタンストルクの両方で動作する4極IPMモード、リラクタンストルクのみで動作する4極RMモードがある。図1に示すように運転状態に応じてモードを変更することで回転電機を常に効率の良い領域で運転することができる。起動初期の高トルクを必要とする領域Aでは8極PMモード、中速〜高速度領域Bでは磁石トルクとリラクタンストルクの両方で動作する4極IPMモード、さらに高速から超高速度領域Cではリラクタンストルクのみで動作する4極RMモードで運転することができる。
【0027】
3M−PCモータ1の基本構成を図2に示す。図2はモータ1の半分の断面を示している。3M−PCモータ1の回転子11は、低保磁力磁石12(以下、「可変磁力磁石」と称す)が回転子鉄心13に埋め込まれた構成である。図に示す3M−PCモータ1は、可変磁力磁石12が4個、円周方向に等間隔に配置された構成である。低保磁力の可変磁力磁石12としては、高保磁力の固定磁力磁石であるネオジム磁石よりも低保磁力のもの、例えば、アルニコ磁石、フェライト磁石、サマリウム・コバルト磁石等を使用する。特に、今日、サマリウム・コバルト磁石が最適である。
【0028】
3M−PCモータ1の固定子21は、円筒形の固定子鉄心22の内周面に等間隔に形成されているスロットに電機子巻線23を巻装した構成である。この固定子21の電機子巻線23は、3相交流入力に対して8極と4極に結線を切り替えることができる、一般的な誘導回転電機の極数切替回転電機と同様の仕組みである。
【0029】
巻線の極数変換については、8極では2つのY結線が直列接続で4極では2つのY結線が並列接続の場合、または、8極では2つのY結線が並列接続で4極では2組の巻線が直列になったΔ接続の場合などがあり、回転電機が駆動する装置の運転要求に応じて、極数変換する電機子巻線の接続パターンが適用される。
【0030】
図3はモータ1の半分を模式的に示したものである。図3(a)に示すように、回転子11が8極になる場合(8極PMモード)は、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bと同極(ここではN極)とする。隣り合う磁石12A,12B間の凸鉄心部130には、可変磁力磁石12とは逆の磁極(イメージポール。ここではS極)が形成され、回転子全周では8極である。この8極PMモードにするためには、固定子21側は8極に切り替え、極短時間(例えば、0.01s)の間、通常の運転時の電流よりも数倍、例えば、3倍のパルス状の磁化電流(d軸電機子電流)を流すことにより、全可変磁力磁石12を同時に図3(a)に示す磁化方向に磁化し、その後に運転を開始する。そして、8極PMモードでの運転時には、固定子21側の電機子巻線23の結線を8極に切り替えて運転する。この8極PMモードでは、磁石トルクにより回転力が得られる。
【0031】
図3(b)に示すように、回転子11の極数を8極PMモードから4極IPMモードにする場合、電機子巻線23を4極に切り替えて、極短時間だけパルス状のd軸電機子電流を通電させ、その磁界を用いて回転子11の1つ置きの可変磁力磁石12Aを一方の方向に、そして他方の1つ置きの可変磁力磁石12Bをその逆方向に磁化する。これにより、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bが逆の極性となり、4極IPMモードとなる。この4極IPMモードでの運転時には、固定子21側の電機子巻線23の結線を4極に切り替えて運転する。この4極IPMモードでは、磁石トルクと凸鉄心部130が凸極となるリラクタンストルクとの両方のトルクで回転力が得られる。
【0032】
図3(c)に示すように、4極IPMモードから4極RMモードとする場合、d軸電機子電流でそれぞれの可変磁力磁石12A,12Bに対して逆磁界を発生させて全可変磁力磁石12を消磁させる。この4極RMモードでは、凸鉄心部130が凸極となるリラクタンストルクのみで回転力する。
【0033】
図3(c)に示す回転子11の極数を4極RMモードから同図(b)に示す4極IPMモードに変更する場合、4極巻線接続としてd軸電機子電流でそれぞれの可変磁力磁石12A,12Bに対して4極の磁界を発生させて可変磁力磁石12A,12Bを互いに逆向きに磁化する。
【0034】
さらに、図3(b)に示す回転子11の極数を4極IPMモードから同図(a)に示す8極PMモードとする場合、固定子21を8極に切り替えて、8極のd軸電機子電流による磁界を発生させて可変磁力磁石12を磁化する。
【実施例1】
【0035】
基本的な変換特性の把握と回転電機の可能性を検証するために本発明の回転電機の有限要素法磁界解析を行った。磁石材料は、サマリウム・コバルト磁石である。
【0036】
解析モデルの諸元表を図4に示す。固定子21の直径は100mm、回転子11の直径は51mm、定格電流は3.6Arms、可変磁力永久磁石の保磁力は420kA/m、厚みは2mm、幅は20mmである。
【0037】
この解析で得られた各モード時の磁束密度分布と磁束線を図5〜図7に示してあり、8極と4極が形成されていることがわかる。すなわち、図5(a),(b)の8極PMモードは、可変磁力磁石12と隣接する凸鉄心部分130で2極を形成し、円周全周で8極を形成している。図6(a),(b)の4極IPMモードは、各可変磁力磁石12が1極をなし、円周全周で4極を形成している。そして、図7(a),(b)の4極RMモードの場合、各凸鉄心部130が凸極となり、円周全周で4極を形成している。
【0038】
次に、定格電流3.6[Arms]で電流位相を変化させたときのトルク対電流位相特性を測定したところ、図8のグラフのような結果を得た。8極PMモードの場合の最大トルクは電流位相100deg.で80.7[Nm/m]、4極IPMモードの場合の最大トルクは電流位相124deg.で80.3[Nm/m]、4極RMモードの場合の最大トルクは電流位相136deg.で31.8[Nm/m]となる。電流位相とトルクの関係から各モードに応じて3種のトルクが発生していることが確認でき、いずれも電気自動車に搭載しても動作可能なトルクが得られている。尚、トルクは鉄心長が単位長さ1[m]あたりの値である。
【0039】
図9は、第1の実施の形態の永久磁石回転電機ドライブシステム100の主回路100A及び制御回路100Bを示している。主回路100Aは、直流電源103、直流電力を交流電力に変換するインバータ104、このインバータ104の交流電力にて駆動される3M−PCモータ1にて構成されている。そして、主回路100Aには、モータ電力を検出するための交流電流検出器102、回転子の速度と磁極位置を検出するための速度・位置検出器118が設置されている。3M−PCモータ1の固定子21には、その電機子巻線23の接続極数を8極−4極で切り替える極数切替回路150を備えている。
【0040】
この極数切替回路150は、通常の誘導電動機の極数切替電動機(pole change motor)に採用するものと同様の巻線接続回路で電磁接触器で巻線接続を切り替える。または、パワートランジスタ等のパワースイッチング素子を用いて、複数のコイルと複数のスイッチング素子を接続してスイッチング素子をオン、オフすることによってコイルの直列と並列接続や、ΔやY結線の接続を形成して電子的に巻線切替を行う。さらにスイッチング素子を相数に応じて増加すれば相数も切り替えて運転できる。例えば、永久磁石12の数に対応し、4極では複数の巻線を直列接続したΔ結線から、その2倍の極数の8極に変換する場合は複数の巻線を並列接続したY結線に切り替えることにより、電機子巻線23を4極と8極とに切り替える。当然、並列接続のY結線の4極から直列接続のY結線の8極にする巻線切替など、この例だけでなく他のパターンの巻線接続による極数変換も可能である。この極数切替回路150も、制御回路100Bの指令により極数切替動作をする。
【0041】
制御回路100Bについて説明する。ここでの入力は、運転指令Run*とトルク指令Tm*である。運転指令生成部116は、運転指令Run*と保護判定部117で判断された保護信号PROTとを入力とし、運転状態フラグRunを生成出力する。基本的には、運転指令が入った場合(Run*=1)に、運転状態フラグRunを運転状態(Run=1)にし、運転指令が停止を指示した場合(Run*=0)には、運転状態フラグRunを停止状態(Run=0)にする。さらに、保護検知の場合(PROT=1)には、運転指令Run*=1であっても、運転状態は停止状態Run=0にする。
【0042】
ゲート指令生成部115は、運転状態フラグRunを入力し、インバータ104に内在するスイッチング素子へのゲート指令Gstを生成出力する。このゲート指令生成部115では、運転状態フラグRunが停止(Run=0)から運転(Run=1)に変わる場合、即時にゲートスタート(Gst=1)とし、運転状態フラグRunが運転(Run=1)から停止(Run=0)に変わる場合、所定時間が経過した後に、ゲートオフ(Gst=0)にするように作用する。
【0043】
磁束指令演算部112は、運転状態フラグRunとインバータ周波数ω1、すなわち、ロータ回転周波数ωRを入力として、磁束指令Φ*を出力する。すなわち、運転停止(Run=0)の場合には、磁束指令Φ*を最小Φminにして、運転状態(Run=1)であって、かつ、回転周波数ωRが所定値より低い場合には、磁束指令Φ*を最大Φmaxとし、また、速度が所定値より高い場合、磁束指令Φ*を最小Φminとする。
【0044】
ここに、Φminは可変磁束モータ1として取り得る最小磁束量(>0)、Φmaxは可変磁束モータ1として取り得る最大磁束量、ωAは所定の回転周波数である。尚、磁束量のΦmin,Φmaxの設定については、後で可変磁束制御部113のところで説明する。
【0045】
電流基準演算部111では、トルク指令Tm*と磁束指令Φ*とを入力として、d軸電流基準IdRとq軸電流基準IqRを演算する。
【0046】
磁化要求生成部129の詳細な構成を図10に示す。この図10のブロックは、制御マイコンによって所定時間ごとに制御がなされる。磁束指令Φ*は、前回値の保持部131に入力され、その値が保持される。前回値の保持部131の出力は、前回に記憶した磁束指令Φ*であり、今回の磁束指令値Φ*と共に、変化判定部130に入力される。変化判定部130では、入力2つの変化があった場合には1を、変化がない場合には0を出力する。すなわち、磁束指令Φ*が変化した場合にのみ1が立つ。上記同様な回路を、磁束指令Φ*に代わり、運転状態フラグRunについても有し、前回値の保持部133に入力され、その値が保持される。前回値の保持部133の出力は、前回に記憶した運転状態フラグRunであり、今回の運転状態フラグRunと共に変化判定部134に入力される。2つの変化判定部130,134の出力が論理和演算部(OR)132に入力され、それらの論理和が磁化要求フラグFCreqとして出力される。
【0047】
磁化要求生成部129の出力である磁化要求フラグFCreqは、磁束指令Φ*が変化した場合、あるいは、運転状態フラグRunが変化した場合に磁化要求(FCreq=1)となり、それ以外では要求なし(FCreq=0)となる。尚、運転状態フラグRunが変化する状態とは、インバータが始動するとき、停止するとき、保護で停止するときなどである。また、ここでは磁束指令Φ*を用いているが、後述する可変磁束制御部113の磁化電流指令Im*(磁化電流テーブル127の出力)の変化で磁化要求FCreqを生成してもよい。
【0048】
可変磁束制御部113の詳細な構成を図11に示す。可変磁束制御部113は、磁束指令演算部112の出力である磁束指令Φ*を入力し、d軸電流基準IdRを補正するd軸磁化電流差分量ΔIdm*を出力する。
【0049】
可変磁力磁石12を磁化するためには、可変磁力磁石12のBH特性に則り、所定の磁化電流指令Im*を求めればよい。特に、磁化電流指令Im*の大きさは、可変磁石の磁化飽和領域となるように設定する。また、消磁に必要な磁化電流指令Im*も演算する。
【0050】
磁束指令Φ*を入力とし、対応する磁化電流を記憶した磁化電流テーブル127によって、磁束指令Φ*を得るための磁化電流指令Im*を出力する。
【0051】
基本的に、磁石の磁化方向をd軸としているので、磁化電流指令Im*は、d軸電流指令Id*に与えるようにする。本実施の形態では、電流基準演算部111からの出力であるd軸電流基準IdRをd軸磁化電流指令差分ΔIdm*で補正し、d軸電流指令Id*とする構成にしている。
【0052】
一方、磁化要求フラグFCreqは、磁束を切り替えたい要求の際に、少なくとも一瞬、切替要求(FCreq=1)が立つ。磁束を確実に可変とするために、磁化要求フラグFCreqを最小オンパルス器128へと入力する。この出力である磁化完了フラグ(=1:磁化中、=0:磁化完了)は、一旦オン(=1)が入力された場合、所定の時間の間はオフ(=0)にならない機能を有する。所定時間を越えて入力がオン(=1)である場合には、それがオフとなると同時に出力もオフとなる。磁化要求フラグFCregは3M−PCモータ1の極数切替回路150にも出力され、極数切替回路150は電機子巻線23を8極結線から4極結線を切り替える。
【0053】
切替器123には、磁化完了フラグが入力され、磁化中(磁化完了フラグ=1)の場合には減算器126の出力を、磁化完了(磁化完了フラグ=0)の場合には0を出力する。
【0054】
電圧指令演算部110は、以上により生成されたdq軸電流指令Id*,Iq*に基づき、当該指令に一致する電流が流れるように電流制御器を含むdq軸電圧指令Vd*,Vq*を生成する。
【0055】
そして電圧指令演算部110のdq軸電圧指令Vd*,Vq*を、座標変換部105にて3相電圧指令Vu*,Vv*,Vw*に変換し、この3相電圧指令によってPWM回路106がPWMにてゲート信号を生成し、インバータ104をPWM制御する。尚、座標変換部107は電流検出器102の交流検出電流Iu,Iwを2軸dq軸変換してdq軸電流検出値Id,Iqに変換して電圧指令演算部110に入力する。また、擬似微分器108は速度検出器118の信号からインバータ周波数ω1を求める。尚、電圧指令演算部110、座標変換部105,107、PWM回路106には、従来同様の公知技術が採用されている。
【0056】
このように構成された本実施の形態の3M−PCモータ1、そしてそのドライブシステム100の作用を説明する。固定子21の電機子巻線23に通電時間が極短時間(0.1ms〜10ms程度)となるパルス的な電流を流して磁界を形成し、可変磁力磁石12に磁界を作用させる。但し、回転電機の巻線インダクタンスの大きさや電流波形により通電時間は変わる。永久磁石を磁化するための磁界を形成するパルス電流は固定子21の電機子巻線23のd軸電流成分とする。
【0057】
(1)8極PMモード:
始動時や急角度の段差部分を乗り越える場合、低速度、大トルクが必要であるので、8極PMモードに切り替え、固定子21の電機子巻線23も8極に切り替える。この場合、電機子巻線23に所定の磁化電流を流し、全可変磁力磁石12を同一方向に磁化させる。これにより、図3(a)に示す8極PMモードなる。
【0058】
(2)4極IPMモード:
回転速度が所定の低速度領域を超えた時に、回転子11の極数を8極PMモードから4極IPMモードに切り替える。この場合、電機子巻線23を4極に切り替え、極短時間だけパルス状のd軸電機子電流を流し、その磁界を用いて回転子11の可変磁力磁石12Aだけを逆方向に磁化させる。これにより、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bが逆極性となり、4極となる。そして、図3(b)に示すように、凸鉄心部130には磁極は現れないので、この部分が凸極となり、4極永久磁石トルクと4極リラクタンストルクが同時に得られる4極IPMモードとなる。
【0059】
このとき、全鎖交磁束数と周波数が下がるので、モータ電圧が下がる。この結果、電源電圧の上限値に対して余裕ができ、回転速度(周波数)を高くすることができる。
【0060】
(3)4極RMモード:
回転速度が所定の中速度領域を超えて高速度領域に入った時には、d軸電機子電流で逆磁界を発生させて全可変磁力磁石12を消磁させ、回転子鉄心13の凸鉄心部130が磁気的な凸極となり、リラクタンストルクだけで回転する4極RMモードに移行する。
【0061】
これにより、モータ電圧が最小となるので回転速度(周波数)を最高値まで上げることができる。
【0062】
このようにして、本実施の形態の3M−PMモータ1では、磁石トルク主体の8極PMモード、磁石トルクとリラクタンストルクの両方で動作する4極IPMモード、リラクタンストルクのみで動作する4極RMモードの3種類の運転モードを速度領域に応じて切り替えることにより、極数変換を可能にして広い可変速運転範囲で高効率の運転ができる。
【0063】
[第2の実施の形態]
3M−PCモータは、基本的には、極性が反転する永久磁石は片方のみでよいので、RMモードを使用しない場合は、図13に示す2M−PCモータ1Aのように、固定磁力磁石14と可変磁力磁石12の組合せも可能である。低保磁力の可変磁力磁石12には、例えば、アルニコ磁石、フェライト磁石、サマリウム・コバルト磁石などを採用する。そして、固定磁力磁石14には、高保磁力磁石としてネオジム磁石を採用する。尚、これらの組み合わせは限定されるものではないが、磁化制御において可変磁力磁石12は極短時間かけられる磁界により増磁あるいは減磁し、固定磁力磁石14はその磁界によっては磁力をほとんど変化させない特性の磁石を選択する。
【0064】
この2M−PCモータ1Aでは、第1の実施の形態における(1)、(2)の切り替え制御により広い速度範囲での可変速運転ができる。ドライブシステムも簡略化できる。
【0065】
尚、上記第1、第2の実施の形態の永久磁石回転電機については、8極−4極の切り替えができる3M−PCモータを例示したが、これに限定されるものではなく、可変磁力磁石12の挿入個数により、4極−2極、6極−3極、12極−6極、16極−8極等の組み合わせも可能である。
【0066】
[第3の実施の形態]
本実施の形態は、回転子磁石の磁化を直接的に変えて極数を変換することで、広い速度範囲で可変速運転できる12極−4極の極数変換モータ1Bである。
【0067】
12極−4極の極数変換永久磁石回転電機(以下、「12/4PCPMモータ」と称す。)は、低保磁力の磁石(以下、「可変磁力磁石」と称す。)の磁化を直接変えることにより回転子の極数を12極と4極に変換し、図14における高トルク、低速度領域Aでは12極、中高速度領域Bでは4極にすることで、広範囲の可変速運転を可能とする。モータは12極にした場合、PMモータとして動作し、4極にした場合はIPMモータとして動作する2種類のトルク発生モードを持つモータでもある。高保磁力の固定磁力磁石と低保磁力の可変磁力磁石の両方を用いることによって、可変磁力磁石のみの場合よりも高トルク化ができる。例えば、低保磁力の可変磁力磁石12には、例えば、アルニコ磁石、フェライト磁石あるいはサマリウム・コバルト磁石などを採用する。そして、高保磁力の固定磁力磁石14としては、ネオジム磁石を採用する。
【0068】
図15に、本実施の形態の12/4PCPMモータ1B(全周の1/4モデル)の構成を示している。12/4PCPMモータ1Bの回転子11Bは、半径方向に長く、回転方向が磁化方向である可変磁力磁石12と、円周方向に長く、半径方向が磁化方向である固定磁力磁石14を回転子鉄心13に等角度ずつ離して埋め込んだ構造である。
【0069】
この12/4PCPMモータ1Bは、固定磁力磁石14と可変磁力磁石12の磁化状態で極数を変換できる磁気構成である。固定子21の構成は、第1の実施の形態と同様であり、電機子巻線23の結線を切り替えることにより極数の切替ができる極数切替回転電機のものを採用する。
【0070】
本実施の形態の12/4PCPMモータ1Bでは、電機子巻線23に極短時間のパルス状のd軸電機子電流を流すことにより生じる磁界を用いて、回転子11Bの可変磁力磁石12を磁化することにより、回転子11Bの極数を変換する。
【0071】
極数変換の動作について、図16の1/2回転子モデルの模式図を用いて説明する。回転子11Bが12極の磁気構成は、図16(a)に示すようになり、可変磁力磁石12と固定磁力磁石14との間の回転子鉄心13の表面に固定磁力磁石14と反対の極が形成される。これより1/2モデルで6極が形成されることになり、全周で12極となる。
【0072】
次に回転子11Bの極数を12極から4極とする場合を述べる。固定子21の電機子巻線23は12極から4極に接続を変え、正のd軸電機子電流による増磁界により可変磁力磁石12の磁化方向を変える。図16(b)に示すように、可変磁力磁石12と固定磁力磁石14との磁化方向は磁気的に同一方向にする。固定磁力磁石14を主とするN極が形成され、1/2モデルで2極となる。全周では4極となる。
【0073】
逆に回転子11Bの極数を4極から12極とする場合、電機子巻線23を4極巻線接続における負のd軸電流で磁界を発生させ、可変磁力磁石12の磁化方向を反転させる。
【0074】
この12/4PCPMモータ1Bに対するドライブシステムは、第1の実施の形態と同様であり、図9〜図12に示すものが採用できる。
【0075】
(1)12極PMモード:
始動時や急角度の段差部分を乗り越える場合、低速度、大トルクが必要であるので、12極PMモードに切り替え、固定子21の電機子巻線23も12極に切り替える。この場合、電機子巻線23に所定の磁化電流を流し、可変磁力磁石12Aと可変磁力磁石12Bを磁化して、固定磁力磁石14の内側面、固定磁力磁石14と隣り合う可変磁力磁石12の向き合う面が共にN極又はS極で同極となる。これにより、図16(a)に示す12極PMモードなる。
【0076】
(2)4極IPMモード:
回転速度が所定の低速度領域を超えた時に、回転子11の極数を12極PMモードから4極IPMモードに切り替える。この場合、電機子巻線23を4極に切り替え、極短時間だけパルス状のd軸電機子電流を流し、その磁界を用いて回転子11の可変磁力磁石12Aと可変磁力磁石12Bも磁化する。磁化は、可変磁力磁石12の磁化方向は隣り合う磁石12A,12Bは同極性、そして固定磁力磁石14とは逆極性となるような方向に作用させる。これにより、可変磁力磁石12Aと12Bと固定磁力磁石14で一つの磁極を形成することになり、全周で4極となる。同時に、固定磁力磁石14に隣接する凸鉄心部130は磁気的に凸極となる。これにより、4極磁石トルクと4極リラクタンストルクとの両方のトルクで回転力を生む4極IPMモードとなる。
【0077】
そして、この4極IPMモードのとき、全鎖交磁束数と周波数が下がるので、モータ電圧が下がる。この結果、電源電圧の上限値に対して余裕ができ、回転速度(周波数)を高くすることができ、高速回転が可能となる。
【実施例2】
【0078】
本発明の回転電機の基本的な変換特性の把握とモータの可能性を検証するために有限要素法磁界解析を行った。解析モデルの諸元表を図17に示す。固定子21の直径は112mm、回転子11Bの直径は55mm、鉄心長は50mm、最大電流は3.6Arms、電機子巻線23の巻数は45、固定磁力磁石14の厚みは2mm、可変磁力磁石12の厚みは3mmである。
【0079】
極数変換におけるモータの永久磁石による磁束密度分布と磁束線を図18、図19に示す。回転子11Bの可変磁力磁石12の極性反転により、図18(a),(b)の1/4コアでは3極が形成されていることから、全周で12極であり、図19(a),(b)では1極なので全周では4極に極数変換できることが確認できた。
【0080】
次に、定格電流3.6[Arms]で電流位相を変化させたときのトルク特性の解析値を図20に示す。尚、トルクは鉄心長が単位長さ(1m)当りの値である。12極の場合の最大トルクは電流位相96degreeで発生し、126(Nm/m)である。4極の最大トルクは電流位相126degreeで発生し、97.8(Nm/m)である。解析モデルでは、12極のトルクが4極より約30%高くなっており、回転電機としていずれも十分なトルクを発生できている。また、図20の最大トルクの電流位相から、12極の場合はほぼ磁石トルクのみで動作し、4極の場合はリラクタンストルクと磁石トルクの両方で動作することが確認された。
【0081】
このように、本実施の形態によれば、可変磁力永久磁石12の磁化を直接変化させて回転子11Bの極数を変換することにより、広い可変速運転を可能とする12極−4極の極数変換の永久磁石回転電機が実現できる。また、可変磁力磁石12のみ磁化を反転させるだけで極数を変換することができ、また十分なトルクも得られる。
【0082】
本実施の形態の永久磁石回転電機にあっても、上記の12極−4極のPCPMモータに限らず、6極−2極のPCPMモータを得ることもできる。
【符号の説明】
【0083】
A 低速度大トルク領域
B 中速度領域
C 高速度領域
1 3M−PCモータ
1A 2M−PCモータ
1B 12/4PCPMモータ
11,11A,11B 回転子
12,12A,12B 可変磁力磁石
13 回転子鉄心
14 固定磁力磁石
21 固定子
22 固定子鉄心
23 電機子巻線
130 凸鉄心部
100 ドライブシステム
100A 主回路
100B 制御回路
104 PWMインバータ
113 可変磁束制御部
129 磁化要求生成部
150 極数切替回路
【特許請求の範囲】
【請求項1】
回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備え、
前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の2n極のPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作するn極IPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態とし、
前記2n極PMモード状態、n極IPMモード状態及びn極RMモード状態の間で相互にモード状態を切り替えて2n極PMモード、n極IPMモード及びn極RMモードのいずれでも運転できる永久磁石回転電機。
【請求項2】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項3】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項4】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記2m極PMモード状態とm極IPMモード状態との間で相互にモード状態を切り替えて2m極PMモードとm極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項5】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項6】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項7】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項8】
回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石をエアギャップ面で交互に異極を形成するように磁化し、磁石トルク主体の2n極のPMモード状態にし、前記電機子巻線が2n極で通常の運転電流を通電することにより2n極PMモードで運転し、
中速から高速度域では、前記電機子巻線をn極に切り替えて所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、半径方向可変磁力磁石1個と円周方向磁化の可変磁力磁石2個で挟まれた磁極部がエアギャップ面で同一極を形成するように前記n個の各可変磁力磁石を磁化し、磁石トルクとリラクタンストルクとの両方で動作するn極IPMモード状態にし、通常の運転電流を通電することによりn極IPMモードで運転し、
また、高速度領域では、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により、前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態にし、通常の運転電流を通電することによりn極RMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項9】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線は4m極で通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極で通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項10】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線を4m極に切り替えて通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極で通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項11】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線を4m極に切り替えて通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極で通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項12】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線を2m極に切り替えて通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項13】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線を6m極に切り替え、通常の運転電流を通電することにより6m極PMモードで運転し、
中高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線を2m極に切り替え、通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項14】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線を6m極に切り替え、通常の運転電流を通電することにより6m極PMモードで運転し、
中高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線を2m極に切り替え、通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項1】
回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備え、
前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の2n極のPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作するn極IPMモード状態とし、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態とし、
前記2n極PMモード状態、n極IPMモード状態及びn極RMモード状態の間で相互にモード状態を切り替えて2n極PMモード、n極IPMモード及びn極RMモードのいずれでも運転できる永久磁石回転電機。
【請求項2】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項3】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項4】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記2m極PMモード状態とm極IPMモード状態との間で相互にモード状態を切り替えて2m極PMモードとm極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項5】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態とし、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記4m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて4m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項6】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項7】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、
極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備え、
前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態とし、前記電機子巻線を2m極にして所定の短時間だけ前記第1の磁化電流とは逆向きの第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態とし、
前記6m極PMモード状態と2m極IPMモード状態との間で相互にモード状態を切り替えて6m極PMモードと2m極IPMモードとのいずれでも運転できる永久磁石回転電機。
【請求項8】
回転子鉄心内に半径方向を磁化方向とする複数n個の可変磁力磁石を円周方向に所定の間隔で埋め込んだ回転子と、極数切替回路にて電機子巻線の結線をn極と2n極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線の結線を2n極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により前記n個の可変磁力磁石をエアギャップ面で交互に異極を形成するように磁化し、磁石トルク主体の2n極のPMモード状態にし、前記電機子巻線が2n極で通常の運転電流を通電することにより2n極PMモードで運転し、
中速から高速度域では、前記電機子巻線をn極に切り替えて所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、半径方向可変磁力磁石1個と円周方向磁化の可変磁力磁石2個で挟まれた磁極部がエアギャップ面で同一極を形成するように前記n個の各可変磁力磁石を磁化し、磁石トルクとリラクタンストルクとの両方で動作するn極IPMモード状態にし、通常の運転電流を通電することによりn極IPMモードで運転し、
また、高速度領域では、前記電機子巻線をn極にして所定の短時間だけ第3の磁化電流を流すことによって発生する磁界により、前記n個の可変磁力磁石を消磁してリラクタンストルクのみで動作するn極RMモード状態にし、通常の運転電流を通電することによりn極RMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項9】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線は4m極で通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極で通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項10】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線を4m極に切り替えて通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極で通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項11】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、前記電機子巻線を4m極に切り替えて通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線は2m極で通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項12】
回転子鉄心内に半径方向を磁化方向とするm個の可変磁力磁石とm個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と4m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を4m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が同一になるように磁化して磁石トルク主体の4m極PMモード状態にし、通常の運転電流を通電することにより4m極PMモードで運転し、
中速から高速度領域では、前記電機子巻線を4m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記m個の可変磁力磁石を前記固定磁力磁石と磁化方向が逆向きになるように磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線を2m極に切り替えて通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項13】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を6m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線を6m極に切り替え、通常の運転電流を通電することにより6m極PMモードで運転し、
中高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線を2m極に切り替え、通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【請求項14】
回転子鉄心内に回転方向を磁化方向とする偶数2m個の可変磁力磁石と、半径方向を磁化方向とする偶数2m個の固定磁力磁石とを円周方向に所定の間隔で交互に埋め込んだ回転子と、極数切替回路にて電機子巻線の結線を2m極と6m極との間で極数切替ができる固定子とを備えた永久磁石回転電機の運転方法であって、
大トルク、低速度領域では、前記電機子巻線を2m極にして所定の短時間だけ通常の運転時の電流よりも大きい第1の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS同極となるように前記可変磁力磁石それぞれを磁化して磁石トルク主体の6m極PMモード状態にし、前記電機子巻線の結線を6m極に切り替え、通常の運転電流を通電することにより6m極PMモードで運転し、
中高速度領域では、前記電機子巻線を2m極にして所定の短時間だけ第2の磁化電流を流すことによって発生する磁界により、前記可変磁力磁石とその両隣の可変磁力磁石とが取り囲む回転鉄心部分で磁極がN若しくはS逆極となるように前記可変磁力磁石それぞれを磁化して磁石トルクとリラクタンストルクの両方で動作する2m極IPMモード状態にし、前記電機子巻線の結線を2m極に切り替え、通常の運転電流を通電することにより2m極IPMモードで運転することを特徴とする永久磁石回転電機の運転方法。
【図1】


【図2】
【図3】
【図4】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図20】
【図5】
【図6】
【図7】
【図18】
【図19】
【図2】
【図3】
【図4】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図20】
【図5】
【図6】
【図7】
【図18】
【図19】
【公開番号】特開2013−34317(P2013−34317A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−169338(P2011−169338)
【出願日】平成23年8月2日(2011.8.2)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2011年3月5日、社団法人電気学会発行の「平成23年 電気学会全国大会講演論文集」(CD−ROM)の、「12極−4極の極数変換永久磁石モータ」(5−015)、「3種トルク発生と極数変換を可能とする新規永久磁石モータ」(5−016)に発表
【出願人】(501061319)学校法人 東洋大学 (68)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年8月2日(2011.8.2)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2011年3月5日、社団法人電気学会発行の「平成23年 電気学会全国大会講演論文集」(CD−ROM)の、「12極−4極の極数変換永久磁石モータ」(5−015)、「3種トルク発生と極数変換を可能とする新規永久磁石モータ」(5−016)に発表
【出願人】(501061319)学校法人 東洋大学 (68)
【Fターム(参考)】
[ Back to top ]