
油圧装置
【課題】油圧アクチュエータが異常であるか否かを判断する手段を有する油圧装置のコストダウンを図る。
【解決手段】各油圧アクチュエータ17〜19のいずれか1つだけが操作されている場合、CPUが、流量センサ28で検出されるドレンの流量が、あらかじめ定められたしきい値を超えたか否かを判断する。そして、検出されるドレンの流量がしきい値を超えていると判断すると、CPUが、当該操作されている油圧アクチュエータに異常があるものと判断するように構成した。これにより、1つの流量センサ28でドレンの流量を検出することによって複数の油圧アクチュエータ17〜19の異常の有無を判断できるので、流量センサ28の設置数を減らしてコストダウンできる。
【解決手段】各油圧アクチュエータ17〜19のいずれか1つだけが操作されている場合、CPUが、流量センサ28で検出されるドレンの流量が、あらかじめ定められたしきい値を超えたか否かを判断する。そして、検出されるドレンの流量がしきい値を超えていると判断すると、CPUが、当該操作されている油圧アクチュエータに異常があるものと判断するように構成した。これにより、1つの流量センサ28でドレンの流量を検出することによって複数の油圧アクチュエータ17〜19の異常の有無を判断できるので、流量センサ28の設置数を減らしてコストダウンできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、油圧アクチュエータが異常であるか否かを判断する手段を有する油圧装置に関する。
【背景技術】
【0002】
油圧ポンプや油圧アクチュエータから排出されるドレンの流量に基づいて、油圧ポンプや油圧アクチュエータの異常の有無を検出することが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭59−83811号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上述した特許文献に記載の油圧機器の診断装置では、診断対象となる油圧機器毎に流量検出器が必要となるため、診断対象となる油圧機器が増えるにつれて流量検出器が増えるので、コストが上昇する。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明による油圧装置は、油圧ポンプと、油圧ポンプからの圧油により駆動する少なくとも第1および第2の油圧アクチュエータと、第1の油圧アクチュエータを駆動させるために操作される第1の操作手段と、第2の油圧アクチュエータを駆動させるために操作される第2の操作手段と、第1の油圧アクチュエータから排出されるドレン、および、第2の油圧アクチュエータから排出されるドレンの双方が流通するドレン流路と、ドレン流路の流量を検出する流量検出手段と、第1の操作手段が操作されているか否かを判断する第1の操作判断手段と、第2の操作手段が操作されているか否かを判断する第2の操作判断手段と、第1の操作判断手段で第1の操作手段が操作されていると判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていないと判断され、かつ、流量検出手段の検出流量が第1の所定流量を超えていると判断されると、第1の油圧アクチュエータが異常であると判断し、第1の操作判断手段で第1の操作手段が操作されていないと判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていると判断され、かつ、流量検出手段の検出流量が第2の所定流量を超えていると判断されると、第2の油圧アクチュエータが異常であると判断する異常判断手段とを備えることを特徴とする。
(2) 請求項2の発明は、請求項1に記載の油圧装置において、ドレン流路は、油圧ポンプから排出されるドレンがさらに流通し、異常判断手段は、第1の操作判断手段で第1の操作手段が操作されていないと判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていないと判断され、かつ、流量検出手段の検出流量が第3の所定流量を超えていると判断されると、油圧ポンプが異常であると判断することを特徴とする。
(3) 請求項3の発明は、請求項1または請求項2に記載の油圧装置において、第1の所定流量と、第2の所定流量とは異なる流量であることを特徴とする。
【発明の効果】
【0006】
本発明によれば、複数の油圧アクチュエータから排出されるドレンが流通するドレン流路と、ドレン流路の流量を検出する流量検出手段とを設け、いずれか一つの油圧アクチュエータの操作手段だけが操作されていると判断され、かつ、流量検出手段の検出流量が所定流量を超えていると判断されると、当該操作に係る油圧アクチュエータが異常であると判断するように構成した。これにより、複数の油圧アクチュエータの異常の有無を判断するのに必要な流量検出手段が1つで済むので、流量検出手段の設置数を減らしてコストダウンできる。
【図面の簡単な説明】
【0007】
【図1】本実施の形態の作業機械の一例である移動式クレーン(クローラクレーン)の外観側面図である。
【図2】クレーンの油圧回路の概略を示す図である。
【図3】各油圧機器の異常有無検出機能に関する構成を示す図である。
【図4】各油圧機器から発生するドレン量に影響を及ぼす要因について説明する図である。
【図5】報知信号の出力処理の動作について説明するフローチャートである。
【発明を実施するための形態】
【0008】
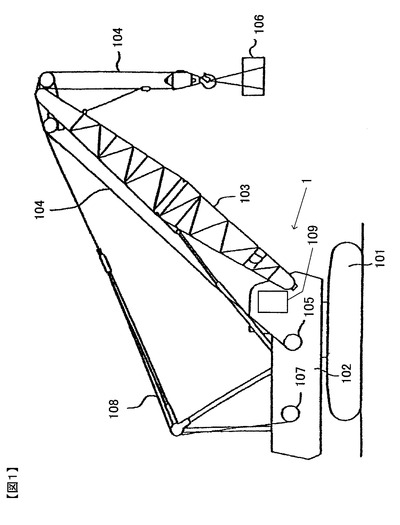
図1〜5を参照して、本発明による油圧装置および作業機械の一実施の形態を説明する。図1は、本実施の形態の作業機械の一例である移動式クレーン(クローラクレーン)の外観側面図である。図1に示すように、移動式クレーン(以下、単にクレーンと呼ぶ)1は、履帯式の走行体101と、走行体101上に搭載された旋回可能な旋回体102と、旋回体102に起伏可能に支持されたブーム103とを有する。旋回体102にはウインチドラム(巻き取りドラム)105が搭載され、巻き取りドラム105の駆動によりワイヤロープ104が巻き上げまたは巻き下げられ、吊り荷(掘削用バケット等)106が昇降する。また、旋回体102には起伏ドラム107が搭載され、起伏ドラム107の駆動により起伏ロープ108が巻き上げまたは巻き下げられ、ブーム103が起伏される。109は、旋回体102に設けられたクレーン1の運転室である。
【0009】
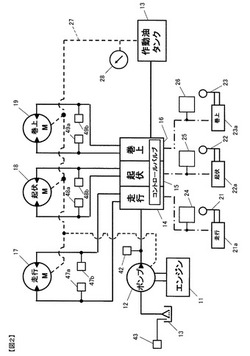
図2は、本実施の形態のクレーン1の油圧回路の概略を示す図である。クレーン1には、エンジン11と、エンジン11で駆動される油圧ポンプ12と、作動油タンク13と、油圧ポンプ12からの圧油で駆動される各油圧アクチュエータ(走行モータ17,起伏モータ18、巻き上げモータ19)とが設けられている。油圧ポンプ12は可変容量型の油圧ポンプであり、不図示の傾転角度制御装置によって傾転角度が制御されることでポンプ容量が制御される。走行モータ17は、クレーン1を走行させるための油圧モータであり、走行モータ用コントロールバルブ14で流れが制御された油圧ポンプ12からの圧油によって駆動される。
【0010】
起伏モータ18は、起伏ドラム107を駆動させるための油圧モータであり、起伏モータ用コントロールバルブ15で流れが制御された油圧ポンプ12からの圧油によって駆動される。巻き上げモータ19は、巻き取りドラム105を駆動させるための油圧モータであり、巻き上げモータ用コントロールバルブ16で流れが制御された油圧ポンプ12からの圧油によって駆動される。
【0011】
走行モータ用コントロールバルブ14は、運転室109内に設けられた走行モータ用操作レバー21の操作方向および操作量に応じて制御される。起伏モータ用コントロールバルブ15は、運転室109内に設けられた起伏モータ用操作レバー22の操作方向および操作量に応じて制御される。巻き上げモータ用コントロールバルブ16は、運転室109内に設けられた巻き上げモータ用操作レバー23の操作方向および操作量に応じて制御される。
【0012】
すなわち、走行モータ用コントロールバルブ14は、走行モータ用操作レバー21の操作方向および操作量に応じて操作されるパイロット弁21aを介して供給される不図示のパイロットポンプからのパイロット圧油により制御される。起伏モータ用コントロールバルブ15は、起伏モータ用操作レバー22の操作方向および操作量に応じて操作されるパイロット弁22aを介して供給される不図示のパイロットポンプからのパイロット圧油により制御される。巻き上げモータ用コントロールバルブ16は、巻き上げモータ用操作レバー23の操作方向および操作量に応じて操作されるパイロット弁23aを介して供給される不図示のパイロットポンプからのパイロット圧油により制御される。
【0013】
各操作レバー21〜23の各パイロット弁21a〜23aと、各コントロールバルブ14〜16とを結ぶパイロット油圧配管には、それぞれ圧力センサ24〜26が設けられている。圧力センサ24は、走行モータ用操作レバー21の操作量に応じて制御される走行モータ用コントロールバルブ14に供給されるパイロット圧油の圧力を検出する。圧力センサ25は、起伏モータ用操作レバー22の操作量に応じて制御される起伏モータ用コントロールバルブ15に供給されるパイロット圧油の圧力を検出する。圧力センサ26は、巻き上げモータ用操作レバー23の操作量に応じて制御される巻き上げモータ用コントロールバルブ16に供給されるパイロット圧油の圧力を検出する。
【0014】
油圧ポンプ12、走行モータ17、起伏モータ18、および巻き上げモータ19から排出されるドレンは、全て1本のドレン配管27を経由して作動油タンク13に戻る。ドレン配管27には、ドレン配管27内を流れるドレン(作動油)の流量を検出する流量計(流量センサ)28が取り付けられている。
【0015】
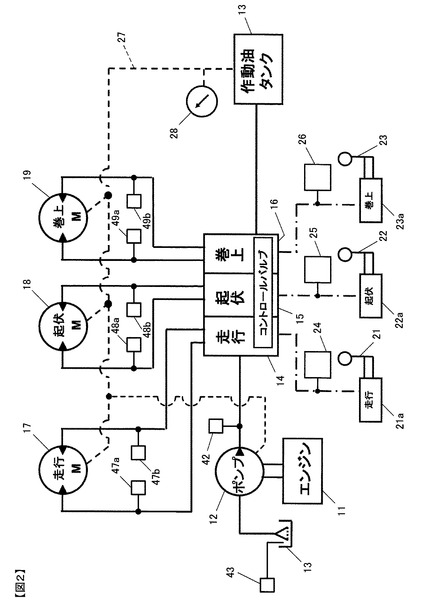
図3は、油圧ポンプ12および各油圧アクチュエータ17〜19についての後述する異常有無検出機能に関する構成を示す図である。図3に示すように、クレーン1には、コントローラ31が設けられている。コントローラ31は、クレーン1の各部を制御するための制御装置であり、各種の演算を行うCPU31aや記憶装置であるメモリ31b、その他周辺機器等を有する。なお、本実施の形態の説明では、コントローラ31の機能に関し、油圧ポンプ12および各油圧アクチュエータ17〜19についての後述する異常有無検出機能について主に説明し、他の機能についての説明を省略する。
【0016】
コントローラ31には、上述した圧力センサ24〜26と、流量センサ28とが接続されている。また、コントローラ31には、圧力センサ42と、油温センサ43と、走行モータ圧力センサ47a,47bと、起伏モータ圧力センサ48a,48bと、巻き上げモータ圧力センサ49a,49bと、エンジン回転数センサ51と、傾転角センサ52とが接続されている。さらにコントローラ31には、報知装置32が接続されている。圧力センサ42は、油圧ポンプ12の圧油の吐出圧力を検出するセンサである。油温センサ43は、作動油の温度を検出するセンサである。
【0017】
走行モータ圧力センサ47a,47bは、走行モータ17に供給される圧油の圧力を検出するセンサであり、起伏モータ圧力センサ48a,48bは、起伏モータ18に供給される圧油の圧力を検出するセンサであり、巻き上げモータ圧力センサ49a,49bは、巻き上げモータ19に供給される圧油の圧力を検出するセンサである。なお、走行モータ17の回転方向に関わらず供給される圧油の圧力を検出するために、圧油が入出する2つのポートにそれぞれ接続される2本の配管のうち、一方の配管にセンサ47aが設けられ、他方の配管にセンサ47bが設けられている。起伏モータ圧力センサ48a,48bおよび巻き上げモータ圧力センサ49a,49bについても同様である。
【0018】
エンジン回転数センサ51は、エンジン11の回転速度を検出するセンサであるが、本実施の形態では、エンジン11の回転速度から油圧ポンプ12の回転速度を演算するためにも用いられる。傾転角センサ52は、油圧ポンプ12の傾転角度を検出するためのセンサである。報知装置32は、後述するように、各油圧機器12,17〜19に異常が有る旨をオペレータに報知するための装置である。報知装置32は、たとえば、クレーン1の各部の状態や作業状況等を表示する、運転室109内に設けられた表示モニタや、音声出力を行うスピーカなどである。
【0019】
本実施の形態では、コントローラ31は、次のようにして各油圧機器12,17〜19の異常の有無を検出する。そして、各油圧機器12,17〜19のいずれかの異常が検出されると、コントローラ31は、油圧機器の異常が検出された旨、および、どの油圧機器に異常が検出されたのかを示す情報を報知装置32に表示させる。なお、油圧機器の異常が検出された旨、および、どの油圧機器に異常が検出されたのかをスピーカを介して音声で出力するように構成してもよい。
【0020】
各油圧機器12,17〜19の積算稼働時間が長くなるほど、各油圧機器12,17〜19から発生するドレンの量は増加する。したがって、各油圧機器12,17〜19から発生するドレン量に基づいて、各油圧機器12,17〜19のメンテナンス時期や異常の有無が推定可能である。しかし、本実施の形態では、上述したように各油圧機器12,17〜19から発生するドレンは、全て1本のドレン配管27を経由して作動油タンク13に戻るように構成され、ドレン配管27に設けられた流量センサ28は、1つだけである。
【0021】
そこで、本実施の形態では、各油圧アクチュエータ17〜19のうち、いずれか1つだけが操作されている場合に、コントローラ31のCPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断する。そして、CPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、各油圧アクチュエータ17〜19のうち当該操作されている油圧アクチュエータに異常があるものと判断する。また、本実施の形態では、いずれの油圧アクチュエータ17〜19も操作されていない場合にも、コントローラ31のCPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断する。この場合、CPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、油圧ポンプ12に異常があるものと判断する。ここで、各油圧機器12,17〜19に異常があるか否かの判断を行うための、上述した所定の流量の値(しきい値)は、各油圧機器12,17〜19毎に定められており、メモリ31bに記憶されている。
【0022】
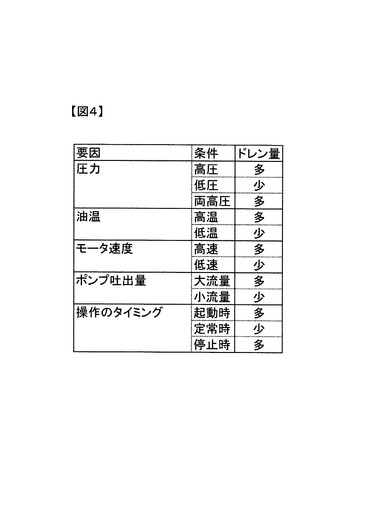
なお、各油圧機器12,17〜19から発生するドレン量は、図4に示すように、複数の要因の影響を受ける。たとえば、各油圧アクチュエータ17〜19に供給される圧油の圧力が高ければ発生するドレン量は増える。なお、図4で圧力要因の条件として示した両高圧とは、油圧アクチュエータの圧油の入口ポートおよび出口ポートの双方の圧力が高くなる状態を指す。たとえば、2つの油圧アクチュエータが油圧回路上で直列に配設されているときに、当該2つの油圧アクチュエータが同時に操作(複合操作)されると、上流側の油圧アクチュエータの出口側ポートの圧力も高くなり、両高圧の状態となる。
【0023】
作動油温が高ければ、各油圧機器12,17〜19から発生するドレン量は多くなる。各油圧アクチュエータ(油圧モータ)17〜19の回転速度が高ければ、各油圧アクチュエータ17〜19から発生するドレン量は多くなる。油圧ポンプ12からの圧油の吐出量が多ければ、油圧ポンプ12から発生するドレン量は多くなる。各油圧アクチュエータ17〜19の操作のタイミングに関し、各油圧アクチュエータ17〜19が停止中である、または駆動速度が一定である場合(定常時)には、各油圧アクチュエータ17〜19から発生するドレン量は少なくなる。逆に、各油圧アクチュエータ17〜19を起動させるとき(起動時)および停止させるとき(停止時)には、各油圧アクチュエータ17〜19から発生するドレン量は多くなる。
【0024】
そこで、本実施の形態では、図4に例示したドレンの流量に影響を与える各要因(圧力、油温、モータ速度、ポンプ吐出量、操作のタイミング等)をパラメータとして、各油圧機器12,17〜19に異常があるか否かの判断を行うための各しきい値の値があらかじめ定められている。そして、各要因をパラメータとしたしきい値についてのテーブルが、各油圧機器12,17〜19毎にメモリ31bに記憶されている。以下の説明では、走行モータ17の異常有無の判断のためのしきい値を走行モータ用しきい値と呼び、起伏モータ18の異常有無の判断のためのしきい値を起伏モータ用しきい値と呼ぶ。また、巻き上げモータ19の異常有無の判断のためのしきい値を巻き上げモータ用しきい値と呼び、油圧ポンプ12の異常有無の判断のためのしきい値を油圧ポンプ用しきい値と呼ぶ。
【0025】
CPU31aは、各センサ24〜26,42,43,47a〜49b,51,52での検出値に基づいて、パラメータとなる各要因の値を演算し、対応するしきい値を読み込む。そして、CPU31aは、読み込んだしきい値と、流量センサ28で検出されるドレンの流量とを比較することで各油圧機器12,17〜19の異常の有無を判断する。
【0026】
すなわち、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、走行モータ17のみが操作(駆動)されていると判断すると、圧力センサ24の検出圧力から操作レバー21の操作量、すなわち走行モータ17の回転速度を推定(演算)する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ47a,47bで検出した走行モータ17へ供給される圧油の圧力を読み込む。また、CPU31aは、圧力センサ24の検出圧力の推移に基づいて、走行モータ17の操作のタイミングとして、上述した定常時であるのか、起動時であるのか、停止時であるのかを判断する。そして、CPU31aは、演算した走行モータ17の回転速度、各センサから読み込んだ油温や油圧、判断した走行モータ17の操作のタイミング等に基づいて、メモリ31bに記憶されている上述したテーブルから走行モータ用しきい値を読み込む。
【0027】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ走行モータ用しきい値を超えていると判断すると、走行モータ17に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、走行モータ17に異常がある旨が表示され、走行モータ17に異常がある旨の音声がスピーカから出力される。
【0028】
また、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、起伏モータ18のみが操作(駆動)されていると判断すると、圧力センサ25の検出圧力から操作レバー22の操作量、すなわち起伏モータ18の回転速度を推定(演算)する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ48a,48bで検出した起伏モータ18へ供給される圧油の圧力を読み込む。また、CPU31aは、圧力センサ25の検出圧力の推移に基づいて、起伏モータ18の操作のタイミングとして、上述した定常時であるのか、起動時であるのか、停止時であるのかを判断する。そして、CPU31aは、演算した起伏モータ18の回転速度、各センサから読み込んだ油温や油圧、判断した起伏モータ18の操作のタイミング等に基づいて、メモリ31bに記憶されている上述したテーブルから起伏モータ用しきい値を読み込む。
【0029】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ起伏モータ用しきい値を超えていると判断すると、起伏モータ18に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、起伏モータ18に異常がある旨が表示され、起伏モータ18に異常がある旨の音声がスピーカから出力される。
【0030】
また、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、巻き上げモータ19のみが操作(駆動)されていると判断すると、圧力センサ26の検出圧力から操作レバー23の操作量、すなわち巻き上げモータ19の回転速度を推定(演算)する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ49a,49bで検出した巻き上げモータ19へ供給される圧油の圧力を読み込む。また、CPU31aは、圧力センサ26の検出圧力の推移に基づいて、巻き上げモータ19の操作のタイミングとして、上述した定常時であるのか、起動時であるのか、停止時であるのかを判断する。そして、CPU31aは、演算した巻き上げモータ19の回転速度、各センサから読み込んだ油温や油圧、判断した巻き上げモータ19の操作のタイミング等に基づいて、メモリ31bに記憶されている上述したテーブルから巻き上げモータ用しきい値を読み込む。
【0031】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ巻き上げモータ用しきい値を超えていると判断すると、巻き上げモータ19に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、巻き上げモータ19に異常がある旨が表示され、巻き上げモータ19に異常がある旨の音声がスピーカから出力される。
【0032】
なお、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、いずれの操作レバー21〜23も操作されていないと判断すると、エンジン回転数センサ51で検出したエンジン11の回転速度から油圧ポンプ12の回転速度を演算する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ42で検出した油圧ポンプ12の吐出の圧力、傾転角センサ52で検出した油圧ポンプ12の傾転角度を読み込む。そして、CPU31aは、演算した油圧ポンプ12の回転速度、各センサから読み込んだ油温や油圧、傾転角度等に基づいて、メモリ31bに記憶されている上述したテーブルから油圧ポンプ用しきい値を読み込む。
【0033】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ油圧ポンプ用しきい値を超えていると判断すると、油圧ポンプ12に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、油圧ポンプ12に異常がある旨が表示され、油圧ポンプ12に異常がある旨の音声がスピーカから出力される。
【0034】
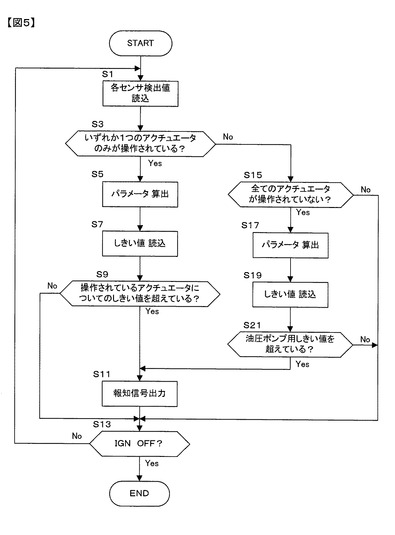
図5は、上述した報知信号の出力処理の動作について説明するフローチャートである。クレーン1の不図示のイグニッションスイッチがオンされると、図5に示す処理を行うプログラムが起動されてCPU31aで実行される。ステップS1において、各センサ24〜26,42,43,47a〜49b,51,52での検出値を読み込んでステップS3へ進む。ステップS3において、各圧力センサ24〜26の検出値に基づいて、各油圧アクチュエータ17〜19のうち、いずれか1つだけが操作されているか否かを判断する。
【0035】
ステップS3が肯定判断されるとステップS5へ進み、ステップS1で読み込んだ検出値に基づいて、しきい値を読み込むために必要なパラメータである油圧アクチュエータの回転速度や操作のタイミングなどを算出してステップS7へ進む。ステップS7において、ステップS3の肯定判断に係る油圧アクチュエータについてのメモリ31bに記憶されているしきい値のテーブルから、ステップS1で読み込んだ検出値やステップS5で算出したパラメータに基づいて該当するしきい値を読み込んでステップS9へ進む。
【0036】
ステップS9において、流量センサ28で検出されるドレンの流量が、ステップS7で読み込んだしきい値を超えているか否かを判断する。ステップS9が肯定判断されるとステップS11へ進み、各油圧機器12,17〜19のうち、ステップS9または後述するステップS21の判断に係る油圧機器に異常がある旨を報知するための報知信号を報知装置32に出力してステップS13へ進む。
【0037】
ステップS13において、クレーン1の不図示のイグニッションスイッチがオフされたか否かを判断する。ステップS13が肯定判断されると本プログラムを終了する。ステップS13が否定判断されるとステップS1へ戻る。
【0038】
ステップS9が否定判断されるとステップS13へ進む。
【0039】
ステップS3が否定判断されるとステップS15へ進み、各圧力センサ24〜26の検出値に基づいて、全ての油圧アクチュエータ17〜19が操作されていないか否かを判断する。ステップS15が肯定判断されると(すなわち、全ての油圧アクチュエータ17〜19が操作されていない場合)ステップS17へ進み、ステップS1で読み込んだ検出値に基づいて、油圧ポンプ用しきい値を読み込むために必要なパラメータである油圧ポンプ12の回転速度などを算出してステップS19へ進む。ステップS19において、メモリ31bに記憶されている油圧ポンプ用しきい値のテーブルから、ステップS1で読み込んだ検出値やステップS17で算出したパラメータに基づいて該当する油圧ポンプ用しきい値を読み込んでステップS21へ進む。
【0040】
ステップS21において、流量センサ28で検出されるドレンの流量が、ステップS19で読み込んだ油圧ポンプ用しきい値を超えているか否かを判断する。ステップS21が肯定判断されるとステップS11へ進む。
【0041】
ステップS21が否定判断されるとステップS13へ進む。ステップS15が否定判断されるとステップS13へ進む。
【0042】
本実施の形態のクレーン1によれば、次の作用効果を奏する。
(1) 各油圧アクチュエータ17〜19のうち、いずれか1つだけが操作されている場合に、コントローラ31のCPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断するように構成した。そして、CPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、各油圧アクチュエータ17〜19のうち当該操作されている油圧アクチュエータに異常があるものと判断するように構成した。これにより、1つの流量センサ28でドレンの流量を検出することによって複数の油圧アクチュエータ17〜19の異常の有無を判断できるので、流量センサ28の設置数を減らしてコストダウンできる。
【0043】
(2) いずれの油圧アクチュエータ17〜19も操作されていない場合に、コントローラ31のCPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断するように構成した。そして、CPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、油圧ポンプ12に異常があるものと判断するように構成した。これにより、油圧アクチュエータ17〜19の異常の有無の判断に加えて、油圧ポンプ12の異常の有無を判断できるようになるので、油圧装置の異常検出装置としての機能が向上し、各油圧機器12,17〜19のメンテナンスがしやすくなる。
【0044】
(3) 各油圧機器12,17〜19に異常があるか否かの判断を行うためのしきい値を、各油圧機器12,17〜19毎に定めてメモリ31bに記憶させるように構成した。これにより、異常の有無を各油圧機器12,17〜19に応じて適切に判断できるので、油圧装置の異常検出装置としての信頼性を向上できる。
【0045】
−−−変形例−−−
(1) 上述の説明では、各油圧機器12,17〜19の異常有無の判断のためのしきい値のパラメータとして上述した各要因を挙げているが、本発明はこれに限定されない。上述した各要因は一例であって、各油圧機器12,17〜19の異常有無の判断のためのしきい値のパラメータとして上述した要因以外の他の要因を考慮してもよい。また、上述の説明で例示した各要因のいずれかを判断しないようにしてもよい。たとえば、上述の説明では、作動油の温度を検出し、検出した作動油の温度を各油圧機器12,17〜19の異常有無の判断のためのしきい値のパラメータとしているが、本発明はこれに限定されない。すなわち、作動油の温度を検出せず、作動油の温度がある程度温まったと推定される、クレーン1の運転開始から所定時間T1が経過した後から、各油圧機器12,17〜19の異常有無の判断を行うように構成してもよい。また、上述の説明では、各操作レバー21〜23の操作量について考慮しているが、本発明はこれに限定されない。すなわち、圧力センサ24〜26に代えて、所定の圧力でオンオフの出力が変化する圧力スイッチを設け、各操作レバー21〜23の操作量について考慮せず、操作の有無のみを考慮するように構成してもよい。
【0046】
このように構成した場合、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、各圧力スイッチのうち、パイロット弁21aと走行モータ用コントロールバルブ14とを結ぶパイロット油圧配管に設けられた圧力スイッチのみがオンされているときに、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ走行モータ17の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、走行モータ17に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、走行モータ17に異常がある旨が表示され、走行モータ17に異常がある旨の音声がスピーカから出力される。
【0047】
また、このように構成した場合、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、各圧力スイッチのうち、パイロット弁22aと起伏モータ用コントロールバルブ15とを結ぶパイロット油圧配管に設けられた圧力スイッチのみがオンされているときに、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ起伏モータ18の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、起伏モータ18に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、起伏モータ18に異常がある旨が表示され、起伏モータ18に異常がある旨の音声がスピーカから出力される。
【0048】
また、このように構成した場合、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、各圧力スイッチのうち、パイロット弁23aと巻き上げモータ用コントロールバルブ16とを結ぶパイロット油圧配管に設けられた圧力スイッチのみがオンされているときに、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ巻き上げモータ19の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、巻き上げモータ19に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、巻き上げモータ19に異常がある旨が表示され、巻き上げモータ19に異常がある旨の音声がスピーカから出力される。
【0049】
なお、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、圧力センサ24〜26に代えて設けられた各圧力スイッチの全てがオフされているときに(すなわち、いずれの操作レバー21〜23も操作されていないときに)、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ油圧ポンプ12の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、油圧ポンプ12に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、油圧ポンプ12に異常がある旨が表示され、油圧ポンプ12に異常がある旨の音声がスピーカから出力される。
【0050】
(2) 上述の説明では、上述した各要因をパラメータとした各しきい値についてのテーブルをメモリ31bに記憶させているが、上述した各要因をパラメータとした各しきい値の算出式をメモリ31bに記憶させ、適宜しきい値を算出するように構成してもよい。
【0051】
(3) 上述の説明では、各油圧機器12,17〜19から発生するドレン量に基づいて各油圧機器12,17〜19の異常の有無を判断するように構成しているが、本発明はこれに限定されない。たとえば、各油圧機器12,17〜19から発生するドレン量に基づいて、各油圧機器12,17〜19のメンテナンスの要否を判断するように構成してもよく、各油圧機器12,17〜19のメンテナンス時期が近づいたか否かを判断するように構成してもよい。
【0052】
(4) 上述の説明では、ドレン配管27に流量計としての流量センサ28を設けてドレンの流量を検出するように構成しているが、本発明はこれに限定されない。たとえば、流量計に代えて流量スイッチをドレン配管27に設けるように構成してもよい。この場合、上述したしきい値が、油圧機器の相違にかかわらず1つの値となるため、図4に例示したドレンの流量に影響を与える上述した各要因(圧力、油温、モータ速度、ポンプ吐出量、操作のタイミング等)を加味した上で、各油圧機器12,17〜19の異常の有無を判断するように構成すればよい。たとえば、走行モータ17と起伏モータ18とでは、異常の有無を判断する際に当該モータの回転速度を考慮してもよい。
【0053】
具体的には、走行モータ17のみが操作されていると判断し、かつ、流量スイッチの出力からドレン量が所定の流量以上であると判断し、かつ、走行モータ17の回転速度があるしきい値A1未満である場合に走行モータ17に異常があると判断するように構成してもよい。そして、起伏モータ18のみが操作されていると判断し、かつ、流量スイッチの出力からドレン量が所定の流量以上であると判断し、かつ、起伏モータ18の回転速度があるしきい値A2未満である場合に起伏モータ18に異常があると判断するように構成してもよい。この場合、回転速度のしきい値A1と、回転速度のしきい値A2とが同じ値であってもよく、異なる値であっても良い。
【0054】
(5) 上述の説明では、油圧ポンプ12の異常の有無を判断するように構成しているが、油圧ポンプ12の異常の有無を判断することは必須ではない。また、異常の有無の判断に係る油圧アクチュエータの数は、2以上であればよい。
(6) 上述の説明では、油圧アクチュエータの例として、走行モータ17、起伏モータ18、および巻き上げモータ19を挙げているが、本発明はこれに限定されず、他の油圧モータ(たとえば旋回モータ)や、他の油圧アクチュエータ(たとえば油圧シリンダ)等に本発明を適用しても良い。
【0055】
(7) 上述の説明では、作業機械の一例である移動式クレーンを挙げているが、本発明はこれに限定されず、たとえば、油圧ショベルやホイールローダなど、他の作業機械に本発明を適用してもよい。
(8) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0056】
なお、本発明は、上述した実施の形態のものに何ら限定されず、油圧ポンプと、油圧ポンプからの圧油により駆動する少なくとも第1および第2の油圧アクチュエータと、第1の油圧アクチュエータを駆動させるために操作される第1の操作手段と、第2の油圧アクチュエータを駆動させるために操作される第2の操作手段と、第1の油圧アクチュエータから排出されるドレン、および、第2の油圧アクチュエータから排出されるドレンの双方が流通するドレン流路と、ドレン流路の流量を検出する流量検出手段と、第1の操作手段が操作されているか否かを判断する第1の操作判断手段と、第2の操作手段が操作されているか否かを判断する第2の操作判断手段と、第1の操作判断手段で第1の操作手段が操作されていると判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていないと判断され、かつ、流量検出手段の検出流量が第1の所定流量を超えていると判断されると、第1の油圧アクチュエータが異常であると判断し、第1の操作判断手段で第1の操作手段が操作されていないと判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていると判断され、かつ、流量検出手段の検出流量が第2の所定流量を超えていると判断されると、第2の油圧アクチュエータが異常であると判断する異常判断手段とを備えることを特徴とする各種構造の油圧装置を含むものである。
【符号の説明】
【0057】
1 移動式クレーン(クローラクレーン、クレーン)、12 油圧ポンプ、14 走行モータ用コントロールバルブ、15 起伏モータ用コントロールバルブ、16 巻き上げモータ用コントロールバルブ、17 走行モータ、18 起伏モータ、19 巻き上げモータ、21 走行モータ用操作レバー、22 起伏モータ用操作レバー、23 巻き上げモータ用操作レバー、24〜26 圧力スイッチ、27 ドレン配管、28 流量計(流量センサ)、31 コントローラ、31a CPU、31b メモリ、32 報知装置
【技術分野】
【0001】
本発明は、油圧アクチュエータが異常であるか否かを判断する手段を有する油圧装置に関する。
【背景技術】
【0002】
油圧ポンプや油圧アクチュエータから排出されるドレンの流量に基づいて、油圧ポンプや油圧アクチュエータの異常の有無を検出することが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭59−83811号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上述した特許文献に記載の油圧機器の診断装置では、診断対象となる油圧機器毎に流量検出器が必要となるため、診断対象となる油圧機器が増えるにつれて流量検出器が増えるので、コストが上昇する。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明による油圧装置は、油圧ポンプと、油圧ポンプからの圧油により駆動する少なくとも第1および第2の油圧アクチュエータと、第1の油圧アクチュエータを駆動させるために操作される第1の操作手段と、第2の油圧アクチュエータを駆動させるために操作される第2の操作手段と、第1の油圧アクチュエータから排出されるドレン、および、第2の油圧アクチュエータから排出されるドレンの双方が流通するドレン流路と、ドレン流路の流量を検出する流量検出手段と、第1の操作手段が操作されているか否かを判断する第1の操作判断手段と、第2の操作手段が操作されているか否かを判断する第2の操作判断手段と、第1の操作判断手段で第1の操作手段が操作されていると判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていないと判断され、かつ、流量検出手段の検出流量が第1の所定流量を超えていると判断されると、第1の油圧アクチュエータが異常であると判断し、第1の操作判断手段で第1の操作手段が操作されていないと判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていると判断され、かつ、流量検出手段の検出流量が第2の所定流量を超えていると判断されると、第2の油圧アクチュエータが異常であると判断する異常判断手段とを備えることを特徴とする。
(2) 請求項2の発明は、請求項1に記載の油圧装置において、ドレン流路は、油圧ポンプから排出されるドレンがさらに流通し、異常判断手段は、第1の操作判断手段で第1の操作手段が操作されていないと判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていないと判断され、かつ、流量検出手段の検出流量が第3の所定流量を超えていると判断されると、油圧ポンプが異常であると判断することを特徴とする。
(3) 請求項3の発明は、請求項1または請求項2に記載の油圧装置において、第1の所定流量と、第2の所定流量とは異なる流量であることを特徴とする。
【発明の効果】
【0006】
本発明によれば、複数の油圧アクチュエータから排出されるドレンが流通するドレン流路と、ドレン流路の流量を検出する流量検出手段とを設け、いずれか一つの油圧アクチュエータの操作手段だけが操作されていると判断され、かつ、流量検出手段の検出流量が所定流量を超えていると判断されると、当該操作に係る油圧アクチュエータが異常であると判断するように構成した。これにより、複数の油圧アクチュエータの異常の有無を判断するのに必要な流量検出手段が1つで済むので、流量検出手段の設置数を減らしてコストダウンできる。
【図面の簡単な説明】
【0007】
【図1】本実施の形態の作業機械の一例である移動式クレーン(クローラクレーン)の外観側面図である。
【図2】クレーンの油圧回路の概略を示す図である。
【図3】各油圧機器の異常有無検出機能に関する構成を示す図である。
【図4】各油圧機器から発生するドレン量に影響を及ぼす要因について説明する図である。
【図5】報知信号の出力処理の動作について説明するフローチャートである。
【発明を実施するための形態】
【0008】
図1〜5を参照して、本発明による油圧装置および作業機械の一実施の形態を説明する。図1は、本実施の形態の作業機械の一例である移動式クレーン(クローラクレーン)の外観側面図である。図1に示すように、移動式クレーン(以下、単にクレーンと呼ぶ)1は、履帯式の走行体101と、走行体101上に搭載された旋回可能な旋回体102と、旋回体102に起伏可能に支持されたブーム103とを有する。旋回体102にはウインチドラム(巻き取りドラム)105が搭載され、巻き取りドラム105の駆動によりワイヤロープ104が巻き上げまたは巻き下げられ、吊り荷(掘削用バケット等)106が昇降する。また、旋回体102には起伏ドラム107が搭載され、起伏ドラム107の駆動により起伏ロープ108が巻き上げまたは巻き下げられ、ブーム103が起伏される。109は、旋回体102に設けられたクレーン1の運転室である。
【0009】
図2は、本実施の形態のクレーン1の油圧回路の概略を示す図である。クレーン1には、エンジン11と、エンジン11で駆動される油圧ポンプ12と、作動油タンク13と、油圧ポンプ12からの圧油で駆動される各油圧アクチュエータ(走行モータ17,起伏モータ18、巻き上げモータ19)とが設けられている。油圧ポンプ12は可変容量型の油圧ポンプであり、不図示の傾転角度制御装置によって傾転角度が制御されることでポンプ容量が制御される。走行モータ17は、クレーン1を走行させるための油圧モータであり、走行モータ用コントロールバルブ14で流れが制御された油圧ポンプ12からの圧油によって駆動される。
【0010】
起伏モータ18は、起伏ドラム107を駆動させるための油圧モータであり、起伏モータ用コントロールバルブ15で流れが制御された油圧ポンプ12からの圧油によって駆動される。巻き上げモータ19は、巻き取りドラム105を駆動させるための油圧モータであり、巻き上げモータ用コントロールバルブ16で流れが制御された油圧ポンプ12からの圧油によって駆動される。
【0011】
走行モータ用コントロールバルブ14は、運転室109内に設けられた走行モータ用操作レバー21の操作方向および操作量に応じて制御される。起伏モータ用コントロールバルブ15は、運転室109内に設けられた起伏モータ用操作レバー22の操作方向および操作量に応じて制御される。巻き上げモータ用コントロールバルブ16は、運転室109内に設けられた巻き上げモータ用操作レバー23の操作方向および操作量に応じて制御される。
【0012】
すなわち、走行モータ用コントロールバルブ14は、走行モータ用操作レバー21の操作方向および操作量に応じて操作されるパイロット弁21aを介して供給される不図示のパイロットポンプからのパイロット圧油により制御される。起伏モータ用コントロールバルブ15は、起伏モータ用操作レバー22の操作方向および操作量に応じて操作されるパイロット弁22aを介して供給される不図示のパイロットポンプからのパイロット圧油により制御される。巻き上げモータ用コントロールバルブ16は、巻き上げモータ用操作レバー23の操作方向および操作量に応じて操作されるパイロット弁23aを介して供給される不図示のパイロットポンプからのパイロット圧油により制御される。
【0013】
各操作レバー21〜23の各パイロット弁21a〜23aと、各コントロールバルブ14〜16とを結ぶパイロット油圧配管には、それぞれ圧力センサ24〜26が設けられている。圧力センサ24は、走行モータ用操作レバー21の操作量に応じて制御される走行モータ用コントロールバルブ14に供給されるパイロット圧油の圧力を検出する。圧力センサ25は、起伏モータ用操作レバー22の操作量に応じて制御される起伏モータ用コントロールバルブ15に供給されるパイロット圧油の圧力を検出する。圧力センサ26は、巻き上げモータ用操作レバー23の操作量に応じて制御される巻き上げモータ用コントロールバルブ16に供給されるパイロット圧油の圧力を検出する。
【0014】
油圧ポンプ12、走行モータ17、起伏モータ18、および巻き上げモータ19から排出されるドレンは、全て1本のドレン配管27を経由して作動油タンク13に戻る。ドレン配管27には、ドレン配管27内を流れるドレン(作動油)の流量を検出する流量計(流量センサ)28が取り付けられている。
【0015】
図3は、油圧ポンプ12および各油圧アクチュエータ17〜19についての後述する異常有無検出機能に関する構成を示す図である。図3に示すように、クレーン1には、コントローラ31が設けられている。コントローラ31は、クレーン1の各部を制御するための制御装置であり、各種の演算を行うCPU31aや記憶装置であるメモリ31b、その他周辺機器等を有する。なお、本実施の形態の説明では、コントローラ31の機能に関し、油圧ポンプ12および各油圧アクチュエータ17〜19についての後述する異常有無検出機能について主に説明し、他の機能についての説明を省略する。
【0016】
コントローラ31には、上述した圧力センサ24〜26と、流量センサ28とが接続されている。また、コントローラ31には、圧力センサ42と、油温センサ43と、走行モータ圧力センサ47a,47bと、起伏モータ圧力センサ48a,48bと、巻き上げモータ圧力センサ49a,49bと、エンジン回転数センサ51と、傾転角センサ52とが接続されている。さらにコントローラ31には、報知装置32が接続されている。圧力センサ42は、油圧ポンプ12の圧油の吐出圧力を検出するセンサである。油温センサ43は、作動油の温度を検出するセンサである。
【0017】
走行モータ圧力センサ47a,47bは、走行モータ17に供給される圧油の圧力を検出するセンサであり、起伏モータ圧力センサ48a,48bは、起伏モータ18に供給される圧油の圧力を検出するセンサであり、巻き上げモータ圧力センサ49a,49bは、巻き上げモータ19に供給される圧油の圧力を検出するセンサである。なお、走行モータ17の回転方向に関わらず供給される圧油の圧力を検出するために、圧油が入出する2つのポートにそれぞれ接続される2本の配管のうち、一方の配管にセンサ47aが設けられ、他方の配管にセンサ47bが設けられている。起伏モータ圧力センサ48a,48bおよび巻き上げモータ圧力センサ49a,49bについても同様である。
【0018】
エンジン回転数センサ51は、エンジン11の回転速度を検出するセンサであるが、本実施の形態では、エンジン11の回転速度から油圧ポンプ12の回転速度を演算するためにも用いられる。傾転角センサ52は、油圧ポンプ12の傾転角度を検出するためのセンサである。報知装置32は、後述するように、各油圧機器12,17〜19に異常が有る旨をオペレータに報知するための装置である。報知装置32は、たとえば、クレーン1の各部の状態や作業状況等を表示する、運転室109内に設けられた表示モニタや、音声出力を行うスピーカなどである。
【0019】
本実施の形態では、コントローラ31は、次のようにして各油圧機器12,17〜19の異常の有無を検出する。そして、各油圧機器12,17〜19のいずれかの異常が検出されると、コントローラ31は、油圧機器の異常が検出された旨、および、どの油圧機器に異常が検出されたのかを示す情報を報知装置32に表示させる。なお、油圧機器の異常が検出された旨、および、どの油圧機器に異常が検出されたのかをスピーカを介して音声で出力するように構成してもよい。
【0020】
各油圧機器12,17〜19の積算稼働時間が長くなるほど、各油圧機器12,17〜19から発生するドレンの量は増加する。したがって、各油圧機器12,17〜19から発生するドレン量に基づいて、各油圧機器12,17〜19のメンテナンス時期や異常の有無が推定可能である。しかし、本実施の形態では、上述したように各油圧機器12,17〜19から発生するドレンは、全て1本のドレン配管27を経由して作動油タンク13に戻るように構成され、ドレン配管27に設けられた流量センサ28は、1つだけである。
【0021】
そこで、本実施の形態では、各油圧アクチュエータ17〜19のうち、いずれか1つだけが操作されている場合に、コントローラ31のCPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断する。そして、CPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、各油圧アクチュエータ17〜19のうち当該操作されている油圧アクチュエータに異常があるものと判断する。また、本実施の形態では、いずれの油圧アクチュエータ17〜19も操作されていない場合にも、コントローラ31のCPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断する。この場合、CPU31aは、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、油圧ポンプ12に異常があるものと判断する。ここで、各油圧機器12,17〜19に異常があるか否かの判断を行うための、上述した所定の流量の値(しきい値)は、各油圧機器12,17〜19毎に定められており、メモリ31bに記憶されている。
【0022】
なお、各油圧機器12,17〜19から発生するドレン量は、図4に示すように、複数の要因の影響を受ける。たとえば、各油圧アクチュエータ17〜19に供給される圧油の圧力が高ければ発生するドレン量は増える。なお、図4で圧力要因の条件として示した両高圧とは、油圧アクチュエータの圧油の入口ポートおよび出口ポートの双方の圧力が高くなる状態を指す。たとえば、2つの油圧アクチュエータが油圧回路上で直列に配設されているときに、当該2つの油圧アクチュエータが同時に操作(複合操作)されると、上流側の油圧アクチュエータの出口側ポートの圧力も高くなり、両高圧の状態となる。
【0023】
作動油温が高ければ、各油圧機器12,17〜19から発生するドレン量は多くなる。各油圧アクチュエータ(油圧モータ)17〜19の回転速度が高ければ、各油圧アクチュエータ17〜19から発生するドレン量は多くなる。油圧ポンプ12からの圧油の吐出量が多ければ、油圧ポンプ12から発生するドレン量は多くなる。各油圧アクチュエータ17〜19の操作のタイミングに関し、各油圧アクチュエータ17〜19が停止中である、または駆動速度が一定である場合(定常時)には、各油圧アクチュエータ17〜19から発生するドレン量は少なくなる。逆に、各油圧アクチュエータ17〜19を起動させるとき(起動時)および停止させるとき(停止時)には、各油圧アクチュエータ17〜19から発生するドレン量は多くなる。
【0024】
そこで、本実施の形態では、図4に例示したドレンの流量に影響を与える各要因(圧力、油温、モータ速度、ポンプ吐出量、操作のタイミング等)をパラメータとして、各油圧機器12,17〜19に異常があるか否かの判断を行うための各しきい値の値があらかじめ定められている。そして、各要因をパラメータとしたしきい値についてのテーブルが、各油圧機器12,17〜19毎にメモリ31bに記憶されている。以下の説明では、走行モータ17の異常有無の判断のためのしきい値を走行モータ用しきい値と呼び、起伏モータ18の異常有無の判断のためのしきい値を起伏モータ用しきい値と呼ぶ。また、巻き上げモータ19の異常有無の判断のためのしきい値を巻き上げモータ用しきい値と呼び、油圧ポンプ12の異常有無の判断のためのしきい値を油圧ポンプ用しきい値と呼ぶ。
【0025】
CPU31aは、各センサ24〜26,42,43,47a〜49b,51,52での検出値に基づいて、パラメータとなる各要因の値を演算し、対応するしきい値を読み込む。そして、CPU31aは、読み込んだしきい値と、流量センサ28で検出されるドレンの流量とを比較することで各油圧機器12,17〜19の異常の有無を判断する。
【0026】
すなわち、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、走行モータ17のみが操作(駆動)されていると判断すると、圧力センサ24の検出圧力から操作レバー21の操作量、すなわち走行モータ17の回転速度を推定(演算)する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ47a,47bで検出した走行モータ17へ供給される圧油の圧力を読み込む。また、CPU31aは、圧力センサ24の検出圧力の推移に基づいて、走行モータ17の操作のタイミングとして、上述した定常時であるのか、起動時であるのか、停止時であるのかを判断する。そして、CPU31aは、演算した走行モータ17の回転速度、各センサから読み込んだ油温や油圧、判断した走行モータ17の操作のタイミング等に基づいて、メモリ31bに記憶されている上述したテーブルから走行モータ用しきい値を読み込む。
【0027】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ走行モータ用しきい値を超えていると判断すると、走行モータ17に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、走行モータ17に異常がある旨が表示され、走行モータ17に異常がある旨の音声がスピーカから出力される。
【0028】
また、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、起伏モータ18のみが操作(駆動)されていると判断すると、圧力センサ25の検出圧力から操作レバー22の操作量、すなわち起伏モータ18の回転速度を推定(演算)する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ48a,48bで検出した起伏モータ18へ供給される圧油の圧力を読み込む。また、CPU31aは、圧力センサ25の検出圧力の推移に基づいて、起伏モータ18の操作のタイミングとして、上述した定常時であるのか、起動時であるのか、停止時であるのかを判断する。そして、CPU31aは、演算した起伏モータ18の回転速度、各センサから読み込んだ油温や油圧、判断した起伏モータ18の操作のタイミング等に基づいて、メモリ31bに記憶されている上述したテーブルから起伏モータ用しきい値を読み込む。
【0029】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ起伏モータ用しきい値を超えていると判断すると、起伏モータ18に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、起伏モータ18に異常がある旨が表示され、起伏モータ18に異常がある旨の音声がスピーカから出力される。
【0030】
また、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、巻き上げモータ19のみが操作(駆動)されていると判断すると、圧力センサ26の検出圧力から操作レバー23の操作量、すなわち巻き上げモータ19の回転速度を推定(演算)する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ49a,49bで検出した巻き上げモータ19へ供給される圧油の圧力を読み込む。また、CPU31aは、圧力センサ26の検出圧力の推移に基づいて、巻き上げモータ19の操作のタイミングとして、上述した定常時であるのか、起動時であるのか、停止時であるのかを判断する。そして、CPU31aは、演算した巻き上げモータ19の回転速度、各センサから読み込んだ油温や油圧、判断した巻き上げモータ19の操作のタイミング等に基づいて、メモリ31bに記憶されている上述したテーブルから巻き上げモータ用しきい値を読み込む。
【0031】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ巻き上げモータ用しきい値を超えていると判断すると、巻き上げモータ19に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、巻き上げモータ19に異常がある旨が表示され、巻き上げモータ19に異常がある旨の音声がスピーカから出力される。
【0032】
なお、CPU31aは、各圧力センサ24〜26の検出圧力に基づいて、いずれの操作レバー21〜23も操作されていないと判断すると、エンジン回転数センサ51で検出したエンジン11の回転速度から油圧ポンプ12の回転速度を演算する。また、CPU31aは、油温センサ43で検出した作動油温度、圧力センサ42で検出した油圧ポンプ12の吐出の圧力、傾転角センサ52で検出した油圧ポンプ12の傾転角度を読み込む。そして、CPU31aは、演算した油圧ポンプ12の回転速度、各センサから読み込んだ油温や油圧、傾転角度等に基づいて、メモリ31bに記憶されている上述したテーブルから油圧ポンプ用しきい値を読み込む。
【0033】
そして、CPU31aは、流量センサ28で検出されるドレンの流量が読み込んだ油圧ポンプ用しきい値を超えていると判断すると、油圧ポンプ12に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、油圧ポンプ12に異常がある旨が表示され、油圧ポンプ12に異常がある旨の音声がスピーカから出力される。
【0034】
図5は、上述した報知信号の出力処理の動作について説明するフローチャートである。クレーン1の不図示のイグニッションスイッチがオンされると、図5に示す処理を行うプログラムが起動されてCPU31aで実行される。ステップS1において、各センサ24〜26,42,43,47a〜49b,51,52での検出値を読み込んでステップS3へ進む。ステップS3において、各圧力センサ24〜26の検出値に基づいて、各油圧アクチュエータ17〜19のうち、いずれか1つだけが操作されているか否かを判断する。
【0035】
ステップS3が肯定判断されるとステップS5へ進み、ステップS1で読み込んだ検出値に基づいて、しきい値を読み込むために必要なパラメータである油圧アクチュエータの回転速度や操作のタイミングなどを算出してステップS7へ進む。ステップS7において、ステップS3の肯定判断に係る油圧アクチュエータについてのメモリ31bに記憶されているしきい値のテーブルから、ステップS1で読み込んだ検出値やステップS5で算出したパラメータに基づいて該当するしきい値を読み込んでステップS9へ進む。
【0036】
ステップS9において、流量センサ28で検出されるドレンの流量が、ステップS7で読み込んだしきい値を超えているか否かを判断する。ステップS9が肯定判断されるとステップS11へ進み、各油圧機器12,17〜19のうち、ステップS9または後述するステップS21の判断に係る油圧機器に異常がある旨を報知するための報知信号を報知装置32に出力してステップS13へ進む。
【0037】
ステップS13において、クレーン1の不図示のイグニッションスイッチがオフされたか否かを判断する。ステップS13が肯定判断されると本プログラムを終了する。ステップS13が否定判断されるとステップS1へ戻る。
【0038】
ステップS9が否定判断されるとステップS13へ進む。
【0039】
ステップS3が否定判断されるとステップS15へ進み、各圧力センサ24〜26の検出値に基づいて、全ての油圧アクチュエータ17〜19が操作されていないか否かを判断する。ステップS15が肯定判断されると(すなわち、全ての油圧アクチュエータ17〜19が操作されていない場合)ステップS17へ進み、ステップS1で読み込んだ検出値に基づいて、油圧ポンプ用しきい値を読み込むために必要なパラメータである油圧ポンプ12の回転速度などを算出してステップS19へ進む。ステップS19において、メモリ31bに記憶されている油圧ポンプ用しきい値のテーブルから、ステップS1で読み込んだ検出値やステップS17で算出したパラメータに基づいて該当する油圧ポンプ用しきい値を読み込んでステップS21へ進む。
【0040】
ステップS21において、流量センサ28で検出されるドレンの流量が、ステップS19で読み込んだ油圧ポンプ用しきい値を超えているか否かを判断する。ステップS21が肯定判断されるとステップS11へ進む。
【0041】
ステップS21が否定判断されるとステップS13へ進む。ステップS15が否定判断されるとステップS13へ進む。
【0042】
本実施の形態のクレーン1によれば、次の作用効果を奏する。
(1) 各油圧アクチュエータ17〜19のうち、いずれか1つだけが操作されている場合に、コントローラ31のCPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断するように構成した。そして、CPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、各油圧アクチュエータ17〜19のうち当該操作されている油圧アクチュエータに異常があるものと判断するように構成した。これにより、1つの流量センサ28でドレンの流量を検出することによって複数の油圧アクチュエータ17〜19の異常の有無を判断できるので、流量センサ28の設置数を減らしてコストダウンできる。
【0043】
(2) いずれの油圧アクチュエータ17〜19も操作されていない場合に、コントローラ31のCPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えたか否かを判断するように構成した。そして、CPU31aが、流量センサ28で検出されるドレンの流量が、あらかじめ定められた所定の流量を超えていると判断すると、油圧ポンプ12に異常があるものと判断するように構成した。これにより、油圧アクチュエータ17〜19の異常の有無の判断に加えて、油圧ポンプ12の異常の有無を判断できるようになるので、油圧装置の異常検出装置としての機能が向上し、各油圧機器12,17〜19のメンテナンスがしやすくなる。
【0044】
(3) 各油圧機器12,17〜19に異常があるか否かの判断を行うためのしきい値を、各油圧機器12,17〜19毎に定めてメモリ31bに記憶させるように構成した。これにより、異常の有無を各油圧機器12,17〜19に応じて適切に判断できるので、油圧装置の異常検出装置としての信頼性を向上できる。
【0045】
−−−変形例−−−
(1) 上述の説明では、各油圧機器12,17〜19の異常有無の判断のためのしきい値のパラメータとして上述した各要因を挙げているが、本発明はこれに限定されない。上述した各要因は一例であって、各油圧機器12,17〜19の異常有無の判断のためのしきい値のパラメータとして上述した要因以外の他の要因を考慮してもよい。また、上述の説明で例示した各要因のいずれかを判断しないようにしてもよい。たとえば、上述の説明では、作動油の温度を検出し、検出した作動油の温度を各油圧機器12,17〜19の異常有無の判断のためのしきい値のパラメータとしているが、本発明はこれに限定されない。すなわち、作動油の温度を検出せず、作動油の温度がある程度温まったと推定される、クレーン1の運転開始から所定時間T1が経過した後から、各油圧機器12,17〜19の異常有無の判断を行うように構成してもよい。また、上述の説明では、各操作レバー21〜23の操作量について考慮しているが、本発明はこれに限定されない。すなわち、圧力センサ24〜26に代えて、所定の圧力でオンオフの出力が変化する圧力スイッチを設け、各操作レバー21〜23の操作量について考慮せず、操作の有無のみを考慮するように構成してもよい。
【0046】
このように構成した場合、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、各圧力スイッチのうち、パイロット弁21aと走行モータ用コントロールバルブ14とを結ぶパイロット油圧配管に設けられた圧力スイッチのみがオンされているときに、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ走行モータ17の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、走行モータ17に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、走行モータ17に異常がある旨が表示され、走行モータ17に異常がある旨の音声がスピーカから出力される。
【0047】
また、このように構成した場合、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、各圧力スイッチのうち、パイロット弁22aと起伏モータ用コントロールバルブ15とを結ぶパイロット油圧配管に設けられた圧力スイッチのみがオンされているときに、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ起伏モータ18の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、起伏モータ18に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、起伏モータ18に異常がある旨が表示され、起伏モータ18に異常がある旨の音声がスピーカから出力される。
【0048】
また、このように構成した場合、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、各圧力スイッチのうち、パイロット弁23aと巻き上げモータ用コントロールバルブ16とを結ぶパイロット油圧配管に設けられた圧力スイッチのみがオンされているときに、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ巻き上げモータ19の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、巻き上げモータ19に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、巻き上げモータ19に異常がある旨が表示され、巻き上げモータ19に異常がある旨の音声がスピーカから出力される。
【0049】
なお、CPU31aは、クレーン1の運転開始から所定時間T1が経過した後、圧力センサ24〜26に代えて設けられた各圧力スイッチの全てがオフされているときに(すなわち、いずれの操作レバー21〜23も操作されていないときに)、流量センサ28で検出されるドレンの流量と、メモリ31bから読み込んだ油圧ポンプ12の異常有無の判断のためのしきい値とを比較する。そしてCPU31aは、検出されたドレンの流量が読み込んだ上記のしきい値を超えていると判断すると、油圧ポンプ12に異常がある旨を報知するための報知信号を報知装置32に出力する。これにより、たとえば、運転室109内に設けられた表示モニタに、油圧ポンプ12に異常がある旨が表示され、油圧ポンプ12に異常がある旨の音声がスピーカから出力される。
【0050】
(2) 上述の説明では、上述した各要因をパラメータとした各しきい値についてのテーブルをメモリ31bに記憶させているが、上述した各要因をパラメータとした各しきい値の算出式をメモリ31bに記憶させ、適宜しきい値を算出するように構成してもよい。
【0051】
(3) 上述の説明では、各油圧機器12,17〜19から発生するドレン量に基づいて各油圧機器12,17〜19の異常の有無を判断するように構成しているが、本発明はこれに限定されない。たとえば、各油圧機器12,17〜19から発生するドレン量に基づいて、各油圧機器12,17〜19のメンテナンスの要否を判断するように構成してもよく、各油圧機器12,17〜19のメンテナンス時期が近づいたか否かを判断するように構成してもよい。
【0052】
(4) 上述の説明では、ドレン配管27に流量計としての流量センサ28を設けてドレンの流量を検出するように構成しているが、本発明はこれに限定されない。たとえば、流量計に代えて流量スイッチをドレン配管27に設けるように構成してもよい。この場合、上述したしきい値が、油圧機器の相違にかかわらず1つの値となるため、図4に例示したドレンの流量に影響を与える上述した各要因(圧力、油温、モータ速度、ポンプ吐出量、操作のタイミング等)を加味した上で、各油圧機器12,17〜19の異常の有無を判断するように構成すればよい。たとえば、走行モータ17と起伏モータ18とでは、異常の有無を判断する際に当該モータの回転速度を考慮してもよい。
【0053】
具体的には、走行モータ17のみが操作されていると判断し、かつ、流量スイッチの出力からドレン量が所定の流量以上であると判断し、かつ、走行モータ17の回転速度があるしきい値A1未満である場合に走行モータ17に異常があると判断するように構成してもよい。そして、起伏モータ18のみが操作されていると判断し、かつ、流量スイッチの出力からドレン量が所定の流量以上であると判断し、かつ、起伏モータ18の回転速度があるしきい値A2未満である場合に起伏モータ18に異常があると判断するように構成してもよい。この場合、回転速度のしきい値A1と、回転速度のしきい値A2とが同じ値であってもよく、異なる値であっても良い。
【0054】
(5) 上述の説明では、油圧ポンプ12の異常の有無を判断するように構成しているが、油圧ポンプ12の異常の有無を判断することは必須ではない。また、異常の有無の判断に係る油圧アクチュエータの数は、2以上であればよい。
(6) 上述の説明では、油圧アクチュエータの例として、走行モータ17、起伏モータ18、および巻き上げモータ19を挙げているが、本発明はこれに限定されず、他の油圧モータ(たとえば旋回モータ)や、他の油圧アクチュエータ(たとえば油圧シリンダ)等に本発明を適用しても良い。
【0055】
(7) 上述の説明では、作業機械の一例である移動式クレーンを挙げているが、本発明はこれに限定されず、たとえば、油圧ショベルやホイールローダなど、他の作業機械に本発明を適用してもよい。
(8) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0056】
なお、本発明は、上述した実施の形態のものに何ら限定されず、油圧ポンプと、油圧ポンプからの圧油により駆動する少なくとも第1および第2の油圧アクチュエータと、第1の油圧アクチュエータを駆動させるために操作される第1の操作手段と、第2の油圧アクチュエータを駆動させるために操作される第2の操作手段と、第1の油圧アクチュエータから排出されるドレン、および、第2の油圧アクチュエータから排出されるドレンの双方が流通するドレン流路と、ドレン流路の流量を検出する流量検出手段と、第1の操作手段が操作されているか否かを判断する第1の操作判断手段と、第2の操作手段が操作されているか否かを判断する第2の操作判断手段と、第1の操作判断手段で第1の操作手段が操作されていると判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていないと判断され、かつ、流量検出手段の検出流量が第1の所定流量を超えていると判断されると、第1の油圧アクチュエータが異常であると判断し、第1の操作判断手段で第1の操作手段が操作されていないと判断され、かつ、第2の操作判断手段で第2の操作手段が操作されていると判断され、かつ、流量検出手段の検出流量が第2の所定流量を超えていると判断されると、第2の油圧アクチュエータが異常であると判断する異常判断手段とを備えることを特徴とする各種構造の油圧装置を含むものである。
【符号の説明】
【0057】
1 移動式クレーン(クローラクレーン、クレーン)、12 油圧ポンプ、14 走行モータ用コントロールバルブ、15 起伏モータ用コントロールバルブ、16 巻き上げモータ用コントロールバルブ、17 走行モータ、18 起伏モータ、19 巻き上げモータ、21 走行モータ用操作レバー、22 起伏モータ用操作レバー、23 巻き上げモータ用操作レバー、24〜26 圧力スイッチ、27 ドレン配管、28 流量計(流量センサ)、31 コントローラ、31a CPU、31b メモリ、32 報知装置
【特許請求の範囲】
【請求項1】
油圧ポンプと、
前記油圧ポンプからの圧油により駆動する少なくとも第1および第2の油圧アクチュエータと、
前記第1の油圧アクチュエータを駆動させるために操作される第1の操作手段と、
前記第2の油圧アクチュエータを駆動させるために操作される第2の操作手段と、
前記第1の油圧アクチュエータから排出されるドレン、および、前記第2の油圧アクチュエータから排出されるドレンの双方が流通するドレン流路と、
前記ドレン流路の流量を検出する流量検出手段と、
前記第1の操作手段が操作されているか否かを判断する第1の操作判断手段と、
前記第2の操作手段が操作されているか否かを判断する第2の操作判断手段と、
前記第1の操作判断手段で前記第1の操作手段が操作されていると判断され、かつ、前記第2の操作判断手段で前記第2の操作手段が操作されていないと判断され、かつ、前記流量検出手段の検出流量が第1の所定流量を超えていると判断されると、前記第1の油圧アクチュエータが異常であると判断し、前記第1の操作判断手段で前記第1の操作手段が操作されていないと判断され、かつ、前記第2の操作判断手段で前記第2の操作手段が操作されていると判断され、かつ、前記流量検出手段の検出流量が第2の所定流量を超えていると判断されると、前記第2の油圧アクチュエータが異常であると判断する異常判断手段とを備えることを特徴とする油圧装置。
【請求項2】
請求項1に記載の油圧装置において、
前記ドレン流路は、前記油圧ポンプから排出されるドレンがさらに流通し、
前記異常判断手段は、前記第1の操作判断手段で前記第1の操作手段が操作されていないと判断され、かつ、前記第2の操作判断手段で前記第2の操作手段が操作されていないと判断され、かつ、前記流量検出手段の検出流量が第3の所定流量を超えていると判断されると、前記油圧ポンプが異常であると判断することを特徴とする油圧装置。
【請求項3】
請求項1または請求項2に記載の油圧装置において、
前記第1の所定流量と、前記第2の所定流量とは異なる流量であることを特徴とする油圧装置。
【請求項1】
油圧ポンプと、
前記油圧ポンプからの圧油により駆動する少なくとも第1および第2の油圧アクチュエータと、
前記第1の油圧アクチュエータを駆動させるために操作される第1の操作手段と、
前記第2の油圧アクチュエータを駆動させるために操作される第2の操作手段と、
前記第1の油圧アクチュエータから排出されるドレン、および、前記第2の油圧アクチュエータから排出されるドレンの双方が流通するドレン流路と、
前記ドレン流路の流量を検出する流量検出手段と、
前記第1の操作手段が操作されているか否かを判断する第1の操作判断手段と、
前記第2の操作手段が操作されているか否かを判断する第2の操作判断手段と、
前記第1の操作判断手段で前記第1の操作手段が操作されていると判断され、かつ、前記第2の操作判断手段で前記第2の操作手段が操作されていないと判断され、かつ、前記流量検出手段の検出流量が第1の所定流量を超えていると判断されると、前記第1の油圧アクチュエータが異常であると判断し、前記第1の操作判断手段で前記第1の操作手段が操作されていないと判断され、かつ、前記第2の操作判断手段で前記第2の操作手段が操作されていると判断され、かつ、前記流量検出手段の検出流量が第2の所定流量を超えていると判断されると、前記第2の油圧アクチュエータが異常であると判断する異常判断手段とを備えることを特徴とする油圧装置。
【請求項2】
請求項1に記載の油圧装置において、
前記ドレン流路は、前記油圧ポンプから排出されるドレンがさらに流通し、
前記異常判断手段は、前記第1の操作判断手段で前記第1の操作手段が操作されていないと判断され、かつ、前記第2の操作判断手段で前記第2の操作手段が操作されていないと判断され、かつ、前記流量検出手段の検出流量が第3の所定流量を超えていると判断されると、前記油圧ポンプが異常であると判断することを特徴とする油圧装置。
【請求項3】
請求項1または請求項2に記載の油圧装置において、
前記第1の所定流量と、前記第2の所定流量とは異なる流量であることを特徴とする油圧装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−76444(P2013−76444A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−217242(P2011−217242)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(503032946)日立住友重機械建機クレーン株式会社 (104)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(503032946)日立住友重機械建機クレーン株式会社 (104)
【Fターム(参考)】
[ Back to top ]