
油圧駆動式の車両、およびその制御方法と装置
【課題】エンジンからの動力をHST(可変容量型油圧ポンプと油圧モータを接続した閉回路)を介して駆動輪へ伝えるように構成された車両、例えばフォークリフトにおいて、発進又は加速のために急激で大きなアクセル操作が行われた場合に燃費の悪化と過度な加速を防ぐ。
【解決手段】HST21を有するパワートレイン10を備えたフォークリフト1では、アクセル操作制御部15aが、実際のアクセル操作量5aを入力し、実際のアクセル操作量5aの時間当たり増加率の所定の制限値に制限してなる制御用アクセル操作量11bを生成する。実際のアクセル操作量5aの急激な増加時に、制御用アクセル操作量11bはそれよりゆるやかに増加する。エンジンコントローラ11は、その制御用アクセル操作量15cに基づいてエンジン13を制御する。
【解決手段】HST21を有するパワートレイン10を備えたフォークリフト1では、アクセル操作制御部15aが、実際のアクセル操作量5aを入力し、実際のアクセル操作量5aの時間当たり増加率の所定の制限値に制限してなる制御用アクセル操作量11bを生成する。実際のアクセル操作量5aの急激な増加時に、制御用アクセル操作量11bはそれよりゆるやかに増加する。エンジンコントローラ11は、その制御用アクセル操作量15cに基づいてエンジン13を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、油圧駆動式の車両(例えば、フォークリフト)およびその制御に関する。
【背景技術】
【0002】
エンジンと、そのエンジンにより駆動される油圧ポンプと、その油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置(例えば駆動輪)とを有する車両が知られている(例えば特許文献1)。その典型的例は、産業車両や農業機械や建設機械に見られる。その種の車両では、例えば、そのパワートレイン(走行用の動力伝達装置)において、静液圧トランスミッション(Hydrostatic Transmission)(以下、HSTという)が、エンジンからの動力を駆動輪に伝えるために使用される。一般的なこととして、HSTは、閉油圧回路を構成するように相互接続された、可変容量型の油圧ポンプ(以下、「HSTポンプ」という)と可変又は固定容量型の油圧モータ(以下、「HSTモータ」という)を有する。HSTは、その原理上、トルクコンバータに代表されるHDT(Hydrodynamic Transmission)に比べて、エネルギーのロスが非常に小さく、無段階に変速でき、また、制動機能も有するなどの利点がある。
【0003】
車両のパワートレインに組み込まれたHSTは、エンジンからの動力を、次のようにして車両の駆動輪へ伝達する。エンジンが駆動されると、エンジンに機械的に接続されたHSTポンプが駆動される。そのHSTポンプからHSTモータに作動油が供給されることにより、HSTモータが回転する。さらに、HSTモータが車両の駆動輪を駆動して回転させる。
【0004】
HSTを有する車両は、さらにコントロールシステムを有している。近年は電子式のコントロールシステムが好んで採用されている。そのコントロールシステムは、車両に備えられたアクセルペダル等のアクセル操作に応答して、エンジンへの燃料噴射量と、HSTポンプの容量とを制御する。それにより、HSTポンプの圧力と流量が制御され、車両の駆動輪のトルクや回転速度が制御される。
【0005】
特許文献1に開示されたコントロールシステムは、車両速度が低速域にあるときの燃費性能の向上と車速応答性の向上を目的として、アクセル操作量が所定の制限値より小さいか大きいかを判断し、アクセル操作量が所定の制限値より小さいときには、アクセル操作量の変化に応じたエンジンの回転速度の変化率が比較小さくなるように、また、アクセル操作量が所定の制限値より大きいときときには、アクセル操作量の変化によるエンジンの回転速度の変化率が比較的大きくなるように、エンジンを制御する。また、このコントロールシステムは、エンジンの回転速度に応じてHSTポンプの容量を制御する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−301016号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
HSTを有する車両の典型例として、フォークリフトがあげられる。フォークリフトを発進させる又は大きく加速させる時、運転者は、急激に大きなアクセル操作(典型的には、一気に最大限までアクセルペダルを踏み込む)をすることがある。
【0008】
しかしながら、HSTを有するフォークリフトの場合、そのような急激で大きなアクセル操作が行われると、次の2つの問題が生じる。その一つは、実際の燃費が、その車両の設計に期待された燃費より悪化することである。もう一つは、運転者に対して車両が「飛び出す」と感じるような過度の加速が生じる点である。「飛び出す」と感じるような加速は、積荷の荷崩れやフォーク上に荷を積む際のアプローチし難さといった不都合を生じさせる。
【0009】
これらの問題は、フォークリフトに限らず他の種類の車両に関しても発生するであろう。しかし、フォークリフトの場合、荷取り作業などの際に頻繁に停止と発進を繰り返すことが多く、また、安全や積荷の損傷防止のため、フォークリフトがフォークで運んでいる荷物への余計な衝撃や荷崩れを避ける必要がある。それゆえ、上記の2つの問題の解決は、フォークリフトにおいて特に重要なものである。
【0010】
従って、本発明の目的は、HSTに代表されるような油圧式の動力伝達を通じて、負荷装置への動力を伝達するように構成された油圧駆動式の車両、例えばフォークリフトにおいて、発進時又は低速走行状態からの加速時など急激で大きなアクセル操作が行われた場合でも燃費の悪化と強すぎる過度の加速を防ぐことにある。
【課題を解決するための手段】
【0011】
本発明の一実施形態に従って提供される車両は、エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置(例えば駆動輪)とを有する車両であって、実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御手段と、前記アクセル操作制御手段からの前記制御用アクセル操作量に応じて、前記制御用アクセル操作量が大きいほど、同一のエンジン出力トルクが得られるエンジン回転速度が高くなるように、前記エンジンを制御するエンジン制御手段とを備える。
【0012】
この車両によれば、車両の急発進または急加速のためにアクセルペダルが急激に踏み込まれて、実際のアクセル操作量が急激に(特に、上記所定の上限値より高い時間当たり増加率で)増加した場合でも、エンジンの制御に用いられる制御用アクセル操作量は、実際のアクセル操作量よりゆっくりと(つまり、上記上限値に相当する時間当たり増加率で)増加することになる。このゆっくりした制御用アクセル操作量の増加に伴って、エンジンの回転速度は、油圧ポンプの吸収トルクの上昇が追従できる程度の時間当たり増加率で上昇する。したがって、油圧ポンプの吸収トルクは、エンジン回転速度の上昇に伴って、期待された通りの上昇特性ラインに沿って増加する。結果として、発進時のエンジンの回転速度の過度な上昇が抑えられ、燃費が改善し、また、過度の加速も改善される。
【0013】
また、本発明の一実施形態に従えば、前記アクセル操作制御手段は、前記実際のアクセル操作量と、前記制御用アクセル操作量に前記制限値を加算した値とを比較し、小さい方の値を新たな前記制御用アクセル操作量として出力するように構成されることができる。あるいは、変形例として、前記アクセル操作制御手段は、前記実際のアクセル操作量と、前記制御用アクセル操作量とを比較し、前者が後者より大きければ、前記制御用アクセル操作量に前記制限値を加算した値を新たな前記制御用アクセル操作量として出力し、そうでなければ、前者を新たな前記制御用アクセル操作量として出力するように構成されてもよい。
【0014】
このように構成された車両によれば、比較や加算などの簡単な演算処理で、上記制御用アクセル操作量を生成することができる。
【0015】
また、本発明の一実施形態では、前記制限値は、前記制限値に相当する時間当たり増加率で前記制御用アクセル操作量が増加したことによって引き起こされる前記エンジン回転速度の増加に対して、前記HSTポンプの容量の増加が追従できる範囲内に設定されている。
【0016】
これにより、急発進や急加速のためにアクセルペダルが急激に深く踏まれた場合でも、エンジン回転速度の上昇速度に良好に追従して油圧ポンプの吸収トルクが、その設計に期待された増加特性ラインに沿って増加し、過度なエンジンの回転速度の上昇(いわゆるエンジンの「吹き上がり」)による燃費悪化を防止することができる。
【0017】
また、本発明の一実施形態では、前記制限値は、現在の前記実際のアクセル操作量に応じて、現在の前記実際のアクセル操作量が大きいほど前記制限値が大きくなるように設定される。
【0018】
これにより、実際のアクセル操作量が大きければ、制御用アクセル操作量の時間当たり増加量も高くなるので、運転者の意図に応じたエンジンの制御ができる。
【0019】
本発明の一実施形態は、フォークリフトとして構成することができる。フォークリフトでは、発進時にアクセルペダルが急激に大きく踏まれた場合、エンジンの回転速度の上昇を抑えることによる低燃費効果と、過度な加速度(飛び出し感)を抑制する効果を、確実に得ることができる。
【0020】
本発明は、油圧駆動式の車両のための制御方法及び制御装置も提供する。
【発明の効果】
【0021】
本発明によれば、HSTに代表されるような油圧式の動力伝達を通じて、負荷装置への動力を伝達するように構成された油圧駆動式の車両、例えばフォークリフト、において、発進時又は低速走行状態からの加速時など急激で大きなアクセル操作が行われた場合の燃費の悪化と過度な加速を低減することができる。
【図面の簡単な説明】
【0022】
【図1】フォークリフトの概略的な外観を示す側面図。
【図2】HSTを有するパワートレインの一構成例を示すブロック線図(パワートレインに隣接する幾つかのシステムも一緒に示されている)。
【図3】HSTを有するパワートレインを備えた車両、典型的にはフォークリフト、のエンジンとHSTポンプの回転速度−トルク特性を示すグラフ。
【図4】本発明の一実施形態にかかる車両が備えるパワートレインの機能的な構成例を示すブロック線図。
【図5】本実施形態において、実際のアクセル操作量が急激に増加した場合の制御用アクセル操作量の増加の様子を示すグラフ。
【図6】本実施形態におけるアクセル操作量の時間当たり増加率の制限値の設定例を示すグラフ。
【図7】時間経過に伴う実際のアクセル操作量5aの変化の一例と、それに応じた制御用アクセル操作量11bの変化の一例を示すグラフ。
【図8】制御用アクセル操作量を決定するための処理を示すフローチャート。
【図9】制御用アクセル操作量を決定するための処理の変形例を示すフローチャート。
【発明を実施するための形態】
【0023】
本発明の実施形態の説明に入る前に、フォークリフトを例にとり、先述した急発進又は急加速を行うときに生じる2つの問題について説明する。
【0024】
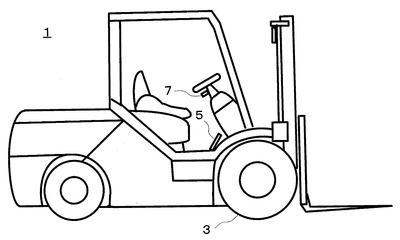
図1は、フォークリフトの概略的な外観を示す。図1に示すように、フォークリフト1は、駆動輪3、アクセルペダル5、および前後進切替レバー7などを有する。
【0025】
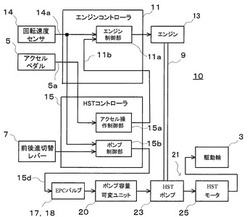
図2は、油圧駆動式の車両(例えばフォークリフト)のパワートレイン(走行用の動力伝達機構)、特にHSTを有する、パワートレインの一構成例を示す(同図には、パワートレインだけでなく、これに隣接する幾つかのシステムも示されている)。
【0026】
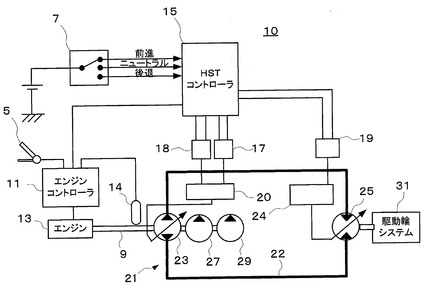
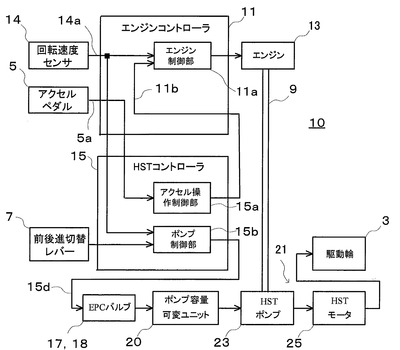
図2に示すように、パワートレイン10は、アクセルペダル5、前後進切替レバー7、エンジン13、エンジンコントローラ11、HST21、HSTコントローラ15、駆動輪システム(ディファレンシャル、車軸及び駆動輪)31などを有する。HST21は、可変容量型のHSTポンプ23(典型的には、斜板式可変容量型ポンプが用いられる)と、可変又は固定容量型(図示の例では可変容量型)のHSTモータ25を有し、両者23と25は作動油が流れる油圧配管22を介して相互接続されて閉油圧回路を構成している。HSTポンプ23はエンジン13の出力軸9に接続されており、エンジン13によって駆動されて回転する。HSTポンプ23から作動油がHSTモータ25に供給されることにより、HSTモータ25が駆動されて回転する。そして、HSTモータ25の出力軸に駆動輪システム31が接続されており、HSTモータ25が駆動輪3を駆動して回転させる。なお、エンジン13の出力軸9には、HSTポンプ23だけでなく、他の油圧ポンプ(例えば、フォークリフトの場合、フォークの昇降やチルトを行うための油圧ポンプ27や、ブレーキ装置を駆動するための油圧ポンプ29など)も接続され得る。エンジン13には、ガソリンエンジン、ディーゼルエンジンまたはLPGエンジンなど、種々の燃料で駆動されるものが採用され得る。
【0027】
このようなパワートレイン10の構成例の下で、従来から行われている制御動作の一例を以下に説明する。
【0028】
運転者によるアクセルペダル5の操作量(実際のアクセル操作量)が、アクセルペダル5に設けられた図示しないセンサ(例えばポテンショメータ)により、電気信号として検出される。また、エンジン13の回転速度が、エンジン13の出力軸9に設けられた回転速度センサ14により、電気信号として検出される。エンジンコントローラ11には、アクセルペダル5からの実際のアクセル操作量の検出信号と、回転速度センサ14からの回転速度の検出信号とが入力される。エンジンコントローラ11は、検出されたアクセル操作量とエンジン回転速度に応答してエンジン13への燃料噴射量を制御し、それにより、エンジン13の出力トルクを制御する。また、エンジンコントローラ11は、回転速度センサ14で検出されたエンジン回転速度の検出信号を、HSTコントローラ15に送信する。
【0029】
HSTコントローラ15は、回転速度センサ14からエンジンコントローラ11を通じて受信されたエンジン回転速度の検出信号に基づき、HSTポンプ23の最大吸収トルクを決定し、その最大吸収トルクを指示する最大吸収トルク指令を、電気信号の形でHSTポンプ用EPC(Electric Proportional Control:電子比例制御)バルブ17、18に出力する。ここで、一方のEPCバルブ17は、前後進切替レバー7により前進が選択されときに機能する前進用EPCバルブ17であり、もう一方のEPCバルブ18は、前後進切替レバー7により後進が選択されときに機能する後進用EPC18バルブである。ポンプ用EPCバルブ17、18は、HSTコントローラ15から入力された最大吸収トルク指令を、電気信号として受けて動作し、HSTポンプ容量可変ユニット20を油圧駆動する。HSTポンプ容量可変ユニット20は、HSTポンプ23の吸収トルクが、上記最大吸収トルク指令によって指示された最大吸収トルクを上限とした範囲内で適切な値になるように、HSTポンプ23の容量(典型的には、斜板の角度)を制御する。
【0030】
なお、図示の例では、HSTモータ25の容量もHSTコントローラ15からの指令でモータ用EPCバルブ19及びHSTモータ容量可変ユニット24を通じて制御されるが、ここでは、その詳細の説明は省略する。
【0031】
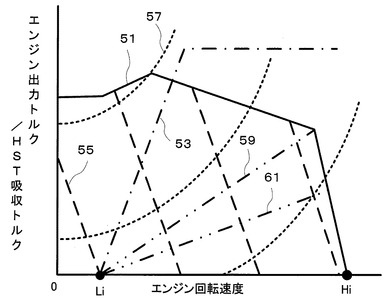
図3は、HST21を有するパワートレイン10を備えた車両、典型的にはフォークリフト、のエンジン13とHSTポンプ23の回転速度−トルク特性の典型例を示す。
【0032】
実線の特性ライン(最大出力トルク特性ライン)51は、エンジン13が有するその回転速度に応じたその最大出力トルクの典型的な特性例を示す。ここで、エンジン13の最大出力トルクとは、アクセル操作量が最大であるフルスロットルの状態で、エンジン13が出力可能な最大のトルクを意味する。
【0033】
動作点Liは、ローアイドル点(すなわち、エンジン13が最低回転速度で稼働し、アクセル操作量がゼロで、駆動輪3への伝達トルクもゼロのときの動作点)である。動作点Hiは、ハイアイドル点(すなわち、エンジンが最高回転速度で稼働し、アクセル操作量が最大で、駆動輪3への伝達トルクがゼロのときの動作点)である。
【0034】
一点鎖線の特性ライン(最大吸収トルク特性ライン)53は、図2を参照して説明したようにHSTコントローラ15によって決定される、エンジン回転速度に応じたHSTポンプ23の最大吸収トルクの典型的特性例を示す。HSTコントローラ15は、最大吸収トルク特性ライン53上の現在のエンジン回転速度に対応したトルク値を、最大吸収トルク指令として出力する。それにより、HSTポンプ23の吸収トルクが最大吸収トルク特性ライン53以下の範囲内で制御される。HSTポンプ23の時々の吸収トルクは、最大吸収トルク特性ライン53以下の範囲内で、駆動輪3にかかる負荷の大きさに応じて変わる。しかし、フォークリフトが発進する時には、駆動輪3にかかる負荷がかなり大きいので、HSTポンプ23の吸収トルクは、最大吸収トルク特性ライン53上の値か又はそれに近い値になることが多い。
【0035】
破線の特性ライン(出力トルク特性ライン)55は、実際のアクセル操作量が一定であるときの、エンジン13の回転速度に応じたエンジン13の出力トルクの典型的な特性例を示す。すなわち、図2を参照して説明したように、エンジンコントローラ11が、アクセル操作量とエンジン回転速度に応じて、エンジン13への燃料噴射量を制御する。それにより、エンジン出力トルクが、時々のアクセル操作量に対応した図中の1つの出力トルク特性ライン55に沿うように制御される。このような制御は、いわゆる、オール・スピード・ガバナ(ASG)の制御であって、アクセル操作量が大きくなると、出力トルク特性ライン55が図中の右の方へ移動していく。すなわち、アクセル操作量が大きくなると、同じエンジン回転速度ではエンジン出力トルクが大きくなり、また、同じ出力トルクが要求される条件下では、エンジン回転速度が上昇していく。なお、フォークリフトや建設機械におけるASGの制御の一つの特徴として、出力トルク特性ライン55の勾配(トルクの変化の回転速度の変化に対する比率)が、図示のように大きい値に設定される。これにより、外部からの負荷が大幅に急に変動しても(トルクが大幅に急に変動しても)、エンジン回転速度の変動が小さく、負荷変動の多いフォークリフトや建設機械にとって、高い作業性を確保できる。このように出力トルク特性ライン55の勾配が大きく設定されている場合、アクセル操作量に応じてエンジン回転速度がほぼ決まることになり、アクセル操作量が大きいほどエンジン回転速度が高くなる。
【0036】
点線の特性ライン(燃費特性ライン)57は、エンジン13の燃費がある値で一定であるという条件下での、エンジン回転速度に応じたエンジン出力トルクの典型的な特性例を示す。燃費特性ライン57が図3中の、より左上の方に位置するほど、燃費が良くなり、逆に、特性ライン57が図3中の、より右下の方に位置するほど、燃費が悪くなる。
【0037】
さて、ここで、図2を参照して、従来の制御動作について、アクセル操作量がゼロでフォークリフトが停止している状態から、発進する場合を想定して、説明する。最初、エンジン13の動作点は、図3中のローアイドル点Liにある。次に、フォークリフトを発進するために、運転者が一気にアクセルペダル5を最大限まで踏み込んだとする。このアクセル操作量の急激な増大に応答して、エンジンコントローラ11が、エンジン13のスロットル開度又は燃料噴射量を急激に増加させる。それにより、エンジン13の出力トルク特性ライン55が、最初のローアイドル点Liを通る位置から、一気に図中の右へ移動していく(つまり、エンジン出力トルクが増大する)。その結果として生じた余剰トルクにより、エンジン13の回転速度が上昇する。エンジン13の回転速度の上昇に伴って、HSTコントローラ15が、HSTポンプ23の最大吸収トルク指令を、特性ライン53に沿って増大させる。それにより、HSTポンプ23の容量が増大する。
【0038】
発進時には、駆動輪3にかかる負荷がかなり大きいので、HSTポンプ23の吸収トルクは、最大吸収トルク特性ライン53上の値か又はそれに近い値になることが多い。したがって、エンジン13とHSTポンプ23のマッチング動作点は、最初のローアイドル点Liから、HSTポンプ23の最大吸収トルク特性ライン53に沿って、図3中の右上の方へ移行する筈である。結果として、エンジン13の回転速度はあまり高い値までは上昇せずに、エンジン13のトルクが急速に上昇して、比較的に燃費の良い動作領域内で、発進が行われる筈である。
【0039】
ところが、実際には、上記のような期待通りの結果が生じない。
【0040】
すなわち、HSTコントローラ15から最大吸収トルク指令が出た後、実際にHSTポンプ23の容量がその指令に基づいた期待通りの値に変わるまでの間に、無視できない時間遅れが存在する。この時間遅れの結果として、実際のHSTポンプ23の吸収トルクの上昇特性ラインは、図3中の二点鎖線の特性ライン59のようになり、最大吸収トルク特性ライン53よりゆるやかな勾配をもつものとなる。その結果として、エンジン13の回転速度が一気に非常に高い値にまで上昇し、これに対し、HSTポンプ23の吸収トルクはゆるやかに上昇することになる。したがって、発進時の実際の燃費は、車両の設計に期待された燃費よりも悪くなる。つまり、いわゆる、エンジンの噴き上がりが発生してしまい、燃料が無駄に消費されてしまう。これが、前述した従来技術の1番目の問題である。
【0041】
従来技術の2番目の問題は次のとおりである。比較のため、HST21ではなくてトルクコンバータを有するパワートレイン10を備えたフォークリフトにおいて、発進時に上述したような急激で大きなアクセル操作が行われた場合における、トルクコンバータの吸収トルクの上昇特性ラインを、図3中のもう一つの二点鎖線の特性ライン61で示す。トルク上昇特性ライン61に示されたトルクコンバータの吸収トルクの上昇は、特性ライン59に示されたHSTポンプ23よりも、更に緩やかな勾配をもつものとなる。しかしながら、フォークリフトの発進時には、このトルク上昇特性ライン61に示されるようなゆるやかな吸収トルク上昇の方が、むしろ適当な大きさの加速度を発生させることになる。その理由は、トルク特性ライン61に示されるようなゆるやかなトルク上昇が、フォーク上に支持されている荷物に余計な衝撃が加わる、荷崩れが生じるなどの事故を防ぐことになるからである。したがって、トルク上昇特性ライン59に示されるHSTポンプ23の吸収トルクの上昇特性では、HSTを有するフォークリフトは、トルクコンバータを有するフォークリフトに比べて、その発進時に過度な加速が生じてしまうおそれがある。
【0042】
以上の説明により、従来技術における2つの問題の発生メカニズムを説明した。なお、上述した2つの問題は、発進時だけでなく、低速走行状態から加速するときにも発生することは明らかであろう。
【0043】
次に、本発明の一実施形態に係る車両について説明する。
【0044】
本実施形態の車両(典型的にはフォークリフト)も、図2に示された構成をもつパワートレイン10を備える。ただし、本実施形態では、図2に示されたエンジンコントローラ11及びHSTコントローラ15は、図2を参照しつつ既に説明した従来の制御動作とは異なる制御動作を行う。本実施形態における制御動作は、エンジンコントローラ11及びHSTコントローラ15にそれぞれ組み込まれたコンピュータが、そこに記憶されているコンピュータ・プログラムを実行することによって実現することもできるし、あるいは、エンジンコントローラ11及びHSTコントローラ15に組み込まれたワイヤード・ロジック回路によって実現することもできるし、あるいは、コンピュータ・プログラムの実行とワイヤード・ロジック回路との組み合わせによって実現することもできる。
【0045】
図4は、本実施形態に係る車両が備えるパワートレイン10の構成例を示している。
【0046】
エンジンコントローラ11及びHSTコントローラ15は、それぞれ、後述する制御動作を行うようプログラムされたCPU、メモリ及びその他の付属回路等から構成される。図4に示すように、エンジンコントローラ11は、エンジン制御部11aを有する。エンジンコントローラ11のエンジン制御部11aには、回転速度センサ14により検出されたエンジン回転速度14aとアクセル制御部15aから出力される制御用アクセル操作量11bとが入力される。そして、エンジン制御部11a(特にそのASG)は、アクセル操作制御部15aからの制御用アクセル操作量11bが大きいほど、同じ出力トルクが出力されるエンジン回転速度が上昇するように(換言すれば、制御用アクセル操作量11bが大きいほど、図3中でエンジン出力トルク特性ライン55が右へシフトするように、より簡単に述べれば、制御用アクセル操作量11bが増えればエンジン回転速度が上昇するように)、制御用アクセル操作量11bおよびエンジン回転速度14aに応じてエンジン13の燃料噴射量を制御する。
【0047】
ここで、上記の制御用アクセル操作量11bについて、簡単に説明する。運転者がフォークリフトを発進または加速させるためにアクセルペダル5を急激に踏み込んだ場合、実際のアクセル操作量5aはアクセルペダル5の急激な踏み込みに即応して非常に高い時間当たり増加率で増加するのに対し、HSTコントローラ15で生成される制御用アクセル操作量11bは、予め設定された制限された時間当たり増加率で増加する。したがって、この場合には、制御用アクセル操作量11bは実際のアクセル操作量5aよりゆっくりと増加する。この制御用アクセル操作量11bに基づいて、エンジン制御部11aがエンジン13を制御することになる。
【0048】
また、HSTコントローラ15は、アクセル操作制御部15aとポンプ制御部15bとを有する。HSTコントローラ15のアクセル操作制御部15aには、アクセルペダル5で検出された実際のアクセル操作量5aが入力される。(ここで、本実施形態では、実際のアクセル操作量5aはエンジンコントローラ11に入力されて、そこからHSTコントローラ15に通知されるが、これは単なる例示にすぎず、実際のアクセル操作量5aが直接的にHSTコントローラ15に入力されてもよい。)アクセル操作制御部15aは、実際のアクセル操作量5aに基づいて、制御用アクセル操作量11bを生成する。その生成方法は後に説明する。
【0049】
HSTコントローラ15のポンプ制御部15bには、回転速度センサ14で検出されたエンジン回転速度14と、前後進切替レバー7で選択された前進、ニュートラル又は後進の指令が入力される。(ここで、本実施形態では、エンジン回転速度14aはエンジンコントローラ11に入力されて、そこからHSTコントローラ15に通知されるが、これは単なる例示にすぎず、エンジン回転速度14aが直接的にHSTコントローラ15に入力されてもよい。)ポンプ制御部15bは、図3に示した最大吸収トルク特性ライン53に従って、エンジン回転速度14aが高いほどHSTポンプ23の最大吸収トルクが高くなるように、エンジン回転速度14aに応じてHSTポンプ23の最大吸収トルクを決定し、その最大吸収トルク指令をHSTポンプ用EPCバルブ17,18に出力する。その最大吸収トルク指令に基づいてHSTポンプ23の容量が制御される。
【0050】
ところで、図4に示されたエンジンコントローラ11とHSTコントローラ15の構成は、説明のための一例にすぎず、それとは異なる構成が採用されてもよい。例えば、上述したアクセル操作制御部15aが、HSTコントローラ15ではなく、エンジンコントローラ11内に存在してもよいし、或いは、アクセル操作制御部15aの一部分がHSTコントローラ15内に存在し、他の部分がエンジンコントローラ11内に存在してもよい。あるいは、エンジンコントローラ11とHSTコントローラ15が単一のコントローラとして構成されてもよい。しかし、以下の説明は、図4に示された構成に基づいて行う。
【0051】
次に、上述したHSTコントローラ15のアクセル操作制御部15aについて、より詳細に説明する。
【0052】
HSTコントローラ15のアクセル操作制御部15aは、実際のアクセル操作量5aに基づいて、制御用アクセル操作量11bを生成する。制御用アクセル操作量11bは、以下に示す時間区間では、実際のアクセル操作量5aより小さく、それ以外のときには、実際のアクセル操作量5aと等しい。この時間区間(つまり、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなる時間区間)は、制御用アクセル操作量11bが実際のアクセル操作量5aと今まで等しかったところで、実際のアクセル操作量が、予め設定された制限値より高い時間当たり増加率で増加を開始した時点で開始される。実際のアクセル操作量5aは上記制限値より高い時間当たり増加率で増加するのに対し、制御用アクセル操作量11bは上記制限値に相当する時間当たり増加率で(実際のアクセル操作量5aよりもゆるやかに)増加する。そのため、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなる。その後、制御用アクセル操作量11bが増加していって実際のアクセル操作量5aに到達した時点で、制御用アクセル操作量11bの増加が停止し、この時間区間が終わる。制御用アクセル操作量11bが実際のアクセル操作量5aに一旦等しくなると、以後は、実際のアクセル操作量5aが再び上記制限値より高い時間当たり増加率で増加しない限り(換言すれば、実際のアクセル操作量5aが一定であっても、低下しても、上記制限値以下の時間当たり増加率で増加しても)、制御用アクセル操作量11bは実際のアクセル操作量5aと等しい値になる。
【0053】
要するに、制御用アクセル操作量11bは、実際のアクセル操作量5aの時間当たり増加率を、所定の制限値に制限することで得られる値である、ということができる。発進または加速のために瞬時に実際のアクセル操作量5aが急増した場合、エンジン制御部11aへ与えられる制御用アクセル操作量11bは、それよりゆるやかに増加する。したがって、この場合、HSTポンプ23の吸収トルクは、制御用アクセル操作量11bのゆるやかにした増加に良好に追従して、図3に示された最大吸収トルク特性ライン53にほぼ沿って上昇する。結果として、エンジン13は燃費の比較的に良い領域(図3中の比較的に低速のエンジン回転速度で高い出力トルクの領域)で動作することができる。また、フォークリフトを急発進又は急加速させるとき、エンジン回転速度が高くはならないので、過度な加速の問題も改善される。
【0054】
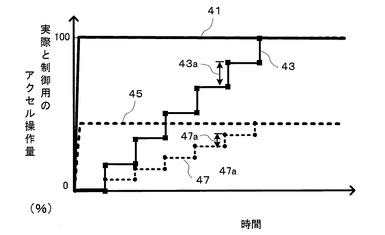
図5は、実際のアクセル操作量5aが上記制限値より高い時間当たり増加率で増加したときの制御用アクセル操作量11bの増加の様子を例示している。
【0055】
例えば、実際のアクセル操作量5aと制御用アクセル操作量11bがともに0%である状態から、実際のアクセル操作量5aが特性ライン41に示すように、0%から100%まで一気に高い時間当たり増加率で増加した場合を想定する。これは、例えば、運転者がアクセルペダルを0%から最大限100%まで一気に踏み込んだ場合である。この場合、制御用アクセル操作量11bは、特性ライン43に示すように、予め設定された制限値に相当する時間当たり増加率(図示の例では、100ミリ秒のような単位時間当たりの増加ステップ43a)で、実際のアクセル操作量5aよりもゆるやかに増加していき、そして、実際のアクセル操作量5a(例えば100%)に到達すると、増加を停止する。
【0056】
次に、実際のアクセル操作量5aが特性ライン45に示すように、0%から40%の間で、一気に高い時間当たり増加率で増加した場合を想定する。これは、例えば、運転者がアクセルペダルを0%から40%まで一気に踏み込んだ場合である。この場合、制御用アクセル操作量11bは、特性ライン47に示すように、予め設定された制限値に相当する時間当たり増加率(図示の例では単位時間当たりの増加ステップ47aで、実際のアクセル操作量5aよりもゆるやかに増加していき、その後、実際のアクセル操作量5a(例えば40%)に到達すると、増加を停止する。
【0057】
ここで、上記制限値は、現在の実際のアクセル操作量5aの大小に関わらず一定値に設定されてもよいし、あるいは、図5に示された例のように、現在の実際のアクセル操作量5aに応じて可変に設定されてもよい。
【0058】
そこで、図6を参照して、現在の実際のアクセル操作量5aに応じて上記制限値を可変に設定する場合の設定例を説明する。
【0059】
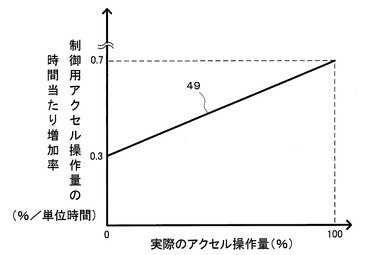
図6に特性ライン(制限値特性ライン)49で例示するように、現在の実際のアクセル操作量5aが大きくなるほど、制限値(つまり、アクセル操作量の時間当たり増加率)も大きくなるように、現在の実際のアクセル操作量5aに応じて、制限値が設定される。例えば、現在の実際のアクセル操作量5aが100%の場合の制限値は0.7%/単位時間であり、現在の実際のアクセル操作量5aが40%の場合の制限値は0.46%/単位時間である、というようにである。一般に、運転者は、アクセルペダルを大きく踏み込むほど、すばやく、制御用アクセル操作量11bが増加して、フォークリフトが発進又は加速することを望む。それゆえに、図6に示されるように、実際のアクセル操作量5aが大きいほど、制限値(つまり、アクセル操作量の時間当たり増加率)が大きな値になるように、制限値特性ライン49が設定されている。
【0060】
図6に示されたような制限値特性ライン49は、HSTコントローラ15のアクセル操作制御部15aに、例えば、制限値を決定するためのファンクションまたはルックアップテーブルとして、実装することができる。
【0061】
ここで、図6に示された制限値特性ライン49によれば、上記制限値は実際のアクセル操作量に対してリニアに増加するが、必ずしもそうである必要はなく、ノンリニアに増加してもよい。いずれにしても、この制限値は、その制限値に相当する時間当たり増加率で制御用アクセル操作量11bが増加したことによって引き起こされるエンジン回転速度の増加に、HSTポンプ23の動作(特に容量の増加)が十分に追従するような、低い時間当たり増加率の範囲内で設定される。
【0062】
図6に示された制限値を用いた場合、実際のアクセル操作量が図5に示された例のように、一気に高速に或る値まで増えた場合(いわゆる、アクセルペダルの「一気踏み」の場合)には、制御用アクセル操作量は、前記或る値に対応する一定の時間当たり増加率で増加していくことになる。他方、実際のアクセル操作量が時間をかけて増える場合(いわゆる、アクセルペダルの「踏み増し」の場合)には、制御用アクセル操作量は、逐次に上昇していく時間当たり増加率で増加していくことになる。
【0063】
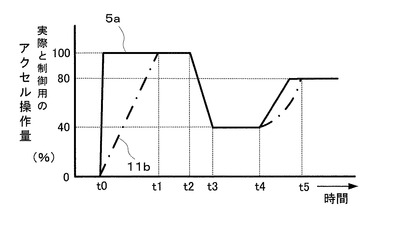
図7は、時間経過に伴う実際のアクセル操作量5aの変化の一例と、それに応じた制御用アクセル操作量11bの変化の一例を示している。
【0064】
例えば、実際のアクセル操作量5aが、時刻t0から、HSTポンプ23の動作が遅れずに追従することができないような高い(つまり、予め設定された制限値より高い)時間当たり増加率で増加したとする(例えば、アクセルペダル5を最大量踏み込んだ発進あるいは加速が行われた場合)。すると、制御用アクセル操作量11bが、上に述べた制限値に相当する時間当たり増加率で増加する。その時間当たり増加率(つまり制限値)は、前述したように、HSTポンプ23の動作が遅れずに追従できる低い値である。したがって、制御用アクセル操作量11bは、実際のアクセル操作量5aよりもゆるやかに増加する。
【0065】
その後、例えば時刻t1で、制御用アクセル操作量11bが現在の実際のアクセル操作量5aに到達すると、制御用アクセル操作量11bの増加が止まる。
【0066】
その後、実際のアクセル操作量5aが再び制限値より高い時間当たり増加率で増加しなければ、すなわち、例えば、実際のアクセル操作量5aが一定(例えば、時間区間t1〜t2、t3〜t4)であるか、減少(例えば、時間区間t2〜t3)するか、あるいは制限値以下の時間当たり増加率で増加するならば、制御用アクセル操作量11bは実際のアクセル操作量5aと等しい値になる。
【0067】
さらに、例えば時刻t4において、HSTポンプ23が遅れずに追従することができない高い時間当たり増加率で実際のアクセル操作量5aが再び増加したとすると、制御用アクセル操作量11bは再び制限値に相当する(つまり、HSTポンプ23の動作が遅れなしに追従できるように低い)時間当たり増加率で現在の実際のアクセル操作量5aに向かって増加する。
【0068】
このように、実際のアクセル操作量5aが、HSTポンプ23の動作が遅れずに追従することができないような高い時間当たり増加率で増加したときには、必ず、制御用アクセル操作量11bは、HSTポンプ23の動作が遅れずに追従できる低い時間当たり増加率で増加する。
【0069】
上記のような制御用アクセル操作量11bを生成するために、HSTコントローラ15のアクセル操作制御部15aは、例えば図8に示すような処理を行うことができる。
【0070】
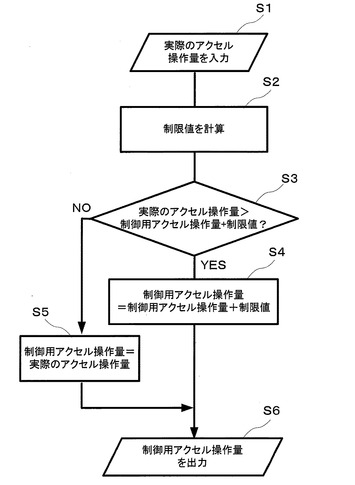
すなわち、アクセル操作制御部15aには、ステップS1で、現在の実際のアクセル操作量5aが入力され、ステップS2で、現在の実際のアクセル操作量5aに基づいて、図6に例示されたような制限値特性ライン49に従い、制御用アクセル操作量の制限値(つまり、制限された時間当たり増加率)を決定する。アクセル操作制御部15aは、ステップS3で、制御用アクセル操作量11bにステップS2で得た制限値を加算した値と、実際のアクセル操作量5aとを比較し、その結果、上記加算値が現在の実際のアクセル操作量5aより小さければ(ステップS3でYES)、ステップS4で、その加算値を新たな制御用アクセル操作量とする。これは、制御用アクセル操作量11bを、ステップ2で決定された制限値に相当する時間当たり増加率で、実際のアクセル操作量5aに向かって増加させることを意味する。また、ステップS3の結果、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなければ(つまり、等しいか、大きければ)(ステップS3でNO)、アクセル操作制御部15aは、ステップS5で、現在の実際のアクセル操作量5aを新たな制御用アクセル操作量11bとする。これは、制御用アクセル操作量11bを現在の実際のアクセル操作量5aに一致させることを意味する。そして、アクセル操作制御部15aは、ステップS6で、上記のようにして決定された新たなアクセル操作量5aを、エンジンコントローラ11へ出力する。
【0071】
以上の処理の結果、制御用アクセル操作量11bが実際のアクセル操作量5aと等しい状態から、実際のアクセル操作量5aが減少するか又は制限値以下の時間当たり増加率で増加した場合には、制御用アクセル操作量11bは実際のアクセル操作量5aとともに変化してそれと等しい状態を維持する。例えば、実際のアクセル操作量5aが制限値より高い時間当たり増加率で増加した場合には、制御用アクセル操作量11bは、上記制限値に相当する時間当たり増加率(つまり、実際のアクセル操作量5aよりもゆっくりと)で増加する。
【0072】
変形例として、アクセル操作制御部15aは、上記図8に示された処理に変えて、図9に示すような処理を行うこともできる。
【0073】
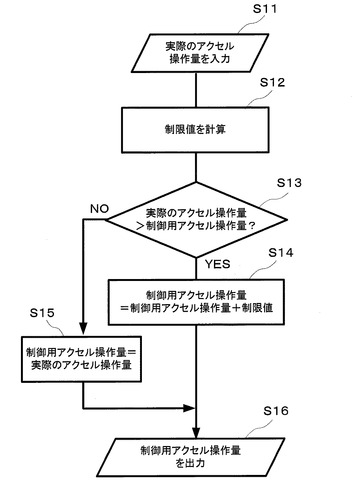
すなわち、アクセル操作制御部15aには、ステップS11で、現在の実際のアクセル操作量5aが入力され、ステップS12で、現在の実際のアクセル操作量5aに基づいて、図6に例示されたような制限値特性ライン49に従い、制御用アクセル操作量の制限値(つまり、制限された時間当たり増加率)を決定する。アクセル操作制御部15aは、ステップS13で、制御用アクセル操作量11bと実際のアクセル操作量5aとを比較し、その結果、現在の制御用アクセル操作量11bが現在の実際のアクセル操作量5aより小さければ、ステップS14で、現在の制御用アクセル操作量に、ステップS12で決定された時間当たり増加率(上記制限値)を加算して、その加算値を新たな制御用アクセル操作量とする。これは、制御用アクセル操作量11bを、ステップ12で決定された制限値(制限された時間当たり増加率)で増加させることを意味する。また、ステップS13の結果、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなければ(つまり、等しいか、大きければ)、アクセル操作制御部15aは、ステップS15で、現在の実際のアクセル操作量5aを新たな制御用アクセル操作量11bとする。これは、制御用アクセル操作量11bを現在の実際のアクセル操作量5aに一致させることを意味する。そして、アクセル操作制御部15aは、ステップS16で、上記のようにして決定された新たなアクセル操作量5aを、エンジンコントローラ11へ出力する。
【0074】
再び、図4を参照する。エンジンコントローラ11のエンジン制御部11aは、制御用アクセル操作量11bに応じて、図3に示された最大吸収トルク特性ライン53に沿うように、HSTポンプ23の最大吸収トルクを制御する。したがって、発進または加速のために実際のアクセル操作量5aが急増した場合、制御用アクセル操作量11bは、HSTポンプ23が追従動作できるような低い時間当たり増加率で増加する。よって、この場合、HSTポンプ23の実際の吸収トルクは、制御用アクセル操作量11bのゆるやかな増加に良好に追従して、図3に示された最大吸収トルク特性ライン53にほぼ沿って上昇する。結果として、エンジン13のいわゆる吹き上がりがなく、エンジン13は燃費の比較的に良い領域(図3中の比較的に低速のエンジン回転速度で高いエンジン出力トルクの領域)で動作することができる。また、エンジン回転速度もあまり高い値までは上昇しないので、発進時の過度な加速の問題も改善される。
【0075】
特にフォークリフトでは、本実施形態にかかるパワートレイン10が適用された場合に前述した2つの問題点が解消される効果は明確である。本実施形態にかかるパワートレイン10を搭載したフォークリフトは、そのようなアクセルぺダル操作が発進時に行われても、発進時の飛び出し感(過度の加速感)が少なく、かつ、低燃費効果を得ることができる。
【0076】
以上、本発明の好適な実施形態を説明したが、これは本発明の説明のための例示であり、本発明の範囲をこの実施形態にのみ限定する趣旨ではない。本発明は、その要旨を逸脱しない範囲で、上記実施形態とは異なる種々の態様で実施することができる。例えば、上記実施形態のエンジンコントローラ11とHSTコントローラ15がもつ複数の機能は、単一のコントローラで集中的に行われてもよいし、あるいは、より多くのコントローラによって分散して行われてもよい。また、上記実施形態のエンジンコントローラ11の一部の機能が、HSTコントローラ15に移されてもよいし、あるいは、上記実施形態のHSTコントローラ15の一部の機能が、エンジンコントローラ11に移されてもよい。また、フォークリフトに限らず、ホイールローダやクレーン車等の荷役車両において、本発明を適用することにより、同様な課題を解決することができる。さらに、エンジンからの動力を油圧ポンプと油圧モータを介して駆動輪に使えるように構成された車両だけでなく、エンジンからの動力を油圧ポンプと油圧モータを介して何らかの回転駆動を必要とする装置へ伝達するように構成された産業機械にも、本発明は適用可能である。
【符号の説明】
【0077】
1 フォークリフト
3 駆動輪
5 アクセルペダル
5a 実際のアクセル操作量
7 前後進切替レバー
9 出力軸
10 車両
11 エンジンコントローラ
11a エンジン制御部
11b 制御用アクセル操作量
13 エンジン
14 回転速度センサ
15 HSTコントローラ
15a アクセル操作制御部
15b ポンプ制御部
17、18 HSTポンプ用EPCバルブ
20 ポンプ容量可変ユニット
21 HST
23 HSTポンプ
25 HSTモータ
31 駆動輪システム
【技術分野】
【0001】
本発明は、油圧駆動式の車両(例えば、フォークリフト)およびその制御に関する。
【背景技術】
【0002】
エンジンと、そのエンジンにより駆動される油圧ポンプと、その油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置(例えば駆動輪)とを有する車両が知られている(例えば特許文献1)。その典型的例は、産業車両や農業機械や建設機械に見られる。その種の車両では、例えば、そのパワートレイン(走行用の動力伝達装置)において、静液圧トランスミッション(Hydrostatic Transmission)(以下、HSTという)が、エンジンからの動力を駆動輪に伝えるために使用される。一般的なこととして、HSTは、閉油圧回路を構成するように相互接続された、可変容量型の油圧ポンプ(以下、「HSTポンプ」という)と可変又は固定容量型の油圧モータ(以下、「HSTモータ」という)を有する。HSTは、その原理上、トルクコンバータに代表されるHDT(Hydrodynamic Transmission)に比べて、エネルギーのロスが非常に小さく、無段階に変速でき、また、制動機能も有するなどの利点がある。
【0003】
車両のパワートレインに組み込まれたHSTは、エンジンからの動力を、次のようにして車両の駆動輪へ伝達する。エンジンが駆動されると、エンジンに機械的に接続されたHSTポンプが駆動される。そのHSTポンプからHSTモータに作動油が供給されることにより、HSTモータが回転する。さらに、HSTモータが車両の駆動輪を駆動して回転させる。
【0004】
HSTを有する車両は、さらにコントロールシステムを有している。近年は電子式のコントロールシステムが好んで採用されている。そのコントロールシステムは、車両に備えられたアクセルペダル等のアクセル操作に応答して、エンジンへの燃料噴射量と、HSTポンプの容量とを制御する。それにより、HSTポンプの圧力と流量が制御され、車両の駆動輪のトルクや回転速度が制御される。
【0005】
特許文献1に開示されたコントロールシステムは、車両速度が低速域にあるときの燃費性能の向上と車速応答性の向上を目的として、アクセル操作量が所定の制限値より小さいか大きいかを判断し、アクセル操作量が所定の制限値より小さいときには、アクセル操作量の変化に応じたエンジンの回転速度の変化率が比較小さくなるように、また、アクセル操作量が所定の制限値より大きいときときには、アクセル操作量の変化によるエンジンの回転速度の変化率が比較的大きくなるように、エンジンを制御する。また、このコントロールシステムは、エンジンの回転速度に応じてHSTポンプの容量を制御する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−301016号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
HSTを有する車両の典型例として、フォークリフトがあげられる。フォークリフトを発進させる又は大きく加速させる時、運転者は、急激に大きなアクセル操作(典型的には、一気に最大限までアクセルペダルを踏み込む)をすることがある。
【0008】
しかしながら、HSTを有するフォークリフトの場合、そのような急激で大きなアクセル操作が行われると、次の2つの問題が生じる。その一つは、実際の燃費が、その車両の設計に期待された燃費より悪化することである。もう一つは、運転者に対して車両が「飛び出す」と感じるような過度の加速が生じる点である。「飛び出す」と感じるような加速は、積荷の荷崩れやフォーク上に荷を積む際のアプローチし難さといった不都合を生じさせる。
【0009】
これらの問題は、フォークリフトに限らず他の種類の車両に関しても発生するであろう。しかし、フォークリフトの場合、荷取り作業などの際に頻繁に停止と発進を繰り返すことが多く、また、安全や積荷の損傷防止のため、フォークリフトがフォークで運んでいる荷物への余計な衝撃や荷崩れを避ける必要がある。それゆえ、上記の2つの問題の解決は、フォークリフトにおいて特に重要なものである。
【0010】
従って、本発明の目的は、HSTに代表されるような油圧式の動力伝達を通じて、負荷装置への動力を伝達するように構成された油圧駆動式の車両、例えばフォークリフトにおいて、発進時又は低速走行状態からの加速時など急激で大きなアクセル操作が行われた場合でも燃費の悪化と強すぎる過度の加速を防ぐことにある。
【課題を解決するための手段】
【0011】
本発明の一実施形態に従って提供される車両は、エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置(例えば駆動輪)とを有する車両であって、実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御手段と、前記アクセル操作制御手段からの前記制御用アクセル操作量に応じて、前記制御用アクセル操作量が大きいほど、同一のエンジン出力トルクが得られるエンジン回転速度が高くなるように、前記エンジンを制御するエンジン制御手段とを備える。
【0012】
この車両によれば、車両の急発進または急加速のためにアクセルペダルが急激に踏み込まれて、実際のアクセル操作量が急激に(特に、上記所定の上限値より高い時間当たり増加率で)増加した場合でも、エンジンの制御に用いられる制御用アクセル操作量は、実際のアクセル操作量よりゆっくりと(つまり、上記上限値に相当する時間当たり増加率で)増加することになる。このゆっくりした制御用アクセル操作量の増加に伴って、エンジンの回転速度は、油圧ポンプの吸収トルクの上昇が追従できる程度の時間当たり増加率で上昇する。したがって、油圧ポンプの吸収トルクは、エンジン回転速度の上昇に伴って、期待された通りの上昇特性ラインに沿って増加する。結果として、発進時のエンジンの回転速度の過度な上昇が抑えられ、燃費が改善し、また、過度の加速も改善される。
【0013】
また、本発明の一実施形態に従えば、前記アクセル操作制御手段は、前記実際のアクセル操作量と、前記制御用アクセル操作量に前記制限値を加算した値とを比較し、小さい方の値を新たな前記制御用アクセル操作量として出力するように構成されることができる。あるいは、変形例として、前記アクセル操作制御手段は、前記実際のアクセル操作量と、前記制御用アクセル操作量とを比較し、前者が後者より大きければ、前記制御用アクセル操作量に前記制限値を加算した値を新たな前記制御用アクセル操作量として出力し、そうでなければ、前者を新たな前記制御用アクセル操作量として出力するように構成されてもよい。
【0014】
このように構成された車両によれば、比較や加算などの簡単な演算処理で、上記制御用アクセル操作量を生成することができる。
【0015】
また、本発明の一実施形態では、前記制限値は、前記制限値に相当する時間当たり増加率で前記制御用アクセル操作量が増加したことによって引き起こされる前記エンジン回転速度の増加に対して、前記HSTポンプの容量の増加が追従できる範囲内に設定されている。
【0016】
これにより、急発進や急加速のためにアクセルペダルが急激に深く踏まれた場合でも、エンジン回転速度の上昇速度に良好に追従して油圧ポンプの吸収トルクが、その設計に期待された増加特性ラインに沿って増加し、過度なエンジンの回転速度の上昇(いわゆるエンジンの「吹き上がり」)による燃費悪化を防止することができる。
【0017】
また、本発明の一実施形態では、前記制限値は、現在の前記実際のアクセル操作量に応じて、現在の前記実際のアクセル操作量が大きいほど前記制限値が大きくなるように設定される。
【0018】
これにより、実際のアクセル操作量が大きければ、制御用アクセル操作量の時間当たり増加量も高くなるので、運転者の意図に応じたエンジンの制御ができる。
【0019】
本発明の一実施形態は、フォークリフトとして構成することができる。フォークリフトでは、発進時にアクセルペダルが急激に大きく踏まれた場合、エンジンの回転速度の上昇を抑えることによる低燃費効果と、過度な加速度(飛び出し感)を抑制する効果を、確実に得ることができる。
【0020】
本発明は、油圧駆動式の車両のための制御方法及び制御装置も提供する。
【発明の効果】
【0021】
本発明によれば、HSTに代表されるような油圧式の動力伝達を通じて、負荷装置への動力を伝達するように構成された油圧駆動式の車両、例えばフォークリフト、において、発進時又は低速走行状態からの加速時など急激で大きなアクセル操作が行われた場合の燃費の悪化と過度な加速を低減することができる。
【図面の簡単な説明】
【0022】
【図1】フォークリフトの概略的な外観を示す側面図。
【図2】HSTを有するパワートレインの一構成例を示すブロック線図(パワートレインに隣接する幾つかのシステムも一緒に示されている)。
【図3】HSTを有するパワートレインを備えた車両、典型的にはフォークリフト、のエンジンとHSTポンプの回転速度−トルク特性を示すグラフ。
【図4】本発明の一実施形態にかかる車両が備えるパワートレインの機能的な構成例を示すブロック線図。
【図5】本実施形態において、実際のアクセル操作量が急激に増加した場合の制御用アクセル操作量の増加の様子を示すグラフ。
【図6】本実施形態におけるアクセル操作量の時間当たり増加率の制限値の設定例を示すグラフ。
【図7】時間経過に伴う実際のアクセル操作量5aの変化の一例と、それに応じた制御用アクセル操作量11bの変化の一例を示すグラフ。
【図8】制御用アクセル操作量を決定するための処理を示すフローチャート。
【図9】制御用アクセル操作量を決定するための処理の変形例を示すフローチャート。
【発明を実施するための形態】
【0023】
本発明の実施形態の説明に入る前に、フォークリフトを例にとり、先述した急発進又は急加速を行うときに生じる2つの問題について説明する。
【0024】
図1は、フォークリフトの概略的な外観を示す。図1に示すように、フォークリフト1は、駆動輪3、アクセルペダル5、および前後進切替レバー7などを有する。
【0025】
図2は、油圧駆動式の車両(例えばフォークリフト)のパワートレイン(走行用の動力伝達機構)、特にHSTを有する、パワートレインの一構成例を示す(同図には、パワートレインだけでなく、これに隣接する幾つかのシステムも示されている)。
【0026】
図2に示すように、パワートレイン10は、アクセルペダル5、前後進切替レバー7、エンジン13、エンジンコントローラ11、HST21、HSTコントローラ15、駆動輪システム(ディファレンシャル、車軸及び駆動輪)31などを有する。HST21は、可変容量型のHSTポンプ23(典型的には、斜板式可変容量型ポンプが用いられる)と、可変又は固定容量型(図示の例では可変容量型)のHSTモータ25を有し、両者23と25は作動油が流れる油圧配管22を介して相互接続されて閉油圧回路を構成している。HSTポンプ23はエンジン13の出力軸9に接続されており、エンジン13によって駆動されて回転する。HSTポンプ23から作動油がHSTモータ25に供給されることにより、HSTモータ25が駆動されて回転する。そして、HSTモータ25の出力軸に駆動輪システム31が接続されており、HSTモータ25が駆動輪3を駆動して回転させる。なお、エンジン13の出力軸9には、HSTポンプ23だけでなく、他の油圧ポンプ(例えば、フォークリフトの場合、フォークの昇降やチルトを行うための油圧ポンプ27や、ブレーキ装置を駆動するための油圧ポンプ29など)も接続され得る。エンジン13には、ガソリンエンジン、ディーゼルエンジンまたはLPGエンジンなど、種々の燃料で駆動されるものが採用され得る。
【0027】
このようなパワートレイン10の構成例の下で、従来から行われている制御動作の一例を以下に説明する。
【0028】
運転者によるアクセルペダル5の操作量(実際のアクセル操作量)が、アクセルペダル5に設けられた図示しないセンサ(例えばポテンショメータ)により、電気信号として検出される。また、エンジン13の回転速度が、エンジン13の出力軸9に設けられた回転速度センサ14により、電気信号として検出される。エンジンコントローラ11には、アクセルペダル5からの実際のアクセル操作量の検出信号と、回転速度センサ14からの回転速度の検出信号とが入力される。エンジンコントローラ11は、検出されたアクセル操作量とエンジン回転速度に応答してエンジン13への燃料噴射量を制御し、それにより、エンジン13の出力トルクを制御する。また、エンジンコントローラ11は、回転速度センサ14で検出されたエンジン回転速度の検出信号を、HSTコントローラ15に送信する。
【0029】
HSTコントローラ15は、回転速度センサ14からエンジンコントローラ11を通じて受信されたエンジン回転速度の検出信号に基づき、HSTポンプ23の最大吸収トルクを決定し、その最大吸収トルクを指示する最大吸収トルク指令を、電気信号の形でHSTポンプ用EPC(Electric Proportional Control:電子比例制御)バルブ17、18に出力する。ここで、一方のEPCバルブ17は、前後進切替レバー7により前進が選択されときに機能する前進用EPCバルブ17であり、もう一方のEPCバルブ18は、前後進切替レバー7により後進が選択されときに機能する後進用EPC18バルブである。ポンプ用EPCバルブ17、18は、HSTコントローラ15から入力された最大吸収トルク指令を、電気信号として受けて動作し、HSTポンプ容量可変ユニット20を油圧駆動する。HSTポンプ容量可変ユニット20は、HSTポンプ23の吸収トルクが、上記最大吸収トルク指令によって指示された最大吸収トルクを上限とした範囲内で適切な値になるように、HSTポンプ23の容量(典型的には、斜板の角度)を制御する。
【0030】
なお、図示の例では、HSTモータ25の容量もHSTコントローラ15からの指令でモータ用EPCバルブ19及びHSTモータ容量可変ユニット24を通じて制御されるが、ここでは、その詳細の説明は省略する。
【0031】
図3は、HST21を有するパワートレイン10を備えた車両、典型的にはフォークリフト、のエンジン13とHSTポンプ23の回転速度−トルク特性の典型例を示す。
【0032】
実線の特性ライン(最大出力トルク特性ライン)51は、エンジン13が有するその回転速度に応じたその最大出力トルクの典型的な特性例を示す。ここで、エンジン13の最大出力トルクとは、アクセル操作量が最大であるフルスロットルの状態で、エンジン13が出力可能な最大のトルクを意味する。
【0033】
動作点Liは、ローアイドル点(すなわち、エンジン13が最低回転速度で稼働し、アクセル操作量がゼロで、駆動輪3への伝達トルクもゼロのときの動作点)である。動作点Hiは、ハイアイドル点(すなわち、エンジンが最高回転速度で稼働し、アクセル操作量が最大で、駆動輪3への伝達トルクがゼロのときの動作点)である。
【0034】
一点鎖線の特性ライン(最大吸収トルク特性ライン)53は、図2を参照して説明したようにHSTコントローラ15によって決定される、エンジン回転速度に応じたHSTポンプ23の最大吸収トルクの典型的特性例を示す。HSTコントローラ15は、最大吸収トルク特性ライン53上の現在のエンジン回転速度に対応したトルク値を、最大吸収トルク指令として出力する。それにより、HSTポンプ23の吸収トルクが最大吸収トルク特性ライン53以下の範囲内で制御される。HSTポンプ23の時々の吸収トルクは、最大吸収トルク特性ライン53以下の範囲内で、駆動輪3にかかる負荷の大きさに応じて変わる。しかし、フォークリフトが発進する時には、駆動輪3にかかる負荷がかなり大きいので、HSTポンプ23の吸収トルクは、最大吸収トルク特性ライン53上の値か又はそれに近い値になることが多い。
【0035】
破線の特性ライン(出力トルク特性ライン)55は、実際のアクセル操作量が一定であるときの、エンジン13の回転速度に応じたエンジン13の出力トルクの典型的な特性例を示す。すなわち、図2を参照して説明したように、エンジンコントローラ11が、アクセル操作量とエンジン回転速度に応じて、エンジン13への燃料噴射量を制御する。それにより、エンジン出力トルクが、時々のアクセル操作量に対応した図中の1つの出力トルク特性ライン55に沿うように制御される。このような制御は、いわゆる、オール・スピード・ガバナ(ASG)の制御であって、アクセル操作量が大きくなると、出力トルク特性ライン55が図中の右の方へ移動していく。すなわち、アクセル操作量が大きくなると、同じエンジン回転速度ではエンジン出力トルクが大きくなり、また、同じ出力トルクが要求される条件下では、エンジン回転速度が上昇していく。なお、フォークリフトや建設機械におけるASGの制御の一つの特徴として、出力トルク特性ライン55の勾配(トルクの変化の回転速度の変化に対する比率)が、図示のように大きい値に設定される。これにより、外部からの負荷が大幅に急に変動しても(トルクが大幅に急に変動しても)、エンジン回転速度の変動が小さく、負荷変動の多いフォークリフトや建設機械にとって、高い作業性を確保できる。このように出力トルク特性ライン55の勾配が大きく設定されている場合、アクセル操作量に応じてエンジン回転速度がほぼ決まることになり、アクセル操作量が大きいほどエンジン回転速度が高くなる。
【0036】
点線の特性ライン(燃費特性ライン)57は、エンジン13の燃費がある値で一定であるという条件下での、エンジン回転速度に応じたエンジン出力トルクの典型的な特性例を示す。燃費特性ライン57が図3中の、より左上の方に位置するほど、燃費が良くなり、逆に、特性ライン57が図3中の、より右下の方に位置するほど、燃費が悪くなる。
【0037】
さて、ここで、図2を参照して、従来の制御動作について、アクセル操作量がゼロでフォークリフトが停止している状態から、発進する場合を想定して、説明する。最初、エンジン13の動作点は、図3中のローアイドル点Liにある。次に、フォークリフトを発進するために、運転者が一気にアクセルペダル5を最大限まで踏み込んだとする。このアクセル操作量の急激な増大に応答して、エンジンコントローラ11が、エンジン13のスロットル開度又は燃料噴射量を急激に増加させる。それにより、エンジン13の出力トルク特性ライン55が、最初のローアイドル点Liを通る位置から、一気に図中の右へ移動していく(つまり、エンジン出力トルクが増大する)。その結果として生じた余剰トルクにより、エンジン13の回転速度が上昇する。エンジン13の回転速度の上昇に伴って、HSTコントローラ15が、HSTポンプ23の最大吸収トルク指令を、特性ライン53に沿って増大させる。それにより、HSTポンプ23の容量が増大する。
【0038】
発進時には、駆動輪3にかかる負荷がかなり大きいので、HSTポンプ23の吸収トルクは、最大吸収トルク特性ライン53上の値か又はそれに近い値になることが多い。したがって、エンジン13とHSTポンプ23のマッチング動作点は、最初のローアイドル点Liから、HSTポンプ23の最大吸収トルク特性ライン53に沿って、図3中の右上の方へ移行する筈である。結果として、エンジン13の回転速度はあまり高い値までは上昇せずに、エンジン13のトルクが急速に上昇して、比較的に燃費の良い動作領域内で、発進が行われる筈である。
【0039】
ところが、実際には、上記のような期待通りの結果が生じない。
【0040】
すなわち、HSTコントローラ15から最大吸収トルク指令が出た後、実際にHSTポンプ23の容量がその指令に基づいた期待通りの値に変わるまでの間に、無視できない時間遅れが存在する。この時間遅れの結果として、実際のHSTポンプ23の吸収トルクの上昇特性ラインは、図3中の二点鎖線の特性ライン59のようになり、最大吸収トルク特性ライン53よりゆるやかな勾配をもつものとなる。その結果として、エンジン13の回転速度が一気に非常に高い値にまで上昇し、これに対し、HSTポンプ23の吸収トルクはゆるやかに上昇することになる。したがって、発進時の実際の燃費は、車両の設計に期待された燃費よりも悪くなる。つまり、いわゆる、エンジンの噴き上がりが発生してしまい、燃料が無駄に消費されてしまう。これが、前述した従来技術の1番目の問題である。
【0041】
従来技術の2番目の問題は次のとおりである。比較のため、HST21ではなくてトルクコンバータを有するパワートレイン10を備えたフォークリフトにおいて、発進時に上述したような急激で大きなアクセル操作が行われた場合における、トルクコンバータの吸収トルクの上昇特性ラインを、図3中のもう一つの二点鎖線の特性ライン61で示す。トルク上昇特性ライン61に示されたトルクコンバータの吸収トルクの上昇は、特性ライン59に示されたHSTポンプ23よりも、更に緩やかな勾配をもつものとなる。しかしながら、フォークリフトの発進時には、このトルク上昇特性ライン61に示されるようなゆるやかな吸収トルク上昇の方が、むしろ適当な大きさの加速度を発生させることになる。その理由は、トルク特性ライン61に示されるようなゆるやかなトルク上昇が、フォーク上に支持されている荷物に余計な衝撃が加わる、荷崩れが生じるなどの事故を防ぐことになるからである。したがって、トルク上昇特性ライン59に示されるHSTポンプ23の吸収トルクの上昇特性では、HSTを有するフォークリフトは、トルクコンバータを有するフォークリフトに比べて、その発進時に過度な加速が生じてしまうおそれがある。
【0042】
以上の説明により、従来技術における2つの問題の発生メカニズムを説明した。なお、上述した2つの問題は、発進時だけでなく、低速走行状態から加速するときにも発生することは明らかであろう。
【0043】
次に、本発明の一実施形態に係る車両について説明する。
【0044】
本実施形態の車両(典型的にはフォークリフト)も、図2に示された構成をもつパワートレイン10を備える。ただし、本実施形態では、図2に示されたエンジンコントローラ11及びHSTコントローラ15は、図2を参照しつつ既に説明した従来の制御動作とは異なる制御動作を行う。本実施形態における制御動作は、エンジンコントローラ11及びHSTコントローラ15にそれぞれ組み込まれたコンピュータが、そこに記憶されているコンピュータ・プログラムを実行することによって実現することもできるし、あるいは、エンジンコントローラ11及びHSTコントローラ15に組み込まれたワイヤード・ロジック回路によって実現することもできるし、あるいは、コンピュータ・プログラムの実行とワイヤード・ロジック回路との組み合わせによって実現することもできる。
【0045】
図4は、本実施形態に係る車両が備えるパワートレイン10の構成例を示している。
【0046】
エンジンコントローラ11及びHSTコントローラ15は、それぞれ、後述する制御動作を行うようプログラムされたCPU、メモリ及びその他の付属回路等から構成される。図4に示すように、エンジンコントローラ11は、エンジン制御部11aを有する。エンジンコントローラ11のエンジン制御部11aには、回転速度センサ14により検出されたエンジン回転速度14aとアクセル制御部15aから出力される制御用アクセル操作量11bとが入力される。そして、エンジン制御部11a(特にそのASG)は、アクセル操作制御部15aからの制御用アクセル操作量11bが大きいほど、同じ出力トルクが出力されるエンジン回転速度が上昇するように(換言すれば、制御用アクセル操作量11bが大きいほど、図3中でエンジン出力トルク特性ライン55が右へシフトするように、より簡単に述べれば、制御用アクセル操作量11bが増えればエンジン回転速度が上昇するように)、制御用アクセル操作量11bおよびエンジン回転速度14aに応じてエンジン13の燃料噴射量を制御する。
【0047】
ここで、上記の制御用アクセル操作量11bについて、簡単に説明する。運転者がフォークリフトを発進または加速させるためにアクセルペダル5を急激に踏み込んだ場合、実際のアクセル操作量5aはアクセルペダル5の急激な踏み込みに即応して非常に高い時間当たり増加率で増加するのに対し、HSTコントローラ15で生成される制御用アクセル操作量11bは、予め設定された制限された時間当たり増加率で増加する。したがって、この場合には、制御用アクセル操作量11bは実際のアクセル操作量5aよりゆっくりと増加する。この制御用アクセル操作量11bに基づいて、エンジン制御部11aがエンジン13を制御することになる。
【0048】
また、HSTコントローラ15は、アクセル操作制御部15aとポンプ制御部15bとを有する。HSTコントローラ15のアクセル操作制御部15aには、アクセルペダル5で検出された実際のアクセル操作量5aが入力される。(ここで、本実施形態では、実際のアクセル操作量5aはエンジンコントローラ11に入力されて、そこからHSTコントローラ15に通知されるが、これは単なる例示にすぎず、実際のアクセル操作量5aが直接的にHSTコントローラ15に入力されてもよい。)アクセル操作制御部15aは、実際のアクセル操作量5aに基づいて、制御用アクセル操作量11bを生成する。その生成方法は後に説明する。
【0049】
HSTコントローラ15のポンプ制御部15bには、回転速度センサ14で検出されたエンジン回転速度14と、前後進切替レバー7で選択された前進、ニュートラル又は後進の指令が入力される。(ここで、本実施形態では、エンジン回転速度14aはエンジンコントローラ11に入力されて、そこからHSTコントローラ15に通知されるが、これは単なる例示にすぎず、エンジン回転速度14aが直接的にHSTコントローラ15に入力されてもよい。)ポンプ制御部15bは、図3に示した最大吸収トルク特性ライン53に従って、エンジン回転速度14aが高いほどHSTポンプ23の最大吸収トルクが高くなるように、エンジン回転速度14aに応じてHSTポンプ23の最大吸収トルクを決定し、その最大吸収トルク指令をHSTポンプ用EPCバルブ17,18に出力する。その最大吸収トルク指令に基づいてHSTポンプ23の容量が制御される。
【0050】
ところで、図4に示されたエンジンコントローラ11とHSTコントローラ15の構成は、説明のための一例にすぎず、それとは異なる構成が採用されてもよい。例えば、上述したアクセル操作制御部15aが、HSTコントローラ15ではなく、エンジンコントローラ11内に存在してもよいし、或いは、アクセル操作制御部15aの一部分がHSTコントローラ15内に存在し、他の部分がエンジンコントローラ11内に存在してもよい。あるいは、エンジンコントローラ11とHSTコントローラ15が単一のコントローラとして構成されてもよい。しかし、以下の説明は、図4に示された構成に基づいて行う。
【0051】
次に、上述したHSTコントローラ15のアクセル操作制御部15aについて、より詳細に説明する。
【0052】
HSTコントローラ15のアクセル操作制御部15aは、実際のアクセル操作量5aに基づいて、制御用アクセル操作量11bを生成する。制御用アクセル操作量11bは、以下に示す時間区間では、実際のアクセル操作量5aより小さく、それ以外のときには、実際のアクセル操作量5aと等しい。この時間区間(つまり、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなる時間区間)は、制御用アクセル操作量11bが実際のアクセル操作量5aと今まで等しかったところで、実際のアクセル操作量が、予め設定された制限値より高い時間当たり増加率で増加を開始した時点で開始される。実際のアクセル操作量5aは上記制限値より高い時間当たり増加率で増加するのに対し、制御用アクセル操作量11bは上記制限値に相当する時間当たり増加率で(実際のアクセル操作量5aよりもゆるやかに)増加する。そのため、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなる。その後、制御用アクセル操作量11bが増加していって実際のアクセル操作量5aに到達した時点で、制御用アクセル操作量11bの増加が停止し、この時間区間が終わる。制御用アクセル操作量11bが実際のアクセル操作量5aに一旦等しくなると、以後は、実際のアクセル操作量5aが再び上記制限値より高い時間当たり増加率で増加しない限り(換言すれば、実際のアクセル操作量5aが一定であっても、低下しても、上記制限値以下の時間当たり増加率で増加しても)、制御用アクセル操作量11bは実際のアクセル操作量5aと等しい値になる。
【0053】
要するに、制御用アクセル操作量11bは、実際のアクセル操作量5aの時間当たり増加率を、所定の制限値に制限することで得られる値である、ということができる。発進または加速のために瞬時に実際のアクセル操作量5aが急増した場合、エンジン制御部11aへ与えられる制御用アクセル操作量11bは、それよりゆるやかに増加する。したがって、この場合、HSTポンプ23の吸収トルクは、制御用アクセル操作量11bのゆるやかにした増加に良好に追従して、図3に示された最大吸収トルク特性ライン53にほぼ沿って上昇する。結果として、エンジン13は燃費の比較的に良い領域(図3中の比較的に低速のエンジン回転速度で高い出力トルクの領域)で動作することができる。また、フォークリフトを急発進又は急加速させるとき、エンジン回転速度が高くはならないので、過度な加速の問題も改善される。
【0054】
図5は、実際のアクセル操作量5aが上記制限値より高い時間当たり増加率で増加したときの制御用アクセル操作量11bの増加の様子を例示している。
【0055】
例えば、実際のアクセル操作量5aと制御用アクセル操作量11bがともに0%である状態から、実際のアクセル操作量5aが特性ライン41に示すように、0%から100%まで一気に高い時間当たり増加率で増加した場合を想定する。これは、例えば、運転者がアクセルペダルを0%から最大限100%まで一気に踏み込んだ場合である。この場合、制御用アクセル操作量11bは、特性ライン43に示すように、予め設定された制限値に相当する時間当たり増加率(図示の例では、100ミリ秒のような単位時間当たりの増加ステップ43a)で、実際のアクセル操作量5aよりもゆるやかに増加していき、そして、実際のアクセル操作量5a(例えば100%)に到達すると、増加を停止する。
【0056】
次に、実際のアクセル操作量5aが特性ライン45に示すように、0%から40%の間で、一気に高い時間当たり増加率で増加した場合を想定する。これは、例えば、運転者がアクセルペダルを0%から40%まで一気に踏み込んだ場合である。この場合、制御用アクセル操作量11bは、特性ライン47に示すように、予め設定された制限値に相当する時間当たり増加率(図示の例では単位時間当たりの増加ステップ47aで、実際のアクセル操作量5aよりもゆるやかに増加していき、その後、実際のアクセル操作量5a(例えば40%)に到達すると、増加を停止する。
【0057】
ここで、上記制限値は、現在の実際のアクセル操作量5aの大小に関わらず一定値に設定されてもよいし、あるいは、図5に示された例のように、現在の実際のアクセル操作量5aに応じて可変に設定されてもよい。
【0058】
そこで、図6を参照して、現在の実際のアクセル操作量5aに応じて上記制限値を可変に設定する場合の設定例を説明する。
【0059】
図6に特性ライン(制限値特性ライン)49で例示するように、現在の実際のアクセル操作量5aが大きくなるほど、制限値(つまり、アクセル操作量の時間当たり増加率)も大きくなるように、現在の実際のアクセル操作量5aに応じて、制限値が設定される。例えば、現在の実際のアクセル操作量5aが100%の場合の制限値は0.7%/単位時間であり、現在の実際のアクセル操作量5aが40%の場合の制限値は0.46%/単位時間である、というようにである。一般に、運転者は、アクセルペダルを大きく踏み込むほど、すばやく、制御用アクセル操作量11bが増加して、フォークリフトが発進又は加速することを望む。それゆえに、図6に示されるように、実際のアクセル操作量5aが大きいほど、制限値(つまり、アクセル操作量の時間当たり増加率)が大きな値になるように、制限値特性ライン49が設定されている。
【0060】
図6に示されたような制限値特性ライン49は、HSTコントローラ15のアクセル操作制御部15aに、例えば、制限値を決定するためのファンクションまたはルックアップテーブルとして、実装することができる。
【0061】
ここで、図6に示された制限値特性ライン49によれば、上記制限値は実際のアクセル操作量に対してリニアに増加するが、必ずしもそうである必要はなく、ノンリニアに増加してもよい。いずれにしても、この制限値は、その制限値に相当する時間当たり増加率で制御用アクセル操作量11bが増加したことによって引き起こされるエンジン回転速度の増加に、HSTポンプ23の動作(特に容量の増加)が十分に追従するような、低い時間当たり増加率の範囲内で設定される。
【0062】
図6に示された制限値を用いた場合、実際のアクセル操作量が図5に示された例のように、一気に高速に或る値まで増えた場合(いわゆる、アクセルペダルの「一気踏み」の場合)には、制御用アクセル操作量は、前記或る値に対応する一定の時間当たり増加率で増加していくことになる。他方、実際のアクセル操作量が時間をかけて増える場合(いわゆる、アクセルペダルの「踏み増し」の場合)には、制御用アクセル操作量は、逐次に上昇していく時間当たり増加率で増加していくことになる。
【0063】
図7は、時間経過に伴う実際のアクセル操作量5aの変化の一例と、それに応じた制御用アクセル操作量11bの変化の一例を示している。
【0064】
例えば、実際のアクセル操作量5aが、時刻t0から、HSTポンプ23の動作が遅れずに追従することができないような高い(つまり、予め設定された制限値より高い)時間当たり増加率で増加したとする(例えば、アクセルペダル5を最大量踏み込んだ発進あるいは加速が行われた場合)。すると、制御用アクセル操作量11bが、上に述べた制限値に相当する時間当たり増加率で増加する。その時間当たり増加率(つまり制限値)は、前述したように、HSTポンプ23の動作が遅れずに追従できる低い値である。したがって、制御用アクセル操作量11bは、実際のアクセル操作量5aよりもゆるやかに増加する。
【0065】
その後、例えば時刻t1で、制御用アクセル操作量11bが現在の実際のアクセル操作量5aに到達すると、制御用アクセル操作量11bの増加が止まる。
【0066】
その後、実際のアクセル操作量5aが再び制限値より高い時間当たり増加率で増加しなければ、すなわち、例えば、実際のアクセル操作量5aが一定(例えば、時間区間t1〜t2、t3〜t4)であるか、減少(例えば、時間区間t2〜t3)するか、あるいは制限値以下の時間当たり増加率で増加するならば、制御用アクセル操作量11bは実際のアクセル操作量5aと等しい値になる。
【0067】
さらに、例えば時刻t4において、HSTポンプ23が遅れずに追従することができない高い時間当たり増加率で実際のアクセル操作量5aが再び増加したとすると、制御用アクセル操作量11bは再び制限値に相当する(つまり、HSTポンプ23の動作が遅れなしに追従できるように低い)時間当たり増加率で現在の実際のアクセル操作量5aに向かって増加する。
【0068】
このように、実際のアクセル操作量5aが、HSTポンプ23の動作が遅れずに追従することができないような高い時間当たり増加率で増加したときには、必ず、制御用アクセル操作量11bは、HSTポンプ23の動作が遅れずに追従できる低い時間当たり増加率で増加する。
【0069】
上記のような制御用アクセル操作量11bを生成するために、HSTコントローラ15のアクセル操作制御部15aは、例えば図8に示すような処理を行うことができる。
【0070】
すなわち、アクセル操作制御部15aには、ステップS1で、現在の実際のアクセル操作量5aが入力され、ステップS2で、現在の実際のアクセル操作量5aに基づいて、図6に例示されたような制限値特性ライン49に従い、制御用アクセル操作量の制限値(つまり、制限された時間当たり増加率)を決定する。アクセル操作制御部15aは、ステップS3で、制御用アクセル操作量11bにステップS2で得た制限値を加算した値と、実際のアクセル操作量5aとを比較し、その結果、上記加算値が現在の実際のアクセル操作量5aより小さければ(ステップS3でYES)、ステップS4で、その加算値を新たな制御用アクセル操作量とする。これは、制御用アクセル操作量11bを、ステップ2で決定された制限値に相当する時間当たり増加率で、実際のアクセル操作量5aに向かって増加させることを意味する。また、ステップS3の結果、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなければ(つまり、等しいか、大きければ)(ステップS3でNO)、アクセル操作制御部15aは、ステップS5で、現在の実際のアクセル操作量5aを新たな制御用アクセル操作量11bとする。これは、制御用アクセル操作量11bを現在の実際のアクセル操作量5aに一致させることを意味する。そして、アクセル操作制御部15aは、ステップS6で、上記のようにして決定された新たなアクセル操作量5aを、エンジンコントローラ11へ出力する。
【0071】
以上の処理の結果、制御用アクセル操作量11bが実際のアクセル操作量5aと等しい状態から、実際のアクセル操作量5aが減少するか又は制限値以下の時間当たり増加率で増加した場合には、制御用アクセル操作量11bは実際のアクセル操作量5aとともに変化してそれと等しい状態を維持する。例えば、実際のアクセル操作量5aが制限値より高い時間当たり増加率で増加した場合には、制御用アクセル操作量11bは、上記制限値に相当する時間当たり増加率(つまり、実際のアクセル操作量5aよりもゆっくりと)で増加する。
【0072】
変形例として、アクセル操作制御部15aは、上記図8に示された処理に変えて、図9に示すような処理を行うこともできる。
【0073】
すなわち、アクセル操作制御部15aには、ステップS11で、現在の実際のアクセル操作量5aが入力され、ステップS12で、現在の実際のアクセル操作量5aに基づいて、図6に例示されたような制限値特性ライン49に従い、制御用アクセル操作量の制限値(つまり、制限された時間当たり増加率)を決定する。アクセル操作制御部15aは、ステップS13で、制御用アクセル操作量11bと実際のアクセル操作量5aとを比較し、その結果、現在の制御用アクセル操作量11bが現在の実際のアクセル操作量5aより小さければ、ステップS14で、現在の制御用アクセル操作量に、ステップS12で決定された時間当たり増加率(上記制限値)を加算して、その加算値を新たな制御用アクセル操作量とする。これは、制御用アクセル操作量11bを、ステップ12で決定された制限値(制限された時間当たり増加率)で増加させることを意味する。また、ステップS13の結果、制御用アクセル操作量11bが実際のアクセル操作量5aより小さくなければ(つまり、等しいか、大きければ)、アクセル操作制御部15aは、ステップS15で、現在の実際のアクセル操作量5aを新たな制御用アクセル操作量11bとする。これは、制御用アクセル操作量11bを現在の実際のアクセル操作量5aに一致させることを意味する。そして、アクセル操作制御部15aは、ステップS16で、上記のようにして決定された新たなアクセル操作量5aを、エンジンコントローラ11へ出力する。
【0074】
再び、図4を参照する。エンジンコントローラ11のエンジン制御部11aは、制御用アクセル操作量11bに応じて、図3に示された最大吸収トルク特性ライン53に沿うように、HSTポンプ23の最大吸収トルクを制御する。したがって、発進または加速のために実際のアクセル操作量5aが急増した場合、制御用アクセル操作量11bは、HSTポンプ23が追従動作できるような低い時間当たり増加率で増加する。よって、この場合、HSTポンプ23の実際の吸収トルクは、制御用アクセル操作量11bのゆるやかな増加に良好に追従して、図3に示された最大吸収トルク特性ライン53にほぼ沿って上昇する。結果として、エンジン13のいわゆる吹き上がりがなく、エンジン13は燃費の比較的に良い領域(図3中の比較的に低速のエンジン回転速度で高いエンジン出力トルクの領域)で動作することができる。また、エンジン回転速度もあまり高い値までは上昇しないので、発進時の過度な加速の問題も改善される。
【0075】
特にフォークリフトでは、本実施形態にかかるパワートレイン10が適用された場合に前述した2つの問題点が解消される効果は明確である。本実施形態にかかるパワートレイン10を搭載したフォークリフトは、そのようなアクセルぺダル操作が発進時に行われても、発進時の飛び出し感(過度の加速感)が少なく、かつ、低燃費効果を得ることができる。
【0076】
以上、本発明の好適な実施形態を説明したが、これは本発明の説明のための例示であり、本発明の範囲をこの実施形態にのみ限定する趣旨ではない。本発明は、その要旨を逸脱しない範囲で、上記実施形態とは異なる種々の態様で実施することができる。例えば、上記実施形態のエンジンコントローラ11とHSTコントローラ15がもつ複数の機能は、単一のコントローラで集中的に行われてもよいし、あるいは、より多くのコントローラによって分散して行われてもよい。また、上記実施形態のエンジンコントローラ11の一部の機能が、HSTコントローラ15に移されてもよいし、あるいは、上記実施形態のHSTコントローラ15の一部の機能が、エンジンコントローラ11に移されてもよい。また、フォークリフトに限らず、ホイールローダやクレーン車等の荷役車両において、本発明を適用することにより、同様な課題を解決することができる。さらに、エンジンからの動力を油圧ポンプと油圧モータを介して駆動輪に使えるように構成された車両だけでなく、エンジンからの動力を油圧ポンプと油圧モータを介して何らかの回転駆動を必要とする装置へ伝達するように構成された産業機械にも、本発明は適用可能である。
【符号の説明】
【0077】
1 フォークリフト
3 駆動輪
5 アクセルペダル
5a 実際のアクセル操作量
7 前後進切替レバー
9 出力軸
10 車両
11 エンジンコントローラ
11a エンジン制御部
11b 制御用アクセル操作量
13 エンジン
14 回転速度センサ
15 HSTコントローラ
15a アクセル操作制御部
15b ポンプ制御部
17、18 HSTポンプ用EPCバルブ
20 ポンプ容量可変ユニット
21 HST
23 HSTポンプ
25 HSTモータ
31 駆動輪システム
【特許請求の範囲】
【請求項1】
エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置とを有する車両において、
実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御手段と、
前記アクセル操作制御手段からの前記制御用アクセル操作量に応じて、前記エンジンを制御するエンジン制御手段と
を備える車両。
【請求項2】
請求項1記載の車両において、前記アクセル操作制御手段は、前記実際のアクセル操作量と、前記制御用アクセル操作量に前記制限値を加算した値とを比較し、小さい方の値を新たな前記制御用アクセル操作量として出力するように構成された、車両。
【請求項3】
請求項1記載の車両において、前記アクセル操作制御手段は、
前記実際のアクセル操作量と、前記制御用アクセル操作量とを比較し、前者が後者より大きければ、前記制御用アクセル操作量に前記制限値を加算した値を新たな前記制御用アクセル操作量として出力し、そうでなければ、前者を新たな前記制御用アクセル操作量として出力するように構成された、車両。
【請求項4】
請求項1~3のいずれか一項記載の車両において、
前記制限値は、前記制限値に相当する時間当たり増加率で前記制御用アクセル操作量が増加したことによって引き起こされる前記エンジン回転速度の増加に対して、前記油圧ポンプの容量の増加が追従できる範囲内に設定されている、車両。
【請求項5】
請求項1〜4記載のいずれか一項記載の車両において、
前記制限値は、現在の前記実際のアクセル操作量に応じて、現在の前記実際のアクセル操作量が大きいほど前記制限値が大きくなるように設定される、車両。
【請求項6】
請求項1〜5のいずれか一項記載の車両において、フォークリフトとして構成された車両。
【請求項7】
エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置とを有する車両のための制御方法において、
実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御ステップと、
前記アクセル操作制御ステップからの前記制御用アクセル操作量に応じて、前記エンジンを制御するエンジン制御ステップと
を備える制御方法。
【請求項8】
エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置とを有する車両のための制御装置において、
実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御手段と、
前記アクセル操作制御手段からの前記制御用アクセル操作量に応じて、前記エンジンを制御するエンジン制御手段と
を備える制御装置。
【請求項1】
エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置とを有する車両において、
実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御手段と、
前記アクセル操作制御手段からの前記制御用アクセル操作量に応じて、前記エンジンを制御するエンジン制御手段と
を備える車両。
【請求項2】
請求項1記載の車両において、前記アクセル操作制御手段は、前記実際のアクセル操作量と、前記制御用アクセル操作量に前記制限値を加算した値とを比較し、小さい方の値を新たな前記制御用アクセル操作量として出力するように構成された、車両。
【請求項3】
請求項1記載の車両において、前記アクセル操作制御手段は、
前記実際のアクセル操作量と、前記制御用アクセル操作量とを比較し、前者が後者より大きければ、前記制御用アクセル操作量に前記制限値を加算した値を新たな前記制御用アクセル操作量として出力し、そうでなければ、前者を新たな前記制御用アクセル操作量として出力するように構成された、車両。
【請求項4】
請求項1~3のいずれか一項記載の車両において、
前記制限値は、前記制限値に相当する時間当たり増加率で前記制御用アクセル操作量が増加したことによって引き起こされる前記エンジン回転速度の増加に対して、前記油圧ポンプの容量の増加が追従できる範囲内に設定されている、車両。
【請求項5】
請求項1〜4記載のいずれか一項記載の車両において、
前記制限値は、現在の前記実際のアクセル操作量に応じて、現在の前記実際のアクセル操作量が大きいほど前記制限値が大きくなるように設定される、車両。
【請求項6】
請求項1〜5のいずれか一項記載の車両において、フォークリフトとして構成された車両。
【請求項7】
エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置とを有する車両のための制御方法において、
実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御ステップと、
前記アクセル操作制御ステップからの前記制御用アクセル操作量に応じて、前記エンジンを制御するエンジン制御ステップと
を備える制御方法。
【請求項8】
エンジンと、前記エンジンにより駆動される可変容量型の油圧ポンプと、前記油圧ポンプにより駆動される油圧モータと、その油圧モータにより駆動される負荷装置とを有する車両のための制御装置において、
実際のアクセル操作量を入力し、前記実際のアクセル操作量の時間当たり増加率を予め設定された制限値に制限することにより、制御用アクセル操作量を生成するアクセル操作制御手段と、
前記アクセル操作制御手段からの前記制御用アクセル操作量に応じて、前記エンジンを制御するエンジン制御手段と
を備える制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−57502(P2012−57502A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−199400(P2010−199400)
【出願日】平成22年9月6日(2010.9.6)
【出願人】(000001236)株式会社小松製作所 (1,686)
【出願人】(000184643)コマツユーティリティ株式会社 (106)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月6日(2010.9.6)
【出願人】(000001236)株式会社小松製作所 (1,686)
【出願人】(000184643)コマツユーティリティ株式会社 (106)
【Fターム(参考)】
[ Back to top ]