
治療の精度を確保するシステム
【課題】陽子線によるがん性腫瘍の治療のための、患者の治療の精度を確保するシステムを提供する。
【解決手段】患者2、ストラップ固定機構、または担持装置3に取り付けられ、患者固定座標系を規定する1つまたは複数のターゲット群11と、1つまたは複数のターゲット群11と撮像システムの局所参照マーカーとを観測して患者固定座標系と撮像システムの座標系との関係を決定することにより、患者2内部の治療すべき位置1を患者固定座標系において計算できるようにする第1の電気光学測定システムと、1つまたは複数のターゲット群11と治療システム8の局所参照マーカー9とを観測することにより、患者2内部の治療すべき位置1を治療システム8の座標系9aにおいて計算できるようにする第2の電気光学測定システムとを備える構成とする。
【解決手段】患者2、ストラップ固定機構、または担持装置3に取り付けられ、患者固定座標系を規定する1つまたは複数のターゲット群11と、1つまたは複数のターゲット群11と撮像システムの局所参照マーカーとを観測して患者固定座標系と撮像システムの座標系との関係を決定することにより、患者2内部の治療すべき位置1を患者固定座標系において計算できるようにする第1の電気光学測定システムと、1つまたは複数のターゲット群11と治療システム8の局所参照マーカー9とを観測することにより、患者2内部の治療すべき位置1を治療システム8の座標系9aにおいて計算できるようにする第2の電気光学測定システムとを備える構成とする。
【発明の詳細な説明】
【背景技術】
【0001】
使用分野−背景
現代の医療技術の進歩によって、従来可能であった水準よりも高い幾何学的精度と局所的な効果の可能性を有し、周囲の臓器や組織の損傷を回避する、新しい治療が可能になる。
【0002】
例えば、現在は、がん性腫瘍の放射線照射の際に、より広い範囲を照射するゆえに健康な臓器や組織を大量に損傷する恐れのある旧来の治療法よりも、精度良く行うことが可能である。特に若年患者の場合は、そうした進歩により、放射線治療の結果として後年にがんを発症する可能性が劇的に低下するが、高齢患者の場合もまた、向上した精度のおかげで、周囲の健康な臓器や組織を損傷するリスクの増加なしにより高い放射線量をがん性細胞に照射できるようになる。
【0003】
具体的な例として、陽子線がん治療が、その特有の陽子線吸収特性により、次第に古い放射線治療に取って代わってきている。
【0004】
古い放射線法では有害光線が患者の体に送られ、それにより腫瘍自体だけでなく入出経路全体にわたって損傷が生じてしまう。従って、周囲の臓器や組織での体積当たりの放射線量をできるだけ低く抑えるために、腫瘍を広範囲の角度から照射して、入出経路の放射を多くの臓器や組織に分散させる。このように、意図的な腫瘍の放射線照射と、その結果起こる、非常に危険となりかねない健康な臓器や組織の放射線照射との間には強い関係があるので、腫瘍に対して与えることのできる放射線量が制約され、患者は健康な臓器や組織に損傷を受ける重大なリスクにさらされる。治療中および治療直後の不快が増し、治療の結果として後年にがんを発症する可能性が増加するのである。
【0005】
陽子線は、陽子線を放射線治療システムに非常に適したものにする2つの重要な性質を有することが分かっている。第1に、陽子線は、大きな粒子質量のため散乱が少ないので、より正確に臓器や組織の間に照準を合わせることができる。第2に、陽子線は、いくぶん高めにエネルギーを加えて体内への貫通深さを制御することができ、しかもそのエネルギーの大部分が貫通部の最後の数ミリメートル内に付与される(いわゆるブラッグピーク)。従って、従来の放射線治療の場合よりも厳密に定義された領域に放射線量の狙いを定めることができ、進入経路に沿った損傷が最小化され、標的腫瘍より深い部分の損傷は事実上なくなる。これにより、より効率的な治療のためにより高い放射線量を腫瘍に当てると同時に周囲の健康な臓器や組織への放射線量を大幅に減らし、その結果、後年にがんを発症する可能性をより低くすることが可能である。
【0006】
陽子線治療システムは極めて高価であり、現在、典型的には製造に1億ドルから3億ドルの費用がかかる。従って、この費用を正当化するには、そうしたシステムから受ける利益が最大化されるようにすることが必要である。
【0007】
このような新技術を最大限に活用するためには、治療の幾何学的精度を劇的に向上させることが必要である。例えば、患者内部の腫瘍の大きさと位置を正確に決定し、この情報を、放射線照射が腫瘍位置に正確に施されるようにするため、精度を失わずに撮像システムから放射線治療機器へと転送して活用することが必要である。放射線量が高められ、吸収深さが明確に定められた場合、放射ビームの位置と向きを腫瘍に対して正しく合わせることが明らかに重要である。業界では、全3軸において0.1mmの機器精度という目標が言われている。
【0008】
もちろん、精度が高まることは、古い治療法においても有益である。これは、より良い精度により、放射線等の治療技術自体に固有の限界を前提として、可能な限り最高の治療精度を実現できるからである。
【発明の概要】
【発明が解決しようとする課題】
【0009】
現状技術
例えば腫瘍のような、治療を要する領域の大きさと位置を決定するために、さまざまな撮像技術が用いられる。そうした技術としては、X線、磁気共鳴撮像(MRI)、またはコンピュータ断層撮影(CT)走査などがある。これらのシステムは、治療を要する領域の大きさ、形状、および位置についての情報を、局所的な撮像システム固有の座標系を基準として提供する。
【0010】
多くの撮像システムは、放射線にさらされると損傷を受けやすく、従って放射線システムから離して設置されなければならない。
【0011】
治療の際、治療システムは、腫瘍が最大限の放射線量を受けつつ周囲の臓器や組織の損傷が最小限となるように、治療器具−例えば放射線源−に対して正しい位置に患者を置かなければならない。損傷をさらに低減し、腫瘍の形状を構成するために、多くの場合、放射線照射はさまざまな方向から複数回に分けて行われる。このため、放射線機器に対する腫瘍の位置決めは繰り返し作業になる。
【0012】
患者の幾何学的形状の安定化は通常、さまざまなストラップ固定システム、ギプス、型、固定システム、またはねじさえ用いることにより患者−または患者の体の適切な部分−を機械的な担持装置に機械的に接続することによって行われる。
【0013】
現在、すべての撮像器具および治療器具は、たとえ施設内の遠く離れた部分に設置される場合であっても、しばしば「ISO系」(ISO system)と呼ばれる、共通のマスター座標系に据え付けられる。この共通マスター座標系は、しばしば基準(fiducial)と呼ばれる、施設じゅうに置かれた物理的マーカーによって表される。共通マスター座標系に関するネットワーク全体のマーカーの相対位置は、セオドライトまたはレーザートラッカーのような精密技術を用いて測定される。
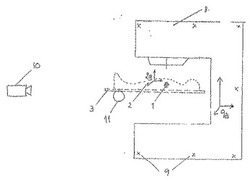
【0014】
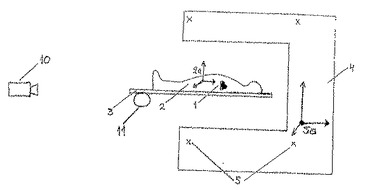
これを模式図1に示す。同図において、担持装置3上の患者2内部の腫瘍1の位置は、参照マーカー6のネットワークによって表される共通マスター座標系6aに関して正確に既知である局所参照マーカー5を有する撮像システム4によって決定される。
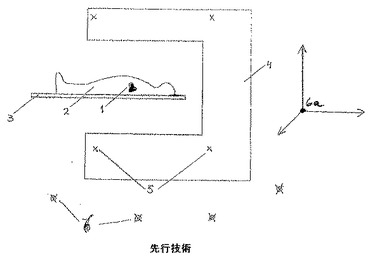
【0015】
模式図2に示すように、治療システム8もまた、参照マーカー6のネットワークによって表される共通マスター座標系6aと正確に連携した局所参照マーカー9を有する。従って、実際上の理由から、参照マーカーのネットワークは、全てのマーカーを共通マスター座標系6aに関して正確に決定できるようにするために、施設じゅうに広がっていなければならない。
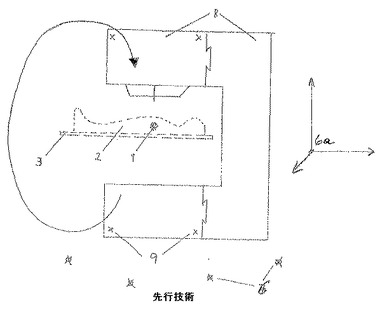
【0016】
模式図3は、施設の一部分の例を示す図であり、具体的には、共通マスター座標系6aを確立するために参照マーカー6のネットワークが撮像システム4の位置から治療システム8の位置までどのように広がっているか、を示している。
【0017】
参照マーカーのネットワークを確立するのが、特に大きな施設のさまざまな部屋どうしの間で見通しがきかない場合に、時間のかかる難しい作業であることは、よく知られた問題である。また、典型的には、廊下のような特に関心の無い領域にもマーカーが必要となるが、これは単に、測定器具が実際に関心のあるさまざまな領域を束ねられるようにするために、マーカーが必要とされるためである。これに、建物に名ばかりの安定性しかないという困難さが加わる。非常に重い鋼コンクリート製の建物でさえ、日常の熱負荷および機械的負荷に応じて、言われている0.1mmという目標の何倍も容易に変形してしまうのである。
【0018】
説明のために陽子線治療の例に戻ると、陽子銃/陽子ノズル組立品は、典型的に、重量が何トンもあるどっしりとした構造物である。多くの場合、図2に示すように銃/ノズルは患者の回りに回転可能であり、回転構造の数ミリメートルの変形はよく起こることで、典型的には頻繁な間隔で補償しなければならない。
【0019】
共通マスター座標系の目的は、撮像システムで取得された位置データを、例えば放射線システムのような治療システムへ転送して使用できるようにすることである。従って、ネットワークを確立する際に生じる測定誤差、またはネットワーク自体の不安定性、またはどちらのシステムであれ据え付ける際に生じる取り付け位置不良が、撮像システムと放射線システムとの間で幾何情報を転送する際の精度に影響することになる。明らかに、現在の方式は、大規模な施設じゅうで経時的に0.1mmの精度を保つという要求に応えるには適していない。
【0020】
共通マスター座標系内ですべてのユニットを機械的に位置合わせする必要に加えて、現在の技術水準の下では、各ユニットの局所座標系内での位置ずれを正確に予測することも必要である。例えば、患者担持装置は共通マスター座標系内で操られるので、その据え付け時の正確な位置と向きを知ることが必要なだけでなく、その移動範囲全体にわたる誤差も分かっていなければならない。本質的にはロボットなので、担持装置システムは正確に較正されなければならず、その較正データは、患者の体重、患者の体重配分、および重力に対する担持装置の角度のような、可変パラメータを考慮する必要のある場合がある。同様に、回転する銃/ノズル組立品の特性についても正確に把握して補償する必要があるが、これは、ユニットの位置または方向のいかなるずれも明らかに望ましくないためであり、回転する銃/ノズル組立品は、その大変な重量のため、その移動の弧を通じて著しい変形を示す場合がある。時間経過などの影響に対して0.1mmの精度要求に応え得る補償値を達成するのは、明らかに極めて困難である。
【0021】
従って、現状技術は、著しい労力と費用を負担しているにもかかわらず、言われている精度要求に応えるには適さないのである。
【課題を解決するための手段】
【0022】
本発明
本発明は、撮像システムと治療システムとの間において重要な幾何学的情報を最小限の誤差の蓄積で取得し転送する新しい手法に関係するものである。本発明は、施設全体にわたる共通マスター座標系の必要を完全になくし、施設の大きさや、さまざまな撮像システムおよび治療システムの個々の配置とは無関係に精度を提供し、しかも安定な施設構造に頼ることがない。本発明は、現在の方式におけるほとんどの誤差の寄与分の影響をなくし、据え付け時にシステムを共通マスター座標系に対して位置合わせする必要をなくし、またいくつかのシステム要素の特性のマッピングと較正の必要もなくす。
【0023】
これらの目的は、本発明に従って、請求項1または2に記載されたシステムにより達成される。このシステムの有利な実施の形態は、従属請求項3ないし15に記載されている。
【0024】
従って、本発明は、参照マーカーのネットワークを確立し維持する費用と複雑さを減らしつつ、より高い治療精度を提供する。
【0025】
本発明は、患者固定座標系を導入する。患者−または患者の体の適切な部分−が典型的には担持装置にストラップで固定されて、撮像および治療の際に安定が確保される。1つまたは複数のターゲット群を患者、ストラップ固定機構、または担持装置−これらが互いに安定な位置にある限りどの実施の形態が用いられるかは重要ではない−に取り付けることによって、患者を基準として既知のあらゆる情報が、1つまたは複数のターゲット群に対しても既知となる。
【0026】
ターゲットが、例えば欧州特許第0700506(B1)号明細書、欧州特許第0880674(B1)号明細書、欧州特許第0829701(B1)号明細書、欧州特許第1015845(B1)号明細書、および欧州特許出願公開第1447644(A1)号明細書に記載されているもののような電気光学測定システムによる観測に適する場合、電気光学システムは、それ自体の座標系に関して1つまたは複数のターゲット群の位置を容易に、かつ非常に高い精度で決定することができる。撮像システムもまた、局所参照マーカー−現在は撮像システムを「ISO中心」または共通マスター座標系に位置合わせするために用いられている−を有するので、電気光学測定システムは、それ自体の座標系においてこれらの局所参照マーカーの位置を決定することもできる。局所参照マーカーが電気光学測定システムによる直接観測に適さない場合は、例えば、欧州特許第0607303(B1)号明細書に記載されたもののようなプローブ装置を用いてよい。
【0027】
そして、電気光学測定システムが、患者、ストラップ固定機構、または担持装置に取り付けられた1つまたは複数のターゲット群と撮像システムの局所参照マーカーとの両方を観測すれば、1つまたは複数のターゲット群、すなわち患者固定座標系と、撮像システムの座標系との関係を決定することができる。
【0028】
撮像システムは、患者内部の治療すべき位置を、撮像システムの内部座標系に関して決定する。患者内部の治療すべき位置はこの撮像システムの内部座標系で報告されることになるが、測定された撮像システムの座標系と患者固定座標系との関係を用いることにより、患者内部の治療すべき位置を患者固定座標系において計算することが可能になる。
【0029】
今や患者は撮像システムからいくらでも遠くに移動させることができ、患者固定座標系における患者内部の治療すべき位置についての情報は、精度を失うことなく保持されることになる。
【0030】
この原理を模式図4に示す。同図では、担持装置3上の患者2内部の腫瘍1が、局所参照マーカー5により表される局所座標系5aを有する撮像システム4によって決定される。局所参照マーカー5が撮像システムそのものだけと関係していることに注意されたい。局所参照マーカー5は、他のユニットまたはシステムに関して既知である必要はない。これにより、撮像システムの据え付けおよび取り替えが著しく単純化される。電気光学測定システムは、患者2または担持装置3に関して既知の位置にある1つまたは複数のターゲット群11を観測するセンサ10と、局所参照マーカー5とからなる。従って、局所参照マーカー5に関して取得された腫瘍1の位置についての情報を、患者2または担持装置3、すなわち患者固定座標系に関連付けることが可能である。
【0031】
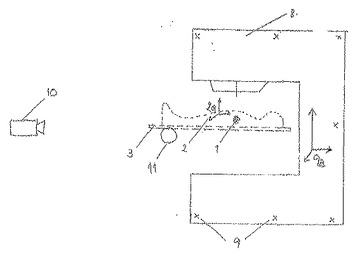
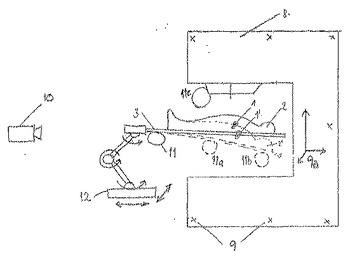
ここで模式図5を見ると、治療システム8もまた、本発明に従って、治療システムに対して既知の位置にあり外部のユニットまたはシステムからは独立した局所参照マーカー9、を有する。電気光学測定システムのセンサ10は、これらの局所参照マーカー9と、患者2または担持装置3に対して既知の位置にあるターゲット群11とを観測する。従って、腫瘍1の位置は、治療システムの局所参照マーカー9ひいては治療システムの局所座標系9aに関して計算することができる。
【発明の効果】
【0032】
本発明の主な効果は以下の通りである。
1−共通マスター座標系の確立と維持に関する費用と労力の解消
2−全システムの各部を較正する必要の著しい低減
3−ネットワークの不正確さ、システム取り付け位置不良、および時間経過や外部からの影響によるネットワークの不安定さに関する、すべての誤差原因の解消
4−患者内部の治療すべき位置についての幾何情報を撮像システムから治療システムへ転送する際の、高められた精度
5−例えば担持装置の較正精度とは無関係に、治療システムに対して患者を誘導するための閉ループフィードバックを提供する能力
【0033】
これにより、本発明は、上記のように治療システムの運用に著しい改善をもたらし、それらの潜在的利益の実現に著しく貢献する。そうしたシステムには極端な費用のかかるものがあることを考えると、本発明はこれらのシステムをより多くの患者が利用できるようにするための重要な貢献である。
【図面の簡単な説明】
【0034】
【図1】従来の撮像システムの模式図
【図2】従来の治療システムの模式図
【図3】従来の施設の一部分の例を示す図
【図4】本発明の実施の形態の撮像システムの模式図
【図5】本発明の実施の形態の治療システムの模式図
【図6】本発明の実施の形態の2D撮像放射線センサの模式図
【図7】本発明の実施の形態の治療システムのロボット機構の模式図
【図8】本発明の実施の形態の治療システムの模式図
【発明を実施するための形態】
【0035】
発明の詳細
撮像システムは、患者内部の治療すべき領域の空間的位置を決定するのに役立つデータを提供できる、あらゆる種類の診断システムであってよい。典型的な例としては、X線、MRI、およびCTの走査システムなどがある。
【0036】
電気光学システムは、典型的には3種類のモジュール、すなわち1つ以上のセンサと、マーカーを捕捉するための1組のターゲットまたはターゲットを備える機構と、ターゲットの空間的位置を抽出するソフトウェアを備えるコンピュータとからなる。
【0037】
ターゲットおよびマーカーは、受動的、能動的、または機械的といった、さまざまな種類のものにすることができる。
【0038】
受動的なターゲットには、例えば十字線、四角形、円などの規則性のある幾何学的形状またはそれらの組み合わせのような、観測に適した2次元の幾何学的図形が含まれる。受動的なターゲットは、紙、プラスチック膜などのような通常の基材上のマークであってもよいし、あるいは光エネルギーの戻りを最大限に活用するために逆反射性であってもよい。そのようなターゲットは、センサと同期した光源によって、または全般的な背景照明によって照明することができる。
【0039】
受動的なターゲットは、センサシステムに応じて、例えば球の中心、立方体などの多面体の角のような、特徴点の空間的決定に適した3次元の物理的形状、または他の正多面体もしくは明確に定義された物体を含むこともできる。
【0040】
能動的なターゲットは、最良の信号対雑音比を確保するために有利な場合がある。能動的なターゲットには、発光ダイオード、レーザー光源、および白熱光源が含まれる。これらは、センサの露光と同期させられてもよいし、実行される観測に基づくセンサに基づいて自動的に調整されたタイミングおよび強度を有してもよいし、一定のサイクル速度を有してもよいし、常時点灯させられてもよい。
【0041】
能動的なターゲットは、例えば表面に受動的なターゲットパターンが刻まれ、印刷され、または他の方法で付けられた背面照光式の半透明ターゲット面を備えた、受動的な要素を含んでよい。また、能動的なターゲットは、能動的な光源が受動的な表面を照らして投影ターゲットを生成する間接的なものとすることもできる。
【0042】
ターゲットは、センサによって直接観測できない機械的な種類とすることもできるし、センサ位置から直接観測できない位置にあってもよい。そのような場合は、例えば欧州特許第607303(B1)号明細書または欧州特許第0880674(B1)号明細書に記載されたように、観測可能なターゲットが埋め込まれたプローブを用いてターゲット位置を取得することができる。
【0043】
ターゲットがセンサまたは複数のセンサから見え、他のシステム要素の動きと干渉せず、要求精度を達成するのに十分なターゲット間隔を与えるようにするため、ターゲット群の形状および大きさは個別の応用に合わせて設計することができる。
【0044】
精度をあまり失わずに担持装置または患者から取り外しおよび再取り付けできるように高精度の取り付け機構を1つまたは複数のターゲット群11に設けると有利な場合がある。いくつかの好適な機構が、例えば航空機への航法装置の取り付け用や従来の座標測定システムへのプローブの取り付け用に市販されている。
【0045】
こうすれば、群取り付け機構が十分な精度を有し、さまざまな種類または形状のターゲット群がすべて取り付け機構に対して同じ座標系を表す限りにおいて、撮像システムまたは治療システムの種類ごとに異なる種類または形状のターゲット群を使用できるようになる。これは、例えば撮像システムが1つまたは複数のターゲット群のある方向の形状を制約し、治療システムが形状または大きさを別の方向において制約し得る場合に実用的であろう。
【0046】
電気光学システムのセンサもまた、いくつかの異なる種類のものにできる。
【0047】
デジタルのスチルカメラまたはビデオカメラで広く用いられているような2Dセンサを備えたカメラが使用できる。代替となるのは、方位角での三角測量のために2つのセンサが垂直に向けられ、ターゲットまでの仰角の決定のために1つが水平になっている、1Dアレイセンサおよび従来光学系または円筒光学系であろう。また、1Dセンサと2Dセンサとの組み合わせを用いることも可能である。
【0048】
もう1つ代替となるのは、自動式のセオドライトを用いることである。これらの器具は、2Dカメラと、正確に既知の方向に、あるいは特定のターゲットを追尾するために画像解析からのフィードバックでカメラを向けるサーボモータとを内蔵する。
【0049】
2Dカメラとレーザー距離計との組み合わせが、カメラだけを用いるのに比べて、動作範囲を増し、カメラの光軸に沿った精度を向上させることは、例えば欧州特許第EP0880674(B1)号明細書でよく知られており、さまざまな器具が市販されている。そのようなシステムは、ターゲット群の位置を1組の基準に対して決定することもできるので、それらも使うことができる。そのようなセンサが選択された場合に好適なターゲット群の例は、例えばライカジオシステムズ(商標)が販売するT−Mac(商標)製品である。
【0050】
さらに別の可能な電気光学センサ構成は、オートメーテッドプレシジョン社(Automated Precision, Inc.)が販売するインテリプローブ360(IntelliProbe 360)(商標)と原理が似たものであろう。この種のセンサは、従来からある球状に取り付けられた逆反射体などのターゲットを追跡するレーザートラッカーを組み合わせる。これは一点を与えるだけであり、従って空間におけるターゲットの向きを決定することができないため、ユニットの向きを取得するために1組の方位センサが加えられる。方位センサは、ジャイロ計器、傾斜センサ、またはホール効果センサを含んでよい。
【0051】
逆の構成が使えることも、例えば欧州特許第1015842(B1)号明細書で知られている。つまり、電気光学センサが患者または担持装置に対して既知の関係(他の方法ではターゲット群が配置される場所)に置かれ、ターゲット群が好適な安定した位置(例えば、他の方法でセンサが配置される場所)に配置されてよい。
【0052】
発明の実際的な実施の形態
図4の局所参照マーカー5および図5の局所参照マーカー9は、撮像システムおよび治療システムの製造業者から提供されない場合がある。
【0053】
そのような場合、それらは、撮像システムについては、例えば撮像システムによって撮像でき光学測定システムによって測定することもできる撮像システムの動作範囲の内側に局所参照マーカーを置いて電気光学測定システムと撮像システムの座標系との関係が決定され得るようにすることにより、作成することができる。あるいは、互いに対して既知の位置に置かれた、撮像システムに好適なマーカーと電気光学測定システム用のマーカーとを組み合わせたさらに複合したマーカーを用いることもできる。どちらの場合も、単一のマーカーを複数の位置に移動させることもできるし、複数のマーカーを両方のシステムによって測定し撮像することもできる。
【0054】
いったん電気光学測定システムと撮像システムの座標系との関係が決定されると、好ましい種類の参照マーカーを撮像システム上または近傍の好適な位置に置くことができ、撮像システムの座標系に関するそれらの位置を電気光学測定システムによって決定することができる。これによって、電気光学システムによる繰り返し使用に好適なマーカーの配置が可能になり、また実際上の理由から、これらのマーカーは、典型的には撮像システムの動作範囲の外側に配置されることになる。
【0055】
あるいは、撮像システム4の座標系5aと電気光学測定システムの位置および向き−センサ10によって表される−との関係を、局所参照マーカー5の代わりに用いることができる。撮像システムの座標系と電気光学測定システムとの関係が−例えば上記のように−確立されていて、かつ電気光学システムのセンサ10が撮像システム4に対して安定である限り、この関係によって、局所参照マーカー5なしに、患者2または担持装置3、すなわち患者固定座標系に関して既知の位置にある1つまたは複数のターゲット群11の測定から患者2内の治療すべき位置を直接決定できるようになる。
【0056】
局所参照マーカーが入手可能か、作成されるか、または電気光学システムの相対位置が用いられるかにかかわらず、本発明は、患者内の腫瘍の位置−撮像システムの座標系において決定されたもの−を患者または担持装置に対して既知の座標系、すなわち患者固定座標系へと転送する手段を提供する。
【0057】
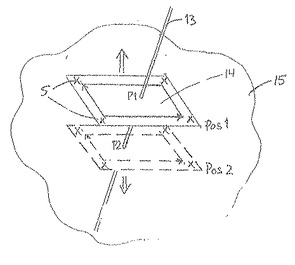
治療システムでは、典型的に、例えばノズルの回転に対して、治療センタの構造に応じた空間における放射線ビームの正確な位置−位置および方向−を決定する手順が存在する。これは典型的に、模式図6に示すように2D撮像放射線センサ14で行われる。例えば電気光学測定システムによって測定された局所参照マーカー9を用いて、放射線センサ14の位置および向きは既知である。放射線センサ14は、2次元センサ表面内の放射線ビーム13の中心を指し示す。これにより、ある放射線センサ位置−図6のPos1−について、放射線ビームに沿った1点P1を決定できる。センサ14を好適な空間方向に沿って例えば図6のPos2に移動させることにより、放射線ビーム13に沿った第2の点P2を決定でき、従ってこの構造についてビーム13の方向を決定できる。
【0058】
与えられる放射線、例えば陽子によるものは、組織への侵入深さとともに大きく変化するものであり、測定が必要となる場合もある。水のような、ヒト組織の特性と似た特性をもつ好適な物質15内に放射線センサ14を置けば、P1、P2における放射線の読取値、およびさらなる放射線センサ位置で測定されるさらなる読取値の相対強度を監視することができ、その特性を測定できる。そのような場合、物質15の容器の外側に局所参照マーカー9を配置し、直線変位計のような別個の測定器を用いて物質15内の放射線センサ14の位置を決定するとさらに実用的である。
【0059】
こうして、本発明は、撮像システムから必要な空間的情報を取り込んで治療システムへ正確に転送し、その情報を用いて治療システムと患者とを適切な相対位置に配置することができる。
【0060】
電気光学測定システムは、連続的に、または所与の間隔で、治療システムと、1つまたは複数のターゲット群、従って患者との、実際の相対位置を測定するのに用いることができる。これらの測定値を用いて、位置決めを検証して誤った治療または不正確な治療を防ぐこともできるし、これらの測定値を、治療システムに対して患者を位置決めするシステムへの閉ループ入力として提供することもできる。
【0061】
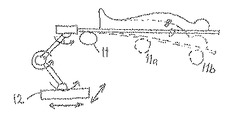
治療システムには、静止型で、それゆえ典型的には模式図7に示すもののようなロボット機構12により、患者を治療システムに対して移動させなければならないものもあれば、1つ以上の軸について可動の−あるいは可動の関連部分を有する−ものもある。
【0062】
可動型のシステムの場合、本発明は、模式図8に示すように治療システムの関連部分を追跡する方法を提供する。このような場合は、1つまたは複数のターゲット群11cを治療システムの可動部分に対して既知の位置に置き、これら1つまたは複数のターゲット群11cおよび患者に接続された1つまたは複数のターゲット群11、11a、11bの位置を測定することによって、それらが互いに対して動くのに応じてそれらの相対位置を決定することができる。この実施の形態では、本発明を用いて、治療システムの変形および担持装置の変形の両方に起因する不正確さやロボットシステムの不正確さを補償し、それにより時間のかかる機器較正手順の必要性を著しく低減することができる。
【0063】
撮像システムとともに用いられる電気光学システムが、治療システムとともに用いられるものと同じでよいが同じである必要はないことに注意されたい。実施の形態によっては、単一の携帯型システムを用いると有利な場合もあるであろう。しかし、たいていの実施の形態では、異なる、より永続的に据え付けられた電気光学システムを撮像システムおよび治療システムそれぞれとともに用いる方が、より有利であると考えられる。
【0064】
また、患者、または治療の必要な患者の体の部分と、担持装置またはストラップ固定機構との関係が、完全には堅固でない場合があり、従って誤差原因になりかねないことにも注意されたい。そのような誤差原因の例は、図7に示すように、患者の荷重による担持装置の機械的な曲げであろう。そのような曲げは重力の方向に対する担持装置の角度とともに変わるものであり、補償しないと、撮像位置と治療位置との間での曲げの変化によって精度目標の数倍の誤差が生じることになる。
【0065】
補償はいくつかの方法で導入できる。例えば、電気光学システムを用いて重力と担持装置とのなす角度を決定することができ、経験・実験データに基づく計算表を用いて荷重、荷重配分、および角度に応じた曲げを推定することができる。あるいは、電気光学測定システムを用いて曲げの量を直接決定するために、1つまたは複数のターゲット群11a、11bを担持装置に沿って置くこともできる。
【0066】
曲げは担持装置を治療システムまたは撮像システムに取り付ける方法にも依存しており、常に担持装置上の同じ取り付け位置を用いると有利である。あるいは、上に概説した方法と同様の方法を用いることもできる。
【0067】
ただし、患者が撮像システムおよび治療システムにおいて同じように保持され、かつ重力に対する角度が同じであれば、患者の体重および位置にかかわらず、担持装置の曲げは、本発明ではいずれの場合も同じになり、補償の必要がない、ということにも注意されたい。
【符号の説明】
【0068】
参照番号一覧
1 腫瘍
2 患者
2a 患者固定座標系
3 担持装置
4 撮像システム
5 局所参照マーカー
5a 撮像システムの局所座標系
6 参照マーカー
6a 共通マスター座標系
8 治療システム
9 局所参照マーカー
9a 治療システムの局所座標系
10 センサ
11、11a、11b、11c ターゲット群
12 ロボット機構
13 ビーム
14 放射線センサ
15 物質
【背景技術】
【0001】
使用分野−背景
現代の医療技術の進歩によって、従来可能であった水準よりも高い幾何学的精度と局所的な効果の可能性を有し、周囲の臓器や組織の損傷を回避する、新しい治療が可能になる。
【0002】
例えば、現在は、がん性腫瘍の放射線照射の際に、より広い範囲を照射するゆえに健康な臓器や組織を大量に損傷する恐れのある旧来の治療法よりも、精度良く行うことが可能である。特に若年患者の場合は、そうした進歩により、放射線治療の結果として後年にがんを発症する可能性が劇的に低下するが、高齢患者の場合もまた、向上した精度のおかげで、周囲の健康な臓器や組織を損傷するリスクの増加なしにより高い放射線量をがん性細胞に照射できるようになる。
【0003】
具体的な例として、陽子線がん治療が、その特有の陽子線吸収特性により、次第に古い放射線治療に取って代わってきている。
【0004】
古い放射線法では有害光線が患者の体に送られ、それにより腫瘍自体だけでなく入出経路全体にわたって損傷が生じてしまう。従って、周囲の臓器や組織での体積当たりの放射線量をできるだけ低く抑えるために、腫瘍を広範囲の角度から照射して、入出経路の放射を多くの臓器や組織に分散させる。このように、意図的な腫瘍の放射線照射と、その結果起こる、非常に危険となりかねない健康な臓器や組織の放射線照射との間には強い関係があるので、腫瘍に対して与えることのできる放射線量が制約され、患者は健康な臓器や組織に損傷を受ける重大なリスクにさらされる。治療中および治療直後の不快が増し、治療の結果として後年にがんを発症する可能性が増加するのである。
【0005】
陽子線は、陽子線を放射線治療システムに非常に適したものにする2つの重要な性質を有することが分かっている。第1に、陽子線は、大きな粒子質量のため散乱が少ないので、より正確に臓器や組織の間に照準を合わせることができる。第2に、陽子線は、いくぶん高めにエネルギーを加えて体内への貫通深さを制御することができ、しかもそのエネルギーの大部分が貫通部の最後の数ミリメートル内に付与される(いわゆるブラッグピーク)。従って、従来の放射線治療の場合よりも厳密に定義された領域に放射線量の狙いを定めることができ、進入経路に沿った損傷が最小化され、標的腫瘍より深い部分の損傷は事実上なくなる。これにより、より効率的な治療のためにより高い放射線量を腫瘍に当てると同時に周囲の健康な臓器や組織への放射線量を大幅に減らし、その結果、後年にがんを発症する可能性をより低くすることが可能である。
【0006】
陽子線治療システムは極めて高価であり、現在、典型的には製造に1億ドルから3億ドルの費用がかかる。従って、この費用を正当化するには、そうしたシステムから受ける利益が最大化されるようにすることが必要である。
【0007】
このような新技術を最大限に活用するためには、治療の幾何学的精度を劇的に向上させることが必要である。例えば、患者内部の腫瘍の大きさと位置を正確に決定し、この情報を、放射線照射が腫瘍位置に正確に施されるようにするため、精度を失わずに撮像システムから放射線治療機器へと転送して活用することが必要である。放射線量が高められ、吸収深さが明確に定められた場合、放射ビームの位置と向きを腫瘍に対して正しく合わせることが明らかに重要である。業界では、全3軸において0.1mmの機器精度という目標が言われている。
【0008】
もちろん、精度が高まることは、古い治療法においても有益である。これは、より良い精度により、放射線等の治療技術自体に固有の限界を前提として、可能な限り最高の治療精度を実現できるからである。
【発明の概要】
【発明が解決しようとする課題】
【0009】
現状技術
例えば腫瘍のような、治療を要する領域の大きさと位置を決定するために、さまざまな撮像技術が用いられる。そうした技術としては、X線、磁気共鳴撮像(MRI)、またはコンピュータ断層撮影(CT)走査などがある。これらのシステムは、治療を要する領域の大きさ、形状、および位置についての情報を、局所的な撮像システム固有の座標系を基準として提供する。
【0010】
多くの撮像システムは、放射線にさらされると損傷を受けやすく、従って放射線システムから離して設置されなければならない。
【0011】
治療の際、治療システムは、腫瘍が最大限の放射線量を受けつつ周囲の臓器や組織の損傷が最小限となるように、治療器具−例えば放射線源−に対して正しい位置に患者を置かなければならない。損傷をさらに低減し、腫瘍の形状を構成するために、多くの場合、放射線照射はさまざまな方向から複数回に分けて行われる。このため、放射線機器に対する腫瘍の位置決めは繰り返し作業になる。
【0012】
患者の幾何学的形状の安定化は通常、さまざまなストラップ固定システム、ギプス、型、固定システム、またはねじさえ用いることにより患者−または患者の体の適切な部分−を機械的な担持装置に機械的に接続することによって行われる。
【0013】
現在、すべての撮像器具および治療器具は、たとえ施設内の遠く離れた部分に設置される場合であっても、しばしば「ISO系」(ISO system)と呼ばれる、共通のマスター座標系に据え付けられる。この共通マスター座標系は、しばしば基準(fiducial)と呼ばれる、施設じゅうに置かれた物理的マーカーによって表される。共通マスター座標系に関するネットワーク全体のマーカーの相対位置は、セオドライトまたはレーザートラッカーのような精密技術を用いて測定される。
【0014】
これを模式図1に示す。同図において、担持装置3上の患者2内部の腫瘍1の位置は、参照マーカー6のネットワークによって表される共通マスター座標系6aに関して正確に既知である局所参照マーカー5を有する撮像システム4によって決定される。
【0015】
模式図2に示すように、治療システム8もまた、参照マーカー6のネットワークによって表される共通マスター座標系6aと正確に連携した局所参照マーカー9を有する。従って、実際上の理由から、参照マーカーのネットワークは、全てのマーカーを共通マスター座標系6aに関して正確に決定できるようにするために、施設じゅうに広がっていなければならない。
【0016】
模式図3は、施設の一部分の例を示す図であり、具体的には、共通マスター座標系6aを確立するために参照マーカー6のネットワークが撮像システム4の位置から治療システム8の位置までどのように広がっているか、を示している。
【0017】
参照マーカーのネットワークを確立するのが、特に大きな施設のさまざまな部屋どうしの間で見通しがきかない場合に、時間のかかる難しい作業であることは、よく知られた問題である。また、典型的には、廊下のような特に関心の無い領域にもマーカーが必要となるが、これは単に、測定器具が実際に関心のあるさまざまな領域を束ねられるようにするために、マーカーが必要とされるためである。これに、建物に名ばかりの安定性しかないという困難さが加わる。非常に重い鋼コンクリート製の建物でさえ、日常の熱負荷および機械的負荷に応じて、言われている0.1mmという目標の何倍も容易に変形してしまうのである。
【0018】
説明のために陽子線治療の例に戻ると、陽子銃/陽子ノズル組立品は、典型的に、重量が何トンもあるどっしりとした構造物である。多くの場合、図2に示すように銃/ノズルは患者の回りに回転可能であり、回転構造の数ミリメートルの変形はよく起こることで、典型的には頻繁な間隔で補償しなければならない。
【0019】
共通マスター座標系の目的は、撮像システムで取得された位置データを、例えば放射線システムのような治療システムへ転送して使用できるようにすることである。従って、ネットワークを確立する際に生じる測定誤差、またはネットワーク自体の不安定性、またはどちらのシステムであれ据え付ける際に生じる取り付け位置不良が、撮像システムと放射線システムとの間で幾何情報を転送する際の精度に影響することになる。明らかに、現在の方式は、大規模な施設じゅうで経時的に0.1mmの精度を保つという要求に応えるには適していない。
【0020】
共通マスター座標系内ですべてのユニットを機械的に位置合わせする必要に加えて、現在の技術水準の下では、各ユニットの局所座標系内での位置ずれを正確に予測することも必要である。例えば、患者担持装置は共通マスター座標系内で操られるので、その据え付け時の正確な位置と向きを知ることが必要なだけでなく、その移動範囲全体にわたる誤差も分かっていなければならない。本質的にはロボットなので、担持装置システムは正確に較正されなければならず、その較正データは、患者の体重、患者の体重配分、および重力に対する担持装置の角度のような、可変パラメータを考慮する必要のある場合がある。同様に、回転する銃/ノズル組立品の特性についても正確に把握して補償する必要があるが、これは、ユニットの位置または方向のいかなるずれも明らかに望ましくないためであり、回転する銃/ノズル組立品は、その大変な重量のため、その移動の弧を通じて著しい変形を示す場合がある。時間経過などの影響に対して0.1mmの精度要求に応え得る補償値を達成するのは、明らかに極めて困難である。
【0021】
従って、現状技術は、著しい労力と費用を負担しているにもかかわらず、言われている精度要求に応えるには適さないのである。
【課題を解決するための手段】
【0022】
本発明
本発明は、撮像システムと治療システムとの間において重要な幾何学的情報を最小限の誤差の蓄積で取得し転送する新しい手法に関係するものである。本発明は、施設全体にわたる共通マスター座標系の必要を完全になくし、施設の大きさや、さまざまな撮像システムおよび治療システムの個々の配置とは無関係に精度を提供し、しかも安定な施設構造に頼ることがない。本発明は、現在の方式におけるほとんどの誤差の寄与分の影響をなくし、据え付け時にシステムを共通マスター座標系に対して位置合わせする必要をなくし、またいくつかのシステム要素の特性のマッピングと較正の必要もなくす。
【0023】
これらの目的は、本発明に従って、請求項1または2に記載されたシステムにより達成される。このシステムの有利な実施の形態は、従属請求項3ないし15に記載されている。
【0024】
従って、本発明は、参照マーカーのネットワークを確立し維持する費用と複雑さを減らしつつ、より高い治療精度を提供する。
【0025】
本発明は、患者固定座標系を導入する。患者−または患者の体の適切な部分−が典型的には担持装置にストラップで固定されて、撮像および治療の際に安定が確保される。1つまたは複数のターゲット群を患者、ストラップ固定機構、または担持装置−これらが互いに安定な位置にある限りどの実施の形態が用いられるかは重要ではない−に取り付けることによって、患者を基準として既知のあらゆる情報が、1つまたは複数のターゲット群に対しても既知となる。
【0026】
ターゲットが、例えば欧州特許第0700506(B1)号明細書、欧州特許第0880674(B1)号明細書、欧州特許第0829701(B1)号明細書、欧州特許第1015845(B1)号明細書、および欧州特許出願公開第1447644(A1)号明細書に記載されているもののような電気光学測定システムによる観測に適する場合、電気光学システムは、それ自体の座標系に関して1つまたは複数のターゲット群の位置を容易に、かつ非常に高い精度で決定することができる。撮像システムもまた、局所参照マーカー−現在は撮像システムを「ISO中心」または共通マスター座標系に位置合わせするために用いられている−を有するので、電気光学測定システムは、それ自体の座標系においてこれらの局所参照マーカーの位置を決定することもできる。局所参照マーカーが電気光学測定システムによる直接観測に適さない場合は、例えば、欧州特許第0607303(B1)号明細書に記載されたもののようなプローブ装置を用いてよい。
【0027】
そして、電気光学測定システムが、患者、ストラップ固定機構、または担持装置に取り付けられた1つまたは複数のターゲット群と撮像システムの局所参照マーカーとの両方を観測すれば、1つまたは複数のターゲット群、すなわち患者固定座標系と、撮像システムの座標系との関係を決定することができる。
【0028】
撮像システムは、患者内部の治療すべき位置を、撮像システムの内部座標系に関して決定する。患者内部の治療すべき位置はこの撮像システムの内部座標系で報告されることになるが、測定された撮像システムの座標系と患者固定座標系との関係を用いることにより、患者内部の治療すべき位置を患者固定座標系において計算することが可能になる。
【0029】
今や患者は撮像システムからいくらでも遠くに移動させることができ、患者固定座標系における患者内部の治療すべき位置についての情報は、精度を失うことなく保持されることになる。
【0030】
この原理を模式図4に示す。同図では、担持装置3上の患者2内部の腫瘍1が、局所参照マーカー5により表される局所座標系5aを有する撮像システム4によって決定される。局所参照マーカー5が撮像システムそのものだけと関係していることに注意されたい。局所参照マーカー5は、他のユニットまたはシステムに関して既知である必要はない。これにより、撮像システムの据え付けおよび取り替えが著しく単純化される。電気光学測定システムは、患者2または担持装置3に関して既知の位置にある1つまたは複数のターゲット群11を観測するセンサ10と、局所参照マーカー5とからなる。従って、局所参照マーカー5に関して取得された腫瘍1の位置についての情報を、患者2または担持装置3、すなわち患者固定座標系に関連付けることが可能である。
【0031】
ここで模式図5を見ると、治療システム8もまた、本発明に従って、治療システムに対して既知の位置にあり外部のユニットまたはシステムからは独立した局所参照マーカー9、を有する。電気光学測定システムのセンサ10は、これらの局所参照マーカー9と、患者2または担持装置3に対して既知の位置にあるターゲット群11とを観測する。従って、腫瘍1の位置は、治療システムの局所参照マーカー9ひいては治療システムの局所座標系9aに関して計算することができる。
【発明の効果】
【0032】
本発明の主な効果は以下の通りである。
1−共通マスター座標系の確立と維持に関する費用と労力の解消
2−全システムの各部を較正する必要の著しい低減
3−ネットワークの不正確さ、システム取り付け位置不良、および時間経過や外部からの影響によるネットワークの不安定さに関する、すべての誤差原因の解消
4−患者内部の治療すべき位置についての幾何情報を撮像システムから治療システムへ転送する際の、高められた精度
5−例えば担持装置の較正精度とは無関係に、治療システムに対して患者を誘導するための閉ループフィードバックを提供する能力
【0033】
これにより、本発明は、上記のように治療システムの運用に著しい改善をもたらし、それらの潜在的利益の実現に著しく貢献する。そうしたシステムには極端な費用のかかるものがあることを考えると、本発明はこれらのシステムをより多くの患者が利用できるようにするための重要な貢献である。
【図面の簡単な説明】
【0034】
【図1】従来の撮像システムの模式図
【図2】従来の治療システムの模式図
【図3】従来の施設の一部分の例を示す図
【図4】本発明の実施の形態の撮像システムの模式図
【図5】本発明の実施の形態の治療システムの模式図
【図6】本発明の実施の形態の2D撮像放射線センサの模式図
【図7】本発明の実施の形態の治療システムのロボット機構の模式図
【図8】本発明の実施の形態の治療システムの模式図
【発明を実施するための形態】
【0035】
発明の詳細
撮像システムは、患者内部の治療すべき領域の空間的位置を決定するのに役立つデータを提供できる、あらゆる種類の診断システムであってよい。典型的な例としては、X線、MRI、およびCTの走査システムなどがある。
【0036】
電気光学システムは、典型的には3種類のモジュール、すなわち1つ以上のセンサと、マーカーを捕捉するための1組のターゲットまたはターゲットを備える機構と、ターゲットの空間的位置を抽出するソフトウェアを備えるコンピュータとからなる。
【0037】
ターゲットおよびマーカーは、受動的、能動的、または機械的といった、さまざまな種類のものにすることができる。
【0038】
受動的なターゲットには、例えば十字線、四角形、円などの規則性のある幾何学的形状またはそれらの組み合わせのような、観測に適した2次元の幾何学的図形が含まれる。受動的なターゲットは、紙、プラスチック膜などのような通常の基材上のマークであってもよいし、あるいは光エネルギーの戻りを最大限に活用するために逆反射性であってもよい。そのようなターゲットは、センサと同期した光源によって、または全般的な背景照明によって照明することができる。
【0039】
受動的なターゲットは、センサシステムに応じて、例えば球の中心、立方体などの多面体の角のような、特徴点の空間的決定に適した3次元の物理的形状、または他の正多面体もしくは明確に定義された物体を含むこともできる。
【0040】
能動的なターゲットは、最良の信号対雑音比を確保するために有利な場合がある。能動的なターゲットには、発光ダイオード、レーザー光源、および白熱光源が含まれる。これらは、センサの露光と同期させられてもよいし、実行される観測に基づくセンサに基づいて自動的に調整されたタイミングおよび強度を有してもよいし、一定のサイクル速度を有してもよいし、常時点灯させられてもよい。
【0041】
能動的なターゲットは、例えば表面に受動的なターゲットパターンが刻まれ、印刷され、または他の方法で付けられた背面照光式の半透明ターゲット面を備えた、受動的な要素を含んでよい。また、能動的なターゲットは、能動的な光源が受動的な表面を照らして投影ターゲットを生成する間接的なものとすることもできる。
【0042】
ターゲットは、センサによって直接観測できない機械的な種類とすることもできるし、センサ位置から直接観測できない位置にあってもよい。そのような場合は、例えば欧州特許第607303(B1)号明細書または欧州特許第0880674(B1)号明細書に記載されたように、観測可能なターゲットが埋め込まれたプローブを用いてターゲット位置を取得することができる。
【0043】
ターゲットがセンサまたは複数のセンサから見え、他のシステム要素の動きと干渉せず、要求精度を達成するのに十分なターゲット間隔を与えるようにするため、ターゲット群の形状および大きさは個別の応用に合わせて設計することができる。
【0044】
精度をあまり失わずに担持装置または患者から取り外しおよび再取り付けできるように高精度の取り付け機構を1つまたは複数のターゲット群11に設けると有利な場合がある。いくつかの好適な機構が、例えば航空機への航法装置の取り付け用や従来の座標測定システムへのプローブの取り付け用に市販されている。
【0045】
こうすれば、群取り付け機構が十分な精度を有し、さまざまな種類または形状のターゲット群がすべて取り付け機構に対して同じ座標系を表す限りにおいて、撮像システムまたは治療システムの種類ごとに異なる種類または形状のターゲット群を使用できるようになる。これは、例えば撮像システムが1つまたは複数のターゲット群のある方向の形状を制約し、治療システムが形状または大きさを別の方向において制約し得る場合に実用的であろう。
【0046】
電気光学システムのセンサもまた、いくつかの異なる種類のものにできる。
【0047】
デジタルのスチルカメラまたはビデオカメラで広く用いられているような2Dセンサを備えたカメラが使用できる。代替となるのは、方位角での三角測量のために2つのセンサが垂直に向けられ、ターゲットまでの仰角の決定のために1つが水平になっている、1Dアレイセンサおよび従来光学系または円筒光学系であろう。また、1Dセンサと2Dセンサとの組み合わせを用いることも可能である。
【0048】
もう1つ代替となるのは、自動式のセオドライトを用いることである。これらの器具は、2Dカメラと、正確に既知の方向に、あるいは特定のターゲットを追尾するために画像解析からのフィードバックでカメラを向けるサーボモータとを内蔵する。
【0049】
2Dカメラとレーザー距離計との組み合わせが、カメラだけを用いるのに比べて、動作範囲を増し、カメラの光軸に沿った精度を向上させることは、例えば欧州特許第EP0880674(B1)号明細書でよく知られており、さまざまな器具が市販されている。そのようなシステムは、ターゲット群の位置を1組の基準に対して決定することもできるので、それらも使うことができる。そのようなセンサが選択された場合に好適なターゲット群の例は、例えばライカジオシステムズ(商標)が販売するT−Mac(商標)製品である。
【0050】
さらに別の可能な電気光学センサ構成は、オートメーテッドプレシジョン社(Automated Precision, Inc.)が販売するインテリプローブ360(IntelliProbe 360)(商標)と原理が似たものであろう。この種のセンサは、従来からある球状に取り付けられた逆反射体などのターゲットを追跡するレーザートラッカーを組み合わせる。これは一点を与えるだけであり、従って空間におけるターゲットの向きを決定することができないため、ユニットの向きを取得するために1組の方位センサが加えられる。方位センサは、ジャイロ計器、傾斜センサ、またはホール効果センサを含んでよい。
【0051】
逆の構成が使えることも、例えば欧州特許第1015842(B1)号明細書で知られている。つまり、電気光学センサが患者または担持装置に対して既知の関係(他の方法ではターゲット群が配置される場所)に置かれ、ターゲット群が好適な安定した位置(例えば、他の方法でセンサが配置される場所)に配置されてよい。
【0052】
発明の実際的な実施の形態
図4の局所参照マーカー5および図5の局所参照マーカー9は、撮像システムおよび治療システムの製造業者から提供されない場合がある。
【0053】
そのような場合、それらは、撮像システムについては、例えば撮像システムによって撮像でき光学測定システムによって測定することもできる撮像システムの動作範囲の内側に局所参照マーカーを置いて電気光学測定システムと撮像システムの座標系との関係が決定され得るようにすることにより、作成することができる。あるいは、互いに対して既知の位置に置かれた、撮像システムに好適なマーカーと電気光学測定システム用のマーカーとを組み合わせたさらに複合したマーカーを用いることもできる。どちらの場合も、単一のマーカーを複数の位置に移動させることもできるし、複数のマーカーを両方のシステムによって測定し撮像することもできる。
【0054】
いったん電気光学測定システムと撮像システムの座標系との関係が決定されると、好ましい種類の参照マーカーを撮像システム上または近傍の好適な位置に置くことができ、撮像システムの座標系に関するそれらの位置を電気光学測定システムによって決定することができる。これによって、電気光学システムによる繰り返し使用に好適なマーカーの配置が可能になり、また実際上の理由から、これらのマーカーは、典型的には撮像システムの動作範囲の外側に配置されることになる。
【0055】
あるいは、撮像システム4の座標系5aと電気光学測定システムの位置および向き−センサ10によって表される−との関係を、局所参照マーカー5の代わりに用いることができる。撮像システムの座標系と電気光学測定システムとの関係が−例えば上記のように−確立されていて、かつ電気光学システムのセンサ10が撮像システム4に対して安定である限り、この関係によって、局所参照マーカー5なしに、患者2または担持装置3、すなわち患者固定座標系に関して既知の位置にある1つまたは複数のターゲット群11の測定から患者2内の治療すべき位置を直接決定できるようになる。
【0056】
局所参照マーカーが入手可能か、作成されるか、または電気光学システムの相対位置が用いられるかにかかわらず、本発明は、患者内の腫瘍の位置−撮像システムの座標系において決定されたもの−を患者または担持装置に対して既知の座標系、すなわち患者固定座標系へと転送する手段を提供する。
【0057】
治療システムでは、典型的に、例えばノズルの回転に対して、治療センタの構造に応じた空間における放射線ビームの正確な位置−位置および方向−を決定する手順が存在する。これは典型的に、模式図6に示すように2D撮像放射線センサ14で行われる。例えば電気光学測定システムによって測定された局所参照マーカー9を用いて、放射線センサ14の位置および向きは既知である。放射線センサ14は、2次元センサ表面内の放射線ビーム13の中心を指し示す。これにより、ある放射線センサ位置−図6のPos1−について、放射線ビームに沿った1点P1を決定できる。センサ14を好適な空間方向に沿って例えば図6のPos2に移動させることにより、放射線ビーム13に沿った第2の点P2を決定でき、従ってこの構造についてビーム13の方向を決定できる。
【0058】
与えられる放射線、例えば陽子によるものは、組織への侵入深さとともに大きく変化するものであり、測定が必要となる場合もある。水のような、ヒト組織の特性と似た特性をもつ好適な物質15内に放射線センサ14を置けば、P1、P2における放射線の読取値、およびさらなる放射線センサ位置で測定されるさらなる読取値の相対強度を監視することができ、その特性を測定できる。そのような場合、物質15の容器の外側に局所参照マーカー9を配置し、直線変位計のような別個の測定器を用いて物質15内の放射線センサ14の位置を決定するとさらに実用的である。
【0059】
こうして、本発明は、撮像システムから必要な空間的情報を取り込んで治療システムへ正確に転送し、その情報を用いて治療システムと患者とを適切な相対位置に配置することができる。
【0060】
電気光学測定システムは、連続的に、または所与の間隔で、治療システムと、1つまたは複数のターゲット群、従って患者との、実際の相対位置を測定するのに用いることができる。これらの測定値を用いて、位置決めを検証して誤った治療または不正確な治療を防ぐこともできるし、これらの測定値を、治療システムに対して患者を位置決めするシステムへの閉ループ入力として提供することもできる。
【0061】
治療システムには、静止型で、それゆえ典型的には模式図7に示すもののようなロボット機構12により、患者を治療システムに対して移動させなければならないものもあれば、1つ以上の軸について可動の−あるいは可動の関連部分を有する−ものもある。
【0062】
可動型のシステムの場合、本発明は、模式図8に示すように治療システムの関連部分を追跡する方法を提供する。このような場合は、1つまたは複数のターゲット群11cを治療システムの可動部分に対して既知の位置に置き、これら1つまたは複数のターゲット群11cおよび患者に接続された1つまたは複数のターゲット群11、11a、11bの位置を測定することによって、それらが互いに対して動くのに応じてそれらの相対位置を決定することができる。この実施の形態では、本発明を用いて、治療システムの変形および担持装置の変形の両方に起因する不正確さやロボットシステムの不正確さを補償し、それにより時間のかかる機器較正手順の必要性を著しく低減することができる。
【0063】
撮像システムとともに用いられる電気光学システムが、治療システムとともに用いられるものと同じでよいが同じである必要はないことに注意されたい。実施の形態によっては、単一の携帯型システムを用いると有利な場合もあるであろう。しかし、たいていの実施の形態では、異なる、より永続的に据え付けられた電気光学システムを撮像システムおよび治療システムそれぞれとともに用いる方が、より有利であると考えられる。
【0064】
また、患者、または治療の必要な患者の体の部分と、担持装置またはストラップ固定機構との関係が、完全には堅固でない場合があり、従って誤差原因になりかねないことにも注意されたい。そのような誤差原因の例は、図7に示すように、患者の荷重による担持装置の機械的な曲げであろう。そのような曲げは重力の方向に対する担持装置の角度とともに変わるものであり、補償しないと、撮像位置と治療位置との間での曲げの変化によって精度目標の数倍の誤差が生じることになる。
【0065】
補償はいくつかの方法で導入できる。例えば、電気光学システムを用いて重力と担持装置とのなす角度を決定することができ、経験・実験データに基づく計算表を用いて荷重、荷重配分、および角度に応じた曲げを推定することができる。あるいは、電気光学測定システムを用いて曲げの量を直接決定するために、1つまたは複数のターゲット群11a、11bを担持装置に沿って置くこともできる。
【0066】
曲げは担持装置を治療システムまたは撮像システムに取り付ける方法にも依存しており、常に担持装置上の同じ取り付け位置を用いると有利である。あるいは、上に概説した方法と同様の方法を用いることもできる。
【0067】
ただし、患者が撮像システムおよび治療システムにおいて同じように保持され、かつ重力に対する角度が同じであれば、患者の体重および位置にかかわらず、担持装置の曲げは、本発明ではいずれの場合も同じになり、補償の必要がない、ということにも注意されたい。
【符号の説明】
【0068】
参照番号一覧
1 腫瘍
2 患者
2a 患者固定座標系
3 担持装置
4 撮像システム
5 局所参照マーカー
5a 撮像システムの局所座標系
6 参照マーカー
6a 共通マスター座標系
8 治療システム
9 局所参照マーカー
9a 治療システムの局所座標系
10 センサ
11、11a、11b、11c ターゲット群
12 ロボット機構
13 ビーム
14 放射線センサ
15 物質
【特許請求の範囲】
【請求項1】
特に陽子線によるがん性腫瘍の治療のための、患者の治療の精度を確保するシステムであって、
前記患者(2)のための担持装置(3)と、
撮像および治療の際に前記担持装置(3)における前記患者(2)の安定を確保するストラップ固定機構と、
前記患者(2)内部の治療すべき位置(1)を決定する撮像システム(4)であって、前記撮像システム(4)の座標系(5a)に関して既知の位置に局所参照マーカー(5)を備える撮像システム(4)と、
治療システム(8)であって、前記治療システム(8)の座標系(9a)に関して既知の位置に同じく局所参照マーカー(9)を備える治療システム(8)と
を備え、
前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられ、患者固定座標系(2a)を規定する1つまたは複数のターゲット群(11)と、
前記1つまたは複数のターゲット群(11)と前記撮像システム(4)の前記局所参照マーカー(5)とを観測して前記患者固定座標系(2a)と前記撮像システム(4)の前記座標系(5a)との関係を決定することにより、前記患者(2)内部の前記治療すべき位置(1)を前記患者固定座標系(2a)において計算できるようにする第1の電気光学測定システムと、
前記1つまたは複数のターゲット群(11)と前記治療システム(8)の前記局所参照マーカー(9)とを観測することにより、前記患者(2)内部の前記治療すべき位置(1)を前記治療システム(8)の前記座標系(9a)において計算できるようにする第2の電気光学測定システムと
を特徴とするシステム。
【請求項2】
特に陽子線によるがん性腫瘍の治療のための、患者の治療の精度を確保するシステムであって、
前記患者(2)のための担持装置(3)と、
撮像および治療の際に前記担持装置(3)における前記患者(2)の安定を確保するストラップ固定機構と、
前記患者(2)内部の治療すべき位置(1)を決定する撮像システム(4)と、
治療システム(8)と
を備え、
前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられ、患者固定座標系(2a)を規定する1つまたは複数のターゲット群(11)と、
第1の電気光学測定システムであって、前記1つまたは複数のターゲット群(11)を観測し、前記撮像システム(4)の座標系(5a)と前記第1の電気光学測定システムの位置および向きとの関係を確立して前記患者固定座標系(2a)と前記撮像システム(4)の前記座標系(5a)との関係を決定することにより、前記患者(2)内部の前記治療すべき位置(1)を前記患者固定座標系(2a)において計算できるようにする第1の電気光学測定システムと、
第2の電気光学測定システムであって、前記1つまたは複数のターゲット群(11)を観測し、前記治療システム(8)の座標系(9a)と前記第2の電気光学測定システムの位置および向きとの関係を確立することにより、前記患者(2)内部の前記治療すべき位置(1)を前記治療システム(8)の前記座標系(9a)において計算できるようにする第2の電気光学測定システムと
を特徴とするシステム。
【請求項3】
前記第1および第2の電気光学測定システムが単一の携帯型システムである請求項1または2に記載のシステム。
【請求項4】
前記電気光学システムが3種類のモジュール、すなわち1つ以上の光学センサ(10)と、前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられた前記1つまたは複数のターゲット群(11)と、ソフトウェアを備えたコンピュータと、を備え、
前記ソフトウェアは、
前記患者固定座標系(2a)と前記撮像システム(4)の前記座標系(5a)との関係を決定することにより、前記患者(2)内部の前記治療すべき位置(1)を前記患者固定座標系(2a)において計算できるようにし、
計算された前記患者固定座標系(2a)における前記患者(2)内部の前記治療すべき位置(1)を用いて、前記治療システム(8)の前記座標系(9a)における前記患者(2)内部の前記治療すべき位置(1)を計算する
請求項1ないし3のうちの1項に記載のシステム。
【請求項5】
前記1つまたは複数のターゲット群(11)が、精度をあまり失わずに取り外しおよび再取り付けされ得るように、高精度の取り付け機構で前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられる請求項1ないし4のうちの1項に記載のシステム。
【請求項6】
前記撮像システムおよび前記治療システムの種類ごとに異なる種類または形状のターゲット群を使用でき、それにより前記異なる種類または形状のターゲット群が前記高精度の取り付け機構に対して同じ座標系を表すようになっている請求項5に記載のシステム。
【請求項7】
前記ターゲット(11)および前記局所参照マーカー(5、9)がそれぞれ、受動的、能動的、または機械的なターゲットおよび局所参照マーカー(5、9)である請求項1ないし6のうちの1項に記載のシステム。
【請求項8】
前記光学センサが
2D撮像センサ、
2D撮像センサの向きを正確に決定するためにエンコーダを組み合わせた2D撮像センサ、
既知の空間的関係にある1組の1D(アレイ)撮像センサ、
レーザー距離計および2D撮像センサ、
レーザー距離計および既知の空間的関係にある1組の1D(アレイ)撮像センサ、及び
1つまたは複数のターゲット群を組み合わせたレーザー距離計であって、前記群の向きを決定するために方位センサも含むレーザー距離計
のうちのいずれかを備える請求項3ないし7のうちの1項に記載のシステム。
【請求項9】
前記撮像システム(4)の前記局所参照マーカー(5)が、前記撮像システム(4)によって撮像でき前記第1の電気光学測定システムによって測定することもできる撮像システム(4)の動作範囲の内側に置かれる請求項1または請求項3ないし8のうちの1項に記載のシステム。
【請求項10】
互いに対して既知の位置に置かれた、前記撮像システムに好適なマーカーと前記電気光学測定システムに好適なマーカーとを組み合わせたさらに複合したマーカーを備える請求項1または請求項3ないし8のうちの1項に記載のシステム。
【請求項11】
複数の位置に移動できる単一のマーカーを備える請求項9または10に記載のシステム。
【請求項12】
前記治療システム(8)の少なくとも部分が可動であり、1つまたは複数のターゲット群(11c)が前記治療システム(8)の前記可動部分に対して既知の位置に置かれて、前記治療システムの前記可動部分に対して既知の位置に置かれた前記1つまたは複数の群(11c)の位置を、前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられた前記1つまたは複数の群(11、11a、11b)の位置に対して決定するようになっている請求項3ないし11のうちの1項に記載のシステム。
【請求項13】
前記電気光学測定システムが重力と前記担持装置(3)とのなす角度を決定するのに好適であり、それにより荷重、荷重配分、および角度に応じた担持装置(3)の曲げが、経験データから得られる計算表に基づいて推定されるようになっている請求項1ないし12のうちの1項に記載のシステム。
【請求項14】
前記電気光学測定システムを用いて曲げの量を直接決定するために前記担持装置(3)に沿って置かれた1つまたは複数のターゲット群(11、11a、11b)を備える請求項1ないし12のうちの1項に記載のシステム。
【請求項15】
前記撮像システム(4)が、X線撮像システム、磁気共鳴撮像システム、またはコンピュータ断層撮影走査システムを含む請求項1ないし14のうちの1項に記載のシステム。
【請求項1】
特に陽子線によるがん性腫瘍の治療のための、患者の治療の精度を確保するシステムであって、
前記患者(2)のための担持装置(3)と、
撮像および治療の際に前記担持装置(3)における前記患者(2)の安定を確保するストラップ固定機構と、
前記患者(2)内部の治療すべき位置(1)を決定する撮像システム(4)であって、前記撮像システム(4)の座標系(5a)に関して既知の位置に局所参照マーカー(5)を備える撮像システム(4)と、
治療システム(8)であって、前記治療システム(8)の座標系(9a)に関して既知の位置に同じく局所参照マーカー(9)を備える治療システム(8)と
を備え、
前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられ、患者固定座標系(2a)を規定する1つまたは複数のターゲット群(11)と、
前記1つまたは複数のターゲット群(11)と前記撮像システム(4)の前記局所参照マーカー(5)とを観測して前記患者固定座標系(2a)と前記撮像システム(4)の前記座標系(5a)との関係を決定することにより、前記患者(2)内部の前記治療すべき位置(1)を前記患者固定座標系(2a)において計算できるようにする第1の電気光学測定システムと、
前記1つまたは複数のターゲット群(11)と前記治療システム(8)の前記局所参照マーカー(9)とを観測することにより、前記患者(2)内部の前記治療すべき位置(1)を前記治療システム(8)の前記座標系(9a)において計算できるようにする第2の電気光学測定システムと
を特徴とするシステム。
【請求項2】
特に陽子線によるがん性腫瘍の治療のための、患者の治療の精度を確保するシステムであって、
前記患者(2)のための担持装置(3)と、
撮像および治療の際に前記担持装置(3)における前記患者(2)の安定を確保するストラップ固定機構と、
前記患者(2)内部の治療すべき位置(1)を決定する撮像システム(4)と、
治療システム(8)と
を備え、
前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられ、患者固定座標系(2a)を規定する1つまたは複数のターゲット群(11)と、
第1の電気光学測定システムであって、前記1つまたは複数のターゲット群(11)を観測し、前記撮像システム(4)の座標系(5a)と前記第1の電気光学測定システムの位置および向きとの関係を確立して前記患者固定座標系(2a)と前記撮像システム(4)の前記座標系(5a)との関係を決定することにより、前記患者(2)内部の前記治療すべき位置(1)を前記患者固定座標系(2a)において計算できるようにする第1の電気光学測定システムと、
第2の電気光学測定システムであって、前記1つまたは複数のターゲット群(11)を観測し、前記治療システム(8)の座標系(9a)と前記第2の電気光学測定システムの位置および向きとの関係を確立することにより、前記患者(2)内部の前記治療すべき位置(1)を前記治療システム(8)の前記座標系(9a)において計算できるようにする第2の電気光学測定システムと
を特徴とするシステム。
【請求項3】
前記第1および第2の電気光学測定システムが単一の携帯型システムである請求項1または2に記載のシステム。
【請求項4】
前記電気光学システムが3種類のモジュール、すなわち1つ以上の光学センサ(10)と、前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられた前記1つまたは複数のターゲット群(11)と、ソフトウェアを備えたコンピュータと、を備え、
前記ソフトウェアは、
前記患者固定座標系(2a)と前記撮像システム(4)の前記座標系(5a)との関係を決定することにより、前記患者(2)内部の前記治療すべき位置(1)を前記患者固定座標系(2a)において計算できるようにし、
計算された前記患者固定座標系(2a)における前記患者(2)内部の前記治療すべき位置(1)を用いて、前記治療システム(8)の前記座標系(9a)における前記患者(2)内部の前記治療すべき位置(1)を計算する
請求項1ないし3のうちの1項に記載のシステム。
【請求項5】
前記1つまたは複数のターゲット群(11)が、精度をあまり失わずに取り外しおよび再取り付けされ得るように、高精度の取り付け機構で前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられる請求項1ないし4のうちの1項に記載のシステム。
【請求項6】
前記撮像システムおよび前記治療システムの種類ごとに異なる種類または形状のターゲット群を使用でき、それにより前記異なる種類または形状のターゲット群が前記高精度の取り付け機構に対して同じ座標系を表すようになっている請求項5に記載のシステム。
【請求項7】
前記ターゲット(11)および前記局所参照マーカー(5、9)がそれぞれ、受動的、能動的、または機械的なターゲットおよび局所参照マーカー(5、9)である請求項1ないし6のうちの1項に記載のシステム。
【請求項8】
前記光学センサが
2D撮像センサ、
2D撮像センサの向きを正確に決定するためにエンコーダを組み合わせた2D撮像センサ、
既知の空間的関係にある1組の1D(アレイ)撮像センサ、
レーザー距離計および2D撮像センサ、
レーザー距離計および既知の空間的関係にある1組の1D(アレイ)撮像センサ、及び
1つまたは複数のターゲット群を組み合わせたレーザー距離計であって、前記群の向きを決定するために方位センサも含むレーザー距離計
のうちのいずれかを備える請求項3ないし7のうちの1項に記載のシステム。
【請求項9】
前記撮像システム(4)の前記局所参照マーカー(5)が、前記撮像システム(4)によって撮像でき前記第1の電気光学測定システムによって測定することもできる撮像システム(4)の動作範囲の内側に置かれる請求項1または請求項3ないし8のうちの1項に記載のシステム。
【請求項10】
互いに対して既知の位置に置かれた、前記撮像システムに好適なマーカーと前記電気光学測定システムに好適なマーカーとを組み合わせたさらに複合したマーカーを備える請求項1または請求項3ないし8のうちの1項に記載のシステム。
【請求項11】
複数の位置に移動できる単一のマーカーを備える請求項9または10に記載のシステム。
【請求項12】
前記治療システム(8)の少なくとも部分が可動であり、1つまたは複数のターゲット群(11c)が前記治療システム(8)の前記可動部分に対して既知の位置に置かれて、前記治療システムの前記可動部分に対して既知の位置に置かれた前記1つまたは複数の群(11c)の位置を、前記患者(2)、前記ストラップ固定機構、または前記担持装置(3)に取り付けられた前記1つまたは複数の群(11、11a、11b)の位置に対して決定するようになっている請求項3ないし11のうちの1項に記載のシステム。
【請求項13】
前記電気光学測定システムが重力と前記担持装置(3)とのなす角度を決定するのに好適であり、それにより荷重、荷重配分、および角度に応じた担持装置(3)の曲げが、経験データから得られる計算表に基づいて推定されるようになっている請求項1ないし12のうちの1項に記載のシステム。
【請求項14】
前記電気光学測定システムを用いて曲げの量を直接決定するために前記担持装置(3)に沿って置かれた1つまたは複数のターゲット群(11、11a、11b)を備える請求項1ないし12のうちの1項に記載のシステム。
【請求項15】
前記撮像システム(4)が、X線撮像システム、磁気共鳴撮像システム、またはコンピュータ断層撮影走査システムを含む請求項1ないし14のうちの1項に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−90923(P2013−90923A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−231280(P2012−231280)
【出願日】平成24年10月19日(2012.10.19)
【出願人】(511097418)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−231280(P2012−231280)
【出願日】平成24年10月19日(2012.10.19)
【出願人】(511097418)
【Fターム(参考)】
[ Back to top ]