
治療中に呼吸と患者の運動を補償するための装置
【課題】患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置が作動しない時に、外科治療の位置的な正確性と医学的有効性とを改善するための装置提供すること。
【解決手段】患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置と、第1検出装置が作動しないときに、患者の身体の外部移動を示す1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、患者の移動を補償するために第1検出装置が作動しないときに、内部標的領域の位置と外部センサの位置との対応関係を創成し、治療すべき内部標的領域の位置を決定するプロセッサとを有し、前記位置は内部標的領域の所定位置に対応する外部マーカの発生位置に基いて決定されることを特徴とする治療中の患者の呼吸および他の移動を補償する装置。
【解決手段】患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置と、第1検出装置が作動しないときに、患者の身体の外部移動を示す1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、患者の移動を補償するために第1検出装置が作動しないときに、内部標的領域の位置と外部センサの位置との対応関係を創成し、治療すべき内部標的領域の位置を決定するプロセッサとを有し、前記位置は内部標的領域の所定位置に対応する外部マーカの発生位置に基いて決定されることを特徴とする治療中の患者の呼吸および他の移動を補償する装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外科治療の位置的な正確性と有効性とを改善するための装置に関する。
【背景技術】
【0002】
この発明は、一般的には、外科治療の正確性と有効性とを改善するための装置、より詳しくは、治療中に、患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置が作動しない時に、治療すべき目標部位の位置を把握すること、及び、呼吸や患者のその他の運動による目標部位の動きを追跡することに関する。
【0003】
或る目標部位に治療を施すために、様々な治療は、その目標部位の動きを正確に追跡する。例えば、放射線治療及び放射線外科では、組織中の細胞を殺すイオン化放射ビームによって組織が破壊される可能性がある。問題は、特に患者の呼吸運動によって、治療中に組織が移動することがあるということである。このような呼吸運動は、外部センサでは追跡しにくい。患者の内的な呼吸運動の広がり及び方向は、旧来の画像装置で視認することができないからである。患者の呼吸や他の運動は、組織に放射線を集中させるのが一層困難であることを意味し、このことは、治療が効果薄になりかねないこと、及び、正常な組織が不必要にダメージを受けかねないことを意味している。
【0004】
組織への放射線投与量の適正な配分を可能にするために、典型的には、放射ビームを治療中に移動させる。従来のシステムでは、ビームは空間中の円弧に沿って移動される。その狙いは、周囲の正常な組織をできるだけ保護しつつ、所定の組織だけに非常に高い投与量の放射線を与えることにある。この放射線外科技術は、脳組織に応用されて劇的な成功を納めてきたが、頭部の外又は首領域へのこの技術の拡張はまだ困難である。これが困難であることの主な理由は、正確な目標の位置把握(すなわち、目標の移動に対する正確な追跡)の問題であった。特に、呼吸運動及び他の器官や患者の運動は、目標組織を高精度で追跡することを困難にし、かくして、周囲の正常な組織を保護しつつ、所定の組織に高い投与量の放射線を与えるという目的を達成することが困難になる。更に、従来のシステムは、放射線ビームを空間中の円弧に沿って移動させることができるだけであって、不規則な呼吸運動を容易に追跡することができない。これらの呼吸運動は、放射線ビームが辿る円弧の軸線に沿って起こるとは限らないからである。
【0005】
別の放射線外科技術は、米国特許第5,207,223号に開示されているように、放射線ビームを目標に向ける6つの自由度を有する機械的ロボット装置を使用している。このロボット装置は、配向された治療用ビームを目標部位に当てるために、放射線治療用ビームが正確に位置決めされるのを可能にしている。米国特許第5,769,861号には、神経外科ナビゲーション方法が開示されている。この方法は、脳組織のような不動の目標を発見することに関するものであって、呼吸による肺のような、皮膚表面に対する目標器官の運動を追跡すること、或いは、外部から視認できる運動に対する腹腔内部の器官の運動を追跡することは課題にしていない。画像装置によって検出できるように人体内に移植されることのあるフィデューシャル(視準マーク)も開示されており、フィデューシャルインプラントは、人体の骨又は器官に移植される。このフィデューシャルインプラントは、人体の内部構造が分析されるのを可能にしているが、呼吸サイクル全体を通じて運動する目標器官の運動を補償することを意図してはいない。そこで、放射線治療に際して、呼吸や他の患者の運動を補償するための装置及び方法を提供することが望ましく、これが、本発明の目的である。
【発明の開示】
【0006】
本発明に従って、目標器官に配置された内部マーカを、内部器官のような運動する目標部位の位置及び運動を正確に追跡する1つ又は複数の外部センサと組み合わせた、患者の呼吸や他の運動を補償するための装置及び方法が提供される。特に、X線によって周期的に判定される内部マーカの位置が、外部センサの位置と組み合わせられてもよい。内部マーカを画像化するためには、X線のように侵襲性の技術が必要であるから、内部マーカは周期的に画像化すればよい。治療中は、外部マーカのような外部の継続的又はリアルタイムセンサが、外部運動を判定する。かくして、目標器官の位置は、内部マーカが周期的に画像化されたときには内部マーカの位置によって正確に判定され、内部マーカが画像化されていないときは、外部センサのデータに基づいて判定されてもよい。内部マーカの位置、従って目標器官の位置が外部センサの位置によって正確に判定できるように、外部センサに対する内部マーカの位置及び移動が判定される。かくして、目的の器官の位置は、医療処置が行われている間中、正確に判定される。
【0007】
内部マーカは、患者の体内のマーカを画像化できるX線、核磁気共鳴、超音波並びにその他の技術を含む数多くの画像化装置を使用して画像化することができる。或いは、内部の目標部位の位置を確定するために、各個離散したフィデューシャルの代わりに、三次元超音波画像を使用することもできる。外部センサの位置も、外部マーカの画像化が可能な赤外線画像化、視覚映像化、磁気的位置把握、呼吸の測定、並びにその他の方式の技術を含む数多くの技術を使用して判定することができる。外部センサを使用することに加えて(すなわち、外部フィデューシャルは、使えないこともある)、内部フィデューシャルと相関する体表面を視覚的に画像化することもできる。
【0008】
かくして、本発明に従って、患者の呼吸及び他の運動を測定しつつ、場合によってはこれらを補償しつつ、内部の目標部位に対する治療を行うための装置が提供される。この装置は、内部の目標部位についての位置情報を周期的に発生するための第1の画像化装置と、患者の身体に付けられた1つ又は複数の外部マーカについての位置情報を継続的に発生するための第2の画像化装置とを備える。この装置は、更に、内部の目標部位の位置と外部マーカ又はセンサ読取り値との対応を生成するために、内部目標部位に関する位置情報と外部センサ読取り値/測定値とを受け取るプロセッサと、外部マーカ又はセンサ読取り値に基づいて、治療を患者の目標部位の位置に向けさせる治療装置とを備える。治療中に患者の運動を補償するための装置が開示されると共に、患者の運動を補償するための方法も開示される。
【図面の簡単な説明】
【0009】
【図1】慣用の放射線治療装置を示す図面である。
【図2】放射線治療装置をより詳細に示す図面である。
【図3】放射線治療装置をより詳細に示す図面である。
【図4】放射線治療装置を示すブロック図である。
【図5】標的器官が移動するときの標的器官上の内部マーカを示す図面である。
【図6】X線装置により撮像される標的器官に取り付けられる一つ以上の内部マーカを示す図面である。
【図7A】本発明による内部マーカの画像を示す図面である。
【図7B】本発明による内部マーカの画像を示す図面である。
【図7C】本発明による内部マーカの画像を示す図面である。
【図7D】本発明による内部マーカの画像を示す図面である。
【図8】本発明による標的領域の移動を追跡するための外部マーカと組み合せた内部マーカを示す図面である。
【図9A】本発明による安全シームの減少を示す図面である。
【図9B】本発明による安全シームの減少を示す図面である。
【図9C】本発明による安全シームの減少を示す図面である。
【図9D】本発明による安全シームの減少を示す図面である。
【図10】放射線手術装置内での呼吸および他の移動を補償する方法を示すフローチャートである。
【図11】本発明による内部マーカと外部マーカとを相関付ける方法を示すフローチャートである。
【発明を実施するための形態】
【0010】
本発明は、特に、放射線治療(放射線手術)中の患者の呼吸および他の移動を補償する装置および方法に適用でき、本発明はこの点に関して説明する。
しかしながら、本発明の装置および方法は、生検針、切除、超音波または他のエネルギ合焦器具の位置決めまたはレーザビーム治療用レーザビーム位置決めを行う他の形式の医療機器を用いる他の形式の医療処置にも大きな実用性を有している。本発明の説明の前に、本発明のより良き理解を可能にするため,一般的な放射線手術装置について説明する。
【0011】
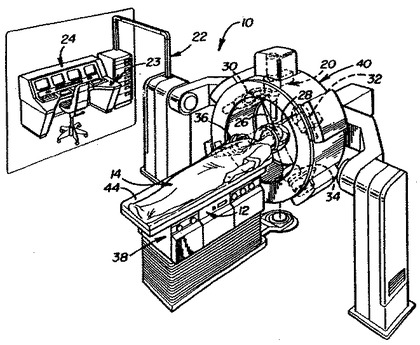
図1〜図4は、定位(stereotaxic)放射線治療装置10の一例を示す。放射線治療装置10は、マイクロプロセッサのようなデータプロセッサ12と、患者14の3次元画像を記憶するディスクまたはテープ記憶ユニット13(図4)とを有している。3次元画像は、未だローディングされていない場合には、データプロセッサ内にローディングして、該3次元画像と、手術中に得られた画像と比較する。3次元画像は、コンピュータ断層撮像(CAT)スキャンまたは磁気共鳴撮像(MR)等の種々の慣用技術により創成される。また、放射線治療装置10はビーム発生装置20を有し、該装置20は、作動されると、標的領域18(図2)に向けられる照準手術用イオン化ビームを放射する。照準手術用イオン化ビームは、標的領域を壊死させるのに充分な強度を有する。リニア加速器好ましくはX線リニア加速器等のイオン化放射線または重粒子ビームを発生する種々のビーム発生装置を使用できる。このようなX線ビーム発生装置は商業的に入手できる。ビーム発生装置は、オペレータが、ケーブル22を介してビーム発生装置に接続された制御コンソール24でスイッチ23を投入することにより作動される。
【0012】
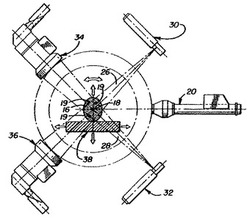
放射線治療装置10はまた、3次元画像により、以前に撮像された領域に第1診断ビーム26および第2診断ビーム28を通す装置を有している。両診断ビームは、図2に直交状態で示すように、互いに所定の非ゼロ角度で配置される。両診断ビームは、それぞれ、第1X線発生器30および第2X線発生器32により発生される。第1および第2画像レシーバ34、36が診断ビーム26、28を受けて、マイクロプロセッサ12に供給される診断ビームから画像を創成し(図4)、診断画像が3次元画像と比較される。
【0013】
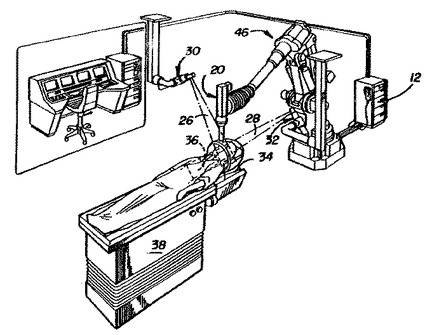
放射線治療装置10はまた、イオン化ビームが標的領域18上に連続的に合焦されるように、ビーム発生装置20と患者14との相対位置を調節する装置を有している。図1に示した放射線治療装置では、ビーム発生装置および患者の位置は、ガントリ40および可動オペレーティングテーブル38により6自由度で変えることができる。患者に対するビーム発生装置の位置は、6運動軸線をもつプロセッサ制御可能なロボットアーム機構46(図3)を用いて変えることもできる。ロボットアーム機構46は、ビーム発生装置20を患者の身体の回りで自由に(患者の身体に沿って上方、下方、長手方向または横方向に)移動させることができる。
【0014】
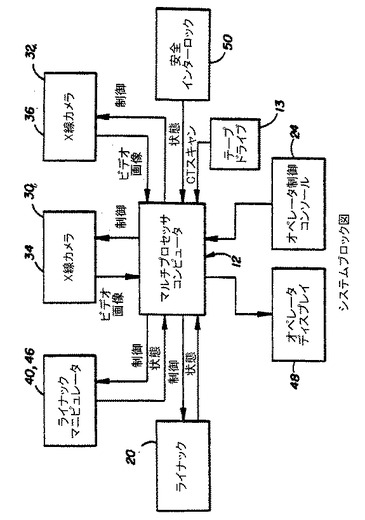
図4は、上記のようなマイクロプロセッサ12、テープドライブ13、ビーム発生装置20、ロボットアーム46またはガントリ40、X線カメラ30、32、34、36、およびオペレータ制御コンソール24を備えた放射線治療装置10のブロック図である。装置10には更に、ビーム発生装置20が不意に作動されないようにする安全インターロック50を設けることもできる。装置10にはまた、治療の進行を追跡しかつ治療を制御するためのオペレータディスプレイ48を設けることができる。放射線治療装置の更なる詳細は、本件出願人が所有しかつ本願に援用する米国特許第5,207,223号に開示されている。
【0015】
放射線治療または放射線手術で照射すべき領域に正確に標的を合わせるには、治療中に標的が配置される位置を高精度で決定する必要がある。脳は硬い頭蓋に対して固定されているので、上記放射線手術装置は、理想的には脳腫瘍または頭部腫瘍の治療に使用される。放射線手術装置はまた、イオン化ビームが標的領域を照射することを容易に確保できる他の固定標的領域(但し、健康組織を包囲していない領域)にも使用できる。しかしながら、標的が横隔膜に隣接している場合には、患者の呼吸によって標的が治療中に移動してしまうであろう。患者が呼吸するか、治療中に患者が移動するときは、肺および他の器官が移動するであろう。従って、放射線治療を含む種々の治療中に、移動する標的領域に従動させる装置および方法を提供することが望まれている。本発明の装置は、患者の呼吸により引き起こされる標的領域の移動並びに患者の他の移動により引き起こされる標的領域の移動を補償する。
【0016】
本発明によれば、内部器官のような内部移動する標的領域の位置を決定するため、後述のような外部マーカおよび内部マーカ(ランドマーク)が使用され、治療の前に、一連の画像に基いて両マーカの相対移動のモデルが決定される。治療中、X線のような侵襲性装置を用いて内部マーカが周期的に撮像される場合を除き、内部ランドマークの位置に関する情報は殆ど得られない。しかしながら、胸部および/または腹部の外部マーカの位置またはビデオ画像は、高精度および/または高速で決定される。同様に、外部センサは、測定データをリアルタイムで、すなわち非常に高速に供給できる。かくして、内部マーカと外部マーカとの相対位置の術前モデルを参照して内部の(正確な)マーカの位置を推測することにより、外部ランドマークの位置を治療中にリアルタイムで使用できる。確認のため、内部マーカの位置を治療中に周期的に測定できる。本発明に従って呼吸および患者の他の移動を補償する装置を以下に説明する。
【0017】
図5は、患者の身体150内の標的器官151上に置かれる本発明の1組の内部マーカ152を示す図面である。移動する標的器官151として、例えば、患者が移動するか、吸気または呼気するときに移動する肺または肝臓等の横隔膜の近くの器官がある。本発明により、標的器官の移動を追跡して、イオン化放射のような治療が標的器官に適用され、健康な周囲組織には適用されないようにすることが望まれる。標的器官151の移動を追跡するため、1つ以上の内部マーカ152が標的器官151上の種々の位置に取り付けられる。この場合、標的器官が移動すると、内部マーカも矢印154で示すように移動する。内部マーカの移動から、標的器官の位置を正確に決定できる。好ましい実施形態では、標的器官の種々の領域の移動を測定するのに1つ以上の内部マーカを使用でき、また内部マーカは金で作ることができる。これにより、内部マーカは体外から見ることはできないが、撮像技術(定位X線撮像が好ましいが、超音波を使用することもできる)を用いて見ることができる。
【0018】
図6は、定位X線装置により撮像される標的器官151に取り付けられる1つ以上の内部マーカ152を示す図面である。図6に示すように、標的器官151上の内部マーカ152は、第1X線源160および第2X線源162により撮像される。両X線源160、162は、図1〜図3に示した診断X線ビームと同様に、互いに或る所定角度をなして配置される。両X線源は第1および第2診断X線ビーム164、166を発生し、両診断X線ビームは、内部マーカ152の近くで標的器官151を通り、かつそれぞれ第1および第2X線レシーバ168、170により受けられる。両X線レシーバ168、170は、X線ビームを受けて、該X線に対応する電気信号を発生する。定位X線装置は、創成された画像を分析することにより、内部マーカ152の正確な位置を決定できる。
【0019】
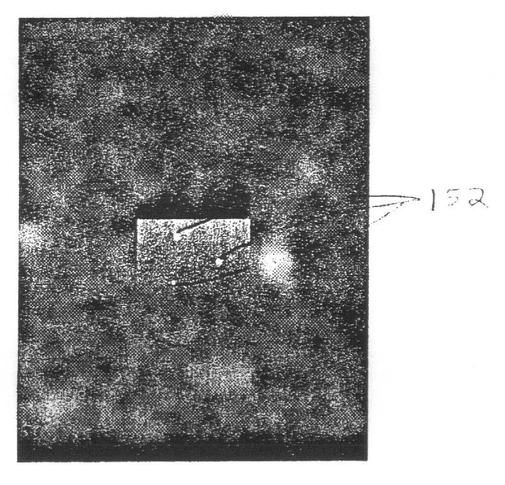
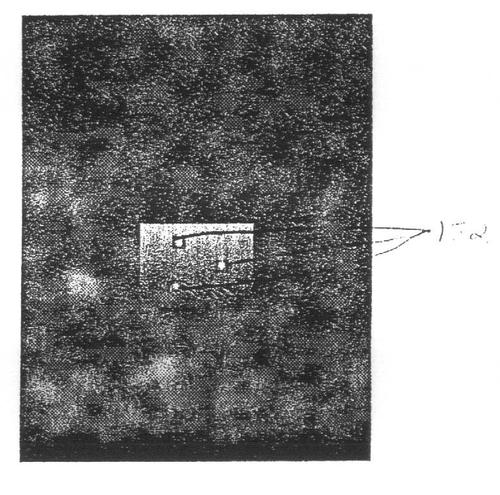
図7A〜図7Dは、本発明による内部マーカ152を含む標的器官のX線画像の例を示す。図7Aおよび図7Cは同じX線画像であり、それぞれ、内部マーカ152が強調されていないもの、およびコンピュータ処理により強調されたものである。同様に図7Bおよび図7Dも同じX線画像であり、それぞれ、内部マーカが強調されていないもの、およびコンピュータ処理により強調されたものである。かくして、定位X線撮像は、内部マーカの正確な位置を決定できる。問題は、定位X線装置の使用では、治療中の所定間隔においてのみ内部マーカの位置を決定できるに過ぎないことである。より詳しくは、X線診断撮像が行われている間は治療ビームは付勢されないため、内部マーカの撮像間隔は、放射線への患者の被曝を制限する上で必要である。しかしながら、標的器官の正確な位置を周期的に決定するだけでは、患者の呼吸および他の移動を正確に補償するためには不充分である。従って、図8を参照して説明するように、1つ以上の外部マーカが、本発明に従って標的器官の近くで患者の皮膚上に配置される。外部マーカに代えて、胸部および/または腹部の移動のビデオ画像を観察することにより、呼吸の現在状態を測定できる。
【0020】
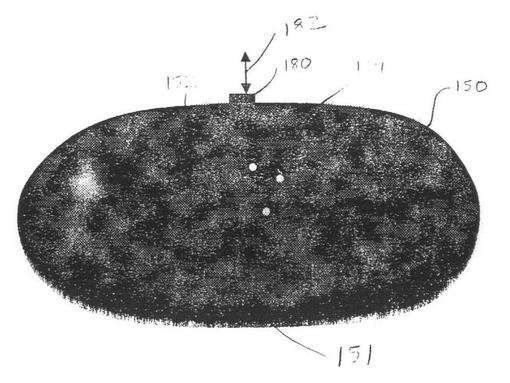
図8は、本発明に従って、患者の皮膚に取り付けられた1つ以上の外部マーカ180と組み合わされた内部マーカ152を有する患者の身体150内の標的器官151を示す図面である。患者の皮膚に取り付けられる1つ以上の外部マーカ180は、腹壁または胸壁の移動の測定を可能にする。患者の呼吸の例では、外部マーカは、患者が吸気および呼気するときに外部移動を追跡する。外部マーカ180は、赤外線または可視光等の多くの光学的方法により自動的に追跡され、外部マーカの位置は1秒間に60回以上測定される。外部マーカは、患者のウエストの周囲に装着されるベルト、可撓性リングまたはベストに取り付けることもできる。
【0021】
しかしながら、患者の移動を補償するのに外部マーカのみを使用する場合には、標的器官が小さく移動するのに対して外部マーカは大きく移動すること(およびこの逆の場合)があるため、標的器官の内部移動を正確に反映できない。外部マーカは、患者の移動を補償するのに充分なほど正確ではない。従って、標的器官の移動を正確に追跡するには内部マーカと外部マーカとを組み合せる必要がある。かくして、標的器官の移動の正確な追跡を行うため、内部マーカの周期的X線撮像は外部マーカの連続的な光学的追跡と同期される。内部マーカの移動と外部マーカの移動とを同期させるためには、治療プロセスの開始時に生じるであろう内部マーカの位置と外部マーカの位置との間の関係を決定する必要があり、これを、図10を参照して以下に説明する。
【0022】
標的器官の何らかの移動が検出されたならば、上記放射線手術のような治療システムは、多数の方法で当該移動を補償する。例えば治療システムは、患者に対してビーム発生装置20等の治療装置を移動させること(およびこの逆)ができる。治療システムはまた、治療装置の経路内に、成形装置または照準装置を移動させることもできる。治療システムはまた、標的器官が治療経路内にあるときにのみ治療装置を作動させ、標的器官が治療経路内にない場合には治療装置を遮断する。本発明の移動補償装置の1つの利益を以下に示しかつ説明する。
【0023】
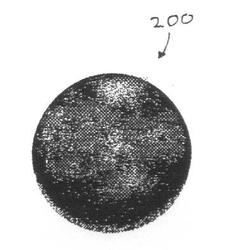
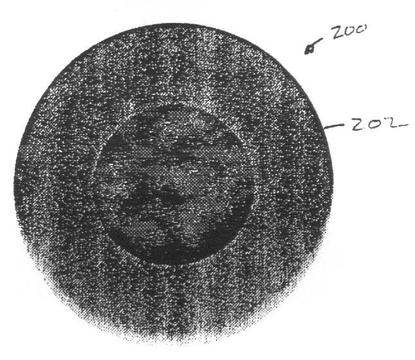
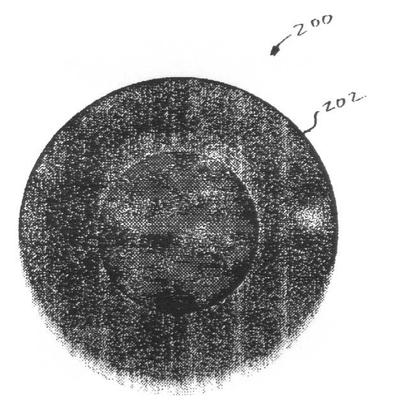
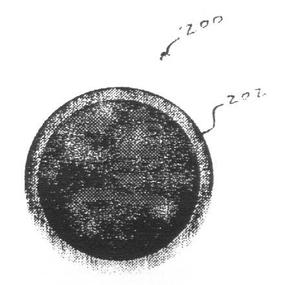
図9A〜図9Dは、本発明による移動補償装置の1つの利益を示す図面である。特に図9Aは、安全シームを用いない、治療すべき部分(volume)200を示す。より詳しくは、この部分200には安全シームが全く設けられないため、治療すべき標的領域の位置が正確に分り、従って健康組織が損傷を受けることはない。患者の呼吸および他の移動により移動する標的器官のように、標的領域を正確に決定できない場合には、部分200は、図9Bに示すような安全シーム202を必要とする。安全シームに付随する問題は、必要放射線が、標的の直径に従って非常に迅速に増大することである。例えば、球状標的の場合には、標的の直径と必要線量との比は3乗に比例(cubic)する。図9Cには、一般的な放射線手術装置に使用する安全シーム202が示されている。図9Dには、本発明による移動補償装置および方法により可能な非常に小さい安全シーム202が示されている。安全シームの1/2の小型化により、1/8だけ線量の体積減少が得られる。特に不快な予後を伴う種々の癌の場合に、一般的な放射線手術装置と本発明の移動補償装置とを組み合せることにより、治療効果は大幅に改善される。次に、本発明による治療中の移動補償方法について説明する。
【0024】
図10は、放射線手術装置等を用いた治療中の患者の呼吸および他の移動を補償する方法210を示すフローチャートである。この方法の最初の数段階は、患者の実際の治療前の時点で行われる。より詳しくは、外科医は、段階212で、短い外科的処置の間に、標的器官内またはその近傍に1組の内部マーカを取り付け、次に段階214で、治療の直前に、標的器官の近くの患者の胸壁または腹壁に1組の外部マーカを取り付ける。次に、段階216で、患者の治療を開始する直前に、放射線手術装置のプロセッサが、内部マーカの位置と外部マーカの位置とを相関付ける。内部マーカと外部マーカとを相関付ける方法は、図11を参照して後で説明する。内部マーカの位置と外部マーカの位置とがひとたび相関付けられたならば、患者の治療が開始される。本発明の次の段階は、患者の治療中に行われる。
【0025】
最初に、装置は、内部マーカが撮像された最終時点からの全経過時間が、所定の秒数に等しいか否かを決定する。所定秒数は、好ましくは2〜10秒の間であり、より好ましくは約10秒である。全経過時間が所定秒数に等しい場合には、段階220で、治療ビームが除勢され、かつ例えば定位X線撮像を用いて内部マーカが撮像される。次に、全経過時間がゼロにリセットされ、本発明の方法は段階218に戻る。かくして、本発明によれば、内部マーカは所定秒数毎に撮像される。段階218に戻り、全経過時間が所定秒数に等しくないと決定された場合には、段階224で、外部マーカが光学的に追跡され、同時に段階226で、治療ビームが付勢される。外部マーカは、位置データが1秒間に60回の頻度で放射線手術装置のプロセッサに供給されるように追跡される。次にプロセッサは外部マーカの位置と内部マーカの位置とを相関付け、標的器官の位置のあらゆる変化に関する位置データを発生する。かくして、内部マーカの周期的撮像の間に、標的の位置を追跡するのに外部マーカの位置が使用される。
【0026】
標的器官の何らかの移動が検出されると、上記放射線手術装置等の治療システムは、種々の方法で移動を補償する。例えば、治療システムは、患者に対して、ビーム発生装置20等の治療装置を移動させるか、逆に治療装置に対して患者を移動させる。治療装置はまた、成形装置または照準装置を治療装置の経路内に移動させて、治療装置の特性を変化させる。治療システムはまた、標的器官が治療経路内にあるときにのみ治療装置を付勢し、標的器官が治療経路内にない場合には治療装置を遮断する。次に、本発明により内部マーカと外部マーカとを相関付ける方法を説明する。
【0027】
図11は、本発明により内部マーカの位置と外部マーカの位置とを相関付ける方法230を示すフローチャートである。この方法の幾つかの段階は術前のプロセス中に行われ、一方、実際の治療中に幾つかの段階が行われる。より詳しくは、段階232では、術前フェーズの間に内部マーカおよび外部マーカに対応する複数のポイントが創成されるように、全呼吸サイクルに亘って内部マーカおよび外部マーカの両者についての一連の時系列画像を創成する。外部マーカおよび内部マーカに対応する複数の各ポイントは、ポイントクラウドと呼ばれる。次に、段階234では、放射線手術装置のプロセッサが、一曲線を、内部マーカについて創成されたポイントに適合させ、かつ別の曲線を、外部マーカにより創成されたポイントに適合させる。これらの曲線は、外部マーカの位置と内部マーカの位置とを互いに相関付けることができる。
【0028】
段階236では、実際の治療中に、システムは、特定時点で赤外線撮像のような技術により外部マーカの位置xを創成し、該位置xは外部マーカの位置の以前に創成された曲線に適合される。次に、段階238では、両曲線を比較することにより、位置xに対応する内部マーカ曲線上のポイントの位置yを決定する。これは、補間法として知られた方法である。この方法は、各マーカについて行われる。この方法を使用して外部マーカの位置が内部マーカの位置に相関付けられ、これにより、システムが、内部器官を実際に撮像することなく標的器官の移動量を正確に決定することができる。内部マーカの位置と外部マーカの位置との相関付けを行う他の方法は、補間法を遂行すべく学習された神経回路網を使用すること、またはポイントクラウドを計算した後に、内部マーカと外部マーカとの対応関係を確立する既知の数学的補間法を使用することである。
【0029】
次に、本発明により患者の呼吸と他の移動とを補償する方法の4つの異なる実施形態を説明する。これらの全ての実施形態において、呼吸および横隔膜による移動は限定的であり、かつ腹部を縛るか押さえることにより最小にされる。第1実施形態では、1つ以上の小さい金属マーカ(ランドマークとしても知られている)が、治療前に標的器官に取り付けられる。できるならば異なる形状またはサイズをもつ3つまたは4つの金属マーカ、例えば小さい金のビーズを使用できる。これらの内部マーカの正確な位置は、標的部位の立体画像を撮る2つのX線カメラにより決定される。また、1つ以上の赤外線プローブを患者の皮膚表面に取り付けることもできる。赤外線プローブは非常に正確かつ高速の位置読取りを行うが、患者の身体の表面を示すに過ぎない。この実施形態では、内部マーカの内部撮像と外部マーカの外部撮像(すなわち、X線撮像と赤外線撮像)とが組み合わされる。より詳しくは、治療前には、両様式(すなわち、それぞれX線および赤外線)の一連の画像が得られる。これらの画像では、画像獲得時点が記録される。すなわち、少なくとも両様式の画像が同時に得られ、従って画像獲得時点が約0.01秒以上に変化することはない。このように、外部ランドマークおよび内部ランドマークの一連の術前画像が得られ、各画像はタイムスタンプを有する。これらの一連の画像は、上記のように内部ランドマークと外部ランドマークとの間の相対移動の一モデルを決定する。
【0030】
実際の手術中には、患者を過剰の放射線に曝露できないことおよびX線撮像が行われるときには治療ビームが作動できないことのため、所定の秒数毎に2回以上のX線画像を得ることは困難である。従って、X線撮像単独では遅過ぎて、呼吸移動に高精度で従動することができない。従って、赤外線システムに見られるような皮膚表面上の外部ランドマークが術中局所化(intra-operative localization)に使用され、ここでは、内部マーカと外部マーカとの相対移動の以前に計算されたモデルを連続的に参照する。これにより、X線画像が得られない時点で、内部ランドマーク(金のビーズ)の正確な配置を予測できる。次に、本発明の方法の第2実施形態を説明する。
【0031】
本発明による方法の第2実施形態では、標的器官に取り付けられる内部ランドマークは全く使用されない。その代わりに、赤外線追跡システムと組み合せて超音波カメラを使用して、一連の術前画像を得る。この実施形態の赤外線システムは、外部ランドマークの位置と、この術前フェーズの間にオペレータが移動しなくてはならない(可動)超音波カメラの位置との両位置を確立する。術前フェーズ中に、標的を位置決めするため、超音波画像が手動または半自動的に分析される。治療中、獲得した移動モデルは外部マーカの位置から内部標的器官の位置を決定できるため、標的器官の移動を補償するのに外部ランドマーク(赤外線プローブ)が使用される。次に、本発明の方法の第3実施形態を説明する。
【0032】
この第3実施形態は、超音波カメラの代わりに空気流測定装置を使用する点を除き、第2実施形態に非常に良く似ている。空気流測定装置は、空気流の方向および体積を記録しかつこれらの測定値と、内部基準点または内部器官の位置を検出する他の任意の機構の位置とを相関付けるマウスピースで構成できる。この実施形態では、現在の呼吸状態と測定前の状態とを相関付けるのに、肺のような標的器官の基準位置、例えば完全呼気状態または完全吸気状態または任意の中間呼吸状態が使用され、これにより、標的器官の移動および位置が治療中に決定され、かつ標的器官の決定された移動に基いて治療装置の位置が移動される。次に、本発明の第4実施形態を説明する。
【0033】
本発明の第4実施形態では、僅かに異なる技術が使用される。より詳しくは、殆どの放射線治療中、患者は目覚めていて意識があるため、外部マーカのリアルタイム追跡により観察される移動が、実際に、呼吸によるものか患者の身体の他の小さい移動によるものかを決定することはしばしば困難である。このような身体の他の移動は、例えばくしゃみその他の突発的な運動により引き起こされる。これらの他の移動を検出しかつ追跡するため、上記超音波カメラに加えて1対のX線カメラを使用できる。この実施形態では、超音波カメラは、標的移動と上記のような外部ランドマークの移動との相関関係を決定すべく、術前に使用されるに過ぎない。かくして、患者の皮膚表面の移動と標的器官との間の関係を決定するため、一連の術前画像が再び獲得される。治療中、X線カメラは、X線画像中の骨のようなランドマークを自動的に見出すための良く知られたコンピュータ方法に基いて、患者の突発移動を決定するのに使用される。これらのX線画像は、術前断層画像(CTまたはMR画像)と比較されて、患者の突発移動を決定する。
【0034】
以上、本発明をその特定実施形態を参照して説明したが、当業者ならば、特許請求の範囲に記載の本発明の原理および精神から逸脱することなく、実施形態に変更を施すことができるであろう。
【技術分野】
【0001】
本発明は、外科治療の位置的な正確性と有効性とを改善するための装置に関する。
【背景技術】
【0002】
この発明は、一般的には、外科治療の正確性と有効性とを改善するための装置、より詳しくは、治療中に、患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置が作動しない時に、治療すべき目標部位の位置を把握すること、及び、呼吸や患者のその他の運動による目標部位の動きを追跡することに関する。
【0003】
或る目標部位に治療を施すために、様々な治療は、その目標部位の動きを正確に追跡する。例えば、放射線治療及び放射線外科では、組織中の細胞を殺すイオン化放射ビームによって組織が破壊される可能性がある。問題は、特に患者の呼吸運動によって、治療中に組織が移動することがあるということである。このような呼吸運動は、外部センサでは追跡しにくい。患者の内的な呼吸運動の広がり及び方向は、旧来の画像装置で視認することができないからである。患者の呼吸や他の運動は、組織に放射線を集中させるのが一層困難であることを意味し、このことは、治療が効果薄になりかねないこと、及び、正常な組織が不必要にダメージを受けかねないことを意味している。
【0004】
組織への放射線投与量の適正な配分を可能にするために、典型的には、放射ビームを治療中に移動させる。従来のシステムでは、ビームは空間中の円弧に沿って移動される。その狙いは、周囲の正常な組織をできるだけ保護しつつ、所定の組織だけに非常に高い投与量の放射線を与えることにある。この放射線外科技術は、脳組織に応用されて劇的な成功を納めてきたが、頭部の外又は首領域へのこの技術の拡張はまだ困難である。これが困難であることの主な理由は、正確な目標の位置把握(すなわち、目標の移動に対する正確な追跡)の問題であった。特に、呼吸運動及び他の器官や患者の運動は、目標組織を高精度で追跡することを困難にし、かくして、周囲の正常な組織を保護しつつ、所定の組織に高い投与量の放射線を与えるという目的を達成することが困難になる。更に、従来のシステムは、放射線ビームを空間中の円弧に沿って移動させることができるだけであって、不規則な呼吸運動を容易に追跡することができない。これらの呼吸運動は、放射線ビームが辿る円弧の軸線に沿って起こるとは限らないからである。
【0005】
別の放射線外科技術は、米国特許第5,207,223号に開示されているように、放射線ビームを目標に向ける6つの自由度を有する機械的ロボット装置を使用している。このロボット装置は、配向された治療用ビームを目標部位に当てるために、放射線治療用ビームが正確に位置決めされるのを可能にしている。米国特許第5,769,861号には、神経外科ナビゲーション方法が開示されている。この方法は、脳組織のような不動の目標を発見することに関するものであって、呼吸による肺のような、皮膚表面に対する目標器官の運動を追跡すること、或いは、外部から視認できる運動に対する腹腔内部の器官の運動を追跡することは課題にしていない。画像装置によって検出できるように人体内に移植されることのあるフィデューシャル(視準マーク)も開示されており、フィデューシャルインプラントは、人体の骨又は器官に移植される。このフィデューシャルインプラントは、人体の内部構造が分析されるのを可能にしているが、呼吸サイクル全体を通じて運動する目標器官の運動を補償することを意図してはいない。そこで、放射線治療に際して、呼吸や他の患者の運動を補償するための装置及び方法を提供することが望ましく、これが、本発明の目的である。
【発明の開示】
【0006】
本発明に従って、目標器官に配置された内部マーカを、内部器官のような運動する目標部位の位置及び運動を正確に追跡する1つ又は複数の外部センサと組み合わせた、患者の呼吸や他の運動を補償するための装置及び方法が提供される。特に、X線によって周期的に判定される内部マーカの位置が、外部センサの位置と組み合わせられてもよい。内部マーカを画像化するためには、X線のように侵襲性の技術が必要であるから、内部マーカは周期的に画像化すればよい。治療中は、外部マーカのような外部の継続的又はリアルタイムセンサが、外部運動を判定する。かくして、目標器官の位置は、内部マーカが周期的に画像化されたときには内部マーカの位置によって正確に判定され、内部マーカが画像化されていないときは、外部センサのデータに基づいて判定されてもよい。内部マーカの位置、従って目標器官の位置が外部センサの位置によって正確に判定できるように、外部センサに対する内部マーカの位置及び移動が判定される。かくして、目的の器官の位置は、医療処置が行われている間中、正確に判定される。
【0007】
内部マーカは、患者の体内のマーカを画像化できるX線、核磁気共鳴、超音波並びにその他の技術を含む数多くの画像化装置を使用して画像化することができる。或いは、内部の目標部位の位置を確定するために、各個離散したフィデューシャルの代わりに、三次元超音波画像を使用することもできる。外部センサの位置も、外部マーカの画像化が可能な赤外線画像化、視覚映像化、磁気的位置把握、呼吸の測定、並びにその他の方式の技術を含む数多くの技術を使用して判定することができる。外部センサを使用することに加えて(すなわち、外部フィデューシャルは、使えないこともある)、内部フィデューシャルと相関する体表面を視覚的に画像化することもできる。
【0008】
かくして、本発明に従って、患者の呼吸及び他の運動を測定しつつ、場合によってはこれらを補償しつつ、内部の目標部位に対する治療を行うための装置が提供される。この装置は、内部の目標部位についての位置情報を周期的に発生するための第1の画像化装置と、患者の身体に付けられた1つ又は複数の外部マーカについての位置情報を継続的に発生するための第2の画像化装置とを備える。この装置は、更に、内部の目標部位の位置と外部マーカ又はセンサ読取り値との対応を生成するために、内部目標部位に関する位置情報と外部センサ読取り値/測定値とを受け取るプロセッサと、外部マーカ又はセンサ読取り値に基づいて、治療を患者の目標部位の位置に向けさせる治療装置とを備える。治療中に患者の運動を補償するための装置が開示されると共に、患者の運動を補償するための方法も開示される。
【図面の簡単な説明】
【0009】
【図1】慣用の放射線治療装置を示す図面である。
【図2】放射線治療装置をより詳細に示す図面である。
【図3】放射線治療装置をより詳細に示す図面である。
【図4】放射線治療装置を示すブロック図である。
【図5】標的器官が移動するときの標的器官上の内部マーカを示す図面である。
【図6】X線装置により撮像される標的器官に取り付けられる一つ以上の内部マーカを示す図面である。
【図7A】本発明による内部マーカの画像を示す図面である。
【図7B】本発明による内部マーカの画像を示す図面である。
【図7C】本発明による内部マーカの画像を示す図面である。
【図7D】本発明による内部マーカの画像を示す図面である。
【図8】本発明による標的領域の移動を追跡するための外部マーカと組み合せた内部マーカを示す図面である。
【図9A】本発明による安全シームの減少を示す図面である。
【図9B】本発明による安全シームの減少を示す図面である。
【図9C】本発明による安全シームの減少を示す図面である。
【図9D】本発明による安全シームの減少を示す図面である。
【図10】放射線手術装置内での呼吸および他の移動を補償する方法を示すフローチャートである。
【図11】本発明による内部マーカと外部マーカとを相関付ける方法を示すフローチャートである。
【発明を実施するための形態】
【0010】
本発明は、特に、放射線治療(放射線手術)中の患者の呼吸および他の移動を補償する装置および方法に適用でき、本発明はこの点に関して説明する。
しかしながら、本発明の装置および方法は、生検針、切除、超音波または他のエネルギ合焦器具の位置決めまたはレーザビーム治療用レーザビーム位置決めを行う他の形式の医療機器を用いる他の形式の医療処置にも大きな実用性を有している。本発明の説明の前に、本発明のより良き理解を可能にするため,一般的な放射線手術装置について説明する。
【0011】
図1〜図4は、定位(stereotaxic)放射線治療装置10の一例を示す。放射線治療装置10は、マイクロプロセッサのようなデータプロセッサ12と、患者14の3次元画像を記憶するディスクまたはテープ記憶ユニット13(図4)とを有している。3次元画像は、未だローディングされていない場合には、データプロセッサ内にローディングして、該3次元画像と、手術中に得られた画像と比較する。3次元画像は、コンピュータ断層撮像(CAT)スキャンまたは磁気共鳴撮像(MR)等の種々の慣用技術により創成される。また、放射線治療装置10はビーム発生装置20を有し、該装置20は、作動されると、標的領域18(図2)に向けられる照準手術用イオン化ビームを放射する。照準手術用イオン化ビームは、標的領域を壊死させるのに充分な強度を有する。リニア加速器好ましくはX線リニア加速器等のイオン化放射線または重粒子ビームを発生する種々のビーム発生装置を使用できる。このようなX線ビーム発生装置は商業的に入手できる。ビーム発生装置は、オペレータが、ケーブル22を介してビーム発生装置に接続された制御コンソール24でスイッチ23を投入することにより作動される。
【0012】
放射線治療装置10はまた、3次元画像により、以前に撮像された領域に第1診断ビーム26および第2診断ビーム28を通す装置を有している。両診断ビームは、図2に直交状態で示すように、互いに所定の非ゼロ角度で配置される。両診断ビームは、それぞれ、第1X線発生器30および第2X線発生器32により発生される。第1および第2画像レシーバ34、36が診断ビーム26、28を受けて、マイクロプロセッサ12に供給される診断ビームから画像を創成し(図4)、診断画像が3次元画像と比較される。
【0013】
放射線治療装置10はまた、イオン化ビームが標的領域18上に連続的に合焦されるように、ビーム発生装置20と患者14との相対位置を調節する装置を有している。図1に示した放射線治療装置では、ビーム発生装置および患者の位置は、ガントリ40および可動オペレーティングテーブル38により6自由度で変えることができる。患者に対するビーム発生装置の位置は、6運動軸線をもつプロセッサ制御可能なロボットアーム機構46(図3)を用いて変えることもできる。ロボットアーム機構46は、ビーム発生装置20を患者の身体の回りで自由に(患者の身体に沿って上方、下方、長手方向または横方向に)移動させることができる。
【0014】
図4は、上記のようなマイクロプロセッサ12、テープドライブ13、ビーム発生装置20、ロボットアーム46またはガントリ40、X線カメラ30、32、34、36、およびオペレータ制御コンソール24を備えた放射線治療装置10のブロック図である。装置10には更に、ビーム発生装置20が不意に作動されないようにする安全インターロック50を設けることもできる。装置10にはまた、治療の進行を追跡しかつ治療を制御するためのオペレータディスプレイ48を設けることができる。放射線治療装置の更なる詳細は、本件出願人が所有しかつ本願に援用する米国特許第5,207,223号に開示されている。
【0015】
放射線治療または放射線手術で照射すべき領域に正確に標的を合わせるには、治療中に標的が配置される位置を高精度で決定する必要がある。脳は硬い頭蓋に対して固定されているので、上記放射線手術装置は、理想的には脳腫瘍または頭部腫瘍の治療に使用される。放射線手術装置はまた、イオン化ビームが標的領域を照射することを容易に確保できる他の固定標的領域(但し、健康組織を包囲していない領域)にも使用できる。しかしながら、標的が横隔膜に隣接している場合には、患者の呼吸によって標的が治療中に移動してしまうであろう。患者が呼吸するか、治療中に患者が移動するときは、肺および他の器官が移動するであろう。従って、放射線治療を含む種々の治療中に、移動する標的領域に従動させる装置および方法を提供することが望まれている。本発明の装置は、患者の呼吸により引き起こされる標的領域の移動並びに患者の他の移動により引き起こされる標的領域の移動を補償する。
【0016】
本発明によれば、内部器官のような内部移動する標的領域の位置を決定するため、後述のような外部マーカおよび内部マーカ(ランドマーク)が使用され、治療の前に、一連の画像に基いて両マーカの相対移動のモデルが決定される。治療中、X線のような侵襲性装置を用いて内部マーカが周期的に撮像される場合を除き、内部ランドマークの位置に関する情報は殆ど得られない。しかしながら、胸部および/または腹部の外部マーカの位置またはビデオ画像は、高精度および/または高速で決定される。同様に、外部センサは、測定データをリアルタイムで、すなわち非常に高速に供給できる。かくして、内部マーカと外部マーカとの相対位置の術前モデルを参照して内部の(正確な)マーカの位置を推測することにより、外部ランドマークの位置を治療中にリアルタイムで使用できる。確認のため、内部マーカの位置を治療中に周期的に測定できる。本発明に従って呼吸および患者の他の移動を補償する装置を以下に説明する。
【0017】
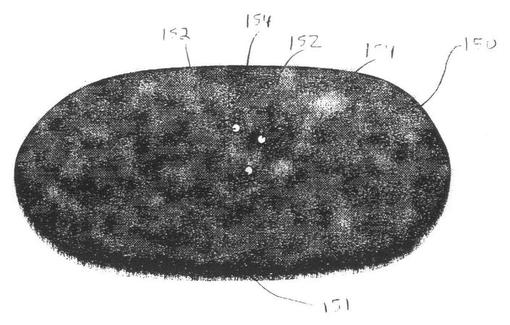
図5は、患者の身体150内の標的器官151上に置かれる本発明の1組の内部マーカ152を示す図面である。移動する標的器官151として、例えば、患者が移動するか、吸気または呼気するときに移動する肺または肝臓等の横隔膜の近くの器官がある。本発明により、標的器官の移動を追跡して、イオン化放射のような治療が標的器官に適用され、健康な周囲組織には適用されないようにすることが望まれる。標的器官151の移動を追跡するため、1つ以上の内部マーカ152が標的器官151上の種々の位置に取り付けられる。この場合、標的器官が移動すると、内部マーカも矢印154で示すように移動する。内部マーカの移動から、標的器官の位置を正確に決定できる。好ましい実施形態では、標的器官の種々の領域の移動を測定するのに1つ以上の内部マーカを使用でき、また内部マーカは金で作ることができる。これにより、内部マーカは体外から見ることはできないが、撮像技術(定位X線撮像が好ましいが、超音波を使用することもできる)を用いて見ることができる。
【0018】
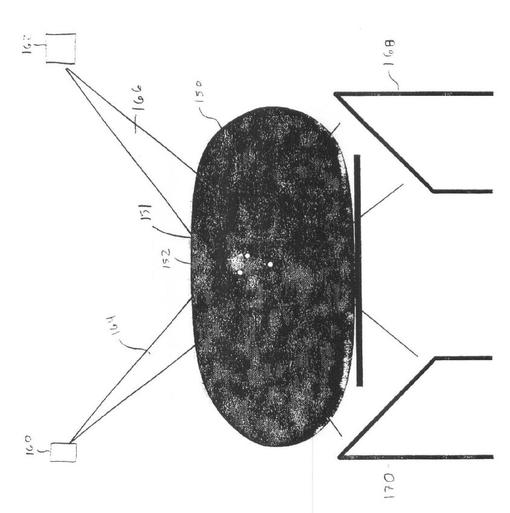
図6は、定位X線装置により撮像される標的器官151に取り付けられる1つ以上の内部マーカ152を示す図面である。図6に示すように、標的器官151上の内部マーカ152は、第1X線源160および第2X線源162により撮像される。両X線源160、162は、図1〜図3に示した診断X線ビームと同様に、互いに或る所定角度をなして配置される。両X線源は第1および第2診断X線ビーム164、166を発生し、両診断X線ビームは、内部マーカ152の近くで標的器官151を通り、かつそれぞれ第1および第2X線レシーバ168、170により受けられる。両X線レシーバ168、170は、X線ビームを受けて、該X線に対応する電気信号を発生する。定位X線装置は、創成された画像を分析することにより、内部マーカ152の正確な位置を決定できる。
【0019】
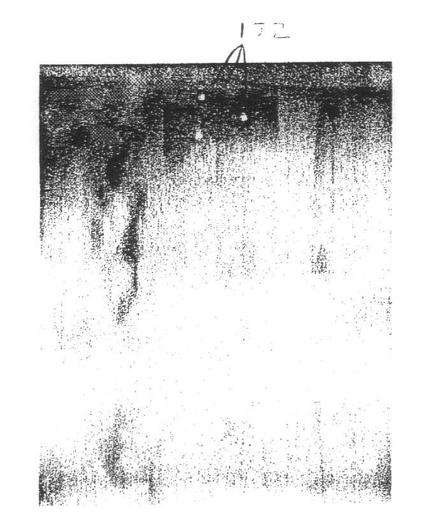
図7A〜図7Dは、本発明による内部マーカ152を含む標的器官のX線画像の例を示す。図7Aおよび図7Cは同じX線画像であり、それぞれ、内部マーカ152が強調されていないもの、およびコンピュータ処理により強調されたものである。同様に図7Bおよび図7Dも同じX線画像であり、それぞれ、内部マーカが強調されていないもの、およびコンピュータ処理により強調されたものである。かくして、定位X線撮像は、内部マーカの正確な位置を決定できる。問題は、定位X線装置の使用では、治療中の所定間隔においてのみ内部マーカの位置を決定できるに過ぎないことである。より詳しくは、X線診断撮像が行われている間は治療ビームは付勢されないため、内部マーカの撮像間隔は、放射線への患者の被曝を制限する上で必要である。しかしながら、標的器官の正確な位置を周期的に決定するだけでは、患者の呼吸および他の移動を正確に補償するためには不充分である。従って、図8を参照して説明するように、1つ以上の外部マーカが、本発明に従って標的器官の近くで患者の皮膚上に配置される。外部マーカに代えて、胸部および/または腹部の移動のビデオ画像を観察することにより、呼吸の現在状態を測定できる。
【0020】
図8は、本発明に従って、患者の皮膚に取り付けられた1つ以上の外部マーカ180と組み合わされた内部マーカ152を有する患者の身体150内の標的器官151を示す図面である。患者の皮膚に取り付けられる1つ以上の外部マーカ180は、腹壁または胸壁の移動の測定を可能にする。患者の呼吸の例では、外部マーカは、患者が吸気および呼気するときに外部移動を追跡する。外部マーカ180は、赤外線または可視光等の多くの光学的方法により自動的に追跡され、外部マーカの位置は1秒間に60回以上測定される。外部マーカは、患者のウエストの周囲に装着されるベルト、可撓性リングまたはベストに取り付けることもできる。
【0021】
しかしながら、患者の移動を補償するのに外部マーカのみを使用する場合には、標的器官が小さく移動するのに対して外部マーカは大きく移動すること(およびこの逆の場合)があるため、標的器官の内部移動を正確に反映できない。外部マーカは、患者の移動を補償するのに充分なほど正確ではない。従って、標的器官の移動を正確に追跡するには内部マーカと外部マーカとを組み合せる必要がある。かくして、標的器官の移動の正確な追跡を行うため、内部マーカの周期的X線撮像は外部マーカの連続的な光学的追跡と同期される。内部マーカの移動と外部マーカの移動とを同期させるためには、治療プロセスの開始時に生じるであろう内部マーカの位置と外部マーカの位置との間の関係を決定する必要があり、これを、図10を参照して以下に説明する。
【0022】
標的器官の何らかの移動が検出されたならば、上記放射線手術のような治療システムは、多数の方法で当該移動を補償する。例えば治療システムは、患者に対してビーム発生装置20等の治療装置を移動させること(およびこの逆)ができる。治療システムはまた、治療装置の経路内に、成形装置または照準装置を移動させることもできる。治療システムはまた、標的器官が治療経路内にあるときにのみ治療装置を作動させ、標的器官が治療経路内にない場合には治療装置を遮断する。本発明の移動補償装置の1つの利益を以下に示しかつ説明する。
【0023】
図9A〜図9Dは、本発明による移動補償装置の1つの利益を示す図面である。特に図9Aは、安全シームを用いない、治療すべき部分(volume)200を示す。より詳しくは、この部分200には安全シームが全く設けられないため、治療すべき標的領域の位置が正確に分り、従って健康組織が損傷を受けることはない。患者の呼吸および他の移動により移動する標的器官のように、標的領域を正確に決定できない場合には、部分200は、図9Bに示すような安全シーム202を必要とする。安全シームに付随する問題は、必要放射線が、標的の直径に従って非常に迅速に増大することである。例えば、球状標的の場合には、標的の直径と必要線量との比は3乗に比例(cubic)する。図9Cには、一般的な放射線手術装置に使用する安全シーム202が示されている。図9Dには、本発明による移動補償装置および方法により可能な非常に小さい安全シーム202が示されている。安全シームの1/2の小型化により、1/8だけ線量の体積減少が得られる。特に不快な予後を伴う種々の癌の場合に、一般的な放射線手術装置と本発明の移動補償装置とを組み合せることにより、治療効果は大幅に改善される。次に、本発明による治療中の移動補償方法について説明する。
【0024】
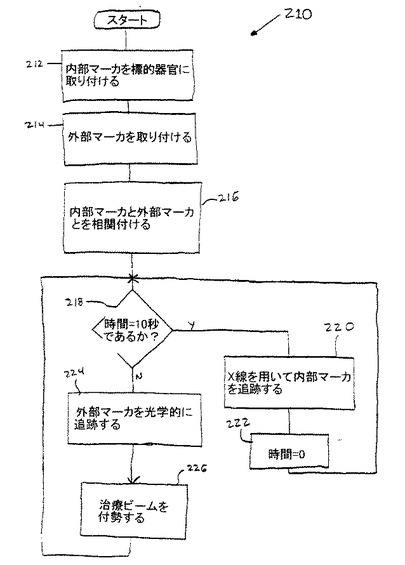
図10は、放射線手術装置等を用いた治療中の患者の呼吸および他の移動を補償する方法210を示すフローチャートである。この方法の最初の数段階は、患者の実際の治療前の時点で行われる。より詳しくは、外科医は、段階212で、短い外科的処置の間に、標的器官内またはその近傍に1組の内部マーカを取り付け、次に段階214で、治療の直前に、標的器官の近くの患者の胸壁または腹壁に1組の外部マーカを取り付ける。次に、段階216で、患者の治療を開始する直前に、放射線手術装置のプロセッサが、内部マーカの位置と外部マーカの位置とを相関付ける。内部マーカと外部マーカとを相関付ける方法は、図11を参照して後で説明する。内部マーカの位置と外部マーカの位置とがひとたび相関付けられたならば、患者の治療が開始される。本発明の次の段階は、患者の治療中に行われる。
【0025】
最初に、装置は、内部マーカが撮像された最終時点からの全経過時間が、所定の秒数に等しいか否かを決定する。所定秒数は、好ましくは2〜10秒の間であり、より好ましくは約10秒である。全経過時間が所定秒数に等しい場合には、段階220で、治療ビームが除勢され、かつ例えば定位X線撮像を用いて内部マーカが撮像される。次に、全経過時間がゼロにリセットされ、本発明の方法は段階218に戻る。かくして、本発明によれば、内部マーカは所定秒数毎に撮像される。段階218に戻り、全経過時間が所定秒数に等しくないと決定された場合には、段階224で、外部マーカが光学的に追跡され、同時に段階226で、治療ビームが付勢される。外部マーカは、位置データが1秒間に60回の頻度で放射線手術装置のプロセッサに供給されるように追跡される。次にプロセッサは外部マーカの位置と内部マーカの位置とを相関付け、標的器官の位置のあらゆる変化に関する位置データを発生する。かくして、内部マーカの周期的撮像の間に、標的の位置を追跡するのに外部マーカの位置が使用される。
【0026】
標的器官の何らかの移動が検出されると、上記放射線手術装置等の治療システムは、種々の方法で移動を補償する。例えば、治療システムは、患者に対して、ビーム発生装置20等の治療装置を移動させるか、逆に治療装置に対して患者を移動させる。治療装置はまた、成形装置または照準装置を治療装置の経路内に移動させて、治療装置の特性を変化させる。治療システムはまた、標的器官が治療経路内にあるときにのみ治療装置を付勢し、標的器官が治療経路内にない場合には治療装置を遮断する。次に、本発明により内部マーカと外部マーカとを相関付ける方法を説明する。
【0027】
図11は、本発明により内部マーカの位置と外部マーカの位置とを相関付ける方法230を示すフローチャートである。この方法の幾つかの段階は術前のプロセス中に行われ、一方、実際の治療中に幾つかの段階が行われる。より詳しくは、段階232では、術前フェーズの間に内部マーカおよび外部マーカに対応する複数のポイントが創成されるように、全呼吸サイクルに亘って内部マーカおよび外部マーカの両者についての一連の時系列画像を創成する。外部マーカおよび内部マーカに対応する複数の各ポイントは、ポイントクラウドと呼ばれる。次に、段階234では、放射線手術装置のプロセッサが、一曲線を、内部マーカについて創成されたポイントに適合させ、かつ別の曲線を、外部マーカにより創成されたポイントに適合させる。これらの曲線は、外部マーカの位置と内部マーカの位置とを互いに相関付けることができる。
【0028】
段階236では、実際の治療中に、システムは、特定時点で赤外線撮像のような技術により外部マーカの位置xを創成し、該位置xは外部マーカの位置の以前に創成された曲線に適合される。次に、段階238では、両曲線を比較することにより、位置xに対応する内部マーカ曲線上のポイントの位置yを決定する。これは、補間法として知られた方法である。この方法は、各マーカについて行われる。この方法を使用して外部マーカの位置が内部マーカの位置に相関付けられ、これにより、システムが、内部器官を実際に撮像することなく標的器官の移動量を正確に決定することができる。内部マーカの位置と外部マーカの位置との相関付けを行う他の方法は、補間法を遂行すべく学習された神経回路網を使用すること、またはポイントクラウドを計算した後に、内部マーカと外部マーカとの対応関係を確立する既知の数学的補間法を使用することである。
【0029】
次に、本発明により患者の呼吸と他の移動とを補償する方法の4つの異なる実施形態を説明する。これらの全ての実施形態において、呼吸および横隔膜による移動は限定的であり、かつ腹部を縛るか押さえることにより最小にされる。第1実施形態では、1つ以上の小さい金属マーカ(ランドマークとしても知られている)が、治療前に標的器官に取り付けられる。できるならば異なる形状またはサイズをもつ3つまたは4つの金属マーカ、例えば小さい金のビーズを使用できる。これらの内部マーカの正確な位置は、標的部位の立体画像を撮る2つのX線カメラにより決定される。また、1つ以上の赤外線プローブを患者の皮膚表面に取り付けることもできる。赤外線プローブは非常に正確かつ高速の位置読取りを行うが、患者の身体の表面を示すに過ぎない。この実施形態では、内部マーカの内部撮像と外部マーカの外部撮像(すなわち、X線撮像と赤外線撮像)とが組み合わされる。より詳しくは、治療前には、両様式(すなわち、それぞれX線および赤外線)の一連の画像が得られる。これらの画像では、画像獲得時点が記録される。すなわち、少なくとも両様式の画像が同時に得られ、従って画像獲得時点が約0.01秒以上に変化することはない。このように、外部ランドマークおよび内部ランドマークの一連の術前画像が得られ、各画像はタイムスタンプを有する。これらの一連の画像は、上記のように内部ランドマークと外部ランドマークとの間の相対移動の一モデルを決定する。
【0030】
実際の手術中には、患者を過剰の放射線に曝露できないことおよびX線撮像が行われるときには治療ビームが作動できないことのため、所定の秒数毎に2回以上のX線画像を得ることは困難である。従って、X線撮像単独では遅過ぎて、呼吸移動に高精度で従動することができない。従って、赤外線システムに見られるような皮膚表面上の外部ランドマークが術中局所化(intra-operative localization)に使用され、ここでは、内部マーカと外部マーカとの相対移動の以前に計算されたモデルを連続的に参照する。これにより、X線画像が得られない時点で、内部ランドマーク(金のビーズ)の正確な配置を予測できる。次に、本発明の方法の第2実施形態を説明する。
【0031】
本発明による方法の第2実施形態では、標的器官に取り付けられる内部ランドマークは全く使用されない。その代わりに、赤外線追跡システムと組み合せて超音波カメラを使用して、一連の術前画像を得る。この実施形態の赤外線システムは、外部ランドマークの位置と、この術前フェーズの間にオペレータが移動しなくてはならない(可動)超音波カメラの位置との両位置を確立する。術前フェーズ中に、標的を位置決めするため、超音波画像が手動または半自動的に分析される。治療中、獲得した移動モデルは外部マーカの位置から内部標的器官の位置を決定できるため、標的器官の移動を補償するのに外部ランドマーク(赤外線プローブ)が使用される。次に、本発明の方法の第3実施形態を説明する。
【0032】
この第3実施形態は、超音波カメラの代わりに空気流測定装置を使用する点を除き、第2実施形態に非常に良く似ている。空気流測定装置は、空気流の方向および体積を記録しかつこれらの測定値と、内部基準点または内部器官の位置を検出する他の任意の機構の位置とを相関付けるマウスピースで構成できる。この実施形態では、現在の呼吸状態と測定前の状態とを相関付けるのに、肺のような標的器官の基準位置、例えば完全呼気状態または完全吸気状態または任意の中間呼吸状態が使用され、これにより、標的器官の移動および位置が治療中に決定され、かつ標的器官の決定された移動に基いて治療装置の位置が移動される。次に、本発明の第4実施形態を説明する。
【0033】
本発明の第4実施形態では、僅かに異なる技術が使用される。より詳しくは、殆どの放射線治療中、患者は目覚めていて意識があるため、外部マーカのリアルタイム追跡により観察される移動が、実際に、呼吸によるものか患者の身体の他の小さい移動によるものかを決定することはしばしば困難である。このような身体の他の移動は、例えばくしゃみその他の突発的な運動により引き起こされる。これらの他の移動を検出しかつ追跡するため、上記超音波カメラに加えて1対のX線カメラを使用できる。この実施形態では、超音波カメラは、標的移動と上記のような外部ランドマークの移動との相関関係を決定すべく、術前に使用されるに過ぎない。かくして、患者の皮膚表面の移動と標的器官との間の関係を決定するため、一連の術前画像が再び獲得される。治療中、X線カメラは、X線画像中の骨のようなランドマークを自動的に見出すための良く知られたコンピュータ方法に基いて、患者の突発移動を決定するのに使用される。これらのX線画像は、術前断層画像(CTまたはMR画像)と比較されて、患者の突発移動を決定する。
【0034】
以上、本発明をその特定実施形態を参照して説明したが、当業者ならば、特許請求の範囲に記載の本発明の原理および精神から逸脱することなく、実施形態に変更を施すことができるであろう。
【特許請求の範囲】
【請求項1】
患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置と、
第1検出装置が作動しないときに、患者の身体の外部移動を示す1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、
患者の移動を補償するために第1検出装置が作動しないときに、内部標的領域の位置と外部センサの位置との対応関係を創成し、治療すべき内部標的領域の位置を決定するプロセッサとを有し、前記位置は内部標的領域の所定位置に対応する外部マーカの発生位置に基いて決定される
ことを特徴とする治療中の患者の呼吸および他の移動を補償する装置。
【請求項2】
前記第1検出装置は、患者の体内の内部標的領域に取り付けられる1つ以上のマーカと、患者の体内のマーカを撮像する撮像装置とを有することを特徴とする請求項1記載の装置。
【請求項3】
前記撮像装置は定位X線装置を有することを特徴とする請求項2記載の装置。
【請求項4】
前記1つ以上のマーカは、内部標的領域に取り付けられる金属ビーズを有することを特徴とする請求項3記載の装置。
【請求項5】
前記第1検出装置は、治療前に内部標的領域を撮像する超音波装置を有することを特徴とする請求項1記載の装置。
【請求項6】
前記第1検出装置は更に、治療中の患者の移動を検出する撮像装置を有することを特徴とする請求項5記載の装置。
【請求項7】
前記撮像装置は定位X線装置を有することを特徴とする請求項6記載の装置。
【請求項8】
前記第2検出装置は、患者の身体に取り付けられる1つ以上の赤外線マーカと、該赤外線マーカを撮像する赤外線撮像装置とを有することを特徴とする請求項1記載の装置。
【請求項9】
前記第2検出装置は可視撮像装置を有することを特徴とする請求項1記載の装置。
【請求項10】
前記第2検出装置は、患者の呼吸を測定する流量計を有することを特徴とする請求項1記載の装置。
【請求項11】
前記第2検出装置は更に、患者の腹を押さえて呼吸運動を制限する手段を有することを特徴とする請求項10記載の装置。
【請求項12】
前記プロセッサは更に、内部標的領域の周期的位置データと、外部マーカの位置データとを相関付ける手段を有することを特徴とする請求項1記載の装置。
【請求項13】
前記治療は放射線治療であることを特徴とする請求項1記載の装置。
【請求項14】
前記治療は生検針治療であることを特徴とする請求項1記載の装置。
【請求項15】
前記治療はレーザビーム治療であることを特徴とする請求項1記載の装置。
【請求項16】
前記治療は、切除または超音波の1つを含む合焦形エネルギ治療であることを特徴とする請求項1記載の装置。
【請求項17】
前記外部マーカは、使用者のウエストの回りに着用される、1つ以上の外部マーカが取り付けられた装置を有し、該装置はベルト、リングおよびベストのうちの1つを有することを特徴とする請求項1記載の装置。
【請求項18】
前記標的領域の位置の変化に応答して治療を変更する手段を更に有することを特徴とする請求項1記載の装置。
【請求項19】
前記変更手段は、患者に対する治療を移動させる手段を有することを特徴とする請求項18記載の装置。
【請求項20】
前記変更手段は、治療の特性を変える手段を有することを特徴とする請求項18記載の装置。
【請求項21】
前記変更手段は治療ビームを照準させる手段を有することを特徴とする請求項20記載の装置。
【請求項22】
前記変更手段は所定時点で治療ビームを遮断する手段を有することを特徴とする請求項20記載の装置。
【請求項1】
患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置と、
第1検出装置が作動しないときに、患者の身体の外部移動を示す1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、
患者の移動を補償するために第1検出装置が作動しないときに、内部標的領域の位置と外部センサの位置との対応関係を創成し、治療すべき内部標的領域の位置を決定するプロセッサとを有し、前記位置は内部標的領域の所定位置に対応する外部マーカの発生位置に基いて決定される
ことを特徴とする治療中の患者の呼吸および他の移動を補償する装置。
【請求項2】
前記第1検出装置は、患者の体内の内部標的領域に取り付けられる1つ以上のマーカと、患者の体内のマーカを撮像する撮像装置とを有することを特徴とする請求項1記載の装置。
【請求項3】
前記撮像装置は定位X線装置を有することを特徴とする請求項2記載の装置。
【請求項4】
前記1つ以上のマーカは、内部標的領域に取り付けられる金属ビーズを有することを特徴とする請求項3記載の装置。
【請求項5】
前記第1検出装置は、治療前に内部標的領域を撮像する超音波装置を有することを特徴とする請求項1記載の装置。
【請求項6】
前記第1検出装置は更に、治療中の患者の移動を検出する撮像装置を有することを特徴とする請求項5記載の装置。
【請求項7】
前記撮像装置は定位X線装置を有することを特徴とする請求項6記載の装置。
【請求項8】
前記第2検出装置は、患者の身体に取り付けられる1つ以上の赤外線マーカと、該赤外線マーカを撮像する赤外線撮像装置とを有することを特徴とする請求項1記載の装置。
【請求項9】
前記第2検出装置は可視撮像装置を有することを特徴とする請求項1記載の装置。
【請求項10】
前記第2検出装置は、患者の呼吸を測定する流量計を有することを特徴とする請求項1記載の装置。
【請求項11】
前記第2検出装置は更に、患者の腹を押さえて呼吸運動を制限する手段を有することを特徴とする請求項10記載の装置。
【請求項12】
前記プロセッサは更に、内部標的領域の周期的位置データと、外部マーカの位置データとを相関付ける手段を有することを特徴とする請求項1記載の装置。
【請求項13】
前記治療は放射線治療であることを特徴とする請求項1記載の装置。
【請求項14】
前記治療は生検針治療であることを特徴とする請求項1記載の装置。
【請求項15】
前記治療はレーザビーム治療であることを特徴とする請求項1記載の装置。
【請求項16】
前記治療は、切除または超音波の1つを含む合焦形エネルギ治療であることを特徴とする請求項1記載の装置。
【請求項17】
前記外部マーカは、使用者のウエストの回りに着用される、1つ以上の外部マーカが取り付けられた装置を有し、該装置はベルト、リングおよびベストのうちの1つを有することを特徴とする請求項1記載の装置。
【請求項18】
前記標的領域の位置の変化に応答して治療を変更する手段を更に有することを特徴とする請求項1記載の装置。
【請求項19】
前記変更手段は、患者に対する治療を移動させる手段を有することを特徴とする請求項18記載の装置。
【請求項20】
前記変更手段は、治療の特性を変える手段を有することを特徴とする請求項18記載の装置。
【請求項21】
前記変更手段は治療ビームを照準させる手段を有することを特徴とする請求項20記載の装置。
【請求項22】
前記変更手段は所定時点で治療ビームを遮断する手段を有することを特徴とする請求項20記載の装置。
【図1】


【図2】

【図3】
【図4】
【図10】
【図11】

【図5】
【図6】
【図7A】
【図7B】
【図7C】

【図7D】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図2】
【図3】
【図4】
【図10】
【図11】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【公開番号】特開2009−297554(P2009−297554A)
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2009−225262(P2009−225262)
【出願日】平成21年9月29日(2009.9.29)
【分割の表示】特願2000−604773(P2000−604773)の分割
【原出願日】平成12年3月14日(2000.3.14)
【出願人】(501363143)アキュレイ インコーポレイテッド (2)
【Fターム(参考)】
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成21年9月29日(2009.9.29)
【分割の表示】特願2000−604773(P2000−604773)の分割
【原出願日】平成12年3月14日(2000.3.14)
【出願人】(501363143)アキュレイ インコーポレイテッド (2)
【Fターム(参考)】
[ Back to top ]