
治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法
【課題】治療用放射線の照射位置を駆動する駆動装置をより高精度に制御すること。
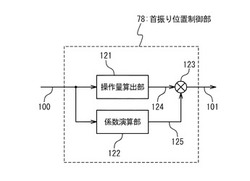
【解決手段】位置検出センサにより測定された位置センサ値を目標位置から減算した位置偏差100に基づいて補正前操作量124を算出する操作量算出部121と、位置偏差100の絶対値に関して単純に減少する係数125を算出する係数演算部122と、補正前操作量124に係数125を乗算して補正後操作量101を算出する乗算器123とを備えている。駆動装置は、補正後操作量101に基づいて、治療用放射線を出射する放射線照射装置が目標位置に配置されるように、制御される。位置偏差100が大きいときに補正後操作量101が大きくなり過ぎないために、放射線照射装置をより安定して駆動することができ、さらに、補正前操作量124に基づいて駆動装置を制御する制御装置を改造することにより、より容易に生産することができる。
【解決手段】位置検出センサにより測定された位置センサ値を目標位置から減算した位置偏差100に基づいて補正前操作量124を算出する操作量算出部121と、位置偏差100の絶対値に関して単純に減少する係数125を算出する係数演算部122と、補正前操作量124に係数125を乗算して補正後操作量101を算出する乗算器123とを備えている。駆動装置は、補正後操作量101に基づいて、治療用放射線を出射する放射線照射装置が目標位置に配置されるように、制御される。位置偏差100が大きいときに補正後操作量101が大きくなり過ぎないために、放射線照射装置をより安定して駆動することができ、さらに、補正前操作量124に基づいて駆動装置を制御する制御装置を改造することにより、より容易に生産することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線照射装置動作制御装置および放射線照射装置動作制御方法に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療は、治療効果が高いことが望まれ、その放射線は、患部の細胞に照射される線量に比較して、正常な細胞に照射される線量がより小さいことが望まれている。このためには治療用放射線を正確に患部に照射する必要がある。その放射線治療を実行する放射線治療装置は、患者の透過画像を撮像するイメージャシステムと、その治療用放射線を出射する治療用放射線照射装置と、その治療用放射線照射装置を駆動する駆動装置とを備えている。その放射線治療装置は、その透過画像に基づいて患部の位置を算出し、その位置に治療用放射線が照射されるようにその駆動装置を用いてその治療用放射線照射装置を駆動する。
【0003】
治療効果が高い放射線治療として、動体追尾照射が知られている。その動体追尾照射を実行する放射線治療装置は、患者の透過画像を撮像するイメージャシステムと、その治療用放射線を出射する治療用放射線照射装置と、その治療用放射線照射装置を駆動する駆動装置とを備えている。その放射線治療装置は、その透過画像に基づいて患部の位置を算出し、その位置に治療用放射線が照射されるようにその駆動装置を用いてその治療用放射線照射装置を駆動する。その放射線治療装置は、このような動作を数十msごとに繰り返して実行する。このような動体追尾照射によれば、呼吸・心鼓動に例示される患者の運動とともに患部が移動する場合であっても、患部以外の正常な細胞に照射される治療用放射線の線量に比較して、患部の細胞に照射される治療用放射線の線量が大きく、治療効果が高い。放射線治療装置は、このような駆動装置をより高精度に制御することが望まれている。
【0004】
特開2004−65808号公報には、患者の体動に対して常に最適位置に照射できるようにする放射線治療装置が開示されている。その放射線治療装置は、電子線の発生源と、前記電子線の方向を変える偏向電磁石と、真空を保持しながら前記電子線を通過させる真空窓と、前記電子線を散乱させる散乱箔と、前記電子線をX線に変換するターゲットと、電子線とX線の線量分布を照射面において一様にする平坦化フィルタと、電子線とX線を絞り込むコリメータと、電子線とX線の線量を測定する線量計から構成される照射ヘッドと、前記照射ヘッドを保持するガントリーアームを含む放射線治療装置であって、前記電子線の発生源と前記偏向電磁石とを真空ロータリージョイントで結合し、前記ガントリーアーム回転軸と平行で仮想線源位置を通る軸を中心として前記照射ヘッドを首振り運動させる回転手段を備えてなる。
【0005】
特開2006−21046号公報には、放射線の照射治療中においても、リアルタイムに治療野の状態をモニタすることが可能な放射線治療装置が開示されている。その放射線治療装置は、O型ガントリと、前記O型ガントリに移動可能に設けられ、被検体の治療野へ治療用放射線を照射する放射線照射ヘッドと、前記O型ガントリに移動可能に設けられ、前記被検体の前記治療野に診断用X線を照射するX線源と、前記O型ガントリに移動可能に設けられ、前記被検体を透過した前記診断用X線の透過X線を検出して、診断画像データとして出力するセンサアレイとを具備し、前記センサアレイは、前記放射線照射ヘッドを挟んで対象な位置に設けられ、前記O型ガントリ上を前記放射線照射ヘッドの移動に連動して動き、前記X線源は、前記センサアレイの動きに連動して動く。
【0006】
【特許文献1】特開2004−65808号公報
【特許文献2】特開2006−21046号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の課題は、照射対象の運動に追従して放射線の照射位置を移動するための駆動装置を小型化する治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法を提供することにある。
本発明の他の課題は、照射対象の運動に追従して放射線の照射位置を移動するための駆動装置をより高精度に制御する治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法を提供することにある。
本発明のさらに他の課題は、既存の治療用放射線照射装置動作制御装置から本治療用放射線照射装置動作制御装置に改造することが容易であり、放射線の照射位置を移動するための駆動装置をより高精度に制御する治療用放射線照射装置動作制御装置を提供することにある。
本発明のさらに他の課題は、照射対象の運動に追従して放射線の照射位置を移動する既存の治療用放射線照射装置動作制御装置から本治療用放射線照射装置動作制御方法を実行する治療用放射線照射装置動作制御装置に改造することが容易である治療用放射線照射装置動作制御方法を提供することにある。
本発明のさらに他の課題は、照射対象の運動に追従して放射線の照射位置をより高精度に移動する放射線治療装置を提供することにある。
本発明のさらに他の課題は、照射対象の運動に追従して放射線の照射位置を移動する駆動装置をより高精度に制御する放射線治療装置を提供することにある。
本発明のさらに他の課題は、任意の方向からの照射に対して放射線の照射位置をより高精度に移動する放射線治療装置及び放射線照射ヘッド制御方法を提供することにある。
本発明のさらに他の課題は、任意の方向からの照射に対して放射線の照射位置を移動する駆動装置をより高精度に制御する放射線治療装置及び治療用放射線照射装置制御方法を提供することにある。
【課題を解決するための手段】
【0008】
以下に、発明を実施するための最良の形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための最良の形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による治療用放射線照射装置動作制御装置(5)は、治療用放射線(23)を出射する放射線照射装置(16)をフレーム(46)に対して駆動する駆動装置(67、68)を備えている放射線治療装置(3)において、目標位置(91、94、96)と放射線照射装置(16)の位置との位置偏差(100)を、目標位置(91、94、96)と位置検出センサ(51、61)により測定された位置センサ値(97、99)とに基づいて算出する演算器(77)と、位置偏差(100)に基づいて係数(125)を算出する係数演算部(122)と、補正前操作量(124)に係数(125)を乗算して補正後操作量(101)を算出する乗算器(123)とを備えている。係数(125)は、位置偏差(100)の絶対値に関して単純に減少する。駆動装置(67、68)は、補正後操作量(101)に基づいて、フレーム(46)に対して放射線照射装置(16)が目標位置(91、94、96)に配置されるように、制御される。
【0010】
目標位置(91、94、96)は、治療用放射線(23)の照射位置が照射対象(43)の位置に合致するように、かつ、治療用放射線(23)が照射対象(43)に追従するように、算出される。
【0011】
本発明による治療用放射線照射装置動作制御装置(5)は、位置偏差(100)に基づいて補正前操作量(124)を算出する操作量算出部(121)をさらに備えている。
【0012】
本発明による治療用放射線照射装置動作制御装置(5)は、本治療用放射線照射装置動作制御装置(5)により駆動装置(67、68)が制御されるときに駆動装置(67、68)に供給される電気信号を生成する装置(83、84)の温度に基づいて温度ドリフト量(104)を算出する温度ドリフト補正部(81)をさらに備えている。駆動装置(67、68)は、温度ドリフト量(104)にさらに基づいて制御される。
【0013】
放射線治療装置(3)は、異なる2軸以上の軸(21、22)に対して放射線照射装置(16)が移動可能な機構を有しており、駆動装置(67、68)は、軸(21、22)の各軸の移動を各々独立に制御を行う。
【0014】
当該移動動作は、軸(21、22)を中心とした放射線照射装置(16)の回転動作である。
【0015】
位置検出センサ(51、61)の少なくとも一つは、フレーム(46)または放射線照射装置(16)の一方に固定されるセンサ本体(62)と、フレーム(46)または放射線照射装置(16)の他方に固定されるスケール部分(64)とを備えている。スケール部分(64)は、その軸の1つを中心とする円弧に沿って配置されるスケール(65)が形成されている。センサ本体(62)は、スケール(65)を観測することにより、フレーム(46)に対する放射線照射装置(16)の位置を測定する。
【0016】
放射線治療装置(3)は、フレーム(46)を移動可能に支持する他のフレーム(45)をさらに備えている。位置検出センサ(51、61)は、フレーム(46)または他のフレーム(45)の一方に固定される他のセンサ本体(52)と、フレーム(46)または他のフレーム(45)の他方に固定される他のスケール部分(54)とを備えている。他のスケール部分(54)は、その軸の他の1つを中心とする円弧に沿って配置される他のスケール(55)が形成されている。他のセンサ本体(52)は、他のスケール(55)を観測することにより、他のフレーム(45)に対するフレーム(46)の位置を測定する。
【0017】
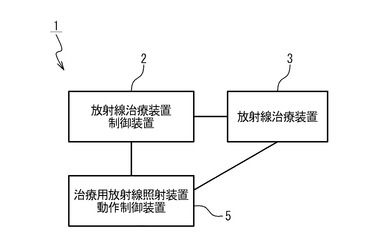
本発明による放射線治療システム(1)は、本発明による治療用放射線照射装置動作制御装置(5)と、放射線治療装置(3)と、当該放射線治療装置(3)を制御する放射線治療装置制御装置(2)とを備えている。
【0018】
本発明による治療用放射線照射装置動作制御方法は、治療用放射線(23)を出射する放射線照射装置(16)をフレーム(46)に対して駆動する駆動装置(67、68)を備えている放射線治療装置(3)を制御する。本発明による治療用放射線照射装置動作制御方法は、目標位置(91、94、96)と放射線照射装置(16)の位置との位置偏差(100)を、目標位置(91、94、96)と位置検出センサ(51、61)により測定された位置センサ値(97、99)とに基づいて位置偏差(100)を算出するステップと、位置偏差(100)に基づいて係数(125)を算出するステップと、補正前操作量(124)に係数(125)を乗算して補正後操作量(101)を算出するステップとを備えている。係数(125)は、位置偏差(100)の絶対値に関して単純に減少する。駆動装置(67、68)は、補正後操作量(101)に基づいて、フレーム(46)に対して放射線照射装置(16)が目標位置(91、94、96)に配置されるように、制御される。
【0019】
目標位置(91、94、96)は、治療用放射線(23)の照射位置が照射対象(43)の位置に合致するように、かつ、治療用放射線(23)が照射対象(43)に追従するように、算出される。
【0020】
本発明による治療用放射線照射装置動作制御方法は、位置偏差(100)に基づいて補正前操作量(124)を算出するステップをさらに備えている。
【0021】
本発明による治療用放射線照射装置動作制御方法は、本治療用放射線照射装置動作制御方法により駆動装置(67、68)が制御されるときに駆動装置(67、68)に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量(104)を算出するステップをさらに備えている。駆動装置(67、68)は、温度ドリフト量(104)にさらに基づいて制御される。
【0022】
放射線治療装置(3)は、異なる2軸以上の軸に対して放射線照射装置(16)が移動可能な機構を有しており、駆動装置(67、68)は、その軸の各軸の移動を各々独立に制御される。
【0023】
当該移動動作は、当該軸を中心とした放射線照射装置(16)の回転動作である。
【0024】
位置検出センサ(51、61)の少なくとも一つは、フレーム(46)または放射線照射装置(16)の一方に固定されるセンサ本体(62)と、フレーム(46)または放射線照射装置(16)の他方に固定されるスケール部分(64)とを備えている。スケール部分(64)は、その軸の1つを中心とする円弧に沿って配置されるスケール(65)が形成されている。センサ本体(62)は、スケール(65)を観測することにより、フレーム(46)に対する放射線照射装置(16)の位置を測定する。
【0025】
放射線治療装置(3)は、フレーム(46)を移動可能に支持する他のフレーム(45)をさらに備えている。位置検出センサ(51、61)は、フレーム(46)または他のフレーム(45)の一方に固定される他のセンサ本体(52)と、フレーム(46)または他のフレーム(45)の他方に固定される他のスケール部分(54)とを備えている。他のスケール部分(54)は、その軸の他の1つを中心とする円弧に沿って配置される他のスケール(55)が形成されている。他のセンサ本体(52)は、他のスケール(55)を観測することにより、他のフレーム(45)に対するフレーム(46)の位置を測定する。
【0026】
本発明による放射線治療装置(3)は、治療用放射線(23)を出射する放射線照射装置(16)をフレーム(46)に対して回転させる駆動装置(68)と、フレーム(46)に対して放射線照射装置(16)が配置される角度位置センサ値(97、99)を測定する位置検出センサ(61)と、その角度位置センサ値(97、99)に基づいて駆動装置(68)を制御する治療用放射線照射装置動作制御装置(5)とを備えている。その位置検出センサ(61)は、フレーム(46)または放射線照射装置(16)の一方に固定されるセンサ本体(62)と、フレーム(46)または放射線照射装置(16)の他方に固定されるスケール部分(64)とを備えている。スケール部分(64)は、その回転軸を軸とする円柱の側面に沿って配置されるスケール(65)が形成されている。センサ本体(62)は、スケール(65)を観測することにより、フレーム(46)に対する放射線照射装置(16)の位置を測定する。
【0027】
本発明による放射線治療装置(3)は、フレーム(46)を移動可能に支持するフレーム(45)と、位置検出センサ(51)とをさらに備えている。位置検出センサ(51)は、フレーム(46)またはフレーム(45)の一方に固定されるセンサ本体(52)と、フレーム(46)またはフレーム(45)の他方に固定されるスケール部分(54)とを備えている。スケール部分(54)は、その軸の1つを中心とする円弧に沿って配置されるスケール(55)が形成されている。センサ本体(52)は、スケール(55)を観測することにより、フレーム(45)に対するフレーム(46)の位置を示す角度位置センサ値を出力する。治療用放射線照射装置動作制御装置(5)は、センサ本体(52)により出力される角度位置センサ値にさらに基づいて駆動装置(67)を制御する。
【発明の効果】
【0028】
本発明による治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法によれば、その位置偏差が大きい場合でも放射線照射装置を安定して移動させることができ、駆動装置をより高精度に制御することができる。本発明による治療用放射線照射装置動作制御装置は、さらに、駆動装置が操作量に基づいて制御される既存の治療用放射線照射装置動作制御装置を改造することにより、より容易に生産することができる。本発明による放射線治療装置は、放射線照射装置のフレームに対する角度をより高精度に測定することができ、放射線照射装置をより高精度に駆動することができ、特に、被検体の運動に追従して治療用放射線の照射位置をより高精度に駆動することができる。
【発明を実施するための最良の形態】
【0029】
図面を参照して、本発明による治療用放射線照射装置動作制御装置の実施の形態を記載する。その治療用放射線照射装置動作制御装置5は、図1に示されているように、放射線治療システム1に適用されている。放射線治療システム1は、放射線治療装置制御装置2と放射線治療装置3と治療用放射線照射装置動作制御装置5とを備えている。放射線治療装置制御装置2と治療用放射線照射装置動作制御装置5とは、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置2と放射線治療装置3と治療用放射線照射装置動作制御装置5とは、双方向に情報を伝送することができるように、互いに接続されている。
【0030】
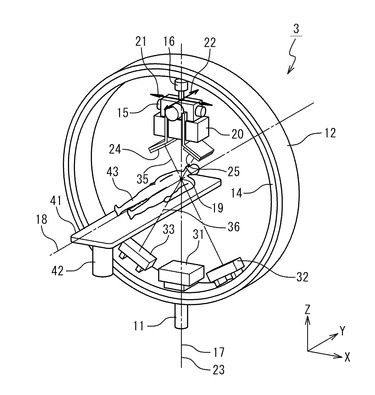
図2は、放射線治療装置3を示している。放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、放射線治療装置制御装置2により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。Oリング12は、回転軸18を中心とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、放射線治療装置制御装置2により制御されて回転軸18を中心に走行ガントリ14を回転させる。
【0031】
首振り機構15は、走行ガントリ14のリングの内側に固定され、治療用放射線照射装置16が走行ガントリ14の内側に配置されるように、治療用放射線照射装置16を走行ガントリ14に支持している。首振り機構15は、チルト軸21およびパン軸22を有している。パン軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。チルト軸21は、パン軸22に直交している。首振り機構15は、放射線治療装置制御装置2により制御されて、パン軸22を中心に治療用放射線照射装置16を回転させ、チルト軸21を中心に治療用放射線照射装置16を回転させる。
【0032】
治療用放射線照射装置16は、放射線治療装置制御装置2により制御されて、治療用放射線23を放射する。治療用放射線23は、パン軸22とチルト軸21とが交差する交点を通る直線に概ね沿って放射される。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、MLC(マルチリーフコリメータ)20を備えている。そのMLC20は、放射線治療装置制御装置2により制御され、治療用放射線23の一部を遮蔽することにより、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0033】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、首振り機構15で治療用放射線照射装置16がアイソセンタ19に向かうように一旦調整されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0034】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、診断用X線源24、25とセンサアレイ32、33とを備えている。診断用X線源24は、走行ガントリ14に支持されている。診断用X線源24は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源24は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線35を放射する。診断用X線35は、診断用X線源24が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。診断用X線源25は、走行ガントリ14に支持されている。診断用X線源25は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源25は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線36を放射する。診断用X線36は、診断用X線源25が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。
【0035】
センサアレイ32は、走行ガントリ14に支持されている。センサアレイ32は、診断用X線源24により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線35を受光して、その被写体の透過画像を生成する。センサアレイ33は、走行ガントリ14に支持されている。センサアレイ33は、診断用X線源25により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線36を受光して、その被写体の透過画像を生成する。センサアレイ32、33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0036】
このようなイメージャシステムによれば、センサアレイ32、33により得た画像信号に基づき、アイソセンタ19を中心とする透過画像を生成することができる。
【0037】
放射線治療装置3は、さらに、センサアレイ31を備えている。センサアレイ31は、センサアレイ31と治療用放射線照射装置16とを結ぶ線分がアイソセンタ19を通るように配置されて、走行ガントリ14のリングの内側に固定されている。センサアレイ31は、治療用放射線照射装置16により放射されてアイソセンタ19の周辺の被写体を透過した治療用放射線23を受光して、その被写体の透過画像を生成する。センサアレイ31としては、FPD、X線IIが例示される。
【0038】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、放射線治療システム1により治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ41に固定する。カウチ駆動装置42は、カウチ41を土台に支持し、放射線治療装置制御装置2により制御されてカウチ41を移動させる。
【0039】
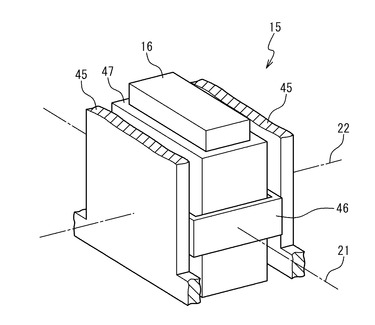
図3は、首振り機構15を示している。首振り機構15は、ガントリ走行フレーム45とパンフレーム46とチルトフレーム47とを備えている。ガントリ走行フレーム45は、走行ガントリ14に固定され、走行ガントリ14と同体に運動する。パンフレーム46は、パン軸22を中心に回転可能にガントリ走行フレーム45に支持されている。パン軸22は、ガントリ走行フレーム45に対して固定されている。ガントリ走行フレーム45は、図示されていないストッパを備えている。パンフレーム46は、パン軸22を中心に回転するときに、そのストッパに接触して、回転することができる範囲が制限されている。チルトフレーム47は、チルト軸21を中心に回転可能にパンフレーム46に支持されている。チルト軸21は、パンフレーム46に対して固定されている。チルトフレーム47は、さらに、チルト軸21を中心に回転するときに、パンフレーム46の一部に接触して、回転することができる範囲が制限されている。治療用放射線照射装置16は、チルトフレーム47に固定されている。なお、首振り機構15は、アイソセンタ19または図示されていない患部に治療用放射線23が向かうように調整するために用いることから、パン軸22とチルト軸21は、治療用放射線23が放射される仮想的点線源に両軸の交点がほぼ一致するように、配置されることが望ましい。
【0040】
首振り機構15は、さらに、図3に図示されていないパン軸駆動装置とチルト軸駆動装置とを備えている。そのパン軸駆動装置は、放射線治療装置制御装置2により制御されて、ガントリ走行フレーム45に対してパン軸22を中心にパンフレーム46を回転させる。そのチルト軸駆動装置は、放射線治療装置制御装置2により制御されて、パンフレーム46に対してチルト軸21を中心にチルトフレーム47を回転させる。
【0041】
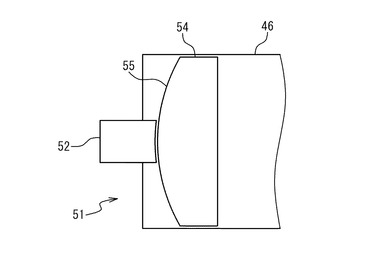
放射線治療装置3は、さらに、首振り位置検出装置を備えている。その首振り位置検出装置は、図4に示されているように、パン角センサ51を備えている。パン角センサ51は、いわゆるリニアスケールから形成され、パン角センサ本体52とパン角スケール部分54とを備えている。パン角スケール部分54は、パンフレーム46に固定され、パンフレーム46と同体に運動する。パン角スケール部分54は、パン軸22を中心とする円弧に形成される部分を有している。パン角スケール部分54は、パン角スケール55を備えている。パン角スケール55は、複数の磁石から形成される目盛りから形成され、パン角スケール部分54のその円弧に沿って配置されている。パン角センサ本体52は、パン角スケール部分54のパン角スケール55に近接するように配置され、走行ガントリ14と同体に運動するように走行ガントリ14に固定されている。パン角センサ本体52は、磁界の変化を検出することにより、走行ガントリ14に対するパンフレーム46の角度(パン角)を測定し、そのパン角を治療用放射線照射装置動作制御装置5に出力する。
【0042】
ロータリーエンコーダは、一般に、リニアスケールと同様にして、スケールを観測することにより回転角度を測定する。パン角センサ51は、このようなロータリーエンコーダに比較して、スケールを回転軸からより遠い位置にも配置することができると共に角度を高精度に測定することができる。当該設置可能距離は必要測定精度、リニアスケール分解能及びアイソセンタ19とパン軸22との距離により決まり、たとえば、パン軸22から190mmが例示される。更にロータリーエンコーダは回転体そのものの回転を測定するのに対して、リニアスケールを用いる手法では回転物そのものの回転を評価することができるためより高精度に測定が可能になる。更にリニアスケールはロータリーエンコーダよりも耐放射線性が高いため、放射線治療装置内で使用するには適している。なお、測定系の信頼を高めるために、複数のリニアスケールまたはロータリーエンコーダとリニアスケールを併用することも有効である。パン角センサ51は、磁気方式が採用され、このとき、放射線による誤動作が少なく、好ましい。なお、パン角センサ51は、磁気方式と異なる他の方式が適用された他のリニアスケールに置換されることができる。その方式としては、光電方式、レーザ式が例示される。その光電方式は、スリット円板に光を当て、そのスリットを通過した光パルスの信号に基づいて位置検出する方式である。そのレーザ式は、回折格子であるホログラムスケールにレーザを照射し、光の回折と干渉を利用して位置検出する方式である。このようなリニアスケールも、パン角センサ51と同様にして、角度をより高精度に測定することができる。
【0043】
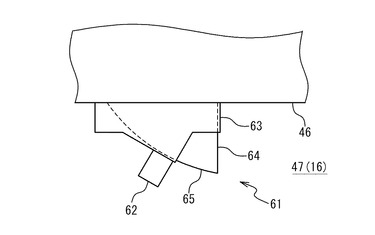
その首振り位置検出装置は、さらに、図5に示されているように、チルト角センサ61を備えている。チルト角センサ61は、いわゆるリニアスケールから形成され、チルト角センサ本体62と支持部分63とチルト角スケール部分64とを備えている。チルト角センサ本体62は、パンフレーム46に固定されている。チルト角スケール部分64は、チルトフレーム47に固定され、治療用放射線照射装置16と同体に運動する。チルト角スケール部分64は、チルト軸21を中心とする円弧に形成される部分を有している。チルト角スケール65は、複数の磁石から形成される目盛りから形成され、チルト角スケール部分64のその円弧に沿って配置されている。支持部分63は、パンフレーム46に固定され、チルト角センサ本体62に固定される。すなわち、チルト角センサ本体62がパンフレーム46と同体に運動するように、パンフレーム46にチルト角センサ本体62を支持している。チルト角センサ本体62は、チルト角スケール部分64のチルト角スケール65に近接するように配置され、磁界の変化を検出することにより、パンフレーム46に対するチルトフレーム47の角度(チルト角)を測定し、そのチルト角を治療用放射線照射装置動作制御装置5に出力する。
【0044】
チルト角センサ61は、ロータリーエンコーダに比較して、スケールを回転軸からより遠い位置に配置することができ、角度をより高精度に測定することができる。当該設置可能距離は必要測定精度、リニアスケール分解能及びアイソセンタ19とチルト軸21との距離により決まり、たとえば、チルト軸21から260mmが例示される。更にロータリーエンコーダは回転体そのものの回転を測定するのに対して、リニアスケールを用いる手法では回転物そのものの回転を評価することができるためより高精度に測定が可能になる。更にリニアスケールはロータリーエンコーダよりも耐放射線性が高いため、放射線治療装置内で使用するには適している。なお、測定系の信頼を高めるために、複数のリニアスケールまたはロータリーエンコーダとリニアスケールを併用することも有効である。チルト角センサ61は、磁気方式が採用され、このとき、放射線による誤動作が少なく、好ましい。なお、チルト角センサ61は、磁気方式と異なる他の方式が適用された他のリニアスケールに置換されることができる。このようなリニアスケールも、チルト角センサ61と同様にして、角度をより高精度に測定することができる。
【0045】
なお、パン角センサ51及びチルト角センサ61の各構成要素の配置は、本事例に限定されるものではなく、固定要素に対する可動要素の相対的角度を評価可能であるように配置されればよい。例えば、パン角センサ51において、パン角センサ本体52はパンフレーム46に固定され、また、パン角スケール部分54はガントリ走行フレーム45に固定されることでも同様に機能する。
【0046】
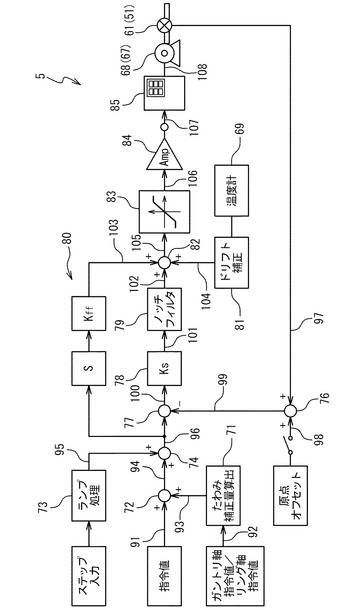
図6は、治療用放射線照射装置動作制御装置5を示している。治療用放射線照射装置動作制御装置5は、たわみ補正量算出部71と加算器72とランプ処理部73と加算器74と加算器76と加算器77と首振り位置制御部78とノッチフィルタ79とフィードフォワード部80と温度ドリフト補正部81と加算器82とを備えている。
【0047】
たわみ補正量算出部71は、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値とから形成される複数の組を複数のチルト角たわみ補正量に対応付けているテーブルを記憶装置に記録している。ここでOリング軸指令値とは、回転軸17を中心にOリング12を回転させるための指令値である。通常当該指令値は、事前に策定した治療計画に基づき自動的または半自動的に設定されうる。またガントリ軸指令値とは、回転軸18を中心に走行ガントリ14を回転ための指令値である。通常当該指令値は、事前に策定した治療計画に基づき設定される。またチルト角たわみ補正量は、別途事前に測定した値である。たわみ補正量算出部71は、そのテーブルを参照して、その複数のチルト角たわみ補正量のうちから、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値との組92に対応するチルト角たわみ補正量93を算出する。
【0048】
加算器72は、放射線治療装置制御装置2により算出されるチルト角指令値91にチルト角たわみ補正量93を加算して、チルト角補正後指令値94を算出する。ランプ処理部73は、チルト角補正後指令値94とチルト角補正後指令値94が入力されるタイミングとに基づいてチルト角ランプ処理補正量95を算出する。加算器74は、チルト角補正後指令値94にチルト角ランプ処理補正量95と加算して、チルト角目標位置値96を算出する。治療用放射線23がアイソセンタ19に向かうように調整するために首振り機構15を用いる場合には、チルト角指令値91は0を示すこととなる。
【0049】
加算器76は、チルト角センサ61により測定されるチルト角位置センサ値97にチルト角原点オフセット値98を加算して、チルト角位置実績値99を算出する。加算器77は、チルト角目標位置値96からチルト角位置実績値99を減算してチルト角位置偏差100を算出する。首振り位置制御部78は、チルト角位置偏差100に基づいてチルト角操作量101を算出する。ノッチフィルタ79は、チルト軸駆動装置の固有周波数の周波数成分をチルト角操作量101のうちから減衰させてチルト角補正後操作量102を算出する。
【0050】
フィードフォワード部80は、チルト角目標位置値96に基づいてチルト角フィードフォワード操作量103を算出する。温度ドリフト補正部81は、チルト角温度ドリフト補正量104を算出する。加算器82は、チルト角補正後操作量102にチルト角フィードフォワード操作量103とチルト角温度ドリフト補正量104とを加算してチルト角操作量105を算出する。
【0051】
放射線治療装置3は、さらに、D/A変換回路83とアンプ84とドライバ85と温度計69とを備えている。D/A変換回路83は、治療用放射線照射装置動作制御装置5により算出されたチルト角操作量105に対応する電圧のチルト角制御電気信号106を生成する。アンプ84は、チルト角制御電気信号106の電圧を増幅したチルト角制御電気信号107を出力する。D/A変換回路83とアンプ84とは、配電盤に配置されている。温度計69は、その配電盤の温度を測定する。温度ドリフト補正部81は、温度計69により測定された温度に基づいてチルト角温度ドリフト補正量104を算出する。ドライバ85は、チルト角制御電気信号107に対応する電流がチルト軸駆動装置68に流れるように、チルト軸駆動装置68にチルト軸駆動電気信号108を供給する。チルト軸駆動装置68は、チルト軸駆動電気信号108が供給されることにより、パンフレーム46に対してチルト軸21を中心にチルトフレーム47を回転させる。
【0052】
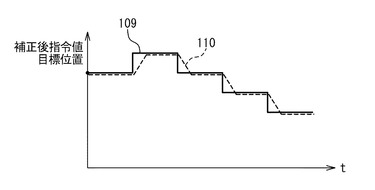
図7は、チルト角補正後指令値94の変化の一例を示している。その変化109は、チルト角補正後指令値94が急激に増減する期間とチルト角補正後指令値94がほとんど増減しない期間とが交互に周期的に出現するように変化することを示している。その周期は、患者43の周期的な運動(呼吸、心拍動)に比較して十分に小さく、数十msが例示される。図7は、さらに、チルト角目標位置値96の変化を示している。その変化110は、チルト角目標位置値96が増減する期間とチルト角目標位置値96がほとんど増減しない期間とが交互に出現するように変化することを示している。変化109と変化110とは、チルト角目標位置値96がほとんど増減しない期間で、チルト角目標位置値96がチルト角補正後指令値94に概ね一致していることを示している。変化109と変化110とは、チルト角目標位置値96が増減する傾きの絶対値が、チルト角補正後指令値94が増減する傾きの絶対値より小さいことを示している。すなわち、ランプ処理部73は、チルト角ランプ処理補正量95がチルト角目標位置値96からチルト角補正後指令値94を減算した値になるように、チルト角ランプ処理補正量95を算出する。
【0053】
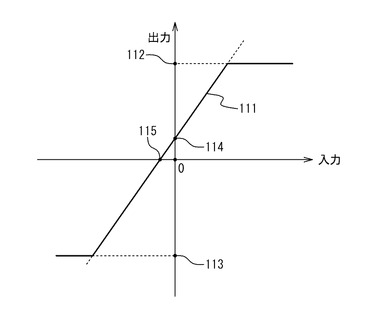
図8は、D/A変換回路83とアンプ84とから形成される配電盤の入力と出力の関係を示している。その関係111は、その入力に関してその出力が単純に増加していることを示し、その出力がその入力に概ね比例していることを示している。関係111は、さらに、その出力が最大値112を有していることを示し、その出力が最小値113を有していることを示している。関係111は、さらに、その入力が0を示すときにその出力が0と異なる値114を示すことを示し、その出力が0を示すときにその入力が0と異なる値115を示すことを示している。値114と値115とは、その配電盤の温度により変化する。
【0054】
このとき、温度ドリフト補正部81は、配電盤の温度に基づいて値115がどのように変化するかを記憶装置に記録し、温度計69により測定された配電盤の温度に基づいて、チルト角補正後操作量102とチルト角フィードフォワード操作量103との和が0と示すときに、チルト角制御電気信号106の電圧が0Vを示すように、チルト角温度ドリフト補正量104を算出する。すなわち、チルト角温度ドリフト補正量104は、温度計69により測定された配電盤の温度に対応する値115に−1を乗算した値を示している。このような制御によれば、治療用放射線照射装置動作制御装置5は、チルト角補正後操作量102とチルト角フィードフォワード操作量103との和が0を示すときに、または指定したある値以下の値を示すときに、すなわち、チルト軸駆動装置68を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0055】
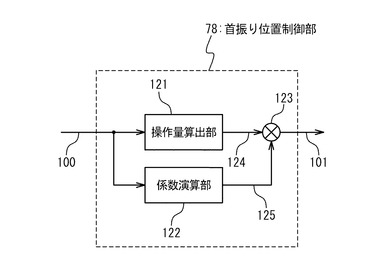
図9は、首振り位置制御部78を示している。首振り位置制御部78は、操作量算出部121と係数演算部122と乗算器123とを備えている。操作量算出部121は、チルト角位置偏差100に基づいて補正前チルト角操作量124を算出する。このような算出は、周知のものが適用される。係数演算部122は、チルト角位置偏差100に基づいてチルト角係数125を算出する。乗算器123は、補正前チルト角操作量124にチルト角係数125を乗算して、首振り位置制御部78の出力であるチルト角操作量101を算出する。
【0056】
このような首振り位置制御部78は、既存の操作量算出部121に係数演算部122と乗算器123とを追加することにより、容易に製造することができる。このため、治療用放射線照射装置動作制御装置5は、既存の治療用放射線照射装置動作制御装置を改造することにより、より容易に製造することができる。
【0057】
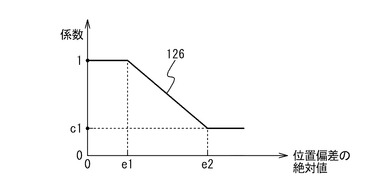
図10は、チルト角位置偏差100とチルト角係数125との関係を示している。その関係126は、チルト角位置偏差100の絶対値に関して、チルト角係数125が単純に減少していることを示している。関係126は、さらに、チルト角位置偏差100の絶対値が値e1以下であるときに、チルト角係数125が1を示すことを示している。関係126は、さらに、チルト角位置偏差100の絶対値が値e1以上であり、かつ、値e2以下であるときに、チルト角係数125が、チルト角位置偏差100の増加と共に、減少していることを示している。関係126は、さらに、チルト角位置偏差100の絶対値が値e2以上であるときに、チルト角係数125が値c1を示すことを示している。値c1は、チルト軸駆動装置68により生成される駆動力が、パンフレーム46に対してチルトフレーム47が回転する静止摩擦より大きくなるように、設定される。
【0058】
このようなチルト角係数125によれば、チルト角位置偏差100が大きいときに、チルト角操作量101が大きくなり過ぎない。このため、治療用放射線照射装置動作制御装置5は、チルト角位置偏差100が大きいときに、チルト軸駆動装置68を用いてパンフレーム46に対してチルトフレーム47をより安定して駆動することができる。このため、治療用放射線照射装置動作制御装置5は、チルト軸駆動装置68が補正前チルト角操作量124に基づいて制御される既存の治療用放射線照射装置動作制御装置に比較して、チルト角位置偏差100が大きいときに、チルト角操作量101を小さくすることができ、チルト軸駆動装置68を用いてチルトフレーム47を安定して回転させることができ、チルト軸駆動装置68をより高精度に制御することができる。
【0059】
治療用放射線照射装置動作制御装置5は、パンフレーム46に対してチルト軸21を中心にチルトフレーム47を回転させる制御と同様にして、ガントリ走行フレーム45に対してパン軸22を中心にパンフレーム46を回転させる。すなわち、たわみ補正量算出部71は、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値とから形成される複数の組を複数のパン角たわみ補正量に対応付けているテーブルを記憶装置に記録している。たわみ補正量算出部71は、そのテーブルを参照して、その複数のパン角たわみ補正量のうちから、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値との組92に対応するパン角たわみ補正量93を算出する。
【0060】
加算器72は、放射線治療装置制御装置2により算出されるパン角指令値91にパン角たわみ補正量93を加算して、パン角補正後指令値94を算出する。ランプ処理部73は、パン角補正後指令値94とパン角補正後指令値94が入力されるタイミングとに基づいてパン角ランプ処理補正量95を算出する。加算器74は、パン角補正後指令値94にパン角ランプ処理補正量95と加算して、パン角目標位置値96を算出する。
【0061】
加算器76は、パン角センサ51により測定されるパン角位置センサ値97にパン角原点オフセット値98を加算して、パン角位置実績値99を算出する。加算器77は、パン角目標位置値96からパン角位置実績値99を減算してパン角位置偏差100を算出する。操作量算出部121は、パン角位置偏差100に基づいて補正前パン角操作量124を算出する。係数演算部122は、パン角位置偏差100に基づいてパン角係数125を算出する。乗算器123は、補正前パン角操作量124にパン角係数125を乗算して、首振り位置制御部78の出力であるパン角操作量101を算出する。ノッチフィルタ79は、パン軸駆動装置の固有周波数の周波数成分をパン角操作量101のうちから減衰させてパン角補正後操作量102を算出する。
【0062】
フィードフォワード部80は、パン角目標位置値96に基づいてパン角フィードフォワード操作量103を算出する。加算器82は、パン角補正後操作量102にパン角フィードフォワード操作量103と温度ドリフト補正部81により算出されるパン角温度ドリフト補正量104とを加算してパン角操作量105を算出する。
【0063】
放射線治療装置3は、さらに、D/A変換回路83とアンプ84とドライバ85とを備えている。D/A変換回路83は、治療用放射線照射装置動作制御装置5により算出されたパン角操作量105に対応する電圧のパン角制御電気信号106を生成する。アンプ84は、パン角制御電気信号106の電圧を増幅したパン角制御電気信号107を出力する。ドライバ85は、パン角制御電気信号107に対応する電流がパン軸駆動装置67に流れるように、パン軸駆動装置67にパン軸駆動電気信号108を供給する。パン軸駆動装置67は、パン軸駆動電気信号108が供給されることにより、ガントリ走行フレーム45に対してパン軸22を中心にパンフレーム46を回転させる。
【0064】
パン角補正後指令値94とパン角目標位置値96とは、それぞれ、チルト角補正後指令値94とチルト角目標位置値96と同様にして変化する。すなわち、パン角補正後指令値94とパン角目標位置値96とは、それぞれ、増減する期間とほとんど増減しない期間とが交互に出現するように変化し、パン角目標位置値96が増減する傾きの絶対値がパン角補正後指令値94が増減する傾きの絶対値より小さい。すなわち、ランプ処理部73は、パン角ランプ処理補正量95がパン角目標位置値96からパン角補正後指令値94を減算した値になるように、パン角ランプ処理補正量95を算出する。
【0065】
パン角位置偏差100とパン角係数125とは、それぞれ、チルト角位置偏差100とチルト角係数125と同様にして変化する。すなわち、パン角係数125は、パン角位置偏差100の絶対値が値e1以下であるときに1を示し、パン角位置偏差100の絶対値が値e1以上であり、かつ、値e2以下であるときに減少し、パン角位置偏差100の絶対値が値e2以上であるときに、値c1を示している。値c1は、パン軸駆動装置67により生成される駆動力が、ガントリ走行フレーム45に対してパンフレーム46が回転する静止摩擦より大きくなるように、設定される。
【0066】
このようなパン角係数125によれば、パン角位置偏差100が大きいときに、パン角操作量101が大きくなり過ぎない。このため、治療用放射線照射装置動作制御装置5は、パン角位置偏差100が大きいときに、パン軸駆動装置67を用いてパンフレーム46に対して治療用放射線照射装置16をより安定して駆動することができる。このため、治療用放射線照射装置動作制御装置5は、パン軸駆動装置67が補正前パン角操作量124に基づいて制御される既存の治療用放射線照射装置動作制御装置に比較して、パン角位置偏差100が大きいときに、パン角操作量101を小さくすることができ、パン軸駆動装置67を用いてパンフレーム46を安定して回転させることができ、パン軸駆動装置67をより高精度に制御することができる。
【0067】
さらに、温度ドリフト補正部81は、パン角補正後操作量102とパン角フィードフォワード操作量103との和が0と示すときに、パン角制御電気信号106の電圧が0Vを示すように、パン角温度ドリフト補正量104を算出する。このような制御によれば、治療用放射線照射装置動作制御装置5は、パン角補正後操作量102とパン角フィードフォワード操作量103との和が0を示すときに、または指定したある値以下の値を示すときに、すなわち、パン軸駆動装置67を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0068】
放射線治療装置制御装置2により実行される動作は、治療計画を作成する動作と、放射線治療する動作とを備えている。
【0069】
その治療計画を作成する動作では、まず、ユーザは、その患者の患部とその患部の周辺の部位との3次元データに基づいて、その患者の患部とその患部の周辺の臓器とを示す画像を生成する。ユーザは、放射線治療装置制御装置2を用いてその画像を閲覧し、その患部の位置を特定する。ユーザは、さらに、その画像に基づいて治療計画を作成し、その治療計画を放射線治療装置制御装置2に入力する。その治療計画は、その患者の患部に治療用放射線を照射する照射角度と、その各照射角度から照射する治療用放射線の線量および性状とを示している。
【0070】
その放射線治療する動作では、ユーザは、まず、その3次元データを採取したときと同様の姿勢に放射線治療装置3のカウチ41にその患者を固定する。ユーザは、患者の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。ユーザは、その透過画像の撮像とカウチ41の移動とを繰り返して、患者の患部がアイソセンタ19に正確に重なるように患者の患部を配置する。
【0071】
放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、放射線治療装置3のイメージャシステムを用いてその患者の患部の透過画像を撮像する。放射線治療装置制御装置2は、その治療計画の照射角度で患者43の患部に治療用放射線23が照射されるように、その透過画像に基づいてOリング軸指令値とガントリ軸指令値とを算出し、Oリング12を駆動し、走行ガントリ14を駆動する。なお、構造物であるOリング12及び走行ガントリは、当該駆動した条件に応じて搭載物を含めた自重に基づく変形を生じる。このため本変形量によっては、首振り機構15で治療用放射線照射装置16がまずはアイソセンタ19に向かうように調整されることが望ましい。放射線治療装置制御装置2は、その透過画像の撮像とOリング12と走行ガントリ14との駆動とを繰り返して、その治療計画の照射角度で患者43の患部に治療用放射線23が照射されるように、治療用放射線照射装置16を正確に配置する。
【0072】
患者43の患部が呼吸・心鼓動に例示される患者の運動とともに患部が移動する場合には、放射線治療装置制御装置2は、治療用放射線照射装置16による治療用放射線の照射位置が患者43の患部の位置に合うように、追尾動作と照射動作とを繰り返して実行する。
【0073】
その追尾動作では、放射線治療装置制御装置2は、放射線治療装置3のイメージャシステムにより撮像された画像に基づいて患部位置を算出する。その患部位置に基づき、チルト角指令値91とパン角指令値91とが算出される。このような患部位置の算出は、たとえば、30msごとに周期的に実行される。
【0074】
その追尾動作では、治療用放射線照射装置動作制御装置5は、チルト角位置センサ値97をチルト角センサ61から収集し、チルト角位置センサ値97とチルト角指令値91とに基づいてチルト角操作量105を算出する。チルトフレーム47は、パンフレーム46に対するチルト角がチルト角指令値91を示すように、チルト軸駆動装置68によりチルト角操作量105に基づいて駆動される。このような動作は、放射線治療装置制御装置2による患部位置の算出に比較して十分に短く、たとえば、5msごとに周期的に実行される。
【0075】
治療用放射線照射装置動作制御装置5は、チルト角操作量105を算出する動作と並行して、パン角位置センサ値97をパン角センサ51から収集し、パン角位置センサ値97とパン角指令値91とに基づいてパン角操作量105を算出する。パンフレーム46は、ガントリ走行フレーム45に対するパン角度がパン角指令値91を示すように、パン軸駆動装置67によりパン角操作量105に基づいて駆動される。このような動作は、放射線治療装置制御装置2による患部位置の算出に比較して十分に短く、たとえば、5msごとに周期的に実行される。
【0076】
その照射動作では、放射線治療装置制御装置2は、その追尾動作により治療用放射線照射装置16が移動した直後に、治療用放射線照射装置16を用いて治療用放射線23をその患部に照射する。放射線治療装置制御装置2は、このような追尾動作と照射動作とを、患者43の患部に照射された治療用放射線23の線量がその治療計画の線量になるまで繰り返して実行する。
【0077】
このような追尾動作では、チルト角位置偏差100が大きいときに、チルト角操作量101が大きくなり過ぎないで、パン角位置偏差100が大きいときに、パン角操作量101が大きくなり過ぎない。このため、治療用放射線照射装置動作制御装置5は、チルト角位置偏差100が大きいときに、チルト軸駆動装置68を用いてパンフレーム46に対してチルトフレーム47をより安定して駆動することができ、パン角位置偏差100が大きいときに、パン軸駆動装置67を用いてガントリ走行フレーム45に対してパンフレーム46をより安定して駆動することができる。このため、治療用放射線照射装置動作制御装置5は、係数演算部122と乗算器123とを備えない周知の既存の治療用放射線照射装置動作制御装置に比較して、チルト軸駆動装置68を用いてチルトフレーム47を安定して回転させることができ、チルト軸駆動装置68をより高精度に制御することができ、パン軸駆動装置67を用いてパンフレーム46を安定して回転させることができ、パン軸駆動装置67をより高精度に制御することができる。
【0078】
このような追尾動作では、治療用放射線照射装置動作制御装置5は、さらに、温度計69により測定された配電盤の温度に基づいてチルト角温度ドリフト補正量104を算出し、パン角温度ドリフト補正量104を算出する。このようなチルト角温度ドリフト補正量104とパン角温度ドリフト補正量104とによれば、治療用放射線照射装置動作制御装置5は、チルト軸駆動装置68を駆動する必要がないときに、より確実に駆動させないように制御することができ、パン軸駆動装置67を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0079】
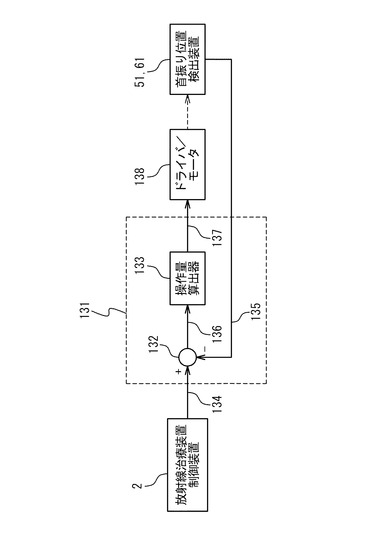
図11は、本発明による治療用放射線照射装置動作制御装置の実施の他の形態を示している。その治療用放射線照射装置動作制御装置131は、加算器132と操作量算出器133とを備えている。
【0080】
加算器132は、放射線治療装置制御装置2により算出されたチルト角指令値134からチルト角センサ61により測定されたチルト角位置センサ値135を減算してチルト角位置偏差136を算出する。操作量算出器133は、チルト角位置偏差136に基づいてチルト角操作量137を算出する。このような算出は、周知のものが適用される。ドライバ/モータ138は、チルト角操作量137に基づいて、パンフレーム46に対するチルトフレーム47の角度がチルト角指令値134になるようにチルトフレーム47を駆動する。
【0081】
加算器132は、さらに、放射線治療装置制御装置2により算出されたパン角指令値134からパン角センサ51により測定されたパン角位置センサ値135を減算してパン角位置偏差136を算出する。操作量算出器133は、パン角位置偏差136に基づいてパン角操作量137を算出する。このような算出は、周知のものが適用される。ドライバ/モータ138は、パン角操作量137に基づいて、ガントリ走行フレーム45に対するパンフレーム46の角度がパン角指令値134になるように治療用放射線照射装置16を駆動する。
【0082】
治療用放射線照射装置動作制御装置131は、チルト角センサ61とパン角センサ51とにより測定される測定結果が十分に高精度であるときに、チルト軸駆動装置68をより高精度に制御することができ、パン軸駆動装置67をより高精度に制御することができる。すなわち、放射線治療装置3は、チルト角センサ61とパン角センサ51とにより測定される測定結果が十分に高精度であるときに、係数演算部122と乗算器123とを備えない周知の治療用放射線照射装置動作制御装置131が適用されることもできる。
【0083】
なお、既述の実施の形態における治療用放射線照射装置動作制御装置5は、チルト軸駆動装置68が備えるロータリーエンコーダを首振り位置検出装置として用い、その測定結果を用いてチルト軸駆動装置68を制御することができ、または、パン軸駆動装置67が備えるロータリーエンコーダを首振り位置検出装置として用い、その測定結果を用いてパン軸駆動装置67を制御することができる。このとき、治療用放射線照射装置動作制御装置5は、パン角センサ51とチルト角センサ61とを用いるときと同様にして、チルト軸駆動装置68をより高精度に制御することができ、パン軸駆動装置67をより高精度に制御することができる。
【0084】
既述の実施の形態における治療用放射線照射装置動作制御装置5は、さらに、パンフレーム46がガントリ走行フレーム45に対して平行移動するように駆動され、チルトフレーム47がパンフレーム46に対して平行移動するように駆動される放射線治療装置に適用されることができる。このとき、治療用放射線照射装置動作制御装置5は、既述の実施の形態における放射線治療装置3に適用されたときと同様にして、目標位置と位置センサ値との位置偏差が大きいときに操作量を小さくすることができ、パンフレーム46とチルトフレーム47とを安定して駆動させることができ、パンフレーム46とチルトフレーム47とをより高精度に駆動することができる。
【図面の簡単な説明】
【0085】
【図1】図1は、放射線治療システムを示すブロック図である。
【図2】図2は、本発明による放射線治療装置を示す斜視図である。
【図3】図3は、首振り機構を示す斜視図である。
【図4】図4は、パン角センサを示す平面図である。
【図5】図5は、チルト角センサを示す平面図である。
【図6】図6は、本発明による治療用放射線照射装置動作制御装置を示すブロック図である。
【図7】図7は、目標位置の変化を示し、補正後指令値の変化を示すグラフである。
【図8】図8は、D/A変換回路の入力と出力の関係を示すグラフである。
【図9】図9は、操作量算出部を示すブロック図である。
【図10】図10は、位置偏差と係数との関係を示すグラフである。
【図11】図11は、他の治療用放射線照射装置動作制御装置を示すブロック図である。
【符号の説明】
【0086】
1 :放射線治療システム
2 :放射線治療装置制御装置
3 :放射線治療装置
5 :治療用放射線照射装置動作制御装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り機構
16:治療用放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:MLC(マルチリーフコリメータ)
21:チルト軸
22:パン軸
23:治療用放射線
24:診断用X線源
25:診断用X線源
31:センサアレイ
32:センサアレイ
33:センサアレイ
35:診断用X線
36:診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
45:ガントリ走行フレーム
46:パンフレーム
47:チルトフレーム
51:パン角センサ
52:パン角センサ本体
54:パン角スケール部分
55:パン角スケール
61:チルト角センサ
62:チルト角センサ本体
63:支持部分
64:チルト角スケール部分
65:チルト角スケール
67:パン軸駆動装置
68:チルト軸駆動装置
69:温度計
71:たわみ補正量算出部
72:加算器
73:ランプ処理部
74:加算器
76:加算器
77:加算器
78:首振り位置制御部
79:ノッチフィルタ
80:フィードフォワード部
81:温度ドリフト補正部
82:加算器
83:D/A変換回路
84:アンプ
85:ドライバ
91:指令値
92:Oリング軸指令値とガントリ軸指令値との組
93:たわみ補正量
94:補正後指令値
95:ランプ処理補正量
96:目標位置値
97:位置センサ値
98:原点オフセット値
99:位置実績値
100:位置偏差
101:操作量
102:補正後操作量
103:フィードフォワード操作量
104:温度ドリフト補正量
105:操作量
106:制御電気信号
107:制御電気信号
108:駆動電気信号
109:変化
110:変化
111:関係
112:最大値
113:最小値
114:値
115:値
121:操作量算出部
122:係数演算部
123:乗算器
124:操作量
125:係数
126:関係
131:治療用放射線照射装置動作制御装置
132:加算器
133:操作量算出器
134:指令値
135:位置センサ値
136:位置偏差
137:操作量
138:ドライバ/モータ
【技術分野】
【0001】
本発明は、放射線照射装置動作制御装置および放射線照射装置動作制御方法に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療は、治療効果が高いことが望まれ、その放射線は、患部の細胞に照射される線量に比較して、正常な細胞に照射される線量がより小さいことが望まれている。このためには治療用放射線を正確に患部に照射する必要がある。その放射線治療を実行する放射線治療装置は、患者の透過画像を撮像するイメージャシステムと、その治療用放射線を出射する治療用放射線照射装置と、その治療用放射線照射装置を駆動する駆動装置とを備えている。その放射線治療装置は、その透過画像に基づいて患部の位置を算出し、その位置に治療用放射線が照射されるようにその駆動装置を用いてその治療用放射線照射装置を駆動する。
【0003】
治療効果が高い放射線治療として、動体追尾照射が知られている。その動体追尾照射を実行する放射線治療装置は、患者の透過画像を撮像するイメージャシステムと、その治療用放射線を出射する治療用放射線照射装置と、その治療用放射線照射装置を駆動する駆動装置とを備えている。その放射線治療装置は、その透過画像に基づいて患部の位置を算出し、その位置に治療用放射線が照射されるようにその駆動装置を用いてその治療用放射線照射装置を駆動する。その放射線治療装置は、このような動作を数十msごとに繰り返して実行する。このような動体追尾照射によれば、呼吸・心鼓動に例示される患者の運動とともに患部が移動する場合であっても、患部以外の正常な細胞に照射される治療用放射線の線量に比較して、患部の細胞に照射される治療用放射線の線量が大きく、治療効果が高い。放射線治療装置は、このような駆動装置をより高精度に制御することが望まれている。
【0004】
特開2004−65808号公報には、患者の体動に対して常に最適位置に照射できるようにする放射線治療装置が開示されている。その放射線治療装置は、電子線の発生源と、前記電子線の方向を変える偏向電磁石と、真空を保持しながら前記電子線を通過させる真空窓と、前記電子線を散乱させる散乱箔と、前記電子線をX線に変換するターゲットと、電子線とX線の線量分布を照射面において一様にする平坦化フィルタと、電子線とX線を絞り込むコリメータと、電子線とX線の線量を測定する線量計から構成される照射ヘッドと、前記照射ヘッドを保持するガントリーアームを含む放射線治療装置であって、前記電子線の発生源と前記偏向電磁石とを真空ロータリージョイントで結合し、前記ガントリーアーム回転軸と平行で仮想線源位置を通る軸を中心として前記照射ヘッドを首振り運動させる回転手段を備えてなる。
【0005】
特開2006−21046号公報には、放射線の照射治療中においても、リアルタイムに治療野の状態をモニタすることが可能な放射線治療装置が開示されている。その放射線治療装置は、O型ガントリと、前記O型ガントリに移動可能に設けられ、被検体の治療野へ治療用放射線を照射する放射線照射ヘッドと、前記O型ガントリに移動可能に設けられ、前記被検体の前記治療野に診断用X線を照射するX線源と、前記O型ガントリに移動可能に設けられ、前記被検体を透過した前記診断用X線の透過X線を検出して、診断画像データとして出力するセンサアレイとを具備し、前記センサアレイは、前記放射線照射ヘッドを挟んで対象な位置に設けられ、前記O型ガントリ上を前記放射線照射ヘッドの移動に連動して動き、前記X線源は、前記センサアレイの動きに連動して動く。
【0006】
【特許文献1】特開2004−65808号公報
【特許文献2】特開2006−21046号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の課題は、照射対象の運動に追従して放射線の照射位置を移動するための駆動装置を小型化する治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法を提供することにある。
本発明の他の課題は、照射対象の運動に追従して放射線の照射位置を移動するための駆動装置をより高精度に制御する治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法を提供することにある。
本発明のさらに他の課題は、既存の治療用放射線照射装置動作制御装置から本治療用放射線照射装置動作制御装置に改造することが容易であり、放射線の照射位置を移動するための駆動装置をより高精度に制御する治療用放射線照射装置動作制御装置を提供することにある。
本発明のさらに他の課題は、照射対象の運動に追従して放射線の照射位置を移動する既存の治療用放射線照射装置動作制御装置から本治療用放射線照射装置動作制御方法を実行する治療用放射線照射装置動作制御装置に改造することが容易である治療用放射線照射装置動作制御方法を提供することにある。
本発明のさらに他の課題は、照射対象の運動に追従して放射線の照射位置をより高精度に移動する放射線治療装置を提供することにある。
本発明のさらに他の課題は、照射対象の運動に追従して放射線の照射位置を移動する駆動装置をより高精度に制御する放射線治療装置を提供することにある。
本発明のさらに他の課題は、任意の方向からの照射に対して放射線の照射位置をより高精度に移動する放射線治療装置及び放射線照射ヘッド制御方法を提供することにある。
本発明のさらに他の課題は、任意の方向からの照射に対して放射線の照射位置を移動する駆動装置をより高精度に制御する放射線治療装置及び治療用放射線照射装置制御方法を提供することにある。
【課題を解決するための手段】
【0008】
以下に、発明を実施するための最良の形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための最良の形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による治療用放射線照射装置動作制御装置(5)は、治療用放射線(23)を出射する放射線照射装置(16)をフレーム(46)に対して駆動する駆動装置(67、68)を備えている放射線治療装置(3)において、目標位置(91、94、96)と放射線照射装置(16)の位置との位置偏差(100)を、目標位置(91、94、96)と位置検出センサ(51、61)により測定された位置センサ値(97、99)とに基づいて算出する演算器(77)と、位置偏差(100)に基づいて係数(125)を算出する係数演算部(122)と、補正前操作量(124)に係数(125)を乗算して補正後操作量(101)を算出する乗算器(123)とを備えている。係数(125)は、位置偏差(100)の絶対値に関して単純に減少する。駆動装置(67、68)は、補正後操作量(101)に基づいて、フレーム(46)に対して放射線照射装置(16)が目標位置(91、94、96)に配置されるように、制御される。
【0010】
目標位置(91、94、96)は、治療用放射線(23)の照射位置が照射対象(43)の位置に合致するように、かつ、治療用放射線(23)が照射対象(43)に追従するように、算出される。
【0011】
本発明による治療用放射線照射装置動作制御装置(5)は、位置偏差(100)に基づいて補正前操作量(124)を算出する操作量算出部(121)をさらに備えている。
【0012】
本発明による治療用放射線照射装置動作制御装置(5)は、本治療用放射線照射装置動作制御装置(5)により駆動装置(67、68)が制御されるときに駆動装置(67、68)に供給される電気信号を生成する装置(83、84)の温度に基づいて温度ドリフト量(104)を算出する温度ドリフト補正部(81)をさらに備えている。駆動装置(67、68)は、温度ドリフト量(104)にさらに基づいて制御される。
【0013】
放射線治療装置(3)は、異なる2軸以上の軸(21、22)に対して放射線照射装置(16)が移動可能な機構を有しており、駆動装置(67、68)は、軸(21、22)の各軸の移動を各々独立に制御を行う。
【0014】
当該移動動作は、軸(21、22)を中心とした放射線照射装置(16)の回転動作である。
【0015】
位置検出センサ(51、61)の少なくとも一つは、フレーム(46)または放射線照射装置(16)の一方に固定されるセンサ本体(62)と、フレーム(46)または放射線照射装置(16)の他方に固定されるスケール部分(64)とを備えている。スケール部分(64)は、その軸の1つを中心とする円弧に沿って配置されるスケール(65)が形成されている。センサ本体(62)は、スケール(65)を観測することにより、フレーム(46)に対する放射線照射装置(16)の位置を測定する。
【0016】
放射線治療装置(3)は、フレーム(46)を移動可能に支持する他のフレーム(45)をさらに備えている。位置検出センサ(51、61)は、フレーム(46)または他のフレーム(45)の一方に固定される他のセンサ本体(52)と、フレーム(46)または他のフレーム(45)の他方に固定される他のスケール部分(54)とを備えている。他のスケール部分(54)は、その軸の他の1つを中心とする円弧に沿って配置される他のスケール(55)が形成されている。他のセンサ本体(52)は、他のスケール(55)を観測することにより、他のフレーム(45)に対するフレーム(46)の位置を測定する。
【0017】
本発明による放射線治療システム(1)は、本発明による治療用放射線照射装置動作制御装置(5)と、放射線治療装置(3)と、当該放射線治療装置(3)を制御する放射線治療装置制御装置(2)とを備えている。
【0018】
本発明による治療用放射線照射装置動作制御方法は、治療用放射線(23)を出射する放射線照射装置(16)をフレーム(46)に対して駆動する駆動装置(67、68)を備えている放射線治療装置(3)を制御する。本発明による治療用放射線照射装置動作制御方法は、目標位置(91、94、96)と放射線照射装置(16)の位置との位置偏差(100)を、目標位置(91、94、96)と位置検出センサ(51、61)により測定された位置センサ値(97、99)とに基づいて位置偏差(100)を算出するステップと、位置偏差(100)に基づいて係数(125)を算出するステップと、補正前操作量(124)に係数(125)を乗算して補正後操作量(101)を算出するステップとを備えている。係数(125)は、位置偏差(100)の絶対値に関して単純に減少する。駆動装置(67、68)は、補正後操作量(101)に基づいて、フレーム(46)に対して放射線照射装置(16)が目標位置(91、94、96)に配置されるように、制御される。
【0019】
目標位置(91、94、96)は、治療用放射線(23)の照射位置が照射対象(43)の位置に合致するように、かつ、治療用放射線(23)が照射対象(43)に追従するように、算出される。
【0020】
本発明による治療用放射線照射装置動作制御方法は、位置偏差(100)に基づいて補正前操作量(124)を算出するステップをさらに備えている。
【0021】
本発明による治療用放射線照射装置動作制御方法は、本治療用放射線照射装置動作制御方法により駆動装置(67、68)が制御されるときに駆動装置(67、68)に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量(104)を算出するステップをさらに備えている。駆動装置(67、68)は、温度ドリフト量(104)にさらに基づいて制御される。
【0022】
放射線治療装置(3)は、異なる2軸以上の軸に対して放射線照射装置(16)が移動可能な機構を有しており、駆動装置(67、68)は、その軸の各軸の移動を各々独立に制御される。
【0023】
当該移動動作は、当該軸を中心とした放射線照射装置(16)の回転動作である。
【0024】
位置検出センサ(51、61)の少なくとも一つは、フレーム(46)または放射線照射装置(16)の一方に固定されるセンサ本体(62)と、フレーム(46)または放射線照射装置(16)の他方に固定されるスケール部分(64)とを備えている。スケール部分(64)は、その軸の1つを中心とする円弧に沿って配置されるスケール(65)が形成されている。センサ本体(62)は、スケール(65)を観測することにより、フレーム(46)に対する放射線照射装置(16)の位置を測定する。
【0025】
放射線治療装置(3)は、フレーム(46)を移動可能に支持する他のフレーム(45)をさらに備えている。位置検出センサ(51、61)は、フレーム(46)または他のフレーム(45)の一方に固定される他のセンサ本体(52)と、フレーム(46)または他のフレーム(45)の他方に固定される他のスケール部分(54)とを備えている。他のスケール部分(54)は、その軸の他の1つを中心とする円弧に沿って配置される他のスケール(55)が形成されている。他のセンサ本体(52)は、他のスケール(55)を観測することにより、他のフレーム(45)に対するフレーム(46)の位置を測定する。
【0026】
本発明による放射線治療装置(3)は、治療用放射線(23)を出射する放射線照射装置(16)をフレーム(46)に対して回転させる駆動装置(68)と、フレーム(46)に対して放射線照射装置(16)が配置される角度位置センサ値(97、99)を測定する位置検出センサ(61)と、その角度位置センサ値(97、99)に基づいて駆動装置(68)を制御する治療用放射線照射装置動作制御装置(5)とを備えている。その位置検出センサ(61)は、フレーム(46)または放射線照射装置(16)の一方に固定されるセンサ本体(62)と、フレーム(46)または放射線照射装置(16)の他方に固定されるスケール部分(64)とを備えている。スケール部分(64)は、その回転軸を軸とする円柱の側面に沿って配置されるスケール(65)が形成されている。センサ本体(62)は、スケール(65)を観測することにより、フレーム(46)に対する放射線照射装置(16)の位置を測定する。
【0027】
本発明による放射線治療装置(3)は、フレーム(46)を移動可能に支持するフレーム(45)と、位置検出センサ(51)とをさらに備えている。位置検出センサ(51)は、フレーム(46)またはフレーム(45)の一方に固定されるセンサ本体(52)と、フレーム(46)またはフレーム(45)の他方に固定されるスケール部分(54)とを備えている。スケール部分(54)は、その軸の1つを中心とする円弧に沿って配置されるスケール(55)が形成されている。センサ本体(52)は、スケール(55)を観測することにより、フレーム(45)に対するフレーム(46)の位置を示す角度位置センサ値を出力する。治療用放射線照射装置動作制御装置(5)は、センサ本体(52)により出力される角度位置センサ値にさらに基づいて駆動装置(67)を制御する。
【発明の効果】
【0028】
本発明による治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法によれば、その位置偏差が大きい場合でも放射線照射装置を安定して移動させることができ、駆動装置をより高精度に制御することができる。本発明による治療用放射線照射装置動作制御装置は、さらに、駆動装置が操作量に基づいて制御される既存の治療用放射線照射装置動作制御装置を改造することにより、より容易に生産することができる。本発明による放射線治療装置は、放射線照射装置のフレームに対する角度をより高精度に測定することができ、放射線照射装置をより高精度に駆動することができ、特に、被検体の運動に追従して治療用放射線の照射位置をより高精度に駆動することができる。
【発明を実施するための最良の形態】
【0029】
図面を参照して、本発明による治療用放射線照射装置動作制御装置の実施の形態を記載する。その治療用放射線照射装置動作制御装置5は、図1に示されているように、放射線治療システム1に適用されている。放射線治療システム1は、放射線治療装置制御装置2と放射線治療装置3と治療用放射線照射装置動作制御装置5とを備えている。放射線治療装置制御装置2と治療用放射線照射装置動作制御装置5とは、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置2と放射線治療装置3と治療用放射線照射装置動作制御装置5とは、双方向に情報を伝送することができるように、互いに接続されている。
【0030】
図2は、放射線治療装置3を示している。放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、放射線治療装置制御装置2により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。Oリング12は、回転軸18を中心とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、放射線治療装置制御装置2により制御されて回転軸18を中心に走行ガントリ14を回転させる。
【0031】
首振り機構15は、走行ガントリ14のリングの内側に固定され、治療用放射線照射装置16が走行ガントリ14の内側に配置されるように、治療用放射線照射装置16を走行ガントリ14に支持している。首振り機構15は、チルト軸21およびパン軸22を有している。パン軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。チルト軸21は、パン軸22に直交している。首振り機構15は、放射線治療装置制御装置2により制御されて、パン軸22を中心に治療用放射線照射装置16を回転させ、チルト軸21を中心に治療用放射線照射装置16を回転させる。
【0032】
治療用放射線照射装置16は、放射線治療装置制御装置2により制御されて、治療用放射線23を放射する。治療用放射線23は、パン軸22とチルト軸21とが交差する交点を通る直線に概ね沿って放射される。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、MLC(マルチリーフコリメータ)20を備えている。そのMLC20は、放射線治療装置制御装置2により制御され、治療用放射線23の一部を遮蔽することにより、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0033】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、首振り機構15で治療用放射線照射装置16がアイソセンタ19に向かうように一旦調整されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0034】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、診断用X線源24、25とセンサアレイ32、33とを備えている。診断用X線源24は、走行ガントリ14に支持されている。診断用X線源24は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源24は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線35を放射する。診断用X線35は、診断用X線源24が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。診断用X線源25は、走行ガントリ14に支持されている。診断用X線源25は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源25は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線36を放射する。診断用X線36は、診断用X線源25が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。
【0035】
センサアレイ32は、走行ガントリ14に支持されている。センサアレイ32は、診断用X線源24により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線35を受光して、その被写体の透過画像を生成する。センサアレイ33は、走行ガントリ14に支持されている。センサアレイ33は、診断用X線源25により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線36を受光して、その被写体の透過画像を生成する。センサアレイ32、33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0036】
このようなイメージャシステムによれば、センサアレイ32、33により得た画像信号に基づき、アイソセンタ19を中心とする透過画像を生成することができる。
【0037】
放射線治療装置3は、さらに、センサアレイ31を備えている。センサアレイ31は、センサアレイ31と治療用放射線照射装置16とを結ぶ線分がアイソセンタ19を通るように配置されて、走行ガントリ14のリングの内側に固定されている。センサアレイ31は、治療用放射線照射装置16により放射されてアイソセンタ19の周辺の被写体を透過した治療用放射線23を受光して、その被写体の透過画像を生成する。センサアレイ31としては、FPD、X線IIが例示される。
【0038】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、放射線治療システム1により治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ41に固定する。カウチ駆動装置42は、カウチ41を土台に支持し、放射線治療装置制御装置2により制御されてカウチ41を移動させる。
【0039】
図3は、首振り機構15を示している。首振り機構15は、ガントリ走行フレーム45とパンフレーム46とチルトフレーム47とを備えている。ガントリ走行フレーム45は、走行ガントリ14に固定され、走行ガントリ14と同体に運動する。パンフレーム46は、パン軸22を中心に回転可能にガントリ走行フレーム45に支持されている。パン軸22は、ガントリ走行フレーム45に対して固定されている。ガントリ走行フレーム45は、図示されていないストッパを備えている。パンフレーム46は、パン軸22を中心に回転するときに、そのストッパに接触して、回転することができる範囲が制限されている。チルトフレーム47は、チルト軸21を中心に回転可能にパンフレーム46に支持されている。チルト軸21は、パンフレーム46に対して固定されている。チルトフレーム47は、さらに、チルト軸21を中心に回転するときに、パンフレーム46の一部に接触して、回転することができる範囲が制限されている。治療用放射線照射装置16は、チルトフレーム47に固定されている。なお、首振り機構15は、アイソセンタ19または図示されていない患部に治療用放射線23が向かうように調整するために用いることから、パン軸22とチルト軸21は、治療用放射線23が放射される仮想的点線源に両軸の交点がほぼ一致するように、配置されることが望ましい。
【0040】
首振り機構15は、さらに、図3に図示されていないパン軸駆動装置とチルト軸駆動装置とを備えている。そのパン軸駆動装置は、放射線治療装置制御装置2により制御されて、ガントリ走行フレーム45に対してパン軸22を中心にパンフレーム46を回転させる。そのチルト軸駆動装置は、放射線治療装置制御装置2により制御されて、パンフレーム46に対してチルト軸21を中心にチルトフレーム47を回転させる。
【0041】
放射線治療装置3は、さらに、首振り位置検出装置を備えている。その首振り位置検出装置は、図4に示されているように、パン角センサ51を備えている。パン角センサ51は、いわゆるリニアスケールから形成され、パン角センサ本体52とパン角スケール部分54とを備えている。パン角スケール部分54は、パンフレーム46に固定され、パンフレーム46と同体に運動する。パン角スケール部分54は、パン軸22を中心とする円弧に形成される部分を有している。パン角スケール部分54は、パン角スケール55を備えている。パン角スケール55は、複数の磁石から形成される目盛りから形成され、パン角スケール部分54のその円弧に沿って配置されている。パン角センサ本体52は、パン角スケール部分54のパン角スケール55に近接するように配置され、走行ガントリ14と同体に運動するように走行ガントリ14に固定されている。パン角センサ本体52は、磁界の変化を検出することにより、走行ガントリ14に対するパンフレーム46の角度(パン角)を測定し、そのパン角を治療用放射線照射装置動作制御装置5に出力する。
【0042】
ロータリーエンコーダは、一般に、リニアスケールと同様にして、スケールを観測することにより回転角度を測定する。パン角センサ51は、このようなロータリーエンコーダに比較して、スケールを回転軸からより遠い位置にも配置することができると共に角度を高精度に測定することができる。当該設置可能距離は必要測定精度、リニアスケール分解能及びアイソセンタ19とパン軸22との距離により決まり、たとえば、パン軸22から190mmが例示される。更にロータリーエンコーダは回転体そのものの回転を測定するのに対して、リニアスケールを用いる手法では回転物そのものの回転を評価することができるためより高精度に測定が可能になる。更にリニアスケールはロータリーエンコーダよりも耐放射線性が高いため、放射線治療装置内で使用するには適している。なお、測定系の信頼を高めるために、複数のリニアスケールまたはロータリーエンコーダとリニアスケールを併用することも有効である。パン角センサ51は、磁気方式が採用され、このとき、放射線による誤動作が少なく、好ましい。なお、パン角センサ51は、磁気方式と異なる他の方式が適用された他のリニアスケールに置換されることができる。その方式としては、光電方式、レーザ式が例示される。その光電方式は、スリット円板に光を当て、そのスリットを通過した光パルスの信号に基づいて位置検出する方式である。そのレーザ式は、回折格子であるホログラムスケールにレーザを照射し、光の回折と干渉を利用して位置検出する方式である。このようなリニアスケールも、パン角センサ51と同様にして、角度をより高精度に測定することができる。
【0043】
その首振り位置検出装置は、さらに、図5に示されているように、チルト角センサ61を備えている。チルト角センサ61は、いわゆるリニアスケールから形成され、チルト角センサ本体62と支持部分63とチルト角スケール部分64とを備えている。チルト角センサ本体62は、パンフレーム46に固定されている。チルト角スケール部分64は、チルトフレーム47に固定され、治療用放射線照射装置16と同体に運動する。チルト角スケール部分64は、チルト軸21を中心とする円弧に形成される部分を有している。チルト角スケール65は、複数の磁石から形成される目盛りから形成され、チルト角スケール部分64のその円弧に沿って配置されている。支持部分63は、パンフレーム46に固定され、チルト角センサ本体62に固定される。すなわち、チルト角センサ本体62がパンフレーム46と同体に運動するように、パンフレーム46にチルト角センサ本体62を支持している。チルト角センサ本体62は、チルト角スケール部分64のチルト角スケール65に近接するように配置され、磁界の変化を検出することにより、パンフレーム46に対するチルトフレーム47の角度(チルト角)を測定し、そのチルト角を治療用放射線照射装置動作制御装置5に出力する。
【0044】
チルト角センサ61は、ロータリーエンコーダに比較して、スケールを回転軸からより遠い位置に配置することができ、角度をより高精度に測定することができる。当該設置可能距離は必要測定精度、リニアスケール分解能及びアイソセンタ19とチルト軸21との距離により決まり、たとえば、チルト軸21から260mmが例示される。更にロータリーエンコーダは回転体そのものの回転を測定するのに対して、リニアスケールを用いる手法では回転物そのものの回転を評価することができるためより高精度に測定が可能になる。更にリニアスケールはロータリーエンコーダよりも耐放射線性が高いため、放射線治療装置内で使用するには適している。なお、測定系の信頼を高めるために、複数のリニアスケールまたはロータリーエンコーダとリニアスケールを併用することも有効である。チルト角センサ61は、磁気方式が採用され、このとき、放射線による誤動作が少なく、好ましい。なお、チルト角センサ61は、磁気方式と異なる他の方式が適用された他のリニアスケールに置換されることができる。このようなリニアスケールも、チルト角センサ61と同様にして、角度をより高精度に測定することができる。
【0045】
なお、パン角センサ51及びチルト角センサ61の各構成要素の配置は、本事例に限定されるものではなく、固定要素に対する可動要素の相対的角度を評価可能であるように配置されればよい。例えば、パン角センサ51において、パン角センサ本体52はパンフレーム46に固定され、また、パン角スケール部分54はガントリ走行フレーム45に固定されることでも同様に機能する。
【0046】
図6は、治療用放射線照射装置動作制御装置5を示している。治療用放射線照射装置動作制御装置5は、たわみ補正量算出部71と加算器72とランプ処理部73と加算器74と加算器76と加算器77と首振り位置制御部78とノッチフィルタ79とフィードフォワード部80と温度ドリフト補正部81と加算器82とを備えている。
【0047】
たわみ補正量算出部71は、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値とから形成される複数の組を複数のチルト角たわみ補正量に対応付けているテーブルを記憶装置に記録している。ここでOリング軸指令値とは、回転軸17を中心にOリング12を回転させるための指令値である。通常当該指令値は、事前に策定した治療計画に基づき自動的または半自動的に設定されうる。またガントリ軸指令値とは、回転軸18を中心に走行ガントリ14を回転ための指令値である。通常当該指令値は、事前に策定した治療計画に基づき設定される。またチルト角たわみ補正量は、別途事前に測定した値である。たわみ補正量算出部71は、そのテーブルを参照して、その複数のチルト角たわみ補正量のうちから、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値との組92に対応するチルト角たわみ補正量93を算出する。
【0048】
加算器72は、放射線治療装置制御装置2により算出されるチルト角指令値91にチルト角たわみ補正量93を加算して、チルト角補正後指令値94を算出する。ランプ処理部73は、チルト角補正後指令値94とチルト角補正後指令値94が入力されるタイミングとに基づいてチルト角ランプ処理補正量95を算出する。加算器74は、チルト角補正後指令値94にチルト角ランプ処理補正量95と加算して、チルト角目標位置値96を算出する。治療用放射線23がアイソセンタ19に向かうように調整するために首振り機構15を用いる場合には、チルト角指令値91は0を示すこととなる。
【0049】
加算器76は、チルト角センサ61により測定されるチルト角位置センサ値97にチルト角原点オフセット値98を加算して、チルト角位置実績値99を算出する。加算器77は、チルト角目標位置値96からチルト角位置実績値99を減算してチルト角位置偏差100を算出する。首振り位置制御部78は、チルト角位置偏差100に基づいてチルト角操作量101を算出する。ノッチフィルタ79は、チルト軸駆動装置の固有周波数の周波数成分をチルト角操作量101のうちから減衰させてチルト角補正後操作量102を算出する。
【0050】
フィードフォワード部80は、チルト角目標位置値96に基づいてチルト角フィードフォワード操作量103を算出する。温度ドリフト補正部81は、チルト角温度ドリフト補正量104を算出する。加算器82は、チルト角補正後操作量102にチルト角フィードフォワード操作量103とチルト角温度ドリフト補正量104とを加算してチルト角操作量105を算出する。
【0051】
放射線治療装置3は、さらに、D/A変換回路83とアンプ84とドライバ85と温度計69とを備えている。D/A変換回路83は、治療用放射線照射装置動作制御装置5により算出されたチルト角操作量105に対応する電圧のチルト角制御電気信号106を生成する。アンプ84は、チルト角制御電気信号106の電圧を増幅したチルト角制御電気信号107を出力する。D/A変換回路83とアンプ84とは、配電盤に配置されている。温度計69は、その配電盤の温度を測定する。温度ドリフト補正部81は、温度計69により測定された温度に基づいてチルト角温度ドリフト補正量104を算出する。ドライバ85は、チルト角制御電気信号107に対応する電流がチルト軸駆動装置68に流れるように、チルト軸駆動装置68にチルト軸駆動電気信号108を供給する。チルト軸駆動装置68は、チルト軸駆動電気信号108が供給されることにより、パンフレーム46に対してチルト軸21を中心にチルトフレーム47を回転させる。
【0052】
図7は、チルト角補正後指令値94の変化の一例を示している。その変化109は、チルト角補正後指令値94が急激に増減する期間とチルト角補正後指令値94がほとんど増減しない期間とが交互に周期的に出現するように変化することを示している。その周期は、患者43の周期的な運動(呼吸、心拍動)に比較して十分に小さく、数十msが例示される。図7は、さらに、チルト角目標位置値96の変化を示している。その変化110は、チルト角目標位置値96が増減する期間とチルト角目標位置値96がほとんど増減しない期間とが交互に出現するように変化することを示している。変化109と変化110とは、チルト角目標位置値96がほとんど増減しない期間で、チルト角目標位置値96がチルト角補正後指令値94に概ね一致していることを示している。変化109と変化110とは、チルト角目標位置値96が増減する傾きの絶対値が、チルト角補正後指令値94が増減する傾きの絶対値より小さいことを示している。すなわち、ランプ処理部73は、チルト角ランプ処理補正量95がチルト角目標位置値96からチルト角補正後指令値94を減算した値になるように、チルト角ランプ処理補正量95を算出する。
【0053】
図8は、D/A変換回路83とアンプ84とから形成される配電盤の入力と出力の関係を示している。その関係111は、その入力に関してその出力が単純に増加していることを示し、その出力がその入力に概ね比例していることを示している。関係111は、さらに、その出力が最大値112を有していることを示し、その出力が最小値113を有していることを示している。関係111は、さらに、その入力が0を示すときにその出力が0と異なる値114を示すことを示し、その出力が0を示すときにその入力が0と異なる値115を示すことを示している。値114と値115とは、その配電盤の温度により変化する。
【0054】
このとき、温度ドリフト補正部81は、配電盤の温度に基づいて値115がどのように変化するかを記憶装置に記録し、温度計69により測定された配電盤の温度に基づいて、チルト角補正後操作量102とチルト角フィードフォワード操作量103との和が0と示すときに、チルト角制御電気信号106の電圧が0Vを示すように、チルト角温度ドリフト補正量104を算出する。すなわち、チルト角温度ドリフト補正量104は、温度計69により測定された配電盤の温度に対応する値115に−1を乗算した値を示している。このような制御によれば、治療用放射線照射装置動作制御装置5は、チルト角補正後操作量102とチルト角フィードフォワード操作量103との和が0を示すときに、または指定したある値以下の値を示すときに、すなわち、チルト軸駆動装置68を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0055】
図9は、首振り位置制御部78を示している。首振り位置制御部78は、操作量算出部121と係数演算部122と乗算器123とを備えている。操作量算出部121は、チルト角位置偏差100に基づいて補正前チルト角操作量124を算出する。このような算出は、周知のものが適用される。係数演算部122は、チルト角位置偏差100に基づいてチルト角係数125を算出する。乗算器123は、補正前チルト角操作量124にチルト角係数125を乗算して、首振り位置制御部78の出力であるチルト角操作量101を算出する。
【0056】
このような首振り位置制御部78は、既存の操作量算出部121に係数演算部122と乗算器123とを追加することにより、容易に製造することができる。このため、治療用放射線照射装置動作制御装置5は、既存の治療用放射線照射装置動作制御装置を改造することにより、より容易に製造することができる。
【0057】
図10は、チルト角位置偏差100とチルト角係数125との関係を示している。その関係126は、チルト角位置偏差100の絶対値に関して、チルト角係数125が単純に減少していることを示している。関係126は、さらに、チルト角位置偏差100の絶対値が値e1以下であるときに、チルト角係数125が1を示すことを示している。関係126は、さらに、チルト角位置偏差100の絶対値が値e1以上であり、かつ、値e2以下であるときに、チルト角係数125が、チルト角位置偏差100の増加と共に、減少していることを示している。関係126は、さらに、チルト角位置偏差100の絶対値が値e2以上であるときに、チルト角係数125が値c1を示すことを示している。値c1は、チルト軸駆動装置68により生成される駆動力が、パンフレーム46に対してチルトフレーム47が回転する静止摩擦より大きくなるように、設定される。
【0058】
このようなチルト角係数125によれば、チルト角位置偏差100が大きいときに、チルト角操作量101が大きくなり過ぎない。このため、治療用放射線照射装置動作制御装置5は、チルト角位置偏差100が大きいときに、チルト軸駆動装置68を用いてパンフレーム46に対してチルトフレーム47をより安定して駆動することができる。このため、治療用放射線照射装置動作制御装置5は、チルト軸駆動装置68が補正前チルト角操作量124に基づいて制御される既存の治療用放射線照射装置動作制御装置に比較して、チルト角位置偏差100が大きいときに、チルト角操作量101を小さくすることができ、チルト軸駆動装置68を用いてチルトフレーム47を安定して回転させることができ、チルト軸駆動装置68をより高精度に制御することができる。
【0059】
治療用放射線照射装置動作制御装置5は、パンフレーム46に対してチルト軸21を中心にチルトフレーム47を回転させる制御と同様にして、ガントリ走行フレーム45に対してパン軸22を中心にパンフレーム46を回転させる。すなわち、たわみ補正量算出部71は、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値とから形成される複数の組を複数のパン角たわみ補正量に対応付けているテーブルを記憶装置に記録している。たわみ補正量算出部71は、そのテーブルを参照して、その複数のパン角たわみ補正量のうちから、放射線治療装置制御装置2により算出されるOリング軸指令値とガントリ軸指令値との組92に対応するパン角たわみ補正量93を算出する。
【0060】
加算器72は、放射線治療装置制御装置2により算出されるパン角指令値91にパン角たわみ補正量93を加算して、パン角補正後指令値94を算出する。ランプ処理部73は、パン角補正後指令値94とパン角補正後指令値94が入力されるタイミングとに基づいてパン角ランプ処理補正量95を算出する。加算器74は、パン角補正後指令値94にパン角ランプ処理補正量95と加算して、パン角目標位置値96を算出する。
【0061】
加算器76は、パン角センサ51により測定されるパン角位置センサ値97にパン角原点オフセット値98を加算して、パン角位置実績値99を算出する。加算器77は、パン角目標位置値96からパン角位置実績値99を減算してパン角位置偏差100を算出する。操作量算出部121は、パン角位置偏差100に基づいて補正前パン角操作量124を算出する。係数演算部122は、パン角位置偏差100に基づいてパン角係数125を算出する。乗算器123は、補正前パン角操作量124にパン角係数125を乗算して、首振り位置制御部78の出力であるパン角操作量101を算出する。ノッチフィルタ79は、パン軸駆動装置の固有周波数の周波数成分をパン角操作量101のうちから減衰させてパン角補正後操作量102を算出する。
【0062】
フィードフォワード部80は、パン角目標位置値96に基づいてパン角フィードフォワード操作量103を算出する。加算器82は、パン角補正後操作量102にパン角フィードフォワード操作量103と温度ドリフト補正部81により算出されるパン角温度ドリフト補正量104とを加算してパン角操作量105を算出する。
【0063】
放射線治療装置3は、さらに、D/A変換回路83とアンプ84とドライバ85とを備えている。D/A変換回路83は、治療用放射線照射装置動作制御装置5により算出されたパン角操作量105に対応する電圧のパン角制御電気信号106を生成する。アンプ84は、パン角制御電気信号106の電圧を増幅したパン角制御電気信号107を出力する。ドライバ85は、パン角制御電気信号107に対応する電流がパン軸駆動装置67に流れるように、パン軸駆動装置67にパン軸駆動電気信号108を供給する。パン軸駆動装置67は、パン軸駆動電気信号108が供給されることにより、ガントリ走行フレーム45に対してパン軸22を中心にパンフレーム46を回転させる。
【0064】
パン角補正後指令値94とパン角目標位置値96とは、それぞれ、チルト角補正後指令値94とチルト角目標位置値96と同様にして変化する。すなわち、パン角補正後指令値94とパン角目標位置値96とは、それぞれ、増減する期間とほとんど増減しない期間とが交互に出現するように変化し、パン角目標位置値96が増減する傾きの絶対値がパン角補正後指令値94が増減する傾きの絶対値より小さい。すなわち、ランプ処理部73は、パン角ランプ処理補正量95がパン角目標位置値96からパン角補正後指令値94を減算した値になるように、パン角ランプ処理補正量95を算出する。
【0065】
パン角位置偏差100とパン角係数125とは、それぞれ、チルト角位置偏差100とチルト角係数125と同様にして変化する。すなわち、パン角係数125は、パン角位置偏差100の絶対値が値e1以下であるときに1を示し、パン角位置偏差100の絶対値が値e1以上であり、かつ、値e2以下であるときに減少し、パン角位置偏差100の絶対値が値e2以上であるときに、値c1を示している。値c1は、パン軸駆動装置67により生成される駆動力が、ガントリ走行フレーム45に対してパンフレーム46が回転する静止摩擦より大きくなるように、設定される。
【0066】
このようなパン角係数125によれば、パン角位置偏差100が大きいときに、パン角操作量101が大きくなり過ぎない。このため、治療用放射線照射装置動作制御装置5は、パン角位置偏差100が大きいときに、パン軸駆動装置67を用いてパンフレーム46に対して治療用放射線照射装置16をより安定して駆動することができる。このため、治療用放射線照射装置動作制御装置5は、パン軸駆動装置67が補正前パン角操作量124に基づいて制御される既存の治療用放射線照射装置動作制御装置に比較して、パン角位置偏差100が大きいときに、パン角操作量101を小さくすることができ、パン軸駆動装置67を用いてパンフレーム46を安定して回転させることができ、パン軸駆動装置67をより高精度に制御することができる。
【0067】
さらに、温度ドリフト補正部81は、パン角補正後操作量102とパン角フィードフォワード操作量103との和が0と示すときに、パン角制御電気信号106の電圧が0Vを示すように、パン角温度ドリフト補正量104を算出する。このような制御によれば、治療用放射線照射装置動作制御装置5は、パン角補正後操作量102とパン角フィードフォワード操作量103との和が0を示すときに、または指定したある値以下の値を示すときに、すなわち、パン軸駆動装置67を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0068】
放射線治療装置制御装置2により実行される動作は、治療計画を作成する動作と、放射線治療する動作とを備えている。
【0069】
その治療計画を作成する動作では、まず、ユーザは、その患者の患部とその患部の周辺の部位との3次元データに基づいて、その患者の患部とその患部の周辺の臓器とを示す画像を生成する。ユーザは、放射線治療装置制御装置2を用いてその画像を閲覧し、その患部の位置を特定する。ユーザは、さらに、その画像に基づいて治療計画を作成し、その治療計画を放射線治療装置制御装置2に入力する。その治療計画は、その患者の患部に治療用放射線を照射する照射角度と、その各照射角度から照射する治療用放射線の線量および性状とを示している。
【0070】
その放射線治療する動作では、ユーザは、まず、その3次元データを採取したときと同様の姿勢に放射線治療装置3のカウチ41にその患者を固定する。ユーザは、患者の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。ユーザは、その透過画像の撮像とカウチ41の移動とを繰り返して、患者の患部がアイソセンタ19に正確に重なるように患者の患部を配置する。
【0071】
放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、放射線治療装置3のイメージャシステムを用いてその患者の患部の透過画像を撮像する。放射線治療装置制御装置2は、その治療計画の照射角度で患者43の患部に治療用放射線23が照射されるように、その透過画像に基づいてOリング軸指令値とガントリ軸指令値とを算出し、Oリング12を駆動し、走行ガントリ14を駆動する。なお、構造物であるOリング12及び走行ガントリは、当該駆動した条件に応じて搭載物を含めた自重に基づく変形を生じる。このため本変形量によっては、首振り機構15で治療用放射線照射装置16がまずはアイソセンタ19に向かうように調整されることが望ましい。放射線治療装置制御装置2は、その透過画像の撮像とOリング12と走行ガントリ14との駆動とを繰り返して、その治療計画の照射角度で患者43の患部に治療用放射線23が照射されるように、治療用放射線照射装置16を正確に配置する。
【0072】
患者43の患部が呼吸・心鼓動に例示される患者の運動とともに患部が移動する場合には、放射線治療装置制御装置2は、治療用放射線照射装置16による治療用放射線の照射位置が患者43の患部の位置に合うように、追尾動作と照射動作とを繰り返して実行する。
【0073】
その追尾動作では、放射線治療装置制御装置2は、放射線治療装置3のイメージャシステムにより撮像された画像に基づいて患部位置を算出する。その患部位置に基づき、チルト角指令値91とパン角指令値91とが算出される。このような患部位置の算出は、たとえば、30msごとに周期的に実行される。
【0074】
その追尾動作では、治療用放射線照射装置動作制御装置5は、チルト角位置センサ値97をチルト角センサ61から収集し、チルト角位置センサ値97とチルト角指令値91とに基づいてチルト角操作量105を算出する。チルトフレーム47は、パンフレーム46に対するチルト角がチルト角指令値91を示すように、チルト軸駆動装置68によりチルト角操作量105に基づいて駆動される。このような動作は、放射線治療装置制御装置2による患部位置の算出に比較して十分に短く、たとえば、5msごとに周期的に実行される。
【0075】
治療用放射線照射装置動作制御装置5は、チルト角操作量105を算出する動作と並行して、パン角位置センサ値97をパン角センサ51から収集し、パン角位置センサ値97とパン角指令値91とに基づいてパン角操作量105を算出する。パンフレーム46は、ガントリ走行フレーム45に対するパン角度がパン角指令値91を示すように、パン軸駆動装置67によりパン角操作量105に基づいて駆動される。このような動作は、放射線治療装置制御装置2による患部位置の算出に比較して十分に短く、たとえば、5msごとに周期的に実行される。
【0076】
その照射動作では、放射線治療装置制御装置2は、その追尾動作により治療用放射線照射装置16が移動した直後に、治療用放射線照射装置16を用いて治療用放射線23をその患部に照射する。放射線治療装置制御装置2は、このような追尾動作と照射動作とを、患者43の患部に照射された治療用放射線23の線量がその治療計画の線量になるまで繰り返して実行する。
【0077】
このような追尾動作では、チルト角位置偏差100が大きいときに、チルト角操作量101が大きくなり過ぎないで、パン角位置偏差100が大きいときに、パン角操作量101が大きくなり過ぎない。このため、治療用放射線照射装置動作制御装置5は、チルト角位置偏差100が大きいときに、チルト軸駆動装置68を用いてパンフレーム46に対してチルトフレーム47をより安定して駆動することができ、パン角位置偏差100が大きいときに、パン軸駆動装置67を用いてガントリ走行フレーム45に対してパンフレーム46をより安定して駆動することができる。このため、治療用放射線照射装置動作制御装置5は、係数演算部122と乗算器123とを備えない周知の既存の治療用放射線照射装置動作制御装置に比較して、チルト軸駆動装置68を用いてチルトフレーム47を安定して回転させることができ、チルト軸駆動装置68をより高精度に制御することができ、パン軸駆動装置67を用いてパンフレーム46を安定して回転させることができ、パン軸駆動装置67をより高精度に制御することができる。
【0078】
このような追尾動作では、治療用放射線照射装置動作制御装置5は、さらに、温度計69により測定された配電盤の温度に基づいてチルト角温度ドリフト補正量104を算出し、パン角温度ドリフト補正量104を算出する。このようなチルト角温度ドリフト補正量104とパン角温度ドリフト補正量104とによれば、治療用放射線照射装置動作制御装置5は、チルト軸駆動装置68を駆動する必要がないときに、より確実に駆動させないように制御することができ、パン軸駆動装置67を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0079】
図11は、本発明による治療用放射線照射装置動作制御装置の実施の他の形態を示している。その治療用放射線照射装置動作制御装置131は、加算器132と操作量算出器133とを備えている。
【0080】
加算器132は、放射線治療装置制御装置2により算出されたチルト角指令値134からチルト角センサ61により測定されたチルト角位置センサ値135を減算してチルト角位置偏差136を算出する。操作量算出器133は、チルト角位置偏差136に基づいてチルト角操作量137を算出する。このような算出は、周知のものが適用される。ドライバ/モータ138は、チルト角操作量137に基づいて、パンフレーム46に対するチルトフレーム47の角度がチルト角指令値134になるようにチルトフレーム47を駆動する。
【0081】
加算器132は、さらに、放射線治療装置制御装置2により算出されたパン角指令値134からパン角センサ51により測定されたパン角位置センサ値135を減算してパン角位置偏差136を算出する。操作量算出器133は、パン角位置偏差136に基づいてパン角操作量137を算出する。このような算出は、周知のものが適用される。ドライバ/モータ138は、パン角操作量137に基づいて、ガントリ走行フレーム45に対するパンフレーム46の角度がパン角指令値134になるように治療用放射線照射装置16を駆動する。
【0082】
治療用放射線照射装置動作制御装置131は、チルト角センサ61とパン角センサ51とにより測定される測定結果が十分に高精度であるときに、チルト軸駆動装置68をより高精度に制御することができ、パン軸駆動装置67をより高精度に制御することができる。すなわち、放射線治療装置3は、チルト角センサ61とパン角センサ51とにより測定される測定結果が十分に高精度であるときに、係数演算部122と乗算器123とを備えない周知の治療用放射線照射装置動作制御装置131が適用されることもできる。
【0083】
なお、既述の実施の形態における治療用放射線照射装置動作制御装置5は、チルト軸駆動装置68が備えるロータリーエンコーダを首振り位置検出装置として用い、その測定結果を用いてチルト軸駆動装置68を制御することができ、または、パン軸駆動装置67が備えるロータリーエンコーダを首振り位置検出装置として用い、その測定結果を用いてパン軸駆動装置67を制御することができる。このとき、治療用放射線照射装置動作制御装置5は、パン角センサ51とチルト角センサ61とを用いるときと同様にして、チルト軸駆動装置68をより高精度に制御することができ、パン軸駆動装置67をより高精度に制御することができる。
【0084】
既述の実施の形態における治療用放射線照射装置動作制御装置5は、さらに、パンフレーム46がガントリ走行フレーム45に対して平行移動するように駆動され、チルトフレーム47がパンフレーム46に対して平行移動するように駆動される放射線治療装置に適用されることができる。このとき、治療用放射線照射装置動作制御装置5は、既述の実施の形態における放射線治療装置3に適用されたときと同様にして、目標位置と位置センサ値との位置偏差が大きいときに操作量を小さくすることができ、パンフレーム46とチルトフレーム47とを安定して駆動させることができ、パンフレーム46とチルトフレーム47とをより高精度に駆動することができる。
【図面の簡単な説明】
【0085】
【図1】図1は、放射線治療システムを示すブロック図である。
【図2】図2は、本発明による放射線治療装置を示す斜視図である。
【図3】図3は、首振り機構を示す斜視図である。
【図4】図4は、パン角センサを示す平面図である。
【図5】図5は、チルト角センサを示す平面図である。
【図6】図6は、本発明による治療用放射線照射装置動作制御装置を示すブロック図である。
【図7】図7は、目標位置の変化を示し、補正後指令値の変化を示すグラフである。
【図8】図8は、D/A変換回路の入力と出力の関係を示すグラフである。
【図9】図9は、操作量算出部を示すブロック図である。
【図10】図10は、位置偏差と係数との関係を示すグラフである。
【図11】図11は、他の治療用放射線照射装置動作制御装置を示すブロック図である。
【符号の説明】
【0086】
1 :放射線治療システム
2 :放射線治療装置制御装置
3 :放射線治療装置
5 :治療用放射線照射装置動作制御装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り機構
16:治療用放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:MLC(マルチリーフコリメータ)
21:チルト軸
22:パン軸
23:治療用放射線
24:診断用X線源
25:診断用X線源
31:センサアレイ
32:センサアレイ
33:センサアレイ
35:診断用X線
36:診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
45:ガントリ走行フレーム
46:パンフレーム
47:チルトフレーム
51:パン角センサ
52:パン角センサ本体
54:パン角スケール部分
55:パン角スケール
61:チルト角センサ
62:チルト角センサ本体
63:支持部分
64:チルト角スケール部分
65:チルト角スケール
67:パン軸駆動装置
68:チルト軸駆動装置
69:温度計
71:たわみ補正量算出部
72:加算器
73:ランプ処理部
74:加算器
76:加算器
77:加算器
78:首振り位置制御部
79:ノッチフィルタ
80:フィードフォワード部
81:温度ドリフト補正部
82:加算器
83:D/A変換回路
84:アンプ
85:ドライバ
91:指令値
92:Oリング軸指令値とガントリ軸指令値との組
93:たわみ補正量
94:補正後指令値
95:ランプ処理補正量
96:目標位置値
97:位置センサ値
98:原点オフセット値
99:位置実績値
100:位置偏差
101:操作量
102:補正後操作量
103:フィードフォワード操作量
104:温度ドリフト補正量
105:操作量
106:制御電気信号
107:制御電気信号
108:駆動電気信号
109:変化
110:変化
111:関係
112:最大値
113:最小値
114:値
115:値
121:操作量算出部
122:係数演算部
123:乗算器
124:操作量
125:係数
126:関係
131:治療用放射線照射装置動作制御装置
132:加算器
133:操作量算出器
134:指令値
135:位置センサ値
136:位置偏差
137:操作量
138:ドライバ/モータ
【特許請求の範囲】
【請求項1】
治療用放射線を出射する放射線照射装置をフレームに対して駆動する駆動装置を備える放射線治療装置において、
目標位置と前記放射線照射装置の位置との位置偏差を、目標位置と位置検出センサにより測定された位置センサ値とに基づいて算出する演算器と、
前記位置偏差に基づいて係数を算出する係数演算部と、
補正前操作量に前記係数を乗算して補正後操作量を算出する乗算器とを具備し、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて、前記フレームに対して前記放射線照射装置が前記目標位置に配置されるように、制御される
治療用放射線照射装置動作制御装置。
【請求項2】
請求項1において、
前記目標位置は、前記治療用放射線の照射位置が照射対象の位置に合致するように、かつ、前記治療用放射線が前記照射対象に追従するように、算出される
治療用放射線照射装置動作制御装置。
【請求項3】
請求項2において、
前記位置偏差に基づいて前記補正前操作量を算出する操作量算出部
を更に具備する治療用放射線照射装置動作制御装置。
【請求項4】
請求項1〜請求項3のいずれかにおいて、
本治療用放射線照射装置動作制御装置により前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出する温度ドリフト補正部を更に具備し、
前記駆動装置は、前記温度ドリフト量に更に基づいて制御される
治療用放射線照射装置動作制御装置。
【請求項5】
請求項1〜請求項4のいずれかにおいて、
前記放射線治療装置は、異なる2軸以上の軸に対して前記放射線照射装置が移動可能な機構を有しており、
前記駆動装置は、前記軸の各軸の移動を各々独立に制御を行う
治療用放射線照射装置動作制御装置。
【請求項6】
請求項5において、
当該移動動作は、当該軸を中心とした前記放射線照射装置の回転動作である、
治療用放射線照射装置動作制御装置。
【請求項7】
請求項6において、
前記位置検出センサの少なくとも一つは、
前記フレームまたは前記放射線照射装置の一方に固定されるセンサ本体と、
前記フレームまたは前記放射線照射装置の他方に固定されるスケール部分とを備え、
前記スケール部分は、前記軸の1つを中心とする円弧に沿って配置されるスケールが形成され、
前記センサ本体は、前記スケールを観測することにより、前記フレームに対する前記放射線照射装置の位置を測定する
治療用放射線照射装置動作制御装置。
【請求項8】
請求項7において、
前記放射線治療装置は、前記フレームを移動可能に支持する他のフレームを更に備え、
前記位置検出センサは、
前記フレームまたは前記他のフレームの一方に固定される他のセンサ本体と、
前記フレームまたは前記他のフレームの他方に固定される他のスケール部分とを備え、
前記他のスケール部分は、前記軸の他の1つを中心とする円弧に沿って配置される他のスケールが形成され、
前記他のセンサ本体は、前記他のスケールを観測することにより、前記他のフレームに対する前記フレームの位置を測定する
治療用放射線照射装置動作制御装置。
【請求項9】
請求項1〜請求項8のいずれかに記載される治療用放射線照射装置動作制御装置と、
前記放射線治療装置と、
前記放射線治療装置を制御する放射線治療装置制御装置と、
を具備する放射線治療システム。
【請求項10】
治療用放射線を出射する放射線照射装置をフレームに対して駆動する駆動装置を備える放射線治療装置
を制御する治療用放射線照射装置動作制御方法において、
目標位置と前記放射線照射装置の位置との位置偏差を、目標位置と位置検出センサにより測定された位置センサ値とに基づいて算出するステップと、
前記位置偏差に基づいて係数を算出するステップと、
補正前操作量に前記係数を乗算して補正後操作量を算出するステップとを具備し、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて、前記フレームに対して前記放射線照射装置が前記目標位置に配置されるように、制御される
治療用放射線照射装置動作制御方法。
【請求項11】
請求項10において、
前記目標位置は、前記治療用放射線の照射位置が照射対象の位置に合致するように、かつ、前記治療用放射線が前記照射対象に追従するように、算出される
治療用放射線照射装置動作制御方法。
【請求項12】
請求項11において、
前記位置偏差に基づいて前記補正前操作量を算出するステップ
を更に具備する治療用放射線照射装置動作制御方法。
【請求項13】
請求項10〜請求項12のいずれかにおいて、
本治療用放射線照射装置動作制御方法により前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出するステップを更に具備し、
前記駆動装置は、前記温度ドリフト量に更に基づいて制御される
治療用放射線照射装置動作制御方法。
【請求項14】
請求項10〜請求項13のいずれかにおいて、
前記放射線治療装置は、異なる2軸以上の軸に対して前記放射線照射装置が移動可能な機構を有しており、
前記駆動装置は、前記軸の各軸の移動を各々独立に制御される
治療用放射線照射装置動作制御方法。
【請求項15】
請求項14において、
当該移動動作は、当該軸を中心とした前記放射線照射装置の回転動作である、
治療用放射線照射装置動作制御方法。
【請求項16】
請求項15において、
前記位置検出センサの少なくとも一つは、
前記フレームまたは前記放射線照射装置の一方に固定されるセンサ本体と、
前記フレームまたは前記放射線照射装置の他方に固定されるスケール部分とを備え、
前記スケール部分は、前記軸の1つを中心とする円弧に沿って配置されるスケールが形成され、
前記センサ本体は、前記スケールを観測することにより、前記フレームに対する前記放射線照射装置の位置を測定する
治療用放射線照射装置動作制御方法。
【請求項17】
請求項16において、
前記放射線治療装置は、前記フレームを移動可能に支持する他のフレームを更に備え、
前記位置検出センサは、
前記フレームまたは前記他のフレームの一方に固定される他のセンサ本体と、
前記フレームまたは前記他のフレームの他方に固定される他のスケール部分とを備え、
前記他のスケール部分は、前記軸の他の1つを中心とする円弧に沿って配置される他のスケールが形成され、
前記他のセンサ本体は、前記他のスケールを観測することにより、前記他のフレームに対する前記フレームの位置を測定する
治療用放射線照射装置動作制御方法。
【請求項18】
治療用放射線を出射する放射線照射装置をフレームに対して回転させる駆動装置と、
前記フレームに対して前記放射線照射装置が配置される角度位置センサ値を測定する首振り位置検出装置と、
前記角度位置センサ値に基づいて前記駆動装置を制御する治療用放射線照射装置動作制御装置とを具備し、
前記首振り位置検出装置は、
前記フレームまたは前記放射線照射装置の一方に固定されるセンサ本体と、
前記フレームまたは前記放射線照射装置の他方に固定されるスケール部分とを備え、
前記スケール部分は、前記回転軸を軸とする円柱の側面に沿って配置されるスケールが形成され、
前記センサ本体は、前記スケールを観測することにより、前記フレームに対する前記放射線照射装置の前記角度位置センサ値を測定する
放射線治療装置。
【請求項19】
請求項18において、
前記フレームを移動可能に支持する他のフレームと、
他の位置検出センサとをさらに具備し、
前記他の位置検出センサは、
前記フレームまたは前記他のフレームの一方に固定される他のセンサ本体と、
前記フレームまたは前記他のフレームの他方に固定される他のスケール部分とを備え、
前記他のスケール部分は、前記軸の他の1つを中心とする円弧に沿って配置される他のスケールが形成され、
前記他のセンサ本体は、前記他のスケールを観測することにより、前記他のフレームに対する前記フレームの位置を示す他の角度位置センサ値を出力し、
前記治療用放射線照射装置動作制御装置は、前記他の角度位置センサ値にさらに基づいて前記駆動装置を制御する
放射線治療装置。
【請求項1】
治療用放射線を出射する放射線照射装置をフレームに対して駆動する駆動装置を備える放射線治療装置において、
目標位置と前記放射線照射装置の位置との位置偏差を、目標位置と位置検出センサにより測定された位置センサ値とに基づいて算出する演算器と、
前記位置偏差に基づいて係数を算出する係数演算部と、
補正前操作量に前記係数を乗算して補正後操作量を算出する乗算器とを具備し、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて、前記フレームに対して前記放射線照射装置が前記目標位置に配置されるように、制御される
治療用放射線照射装置動作制御装置。
【請求項2】
請求項1において、
前記目標位置は、前記治療用放射線の照射位置が照射対象の位置に合致するように、かつ、前記治療用放射線が前記照射対象に追従するように、算出される
治療用放射線照射装置動作制御装置。
【請求項3】
請求項2において、
前記位置偏差に基づいて前記補正前操作量を算出する操作量算出部
を更に具備する治療用放射線照射装置動作制御装置。
【請求項4】
請求項1〜請求項3のいずれかにおいて、
本治療用放射線照射装置動作制御装置により前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出する温度ドリフト補正部を更に具備し、
前記駆動装置は、前記温度ドリフト量に更に基づいて制御される
治療用放射線照射装置動作制御装置。
【請求項5】
請求項1〜請求項4のいずれかにおいて、
前記放射線治療装置は、異なる2軸以上の軸に対して前記放射線照射装置が移動可能な機構を有しており、
前記駆動装置は、前記軸の各軸の移動を各々独立に制御を行う
治療用放射線照射装置動作制御装置。
【請求項6】
請求項5において、
当該移動動作は、当該軸を中心とした前記放射線照射装置の回転動作である、
治療用放射線照射装置動作制御装置。
【請求項7】
請求項6において、
前記位置検出センサの少なくとも一つは、
前記フレームまたは前記放射線照射装置の一方に固定されるセンサ本体と、
前記フレームまたは前記放射線照射装置の他方に固定されるスケール部分とを備え、
前記スケール部分は、前記軸の1つを中心とする円弧に沿って配置されるスケールが形成され、
前記センサ本体は、前記スケールを観測することにより、前記フレームに対する前記放射線照射装置の位置を測定する
治療用放射線照射装置動作制御装置。
【請求項8】
請求項7において、
前記放射線治療装置は、前記フレームを移動可能に支持する他のフレームを更に備え、
前記位置検出センサは、
前記フレームまたは前記他のフレームの一方に固定される他のセンサ本体と、
前記フレームまたは前記他のフレームの他方に固定される他のスケール部分とを備え、
前記他のスケール部分は、前記軸の他の1つを中心とする円弧に沿って配置される他のスケールが形成され、
前記他のセンサ本体は、前記他のスケールを観測することにより、前記他のフレームに対する前記フレームの位置を測定する
治療用放射線照射装置動作制御装置。
【請求項9】
請求項1〜請求項8のいずれかに記載される治療用放射線照射装置動作制御装置と、
前記放射線治療装置と、
前記放射線治療装置を制御する放射線治療装置制御装置と、
を具備する放射線治療システム。
【請求項10】
治療用放射線を出射する放射線照射装置をフレームに対して駆動する駆動装置を備える放射線治療装置
を制御する治療用放射線照射装置動作制御方法において、
目標位置と前記放射線照射装置の位置との位置偏差を、目標位置と位置検出センサにより測定された位置センサ値とに基づいて算出するステップと、
前記位置偏差に基づいて係数を算出するステップと、
補正前操作量に前記係数を乗算して補正後操作量を算出するステップとを具備し、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて、前記フレームに対して前記放射線照射装置が前記目標位置に配置されるように、制御される
治療用放射線照射装置動作制御方法。
【請求項11】
請求項10において、
前記目標位置は、前記治療用放射線の照射位置が照射対象の位置に合致するように、かつ、前記治療用放射線が前記照射対象に追従するように、算出される
治療用放射線照射装置動作制御方法。
【請求項12】
請求項11において、
前記位置偏差に基づいて前記補正前操作量を算出するステップ
を更に具備する治療用放射線照射装置動作制御方法。
【請求項13】
請求項10〜請求項12のいずれかにおいて、
本治療用放射線照射装置動作制御方法により前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出するステップを更に具備し、
前記駆動装置は、前記温度ドリフト量に更に基づいて制御される
治療用放射線照射装置動作制御方法。
【請求項14】
請求項10〜請求項13のいずれかにおいて、
前記放射線治療装置は、異なる2軸以上の軸に対して前記放射線照射装置が移動可能な機構を有しており、
前記駆動装置は、前記軸の各軸の移動を各々独立に制御される
治療用放射線照射装置動作制御方法。
【請求項15】
請求項14において、
当該移動動作は、当該軸を中心とした前記放射線照射装置の回転動作である、
治療用放射線照射装置動作制御方法。
【請求項16】
請求項15において、
前記位置検出センサの少なくとも一つは、
前記フレームまたは前記放射線照射装置の一方に固定されるセンサ本体と、
前記フレームまたは前記放射線照射装置の他方に固定されるスケール部分とを備え、
前記スケール部分は、前記軸の1つを中心とする円弧に沿って配置されるスケールが形成され、
前記センサ本体は、前記スケールを観測することにより、前記フレームに対する前記放射線照射装置の位置を測定する
治療用放射線照射装置動作制御方法。
【請求項17】
請求項16において、
前記放射線治療装置は、前記フレームを移動可能に支持する他のフレームを更に備え、
前記位置検出センサは、
前記フレームまたは前記他のフレームの一方に固定される他のセンサ本体と、
前記フレームまたは前記他のフレームの他方に固定される他のスケール部分とを備え、
前記他のスケール部分は、前記軸の他の1つを中心とする円弧に沿って配置される他のスケールが形成され、
前記他のセンサ本体は、前記他のスケールを観測することにより、前記他のフレームに対する前記フレームの位置を測定する
治療用放射線照射装置動作制御方法。
【請求項18】
治療用放射線を出射する放射線照射装置をフレームに対して回転させる駆動装置と、
前記フレームに対して前記放射線照射装置が配置される角度位置センサ値を測定する首振り位置検出装置と、
前記角度位置センサ値に基づいて前記駆動装置を制御する治療用放射線照射装置動作制御装置とを具備し、
前記首振り位置検出装置は、
前記フレームまたは前記放射線照射装置の一方に固定されるセンサ本体と、
前記フレームまたは前記放射線照射装置の他方に固定されるスケール部分とを備え、
前記スケール部分は、前記回転軸を軸とする円柱の側面に沿って配置されるスケールが形成され、
前記センサ本体は、前記スケールを観測することにより、前記フレームに対する前記放射線照射装置の前記角度位置センサ値を測定する
放射線治療装置。
【請求項19】
請求項18において、
前記フレームを移動可能に支持する他のフレームと、
他の位置検出センサとをさらに具備し、
前記他の位置検出センサは、
前記フレームまたは前記他のフレームの一方に固定される他のセンサ本体と、
前記フレームまたは前記他のフレームの他方に固定される他のスケール部分とを備え、
前記他のスケール部分は、前記軸の他の1つを中心とする円弧に沿って配置される他のスケールが形成され、
前記他のセンサ本体は、前記他のスケールを観測することにより、前記他のフレームに対する前記フレームの位置を示す他の角度位置センサ値を出力し、
前記治療用放射線照射装置動作制御装置は、前記他の角度位置センサ値にさらに基づいて前記駆動装置を制御する
放射線治療装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−131270(P2010−131270A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−311580(P2008−311580)
【出願日】平成20年12月5日(2008.12.5)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月5日(2008.12.5)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]