
波形観測装置及び方法
【課題】移動体を対象とした反射パルスの波形を高精度で観測することができる波形観測装置を提供する。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁波パルスを用いて対象までの距離、相対速度、対象の反射係数等を計測する波形観測装置及び方法に関する。
【背景技術】
【0002】
テラヘルツ時間領域分光法において、テラヘルツパルス発生用ポンプ光に対して、測定時間窓となるテラヘルツ検出用プローブ光を時間遅延走査させるのに、機械的ステージを用いることなく、2台のフェムト秒レーザ光源を用いる分光計測装置が知られている(例えば、特許文献1)。
【0003】
この分光計測装置によれば、ポンプ光用フェムト秒レーザのパルス周期と、プローブ光用フェムト秒レーザのパルス周期とをそれぞれ高度に安定化させながら、互いに僅かに異ならせる。これにより両パルス間の時間遅延タイミングは、パルス毎に自動的にずれていくために、機械的ステージを用いることなく、時間的に拡大されたテラヘルツ・パルスが高速サンプリング測定されるので、高分解・高速測定することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】国際公開第2006/092874号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の分光計測装置によれば、2台のフェムト秒レーザのパルス周期の差を一定値に保持するようにパルス繰り返し周波数の周波数制御を行う必要があるため、計測対象が移動する場合、高精度で波形を計測することができないという問題点があった。
【課題を解決するための手段】
【0006】
上記問題点を解決するために本発明は、パルス送信の繰り返し周波数を発振し、前記繰り返し周波数でパルスを発生させ、発生したパルスを計測対象へ送信し、計測対象から反射したパルスを受信し、受信されたパルスの波形を取得する波形観測装置において、計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定することを要旨とする波形観測装置である。
【発明の効果】
【0007】
本発明によれば、計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定することができるので、相対関係が変化する移動体を計測対象とした反射パルスの波形を高精度で観測することができるという効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明に係る波形観測装置の実施形態の構成を示すブロック図である。
【図2】図1におけるパルス送信器4の詳細例を説明する斜視図である。
【図3】図1におけるパルス受信器8の詳細例を説明する斜視図である。
【図4】実施形態における周波数パタンの例を示す図である。
【図5】実施形態における周波数切り替えパタンの例を示す図である。
【図6】実施形態の波形観測装置の動作を説明するフローチャートである。
【発明を実施するための形態】
【0009】
次に図面を参照して、本発明の実施の形態を詳細に説明する。尚、以下に説明する実施形態は、電磁波パルスの周波数として、テラヘルツ波(0.1THz〜10THz、1THz=1012 Hz)を用いた実施形態である。テラヘルツ波は、電波と光との境界領域の電磁波であり、電波と光の双方の性質を有する。
【0010】
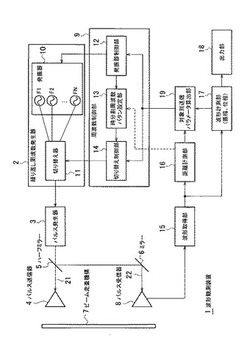
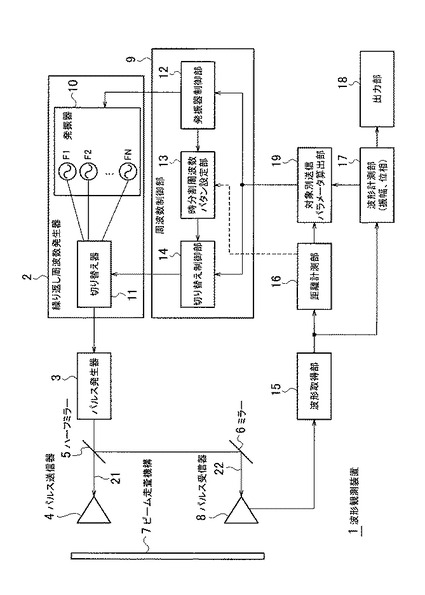
図1は、本発明に係る波形観測装置の実施形態の構成を示すブロック図である。図1において、波形観測装置1は、パルスの繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数発生器2が発生した繰り返し周波数で100fs(1fs=10-15 s)程度のパルス幅を有するフェムト秒パルス光を発生するフェムト秒パルスレーザを用いたパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して計測対象へ送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、送受信テラヘルツパルス波の方向を走査するビーム走査機構7と、計測対象で反射したテラヘルツパルス波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2の周波数を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
【0011】
繰り返し周波数発生器2は、複数の周波数F1,F2,…,FNを発振する発振器10と、発振器10が発振した周波数を切り替えて出力する切り替え器11とを備える。
【0012】
周波数制御部9は、発振器10を制御する発振器制御部12と、時分割周波数パタン設定部13と、切り替え器11を制御する切り替え制御部14とを備える。
【0013】
パルス発生器3は、例えば、チタン添加サファイアレーザ(Ti:Al2O3)を用いると、パルス幅12〜100fs,パルス繰り返し周波数10〜80MHz,出力500mW〜2Wが得られる。また、パルス発生器3として、ファイバーレーザを用いると、パルス幅502〜100fs,パルス繰り返し周波数10〜50MHz,出力30〜300mWが得られる。
【0014】
パルス発生器3が発生するパルス光の波長は、フェムト秒パルス光をテラヘルツ波に変換する半導体基板(例えば、GaAs)のバンドギャップ(GaAsの場合、Eg=1.42eV)に相当する光の波長以下であり、図2を参照して後述するLT−GaAs基板にフォトキャリアを励起することができる波長である。
【0015】
波形取得部15は、パルス受信器8が受信したテラヘルツパルス波の波形を合成する。パルス受信器8は、テラヘルツパルス波を後述するタイムゲートでサンプリングした振幅サンプル値を順次出力するので、波形取得部8は、各振幅サンプル値を繋げてテラヘルツパルス波の受信波形を合成する。
【0016】
距離計測部16は、波形取得部15が取得した受信波形に基づいて、計測対象までの距離(dgd)を計測する。波形計測部17は、波形取得部15が取得した受信波形の振幅値、波形形状、及び位相を計測し、出力部18へ出力する。出力部18は、波形計測部17が計測した受信波形の振幅値、波形形状、及び位相を図示しない上位装置へ出力する。
【0017】
対象別送信パラメータ算出部19は、距離計測部16で計測した距離が異なるそれぞれの対象物別に、繰り返し周波数発生器2が発生する繰り返し周波数のパラメータを算出し、算出したパラメータを周波数制御部9へ出力する。周波数制御部9は、対象別送信パラメータ算出部19から入力したパラメータに従って、発振器10及び切り替え器11を制御する。この結果、パルス発生器3が発生するパルスの繰り返し周波数が制御され、ひいては、パルス送信器4が計測対象へ送信するテラヘルツパルス波の繰り返し周波数が制御される。
【0018】
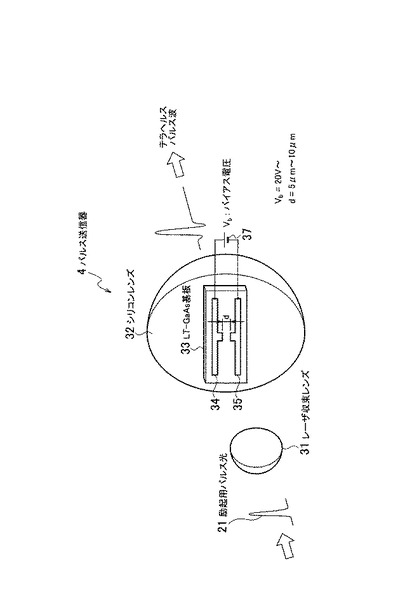
図2は、パルス送信器4の詳細例を説明する斜視図である。パルス送信器4は、励起用パルス光21を収束させるレーザ収束レンズ31と、発生したテラヘルツパルス波を収束させるシリコンレンズ32と、低温成長させたGaAs基板であるLT−GaAs基板33と、アンテナ給電線を兼ねる一対の電極34,35とを備えている。電極34,35との間のギャップの幅dは、例えば5μm〜10μmであり、その電極は微小ダイポールアンテナとして作用する。電極34,35間にバイアス電圧Vb(DC〜10kHz,20V程度)を供給するバイアス37が接続されている。この電極34,35のギャップへ励起用パルス光21を照射すると、GaAsの光電効果によりフォトキャリアが生成され、さらにバイアス37の印加電圧によってフォトキャリアが加速されるため、瞬時電流が流れる。この電流の時間微分に比例した電磁波(ETHz(t)∝∂J/∂t)が電極34,35にテラヘルツパルス波として発生し、シリコンレンズ32により放射される。LT−GaAs基板33の条件は、キャリア寿命が数psであることが好ましい。
【0019】
このように、パルス送信器4が送信する電磁波パルスの周波数帯域をテラヘルツ波(0.1THz〜10THz、1THz=1012 Hz)としたので、揺動するプリズムやポリゴンミラー等の光学的な走査機構をビーム走査機構7に用いることができるようになり、比較的簡単な機構によりテラヘルツパルス波の放射方向を走査することができるという効果がある。
【0020】
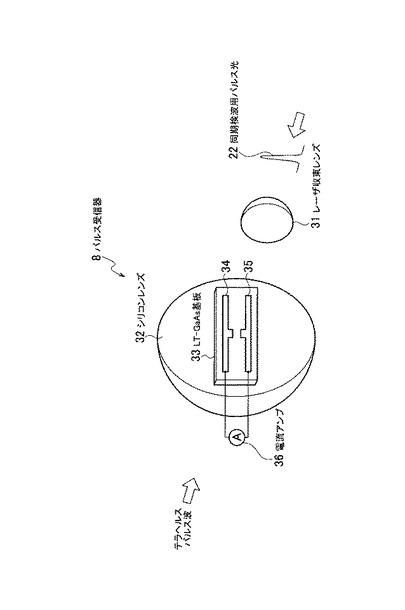
図3は、パルス受信器8の詳細例を説明する斜視図である。パルス受信器8は、パルス送信器4と基本的に同じ構造のものを用いる。パルス送信器4との相違は、電極34,35間にバイアス37を接続する代わりに、電流アンプ36が接続されていることである。パルス受信器8において、LT−GaAs基板33上の電極34,35は、同様にその電極間に例えば5〜10μmの幅を有しており、その電極はテラヘルツ波帯で動作する微小ダイポールアンテナとして作用する。レーザ収束レンズ31で収束された同期検波用パルス光22を受光してフォトキャリアが生成されたときに、シリコンレンズ32で収束されたテラヘルツ波が入射すると、テラヘルツ波の電界がダイポールアンテナに生じる光電流に変換されてテラヘルツパルス波を受信することができる。これは、テラヘルツ波形を検出するために同期検波用パルス光で同期検波を行っていることになる。
【0021】
ここで同期検波の原理を説明する。同期検波用パルス光22のパルス幅が例えば300fsのとき、すなわちタイムゲートは300fsより短い時間(30fs程度の分解能)で同期検波をすることができる。テラヘルツパルス波のパルス幅をたとえば1000fsと設定した場合、送信パルスの繰り返し周波数を少しずつ変化させることによりタイムゲートを少しずつ遅延させてサンプリングする。こうしてサンプリングした各サンプル点をつなげることにより、テラヘルツパルス波の波形を観測することができる。この技術は、テラヘルツ時間領域分光法(TDS)と呼ばれている。
【0022】
次に、図1〜図5を参照して、波形観測装置1の動作を説明する。まず以下の説明で使用する記号を定義する。
【0023】
d1:最小検知距離
d2:最大検知距離
dgd:物体検知距離(計測対象物までの距離)
dmin :検知分解能(通常、システム要求により定まる)
F:パルスの繰り返し周波数
c:光速
Nitg :サンプリング点数(通常、波形観測の場合には、1000と設定する)
次いで、波形観測装置1がパルス送信する繰り返し周波数の変化パタンをパタン1からパタン3まで定義する。パタン1は、対象物までの距離を計測して、物体検知距離dgdを取得するための周波数変化パタンである。パタン2は、物体検知距離dgdを取得した後、距離dgdにある対象物からの精密な反射波形を取得するための周波数変化パタンである。パタン3は、移動体検知用の周波数パタンであり、パルス送信の繰り返し周期に相当する時間内に、物体検知距離dgdを取得済みの計測対象が移動可能性のある距離Δdmに基づいて、周波数を変化させるパタンである。
【0024】
波形観測装置1が動作を開始すると、最初にパルス送信の繰り返し周波数をパタン1で変化させる。このパタン1では、最大検知距離d2から最小検知距離d1の間に、計測対象物があるか否かと、計測対象物があれば、計測対象物までの距離dgdを求めるために使用する。
【0025】
波形観測装置1から距離dに存在する計測対象物まで、テラヘルツパルス波が往復する時間は、2・d/cである。従って、2・d/cの周期でパルス発生器3がフェムト秒パルス光を発生すると、計測対象物で反射したテラヘルツパルス波がパルス受信器8に入射するタイミングで、次のフェムト秒パルス光がハーフミラー5,ミラー6で反射されて同期検波用パルス22としてパルス受信器8へ入射することができる。
【0026】
従って、パタン1では、次に示す式(1)、(2)で示される初期周波数Fsと終端周波数Feとの間で連続的に周波数を変化させるように、周波数制御部9が繰り返し周波数発生器2を制御する。これにより、最小検知距離d1と最大検知距離d2との間に計測対象物が存在すると、物体検知距離dgdが取得される。
【数1】

【0027】
距離計測部16は、時分割周波数パタン設定部13を制御して、式(1)、(2)で示される初期周波数Fsと終端周波数Feとの間で連続的に周波数を変化させながら、波形取得部15が取得した波形を監視する。そして、波形が取得されたタイミングの周波数から、波形観測装置1と計測対象物までの距離である物体検知距離dgdを算出する。距離計測部16は、算出した物体検知距離dgdを対象別送信パラメータ算出部19へ出力する。
【0028】
物体検知距離dgdが取得されると、次いで、波形観測装置1は、計測対象物からの精密な反射波形を観測するために、パタン2でパルス送信する。パタン2では、物体検知距離dgdの前後に、検知分解能dmin ×サンプリング点数Nitg/2の幅を検出範囲とする。従って、パタン2における初期周波数Fsは、式(3)となり、終端周波数Feは、式(4)となる。
【数2】
【0029】
また、繰り返し周波数にそれぞれ周波数変調を行う際の変調周波数ΔFは、検知分解能dmin と、変調周期Tsrch、周波数変調の初期周波数f0、周波数変調の終端周波数f1,サンプリング取得数Nitg 、各サンプル蓄積数Nsum 、サンプリング周波数Fspl で決定され、例えば、次に示す式(5)と決まり、検知分解能dmin と、サンプリング周波数Fspl に基づいて、変調周波数ΔFが決定される。
【数3】
【0030】
パタン3は、物体検知距離dgdが取得された計測対象物のサンプリング時間内に移動可能性のある距離Δdmを考慮した繰り返し周波数の変化方法であり、式(6)、(7)を参照して後述する。
【0031】
切り替え制御部14は、パタン1からパタン3までの複数の周波数パタンを所定の時間内(例えば、10μs)で切り替えながら、周波数選択するように、切り替え器11へ指示する。このように本実施形態の波形観測装置1は、計測対象との距離、相対速度、反射係数などの計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定しているので、計測対象が移動する場合であっても、高精度に波形を観測することができるという効果がある。
【0032】
なお、個々の周波数パタンの計測時間は、標準1μsで、周波数多重数は、5個(切り替え時間は1μs)とする。なお、切り替え制御部14は、時分割周波数パタン設定部13からの指示を優先し、物体検知距離dgdが検出された物体の精密測定を行う場合には、対象別送信パラメータ算出部19の指示により動作する。
【0033】
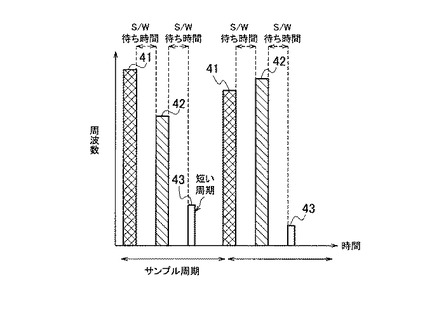
図4は、切り替え制御部14による周波数選択制御の例を示す図である。図中の符号41,42,43がそれぞれの周波数パタンを示している。
【0034】
対象別送信パラメータ算出部19は、物体検知距離dgdにおける周波数変調方法として、物体検知距離ddgのサンプリング時間内における計測対象が移動可能性のある距離(以下、移動可能距離Δdm)を相対速度とサンプリング時間との積により推定する。尚、相対速度は、物体検知距離ddgのサンプリング時間における変化により求めることができるが、精度を高めるために、複数値の平均から算出してもよい。
【0035】
そして移動可能距離をΔdmとしたときに、例えば、次に示す式(6)、式(7)で示される初期周波数Fsから終端周波数Feの間で周波数変調するように、周波数制御部9へ指示を送信する。この周波数パタンをパタン3と呼ぶ。
【数4】
【0036】
パタン3では、計測対象の移動可能距離を考慮してパルス送信の繰り返し周波数を補正しているために、一旦検出した移動体の位置を追跡する場合に、パタン1やパタン2よりも周波数変調帯域を減少できるため、短時間で物体検知距離dgdを検知することができるという効果がある。また計測対象のテラヘルツパルス波の反射係数が低く、結果としてパルス受信器8の出力が弱い場合には、積分を増やすため、切り替え器11へ送信時間を調節する。たとえば、初期切り替え待機時間1μsで、パルス発生器3のパルス発生周期が10ns(同期周波数が10MHz)とすると、100サンプリング可能である。このとき、例えば受信信号に十分な振幅が得られない場合は、待機時間を変更することで、サンプリング数を増加することでS/Nを向上させることができる(図4)。従って、テラヘルツパルス波の反射係数が低い計測対象も正確に検出することができるという効果がある。生成した周波数パタンは、発振器制御部12及び切り替え制御部14へ出力する。
【0037】
時分割周波数パタン設定部13は、切り替え制御部14と発振器制御部12、距離計測部16の計測対象までの距離と、時間差分による相対速度と周波数パタンの関連性に基づいて波形計測に関する周波数パタン(パタン2及びパタン3)の切り替え方法を決定する。
【0038】
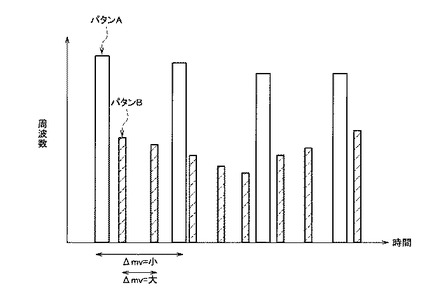
計測対象に応じた検知分解能でサンプリングを行うため、計測対象が移動する場合は相対速度も含めて制御する。例えば、波形観測装置1に対して計測対象が相対速度v=10km/h(2.7m/s)で移動している場合、検知分解能dres の距離を移動する時間は、Δmv=dres /vとなる。
【0039】
各周波数パタン(パタン2、パタン3)は、Δmvの間隔以下でサンプリングする必要がある。例えば図5のように周波数を切り替えるとよい。図5に示すパタンA(パタン2、パタン3のいずれでもよい)は相対速度が小さく、サンプリング周期がゆっくりでよく、積分時間を長く取る特徴が必要なもの、パタンB(パタン2、パタン3のいずれでもよい)は相対速度が大きいためサンプリング周期が早く、積分時間は短くて良いものを示している。制御を簡単にするために、図5に示すように、複数の周波数パタンと必要サンプリング周期のもっとも短い周期に合わせて多重化しても良い。以上のように、時分割周波数パタン設定部13は、各周波数パタンの時間切り替え方法を切り替え制御部14へ送信する。
【0040】
このように対象別送信パラメータ算出部19と時分割周波数パタン設定部13と周波数制御部9とが協働して、計測対象までの距離、計測対象との相対速度、及び計測対象の反射係数の計算結果に基づいて、発振器10が発振するパルス送信の繰り返し周波数の、多重数、変調周波数帯域、及び変調時間を設定しているので、計測対象が移動体であっても高精度な波形観測を行うことができるという効果がある。
【0041】
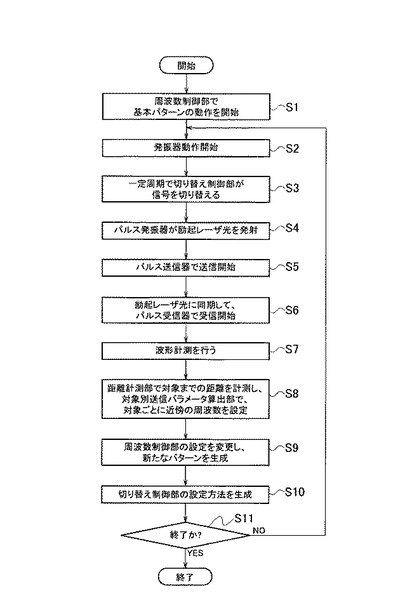
図6は、実施形態における波形観測装置1の動作を通して説明するフローチャートである。まず、ステップ(以下、ステップをSと略す)1において、発振器制御部12から基本パタン(パタン1、及びパタン2)を発振器10のF1〜F2に送信する。次いで、S2において、発振器10がパルス発生の繰り返し周波数の発振動作(F1,F2)を開始する。次いで、S3において、切り替え器11が発振器10の信号を切り替えてパルス発生器3へ出力する。
【0042】
次いでS4において、パルス発生器3からフェムト秒パルス光を発射する。S5において、パルス送信器4がテラヘルツパルス波を送信する動作を開始し、波形観測装置1から計測対象へテラヘルツパルス波を送信する。送信されたテラヘルツパルス波は、計測対象で反射され、波形観測装置1に戻ってくる。
【0043】
次いでS6において、パルス発生器3が発射するフェムト秒パルス光に同期して、パルス受信器8がテラヘルツパルス波の受信動作を開始する。次いでS7において、波形取得部15で波形計測を行う。次いでS8において、距離計測部16が計測対象までの距離算出を行い、対象別送信パラメータ算出部19に基づいて、周波数パタンとしてパタン3を生成する。
【0044】
次いでS9において、対象別送信パラメータ算出部19の出力に基づいて、発振器制御部12の設定を変更し、新たなパタンを生成する。
【0045】
S10において、時分割周波数パタン設定部13において、切り替えタイミングの設定方法を算出し、切り替え制御部14において、時分割周波数パタン設定部13と対象別送信パラメータ算出部19の出力にしたがって、生成された新たな周波数パタン切り替え方法で、次回動作時の切り替えを行う。S11において、動作を継続する場合はS2へ戻り、そうでなければ終了する。
【0046】
次に、本発明に係る波形観測装置の適用事例を説明する。例えば本実施形態の波形観測装置を空港セキュリティ用途に用いた場合は、検知距離が確定でき、最小検知距離d1は、設置高さや人の最高身長、最大検知距離d2はセキュリティ監視エリアの大きさで例えば30mとする。また、検知分解能dmin は、爆薬物検査を行う場合は細かい分解能による波形観測と周波数変換が必要なため、10μm、人の移動可能性のある領域は歩行者の移動可能速度程度とすると、必要な周波数変調のパラメータが決定される。さらに個々の測定対象物(ターゲット)を統合することで、周波数パタンを決定できる。
【0047】
また、本実施形態の波形観測装置を車両等の製品組立工場に用いた場合は、工場ラインでの一工程において、塗装や鉄板、プラスチック等のボディの空隙や劣化、亀裂検査、可動系の部品にかかる金属磨耗等にテラヘルツパルス波を利用することが考えられ、その場合においても計測対象の位置や速度等はほぼ一定であること多いことが考えられる。さらに車型に応じた周波数選択を行うことで検査が高速に行える。
【0048】
また、本実施形態の波形観測装置を車両周囲センサに用いた場合は、前方を検出する場合は検知距離及び相対速度が可変となる。本原理の特徴からなるべくエリアおよび周波数変調幅を絞った方が利用効率が高くなるため、計測対象までの距離と相対速度、加速度に応じて移動可能性のある領域Δdmを絞って計測する。路面を検出する場合は検知距離がほぼ一定であり、本手法をもちいると計測範囲及び相対速度の領域が小さくなり、簡易な構成で素早く対象からのテラヘルツパルス波を取得することができる。
【符号の説明】
【0049】
1 波形観測装置
2 繰り返し周波数発生器
3 パルス発生器
4 パルス送信器
5 ハーフミラー
6 ミラー
7 ビーム走査機構
8 パルス受信器
9 周波数制御部
10 発振器
11 切り替え器
12 発振器制御部
13 時分割周波数パタン設定部
14 切り替え制御部
15 波形取得部
16 距離計測部
17 波形計測部
18 出力部
19 対象別送信パラメータ算出部
【技術分野】
【0001】
本発明は、電磁波パルスを用いて対象までの距離、相対速度、対象の反射係数等を計測する波形観測装置及び方法に関する。
【背景技術】
【0002】
テラヘルツ時間領域分光法において、テラヘルツパルス発生用ポンプ光に対して、測定時間窓となるテラヘルツ検出用プローブ光を時間遅延走査させるのに、機械的ステージを用いることなく、2台のフェムト秒レーザ光源を用いる分光計測装置が知られている(例えば、特許文献1)。
【0003】
この分光計測装置によれば、ポンプ光用フェムト秒レーザのパルス周期と、プローブ光用フェムト秒レーザのパルス周期とをそれぞれ高度に安定化させながら、互いに僅かに異ならせる。これにより両パルス間の時間遅延タイミングは、パルス毎に自動的にずれていくために、機械的ステージを用いることなく、時間的に拡大されたテラヘルツ・パルスが高速サンプリング測定されるので、高分解・高速測定することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】国際公開第2006/092874号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の分光計測装置によれば、2台のフェムト秒レーザのパルス周期の差を一定値に保持するようにパルス繰り返し周波数の周波数制御を行う必要があるため、計測対象が移動する場合、高精度で波形を計測することができないという問題点があった。
【課題を解決するための手段】
【0006】
上記問題点を解決するために本発明は、パルス送信の繰り返し周波数を発振し、前記繰り返し周波数でパルスを発生させ、発生したパルスを計測対象へ送信し、計測対象から反射したパルスを受信し、受信されたパルスの波形を取得する波形観測装置において、計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定することを要旨とする波形観測装置である。
【発明の効果】
【0007】
本発明によれば、計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定することができるので、相対関係が変化する移動体を計測対象とした反射パルスの波形を高精度で観測することができるという効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明に係る波形観測装置の実施形態の構成を示すブロック図である。
【図2】図1におけるパルス送信器4の詳細例を説明する斜視図である。
【図3】図1におけるパルス受信器8の詳細例を説明する斜視図である。
【図4】実施形態における周波数パタンの例を示す図である。
【図5】実施形態における周波数切り替えパタンの例を示す図である。
【図6】実施形態の波形観測装置の動作を説明するフローチャートである。
【発明を実施するための形態】
【0009】
次に図面を参照して、本発明の実施の形態を詳細に説明する。尚、以下に説明する実施形態は、電磁波パルスの周波数として、テラヘルツ波(0.1THz〜10THz、1THz=1012 Hz)を用いた実施形態である。テラヘルツ波は、電波と光との境界領域の電磁波であり、電波と光の双方の性質を有する。
【0010】
図1は、本発明に係る波形観測装置の実施形態の構成を示すブロック図である。図1において、波形観測装置1は、パルスの繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数発生器2が発生した繰り返し周波数で100fs(1fs=10-15 s)程度のパルス幅を有するフェムト秒パルス光を発生するフェムト秒パルスレーザを用いたパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して計測対象へ送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、送受信テラヘルツパルス波の方向を走査するビーム走査機構7と、計測対象で反射したテラヘルツパルス波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2の周波数を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
【0011】
繰り返し周波数発生器2は、複数の周波数F1,F2,…,FNを発振する発振器10と、発振器10が発振した周波数を切り替えて出力する切り替え器11とを備える。
【0012】
周波数制御部9は、発振器10を制御する発振器制御部12と、時分割周波数パタン設定部13と、切り替え器11を制御する切り替え制御部14とを備える。
【0013】
パルス発生器3は、例えば、チタン添加サファイアレーザ(Ti:Al2O3)を用いると、パルス幅12〜100fs,パルス繰り返し周波数10〜80MHz,出力500mW〜2Wが得られる。また、パルス発生器3として、ファイバーレーザを用いると、パルス幅502〜100fs,パルス繰り返し周波数10〜50MHz,出力30〜300mWが得られる。
【0014】
パルス発生器3が発生するパルス光の波長は、フェムト秒パルス光をテラヘルツ波に変換する半導体基板(例えば、GaAs)のバンドギャップ(GaAsの場合、Eg=1.42eV)に相当する光の波長以下であり、図2を参照して後述するLT−GaAs基板にフォトキャリアを励起することができる波長である。
【0015】
波形取得部15は、パルス受信器8が受信したテラヘルツパルス波の波形を合成する。パルス受信器8は、テラヘルツパルス波を後述するタイムゲートでサンプリングした振幅サンプル値を順次出力するので、波形取得部8は、各振幅サンプル値を繋げてテラヘルツパルス波の受信波形を合成する。
【0016】
距離計測部16は、波形取得部15が取得した受信波形に基づいて、計測対象までの距離(dgd)を計測する。波形計測部17は、波形取得部15が取得した受信波形の振幅値、波形形状、及び位相を計測し、出力部18へ出力する。出力部18は、波形計測部17が計測した受信波形の振幅値、波形形状、及び位相を図示しない上位装置へ出力する。
【0017】
対象別送信パラメータ算出部19は、距離計測部16で計測した距離が異なるそれぞれの対象物別に、繰り返し周波数発生器2が発生する繰り返し周波数のパラメータを算出し、算出したパラメータを周波数制御部9へ出力する。周波数制御部9は、対象別送信パラメータ算出部19から入力したパラメータに従って、発振器10及び切り替え器11を制御する。この結果、パルス発生器3が発生するパルスの繰り返し周波数が制御され、ひいては、パルス送信器4が計測対象へ送信するテラヘルツパルス波の繰り返し周波数が制御される。
【0018】
図2は、パルス送信器4の詳細例を説明する斜視図である。パルス送信器4は、励起用パルス光21を収束させるレーザ収束レンズ31と、発生したテラヘルツパルス波を収束させるシリコンレンズ32と、低温成長させたGaAs基板であるLT−GaAs基板33と、アンテナ給電線を兼ねる一対の電極34,35とを備えている。電極34,35との間のギャップの幅dは、例えば5μm〜10μmであり、その電極は微小ダイポールアンテナとして作用する。電極34,35間にバイアス電圧Vb(DC〜10kHz,20V程度)を供給するバイアス37が接続されている。この電極34,35のギャップへ励起用パルス光21を照射すると、GaAsの光電効果によりフォトキャリアが生成され、さらにバイアス37の印加電圧によってフォトキャリアが加速されるため、瞬時電流が流れる。この電流の時間微分に比例した電磁波(ETHz(t)∝∂J/∂t)が電極34,35にテラヘルツパルス波として発生し、シリコンレンズ32により放射される。LT−GaAs基板33の条件は、キャリア寿命が数psであることが好ましい。
【0019】
このように、パルス送信器4が送信する電磁波パルスの周波数帯域をテラヘルツ波(0.1THz〜10THz、1THz=1012 Hz)としたので、揺動するプリズムやポリゴンミラー等の光学的な走査機構をビーム走査機構7に用いることができるようになり、比較的簡単な機構によりテラヘルツパルス波の放射方向を走査することができるという効果がある。
【0020】
図3は、パルス受信器8の詳細例を説明する斜視図である。パルス受信器8は、パルス送信器4と基本的に同じ構造のものを用いる。パルス送信器4との相違は、電極34,35間にバイアス37を接続する代わりに、電流アンプ36が接続されていることである。パルス受信器8において、LT−GaAs基板33上の電極34,35は、同様にその電極間に例えば5〜10μmの幅を有しており、その電極はテラヘルツ波帯で動作する微小ダイポールアンテナとして作用する。レーザ収束レンズ31で収束された同期検波用パルス光22を受光してフォトキャリアが生成されたときに、シリコンレンズ32で収束されたテラヘルツ波が入射すると、テラヘルツ波の電界がダイポールアンテナに生じる光電流に変換されてテラヘルツパルス波を受信することができる。これは、テラヘルツ波形を検出するために同期検波用パルス光で同期検波を行っていることになる。
【0021】
ここで同期検波の原理を説明する。同期検波用パルス光22のパルス幅が例えば300fsのとき、すなわちタイムゲートは300fsより短い時間(30fs程度の分解能)で同期検波をすることができる。テラヘルツパルス波のパルス幅をたとえば1000fsと設定した場合、送信パルスの繰り返し周波数を少しずつ変化させることによりタイムゲートを少しずつ遅延させてサンプリングする。こうしてサンプリングした各サンプル点をつなげることにより、テラヘルツパルス波の波形を観測することができる。この技術は、テラヘルツ時間領域分光法(TDS)と呼ばれている。
【0022】
次に、図1〜図5を参照して、波形観測装置1の動作を説明する。まず以下の説明で使用する記号を定義する。
【0023】
d1:最小検知距離
d2:最大検知距離
dgd:物体検知距離(計測対象物までの距離)
dmin :検知分解能(通常、システム要求により定まる)
F:パルスの繰り返し周波数
c:光速
Nitg :サンプリング点数(通常、波形観測の場合には、1000と設定する)
次いで、波形観測装置1がパルス送信する繰り返し周波数の変化パタンをパタン1からパタン3まで定義する。パタン1は、対象物までの距離を計測して、物体検知距離dgdを取得するための周波数変化パタンである。パタン2は、物体検知距離dgdを取得した後、距離dgdにある対象物からの精密な反射波形を取得するための周波数変化パタンである。パタン3は、移動体検知用の周波数パタンであり、パルス送信の繰り返し周期に相当する時間内に、物体検知距離dgdを取得済みの計測対象が移動可能性のある距離Δdmに基づいて、周波数を変化させるパタンである。
【0024】
波形観測装置1が動作を開始すると、最初にパルス送信の繰り返し周波数をパタン1で変化させる。このパタン1では、最大検知距離d2から最小検知距離d1の間に、計測対象物があるか否かと、計測対象物があれば、計測対象物までの距離dgdを求めるために使用する。
【0025】
波形観測装置1から距離dに存在する計測対象物まで、テラヘルツパルス波が往復する時間は、2・d/cである。従って、2・d/cの周期でパルス発生器3がフェムト秒パルス光を発生すると、計測対象物で反射したテラヘルツパルス波がパルス受信器8に入射するタイミングで、次のフェムト秒パルス光がハーフミラー5,ミラー6で反射されて同期検波用パルス22としてパルス受信器8へ入射することができる。
【0026】
従って、パタン1では、次に示す式(1)、(2)で示される初期周波数Fsと終端周波数Feとの間で連続的に周波数を変化させるように、周波数制御部9が繰り返し周波数発生器2を制御する。これにより、最小検知距離d1と最大検知距離d2との間に計測対象物が存在すると、物体検知距離dgdが取得される。
【数1】
【0027】
距離計測部16は、時分割周波数パタン設定部13を制御して、式(1)、(2)で示される初期周波数Fsと終端周波数Feとの間で連続的に周波数を変化させながら、波形取得部15が取得した波形を監視する。そして、波形が取得されたタイミングの周波数から、波形観測装置1と計測対象物までの距離である物体検知距離dgdを算出する。距離計測部16は、算出した物体検知距離dgdを対象別送信パラメータ算出部19へ出力する。
【0028】
物体検知距離dgdが取得されると、次いで、波形観測装置1は、計測対象物からの精密な反射波形を観測するために、パタン2でパルス送信する。パタン2では、物体検知距離dgdの前後に、検知分解能dmin ×サンプリング点数Nitg/2の幅を検出範囲とする。従って、パタン2における初期周波数Fsは、式(3)となり、終端周波数Feは、式(4)となる。
【数2】
【0029】
また、繰り返し周波数にそれぞれ周波数変調を行う際の変調周波数ΔFは、検知分解能dmin と、変調周期Tsrch、周波数変調の初期周波数f0、周波数変調の終端周波数f1,サンプリング取得数Nitg 、各サンプル蓄積数Nsum 、サンプリング周波数Fspl で決定され、例えば、次に示す式(5)と決まり、検知分解能dmin と、サンプリング周波数Fspl に基づいて、変調周波数ΔFが決定される。
【数3】
【0030】
パタン3は、物体検知距離dgdが取得された計測対象物のサンプリング時間内に移動可能性のある距離Δdmを考慮した繰り返し周波数の変化方法であり、式(6)、(7)を参照して後述する。
【0031】
切り替え制御部14は、パタン1からパタン3までの複数の周波数パタンを所定の時間内(例えば、10μs)で切り替えながら、周波数選択するように、切り替え器11へ指示する。このように本実施形態の波形観測装置1は、計測対象との距離、相対速度、反射係数などの計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定しているので、計測対象が移動する場合であっても、高精度に波形を観測することができるという効果がある。
【0032】
なお、個々の周波数パタンの計測時間は、標準1μsで、周波数多重数は、5個(切り替え時間は1μs)とする。なお、切り替え制御部14は、時分割周波数パタン設定部13からの指示を優先し、物体検知距離dgdが検出された物体の精密測定を行う場合には、対象別送信パラメータ算出部19の指示により動作する。
【0033】
図4は、切り替え制御部14による周波数選択制御の例を示す図である。図中の符号41,42,43がそれぞれの周波数パタンを示している。
【0034】
対象別送信パラメータ算出部19は、物体検知距離dgdにおける周波数変調方法として、物体検知距離ddgのサンプリング時間内における計測対象が移動可能性のある距離(以下、移動可能距離Δdm)を相対速度とサンプリング時間との積により推定する。尚、相対速度は、物体検知距離ddgのサンプリング時間における変化により求めることができるが、精度を高めるために、複数値の平均から算出してもよい。
【0035】
そして移動可能距離をΔdmとしたときに、例えば、次に示す式(6)、式(7)で示される初期周波数Fsから終端周波数Feの間で周波数変調するように、周波数制御部9へ指示を送信する。この周波数パタンをパタン3と呼ぶ。
【数4】
【0036】
パタン3では、計測対象の移動可能距離を考慮してパルス送信の繰り返し周波数を補正しているために、一旦検出した移動体の位置を追跡する場合に、パタン1やパタン2よりも周波数変調帯域を減少できるため、短時間で物体検知距離dgdを検知することができるという効果がある。また計測対象のテラヘルツパルス波の反射係数が低く、結果としてパルス受信器8の出力が弱い場合には、積分を増やすため、切り替え器11へ送信時間を調節する。たとえば、初期切り替え待機時間1μsで、パルス発生器3のパルス発生周期が10ns(同期周波数が10MHz)とすると、100サンプリング可能である。このとき、例えば受信信号に十分な振幅が得られない場合は、待機時間を変更することで、サンプリング数を増加することでS/Nを向上させることができる(図4)。従って、テラヘルツパルス波の反射係数が低い計測対象も正確に検出することができるという効果がある。生成した周波数パタンは、発振器制御部12及び切り替え制御部14へ出力する。
【0037】
時分割周波数パタン設定部13は、切り替え制御部14と発振器制御部12、距離計測部16の計測対象までの距離と、時間差分による相対速度と周波数パタンの関連性に基づいて波形計測に関する周波数パタン(パタン2及びパタン3)の切り替え方法を決定する。
【0038】
計測対象に応じた検知分解能でサンプリングを行うため、計測対象が移動する場合は相対速度も含めて制御する。例えば、波形観測装置1に対して計測対象が相対速度v=10km/h(2.7m/s)で移動している場合、検知分解能dres の距離を移動する時間は、Δmv=dres /vとなる。
【0039】
各周波数パタン(パタン2、パタン3)は、Δmvの間隔以下でサンプリングする必要がある。例えば図5のように周波数を切り替えるとよい。図5に示すパタンA(パタン2、パタン3のいずれでもよい)は相対速度が小さく、サンプリング周期がゆっくりでよく、積分時間を長く取る特徴が必要なもの、パタンB(パタン2、パタン3のいずれでもよい)は相対速度が大きいためサンプリング周期が早く、積分時間は短くて良いものを示している。制御を簡単にするために、図5に示すように、複数の周波数パタンと必要サンプリング周期のもっとも短い周期に合わせて多重化しても良い。以上のように、時分割周波数パタン設定部13は、各周波数パタンの時間切り替え方法を切り替え制御部14へ送信する。
【0040】
このように対象別送信パラメータ算出部19と時分割周波数パタン設定部13と周波数制御部9とが協働して、計測対象までの距離、計測対象との相対速度、及び計測対象の反射係数の計算結果に基づいて、発振器10が発振するパルス送信の繰り返し周波数の、多重数、変調周波数帯域、及び変調時間を設定しているので、計測対象が移動体であっても高精度な波形観測を行うことができるという効果がある。
【0041】
図6は、実施形態における波形観測装置1の動作を通して説明するフローチャートである。まず、ステップ(以下、ステップをSと略す)1において、発振器制御部12から基本パタン(パタン1、及びパタン2)を発振器10のF1〜F2に送信する。次いで、S2において、発振器10がパルス発生の繰り返し周波数の発振動作(F1,F2)を開始する。次いで、S3において、切り替え器11が発振器10の信号を切り替えてパルス発生器3へ出力する。
【0042】
次いでS4において、パルス発生器3からフェムト秒パルス光を発射する。S5において、パルス送信器4がテラヘルツパルス波を送信する動作を開始し、波形観測装置1から計測対象へテラヘルツパルス波を送信する。送信されたテラヘルツパルス波は、計測対象で反射され、波形観測装置1に戻ってくる。
【0043】
次いでS6において、パルス発生器3が発射するフェムト秒パルス光に同期して、パルス受信器8がテラヘルツパルス波の受信動作を開始する。次いでS7において、波形取得部15で波形計測を行う。次いでS8において、距離計測部16が計測対象までの距離算出を行い、対象別送信パラメータ算出部19に基づいて、周波数パタンとしてパタン3を生成する。
【0044】
次いでS9において、対象別送信パラメータ算出部19の出力に基づいて、発振器制御部12の設定を変更し、新たなパタンを生成する。
【0045】
S10において、時分割周波数パタン設定部13において、切り替えタイミングの設定方法を算出し、切り替え制御部14において、時分割周波数パタン設定部13と対象別送信パラメータ算出部19の出力にしたがって、生成された新たな周波数パタン切り替え方法で、次回動作時の切り替えを行う。S11において、動作を継続する場合はS2へ戻り、そうでなければ終了する。
【0046】
次に、本発明に係る波形観測装置の適用事例を説明する。例えば本実施形態の波形観測装置を空港セキュリティ用途に用いた場合は、検知距離が確定でき、最小検知距離d1は、設置高さや人の最高身長、最大検知距離d2はセキュリティ監視エリアの大きさで例えば30mとする。また、検知分解能dmin は、爆薬物検査を行う場合は細かい分解能による波形観測と周波数変換が必要なため、10μm、人の移動可能性のある領域は歩行者の移動可能速度程度とすると、必要な周波数変調のパラメータが決定される。さらに個々の測定対象物(ターゲット)を統合することで、周波数パタンを決定できる。
【0047】
また、本実施形態の波形観測装置を車両等の製品組立工場に用いた場合は、工場ラインでの一工程において、塗装や鉄板、プラスチック等のボディの空隙や劣化、亀裂検査、可動系の部品にかかる金属磨耗等にテラヘルツパルス波を利用することが考えられ、その場合においても計測対象の位置や速度等はほぼ一定であること多いことが考えられる。さらに車型に応じた周波数選択を行うことで検査が高速に行える。
【0048】
また、本実施形態の波形観測装置を車両周囲センサに用いた場合は、前方を検出する場合は検知距離及び相対速度が可変となる。本原理の特徴からなるべくエリアおよび周波数変調幅を絞った方が利用効率が高くなるため、計測対象までの距離と相対速度、加速度に応じて移動可能性のある領域Δdmを絞って計測する。路面を検出する場合は検知距離がほぼ一定であり、本手法をもちいると計測範囲及び相対速度の領域が小さくなり、簡易な構成で素早く対象からのテラヘルツパルス波を取得することができる。
【符号の説明】
【0049】
1 波形観測装置
2 繰り返し周波数発生器
3 パルス発生器
4 パルス送信器
5 ハーフミラー
6 ミラー
7 ビーム走査機構
8 パルス受信器
9 周波数制御部
10 発振器
11 切り替え器
12 発振器制御部
13 時分割周波数パタン設定部
14 切り替え制御部
15 波形取得部
16 距離計測部
17 波形計測部
18 出力部
19 対象別送信パラメータ算出部
【特許請求の範囲】
【請求項1】
パルス送信の繰り返し周波数を発振する発振器と、
前記発振器の周波数を制御する周波数制御手段と、
前記発振器による繰り返し周波数でパルスを発生させるパルス発生手段と、
パルス発生手段が発生した前記パルスを計測対象へ送信するパルス送信手段と、
計測対象から反射したパルスを受信するパルス受信手段と、
受信されたパルスの波形を取得する波形取得手段と、を備えた波形観測装置であって、
前記周波数制御手段は、計測対象との相対関係に基づいて、前記発振器が発振する周波数のパラメータを設定することを特徴とする波形観測装置。
【請求項2】
前記周波数制御手段は、計測対象までの距離、計測対象との相対速度および計測対象の反射係数の何れか一つ以上の算出結果に基づいて、前記発振器が発振する周波数の多重数、前記周波数の変調周波数帯域、及び変調時間の何れかを設定することを特徴とする請求項1に記載の波形観測装置。
【請求項3】
前記パルス送信の周期に相当する時間内に前記計測対象が移動可能な距離を推定する対象別送信パラメータ算出部を備え、
前記周波数制御手段は、前記移動可能な距離に基づいて前記発振器の周波数を補正することを特徴とする請求項1または請求項2に記載の波形観測装置。
【請求項4】
前記パルス送信手段が送信するパルスは、0.1THz以上10THz以下のテラヘルツ波であることを特徴とする請求項1乃至請求項3の何れか1項に記載の波形観測装置。
【請求項5】
パルス送信の繰り返し周波数を発振し、前記周波数でパルスを発生させ、該パルスを計測対象へ送信し、計測対象から反射したパルスを受信し、受信されたパルスの波形を取得する波形観測方法において、
計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定することを特徴とする波形観測方法。
【請求項1】
パルス送信の繰り返し周波数を発振する発振器と、
前記発振器の周波数を制御する周波数制御手段と、
前記発振器による繰り返し周波数でパルスを発生させるパルス発生手段と、
パルス発生手段が発生した前記パルスを計測対象へ送信するパルス送信手段と、
計測対象から反射したパルスを受信するパルス受信手段と、
受信されたパルスの波形を取得する波形取得手段と、を備えた波形観測装置であって、
前記周波数制御手段は、計測対象との相対関係に基づいて、前記発振器が発振する周波数のパラメータを設定することを特徴とする波形観測装置。
【請求項2】
前記周波数制御手段は、計測対象までの距離、計測対象との相対速度および計測対象の反射係数の何れか一つ以上の算出結果に基づいて、前記発振器が発振する周波数の多重数、前記周波数の変調周波数帯域、及び変調時間の何れかを設定することを特徴とする請求項1に記載の波形観測装置。
【請求項3】
前記パルス送信の周期に相当する時間内に前記計測対象が移動可能な距離を推定する対象別送信パラメータ算出部を備え、
前記周波数制御手段は、前記移動可能な距離に基づいて前記発振器の周波数を補正することを特徴とする請求項1または請求項2に記載の波形観測装置。
【請求項4】
前記パルス送信手段が送信するパルスは、0.1THz以上10THz以下のテラヘルツ波であることを特徴とする請求項1乃至請求項3の何れか1項に記載の波形観測装置。
【請求項5】
パルス送信の繰り返し周波数を発振し、前記周波数でパルスを発生させ、該パルスを計測対象へ送信し、計測対象から反射したパルスを受信し、受信されたパルスの波形を取得する波形観測方法において、
計測対象との相対関係に基づいて、パルス送信の繰り返し周波数のパラメータを設定することを特徴とする波形観測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−21930(P2011−21930A)
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2009−165506(P2009−165506)
【出願日】平成21年7月14日(2009.7.14)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成21年7月14日(2009.7.14)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]