
波面測定装置、波面測定方法、及びプログラム並びにX線撮像装置
【課題】 位相シフト法より少ない周期パターンからでも、窓フーリエ変換法より正確に波面情報を算出することが可能な波面測定方法、プログラムとそれを用いた波面測定装置とX線撮像装置を提供すること。
【解決手段】 波面測定装置は、光源からの光で光周期パターンを形成する光学素子140,150と、光学素子からの光を検出する複数の画素を有する検出器160と、検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段170と、を備え、被検体の情報を取得する。算出手段は、第1の光周期パターンの検出時に第1の画素が検出した検出結果と、第1の光周期パターン検出時に第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、第2の光周期パターンの検出時に第1の画素が検出した検出結果と、を用いて、1つの位置における波面情報を算出する。
【解決手段】 波面測定装置は、光源からの光で光周期パターンを形成する光学素子140,150と、光学素子からの光を検出する複数の画素を有する検出器160と、検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段170と、を備え、被検体の情報を取得する。算出手段は、第1の光周期パターンの検出時に第1の画素が検出した検出結果と、第1の光周期パターン検出時に第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、第2の光周期パターンの検出時に第1の画素が検出した検出結果と、を用いて、1つの位置における波面情報を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、波面測定装置、波面測定方法、及びそれに用いられるプログラム並びにX線撮像装置であり、特に被検体により変調された光周期パターンから波面情報を算出する、波面測定装置、波面測定方法、及びプログラム並びにX線撮像装置に関する。
【背景技術】
【0002】
光計測学では、光周期パターン(以下、単に周期パターンということがある。)の変調を解析することで被検体の情報を取得することがある。周期パターンの解析手法として、位相シフト法と窓フーリエ変換法が知られている。下記式(1)で表わすことのできる周期パターンI(x,y)を例にとり、位相シフト法と窓フーリエ変換法の概略を述べる。簡単のため、以下では1次元の周期パターンを考えるが、2次元の周期パターンも同様に考えることができる。
【0003】
【数1】

【0004】
a(x,y)はバックグラウンド周期パターン、b(x,y)は周期パターンの振幅分布、ωxは空間キャリア周波数、φ(x,y)は被検体の位相分布又は微分位相分布である。
【0005】
位相シフト法は、位相がシフトした複数の周期パターンを用いて被検体を透過した光の波面を測定し、被検体に関する情報を取得する手法であり、各画素で検出した光の強度から独立に被検体の情報が得られる点に特徴がある。例として、下記式(2)で表わされる互いに位相がシフトした3つの周期パターンから被検体の情報の抽出を考える。
【0006】
【数2】
【0007】
非特許文献1によれば、下記式(3)によって被検体の位相分布又は微分位相分布が求められる。ただし、arg[・]は[・]内の位相成分を表わす。
【0008】
【数3】
【0009】
求められる位相分布または微分位相分布は−πからπまでの間にラップ(畳み込み)された値となるため、アンラップを行う必要がある。
【0010】
このように、式(1)で表わすことのできる周期パターンの場合、3つ以上の周期パターンがあれば位相シフト法により被検体を透過した光の波面情報を算出することができ、被検体の位相分布又は微分位相分布が求められる。
【0011】
一方、窓フーリエ変換法は1つの周期パターンからでも被検体を透過した光の波面情報を算出できる点に特徴がある。窓フーリエ変換法の詳細は非特許文献2に記載されているので、この方法の概略を述べる。式(1)を下記式(4)のように変形する。
【0012】
【数4】
【0013】
窓フーリエ変換法では、周期パターンを窓関数により局所的に切り出したのち、0次スペクトルや空間キャリア周波数のフーリエ係数を求めることで被検体を透過した光の波面情報を算出する。すなわち、a(x,y)、c(x,y)、c*(x,y)は下記式(5)によって求められる。
【0014】
【数5】
【0015】
ただし、窓関数をg(x,y)、μ、νは積分変数とする。また、位相シフト法と同様に、求められる波面情報は−πからπまでの間にラップ(畳み込み)された値となるため、アンラップを行う必要がある。
【先行技術文献】
【非特許文献】
【0016】
【非特許文献1】Japanese Journal of Applied Physics,45,5254(2006)
【非特許文献2】Optis and Lasers in Engineering,45,304(2007)
【発明の概要】
【発明が解決しようとする課題】
【0017】
位相シフト法では、周期パターンが式(1)で表わされる場合、未知数が3つなので、互いに位相がシフトした周期パターンが最低で3つ必要である。さらに、2次元の周期パターンを用いて2方向における位相分布または微分位相分布を求めるためには、さらに多くの周期パターンが必要となる。
【0018】
一方、窓フーリエ変換法は1つの周期パターンから被検体の情報を得ることができるが、光の波面情報を各画素の検出結果から独立に算出しているのではなく、周辺画素の検出結果も用いて波面情報を算出している。そのため得られる波面情報の正確度が位相シフト法よりも低い。
【0019】
そこで、本発明は位相シフト法より少ない周期パターンからでも、窓フーリエ変換法より正確に波面情報を算出することが可能な波面測定方法、プログラムとそれを用いた波面測定装置とX線撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0020】
その目的を達成するために、本発明の一側面としての波面測定装置は、
光源からの光で光周期パターンを形成する光学素子と、前記光学素子からの光を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得する波面測定装置であって、前記検出器は、前記光学素子からの光で形成された第1の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンと、を検出し、前記算出手段は、前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出することを特徴とする。
【0021】
本発明のその他の側面については、以下で説明する実施の形態で明らかにする。
【発明の効果】
【0022】
本発明によれば、位相シフト法より少ない周期パターンから、窓フーリエ変換法より正確に被検体の情報を取得することが可能な波面測定方法、プログラムと、それを用いた波面測定装置とX線撮像装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】実施形態1の波面測定装置全体図。
【図2】実施形態1の波面測定方法の概念図。
【図3】実施形態2の波面測定方法の概念図。
【図4】実施例1及び2の線源格子の模式図。
【図5】実施例1及び2の位相格子の模式図。
【図6】実施例1及び2の遮蔽格子の模式図。
【図7】実施例1によるシミュレーション結果。
【図8】実施例2によるシミュレーション結果。
【図9】実施例2と比較例3、4によるシミュレーション結果のラインプロファイル。
【図10】実施例3によるシミュレーション結果。
【図11】実施例4によるシミュレーション結果。
【図12】実施例4と比較例3、4によるシミュレーション結果のラインプロファイル。
【図13】実施例5の装置全体図。
【図14】座標軸の取り方を示す図。
【図15】実施例6及び実施例7の装置全体図。
【図16】実施例6及び実施例7で用いた被検体。
【図17】実施例6におけるモアレ取得方法とシミュレーション結果を示す図。
【図18】実施例6と比較例5、6によるシミュレーション結果のラインプロファイル。
【図19】実施例7におけるモアレ取得方法とシミュレーション結果を示す図。
【図20】比較例1によるシミュレーション結果。
【図21】比較例2によるシミュレーション結果。
【図22】比較例3によるシミュレーション結果。
【図23】比較例4によるシミュレーション結果。
【図24】比較例5及び比較例6におけるモアレ取得方法とシミュレーション結果。
【図25】比較例7におけるモアレ取得方法とシミュレーション結果を示す図。
【発明を実施するための形態】
【0024】
本発明の好ましい実施形態として実施形態1と実施形態2を添付の図面に基づいて説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。尚、実施形態1と2に共通することは、光の周期パターン(光周期パターン)を複数回検出し、複数の光周期パターンから仮想的な光周期パターンを求め、仮想的な光周期パターンを用いて光の波面の情報を求めることである。
【0025】
(実施形態1)
実施形態1では位相シフト法を基にした、被検体を透過した光の波面測定を行う波面測定装置について説明をする。
【0026】
また、本実施形態の波面測定装置は、トールボットラウ干渉法を用いたX線位相イメージングを行うX線撮像装置(以下、X線位相イメージング装置と呼ぶことがある。)である。ただし、本発明はトールボットラウ干渉法に限定されるものでも、X線位相イメージングを行う波面測定装置に限定されるものでもなく、被検体による周期的なパターンの変調を計測する技術一般に適用することができる。
【0027】
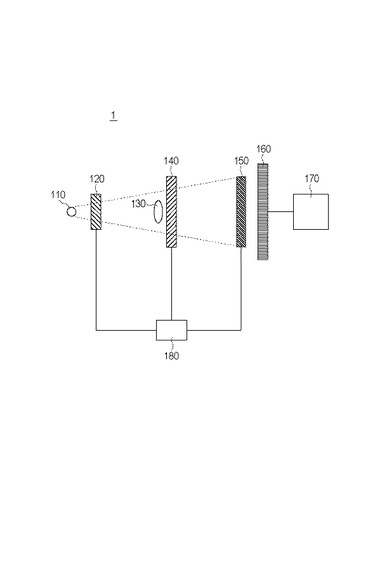
トールボットラウ干渉法を用いたX線位相イメージング装置については、Proc.SPIE 6318,63180S(2006)に記載があるので概略のみ記載する。本実施形態におけるトールボットラウ干渉法を用いたX線位相イメージング装置の模式図を図1に示した。
【0028】
本実施形態の波面測定装置1は、光源としてX線源110、X線源からのX線をビーム状に分割する線源格子120、位相型の回折格子(以下、位相格子と呼ぶことがある。)140、遮蔽格子150を備える。位相格子140および遮蔽格子150は、線源格子120からのX線で周期パターンを形成するための光学素子である。また、波面測定装置1は、遮蔽格子からのX線を検出する検出器160と、検出器160の検出結果に基づいて計算を行う演算部として計算機170を備える。更に、波面測定装置1は、線源格子、回折格子、遮蔽格子、検出器のうち少なくとも1つを移動させる移動部としてアクチュエーター180と、を備えている。
【0029】
各構成について説明をする。
【0030】
光源(X線源)110からのX線は線源格子120に照射される。
【0031】
線源格子120はX線透過部とX線遮蔽部を有しており、X線源110からのX線をビーム状に分割する。
【0032】
線源格子120により分割されたX線は被検体130に照射され、被検体130を透過したX線が回折格子により回折される。
【0033】
位相格子140はX線の位相を周期的に変化させる位相型の回折格子であり、位相基準部と位相シフト部が周期的に配列されている。位相格子140が被検体130を透過したX線を回折すると、トールボット距離と呼ばれる所定の距離に光(X線)の干渉パターンを形成する。この干渉パターンは光周期パターン(X線周期パターン)である。尚、本明細書における周期パターンとは、被検体が光源と周期パターンの間に配置されていないときでも一定の周期をもたないパターンも含む。例えば、周期パターンの中心から離れるにしたがって周期が徐々に変化するようなパターンであっても周期パターンという。
【0034】
遮蔽格子150は、遮蔽格子150上に干渉パターンが形成されるように、位相格子140とトールボット距離はなれた位置に配置される。遮蔽格子150は光(X線)遮蔽部(以下、遮蔽部)と光(X線)透過部(以下、透過部)とが周期的に配列されている。遮蔽部と透過部とが配列された周期は、遮蔽格子150上に形成される干渉パターンの周期とわずかに異なるため、遮蔽格子150を透過したX線は、X線周期パターンであるモアレを形成する。本実施形態では位相格子140と遮蔽格子150により形成されたモアレを検出し、このモアレから被検体の情報を求める。
【0035】
検出器160は光(X線)の強度を検出する画素を複数有しており、遮蔽格子150からの光で形成されたモアレを検出する。
【0036】
計算機170は検出器160による検出結果に基づいて、モアレを形成する光の波面の複数の位置における波面情報を算出する。但し、ここで算出する波面情報とは、位相、微分位相、振幅、散乱の少なくとも1つを指す。モアレを形成する光は被検体130による変調を受けているため、計算機170で算出した光の波面情報は被検体の情報を有している。
【0037】
計算機170による解析方法については下記で説明をする。
【0038】
アクチュエーター180は線源格子120、位相格子140、遮蔽格子150、のうち少なくとも1つを移動させることで、干渉パターンと遮蔽格子を相対的に移動又は回転させる。移動と回転の両方を行っても良い。これにより、モアレの位相をシフトさせることができる。尚、移動は位置を変化させる移動でもチルトを変化させる回転移動でも良い。また、本実施形態では干渉パターンと遮蔽格子を相対的に移動、回転させるが、移動部はモアレ(干渉パターン)の位相をシフトさせることができれば良い。例えば検出器160を移動させてもモアレの位相をシフトさせることができる。
【0039】
本実施形態の計算機170による波面情報を算出する解析方法について説明をする。
【0040】
上述のように、本実施形態では、位相シフト法を基にした解析方法について述べる。
【0041】
本実施形態の計算機170は、検出器160によって検出される第1の光周期パターン(第1のX線周期パターン)と、第1の光周期パターンと位相が異なる第2の光周期パターン(第2のX線周期パターン)を用いて波面情報を算出し、被検体の情報を得る。第1の光周期パターンと第2の光周期パターンは共に、遮蔽格子150を透過して形成されるモアレである。また、本実施形態では、第1の光周期パターンを検出した後、アクチュエーターにより干渉パターンと遮蔽格子を相対的に移動させてモアレの位相をシフトさせ、再度検出器でモアレを検出すると第2の光周期パターンを検出することができる。但し、干渉パターンと遮蔽格子の相対移動距離が干渉パターンまたは遮蔽格子の周期の整数倍と等しいと、形成されるモアレの位相がシフトしない(シフト量が2πの整数倍になる。)ため、第2の光周期パターンを検出することができない。(第1の光周期パターンが再度検出される。)従って、干渉パターンと遮蔽格子の位置を変化させる相対移動を行うことでモアレの位相をシフトさせる場合は、干渉パターンと遮蔽格子の相対移動距離が干渉パターンと遮蔽格子の周期の整数倍と等しくならないように移動させる。
【0042】
ここで、第1の光周期パターンのモアレをI1、第2の光周期パターンのモアレをI2と表す。
【0043】
本実施形態では、下記式(6)で表わされるI1とI2から被検体の情報を求める。
【0044】
【数6】
【0045】
ただし、a(x,y)はバックグラウンド周期パターン、b(x,y)はモアレの振幅分布、ωxは空間キャリア周波数、ωxαはI1とI2の位相シフト量(位相差)、φ(x、y)は被検体の微分位相分布である。また、x、yの単位は画素(ピクセル)とする。
【0046】
I1、I2から下記式(7)で表わされる仮想的なモアレ(以下、仮想モアレと呼ぶ)I3、I4を得ることができる。
【0047】
【数7】
【0048】
ただし、m、nは0以外の整数であり、mとnは同じ数でも異なった数でも良い。ωxに対してa(x,y)、b(x,y)、φ(x,y)の変化が十分に緩やかであるとき、式(7)は下記式(8)に変形できる。
【0049】
【数8】
【0050】
式(6)、式(7)および式(8)をまとめて下記式(9)のように書き換える。
【0051】
【数9】
【0052】
さらに、式(9)を行列表示すると、下記式(10)になる。
【0053】
【数10】
【0054】
よって、行列Aの疑似逆行列をA−1と表わすとすると、下記式(11)よりa(x,y)、c(x,y)、c*(x,y)が求められ、c(x,y)とc*(x,y)からb(x,y)、φ(x,y)を求めることができる。
【0055】
【数11】
【0056】
このように、第1の光周期パターン(I1)、第2の光周期パターン(I2)から、1つの位置(x、y)における波面情報を算出することができる。
【0057】
トールボットラウ干渉計はシアリング干渉計であるため、波面情報を微分したもの(微分波面情報)が得られる。そのため、求めたφ(x,y)をマッピングすることで被検体の微分位相像が求められる。更に微分位相像から位相像を、a(x,y)とb(x、y)から被検体の吸収像、散乱像を求めることができる。尚、トールボットラウ干渉計はシアリング干渉計であるため、本実施形態のφ(x、y)は被検体の微分位相分布を示すが、マイケルソン干渉計やフィゾー干渉計などのシアリング干渉計でない干渉計を用いるとφ(x、y)は被検体の位相分布を示す。そのため、シアリング干渉計でない干渉計を用いて得られたφ(x、y)をマッピングすると位相像が得られる。
【0058】
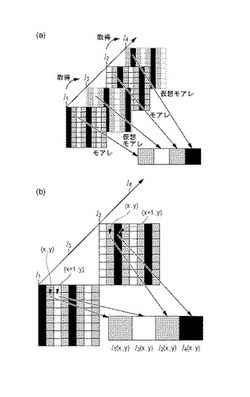
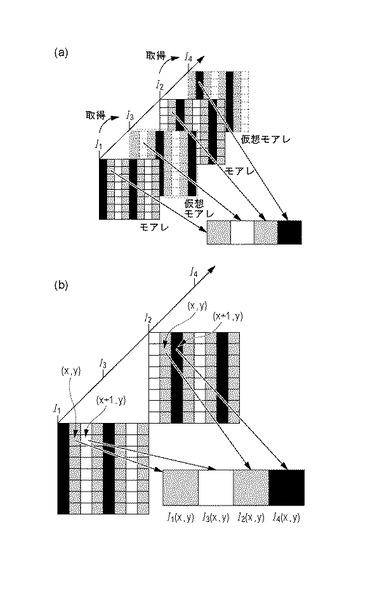
本実施形態の計算機170による解析方法の概念を図2に示した。図2(a)は、上記のように、I1からI3を、I2からI4を取得し、実際に検出したモアレ(I1、I2)と仮想モアレ(I3、I4)を用いて位相シフト法を行うことで被検体の情報を取得していることを示した図である。
【0059】
I1からI3を取得する方法は式(7)を用いており、I3内の特定の座標(x、y)におけるX線(光)の強度はI1内の特定の座標(x、y)と異なる座標(x−m、y)におけるX線の強度であるとした。I2からI4を取得する方法も同様である。
【0060】
図2(b)に、これを示した計算機170による解析方法を示す。
【0061】
図2(b)にはmとnを共に+1とした場合の本実施形態の計算機170による解析方法の概念を示す。図2(b)のように、I1とI2夫々の(x、y)、I3の(x、y)としてI1の(x+1、y)、I4の(x、y)としてI2の(x+1、y)におけるX線の強度の検出結果を用いて位相シフト法を行うことで、(x、y)における被検体の情報を取得する。
【0062】
本実施形態に用いられる解析方法を別の表現で説明をするために、(x、y)におけるX線の強度を検出する画素を第1の画素、(x−m、y)におけるX線の強度を検出する画素を第2の画素とする。更に、mとnが同じ値をとるとする。本実施形態では、第1の光周期パターン(I1)検出時の第1の画素の検出結果(I1(x、y))と、I1検出時の第2の画素の検出結果(I1(x+m、y))と、第2の光周期パターン(I2)検出時の第1の画素の検出結果(I2(x、y))と、I2検出時の第2の画素の検出結果(I2(x+n、y))を、それぞれ、I1、I3、I2、I4検出時の第1の画素((x、y))の検出結果とみなして位相を回復することにより、波面情報を算出する。尚、I1、I3、I2、I4検出時の第1の画素((x、y))の検出結果とみなして位相を回復するとは、I1、I3、I2、I4検出時の第1の画素((x、y))の検出結果として位相シフト法に用いられる計算方法を用いて位相を回復することである。位相シフト法に用いられる計算方法は上述の式(11)を用いても良いし、その他の計算方法を用いても良い。
【0063】
これにより、第1の画素に入射したX線(光)の波面情報を算出することができる。また、I1(x、y)と、I1(x+m、y)と、I2(x、y)と、I2(x+n、y)を、それぞれI1、I3、I2、I4検出時の第2の画素の検出結果とみなして位相シフト法を行っても良い。すると、第2の画素に入射したX線(光)の波面情報を算出することができる。但し、この時、第1の画素の検出結果とみなしても、第2の画素の検出結果とみなしても算出される波面情報は同じである。
【0064】
また、mとnは異なる値をとることもできる。例えば、I1検出時の第1の画素の検出結果と、I1検出時の第2の画素の検出結果と、I2検出時の第1の画素の検出結果と、I2検出時の第1の画素でも第2の画素でもない画素の検出結果を用いても、本実施形態と同様に解析と行うことができる。その場合、上記4つの検出結果がそれぞれ、I1、I3、I2、I4検出時の第1の画素の検出結果とみなして位相シフト法を行えばよい。
【0065】
また、I1とI2の位相差(ωxα)が、第1の画素が検出する光と第2の画素が検出する光の位相差と等しい場合でも、I1(x、y)、I1(x+m、y)、I2(x、y)、I2(x+n、y)を用いて位相シフト法を行うことができる。
【0066】
この場合、I1(x+m、y)とI2(x、y)が同じ(厳密には被検体の異なる部分を透過したX線なのでわずかに異なる。)である。そこで、I1(x+m、y)、I2(x、y)、I1(x+m、y)とI2(x、y)の平均、の3つのうちどれか1つをI2(x、y)、I1(x、y)をI1(x、y)、I2(x+n、y)をI3(x、y)として位相シフト法を行えばよい。モアレを表す式が、式(1)のように未知数を3つ持つ場合、仮想モアレを含めて3つ以上のモアレがあれば本実施形態の計算機170が行う解析方法を行うことができる。尚、仮想モアレを含めて3つ以上のモアレがあれば位相シフト法を用いることができるのは、上述のように、mとnは0以外の整数でればよく、+1に限定はされない。しかし、mとnの絶対値が小さい方がa(x,y)、b(x,y)、φ(x,y)の変化が緩やかであるため好ましい。mとnの絶対値の好ましい範囲は1〜3であり、さらに好ましくは1である。さらにm=nであることが好ましい。
【0067】
mとnの絶対値が3のとき、第2の画素は第1の画素から3画素の位置に配置されている。また、mとnの絶対値が1のとき、第2の画素は第1の画素に隣接している。このように、第1の画素と第2の画素が隣接しているとき、第2の画素は第1の画素から1画素の位置に配置されているとする。
【0068】
一般的な位相シフト法において用いる周期パターン毎の位相シフト量は同じであることが好ましい。例えば4枚のモアレを用いて解析する場合は、夫々のモアレの位相シフト量が1/2πずつになることが好ましい。本実施形態も同様に、I1、I2、I3、I4の位相シフト量が同じになることが好ましい。そのためには、m=n=±1とし、画素サイズを単位とするモアレ(周期パターン)の周期をP(モアレの周期80μm、画素サイズ20μmのとき、P=4)とすると、α=P/2を満たすようなI1とI2を用いて解析を行えばよい。
【0069】
つまり本実施形態は、第1の光周期パターン(I1)と第2の光周期パターン(I2)から第1の仮想周期パターン(I3)と第2の仮想周期パターン(I4)を算出し、4つの周期パターンに位相シフト法を適用することで被検体の情報を得る。
【0070】
以上、計算機170による第1の光周期パターンと第2の光周期パターンの解析方法について説明をした。上述のような計算を計算機170で行うには、上述のような計算を実行させるプログラムを計算機170に組み込めばよい。
【0071】
また、本実施形態では遮蔽格子を用いてモアレを形成し、このモアレを検出、解析したが、干渉パターンを直接検出し、解析を行っても良い。
【0072】
本実施形態のように遮蔽格子を用いると、干渉パターンのピッチよりも分解能が大きい検出器を用いることができる。
【0073】
(実施形態2)
実施形態2では、窓フーリエ変換法を基にした波面測定方法を用いて波面情報を算出する方法について説明をする。
【0074】
本実施形態の構成は計算機による計算方法が実施形態1と異なり、そのほかの構成は実施形態1と同じである。
【0075】
本実施形態の計算機も、実施形態1と同様、検出器160によって検出される第1の光周期パターンと、第1の光周期パターンと位相差がある第2の光周期パターンから仮想的な光周期パターンを算出し、この仮想的な光周期パターンを解析して波面情報を算出する。但し、仮想的な光周期パターンの算出方法と、仮想的な光周期パターンから波面情報を算出する解析方法は実施形態1と異なる。実施形態1と同様、第1の光周期パターンと第2の光周期パターンは共に、遮蔽格子150を透過して形成されるモアレの周期パターンであり、本実施形態では、第1の光周期パターンのモアレをI5、第2の光周期パターンのモアレをI6と表す。
【0076】
本実施形態では、下記式(12)で表わされるI5とI6から波面情報を算出する。
【0077】
【数12】
【0078】
但し、ωxαはI5とI6の位相差であり、αは0以外の整数である。
【0079】
モアレI5(x、y)、I6(x、y)、を合成することで仮想モアレI(x、y)を算出する。以下、モアレを合成することで算出した仮想モアレのことを、合成モアレ(合成光周期パターン)と呼ぶことがある。ピクセル(x0,y0)での被検体の情報を得る場合は、I(x、y)は例えば式(13)で表わされる。
【0080】
【数13】
【0081】
但し、[X]は床関数であり、X以下の最大の整数を表す。(例 [2.5]=2、[2]=2)
また、Pは、画素サイズを単位とするモアレの周期を表す。
【0082】
P−αが偶数のときは、以下の式を用いても良い。
【0083】
【数14】
【0084】
算出したI(x、y)より式(5)に基づいて微分位相像を求めることができる。
【0085】
窓関数は種々の窓関数を用いることができるが、本実施形態ではガウス関数を用いた。また、本実施形態では、モアレを窓関数により局所的に切り出した後、フーリエ係数から被検体の情報を取得している。しかし、モアレをフーリエ変換してフーリエスペクトルのピークを切り出した後、フーリエ逆変換を施すことでモアレによるチルトを消去し、被検体の情報を取得してもよい。これを式に示すと、下記式(15)のようになる。
【0086】
【数15】
【0087】
ただし、G(ζ,η)を窓関数、IS(ζ,η)をモアレI(x、y)のフーリエスペクトル、ζ,ηは空間周波数とする。また、フーリエ逆変換をF−1で示す。
【0088】
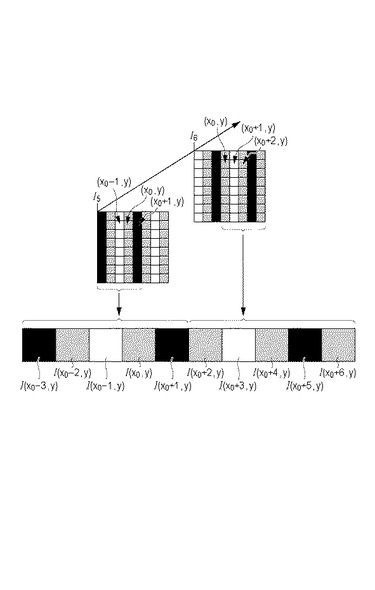
本実施形態の計算機による解析方法の概念を図3に示した。図3は、上記のように、I5(x、y)、I6(x、y)、を用いてI(x、y)を算出する概念を示したものである。尚、図3では、α=2、P=4、P−αは偶数であるが、式(13)を用いた。
【0089】
本実施形態に用いられる解析方法を別の表現で説明をするために、(x0、y)におけるX線の強度を検出する画素を第1の画素、(x0−1、y)におけるX線の強度を検出する画素を第2の画素とする。本実施形態では、I5検出時の第1の画素の検出結果(I5(x0、y))をI検出時の第1の画素の検出結果(I(x0、y))、I5検出時の第2の画素の検出結果(I5(x0−1、y))をI検出時の第2の画素の検出結果(I(x0−1、y))とした。また、I6検出時の第1の画素の検出結果(I6(x0、y))はI検出時の第1の画素でも第2の画素でもない画素の検出結果(I(x0+P−α、y))とすることでI5とI6を用いて合成モアレIを算出する。そして、合成モアレIとフーリエ変換を用いて1つの位置(x0、y)におけるX線の波面情報を算出することができる。これにより被検体の情報を取得することができる。
【0090】
つまり本実施形態では、第1の光周期パターン検出時の第1の画素の検出結果と、第1の光周期パターン検出時の第2の画素の検出結果と、第2の光周期パターン検出時の第1の画素の検出結果が、1つの周期パターン(合成周期パターン)に由来するものとみなす。そしてこの合成周期パターンに、フーリエ変換を行うことで被検体に関する情報を算出している。
【0091】
I5検出時に第1の画素に入射するX線と、I6検出時に第1の画素に入射するX線は被検体の(ほぼ)同じ個所を透過したX線である。よって、I5検出時に第1の画素に入射するX線と、I6検出時に第1の画素に入射するX線が有している被検体の情報は(ほぼ)同じである。
【0092】
一方、一般的に用いられる窓関数は、中心ほど振幅が大きい。よって、(x0、y)に入射したX線(光)の、波面情報を算出するときには、I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果が、合成モアレIの、窓関数の中心の近くにある方が正確な値を算出することができる。
【0093】
そのためには、I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果が近くにある方が良い。I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果の、合成モアレ内(合成周期パターン内)での距離はP−αなので、P−αは小さい方が好ましく、具体的には3以下が好ましい。
【0094】
P−αが3以下であるとき、I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果は合成モアレI内で3画素以内に配置される。
【0095】
P−αが1のとき、合成モアレ内で、第1の画素の検出結果同士が隣接する。
【0096】
尚、本明細書において被検体の情報とは、被検体を透過したX線(光)の波面情報から得られる情報であり、被検体の吸収、散乱、位相に関する情報である。各画素に入射したX線(光)毎に、X線の波面情報を算出することで複数の位置における光の波面情報を算出することができる。また、1つの位置における波面情報から得られる被検体の情報を複数求めてマッピングすることにより、被検体の吸収像、散乱像、微分位相像、位相像を得ることができる。
【0097】
(実施例1)
実施例1では実施形態1に示した波面測定装置を用いて、1方向に周期をもつモアレ(1次元モアレ)を用いて1方向の微分位相像をシミュレーションによって求めた具体例を説明する。
【0098】
本実施例の波面測定装置は、実施形態1と同様、図1に示した波面測定装置である。具体的な構成について説明をする。
【0099】
本実施例のX線源110の焦点の大きさは100μmであり、X線源110より照射されるX線のエネルギーは17.5keVとした。
【0100】
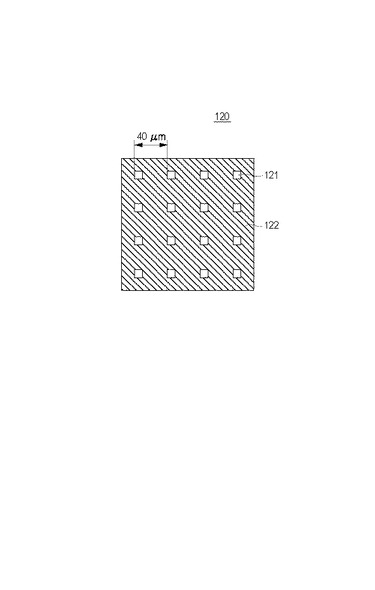
本実施例に用いる線源格子120の模式図を図4に示した。本実施例の線源格子120は、透過部121と遮蔽部122が2次元に配列された2次元格子であり、格子周期は40μm、透過部121の幅は5μmであるとした。
【0101】
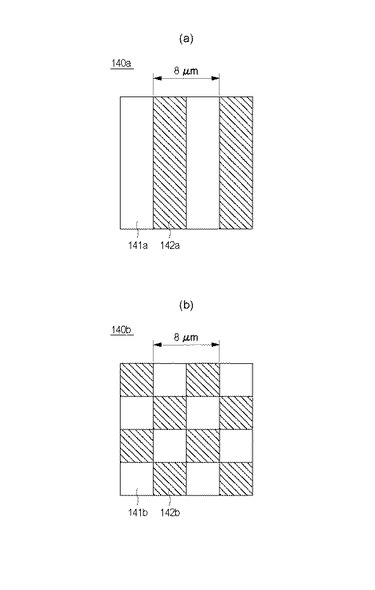
本実施例に用いる回折格子の模式図を図5(a)に示した。本実施例の回折格子は、1次元の位相格子140aであり、位相基準部141aと位相シフト部142aが8μm周期で配列されている。位相格子140aは、位相基準部141aを透過したX線と、位相シフト部142aを透過したX線の位相差がπになるように構成されており、このような格子を以下、π格子と呼ぶ。
【0102】
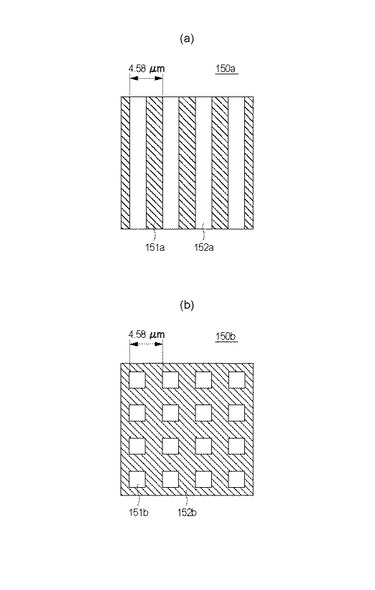
本実施例に用いる遮蔽格子の模式図を図6(a)に示した。本実施例の遮蔽格子150aは遮蔽部151aと透過部152aとが4.58μm周期で配列されている。遮蔽格子150aは位相格子140aと遮蔽格子150aとの間の距離が線源格子120と位相格子140aとの間の距離の1/10になるように配置されている。
【0103】
検出器160には、X線の強度を検出する8×8μm2の画素が2次元に配列されており、遮蔽格子150aからのX線を検出する。位相格子140aと遮蔽格子150aにより形成されるモアレの周期は検出器上32μmであり、検出器の4画素がモアレの1周期になるようにした。
【0104】
被検体は直径250μmのファイバー4本であり、複素屈折率は6.70×10−8−i×9.07×10−11とした。
【0105】
本実施例の計算機による解析方法について説明をする。
便宜上I1、I2として式(16)で表わされる2つのモアレを用いて被検体の微分位相像を求めた。
【0106】
【数16】
【0107】
式(7)のmとnを共に+1とし、式(16)から仮想モアレI3、I4を下記式(17)のように示す。
【0108】
【数17】
【0109】
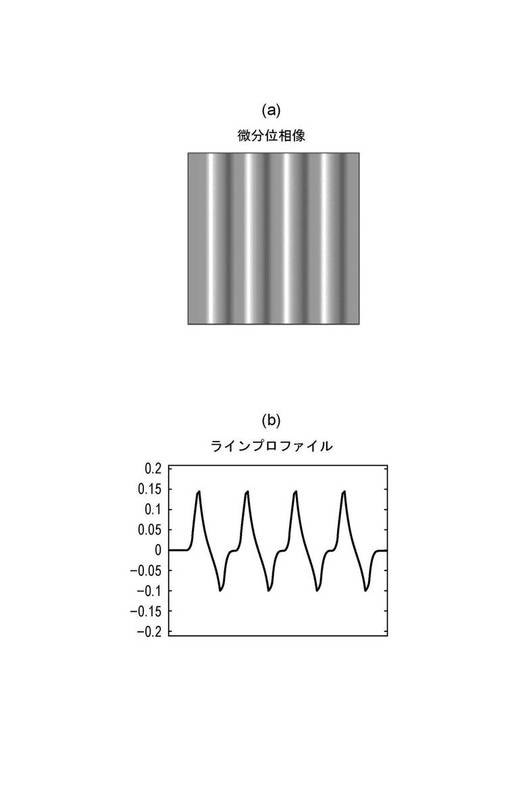
式(16)と式(17)を式(11)に代入して被検体の微分位相像を取得した。図7(a)は本実施例により得られた被検体の微分位相像、図7(b)は図7(a)の微分位相像のラインプロファイルである。
【0110】
(比較例1)
比較例1では、位相シフト法を用いて被検体の微分位相像を取得した例について説明をする。
【0111】
本比較例の波面測定装置は、計算機以外は実施例1と同じであるとし、実施例1と同じ被検体を用いてシミュレーションを行った。
【0112】
本比較例における計算機で行われる解析方法について説明をする。
【0113】
本比較例では、下記式(18)で示される4つのモアレと式(3)を用いて微分位相像を求めた。
【0114】
【数18】
【0115】
図20(a)は本比較例により取得された微分位相像であり、図20(b)は図20(a)に示した微分位相像のラインプロファイルである。
【0116】
本比較例では、4つのモアレを用いて各画素で独立に被検体の情報を取得するのに対して、実施例1では2つのモアレを用いて、各画素と、その画素に隣接する画素の検出結果も利用している。これらにより、位相シフト法では最低でも3つのモアレが必要であるのに対して、実施例1では2つのモアレから被検体の情報を求められる。
【0117】
(比較例2)
比較例2では、窓フーリエ変換法を用いて被検体の微分位相像を取得した例について説明をする。
【0118】
本比較例の波面測定装置も計算機以外は実施例1と同じであるとし、実施例1と同じ被検体を用いてシミュレーションを行った。
【0119】
本比較例における計算機で行われる解析方法について説明をする。
【0120】
本比較例では上記式(18)のI7および、式(5)を用いた。また、窓関数としてガウス関数を用いた。また、波数空間上において、式(5)に示したa(x,y)、c(x,y)、c*(x,y)、のスペクトルが、互いにオーバーラップするため、それらは分離した。
【0121】
図21(a)は本比較例により取得された微分位相像であり、図21(b)は図21(a)に示した微分位相像のラインプロファイルである。図7と図21を図20と比較すると、比較例2よりも実施例1のほうが比較例1に近い微分位相像が得られたことが分かる。そのため、本比較例よりも実施例1の方が正確に近い被検体の微分位相像が取得できると考えられる。
【0122】
(実施例2)
実施例2では実施形態1に示した波面測定装置を用いて、x方向とy方向の2方向に周期をもつモアレ(2次元モアレ)を用いてx方向の微分位相像とy方向の微分位相像をシミュレーションによって求めた具体例を説明する。2次元モアレを用いてx方向の微分位相像とy方向の微分位相像を算出する場合も、1次元と同様の計算を2方向に対して行えばよいため、実施例1と重複する部分は省略する。
【0123】
X線源110、線源格子120、検出器160は実施例1と同じものを用いた。
【0124】
本実施例に用いる回折格子の模式図を図5(b)に示した。本実施例の回折格子は、2次元の位相格子140bであり、位相基準部141bと位相シフト部142bが2次元に8μm周期で配列されている。また、実施例1と同様π格子である。
【0125】
本実施例に用いる遮蔽格子の模式図を図6(b)に示した。本実施例の遮蔽格子150bは遮蔽部151bと透過部152bとが2次元に4.58μm周期で配列されている。また、実施例1と同様、位相格子140bと遮蔽格子150bとの間の距離が線源格子120と位相格子140bとの間の距離の1/10になるように遮蔽格子150bを配置する。
【0126】
被検体は直径800μmの球体であり、複素屈折率は7.77×10−8−i×9.42×10−11とした。
【0127】
本実施例では、基準となるモアレ(第1の光周期パターン)と、基準となるモアレに対してx方向に位相がπずれたモアレ(第2の光周期パターン)を用いてx方向の微分位相像を求めた。更に、基準となるモアレ(第1の光周期パターン)と、基準となるモアレに対してy方向にπずれたモアレ(第3の光周期パターン)を用いてy方向の微分位相像を求めた。つまり、合計3つのモアレを用いて、x方向とy方向の微分位相像を求めた。言うまでもないがこのとき、第1の光周期パターンに対する第2の光周期パターンの位相のシフト方向(x方向)と、第1の光周期パターンに対する第3の光周期パターンの位相のシフト方向(y方向)は垂直に交わっている。それぞれの微分位相像の求め方は実施例1と同様であるが、以下簡単に説明をする。
【0128】
本実施例に用いられる解析方法を説明をするために、(x、y)におけるX線の強度を検出する画素を第1の画素、(x−m、y)におけるX線の強度を検出する画素を第2の画素、(x、y−q)におけるX線の強度を検出する画素を第3の画素、とする。
【0129】
本実施例では、第1の光周期パターン検出時の第1の画素と第2の画素の検出結果と、第2の光周期パターン検出時の第1の画素と第2の画素の検出結果を用いてx方向の微分位相像を算出する。
【0130】
更に、第1の光周期パターン検出時の第1の画素と第3の画素の検出結果と、第3の光周期パターン検出時の第1の画素と第3の画素の検出結果を用いてy方向の微分位相像を算出する。
【0131】
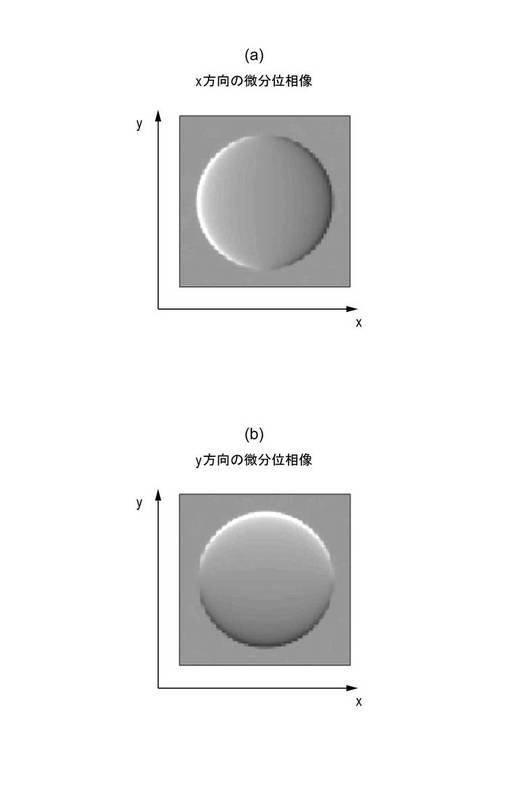
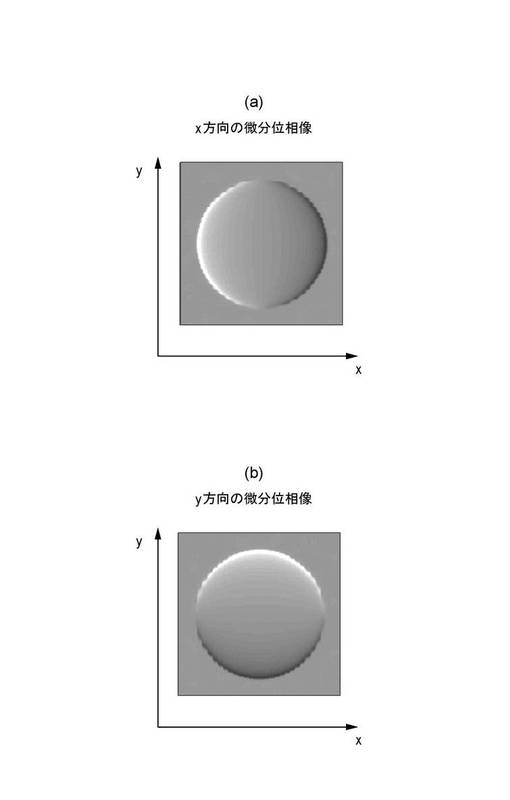
図8の(a)は第1の光周期パターンと第2の光周期パターンを用いて得た、x方向の微分位相像である。また、図8の(b)は第1の光周期パターンと第3の光周期パターンを用いて得た、y方向の微分位相像である。このように、実施例3では3つのモアレから2次元の微分位相像を得ることができた。
【0132】
(比較例3)
比較例3では、位相シフト法を用いて被検体の2次元の微分位相像を取得した例について説明をする。
【0133】
本比較例の波面測定装置は計算機以外は実施例2と同じであるとし、実施例2と同じ被検体を用いてシミュレーションを行った。
【0134】
本比較例における計算機で行われる解析方法について説明をする。
本比較例によるx方向の微分位相像は、式(3)を用い、x方向に位相が0.5πずつずれた4つのモアレから得た。y方向の微分位相像も同様に式(3)を用い、y方向に位相が0.5πずつずれた4つのモアレから求めた。つまり合計で7つのモアレから2方向の微分位相像を求めた。
【0135】
図22の(a)と(b)はそれぞれ、本比較例により得られたx方向とy方向の微分位相像である。尚、位相シフト法を用いて2次元の微分位相像を取得する場合、5つ以上のモアレが必要である。
【0136】
(比較例4)
比較例4では、窓フーリエ変換法を用いて被検体の2次元の微分位相像を取得した例について説明をする。本比較例の波面測定装置も計算機以外は実施例2と同じであるとし、実施例2と同じ被検体を用いてシミュレーションを行った。
【0137】
本比較例における計算機で行われる解析方法について説明をする。
【0138】
本比較例によるx方向とy方向の微分位相像は、式(5)を用いて1つのモアレから求めた。但し、窓関数としてガウス関数を用い、波数空間上においてa(x,y)、c(x,y)、c*(x,y)、のスペクトルは、オーバーラップしたため分離した。
【0139】
図23の(a)と(b)はそれぞれ、本比較例により得られたx方向とy方向の微分位相像である。
【0140】
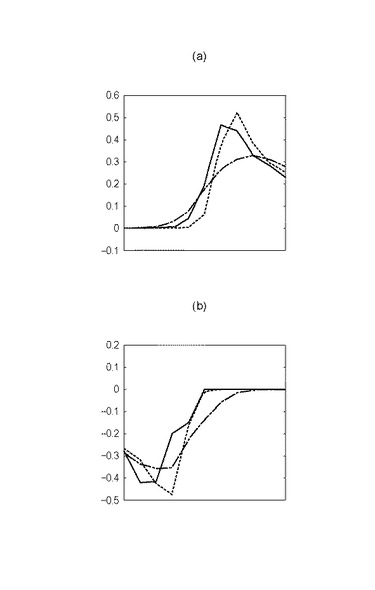
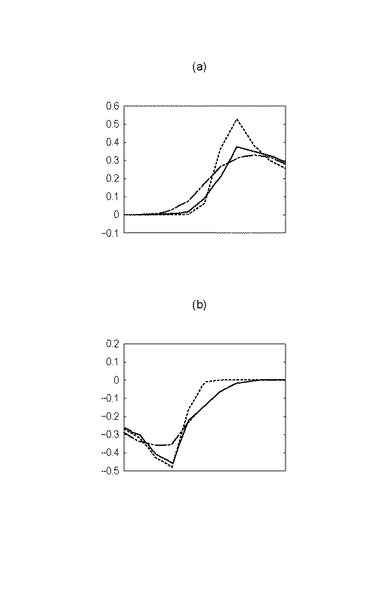
実施例2と、比較例3、4により得られた被検体のX方向の微分位相像を用いてラインプロファイルを作成したものを図9((a)、(b))に示した。図9(a)が被検体の左端のラインプロファイル、図9(b)が被検体の右端のラインプロファイルである。3つの線はそれぞれ、実線が実施例2で得られた微分位相像、破線が比較例3で得られた微分位相像、一点鎖線が比較例4で得られた微分位相像、のラインプロファイルである。図9を見ると、実施例2の方が比較例4よりも比較例3と近い結果が得られており、より正確に近い微分位相像を得られていると考えられる。
【0141】
(実施例3)
実施例3では、実施形態2に示した解析方法を行う波面測定装置を用いて、1方向に周期をもつモアレ(1次元モアレ)を用いて1次元の微分位相像(位相像を1方向に微分した像)をシミュレーションによって求めた具体例を説明する。
【0142】
本実施例の計算機以外の構成は、実施例1と同じであり、被検体も実施例1と同じものを用いた。
【0143】
本実施例の計算機によるモアレの解析方法について説明をする。
本実施例では、基準となるモアレI5と、基準となるモアレI5に対して位相が0.5πずれたモアレI6を用いて被検体の微分位相像を求めた。検出器の画素を単位とするモアレの周期P=4、α=1を式(13)に代入して、下記式(19)が得られる。
【0144】
【数19】
【0145】
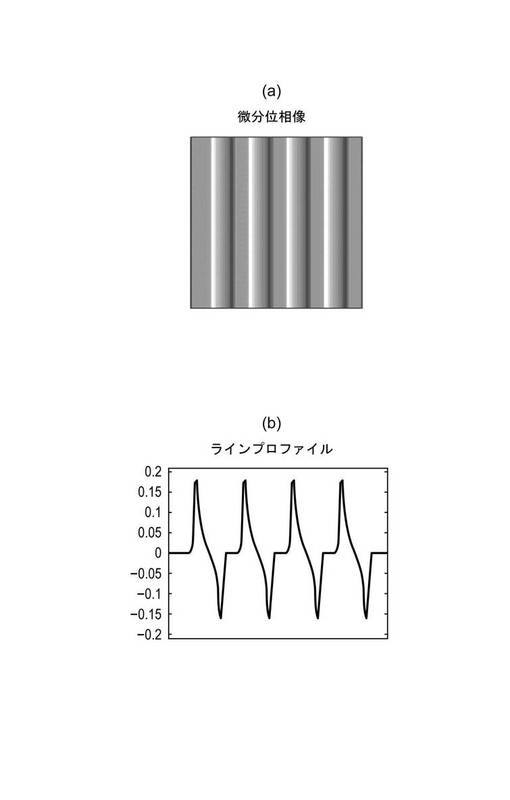
式(19)で表されるモアレを、式(5)を用いて解析することで、微分位相像が得られる。図10は本実施例により得られた被検体の微分位相像およびラインプロファイルである。図10と図21を比較すると、比較例2よりも本実施例の方が比較例3と近い結果が得られているため、本比較例の方が比較例2よりも正確に近い微分位相像を得られていると考えられる。
【0146】
(実施例4)
実施例4では、実施形態2に示した解析方法を行う波面測定装置を用いて、2次元モアレを用いてx方向の微分位相像とy方向の微分位相像をシミュレーションによって求めた具体例を説明する。
【0147】
本実施例の波面測定装置は、計算機以外の構成は実施例2と同じであるとし、被検体も実施例2と同じものを用いた。
【0148】
本実施例の計算機によるモアレの解析方法について説明をする。
【0149】
本実施例では、基準となるモアレと、基準となるモアレに対してx方向に位相が0.25πずれたモアレから式(13)と式(5)を用いてx方向の微分位相像を取得した。同様に、基準となるモアレと、基準となるモアレに対してy方向に位相が0.25πずれたモアレから式(13)と式(5)を用いてy方向の微分位相像を取得した。尚、P=4、α=1とした。
つまり、本実施例では、合わせて3つのモアレから被検体のx方向とy方向の微分位相像を求めた。
【0150】
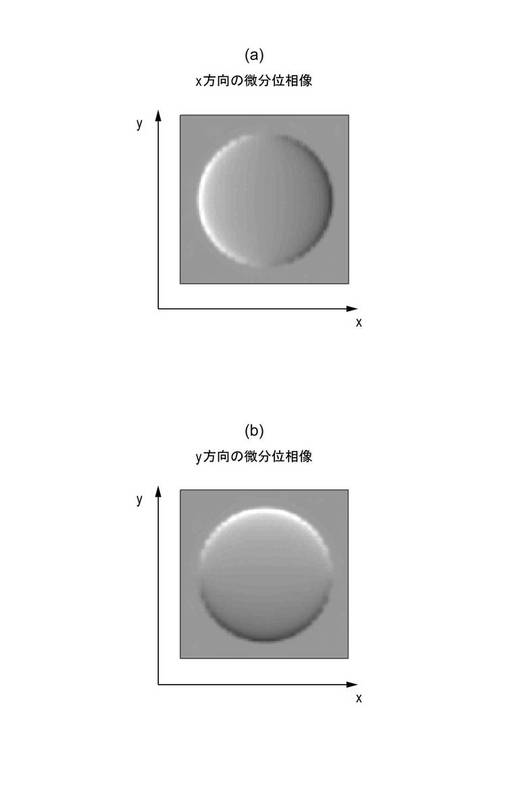
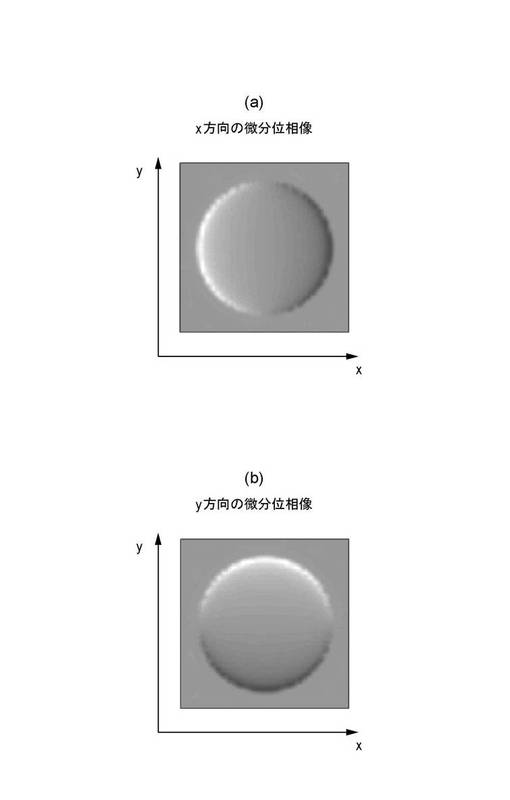
図11(a)は本実施例により得られたx方向の微分位相像であり、図11(b)は本実施例により得られたy方向の微分位相像である。また、実施例4と、比較例3、4により得られた被検体のx方向の微分位相像を用いてラインプロファイルを作成した。図12(a)が被検体の左端のラインプロファイル、図12(b)が被検体の右端のラインプロファイルである。3つの線はそれぞれ、実線が実施例4で得られた微分位相像、破線が比較例3で得られた微分位相像、一点鎖線が比較例4で得られた微分位相像、のラインプロファイルである。図12を見ると、実施例4の方が比較例4よりも比較例3と近い結果が得られているため、実施例4の方が比較例4よりも正確に近い微分位相像を得られていると考えられる。
【0151】
以上、本発明を、微分干渉法を行う干渉計に適用した場合について説明したが、本発明は微分干渉法を行う干渉計にのみ適用できるものではなく、(微分でない)干渉法を行う干渉計や、干渉を用いない波面測定装置に適用することもできる。
【0152】
(実施例5)
実施例5では、干渉を用いない波面測定装置の例として、特表2010−502977号公報に記載されている波面測定装置に本発明を適用した場合について図13を用いて簡単に説明をする。
【0153】
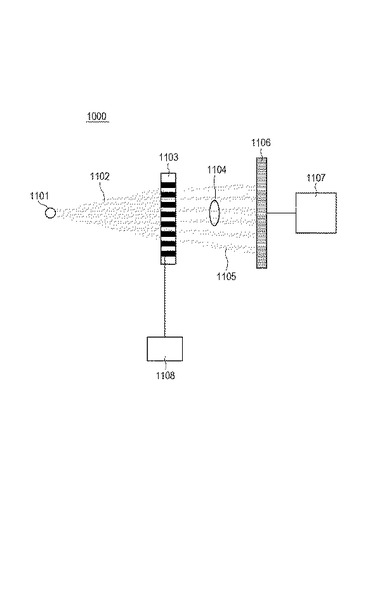
図13の波面測定装置1000は被検体にX線を照射し、被検体によるX線の屈折量を検出、解析することで波面の情報を算出し、被検体の位相に関する情報を得る波面測定装置である。
【0154】
図13に示した波面測定装置1000は、X線源1101と、X線源1101から出射した発散X線1102を分割してX線ビーム1105を形成する分割素子1103、X線ビームを検出する検出器1106を備える。更に、検出器1106による周期パターンの検出結果に基づいて計算を行う演算部として計算機1107と、分割素子103の移動部としてアクチュエーター1108も備えている。また、被検体1104は図13に示したように分割素子1103と検出器1106の間に置かれていても良いし、X線源1101と分割素子1103の間に置かれても良い。
【0155】
この波面測定装置では、分割素子1103によってX線が分割されることで検出器上にX線の強度差がついた周期パターンが形成される。また、アクチュエーター1108によって分割素子1103が移動することで周期パターンの位相がシフトする。そのため、検出器1106により第1の光周期パターンを検出した後、アクチュエーター1108によって分割素子を移動させて再度検出を行うことで第2の光周期パターンを取得することができる。第1の光周期パターンと第2の光周期パターンを用いて波面情報を算出する方法は、上述のシアリング干渉計を用いて取得した第1の光周期パターンと第2の光周期パターンを用いて波面情報を算出する方法と同じであるため説明を省略する。
【0156】
(実施例6)
実施例6では、被検体をあらゆる方向から撮像して得られた投影像から断層像を求めるX線コンピュータ断層撮影装置(X線CT装置)の例を説明する。尚、本実施例のX線CT装置も波面測定装置である。本実施例では、実施形態1の波面測定装置が行う波面測定方法を用いて求めた微分位相像を投影位相像として用い、断層位相像を求めた。
【0157】
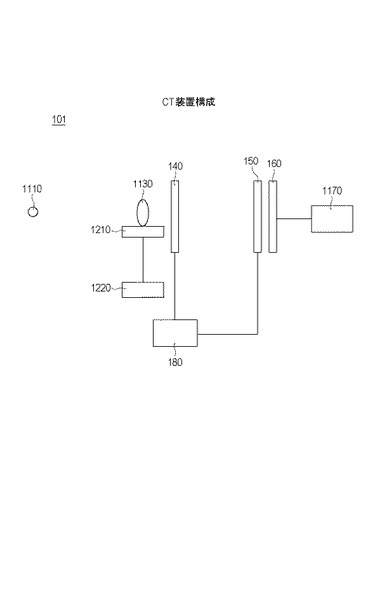
本実施例の波面測定装置101を図15に示した。波面測定装置101は、光源として平行X線(平行光)を出射するX線源1110を備え、線源格子を備えていない。また、被検体を乗せる台1210および台を回転するためのアクチュエーター1220を備えており、更に検出器160の検出結果に基づいて計算を行う計算機1170により断層像の情報を算出する点が図1に記載の波面測定装置1と異なる。
【0158】
しかし、位相格子140により干渉パターンを形成することと、干渉パターンが形成される位置に遮蔽格子150を配置してモアレを形成すること、そのモアレを検出器160により検出することは図1に記載の波面測定装置1と同様である。
【0159】
尚、波面測定装置101では、台1210および台を回転するためのアクチュエーター1220により被検体を回転させる構成になっているが、被検体を回転させる代わりに波面測定装置101を回転させてもよい。複数の投影角度で被検体による位相の変調を受けた波面を撮像することで、複数の投影像を取得でき、その複数の投影像から被検体の断層像を求めることができる。
【0160】
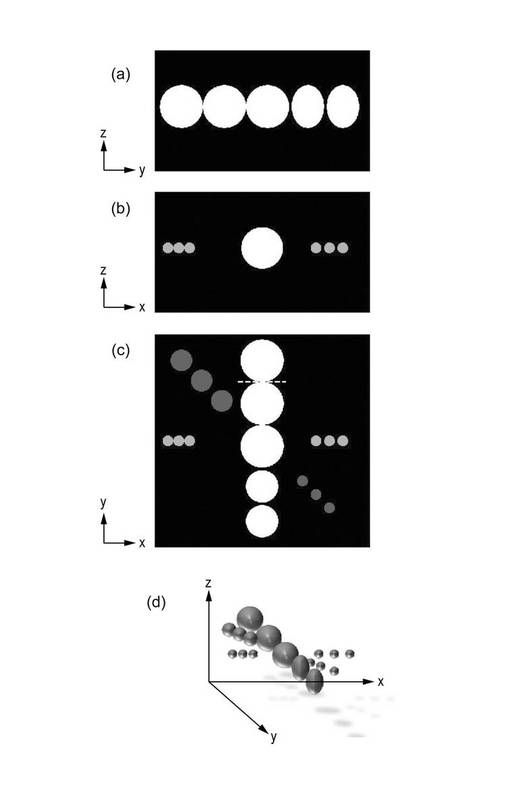
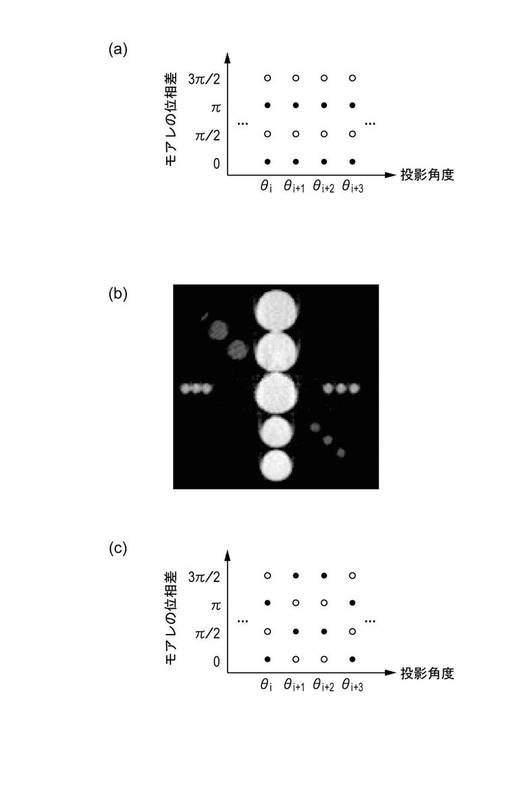
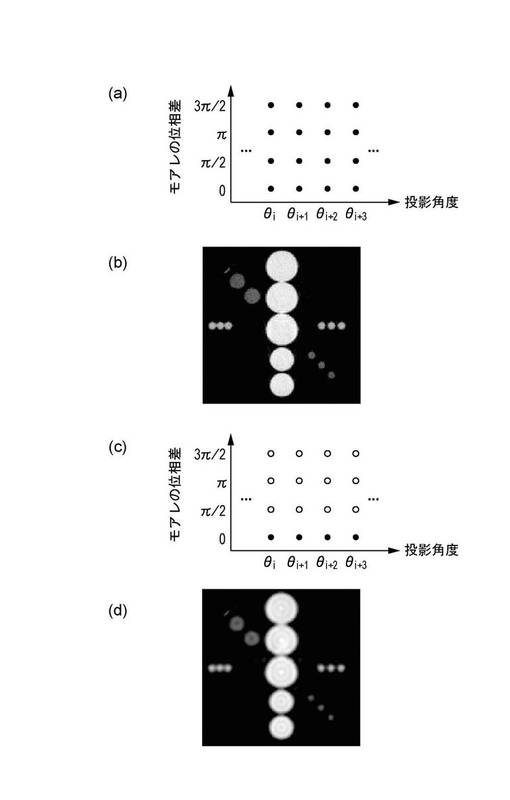
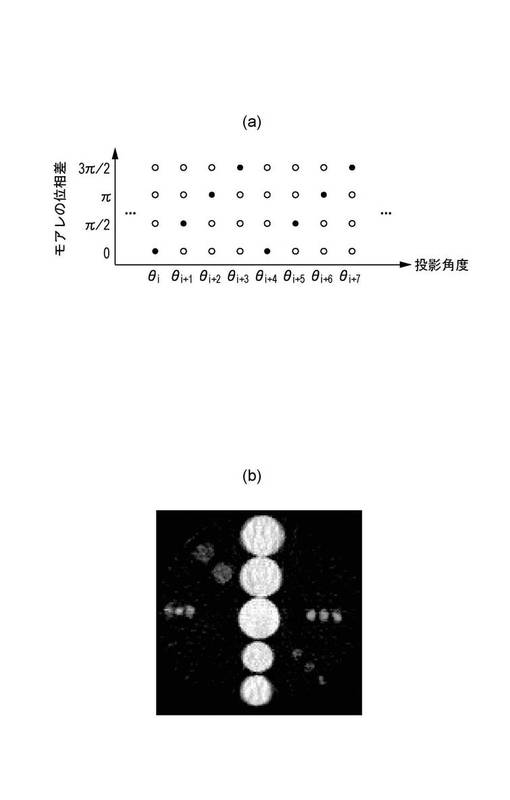
本実施例で用いた被検体1130を図16((a)〜(d))に示した。図16(a)は被検体をyz平面で切った断面図であり、図16(b)は被検体をxz平面で切った断面図であり、図16(c)は被検体をxy平面で切った断面図であり、図16(d)は被検体の俯瞰図である。本実施例では、被検体を1.40625度刻みで180度回転させて、128方向から被検体を撮像した。各投影角度において、基準となるモアレと基準となるモアレに対してX方向(被検体の回転軸および投影方向と垂直な方向とする)に位相がπずれたモアレを検出した。各投影角度におけるモアレの検出の考え方を図17(a)に示した。横軸は投影角度、縦軸は基準となるモアレに対するX方向への位相差を示しており、図中の黒丸(●)で表わした投影角度、位相差の位置でモアレを検出し、白丸(〇)で表した投影角度、位相差の位置ではモアレを検出しない。ただし、モアレ検出時の投影角度、相対位相差の位置はこれに限定されるものでなく、例えば図17(c)に示したようにモアレの検出を行っても良い。つまり、本実施例のように微分位相像から断層位相像を求める場合、各投影角度で被検体の微分位相像が得られれば良いため、全ての投影角度で検出するモアレの位相差が同じである必要はない。
【0161】
検出したモアレより、実施例1で投影微分位相像を求めた方法と同様の方法で、各投影角度におけるX方向の投影微分位相像を求めた。すなわち256枚のモアレから128方向の投影微分位相像を求めた。更にこの128方向からの投影微分位相像より、被検体の断層位相像を求めた。投影微分位相像より断層位相像を求める方法について説明をする。
【0162】
本実施例では、微分位相像から断層位相像を求める画像再構成法として、フィルタ補正逆投影(Filtered Back Projection;FBP)法を用いた。FBP法は画像再構成法の一つとして広く知られている手法のため、本実施例ではその概略を説明する。但し、微分位相像から断層位相像を求める方法はFBP法に限らず、種々の画像再構成法を使用することができる。
【0163】
一般に画像再構成法は、物体のあらゆる方向からの投影像より、物体の2次元または3次元的な物理量の分布を求める手法である。すなわち、一般的な画像再構成法は被検体の物理量の3次元的な分布;f(x、y、z)を、その投影;∫f(x、y、z)ds(dsは投影方向に沿う線素)から求める方法である。本実施例では、物体の各断面(各投影方向がつくる平面)での物理量の分布の画像再構成法のみを扱うが、これが本発明の適用範囲を狭めるものではない。
【0164】
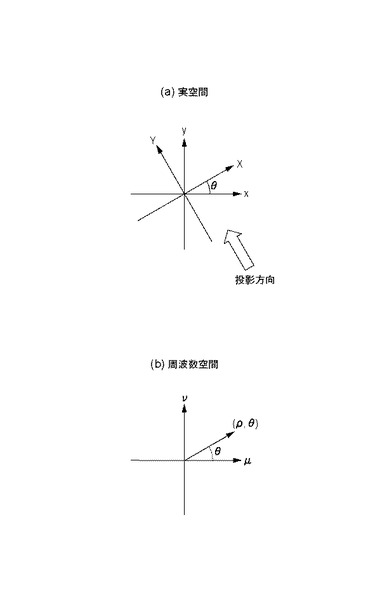
投影像から物体の各断面での物理量の分布(断層像と呼ぶことがある);f(x、y)を取得するFBP法を具体的に説明する。図14(a)を用いてx軸とy軸について説明をする。図14(a)に示したように、x軸、y軸は矢印で示した投影方向を含む平面内にとる。z軸はx軸とy軸に垂直に取るが、簡単のため表示していない。ここで、本実施例では実施例5以前と、軸の取り方が異なるので注意されたい。図14(a)に示したように、x−y座標系をθだけ回転した座標系をX−Y座標系とする。図14(a)の空間(実空間)を周波数空間に変換したものを図14(b)に示す。つまり、x−y座標系に対応した空間周波数空間の座標系をμ−ν座標系とする。
【0165】
まず、投影像;p(X、θ)を式(20)で定義する。
【0166】
【数20】
【0167】
次に、f(x、y)の2次元フーリエスペクトルF(μ、ν)を考える。スペクトルF(μ、ν)は式(21)で表わされる
【0168】
【数21】
【0169】
極座標表示;(ρ、θ)を用いて式(21)を変形すると、
【0170】
【数22】
【0171】
が得られる。ただし、F(X)[a]は、aのX方向へのフーリエ変換を表す。また、次の関係を用いた。
【0172】
【数23】
【0173】
式(22)が意味するのは、p(X、θ)をX方向へ1次元フーリエ変換して求められるスペクトルは、F(μ、ν)のθ方向でのスペクトルと等しくなるということであり、投影切断面定理として知られている。
【0174】
よって、F(μ、ν)を2次元逆フーリエ変換することでf(x、y)が求まる。
【0175】
【数24】
【0176】
式(22)を用いて式(24)を変形すると、式(25)が得られる。
【0177】
【数25】
【0178】
すなわち、式(25)より以下のステップにより投影像から断層像が得られることが分かる。
(i)各投影像;p(X、θ)をフーリエ変換する。
(ii)得られたスペクトル;F(X)[p(X、θ)]に周波数フィルタ;|ρ|を掛ける。
(iii)フィルタ処理したスペクトルを逆フーリエ変換し逆投影する。
【0179】
さらに、式(25)から式(26)が得られる。
【0180】
【数26】
【0181】
p(X、θ)をXで微分したものを投影微分像と呼ぶと、式(26)より以下のステップにより投影微分像から断層像が得られることが分かる。
(i)各投影微分像;dp(X、θ)/dXをフーリエ変換する。
(ii)得られたスペクトル;F(X)[dp(X、θ)/dX]に周波数フィルタ;−i|ρ|/ρを掛ける。
(iii)フィルタ処理したスペクトルを逆フーリエ変換し逆投影する。
【0182】
式(25)、式(26)による再構成法のほかに、周波数フィルタの形状が異なるものもFBP法と呼ばれ、一般に知られており、それらの周波数フィルタが式(25)と式(26)と異なるものも本実施例に用いることができる。
【0183】
ここまで、FBP法による断層像の取得方法を説明した。トールボット干渉計で検出できるモアレから得られる投影微分位相像∂p(X,θ、z)/∂Xと、被検体の断層位相像Φ(x、y、z)の関係は、式(20)を用いると、下記式(27)で表される。
【0184】
【数27】
【0185】
よって式(26)を用いることで、投影微分位相像から断層位相像Φ(x、y、z)が求まる。または、各投影微分位相像を各々積分して投影位相像を求めた後、式(25)を用いることでも断層位相像Φ(x、y、z)を求めることができる。図17(b)は本実施例において得られた被検体の断層位相像である。
【0186】
ここまでの説明から明らかなように、周期パターンから各投影像を取得するプロセスと、各投影像から各断層像を取得するプロセスは独立である。したがって、各投影像から各断層像を取得する画像再構成法はFBP法に限らず、種々の画像再構成法を本発明と組み合わせることができる。
【0187】
また前述のように、トールボット干渉計(またはトールボットラウ干渉計)では、被検体の微分位相像の他に吸収像と散乱像を得ることもできる。それぞれを、投影吸収像、投影散乱像と呼び、吸収、散乱に対応する断層像をそれぞれ、断層吸収像、断層散乱像と呼ぶことにする。すると、投影微分位相像から断層位相像を求めた方法と同様に、投影吸収像、投影散乱像から式(25)を用いることで断層吸収像、断層散乱像を求めることができる。
【0188】
(比較例5)
比較例5では、位相シフト法を用いて求めた被検体の投影微分位相像より断層位相像を求めた例を説明する。本比較例でも、被検体を1.40625度刻みで180度回転させ、128方向から被検体を撮像した。ただし、各投影角度において基準となるモアレの他に、基準となるモアレに対してX方向に位相がπ/2、π、3π/2ずれたモアレを検出し、各投影角度において合計4つのモアレを検出した点が実施例6と異なる。各投影角度におけるモアレの検出位置の考え方を図24(a)に示した。検出したモアレを用いて、比較例1で投影微分位相像を求めた方法と同様の方法で、各投影角度におけるX方向の投影微分位相像を求めた。すなわち512枚のモアレから128方向の投影微分位相像を求めた。この128方向からの投影微分位相像から、式(26)に従い被検体の断層位相像を求めた。図24(b)は本比較例において得られた被検体の断層位相像である。
【0189】
(比較例6)
比較例6では、窓フーリエ変換法を用いて求めた被検体の投影微分位相像より断層位相像を求めた例を説明する。本比較例でも、被検体を1.40625度刻みで180度回転させ、128方向から被検体を撮像した。ただし、各投影角度において検出するモアレは一枚である。モアレの撮像位置の考え方を図24(c)に示した。検出したモアレを用いて、比較例2で投影微分位相像を求めた方法と同様の方法で各投影角度におけるX方向の投影微分位相像を求めた。すなわち128枚のモアレから128方向の投影微分位相像を求めた。この128方向からの投影微分位相像から、式(26)に従い被検体の断層位相像を求めた。図24(d)は本比較例により得られた被検体の断層位相像である。
【0190】
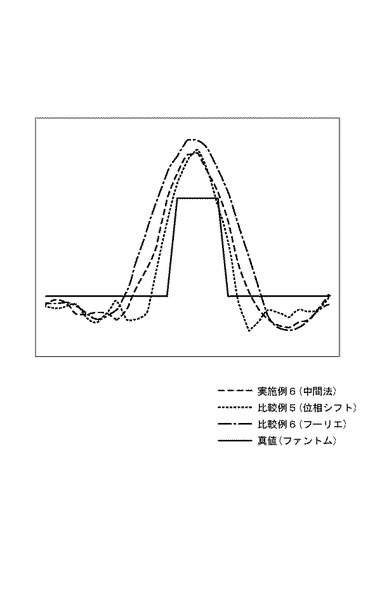
実施例6、比較例5、および比較例6で求めたそれぞれの断層位相像の空間分解能を比較するため、図17(b)、図24(b)、図24(d)の点線で示した部分のラインプロファイルを図18に示した。点線が実施例6で得られた断層位相像、破線が比較例5で得られた断層位相像、一点鎖線が比較例6で得られた断層位相像、実線が被検体の真の断層位相像のラインプロファイルである。ラインプロファイルより、比較例6、実施例6、比較例5の順に真の断層位相像に近い断層位相像が得られており、この順で空間分解能が高いことが分かる。
【0191】
(実施例7)
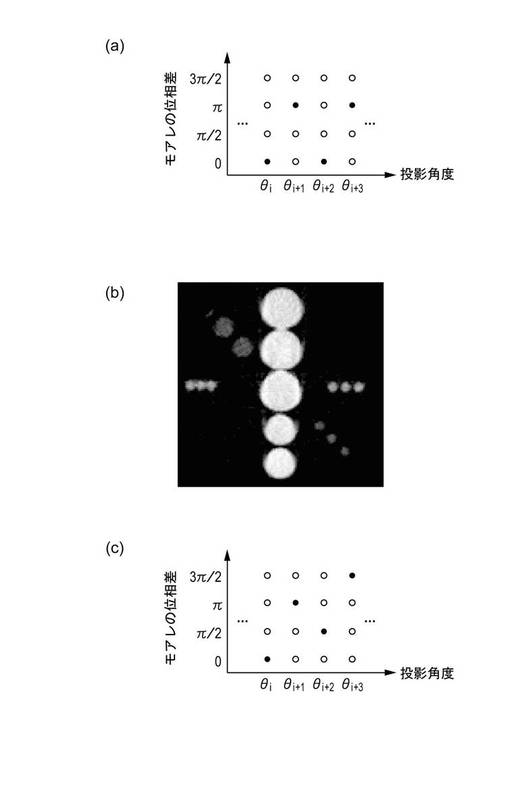
実施例7では、実施例6とは異なる方法でモアレを検出し、そのモアレから実施形態1に示した解析手法を用いて投影微分位相像を求め、さらにその投影微分位相像から断層位相像を求めた具体例を説明する。ただし、投影微分位相像から断層位相像を求める方法は実施例6と同様である。本実施例におけるモアレの検出方法は、実施例6で説明したモアレの検出方法が抱える課題を解決している。実施例6の方法では、各投影角度で複数のモアレを検出するため、各投影角度で被検体の回転を停止させなければならないという課題がある。本実施例では、各投影角度において検出するモアレを一つにすることで、被検体の一連の撮像中に被検体の回転を停止させる必要をなくした。つまり、本実施例のようにモアレを検出すれば、被検体を連続的に回転させながら断層像を求めるための撮像を行うことができる。本実施例の、各投影角度におけるモアレの検出位置を図19(a)に示した。ここでは、投影微分位相像の2種類の求め方を説明する。
【0192】
投影微分位相像の1番目の求め方を説明する。図19(a)の見方は図17(a)と同様であり、図中の黒丸(●)で表わした投影角度、位相差の位置でモアレを検出し、白丸(〇)で表した投影角度、位相差の位置ではモアレを検出しないことを示す。図19(a)が示すように、まず、第1の投影角度θiで基準となる第1のモアレを取得する。次に、第2の投影角度θi+1で第2のモアレを取得する。第2のモアレは、基準となるモアレに対して、被検体の回転軸および投影方向と垂直方向に位相がπずれている。これら2つのモアレから実施形態1に示した解析手法を用いて、投影角度θiにおける投影微分位相像を取得する。つまり、第1のモアレから仮想モアレである第3のモアレを、第2のモアレから仮想モアレである第4のモアレを夫々得て、合計4枚のモアレを用いて第1の投影角度θiにおける投影位相像を得る。同様に、第3の投影角度θi+2および第4の投影角度θi+3で検出したモアレより、第3の投影角度θi+2における投影微分位相像を取得できる。第2と第4の投影角度θi+1とθi+3における投影微分位相像は取得しない。すなわち求める投影微分位相像の数は、検出したモアレの数の半分である。尚、第1と第2の投影角度θi、θi+1で検出したモアレから、第2の投影角度θi+1における投影微分位相像を求め、第3と第4の投影角度θi+2、θi+3で検出したモアレより、第4の投影角度θi+3における投影微分位相像を取得しても良い。また、図19(a)では第1の投影角度θiと第3の投影角度θi+2において検出するモアレの位相差が0であるように表わされているが、位相差は0である必要はなく、例えば図19(c)に示した投影角度と位相差でモアレを検出しても良い。
【0193】
次に、投影微分位相像の2番目の求め方を説明する。2番目の求め方では、第2の投影角度θi+1および第4の投影角度θi+3における投影微分位相像も求める。モアレを検出する投影角度と位相差は図19(a)と同じである。また、第1の投影角度θiおよび第3の投影角度θi+2における投影微分位相を求める方法も1番目の方法と同じである。ただし、2番目の方法では、第2の投影角度θi+1および第3の投影角度θi+2で検出したモアレを用いて第2の投影角度θi+1の投影微分位相像を求める。同様に、第4の投影角度θi+3および第5の投影角度θi+4で検出したモアレを用いて第4の投影角度θi+3の投影微分位相像を求める。投影微分位相像の求め方は1番目の方法で第1の投影角度θiおよび第3の投影角度θi+2の投影微分位相像を求めた方法と同じである。尚、2番目の方法では、第2の投影角度θi+1における投影微分位相像を求めるため、第2の投影角度θi+1で検出するモアレは第3の投影角度θi+2で検出するモアレに対して、位相がπずれるようにすることが好ましい。この2番目の方法では、求められる投影微分位相像の数は、検出したモアレの数と同じである。
【0194】
ここで説明した2種類の投影微分位相像を求める方法は、異なる投影角度で検出したモアレを、同じ投影角度で検出したモアレかのように扱う方法である。そのため、実施例6で説明した方法に比べて、像の歪みやぼけが生じる可能性があるが、上述のように一連の撮像中に装置の回転を停止する必要がないというメリットがある。
【0195】
上述1番目の方法で求めた投影微分位相像より断層位相像を求めるシミュレーションを行う。本シミュレーションに用いた波面測定装置と被検体は実施例6のものであるとし、被検体を1.40625度刻みで180度回転させて128方向から撮像した点も実施例6と同様である。ただし、各投影角度で検出するモアレは一つであり、各投影角度で検出するモアレの位相差は本実施例内で説明したとおり図19(a)で示したようにする。128方向から撮像したモアレより得られる64方向の投影微分位相像より、式(26)に従い求めた断層位相像を図19(b)に示した。
【0196】
(比較例7)
比較例7では、比較例5とは異なる方法で取得したモアレから位相シフト法を用いて求めた投影微分位相像より断層位相像を取得した例を説明する。ここでも、2種類の求め方を説明する。
【0197】
まず、投影微分位相像の1番目の求め方を説明する。この方法は、I.Zanette,et al.,Applied Physics Letters 98,094101(2011)に記載の方法である。各投影角度におけるモアレの検出位置を図25(a)に示した。図25(a)は図17(a)と同様に、図中の黒丸(●)で表わした投影角度、位相差の位置でモアレを検出し、白丸(〇)で表した投影角度、位相差の位置ではモアレを検出しないことを示す。まず、第1の投影角度θiで基準となるモアレを取得する。次に、第2の投影角度θi+1で第2のモアレを取得する。第2のモアレは、基準となるモアレに対して、被検体の回転軸と垂直方向に位相がπ/2ずれている。次に、第3の投影角度θi+2で第3のモアレを取得する。第3のモアレは、基準となるモアレに対して、被検体の回転軸と垂直方向に位相がπずれている。さらに、第4の投影角度θi+3で第4のモアレを取得する。第4のモアレは、基準となるモアレに対して、被検体の回転軸と垂直方向に位相が3π/2ずれている。こうして検出した4つのモアレから比較例1に示した解析手法を用いて、投影角度θiにおける投影微分位相像を取得する。同様にして、第5の投影角度θi+4における投影微分位相像を求める。図25(a)では第1の投影角度θiと第5の投影角度θi+4の位相差が0であるように表わされているが、位相差は0である必要はない。また、この方法では、第2、第3、第4の投影角度θi+1、θi+2、θi+3における投影微分位相像は求めない。すなわち求める投影微分位相像の数は、検出したモアレの数の1/4である。
【0198】
次に、投影微分位相像の2番目の求め方を説明する。2番目の求め方では、第2、第3、第4の投影角度θi+1、θi+2、θi+3における投影微分位相像も取得する。モアレを検出する投影角度と位相差は図25(a)と同じである。また、第1の投影角度θiにおける投影微分位相を求める方法も1番目の方法と同じである。ただし、2番目の方法では、投影角度θi+1、θi+2、θi+3、θi+4で検出したモアレを用いて第2の投影角度θi+1の投影微分位相像を求める。同様に、投影角度θi+2、θi+3の投影微分位相像も求める。そのため、第5の投影角度θi+4で取得するモアレは第4の投影角度θi+3で取得するモアレに対して、位相がπ/2ずれるようにすることが好ましい。この2番目の方法では、求める投影微分位相像の数は、検出したモアレの数と同じである。
【0199】
上述の1番目の方法で取得した投影微分位相像より断層位相像を求めるシミュレーションを行う。本シミュレーションに用いた波面測定装置、用いた被検体は実施例6と同様のものであるとし、被検体を1.40625度刻みで180度回転させて128方向から撮像した点も実施例6と同様である。ただし、各投影角度で検出するモアレは1つであり、各投影角度で取得するモアレの位相差は本比較例内で説明したとおりになっている。128方向から撮像したモアレより得られる32方向の投影微分位相像より、式(26)に従い求めた断層位相像を図25(b)に示した。
【0200】
実施例7および比較例7は、異なる投影角度で取得したモアレを同じ投影角度で取得したモアレとして扱い、投影微分位相像を取得している点が実施例6、比較例5および比較例6と異なる。このため、特に投影角度の刻みが粗い場合、被検体の回転中心から離れた点で、像が歪んだりぼけたりする可能性がある。実施例7と比較例7を比較すると、実施例7はこの影響を小さくする効果がある。比較例7では4つの投影角度で検出したモアレを用いて1つの投影角度における投影微分位相像を求めているのに対して、実施例7では2つの投影角度で検出したモアレより1つの投影角度における投影微分位相像を求めている。そのため、像が歪んだりぼけたりする場合でも、その影響を小さくすることができる。以上、断層像を求める際にも実施形態1による波面測定方法が適用できることを説明した。尚、実施例6と7では実施形態1に示した位相シフト法に基づいた方法により投影微分位相像を求めた例について説明をしたが、実施形態2に示した窓フーリエ変換法に基づいた方法により投影微分位相像を求め、その投影微分位相像から断層位相像を求めても良い。
【0201】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
【符号の説明】
【0202】
110 X線源
120 線源格子
130 被検体
140 回折格子
150 遮蔽格子
160 検出器
170 計算機
【技術分野】
【0001】
本発明は、波面測定装置、波面測定方法、及びそれに用いられるプログラム並びにX線撮像装置であり、特に被検体により変調された光周期パターンから波面情報を算出する、波面測定装置、波面測定方法、及びプログラム並びにX線撮像装置に関する。
【背景技術】
【0002】
光計測学では、光周期パターン(以下、単に周期パターンということがある。)の変調を解析することで被検体の情報を取得することがある。周期パターンの解析手法として、位相シフト法と窓フーリエ変換法が知られている。下記式(1)で表わすことのできる周期パターンI(x,y)を例にとり、位相シフト法と窓フーリエ変換法の概略を述べる。簡単のため、以下では1次元の周期パターンを考えるが、2次元の周期パターンも同様に考えることができる。
【0003】
【数1】
【0004】
a(x,y)はバックグラウンド周期パターン、b(x,y)は周期パターンの振幅分布、ωxは空間キャリア周波数、φ(x,y)は被検体の位相分布又は微分位相分布である。
【0005】
位相シフト法は、位相がシフトした複数の周期パターンを用いて被検体を透過した光の波面を測定し、被検体に関する情報を取得する手法であり、各画素で検出した光の強度から独立に被検体の情報が得られる点に特徴がある。例として、下記式(2)で表わされる互いに位相がシフトした3つの周期パターンから被検体の情報の抽出を考える。
【0006】
【数2】
【0007】
非特許文献1によれば、下記式(3)によって被検体の位相分布又は微分位相分布が求められる。ただし、arg[・]は[・]内の位相成分を表わす。
【0008】
【数3】
【0009】
求められる位相分布または微分位相分布は−πからπまでの間にラップ(畳み込み)された値となるため、アンラップを行う必要がある。
【0010】
このように、式(1)で表わすことのできる周期パターンの場合、3つ以上の周期パターンがあれば位相シフト法により被検体を透過した光の波面情報を算出することができ、被検体の位相分布又は微分位相分布が求められる。
【0011】
一方、窓フーリエ変換法は1つの周期パターンからでも被検体を透過した光の波面情報を算出できる点に特徴がある。窓フーリエ変換法の詳細は非特許文献2に記載されているので、この方法の概略を述べる。式(1)を下記式(4)のように変形する。
【0012】
【数4】
【0013】
窓フーリエ変換法では、周期パターンを窓関数により局所的に切り出したのち、0次スペクトルや空間キャリア周波数のフーリエ係数を求めることで被検体を透過した光の波面情報を算出する。すなわち、a(x,y)、c(x,y)、c*(x,y)は下記式(5)によって求められる。
【0014】
【数5】
【0015】
ただし、窓関数をg(x,y)、μ、νは積分変数とする。また、位相シフト法と同様に、求められる波面情報は−πからπまでの間にラップ(畳み込み)された値となるため、アンラップを行う必要がある。
【先行技術文献】
【非特許文献】
【0016】
【非特許文献1】Japanese Journal of Applied Physics,45,5254(2006)
【非特許文献2】Optis and Lasers in Engineering,45,304(2007)
【発明の概要】
【発明が解決しようとする課題】
【0017】
位相シフト法では、周期パターンが式(1)で表わされる場合、未知数が3つなので、互いに位相がシフトした周期パターンが最低で3つ必要である。さらに、2次元の周期パターンを用いて2方向における位相分布または微分位相分布を求めるためには、さらに多くの周期パターンが必要となる。
【0018】
一方、窓フーリエ変換法は1つの周期パターンから被検体の情報を得ることができるが、光の波面情報を各画素の検出結果から独立に算出しているのではなく、周辺画素の検出結果も用いて波面情報を算出している。そのため得られる波面情報の正確度が位相シフト法よりも低い。
【0019】
そこで、本発明は位相シフト法より少ない周期パターンからでも、窓フーリエ変換法より正確に波面情報を算出することが可能な波面測定方法、プログラムとそれを用いた波面測定装置とX線撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0020】
その目的を達成するために、本発明の一側面としての波面測定装置は、
光源からの光で光周期パターンを形成する光学素子と、前記光学素子からの光を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得する波面測定装置であって、前記検出器は、前記光学素子からの光で形成された第1の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンと、を検出し、前記算出手段は、前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出することを特徴とする。
【0021】
本発明のその他の側面については、以下で説明する実施の形態で明らかにする。
【発明の効果】
【0022】
本発明によれば、位相シフト法より少ない周期パターンから、窓フーリエ変換法より正確に被検体の情報を取得することが可能な波面測定方法、プログラムと、それを用いた波面測定装置とX線撮像装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】実施形態1の波面測定装置全体図。
【図2】実施形態1の波面測定方法の概念図。
【図3】実施形態2の波面測定方法の概念図。
【図4】実施例1及び2の線源格子の模式図。
【図5】実施例1及び2の位相格子の模式図。
【図6】実施例1及び2の遮蔽格子の模式図。
【図7】実施例1によるシミュレーション結果。
【図8】実施例2によるシミュレーション結果。
【図9】実施例2と比較例3、4によるシミュレーション結果のラインプロファイル。
【図10】実施例3によるシミュレーション結果。
【図11】実施例4によるシミュレーション結果。
【図12】実施例4と比較例3、4によるシミュレーション結果のラインプロファイル。
【図13】実施例5の装置全体図。
【図14】座標軸の取り方を示す図。
【図15】実施例6及び実施例7の装置全体図。
【図16】実施例6及び実施例7で用いた被検体。
【図17】実施例6におけるモアレ取得方法とシミュレーション結果を示す図。
【図18】実施例6と比較例5、6によるシミュレーション結果のラインプロファイル。
【図19】実施例7におけるモアレ取得方法とシミュレーション結果を示す図。
【図20】比較例1によるシミュレーション結果。
【図21】比較例2によるシミュレーション結果。
【図22】比較例3によるシミュレーション結果。
【図23】比較例4によるシミュレーション結果。
【図24】比較例5及び比較例6におけるモアレ取得方法とシミュレーション結果。
【図25】比較例7におけるモアレ取得方法とシミュレーション結果を示す図。
【発明を実施するための形態】
【0024】
本発明の好ましい実施形態として実施形態1と実施形態2を添付の図面に基づいて説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。尚、実施形態1と2に共通することは、光の周期パターン(光周期パターン)を複数回検出し、複数の光周期パターンから仮想的な光周期パターンを求め、仮想的な光周期パターンを用いて光の波面の情報を求めることである。
【0025】
(実施形態1)
実施形態1では位相シフト法を基にした、被検体を透過した光の波面測定を行う波面測定装置について説明をする。
【0026】
また、本実施形態の波面測定装置は、トールボットラウ干渉法を用いたX線位相イメージングを行うX線撮像装置(以下、X線位相イメージング装置と呼ぶことがある。)である。ただし、本発明はトールボットラウ干渉法に限定されるものでも、X線位相イメージングを行う波面測定装置に限定されるものでもなく、被検体による周期的なパターンの変調を計測する技術一般に適用することができる。
【0027】
トールボットラウ干渉法を用いたX線位相イメージング装置については、Proc.SPIE 6318,63180S(2006)に記載があるので概略のみ記載する。本実施形態におけるトールボットラウ干渉法を用いたX線位相イメージング装置の模式図を図1に示した。
【0028】
本実施形態の波面測定装置1は、光源としてX線源110、X線源からのX線をビーム状に分割する線源格子120、位相型の回折格子(以下、位相格子と呼ぶことがある。)140、遮蔽格子150を備える。位相格子140および遮蔽格子150は、線源格子120からのX線で周期パターンを形成するための光学素子である。また、波面測定装置1は、遮蔽格子からのX線を検出する検出器160と、検出器160の検出結果に基づいて計算を行う演算部として計算機170を備える。更に、波面測定装置1は、線源格子、回折格子、遮蔽格子、検出器のうち少なくとも1つを移動させる移動部としてアクチュエーター180と、を備えている。
【0029】
各構成について説明をする。
【0030】
光源(X線源)110からのX線は線源格子120に照射される。
【0031】
線源格子120はX線透過部とX線遮蔽部を有しており、X線源110からのX線をビーム状に分割する。
【0032】
線源格子120により分割されたX線は被検体130に照射され、被検体130を透過したX線が回折格子により回折される。
【0033】
位相格子140はX線の位相を周期的に変化させる位相型の回折格子であり、位相基準部と位相シフト部が周期的に配列されている。位相格子140が被検体130を透過したX線を回折すると、トールボット距離と呼ばれる所定の距離に光(X線)の干渉パターンを形成する。この干渉パターンは光周期パターン(X線周期パターン)である。尚、本明細書における周期パターンとは、被検体が光源と周期パターンの間に配置されていないときでも一定の周期をもたないパターンも含む。例えば、周期パターンの中心から離れるにしたがって周期が徐々に変化するようなパターンであっても周期パターンという。
【0034】
遮蔽格子150は、遮蔽格子150上に干渉パターンが形成されるように、位相格子140とトールボット距離はなれた位置に配置される。遮蔽格子150は光(X線)遮蔽部(以下、遮蔽部)と光(X線)透過部(以下、透過部)とが周期的に配列されている。遮蔽部と透過部とが配列された周期は、遮蔽格子150上に形成される干渉パターンの周期とわずかに異なるため、遮蔽格子150を透過したX線は、X線周期パターンであるモアレを形成する。本実施形態では位相格子140と遮蔽格子150により形成されたモアレを検出し、このモアレから被検体の情報を求める。
【0035】
検出器160は光(X線)の強度を検出する画素を複数有しており、遮蔽格子150からの光で形成されたモアレを検出する。
【0036】
計算機170は検出器160による検出結果に基づいて、モアレを形成する光の波面の複数の位置における波面情報を算出する。但し、ここで算出する波面情報とは、位相、微分位相、振幅、散乱の少なくとも1つを指す。モアレを形成する光は被検体130による変調を受けているため、計算機170で算出した光の波面情報は被検体の情報を有している。
【0037】
計算機170による解析方法については下記で説明をする。
【0038】
アクチュエーター180は線源格子120、位相格子140、遮蔽格子150、のうち少なくとも1つを移動させることで、干渉パターンと遮蔽格子を相対的に移動又は回転させる。移動と回転の両方を行っても良い。これにより、モアレの位相をシフトさせることができる。尚、移動は位置を変化させる移動でもチルトを変化させる回転移動でも良い。また、本実施形態では干渉パターンと遮蔽格子を相対的に移動、回転させるが、移動部はモアレ(干渉パターン)の位相をシフトさせることができれば良い。例えば検出器160を移動させてもモアレの位相をシフトさせることができる。
【0039】
本実施形態の計算機170による波面情報を算出する解析方法について説明をする。
【0040】
上述のように、本実施形態では、位相シフト法を基にした解析方法について述べる。
【0041】
本実施形態の計算機170は、検出器160によって検出される第1の光周期パターン(第1のX線周期パターン)と、第1の光周期パターンと位相が異なる第2の光周期パターン(第2のX線周期パターン)を用いて波面情報を算出し、被検体の情報を得る。第1の光周期パターンと第2の光周期パターンは共に、遮蔽格子150を透過して形成されるモアレである。また、本実施形態では、第1の光周期パターンを検出した後、アクチュエーターにより干渉パターンと遮蔽格子を相対的に移動させてモアレの位相をシフトさせ、再度検出器でモアレを検出すると第2の光周期パターンを検出することができる。但し、干渉パターンと遮蔽格子の相対移動距離が干渉パターンまたは遮蔽格子の周期の整数倍と等しいと、形成されるモアレの位相がシフトしない(シフト量が2πの整数倍になる。)ため、第2の光周期パターンを検出することができない。(第1の光周期パターンが再度検出される。)従って、干渉パターンと遮蔽格子の位置を変化させる相対移動を行うことでモアレの位相をシフトさせる場合は、干渉パターンと遮蔽格子の相対移動距離が干渉パターンと遮蔽格子の周期の整数倍と等しくならないように移動させる。
【0042】
ここで、第1の光周期パターンのモアレをI1、第2の光周期パターンのモアレをI2と表す。
【0043】
本実施形態では、下記式(6)で表わされるI1とI2から被検体の情報を求める。
【0044】
【数6】
【0045】
ただし、a(x,y)はバックグラウンド周期パターン、b(x,y)はモアレの振幅分布、ωxは空間キャリア周波数、ωxαはI1とI2の位相シフト量(位相差)、φ(x、y)は被検体の微分位相分布である。また、x、yの単位は画素(ピクセル)とする。
【0046】
I1、I2から下記式(7)で表わされる仮想的なモアレ(以下、仮想モアレと呼ぶ)I3、I4を得ることができる。
【0047】
【数7】
【0048】
ただし、m、nは0以外の整数であり、mとnは同じ数でも異なった数でも良い。ωxに対してa(x,y)、b(x,y)、φ(x,y)の変化が十分に緩やかであるとき、式(7)は下記式(8)に変形できる。
【0049】
【数8】
【0050】
式(6)、式(7)および式(8)をまとめて下記式(9)のように書き換える。
【0051】
【数9】
【0052】
さらに、式(9)を行列表示すると、下記式(10)になる。
【0053】
【数10】
【0054】
よって、行列Aの疑似逆行列をA−1と表わすとすると、下記式(11)よりa(x,y)、c(x,y)、c*(x,y)が求められ、c(x,y)とc*(x,y)からb(x,y)、φ(x,y)を求めることができる。
【0055】
【数11】
【0056】
このように、第1の光周期パターン(I1)、第2の光周期パターン(I2)から、1つの位置(x、y)における波面情報を算出することができる。
【0057】
トールボットラウ干渉計はシアリング干渉計であるため、波面情報を微分したもの(微分波面情報)が得られる。そのため、求めたφ(x,y)をマッピングすることで被検体の微分位相像が求められる。更に微分位相像から位相像を、a(x,y)とb(x、y)から被検体の吸収像、散乱像を求めることができる。尚、トールボットラウ干渉計はシアリング干渉計であるため、本実施形態のφ(x、y)は被検体の微分位相分布を示すが、マイケルソン干渉計やフィゾー干渉計などのシアリング干渉計でない干渉計を用いるとφ(x、y)は被検体の位相分布を示す。そのため、シアリング干渉計でない干渉計を用いて得られたφ(x、y)をマッピングすると位相像が得られる。
【0058】
本実施形態の計算機170による解析方法の概念を図2に示した。図2(a)は、上記のように、I1からI3を、I2からI4を取得し、実際に検出したモアレ(I1、I2)と仮想モアレ(I3、I4)を用いて位相シフト法を行うことで被検体の情報を取得していることを示した図である。
【0059】
I1からI3を取得する方法は式(7)を用いており、I3内の特定の座標(x、y)におけるX線(光)の強度はI1内の特定の座標(x、y)と異なる座標(x−m、y)におけるX線の強度であるとした。I2からI4を取得する方法も同様である。
【0060】
図2(b)に、これを示した計算機170による解析方法を示す。
【0061】
図2(b)にはmとnを共に+1とした場合の本実施形態の計算機170による解析方法の概念を示す。図2(b)のように、I1とI2夫々の(x、y)、I3の(x、y)としてI1の(x+1、y)、I4の(x、y)としてI2の(x+1、y)におけるX線の強度の検出結果を用いて位相シフト法を行うことで、(x、y)における被検体の情報を取得する。
【0062】
本実施形態に用いられる解析方法を別の表現で説明をするために、(x、y)におけるX線の強度を検出する画素を第1の画素、(x−m、y)におけるX線の強度を検出する画素を第2の画素とする。更に、mとnが同じ値をとるとする。本実施形態では、第1の光周期パターン(I1)検出時の第1の画素の検出結果(I1(x、y))と、I1検出時の第2の画素の検出結果(I1(x+m、y))と、第2の光周期パターン(I2)検出時の第1の画素の検出結果(I2(x、y))と、I2検出時の第2の画素の検出結果(I2(x+n、y))を、それぞれ、I1、I3、I2、I4検出時の第1の画素((x、y))の検出結果とみなして位相を回復することにより、波面情報を算出する。尚、I1、I3、I2、I4検出時の第1の画素((x、y))の検出結果とみなして位相を回復するとは、I1、I3、I2、I4検出時の第1の画素((x、y))の検出結果として位相シフト法に用いられる計算方法を用いて位相を回復することである。位相シフト法に用いられる計算方法は上述の式(11)を用いても良いし、その他の計算方法を用いても良い。
【0063】
これにより、第1の画素に入射したX線(光)の波面情報を算出することができる。また、I1(x、y)と、I1(x+m、y)と、I2(x、y)と、I2(x+n、y)を、それぞれI1、I3、I2、I4検出時の第2の画素の検出結果とみなして位相シフト法を行っても良い。すると、第2の画素に入射したX線(光)の波面情報を算出することができる。但し、この時、第1の画素の検出結果とみなしても、第2の画素の検出結果とみなしても算出される波面情報は同じである。
【0064】
また、mとnは異なる値をとることもできる。例えば、I1検出時の第1の画素の検出結果と、I1検出時の第2の画素の検出結果と、I2検出時の第1の画素の検出結果と、I2検出時の第1の画素でも第2の画素でもない画素の検出結果を用いても、本実施形態と同様に解析と行うことができる。その場合、上記4つの検出結果がそれぞれ、I1、I3、I2、I4検出時の第1の画素の検出結果とみなして位相シフト法を行えばよい。
【0065】
また、I1とI2の位相差(ωxα)が、第1の画素が検出する光と第2の画素が検出する光の位相差と等しい場合でも、I1(x、y)、I1(x+m、y)、I2(x、y)、I2(x+n、y)を用いて位相シフト法を行うことができる。
【0066】
この場合、I1(x+m、y)とI2(x、y)が同じ(厳密には被検体の異なる部分を透過したX線なのでわずかに異なる。)である。そこで、I1(x+m、y)、I2(x、y)、I1(x+m、y)とI2(x、y)の平均、の3つのうちどれか1つをI2(x、y)、I1(x、y)をI1(x、y)、I2(x+n、y)をI3(x、y)として位相シフト法を行えばよい。モアレを表す式が、式(1)のように未知数を3つ持つ場合、仮想モアレを含めて3つ以上のモアレがあれば本実施形態の計算機170が行う解析方法を行うことができる。尚、仮想モアレを含めて3つ以上のモアレがあれば位相シフト法を用いることができるのは、上述のように、mとnは0以外の整数でればよく、+1に限定はされない。しかし、mとnの絶対値が小さい方がa(x,y)、b(x,y)、φ(x,y)の変化が緩やかであるため好ましい。mとnの絶対値の好ましい範囲は1〜3であり、さらに好ましくは1である。さらにm=nであることが好ましい。
【0067】
mとnの絶対値が3のとき、第2の画素は第1の画素から3画素の位置に配置されている。また、mとnの絶対値が1のとき、第2の画素は第1の画素に隣接している。このように、第1の画素と第2の画素が隣接しているとき、第2の画素は第1の画素から1画素の位置に配置されているとする。
【0068】
一般的な位相シフト法において用いる周期パターン毎の位相シフト量は同じであることが好ましい。例えば4枚のモアレを用いて解析する場合は、夫々のモアレの位相シフト量が1/2πずつになることが好ましい。本実施形態も同様に、I1、I2、I3、I4の位相シフト量が同じになることが好ましい。そのためには、m=n=±1とし、画素サイズを単位とするモアレ(周期パターン)の周期をP(モアレの周期80μm、画素サイズ20μmのとき、P=4)とすると、α=P/2を満たすようなI1とI2を用いて解析を行えばよい。
【0069】
つまり本実施形態は、第1の光周期パターン(I1)と第2の光周期パターン(I2)から第1の仮想周期パターン(I3)と第2の仮想周期パターン(I4)を算出し、4つの周期パターンに位相シフト法を適用することで被検体の情報を得る。
【0070】
以上、計算機170による第1の光周期パターンと第2の光周期パターンの解析方法について説明をした。上述のような計算を計算機170で行うには、上述のような計算を実行させるプログラムを計算機170に組み込めばよい。
【0071】
また、本実施形態では遮蔽格子を用いてモアレを形成し、このモアレを検出、解析したが、干渉パターンを直接検出し、解析を行っても良い。
【0072】
本実施形態のように遮蔽格子を用いると、干渉パターンのピッチよりも分解能が大きい検出器を用いることができる。
【0073】
(実施形態2)
実施形態2では、窓フーリエ変換法を基にした波面測定方法を用いて波面情報を算出する方法について説明をする。
【0074】
本実施形態の構成は計算機による計算方法が実施形態1と異なり、そのほかの構成は実施形態1と同じである。
【0075】
本実施形態の計算機も、実施形態1と同様、検出器160によって検出される第1の光周期パターンと、第1の光周期パターンと位相差がある第2の光周期パターンから仮想的な光周期パターンを算出し、この仮想的な光周期パターンを解析して波面情報を算出する。但し、仮想的な光周期パターンの算出方法と、仮想的な光周期パターンから波面情報を算出する解析方法は実施形態1と異なる。実施形態1と同様、第1の光周期パターンと第2の光周期パターンは共に、遮蔽格子150を透過して形成されるモアレの周期パターンであり、本実施形態では、第1の光周期パターンのモアレをI5、第2の光周期パターンのモアレをI6と表す。
【0076】
本実施形態では、下記式(12)で表わされるI5とI6から波面情報を算出する。
【0077】
【数12】
【0078】
但し、ωxαはI5とI6の位相差であり、αは0以外の整数である。
【0079】
モアレI5(x、y)、I6(x、y)、を合成することで仮想モアレI(x、y)を算出する。以下、モアレを合成することで算出した仮想モアレのことを、合成モアレ(合成光周期パターン)と呼ぶことがある。ピクセル(x0,y0)での被検体の情報を得る場合は、I(x、y)は例えば式(13)で表わされる。
【0080】
【数13】
【0081】
但し、[X]は床関数であり、X以下の最大の整数を表す。(例 [2.5]=2、[2]=2)
また、Pは、画素サイズを単位とするモアレの周期を表す。
【0082】
P−αが偶数のときは、以下の式を用いても良い。
【0083】
【数14】
【0084】
算出したI(x、y)より式(5)に基づいて微分位相像を求めることができる。
【0085】
窓関数は種々の窓関数を用いることができるが、本実施形態ではガウス関数を用いた。また、本実施形態では、モアレを窓関数により局所的に切り出した後、フーリエ係数から被検体の情報を取得している。しかし、モアレをフーリエ変換してフーリエスペクトルのピークを切り出した後、フーリエ逆変換を施すことでモアレによるチルトを消去し、被検体の情報を取得してもよい。これを式に示すと、下記式(15)のようになる。
【0086】
【数15】
【0087】
ただし、G(ζ,η)を窓関数、IS(ζ,η)をモアレI(x、y)のフーリエスペクトル、ζ,ηは空間周波数とする。また、フーリエ逆変換をF−1で示す。
【0088】
本実施形態の計算機による解析方法の概念を図3に示した。図3は、上記のように、I5(x、y)、I6(x、y)、を用いてI(x、y)を算出する概念を示したものである。尚、図3では、α=2、P=4、P−αは偶数であるが、式(13)を用いた。
【0089】
本実施形態に用いられる解析方法を別の表現で説明をするために、(x0、y)におけるX線の強度を検出する画素を第1の画素、(x0−1、y)におけるX線の強度を検出する画素を第2の画素とする。本実施形態では、I5検出時の第1の画素の検出結果(I5(x0、y))をI検出時の第1の画素の検出結果(I(x0、y))、I5検出時の第2の画素の検出結果(I5(x0−1、y))をI検出時の第2の画素の検出結果(I(x0−1、y))とした。また、I6検出時の第1の画素の検出結果(I6(x0、y))はI検出時の第1の画素でも第2の画素でもない画素の検出結果(I(x0+P−α、y))とすることでI5とI6を用いて合成モアレIを算出する。そして、合成モアレIとフーリエ変換を用いて1つの位置(x0、y)におけるX線の波面情報を算出することができる。これにより被検体の情報を取得することができる。
【0090】
つまり本実施形態では、第1の光周期パターン検出時の第1の画素の検出結果と、第1の光周期パターン検出時の第2の画素の検出結果と、第2の光周期パターン検出時の第1の画素の検出結果が、1つの周期パターン(合成周期パターン)に由来するものとみなす。そしてこの合成周期パターンに、フーリエ変換を行うことで被検体に関する情報を算出している。
【0091】
I5検出時に第1の画素に入射するX線と、I6検出時に第1の画素に入射するX線は被検体の(ほぼ)同じ個所を透過したX線である。よって、I5検出時に第1の画素に入射するX線と、I6検出時に第1の画素に入射するX線が有している被検体の情報は(ほぼ)同じである。
【0092】
一方、一般的に用いられる窓関数は、中心ほど振幅が大きい。よって、(x0、y)に入射したX線(光)の、波面情報を算出するときには、I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果が、合成モアレIの、窓関数の中心の近くにある方が正確な値を算出することができる。
【0093】
そのためには、I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果が近くにある方が良い。I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果の、合成モアレ内(合成周期パターン内)での距離はP−αなので、P−αは小さい方が好ましく、具体的には3以下が好ましい。
【0094】
P−αが3以下であるとき、I5検出時の第1の画素の検出結果とI6検出時の第1の画素の検出結果は合成モアレI内で3画素以内に配置される。
【0095】
P−αが1のとき、合成モアレ内で、第1の画素の検出結果同士が隣接する。
【0096】
尚、本明細書において被検体の情報とは、被検体を透過したX線(光)の波面情報から得られる情報であり、被検体の吸収、散乱、位相に関する情報である。各画素に入射したX線(光)毎に、X線の波面情報を算出することで複数の位置における光の波面情報を算出することができる。また、1つの位置における波面情報から得られる被検体の情報を複数求めてマッピングすることにより、被検体の吸収像、散乱像、微分位相像、位相像を得ることができる。
【0097】
(実施例1)
実施例1では実施形態1に示した波面測定装置を用いて、1方向に周期をもつモアレ(1次元モアレ)を用いて1方向の微分位相像をシミュレーションによって求めた具体例を説明する。
【0098】
本実施例の波面測定装置は、実施形態1と同様、図1に示した波面測定装置である。具体的な構成について説明をする。
【0099】
本実施例のX線源110の焦点の大きさは100μmであり、X線源110より照射されるX線のエネルギーは17.5keVとした。
【0100】
本実施例に用いる線源格子120の模式図を図4に示した。本実施例の線源格子120は、透過部121と遮蔽部122が2次元に配列された2次元格子であり、格子周期は40μm、透過部121の幅は5μmであるとした。
【0101】
本実施例に用いる回折格子の模式図を図5(a)に示した。本実施例の回折格子は、1次元の位相格子140aであり、位相基準部141aと位相シフト部142aが8μm周期で配列されている。位相格子140aは、位相基準部141aを透過したX線と、位相シフト部142aを透過したX線の位相差がπになるように構成されており、このような格子を以下、π格子と呼ぶ。
【0102】
本実施例に用いる遮蔽格子の模式図を図6(a)に示した。本実施例の遮蔽格子150aは遮蔽部151aと透過部152aとが4.58μm周期で配列されている。遮蔽格子150aは位相格子140aと遮蔽格子150aとの間の距離が線源格子120と位相格子140aとの間の距離の1/10になるように配置されている。
【0103】
検出器160には、X線の強度を検出する8×8μm2の画素が2次元に配列されており、遮蔽格子150aからのX線を検出する。位相格子140aと遮蔽格子150aにより形成されるモアレの周期は検出器上32μmであり、検出器の4画素がモアレの1周期になるようにした。
【0104】
被検体は直径250μmのファイバー4本であり、複素屈折率は6.70×10−8−i×9.07×10−11とした。
【0105】
本実施例の計算機による解析方法について説明をする。
便宜上I1、I2として式(16)で表わされる2つのモアレを用いて被検体の微分位相像を求めた。
【0106】
【数16】
【0107】
式(7)のmとnを共に+1とし、式(16)から仮想モアレI3、I4を下記式(17)のように示す。
【0108】
【数17】
【0109】
式(16)と式(17)を式(11)に代入して被検体の微分位相像を取得した。図7(a)は本実施例により得られた被検体の微分位相像、図7(b)は図7(a)の微分位相像のラインプロファイルである。
【0110】
(比較例1)
比較例1では、位相シフト法を用いて被検体の微分位相像を取得した例について説明をする。
【0111】
本比較例の波面測定装置は、計算機以外は実施例1と同じであるとし、実施例1と同じ被検体を用いてシミュレーションを行った。
【0112】
本比較例における計算機で行われる解析方法について説明をする。
【0113】
本比較例では、下記式(18)で示される4つのモアレと式(3)を用いて微分位相像を求めた。
【0114】
【数18】
【0115】
図20(a)は本比較例により取得された微分位相像であり、図20(b)は図20(a)に示した微分位相像のラインプロファイルである。
【0116】
本比較例では、4つのモアレを用いて各画素で独立に被検体の情報を取得するのに対して、実施例1では2つのモアレを用いて、各画素と、その画素に隣接する画素の検出結果も利用している。これらにより、位相シフト法では最低でも3つのモアレが必要であるのに対して、実施例1では2つのモアレから被検体の情報を求められる。
【0117】
(比較例2)
比較例2では、窓フーリエ変換法を用いて被検体の微分位相像を取得した例について説明をする。
【0118】
本比較例の波面測定装置も計算機以外は実施例1と同じであるとし、実施例1と同じ被検体を用いてシミュレーションを行った。
【0119】
本比較例における計算機で行われる解析方法について説明をする。
【0120】
本比較例では上記式(18)のI7および、式(5)を用いた。また、窓関数としてガウス関数を用いた。また、波数空間上において、式(5)に示したa(x,y)、c(x,y)、c*(x,y)、のスペクトルが、互いにオーバーラップするため、それらは分離した。
【0121】
図21(a)は本比較例により取得された微分位相像であり、図21(b)は図21(a)に示した微分位相像のラインプロファイルである。図7と図21を図20と比較すると、比較例2よりも実施例1のほうが比較例1に近い微分位相像が得られたことが分かる。そのため、本比較例よりも実施例1の方が正確に近い被検体の微分位相像が取得できると考えられる。
【0122】
(実施例2)
実施例2では実施形態1に示した波面測定装置を用いて、x方向とy方向の2方向に周期をもつモアレ(2次元モアレ)を用いてx方向の微分位相像とy方向の微分位相像をシミュレーションによって求めた具体例を説明する。2次元モアレを用いてx方向の微分位相像とy方向の微分位相像を算出する場合も、1次元と同様の計算を2方向に対して行えばよいため、実施例1と重複する部分は省略する。
【0123】
X線源110、線源格子120、検出器160は実施例1と同じものを用いた。
【0124】
本実施例に用いる回折格子の模式図を図5(b)に示した。本実施例の回折格子は、2次元の位相格子140bであり、位相基準部141bと位相シフト部142bが2次元に8μm周期で配列されている。また、実施例1と同様π格子である。
【0125】
本実施例に用いる遮蔽格子の模式図を図6(b)に示した。本実施例の遮蔽格子150bは遮蔽部151bと透過部152bとが2次元に4.58μm周期で配列されている。また、実施例1と同様、位相格子140bと遮蔽格子150bとの間の距離が線源格子120と位相格子140bとの間の距離の1/10になるように遮蔽格子150bを配置する。
【0126】
被検体は直径800μmの球体であり、複素屈折率は7.77×10−8−i×9.42×10−11とした。
【0127】
本実施例では、基準となるモアレ(第1の光周期パターン)と、基準となるモアレに対してx方向に位相がπずれたモアレ(第2の光周期パターン)を用いてx方向の微分位相像を求めた。更に、基準となるモアレ(第1の光周期パターン)と、基準となるモアレに対してy方向にπずれたモアレ(第3の光周期パターン)を用いてy方向の微分位相像を求めた。つまり、合計3つのモアレを用いて、x方向とy方向の微分位相像を求めた。言うまでもないがこのとき、第1の光周期パターンに対する第2の光周期パターンの位相のシフト方向(x方向)と、第1の光周期パターンに対する第3の光周期パターンの位相のシフト方向(y方向)は垂直に交わっている。それぞれの微分位相像の求め方は実施例1と同様であるが、以下簡単に説明をする。
【0128】
本実施例に用いられる解析方法を説明をするために、(x、y)におけるX線の強度を検出する画素を第1の画素、(x−m、y)におけるX線の強度を検出する画素を第2の画素、(x、y−q)におけるX線の強度を検出する画素を第3の画素、とする。
【0129】
本実施例では、第1の光周期パターン検出時の第1の画素と第2の画素の検出結果と、第2の光周期パターン検出時の第1の画素と第2の画素の検出結果を用いてx方向の微分位相像を算出する。
【0130】
更に、第1の光周期パターン検出時の第1の画素と第3の画素の検出結果と、第3の光周期パターン検出時の第1の画素と第3の画素の検出結果を用いてy方向の微分位相像を算出する。
【0131】
図8の(a)は第1の光周期パターンと第2の光周期パターンを用いて得た、x方向の微分位相像である。また、図8の(b)は第1の光周期パターンと第3の光周期パターンを用いて得た、y方向の微分位相像である。このように、実施例3では3つのモアレから2次元の微分位相像を得ることができた。
【0132】
(比較例3)
比較例3では、位相シフト法を用いて被検体の2次元の微分位相像を取得した例について説明をする。
【0133】
本比較例の波面測定装置は計算機以外は実施例2と同じであるとし、実施例2と同じ被検体を用いてシミュレーションを行った。
【0134】
本比較例における計算機で行われる解析方法について説明をする。
本比較例によるx方向の微分位相像は、式(3)を用い、x方向に位相が0.5πずつずれた4つのモアレから得た。y方向の微分位相像も同様に式(3)を用い、y方向に位相が0.5πずつずれた4つのモアレから求めた。つまり合計で7つのモアレから2方向の微分位相像を求めた。
【0135】
図22の(a)と(b)はそれぞれ、本比較例により得られたx方向とy方向の微分位相像である。尚、位相シフト法を用いて2次元の微分位相像を取得する場合、5つ以上のモアレが必要である。
【0136】
(比較例4)
比較例4では、窓フーリエ変換法を用いて被検体の2次元の微分位相像を取得した例について説明をする。本比較例の波面測定装置も計算機以外は実施例2と同じであるとし、実施例2と同じ被検体を用いてシミュレーションを行った。
【0137】
本比較例における計算機で行われる解析方法について説明をする。
【0138】
本比較例によるx方向とy方向の微分位相像は、式(5)を用いて1つのモアレから求めた。但し、窓関数としてガウス関数を用い、波数空間上においてa(x,y)、c(x,y)、c*(x,y)、のスペクトルは、オーバーラップしたため分離した。
【0139】
図23の(a)と(b)はそれぞれ、本比較例により得られたx方向とy方向の微分位相像である。
【0140】
実施例2と、比較例3、4により得られた被検体のX方向の微分位相像を用いてラインプロファイルを作成したものを図9((a)、(b))に示した。図9(a)が被検体の左端のラインプロファイル、図9(b)が被検体の右端のラインプロファイルである。3つの線はそれぞれ、実線が実施例2で得られた微分位相像、破線が比較例3で得られた微分位相像、一点鎖線が比較例4で得られた微分位相像、のラインプロファイルである。図9を見ると、実施例2の方が比較例4よりも比較例3と近い結果が得られており、より正確に近い微分位相像を得られていると考えられる。
【0141】
(実施例3)
実施例3では、実施形態2に示した解析方法を行う波面測定装置を用いて、1方向に周期をもつモアレ(1次元モアレ)を用いて1次元の微分位相像(位相像を1方向に微分した像)をシミュレーションによって求めた具体例を説明する。
【0142】
本実施例の計算機以外の構成は、実施例1と同じであり、被検体も実施例1と同じものを用いた。
【0143】
本実施例の計算機によるモアレの解析方法について説明をする。
本実施例では、基準となるモアレI5と、基準となるモアレI5に対して位相が0.5πずれたモアレI6を用いて被検体の微分位相像を求めた。検出器の画素を単位とするモアレの周期P=4、α=1を式(13)に代入して、下記式(19)が得られる。
【0144】
【数19】
【0145】
式(19)で表されるモアレを、式(5)を用いて解析することで、微分位相像が得られる。図10は本実施例により得られた被検体の微分位相像およびラインプロファイルである。図10と図21を比較すると、比較例2よりも本実施例の方が比較例3と近い結果が得られているため、本比較例の方が比較例2よりも正確に近い微分位相像を得られていると考えられる。
【0146】
(実施例4)
実施例4では、実施形態2に示した解析方法を行う波面測定装置を用いて、2次元モアレを用いてx方向の微分位相像とy方向の微分位相像をシミュレーションによって求めた具体例を説明する。
【0147】
本実施例の波面測定装置は、計算機以外の構成は実施例2と同じであるとし、被検体も実施例2と同じものを用いた。
【0148】
本実施例の計算機によるモアレの解析方法について説明をする。
【0149】
本実施例では、基準となるモアレと、基準となるモアレに対してx方向に位相が0.25πずれたモアレから式(13)と式(5)を用いてx方向の微分位相像を取得した。同様に、基準となるモアレと、基準となるモアレに対してy方向に位相が0.25πずれたモアレから式(13)と式(5)を用いてy方向の微分位相像を取得した。尚、P=4、α=1とした。
つまり、本実施例では、合わせて3つのモアレから被検体のx方向とy方向の微分位相像を求めた。
【0150】
図11(a)は本実施例により得られたx方向の微分位相像であり、図11(b)は本実施例により得られたy方向の微分位相像である。また、実施例4と、比較例3、4により得られた被検体のx方向の微分位相像を用いてラインプロファイルを作成した。図12(a)が被検体の左端のラインプロファイル、図12(b)が被検体の右端のラインプロファイルである。3つの線はそれぞれ、実線が実施例4で得られた微分位相像、破線が比較例3で得られた微分位相像、一点鎖線が比較例4で得られた微分位相像、のラインプロファイルである。図12を見ると、実施例4の方が比較例4よりも比較例3と近い結果が得られているため、実施例4の方が比較例4よりも正確に近い微分位相像を得られていると考えられる。
【0151】
以上、本発明を、微分干渉法を行う干渉計に適用した場合について説明したが、本発明は微分干渉法を行う干渉計にのみ適用できるものではなく、(微分でない)干渉法を行う干渉計や、干渉を用いない波面測定装置に適用することもできる。
【0152】
(実施例5)
実施例5では、干渉を用いない波面測定装置の例として、特表2010−502977号公報に記載されている波面測定装置に本発明を適用した場合について図13を用いて簡単に説明をする。
【0153】
図13の波面測定装置1000は被検体にX線を照射し、被検体によるX線の屈折量を検出、解析することで波面の情報を算出し、被検体の位相に関する情報を得る波面測定装置である。
【0154】
図13に示した波面測定装置1000は、X線源1101と、X線源1101から出射した発散X線1102を分割してX線ビーム1105を形成する分割素子1103、X線ビームを検出する検出器1106を備える。更に、検出器1106による周期パターンの検出結果に基づいて計算を行う演算部として計算機1107と、分割素子103の移動部としてアクチュエーター1108も備えている。また、被検体1104は図13に示したように分割素子1103と検出器1106の間に置かれていても良いし、X線源1101と分割素子1103の間に置かれても良い。
【0155】
この波面測定装置では、分割素子1103によってX線が分割されることで検出器上にX線の強度差がついた周期パターンが形成される。また、アクチュエーター1108によって分割素子1103が移動することで周期パターンの位相がシフトする。そのため、検出器1106により第1の光周期パターンを検出した後、アクチュエーター1108によって分割素子を移動させて再度検出を行うことで第2の光周期パターンを取得することができる。第1の光周期パターンと第2の光周期パターンを用いて波面情報を算出する方法は、上述のシアリング干渉計を用いて取得した第1の光周期パターンと第2の光周期パターンを用いて波面情報を算出する方法と同じであるため説明を省略する。
【0156】
(実施例6)
実施例6では、被検体をあらゆる方向から撮像して得られた投影像から断層像を求めるX線コンピュータ断層撮影装置(X線CT装置)の例を説明する。尚、本実施例のX線CT装置も波面測定装置である。本実施例では、実施形態1の波面測定装置が行う波面測定方法を用いて求めた微分位相像を投影位相像として用い、断層位相像を求めた。
【0157】
本実施例の波面測定装置101を図15に示した。波面測定装置101は、光源として平行X線(平行光)を出射するX線源1110を備え、線源格子を備えていない。また、被検体を乗せる台1210および台を回転するためのアクチュエーター1220を備えており、更に検出器160の検出結果に基づいて計算を行う計算機1170により断層像の情報を算出する点が図1に記載の波面測定装置1と異なる。
【0158】
しかし、位相格子140により干渉パターンを形成することと、干渉パターンが形成される位置に遮蔽格子150を配置してモアレを形成すること、そのモアレを検出器160により検出することは図1に記載の波面測定装置1と同様である。
【0159】
尚、波面測定装置101では、台1210および台を回転するためのアクチュエーター1220により被検体を回転させる構成になっているが、被検体を回転させる代わりに波面測定装置101を回転させてもよい。複数の投影角度で被検体による位相の変調を受けた波面を撮像することで、複数の投影像を取得でき、その複数の投影像から被検体の断層像を求めることができる。
【0160】
本実施例で用いた被検体1130を図16((a)〜(d))に示した。図16(a)は被検体をyz平面で切った断面図であり、図16(b)は被検体をxz平面で切った断面図であり、図16(c)は被検体をxy平面で切った断面図であり、図16(d)は被検体の俯瞰図である。本実施例では、被検体を1.40625度刻みで180度回転させて、128方向から被検体を撮像した。各投影角度において、基準となるモアレと基準となるモアレに対してX方向(被検体の回転軸および投影方向と垂直な方向とする)に位相がπずれたモアレを検出した。各投影角度におけるモアレの検出の考え方を図17(a)に示した。横軸は投影角度、縦軸は基準となるモアレに対するX方向への位相差を示しており、図中の黒丸(●)で表わした投影角度、位相差の位置でモアレを検出し、白丸(〇)で表した投影角度、位相差の位置ではモアレを検出しない。ただし、モアレ検出時の投影角度、相対位相差の位置はこれに限定されるものでなく、例えば図17(c)に示したようにモアレの検出を行っても良い。つまり、本実施例のように微分位相像から断層位相像を求める場合、各投影角度で被検体の微分位相像が得られれば良いため、全ての投影角度で検出するモアレの位相差が同じである必要はない。
【0161】
検出したモアレより、実施例1で投影微分位相像を求めた方法と同様の方法で、各投影角度におけるX方向の投影微分位相像を求めた。すなわち256枚のモアレから128方向の投影微分位相像を求めた。更にこの128方向からの投影微分位相像より、被検体の断層位相像を求めた。投影微分位相像より断層位相像を求める方法について説明をする。
【0162】
本実施例では、微分位相像から断層位相像を求める画像再構成法として、フィルタ補正逆投影(Filtered Back Projection;FBP)法を用いた。FBP法は画像再構成法の一つとして広く知られている手法のため、本実施例ではその概略を説明する。但し、微分位相像から断層位相像を求める方法はFBP法に限らず、種々の画像再構成法を使用することができる。
【0163】
一般に画像再構成法は、物体のあらゆる方向からの投影像より、物体の2次元または3次元的な物理量の分布を求める手法である。すなわち、一般的な画像再構成法は被検体の物理量の3次元的な分布;f(x、y、z)を、その投影;∫f(x、y、z)ds(dsは投影方向に沿う線素)から求める方法である。本実施例では、物体の各断面(各投影方向がつくる平面)での物理量の分布の画像再構成法のみを扱うが、これが本発明の適用範囲を狭めるものではない。
【0164】
投影像から物体の各断面での物理量の分布(断層像と呼ぶことがある);f(x、y)を取得するFBP法を具体的に説明する。図14(a)を用いてx軸とy軸について説明をする。図14(a)に示したように、x軸、y軸は矢印で示した投影方向を含む平面内にとる。z軸はx軸とy軸に垂直に取るが、簡単のため表示していない。ここで、本実施例では実施例5以前と、軸の取り方が異なるので注意されたい。図14(a)に示したように、x−y座標系をθだけ回転した座標系をX−Y座標系とする。図14(a)の空間(実空間)を周波数空間に変換したものを図14(b)に示す。つまり、x−y座標系に対応した空間周波数空間の座標系をμ−ν座標系とする。
【0165】
まず、投影像;p(X、θ)を式(20)で定義する。
【0166】
【数20】
【0167】
次に、f(x、y)の2次元フーリエスペクトルF(μ、ν)を考える。スペクトルF(μ、ν)は式(21)で表わされる
【0168】
【数21】
【0169】
極座標表示;(ρ、θ)を用いて式(21)を変形すると、
【0170】
【数22】
【0171】
が得られる。ただし、F(X)[a]は、aのX方向へのフーリエ変換を表す。また、次の関係を用いた。
【0172】
【数23】
【0173】
式(22)が意味するのは、p(X、θ)をX方向へ1次元フーリエ変換して求められるスペクトルは、F(μ、ν)のθ方向でのスペクトルと等しくなるということであり、投影切断面定理として知られている。
【0174】
よって、F(μ、ν)を2次元逆フーリエ変換することでf(x、y)が求まる。
【0175】
【数24】
【0176】
式(22)を用いて式(24)を変形すると、式(25)が得られる。
【0177】
【数25】
【0178】
すなわち、式(25)より以下のステップにより投影像から断層像が得られることが分かる。
(i)各投影像;p(X、θ)をフーリエ変換する。
(ii)得られたスペクトル;F(X)[p(X、θ)]に周波数フィルタ;|ρ|を掛ける。
(iii)フィルタ処理したスペクトルを逆フーリエ変換し逆投影する。
【0179】
さらに、式(25)から式(26)が得られる。
【0180】
【数26】
【0181】
p(X、θ)をXで微分したものを投影微分像と呼ぶと、式(26)より以下のステップにより投影微分像から断層像が得られることが分かる。
(i)各投影微分像;dp(X、θ)/dXをフーリエ変換する。
(ii)得られたスペクトル;F(X)[dp(X、θ)/dX]に周波数フィルタ;−i|ρ|/ρを掛ける。
(iii)フィルタ処理したスペクトルを逆フーリエ変換し逆投影する。
【0182】
式(25)、式(26)による再構成法のほかに、周波数フィルタの形状が異なるものもFBP法と呼ばれ、一般に知られており、それらの周波数フィルタが式(25)と式(26)と異なるものも本実施例に用いることができる。
【0183】
ここまで、FBP法による断層像の取得方法を説明した。トールボット干渉計で検出できるモアレから得られる投影微分位相像∂p(X,θ、z)/∂Xと、被検体の断層位相像Φ(x、y、z)の関係は、式(20)を用いると、下記式(27)で表される。
【0184】
【数27】
【0185】
よって式(26)を用いることで、投影微分位相像から断層位相像Φ(x、y、z)が求まる。または、各投影微分位相像を各々積分して投影位相像を求めた後、式(25)を用いることでも断層位相像Φ(x、y、z)を求めることができる。図17(b)は本実施例において得られた被検体の断層位相像である。
【0186】
ここまでの説明から明らかなように、周期パターンから各投影像を取得するプロセスと、各投影像から各断層像を取得するプロセスは独立である。したがって、各投影像から各断層像を取得する画像再構成法はFBP法に限らず、種々の画像再構成法を本発明と組み合わせることができる。
【0187】
また前述のように、トールボット干渉計(またはトールボットラウ干渉計)では、被検体の微分位相像の他に吸収像と散乱像を得ることもできる。それぞれを、投影吸収像、投影散乱像と呼び、吸収、散乱に対応する断層像をそれぞれ、断層吸収像、断層散乱像と呼ぶことにする。すると、投影微分位相像から断層位相像を求めた方法と同様に、投影吸収像、投影散乱像から式(25)を用いることで断層吸収像、断層散乱像を求めることができる。
【0188】
(比較例5)
比較例5では、位相シフト法を用いて求めた被検体の投影微分位相像より断層位相像を求めた例を説明する。本比較例でも、被検体を1.40625度刻みで180度回転させ、128方向から被検体を撮像した。ただし、各投影角度において基準となるモアレの他に、基準となるモアレに対してX方向に位相がπ/2、π、3π/2ずれたモアレを検出し、各投影角度において合計4つのモアレを検出した点が実施例6と異なる。各投影角度におけるモアレの検出位置の考え方を図24(a)に示した。検出したモアレを用いて、比較例1で投影微分位相像を求めた方法と同様の方法で、各投影角度におけるX方向の投影微分位相像を求めた。すなわち512枚のモアレから128方向の投影微分位相像を求めた。この128方向からの投影微分位相像から、式(26)に従い被検体の断層位相像を求めた。図24(b)は本比較例において得られた被検体の断層位相像である。
【0189】
(比較例6)
比較例6では、窓フーリエ変換法を用いて求めた被検体の投影微分位相像より断層位相像を求めた例を説明する。本比較例でも、被検体を1.40625度刻みで180度回転させ、128方向から被検体を撮像した。ただし、各投影角度において検出するモアレは一枚である。モアレの撮像位置の考え方を図24(c)に示した。検出したモアレを用いて、比較例2で投影微分位相像を求めた方法と同様の方法で各投影角度におけるX方向の投影微分位相像を求めた。すなわち128枚のモアレから128方向の投影微分位相像を求めた。この128方向からの投影微分位相像から、式(26)に従い被検体の断層位相像を求めた。図24(d)は本比較例により得られた被検体の断層位相像である。
【0190】
実施例6、比較例5、および比較例6で求めたそれぞれの断層位相像の空間分解能を比較するため、図17(b)、図24(b)、図24(d)の点線で示した部分のラインプロファイルを図18に示した。点線が実施例6で得られた断層位相像、破線が比較例5で得られた断層位相像、一点鎖線が比較例6で得られた断層位相像、実線が被検体の真の断層位相像のラインプロファイルである。ラインプロファイルより、比較例6、実施例6、比較例5の順に真の断層位相像に近い断層位相像が得られており、この順で空間分解能が高いことが分かる。
【0191】
(実施例7)
実施例7では、実施例6とは異なる方法でモアレを検出し、そのモアレから実施形態1に示した解析手法を用いて投影微分位相像を求め、さらにその投影微分位相像から断層位相像を求めた具体例を説明する。ただし、投影微分位相像から断層位相像を求める方法は実施例6と同様である。本実施例におけるモアレの検出方法は、実施例6で説明したモアレの検出方法が抱える課題を解決している。実施例6の方法では、各投影角度で複数のモアレを検出するため、各投影角度で被検体の回転を停止させなければならないという課題がある。本実施例では、各投影角度において検出するモアレを一つにすることで、被検体の一連の撮像中に被検体の回転を停止させる必要をなくした。つまり、本実施例のようにモアレを検出すれば、被検体を連続的に回転させながら断層像を求めるための撮像を行うことができる。本実施例の、各投影角度におけるモアレの検出位置を図19(a)に示した。ここでは、投影微分位相像の2種類の求め方を説明する。
【0192】
投影微分位相像の1番目の求め方を説明する。図19(a)の見方は図17(a)と同様であり、図中の黒丸(●)で表わした投影角度、位相差の位置でモアレを検出し、白丸(〇)で表した投影角度、位相差の位置ではモアレを検出しないことを示す。図19(a)が示すように、まず、第1の投影角度θiで基準となる第1のモアレを取得する。次に、第2の投影角度θi+1で第2のモアレを取得する。第2のモアレは、基準となるモアレに対して、被検体の回転軸および投影方向と垂直方向に位相がπずれている。これら2つのモアレから実施形態1に示した解析手法を用いて、投影角度θiにおける投影微分位相像を取得する。つまり、第1のモアレから仮想モアレである第3のモアレを、第2のモアレから仮想モアレである第4のモアレを夫々得て、合計4枚のモアレを用いて第1の投影角度θiにおける投影位相像を得る。同様に、第3の投影角度θi+2および第4の投影角度θi+3で検出したモアレより、第3の投影角度θi+2における投影微分位相像を取得できる。第2と第4の投影角度θi+1とθi+3における投影微分位相像は取得しない。すなわち求める投影微分位相像の数は、検出したモアレの数の半分である。尚、第1と第2の投影角度θi、θi+1で検出したモアレから、第2の投影角度θi+1における投影微分位相像を求め、第3と第4の投影角度θi+2、θi+3で検出したモアレより、第4の投影角度θi+3における投影微分位相像を取得しても良い。また、図19(a)では第1の投影角度θiと第3の投影角度θi+2において検出するモアレの位相差が0であるように表わされているが、位相差は0である必要はなく、例えば図19(c)に示した投影角度と位相差でモアレを検出しても良い。
【0193】
次に、投影微分位相像の2番目の求め方を説明する。2番目の求め方では、第2の投影角度θi+1および第4の投影角度θi+3における投影微分位相像も求める。モアレを検出する投影角度と位相差は図19(a)と同じである。また、第1の投影角度θiおよび第3の投影角度θi+2における投影微分位相を求める方法も1番目の方法と同じである。ただし、2番目の方法では、第2の投影角度θi+1および第3の投影角度θi+2で検出したモアレを用いて第2の投影角度θi+1の投影微分位相像を求める。同様に、第4の投影角度θi+3および第5の投影角度θi+4で検出したモアレを用いて第4の投影角度θi+3の投影微分位相像を求める。投影微分位相像の求め方は1番目の方法で第1の投影角度θiおよび第3の投影角度θi+2の投影微分位相像を求めた方法と同じである。尚、2番目の方法では、第2の投影角度θi+1における投影微分位相像を求めるため、第2の投影角度θi+1で検出するモアレは第3の投影角度θi+2で検出するモアレに対して、位相がπずれるようにすることが好ましい。この2番目の方法では、求められる投影微分位相像の数は、検出したモアレの数と同じである。
【0194】
ここで説明した2種類の投影微分位相像を求める方法は、異なる投影角度で検出したモアレを、同じ投影角度で検出したモアレかのように扱う方法である。そのため、実施例6で説明した方法に比べて、像の歪みやぼけが生じる可能性があるが、上述のように一連の撮像中に装置の回転を停止する必要がないというメリットがある。
【0195】
上述1番目の方法で求めた投影微分位相像より断層位相像を求めるシミュレーションを行う。本シミュレーションに用いた波面測定装置と被検体は実施例6のものであるとし、被検体を1.40625度刻みで180度回転させて128方向から撮像した点も実施例6と同様である。ただし、各投影角度で検出するモアレは一つであり、各投影角度で検出するモアレの位相差は本実施例内で説明したとおり図19(a)で示したようにする。128方向から撮像したモアレより得られる64方向の投影微分位相像より、式(26)に従い求めた断層位相像を図19(b)に示した。
【0196】
(比較例7)
比較例7では、比較例5とは異なる方法で取得したモアレから位相シフト法を用いて求めた投影微分位相像より断層位相像を取得した例を説明する。ここでも、2種類の求め方を説明する。
【0197】
まず、投影微分位相像の1番目の求め方を説明する。この方法は、I.Zanette,et al.,Applied Physics Letters 98,094101(2011)に記載の方法である。各投影角度におけるモアレの検出位置を図25(a)に示した。図25(a)は図17(a)と同様に、図中の黒丸(●)で表わした投影角度、位相差の位置でモアレを検出し、白丸(〇)で表した投影角度、位相差の位置ではモアレを検出しないことを示す。まず、第1の投影角度θiで基準となるモアレを取得する。次に、第2の投影角度θi+1で第2のモアレを取得する。第2のモアレは、基準となるモアレに対して、被検体の回転軸と垂直方向に位相がπ/2ずれている。次に、第3の投影角度θi+2で第3のモアレを取得する。第3のモアレは、基準となるモアレに対して、被検体の回転軸と垂直方向に位相がπずれている。さらに、第4の投影角度θi+3で第4のモアレを取得する。第4のモアレは、基準となるモアレに対して、被検体の回転軸と垂直方向に位相が3π/2ずれている。こうして検出した4つのモアレから比較例1に示した解析手法を用いて、投影角度θiにおける投影微分位相像を取得する。同様にして、第5の投影角度θi+4における投影微分位相像を求める。図25(a)では第1の投影角度θiと第5の投影角度θi+4の位相差が0であるように表わされているが、位相差は0である必要はない。また、この方法では、第2、第3、第4の投影角度θi+1、θi+2、θi+3における投影微分位相像は求めない。すなわち求める投影微分位相像の数は、検出したモアレの数の1/4である。
【0198】
次に、投影微分位相像の2番目の求め方を説明する。2番目の求め方では、第2、第3、第4の投影角度θi+1、θi+2、θi+3における投影微分位相像も取得する。モアレを検出する投影角度と位相差は図25(a)と同じである。また、第1の投影角度θiにおける投影微分位相を求める方法も1番目の方法と同じである。ただし、2番目の方法では、投影角度θi+1、θi+2、θi+3、θi+4で検出したモアレを用いて第2の投影角度θi+1の投影微分位相像を求める。同様に、投影角度θi+2、θi+3の投影微分位相像も求める。そのため、第5の投影角度θi+4で取得するモアレは第4の投影角度θi+3で取得するモアレに対して、位相がπ/2ずれるようにすることが好ましい。この2番目の方法では、求める投影微分位相像の数は、検出したモアレの数と同じである。
【0199】
上述の1番目の方法で取得した投影微分位相像より断層位相像を求めるシミュレーションを行う。本シミュレーションに用いた波面測定装置、用いた被検体は実施例6と同様のものであるとし、被検体を1.40625度刻みで180度回転させて128方向から撮像した点も実施例6と同様である。ただし、各投影角度で検出するモアレは1つであり、各投影角度で取得するモアレの位相差は本比較例内で説明したとおりになっている。128方向から撮像したモアレより得られる32方向の投影微分位相像より、式(26)に従い求めた断層位相像を図25(b)に示した。
【0200】
実施例7および比較例7は、異なる投影角度で取得したモアレを同じ投影角度で取得したモアレとして扱い、投影微分位相像を取得している点が実施例6、比較例5および比較例6と異なる。このため、特に投影角度の刻みが粗い場合、被検体の回転中心から離れた点で、像が歪んだりぼけたりする可能性がある。実施例7と比較例7を比較すると、実施例7はこの影響を小さくする効果がある。比較例7では4つの投影角度で検出したモアレを用いて1つの投影角度における投影微分位相像を求めているのに対して、実施例7では2つの投影角度で検出したモアレより1つの投影角度における投影微分位相像を求めている。そのため、像が歪んだりぼけたりする場合でも、その影響を小さくすることができる。以上、断層像を求める際にも実施形態1による波面測定方法が適用できることを説明した。尚、実施例6と7では実施形態1に示した位相シフト法に基づいた方法により投影微分位相像を求めた例について説明をしたが、実施形態2に示した窓フーリエ変換法に基づいた方法により投影微分位相像を求め、その投影微分位相像から断層位相像を求めても良い。
【0201】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
【符号の説明】
【0202】
110 X線源
120 線源格子
130 被検体
140 回折格子
150 遮蔽格子
160 検出器
170 計算機
【特許請求の範囲】
【請求項1】
光源からの光で光周期パターンを形成する光学素子と、前記光学素子からの光を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得する波面測定装置であって、
前記検出器は、前記光学素子からの光で形成された第1の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンと、を検出し、
前記算出手段は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出する
ことを特徴とする波面測定装置。
【請求項2】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
が、夫々異なる光周期パターン検出時に前記第1の画素又は前記第2の画素が検出した検出結果であるとみなして前記波面情報を算出するように構成されていることを特徴とする請求項1に記載の波面測定装置。
【請求項3】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
が、夫々異なる光周期パターン検出時に前記第1の画素が検出した検出結果であるとみなして前記波面情報を算出するように構成されていることを特徴とする請求項2に記載の波面測定装置。
【請求項4】
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第2の画素が検出した検出結果と、を用いて前記波面情報を算出するように構成されていることを特徴とする請求項2に記載の波面測定装置。
【請求項5】
前記第1の画素と前記第2の画素とが隣接していることを特徴とする請求項1乃至4のいずれか1項に記載の波面測定装置。
【請求項6】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を有する強度分布を
フーリエ変換することで、
前記波面情報を算出するように構成されていることを特徴とする請求項1に記載の波面測定装置。
【請求項7】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて合成周期パターンを合成し、
前記合成周期パターン内で、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
が3画素以内に配置されていることを特徴とする請求項6に記載の波面測定装置。
【請求項8】
光源からの光で2次元の光周期パターンを形成する光学素子と、前記光学素子からの光を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得する波面測定装置であって、
前記検出器は、前記光学素子からの光で形成された第1の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンおよび該第2の光周期パターンに対して位相がシフトした第3の光周期パターンを検出し、
前記第1の光周期パターンに対する第2の光周期パターンの位相のシフト方向と、
前記第1の光周期パターンに対する第3の光周期パターンの位相のシフト方向と、が交わり、
前記算出手段は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時または前記第2の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出し、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第3の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時または前記第3の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第3の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出することを特徴とする波面測定装置。
【請求項9】
前記波面情報とは、
前記被検体を透過した光の波面の、位相、微分位相、振幅、散乱の少なくともいずれか1つの情報であることを特徴とする請求項1乃至8のいずれか1項に記載の波面測定装置。
【請求項10】
前記算出手段は、
算出した前記1つの位置における前記波面情報をマッピングすることで
前記被検体の、吸収像、散乱像、位相像、又は微分位相像を形成することを特徴とする請求項1乃至9のいずれか1項に記載の波面測定装置。
【請求項11】
前記光周期パターンは干渉パターンまたはモアレであることを特徴とする請求項1乃至10のいずれか1項に記載の波面測定装置。
【請求項12】
前記光はX線であることを特徴とする請求項1乃至11のいずれか1項に記載の波面測定装置。
【請求項13】
X線源からのX線で光周期パターンを形成する光学素子と、前記光学素子からのX線を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過したX線の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得するX線撮像装置であって、
前記検出器は、前記光学素子からのX線で形成された第1のX線周期パターンと、前記光学素子からのX線で形成され該第1の光周期パターンに対して位相がシフトした第2のX線周期パターンと、を検出し、
前記算出手段は、
前記第1のX線周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1のX線周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2のX線周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出することを特徴とするX線撮像装置。
【請求項14】
前記X線撮像装置はコンピュータ断層撮影を行うX線撮像装置であり、
前記算出手段は、
前記複数の位置のうち1つの位置における前記波面情報を算出することを複数回行うことで投影像の情報を算出し、
前記投影像の情報の算出を複数回行うことで複数の投影像の情報を取得し、
前記複数の投影像の情報を用いて被検体の断層像の情報を取得することを特徴とする請求項13に記載の波面測定装置。
【請求項15】
X線源からのX線で周期パターンを形成する光学素子と、前記光学素子からのX線を検出する検出器と、前記検出器の検出結果に基づいて被検体の断層像の情報を算出する算出手段と、を備えるX線コンピュータ断層撮影装置であって、
前記算出手段は、
前記被検体の複数の投影像の情報から前記断層像の情報を算出し、
前記複数の投影像の情報の夫々は、
第1の投影角度において検出した周期パターンと、
前記第1の投影角度において検出した周期パターンから算出した仮想的な周期パターンと、
前記第1の投影角度と異なる第2の投影角度において検出した周期パターンと、を用いることで算出されることを特徴とするX線コンピュータ断層撮影装置。
【請求項16】
波面測定装置に用いる波面測定方法であって、
光学素子により、光源からの光で光周期パターンを形成する工程と、
前記光学素子からの光を検出する複数の画素を有する検出器により、前記光学素子からの光で形成された第1の光周期パターンを検出する工程と、
前記検出器により、前記前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンを検出する工程と、
前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する工程と、を有し、
前記波面情報を算出する工程は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出する
ことを特徴とする波面測定方法。
【請求項17】
波面測定装置に用いられるプログラムであって、
光学素子により、光源からの光で光周期パターンを形成する工程と、
前記光学素子からの光を検出する複数の画素を有する検出器により、前記光学素子からの光で形成された第1の光周期パターンを検出する工程と、
前記検出器により、前記前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンを検出する工程と、
前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する工程と、実行させ、
前記波面情報を算出する工程は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出する
ことを特徴とするプログラム。
【請求項1】
光源からの光で光周期パターンを形成する光学素子と、前記光学素子からの光を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得する波面測定装置であって、
前記検出器は、前記光学素子からの光で形成された第1の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンと、を検出し、
前記算出手段は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出する
ことを特徴とする波面測定装置。
【請求項2】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
が、夫々異なる光周期パターン検出時に前記第1の画素又は前記第2の画素が検出した検出結果であるとみなして前記波面情報を算出するように構成されていることを特徴とする請求項1に記載の波面測定装置。
【請求項3】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
が、夫々異なる光周期パターン検出時に前記第1の画素が検出した検出結果であるとみなして前記波面情報を算出するように構成されていることを特徴とする請求項2に記載の波面測定装置。
【請求項4】
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第2の画素が検出した検出結果と、を用いて前記波面情報を算出するように構成されていることを特徴とする請求項2に記載の波面測定装置。
【請求項5】
前記第1の画素と前記第2の画素とが隣接していることを特徴とする請求項1乃至4のいずれか1項に記載の波面測定装置。
【請求項6】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を有する強度分布を
フーリエ変換することで、
前記波面情報を算出するように構成されていることを特徴とする請求項1に記載の波面測定装置。
【請求項7】
前記算出手段は、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて合成周期パターンを合成し、
前記合成周期パターン内で、
前記第1の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
が3画素以内に配置されていることを特徴とする請求項6に記載の波面測定装置。
【請求項8】
光源からの光で2次元の光周期パターンを形成する光学素子と、前記光学素子からの光を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得する波面測定装置であって、
前記検出器は、前記光学素子からの光で形成された第1の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンと、前記光学素子からの光で形成され該第1の光周期パターンおよび該第2の光周期パターンに対して位相がシフトした第3の光周期パターンを検出し、
前記第1の光周期パターンに対する第2の光周期パターンの位相のシフト方向と、
前記第1の光周期パターンに対する第3の光周期パターンの位相のシフト方向と、が交わり、
前記算出手段は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時または前記第2の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出し、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第3の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時または前記第3の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第3の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出することを特徴とする波面測定装置。
【請求項9】
前記波面情報とは、
前記被検体を透過した光の波面の、位相、微分位相、振幅、散乱の少なくともいずれか1つの情報であることを特徴とする請求項1乃至8のいずれか1項に記載の波面測定装置。
【請求項10】
前記算出手段は、
算出した前記1つの位置における前記波面情報をマッピングすることで
前記被検体の、吸収像、散乱像、位相像、又は微分位相像を形成することを特徴とする請求項1乃至9のいずれか1項に記載の波面測定装置。
【請求項11】
前記光周期パターンは干渉パターンまたはモアレであることを特徴とする請求項1乃至10のいずれか1項に記載の波面測定装置。
【請求項12】
前記光はX線であることを特徴とする請求項1乃至11のいずれか1項に記載の波面測定装置。
【請求項13】
X線源からのX線で光周期パターンを形成する光学素子と、前記光学素子からのX線を検出する複数の画素を有する検出器と、前記検出器の検出結果に基づいて被検体を透過したX線の波面の複数の位置における波面情報を算出する算出手段と、を備え、前記被検体の情報を取得するX線撮像装置であって、
前記検出器は、前記光学素子からのX線で形成された第1のX線周期パターンと、前記光学素子からのX線で形成され該第1の光周期パターンに対して位相がシフトした第2のX線周期パターンと、を検出し、
前記算出手段は、
前記第1のX線周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1のX線周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2のX線周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出することを特徴とするX線撮像装置。
【請求項14】
前記X線撮像装置はコンピュータ断層撮影を行うX線撮像装置であり、
前記算出手段は、
前記複数の位置のうち1つの位置における前記波面情報を算出することを複数回行うことで投影像の情報を算出し、
前記投影像の情報の算出を複数回行うことで複数の投影像の情報を取得し、
前記複数の投影像の情報を用いて被検体の断層像の情報を取得することを特徴とする請求項13に記載の波面測定装置。
【請求項15】
X線源からのX線で周期パターンを形成する光学素子と、前記光学素子からのX線を検出する検出器と、前記検出器の検出結果に基づいて被検体の断層像の情報を算出する算出手段と、を備えるX線コンピュータ断層撮影装置であって、
前記算出手段は、
前記被検体の複数の投影像の情報から前記断層像の情報を算出し、
前記複数の投影像の情報の夫々は、
第1の投影角度において検出した周期パターンと、
前記第1の投影角度において検出した周期パターンから算出した仮想的な周期パターンと、
前記第1の投影角度と異なる第2の投影角度において検出した周期パターンと、を用いることで算出されることを特徴とするX線コンピュータ断層撮影装置。
【請求項16】
波面測定装置に用いる波面測定方法であって、
光学素子により、光源からの光で光周期パターンを形成する工程と、
前記光学素子からの光を検出する複数の画素を有する検出器により、前記光学素子からの光で形成された第1の光周期パターンを検出する工程と、
前記検出器により、前記前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンを検出する工程と、
前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する工程と、を有し、
前記波面情報を算出する工程は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出する
ことを特徴とする波面測定方法。
【請求項17】
波面測定装置に用いられるプログラムであって、
光学素子により、光源からの光で光周期パターンを形成する工程と、
前記光学素子からの光を検出する複数の画素を有する検出器により、前記光学素子からの光で形成された第1の光周期パターンを検出する工程と、
前記検出器により、前記前記光学素子からの光で形成され該第1の光周期パターンに対して位相がシフトした第2の光周期パターンを検出する工程と、
前記検出器の検出結果に基づいて被検体を透過した光の波面の複数の位置における波面情報を算出する工程と、実行させ、
前記波面情報を算出する工程は、
前記第1の光周期パターンの検出時に前記複数の画素のうちの第1の画素が検出した検出結果と、
前記第1の光周期パターンの検出時に前記複数の画素のうちの前記第1の画素から3画素以内に配置されている第2の画素が検出した検出結果と、
前記第2の光周期パターンの検出時に前記第1の画素が検出した検出結果と、
を用いて、前記複数の位置のうち1つの位置における前記波面情報を算出する
ことを特徴とするプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図9】
【図12】
【図13】
【図14】
【図15】
【図18】
【図7】
【図8】
【図10】

【図11】
【図16】
【図17】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図9】
【図12】
【図13】
【図14】
【図15】
【図18】
【図7】
【図8】
【図10】
【図11】
【図16】
【図17】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2013−50441(P2013−50441A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−137921(P2012−137921)
【出願日】平成24年6月19日(2012.6.19)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年6月19日(2012.6.19)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]