
洋上荷役システム及びこれを備えた洋上浮遊体
【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶や洋上浮体構造物に設置されるウィンチやクレーン等の荷役機構において、波やうねりなどの影響を受けることなく、水中の吊荷を安定して保持することが可能な荷役システム及びこれを備えた洋上浮遊体に関するものである。
【背景技術】
【0002】
船舶や洋上浮体構造物に設置されるウィンチやクレーン等の荷役機構を用いて、水中の吊荷を安定して保持するための装置として、特許文献1に示すものが提案されている。
【0003】
このものは、フローティングクレーンのブームより垂下させたワイヤロープに物品を吊り下げて作業を行うときに、フローティングクレーンが上下に揺動することによってブームに作用する上下方向の加速度を検知し、この加速度からブームの上下方向の変位量を求め、前記変位量を相殺するように油圧モータを制御することによってワイヤロープを巻き出しあるいは巻き取ることによりフローティングクレーンの上下揺動による物品変位すなわち物品の揺動を抑制するようにしたものである。かかる物品を水中の吊荷に置き換えれば、洋上で当該吊荷を安定に保持することが期待できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平4−191296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、洋上で用いる荷役システムであっても、単に水上から水中にかけての荷の昇降だけを目的とするものにとどまらず、ある一定の水中高度で荷を安定的に保持したり、海底に着底させた状態で安定的に保持したりするような方法で使用する場合もある。例えば、水中の調査用機器を架台に載せた状態で水中に降ろし、一定の高さを維持しつつ使用する場合や、架台が海底に着底した状態を維持しつつ海底上への荷下ろし作業を行う場合が考えられる。そのため、一定の水中高度で維持しようとするときは、機器の測定不良や故障が生じないよう架台の上下動を抑えつつ傾きも抑制することが必要となり、不意の海底への接触などによる衝撃が生じないようにすることが必要となる。また、海底に着底させた状態を維持しようとするときは、ワイヤロープが機器に干渉しないように、すなわち必要以上に弛まないように引き出し量を制御することが必要となる。
【0006】
以上のような使用方法を想定し、荷役機構を用いて水中に吊り下げる吊荷を複数のワイヤロープで支持する構成を考えた場合、上述の技術のみでは不十分な点がある。
【0007】
具体的には、上述の技術では複数のワイヤロープを用いて吊荷を保持する場合が想定されておらず、水中で吊荷の姿勢を制御する技術について何ら開示されていないことが挙げられる。例えば、複数のワイヤロープで物品を載せる架台を懸架して協働して上下動させるような場合、個々のワイヤロープに関して独立して上記の制御を行うのみでは架台の傾きを防止することができないとともに、相互に影響し合うことで上下動が却って悪化することも考えられる。
【0008】
また、上述の技術では、洋上のクレーンのブームにのみ着目して制御を行っているため、実際の水中の吊荷の状態を正確に制御に反映することができていない。具体的には、ブームに働く加速度のみを頼りに制御を行おうとした場合、吊荷の高さ方向位置について誤差が累積し、正確に目的の高さ位置に吊荷を保持することが不能となり、最悪の場合には海底に衝突する危険も生じる。
【0009】
また、吊荷が海底に着底した状態を保持することが必要な場合には、上記の技術を用いれば吊荷の状態と無関係にワイヤの巻き出しや巻き取りを行うため、誤差の累積によってはワイヤロープが弛みすぎて吊荷に絡まったり、吊荷が海底から浮き上がったりするような問題が生じる可能性がある。
【0010】
本発明は、このような課題を有効に解決することを目的としており、具体的には、一定の水中高度を維持しようとする際には吊荷の上下動や揺動および定常的な傾きを抑制しつつ海底への衝突を生じさせないこと、さらには海底に着底させ、それを維持させる際には必要以上にワイヤロープを弛ませず浮き上がりも生じさせないことが可能な洋上荷役システム及びこれを備えた洋上浮遊体を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、かかる目的を達成するために、次のような手段を講じたものである。
【0012】
すなわち、本発明の洋上荷役システムは、同一の洋上浮遊体に取付けられる複数のウィンチ等の荷役機構と、それら荷役機構よりそれぞれ引き出され吊荷を協働して懸架するワイヤロープと、それらワイヤロープの引き出し量を変化させ吊荷を下降または上昇させるように前記複数の荷役機構を制御する制御手段とを具備するものであって、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる揺動検出部と、前記吊荷の揺動を抑制するための各ワイヤロープの引き出し量補正値を前記揺動検出部からの検出値に基づいて出力する揺動補正指令部とを備え、当該揺動補正指令部からの出力値をフィードバックして前記荷役機構の制御を行うことを特徴とする。
【0013】
このように構成すると、船側の揺動の影響を打ち消し水中の吊荷の揺動を抑制することが可能となる。また、複数のワイヤロープの引き出し量を連動して制御することで、吊荷の重心位置に影響を与えることなく揺動のみを抑え、初期の傾きを保持することが可能となる。
【0014】
さらに、吊荷の上下動をも抑制し、水中高度を一定に維持するためには、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる上下動検出部と、前記吊荷の上下動を抑制するための各ワイヤロープの引き出し量補正値を前記上下動検出部からの検出値に基づいて出力する上下動補正指令部とをさらに備え、当該上下動補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【0015】
また、洋上浮遊体の定常的な傾きによる影響を排除して、吊荷を水平または任意の傾きに修正するためには、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる傾斜角検出部と、前記吊荷の定常的な傾斜を所定値に修正するための各ワイヤロープの引き出し量補正値を前記傾斜角検出部からの検出値に基づいて出力する傾斜補正指令部とをさらに備え、当該傾斜補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【0016】
また、ワイヤロープを必要以上に弛ませず吊荷の着底状態を安定して実現するためには、前記制御手段が、前記荷役機構のそれぞれに設けられるワイヤロープの張力検出部と、張力を制御するための各ワイヤロープの引き出し量補正値を前記張力検出部からの検出値に基づいて出力する張力補正指令部とをさらに備え、当該張力補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【0017】
また、より正確に吊荷の上下動を抑えつつ海底との衝突を防止するためには、前記制御手段が、前記吊荷に設けられる海底との距離を測る水中高度検出部と、前記吊荷の水中高度を制御するための各ワイヤロープの引き出し量補正値を前記水中高度検出部からの検出値に基づいて出力する高度補正指令部とをさらに備え、当該高度補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【発明の効果】
【0018】
以上説明した本発明によれば、複数のワイヤロープを用いて吊荷作業を行う場合において、揺動検出値に基づいて各ワイヤロープの引き出し量を連動させるように補正することで吊荷の位置・姿勢・動作を制御することができ、上下動、傾斜角、張力または水中高度の各検出値に基づいた制御を加えることでさらに詳細に制御することが可能となる。
【0019】
そのため、吊荷の水中高度を一定に維持しようとする際には、吊荷の定常的な傾斜を任意の値に補正しながら揺動や上下動を抑制することができるとともに予期せぬ海底への衝突を防止することができ、吊荷を海底に着底させる際には、必要以上にワイヤロープを弛ませることなく着底状態を安定的に保持することができる洋上荷役システム及びこれを備えた洋上浮遊体を提供することが可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態に係る洋上荷役システムの模式的な構成図。
【図2】本発明の第2実施形態に係る洋上荷役システムの模式的な構成図。
【図3】本発明の第3実施形態に係る洋上荷役システムの模式的な構成図。
【図4】本発明の第4実施形態に係る洋上荷役システムの模式的な構成図。
【図5】本発明の第5実施形態に係る洋上荷役システムの模式的な構成図。
【発明を実施するための形態】
【0021】
以下、本発明の幾つかの実施形態を、図面を参照して説明する。
<第1実施形態>
【0022】
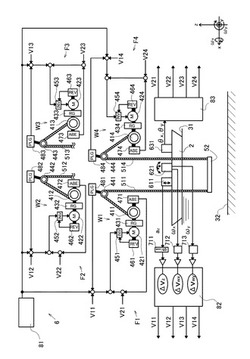
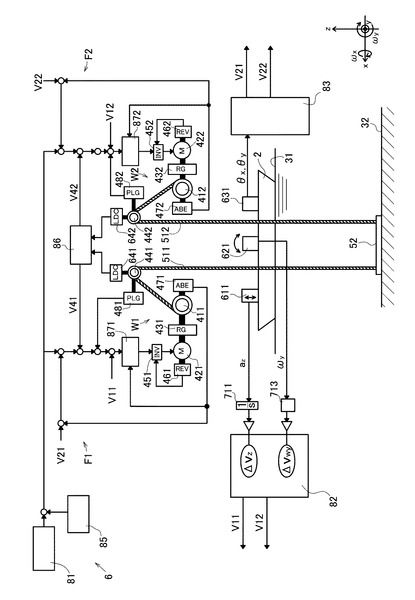
図1は、本発明の第1実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。この荷役システムは洋上浮遊体である船舶2に備え付けられた荷役機構としてのウィンチW1〜W4と、各ウィンチW1〜W4から引き出されるワイヤロープ511〜514と、各ウィンチW1〜W4を制御してワイヤロープ511〜514の引き出し量を変化させる制御手段6とを備える。ワイヤロープ511〜514はそれぞれ水中に垂下し、単一の吊荷52を協働して懸架している。
【0023】
本実施形態における吊荷52は、その上に図示しない荷物を積載することが可能なように平板状の架台として構成しており、ウィンチW1〜W4は船舶2の上でそれぞれを十分に離して設置し、それらから引き出されるワイヤロープ511〜514は架台である吊荷52のほぼ四隅と連結している。
【0024】
ウィンチW1〜W4は、大きくはワイヤロープ511〜514が巻かれた形態で収納されるウィンチドラム411〜414と、そのウィンチドラム411〜414を駆動させるための機構としてのモータ421〜424および減速機431〜434と、そのモータを駆動させるインバータ451〜454と、ウィンチドラム411〜414から繰り出されるワイヤロープ511〜514をガイドして目的の場所に垂下させるシーブ441〜444とから構成される。
【0025】
そして、これらのウィンチW1〜W4が連動して動作を行うように、制御手段6によって統合して制御を行っている。この制御手段6は主として、各ウィンチW1〜W4に対する基準指令値を決定し出力する揚程指令部81と、その基準指令値を基に各ウィンチW1〜W4を適切に制御するフィードバック回路部F1〜F4とからなる。
【0026】
揚程指令部81においては、図示しない入力部より、吊荷52を降下させる際の目標となる水中高度または水面31からの距離、ワイヤロープ511〜514の引き出し速度などの情報を得て、それらを基に各ウィンチW1〜W4のインバータ451〜454に向けて基準指令値を出力する。
【0027】
そして、フィードバック回路部F1〜F4は、各々次のような基本構成をとる。まずインバータ451〜454は上記の揚程指令部81からの基準指令値に基づきモータ421〜424を制御するが、このときモータ421〜424に取り付けられたレゾルバ461〜464による信号をフィードバックしつつ制御値を補正する。また、ウィンチドラム411〜414にはそれぞれアブソリュートエンコーダ471〜474が取り付けてあり、回転を検知しながらその信号をインバータ451〜454へとフィードバックしている。さらに、シーブ441〜444にはそれぞれパルスジェネレータ481〜484が取り付けられ、そこで検知した回転数も制御にフィードバックして用いている。
【0028】
以上のように基本構成された荷役システムは、揚程指令部81より出力される指令値を基にして、それぞれパルスジェネレータ481〜484で検知するシーブ441〜444の回転数から算出できるワイヤロープ511〜514の引き出し量を監視しながら、それが目標値となるようにモータ421〜424の駆動を制御する。その際、アブソリュートエンコーダ471〜474により検知するウィンチドラム411〜414の回転角から、ワイヤロープ511〜514の巻太りによるウィンチドラム411〜414の径変化分を換算し、その値をフィードバックすることで制御値の補正を行う。なお、アブソリュートエンコーダ471〜474に代えてパルスエンコーダを用いて同様に構成することも可能であるが、停電等からの復帰時を考慮した場合には、絶対位置を検出できるアブソリュートエンコーダ471〜474を用いることが好適である。
【0029】
さらに、本実施形態においては、制御手段6が、洋上浮遊体である船舶2の上に設けた上下動検出部として1軸型の加速度センサ611を備えるとともに、これに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。ここで、本発明において「上下動」とは、重心位置が鉛直上方向または鉛直下方向に移動することをいい、図1の右下に記載した座標軸に従えばz軸方向の移動をいうこととする。そして、上記の加速度センサ611はz軸方向の加速度azを測定が可能なものである。
【0030】
以下、各種検出部の説明をする場合においては、この座標軸に沿って行うこととする。
【0031】
さらに、本実施形態の制御手段6は、船舶2上に設けた揺動検出部としてのジャイロセンサ621を備えるとともに、これに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。ここで、本発明において「揺動」とは、ローリングとよばれる前後軸(図中のx軸)周りの運動と、ピッチングとよばれる横軸(図中のy軸)周りの運動とを指し、各々具体的には船舶2が横に傾く形態の揺れと、船首が上下動する形態の揺れに対応する。
【0032】
上記のジャイロセンサ621としては、x軸周りの角速度ωxとy軸周りの角速度ωyを測定可能な2軸型を用いた。
【0033】
加えて本実施形態の制御手段6は、船舶2の上に設置した傾斜角センサ631を備えるとともに、これに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。この傾斜角センサ631はx軸に対する偏差角θxと、y軸に対する偏差角θyとを検出できるようにしている。
【0034】
上述の加速度センサ611により検出された加速度azは積分器711を通って積分され、ジャイロセンサ621により検出されたx軸周りの角速度ωxとy軸周りの角速度ωyとはそれぞれ増幅器712、713を通って回転半径分の所定のゲインを乗じられることによって、それぞれ船舶2の上下動速度に変換されて上下動・揺動補正指令部82に入力される。そして、上下動・揺動補正指令部82では、入力された船舶2の上下動速度の値を基にして、これらの動作による吊荷52への影響を相殺するように、各ウィンチW1〜W4に対するワイヤロープ引き出し量の補正指令値としての上下動・揺動補正指令値V11〜V14を決定し、出力を行う。そして、これらの上下動・揺動補正指令値V11〜V14を、各ウィンチW1〜W4のモータ421〜424の制御量に対する補正値として加えており、こうして各フィードバック回路部F1〜F4の中に上下動と揺動の検出値に基づくフィードバックループを形成している。
【0035】
傾斜角センサ631により検出された偏差角θx、θyは、傾斜補正指令部83に入力され、吊荷52の傾きが所定の値となるように、各ウィンチW1〜W4に対するワイヤロープ引き出し量の補正指令値としての傾斜補正指令値V21〜V24を決定し、出力を行う。そして、この傾斜補正指令値V21〜V24も各ウィンチW1〜W4のモータ421〜424の制御量に対する補正値として加えており、こうして各フィードバック回路部F1〜F4の中に傾斜角(偏差角)検出値に基づくフィードバックループを形成している。
【0036】
ここで、本実施形態においては、加速度センサ611と、ジャイロセンサ621による検出値を一個の上下動・揺動補正指令部82に入力することで、共通の上下動・揺動補正指令値V11〜V14を出力させ、これを制御に用いることで、吊荷52の上下動と揺動とを同時に抑制することを可能としているが、上下動の抑制と揺動の抑制の2つの機能に分類してそれぞれを別に構成することも可能である。
【0037】
具体的には、加速度センサ611による検出値を入力し、その値を基に吊荷52の上下動を抑制するための上下動補正指令値を決定して出力する上下動補正指令部と、ジャイロセンサ621による検出値を入力し、その値を基に吊荷52の揺動を抑制するための揺動補正指令値を決定して出力する揺動補正指令部とを分けて構成し、それぞれの出力値を個別にモータ421〜424の制御量に加えるようにしても良い。本実施態様における上下動・揺動補正指令部82とは、これら上下動補正指令部と揺動補正指令部を一個に構成したものといえる。
【0038】
ここで、上述した補正指令による具体的な作用を以下に説明する。
【0039】
まず、ジャイロセンサ621による船舶2の角速度検出値を基準とした揺動補正指令は、吊荷52のx軸周りとy軸周りの揺動抑制に用いるものである。波等の影響で船舶2がいわゆるピッチング、ローリングといった揺動を行った場合でも、その影響を打ち消すようにして各ワイヤロープ511〜514の引き出し量を制御することで、懸架された吊荷52が船舶2に合わせて揺動を行うことを抑制することが可能となる。具体的には、船舶2が揺れ紙面左側が上となるような動きが生じた時、左側のウィンチW1、W2はワイヤロープ511、512の引き出し量を増大させるべくモータ411、412の制御量を巻出し側に補正し、右側のウィンチW3、W4はワイヤロープ513、514の引き出し量を減少させるべくモータ413、414の制御量を巻取り側に補正することで、吊荷52は船舶2の揺れに関わらず重心位置に影響を与えないまま初期の傾きを保つことができる。
【0040】
次に、加速度センサ611による船舶2の加速度検出値を基準とした上下動補正指令は、吊荷52の上下動、すなわちz軸方向位置の変動の抑制に用いるものである。波等の影響で船舶2に上下動が生じても、その影響を打ち消すようにして各ワイヤロープ511〜514の引き出し量を制御することで、懸架された吊荷52が船舶2に合わせて上下動を行うことを抑制することが可能となる。具体的には、船舶2が上方向に動いた時には、各ウィンチW1〜W4のワイヤロープ511〜514の引き出し量を増大させるべくモータ411〜414の制御量を巻出し側に補正することで、吊荷52の重心位置を一定の高さに保つことができる。
【0041】
さらに、傾斜角センサ631により検知された偏差角θx、θyを基準とした傾斜補正指令は、吊荷52の定常的な傾きを所定の値に修正するために用いるものである。例えば、船舶2に積載物の重量アンバランスのため傾きが生じていた場合や、積載の最中にアンバランスが生じて傾きが生じた場合には、こうした定常的に生じる傾きの影響を打ち消すようにして各ワイヤロープ511〜514の引き出し量を制御することで、懸架された吊荷52を水平にすること、または船舶2とは異なる任意の傾きとすることが可能となる。
【0042】
以上のように、本実施形態に係る洋上荷役システムは、同一の船舶2に取付けられる複数のウィンチW1〜W4と、それらウィンチW1〜W4よりそれぞれ引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらワイヤロープ511〜514の引き出し量を変化させ吊荷52を下降または上昇させるように前記複数のウィンチW1〜W4を制御する制御手段6とを具備するものであって、前記制御手段6が、前記船舶2に設けられる揺動検出部621と、前記吊荷52の揺動を抑制するための各ワイヤロープの引き出し量補正値を前記揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、当該揺動補正指令部82からの出力値をフィードバックして前記ウィンチW1〜W4の制御を行うように構成したものである。
【0043】
そのため、船舶2に揺動が生じた場合であっても、その影響を打ち消す方向にワイヤロープ511〜514の引き出し量を制御することができるので、船舶2に合わせた吊荷52の揺動を抑制することが可能となる。また、複数のワイヤロープ511〜514の引き出し量の補正を連動して行うことができるため、吊荷52の重心位置を変えることなく、揺動のみを抑制することが可能となる。
【0044】
また、前記制御手段6が、前記船舶2に設けられる上下動検出部611と、前記吊荷52の上下動を抑制するための各ワイヤロープ511〜514の引き出し量補正値を前記上下動検出部611からの検出値に基づいて出力する上下動補正指令部82とをさらに備え、当該上下動補正指令部82からの出力値をもフィードバックして前記ウィンチW1〜W4の制御を行うように構成したため、吊荷52の揺動の抑制に加えて、上下動も抑制して重心位置を一定の水中高度に維持することが可能となる。
【0045】
さらに、前記制御手段6が、前記船舶2に設けられる傾斜角検出部631と、前記吊荷52の定常的な傾斜を所定値に修正するための各ワイヤロープ511〜514の引き出し量補正値を前記傾斜角検出部631からの検出値に基づいて出力する傾斜補正指令部83とをさらに備え、当該傾斜補正指令部83からの出力値をもフィードバックして前記ウィンチW1〜W4の制御を行うように構成したため、船舶2の定常的な傾きによる影響をなくして、吊荷52を水平または所定の傾きとなるように設定することが可能となる。
【0046】
なお、本実施形態では揺動検出部としてジャイロセンサ621を用いたが、ジャイロセンサに代えて加速度センサを複数用いることでも同様の効果を得ることが可能である。具体的には、船舶2上に少なくとも2個の加速度センサをx軸方向に所定間隔を空けて設置し、それぞれより得られる加速度データの偏差をとることで、y軸周りの揺動を検出することが可能となる。同様に、加速度センサをy軸方向に配置することでx軸周りの揺動も検出可能となる。また、このように複数の加速度センサを設ける構成とすれば、上下動検出部および揺動検出部として兼用させることも可能である。
<第2実施形態>
【0047】
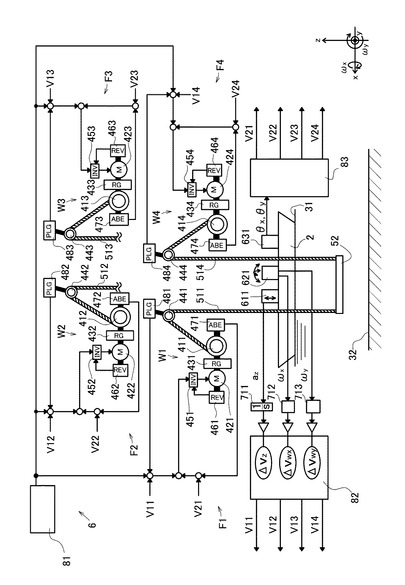
図2は、本発明の第2実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1と共通する部分には同一符号を付している。
【0048】
この第2実施形態においては、第1実施形態と同様に、制御手段6が、船舶2上に設けられたジャイロセンサ621と加速度センサ611と傾斜角センサ631とを備えるとともに、これらからの検出値を基づきウィンチW1〜W4より引き出される各ワイヤロープ511〜514の引き出し量を制御するフィードバックループをフィードバック回路部F1〜F4の中に備えている。
【0049】
そして、第1実施形態の構成に加えて、制御手段6が、各シーブ441〜444に取り付けられた張力検出部としてのロードセル641〜644を備えるとともに、これらに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。上記ロードセル641〜644は、シーブ441〜444に掛けられた各ワイヤロープ511〜514の張力を検出することができ、その検出値を出力する。
【0050】
ロードセル641〜644による張力検出値は、各々別の張力補正指令部841〜844に入力される。そして、各張力補正指令部841〜844は張力検出値を所定値に制御するよう、各ウィンチW1〜W4に対するワイヤロープ511〜514の引き出し量の補正指令値としての張力補正指令値V31〜V34を決定し、出力を行う。それらの張力補正指令値V31〜V34を、各ウィンチW1〜W4のモータ421〜424の制御量に対する補正値として加えており、こうして各フィードバック回路部F1〜F4の中に張力検出値に基づくフィードバックループを形成している。
【0051】
このように、ロードセル641〜644による張力検出値を用いて各ワイヤロープ511〜514の引き出し量を補正することによって、各ワイヤロープ511〜514の張力を所定の値に制御することや、張力に閾値を設けておいて、それ以上または以下となった時にワイヤロープ511〜514の巻出し又は巻き取り方法を変えるような制御を行うことが可能となる。
【0052】
具体的には、吊荷52を下降または上昇させている際には、ワイヤロープ511〜514の自重の増減や水の抵抗値分を加味した張力の増減パターンを目標値として、これを基に張力制御を行うことで、吊荷52に負荷を生じさせずスムーズに下降または上昇させることが可能となる。さらに、吊荷52を一定の水中高度において保持しようとするとき、船舶2の揺動や上下動に伴い慣性力によって張力の増減が生じるため、張力を一定値にとどめるよう制御することで、吊荷52の揺動や上下動を抑制することも可能である。
【0053】
また、吊荷52が海底32に着底した際には、その分張力検出値が減少するため、これが事前に設ける閾値以下となった場合には着底状態と判断した上で、それ以上は余分にワイヤロープ511〜514を引き出さないように補正指令値を与えて制御することも可能となる。さらに、吊荷52が着底状態にある際に、波や潮位の影響で船舶2が上方に移動して吊荷52が浮き上がった場合には、急激に張力が増加するため、事前に設ける閾値を超えた場合には浮き上がり状態と判断した上で、ワイヤロープ511〜514を引き出すように補正指令値を与えて制御することも可能となる。
【0054】
以上のように、第2実施形態においては、上述の第1実施形態と同様の効果に加え、次のような効果を得ることができる。すなわち、制御手段6が、ウィンチのそれぞれに設けられるワイヤロープ511〜514の張力検出部641〜644と、張力を制御するための各ワイヤロープ511〜514の引き出し量補正値を前記張力検出部641〜644からの検出値に基づいて出力する張力補正指令部841〜844とをさらに備え、当該張力補正指令部841〜844からの出力値をもフィードバックして前記ウィンチW1〜W4の制御を行うように構成したため、吊荷52の揺動や上下動を抑制することが可能であり、さらには、着底を速やかに検知でき必要以上にワイヤロープ511〜514を弛ませないようにすることができるとともに、吊荷52の浮き上がりも速やかに検知でき、吊荷52を着底させた状態で安定して維持させることが可能となる。
<第3実施形態>
【0055】
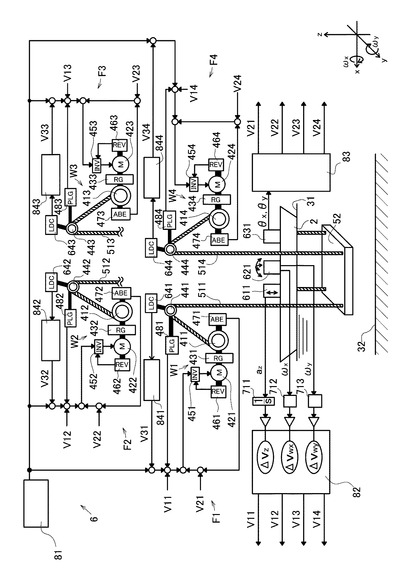
図3は、本発明の第3実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1および図2と共通する部分には同一符号を付している。
【0056】
第3実施形態は、第2実施形態の構成に加えて、制御手段6が、吊荷52に設置したジャイロセンサ622、加速度センサ612、傾斜角センサ632を備えるとともに、これらのセンサ622、612、632による検出値を基に吊荷52の揺動や上下動を抑制し、定常的傾斜を修正するためのフィードバックループをフィードバック回路部F1〜F4の中に備えるように構成したものである。このように船舶2と吊荷52の双方にジャイロセンサ622、加速度センサ612、傾斜角センサ632を設け、双方からの検出値に基づき補正指令値を決定するように構成することは、上述したように吊荷52の揺動や上下動を抑えるための制御精度の向上につながり好適である。
【0057】
以上のように、第3実施形態においては、上述の第2実施形態と同様の効果が得られるとともに、揺動や上下動および定常的傾斜に関してさらに制御精度を向上させることで、吊荷52の揺動や上下動をより減少させ、定常的な傾斜をより精度良く行うことが可能となる。
<第4実施形態>
【0058】
図4は、本発明の第4実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1〜図3と共通する部分には同一符号を付している。
【0059】
第4実施形態においては、第1〜第3実施形態よりも構成を簡略化してウィンチを2機としている。
【0060】
そして、第1〜第3実施形態と同様に、制御手段6が、洋上浮遊体である船舶2に設置したジャイロセンサ621、加速度センサ611、傾斜角センサ631を備えるとともに、これらのセンサ621、611、631による検出値を基に吊荷52の揺動や上下動を抑制し、定常的傾斜を修正するためのフィードバックループをフィードバック回路部F1、F2の中に備えるように構成している。この場合においては、吊荷52を支持するワイヤロープ511、512が2本であるために、揺動および傾斜はy軸周りの回転方向のみを補正することになる。こうした構成により、第1〜第3実施形態と同様に、好適に吊荷52の揺動や上下動の抑制、および定常的な傾斜の修正を行うことができる。
【0061】
第4実施形態では、第1〜第3実施形態と異なり、制御手段6に、揚程指令部81からの各ウィンチW1、W2への制御指令値の出力に対して潮位を基にした補正指令を出力する潮位補正指令部85を設けている。潮位補正指令部85は、図示しない外部より入力された気象データや水中高度データに基づき判断される潮位を基にして、ワイヤロープ511、512の引き出し量の補正値を決定し出力するものである。
【0062】
さらに、各ウィンチW1、W2が備えるシーブ441、442に張力検出部としてのロードセル641、642を設けており、これらはワイヤロープ511、512の張力を各々検出し、その検出値を一個の浮上補正指令部86に出力するよう構成している。この浮上補正指令部86は、張力検出値に基づいて補正指令値を出力するものであり、第2実施形態として図2を用いて上述した張力補正指令部841〜844を一個に統合したものである。浮上補正指令部86では、双方の張力検出値を比較または足し合わせた上で事前に設けた閾値とも比較することによって吊荷52の状態を判別し、その状態に応じた各ウィンチW1、W2に対するワイヤロープ引き出し量の補正指令値としての浮上補正指令値V41、V42を決定し、出力を行う。そして、浮上補正指令値V41、V42は、各ウィンチW1、W2のモータ421、422の制御量に対する補正値として加えている。このように、揚程指令部81からの基準となる指令値に対して種々の補正値が上乗せされ、それを基に周速補正指令部871、872が最終的な制御指令値を決定してインバータ451、452に出力する。
【0063】
このようにシステムを構成することで、例えば、吊荷52を海底32に着底させる際には次のようにして制御を行うことができる。通常、吊荷52を降下させていく際にはワイヤロープ511、512の自重分だけ張力が上昇していくが、着底させる際に吊荷52の片端側が先に着底した場合、その側のワイヤロープ511(512)にかかる張力が減少していく。それ以上着底側のワイヤロープ511(512)を引き出すと弛みが生じてしまうため、浮上補正指令部86では張力がある閾値を下回った際に、その側のワイヤロープ511(512)の引き出しを止めるべく補正指令を出力する。さらに、反対側のワイヤロープ512(511)に関しても同様の制御を行う。このように、各ワイヤロープ511、512の引き出し量を制御することで、ワイヤロープ511、512に必要以上の弛みを生じさせることがない。
【0064】
さらに、吊荷52を着底させた状態で長時間保持しようとする場合、各ワイヤロープ511、512の引き出し量は、まず上述の潮位補正指令部85からの指令によって潮位分の補正が行われる。しかしながら、ここでの補正量には誤差が含まれため、これのみでは不十分である。そこで、浮上補正指令部86では各ワイヤロープ511、512の張力検出値を監視しつつ、張力がある閾値を超えた場合には吊荷52が海底32を離れ浮き上がったものと判別し、吊荷52を着底状態に戻すべく各ワイヤロープ511、512の引き出し量を増加させる方向に制御するように補正指令を出力する。
【0065】
このようにして、各ワイヤロープ511、512は弛みを最小限にとどめつつ吊荷52の着底状態を維持することが可能となる。また、こうした制御を行いつつ、上述したように船舶2の揺動および上下動の影響を防ぐための補正指令を加えることで、各ワイヤロープ511、512の弛み具合を常に一定の状態に保つことができる。
【0066】
以上のように、第4実施形態においては、上述の第2実施形態と同様の効果が得られることに加え、ワイヤロープ511、512の引き出し量の補正を潮位データにも基づかせるとともに、吊荷52の着底および浮き上がりの判断を一個の浮上補正指令部86によって行わせることによって、より着底時の安定性を高めることが可能となる。
【0067】
なお、本実施形態は、x軸方向にウィンチW1、W2を配設してy軸周りの揺動を抑制するように構成したが、同様にy軸方向にウィンチW1、W2を配設してx軸周りの揺動を抑制するように構成することも可能である。
【0068】
また、本実施形態ではウィンチを2機としていたが、3機以上として同じように構成すること可能であり、その場合にはジャイロセンサを2軸型としてx軸周り方向の揺動も検出し、この方向の揺動も同時に抑制するように構成することも可能である。
<第5実施形態>
【0069】
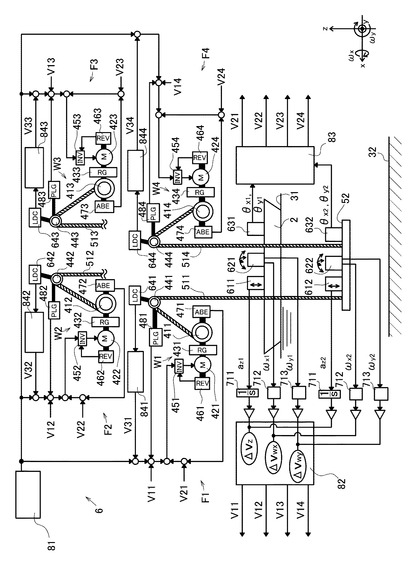
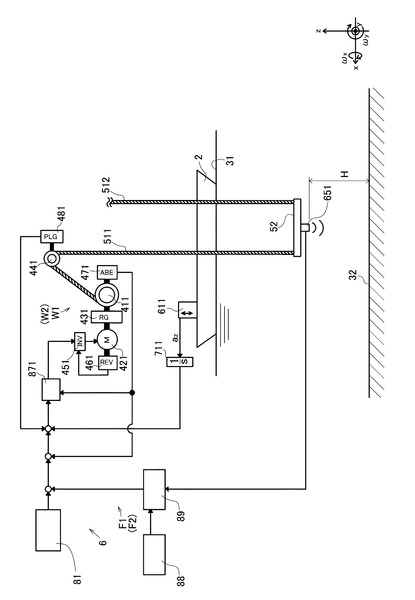
図5は、本発明の第5実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1〜図4と共通する部分には同一符号を付している。
【0070】
第5実施形態では、第4実施形態と同様にウィンチを2機としており、2本のワイヤロープ511、512で吊荷52を懸架する構成としている。図中ではワイヤロープ512の側のウィンチW2とこれを制御するためのフィードバック回路部F2を省略してあるが、ワイヤロープ511側のウィンチW1側と同様に構成し、制御手段6により同時に制御される。
【0071】
そして、第1〜第4実施形態と同様に、制御手段6が、洋上浮遊体である船舶2に設置した加速度センサ611を備えるとともに、これからの検出値を基に吊荷52の上下動を抑制するフィードバックループをフィードバック回路部F1(F2)の中に備えるように構成している。
【0072】
また、第5実施形態では、第1〜第4実施形態と異なり、制御手段6が、吊荷52に設けた水中高度検出部としての水中高度計651を備え、海底32と吊荷52との間の距離Hを水中高度値として出力させ、この値を参照しながら制御を行うことができるようなフィードバックループをフィードバック回路部F1(F2)の中に備えている。すなわち、高度補正指令部89は、水中高度指令部88より与えられる目標の水中高度と水中高度計651による検出値とを比較しながら、偏差に応じてウィンチW1、W2への制御値を決定するように構成している。具体的には、吊荷52を降下させるにあたっては、目標の水中高度近くに到達するまではウィンチW1、W2からのワイヤロープ511、512の巻出しを継続させ、偏差が小さくなった場合には減速させ、偏差が無くなった場合には巻出しを止めるよう制御値を出力する。
【0073】
さらに、吊荷52を一定の水中高度で保持しようとする場合においても、目標の水中高度と水中高度計651による検出値とを常に比較しながらウィンチW1、W2への制御値にフィードバックしているため、精度良く同じ位置を保つことができる。
【0074】
加えて、船舶2の上下動に対する影響を補正するため、加速度センサ611に基づくフィードバック制御も行っているため、上昇や下降を行っている際にも吊荷52に余分な加減速による負荷を生じさせず、一定の水中高度で保持する際にもより精度良くこれを行うことができる。さらに、加速度センサ611による制御を主体として吊荷52の上下動の補正を行う場合には、誤差の累積により実際の水中高度が目標値との間でズレが生じる可能性もあるが、水中高度計651による検出値による補正を同時に加えることで、より正確に水中高度を保持することが可能となる。
【0075】
また、同じシステム構成によって、予期せぬ海底32への衝突を避けるように構成することも可能である。その場合には、海底32から一定の高さを衝突の危険のある危険水中高度として水中高度指令部88より入力しておき、水中高度計651による測定値が当該危険水中高度以下となったときは、高度補正指令部89はワイヤロープ511、512の引き出し量を減少させる方向に制御値の変更を行うように構成する。さらに、水中高度計651を、吊荷52の底面積以上の一定領域の海底32を同時に検知しつつ当該領域内での吊荷52との最小距離を検出可能なものとすれば、海底32の起伏を問わず確実に吊荷52と海底32との衝突を防止することができる。
【0076】
以上のように、第5実施形態においては、前記制御手段6が、前記吊荷52に設けられる海底32との距離を測る水中高度計651と、前記吊荷52の水中高度を制御するためのワイヤロープ511、512の引き出し量補正値を前記水中高度計651からの検出値に基づいて出力する高度補正指令部89とをさらに備え、当該高度補正指令部89からの出力値をもフィードバックして前記ウィンチW1、W2の制御を行うように構成したため、海底32からの距離を一定とするように制御することで、一層精度良く吊荷52の上下動を抑えることが可能となり、意図せぬ海底32への衝突を防止することができる。
【0077】
なお、本実施形態は、吊荷52の海底32への衝突を防止するとともに、上下動を抑制するものとして構成していたが、第1〜第4実施形態と同様にジャイロセンサ621や傾斜センサ631も設け、同時に揺動や定常的傾斜に関する補正を加えることも可能である。
【0078】
以上、本発明の幾つかの実施形態について説明したが、各部の具体的な構成は上述した実施形態のみに限定されるものではない。
【0079】
例えば、本発明は実施形態で挙げた船舶2だけに限らず、他の洋上浮体構造物など一般的な洋上浮遊体においても適用可能である。
【0080】
また、本発明における荷役機構としてウィンチW1〜W4に代えてクレーンを用いても良く、上述の実施形態と同様の荷役システムとして構成することが可能である。
【0081】
その他の構成も本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【符号の説明】
【0082】
2…船舶(洋上浮遊体)
52…吊荷
81…揚程指令部
82…上下動・揺動補正指令部
83…傾斜補正指令部
411〜414…ウィンチドラム
421〜424…モータ
451〜454…インバータ
511〜514…ワイヤロープ
611、612…加速度センサ
621、622…ジャイロセンサ
631、632…傾斜角センサ
641〜644…ロードセル
651…水中高度計
841〜844…張力補正指令部
【技術分野】
【0001】
本発明は、船舶や洋上浮体構造物に設置されるウィンチやクレーン等の荷役機構において、波やうねりなどの影響を受けることなく、水中の吊荷を安定して保持することが可能な荷役システム及びこれを備えた洋上浮遊体に関するものである。
【背景技術】
【0002】
船舶や洋上浮体構造物に設置されるウィンチやクレーン等の荷役機構を用いて、水中の吊荷を安定して保持するための装置として、特許文献1に示すものが提案されている。
【0003】
このものは、フローティングクレーンのブームより垂下させたワイヤロープに物品を吊り下げて作業を行うときに、フローティングクレーンが上下に揺動することによってブームに作用する上下方向の加速度を検知し、この加速度からブームの上下方向の変位量を求め、前記変位量を相殺するように油圧モータを制御することによってワイヤロープを巻き出しあるいは巻き取ることによりフローティングクレーンの上下揺動による物品変位すなわち物品の揺動を抑制するようにしたものである。かかる物品を水中の吊荷に置き換えれば、洋上で当該吊荷を安定に保持することが期待できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平4−191296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、洋上で用いる荷役システムであっても、単に水上から水中にかけての荷の昇降だけを目的とするものにとどまらず、ある一定の水中高度で荷を安定的に保持したり、海底に着底させた状態で安定的に保持したりするような方法で使用する場合もある。例えば、水中の調査用機器を架台に載せた状態で水中に降ろし、一定の高さを維持しつつ使用する場合や、架台が海底に着底した状態を維持しつつ海底上への荷下ろし作業を行う場合が考えられる。そのため、一定の水中高度で維持しようとするときは、機器の測定不良や故障が生じないよう架台の上下動を抑えつつ傾きも抑制することが必要となり、不意の海底への接触などによる衝撃が生じないようにすることが必要となる。また、海底に着底させた状態を維持しようとするときは、ワイヤロープが機器に干渉しないように、すなわち必要以上に弛まないように引き出し量を制御することが必要となる。
【0006】
以上のような使用方法を想定し、荷役機構を用いて水中に吊り下げる吊荷を複数のワイヤロープで支持する構成を考えた場合、上述の技術のみでは不十分な点がある。
【0007】
具体的には、上述の技術では複数のワイヤロープを用いて吊荷を保持する場合が想定されておらず、水中で吊荷の姿勢を制御する技術について何ら開示されていないことが挙げられる。例えば、複数のワイヤロープで物品を載せる架台を懸架して協働して上下動させるような場合、個々のワイヤロープに関して独立して上記の制御を行うのみでは架台の傾きを防止することができないとともに、相互に影響し合うことで上下動が却って悪化することも考えられる。
【0008】
また、上述の技術では、洋上のクレーンのブームにのみ着目して制御を行っているため、実際の水中の吊荷の状態を正確に制御に反映することができていない。具体的には、ブームに働く加速度のみを頼りに制御を行おうとした場合、吊荷の高さ方向位置について誤差が累積し、正確に目的の高さ位置に吊荷を保持することが不能となり、最悪の場合には海底に衝突する危険も生じる。
【0009】
また、吊荷が海底に着底した状態を保持することが必要な場合には、上記の技術を用いれば吊荷の状態と無関係にワイヤの巻き出しや巻き取りを行うため、誤差の累積によってはワイヤロープが弛みすぎて吊荷に絡まったり、吊荷が海底から浮き上がったりするような問題が生じる可能性がある。
【0010】
本発明は、このような課題を有効に解決することを目的としており、具体的には、一定の水中高度を維持しようとする際には吊荷の上下動や揺動および定常的な傾きを抑制しつつ海底への衝突を生じさせないこと、さらには海底に着底させ、それを維持させる際には必要以上にワイヤロープを弛ませず浮き上がりも生じさせないことが可能な洋上荷役システム及びこれを備えた洋上浮遊体を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、かかる目的を達成するために、次のような手段を講じたものである。
【0012】
すなわち、本発明の洋上荷役システムは、同一の洋上浮遊体に取付けられる複数のウィンチ等の荷役機構と、それら荷役機構よりそれぞれ引き出され吊荷を協働して懸架するワイヤロープと、それらワイヤロープの引き出し量を変化させ吊荷を下降または上昇させるように前記複数の荷役機構を制御する制御手段とを具備するものであって、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる揺動検出部と、前記吊荷の揺動を抑制するための各ワイヤロープの引き出し量補正値を前記揺動検出部からの検出値に基づいて出力する揺動補正指令部とを備え、当該揺動補正指令部からの出力値をフィードバックして前記荷役機構の制御を行うことを特徴とする。
【0013】
このように構成すると、船側の揺動の影響を打ち消し水中の吊荷の揺動を抑制することが可能となる。また、複数のワイヤロープの引き出し量を連動して制御することで、吊荷の重心位置に影響を与えることなく揺動のみを抑え、初期の傾きを保持することが可能となる。
【0014】
さらに、吊荷の上下動をも抑制し、水中高度を一定に維持するためには、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる上下動検出部と、前記吊荷の上下動を抑制するための各ワイヤロープの引き出し量補正値を前記上下動検出部からの検出値に基づいて出力する上下動補正指令部とをさらに備え、当該上下動補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【0015】
また、洋上浮遊体の定常的な傾きによる影響を排除して、吊荷を水平または任意の傾きに修正するためには、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる傾斜角検出部と、前記吊荷の定常的な傾斜を所定値に修正するための各ワイヤロープの引き出し量補正値を前記傾斜角検出部からの検出値に基づいて出力する傾斜補正指令部とをさらに備え、当該傾斜補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【0016】
また、ワイヤロープを必要以上に弛ませず吊荷の着底状態を安定して実現するためには、前記制御手段が、前記荷役機構のそれぞれに設けられるワイヤロープの張力検出部と、張力を制御するための各ワイヤロープの引き出し量補正値を前記張力検出部からの検出値に基づいて出力する張力補正指令部とをさらに備え、当該張力補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【0017】
また、より正確に吊荷の上下動を抑えつつ海底との衝突を防止するためには、前記制御手段が、前記吊荷に設けられる海底との距離を測る水中高度検出部と、前記吊荷の水中高度を制御するための各ワイヤロープの引き出し量補正値を前記水中高度検出部からの検出値に基づいて出力する高度補正指令部とをさらに備え、当該高度補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うように構成することが好ましい。
【発明の効果】
【0018】
以上説明した本発明によれば、複数のワイヤロープを用いて吊荷作業を行う場合において、揺動検出値に基づいて各ワイヤロープの引き出し量を連動させるように補正することで吊荷の位置・姿勢・動作を制御することができ、上下動、傾斜角、張力または水中高度の各検出値に基づいた制御を加えることでさらに詳細に制御することが可能となる。
【0019】
そのため、吊荷の水中高度を一定に維持しようとする際には、吊荷の定常的な傾斜を任意の値に補正しながら揺動や上下動を抑制することができるとともに予期せぬ海底への衝突を防止することができ、吊荷を海底に着底させる際には、必要以上にワイヤロープを弛ませることなく着底状態を安定的に保持することができる洋上荷役システム及びこれを備えた洋上浮遊体を提供することが可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態に係る洋上荷役システムの模式的な構成図。
【図2】本発明の第2実施形態に係る洋上荷役システムの模式的な構成図。
【図3】本発明の第3実施形態に係る洋上荷役システムの模式的な構成図。
【図4】本発明の第4実施形態に係る洋上荷役システムの模式的な構成図。
【図5】本発明の第5実施形態に係る洋上荷役システムの模式的な構成図。
【発明を実施するための形態】
【0021】
以下、本発明の幾つかの実施形態を、図面を参照して説明する。
<第1実施形態>
【0022】
図1は、本発明の第1実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。この荷役システムは洋上浮遊体である船舶2に備え付けられた荷役機構としてのウィンチW1〜W4と、各ウィンチW1〜W4から引き出されるワイヤロープ511〜514と、各ウィンチW1〜W4を制御してワイヤロープ511〜514の引き出し量を変化させる制御手段6とを備える。ワイヤロープ511〜514はそれぞれ水中に垂下し、単一の吊荷52を協働して懸架している。
【0023】
本実施形態における吊荷52は、その上に図示しない荷物を積載することが可能なように平板状の架台として構成しており、ウィンチW1〜W4は船舶2の上でそれぞれを十分に離して設置し、それらから引き出されるワイヤロープ511〜514は架台である吊荷52のほぼ四隅と連結している。
【0024】
ウィンチW1〜W4は、大きくはワイヤロープ511〜514が巻かれた形態で収納されるウィンチドラム411〜414と、そのウィンチドラム411〜414を駆動させるための機構としてのモータ421〜424および減速機431〜434と、そのモータを駆動させるインバータ451〜454と、ウィンチドラム411〜414から繰り出されるワイヤロープ511〜514をガイドして目的の場所に垂下させるシーブ441〜444とから構成される。
【0025】
そして、これらのウィンチW1〜W4が連動して動作を行うように、制御手段6によって統合して制御を行っている。この制御手段6は主として、各ウィンチW1〜W4に対する基準指令値を決定し出力する揚程指令部81と、その基準指令値を基に各ウィンチW1〜W4を適切に制御するフィードバック回路部F1〜F4とからなる。
【0026】
揚程指令部81においては、図示しない入力部より、吊荷52を降下させる際の目標となる水中高度または水面31からの距離、ワイヤロープ511〜514の引き出し速度などの情報を得て、それらを基に各ウィンチW1〜W4のインバータ451〜454に向けて基準指令値を出力する。
【0027】
そして、フィードバック回路部F1〜F4は、各々次のような基本構成をとる。まずインバータ451〜454は上記の揚程指令部81からの基準指令値に基づきモータ421〜424を制御するが、このときモータ421〜424に取り付けられたレゾルバ461〜464による信号をフィードバックしつつ制御値を補正する。また、ウィンチドラム411〜414にはそれぞれアブソリュートエンコーダ471〜474が取り付けてあり、回転を検知しながらその信号をインバータ451〜454へとフィードバックしている。さらに、シーブ441〜444にはそれぞれパルスジェネレータ481〜484が取り付けられ、そこで検知した回転数も制御にフィードバックして用いている。
【0028】
以上のように基本構成された荷役システムは、揚程指令部81より出力される指令値を基にして、それぞれパルスジェネレータ481〜484で検知するシーブ441〜444の回転数から算出できるワイヤロープ511〜514の引き出し量を監視しながら、それが目標値となるようにモータ421〜424の駆動を制御する。その際、アブソリュートエンコーダ471〜474により検知するウィンチドラム411〜414の回転角から、ワイヤロープ511〜514の巻太りによるウィンチドラム411〜414の径変化分を換算し、その値をフィードバックすることで制御値の補正を行う。なお、アブソリュートエンコーダ471〜474に代えてパルスエンコーダを用いて同様に構成することも可能であるが、停電等からの復帰時を考慮した場合には、絶対位置を検出できるアブソリュートエンコーダ471〜474を用いることが好適である。
【0029】
さらに、本実施形態においては、制御手段6が、洋上浮遊体である船舶2の上に設けた上下動検出部として1軸型の加速度センサ611を備えるとともに、これに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。ここで、本発明において「上下動」とは、重心位置が鉛直上方向または鉛直下方向に移動することをいい、図1の右下に記載した座標軸に従えばz軸方向の移動をいうこととする。そして、上記の加速度センサ611はz軸方向の加速度azを測定が可能なものである。
【0030】
以下、各種検出部の説明をする場合においては、この座標軸に沿って行うこととする。
【0031】
さらに、本実施形態の制御手段6は、船舶2上に設けた揺動検出部としてのジャイロセンサ621を備えるとともに、これに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。ここで、本発明において「揺動」とは、ローリングとよばれる前後軸(図中のx軸)周りの運動と、ピッチングとよばれる横軸(図中のy軸)周りの運動とを指し、各々具体的には船舶2が横に傾く形態の揺れと、船首が上下動する形態の揺れに対応する。
【0032】
上記のジャイロセンサ621としては、x軸周りの角速度ωxとy軸周りの角速度ωyを測定可能な2軸型を用いた。
【0033】
加えて本実施形態の制御手段6は、船舶2の上に設置した傾斜角センサ631を備えるとともに、これに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。この傾斜角センサ631はx軸に対する偏差角θxと、y軸に対する偏差角θyとを検出できるようにしている。
【0034】
上述の加速度センサ611により検出された加速度azは積分器711を通って積分され、ジャイロセンサ621により検出されたx軸周りの角速度ωxとy軸周りの角速度ωyとはそれぞれ増幅器712、713を通って回転半径分の所定のゲインを乗じられることによって、それぞれ船舶2の上下動速度に変換されて上下動・揺動補正指令部82に入力される。そして、上下動・揺動補正指令部82では、入力された船舶2の上下動速度の値を基にして、これらの動作による吊荷52への影響を相殺するように、各ウィンチW1〜W4に対するワイヤロープ引き出し量の補正指令値としての上下動・揺動補正指令値V11〜V14を決定し、出力を行う。そして、これらの上下動・揺動補正指令値V11〜V14を、各ウィンチW1〜W4のモータ421〜424の制御量に対する補正値として加えており、こうして各フィードバック回路部F1〜F4の中に上下動と揺動の検出値に基づくフィードバックループを形成している。
【0035】
傾斜角センサ631により検出された偏差角θx、θyは、傾斜補正指令部83に入力され、吊荷52の傾きが所定の値となるように、各ウィンチW1〜W4に対するワイヤロープ引き出し量の補正指令値としての傾斜補正指令値V21〜V24を決定し、出力を行う。そして、この傾斜補正指令値V21〜V24も各ウィンチW1〜W4のモータ421〜424の制御量に対する補正値として加えており、こうして各フィードバック回路部F1〜F4の中に傾斜角(偏差角)検出値に基づくフィードバックループを形成している。
【0036】
ここで、本実施形態においては、加速度センサ611と、ジャイロセンサ621による検出値を一個の上下動・揺動補正指令部82に入力することで、共通の上下動・揺動補正指令値V11〜V14を出力させ、これを制御に用いることで、吊荷52の上下動と揺動とを同時に抑制することを可能としているが、上下動の抑制と揺動の抑制の2つの機能に分類してそれぞれを別に構成することも可能である。
【0037】
具体的には、加速度センサ611による検出値を入力し、その値を基に吊荷52の上下動を抑制するための上下動補正指令値を決定して出力する上下動補正指令部と、ジャイロセンサ621による検出値を入力し、その値を基に吊荷52の揺動を抑制するための揺動補正指令値を決定して出力する揺動補正指令部とを分けて構成し、それぞれの出力値を個別にモータ421〜424の制御量に加えるようにしても良い。本実施態様における上下動・揺動補正指令部82とは、これら上下動補正指令部と揺動補正指令部を一個に構成したものといえる。
【0038】
ここで、上述した補正指令による具体的な作用を以下に説明する。
【0039】
まず、ジャイロセンサ621による船舶2の角速度検出値を基準とした揺動補正指令は、吊荷52のx軸周りとy軸周りの揺動抑制に用いるものである。波等の影響で船舶2がいわゆるピッチング、ローリングといった揺動を行った場合でも、その影響を打ち消すようにして各ワイヤロープ511〜514の引き出し量を制御することで、懸架された吊荷52が船舶2に合わせて揺動を行うことを抑制することが可能となる。具体的には、船舶2が揺れ紙面左側が上となるような動きが生じた時、左側のウィンチW1、W2はワイヤロープ511、512の引き出し量を増大させるべくモータ411、412の制御量を巻出し側に補正し、右側のウィンチW3、W4はワイヤロープ513、514の引き出し量を減少させるべくモータ413、414の制御量を巻取り側に補正することで、吊荷52は船舶2の揺れに関わらず重心位置に影響を与えないまま初期の傾きを保つことができる。
【0040】
次に、加速度センサ611による船舶2の加速度検出値を基準とした上下動補正指令は、吊荷52の上下動、すなわちz軸方向位置の変動の抑制に用いるものである。波等の影響で船舶2に上下動が生じても、その影響を打ち消すようにして各ワイヤロープ511〜514の引き出し量を制御することで、懸架された吊荷52が船舶2に合わせて上下動を行うことを抑制することが可能となる。具体的には、船舶2が上方向に動いた時には、各ウィンチW1〜W4のワイヤロープ511〜514の引き出し量を増大させるべくモータ411〜414の制御量を巻出し側に補正することで、吊荷52の重心位置を一定の高さに保つことができる。
【0041】
さらに、傾斜角センサ631により検知された偏差角θx、θyを基準とした傾斜補正指令は、吊荷52の定常的な傾きを所定の値に修正するために用いるものである。例えば、船舶2に積載物の重量アンバランスのため傾きが生じていた場合や、積載の最中にアンバランスが生じて傾きが生じた場合には、こうした定常的に生じる傾きの影響を打ち消すようにして各ワイヤロープ511〜514の引き出し量を制御することで、懸架された吊荷52を水平にすること、または船舶2とは異なる任意の傾きとすることが可能となる。
【0042】
以上のように、本実施形態に係る洋上荷役システムは、同一の船舶2に取付けられる複数のウィンチW1〜W4と、それらウィンチW1〜W4よりそれぞれ引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらワイヤロープ511〜514の引き出し量を変化させ吊荷52を下降または上昇させるように前記複数のウィンチW1〜W4を制御する制御手段6とを具備するものであって、前記制御手段6が、前記船舶2に設けられる揺動検出部621と、前記吊荷52の揺動を抑制するための各ワイヤロープの引き出し量補正値を前記揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、当該揺動補正指令部82からの出力値をフィードバックして前記ウィンチW1〜W4の制御を行うように構成したものである。
【0043】
そのため、船舶2に揺動が生じた場合であっても、その影響を打ち消す方向にワイヤロープ511〜514の引き出し量を制御することができるので、船舶2に合わせた吊荷52の揺動を抑制することが可能となる。また、複数のワイヤロープ511〜514の引き出し量の補正を連動して行うことができるため、吊荷52の重心位置を変えることなく、揺動のみを抑制することが可能となる。
【0044】
また、前記制御手段6が、前記船舶2に設けられる上下動検出部611と、前記吊荷52の上下動を抑制するための各ワイヤロープ511〜514の引き出し量補正値を前記上下動検出部611からの検出値に基づいて出力する上下動補正指令部82とをさらに備え、当該上下動補正指令部82からの出力値をもフィードバックして前記ウィンチW1〜W4の制御を行うように構成したため、吊荷52の揺動の抑制に加えて、上下動も抑制して重心位置を一定の水中高度に維持することが可能となる。
【0045】
さらに、前記制御手段6が、前記船舶2に設けられる傾斜角検出部631と、前記吊荷52の定常的な傾斜を所定値に修正するための各ワイヤロープ511〜514の引き出し量補正値を前記傾斜角検出部631からの検出値に基づいて出力する傾斜補正指令部83とをさらに備え、当該傾斜補正指令部83からの出力値をもフィードバックして前記ウィンチW1〜W4の制御を行うように構成したため、船舶2の定常的な傾きによる影響をなくして、吊荷52を水平または所定の傾きとなるように設定することが可能となる。
【0046】
なお、本実施形態では揺動検出部としてジャイロセンサ621を用いたが、ジャイロセンサに代えて加速度センサを複数用いることでも同様の効果を得ることが可能である。具体的には、船舶2上に少なくとも2個の加速度センサをx軸方向に所定間隔を空けて設置し、それぞれより得られる加速度データの偏差をとることで、y軸周りの揺動を検出することが可能となる。同様に、加速度センサをy軸方向に配置することでx軸周りの揺動も検出可能となる。また、このように複数の加速度センサを設ける構成とすれば、上下動検出部および揺動検出部として兼用させることも可能である。
<第2実施形態>
【0047】
図2は、本発明の第2実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1と共通する部分には同一符号を付している。
【0048】
この第2実施形態においては、第1実施形態と同様に、制御手段6が、船舶2上に設けられたジャイロセンサ621と加速度センサ611と傾斜角センサ631とを備えるとともに、これらからの検出値を基づきウィンチW1〜W4より引き出される各ワイヤロープ511〜514の引き出し量を制御するフィードバックループをフィードバック回路部F1〜F4の中に備えている。
【0049】
そして、第1実施形態の構成に加えて、制御手段6が、各シーブ441〜444に取り付けられた張力検出部としてのロードセル641〜644を備えるとともに、これらに基づく後述のフィードバックループをフィードバック回路部F1〜F4の中に備えている。上記ロードセル641〜644は、シーブ441〜444に掛けられた各ワイヤロープ511〜514の張力を検出することができ、その検出値を出力する。
【0050】
ロードセル641〜644による張力検出値は、各々別の張力補正指令部841〜844に入力される。そして、各張力補正指令部841〜844は張力検出値を所定値に制御するよう、各ウィンチW1〜W4に対するワイヤロープ511〜514の引き出し量の補正指令値としての張力補正指令値V31〜V34を決定し、出力を行う。それらの張力補正指令値V31〜V34を、各ウィンチW1〜W4のモータ421〜424の制御量に対する補正値として加えており、こうして各フィードバック回路部F1〜F4の中に張力検出値に基づくフィードバックループを形成している。
【0051】
このように、ロードセル641〜644による張力検出値を用いて各ワイヤロープ511〜514の引き出し量を補正することによって、各ワイヤロープ511〜514の張力を所定の値に制御することや、張力に閾値を設けておいて、それ以上または以下となった時にワイヤロープ511〜514の巻出し又は巻き取り方法を変えるような制御を行うことが可能となる。
【0052】
具体的には、吊荷52を下降または上昇させている際には、ワイヤロープ511〜514の自重の増減や水の抵抗値分を加味した張力の増減パターンを目標値として、これを基に張力制御を行うことで、吊荷52に負荷を生じさせずスムーズに下降または上昇させることが可能となる。さらに、吊荷52を一定の水中高度において保持しようとするとき、船舶2の揺動や上下動に伴い慣性力によって張力の増減が生じるため、張力を一定値にとどめるよう制御することで、吊荷52の揺動や上下動を抑制することも可能である。
【0053】
また、吊荷52が海底32に着底した際には、その分張力検出値が減少するため、これが事前に設ける閾値以下となった場合には着底状態と判断した上で、それ以上は余分にワイヤロープ511〜514を引き出さないように補正指令値を与えて制御することも可能となる。さらに、吊荷52が着底状態にある際に、波や潮位の影響で船舶2が上方に移動して吊荷52が浮き上がった場合には、急激に張力が増加するため、事前に設ける閾値を超えた場合には浮き上がり状態と判断した上で、ワイヤロープ511〜514を引き出すように補正指令値を与えて制御することも可能となる。
【0054】
以上のように、第2実施形態においては、上述の第1実施形態と同様の効果に加え、次のような効果を得ることができる。すなわち、制御手段6が、ウィンチのそれぞれに設けられるワイヤロープ511〜514の張力検出部641〜644と、張力を制御するための各ワイヤロープ511〜514の引き出し量補正値を前記張力検出部641〜644からの検出値に基づいて出力する張力補正指令部841〜844とをさらに備え、当該張力補正指令部841〜844からの出力値をもフィードバックして前記ウィンチW1〜W4の制御を行うように構成したため、吊荷52の揺動や上下動を抑制することが可能であり、さらには、着底を速やかに検知でき必要以上にワイヤロープ511〜514を弛ませないようにすることができるとともに、吊荷52の浮き上がりも速やかに検知でき、吊荷52を着底させた状態で安定して維持させることが可能となる。
<第3実施形態>
【0055】
図3は、本発明の第3実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1および図2と共通する部分には同一符号を付している。
【0056】
第3実施形態は、第2実施形態の構成に加えて、制御手段6が、吊荷52に設置したジャイロセンサ622、加速度センサ612、傾斜角センサ632を備えるとともに、これらのセンサ622、612、632による検出値を基に吊荷52の揺動や上下動を抑制し、定常的傾斜を修正するためのフィードバックループをフィードバック回路部F1〜F4の中に備えるように構成したものである。このように船舶2と吊荷52の双方にジャイロセンサ622、加速度センサ612、傾斜角センサ632を設け、双方からの検出値に基づき補正指令値を決定するように構成することは、上述したように吊荷52の揺動や上下動を抑えるための制御精度の向上につながり好適である。
【0057】
以上のように、第3実施形態においては、上述の第2実施形態と同様の効果が得られるとともに、揺動や上下動および定常的傾斜に関してさらに制御精度を向上させることで、吊荷52の揺動や上下動をより減少させ、定常的な傾斜をより精度良く行うことが可能となる。
<第4実施形態>
【0058】
図4は、本発明の第4実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1〜図3と共通する部分には同一符号を付している。
【0059】
第4実施形態においては、第1〜第3実施形態よりも構成を簡略化してウィンチを2機としている。
【0060】
そして、第1〜第3実施形態と同様に、制御手段6が、洋上浮遊体である船舶2に設置したジャイロセンサ621、加速度センサ611、傾斜角センサ631を備えるとともに、これらのセンサ621、611、631による検出値を基に吊荷52の揺動や上下動を抑制し、定常的傾斜を修正するためのフィードバックループをフィードバック回路部F1、F2の中に備えるように構成している。この場合においては、吊荷52を支持するワイヤロープ511、512が2本であるために、揺動および傾斜はy軸周りの回転方向のみを補正することになる。こうした構成により、第1〜第3実施形態と同様に、好適に吊荷52の揺動や上下動の抑制、および定常的な傾斜の修正を行うことができる。
【0061】
第4実施形態では、第1〜第3実施形態と異なり、制御手段6に、揚程指令部81からの各ウィンチW1、W2への制御指令値の出力に対して潮位を基にした補正指令を出力する潮位補正指令部85を設けている。潮位補正指令部85は、図示しない外部より入力された気象データや水中高度データに基づき判断される潮位を基にして、ワイヤロープ511、512の引き出し量の補正値を決定し出力するものである。
【0062】
さらに、各ウィンチW1、W2が備えるシーブ441、442に張力検出部としてのロードセル641、642を設けており、これらはワイヤロープ511、512の張力を各々検出し、その検出値を一個の浮上補正指令部86に出力するよう構成している。この浮上補正指令部86は、張力検出値に基づいて補正指令値を出力するものであり、第2実施形態として図2を用いて上述した張力補正指令部841〜844を一個に統合したものである。浮上補正指令部86では、双方の張力検出値を比較または足し合わせた上で事前に設けた閾値とも比較することによって吊荷52の状態を判別し、その状態に応じた各ウィンチW1、W2に対するワイヤロープ引き出し量の補正指令値としての浮上補正指令値V41、V42を決定し、出力を行う。そして、浮上補正指令値V41、V42は、各ウィンチW1、W2のモータ421、422の制御量に対する補正値として加えている。このように、揚程指令部81からの基準となる指令値に対して種々の補正値が上乗せされ、それを基に周速補正指令部871、872が最終的な制御指令値を決定してインバータ451、452に出力する。
【0063】
このようにシステムを構成することで、例えば、吊荷52を海底32に着底させる際には次のようにして制御を行うことができる。通常、吊荷52を降下させていく際にはワイヤロープ511、512の自重分だけ張力が上昇していくが、着底させる際に吊荷52の片端側が先に着底した場合、その側のワイヤロープ511(512)にかかる張力が減少していく。それ以上着底側のワイヤロープ511(512)を引き出すと弛みが生じてしまうため、浮上補正指令部86では張力がある閾値を下回った際に、その側のワイヤロープ511(512)の引き出しを止めるべく補正指令を出力する。さらに、反対側のワイヤロープ512(511)に関しても同様の制御を行う。このように、各ワイヤロープ511、512の引き出し量を制御することで、ワイヤロープ511、512に必要以上の弛みを生じさせることがない。
【0064】
さらに、吊荷52を着底させた状態で長時間保持しようとする場合、各ワイヤロープ511、512の引き出し量は、まず上述の潮位補正指令部85からの指令によって潮位分の補正が行われる。しかしながら、ここでの補正量には誤差が含まれため、これのみでは不十分である。そこで、浮上補正指令部86では各ワイヤロープ511、512の張力検出値を監視しつつ、張力がある閾値を超えた場合には吊荷52が海底32を離れ浮き上がったものと判別し、吊荷52を着底状態に戻すべく各ワイヤロープ511、512の引き出し量を増加させる方向に制御するように補正指令を出力する。
【0065】
このようにして、各ワイヤロープ511、512は弛みを最小限にとどめつつ吊荷52の着底状態を維持することが可能となる。また、こうした制御を行いつつ、上述したように船舶2の揺動および上下動の影響を防ぐための補正指令を加えることで、各ワイヤロープ511、512の弛み具合を常に一定の状態に保つことができる。
【0066】
以上のように、第4実施形態においては、上述の第2実施形態と同様の効果が得られることに加え、ワイヤロープ511、512の引き出し量の補正を潮位データにも基づかせるとともに、吊荷52の着底および浮き上がりの判断を一個の浮上補正指令部86によって行わせることによって、より着底時の安定性を高めることが可能となる。
【0067】
なお、本実施形態は、x軸方向にウィンチW1、W2を配設してy軸周りの揺動を抑制するように構成したが、同様にy軸方向にウィンチW1、W2を配設してx軸周りの揺動を抑制するように構成することも可能である。
【0068】
また、本実施形態ではウィンチを2機としていたが、3機以上として同じように構成すること可能であり、その場合にはジャイロセンサを2軸型としてx軸周り方向の揺動も検出し、この方向の揺動も同時に抑制するように構成することも可能である。
<第5実施形態>
【0069】
図5は、本発明の第5実施形態に係る洋上荷役システムのシステム構成を模式的に示す図である。図1〜図4と共通する部分には同一符号を付している。
【0070】
第5実施形態では、第4実施形態と同様にウィンチを2機としており、2本のワイヤロープ511、512で吊荷52を懸架する構成としている。図中ではワイヤロープ512の側のウィンチW2とこれを制御するためのフィードバック回路部F2を省略してあるが、ワイヤロープ511側のウィンチW1側と同様に構成し、制御手段6により同時に制御される。
【0071】
そして、第1〜第4実施形態と同様に、制御手段6が、洋上浮遊体である船舶2に設置した加速度センサ611を備えるとともに、これからの検出値を基に吊荷52の上下動を抑制するフィードバックループをフィードバック回路部F1(F2)の中に備えるように構成している。
【0072】
また、第5実施形態では、第1〜第4実施形態と異なり、制御手段6が、吊荷52に設けた水中高度検出部としての水中高度計651を備え、海底32と吊荷52との間の距離Hを水中高度値として出力させ、この値を参照しながら制御を行うことができるようなフィードバックループをフィードバック回路部F1(F2)の中に備えている。すなわち、高度補正指令部89は、水中高度指令部88より与えられる目標の水中高度と水中高度計651による検出値とを比較しながら、偏差に応じてウィンチW1、W2への制御値を決定するように構成している。具体的には、吊荷52を降下させるにあたっては、目標の水中高度近くに到達するまではウィンチW1、W2からのワイヤロープ511、512の巻出しを継続させ、偏差が小さくなった場合には減速させ、偏差が無くなった場合には巻出しを止めるよう制御値を出力する。
【0073】
さらに、吊荷52を一定の水中高度で保持しようとする場合においても、目標の水中高度と水中高度計651による検出値とを常に比較しながらウィンチW1、W2への制御値にフィードバックしているため、精度良く同じ位置を保つことができる。
【0074】
加えて、船舶2の上下動に対する影響を補正するため、加速度センサ611に基づくフィードバック制御も行っているため、上昇や下降を行っている際にも吊荷52に余分な加減速による負荷を生じさせず、一定の水中高度で保持する際にもより精度良くこれを行うことができる。さらに、加速度センサ611による制御を主体として吊荷52の上下動の補正を行う場合には、誤差の累積により実際の水中高度が目標値との間でズレが生じる可能性もあるが、水中高度計651による検出値による補正を同時に加えることで、より正確に水中高度を保持することが可能となる。
【0075】
また、同じシステム構成によって、予期せぬ海底32への衝突を避けるように構成することも可能である。その場合には、海底32から一定の高さを衝突の危険のある危険水中高度として水中高度指令部88より入力しておき、水中高度計651による測定値が当該危険水中高度以下となったときは、高度補正指令部89はワイヤロープ511、512の引き出し量を減少させる方向に制御値の変更を行うように構成する。さらに、水中高度計651を、吊荷52の底面積以上の一定領域の海底32を同時に検知しつつ当該領域内での吊荷52との最小距離を検出可能なものとすれば、海底32の起伏を問わず確実に吊荷52と海底32との衝突を防止することができる。
【0076】
以上のように、第5実施形態においては、前記制御手段6が、前記吊荷52に設けられる海底32との距離を測る水中高度計651と、前記吊荷52の水中高度を制御するためのワイヤロープ511、512の引き出し量補正値を前記水中高度計651からの検出値に基づいて出力する高度補正指令部89とをさらに備え、当該高度補正指令部89からの出力値をもフィードバックして前記ウィンチW1、W2の制御を行うように構成したため、海底32からの距離を一定とするように制御することで、一層精度良く吊荷52の上下動を抑えることが可能となり、意図せぬ海底32への衝突を防止することができる。
【0077】
なお、本実施形態は、吊荷52の海底32への衝突を防止するとともに、上下動を抑制するものとして構成していたが、第1〜第4実施形態と同様にジャイロセンサ621や傾斜センサ631も設け、同時に揺動や定常的傾斜に関する補正を加えることも可能である。
【0078】
以上、本発明の幾つかの実施形態について説明したが、各部の具体的な構成は上述した実施形態のみに限定されるものではない。
【0079】
例えば、本発明は実施形態で挙げた船舶2だけに限らず、他の洋上浮体構造物など一般的な洋上浮遊体においても適用可能である。
【0080】
また、本発明における荷役機構としてウィンチW1〜W4に代えてクレーンを用いても良く、上述の実施形態と同様の荷役システムとして構成することが可能である。
【0081】
その他の構成も本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【符号の説明】
【0082】
2…船舶(洋上浮遊体)
52…吊荷
81…揚程指令部
82…上下動・揺動補正指令部
83…傾斜補正指令部
411〜414…ウィンチドラム
421〜424…モータ
451〜454…インバータ
511〜514…ワイヤロープ
611、612…加速度センサ
621、622…ジャイロセンサ
631、632…傾斜角センサ
641〜644…ロードセル
651…水中高度計
841〜844…張力補正指令部
【特許請求の範囲】
【請求項1】
同一の洋上浮遊体に取付けられる複数のウィンチ等の荷役機構と、それら荷役機構よりそれぞれ引き出され吊荷を協働して懸架するワイヤロープと、それらワイヤロープの引き出し量を変化させ吊荷を下降または上昇させるように前記複数の荷役機構を制御する制御手段とを具備するものであって、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる揺動検出部と、前記吊荷の揺動を抑制するための各ワイヤロープの引き出し量補正値を前記揺動検出部からの検出値に基づいて出力する揺動補正指令部とを備え、当該揺動補正指令部からの出力値をフィードバックして前記荷役機構の制御を行うことを特徴とする洋上荷役システム。
【請求項2】
前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる上下動検出部と、前記吊荷の上下動を抑制するための各ワイヤロープの引き出し量補正値を前記上下動検出部からの検出値に基づいて出力する上下動補正指令部とをさらに備え、当該上下動補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1の洋上荷役システム。
【請求項3】
前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる傾斜角検出部と、前記吊荷の定常的な傾斜を所定値に修正するための各ワイヤロープの引き出し量補正値を前記傾斜角検出部からの検出値に基づいて出力する傾斜補正指令部とをさらに備え、当該傾斜補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1または2に記載の洋上荷役システム。
【請求項4】
前記制御手段が、前記荷役機構のそれぞれに設けられるワイヤロープの張力検出部と、張力を制御するための各ワイヤロープの引き出し量補正値を前記張力検出部からの検出値に基づいて出力する張力補正指令部とをさらに備え、当該張力補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1〜3のいずれかに記載の洋上荷役システム。
【請求項5】
前記制御手段が、前記吊荷に設けられる海底との距離を測る水中高度検出部と、前記吊荷の水中高度を制御するための各ワイヤロープの引き出し量補正値を前記水中高度検出部からの検出値に基づいて出力する高度補正指令部とをさらに備え、当該高度補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1〜4のいずれかに記載の洋上荷役システム。
【請求項6】
請求項1〜5の何れかに記載の洋上荷役システムを備えた船舶、洋上浮体構造物その他の洋上浮遊体。
【請求項1】
同一の洋上浮遊体に取付けられる複数のウィンチ等の荷役機構と、それら荷役機構よりそれぞれ引き出され吊荷を協働して懸架するワイヤロープと、それらワイヤロープの引き出し量を変化させ吊荷を下降または上昇させるように前記複数の荷役機構を制御する制御手段とを具備するものであって、前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる揺動検出部と、前記吊荷の揺動を抑制するための各ワイヤロープの引き出し量補正値を前記揺動検出部からの検出値に基づいて出力する揺動補正指令部とを備え、当該揺動補正指令部からの出力値をフィードバックして前記荷役機構の制御を行うことを特徴とする洋上荷役システム。
【請求項2】
前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる上下動検出部と、前記吊荷の上下動を抑制するための各ワイヤロープの引き出し量補正値を前記上下動検出部からの検出値に基づいて出力する上下動補正指令部とをさらに備え、当該上下動補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1の洋上荷役システム。
【請求項3】
前記制御手段が、前記洋上浮遊体または前記吊荷の少なくともいずれか一方に設けられる傾斜角検出部と、前記吊荷の定常的な傾斜を所定値に修正するための各ワイヤロープの引き出し量補正値を前記傾斜角検出部からの検出値に基づいて出力する傾斜補正指令部とをさらに備え、当該傾斜補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1または2に記載の洋上荷役システム。
【請求項4】
前記制御手段が、前記荷役機構のそれぞれに設けられるワイヤロープの張力検出部と、張力を制御するための各ワイヤロープの引き出し量補正値を前記張力検出部からの検出値に基づいて出力する張力補正指令部とをさらに備え、当該張力補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1〜3のいずれかに記載の洋上荷役システム。
【請求項5】
前記制御手段が、前記吊荷に設けられる海底との距離を測る水中高度検出部と、前記吊荷の水中高度を制御するための各ワイヤロープの引き出し量補正値を前記水中高度検出部からの検出値に基づいて出力する高度補正指令部とをさらに備え、当該高度補正指令部からの出力値をもフィードバックして前記荷役機構の制御を行うことを特徴とする請求項1〜4のいずれかに記載の洋上荷役システム。
【請求項6】
請求項1〜5の何れかに記載の洋上荷役システムを備えた船舶、洋上浮体構造物その他の洋上浮遊体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−188212(P2012−188212A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−52480(P2011−52480)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
[ Back to top ]