
洗浄装置および自動分析装置
【課題】反応容器の内壁側面に付着した汚れを除去するのに十分な洗浄液の流れを確実に形成し、反応容器内部の汚れを十分に洗浄すること。
【解決手段】洗浄装置20は、供給ノズル211と、先端が供給ノズル211の先端よりも若干鉛直方向下方に位置する吸引ノズル213と、先端が供給ノズル211の先端よりも鉛直方向上方に位置するオーバーフローノズル215とで構成されるノズル部21を備える。供給ノズル211は、反応液や洗浄水が保持される部分の面積よりも大きい内径面積を有する。そして、供給ノズル211は、その外壁面と反応容器Cの内壁面全域との間に、供給ノズル211から供給される洗浄水を流通させる間隙を有するように配置される。供給ノズル211から供給された洗浄水は、供給ノズル211の外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引される。
【解決手段】洗浄装置20は、供給ノズル211と、先端が供給ノズル211の先端よりも若干鉛直方向下方に位置する吸引ノズル213と、先端が供給ノズル211の先端よりも鉛直方向上方に位置するオーバーフローノズル215とで構成されるノズル部21を備える。供給ノズル211は、反応液や洗浄水が保持される部分の面積よりも大きい内径面積を有する。そして、供給ノズル211は、その外壁面と反応容器Cの内壁面全域との間に、供給ノズル211から供給される洗浄水を流通させる間隙を有するように配置される。供給ノズル211から供給された洗浄水は、供給ノズル211の外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、洗浄装置、およびこの洗浄装置を備えた自動分析装置に関する。
【背景技術】
【0002】
従来から、反応容器に試薬と検体とを分注し、反応容器内で生じた反応を光学的に検出することによって検体の分析等を行う自動分析装置が知られている。また、この自動分析装置に備えられ、分析が終了した反応容器を洗浄する洗浄装置が知られている(特許文献1参照)。この特許文献1の技術によれば、分析に用いられた反応容器をその都度洗浄し、繰り返し使用することができる。
【0003】
【特許文献1】特開昭62−228951号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、反応容器の内径に対して、反応容器内に洗浄液を供給する供給ノズルの径が小さい。したがって、反応容器の内壁側面に沿って、当該反応容器の内壁側面に付着した汚れを除去するのに十分な洗浄液の流れを形成することはできなかった。このため、反応容器の内壁側面に付着した汚れを除去しきれず、反応容器内部を十分に洗い流すことができないという問題があった。
【0005】
本発明は、上記した従来の問題点に鑑み為されたものであり、反応容器の内壁側面に付着した汚れを除去するのに十分な洗浄液の流れを確実に形成し、反応容器内部の汚れを十分に洗浄することができる洗浄装置および自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するため、本発明に係る洗浄装置は、液体を保持する容器内部に挿入されて当該容器内部を洗浄する洗浄装置において、前記容器内部に挿入された際に、その外壁面と前記容器の内壁面全域との間に間隙を有するように配置され、前記容器内部を洗浄する洗浄液を当該容器内部へ供給する供給ノズルと、先端が前記容器上部に配置されるとともに、前記供給ノズルによって供給された前記洗浄液を前記容器外部へ排出する排出ノズルと、を備え、前記供給ノズルは、前記容器内部に挿入された部分を含む前記容器の断面において、液体が保持される部分の面積よりも大きい内径面積を有することを特徴とする。
【0007】
また、本発明に係る洗浄装置は、上記の発明において、前記排出ノズルによる排出開始タイミングと、前記供給ノズルによる供給開始タイミングとを制御し、前記排出ノズルによる排出を、前記供給ノズルによる供給よりも先に開始させるタイミング制御手段を備えることを特徴とする。
【0008】
また、本発明に係る洗浄装置は、上記の発明において、前記供給ノズルの外壁面と前記容器の内壁面全域との間を流通する前記洗浄液の流通速度が、前記供給ノズルから前記容器内部へ供給される前記洗浄液の供給速度よりも速いことを特徴とする。
【0009】
また、本発明に係る洗浄装置は、上記の発明において、前記供給ノズルは、断面形状が前記容器の断面形状と相似であることを特徴とする。
【0010】
また、本発明に係る洗浄装置は、上記の発明において、前記供給ノズルによる前記洗浄液の供給前に、前記容器内部に保持されている液体を吸引する吸引ノズルを備え、前記吸引ノズルは、前記供給ノズルの内部に配置されることを特徴とする。
【0011】
また、本発明に係る自動分析装置は、上記構成の洗浄装置を備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、液体を保持する容器内部に挿入されて当該容器内部を洗浄する洗浄装置において、容器内部を洗浄する洗浄液を当該容器内部へ供給する供給ノズルの、容器内部に挿入された部分を含む前記容器の断面における内径面積を、液体が保持される部分の面積よりも大きくする。そして、供給ノズルが容器内部に挿入された際に、当該供給ノズルの外壁面と前記容器の内壁面全域との間に前記洗浄液を流通させる間隙を有するように配置する。そうすることにより、供給ノズルの外壁面と容器の内壁面全域との間に供給ノズルから供給される洗浄水の速い流れを形成することができるので、容器の内壁面に付着した汚れを洗い流し、内部の汚れを十分に洗浄することができる。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照し、本発明の好適な実施の形態について詳細に説明する。
【0014】
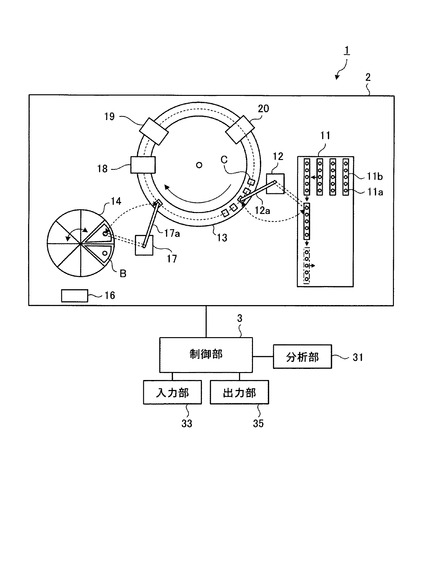
図1は、本実施の形態にかかる自動分析装置1の構成を示す模式図である。図1に示すように、自動分析装置1は、複数の検体の生化学的、免疫学的あるいは遺伝学的な分析を自動的に行う装置であり、分析対象の検体と試薬とを反応容器Cにそれぞれ分注し、分注した反応容器C内で生じる反応を光学的に測定する測定機構2を備える。この測定機構2は、検体搬送機構11と、検体分注機構12と、反応テーブル13と、試薬庫14と、読取装置16と、試薬分注機構17と、攪拌装置18と、測定光学系19と、洗浄装置20とを備える。
【0015】
検体搬送機構11は、血液や尿等の検体を収容した複数の検体容器11aを保持し、図中の矢印方向に順次搬送する複数の検体ラック11bを備える。検体搬送機構11上の所定の検体吸引位置に搬送された検体容器11a内の検体は、検体分注機構12によって、反応テーブル13上に配列して搬送される反応容器Cに分注される。
【0016】
検体分注機構12は、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行うアーム12aを備え、このアーム12aに、検体の吸引および吐出を行うプローブが取り付けられて構成されている。検体分注機構12は、検体搬送機構11上の検体吸引位置に搬送された検体容器11aからプローブによって検体を吸引する。そして、アーム12aを回動させ、反応テーブル13上の検体吐出位置に搬送された反応容器Cに検体を吐出して分注を行う。検体分注機構12のプローブは、分注終了後、洗浄水が供給される不図示の洗浄槽で流水・洗浄される。
【0017】
反応テーブル13は、それぞれ検体および試薬が分注される複数の反応容器Cが配置される。この反応テーブル13は、制御部3の制御のもと、不図示の駆動機構によって、反応テーブル13の中心を回転軸として回動自在に構成されており、反応容器Cを、検体吐出位置や試薬吐出位置、攪拌位置、測光位置、洗浄装置20下方の所定位置の各位置に反応容器Cを搬送する。なお、反応テーブル13は、この反応テーブル13は、図示しない円盤状の蓋によって覆われている。また、反応テーブル13の下方には不図示の恒温槽が設けられており、内部を覆う蓋とともに、内部の温度を体温程度の温度に保温する保温槽を構成している。
【0018】
試薬庫14は、それぞれ分析項目に応じた所定の試薬を収容した複数の試薬容器Bを収納する。この試薬庫14は、制御部3の制御のもと、不図示の駆動機構によって、その中心を回転軸として回動自在に構成されており、所望の試薬容器Bを所定の試薬吸引位置まで搬送する。なお、試薬庫14は、図示しない円盤状の蓋によって覆われている。また、試薬庫14の下方にはそれぞれ不図示の恒温槽が設けられており、内部を覆う蓋とともに、各試薬容器Bに収容された試薬を恒温状態に保つ保冷庫を構成している。これにより、試薬の蒸発や変性を抑制することができる。
【0019】
この試薬庫14の外周側には、読取装置16が配設されている。読取装置16は、例えばバーコードリーダであって、試薬庫14に収納された試薬容器Bに付された図示しないバーコードを読み取って試薬情報を取得する。試薬容器Bに付されるバーコードは、この試薬容器Bに収容された試薬に関する試薬情報を所定の規格に従ってコード化したものであり、試薬情報としては、例えば、試薬の名称、ロット番号、有効期限等の情報が適宜含まれる。そして、この読取装置16によって取得される試薬情報に基づいて、試薬容器B内の試薬の認識・選別が行われる。
【0020】
試薬分注機構17は、検体分注機構12と同様の動作と構成になっており、試薬の吸引および吐出を行うプローブが取り付けられたアーム17aを備える。アーム17aは、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行う。試薬分注機構17は、試薬庫14上の試薬吸引位置に搬送された試薬容器B内の試薬をプローブによって吸引する。そして、アーム17aを回動させ、反応テーブル13上の試薬吐出位置に搬送された反応容器Cに試薬を吐出して分注を行う。試薬分注機構17のプローブは、分注終了後、洗浄水が供給される不図示の洗浄槽で流水・洗浄される。
【0021】
攪拌装置18は、不図示の撹拌棒によって、攪拌位置に搬送された反応容器Cに分注された検体と試薬との攪拌を行い、反応を促進させる。攪拌棒は、攪拌終了後、洗浄水が供給される不図示の洗浄槽で流水・洗浄される。
【0022】
測定光学系19は、測光位置に搬送された反応容器Cに光を照射し、反応容器C内の反応液を透過した光を受光して強度測定を行う。この測定光学系19による測定結果は、制御部3に出力され、分析部31において分析される。
【0023】
洗浄装置20は、測定光学系19による測定が終了して装置下方の所定位置に搬送された反応容器Cを洗浄対象として、この反応容器C内部の反応液を吸引して排出するとともに、洗剤または洗浄水等の洗浄液を供給および吸引することによって、反応容器C内の洗浄を行う。なお、本実施の形態では、洗浄装置20が洗浄水を供給および吸引することによって反応容器C内の洗浄を行うこととして説明する。ここで洗浄された反応容器Cは、再び検体分注機構12のプローブによって検体が分注され、分析に使用される。
【0024】
また、自動分析装置1は、測定機構2を構成する各部を制御し、装置全体の動作を統括的に制御する制御部3を備える。制御部3は、分析結果の他、自動分析装置1の動作に必要な各種データを保持するメモリを内蔵したマイクロコンピュータ等で構成され、装置内の適所に収められるものであるが、図1では便宜上装置外に示している。この制御部3は、分析部31と接続されており、測光光学系19による測定結果が適宜出力されるようになっている。分析部31は、測光光学系19による測定結果に基づいて検体の成分濃度等を分析し、分析結果を制御部3に出力する。また、制御部3は、検体数や分析項目等、分析に必要な情報を入力するためのキーボードやマウス等の入力装置で構成される入力部33や、分析結果の出力や警告表示等するためのディスプレイやプリンタ等の出力装置で構成される出力部35と接続されている。
【0025】
上記構成の自動分析装置1では、反応テーブル13上を順次搬送される複数の反応容器Cに対し、検体分注機構12が検体容器11a中の検体を分注し、試薬分注機構17が試薬容器B中の試薬を分注する。続いて、攪拌装置18が反応容器C内の試薬と検体とを撹拌して反応させた後、測光光学系19が反応させた状態の試料の分光強度測定を行う。そして、測定結果を分析部31が分析することで、検体の成分分析等が自動的に行われる。また、洗浄装置20が測光光学系19による測定が終了した反応容器Cの洗浄を行い、一連の分析動作が連続して繰り返し行われる。
【0026】
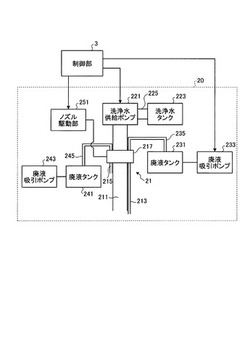
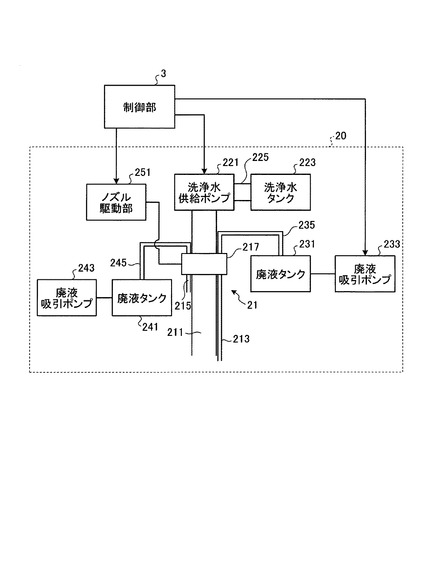
次に、洗浄装置20について説明する。図2は、洗浄装置20の構成を説明する概念図である。
【0027】
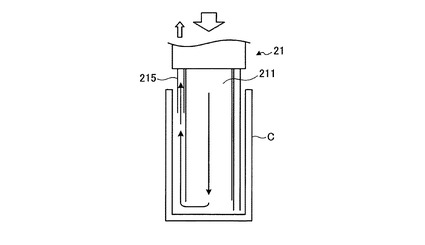
図2に示すように、洗浄装置20は、供給ノズル211と、先端が供給ノズル211の先端よりも若干鉛直方向下方に位置する吸引ノズル213と、先端が供給ノズル211の先端よりも鉛直方向上方に位置する排出ノズルであるオーバーフローノズル215とで構成されるノズル部21を備える。このノズル部21を構成する各ノズル211,213,215は、ホルダ217によって固定され、反応テーブル13上の所定位置に搬送された洗浄対象の反応容器C上方に配置される。
【0028】
供給ノズル211は、洗浄水供給ポンプ221を設けた水供給管225によって、例えば純水等の洗浄水を貯留した洗浄水タンク223と接続されており、洗浄対象の反応容器C内に洗浄水を供給する。吸引ノズル213は、廃液吸引管235によって廃液を貯留する廃液タンク231および廃液吸引ポンプ233と接続されており、反応容器C内部に保持される反応液を吸引する。吸引ノズル213によって吸引された反応液は、廃液タンク231から外部へ廃棄される。また、オーバーフローノズル215は、廃液吸引管245によって廃液を貯留する廃液タンク241および廃液吸引ポンプ243と接続されており、供給ノズル211によって反応容器C内部に供給された洗浄水を吸引し、反応容器C外部へ排出する。オーバーフローノズル215によって吸引された洗浄水は、廃液タンク231から外部へ廃棄される。
【0029】
また、洗浄装置20は、ノズル部21を昇降動作させるノズル駆動部251を備え、洗浄対象の反応容器Cの内部に対してノズル部21を進退移動させる。
【0030】
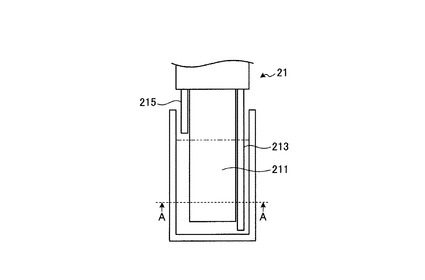
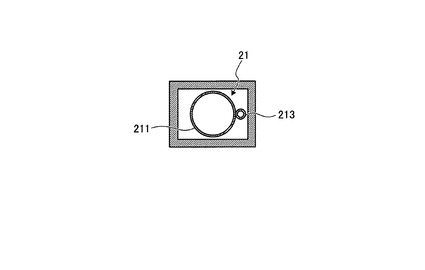
図3−1は、ノズル部21を下降させて洗浄対象の反応容器C内部に挿入し、洗浄位置に移動させた状態を示す図であり、反応容器Cの側面の一部を切り欠いて内部の様子を示している。また、図3−2は、図3−1のA−A矢視断面図である。図3−1に示すように、供給ノズル211と吸引ノズル213は、ノズル部21を反応容器Cの内部に挿入して洗浄位置に移動させた際、その先端が反応容器Cの底部近傍に位置するようになっている。一方、オーバーフローノズル215は、その先端が反応容器Cの上部開口よりも若干下方に位置するようになっている。より詳細には、図3−1中において、反応容器C内部に保持される反応液の液面を二点鎖線で示しているが、ノズル部21を洗浄位置に移動させた際に、オーバーフローノズル215の先端は、この反応液の液面よりも鉛直方向上方になるように配置される。
【0031】
また、図3−2に示すように、供給ノズル211は、反応液や洗浄水が保持される部分の面積よりも大きい内径面積を有する。そして、供給ノズル211は、その外壁面と反応容器Cの内壁面全域との間に、供給ノズル211から供給される洗浄水を流通させる間隙を有するように配置され、この間隙が洗浄水を反応容器Cの上部に導く通路となる。これにより、供給ノズル211から供給された洗浄水は、供給ノズル211の外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引される。
【0032】
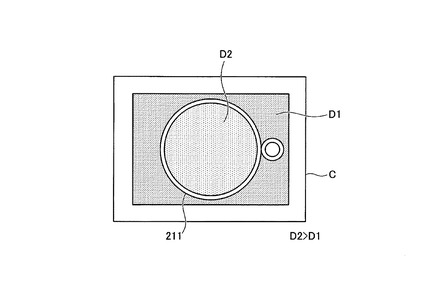
図4は、供給ノズル211の反応容器C内部に挿入された部分を含む当該反応容器Cの断面における、反応液や洗浄水が保持される部分の面積と供給ノズル211の内径面積との大小関係を説明する説明図である。図4に示すように、供給ノズル211の内径面積D2は、反応液や洗浄水が保持される部分の面積D1よりも大きい。このように、供給ノズル211の内径が大きいため、この間隙を流通する洗浄水の流通速度が、供給ノズル211から反応容器Cの内部へ供給される洗浄水の供給速度よりも速くなる。これにより、反応容器Cの底部から上部に流れる洗浄水の流通速度が確保される。したがって、反応容器Cの内壁側面全域に、反応容器Cの内壁側面に付着した汚れを除去するのに十分な洗浄水の流れが確実に形成される。
【0033】
そして、図2に示すように、制御部3が、洗浄水供給ポンプ221、廃液吸引ポンプ233,243、ノズル駆動部251の各部の動作を制御することによって、反応容器Cの洗浄動作が行われ、反応容器Cの内部が洗浄される。
【0034】
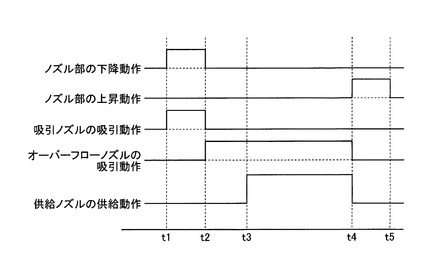
図5は、洗浄装置20の各部の動作の流れを説明するタイミングチャートであり、ノズル部21の下降動作および上昇動作、供給ノズル211の供給動作、吸引ノズル213の吸引動作、オーバーフローノズル215の吸引動作の動作タイミングを示している。また、図6−1,2は、反応容器Cの洗浄動作を説明する図である。
【0035】
図5に示すように、制御部3は、先ず、ノズル駆動部251および廃液吸引ポンプ233を制御して、ノズル部21の下降動作と吸引ノズル213の吸引動作とを同時に開始させる(t1)。これにより、ノズル部21は、図6−1に示すように、吸引ノズル213によって反応容器C内に保持されている反応液を吸引しながら、初期位置から下降して、図6−2に示すように反応容器C内部に漸次挿入され、洗浄位置まで移動する。
【0036】
ノズル部21が洗浄位置に移動したならば、制御部3は、図5に示すように、ノズル駆動部251を制御してノズル部21の下降動作を停止させ、廃液吸引ポンプ233を制御して吸引ノズル213の吸引動作を停止させるとともに、廃液吸引ポンプ243を制御してオーバーフローノズル215の吸引動作を開始させる(t2)。そして、このオーバーフローノズル215の吸引動作を開始させてから所定時間経過した後、洗浄水供給ポンプ221を制御して供給ノズル211の供給動作を開始させる(t3)。ここで、オーバーフローノズル215の吸引力は、供給ノズル211の供給力より大きくなるように予め設定される。このように、オーバーフローノズル215の吸引動作の開始タイミングと供給ノズル211の供給動作の開始タイミングとの間に時間差を設けるとともに、オーバーフローノズル215の吸引力を供給ノズル211の注入力より大きくすることで、反応容器Cの上部から洗浄水が溢れ出ないようにすることができる。なお、時点t1〜時点t2の間の所定のタイミングでオーバーフローノズル215の吸引動作を開始させ、廃液吸引ポンプ233の吸引動作の停止時(t2)に、供給ノズル211の供給動作を開始させるようにしてもよい。これにより、図6−2に示すように、供給ノズル211から反応容器Cの内部に洗浄水が供給される。供給ノズル211から供給された洗浄水は、図6−2中に矢印で示すように、反応容器Cの底面を流れる。そして、供給ノズル211の外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引される。
【0037】
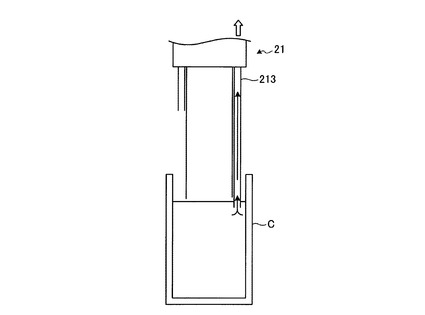
以上の洗浄動作によって反応容器C内部の洗浄が終了したならば、図5に示すように、制御部3は、廃液吸引ポンプ243および洗浄水供給ポンプ221を制御して、オーバーフローノズル215の吸引動作および供給ノズル211の供給動作を停止させるとともに、ノズル駆動部251を制御して、ノズル部21の上昇動作を開始させる(t4)。ノズル部21が反応容器C上方の初期位置まで移動したならば、制御部3は、ノズル駆動部251を制御して、ノズル部21の上昇動作を停止させる(t5)。なお、制御部3は、時点t4においてオーバーフローノズル215の吸引動作を停止させた後、ノズル部21の上昇動作を開始させる前に廃液吸引ポンプ233を制御し、所定の時間吸引ノズル213に吸引動作を行わせることとしてもよい。これによれば、反応容器Cの底面に残存する洗浄水を吸引することができる。
【0038】
以上説明した実施の形態によれば、反応容器Cの内部に洗浄水を供給する供給ノズル211の、反応容器C内部に挿入された部分を含む当該反応容器Cの断面における内径面積を、反応液や洗浄水が保持される部分の面積よりも大きくした。さらに、その外壁面と反応容器Cの内壁面全域との間に供給ノズル211から供給される洗浄水を流通させる間隙を有するように供給ノズル211を配置したため、洗浄水を反応容器Cの上部に導く通路を形成することができる。さらに、間隙を流通する洗浄水の流通速度が供給ノズル211から反応容器Cの内部へ供給される洗浄水の供給速度よりも速くなる。したがって、反応容器Cの内壁側面に付着した汚れを洗い流し、内部の汚れを十分に洗浄することができる。さらに、オーバーフローノズル215の吸引力を供給ノズル211の供給力よりも大きく設定しているため、反応容器Cからの洗浄水のあふれを防止することができる。
【0039】
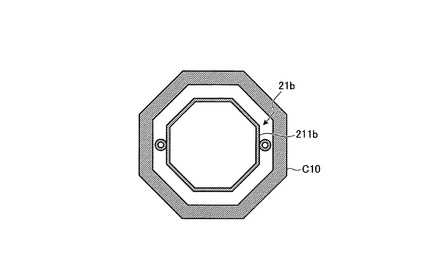
なお、洗浄水を供給する供給ノズルの構成は、上記した実施の形態の構成に限定されるものではない。図7は、変形例に係る供給ノズル211bの構成を示す図であり、本供給ノズル211bを備えたノズル部21bを洗浄位置に移動させた際の反応容器C10の横断面図である。図7に示すように、供給ノズル211bは、断面形状が、反応容器C10の断面形状である八角形状を有し、その外径が、反応容器C10の内径よりも僅かに小さく、内径面積が、反応液や洗浄水が保持される部分の面積よりも大きくなるように形成される。本変形例によれば、間隙を流通する洗浄水の流通速度が供給ノズル211bから反応容器C10の内部へ供給される洗浄水の供給速度よりも速くなる。さらに、供給ノズル211bの断面形状が反応容器C10の断面形状と相似形状を有するので、供給ノズル211bから供給された洗浄水を、供給ノズル211bの外壁面と、反応容器C10の各内壁面との間の間隙に均一に流通させることができる。したがって、反応容器C10の内壁側面に付着した汚れをより確実に除去することができる。
【0040】
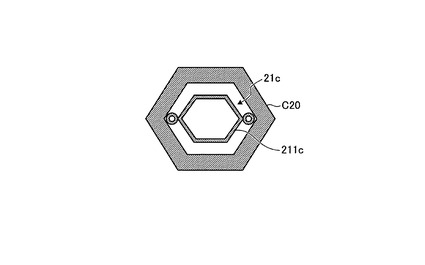
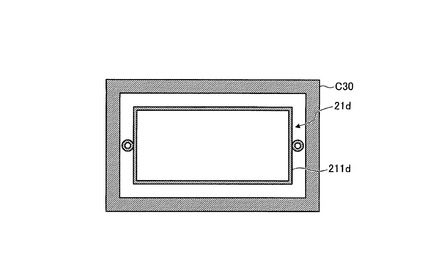
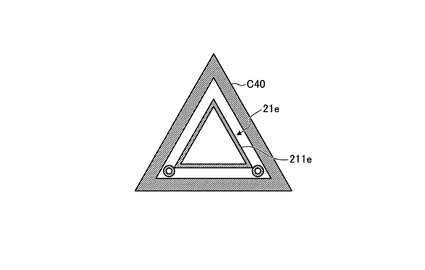
また、図8〜9は、供給ノズルの構成の他の変形例を示す図である。例えば、図8に示すように、反応容器C20の断面形状が六角形状の場合には、断面形状がこの反応容器C20の断面形状と相似の六角形状の供給ノズル211cを用いてノズル部21cを構成してもよい。また、図9に示すように、反応容器C30の断面形状が長方形等の矩形形状ならば、断面形状がこの反応容器C30の断面形状と相似の矩形形状の供給ノズル211dを用いてノズル部21dを構成してもよい。或いは、図10に示すように、反応容器C40の断面形状が三角形状ならば、断面形状がこの反応容器C40の断面形状と相似の三角形状の供給ノズル211eを用いてノズル部21eを構成してもよい。
【0041】
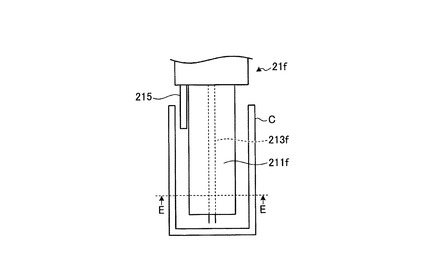
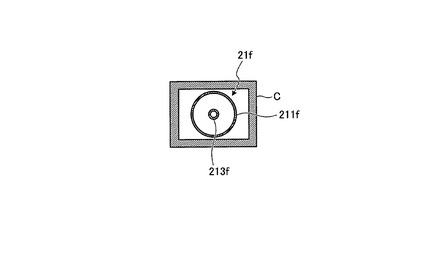
また、ノズル部21fの構成は、上記した実施の形態の構成に限定されるものではない。図11−1は、ノズル部の構成の変形例を示す図であり、本変形例に係るノズル部21fを洗浄対象の反応容器C内部に挿入し、洗浄位置に移動させた状態を示している。また、図11−2は、図11−1のE−E矢視断面図である。図11−2に示すように、本ノズル部21fは、供給ノズル211fと、オーバーフローノズル215と、吸引ノズル213fとを備え、吸引ノズル213fは、その中心軸が供給ノズル211fの中心軸と一致するように、供給ノズル211fの内部に配置されて構成されている。
【0042】
そして、図11−2に示すように、供給ノズル211fは、反応液や洗浄水が保持される部分の面積よりも大きい内径面積を有する。そして、供給ノズル211fは、その外壁面と反応容器Cの内壁面全域との間に供給ノズル211fから供給される洗浄水を流通させる間隙を有するように配置され、この間隙によって、洗浄水を反応容器Cの上部に導く通路が形成される。これによれば、供給ノズル211fから供給された洗浄水は、供給ノズル部21fの外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引されるので、上記した実施の形態と同様に、反応容器Cの底部から上部に流れる洗浄水の流通速度を確保し、反応容器Cの内壁側面に沿う洗浄水の流れを確実に形成することができる。また、吸引ノズル213fによる吸引を、供給ノズル211fの中心、すなわち反応容器Cの中心で行うことができるので、バランスのよい吸引が実現できる。例えば、オーバーフローノズル215の吸引動作を停止させた後、所定の時間吸引ノズル213に吸引動作を行わせることにより、反応容器Cの底面に残存する洗浄水を各方向からバランスよく吸引することができる。
【0043】
また、上記した実施形態では、図5に示して説明したように、オーバーフローノズル215による吸引動作の開始タイミングと供給ノズル211による供給動作の開始タイミングとの間に時間差を設けることとしたが、これらの動作を同時に開始させることも可能である。この場合には、動作初期におけるオーバーフローノズル215の吸引力を、供給ノズル211の供給力に対して時間差を設ける場合よりも十分大きく設定する。
【0044】
また、上記した実施の形態では、自動分析装置1に具備される試薬収納庫が2つの場合について説明したが、試薬収納庫は1つであってもよい。
【図面の簡単な説明】
【0045】
【図1】自動分析装置の構成を示す模式図である。
【図2】洗浄装置の構成を説明する概念図である。
【図3−1】ノズル部を洗浄位置に移動させた状態を示す図である。
【図3−2】図3−1のA−A矢視断面図である。
【図4】反応液や洗浄水が保持される部分の面積と供給ノズルの内径面積との大小関係を説明する説明図である。
【図5】洗浄装置の各部の動作の流れを説明するタイミングチャートである。
【図6−1】反応容器の洗浄動作を説明する図である。
【図6−2】反応容器の洗浄動作を説明する図である。
【図7】供給ノズルの構成の変形例を示す図である。
【図8】供給ノズルの構成の他の変形例を示す図である。
【図9】供給ノズルの構成の他の変形例を示す図である。
【図10】供給ノズルの構成の他の変形例を示す図である。
【図11−1】ノズル部の構成の変形例を示す図である。
【図11−2】図11−1のE−E矢視断面図である。
【符号の説明】
【0046】
1 自動分析装置
2 測定機構
11 検体搬送機構
12 検体分注機構
13 反応テーブル
14 試薬庫
16 読取装置
17 試薬分注機構
18 攪拌装置
19 測定光学系
20 洗浄装置
21 ノズル部
211 供給ノズル
213 吸引ノズル
215 オーバーフローノズル
217 ホルダ
221 洗浄水供給ポンプ
223 洗浄水タンク
225 水供給管
231,241 廃液タンク
233,243 廃液吸引ポンプ
235,245 吸引管
251 ノズル駆動部
3 制御部
C 反応容器
【技術分野】
【0001】
本発明は、洗浄装置、およびこの洗浄装置を備えた自動分析装置に関する。
【背景技術】
【0002】
従来から、反応容器に試薬と検体とを分注し、反応容器内で生じた反応を光学的に検出することによって検体の分析等を行う自動分析装置が知られている。また、この自動分析装置に備えられ、分析が終了した反応容器を洗浄する洗浄装置が知られている(特許文献1参照)。この特許文献1の技術によれば、分析に用いられた反応容器をその都度洗浄し、繰り返し使用することができる。
【0003】
【特許文献1】特開昭62−228951号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、反応容器の内径に対して、反応容器内に洗浄液を供給する供給ノズルの径が小さい。したがって、反応容器の内壁側面に沿って、当該反応容器の内壁側面に付着した汚れを除去するのに十分な洗浄液の流れを形成することはできなかった。このため、反応容器の内壁側面に付着した汚れを除去しきれず、反応容器内部を十分に洗い流すことができないという問題があった。
【0005】
本発明は、上記した従来の問題点に鑑み為されたものであり、反応容器の内壁側面に付着した汚れを除去するのに十分な洗浄液の流れを確実に形成し、反応容器内部の汚れを十分に洗浄することができる洗浄装置および自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するため、本発明に係る洗浄装置は、液体を保持する容器内部に挿入されて当該容器内部を洗浄する洗浄装置において、前記容器内部に挿入された際に、その外壁面と前記容器の内壁面全域との間に間隙を有するように配置され、前記容器内部を洗浄する洗浄液を当該容器内部へ供給する供給ノズルと、先端が前記容器上部に配置されるとともに、前記供給ノズルによって供給された前記洗浄液を前記容器外部へ排出する排出ノズルと、を備え、前記供給ノズルは、前記容器内部に挿入された部分を含む前記容器の断面において、液体が保持される部分の面積よりも大きい内径面積を有することを特徴とする。
【0007】
また、本発明に係る洗浄装置は、上記の発明において、前記排出ノズルによる排出開始タイミングと、前記供給ノズルによる供給開始タイミングとを制御し、前記排出ノズルによる排出を、前記供給ノズルによる供給よりも先に開始させるタイミング制御手段を備えることを特徴とする。
【0008】
また、本発明に係る洗浄装置は、上記の発明において、前記供給ノズルの外壁面と前記容器の内壁面全域との間を流通する前記洗浄液の流通速度が、前記供給ノズルから前記容器内部へ供給される前記洗浄液の供給速度よりも速いことを特徴とする。
【0009】
また、本発明に係る洗浄装置は、上記の発明において、前記供給ノズルは、断面形状が前記容器の断面形状と相似であることを特徴とする。
【0010】
また、本発明に係る洗浄装置は、上記の発明において、前記供給ノズルによる前記洗浄液の供給前に、前記容器内部に保持されている液体を吸引する吸引ノズルを備え、前記吸引ノズルは、前記供給ノズルの内部に配置されることを特徴とする。
【0011】
また、本発明に係る自動分析装置は、上記構成の洗浄装置を備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、液体を保持する容器内部に挿入されて当該容器内部を洗浄する洗浄装置において、容器内部を洗浄する洗浄液を当該容器内部へ供給する供給ノズルの、容器内部に挿入された部分を含む前記容器の断面における内径面積を、液体が保持される部分の面積よりも大きくする。そして、供給ノズルが容器内部に挿入された際に、当該供給ノズルの外壁面と前記容器の内壁面全域との間に前記洗浄液を流通させる間隙を有するように配置する。そうすることにより、供給ノズルの外壁面と容器の内壁面全域との間に供給ノズルから供給される洗浄水の速い流れを形成することができるので、容器の内壁面に付着した汚れを洗い流し、内部の汚れを十分に洗浄することができる。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照し、本発明の好適な実施の形態について詳細に説明する。
【0014】
図1は、本実施の形態にかかる自動分析装置1の構成を示す模式図である。図1に示すように、自動分析装置1は、複数の検体の生化学的、免疫学的あるいは遺伝学的な分析を自動的に行う装置であり、分析対象の検体と試薬とを反応容器Cにそれぞれ分注し、分注した反応容器C内で生じる反応を光学的に測定する測定機構2を備える。この測定機構2は、検体搬送機構11と、検体分注機構12と、反応テーブル13と、試薬庫14と、読取装置16と、試薬分注機構17と、攪拌装置18と、測定光学系19と、洗浄装置20とを備える。
【0015】
検体搬送機構11は、血液や尿等の検体を収容した複数の検体容器11aを保持し、図中の矢印方向に順次搬送する複数の検体ラック11bを備える。検体搬送機構11上の所定の検体吸引位置に搬送された検体容器11a内の検体は、検体分注機構12によって、反応テーブル13上に配列して搬送される反応容器Cに分注される。
【0016】
検体分注機構12は、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行うアーム12aを備え、このアーム12aに、検体の吸引および吐出を行うプローブが取り付けられて構成されている。検体分注機構12は、検体搬送機構11上の検体吸引位置に搬送された検体容器11aからプローブによって検体を吸引する。そして、アーム12aを回動させ、反応テーブル13上の検体吐出位置に搬送された反応容器Cに検体を吐出して分注を行う。検体分注機構12のプローブは、分注終了後、洗浄水が供給される不図示の洗浄槽で流水・洗浄される。
【0017】
反応テーブル13は、それぞれ検体および試薬が分注される複数の反応容器Cが配置される。この反応テーブル13は、制御部3の制御のもと、不図示の駆動機構によって、反応テーブル13の中心を回転軸として回動自在に構成されており、反応容器Cを、検体吐出位置や試薬吐出位置、攪拌位置、測光位置、洗浄装置20下方の所定位置の各位置に反応容器Cを搬送する。なお、反応テーブル13は、この反応テーブル13は、図示しない円盤状の蓋によって覆われている。また、反応テーブル13の下方には不図示の恒温槽が設けられており、内部を覆う蓋とともに、内部の温度を体温程度の温度に保温する保温槽を構成している。
【0018】
試薬庫14は、それぞれ分析項目に応じた所定の試薬を収容した複数の試薬容器Bを収納する。この試薬庫14は、制御部3の制御のもと、不図示の駆動機構によって、その中心を回転軸として回動自在に構成されており、所望の試薬容器Bを所定の試薬吸引位置まで搬送する。なお、試薬庫14は、図示しない円盤状の蓋によって覆われている。また、試薬庫14の下方にはそれぞれ不図示の恒温槽が設けられており、内部を覆う蓋とともに、各試薬容器Bに収容された試薬を恒温状態に保つ保冷庫を構成している。これにより、試薬の蒸発や変性を抑制することができる。
【0019】
この試薬庫14の外周側には、読取装置16が配設されている。読取装置16は、例えばバーコードリーダであって、試薬庫14に収納された試薬容器Bに付された図示しないバーコードを読み取って試薬情報を取得する。試薬容器Bに付されるバーコードは、この試薬容器Bに収容された試薬に関する試薬情報を所定の規格に従ってコード化したものであり、試薬情報としては、例えば、試薬の名称、ロット番号、有効期限等の情報が適宜含まれる。そして、この読取装置16によって取得される試薬情報に基づいて、試薬容器B内の試薬の認識・選別が行われる。
【0020】
試薬分注機構17は、検体分注機構12と同様の動作と構成になっており、試薬の吸引および吐出を行うプローブが取り付けられたアーム17aを備える。アーム17aは、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行う。試薬分注機構17は、試薬庫14上の試薬吸引位置に搬送された試薬容器B内の試薬をプローブによって吸引する。そして、アーム17aを回動させ、反応テーブル13上の試薬吐出位置に搬送された反応容器Cに試薬を吐出して分注を行う。試薬分注機構17のプローブは、分注終了後、洗浄水が供給される不図示の洗浄槽で流水・洗浄される。
【0021】
攪拌装置18は、不図示の撹拌棒によって、攪拌位置に搬送された反応容器Cに分注された検体と試薬との攪拌を行い、反応を促進させる。攪拌棒は、攪拌終了後、洗浄水が供給される不図示の洗浄槽で流水・洗浄される。
【0022】
測定光学系19は、測光位置に搬送された反応容器Cに光を照射し、反応容器C内の反応液を透過した光を受光して強度測定を行う。この測定光学系19による測定結果は、制御部3に出力され、分析部31において分析される。
【0023】
洗浄装置20は、測定光学系19による測定が終了して装置下方の所定位置に搬送された反応容器Cを洗浄対象として、この反応容器C内部の反応液を吸引して排出するとともに、洗剤または洗浄水等の洗浄液を供給および吸引することによって、反応容器C内の洗浄を行う。なお、本実施の形態では、洗浄装置20が洗浄水を供給および吸引することによって反応容器C内の洗浄を行うこととして説明する。ここで洗浄された反応容器Cは、再び検体分注機構12のプローブによって検体が分注され、分析に使用される。
【0024】
また、自動分析装置1は、測定機構2を構成する各部を制御し、装置全体の動作を統括的に制御する制御部3を備える。制御部3は、分析結果の他、自動分析装置1の動作に必要な各種データを保持するメモリを内蔵したマイクロコンピュータ等で構成され、装置内の適所に収められるものであるが、図1では便宜上装置外に示している。この制御部3は、分析部31と接続されており、測光光学系19による測定結果が適宜出力されるようになっている。分析部31は、測光光学系19による測定結果に基づいて検体の成分濃度等を分析し、分析結果を制御部3に出力する。また、制御部3は、検体数や分析項目等、分析に必要な情報を入力するためのキーボードやマウス等の入力装置で構成される入力部33や、分析結果の出力や警告表示等するためのディスプレイやプリンタ等の出力装置で構成される出力部35と接続されている。
【0025】
上記構成の自動分析装置1では、反応テーブル13上を順次搬送される複数の反応容器Cに対し、検体分注機構12が検体容器11a中の検体を分注し、試薬分注機構17が試薬容器B中の試薬を分注する。続いて、攪拌装置18が反応容器C内の試薬と検体とを撹拌して反応させた後、測光光学系19が反応させた状態の試料の分光強度測定を行う。そして、測定結果を分析部31が分析することで、検体の成分分析等が自動的に行われる。また、洗浄装置20が測光光学系19による測定が終了した反応容器Cの洗浄を行い、一連の分析動作が連続して繰り返し行われる。
【0026】
次に、洗浄装置20について説明する。図2は、洗浄装置20の構成を説明する概念図である。
【0027】
図2に示すように、洗浄装置20は、供給ノズル211と、先端が供給ノズル211の先端よりも若干鉛直方向下方に位置する吸引ノズル213と、先端が供給ノズル211の先端よりも鉛直方向上方に位置する排出ノズルであるオーバーフローノズル215とで構成されるノズル部21を備える。このノズル部21を構成する各ノズル211,213,215は、ホルダ217によって固定され、反応テーブル13上の所定位置に搬送された洗浄対象の反応容器C上方に配置される。
【0028】
供給ノズル211は、洗浄水供給ポンプ221を設けた水供給管225によって、例えば純水等の洗浄水を貯留した洗浄水タンク223と接続されており、洗浄対象の反応容器C内に洗浄水を供給する。吸引ノズル213は、廃液吸引管235によって廃液を貯留する廃液タンク231および廃液吸引ポンプ233と接続されており、反応容器C内部に保持される反応液を吸引する。吸引ノズル213によって吸引された反応液は、廃液タンク231から外部へ廃棄される。また、オーバーフローノズル215は、廃液吸引管245によって廃液を貯留する廃液タンク241および廃液吸引ポンプ243と接続されており、供給ノズル211によって反応容器C内部に供給された洗浄水を吸引し、反応容器C外部へ排出する。オーバーフローノズル215によって吸引された洗浄水は、廃液タンク231から外部へ廃棄される。
【0029】
また、洗浄装置20は、ノズル部21を昇降動作させるノズル駆動部251を備え、洗浄対象の反応容器Cの内部に対してノズル部21を進退移動させる。
【0030】
図3−1は、ノズル部21を下降させて洗浄対象の反応容器C内部に挿入し、洗浄位置に移動させた状態を示す図であり、反応容器Cの側面の一部を切り欠いて内部の様子を示している。また、図3−2は、図3−1のA−A矢視断面図である。図3−1に示すように、供給ノズル211と吸引ノズル213は、ノズル部21を反応容器Cの内部に挿入して洗浄位置に移動させた際、その先端が反応容器Cの底部近傍に位置するようになっている。一方、オーバーフローノズル215は、その先端が反応容器Cの上部開口よりも若干下方に位置するようになっている。より詳細には、図3−1中において、反応容器C内部に保持される反応液の液面を二点鎖線で示しているが、ノズル部21を洗浄位置に移動させた際に、オーバーフローノズル215の先端は、この反応液の液面よりも鉛直方向上方になるように配置される。
【0031】
また、図3−2に示すように、供給ノズル211は、反応液や洗浄水が保持される部分の面積よりも大きい内径面積を有する。そして、供給ノズル211は、その外壁面と反応容器Cの内壁面全域との間に、供給ノズル211から供給される洗浄水を流通させる間隙を有するように配置され、この間隙が洗浄水を反応容器Cの上部に導く通路となる。これにより、供給ノズル211から供給された洗浄水は、供給ノズル211の外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引される。
【0032】
図4は、供給ノズル211の反応容器C内部に挿入された部分を含む当該反応容器Cの断面における、反応液や洗浄水が保持される部分の面積と供給ノズル211の内径面積との大小関係を説明する説明図である。図4に示すように、供給ノズル211の内径面積D2は、反応液や洗浄水が保持される部分の面積D1よりも大きい。このように、供給ノズル211の内径が大きいため、この間隙を流通する洗浄水の流通速度が、供給ノズル211から反応容器Cの内部へ供給される洗浄水の供給速度よりも速くなる。これにより、反応容器Cの底部から上部に流れる洗浄水の流通速度が確保される。したがって、反応容器Cの内壁側面全域に、反応容器Cの内壁側面に付着した汚れを除去するのに十分な洗浄水の流れが確実に形成される。
【0033】
そして、図2に示すように、制御部3が、洗浄水供給ポンプ221、廃液吸引ポンプ233,243、ノズル駆動部251の各部の動作を制御することによって、反応容器Cの洗浄動作が行われ、反応容器Cの内部が洗浄される。
【0034】
図5は、洗浄装置20の各部の動作の流れを説明するタイミングチャートであり、ノズル部21の下降動作および上昇動作、供給ノズル211の供給動作、吸引ノズル213の吸引動作、オーバーフローノズル215の吸引動作の動作タイミングを示している。また、図6−1,2は、反応容器Cの洗浄動作を説明する図である。
【0035】
図5に示すように、制御部3は、先ず、ノズル駆動部251および廃液吸引ポンプ233を制御して、ノズル部21の下降動作と吸引ノズル213の吸引動作とを同時に開始させる(t1)。これにより、ノズル部21は、図6−1に示すように、吸引ノズル213によって反応容器C内に保持されている反応液を吸引しながら、初期位置から下降して、図6−2に示すように反応容器C内部に漸次挿入され、洗浄位置まで移動する。
【0036】
ノズル部21が洗浄位置に移動したならば、制御部3は、図5に示すように、ノズル駆動部251を制御してノズル部21の下降動作を停止させ、廃液吸引ポンプ233を制御して吸引ノズル213の吸引動作を停止させるとともに、廃液吸引ポンプ243を制御してオーバーフローノズル215の吸引動作を開始させる(t2)。そして、このオーバーフローノズル215の吸引動作を開始させてから所定時間経過した後、洗浄水供給ポンプ221を制御して供給ノズル211の供給動作を開始させる(t3)。ここで、オーバーフローノズル215の吸引力は、供給ノズル211の供給力より大きくなるように予め設定される。このように、オーバーフローノズル215の吸引動作の開始タイミングと供給ノズル211の供給動作の開始タイミングとの間に時間差を設けるとともに、オーバーフローノズル215の吸引力を供給ノズル211の注入力より大きくすることで、反応容器Cの上部から洗浄水が溢れ出ないようにすることができる。なお、時点t1〜時点t2の間の所定のタイミングでオーバーフローノズル215の吸引動作を開始させ、廃液吸引ポンプ233の吸引動作の停止時(t2)に、供給ノズル211の供給動作を開始させるようにしてもよい。これにより、図6−2に示すように、供給ノズル211から反応容器Cの内部に洗浄水が供給される。供給ノズル211から供給された洗浄水は、図6−2中に矢印で示すように、反応容器Cの底面を流れる。そして、供給ノズル211の外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引される。
【0037】
以上の洗浄動作によって反応容器C内部の洗浄が終了したならば、図5に示すように、制御部3は、廃液吸引ポンプ243および洗浄水供給ポンプ221を制御して、オーバーフローノズル215の吸引動作および供給ノズル211の供給動作を停止させるとともに、ノズル駆動部251を制御して、ノズル部21の上昇動作を開始させる(t4)。ノズル部21が反応容器C上方の初期位置まで移動したならば、制御部3は、ノズル駆動部251を制御して、ノズル部21の上昇動作を停止させる(t5)。なお、制御部3は、時点t4においてオーバーフローノズル215の吸引動作を停止させた後、ノズル部21の上昇動作を開始させる前に廃液吸引ポンプ233を制御し、所定の時間吸引ノズル213に吸引動作を行わせることとしてもよい。これによれば、反応容器Cの底面に残存する洗浄水を吸引することができる。
【0038】
以上説明した実施の形態によれば、反応容器Cの内部に洗浄水を供給する供給ノズル211の、反応容器C内部に挿入された部分を含む当該反応容器Cの断面における内径面積を、反応液や洗浄水が保持される部分の面積よりも大きくした。さらに、その外壁面と反応容器Cの内壁面全域との間に供給ノズル211から供給される洗浄水を流通させる間隙を有するように供給ノズル211を配置したため、洗浄水を反応容器Cの上部に導く通路を形成することができる。さらに、間隙を流通する洗浄水の流通速度が供給ノズル211から反応容器Cの内部へ供給される洗浄水の供給速度よりも速くなる。したがって、反応容器Cの内壁側面に付着した汚れを洗い流し、内部の汚れを十分に洗浄することができる。さらに、オーバーフローノズル215の吸引力を供給ノズル211の供給力よりも大きく設定しているため、反応容器Cからの洗浄水のあふれを防止することができる。
【0039】
なお、洗浄水を供給する供給ノズルの構成は、上記した実施の形態の構成に限定されるものではない。図7は、変形例に係る供給ノズル211bの構成を示す図であり、本供給ノズル211bを備えたノズル部21bを洗浄位置に移動させた際の反応容器C10の横断面図である。図7に示すように、供給ノズル211bは、断面形状が、反応容器C10の断面形状である八角形状を有し、その外径が、反応容器C10の内径よりも僅かに小さく、内径面積が、反応液や洗浄水が保持される部分の面積よりも大きくなるように形成される。本変形例によれば、間隙を流通する洗浄水の流通速度が供給ノズル211bから反応容器C10の内部へ供給される洗浄水の供給速度よりも速くなる。さらに、供給ノズル211bの断面形状が反応容器C10の断面形状と相似形状を有するので、供給ノズル211bから供給された洗浄水を、供給ノズル211bの外壁面と、反応容器C10の各内壁面との間の間隙に均一に流通させることができる。したがって、反応容器C10の内壁側面に付着した汚れをより確実に除去することができる。
【0040】
また、図8〜9は、供給ノズルの構成の他の変形例を示す図である。例えば、図8に示すように、反応容器C20の断面形状が六角形状の場合には、断面形状がこの反応容器C20の断面形状と相似の六角形状の供給ノズル211cを用いてノズル部21cを構成してもよい。また、図9に示すように、反応容器C30の断面形状が長方形等の矩形形状ならば、断面形状がこの反応容器C30の断面形状と相似の矩形形状の供給ノズル211dを用いてノズル部21dを構成してもよい。或いは、図10に示すように、反応容器C40の断面形状が三角形状ならば、断面形状がこの反応容器C40の断面形状と相似の三角形状の供給ノズル211eを用いてノズル部21eを構成してもよい。
【0041】
また、ノズル部21fの構成は、上記した実施の形態の構成に限定されるものではない。図11−1は、ノズル部の構成の変形例を示す図であり、本変形例に係るノズル部21fを洗浄対象の反応容器C内部に挿入し、洗浄位置に移動させた状態を示している。また、図11−2は、図11−1のE−E矢視断面図である。図11−2に示すように、本ノズル部21fは、供給ノズル211fと、オーバーフローノズル215と、吸引ノズル213fとを備え、吸引ノズル213fは、その中心軸が供給ノズル211fの中心軸と一致するように、供給ノズル211fの内部に配置されて構成されている。
【0042】
そして、図11−2に示すように、供給ノズル211fは、反応液や洗浄水が保持される部分の面積よりも大きい内径面積を有する。そして、供給ノズル211fは、その外壁面と反応容器Cの内壁面全域との間に供給ノズル211fから供給される洗浄水を流通させる間隙を有するように配置され、この間隙によって、洗浄水を反応容器Cの上部に導く通路が形成される。これによれば、供給ノズル211fから供給された洗浄水は、供給ノズル部21fの外壁面と反応容器Cの内壁面との間の間隙を流通し、オーバーフローノズル215により吸引されるので、上記した実施の形態と同様に、反応容器Cの底部から上部に流れる洗浄水の流通速度を確保し、反応容器Cの内壁側面に沿う洗浄水の流れを確実に形成することができる。また、吸引ノズル213fによる吸引を、供給ノズル211fの中心、すなわち反応容器Cの中心で行うことができるので、バランスのよい吸引が実現できる。例えば、オーバーフローノズル215の吸引動作を停止させた後、所定の時間吸引ノズル213に吸引動作を行わせることにより、反応容器Cの底面に残存する洗浄水を各方向からバランスよく吸引することができる。
【0043】
また、上記した実施形態では、図5に示して説明したように、オーバーフローノズル215による吸引動作の開始タイミングと供給ノズル211による供給動作の開始タイミングとの間に時間差を設けることとしたが、これらの動作を同時に開始させることも可能である。この場合には、動作初期におけるオーバーフローノズル215の吸引力を、供給ノズル211の供給力に対して時間差を設ける場合よりも十分大きく設定する。
【0044】
また、上記した実施の形態では、自動分析装置1に具備される試薬収納庫が2つの場合について説明したが、試薬収納庫は1つであってもよい。
【図面の簡単な説明】
【0045】
【図1】自動分析装置の構成を示す模式図である。
【図2】洗浄装置の構成を説明する概念図である。
【図3−1】ノズル部を洗浄位置に移動させた状態を示す図である。
【図3−2】図3−1のA−A矢視断面図である。
【図4】反応液や洗浄水が保持される部分の面積と供給ノズルの内径面積との大小関係を説明する説明図である。
【図5】洗浄装置の各部の動作の流れを説明するタイミングチャートである。
【図6−1】反応容器の洗浄動作を説明する図である。
【図6−2】反応容器の洗浄動作を説明する図である。
【図7】供給ノズルの構成の変形例を示す図である。
【図8】供給ノズルの構成の他の変形例を示す図である。
【図9】供給ノズルの構成の他の変形例を示す図である。
【図10】供給ノズルの構成の他の変形例を示す図である。
【図11−1】ノズル部の構成の変形例を示す図である。
【図11−2】図11−1のE−E矢視断面図である。
【符号の説明】
【0046】
1 自動分析装置
2 測定機構
11 検体搬送機構
12 検体分注機構
13 反応テーブル
14 試薬庫
16 読取装置
17 試薬分注機構
18 攪拌装置
19 測定光学系
20 洗浄装置
21 ノズル部
211 供給ノズル
213 吸引ノズル
215 オーバーフローノズル
217 ホルダ
221 洗浄水供給ポンプ
223 洗浄水タンク
225 水供給管
231,241 廃液タンク
233,243 廃液吸引ポンプ
235,245 吸引管
251 ノズル駆動部
3 制御部
C 反応容器
【特許請求の範囲】
【請求項1】
液体を保持する容器内部に挿入されて当該容器内部を洗浄する洗浄装置において、
前記容器内部に挿入された際に、その外壁面と前記容器の内壁面全域との間に間隙を有するように配置され、前記容器内部を洗浄する洗浄液を当該容器内部へ供給する供給ノズルと、
先端が前記容器上部に配置されるとともに、前記供給ノズルによって供給された前記洗浄液を前記容器外部へ排出する排出ノズルと、
を備え、前記供給ノズルは、前記容器内部に挿入された部分を含む前記容器の断面において、液体が保持される部分の面積よりも大きい内径面積を有することを特徴とする洗浄装置。
【請求項2】
前記排出ノズルによる排出開始タイミングと、前記供給ノズルによる供給開始タイミングとを制御し、前記排出ノズルによる排出を、前記供給ノズルによる供給よりも先に開始させるタイミング制御手段を備えることを特徴とする請求項1に記載の洗浄装置。
【請求項3】
前記供給ノズルの外壁面と前記容器の内壁面全域との間を流通する前記洗浄液の流通速度が、前記供給ノズルから前記容器内部へ供給される前記洗浄液の供給速度よりも速いことを特徴とする請求項1に記載の洗浄装置。
【請求項4】
前記供給ノズルは、断面形状が前記容器の断面形状と相似であることを特徴とする請求項1に記載の洗浄装置。
【請求項5】
前記供給ノズルによる前記洗浄液の供給前に、前記容器内部に保持されている液体を吸引する吸引ノズルを備え、
前記吸引ノズルは、前記供給ノズルの内部に配置されることを特徴とする請求項1に記載の洗浄装置。
【請求項6】
請求項1〜5の何れか一つに記載の洗浄装置を備えることを特徴とする自動分析装置。
【請求項1】
液体を保持する容器内部に挿入されて当該容器内部を洗浄する洗浄装置において、
前記容器内部に挿入された際に、その外壁面と前記容器の内壁面全域との間に間隙を有するように配置され、前記容器内部を洗浄する洗浄液を当該容器内部へ供給する供給ノズルと、
先端が前記容器上部に配置されるとともに、前記供給ノズルによって供給された前記洗浄液を前記容器外部へ排出する排出ノズルと、
を備え、前記供給ノズルは、前記容器内部に挿入された部分を含む前記容器の断面において、液体が保持される部分の面積よりも大きい内径面積を有することを特徴とする洗浄装置。
【請求項2】
前記排出ノズルによる排出開始タイミングと、前記供給ノズルによる供給開始タイミングとを制御し、前記排出ノズルによる排出を、前記供給ノズルによる供給よりも先に開始させるタイミング制御手段を備えることを特徴とする請求項1に記載の洗浄装置。
【請求項3】
前記供給ノズルの外壁面と前記容器の内壁面全域との間を流通する前記洗浄液の流通速度が、前記供給ノズルから前記容器内部へ供給される前記洗浄液の供給速度よりも速いことを特徴とする請求項1に記載の洗浄装置。
【請求項4】
前記供給ノズルは、断面形状が前記容器の断面形状と相似であることを特徴とする請求項1に記載の洗浄装置。
【請求項5】
前記供給ノズルによる前記洗浄液の供給前に、前記容器内部に保持されている液体を吸引する吸引ノズルを備え、
前記吸引ノズルは、前記供給ノズルの内部に配置されることを特徴とする請求項1に記載の洗浄装置。
【請求項6】
請求項1〜5の何れか一つに記載の洗浄装置を備えることを特徴とする自動分析装置。
【図1】


【図2】
【図3−1】
【図3−2】
【図4】
【図5】
【図6−1】
【図6−2】
【図7】
【図8】
【図9】
【図10】
【図11−1】
【図11−2】
【図2】
【図3−1】
【図3−2】
【図4】
【図5】
【図6−1】
【図6−2】
【図7】
【図8】
【図9】
【図10】
【図11−1】
【図11−2】
【公開番号】特開2008−224539(P2008−224539A)
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願番号】特願2007−65582(P2007−65582)
【出願日】平成19年3月14日(2007.3.14)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願日】平成19年3月14日(2007.3.14)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]