
洗濯機
【課題】モータのみの損失最小化だけでなく、モータ駆動における動作領域での洗濯機全体での損失を最小化した洗濯機を提供すること。
【解決手段】衣類を収納するドラム3と、ドラム3を駆動するモータ12と、モータ12とドラム3を特定の減速比で減速させる減速機構部6と、モータ12を制御する制御部13とを備え、制御部13は、モータ損失を算出する第1損失算出部201と、減速機構部6の減速損失を算出する第2損失算出部202と、制御部13の駆動部132が損失する駆動損失を算出する第3損失算出部203とを備え、制御部13は、ドラム3に加わる動作領域の負荷条件で、第1損失算出部201および第2損失算出部202および第3損失算出部203の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整することで、洗濯機全体の損失を最小化することができる。
【解決手段】衣類を収納するドラム3と、ドラム3を駆動するモータ12と、モータ12とドラム3を特定の減速比で減速させる減速機構部6と、モータ12を制御する制御部13とを備え、制御部13は、モータ損失を算出する第1損失算出部201と、減速機構部6の減速損失を算出する第2損失算出部202と、制御部13の駆動部132が損失する駆動損失を算出する第3損失算出部203とを備え、制御部13は、ドラム3に加わる動作領域の負荷条件で、第1損失算出部201および第2損失算出部202および第3損失算出部203の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整することで、洗濯機全体の損失を最小化することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は洗濯工程から脱水工程および乾燥工程において、モータ駆動における損失をモータおよび制御部、減速機構部の損失を考慮したモータ駆動電流制御を行う洗濯機に関する。
【背景技術】
【0002】
従来の洗濯機は、モータの駆動電流を制御してモータの回転制御おこない、トルクを制御するq軸電流と、磁束制御するd軸電流とからモータの負荷条件に応じて、最大効率になるように制御を行う。その際の損失となる鉄損と銅損の合計を最小化することが最大効率となるため、駆動電流の周波数に影響する鉄損と、駆動電流の電流値に影響する銅損とをそれぞれ算出し、その合計を最小化することでモータの効率は最大となる。
【0003】
高速回転でモータを駆動する際、d軸電流を最小化することで銅損は最小化できるが、鉄損は最大となり、高速回転時における銅損と鉄損の合計値を考えた場合には、必ずしもd軸電流を最小化することが損失最小化とはならない。従って、d軸電流を流すことによって、鉄損を小さくし、銅損との合計値を最小化することが弱め界磁制御として一般的に用いられている(例えば、特許文献1参照)。
【0004】
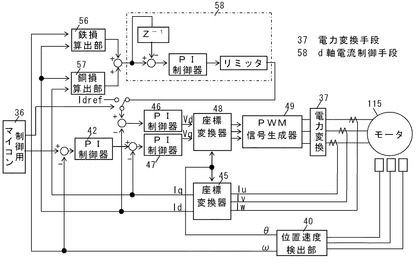
図6は、従来の洗濯機のモータ制御装置のブロック図である。図6に示すように、モータ115を駆動するために、制御マイコン36から回転数ωとd軸電流値の指令を行う。その指令値に基ついて、駆動されたモータ115への電流値から銅損算出部57および鉄損算出部56で算出した銅損Pcおよび鉄損Piの合成値を最小化するためのd軸電流をd軸電流制御手段58で算出し、座標変換48でモータ駆動信号に変換し、最小損失でのモータ駆動を行っている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−236948号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の構成では、洗濯機にモータを搭載した際には、駆動回路における制御回路損失が含まれ、ほぼモータ電流に依存する損失があるが、この損失は考慮されていない。さらにドラム式洗濯機では最も多く採用されているベルト駆動方式のモータでは、内部に減速機構を備え、回転数に依存して減速機構損失が発生する。従って、モータの銅損および鉄損のみではなく、それらも含めた損失を考慮する必要がある。
【0007】
制御回路損失および減速機構損失は、モータ電流と回転数に依存するため、d軸電流とq軸電流の調整により大きく影響する。鉄損を軽減するためにd軸電流を大きくするが、そのために銅損が増加し、さらに制御回路損失が増加する。さらには、電流に関係なく回転数に依存する減速機構損失も含まれるため、d軸電流の調整をこれらの損失合計値から最適に行うことが、洗濯機全体の損失軽減に必要である。
【0008】
従って、モータの銅損と鉄損の合計値からのみ損失の最小値を求めることが洗濯機として損失を最小にする条件とは限らないという課題があった。
【0009】
本発明は、前記従来の課題を解決するもので、モータの銅損および鉄損とモータ駆動を
行う電力変換部やPWM信号生成部を含むモータ制御回路での電流値依存の制御回路損失とを合計した損失の最小化を行うことが可能であり、さらには減速機構を搭載した洗濯機では回転数依存の減速機構損をも含めた合計損失の最小化を算出し、洗濯機としての損失最小化を行うことができるドラム式洗濯機を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記従来の課題を解決するために、本発明の洗濯機は、衣類を収納するドラムと、前記ドラムを駆動するモータと、前記モータと前記ドラムを特定の減速比で減速させる減速機構部と、前記モータを制御する制御部とを備え、前記制御部は、前記モータ損失を算出する第1損失算出部と、前記減速機構部の減速損失を算出する第2損失算出部と、前記制御部の駆動部が損失する駆動損失を算出する第3損失算出部とを備え、前記制御部は、前記ドラムに加わる動作領域の負荷条件で、前記第1損失算出部および前記第2損失算出部および前記第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整するものである。
【0011】
これによって、モータの損失である銅損および鉄損を算出するだけでなく、モータを制御する制御部の制御損失および減速機構部の減速機構損失をそれぞれ算出し、その合計値が最小となるd軸電流値とq軸電流値となるように制御を行うことができる。よって、モータのみの損失最小化だけでなく、モータ駆動における動作領域での洗濯機全体での損失を最小化した状態で動作を行うことができる。
【発明の効果】
【0012】
本発明の洗濯機は、洗濯機のドラム回転数が動作領域全般で最小損失として動作することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態1におけるドラム式洗濯機の構成図
【図2】本発明の実施の形態1におけるドラム式洗濯機の制御ブロック図
【図3】本発明の実施の形態1におけるドラム式洗濯機の減速機構部の回転数と損失を示す減速機構部損失特性図
【図4】本発明の実施の形態1におけるドラム式洗濯機の駆動部の流れる電流と損失を示す駆動部損失特性図
【図5】本発明の実施の形態1におけるドラム式洗濯機の磁化電流(Id)による各部損失を示す損失特性図
【図6】従来のドラム式洗濯機のモータ制御装置のブロック図
【発明を実施するための形態】
【0014】
第1の発明の洗濯機は、衣類を収納するドラムと、前記ドラムを駆動するモータと、前記モータと前記ドラムを特定の減速比で減速させる減速機構部と、前記モータを制御する制御部とを備え、前記制御部は、前記モータ損失を算出する第1損失算出部と、前記減速機構部の減速損失を算出する第2損失算出部と、前記制御部の駆動部が損失する駆動損失を算出する第3損失算出部とを備え、前記制御部は、前記ドラムに加わる動作領域の負荷条件で、前記第1損失算出部および前記第2損失算出部および前記第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整することにより、制御部が、ドラムに加わる動作領域の負荷条件で、第1損失算出部と第2損失算出部および第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流からなるモータ電流を調整することとなり、洗濯機の動作時の電力を最小化することができる。
【0015】
第2の発明は、特に、第1の発明の洗濯機の第2損失算出部は、減速機構部の減速損失を回転数に応じた損失の一次比例定数として保持する減速損失定数部を有し、
制御部が、ドラムの回転数に応じて前記減速損失定数部から損失値を選定する請求項1に記載の減速機構を備えたものである。これにより、制御部が、ドラムの回転数に応じて減速損失定数部から損失値を選定することとなり、回転数に応じた最適な損失値を算出することができ、損失の最小化を行うことができる。
【0016】
第3の発明は、特に、第1の発明の洗濯機の第3損失算出部は、駆動部の駆動損失をd軸電流とq軸電流の合成値に応じた損失の二次比例定数として保持する駆動損失定数部を有し、制御部が、d軸電流とq軸電流からなる電流値に応じて前記駆動損失定数部から損失値を選定するものである。これによって、制御部が、d軸電流とq軸電流の合成値に応じて駆動損失定数部から損失値を選定することとなり、電流値に応じて駆動損失の算出を正確に行うことができ、損失の最小化を行うことができる。
【0017】
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、この実施の形態によって本発明が限定されるものではない。
【0018】
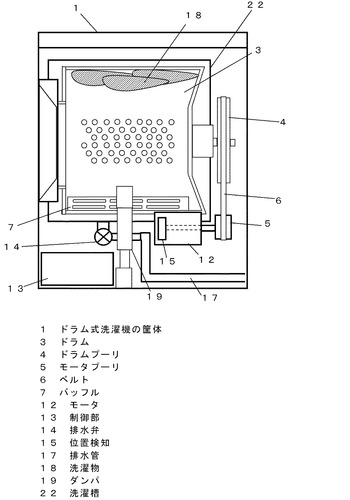
(実施の形態1)
図1は、本発明の実施の形態1におけるドラム式洗濯機1の構成図である。図1において、ドラム式洗濯機1は、洗濯物18を収納するドラム3と、そのドラム3を内部に収納する洗濯槽22と、その洗濯槽22を支えるダンパ19とを備えている。モータ12は、ベルト6を介してドラム3の同一軸に設けたドラムプーリ4にモータ12の駆動を伝達することで、ドラム3を回転させる構成としている。
【0019】
さらに、モータ12はロータ位置を検出する位置検出部15を設け、制御部13がモータ12のロータ位置を検出して制御をおこない、ドラム3の回転は、位置検出部15とベルト6によるドラムプーリ4とモータプーリ5の減速比から算出する構成としている。
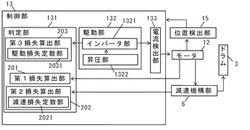
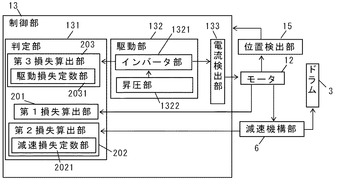
また、図2は、本発明の実施の形態1におけるドラム式洗濯機の制御ブロック図である。図2に示すように、ドラム式洗濯機1は、ドラム式洗濯機1の駆動制御を行う制御部13と、ドラム3を回転させるモータ12と、モータ12のロータ位置を検出する位置検出部15と、モータ12の動力(トルクおよび回転)をドラム3に伝達する減速機構部6を備えている。
【0020】
次に、制御部13は、判定部131と、モータ12を駆動する駆動部132と、駆動する際にモータ12に流れる電流を検出する電流検出部133とを有している。判定部131は、モータ12の損失である銅損および鉄損を算出する第1損失算出部201と、減速機構部6の損失を算出する第2損失算出部202と、駆動部132で発生する損失を算出する第3損失算出部203とを備えている。
【0021】
駆動部132は、モータ12に印加する電圧を、インバータ部1321を用いて波形を成形して印加し、そのもととなる電源が不足しないように洗濯機の入力電源の電圧を昇圧して、駆動部132の電源にする昇圧部1322とから構成されている。
【0022】
第2損失算出部202は、減速機構部6の構成によりドラム3の回転数に応じて一次比例として発生する損失をあらかじめ実験値で求めておき、回転数と損失のデータを保持する減速損失定数部2021を設けている。第2損失算出部202は、ドラム3の回転数に応じて減速損失定数部2021から損失値を選定する。
【0023】
第3損失算出部203は、駆動部132のインバータ部1321の種類に応じて、すなわち、d軸電流とq軸電流の合成値に応じて、損失が二次比例となるデータを保持する駆動損失定数部2031を設けている。第3損失算出部203は、d軸電流とq軸電流からなる電流値に応じて駆動損失定数部2031から損失値を選定する。
【0024】
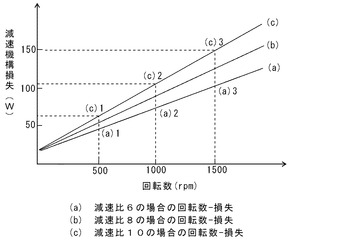
図3は、本発明の実施の形態1におけるドラム式洗濯機の減速機構部の回転数と損失を示す減速機構部損失特性図である。図3は、減速機構部6がドラム3の回転数によって発生する損失を示す回転数‐減速損失図を示すものである。図3において、横軸がドラム3の回転数(rpm)を示し、縦軸を減速機構部6の減速機構損失(W)を示している。減速比を変更することでドラム3の回転数に対してモータ12の回転数が変わるため、モータプーリ5およびドラムプーリ4とベルト6の接触および屈曲性が変化して損失が変わるため、ここでは例えば減速比6の損失(a)、減速比8の損失(b)、減速比10の損失(c)として示している。
【0025】
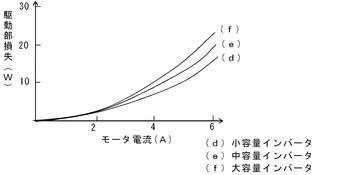
また、図4は、本発明の実施の形態1におけるドラム式洗濯機の駆動部の流れる電流と損失を示す駆動部損失特性図である。図4は、駆動部132がモータ12を駆動する際に流れる電流により、インバータ部1321で発生する損失および昇圧部1322で派生する損失を示している。図4において、横軸がモータ12に流れる電流(A)を示し、縦軸は駆動部132で発生する駆動部損失(W)を示している。インバータ部1321および昇圧部1322の種類、容量により、駆動部損失が変わるため、ここでは例えば小容量インバータ(d)、中容量インバータ(e)、大容量インバータ(f)の損失例を示している。
【0026】
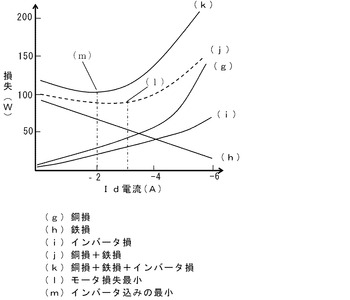
また、図5は、本発明の実施の形態1におけるドラム式洗濯機の磁化電流(Id)による各部損失を示す損失特性図である。図5は、モータ12への磁化電流Idを横軸にし、縦軸に損失を示している。図5の(g)はモータの銅損、(h)はモータの鉄損、(i)はインバータ損、(j)はモータ12の銅損および鉄損の合成値、(k)はモータ12の銅損および鉄損およびインバータ損の合成値を示している。
【0027】
以上のように構成されたドラム式洗濯機について、以下にその動作、作用を説明する。
【0028】
まず、ドラム式洗濯機1が洗濯物18をドラム3内に収納し、洗濯から脱水までの工程を行う場合において、洗濯工程ではドラム3の回転数を約35〜55rpmでの低速回転で回転させ、洗濯物18をバッフル7でドラム3内を持ち上げ、落下させることで、洗濯物18の汚れを落としている。その際、制御部13は、駆動部132を制御し、モータ12を回転動作させ、減速機構部6(モータプーリ5とドラムプーリ4の大きさにより減速比が決まる)で回転数を減速させ、ドラム3を所定の回転数で動作させる。
【0029】
また、脱水工程では、約1000〜1600rpmなど高速にドラム3を回転させることで、洗濯物18に含まれた水分を除去する動作を行う。その際に、モータ12は高速に駆動されるため、モータ12内の永久磁石による誘導電圧が発生するが、その誘起電圧を抑制することで高速回転での安定動作が行われる。その際、モータ12へは磁化電流Idをマイナス方向に流し、弱め界磁を行う。この結果、鉄損も抑制することとなるが、磁化電流Idは弱め界磁として動作するため、モータ電流を増加させるため銅損および駆動部132の損失を増加させることとなる。
【0030】
一般的にモータの銅損は、モータの巻線抵抗(R1)による損失のため、式(1)に示すように、抵抗とモータ電流(I)の二乗の積に比例した損失が発生する。
【0031】
銅損 ∝ I2*R1 (1)
また、モータの鉄損は、モータのコア等に発生する渦電流損が主であり、式(2)に示すように、周波数(f)の二乗に比例した損失が発生する。
【0032】
渦電流損 ∝ k1*(t*f*Bm)2/ρ (2)
また、減速機構損失は、モータ回転数(ω)に比例して損失が増加するため、式(3)に示すように、ドラム回転数に比例する。
【0033】
減速機構損失 ∝ k2*ω (3)
また、インバータ部損失は、回路に流れる電流による損失のため、式(4)に示すように、回路抵抗(R2)とモータへの電流(Im)の二乗の積に比例した損失が発生する。
【0034】
インバータ損 ∝ Im2*R2 (4)
ここで、k1およびk2は定数、tはコア板厚、Bmは磁束密度、ρは磁性体の抵抗率である。また、モータ電流Iは、磁化電流Idとトルク電流Iqから合成された値としており、I=√(Id2+Iq2)で示される。
【0035】
次にドラム3を駆動するために、モータ12を駆動部132内の昇圧部1322が電源電圧からインバータ部1321の駆動電圧を変換するために電圧を昇圧し、モータ12の駆動に必要な電圧まで上昇させる。その上昇した電圧を駆動部132がインバータ部1321を制御してモータ12に三相の制御電圧として電圧を印加する。そしてモータ12に流れる電流値を電流検出部133で検出し、モータ回転数は位置検出部15(例えばホールセンサ)で検出し、モータ12を駆動するために必要なトルクおよび回転数に応じてトルク電流Iqおよび磁化電流Idを決定することでモータ12を制御する。
【0036】
この時、モータ12を制御する際、損失を最小化するためにトルク電流Iqおよび磁化電流Idを決定する際、1周期前の電流値から第1損失算出部201が、モータ12の銅損および鉄損を算出し、同時にその電流値から第3損失算出部203が、内部に保持している駆動損失定数部2031のモータ電流値−損失データから駆動部132で発生する損失値を求める。さらに、第2損失算出部202が、例えば図4に示す減速機構部6による損失値を減速損失定数部2021に保持し、ドラム回転数−損失データからドラム3の回転数に応じて減速機構部6で発生する損失値を求める。判定部131は、第1損失算出部201+第2損失算出部202+第3損失算出部203の損失の合計値から、ドラム回転数における損失最小となる条件の磁化電流Idおよびトルク電流Iqを決定する。
【0037】
この時、図3に示すように減速損失定数部2021では、あらかじめ減速機構部6の減速比によって減速損失特性が異なるため、搭載している減速機構の減速比に応じた定数を保持している。例えば減速比6の場合は、(a)に示すように500rpmでは(a)1の損失、1000rpmでは(a)2の損失、1500rpmでは(a)3の損失が発生することになり、第2損失算出部202はドラム3の回転数に応じて損失値を減速損失定数部2021から算出する。
【0038】
また、図3に示すように減速機構損失は回転数に一次比例するため、第2損失算出部202は、必要回転数での損失が、減速比6であれば、(a)、減速比8であれば(b)、減速比10であれば(c)のように決定され、実験値として減速損失定数部2021に保持されていることから必要回転数での損失値を算出することは可能である。従って、1000rpmでは、減速比が6では(a)2、減速比10では(c)2の損失として算出する。
【0039】
また、図4に示すように駆動損失はモータ電流に二次比例するため、例えば中容量インバータを使用した場合、図4の(e)の損失特性をあらかじめ駆動損失定数部2031に保持し、第3損失算出部203が電流検出部133で検出したモータ電流値でのインバータ部1321での損失を図4の(e)から決定することで損失値を算出できる。制御部13が搭載している駆動部の容量が大容量インバータの場合は(f)、小容量インバータの場合は(d)の損失特性を得るため、あらかじめ搭載した容量のインバータの損失特性を
駆動損失定数部2031に保持しておくことで第3損失算出部203は駆動部132の損失を決定できる。
【0040】
図5に示すように、第1損失算出部201および第3損失算出部203の損失からドラム式洗濯機1のモータ12および駆動部132の損失および合成損失となる。
例えば、脱水工程でドラム3を高速回転させる場合には、磁化電流Idをマイナス方向に流し、弱め界磁することで鉄損(h)は、減少する。しかし、モータ電流は、磁化電流増加により増加するため銅損(g)は二次比例で増加する。同様にインバータ損(i)も二次比例で増加するため、モータ12の損失である銅損および鉄損の合計のみで最小損失を考える場合、図5の(j)に示すように損失最小点(l)の電流値となる。しかし、インバータ損(i)を含めて最小損失を算出する場合、図5の(k)に示すように損失最小点(m)の電流値となる。
【0041】
従って、駆動部132を含む損失を考慮した場合とモータ12のみの損失で考慮した場合では、モータ12を制御する磁化電流Idの値が異なる。さらに減速機構部6の回転数による損失も含めた洗濯機全体の損失の場合、図5の(k)に示す損失特性に、さらにドラム3の任意の回転数による減速機構損失(例えば図3)が加算されるため、さらに最小損失点(m)が変化することになる。
【0042】
また、モータ12の鉄損は、ドラム3の回転周波数が大きくなることで増加するが、磁化電流Idによる弱め界磁を行うことでも減少する。このため、ドラム3の回転数および磁化電流Idが変化することで、鉄損の変化および電流による銅損および駆動部損の変化および回転数による減速機構損の変化が発生するため、あらかじめモータ12の制御周期の1周期前のモータ電流値から第1損失算出部201および第2損失算出部202、第3損失算出部203の合計値から損失を算出し、最小損失となる磁化電流Idおよびトルク電流Iqを決定することにより、ドラム式洗濯機1の損失を最小にすることができる。
以上、本発明の実施の形態1について説明したが、本発明はこの実施の形態1に限定されるものではない。
【0043】
例えば、ここでは、駆動部132内の昇圧部1322の損失も含めて説明しているが、電洗濯機の源電圧がAC200V以上などで昇圧部1322が必要のない場合は、インバータ部1321の損失を考慮する第3損失算出部203としてよく、ここでは駆動部132内のインバータ部1321としているが、交流を直流に変換(コンバータ)し、モータ駆動電圧である直流から交流への変換(インバータ)も含まれた構成での損失を考慮していても作用、効果は同じである。
【0044】
また、モータ12はここでは永久磁石同期モータを使用していることを説明したが、誘導モータを用いて、インバータ制御を行う場合であっても同じである。
【0045】
ここでは、ドラム式洗濯機について説明したが、ドラム式洗濯乾燥機および縦型洗濯機であってもインバータ式駆動のモータを搭載している場合やベルト駆動式の場合でも同じであるため、同様の作用、効果がある。
【産業上の利用可能性】
【0046】
本発明にかかるドラム式洗濯機は、洗濯および脱水でドラムを駆動する際に発生するモータおよび駆動部および減速機構部のそれぞれが発生する損失を算出し、その合計が最小となる条件で動作させることで、洗濯機全体の損失を最小化でき、省エネ性の向上を行うものであり、家庭用および業務用ドラム式洗濯機やドラム式洗濯乾燥機にも有用である。
【符号の説明】
【0047】
1 ドラム式洗濯機
3 ドラム
4 ドラムプーリ
5 モータプーリ
6 ベルト(減速機構部)
7 バッフル
12 モータ
13 制御部
131 判定部
132 駆動部
1321 インバータ部
1322 昇圧部
133 電流検出部
14 排水弁
15 位置検出部
17 排水管
18 洗濯物
19 ダンパ
22 洗濯槽
201 第1損失算出部
202 第2損失算出部
2021 減速損失定数部
203 第3損失算出部
2031 駆動損失定数部
【技術分野】
【0001】
本発明は洗濯工程から脱水工程および乾燥工程において、モータ駆動における損失をモータおよび制御部、減速機構部の損失を考慮したモータ駆動電流制御を行う洗濯機に関する。
【背景技術】
【0002】
従来の洗濯機は、モータの駆動電流を制御してモータの回転制御おこない、トルクを制御するq軸電流と、磁束制御するd軸電流とからモータの負荷条件に応じて、最大効率になるように制御を行う。その際の損失となる鉄損と銅損の合計を最小化することが最大効率となるため、駆動電流の周波数に影響する鉄損と、駆動電流の電流値に影響する銅損とをそれぞれ算出し、その合計を最小化することでモータの効率は最大となる。
【0003】
高速回転でモータを駆動する際、d軸電流を最小化することで銅損は最小化できるが、鉄損は最大となり、高速回転時における銅損と鉄損の合計値を考えた場合には、必ずしもd軸電流を最小化することが損失最小化とはならない。従って、d軸電流を流すことによって、鉄損を小さくし、銅損との合計値を最小化することが弱め界磁制御として一般的に用いられている(例えば、特許文献1参照)。
【0004】
図6は、従来の洗濯機のモータ制御装置のブロック図である。図6に示すように、モータ115を駆動するために、制御マイコン36から回転数ωとd軸電流値の指令を行う。その指令値に基ついて、駆動されたモータ115への電流値から銅損算出部57および鉄損算出部56で算出した銅損Pcおよび鉄損Piの合成値を最小化するためのd軸電流をd軸電流制御手段58で算出し、座標変換48でモータ駆動信号に変換し、最小損失でのモータ駆動を行っている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−236948号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の構成では、洗濯機にモータを搭載した際には、駆動回路における制御回路損失が含まれ、ほぼモータ電流に依存する損失があるが、この損失は考慮されていない。さらにドラム式洗濯機では最も多く採用されているベルト駆動方式のモータでは、内部に減速機構を備え、回転数に依存して減速機構損失が発生する。従って、モータの銅損および鉄損のみではなく、それらも含めた損失を考慮する必要がある。
【0007】
制御回路損失および減速機構損失は、モータ電流と回転数に依存するため、d軸電流とq軸電流の調整により大きく影響する。鉄損を軽減するためにd軸電流を大きくするが、そのために銅損が増加し、さらに制御回路損失が増加する。さらには、電流に関係なく回転数に依存する減速機構損失も含まれるため、d軸電流の調整をこれらの損失合計値から最適に行うことが、洗濯機全体の損失軽減に必要である。
【0008】
従って、モータの銅損と鉄損の合計値からのみ損失の最小値を求めることが洗濯機として損失を最小にする条件とは限らないという課題があった。
【0009】
本発明は、前記従来の課題を解決するもので、モータの銅損および鉄損とモータ駆動を
行う電力変換部やPWM信号生成部を含むモータ制御回路での電流値依存の制御回路損失とを合計した損失の最小化を行うことが可能であり、さらには減速機構を搭載した洗濯機では回転数依存の減速機構損をも含めた合計損失の最小化を算出し、洗濯機としての損失最小化を行うことができるドラム式洗濯機を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記従来の課題を解決するために、本発明の洗濯機は、衣類を収納するドラムと、前記ドラムを駆動するモータと、前記モータと前記ドラムを特定の減速比で減速させる減速機構部と、前記モータを制御する制御部とを備え、前記制御部は、前記モータ損失を算出する第1損失算出部と、前記減速機構部の減速損失を算出する第2損失算出部と、前記制御部の駆動部が損失する駆動損失を算出する第3損失算出部とを備え、前記制御部は、前記ドラムに加わる動作領域の負荷条件で、前記第1損失算出部および前記第2損失算出部および前記第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整するものである。
【0011】
これによって、モータの損失である銅損および鉄損を算出するだけでなく、モータを制御する制御部の制御損失および減速機構部の減速機構損失をそれぞれ算出し、その合計値が最小となるd軸電流値とq軸電流値となるように制御を行うことができる。よって、モータのみの損失最小化だけでなく、モータ駆動における動作領域での洗濯機全体での損失を最小化した状態で動作を行うことができる。
【発明の効果】
【0012】
本発明の洗濯機は、洗濯機のドラム回転数が動作領域全般で最小損失として動作することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態1におけるドラム式洗濯機の構成図
【図2】本発明の実施の形態1におけるドラム式洗濯機の制御ブロック図
【図3】本発明の実施の形態1におけるドラム式洗濯機の減速機構部の回転数と損失を示す減速機構部損失特性図
【図4】本発明の実施の形態1におけるドラム式洗濯機の駆動部の流れる電流と損失を示す駆動部損失特性図
【図5】本発明の実施の形態1におけるドラム式洗濯機の磁化電流(Id)による各部損失を示す損失特性図
【図6】従来のドラム式洗濯機のモータ制御装置のブロック図
【発明を実施するための形態】
【0014】
第1の発明の洗濯機は、衣類を収納するドラムと、前記ドラムを駆動するモータと、前記モータと前記ドラムを特定の減速比で減速させる減速機構部と、前記モータを制御する制御部とを備え、前記制御部は、前記モータ損失を算出する第1損失算出部と、前記減速機構部の減速損失を算出する第2損失算出部と、前記制御部の駆動部が損失する駆動損失を算出する第3損失算出部とを備え、前記制御部は、前記ドラムに加わる動作領域の負荷条件で、前記第1損失算出部および前記第2損失算出部および前記第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整することにより、制御部が、ドラムに加わる動作領域の負荷条件で、第1損失算出部と第2損失算出部および第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流からなるモータ電流を調整することとなり、洗濯機の動作時の電力を最小化することができる。
【0015】
第2の発明は、特に、第1の発明の洗濯機の第2損失算出部は、減速機構部の減速損失を回転数に応じた損失の一次比例定数として保持する減速損失定数部を有し、
制御部が、ドラムの回転数に応じて前記減速損失定数部から損失値を選定する請求項1に記載の減速機構を備えたものである。これにより、制御部が、ドラムの回転数に応じて減速損失定数部から損失値を選定することとなり、回転数に応じた最適な損失値を算出することができ、損失の最小化を行うことができる。
【0016】
第3の発明は、特に、第1の発明の洗濯機の第3損失算出部は、駆動部の駆動損失をd軸電流とq軸電流の合成値に応じた損失の二次比例定数として保持する駆動損失定数部を有し、制御部が、d軸電流とq軸電流からなる電流値に応じて前記駆動損失定数部から損失値を選定するものである。これによって、制御部が、d軸電流とq軸電流の合成値に応じて駆動損失定数部から損失値を選定することとなり、電流値に応じて駆動損失の算出を正確に行うことができ、損失の最小化を行うことができる。
【0017】
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、この実施の形態によって本発明が限定されるものではない。
【0018】
(実施の形態1)
図1は、本発明の実施の形態1におけるドラム式洗濯機1の構成図である。図1において、ドラム式洗濯機1は、洗濯物18を収納するドラム3と、そのドラム3を内部に収納する洗濯槽22と、その洗濯槽22を支えるダンパ19とを備えている。モータ12は、ベルト6を介してドラム3の同一軸に設けたドラムプーリ4にモータ12の駆動を伝達することで、ドラム3を回転させる構成としている。
【0019】
さらに、モータ12はロータ位置を検出する位置検出部15を設け、制御部13がモータ12のロータ位置を検出して制御をおこない、ドラム3の回転は、位置検出部15とベルト6によるドラムプーリ4とモータプーリ5の減速比から算出する構成としている。
また、図2は、本発明の実施の形態1におけるドラム式洗濯機の制御ブロック図である。図2に示すように、ドラム式洗濯機1は、ドラム式洗濯機1の駆動制御を行う制御部13と、ドラム3を回転させるモータ12と、モータ12のロータ位置を検出する位置検出部15と、モータ12の動力(トルクおよび回転)をドラム3に伝達する減速機構部6を備えている。
【0020】
次に、制御部13は、判定部131と、モータ12を駆動する駆動部132と、駆動する際にモータ12に流れる電流を検出する電流検出部133とを有している。判定部131は、モータ12の損失である銅損および鉄損を算出する第1損失算出部201と、減速機構部6の損失を算出する第2損失算出部202と、駆動部132で発生する損失を算出する第3損失算出部203とを備えている。
【0021】
駆動部132は、モータ12に印加する電圧を、インバータ部1321を用いて波形を成形して印加し、そのもととなる電源が不足しないように洗濯機の入力電源の電圧を昇圧して、駆動部132の電源にする昇圧部1322とから構成されている。
【0022】
第2損失算出部202は、減速機構部6の構成によりドラム3の回転数に応じて一次比例として発生する損失をあらかじめ実験値で求めておき、回転数と損失のデータを保持する減速損失定数部2021を設けている。第2損失算出部202は、ドラム3の回転数に応じて減速損失定数部2021から損失値を選定する。
【0023】
第3損失算出部203は、駆動部132のインバータ部1321の種類に応じて、すなわち、d軸電流とq軸電流の合成値に応じて、損失が二次比例となるデータを保持する駆動損失定数部2031を設けている。第3損失算出部203は、d軸電流とq軸電流からなる電流値に応じて駆動損失定数部2031から損失値を選定する。
【0024】
図3は、本発明の実施の形態1におけるドラム式洗濯機の減速機構部の回転数と損失を示す減速機構部損失特性図である。図3は、減速機構部6がドラム3の回転数によって発生する損失を示す回転数‐減速損失図を示すものである。図3において、横軸がドラム3の回転数(rpm)を示し、縦軸を減速機構部6の減速機構損失(W)を示している。減速比を変更することでドラム3の回転数に対してモータ12の回転数が変わるため、モータプーリ5およびドラムプーリ4とベルト6の接触および屈曲性が変化して損失が変わるため、ここでは例えば減速比6の損失(a)、減速比8の損失(b)、減速比10の損失(c)として示している。
【0025】
また、図4は、本発明の実施の形態1におけるドラム式洗濯機の駆動部の流れる電流と損失を示す駆動部損失特性図である。図4は、駆動部132がモータ12を駆動する際に流れる電流により、インバータ部1321で発生する損失および昇圧部1322で派生する損失を示している。図4において、横軸がモータ12に流れる電流(A)を示し、縦軸は駆動部132で発生する駆動部損失(W)を示している。インバータ部1321および昇圧部1322の種類、容量により、駆動部損失が変わるため、ここでは例えば小容量インバータ(d)、中容量インバータ(e)、大容量インバータ(f)の損失例を示している。
【0026】
また、図5は、本発明の実施の形態1におけるドラム式洗濯機の磁化電流(Id)による各部損失を示す損失特性図である。図5は、モータ12への磁化電流Idを横軸にし、縦軸に損失を示している。図5の(g)はモータの銅損、(h)はモータの鉄損、(i)はインバータ損、(j)はモータ12の銅損および鉄損の合成値、(k)はモータ12の銅損および鉄損およびインバータ損の合成値を示している。
【0027】
以上のように構成されたドラム式洗濯機について、以下にその動作、作用を説明する。
【0028】
まず、ドラム式洗濯機1が洗濯物18をドラム3内に収納し、洗濯から脱水までの工程を行う場合において、洗濯工程ではドラム3の回転数を約35〜55rpmでの低速回転で回転させ、洗濯物18をバッフル7でドラム3内を持ち上げ、落下させることで、洗濯物18の汚れを落としている。その際、制御部13は、駆動部132を制御し、モータ12を回転動作させ、減速機構部6(モータプーリ5とドラムプーリ4の大きさにより減速比が決まる)で回転数を減速させ、ドラム3を所定の回転数で動作させる。
【0029】
また、脱水工程では、約1000〜1600rpmなど高速にドラム3を回転させることで、洗濯物18に含まれた水分を除去する動作を行う。その際に、モータ12は高速に駆動されるため、モータ12内の永久磁石による誘導電圧が発生するが、その誘起電圧を抑制することで高速回転での安定動作が行われる。その際、モータ12へは磁化電流Idをマイナス方向に流し、弱め界磁を行う。この結果、鉄損も抑制することとなるが、磁化電流Idは弱め界磁として動作するため、モータ電流を増加させるため銅損および駆動部132の損失を増加させることとなる。
【0030】
一般的にモータの銅損は、モータの巻線抵抗(R1)による損失のため、式(1)に示すように、抵抗とモータ電流(I)の二乗の積に比例した損失が発生する。
【0031】
銅損 ∝ I2*R1 (1)
また、モータの鉄損は、モータのコア等に発生する渦電流損が主であり、式(2)に示すように、周波数(f)の二乗に比例した損失が発生する。
【0032】
渦電流損 ∝ k1*(t*f*Bm)2/ρ (2)
また、減速機構損失は、モータ回転数(ω)に比例して損失が増加するため、式(3)に示すように、ドラム回転数に比例する。
【0033】
減速機構損失 ∝ k2*ω (3)
また、インバータ部損失は、回路に流れる電流による損失のため、式(4)に示すように、回路抵抗(R2)とモータへの電流(Im)の二乗の積に比例した損失が発生する。
【0034】
インバータ損 ∝ Im2*R2 (4)
ここで、k1およびk2は定数、tはコア板厚、Bmは磁束密度、ρは磁性体の抵抗率である。また、モータ電流Iは、磁化電流Idとトルク電流Iqから合成された値としており、I=√(Id2+Iq2)で示される。
【0035】
次にドラム3を駆動するために、モータ12を駆動部132内の昇圧部1322が電源電圧からインバータ部1321の駆動電圧を変換するために電圧を昇圧し、モータ12の駆動に必要な電圧まで上昇させる。その上昇した電圧を駆動部132がインバータ部1321を制御してモータ12に三相の制御電圧として電圧を印加する。そしてモータ12に流れる電流値を電流検出部133で検出し、モータ回転数は位置検出部15(例えばホールセンサ)で検出し、モータ12を駆動するために必要なトルクおよび回転数に応じてトルク電流Iqおよび磁化電流Idを決定することでモータ12を制御する。
【0036】
この時、モータ12を制御する際、損失を最小化するためにトルク電流Iqおよび磁化電流Idを決定する際、1周期前の電流値から第1損失算出部201が、モータ12の銅損および鉄損を算出し、同時にその電流値から第3損失算出部203が、内部に保持している駆動損失定数部2031のモータ電流値−損失データから駆動部132で発生する損失値を求める。さらに、第2損失算出部202が、例えば図4に示す減速機構部6による損失値を減速損失定数部2021に保持し、ドラム回転数−損失データからドラム3の回転数に応じて減速機構部6で発生する損失値を求める。判定部131は、第1損失算出部201+第2損失算出部202+第3損失算出部203の損失の合計値から、ドラム回転数における損失最小となる条件の磁化電流Idおよびトルク電流Iqを決定する。
【0037】
この時、図3に示すように減速損失定数部2021では、あらかじめ減速機構部6の減速比によって減速損失特性が異なるため、搭載している減速機構の減速比に応じた定数を保持している。例えば減速比6の場合は、(a)に示すように500rpmでは(a)1の損失、1000rpmでは(a)2の損失、1500rpmでは(a)3の損失が発生することになり、第2損失算出部202はドラム3の回転数に応じて損失値を減速損失定数部2021から算出する。
【0038】
また、図3に示すように減速機構損失は回転数に一次比例するため、第2損失算出部202は、必要回転数での損失が、減速比6であれば、(a)、減速比8であれば(b)、減速比10であれば(c)のように決定され、実験値として減速損失定数部2021に保持されていることから必要回転数での損失値を算出することは可能である。従って、1000rpmでは、減速比が6では(a)2、減速比10では(c)2の損失として算出する。
【0039】
また、図4に示すように駆動損失はモータ電流に二次比例するため、例えば中容量インバータを使用した場合、図4の(e)の損失特性をあらかじめ駆動損失定数部2031に保持し、第3損失算出部203が電流検出部133で検出したモータ電流値でのインバータ部1321での損失を図4の(e)から決定することで損失値を算出できる。制御部13が搭載している駆動部の容量が大容量インバータの場合は(f)、小容量インバータの場合は(d)の損失特性を得るため、あらかじめ搭載した容量のインバータの損失特性を
駆動損失定数部2031に保持しておくことで第3損失算出部203は駆動部132の損失を決定できる。
【0040】
図5に示すように、第1損失算出部201および第3損失算出部203の損失からドラム式洗濯機1のモータ12および駆動部132の損失および合成損失となる。
例えば、脱水工程でドラム3を高速回転させる場合には、磁化電流Idをマイナス方向に流し、弱め界磁することで鉄損(h)は、減少する。しかし、モータ電流は、磁化電流増加により増加するため銅損(g)は二次比例で増加する。同様にインバータ損(i)も二次比例で増加するため、モータ12の損失である銅損および鉄損の合計のみで最小損失を考える場合、図5の(j)に示すように損失最小点(l)の電流値となる。しかし、インバータ損(i)を含めて最小損失を算出する場合、図5の(k)に示すように損失最小点(m)の電流値となる。
【0041】
従って、駆動部132を含む損失を考慮した場合とモータ12のみの損失で考慮した場合では、モータ12を制御する磁化電流Idの値が異なる。さらに減速機構部6の回転数による損失も含めた洗濯機全体の損失の場合、図5の(k)に示す損失特性に、さらにドラム3の任意の回転数による減速機構損失(例えば図3)が加算されるため、さらに最小損失点(m)が変化することになる。
【0042】
また、モータ12の鉄損は、ドラム3の回転周波数が大きくなることで増加するが、磁化電流Idによる弱め界磁を行うことでも減少する。このため、ドラム3の回転数および磁化電流Idが変化することで、鉄損の変化および電流による銅損および駆動部損の変化および回転数による減速機構損の変化が発生するため、あらかじめモータ12の制御周期の1周期前のモータ電流値から第1損失算出部201および第2損失算出部202、第3損失算出部203の合計値から損失を算出し、最小損失となる磁化電流Idおよびトルク電流Iqを決定することにより、ドラム式洗濯機1の損失を最小にすることができる。
以上、本発明の実施の形態1について説明したが、本発明はこの実施の形態1に限定されるものではない。
【0043】
例えば、ここでは、駆動部132内の昇圧部1322の損失も含めて説明しているが、電洗濯機の源電圧がAC200V以上などで昇圧部1322が必要のない場合は、インバータ部1321の損失を考慮する第3損失算出部203としてよく、ここでは駆動部132内のインバータ部1321としているが、交流を直流に変換(コンバータ)し、モータ駆動電圧である直流から交流への変換(インバータ)も含まれた構成での損失を考慮していても作用、効果は同じである。
【0044】
また、モータ12はここでは永久磁石同期モータを使用していることを説明したが、誘導モータを用いて、インバータ制御を行う場合であっても同じである。
【0045】
ここでは、ドラム式洗濯機について説明したが、ドラム式洗濯乾燥機および縦型洗濯機であってもインバータ式駆動のモータを搭載している場合やベルト駆動式の場合でも同じであるため、同様の作用、効果がある。
【産業上の利用可能性】
【0046】
本発明にかかるドラム式洗濯機は、洗濯および脱水でドラムを駆動する際に発生するモータおよび駆動部および減速機構部のそれぞれが発生する損失を算出し、その合計が最小となる条件で動作させることで、洗濯機全体の損失を最小化でき、省エネ性の向上を行うものであり、家庭用および業務用ドラム式洗濯機やドラム式洗濯乾燥機にも有用である。
【符号の説明】
【0047】
1 ドラム式洗濯機
3 ドラム
4 ドラムプーリ
5 モータプーリ
6 ベルト(減速機構部)
7 バッフル
12 モータ
13 制御部
131 判定部
132 駆動部
1321 インバータ部
1322 昇圧部
133 電流検出部
14 排水弁
15 位置検出部
17 排水管
18 洗濯物
19 ダンパ
22 洗濯槽
201 第1損失算出部
202 第2損失算出部
2021 減速損失定数部
203 第3損失算出部
2031 駆動損失定数部
【特許請求の範囲】
【請求項1】
衣類を収納するドラムと、
前記ドラムを駆動するモータと、
前記モータと前記ドラムを特定の減速比で減速させる減速機構部と、
前記モータを制御する制御部とを備え、
前記制御部は、
前記モータ損失を算出する第1損失算出部と、
前記減速機構部の減速損失を算出する第2損失算出部と、
前記制御部の駆動部が損失する駆動損失を算出する第3損失算出部とを備え、
前記制御部は、前記ドラムに加わる動作領域の負荷条件で、前記第1損失算出部および前記第2損失算出部および前記第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整する洗濯機。
【請求項2】
第2損失算出部は、減速機構部の減速損失を回転数に応じた損失の一次比例定数として保持する減速損失定数部を有し、
制御部が、ドラムの回転数に応じて前記減速損失定数部から損失値を選定する請求項1に記載の減速機構を備えた洗濯機。
【請求項3】
第3損失算出部は、駆動部の駆動損失をd軸電流とq軸電流の合成値に応じた損失の二次比例定数として保持する駆動損失定数部を有し、
制御部が、d軸電流とq軸電流からなる電流値に応じて前記駆動損失定数部から損失値を選定する請求項1に記載の減速機構を備えた洗濯機。
【請求項1】
衣類を収納するドラムと、
前記ドラムを駆動するモータと、
前記モータと前記ドラムを特定の減速比で減速させる減速機構部と、
前記モータを制御する制御部とを備え、
前記制御部は、
前記モータ損失を算出する第1損失算出部と、
前記減速機構部の減速損失を算出する第2損失算出部と、
前記制御部の駆動部が損失する駆動損失を算出する第3損失算出部とを備え、
前記制御部は、前記ドラムに加わる動作領域の負荷条件で、前記第1損失算出部および前記第2損失算出部および前記第3損失算出部の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整する洗濯機。
【請求項2】
第2損失算出部は、減速機構部の減速損失を回転数に応じた損失の一次比例定数として保持する減速損失定数部を有し、
制御部が、ドラムの回転数に応じて前記減速損失定数部から損失値を選定する請求項1に記載の減速機構を備えた洗濯機。
【請求項3】
第3損失算出部は、駆動部の駆動損失をd軸電流とq軸電流の合成値に応じた損失の二次比例定数として保持する駆動損失定数部を有し、
制御部が、d軸電流とq軸電流からなる電流値に応じて前記駆動損失定数部から損失値を選定する請求項1に記載の減速機構を備えた洗濯機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−85797(P2013−85797A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230488(P2011−230488)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]