
洗車機
【課題】 本発明は、ブラシモータの電流値によりブラシの接離を制御する洗車機に、ブラシを当接部材に接触させる凍結防止措置を採用できるようにした洗車機を提供することを目的とするものである。
【解決手段】 ブラシモータ15,25の電流値によりブラシ5・6の接離を制御する洗車機において、洗車ブラシ5・6が車体以外に接触する可能性がある位置でブラシモータ15,25を回転させたときの電流値から第1電流閾値を設定するとともに、洗浄ブラシが車体以外に接触する可能性がない位置でブラシモータ15,25を回転させたときの電流値から第2電流閾値を設定し、洗車ブラシ5・6の移動位置に応じて車体との接触を判断する基準閾値を切り替えるようにしたものである。
【解決手段】 ブラシモータ15,25の電流値によりブラシ5・6の接離を制御する洗車機において、洗車ブラシ5・6が車体以外に接触する可能性がある位置でブラシモータ15,25を回転させたときの電流値から第1電流閾値を設定するとともに、洗浄ブラシが車体以外に接触する可能性がない位置でブラシモータ15,25を回転させたときの電流値から第2電流閾値を設定し、洗車ブラシ5・6の移動位置に応じて車体との接触を判断する基準閾値を切り替えるようにしたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、洗車ブラシで自動車車体をブラッシング洗浄する際に、車体との接触度合いをブラシモータの電流値により監視するようにした洗車機に関するものである。
【背景技術】
【0002】
このような洗車機では、洗車ブラシを回転駆動するブラシモータの電流値が設定された上限電流閾値と下限電流閾値との間に保持されるように、ブラシを車体に接離させる制御を行っている。電流閾値は、ブラシモータの個体差や経年変化等に対応するため、洗車開始前に調整され、洗車ブラシを空転させたときの空転電流値に基づいて設定されている。(例えば、特許文献1)
【0003】
ところで、昨今の洗車機は、あらゆるタイプの車両が洗車できるように、洗車可能な車両サイズを拡張する傾向にある。このため、洗車可能範囲ぎりぎりの車両を洗浄する際には、洗車ブラシが待機位置の近くで回転することになり、ブラシ毛が洗車機内板や特許文献2に示す水切り用のパイプ状当接部材に接触してしまうことがあった。
【0004】
ブラシが車体以外に接触してしまうと、ブラシ電流値の上昇が、車体との接触によるものか車体以外との接触によるものかが判断できず、ブラシの接離を制御することができないという問題があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−6936号公報
【特許文献2】実用新案登録第2521892号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで本発明は、ブラシモータの電流値によりブラシの接離を制御する洗車機において、ブラシと車体との接触を確実に判断することができるようにすることを目的とするものである。
【課題を解決するための手段】
【0007】
このような課題を解決するため本発明は、ブラシモータの電流値によりブラシの接離を制御する洗車機において、洗車ブラシが車体以外に接触する可能性がある位置でブラシモータを回転させたときの電流値から第1電流閾値を設定するとともに、洗浄ブラシが車体以外に接触する可能性がない位置でブラシモータを回転させたときの電流値から第2電流閾値を設定し、洗車ブラシの移動位置に応じて車体との接触を判断する基準閾値を切り替えてブラシ移動手段を制御するようにしたものである。
【発明の効果】
【0008】
本発明は以上のように構成され、ブラシと車体との接触状態を判断するための基準値をブラシ位置や車体洗浄位置に応じて切り替えるようにしたので、ブラシと車体との接触を確実に判断することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の洗車機を示す正面図である。
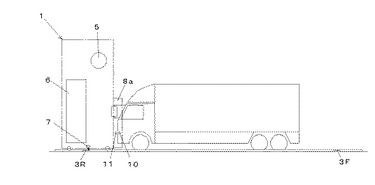
【図2】同装置の側面図である。
【図3】上面洗浄ブラシ5の構造を示す説明図である。
【図4】側面洗浄ブラシ6・6の構造を示す説明図である。
【図5】同装置の制御系を示すブロック図である。
【図6】閾値設定動作を示すフローチャート図である。
【図7】上面洗浄ブラシ5の制御データを示す説明図である。
【図8】上面洗浄ブラシ5の位置による電流変化を示したグラフである。
【図9】車体部位毎の電流変化を示したグラフである。
【図10】上面洗浄ブラシ5の動作を示す説明図である。
【発明を実施するための最良の形態】
【0010】
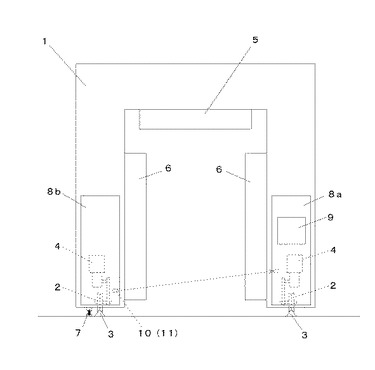
以下、図面を基に、本発明の実施態様について説明する。図1は本発明の洗車機を示す正面図、図2は同側面図である。
1は本体フレームで、自動車車体を跨ぐように門型状に形成され、正転逆転可能な走行モータ4・4により、車輪2・2を回転駆動してレール3・3に沿って往復走行する。5は上面洗浄ブラシで、本体フレーム1の脚部に備えた昇降レール間に沿って昇降し、主に自動車の上面をブラッシングする。6・6は側面洗浄ブラシで、本体フレーム1の上部幅方向に備えた走行レールに沿って開閉し、主に自動車の前後面及び側面をブラッシングする。7は走行限界スイッチで、本体フレーム1の脚部下端に設けられ、前記レール3の前端及び後端付近に設置したドッグ3R・3Fに接触して本体フレーム1の前進及び後進の限界位置を検出する。ここでは、走行限界スイッチ7がドッグ3Rに接触すると走行後端位置が検出され、ドッグ3Fに接触すると走行前端位置が検出されるものである。
【0011】
8a・8bは電装ボックスで、本体フレーム1の脚部前面に左右一対で取り付けられ、正面視右側に位置する電装ボックス8a・8bの前面に洗車受付を行う操作パネル9を設けている。10・11は光電スイッチで、それぞれ発光部と受光部とを対面配置するとともに、受光部を発光部よりも高い位置に配置することで傾斜した光軸を形成し、この傾斜光軸の透光/遮光によって車体の有無を検出するもので、電装ボックス8a・8bの対向する内面において奥行き方向に所定距離離れた位置に設置されている。
【0012】
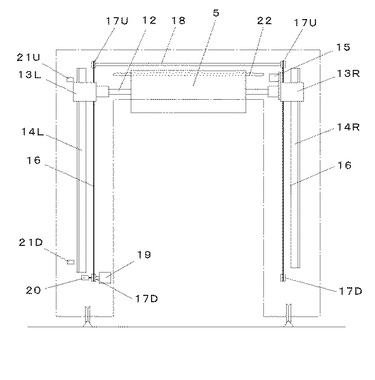
図3は上面洗浄ブラシ5の構造を示す説明図である。
上面洗浄ブラシ5は、ブラシ軸12の両端に直結されたキャリア13L・13Rによって洗車機本体1内に垂設した昇降レール14L・14R上を昇降するように構成され、一方のキャリア13Rに固定されたブラシモータ15により正逆転駆動される。キャリア13L・13Rは、上端と下端を無端状に接続するチェーン16と、該チェーン16が懸回されるスプロケット17U・17Dと、左右の上スプロケット17U同士を連結する回転軸18と、該回転軸18を正逆転する昇降モータ19と、該昇降モータ19に連結される昇降エンコーダ20とからなる昇降装置により昇降される。21U,21Dは昇降限界スイッチで、キャリア13Lの接触によりスイッチングして上面洗浄ブラシ5が上昇限界位置及び下降限界位置にあることを検出する。22はパイプ状当接部材で、上面洗浄ブラシ5が昇降限界スイッチ21Uで検出される上限位置(待機位置)で回転したときに、上面洗浄ブラシ5のブラシ毛が接触するように本体フレーム1に取り付けられている。
【0013】
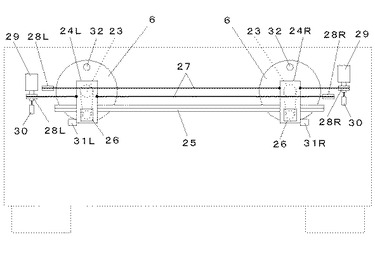
図4は側面洗浄ブラシ6の構造を示す説明図である。
側面洗浄ブラシ6は、ブラシ軸23の上端に直結したキャリア24L・24Rによって洗車機本体1内の後方上部に水平に横架された開閉レール25に沿って開閉するように構成され、ブラシモータ26・26により正逆転駆動される。キャリア24L・24Rは、右端と左端を無端状に接続するチェーン27と、該チェーン27が懸回されるスプロケット28L・28Rと、一方のスプロケット28L・28Rを正逆転する開閉モータ29と、該開閉モータ29に連結される開閉エンコーダ30とからなる開閉装置により開閉される。31L・31Rは開放スイッチで、キャリア24L・24Rの接触によりスイッチングして側面洗浄ブラシ6・6が開放位置にあることを検出する。32はパイプ状当接部材で、側面洗浄ブラシ6・6が開放スイッチ31L・31Rで検出される開放位置(待機位置)で回転したときに、側面洗浄ブラシ6・6のブラシ毛が接触するように本体フレーム1に取り付けられている。
【0014】
このような構成の洗車機は、主にトラックやバス等の大型車の洗車に用いられる。本体フレーム1を待機位置に待機させた状態で、洗浄する自動車を光電スイッチ10・11で与える停止位置まで入車させ、操作パネル9で任意の洗車プログラムを選択した後にスタートすると、本体フレーム1が前進し、各散水ノズルから洗浄水を散布しながら各洗浄ブラシ5・6・6により車体のブラッシング洗浄が施される。洗車終了後は、上面洗浄ブラシ5が上限位置、側面洗浄ブラシ6・6が開放位置に待機状態となり、この待機位置でブラシを回転させることでそれぞれパイプ状当接部材22,32にブラシ毛が接触し、ブラシの水切り及び解氷が行えるようになっている。
【0015】
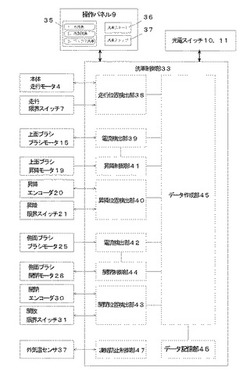
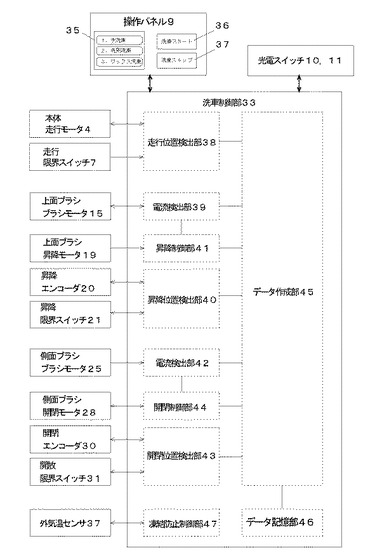
図5は本発明の制御系を示すブロック図である。
33は洗車制御部で、本体フレーム1の本体走行モータ4,走行限界スイッチ7,操作パネル9,光電スイッチ10・11,上面洗浄ブラシ5のブラシモータ15,昇降モータ19,昇降エンコーダ20,昇降限界スイッチ21U・21D,側面洗浄ブラシ6・6のブラシモータ26,開閉モータ29,開閉エンコーダ30,開放スイッチ31L・31R、外気温センサ34が接続されている。操作パネル9には、洗車コースキー35,洗車スタートキー36,洗車ストップキー37が備えられ、顧客の希望に添った洗車形態が設定できるようになっている。
【0016】
洗車制御部33は、本体フレーム1の走行位置を検出する走行位置検出部38と、上面洗浄ブラシモータ15の電流値を検出する電流検出部39と、上面洗浄ブラシ5の昇降位置を検出する昇降位置検出部40と、昇降モータ19を制御する昇降制御部41と、側面洗浄ブラシモータ25の電流値を検出する電流検出部42と、側面洗浄ブラシ6の開閉位置を検出する開閉位置検出部43と、開閉モータ29を制御する開閉制御部44と、昇降制御部41及び開閉制御部44の基準データを作成するデータ作成部45と、データ作成部45で作成した各種データを記憶するデータ記憶部46と、凍結防止制御部47を備えている。
【0017】
走行位置検出部38は、本体走行モータ4の駆動時間をカウントし、走行限界スイッチ7で検出される走行限界位置からの本体フレーム1の移動位置を推定して昇降制御部41,開閉制御部44及びデータ作成部45に出力する。
【0018】
上面洗浄ブラシの電流検出部39は、上面洗浄ブラシ5のブラシモータ15の電流値を検出し、昇降制御部41及びデータ作成部45に出力する。
昇降位置検出部40は、昇降エンコーダ20のパルス信号をカウントし、昇降限界スイッチ21U・21Dで検出される昇降限界位置からの上面洗浄ブラシ5の移動位置を検出して昇降制御部41及びデータ作成部45に出力する。
【0019】
昇降制御部41は、走行位置検出部38及び昇降位置検出部40から入力される本体フレーム1の走行位置及び上面洗浄ブラシ5の昇降位置に応じてデータ記憶部46から上限電流閾値AHiと下限電流閾値ALoを呼び出し、上面洗浄ブラシの電流検出部39から入力されるブラシモータ15の電流値Asが上限電流閾値AHi〜下限電流閾値ALoの間になるよう昇降モータ19を制御する。すなわち、検出電流値Asが上限電流閾値AHiよりも大きい場合(As>AHi)は、車体への接触圧が強いと判断してブラシを車体から離す方向に移動させ、検出電流値Asが下限電流閾値ALoよりも小さい場合(As<AHi)は、車体への接触が弱いと判断してブラシを車体に近づける方向に移動させるよう昇降モータ19を制御する。
【0020】
側面洗浄ブラシの電流検出部42は、側面洗浄ブラシ6・6のブラシモータ26の電流値を検出し、開閉制御部44及びデータ作成部45に出力する。開閉位置検出部43は、開閉エンコーダ30のパルス信号をカウントし、開放スイッチ31L・31Rで検出される開放位置からの側面洗浄ブラシ6・6の移動位置を検出して開閉制御部44及びデータ作成部45に出力する。
【0021】
開閉制御部44は、走行位置検出部38及び開閉位置検出部42から入力される本体フレーム1の走行位置及び側面洗浄ブラシ6・6の開閉位置に応じてデータ記憶部44から上限電流閾値AHiと下限電流閾値ALoを呼び出し、側面洗浄ブラシ電流検出部41から入力されるブラシモータ26の電流値Asが上限電流閾値AHi〜下限電流閾値ALoの間になるよう開閉モータ29を制御する。すなわち、検出電流値Asが上限電流閾値AHiよりも大きい場合(As>AHi)は、車体への接触圧が強いと判断してブラシを車体から離す方向に移動させ、検出電流値Asが下限電流閾値ALoよりも小さい場合(As<AHi)は、車体への接触が弱いと判断してブラシを車体に近づける方向に移動させるよう開閉モータ29を制御する。
【0022】
データ作成部45は、走行位置検出部38,電流検出部39・42,昇降位置検出部40,開閉位置検出部43からの入力に基づいて、ブラシと車体との接触状態を判断する上限電流閾値AHiと下限電流閾値ALoを設定する。データ記憶部46は、データ作成部45で作成した上限電流閾値AHiと下限電流閾値ALoが各洗浄ブラシの位置毎にテーブル化されて記憶される。
【0023】
このような構成により、上面洗浄ブラシ5及び側面洗浄ブラシ6でブラッシング洗浄を行う際に、データ記憶部46に記憶された上限電流閾値AHi〜下限電流閾値ALoの間になるように、上面洗浄ブラシ5を昇降、側面洗浄ブラシ6を開閉してブラッシング洗浄が実行されることになる。
【0024】
続いて、データ作成部45におけるデータ作成手順について説明する。
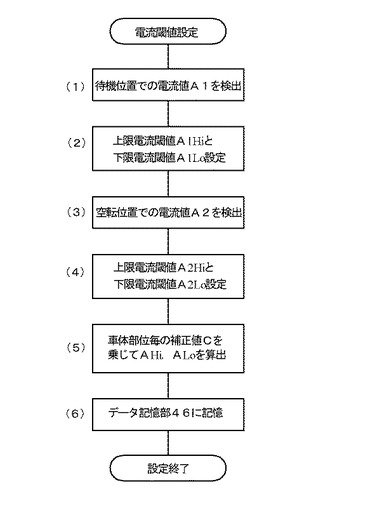
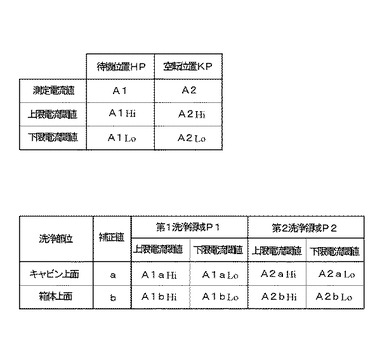
図6は電流閾値を設定する動作を示すフローチャート図、図7は作成される電流閾値データ表を示している。尚、この設定動作は、ブラシの経年劣化を考慮して洗車のたびに全てのブラシに対して実行されるものであるが、ここでは上面洗浄ブラシ5の設定動作を説明していく。
【0025】
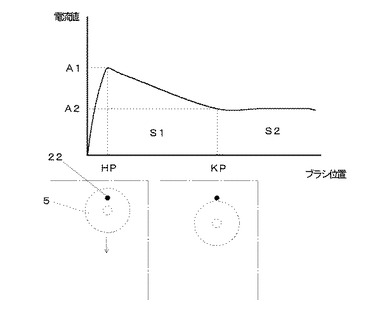
まず、上面洗浄ブラシ5を待機位置HP(パイプ状当接部材22にブラシ毛が接触する位置)で回転させて電流値A1を検出し(1)、検出した電流値A1に対して所定のオフセット値H,Lを加えて上限電流閾値A1Hi(=A1+H)と下限電流閾値A1Lo(=A1+L)を設定する(2)。次に、上面洗浄ブラシ5を空転位置KP(パイプ状当接部材22にブラシ毛が接触しない位置)に移動させ、その位置でブラシを回転させて電流値A2を検出し(3)、検出した電流値A2に対して所定のオフセット値H,Lを加えて上限電流閾値A2Hi(=A2+H)と下限電流閾値A2Lo(=A2+L)を設定する(4)。その後、洗浄する車体部位(ここではキャビン上面・箱体上面)毎に予め設定されている補正値a,bを乗じて、キャビン上面を洗浄する際の上限電流閾値A1aHi,A2aHiと、下限電流閾値A1aLo,A2aLo及び箱体上面を洗浄する際の上限電流閾値A1bHi,A2bHiと、下限電流閾値A1bLo,A2bLoを算出し(5)、データ記憶部46に記憶して(6)設定動作が終了となる。
【0026】
ここで、上記処理(1)・(2)で待機位置HPでの上限電流閾値と下限電流閾値を設定したのには次の理由がある。
すなわち、昨今の洗車事情として、あらゆるタイプの車両が洗車できるように、洗車可能な車両サイズを拡張する傾向にあるが、洗車機の基本サイズは変えられないため、洗車可能範囲ぎりぎりの車両を洗浄する際には、ブラシ毛が待機位置HPの当接部材22に接触してしまうことがあった。ブラシ5が当接部材22に接触すると、電流値が上昇するので、空転位置KPでのブラシ電流値を基に設定された上限電流閾値AHiと下限電流閾値ALoでは待機位置HP付近での車体との接触状態を正確に判断することができないという問題が生じていた。そのため、空転位置KPのブラシ電流値と、待機位置HPのブラシ電流値を検出し、それぞれに上限電流閾値AHiと下限電流閾値ALoを設定してデータ記憶部46に記憶しているのである。
【0027】
図8はブラシ位置による電流変化特性を示したグラフである。
図に示すように、待機位置HPではブラシ5が当接部材22に接触して電流値が上がり、ブラシ5が当接部材22から離れる方向に移動すると比例的に電流値が下がっていき、ブラシ5が空転位置KPで空転電流値となる。このため、エンコーダで検出されるブラシ5の移動位置が待機位置付近の第1洗浄領域S1にあるときは、待機位置HPのブラシ電流値A1に基づく上限電流閾値・下限電流閾値でブラシの移動を制御し、ブラシの移動位置が空転位置付近の第2洗浄領域S2にあるときは、空転位置KPのブラシ電流値A2に基づく上限電流閾値・下限電流閾値でブラシの移動を制御するのである。
【0028】
また、洗浄する車体部位毎に上限電流閾値と下限電流閾値を補正値Cで補正するのには次の理由がある。
すなわち、トラック型車両におけるキャビン部と箱部とでは幅寸法や高さ寸法が異なるため、ブラシとの接触面積に違いが生じる。加えて、キャビン部と箱部とでは強度そのものに違いがあるため、ブラシの接触圧を同じにすることはできない。そのため、車体部位毎に設定した補正値a・bで上限電流閾値と下限電流閾値を補正してデータ記憶部46に記憶しているのである。
【0029】
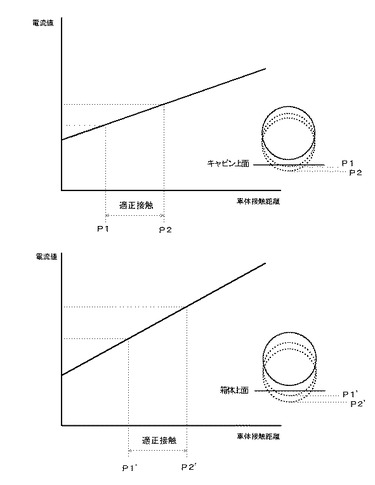
図9は車体部位毎の電流変化特性を示したグラフである。
図に示すように、キャビン上面を洗浄する際には、ブラシとの接触面積が小さく、ブラシの接触距離に対する電流上昇量が小さくなる。一方、箱体上面を洗浄する際には、ブラシとの接触面積が大きく、ブラシの接触距離に対する電流上昇量が大きくなる。また、キャビン上面に比べて箱体上面は丈夫であるため、ブラシの接触距離を箱体上面ではブラシをより接触させることができる。これにより、キャビン上面に対してはブラシを接触距離P1から接触距離P2まで接触させたときの電流変化率を補正値aとし、箱体上面に対してはブラシを接触距離P1’から接触距離P2’まで接触させたときの電流変化率を補正値bとしてデータ記憶部46に記憶している。
【0030】
こうして、ブラシ位置及び車体部位毎に上限閾値・下限閾値が設定され、図7に示すデータが与えられる。尚、図7では便宜上、全てのデータが異なる数値として表現しているが、同一の数値であっても構わない。
【0031】
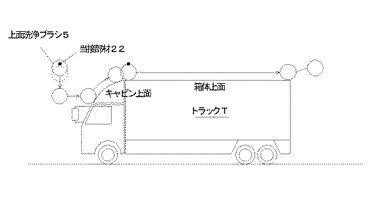
続いて、本発明の洗車機の洗車動作について、図10を用いて説明する。
本体フレーム1は、走行位置スイッチ7がドッグ3aに接触する待機位置で洗浄する車両の入車待ち状態にある。車両が乗り入れられて、本体フレーム1前面の電装ボックス8a,8b間に設けた光電スイッチ10・11のうち、前方の光電スイッチ10が遮光、後方の光電スイッチ11が透光している状態になると、車両の停止位置と判断して停止を促す。こうして、車両が正規の停止位置に停車されると、操作パネル9での洗車受付を許可し、各キーにて選択動作を行った後、洗車スタートキー34を入力すると洗車がスタートする。
【0032】
洗車がスタートすると、上記した電流閾値の設定動作を実行した後、まず上面洗浄ブラシ5をキャビン上面位置まで下降させ、ブラシ5を正転させながら本体フレーム1を前進させる。ブラシモータ15の電流値で上面洗浄ブラシ5がトラックTのキャビン上面に接触したことを検出すると、本体フレーム1を前進させたまま、昇降モータ19を制御してキャビン上面のブラッシング洗浄を行う。このとき、昇降位置検出部40で検出される上面洗浄ブラシ5の昇降位置が当接部材22に接触する第1洗浄領域S1にあるときは、図7に示す『キャビン上面−第1洗浄領域P1』の下限電流閾値A1aLo〜上限電流閾値A1aHiの範囲になるように昇降モータ19が制御され、第2洗浄領域S2にあるときは、『キャビン上面−第2洗浄領域P2』の下限電流閾値A2aLo〜上限電流閾値A2aHiの範囲になるように昇降モータ19が制御されることになる。ここでは、キャビン上面において上面洗浄ブラシ5は当接部材22に接触しない第2洗浄領域S2にあるので、下限電流閾値A2aLo〜上限電流閾値A2aHiの範囲になるように昇降モータ19が制御される。
【0033】
キャビン上面洗浄が終わると、引き続き昇降モータ19を制御して箱体上面のブラッシング洗浄を行う。このとき、昇降位置検出部40で検出される上面洗浄ブラシ5の昇降位置が当接部材22に接触する第1洗浄領域S1にあるときは、図7に示す『箱体上面−第1洗浄領域P1』の下限電流閾値A1bLo〜上限電流閾値A1bHiの範囲になるように昇降モータ19が制御され、第2洗浄領域S2にあるときは、『箱体上面−第2洗浄領域P2』の下限電流閾値A2bLo〜上限電流閾値A2bHiの範囲になるように昇降モータ19が制御されることになる。ここでは、箱体上面において上面洗浄ブラシ5は当接部材22に接触する第1洗浄領域S2にあるので、下限電流閾値A1bLo〜上限電流閾値A1bHiの範囲になるように昇降モータ19が制御される。
【0034】
本体フレーム1の前進により、上面洗浄ブラシ5が光電スイッチ11・12で検出するトラック後端に達したら、本体フレーム1を前進させたままブラシ5を上昇させ、ブラシ5が上限位置に達したら、本体フレーム1の走行を停止させて洗車終了となる。尚、ここで設定されるキャビンと箱体の境界位置は、一般的なトラック形状に基づいて予め記憶されており、各走行モータ4・昇降モータ19の駆動時間により位置制御されるものである。
【0035】
本発明は以上のように構成されるもので、ブラシと車体との接触状態を判断するための基準値を、ブラシ位置や車体洗浄位置に応じて切り替えるようにしたので、ブラシの凍結防止措置として当接部材を設け、この当接部材に接触する状態で車体洗浄が行われる状況があっても適正なブラシ圧でブラシを車体に作用させることができるのである。このような構成は、トラックを洗浄する大型洗車機のみならず、軽自動車から大型車まで洗車可能にした一般的な門型洗車機にも有効に採用できる。また、説明は省略したが、側面洗浄ブラシやロッカーブラシでも同様に利用できるものである。
【符号の説明】
【0036】
1 本体フレーム
4 走行モータ
5 上面洗浄ブラシ
6・6 側面洗浄ブラシ
9 操作パネル
15 ブラシモータ
19 昇降モータ
20 昇降エンコーダ
25 ブラシモータ
28 開閉モータ
30 開閉エンコーダ
33 洗車制御部
34 外気温センサ
38 走行位置検出部
39 電流検出部(上面洗浄ブラシ)
40 昇降位置検出部
41 昇降制御部
42 電流検出部(側面洗浄ブラシ)
43 開閉位置検出部
44 開閉制御部
45 データ作成部
46 データ記憶部
47 凍結防止制御部
【技術分野】
【0001】
本発明は、洗車ブラシで自動車車体をブラッシング洗浄する際に、車体との接触度合いをブラシモータの電流値により監視するようにした洗車機に関するものである。
【背景技術】
【0002】
このような洗車機では、洗車ブラシを回転駆動するブラシモータの電流値が設定された上限電流閾値と下限電流閾値との間に保持されるように、ブラシを車体に接離させる制御を行っている。電流閾値は、ブラシモータの個体差や経年変化等に対応するため、洗車開始前に調整され、洗車ブラシを空転させたときの空転電流値に基づいて設定されている。(例えば、特許文献1)
【0003】
ところで、昨今の洗車機は、あらゆるタイプの車両が洗車できるように、洗車可能な車両サイズを拡張する傾向にある。このため、洗車可能範囲ぎりぎりの車両を洗浄する際には、洗車ブラシが待機位置の近くで回転することになり、ブラシ毛が洗車機内板や特許文献2に示す水切り用のパイプ状当接部材に接触してしまうことがあった。
【0004】
ブラシが車体以外に接触してしまうと、ブラシ電流値の上昇が、車体との接触によるものか車体以外との接触によるものかが判断できず、ブラシの接離を制御することができないという問題があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−6936号公報
【特許文献2】実用新案登録第2521892号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで本発明は、ブラシモータの電流値によりブラシの接離を制御する洗車機において、ブラシと車体との接触を確実に判断することができるようにすることを目的とするものである。
【課題を解決するための手段】
【0007】
このような課題を解決するため本発明は、ブラシモータの電流値によりブラシの接離を制御する洗車機において、洗車ブラシが車体以外に接触する可能性がある位置でブラシモータを回転させたときの電流値から第1電流閾値を設定するとともに、洗浄ブラシが車体以外に接触する可能性がない位置でブラシモータを回転させたときの電流値から第2電流閾値を設定し、洗車ブラシの移動位置に応じて車体との接触を判断する基準閾値を切り替えてブラシ移動手段を制御するようにしたものである。
【発明の効果】
【0008】
本発明は以上のように構成され、ブラシと車体との接触状態を判断するための基準値をブラシ位置や車体洗浄位置に応じて切り替えるようにしたので、ブラシと車体との接触を確実に判断することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の洗車機を示す正面図である。
【図2】同装置の側面図である。
【図3】上面洗浄ブラシ5の構造を示す説明図である。
【図4】側面洗浄ブラシ6・6の構造を示す説明図である。
【図5】同装置の制御系を示すブロック図である。
【図6】閾値設定動作を示すフローチャート図である。
【図7】上面洗浄ブラシ5の制御データを示す説明図である。
【図8】上面洗浄ブラシ5の位置による電流変化を示したグラフである。
【図9】車体部位毎の電流変化を示したグラフである。
【図10】上面洗浄ブラシ5の動作を示す説明図である。
【発明を実施するための最良の形態】
【0010】
以下、図面を基に、本発明の実施態様について説明する。図1は本発明の洗車機を示す正面図、図2は同側面図である。
1は本体フレームで、自動車車体を跨ぐように門型状に形成され、正転逆転可能な走行モータ4・4により、車輪2・2を回転駆動してレール3・3に沿って往復走行する。5は上面洗浄ブラシで、本体フレーム1の脚部に備えた昇降レール間に沿って昇降し、主に自動車の上面をブラッシングする。6・6は側面洗浄ブラシで、本体フレーム1の上部幅方向に備えた走行レールに沿って開閉し、主に自動車の前後面及び側面をブラッシングする。7は走行限界スイッチで、本体フレーム1の脚部下端に設けられ、前記レール3の前端及び後端付近に設置したドッグ3R・3Fに接触して本体フレーム1の前進及び後進の限界位置を検出する。ここでは、走行限界スイッチ7がドッグ3Rに接触すると走行後端位置が検出され、ドッグ3Fに接触すると走行前端位置が検出されるものである。
【0011】
8a・8bは電装ボックスで、本体フレーム1の脚部前面に左右一対で取り付けられ、正面視右側に位置する電装ボックス8a・8bの前面に洗車受付を行う操作パネル9を設けている。10・11は光電スイッチで、それぞれ発光部と受光部とを対面配置するとともに、受光部を発光部よりも高い位置に配置することで傾斜した光軸を形成し、この傾斜光軸の透光/遮光によって車体の有無を検出するもので、電装ボックス8a・8bの対向する内面において奥行き方向に所定距離離れた位置に設置されている。
【0012】
図3は上面洗浄ブラシ5の構造を示す説明図である。
上面洗浄ブラシ5は、ブラシ軸12の両端に直結されたキャリア13L・13Rによって洗車機本体1内に垂設した昇降レール14L・14R上を昇降するように構成され、一方のキャリア13Rに固定されたブラシモータ15により正逆転駆動される。キャリア13L・13Rは、上端と下端を無端状に接続するチェーン16と、該チェーン16が懸回されるスプロケット17U・17Dと、左右の上スプロケット17U同士を連結する回転軸18と、該回転軸18を正逆転する昇降モータ19と、該昇降モータ19に連結される昇降エンコーダ20とからなる昇降装置により昇降される。21U,21Dは昇降限界スイッチで、キャリア13Lの接触によりスイッチングして上面洗浄ブラシ5が上昇限界位置及び下降限界位置にあることを検出する。22はパイプ状当接部材で、上面洗浄ブラシ5が昇降限界スイッチ21Uで検出される上限位置(待機位置)で回転したときに、上面洗浄ブラシ5のブラシ毛が接触するように本体フレーム1に取り付けられている。
【0013】
図4は側面洗浄ブラシ6の構造を示す説明図である。
側面洗浄ブラシ6は、ブラシ軸23の上端に直結したキャリア24L・24Rによって洗車機本体1内の後方上部に水平に横架された開閉レール25に沿って開閉するように構成され、ブラシモータ26・26により正逆転駆動される。キャリア24L・24Rは、右端と左端を無端状に接続するチェーン27と、該チェーン27が懸回されるスプロケット28L・28Rと、一方のスプロケット28L・28Rを正逆転する開閉モータ29と、該開閉モータ29に連結される開閉エンコーダ30とからなる開閉装置により開閉される。31L・31Rは開放スイッチで、キャリア24L・24Rの接触によりスイッチングして側面洗浄ブラシ6・6が開放位置にあることを検出する。32はパイプ状当接部材で、側面洗浄ブラシ6・6が開放スイッチ31L・31Rで検出される開放位置(待機位置)で回転したときに、側面洗浄ブラシ6・6のブラシ毛が接触するように本体フレーム1に取り付けられている。
【0014】
このような構成の洗車機は、主にトラックやバス等の大型車の洗車に用いられる。本体フレーム1を待機位置に待機させた状態で、洗浄する自動車を光電スイッチ10・11で与える停止位置まで入車させ、操作パネル9で任意の洗車プログラムを選択した後にスタートすると、本体フレーム1が前進し、各散水ノズルから洗浄水を散布しながら各洗浄ブラシ5・6・6により車体のブラッシング洗浄が施される。洗車終了後は、上面洗浄ブラシ5が上限位置、側面洗浄ブラシ6・6が開放位置に待機状態となり、この待機位置でブラシを回転させることでそれぞれパイプ状当接部材22,32にブラシ毛が接触し、ブラシの水切り及び解氷が行えるようになっている。
【0015】
図5は本発明の制御系を示すブロック図である。
33は洗車制御部で、本体フレーム1の本体走行モータ4,走行限界スイッチ7,操作パネル9,光電スイッチ10・11,上面洗浄ブラシ5のブラシモータ15,昇降モータ19,昇降エンコーダ20,昇降限界スイッチ21U・21D,側面洗浄ブラシ6・6のブラシモータ26,開閉モータ29,開閉エンコーダ30,開放スイッチ31L・31R、外気温センサ34が接続されている。操作パネル9には、洗車コースキー35,洗車スタートキー36,洗車ストップキー37が備えられ、顧客の希望に添った洗車形態が設定できるようになっている。
【0016】
洗車制御部33は、本体フレーム1の走行位置を検出する走行位置検出部38と、上面洗浄ブラシモータ15の電流値を検出する電流検出部39と、上面洗浄ブラシ5の昇降位置を検出する昇降位置検出部40と、昇降モータ19を制御する昇降制御部41と、側面洗浄ブラシモータ25の電流値を検出する電流検出部42と、側面洗浄ブラシ6の開閉位置を検出する開閉位置検出部43と、開閉モータ29を制御する開閉制御部44と、昇降制御部41及び開閉制御部44の基準データを作成するデータ作成部45と、データ作成部45で作成した各種データを記憶するデータ記憶部46と、凍結防止制御部47を備えている。
【0017】
走行位置検出部38は、本体走行モータ4の駆動時間をカウントし、走行限界スイッチ7で検出される走行限界位置からの本体フレーム1の移動位置を推定して昇降制御部41,開閉制御部44及びデータ作成部45に出力する。
【0018】
上面洗浄ブラシの電流検出部39は、上面洗浄ブラシ5のブラシモータ15の電流値を検出し、昇降制御部41及びデータ作成部45に出力する。
昇降位置検出部40は、昇降エンコーダ20のパルス信号をカウントし、昇降限界スイッチ21U・21Dで検出される昇降限界位置からの上面洗浄ブラシ5の移動位置を検出して昇降制御部41及びデータ作成部45に出力する。
【0019】
昇降制御部41は、走行位置検出部38及び昇降位置検出部40から入力される本体フレーム1の走行位置及び上面洗浄ブラシ5の昇降位置に応じてデータ記憶部46から上限電流閾値AHiと下限電流閾値ALoを呼び出し、上面洗浄ブラシの電流検出部39から入力されるブラシモータ15の電流値Asが上限電流閾値AHi〜下限電流閾値ALoの間になるよう昇降モータ19を制御する。すなわち、検出電流値Asが上限電流閾値AHiよりも大きい場合(As>AHi)は、車体への接触圧が強いと判断してブラシを車体から離す方向に移動させ、検出電流値Asが下限電流閾値ALoよりも小さい場合(As<AHi)は、車体への接触が弱いと判断してブラシを車体に近づける方向に移動させるよう昇降モータ19を制御する。
【0020】
側面洗浄ブラシの電流検出部42は、側面洗浄ブラシ6・6のブラシモータ26の電流値を検出し、開閉制御部44及びデータ作成部45に出力する。開閉位置検出部43は、開閉エンコーダ30のパルス信号をカウントし、開放スイッチ31L・31Rで検出される開放位置からの側面洗浄ブラシ6・6の移動位置を検出して開閉制御部44及びデータ作成部45に出力する。
【0021】
開閉制御部44は、走行位置検出部38及び開閉位置検出部42から入力される本体フレーム1の走行位置及び側面洗浄ブラシ6・6の開閉位置に応じてデータ記憶部44から上限電流閾値AHiと下限電流閾値ALoを呼び出し、側面洗浄ブラシ電流検出部41から入力されるブラシモータ26の電流値Asが上限電流閾値AHi〜下限電流閾値ALoの間になるよう開閉モータ29を制御する。すなわち、検出電流値Asが上限電流閾値AHiよりも大きい場合(As>AHi)は、車体への接触圧が強いと判断してブラシを車体から離す方向に移動させ、検出電流値Asが下限電流閾値ALoよりも小さい場合(As<AHi)は、車体への接触が弱いと判断してブラシを車体に近づける方向に移動させるよう開閉モータ29を制御する。
【0022】
データ作成部45は、走行位置検出部38,電流検出部39・42,昇降位置検出部40,開閉位置検出部43からの入力に基づいて、ブラシと車体との接触状態を判断する上限電流閾値AHiと下限電流閾値ALoを設定する。データ記憶部46は、データ作成部45で作成した上限電流閾値AHiと下限電流閾値ALoが各洗浄ブラシの位置毎にテーブル化されて記憶される。
【0023】
このような構成により、上面洗浄ブラシ5及び側面洗浄ブラシ6でブラッシング洗浄を行う際に、データ記憶部46に記憶された上限電流閾値AHi〜下限電流閾値ALoの間になるように、上面洗浄ブラシ5を昇降、側面洗浄ブラシ6を開閉してブラッシング洗浄が実行されることになる。
【0024】
続いて、データ作成部45におけるデータ作成手順について説明する。
図6は電流閾値を設定する動作を示すフローチャート図、図7は作成される電流閾値データ表を示している。尚、この設定動作は、ブラシの経年劣化を考慮して洗車のたびに全てのブラシに対して実行されるものであるが、ここでは上面洗浄ブラシ5の設定動作を説明していく。
【0025】
まず、上面洗浄ブラシ5を待機位置HP(パイプ状当接部材22にブラシ毛が接触する位置)で回転させて電流値A1を検出し(1)、検出した電流値A1に対して所定のオフセット値H,Lを加えて上限電流閾値A1Hi(=A1+H)と下限電流閾値A1Lo(=A1+L)を設定する(2)。次に、上面洗浄ブラシ5を空転位置KP(パイプ状当接部材22にブラシ毛が接触しない位置)に移動させ、その位置でブラシを回転させて電流値A2を検出し(3)、検出した電流値A2に対して所定のオフセット値H,Lを加えて上限電流閾値A2Hi(=A2+H)と下限電流閾値A2Lo(=A2+L)を設定する(4)。その後、洗浄する車体部位(ここではキャビン上面・箱体上面)毎に予め設定されている補正値a,bを乗じて、キャビン上面を洗浄する際の上限電流閾値A1aHi,A2aHiと、下限電流閾値A1aLo,A2aLo及び箱体上面を洗浄する際の上限電流閾値A1bHi,A2bHiと、下限電流閾値A1bLo,A2bLoを算出し(5)、データ記憶部46に記憶して(6)設定動作が終了となる。
【0026】
ここで、上記処理(1)・(2)で待機位置HPでの上限電流閾値と下限電流閾値を設定したのには次の理由がある。
すなわち、昨今の洗車事情として、あらゆるタイプの車両が洗車できるように、洗車可能な車両サイズを拡張する傾向にあるが、洗車機の基本サイズは変えられないため、洗車可能範囲ぎりぎりの車両を洗浄する際には、ブラシ毛が待機位置HPの当接部材22に接触してしまうことがあった。ブラシ5が当接部材22に接触すると、電流値が上昇するので、空転位置KPでのブラシ電流値を基に設定された上限電流閾値AHiと下限電流閾値ALoでは待機位置HP付近での車体との接触状態を正確に判断することができないという問題が生じていた。そのため、空転位置KPのブラシ電流値と、待機位置HPのブラシ電流値を検出し、それぞれに上限電流閾値AHiと下限電流閾値ALoを設定してデータ記憶部46に記憶しているのである。
【0027】
図8はブラシ位置による電流変化特性を示したグラフである。
図に示すように、待機位置HPではブラシ5が当接部材22に接触して電流値が上がり、ブラシ5が当接部材22から離れる方向に移動すると比例的に電流値が下がっていき、ブラシ5が空転位置KPで空転電流値となる。このため、エンコーダで検出されるブラシ5の移動位置が待機位置付近の第1洗浄領域S1にあるときは、待機位置HPのブラシ電流値A1に基づく上限電流閾値・下限電流閾値でブラシの移動を制御し、ブラシの移動位置が空転位置付近の第2洗浄領域S2にあるときは、空転位置KPのブラシ電流値A2に基づく上限電流閾値・下限電流閾値でブラシの移動を制御するのである。
【0028】
また、洗浄する車体部位毎に上限電流閾値と下限電流閾値を補正値Cで補正するのには次の理由がある。
すなわち、トラック型車両におけるキャビン部と箱部とでは幅寸法や高さ寸法が異なるため、ブラシとの接触面積に違いが生じる。加えて、キャビン部と箱部とでは強度そのものに違いがあるため、ブラシの接触圧を同じにすることはできない。そのため、車体部位毎に設定した補正値a・bで上限電流閾値と下限電流閾値を補正してデータ記憶部46に記憶しているのである。
【0029】
図9は車体部位毎の電流変化特性を示したグラフである。
図に示すように、キャビン上面を洗浄する際には、ブラシとの接触面積が小さく、ブラシの接触距離に対する電流上昇量が小さくなる。一方、箱体上面を洗浄する際には、ブラシとの接触面積が大きく、ブラシの接触距離に対する電流上昇量が大きくなる。また、キャビン上面に比べて箱体上面は丈夫であるため、ブラシの接触距離を箱体上面ではブラシをより接触させることができる。これにより、キャビン上面に対してはブラシを接触距離P1から接触距離P2まで接触させたときの電流変化率を補正値aとし、箱体上面に対してはブラシを接触距離P1’から接触距離P2’まで接触させたときの電流変化率を補正値bとしてデータ記憶部46に記憶している。
【0030】
こうして、ブラシ位置及び車体部位毎に上限閾値・下限閾値が設定され、図7に示すデータが与えられる。尚、図7では便宜上、全てのデータが異なる数値として表現しているが、同一の数値であっても構わない。
【0031】
続いて、本発明の洗車機の洗車動作について、図10を用いて説明する。
本体フレーム1は、走行位置スイッチ7がドッグ3aに接触する待機位置で洗浄する車両の入車待ち状態にある。車両が乗り入れられて、本体フレーム1前面の電装ボックス8a,8b間に設けた光電スイッチ10・11のうち、前方の光電スイッチ10が遮光、後方の光電スイッチ11が透光している状態になると、車両の停止位置と判断して停止を促す。こうして、車両が正規の停止位置に停車されると、操作パネル9での洗車受付を許可し、各キーにて選択動作を行った後、洗車スタートキー34を入力すると洗車がスタートする。
【0032】
洗車がスタートすると、上記した電流閾値の設定動作を実行した後、まず上面洗浄ブラシ5をキャビン上面位置まで下降させ、ブラシ5を正転させながら本体フレーム1を前進させる。ブラシモータ15の電流値で上面洗浄ブラシ5がトラックTのキャビン上面に接触したことを検出すると、本体フレーム1を前進させたまま、昇降モータ19を制御してキャビン上面のブラッシング洗浄を行う。このとき、昇降位置検出部40で検出される上面洗浄ブラシ5の昇降位置が当接部材22に接触する第1洗浄領域S1にあるときは、図7に示す『キャビン上面−第1洗浄領域P1』の下限電流閾値A1aLo〜上限電流閾値A1aHiの範囲になるように昇降モータ19が制御され、第2洗浄領域S2にあるときは、『キャビン上面−第2洗浄領域P2』の下限電流閾値A2aLo〜上限電流閾値A2aHiの範囲になるように昇降モータ19が制御されることになる。ここでは、キャビン上面において上面洗浄ブラシ5は当接部材22に接触しない第2洗浄領域S2にあるので、下限電流閾値A2aLo〜上限電流閾値A2aHiの範囲になるように昇降モータ19が制御される。
【0033】
キャビン上面洗浄が終わると、引き続き昇降モータ19を制御して箱体上面のブラッシング洗浄を行う。このとき、昇降位置検出部40で検出される上面洗浄ブラシ5の昇降位置が当接部材22に接触する第1洗浄領域S1にあるときは、図7に示す『箱体上面−第1洗浄領域P1』の下限電流閾値A1bLo〜上限電流閾値A1bHiの範囲になるように昇降モータ19が制御され、第2洗浄領域S2にあるときは、『箱体上面−第2洗浄領域P2』の下限電流閾値A2bLo〜上限電流閾値A2bHiの範囲になるように昇降モータ19が制御されることになる。ここでは、箱体上面において上面洗浄ブラシ5は当接部材22に接触する第1洗浄領域S2にあるので、下限電流閾値A1bLo〜上限電流閾値A1bHiの範囲になるように昇降モータ19が制御される。
【0034】
本体フレーム1の前進により、上面洗浄ブラシ5が光電スイッチ11・12で検出するトラック後端に達したら、本体フレーム1を前進させたままブラシ5を上昇させ、ブラシ5が上限位置に達したら、本体フレーム1の走行を停止させて洗車終了となる。尚、ここで設定されるキャビンと箱体の境界位置は、一般的なトラック形状に基づいて予め記憶されており、各走行モータ4・昇降モータ19の駆動時間により位置制御されるものである。
【0035】
本発明は以上のように構成されるもので、ブラシと車体との接触状態を判断するための基準値を、ブラシ位置や車体洗浄位置に応じて切り替えるようにしたので、ブラシの凍結防止措置として当接部材を設け、この当接部材に接触する状態で車体洗浄が行われる状況があっても適正なブラシ圧でブラシを車体に作用させることができるのである。このような構成は、トラックを洗浄する大型洗車機のみならず、軽自動車から大型車まで洗車可能にした一般的な門型洗車機にも有効に採用できる。また、説明は省略したが、側面洗浄ブラシやロッカーブラシでも同様に利用できるものである。
【符号の説明】
【0036】
1 本体フレーム
4 走行モータ
5 上面洗浄ブラシ
6・6 側面洗浄ブラシ
9 操作パネル
15 ブラシモータ
19 昇降モータ
20 昇降エンコーダ
25 ブラシモータ
28 開閉モータ
30 開閉エンコーダ
33 洗車制御部
34 外気温センサ
38 走行位置検出部
39 電流検出部(上面洗浄ブラシ)
40 昇降位置検出部
41 昇降制御部
42 電流検出部(側面洗浄ブラシ)
43 開閉位置検出部
44 開閉制御部
45 データ作成部
46 データ記憶部
47 凍結防止制御部
【特許請求の範囲】
【請求項1】
洗車機本体と自動車とが相対移動し、移動に伴い洗車機本体内に備えた洗車ブラシを車体面に移動させて洗車を行う洗車機であって、
前記洗車ブラシを車体に接離するブラシ移動手段と、洗車ブラシの移動位置を検出する移動位置検出手段と、洗車ブラシを回転駆動するブラシモータと、該ブラシモータの電流値を検出する電流値検出手段と、ブラシモータ電流値が所定範囲内になるように前記ブラシ移動手段を制御する制御手段とを備えた洗車機において、
前記制御手段は、洗車ブラシが車体以外に接触する可能性がある位置でブラシモータを回転させたときの電流値から第1電流閾値を設定するとともに、洗浄ブラシが車体以外に接触する可能性がない位置でブラシモータを回転させたときの電流値から第2電流閾値を設定し、洗車ブラシの移動位置に応じて車体との接触を判断する基準閾値を切り替えてブラシ移動手段を制御することを特徴とする洗車機。
【請求項1】
洗車機本体と自動車とが相対移動し、移動に伴い洗車機本体内に備えた洗車ブラシを車体面に移動させて洗車を行う洗車機であって、
前記洗車ブラシを車体に接離するブラシ移動手段と、洗車ブラシの移動位置を検出する移動位置検出手段と、洗車ブラシを回転駆動するブラシモータと、該ブラシモータの電流値を検出する電流値検出手段と、ブラシモータ電流値が所定範囲内になるように前記ブラシ移動手段を制御する制御手段とを備えた洗車機において、
前記制御手段は、洗車ブラシが車体以外に接触する可能性がある位置でブラシモータを回転させたときの電流値から第1電流閾値を設定するとともに、洗浄ブラシが車体以外に接触する可能性がない位置でブラシモータを回転させたときの電流値から第2電流閾値を設定し、洗車ブラシの移動位置に応じて車体との接触を判断する基準閾値を切り替えてブラシ移動手段を制御することを特徴とする洗車機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−201251(P2012−201251A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−68315(P2011−68315)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000103138)エムケー精工株式会社 (174)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000103138)エムケー精工株式会社 (174)
【Fターム(参考)】
[ Back to top ]