
津波避難ナビゲーションシステム、その方法及びプログラム
【課題】地震が起きてから津波が来るまでの時間に、各人について必要な情報を取得して解析し、精細なデジタル標高データを利用したきめ細かな避難案内を行なうこと。
【解決手段】津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得手段と、到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得手段と、前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、決定した避難場所および避難ルートを提示する提示手段と、を備えたことを特徴とする。
【解決手段】津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得手段と、到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得手段と、前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、決定した避難場所および避難ルートを提示する提示手段と、を備えたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、津波からの避難を案内する技術に関する。
【背景技術】
【0002】
上記技術分野において、特許文献1に示されているように、精細なデジタル標高データを用いて洪水ハザードマップを生成する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−340743号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、あくまでも洪水が起こった場合の浸水状況をシミュレートするものであって、津波に対応することができなかった。
【0005】
2011年3月11日の東日本大震災の被害状況を目の当たりにすると、事前の津波ハザードマップの予測を遥かに上回る破壊力や浸水地域の広大さ、世界一の大防潮堤などの破壊でその無力さを痛感せざるを得ない。
【0006】
今後はとにかく津波警報が出た段階で、できるだけ早く安全な避難場所に全力で避難することが、命が助かるための最もよい手段であるという考え方が、専門家を含めた主要意見となってきている。
【0007】
しかし、今までは、ある地域にいるすべての人に一律に避難場所を設定していた。また、そこまでの最短ルートを避難ルートとして提示していた。このような単純なやり方では、多くの人を救うことができなかった。
【0008】
本発明の目的は、上述の課題を解決する技術を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明に係るシステムは、
津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、
避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得手段と、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得手段と、
前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、
決定した避難場所および避難ルートを提示する提示手段と、
を備えたことを特徴とする。
【0010】
上記目的を達成するため、本発明に係る方法は、
津波からの避難方法を提示するための津波避難ナビゲーション方法であって、
避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする。
【0011】
上記目的を達成するため、本発明に係るプログラムは、
津波からの避難方法を提示するための津波避難ナビゲーションプログラムであって、
避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする。
【発明の効果】
【0012】
本発明によれば、地震が起きてから津波が来るまでの時間に、各人について必要な情報を取得して解析し、精細なデジタル標高データを利用したきめ細かな避難案内を行なうことができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る津波避難ナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施形態に係る津波避難ナビゲーションシステムの動作を説明するシーケンス図である。
【図3】本発明の実施形態に係る津波避難ナビゲーションシステムの処理の流れを説明するフローチャートである。
【図4】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図5】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図6】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図7】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図8】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図9】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図10】本発明の実施形態に係る津波避難ナビゲーションシステムの動作を説明するシーケンス図である。
【図11】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図12】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図13】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図14】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図15】本発明の実施形態に係る津波避難ナビゲーションシステムの動作を説明するシーケンス図である。
【図16】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図17】本発明の実施形態に係るデジタル標高データ抽出処理を示すフローチャートである。
【図18】衛星によるリモートセンシングを説明する図である。
【図19】ステレオペア画像の撮像について説明する図である。
【図20】ステレオペア画像から標高を算出する方法について説明する図である。
【図21】ステレオペア画像から標高を算出する方法について説明する図である。
【図22】ステレオペア画像から標高を算出する方法について説明する図である。
【発明を実施するための形態】
【0014】
以下に、図面を参照して、本発明の実施の形態について例示的に詳しく説明する。ただし、以下の実施の形態に記載されている構成要素はあくまで例示であり、本発明の技術範囲をそれらのみに限定する趣旨のものではない。
【0015】
《前提》
多くの災害の中でも、津波には以下に示すような複数の特殊性が存在する。
(1)最も大きな特徴は、地震発生を条件とする点である。つまり、他の突発的な災害と異なり、津波が到達する時刻を予測できるため、避難にかけることができる時間が決まる。
(2)気象庁などの発表により、津波の大きさと発生位置は、瞬時に予測できる。津波の大きさと発生位置により、避難場所候補は一定範囲に絞られる。
(3)避難場所までの避難ルートを決定するにあたり、避難ルート上の各点における標高データが重要な意味をもつ。単に最短ルートを設定したのでは、避難中に津波にのまれるケースが起こりえるからである。
(4)どこに避難すべきか、どのように避難すべきかについては、各人の能力、位置および状況によっても大きく異なる。例えば老人や車いす利用者など早い歩行が困難な人、車を持っている人、集団で避難する人など、津波が来た場合に、それぞれ最適な避難場所、避難ルートは異なる。
(5)高い場所に逃げるべきという普遍的なルールが存在する。
【0016】
以上の特殊性を踏まえ、本実施形態では以下のような構成および動作を実現する津波避難ナビゲーションシステム100を提案する。
【0017】
《システム構成》
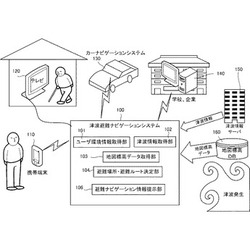
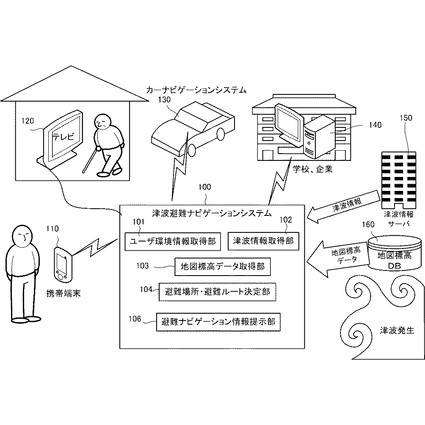
本発明の第1実施形態としての津波避難ナビゲーションシステム100について、図1を用いて説明する。津波避難ナビゲーションシステム100は、ネットワークを介して、携帯端末110や、テレビ120、カーナビゲーションシステム130、PC140、気象庁や放送局などの津波情報サーバ150および地図標高データベース160と接続されている。
【0018】
図1に示すように、津波避難ナビゲーションシステム100は、ユーザ環境情報取得部101、津波情報取得部102、地図標高データ取得部103、避難場所・避難ルート決定部105、避難ナビゲーション情報提示部106を含む。
【0019】
まず、ユーザ環境情報取得部101は、ネットワークを介して接続された各種の端末からあるいはあらかじめシステム内に用意されたユーザ情報記憶部(不図示)からユーザ環境情報を取得する。ユーザ環境情報としては、ユーザの現在地、歩行(走行)速度、車いす利用の有無、集団避難の有無など、が挙げられる。
【0020】
津波情報取得部102は、気象庁などの津波情報サーバ150から津波情報を取得する。津波情報としては、まず津波警報を取得し、その後、津波到達場所・津波到達時刻・津波高さ・津波速さなどの情報を取得する。
【0021】
地図標高データ取得部103は、地図標高データベース160から、地図標高データを取得する。地図標高データとは、ユーザの現在位置を含む地図データと、地図上の各地点の標高データとを組み合わせたデータである。図1では、地図標高データベース160を津波避難ナビゲーションシステム100の外側に表わしているが、本発明はこれに限定されるものではなく、津波避難ナビゲーションシステム100が地図標高データベース160を含んでもよい。
【0022】
避難場所・避難ルート決定部104は、ユーザ環境情報取得部101と、津波情報取得部102と、地図標高データ取得部103とから取得した情報に基づいて、避難場所および避難ルートを決定する。具体的には、ユーザの移動速度と、津波到達時刻までの時間とを積算して、避難可能距離を算出し、現在地から避難可能距離を半径とする円の中に含まれる複数の地点について、標高の高さ、海岸からの遠さ、場所の分かりやすさなどをベースに安全性を評価する。それらの地点の中で、避難場所としての評価が高いものからリストアップして避難場所候補リストを生成する。避難場所候補のそれぞれについて、避難ルートを算出する。地図標高データには、渋滞しやすい道路や、標高の低い場所や、川沿いの道など、避難に適さない道があらかじめ登録されている。したがって、それらの避難に適さない道を通らない避難ルートを生成する。各避難ルートについて、坂道や障害物の存在を考慮して避難場所まで到達するために要する時間を求める。そうして最終的に、安全でかつ最も早く到着できる避難場所およびそこまでの安全な避難ルートを決定する。避難ルートは柔軟に決定する。避難ルートとしては道路に限定されず、最短時間で避難場所まで行くため、畑の中を突っ切るルートなどを決定してもよい。そのためには、地図データ上において、畑の中や低いフェンスを越える道など、人が通れる場所か否かをあらかじめ各地点のメタデータとしてもたせて置く。一方で、渋滞履歴などを参照して、混雑する道を回避する避難ルートを決定してもよい。
【0023】
避難中に時間に余裕が生じれば、より安全な避難場所を決定して避難ルートを変更してもよい。また、複数の避難場所候補をユーザに提示して、ユーザが分かりやすい場所を選択する仕組みでもよい。
【0024】
避難ナビゲーション情報提示部106は、携帯端末110やテレビ120などのユーザ端末に対して、避難場所・避難ルート決定部104が決定した避難場所および避難ルートを含む避難ナビゲーション情報を提供する。
【0025】
なお、津波避難ナビゲーションシステム100は、ネットワーク上に存在するものに限定されない。例えば、家庭のテレビ120と接続するセットトップボックスのようなものでもよいし、カーナビゲーションシステム130の一部であってもよい。その場合、ユーザ環境情報取得部101は、ユーザやサービスマンの入力操作によってユーザ環境情報を直接取得してもよい。また、津波情報取得部102は、津波情報サーバ150としての放送局から受信したデジタル放送データを解析して、津波警報他の各種津波情報を取得してもよい。また、その場合、地図標高データベース160を津波避難ナビゲーションシステム100の一部として備えてもよい。その場合、ユーザやサービスマンの更新操作によって、定期的に地図標高データを更新すればよい。例えば、インターネットに接続可能であれば、定期的に地図標高データを更新する構成でもよいし、地方自治体などにより配布された地図DVDなどの記憶メディアから最新データをインストールする構成でもよい。
【0026】
《携帯端末またはPCへのナビゲーション情報提供》
まず、津波避難ナビゲーションシステム100が携帯端末110またはPC140に対してサービスを提供する場合について図2乃至図9を参照して説明する。
【0027】
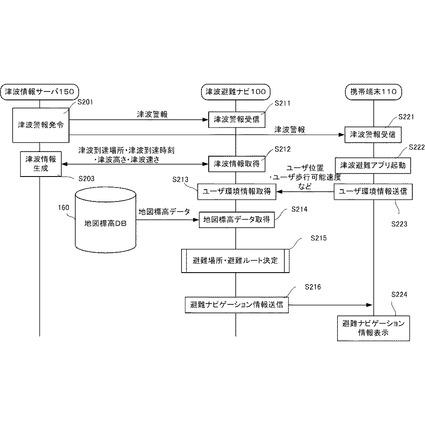
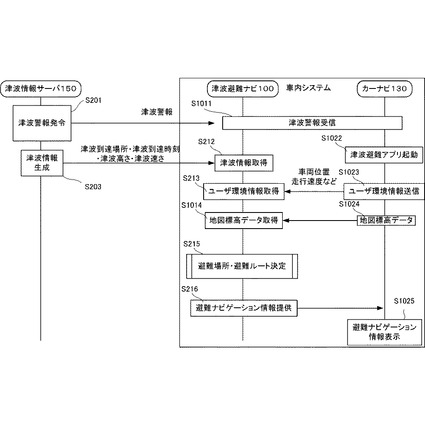
図2は、津波からの避難誘導を行なうためのシーケンス図である。まず、大きな規模の地震が起こると、津波情報サーバ150は、ステップS201において、津波警報を発令して、ステップS203において、津波情報を生成する。津波情報としては、津波到達場所・津波到達時刻・津波高さ・津波速さが含まれる。
【0028】
津波避難ナビゲーションシステム100は、ステップS211において津波警報を受信すると、津波情報を受信する準備を行ない、ステップS212において津波情報を取得する。
【0029】
一方携帯端末110では、ステップS211において津波警報を受信して、ユーザに対して津波が来る旨を通知すると同時にステップS222において、津波避難アプリケーションを起動する。携帯端末110はこのアプリケーションの起動を自動で行なってもよいが、ユーザに対して「津波避難アプリケーションを起動しますか?」といったメッセージを表示して確認してから起動してもよい。
【0030】
携帯端末110において津波避難アプリケーションが起動されるとあらかじめ設定されたアドレス(津波避難ナビゲーションシステムのアドレス)に対して、ユーザ環境情報を送信する。
【0031】
津波避難ナビゲーションシステム100は、ステップS213において、ユーザ環境情報を受信すると、ステップS214に進み、ユーザの現在地の周囲の地図標高データを地図標高データベース160から読出す。
【0032】
そして、ステップS215において、津波避難ナビゲーションシステム100は、避難場所および避難ルートを決定する。
【0033】
最後に津波避難ナビゲーションシステム100が、避難ナビゲーション情報を携帯端末110に送信すると(S216)、携帯端末110では、受信した避難ナビゲーション情報が表示される(S224)。
【0034】
次に避難場所および避難ルートの決定方法について図3のフローチャートを用いて説明
する。
【0035】
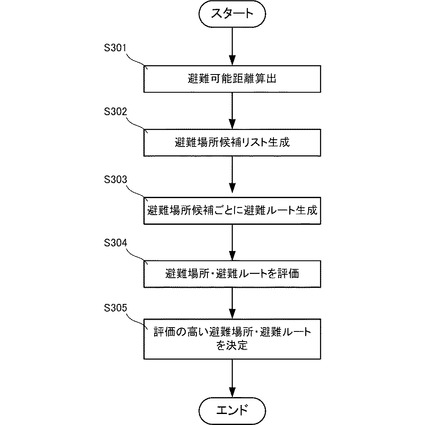
まず、ステップS301において、ユーザ環境情報を用いて、避難可能距離を算出する。具体的には、避難時の歩行速度や走行速度に、現在時刻から津波到達時刻までの時間を積算する。
【0036】
次にステップS302において、ユーザの現在位置を中心として、避難可能距離を半径とする円を、地図上に描く。その円の中に存在する複数の地点の中で、標高が津波高さよりも十分に大きい地点を選択する。選択された地点の中で、標高が高いものから順に並べて避難場所候補リストを生成する。津波高さより十分に標高が高い地点であれば、海岸から遠い地点、ユーザの現在地から近い地点、知名度の高い地点(スーパー、市役所、学校、病院、駅など)を評価の高い避難場所候補とする。つまり、複数の地点について、標高の高さ、海岸からの遠さ、場所の分かりやすさなどをベースに点数を加算して、総合的に避難のしやすさおよび安全性を評価する。それらの地点の中で、避難場所としての評価が高いものからリストアップして避難場所候補リストを生成する。
【0037】
次に、ステップS303において、避難場所候補のそれぞれについて、避難ルートを生成し、ステップS304において、避難場所および避難ルートを評価する。地図標高データには、渋滞しやすい道路や、標高の低い場所や、川沿いの道や、海岸線から延びた道路など、避難に適さない道があらかじめ登録されている。したがって、それらの避難に適さない道を通らない避難ルートを生成する。避難に適さない道を通らない避難ルートのなかで、避難にかかる予想時間の小さいルート、避難が容易なルートを選択する。予想時間を求めるにあたり、やはり標高データを用いて、坂道などを考慮に入れることが望ましい。推奨避難ルートは時間の経過と共に変化する。そのため、避難開始処理を行なわない限り、避難ルートを随時更新する。地震から経過する時間に応じて通れる道の選択肢が少なくなる。最後に、ステップS305において、評価の高い避難場所および避難ルートを決定する。
【0038】
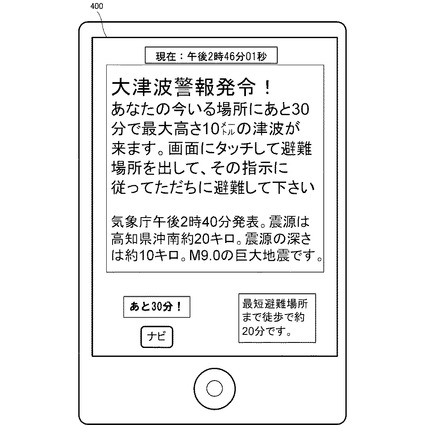
図4乃至図9は、津波避難ナビゲーションシステム100によって、携帯端末110のディスプレイに表示される画面例を示す図である。図4は、大津波警報が発令された場合の画面例400を示している。震源地、震源深さ、地震規模の他、津波高さや津波到達時刻に関する情報を表示している。さらに現在地と、避難に用いることのできる時間および最短避難場所までの所要時間を表示する。ここでナビボタンを選択すると、図5の画面が表示される。
【0039】
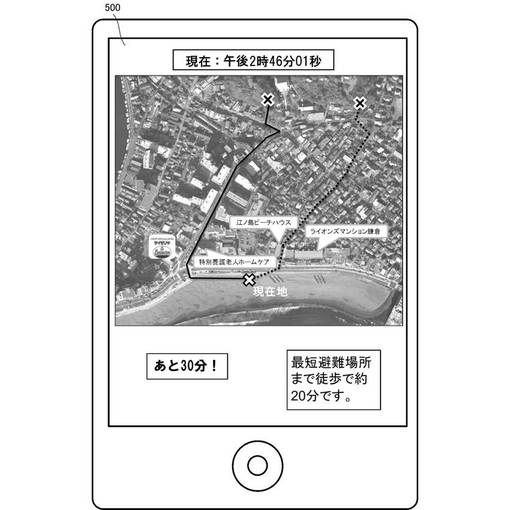
図5は、現在地からの避難場所および避難ルートを2次元的に表示するナビゲーション画面例500を示す図である。このように本実施形態では、通るべきでない避難路を明示する。
【0040】
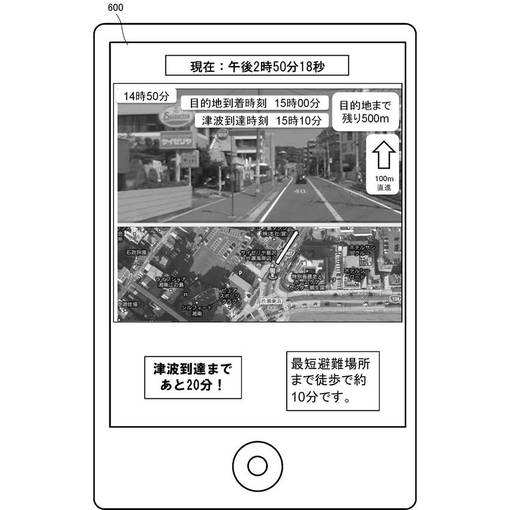
図6は、現在地からの避難場所および避難ルートを3次元的に立体表示するナビゲーション画面例600を示す図である。また、この画面600では、現在時刻の他、目的地到着予想時刻、津波到達時刻、目的地までの距離、進むべき方向などを表示する。2次元的に表示する下側の画面では、ランドマークとなる建物および経路を表示する。
【0041】
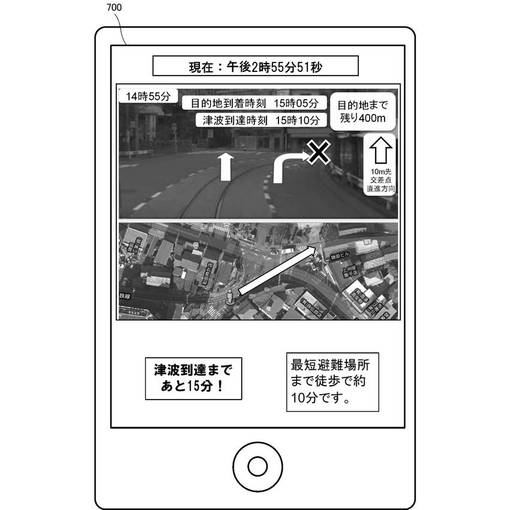
図7は、交差点にさしかかった場合の、ナビゲーション画面例700を示す図である。一般のカーナビゲーションシステムと異なり、進んではいけない道路を明確に表示する。さらには、津波到達までの時間、最短避難場所までの所要時間を表示する。
【0042】
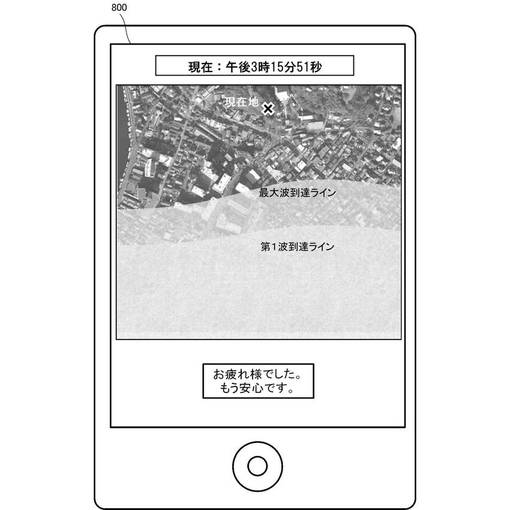
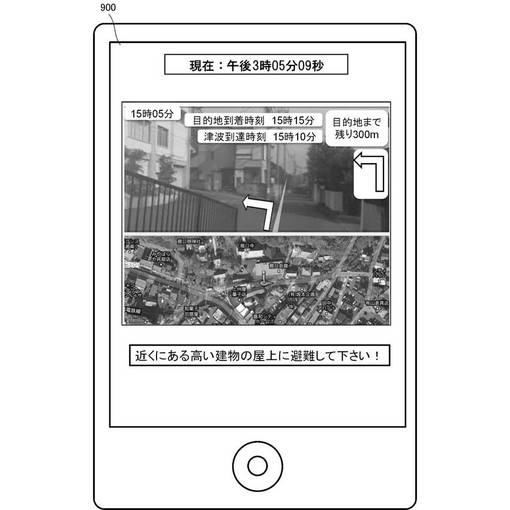
図8は、避難場所に到着した際に表示される画面例800を示す図である。一方、図9は、推奨する避難場所への避難が困難(間に合わない)と判断した場合に表示される画面例900を示す図である。
【0043】
《カーナビゲーションシステムへのナビゲーション情報提供》
まず、津波避難ナビゲーションシステム100がカーナビゲーションシステム130に対してサービスを提供する場合について図10乃至図14を参照して説明する。図10において、図2で説明したものと同じ処理について同じ符号を付してここでは詳細な説明を省略する。カーナビゲーションシステム130を利用する場合、津波情報サーバ150からの津波警報は、車内システム全体として受信する(S1011)。カーナビゲーションシステム130は、津波警報を受信すると津波避難アプリケーションを起動する(S1022)。
【0044】
カーナビゲーションシステム130は、津波避難アプリケーションを起動すると、ユーザ環境情報を津波避難ナビゲーションシステム100に渡す。ここでのユーザ環境情報は、車両位置、走行速度、渋滞情報などである。津波避難ナビゲーションシステム100は、ユーザ環境情報を取得する(S213)
次に、カーナビゲーションシステム130は、地図標高データを津波避難ナビゲーションシステム100に渡す。カーナビゲーションシステム130は通常地図データを有しているため、標高データのみ、別に津波避難ナビゲーションシステム100が保有していてもよい。
【0045】
津波避難ナビゲーションシステム100は、取得した情報に基づいて、避難場所および避難ルートを決定する(S215)。その際、車両を降りて歩くべきタイミングも含めてカーナビゲーションシステム130に通知する。例えば道路が渋滞している場合、津波が近づいている場合、道を間違えてUターンできない場合など、車両から降りて歩くルートを決定する。その場合ステップS216では、車両から降りて歩くように促すメッセージをカーナビゲーションシステム130に提供する。カーナビゲーションシステム130は、津波避難ナビゲーションシステム100から取得した情報を基に避難ナビゲーション情報を表示する。また、間違った道を選択しないように警告するメッセージや、あるいは間違った道を選択したことを警告するメッセージなどを表示させる。
【0046】
なお、ここでは、車内に津波避難ナビゲーションシステム100を設けた例を示したが、本発明はこれに限定されない。車内のナビゲーションシステムが車外ネットワークと繋がっている場合には、車外ネットワーク上に津波避難ナビゲーションシステム100を設け、無線通信などで避難ナビゲーション情報をカーナビゲーションシステム130に送信すればよい。その場合、渋滞回避のために、同時刻に、同位置に所定台数以上の車が走らないように、各車両のカーナビゲーションシステム130に対して調整して案内することが可能となる。例えば第1候補の避難ルートを選択した車両が一定数に達した場合には、他の車両に対しては第2候補の避難ルートを提示するなどの調整方法が考えられる。
【0047】
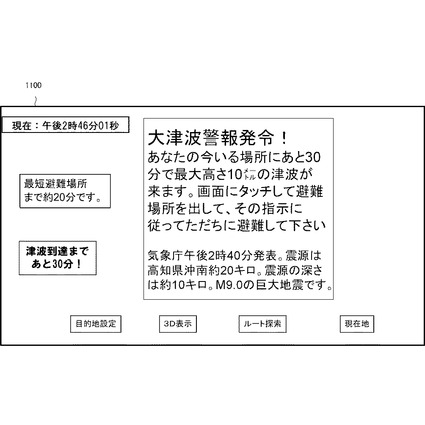
図11乃至図14は、津波避難ナビゲーションシステム100によって、携帯端末110のディスプレイに表示される画面例1100〜1400を示す図である。図11は、大津波警報が発令された場合の画面例1100を示している。警報発令を通知するメッセージの他、震源地、震源深さ、地震規模の他、推定津波高さや推定津波到達時刻に関する情報を表示している。さらに、避難に用いることのできる時間および最短避難場所までの所要時間を表示する。ここでルート探索ボタンを選択すると、図12〜図14の画面が表示される。
【0048】
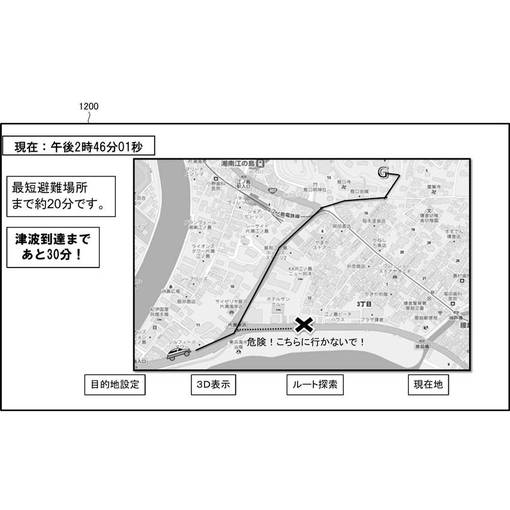
図12は、現在地から目指すべき避難場所および避難ルートを2次元的に表示するナビゲーション画面例1200を示す図である。また、この画面1200では、現在時刻の他、目的地到着予想時刻、津波到達時刻、目的地までの距離、進むべき方向などを表示してもよい。さらに、この画面において、絶対に走行すべきではない道や領域を警告表示する。
【0049】
図13は、交差点にさしかかった場合の、ナビゲーション画面例1300を示す図である。一般のカーナビゲーションシステムと異なり、進んではいけない道路を明確に表示する。さらには、津波到達までの時間、最短避難場所までの所要時間を表示する。図14は、車から降りるべきメッセージが表示された画面例1400を示す図である。
【0050】
《テレビ受像器へのナビゲーション情報提供》
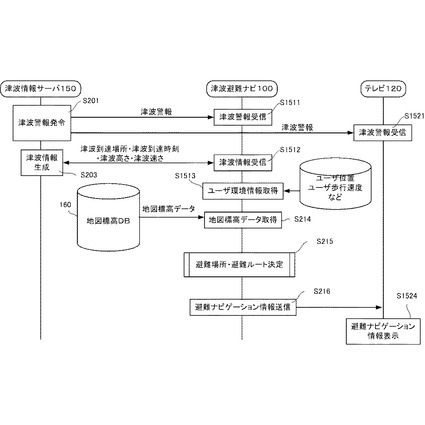
まず、津波避難ナビゲーションシステム100がテレビ120に対してサービスを提供する場合について図15、図16を参照して説明する。この場合、津波避難ナビゲーションシステム100は、テレビ120に直接接続されるセットトップボックスである。あらかじめ地方自治体が作成した集落単位の津波避難経路詳細地図と、テレビ120が設置されたユーザ住所を記憶している。これらの情報は、ユーザ自身、市の職員、または電気店の店員などが登録すればよい。
【0051】
ここでの津波避難ナビゲーションシステム100は、テレビ局からの放送データを分析することにより津波警報や津波情報を取得する(S1511、S1512)。津波避難ナビゲーションシステム100は、津波警報を受信すると、テレビ120の電源を強制的に投入して、津波避難ナビゲーションシステム100からの画面を表示させる処理を行なってもよい。
【0052】
ステップS1513では、津波避難ナビゲーションシステム100内にあらかじめ登録されたテレビ設置位置や、ユーザの歩行速度、車いすの有無などを取得する。そして、ステップS1514でも同様に、津波避難ナビゲーションシステム100内にあらかじめ登録された地図標高データを取得する。
【0053】
そして、ステップS215では、図3を用いて説明したとおり、避難場所および避難ルートを決定し、最後に、テレビ120に対して、避難ナビゲーション情報を表示させる(S1524)。
【0054】
図16は、現在地から目指すべき避難場所および避難ルートを2次元的にテレビ120に表示した場合のナビゲーション画面例1600を示す図である。また、この画面1600では、現在時刻の他、目的地到着予想時刻、津波到達時刻、目的地までの距離、進むべき方向、分かりやすいランドマークとなる建物などを表示してもよい。さらに、この画面において、絶対に走行すべきではない道や領域を警告表示してもよい。
【0055】
以上に説明したような、津波避難ナビゲーションシステム100を用いて、避難訓練を行なってもよい。その場合、津波到着予想時刻やその規模などを設定して地域全体で同時に訓練を行なうことが望ましい。避難訓練時のユーザの動作データ、移動データなどを津波避難ナビゲーションシステムに蓄積していくことで、避難場所および避難ルートをより精度良く決定可能となる。避難訓練を地域一帯で行なうことによって、実際に起きた時の混雑状況が予測できる。津波がどの時間帯に到達したかに応じて、避難場所や避難ルートを変更することが望ましい。例えば、夜の場合には、分かりやすい幹線道路を通って避難するように避難ルートを決定する。
【0056】
《地図標高データの生成処理》
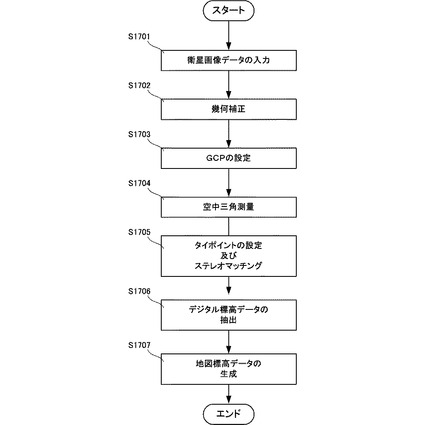
次に、図17のフローチャートを用いて、地図標高データの生成処理について説明する。本実施形態では、上述の避難ナビゲーションの前提として以下の様な処理の流れによって地図標高データを生成する。この生成処理は、例えば一月に1度などの頻度で定期的に行なっても良いし、或いは、津波警報発令を受けて最新の衛星画像データを衛星画像DBから取得して、そのタイミングで地図標高データを生成してもよい。
【0057】
地図標高データの生成のための最初の処理として、ステップS1701において、衛星画像データを入力する。ステップS1701で入力される衛星画像データは、QuickBird衛星によってリモートセンシングされた画像データであり、放射補正、およびセンサ補正がなされたものである。ここで、放射補正とは、センサ素子間の相対放射反応、非反応検知センサ素子の補填、および絶対放射測定に対する補正である。またセンサ補正とは、センサ内部構造、光学ひずみ、走査ひずみなどを考慮した補正である。
【0058】
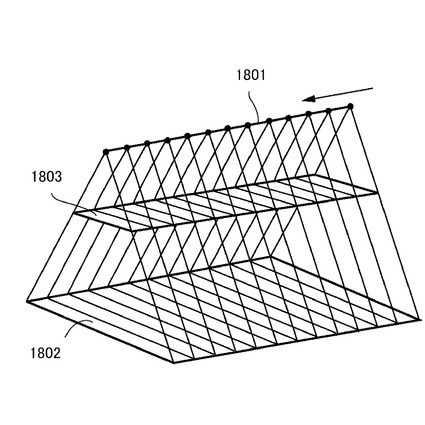
衛星によるリモートセンシングの様子を図18に示す。QuickBird衛星などの撮像衛星は、衛星軌道1801上を矢印方向に秒速約8kmの速度で移動しながら、ラインセンサにより地表面1802をリモートセンシングする。衛星に搭載されたラインセンサは、地表面1802から受信した電磁波をイメージプレーン1803に投影してデジタルデータとして保存する。そしてこのデジタルデータに対し、放射補正およびセンサ補正を行ったものがステップS1701で入力される。QuickBird衛星の場合、リモートセンシングされた画像データの空間分解能は約61cm(直下点) から72cm(25度オフナディア角)であり、一度に約16.5km四方の地表面の画像を取込むことができる。
【0059】
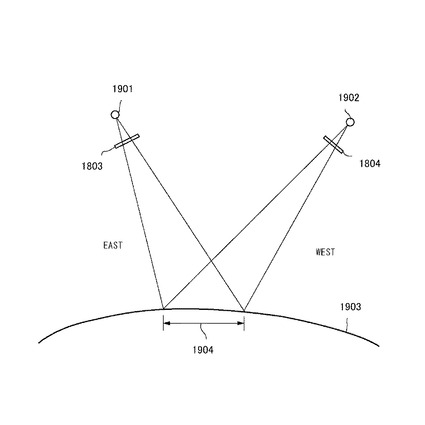
ステップS1701では、このようにリモートセンシングされた画像データが、少なくとも2種類用意される。それらは、異なる位置にある衛星のセンサ、または、一つの衛星に設けられた異なるセンサから同じ地域をリモートセンシングすることにより得られた画像データである。その関係を図19に示す。1901および1902が衛星の軌道であり、1903が地表面である。1904が撮像対象領域である。QuickBird衛星を用いる場合には、1つの衛星で異なる軌道上から同じ地域を撮像することが可能であるが、それぞれ異なる衛星から同じ地域を撮像してもよい。なお、QuickBird衛星は南北に周回する衛星であるから、その軌道は東西にずれたものとなる。また、QuickBird衛星などの商用衛星では、衛星が1つの軌道を北から南に移動する間にセンサの向きを変更し同一の領域をほぼ同時に2方向から撮像しステレオペア画像を取得する機能がある。この機能を利用した場合には、図19の1901および1902は、同一の軌道上の異なる時間の衛星位置を示すことになる。
【0060】
なお、ステップS1701では、画像データのみならず、画像サポートデータ(ISD)が入力される。画像サポートデータには、少なくともその画像を撮像した衛星の位置および時刻の情報が含まれている。画像サポートデータとしては、例えば、姿勢データ(最初のデータ点の時刻、点数、点間隔と姿勢情報)、衛星軌道暦データ(最初のデータ点の時刻、点数、点間隔と衛星軌道情報)、幾何補正データ(衛星のセンサおよび光学系をモデル化した仮想カメラモデルの写真測量用のパラメータ:焦点距離、中心軸座標など)、画像メタデータ(製品のレベル、画像4隅の座標値(緯度、経度)、地図投影法の情報を含む画像製品などの主要な属性と、画像取得時刻)、RPC(RAPID POSITIONING CAPABILITY EXTENSION FORMAT)データ(空間の4隅の座標値と画像の4隅の座標値とを数学的に対応させるデータ)が挙げられる。
【0061】
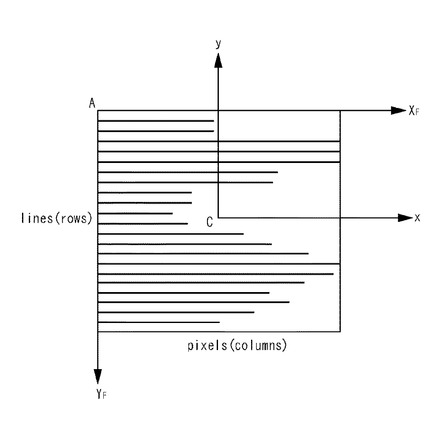
ステップS1701で入力する衛星画像データは、センサ補正がなされているので、衛星・センサの機構が起因する歪みは補正されているが、センサの移動や地球の自転による歪みが含まれている。そこで、ステップS1702において、そのような歪みを補正する。この補正を狭義の幾何補正と称する。ステップS1702では、さらに、衛星センサの焦点距離や視野角などの幾何学特性パラメータを用いて、ピクセル座標から衛星座標への変換係数を幾何学的に決定する。
【0062】
図20は、そのような座標変換について説明する図である。入力された衛星画像データは、画像データ格納領域において、Aを原点として、XF方向(列方向)にセンサの撮像素子ごとのデータが格納され、YF方向(行方向)にラインごとのデータが格納されている。ステップS1702では、このように格納されたデータを、Cを原点とするxy座標に変換する。ここでCは、撮像領域の中心点である。
【0063】
次に、ステップS1703において、GCPの設定を行い、ステップS1704において、空中三角測量を行なう。GCPには、三角点、水準点、もしくは、測量により得られた地点の座標、標高などが用いられる。日本国内の場合、25000分1の地形図が容易に入手できるので、交差点などの緯度経度、およびおよその標高を読み取りその値をGCPとして用いることができる。
【0064】
空中三角測量とは、衛星のラインアレイセンサで撮像された平面画像上の座標と地上座標系との関係を、センサ中心と、画像上のGCPの座標と、地上におけるGCPの位置が一直線上にあるという、共線条件を用いて解析する測量をいう。
【0065】
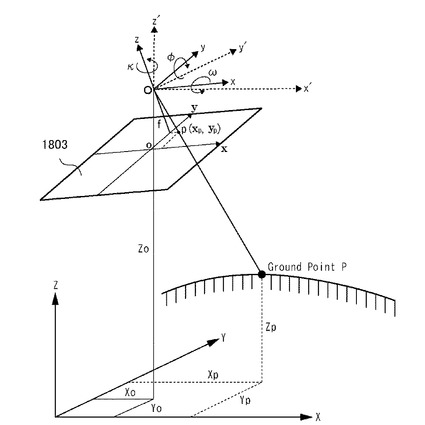
図21は、空中三角測量について説明する図である。図21において、衛星座標系(x,y,z)は、センサ位置Oを原点とし、センサの撮像方向をz軸とする座標系である。また、地上座標系(X,Y,Z)は、緯度、経度、標高が共に0の点を原点とし、東をX軸に、北をY軸に、基準標高面と垂直を成す方向をZ軸にもつ座標系である。なお、測量学では、通常X軸を北、Y軸を東とする座標系を用いているが、図21では、X軸を東、Y軸を北、Z軸を鉛直上方とした右手座標系を用いている。
【0066】
ここで、センサ位置Oを通る地上座標系と平行な座標系を(x',y',z')とすると、座標系(x',y',z')は、衛星座標系をx軸、y軸、z軸まわりに所定角度だけ回転させた座標系なので、それぞれの軸周りの回転角度をそれぞれ(ω、ψ、κ)とすれば、これらの座標系の変換式は、以下の式で表すことができる。
【数1】

ここで、
【数2】
であり、
m11=cosψ×cosκ
m12=−cosψ×cosκ
m13=sinψ
m21=cosω×sinκ+sinω×sinψ×cosκ
m22=cosω×cosκ−sinω×sinψ×sinκ
m23=sinω×cosψ
m31=sinω×sinκ−cosω×sinψ×cosκ
m32=sinω×cosκ+cosω×sinψ×sinκ
m33=cosω×cosψ
である。
【0067】
したがって、衛星座標系と地上座標系のスケール変換率をkとすると、衛星座標系と地上座標系の関係は、
【数3】
となる。
【0068】
また、図21において、地表面上の点Pの座標を、地上座標系で(XP,YP,ZP)とし、点Pを撮像した時点のセンサ位置Oの座標を、地上座標系で(XO,YO,ZO)とする。さらに、点Pの投影点pの、画像データ上の座標を(xP,yP)とする。画像データ上の原点oは、衛星座標系において、焦点距離fを用いて、(−xo,−yo,−f)で表すことができるので、点Pの投影点pは、衛星座標系において、(xP−xo,yP−yo,−f)と表される。
【0069】
このとき、OとpとPは一直線上に存在するので、
【数4】
という関係式を得ることができる。
【0070】
この式を展開すると、以下の共線条件式が得られる。
【数5】
この式は、任意の地上の点Pについて成り立つが、GCPを対象物とした場合、(XP,YP,ZP)と、(xP,yP)は既知であり、さらに、焦点距離fも既知であるため、センサ位置(XO,YO,ZO)およびセンサの撮像方向(ω、ψ、κ)ならびに、(xo,yo)の関係が得られることになる。
【0071】
ところで、QuickBird衛星などのセンサ位置(XO,YO,ZO)およびセンサの撮像方向(ω、ψ、κ)(これらをまとめて評定要素と称する)は、上述の画像サポートデータとして、ある程度まで提供されている。例えば、QuickBird衛星の場合、20μsecごとの評定要素が提供されている。20μsecは、約200スキャンラインに対応するため、各スキャンラインの評定要素は、提供された評定要素から補間する必要がある。衛星の軌道は時間によって変化するが安定しているので、評定要素の変化は小さくまたスムーズである。各スキャンラインの評定要素は、以下のような3次の多項式を用いて表すことができる。
XO(t)=a0+a1t+a2t2+a3t3
YO(t)=b0+b1t+b2t2+b3t3
ZO(t)=c0+c1t+c2t2+c3t3
ω(t)=d0+d1t+d2t2+d3t3
ψ(t)=e0+e1t+e2t2+e3t3
κ(t)=f0+f1t+f2t2+f3t3
ここでa0、a1、a2、a3などのすべての係数は、画像サポートデータとして提供される評定要素から解析的に算出できる。また、点Pの画像pを取得した時刻tも画像サポートデータから導くことができる。これにより、先の共線条件式の右辺が一意に定まり、1つのGCPのデータから、(xo,yo)が求まることになる。上述したように、上記共線条件式は地表面上の任意の点について成り立つので、ステップS1701で入力した衛星画像データにおいて、対象物の画像の座標(x,y)が分かれば、経度Xと緯度Yと標高Zの関係を示す一次関係式が2つ求まることになる。
【0072】
なお、複数のGCPについて、上述の共線条件式を適用した場合、評定要素や、GCPの計測に含まれる誤差により、右辺と左辺がわずかではあるが一致していない場合がある。その場合、両辺の残差を0に近づけるように逐次緩和法を用いて各係数を調整することで、係数の精度を上げることができる。
【0073】
次に、ステップS1705において、タイポイントの設定およびステレオマッチングを行なう。タイポイントとは、複数の衛星画像データにおいて同一の地上の対象物(交差点、特徴的な建造物など)を表した対応点である。ステレオマッチングとは、2つの衛星画像データにおいて、タイポイントの座標比較を行なう処理である。
【0074】
タイポイントは、2枚の画像を見比べることによりオペレータが設定してもよいが、基本的には画像処理プログラムにより自動的に求められる。2枚の画像データからそれぞれ小さな窓領域(例えば7×7ピクセル程度)を抽出し、最も類似度の高い領域同士を探しだし、タイポイントとして定義することが可能である。このようにタイポイントを設定することにより、2つの画像データを対応付けることができる。
【0075】
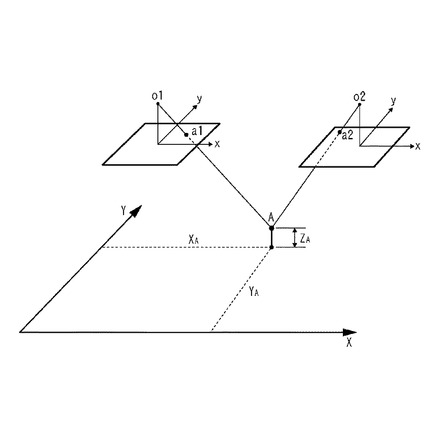
ステレオマッチングにより2つの画像データにおける同じタイポイントの座標が導き出されると、その位置のずれから標高を算出することができる。2つの衛星画像により、同一地域について、取得したステレオ画像間では、対応する地表物の位置は、基準標高からの差の分だけ位置ずれ(視差)を生じている。この位置ずれを計測することにより、逆に基準標高からの差、すなわち標高を求めることができる。
【0076】
図22を用いて、複数の衛星画像を用いて標高データを導き出す方法について詳しく説明する。図22は、異なる位置のセンサO1,O2から同一の対象物(タイポイント)Aを撮像したときの衛星画像上の点a1,a2とタイポイントの経度XA、緯度YA、標高ZAの関係を示す図である。
【0077】
センサO1の位置を地上座標系で(XO1,YO1,ZO1)とし、センサO2の位置を地上座標系で(XO2,YO2,ZO2)とする。センサO1で撮像した画像平面801上のタイポイントa1の座標を(xa1,ya1)とし、センサO2で撮像した画像平面802上の座標をタイポイントa2の座標を(xa2,ya2)とすると、共線条件式として以下の式を得ることができる。
【数6】
つまり、タイポイント1点に対して4つの方程式が得られる。上述したように、画像サポートデータより、m11〜m33,m'11〜m'33,(XO1,YO1,ZO1),(XO2,YO2,ZO2)の値を導き出すことができ、GCPについて得られる値を代入すれば、センサ位置における(xo1,yo1),(xo2,yo2)を導き出すことができるため、未知数の個数は、地上座標系でのタイポイントの座標(XA,YA,ZA)の3個のみとなる。このため、1の冗長性を有しながら、これらの連立方程式の解として、各タイポイントの経度X、緯度Yおよび標高Zが求まる。ステップS1705において、検索されたすべてのタイポイントについて、緯度、経度および標高を求めると、ステップS1706に進む。
【0078】
ステップS1706では、最小二乗法などの逐次近似法を用いて、複数のタイポイントおよびGCPの座標から、画像データ上の全ピクセルのデジタル標高データを求める。このとき、平均二乗誤差も求められるので、求められた標高値の精度評価を同時に行なうことができる。
【0079】
ステップS1707では、標高データを用いることで、標高の低い道や、川沿いの道など、避難に適さない道を抽出し、地図の各道路にあらかじめ、津波発生時にナビゲーションすべきでない道路として属性を登録する。または、坂道や通行はできるが障害物が存在する道路などを、避難可能だが通常の道路よりも時間がかかる道路としてあらかじめ属性を登録する。さらに、過去の渋滞履歴などを利用して、渋滞しやすい道路や事故が起こりやすい道路などもあらかじめ登録しておけばよい。そのように地図標高データに詳しい属性を付加することにより、避難時のナビゲーションをより正確かつ詳細に行なうことが可能となる。
【0080】
本実施形態では、上述のようなステップS1701〜S1707で、衛星画像データから標高データを随時更新するので、より適確な避難場所および避難ルートをユーザに提示することができる。本発明によれば、生成画像データから生成した詳細な標高データを用いることで、非常に精密な津波避難ナビゲーションを行なうことができる。
【0081】
以上、本実施形態によれば、地震が起きてから津波が来るまでの時間に、各人について必要な情報を取得して解析し、精細なデジタル標高データを利用したきめ細かな避難案内を行なうことができる。
【0082】
[他の実施形態]
また、本発明は、複数の機器から構成されるシステムに適用されてもよいし、単体の装置に適用されてもよい。さらに、本発明は、実施形態の機能を実現する情報処理プログラムが、システムあるいは装置に直接あるいは遠隔から供給される場合にも適用可能である。したがって、本発明の機能をコンピュータで実現するために、コンピュータにインストールされるプログラム、あるいはそのプログラムを格納した媒体、そのプログラムをダウンロードさせるWWW(World Wide Web)サーバも、本発明の範疇に含まれる。
【技術分野】
【0001】
本発明は、津波からの避難を案内する技術に関する。
【背景技術】
【0002】
上記技術分野において、特許文献1に示されているように、精細なデジタル標高データを用いて洪水ハザードマップを生成する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−340743号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、あくまでも洪水が起こった場合の浸水状況をシミュレートするものであって、津波に対応することができなかった。
【0005】
2011年3月11日の東日本大震災の被害状況を目の当たりにすると、事前の津波ハザードマップの予測を遥かに上回る破壊力や浸水地域の広大さ、世界一の大防潮堤などの破壊でその無力さを痛感せざるを得ない。
【0006】
今後はとにかく津波警報が出た段階で、できるだけ早く安全な避難場所に全力で避難することが、命が助かるための最もよい手段であるという考え方が、専門家を含めた主要意見となってきている。
【0007】
しかし、今までは、ある地域にいるすべての人に一律に避難場所を設定していた。また、そこまでの最短ルートを避難ルートとして提示していた。このような単純なやり方では、多くの人を救うことができなかった。
【0008】
本発明の目的は、上述の課題を解決する技術を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明に係るシステムは、
津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、
避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得手段と、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得手段と、
前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、
決定した避難場所および避難ルートを提示する提示手段と、
を備えたことを特徴とする。
【0010】
上記目的を達成するため、本発明に係る方法は、
津波からの避難方法を提示するための津波避難ナビゲーション方法であって、
避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする。
【0011】
上記目的を達成するため、本発明に係るプログラムは、
津波からの避難方法を提示するための津波避難ナビゲーションプログラムであって、
避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする。
【発明の効果】
【0012】
本発明によれば、地震が起きてから津波が来るまでの時間に、各人について必要な情報を取得して解析し、精細なデジタル標高データを利用したきめ細かな避難案内を行なうことができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る津波避難ナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施形態に係る津波避難ナビゲーションシステムの動作を説明するシーケンス図である。
【図3】本発明の実施形態に係る津波避難ナビゲーションシステムの処理の流れを説明するフローチャートである。
【図4】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図5】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図6】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図7】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図8】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図9】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図10】本発明の実施形態に係る津波避難ナビゲーションシステムの動作を説明するシーケンス図である。
【図11】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図12】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図13】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図14】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図15】本発明の実施形態に係る津波避難ナビゲーションシステムの動作を説明するシーケンス図である。
【図16】本発明の実施形態に係る津波避難ナビゲーションシステムによって表示される表示画面例を示す図である。
【図17】本発明の実施形態に係るデジタル標高データ抽出処理を示すフローチャートである。
【図18】衛星によるリモートセンシングを説明する図である。
【図19】ステレオペア画像の撮像について説明する図である。
【図20】ステレオペア画像から標高を算出する方法について説明する図である。
【図21】ステレオペア画像から標高を算出する方法について説明する図である。
【図22】ステレオペア画像から標高を算出する方法について説明する図である。
【発明を実施するための形態】
【0014】
以下に、図面を参照して、本発明の実施の形態について例示的に詳しく説明する。ただし、以下の実施の形態に記載されている構成要素はあくまで例示であり、本発明の技術範囲をそれらのみに限定する趣旨のものではない。
【0015】
《前提》
多くの災害の中でも、津波には以下に示すような複数の特殊性が存在する。
(1)最も大きな特徴は、地震発生を条件とする点である。つまり、他の突発的な災害と異なり、津波が到達する時刻を予測できるため、避難にかけることができる時間が決まる。
(2)気象庁などの発表により、津波の大きさと発生位置は、瞬時に予測できる。津波の大きさと発生位置により、避難場所候補は一定範囲に絞られる。
(3)避難場所までの避難ルートを決定するにあたり、避難ルート上の各点における標高データが重要な意味をもつ。単に最短ルートを設定したのでは、避難中に津波にのまれるケースが起こりえるからである。
(4)どこに避難すべきか、どのように避難すべきかについては、各人の能力、位置および状況によっても大きく異なる。例えば老人や車いす利用者など早い歩行が困難な人、車を持っている人、集団で避難する人など、津波が来た場合に、それぞれ最適な避難場所、避難ルートは異なる。
(5)高い場所に逃げるべきという普遍的なルールが存在する。
【0016】
以上の特殊性を踏まえ、本実施形態では以下のような構成および動作を実現する津波避難ナビゲーションシステム100を提案する。
【0017】
《システム構成》
本発明の第1実施形態としての津波避難ナビゲーションシステム100について、図1を用いて説明する。津波避難ナビゲーションシステム100は、ネットワークを介して、携帯端末110や、テレビ120、カーナビゲーションシステム130、PC140、気象庁や放送局などの津波情報サーバ150および地図標高データベース160と接続されている。
【0018】
図1に示すように、津波避難ナビゲーションシステム100は、ユーザ環境情報取得部101、津波情報取得部102、地図標高データ取得部103、避難場所・避難ルート決定部105、避難ナビゲーション情報提示部106を含む。
【0019】
まず、ユーザ環境情報取得部101は、ネットワークを介して接続された各種の端末からあるいはあらかじめシステム内に用意されたユーザ情報記憶部(不図示)からユーザ環境情報を取得する。ユーザ環境情報としては、ユーザの現在地、歩行(走行)速度、車いす利用の有無、集団避難の有無など、が挙げられる。
【0020】
津波情報取得部102は、気象庁などの津波情報サーバ150から津波情報を取得する。津波情報としては、まず津波警報を取得し、その後、津波到達場所・津波到達時刻・津波高さ・津波速さなどの情報を取得する。
【0021】
地図標高データ取得部103は、地図標高データベース160から、地図標高データを取得する。地図標高データとは、ユーザの現在位置を含む地図データと、地図上の各地点の標高データとを組み合わせたデータである。図1では、地図標高データベース160を津波避難ナビゲーションシステム100の外側に表わしているが、本発明はこれに限定されるものではなく、津波避難ナビゲーションシステム100が地図標高データベース160を含んでもよい。
【0022】
避難場所・避難ルート決定部104は、ユーザ環境情報取得部101と、津波情報取得部102と、地図標高データ取得部103とから取得した情報に基づいて、避難場所および避難ルートを決定する。具体的には、ユーザの移動速度と、津波到達時刻までの時間とを積算して、避難可能距離を算出し、現在地から避難可能距離を半径とする円の中に含まれる複数の地点について、標高の高さ、海岸からの遠さ、場所の分かりやすさなどをベースに安全性を評価する。それらの地点の中で、避難場所としての評価が高いものからリストアップして避難場所候補リストを生成する。避難場所候補のそれぞれについて、避難ルートを算出する。地図標高データには、渋滞しやすい道路や、標高の低い場所や、川沿いの道など、避難に適さない道があらかじめ登録されている。したがって、それらの避難に適さない道を通らない避難ルートを生成する。各避難ルートについて、坂道や障害物の存在を考慮して避難場所まで到達するために要する時間を求める。そうして最終的に、安全でかつ最も早く到着できる避難場所およびそこまでの安全な避難ルートを決定する。避難ルートは柔軟に決定する。避難ルートとしては道路に限定されず、最短時間で避難場所まで行くため、畑の中を突っ切るルートなどを決定してもよい。そのためには、地図データ上において、畑の中や低いフェンスを越える道など、人が通れる場所か否かをあらかじめ各地点のメタデータとしてもたせて置く。一方で、渋滞履歴などを参照して、混雑する道を回避する避難ルートを決定してもよい。
【0023】
避難中に時間に余裕が生じれば、より安全な避難場所を決定して避難ルートを変更してもよい。また、複数の避難場所候補をユーザに提示して、ユーザが分かりやすい場所を選択する仕組みでもよい。
【0024】
避難ナビゲーション情報提示部106は、携帯端末110やテレビ120などのユーザ端末に対して、避難場所・避難ルート決定部104が決定した避難場所および避難ルートを含む避難ナビゲーション情報を提供する。
【0025】
なお、津波避難ナビゲーションシステム100は、ネットワーク上に存在するものに限定されない。例えば、家庭のテレビ120と接続するセットトップボックスのようなものでもよいし、カーナビゲーションシステム130の一部であってもよい。その場合、ユーザ環境情報取得部101は、ユーザやサービスマンの入力操作によってユーザ環境情報を直接取得してもよい。また、津波情報取得部102は、津波情報サーバ150としての放送局から受信したデジタル放送データを解析して、津波警報他の各種津波情報を取得してもよい。また、その場合、地図標高データベース160を津波避難ナビゲーションシステム100の一部として備えてもよい。その場合、ユーザやサービスマンの更新操作によって、定期的に地図標高データを更新すればよい。例えば、インターネットに接続可能であれば、定期的に地図標高データを更新する構成でもよいし、地方自治体などにより配布された地図DVDなどの記憶メディアから最新データをインストールする構成でもよい。
【0026】
《携帯端末またはPCへのナビゲーション情報提供》
まず、津波避難ナビゲーションシステム100が携帯端末110またはPC140に対してサービスを提供する場合について図2乃至図9を参照して説明する。
【0027】
図2は、津波からの避難誘導を行なうためのシーケンス図である。まず、大きな規模の地震が起こると、津波情報サーバ150は、ステップS201において、津波警報を発令して、ステップS203において、津波情報を生成する。津波情報としては、津波到達場所・津波到達時刻・津波高さ・津波速さが含まれる。
【0028】
津波避難ナビゲーションシステム100は、ステップS211において津波警報を受信すると、津波情報を受信する準備を行ない、ステップS212において津波情報を取得する。
【0029】
一方携帯端末110では、ステップS211において津波警報を受信して、ユーザに対して津波が来る旨を通知すると同時にステップS222において、津波避難アプリケーションを起動する。携帯端末110はこのアプリケーションの起動を自動で行なってもよいが、ユーザに対して「津波避難アプリケーションを起動しますか?」といったメッセージを表示して確認してから起動してもよい。
【0030】
携帯端末110において津波避難アプリケーションが起動されるとあらかじめ設定されたアドレス(津波避難ナビゲーションシステムのアドレス)に対して、ユーザ環境情報を送信する。
【0031】
津波避難ナビゲーションシステム100は、ステップS213において、ユーザ環境情報を受信すると、ステップS214に進み、ユーザの現在地の周囲の地図標高データを地図標高データベース160から読出す。
【0032】
そして、ステップS215において、津波避難ナビゲーションシステム100は、避難場所および避難ルートを決定する。
【0033】
最後に津波避難ナビゲーションシステム100が、避難ナビゲーション情報を携帯端末110に送信すると(S216)、携帯端末110では、受信した避難ナビゲーション情報が表示される(S224)。
【0034】
次に避難場所および避難ルートの決定方法について図3のフローチャートを用いて説明
する。
【0035】
まず、ステップS301において、ユーザ環境情報を用いて、避難可能距離を算出する。具体的には、避難時の歩行速度や走行速度に、現在時刻から津波到達時刻までの時間を積算する。
【0036】
次にステップS302において、ユーザの現在位置を中心として、避難可能距離を半径とする円を、地図上に描く。その円の中に存在する複数の地点の中で、標高が津波高さよりも十分に大きい地点を選択する。選択された地点の中で、標高が高いものから順に並べて避難場所候補リストを生成する。津波高さより十分に標高が高い地点であれば、海岸から遠い地点、ユーザの現在地から近い地点、知名度の高い地点(スーパー、市役所、学校、病院、駅など)を評価の高い避難場所候補とする。つまり、複数の地点について、標高の高さ、海岸からの遠さ、場所の分かりやすさなどをベースに点数を加算して、総合的に避難のしやすさおよび安全性を評価する。それらの地点の中で、避難場所としての評価が高いものからリストアップして避難場所候補リストを生成する。
【0037】
次に、ステップS303において、避難場所候補のそれぞれについて、避難ルートを生成し、ステップS304において、避難場所および避難ルートを評価する。地図標高データには、渋滞しやすい道路や、標高の低い場所や、川沿いの道や、海岸線から延びた道路など、避難に適さない道があらかじめ登録されている。したがって、それらの避難に適さない道を通らない避難ルートを生成する。避難に適さない道を通らない避難ルートのなかで、避難にかかる予想時間の小さいルート、避難が容易なルートを選択する。予想時間を求めるにあたり、やはり標高データを用いて、坂道などを考慮に入れることが望ましい。推奨避難ルートは時間の経過と共に変化する。そのため、避難開始処理を行なわない限り、避難ルートを随時更新する。地震から経過する時間に応じて通れる道の選択肢が少なくなる。最後に、ステップS305において、評価の高い避難場所および避難ルートを決定する。
【0038】
図4乃至図9は、津波避難ナビゲーションシステム100によって、携帯端末110のディスプレイに表示される画面例を示す図である。図4は、大津波警報が発令された場合の画面例400を示している。震源地、震源深さ、地震規模の他、津波高さや津波到達時刻に関する情報を表示している。さらに現在地と、避難に用いることのできる時間および最短避難場所までの所要時間を表示する。ここでナビボタンを選択すると、図5の画面が表示される。
【0039】
図5は、現在地からの避難場所および避難ルートを2次元的に表示するナビゲーション画面例500を示す図である。このように本実施形態では、通るべきでない避難路を明示する。
【0040】
図6は、現在地からの避難場所および避難ルートを3次元的に立体表示するナビゲーション画面例600を示す図である。また、この画面600では、現在時刻の他、目的地到着予想時刻、津波到達時刻、目的地までの距離、進むべき方向などを表示する。2次元的に表示する下側の画面では、ランドマークとなる建物および経路を表示する。
【0041】
図7は、交差点にさしかかった場合の、ナビゲーション画面例700を示す図である。一般のカーナビゲーションシステムと異なり、進んではいけない道路を明確に表示する。さらには、津波到達までの時間、最短避難場所までの所要時間を表示する。
【0042】
図8は、避難場所に到着した際に表示される画面例800を示す図である。一方、図9は、推奨する避難場所への避難が困難(間に合わない)と判断した場合に表示される画面例900を示す図である。
【0043】
《カーナビゲーションシステムへのナビゲーション情報提供》
まず、津波避難ナビゲーションシステム100がカーナビゲーションシステム130に対してサービスを提供する場合について図10乃至図14を参照して説明する。図10において、図2で説明したものと同じ処理について同じ符号を付してここでは詳細な説明を省略する。カーナビゲーションシステム130を利用する場合、津波情報サーバ150からの津波警報は、車内システム全体として受信する(S1011)。カーナビゲーションシステム130は、津波警報を受信すると津波避難アプリケーションを起動する(S1022)。
【0044】
カーナビゲーションシステム130は、津波避難アプリケーションを起動すると、ユーザ環境情報を津波避難ナビゲーションシステム100に渡す。ここでのユーザ環境情報は、車両位置、走行速度、渋滞情報などである。津波避難ナビゲーションシステム100は、ユーザ環境情報を取得する(S213)
次に、カーナビゲーションシステム130は、地図標高データを津波避難ナビゲーションシステム100に渡す。カーナビゲーションシステム130は通常地図データを有しているため、標高データのみ、別に津波避難ナビゲーションシステム100が保有していてもよい。
【0045】
津波避難ナビゲーションシステム100は、取得した情報に基づいて、避難場所および避難ルートを決定する(S215)。その際、車両を降りて歩くべきタイミングも含めてカーナビゲーションシステム130に通知する。例えば道路が渋滞している場合、津波が近づいている場合、道を間違えてUターンできない場合など、車両から降りて歩くルートを決定する。その場合ステップS216では、車両から降りて歩くように促すメッセージをカーナビゲーションシステム130に提供する。カーナビゲーションシステム130は、津波避難ナビゲーションシステム100から取得した情報を基に避難ナビゲーション情報を表示する。また、間違った道を選択しないように警告するメッセージや、あるいは間違った道を選択したことを警告するメッセージなどを表示させる。
【0046】
なお、ここでは、車内に津波避難ナビゲーションシステム100を設けた例を示したが、本発明はこれに限定されない。車内のナビゲーションシステムが車外ネットワークと繋がっている場合には、車外ネットワーク上に津波避難ナビゲーションシステム100を設け、無線通信などで避難ナビゲーション情報をカーナビゲーションシステム130に送信すればよい。その場合、渋滞回避のために、同時刻に、同位置に所定台数以上の車が走らないように、各車両のカーナビゲーションシステム130に対して調整して案内することが可能となる。例えば第1候補の避難ルートを選択した車両が一定数に達した場合には、他の車両に対しては第2候補の避難ルートを提示するなどの調整方法が考えられる。
【0047】
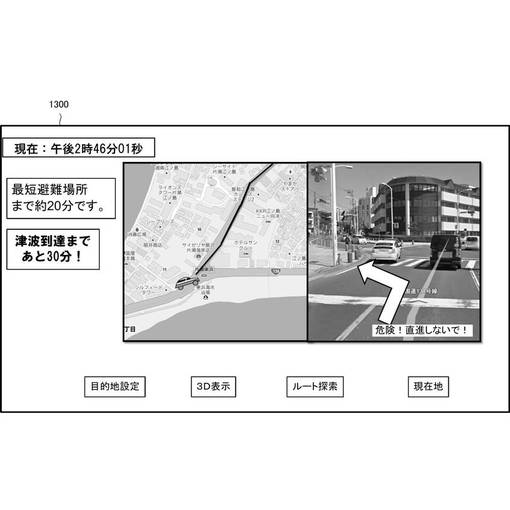
図11乃至図14は、津波避難ナビゲーションシステム100によって、携帯端末110のディスプレイに表示される画面例1100〜1400を示す図である。図11は、大津波警報が発令された場合の画面例1100を示している。警報発令を通知するメッセージの他、震源地、震源深さ、地震規模の他、推定津波高さや推定津波到達時刻に関する情報を表示している。さらに、避難に用いることのできる時間および最短避難場所までの所要時間を表示する。ここでルート探索ボタンを選択すると、図12〜図14の画面が表示される。
【0048】
図12は、現在地から目指すべき避難場所および避難ルートを2次元的に表示するナビゲーション画面例1200を示す図である。また、この画面1200では、現在時刻の他、目的地到着予想時刻、津波到達時刻、目的地までの距離、進むべき方向などを表示してもよい。さらに、この画面において、絶対に走行すべきではない道や領域を警告表示する。
【0049】
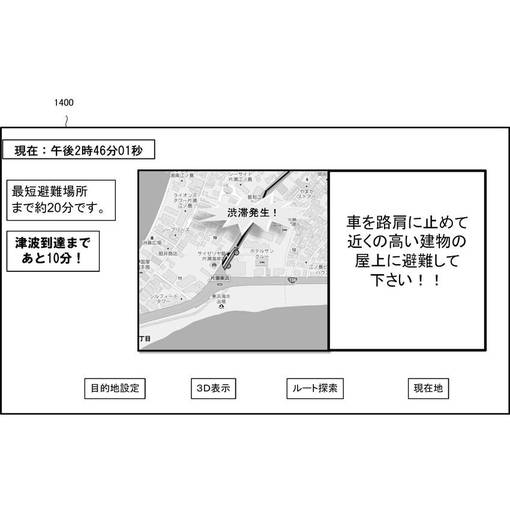
図13は、交差点にさしかかった場合の、ナビゲーション画面例1300を示す図である。一般のカーナビゲーションシステムと異なり、進んではいけない道路を明確に表示する。さらには、津波到達までの時間、最短避難場所までの所要時間を表示する。図14は、車から降りるべきメッセージが表示された画面例1400を示す図である。
【0050】
《テレビ受像器へのナビゲーション情報提供》
まず、津波避難ナビゲーションシステム100がテレビ120に対してサービスを提供する場合について図15、図16を参照して説明する。この場合、津波避難ナビゲーションシステム100は、テレビ120に直接接続されるセットトップボックスである。あらかじめ地方自治体が作成した集落単位の津波避難経路詳細地図と、テレビ120が設置されたユーザ住所を記憶している。これらの情報は、ユーザ自身、市の職員、または電気店の店員などが登録すればよい。
【0051】
ここでの津波避難ナビゲーションシステム100は、テレビ局からの放送データを分析することにより津波警報や津波情報を取得する(S1511、S1512)。津波避難ナビゲーションシステム100は、津波警報を受信すると、テレビ120の電源を強制的に投入して、津波避難ナビゲーションシステム100からの画面を表示させる処理を行なってもよい。
【0052】
ステップS1513では、津波避難ナビゲーションシステム100内にあらかじめ登録されたテレビ設置位置や、ユーザの歩行速度、車いすの有無などを取得する。そして、ステップS1514でも同様に、津波避難ナビゲーションシステム100内にあらかじめ登録された地図標高データを取得する。
【0053】
そして、ステップS215では、図3を用いて説明したとおり、避難場所および避難ルートを決定し、最後に、テレビ120に対して、避難ナビゲーション情報を表示させる(S1524)。
【0054】
図16は、現在地から目指すべき避難場所および避難ルートを2次元的にテレビ120に表示した場合のナビゲーション画面例1600を示す図である。また、この画面1600では、現在時刻の他、目的地到着予想時刻、津波到達時刻、目的地までの距離、進むべき方向、分かりやすいランドマークとなる建物などを表示してもよい。さらに、この画面において、絶対に走行すべきではない道や領域を警告表示してもよい。
【0055】
以上に説明したような、津波避難ナビゲーションシステム100を用いて、避難訓練を行なってもよい。その場合、津波到着予想時刻やその規模などを設定して地域全体で同時に訓練を行なうことが望ましい。避難訓練時のユーザの動作データ、移動データなどを津波避難ナビゲーションシステムに蓄積していくことで、避難場所および避難ルートをより精度良く決定可能となる。避難訓練を地域一帯で行なうことによって、実際に起きた時の混雑状況が予測できる。津波がどの時間帯に到達したかに応じて、避難場所や避難ルートを変更することが望ましい。例えば、夜の場合には、分かりやすい幹線道路を通って避難するように避難ルートを決定する。
【0056】
《地図標高データの生成処理》
次に、図17のフローチャートを用いて、地図標高データの生成処理について説明する。本実施形態では、上述の避難ナビゲーションの前提として以下の様な処理の流れによって地図標高データを生成する。この生成処理は、例えば一月に1度などの頻度で定期的に行なっても良いし、或いは、津波警報発令を受けて最新の衛星画像データを衛星画像DBから取得して、そのタイミングで地図標高データを生成してもよい。
【0057】
地図標高データの生成のための最初の処理として、ステップS1701において、衛星画像データを入力する。ステップS1701で入力される衛星画像データは、QuickBird衛星によってリモートセンシングされた画像データであり、放射補正、およびセンサ補正がなされたものである。ここで、放射補正とは、センサ素子間の相対放射反応、非反応検知センサ素子の補填、および絶対放射測定に対する補正である。またセンサ補正とは、センサ内部構造、光学ひずみ、走査ひずみなどを考慮した補正である。
【0058】
衛星によるリモートセンシングの様子を図18に示す。QuickBird衛星などの撮像衛星は、衛星軌道1801上を矢印方向に秒速約8kmの速度で移動しながら、ラインセンサにより地表面1802をリモートセンシングする。衛星に搭載されたラインセンサは、地表面1802から受信した電磁波をイメージプレーン1803に投影してデジタルデータとして保存する。そしてこのデジタルデータに対し、放射補正およびセンサ補正を行ったものがステップS1701で入力される。QuickBird衛星の場合、リモートセンシングされた画像データの空間分解能は約61cm(直下点) から72cm(25度オフナディア角)であり、一度に約16.5km四方の地表面の画像を取込むことができる。
【0059】
ステップS1701では、このようにリモートセンシングされた画像データが、少なくとも2種類用意される。それらは、異なる位置にある衛星のセンサ、または、一つの衛星に設けられた異なるセンサから同じ地域をリモートセンシングすることにより得られた画像データである。その関係を図19に示す。1901および1902が衛星の軌道であり、1903が地表面である。1904が撮像対象領域である。QuickBird衛星を用いる場合には、1つの衛星で異なる軌道上から同じ地域を撮像することが可能であるが、それぞれ異なる衛星から同じ地域を撮像してもよい。なお、QuickBird衛星は南北に周回する衛星であるから、その軌道は東西にずれたものとなる。また、QuickBird衛星などの商用衛星では、衛星が1つの軌道を北から南に移動する間にセンサの向きを変更し同一の領域をほぼ同時に2方向から撮像しステレオペア画像を取得する機能がある。この機能を利用した場合には、図19の1901および1902は、同一の軌道上の異なる時間の衛星位置を示すことになる。
【0060】
なお、ステップS1701では、画像データのみならず、画像サポートデータ(ISD)が入力される。画像サポートデータには、少なくともその画像を撮像した衛星の位置および時刻の情報が含まれている。画像サポートデータとしては、例えば、姿勢データ(最初のデータ点の時刻、点数、点間隔と姿勢情報)、衛星軌道暦データ(最初のデータ点の時刻、点数、点間隔と衛星軌道情報)、幾何補正データ(衛星のセンサおよび光学系をモデル化した仮想カメラモデルの写真測量用のパラメータ:焦点距離、中心軸座標など)、画像メタデータ(製品のレベル、画像4隅の座標値(緯度、経度)、地図投影法の情報を含む画像製品などの主要な属性と、画像取得時刻)、RPC(RAPID POSITIONING CAPABILITY EXTENSION FORMAT)データ(空間の4隅の座標値と画像の4隅の座標値とを数学的に対応させるデータ)が挙げられる。
【0061】
ステップS1701で入力する衛星画像データは、センサ補正がなされているので、衛星・センサの機構が起因する歪みは補正されているが、センサの移動や地球の自転による歪みが含まれている。そこで、ステップS1702において、そのような歪みを補正する。この補正を狭義の幾何補正と称する。ステップS1702では、さらに、衛星センサの焦点距離や視野角などの幾何学特性パラメータを用いて、ピクセル座標から衛星座標への変換係数を幾何学的に決定する。
【0062】
図20は、そのような座標変換について説明する図である。入力された衛星画像データは、画像データ格納領域において、Aを原点として、XF方向(列方向)にセンサの撮像素子ごとのデータが格納され、YF方向(行方向)にラインごとのデータが格納されている。ステップS1702では、このように格納されたデータを、Cを原点とするxy座標に変換する。ここでCは、撮像領域の中心点である。
【0063】
次に、ステップS1703において、GCPの設定を行い、ステップS1704において、空中三角測量を行なう。GCPには、三角点、水準点、もしくは、測量により得られた地点の座標、標高などが用いられる。日本国内の場合、25000分1の地形図が容易に入手できるので、交差点などの緯度経度、およびおよその標高を読み取りその値をGCPとして用いることができる。
【0064】
空中三角測量とは、衛星のラインアレイセンサで撮像された平面画像上の座標と地上座標系との関係を、センサ中心と、画像上のGCPの座標と、地上におけるGCPの位置が一直線上にあるという、共線条件を用いて解析する測量をいう。
【0065】
図21は、空中三角測量について説明する図である。図21において、衛星座標系(x,y,z)は、センサ位置Oを原点とし、センサの撮像方向をz軸とする座標系である。また、地上座標系(X,Y,Z)は、緯度、経度、標高が共に0の点を原点とし、東をX軸に、北をY軸に、基準標高面と垂直を成す方向をZ軸にもつ座標系である。なお、測量学では、通常X軸を北、Y軸を東とする座標系を用いているが、図21では、X軸を東、Y軸を北、Z軸を鉛直上方とした右手座標系を用いている。
【0066】
ここで、センサ位置Oを通る地上座標系と平行な座標系を(x',y',z')とすると、座標系(x',y',z')は、衛星座標系をx軸、y軸、z軸まわりに所定角度だけ回転させた座標系なので、それぞれの軸周りの回転角度をそれぞれ(ω、ψ、κ)とすれば、これらの座標系の変換式は、以下の式で表すことができる。
【数1】
ここで、
【数2】
であり、
m11=cosψ×cosκ
m12=−cosψ×cosκ
m13=sinψ
m21=cosω×sinκ+sinω×sinψ×cosκ
m22=cosω×cosκ−sinω×sinψ×sinκ
m23=sinω×cosψ
m31=sinω×sinκ−cosω×sinψ×cosκ
m32=sinω×cosκ+cosω×sinψ×sinκ
m33=cosω×cosψ
である。
【0067】
したがって、衛星座標系と地上座標系のスケール変換率をkとすると、衛星座標系と地上座標系の関係は、
【数3】
となる。
【0068】
また、図21において、地表面上の点Pの座標を、地上座標系で(XP,YP,ZP)とし、点Pを撮像した時点のセンサ位置Oの座標を、地上座標系で(XO,YO,ZO)とする。さらに、点Pの投影点pの、画像データ上の座標を(xP,yP)とする。画像データ上の原点oは、衛星座標系において、焦点距離fを用いて、(−xo,−yo,−f)で表すことができるので、点Pの投影点pは、衛星座標系において、(xP−xo,yP−yo,−f)と表される。
【0069】
このとき、OとpとPは一直線上に存在するので、
【数4】
という関係式を得ることができる。
【0070】
この式を展開すると、以下の共線条件式が得られる。
【数5】
この式は、任意の地上の点Pについて成り立つが、GCPを対象物とした場合、(XP,YP,ZP)と、(xP,yP)は既知であり、さらに、焦点距離fも既知であるため、センサ位置(XO,YO,ZO)およびセンサの撮像方向(ω、ψ、κ)ならびに、(xo,yo)の関係が得られることになる。
【0071】
ところで、QuickBird衛星などのセンサ位置(XO,YO,ZO)およびセンサの撮像方向(ω、ψ、κ)(これらをまとめて評定要素と称する)は、上述の画像サポートデータとして、ある程度まで提供されている。例えば、QuickBird衛星の場合、20μsecごとの評定要素が提供されている。20μsecは、約200スキャンラインに対応するため、各スキャンラインの評定要素は、提供された評定要素から補間する必要がある。衛星の軌道は時間によって変化するが安定しているので、評定要素の変化は小さくまたスムーズである。各スキャンラインの評定要素は、以下のような3次の多項式を用いて表すことができる。
XO(t)=a0+a1t+a2t2+a3t3
YO(t)=b0+b1t+b2t2+b3t3
ZO(t)=c0+c1t+c2t2+c3t3
ω(t)=d0+d1t+d2t2+d3t3
ψ(t)=e0+e1t+e2t2+e3t3
κ(t)=f0+f1t+f2t2+f3t3
ここでa0、a1、a2、a3などのすべての係数は、画像サポートデータとして提供される評定要素から解析的に算出できる。また、点Pの画像pを取得した時刻tも画像サポートデータから導くことができる。これにより、先の共線条件式の右辺が一意に定まり、1つのGCPのデータから、(xo,yo)が求まることになる。上述したように、上記共線条件式は地表面上の任意の点について成り立つので、ステップS1701で入力した衛星画像データにおいて、対象物の画像の座標(x,y)が分かれば、経度Xと緯度Yと標高Zの関係を示す一次関係式が2つ求まることになる。
【0072】
なお、複数のGCPについて、上述の共線条件式を適用した場合、評定要素や、GCPの計測に含まれる誤差により、右辺と左辺がわずかではあるが一致していない場合がある。その場合、両辺の残差を0に近づけるように逐次緩和法を用いて各係数を調整することで、係数の精度を上げることができる。
【0073】
次に、ステップS1705において、タイポイントの設定およびステレオマッチングを行なう。タイポイントとは、複数の衛星画像データにおいて同一の地上の対象物(交差点、特徴的な建造物など)を表した対応点である。ステレオマッチングとは、2つの衛星画像データにおいて、タイポイントの座標比較を行なう処理である。
【0074】
タイポイントは、2枚の画像を見比べることによりオペレータが設定してもよいが、基本的には画像処理プログラムにより自動的に求められる。2枚の画像データからそれぞれ小さな窓領域(例えば7×7ピクセル程度)を抽出し、最も類似度の高い領域同士を探しだし、タイポイントとして定義することが可能である。このようにタイポイントを設定することにより、2つの画像データを対応付けることができる。
【0075】
ステレオマッチングにより2つの画像データにおける同じタイポイントの座標が導き出されると、その位置のずれから標高を算出することができる。2つの衛星画像により、同一地域について、取得したステレオ画像間では、対応する地表物の位置は、基準標高からの差の分だけ位置ずれ(視差)を生じている。この位置ずれを計測することにより、逆に基準標高からの差、すなわち標高を求めることができる。
【0076】
図22を用いて、複数の衛星画像を用いて標高データを導き出す方法について詳しく説明する。図22は、異なる位置のセンサO1,O2から同一の対象物(タイポイント)Aを撮像したときの衛星画像上の点a1,a2とタイポイントの経度XA、緯度YA、標高ZAの関係を示す図である。
【0077】
センサO1の位置を地上座標系で(XO1,YO1,ZO1)とし、センサO2の位置を地上座標系で(XO2,YO2,ZO2)とする。センサO1で撮像した画像平面801上のタイポイントa1の座標を(xa1,ya1)とし、センサO2で撮像した画像平面802上の座標をタイポイントa2の座標を(xa2,ya2)とすると、共線条件式として以下の式を得ることができる。
【数6】
つまり、タイポイント1点に対して4つの方程式が得られる。上述したように、画像サポートデータより、m11〜m33,m'11〜m'33,(XO1,YO1,ZO1),(XO2,YO2,ZO2)の値を導き出すことができ、GCPについて得られる値を代入すれば、センサ位置における(xo1,yo1),(xo2,yo2)を導き出すことができるため、未知数の個数は、地上座標系でのタイポイントの座標(XA,YA,ZA)の3個のみとなる。このため、1の冗長性を有しながら、これらの連立方程式の解として、各タイポイントの経度X、緯度Yおよび標高Zが求まる。ステップS1705において、検索されたすべてのタイポイントについて、緯度、経度および標高を求めると、ステップS1706に進む。
【0078】
ステップS1706では、最小二乗法などの逐次近似法を用いて、複数のタイポイントおよびGCPの座標から、画像データ上の全ピクセルのデジタル標高データを求める。このとき、平均二乗誤差も求められるので、求められた標高値の精度評価を同時に行なうことができる。
【0079】
ステップS1707では、標高データを用いることで、標高の低い道や、川沿いの道など、避難に適さない道を抽出し、地図の各道路にあらかじめ、津波発生時にナビゲーションすべきでない道路として属性を登録する。または、坂道や通行はできるが障害物が存在する道路などを、避難可能だが通常の道路よりも時間がかかる道路としてあらかじめ属性を登録する。さらに、過去の渋滞履歴などを利用して、渋滞しやすい道路や事故が起こりやすい道路などもあらかじめ登録しておけばよい。そのように地図標高データに詳しい属性を付加することにより、避難時のナビゲーションをより正確かつ詳細に行なうことが可能となる。
【0080】
本実施形態では、上述のようなステップS1701〜S1707で、衛星画像データから標高データを随時更新するので、より適確な避難場所および避難ルートをユーザに提示することができる。本発明によれば、生成画像データから生成した詳細な標高データを用いることで、非常に精密な津波避難ナビゲーションを行なうことができる。
【0081】
以上、本実施形態によれば、地震が起きてから津波が来るまでの時間に、各人について必要な情報を取得して解析し、精細なデジタル標高データを利用したきめ細かな避難案内を行なうことができる。
【0082】
[他の実施形態]
また、本発明は、複数の機器から構成されるシステムに適用されてもよいし、単体の装置に適用されてもよい。さらに、本発明は、実施形態の機能を実現する情報処理プログラムが、システムあるいは装置に直接あるいは遠隔から供給される場合にも適用可能である。したがって、本発明の機能をコンピュータで実現するために、コンピュータにインストールされるプログラム、あるいはそのプログラムを格納した媒体、そのプログラムをダウンロードさせるWWW(World Wide Web)サーバも、本発明の範疇に含まれる。
【特許請求の範囲】
【請求項1】
津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、
避難すべきユーザの現在位置情報を少なくとも取得するユーザ情報取得手段と、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、
前記ユーザの周囲の地図と該地図上の地点の標高を表わす地図標高データとを取得する地図標高データ取得手段と、
前記津波情報と前記地図標高データと前記現在位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、
決定した避難場所および避難ルートを提示する提示手段と、
を備えたことを特徴とする津波避難ナビゲーションシステム。
【請求項2】
前記ユーザ情報取得手段は、さらに、ユーザの歩行または走行速度を取得し、
前記決定手段は、津波到達までの時間と前記ユーザの歩行または走行速度とを用いて、避難可能距離を算出することを特徴とする請求項1に記載の津波避難ナビゲーションシステム。
【請求項3】
前記決定手段は、
前記ユーザの現在位置からの前記避難可能距離内において、標高データが前記津波の高さよりも高い地点を避難場所として決定することを特徴とする請求項1または2に記載の津波避難ナビゲーションシステム。
【請求項4】
前記決定手段は、
前記避難ルートを決定する際に、標高が低い地点を通らない避難ルートを決定することを特徴とする請求項1乃至3のいずれか1項に記載の津波避難ナビゲーションシステム。
【請求項5】
前記決定手段は、
前記地図標高データを用いて、前記避難場所までに歩行または走行できる近道ルートが存在するか否か判定し、歩行または走行できる近道ルートが存在する場合には、前記地図上の道路か否かに拘わらず前記近道ルートを前記避難ルートとして決定することを特徴とする請求項1乃至4のいずれか1項に記載の津波避難ナビゲーションシステム。
【請求項6】
津波からの避難方法を提示するための津波避難ナビゲーション方法であって、
避難すべきユーザの現在位置情報を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記現在位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする津波避難ナビゲーション方法。
【請求項7】
津波からの避難方法を提示するための津波避難ナビゲーションプログラムであって、
避難すべきユーザの現在位置情報を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記現在位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする津波避難ナビゲーションプログラム。
【請求項1】
津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、
避難すべきユーザの現在位置情報を少なくとも取得するユーザ情報取得手段と、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、
前記ユーザの周囲の地図と該地図上の地点の標高を表わす地図標高データとを取得する地図標高データ取得手段と、
前記津波情報と前記地図標高データと前記現在位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、
決定した避難場所および避難ルートを提示する提示手段と、
を備えたことを特徴とする津波避難ナビゲーションシステム。
【請求項2】
前記ユーザ情報取得手段は、さらに、ユーザの歩行または走行速度を取得し、
前記決定手段は、津波到達までの時間と前記ユーザの歩行または走行速度とを用いて、避難可能距離を算出することを特徴とする請求項1に記載の津波避難ナビゲーションシステム。
【請求項3】
前記決定手段は、
前記ユーザの現在位置からの前記避難可能距離内において、標高データが前記津波の高さよりも高い地点を避難場所として決定することを特徴とする請求項1または2に記載の津波避難ナビゲーションシステム。
【請求項4】
前記決定手段は、
前記避難ルートを決定する際に、標高が低い地点を通らない避難ルートを決定することを特徴とする請求項1乃至3のいずれか1項に記載の津波避難ナビゲーションシステム。
【請求項5】
前記決定手段は、
前記地図標高データを用いて、前記避難場所までに歩行または走行できる近道ルートが存在するか否か判定し、歩行または走行できる近道ルートが存在する場合には、前記地図上の道路か否かに拘わらず前記近道ルートを前記避難ルートとして決定することを特徴とする請求項1乃至4のいずれか1項に記載の津波避難ナビゲーションシステム。
【請求項6】
津波からの避難方法を提示するための津波避難ナビゲーション方法であって、
避難すべきユーザの現在位置情報を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記現在位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする津波避難ナビゲーション方法。
【請求項7】
津波からの避難方法を提示するための津波避難ナビゲーションプログラムであって、
避難すべきユーザの現在位置情報を少なくとも取得するユーザ情報取得ステップと、
到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得ステップと、
前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得ステップと、
前記津波情報と前記地図標高データと前記現在位置情報とを用いて、避難場所および避難ルートを決定する決定ステップと、
決定した避難場所および避難ルートを提示する提示ステップと、
を含むことを特徴とする津波避難ナビゲーションプログラム。
【図1】

【図2】
【図3】
【図4】
【図10】
【図11】
【図15】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図13】
【図14】
【図16】

【図2】
【図3】
【図4】
【図10】
【図11】
【図15】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図13】
【図14】
【図16】
【公開番号】特開2012−252614(P2012−252614A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−125882(P2011−125882)
【出願日】平成23年6月4日(2011.6.4)
【特許番号】特許第4902899号(P4902899)
【特許公報発行日】平成24年3月21日(2012.3.21)
【出願人】(503176550)株式会社アイエスエム (9)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月4日(2011.6.4)
【特許番号】特許第4902899号(P4902899)
【特許公報発行日】平成24年3月21日(2012.3.21)
【出願人】(503176550)株式会社アイエスエム (9)
【Fターム(参考)】
[ Back to top ]