
流体回転機械の診断方法
【課題】 統一的な判定基準の設定が可能な高精度の流体回転機械の診断方法を提供する。
【解決手段】 予め回転部に機械要素を有する流体回転機械11の正常時に流体回転機械11の状態を示す複数の状態信号からなる第1の状態信号群を所定時間間隔でそれぞれ測定して有次元の第1の状態データ群を得た後、流体回転機械11の点検時に流体回転機械11の状態を示す複数の状態信号からなる第2の状態信号群を所定時間間隔でそれぞれ測定して有次元の第2の状態データ群を得て、第1及び第2の状態データ群をそれぞれ無次元の第1及び第2のパラメータ群に変換した時系列の第1及び第2のマトリックスを作成し、第1及び第2のマトリックスを1つの多変量カルバック・ライブラー情報量として算出して、流体回転機械11の状態を判断する。
【解決手段】 予め回転部に機械要素を有する流体回転機械11の正常時に流体回転機械11の状態を示す複数の状態信号からなる第1の状態信号群を所定時間間隔でそれぞれ測定して有次元の第1の状態データ群を得た後、流体回転機械11の点検時に流体回転機械11の状態を示す複数の状態信号からなる第2の状態信号群を所定時間間隔でそれぞれ測定して有次元の第2の状態データ群を得て、第1及び第2の状態データ群をそれぞれ無次元の第1及び第2のパラメータ群に変換した時系列の第1及び第2のマトリックスを作成し、第1及び第2のマトリックスを1つの多変量カルバック・ライブラー情報量として算出して、流体回転機械11の状態を判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、正常時と点検時の状態を比較して流体回転機械を診断する方法に関する。
【背景技術】
【0002】
従来、真空ポンプ、送風機、又は圧縮機等の流体回転機械の機械要素である歯車、ベアリング、又はロータ等の状態診断には、音響、視覚、及び触覚等のいずれか1又は2以上の機械的(五感及び電気的に測定したものも含む)な兆候による方法、電圧量及び電流量等のいずれか1又は2以上の変化による電気的な兆候による方法、及び潤滑油中の金属屑等の異物の分析による方法等が知られている。また、流体回転機械のケーシングに取付けられた加速度センサ等で検知した振動の振動信号等から得られる1変量のパラメータによる診断方法も知られている(例えば、非特許文献1参照)。
【0003】
【非特許文献1】劉信芳、他4名、「対称型カルバック情報量による回転機械の異常診断」、日本設備管理学会誌、1998、第10巻、第3号、p.22−27
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、流体回転機械の状態を機械的な兆候による方法、電気的な兆候による方法、又は潤滑油の分析による方法等によって解析する場合には、測定値が流体回転機械の使用状況等によって大きくばらつくため、流体回転機械の状態の判断が困難であり、異常の早期発見が難しかった。また、同一の流体回転機械であっても測定点又は測定する人等が異なると判定基準が異なっていた。更に、異なった流体回転機械ではそれぞれに判定基準を設定しなければならなかった。また、非特許文献1に記載された方法では、1変量によって診断しているので診断精度が低かった。
【0005】
本発明はかかる事情に鑑みてなされたもので、統一的な判定基準の設定が可能な高精度の流体回転機械の診断方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的に沿う請求項1記載の流体回転機械の診断方法は、予め回転部に機械要素を有する流体回転機械の正常時に該流体回転機械の状態を示す複数の状態信号からなる第1の状態信号群を所定時間間隔でそれぞれ測定して有次元の第1の状態データ群を得た後、前記流体回転機械の点検時に該流体回転機械の状態を示す複数の状態信号からなる第2の状態信号群を所定時間間隔でそれぞれ測定して有次元の第2の状態データ群を得る第1工程と、
前記第1の状態データ群をそれぞれ無次元の第1のパラメータ群に変換した時系列の第1のマトリックスと、前記第2の状態データ群をそれぞれ無次元の第2のパラメータ群に変換した時系列の第2のマトリックスとをそれぞれ作成する第2工程と、
前記第1及び第2のマトリックスを1つの多変量カルバック・ライブラー情報量として算出する第3工程と、
前記多変量カルバック・ライブラー情報量によって前記流体回転機械の状態を判断する第4工程とを有し、
前記流体回転機械の正常時の状態信号と点検時の状態信号とを比較して前記回転機械の異常を検知する。
【0007】
請求項1記載の流体回転機械の診断方法において、真空ポンプ、送風機、又は圧縮機等の流体回転機械の回転部には、歯車、ベアリング、及びロータ等の1又は2以上が含まれる。また、流体として液体又は気体を使用することができる。流体回転機械の状態信号としては、流体回転機械の振動の変位、速度、及び加速度等の1又は2以上を検知した信号、すなわち、振動信号、流体回転機械の回転部を回転させるモータ等の電流及び電圧の一方又は双方を検知した信号、すなわち、電気信号、流体回転機械から排出する気体の温度を検知した信号、すなわち、温度信号、流体回転機械で吸引した空間の圧力を検知した信号、すなわち、圧力信号、流体回転機械を冷却する冷却水の流量及び温度の一方又は双方を検知した信号、及び、流体回転機械に供給するガスの流量及び温度の一方又は双方を検知した信号等があり、これらの複数の状態信号からなる状態信号群を所定時間間隔、例えば、20μ秒間〜0.1秒間間隔、つまりサンプリング周波数10Hz〜50kHzで測定する。
【0008】
流体回転機械の正常時及び点検時に測定した第1及び第2の状態信号群は、それぞれのアナログの状態信号がデジタルの状態データに変換されて、それぞれ有次元の第1及び第2の状態データ群が得られる。また、第1及び第2の状態データ群は、それぞれ第1及び第2の無次元のパラメータ群に変換される。ここで、例えば、温度信号の有次元の状態データの場合には、所定時間間隔毎の温度の変化率(無次元)に変換することができる。更に、第1及び第2の複数の無次元のパラメータ群から、それぞれ第1及び第2の時系列のマトリックスが作成される。
【0009】
ここで、多変量カルバック・ライブラー情報量(Multivariate Kullback-Leibler Infomation、以下、MKIともいう)は、経済統計学等に使用される統計理論であって、(1)式で示される。ここで、fR は正常時(Reference 、R)の複数状態データの分布、fT は点検時(Test、T)の複数状態データの分布を示し、それぞれのx1 〜xk は有次元の振動データから変換された複数(k個)のパラメータを示す。
【0010】
μR 及びμT はそれぞれのx1 〜xk のk変量の平均値ベクトルであり、SR 及びST はそれぞれのx1 〜xk 及び、μR 又はμT から求められるk変量の共分散マトリックスである。μR 、μT 、SR 、及びST については、後で詳しく述べる。多変量カルバック・ライブラー情報量は、正常時の複数状態データの分布と点検時の複数状態データの分布との差異を示し、この値によって流体回転機械の異常を検知することができる。
【0011】
【数1】

【0012】
正常時及び点検時の状態データをそれぞれ複数の無次元のパラメータ(x1 〜xk )に変換した時系列の第1及び第2のマトリックスXI を(2)式に示し、x1 〜xk のそれぞれの平均値(μ1 〜μk )からなる平均マトリックスμI を(3)式に示す。なお、Iは、R又はTである(以下同様)。
【0013】
【数2】
【0014】
【数3】
【0015】
【数4】
【0016】
ここで、(2)式及び(3)式から、(4)式に示される正常時及び点検時の共分散マトリックスSI をそれぞれ求め、μR 、SR 、μT 、ST を(1)式に代入して、多変量カルバック・ライブラー情報量MKIを算出する。算出されたMKIの値と所定の判定基準とを比較して流体回転機械の状態、つまり、正常であるか異常であるかを判断することができる。
【0017】
請求項2記載の流体回転機械の診断方法は、請求項1記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群はそれぞれ前記流体回転機械の振動信号、電気信号、温度信号、及び圧力信号のいずれか2以上を有している。
請求項2記載の流体回転機械の診断方法において、振動信号、電気信号、温度信号、及び圧力信号は、例えば、それぞれ所定時間当たりの変化率に変換されて無次元のパラメータとされ、(1)式において、x1 〜xk として表される。
【0018】
請求項3記載の流体回転機械の診断方法は、請求項2記載の流体回転機械の診断方法において、前記振動信号は、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比のいずれか2以上の無次元のパラメータに変換される。
請求項3記載の流体回転機械の診断方法において、歪み度、尖り度、波高率、極小値率、極大値率、及び最大値率は、一般的な統計解析の式であり、それぞれ(5)式〜(10)式で示される。また、安定指数、周波数波高率、等価帯域、及び周波数高低比は、波形の情報を定量化する数式であり、それぞれ(11)式〜(14)式で示される。これらは(1)式において、x1 〜xk として表される。
【0019】
【数5】
【0020】
【数6】
【0021】
【数7】
【0022】
【数8】
【0023】
【数9】
【0024】
【数10】
【0025】
【数11】
【0026】
【数12】
【0027】
【数13】
【0028】
【数14】
【0029】
なお、(11)式〜(14)式で示される安定指数、周波数波高率、等価帯域、及び周波数高低比は、振動信号の時系列波形を高速フーリエ変換(Fast Fourier Transform)することにより求めたパワースペクトルP(fi)の形状を定量化するパラメータである。
【0030】
請求項4記載の流体回転機械の診断方法は、請求項2及び3記載の流体回転機械の診断方法において、前記振動信号は、前記流体回転機械のケーシングに設置した加速度センサによって測定される前記流体回転機械の振動の加速度である。
請求項4記載の流体回転機械の診断方法において、加速度センサは機械的なショックや振動を受けると電気出力を発生する電気変換器であり、比較的大きな信号を検出対象とし、共振周波数より低い周波数においての力の変化、すなわち、加速度に比例した電荷の変化を引き起こす効果を利用した装置である。
【0031】
加速度センサとしては、例えば圧電型の加速度センサが知られ、圧電型の加速度センサは電荷出力型とアンプ内蔵型に分類される。アンプ内蔵型は更に定電流駆動型と電圧駆動型があり、小型で駆動が容易であるため定電流駆動型が好適に使用される。
【0032】
請求項5記載の流体回転機械の診断方法は、請求項1〜4記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群のそれぞれの状態信号は前記流体回転機械の1箇所又は2箇所以上で測定される。
請求項5記載の流体回転機械の診断方法において、流体回転機械の、例えばモータ等において、その回転軸の軸心を水平方向に配置した場合に、回転軸の軸心に対して、垂直方向及び水平方向、また、回転軸の軸心と同一方向等の振動信号を測定することができる。
【0033】
請求項6記載の流体回転機械の診断方法は、請求項1〜5記載の流体回転機械の診断方法において、前記第4工程における前記流体回転機械の状態判断は統計的一般化漸近理論によって行う。
請求項6記載の流体回転機械の診断方法において、統計的一般化漸近理論は(15)式で示される。ここで、(15)式から、(16)式及び(17)式でそれぞれ表される帰無仮説H0 、対立仮説H1 に対して、有意水準をαとすると多変量カルバック・ライブラー情報量の推定値は(18)式で示される。なお、k変量MKIの判定基準Rk (α)はカイ二乗分布(χ2 分布)に従う。
【0034】
【数15】
【0035】
【数16】
【0036】
【数17】
【0037】
【数18】
【0038】
ここで、MKIの推定量がk変量MKIの判定基準Rk (α)よりも小さい場合には、正常時及び点検時の振動データの分布が同じであり、流体回転機械が正常であると判断する。また、MKIの推定量がk変量MKIの判定基準Rk (α)以上の場合には、正常時及び点検時の振動データの分布が異なり、流体回転機械が異常であると判断する。
【0039】
請求項7記載の流体回転機械の診断方法は、請求項6記載の流体回転機械の診断方法において、前記流体回転機械の状態判断は2段階で行われる。
請求項7記載の流体回転機械の診断方法において、MKIの推定量がk変量MKIの判定基準Rk (α)よりも低いRk (β)を設定し、Rk (β)を注意レベル、Rk (α)を危険レベルとする。
【0040】
ここで、(19)式に示すように、MKIが注意レベルRk (β)未満では、流体回転機械が正常であると判断できる。また、(20)式に示すように、MKIが注意レベルRk (β)以上で危険レベルRk (α)未満では、流体回転機械の異常が発生し易くなっていると判断でき、余寿命予測と精密診断を施し、予備機の準備及び必要な部品の調達等のいずれか1又は2以上の保全計画を立てることができる。更に、(21)式に示すように、MKIが危険レベルRk (α)以上では、流体回転機械に異常が発生していると判断でき、流体回転機械の取り替え、整備等を行う。
【0041】
【数19】
【0042】
【数20】
【0043】
【数21】
【0044】
請求項8記載の流体回転機械の診断方法は、請求項1〜7記載の流体回転機械の診断方法において、前記第1及び第2の状態データ群はそれぞれフィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理が行われる。
請求項8記載の流体回転機械の診断方法において、状態信号には流体回転機械の外部及び内部からの雑音(ノイズ)等が含まれるので、ノイズ除去、時間平均化、及び包絡線処理等のいずれか1又は2以上の前処理を行う。
【0045】
請求項9記載の流体回転機械の診断方法は、請求項1〜8記載の流体回転機械の診断方法において、前記第2の状態信号群はオンラインで処理され、該第2の状態信号群の状態信号は逐次解析されて、前記流体回転機械をオンラインで監視する。
請求項9記載の流体回転機械の診断方法は、複数の流体回転機械をインターネット又はイントラネット等のネットワークで接続して、1つの処理装置、例えばパーソナルコンピュータで解析することができる。多変量カルバック・ライブラー情報量によって、流体回転機械の状態を判断するので、流体回転機械のそれぞれに判定基準を設けなくてもよい。
【発明の効果】
【0046】
請求項1〜9記載の流体回転機械の診断方法は、流体回転機械の正常時及び点検時に所定時間間隔でそれぞれ測定した状態信号からなる第1及び第2の状態信号群から得られる有次元の第1及び第2の状態データ群をそれぞれ変換した第1及び第2の複数の無次元のパラメータ群からなる第1及び第2のマトリックスから1つの多変量カルバック・ライブラー情報量として算出して流体回転機械の状態を判断するので、高精度で信頼性の高い診断が可能で、統一的な判定基準が設定できる。
【0047】
特に、請求項2記載の流体回転機械の診断方法は、第1及び第2の状態信号群が流体回転機械の振動信号、電気信号、温度信号、及び圧力信号のいずれか2以上を有しているので、複数の状態信号を定量化して流体回転機械の状態をより高精度に判断できる。
請求項3記載の流体回転機械の診断方法は、振動信号は、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比のいずれか2以上の無次元のパラメータに変換されるので、流体回転機械の回転機械の状態をより高精度に判断できる。
【0048】
請求項4記載の流体回転機械の診断方法は、振動信号が、流体回転機械のケーシングに設置した加速度センサによって測定される流体回転機械の振動の加速度であるので、簡単に測定できる。
請求項5記載の流体回転機械の診断方法は、第1及び第2の状態信号群は流体回転機械の1箇所又は2箇所以上で測定されるので、流体回転機械の異常の検出精度が向上する。
請求項6記載の流体回転機械の診断方法は、第4工程における流体回転機械の状態判断は統計的一般化漸近理論によって行うので、正確に判断可能である。
【0049】
請求項7記載の流体回転機械の診断方法は、流体回転機械の状態判断は2段階で行われるので、流体回転機械の保全計画を立てることができる。
請求項8記載の流体回転機械の診断方法は、第1及び第2の状態データ群はそれぞれフィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理が行われるので、計測精度を更に向上することができる。
請求項9記載の流体回転機械の診断方法は、第2の状態信号群はオンラインで処理され、第2の状態信号群の状態信号は逐次解析されて、流体回転機械をオンラインで監視するので、流体回転機械の異常の早期発見が可能となる。
【発明を実施するための最良の形態】
【0050】
続いて、添付した図面を参照しつつ、本発明を具体化した実施の形態につき説明し、本発明の理解に供する。
ここで、図1は本発明の一実施の形態に係る流体回転機械の診断方法を適用した流体回転機械の診断装置の説明図、図2、図3はそれぞれ同流体回転機械の診断装置で使用する真空ポンプの平面図、正面図、図4は同流体回転機械の診断方法のフローチャートである。
【0051】
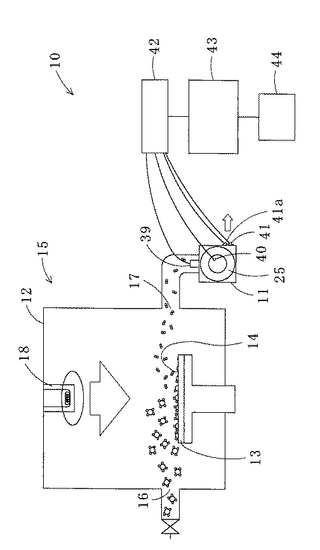
図1〜図3を参照して、本発明の一実施の形態に係る流体回転機械の診断方法を適用した流体回転機械の診断装置(以下、単に診断装置ともいう)10について説明する。
流体回転機械の診断装置10は、回転部に機械要素を有する流体回転機械の一例である真空ポンプ11の診断を行う装置である。
【0052】
真空ポンプは、例えば、スパッター、イオンプレーティング、真空乾燥、凍結乾燥、ガス回収、脱泡、含浸、又は蒸留等に使用されるが、本実施の形態において真空ポンプ11は、反応容器12内に配置した基板13上に薄膜14を形成する化学蒸着(chemical vapor deposition )を行う化学蒸着装置15に設けられ、反応容器12内を例えば、1〜100Paまで減圧している。化学蒸着装置15の反応容器12には、反応容器12内に供給するキャリアガス及び原料ガスを吹き込むガス供給口16と、反応容器12内のガスを排出するガス排出口17とが設けられ、また、反応容器12の内部又は外部には、基板13と原料ガスとを反応させる熱、プラズマ、又は光等のエネルギーを供給するエネルギー供給部18が設けられている。
【0053】
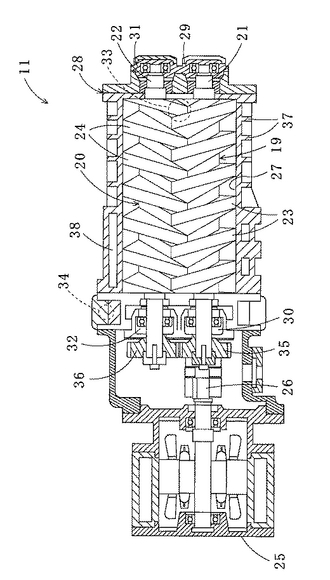
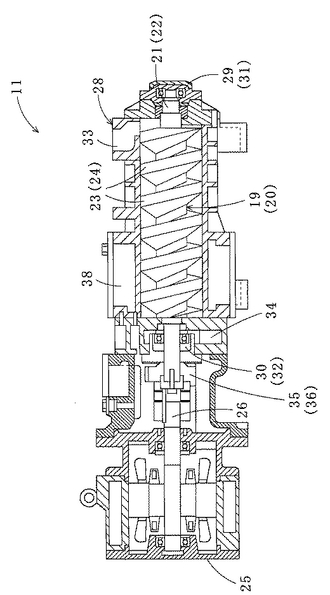
反応容器12のガス排出口17に連結管を介して配置された真空ポンプ11は、図2及び図3に示すように、平行配置される第1及び第2のスクリューロータ19、20を有している。第1及び第2のスクリューロータ19、20は、それぞれ回転軸21、22と、回転軸21、22に設けられてそれぞれが噛み合う螺旋状の歯形部23、24とを有し、第1のスクリューロータ19の一端側にはモータ25の回転軸26が接続されている。なお、第1のスクリューロータ19の歯形部23は右ネジに、第2のスクリューロータ20の歯形部24は左ネジに形成されている。
【0054】
真空ポンプ11は、内部に第1及び第2のスクリューロータ19、20が配置される内筒部27が形成されたケーシング28を有している。また、第1及び第2のスクリューロータ19、20は、それぞれの両端部がケーシング28に設けられたベアリングを有する軸受け29、30、軸受け31、32で支持されている。また、ケーシング28には、ガス排出口17から反応容器12内の気体を吸い込む吸入口33が第1及び第2のスクリューロータ19、20の他端側の回転軸21、22の間に設けられ、第2のスクリューロータ20の一端側の側面部に真空ポンプ11に吸い込まれた気体を真空ポンプ11の外部に排出する吐出口34が設けられている。
【0055】
第1及び第2のスクリューロータ19、20の回転軸21、22の一端部には、それぞれモータ25の駆動によって回転する第1のスクリューロータ19に連動して、第2のスクリューロータ20を回転させるタイミングギア35、36が設けられている。ケーシング28には、吸入口33側の側面に冷却用のフィン37が複数設けられ、更に、吐出口34側の側面に冷却水が供給される冷却水室38が設けられ、反応容器12内の高温のガスを冷却している。
【0056】
ここで、真空ポンプ11は、モータ25を駆動させて第1及び第2のスクリューロータ19、20を回転させ、第1及び第2のスクリューロータ19、20の歯形部23、24とケーシング28の内筒部27とで形成される空間に貯留される気体を吸入口33側から吐出口34側に移動することによって吸入口33から気体を吸引することができる。真空ポンプ11の状態によって、基板13への薄膜14の形成が異なるため、真空ポンプ11の状態を把握して真空ポンプ11の異常を早期に発見することが必要となる。
【0057】
図1に示すように、真空ポンプ11の診断装置10は、第1のスクリューロータ19の回転軸21の軸受け29の上方でケーシング28の上部に振動信号の一例である加速度を検知する加速度センサ39を有している。また、診断装置10は、モータ25の図示しない電源の電気信号の一例である電流値を測定する電流センサ40と、真空ポンプ11の吐出口34に設けられて真空ポンプ11から排出される気体の温度信号である温度を測定する温度センサ41と、真空ポンプ11の吐出口34に設けられて真空ポンプ11から排出される気体の圧力信号である吐出圧を測定する圧力センサ41aとを有している。真空ポンプ11の加速度、モータ25の電流値、及び真空ポンプ11から排出される気体の温度及び圧力は、所定時間間隔、例えば、周波数10Hz〜50kHz(ここでは、25kHz、つまり、40μ秒間間隔)で測定される。
【0058】
また、診断装置10は、加速度センサ39、電流センサ40、温度センサ41、及び圧力センサ41aでそれぞれ測定したアナログの状態信号(振動信号、電気信号、温度信号、及び圧力信号)をデジタルの状態データ(振動データ、電気データ、温度データ、及び圧力データ)に変換するA/D変換器42と、A/D変換器42で得られた状態データを処理する処理ユニット43と、処理ユニット43による真空ポンプ11の診断結果等を表示するモニタ44を有している。ここで、測定点の数(n)は、特に限定しないが、少ないと正確な判断が難しく、多いと処理に時間がかかり、処理ユニット43のメモリーを多くしなければならない等の問題がある。なお、診断装置10では、正常時及び点検時における測定点を65536点、測定時間をおよそ2.6秒間とした。
【0059】
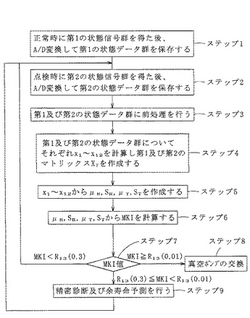
次に、図1〜図4を参照して、診断装置10を使用した本発明の一実施の形態に係る流体回転機械の診断方法について説明する。
(第1工程)
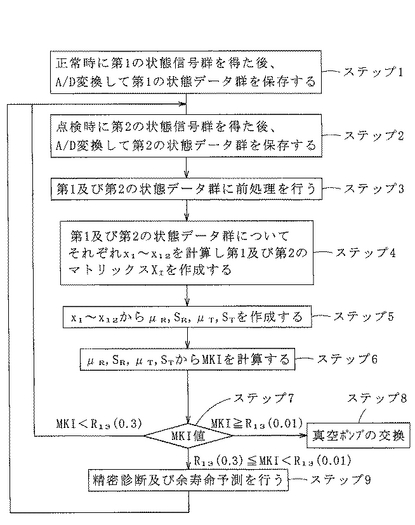
まず、真空ポンプ11の正常時に、加速度センサ39、電流センサ40、温度センサ41、及び圧力センサ41aによって真空ポンプ11の振動の加速度(振動信号)、真空ポンプ11のモータ25の電流値(電気信号)、真空ポンプ11の吐出口34から排出される気体の温度(温度信号)及び吐出圧(圧力信号)を所定時間間隔(25kHz、つまり、40μ秒間間隔)で測定して第1の状態信号群を得る。得られた第1の状態信号群のそれぞれの状態信号を、A/D変換器42でそれぞれ有次元の状態データに変換して、第1の状態データ群として処理ユニット43に保存する。ここで、状態データは、デジタル化された振動データ、電気データ、温度データ、及び圧力データである(以下同様)(ステップ1)。
【0060】
更に、真空ポンプ11の点検時に、正常時と同様に加速度センサ39、電流センサ40、温度センサ41、及び圧力センサ41aによって振動信号、電気信号、温度信号、及び圧力信号を所定時間間隔(25kHz、つまり、40μ秒間間隔)で測定して第2の状態信号群を得た後、得られた第2の状態信号群のそれぞれの状態信号をA/D変換器42によってデジタル化し、振動データ、電気データ、温度データ、及び圧力データからなる第2の状態データ群を処理ユニット43に保存する(ステップ2)。
【0061】
(第2工程)
処理ユニット43は、得られた第1及び第2の状態データ群のそれぞれの状態データに対して、フィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理を行う(ステップ3)。
【0062】
処理ユニット43は、前処理を行った第1及び第2の状態データ群のそれぞれの状態データを無次元のパラメータに変換して、第1及び第2のパラメータ群を得る。ここで、振動データは、それぞれ複数の無次元のパラメータ、例えば歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比の10個の無次元のパラメータに変換する。なお、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比は、それぞれ(5)式〜(14)式で示され、(1)式、(2)式においてそれぞれx1 〜x10とする。また、電気データx11、温度データx12、及び圧力データx13は、それぞれ(22)式〜(24)式で求められる所定時間当たりの変化率、すなわち、電流変動率、温度上昇率、吐出圧変化率として表される。
【0063】
【数22】
【0064】
【数23】
【0065】
【数24】
【0066】
更に、処理ユニット43は、(5)式〜(14)式、(22)式〜(24)式によって得られる各パラメータ(x1 〜x13)から、(25)式に示す時系列の第1及び第2のマトリックスXI をそれぞれ作成する(ステップ4)。
【0067】
【数25】
【0068】
(第3工程)
処理ユニット43は、第1及び第2のマトリックスXI を1つの多変量カルバック・ライブラー情報量として算出するために、(25)式から得られるx1 〜x13のそれぞれの平均値μ1 〜μ13からなる平均マトリックスμI (すなわち、正常時のμR 、点検時のμT )を作成する。平均マトリックスμI は、(26)式で示される。また、処理ユニット43は、(25)式及び(26)式から、(27)式に示される正常時及び点検時の共分散マトリックスSI (すなわち、正常時のSR 、点検時のST )をそれぞれ求める(ステップ5)。
【0069】
【数26】
【0070】
【数27】
【0071】
ここで、μR 、SR 、μT 、ST を(28)式に代入することによって、多変量カルバック・ライブラー情報量MKIを算出する(ステップ6)。
【0072】
【数28】
【0073】
(第4工程)
更に、処理ユニット43は、(28)式によって得られたMKIと、統計的一般化漸近理論(15)式から導き出される(19)式〜(21)式に示す判定基準Rk (α)、Rk (β)とを比較する。なお、(29)式に示すように、危険レベルの判定基準Rk (α)は、パラメータの数kが13であり、有意水準αを0.01とすると、70.0となる。また、(30)式に示すように、注意レベルのRk (β)は、パラメータの数kが13であり、有意水準βを0.3とすると、55.6となる。
【0074】
【数29】
【0075】
【数30】
【0076】
ここで、MKIが48.3よりも小さい場合には、正常時及び点検時の振動データの分布がほぼ同じであり、真空ポンプ11が正常であると判断する。また、MKIが55.6以上で70.0未満の場合には、正常時及び点検時の振動データの分布が異なり、真空ポンプ11に軽微な異常が発生している注意レベルであると判断する。更に、MKIが70.0以上の場合には、正常時及び点検時の振動データの分布が異なり、真空ポンプ11に重大な異常が発生している危険レベルであると判断する。これらの診断結果はモニタ44に表示される(ステップ7)。
【0077】
ここで、真空ポンプ11が危険レベルである場合には、真空ポンプ11を交換する(ステップ8)。また、真空ポンプ11が注意レベルである場合には、真空ポンプ11の余寿命予測及び精密診断を行う。精密診断は、例えば、第1及び第2のスクリューロータ19、20、モータ25、及び軸受け29〜32等の回転部について行い、異常のある箇所を特定する。余寿命予測及び精密診断により、予め予備の真空ポンプの準備や必要な部品の調達等の保全計画を立てる(ステップ9)。真空ポンプ11が正常である場合には、所定の点検時に再び真空ポンプ11を診断装置10で検査する。なお、モニタ44には診断結果の他に、パラメータx1 〜x13の結果等を表示してもよい。
【0078】
本発明は、前記した実施の形態に限定されるものではなく、本発明の要旨を変更しない範囲での変更は可能であり、例えば、前記した実施の形態や変形例の一部又は全部を組み合わせて本発明の流体回転機械の診断方法を構成する場合も本発明の権利範囲に含まれる。
例えば、前記実施の形態の流体回転機械の診断方法において、流体回転機械として、真空ポンプを使用したが、送風機、又は圧縮機等でもよい。また、流体回転機械には、気体を供給したが、液体を使用してもよい。
【0079】
流体回転機械(例えば、真空ポンプ)の状態信号としては、振動信号、電気信号、温度信号、及び圧力信号を測定したが、流体回転機械を冷却する冷却水の流量及び温度の一方又は双方を検知した信号、又は、流体回転機械に供給するガスの流量及び温度の一方又は双方を検知した信号等を測定してもよい。更に、これらの2以上を組み合わせて測定してもよい。
【0080】
また、振動信号としては、流体回転機械の振動の加速度としたが、流体回転機械の振動の変位及び速度の一方又は双方を振動信号としてもよく、これらを組み合わせてもよい。電気信号としては、流体回転機械の回転部を回転させるモータの電流値としたが、モータの電圧値及び抵抗値の一方又は双方を電気信号としてもよく、これらを組み合わせてもよい。
【0081】
また、加速度センサを第1のスクリューロータの回転軸のモータとは反対側の軸受けの上方でケーシングの上部に取付けたが、加速度を測定できればよく、第2のスクリューロータの回転軸の軸受けの上方でケーシングの上部等に取付けてもよい。また、加速度センサをケーシングの上部の1箇所に取付けたが、2箇所以上、例えば第1及び第2のスクリューロータの回転軸の水平方向、及び、第1及び第2のスクリューロータの回転軸の軸心と同一方向等のケーシングの側面に取付けて、それぞれの加速度センサで加速度を測定し、1つの多変量カルバック・ライブラー情報量として計算してもよい。
【0082】
点検時に測定される第2の状態信号群をオフラインで処理したが、オンラインで処理し、第2の状態信号群の状態信号を逐次解析して、流体回転機械をオンラインで監視してもよい。また、複数の流体回転機械をインターネット又はイントラネット等のネットワークで接続して、1つの処理装置、例えばパーソナルコンピュータで解析してもよい。第2の状態信号群をオンラインで逐次解析することによって、流体回転機械の異常の早期発見が可能となる。
【図面の簡単な説明】
【0083】
【図1】本発明の一実施の形態に係る流体回転機械の診断方法を適用した流体回転機械の診断装置の説明図である。
【図2】同流体回転機械の診断装置で使用する真空ポンプの平面図である。
【図3】同流体回転機械の診断装置で使用する真空ポンプの正面図である。
【図4】同流体回転機械の診断方法のフローチャートである。
【符号の説明】
【0084】
10:流体回転機械の診断装置、11:真空ポンプ、12:反応容器、13:基板、14:薄膜、15:化学蒸着装置、16:ガス供給口、17:ガス排出口、18:エネルギー供給部、19:第1のスクリューロータ、20:第2のスクリューロータ、21、22:回転軸、23、24:歯形部、25:モータ、26:回転軸、27:内筒部、28:ケーシング、29〜32:軸受け、33:吸入口、34:吐出口、35、36:タイミングギア、37:フィン、38:冷却水室、39:加速度センサ、40:電流センサ、41:温度センサ、41a:圧力センサ、42:A/D変換器、43:処理ユニット、44:モニタ
【技術分野】
【0001】
本発明は、正常時と点検時の状態を比較して流体回転機械を診断する方法に関する。
【背景技術】
【0002】
従来、真空ポンプ、送風機、又は圧縮機等の流体回転機械の機械要素である歯車、ベアリング、又はロータ等の状態診断には、音響、視覚、及び触覚等のいずれか1又は2以上の機械的(五感及び電気的に測定したものも含む)な兆候による方法、電圧量及び電流量等のいずれか1又は2以上の変化による電気的な兆候による方法、及び潤滑油中の金属屑等の異物の分析による方法等が知られている。また、流体回転機械のケーシングに取付けられた加速度センサ等で検知した振動の振動信号等から得られる1変量のパラメータによる診断方法も知られている(例えば、非特許文献1参照)。
【0003】
【非特許文献1】劉信芳、他4名、「対称型カルバック情報量による回転機械の異常診断」、日本設備管理学会誌、1998、第10巻、第3号、p.22−27
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、流体回転機械の状態を機械的な兆候による方法、電気的な兆候による方法、又は潤滑油の分析による方法等によって解析する場合には、測定値が流体回転機械の使用状況等によって大きくばらつくため、流体回転機械の状態の判断が困難であり、異常の早期発見が難しかった。また、同一の流体回転機械であっても測定点又は測定する人等が異なると判定基準が異なっていた。更に、異なった流体回転機械ではそれぞれに判定基準を設定しなければならなかった。また、非特許文献1に記載された方法では、1変量によって診断しているので診断精度が低かった。
【0005】
本発明はかかる事情に鑑みてなされたもので、統一的な判定基準の設定が可能な高精度の流体回転機械の診断方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的に沿う請求項1記載の流体回転機械の診断方法は、予め回転部に機械要素を有する流体回転機械の正常時に該流体回転機械の状態を示す複数の状態信号からなる第1の状態信号群を所定時間間隔でそれぞれ測定して有次元の第1の状態データ群を得た後、前記流体回転機械の点検時に該流体回転機械の状態を示す複数の状態信号からなる第2の状態信号群を所定時間間隔でそれぞれ測定して有次元の第2の状態データ群を得る第1工程と、
前記第1の状態データ群をそれぞれ無次元の第1のパラメータ群に変換した時系列の第1のマトリックスと、前記第2の状態データ群をそれぞれ無次元の第2のパラメータ群に変換した時系列の第2のマトリックスとをそれぞれ作成する第2工程と、
前記第1及び第2のマトリックスを1つの多変量カルバック・ライブラー情報量として算出する第3工程と、
前記多変量カルバック・ライブラー情報量によって前記流体回転機械の状態を判断する第4工程とを有し、
前記流体回転機械の正常時の状態信号と点検時の状態信号とを比較して前記回転機械の異常を検知する。
【0007】
請求項1記載の流体回転機械の診断方法において、真空ポンプ、送風機、又は圧縮機等の流体回転機械の回転部には、歯車、ベアリング、及びロータ等の1又は2以上が含まれる。また、流体として液体又は気体を使用することができる。流体回転機械の状態信号としては、流体回転機械の振動の変位、速度、及び加速度等の1又は2以上を検知した信号、すなわち、振動信号、流体回転機械の回転部を回転させるモータ等の電流及び電圧の一方又は双方を検知した信号、すなわち、電気信号、流体回転機械から排出する気体の温度を検知した信号、すなわち、温度信号、流体回転機械で吸引した空間の圧力を検知した信号、すなわち、圧力信号、流体回転機械を冷却する冷却水の流量及び温度の一方又は双方を検知した信号、及び、流体回転機械に供給するガスの流量及び温度の一方又は双方を検知した信号等があり、これらの複数の状態信号からなる状態信号群を所定時間間隔、例えば、20μ秒間〜0.1秒間間隔、つまりサンプリング周波数10Hz〜50kHzで測定する。
【0008】
流体回転機械の正常時及び点検時に測定した第1及び第2の状態信号群は、それぞれのアナログの状態信号がデジタルの状態データに変換されて、それぞれ有次元の第1及び第2の状態データ群が得られる。また、第1及び第2の状態データ群は、それぞれ第1及び第2の無次元のパラメータ群に変換される。ここで、例えば、温度信号の有次元の状態データの場合には、所定時間間隔毎の温度の変化率(無次元)に変換することができる。更に、第1及び第2の複数の無次元のパラメータ群から、それぞれ第1及び第2の時系列のマトリックスが作成される。
【0009】
ここで、多変量カルバック・ライブラー情報量(Multivariate Kullback-Leibler Infomation、以下、MKIともいう)は、経済統計学等に使用される統計理論であって、(1)式で示される。ここで、fR は正常時(Reference 、R)の複数状態データの分布、fT は点検時(Test、T)の複数状態データの分布を示し、それぞれのx1 〜xk は有次元の振動データから変換された複数(k個)のパラメータを示す。
【0010】
μR 及びμT はそれぞれのx1 〜xk のk変量の平均値ベクトルであり、SR 及びST はそれぞれのx1 〜xk 及び、μR 又はμT から求められるk変量の共分散マトリックスである。μR 、μT 、SR 、及びST については、後で詳しく述べる。多変量カルバック・ライブラー情報量は、正常時の複数状態データの分布と点検時の複数状態データの分布との差異を示し、この値によって流体回転機械の異常を検知することができる。
【0011】
【数1】
【0012】
正常時及び点検時の状態データをそれぞれ複数の無次元のパラメータ(x1 〜xk )に変換した時系列の第1及び第2のマトリックスXI を(2)式に示し、x1 〜xk のそれぞれの平均値(μ1 〜μk )からなる平均マトリックスμI を(3)式に示す。なお、Iは、R又はTである(以下同様)。
【0013】
【数2】
【0014】
【数3】
【0015】
【数4】
【0016】
ここで、(2)式及び(3)式から、(4)式に示される正常時及び点検時の共分散マトリックスSI をそれぞれ求め、μR 、SR 、μT 、ST を(1)式に代入して、多変量カルバック・ライブラー情報量MKIを算出する。算出されたMKIの値と所定の判定基準とを比較して流体回転機械の状態、つまり、正常であるか異常であるかを判断することができる。
【0017】
請求項2記載の流体回転機械の診断方法は、請求項1記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群はそれぞれ前記流体回転機械の振動信号、電気信号、温度信号、及び圧力信号のいずれか2以上を有している。
請求項2記載の流体回転機械の診断方法において、振動信号、電気信号、温度信号、及び圧力信号は、例えば、それぞれ所定時間当たりの変化率に変換されて無次元のパラメータとされ、(1)式において、x1 〜xk として表される。
【0018】
請求項3記載の流体回転機械の診断方法は、請求項2記載の流体回転機械の診断方法において、前記振動信号は、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比のいずれか2以上の無次元のパラメータに変換される。
請求項3記載の流体回転機械の診断方法において、歪み度、尖り度、波高率、極小値率、極大値率、及び最大値率は、一般的な統計解析の式であり、それぞれ(5)式〜(10)式で示される。また、安定指数、周波数波高率、等価帯域、及び周波数高低比は、波形の情報を定量化する数式であり、それぞれ(11)式〜(14)式で示される。これらは(1)式において、x1 〜xk として表される。
【0019】
【数5】
【0020】
【数6】
【0021】
【数7】
【0022】
【数8】
【0023】
【数9】
【0024】
【数10】
【0025】
【数11】
【0026】
【数12】
【0027】
【数13】
【0028】
【数14】
【0029】
なお、(11)式〜(14)式で示される安定指数、周波数波高率、等価帯域、及び周波数高低比は、振動信号の時系列波形を高速フーリエ変換(Fast Fourier Transform)することにより求めたパワースペクトルP(fi)の形状を定量化するパラメータである。
【0030】
請求項4記載の流体回転機械の診断方法は、請求項2及び3記載の流体回転機械の診断方法において、前記振動信号は、前記流体回転機械のケーシングに設置した加速度センサによって測定される前記流体回転機械の振動の加速度である。
請求項4記載の流体回転機械の診断方法において、加速度センサは機械的なショックや振動を受けると電気出力を発生する電気変換器であり、比較的大きな信号を検出対象とし、共振周波数より低い周波数においての力の変化、すなわち、加速度に比例した電荷の変化を引き起こす効果を利用した装置である。
【0031】
加速度センサとしては、例えば圧電型の加速度センサが知られ、圧電型の加速度センサは電荷出力型とアンプ内蔵型に分類される。アンプ内蔵型は更に定電流駆動型と電圧駆動型があり、小型で駆動が容易であるため定電流駆動型が好適に使用される。
【0032】
請求項5記載の流体回転機械の診断方法は、請求項1〜4記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群のそれぞれの状態信号は前記流体回転機械の1箇所又は2箇所以上で測定される。
請求項5記載の流体回転機械の診断方法において、流体回転機械の、例えばモータ等において、その回転軸の軸心を水平方向に配置した場合に、回転軸の軸心に対して、垂直方向及び水平方向、また、回転軸の軸心と同一方向等の振動信号を測定することができる。
【0033】
請求項6記載の流体回転機械の診断方法は、請求項1〜5記載の流体回転機械の診断方法において、前記第4工程における前記流体回転機械の状態判断は統計的一般化漸近理論によって行う。
請求項6記載の流体回転機械の診断方法において、統計的一般化漸近理論は(15)式で示される。ここで、(15)式から、(16)式及び(17)式でそれぞれ表される帰無仮説H0 、対立仮説H1 に対して、有意水準をαとすると多変量カルバック・ライブラー情報量の推定値は(18)式で示される。なお、k変量MKIの判定基準Rk (α)はカイ二乗分布(χ2 分布)に従う。
【0034】
【数15】
【0035】
【数16】
【0036】
【数17】
【0037】
【数18】
【0038】
ここで、MKIの推定量がk変量MKIの判定基準Rk (α)よりも小さい場合には、正常時及び点検時の振動データの分布が同じであり、流体回転機械が正常であると判断する。また、MKIの推定量がk変量MKIの判定基準Rk (α)以上の場合には、正常時及び点検時の振動データの分布が異なり、流体回転機械が異常であると判断する。
【0039】
請求項7記載の流体回転機械の診断方法は、請求項6記載の流体回転機械の診断方法において、前記流体回転機械の状態判断は2段階で行われる。
請求項7記載の流体回転機械の診断方法において、MKIの推定量がk変量MKIの判定基準Rk (α)よりも低いRk (β)を設定し、Rk (β)を注意レベル、Rk (α)を危険レベルとする。
【0040】
ここで、(19)式に示すように、MKIが注意レベルRk (β)未満では、流体回転機械が正常であると判断できる。また、(20)式に示すように、MKIが注意レベルRk (β)以上で危険レベルRk (α)未満では、流体回転機械の異常が発生し易くなっていると判断でき、余寿命予測と精密診断を施し、予備機の準備及び必要な部品の調達等のいずれか1又は2以上の保全計画を立てることができる。更に、(21)式に示すように、MKIが危険レベルRk (α)以上では、流体回転機械に異常が発生していると判断でき、流体回転機械の取り替え、整備等を行う。
【0041】
【数19】
【0042】
【数20】
【0043】
【数21】
【0044】
請求項8記載の流体回転機械の診断方法は、請求項1〜7記載の流体回転機械の診断方法において、前記第1及び第2の状態データ群はそれぞれフィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理が行われる。
請求項8記載の流体回転機械の診断方法において、状態信号には流体回転機械の外部及び内部からの雑音(ノイズ)等が含まれるので、ノイズ除去、時間平均化、及び包絡線処理等のいずれか1又は2以上の前処理を行う。
【0045】
請求項9記載の流体回転機械の診断方法は、請求項1〜8記載の流体回転機械の診断方法において、前記第2の状態信号群はオンラインで処理され、該第2の状態信号群の状態信号は逐次解析されて、前記流体回転機械をオンラインで監視する。
請求項9記載の流体回転機械の診断方法は、複数の流体回転機械をインターネット又はイントラネット等のネットワークで接続して、1つの処理装置、例えばパーソナルコンピュータで解析することができる。多変量カルバック・ライブラー情報量によって、流体回転機械の状態を判断するので、流体回転機械のそれぞれに判定基準を設けなくてもよい。
【発明の効果】
【0046】
請求項1〜9記載の流体回転機械の診断方法は、流体回転機械の正常時及び点検時に所定時間間隔でそれぞれ測定した状態信号からなる第1及び第2の状態信号群から得られる有次元の第1及び第2の状態データ群をそれぞれ変換した第1及び第2の複数の無次元のパラメータ群からなる第1及び第2のマトリックスから1つの多変量カルバック・ライブラー情報量として算出して流体回転機械の状態を判断するので、高精度で信頼性の高い診断が可能で、統一的な判定基準が設定できる。
【0047】
特に、請求項2記載の流体回転機械の診断方法は、第1及び第2の状態信号群が流体回転機械の振動信号、電気信号、温度信号、及び圧力信号のいずれか2以上を有しているので、複数の状態信号を定量化して流体回転機械の状態をより高精度に判断できる。
請求項3記載の流体回転機械の診断方法は、振動信号は、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比のいずれか2以上の無次元のパラメータに変換されるので、流体回転機械の回転機械の状態をより高精度に判断できる。
【0048】
請求項4記載の流体回転機械の診断方法は、振動信号が、流体回転機械のケーシングに設置した加速度センサによって測定される流体回転機械の振動の加速度であるので、簡単に測定できる。
請求項5記載の流体回転機械の診断方法は、第1及び第2の状態信号群は流体回転機械の1箇所又は2箇所以上で測定されるので、流体回転機械の異常の検出精度が向上する。
請求項6記載の流体回転機械の診断方法は、第4工程における流体回転機械の状態判断は統計的一般化漸近理論によって行うので、正確に判断可能である。
【0049】
請求項7記載の流体回転機械の診断方法は、流体回転機械の状態判断は2段階で行われるので、流体回転機械の保全計画を立てることができる。
請求項8記載の流体回転機械の診断方法は、第1及び第2の状態データ群はそれぞれフィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理が行われるので、計測精度を更に向上することができる。
請求項9記載の流体回転機械の診断方法は、第2の状態信号群はオンラインで処理され、第2の状態信号群の状態信号は逐次解析されて、流体回転機械をオンラインで監視するので、流体回転機械の異常の早期発見が可能となる。
【発明を実施するための最良の形態】
【0050】
続いて、添付した図面を参照しつつ、本発明を具体化した実施の形態につき説明し、本発明の理解に供する。
ここで、図1は本発明の一実施の形態に係る流体回転機械の診断方法を適用した流体回転機械の診断装置の説明図、図2、図3はそれぞれ同流体回転機械の診断装置で使用する真空ポンプの平面図、正面図、図4は同流体回転機械の診断方法のフローチャートである。
【0051】
図1〜図3を参照して、本発明の一実施の形態に係る流体回転機械の診断方法を適用した流体回転機械の診断装置(以下、単に診断装置ともいう)10について説明する。
流体回転機械の診断装置10は、回転部に機械要素を有する流体回転機械の一例である真空ポンプ11の診断を行う装置である。
【0052】
真空ポンプは、例えば、スパッター、イオンプレーティング、真空乾燥、凍結乾燥、ガス回収、脱泡、含浸、又は蒸留等に使用されるが、本実施の形態において真空ポンプ11は、反応容器12内に配置した基板13上に薄膜14を形成する化学蒸着(chemical vapor deposition )を行う化学蒸着装置15に設けられ、反応容器12内を例えば、1〜100Paまで減圧している。化学蒸着装置15の反応容器12には、反応容器12内に供給するキャリアガス及び原料ガスを吹き込むガス供給口16と、反応容器12内のガスを排出するガス排出口17とが設けられ、また、反応容器12の内部又は外部には、基板13と原料ガスとを反応させる熱、プラズマ、又は光等のエネルギーを供給するエネルギー供給部18が設けられている。
【0053】
反応容器12のガス排出口17に連結管を介して配置された真空ポンプ11は、図2及び図3に示すように、平行配置される第1及び第2のスクリューロータ19、20を有している。第1及び第2のスクリューロータ19、20は、それぞれ回転軸21、22と、回転軸21、22に設けられてそれぞれが噛み合う螺旋状の歯形部23、24とを有し、第1のスクリューロータ19の一端側にはモータ25の回転軸26が接続されている。なお、第1のスクリューロータ19の歯形部23は右ネジに、第2のスクリューロータ20の歯形部24は左ネジに形成されている。
【0054】
真空ポンプ11は、内部に第1及び第2のスクリューロータ19、20が配置される内筒部27が形成されたケーシング28を有している。また、第1及び第2のスクリューロータ19、20は、それぞれの両端部がケーシング28に設けられたベアリングを有する軸受け29、30、軸受け31、32で支持されている。また、ケーシング28には、ガス排出口17から反応容器12内の気体を吸い込む吸入口33が第1及び第2のスクリューロータ19、20の他端側の回転軸21、22の間に設けられ、第2のスクリューロータ20の一端側の側面部に真空ポンプ11に吸い込まれた気体を真空ポンプ11の外部に排出する吐出口34が設けられている。
【0055】
第1及び第2のスクリューロータ19、20の回転軸21、22の一端部には、それぞれモータ25の駆動によって回転する第1のスクリューロータ19に連動して、第2のスクリューロータ20を回転させるタイミングギア35、36が設けられている。ケーシング28には、吸入口33側の側面に冷却用のフィン37が複数設けられ、更に、吐出口34側の側面に冷却水が供給される冷却水室38が設けられ、反応容器12内の高温のガスを冷却している。
【0056】
ここで、真空ポンプ11は、モータ25を駆動させて第1及び第2のスクリューロータ19、20を回転させ、第1及び第2のスクリューロータ19、20の歯形部23、24とケーシング28の内筒部27とで形成される空間に貯留される気体を吸入口33側から吐出口34側に移動することによって吸入口33から気体を吸引することができる。真空ポンプ11の状態によって、基板13への薄膜14の形成が異なるため、真空ポンプ11の状態を把握して真空ポンプ11の異常を早期に発見することが必要となる。
【0057】
図1に示すように、真空ポンプ11の診断装置10は、第1のスクリューロータ19の回転軸21の軸受け29の上方でケーシング28の上部に振動信号の一例である加速度を検知する加速度センサ39を有している。また、診断装置10は、モータ25の図示しない電源の電気信号の一例である電流値を測定する電流センサ40と、真空ポンプ11の吐出口34に設けられて真空ポンプ11から排出される気体の温度信号である温度を測定する温度センサ41と、真空ポンプ11の吐出口34に設けられて真空ポンプ11から排出される気体の圧力信号である吐出圧を測定する圧力センサ41aとを有している。真空ポンプ11の加速度、モータ25の電流値、及び真空ポンプ11から排出される気体の温度及び圧力は、所定時間間隔、例えば、周波数10Hz〜50kHz(ここでは、25kHz、つまり、40μ秒間間隔)で測定される。
【0058】
また、診断装置10は、加速度センサ39、電流センサ40、温度センサ41、及び圧力センサ41aでそれぞれ測定したアナログの状態信号(振動信号、電気信号、温度信号、及び圧力信号)をデジタルの状態データ(振動データ、電気データ、温度データ、及び圧力データ)に変換するA/D変換器42と、A/D変換器42で得られた状態データを処理する処理ユニット43と、処理ユニット43による真空ポンプ11の診断結果等を表示するモニタ44を有している。ここで、測定点の数(n)は、特に限定しないが、少ないと正確な判断が難しく、多いと処理に時間がかかり、処理ユニット43のメモリーを多くしなければならない等の問題がある。なお、診断装置10では、正常時及び点検時における測定点を65536点、測定時間をおよそ2.6秒間とした。
【0059】
次に、図1〜図4を参照して、診断装置10を使用した本発明の一実施の形態に係る流体回転機械の診断方法について説明する。
(第1工程)
まず、真空ポンプ11の正常時に、加速度センサ39、電流センサ40、温度センサ41、及び圧力センサ41aによって真空ポンプ11の振動の加速度(振動信号)、真空ポンプ11のモータ25の電流値(電気信号)、真空ポンプ11の吐出口34から排出される気体の温度(温度信号)及び吐出圧(圧力信号)を所定時間間隔(25kHz、つまり、40μ秒間間隔)で測定して第1の状態信号群を得る。得られた第1の状態信号群のそれぞれの状態信号を、A/D変換器42でそれぞれ有次元の状態データに変換して、第1の状態データ群として処理ユニット43に保存する。ここで、状態データは、デジタル化された振動データ、電気データ、温度データ、及び圧力データである(以下同様)(ステップ1)。
【0060】
更に、真空ポンプ11の点検時に、正常時と同様に加速度センサ39、電流センサ40、温度センサ41、及び圧力センサ41aによって振動信号、電気信号、温度信号、及び圧力信号を所定時間間隔(25kHz、つまり、40μ秒間間隔)で測定して第2の状態信号群を得た後、得られた第2の状態信号群のそれぞれの状態信号をA/D変換器42によってデジタル化し、振動データ、電気データ、温度データ、及び圧力データからなる第2の状態データ群を処理ユニット43に保存する(ステップ2)。
【0061】
(第2工程)
処理ユニット43は、得られた第1及び第2の状態データ群のそれぞれの状態データに対して、フィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理を行う(ステップ3)。
【0062】
処理ユニット43は、前処理を行った第1及び第2の状態データ群のそれぞれの状態データを無次元のパラメータに変換して、第1及び第2のパラメータ群を得る。ここで、振動データは、それぞれ複数の無次元のパラメータ、例えば歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比の10個の無次元のパラメータに変換する。なお、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比は、それぞれ(5)式〜(14)式で示され、(1)式、(2)式においてそれぞれx1 〜x10とする。また、電気データx11、温度データx12、及び圧力データx13は、それぞれ(22)式〜(24)式で求められる所定時間当たりの変化率、すなわち、電流変動率、温度上昇率、吐出圧変化率として表される。
【0063】
【数22】
【0064】
【数23】
【0065】
【数24】
【0066】
更に、処理ユニット43は、(5)式〜(14)式、(22)式〜(24)式によって得られる各パラメータ(x1 〜x13)から、(25)式に示す時系列の第1及び第2のマトリックスXI をそれぞれ作成する(ステップ4)。
【0067】
【数25】
【0068】
(第3工程)
処理ユニット43は、第1及び第2のマトリックスXI を1つの多変量カルバック・ライブラー情報量として算出するために、(25)式から得られるx1 〜x13のそれぞれの平均値μ1 〜μ13からなる平均マトリックスμI (すなわち、正常時のμR 、点検時のμT )を作成する。平均マトリックスμI は、(26)式で示される。また、処理ユニット43は、(25)式及び(26)式から、(27)式に示される正常時及び点検時の共分散マトリックスSI (すなわち、正常時のSR 、点検時のST )をそれぞれ求める(ステップ5)。
【0069】
【数26】
【0070】
【数27】
【0071】
ここで、μR 、SR 、μT 、ST を(28)式に代入することによって、多変量カルバック・ライブラー情報量MKIを算出する(ステップ6)。
【0072】
【数28】
【0073】
(第4工程)
更に、処理ユニット43は、(28)式によって得られたMKIと、統計的一般化漸近理論(15)式から導き出される(19)式〜(21)式に示す判定基準Rk (α)、Rk (β)とを比較する。なお、(29)式に示すように、危険レベルの判定基準Rk (α)は、パラメータの数kが13であり、有意水準αを0.01とすると、70.0となる。また、(30)式に示すように、注意レベルのRk (β)は、パラメータの数kが13であり、有意水準βを0.3とすると、55.6となる。
【0074】
【数29】
【0075】
【数30】
【0076】
ここで、MKIが48.3よりも小さい場合には、正常時及び点検時の振動データの分布がほぼ同じであり、真空ポンプ11が正常であると判断する。また、MKIが55.6以上で70.0未満の場合には、正常時及び点検時の振動データの分布が異なり、真空ポンプ11に軽微な異常が発生している注意レベルであると判断する。更に、MKIが70.0以上の場合には、正常時及び点検時の振動データの分布が異なり、真空ポンプ11に重大な異常が発生している危険レベルであると判断する。これらの診断結果はモニタ44に表示される(ステップ7)。
【0077】
ここで、真空ポンプ11が危険レベルである場合には、真空ポンプ11を交換する(ステップ8)。また、真空ポンプ11が注意レベルである場合には、真空ポンプ11の余寿命予測及び精密診断を行う。精密診断は、例えば、第1及び第2のスクリューロータ19、20、モータ25、及び軸受け29〜32等の回転部について行い、異常のある箇所を特定する。余寿命予測及び精密診断により、予め予備の真空ポンプの準備や必要な部品の調達等の保全計画を立てる(ステップ9)。真空ポンプ11が正常である場合には、所定の点検時に再び真空ポンプ11を診断装置10で検査する。なお、モニタ44には診断結果の他に、パラメータx1 〜x13の結果等を表示してもよい。
【0078】
本発明は、前記した実施の形態に限定されるものではなく、本発明の要旨を変更しない範囲での変更は可能であり、例えば、前記した実施の形態や変形例の一部又は全部を組み合わせて本発明の流体回転機械の診断方法を構成する場合も本発明の権利範囲に含まれる。
例えば、前記実施の形態の流体回転機械の診断方法において、流体回転機械として、真空ポンプを使用したが、送風機、又は圧縮機等でもよい。また、流体回転機械には、気体を供給したが、液体を使用してもよい。
【0079】
流体回転機械(例えば、真空ポンプ)の状態信号としては、振動信号、電気信号、温度信号、及び圧力信号を測定したが、流体回転機械を冷却する冷却水の流量及び温度の一方又は双方を検知した信号、又は、流体回転機械に供給するガスの流量及び温度の一方又は双方を検知した信号等を測定してもよい。更に、これらの2以上を組み合わせて測定してもよい。
【0080】
また、振動信号としては、流体回転機械の振動の加速度としたが、流体回転機械の振動の変位及び速度の一方又は双方を振動信号としてもよく、これらを組み合わせてもよい。電気信号としては、流体回転機械の回転部を回転させるモータの電流値としたが、モータの電圧値及び抵抗値の一方又は双方を電気信号としてもよく、これらを組み合わせてもよい。
【0081】
また、加速度センサを第1のスクリューロータの回転軸のモータとは反対側の軸受けの上方でケーシングの上部に取付けたが、加速度を測定できればよく、第2のスクリューロータの回転軸の軸受けの上方でケーシングの上部等に取付けてもよい。また、加速度センサをケーシングの上部の1箇所に取付けたが、2箇所以上、例えば第1及び第2のスクリューロータの回転軸の水平方向、及び、第1及び第2のスクリューロータの回転軸の軸心と同一方向等のケーシングの側面に取付けて、それぞれの加速度センサで加速度を測定し、1つの多変量カルバック・ライブラー情報量として計算してもよい。
【0082】
点検時に測定される第2の状態信号群をオフラインで処理したが、オンラインで処理し、第2の状態信号群の状態信号を逐次解析して、流体回転機械をオンラインで監視してもよい。また、複数の流体回転機械をインターネット又はイントラネット等のネットワークで接続して、1つの処理装置、例えばパーソナルコンピュータで解析してもよい。第2の状態信号群をオンラインで逐次解析することによって、流体回転機械の異常の早期発見が可能となる。
【図面の簡単な説明】
【0083】
【図1】本発明の一実施の形態に係る流体回転機械の診断方法を適用した流体回転機械の診断装置の説明図である。
【図2】同流体回転機械の診断装置で使用する真空ポンプの平面図である。
【図3】同流体回転機械の診断装置で使用する真空ポンプの正面図である。
【図4】同流体回転機械の診断方法のフローチャートである。
【符号の説明】
【0084】
10:流体回転機械の診断装置、11:真空ポンプ、12:反応容器、13:基板、14:薄膜、15:化学蒸着装置、16:ガス供給口、17:ガス排出口、18:エネルギー供給部、19:第1のスクリューロータ、20:第2のスクリューロータ、21、22:回転軸、23、24:歯形部、25:モータ、26:回転軸、27:内筒部、28:ケーシング、29〜32:軸受け、33:吸入口、34:吐出口、35、36:タイミングギア、37:フィン、38:冷却水室、39:加速度センサ、40:電流センサ、41:温度センサ、41a:圧力センサ、42:A/D変換器、43:処理ユニット、44:モニタ
【特許請求の範囲】
【請求項1】
予め回転部に機械要素を有する流体回転機械の正常時に該流体回転機械の状態を示す複数の状態信号からなる第1の状態信号群を所定時間間隔でそれぞれ測定して有次元の第1の状態データ群を得た後、前記流体回転機械の点検時に該流体回転機械の状態を示す複数の状態信号からなる第2の状態信号群を所定時間間隔でそれぞれ測定して有次元の第2の状態データ群を得る第1工程と、
前記第1の状態データ群をそれぞれ無次元の第1のパラメータ群に変換した時系列の第1のマトリックスと、前記第2の状態データ群をそれぞれ無次元の第2のパラメータ群に変換した時系列の第2のマトリックスとをそれぞれ作成する第2工程と、
前記第1及び第2のマトリックスを1つの多変量カルバック・ライブラー情報量として算出する第3工程と、
前記多変量カルバック・ライブラー情報量によって前記流体回転機械の状態を判断する第4工程とを有し、
前記流体回転機械の正常時の状態信号と点検時の状態信号とを比較して前記回転機械の異常を検知することを特徴とする流体回転機械の診断方法。
【請求項2】
請求項1記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群はそれぞれ前記流体回転機械の振動信号、電気信号、温度信号、及び圧力信号のいずれか2以上を有していることを特徴とする流体回転機械の診断方法。
【請求項3】
請求項2記載の流体回転機械の診断方法において、前記振動信号は、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比のいずれか2以上の無次元のパラメータに変換されることを特徴とする流体回転機械の診断方法。
【請求項4】
請求項2及び3のいずれか1項に記載の流体回転機械の診断方法において、前記振動信号は、前記流体回転機械のケーシングに設置した加速度センサによって測定される前記流体回転機械の振動の加速度であることを特徴とする流体回転機械の診断方法。
【請求項5】
請求項1〜4のいずれか1項に記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群のそれぞれの状態信号は前記流体回転機械の1箇所又は2箇所以上で測定されることを特徴とする流体回転機械の診断方法。
【請求項6】
請求項1〜5のいずれか1項に記載の流体回転機械の診断方法において、前記第4工程における前記流体回転機械の状態判断は統計的一般化漸近理論によって行うことを特徴とする流体回転機械の診断方法。
【請求項7】
請求項6記載の流体回転機械の診断方法において、前記流体回転機械の状態判断は2段階で行われることを特徴とする流体回転機械の診断方法。
【請求項8】
請求項1〜7のいずれか1項に記載の流体回転機械の診断方法において、前記第1及び第2の状態データ群はそれぞれフィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理が行われることを特徴とする流体回転機械の診断方法。
【請求項9】
請求項1〜8のいずれか1項に記載の流体回転機械の診断方法において、前記第2の状態信号群はオンラインで処理され、該第2の状態信号群の状態信号は逐次解析されて、前記流体回転機械をオンラインで監視することを特徴とする流体回転機械の診断方法。
【請求項1】
予め回転部に機械要素を有する流体回転機械の正常時に該流体回転機械の状態を示す複数の状態信号からなる第1の状態信号群を所定時間間隔でそれぞれ測定して有次元の第1の状態データ群を得た後、前記流体回転機械の点検時に該流体回転機械の状態を示す複数の状態信号からなる第2の状態信号群を所定時間間隔でそれぞれ測定して有次元の第2の状態データ群を得る第1工程と、
前記第1の状態データ群をそれぞれ無次元の第1のパラメータ群に変換した時系列の第1のマトリックスと、前記第2の状態データ群をそれぞれ無次元の第2のパラメータ群に変換した時系列の第2のマトリックスとをそれぞれ作成する第2工程と、
前記第1及び第2のマトリックスを1つの多変量カルバック・ライブラー情報量として算出する第3工程と、
前記多変量カルバック・ライブラー情報量によって前記流体回転機械の状態を判断する第4工程とを有し、
前記流体回転機械の正常時の状態信号と点検時の状態信号とを比較して前記回転機械の異常を検知することを特徴とする流体回転機械の診断方法。
【請求項2】
請求項1記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群はそれぞれ前記流体回転機械の振動信号、電気信号、温度信号、及び圧力信号のいずれか2以上を有していることを特徴とする流体回転機械の診断方法。
【請求項3】
請求項2記載の流体回転機械の診断方法において、前記振動信号は、歪み度、尖り度、波高率、極小値率、極大値率、最大値率、安定指数、周波数波高率、等価帯域、及び周波数高低比のいずれか2以上の無次元のパラメータに変換されることを特徴とする流体回転機械の診断方法。
【請求項4】
請求項2及び3のいずれか1項に記載の流体回転機械の診断方法において、前記振動信号は、前記流体回転機械のケーシングに設置した加速度センサによって測定される前記流体回転機械の振動の加速度であることを特徴とする流体回転機械の診断方法。
【請求項5】
請求項1〜4のいずれか1項に記載の流体回転機械の診断方法において、前記第1及び第2の状態信号群のそれぞれの状態信号は前記流体回転機械の1箇所又は2箇所以上で測定されることを特徴とする流体回転機械の診断方法。
【請求項6】
請求項1〜5のいずれか1項に記載の流体回転機械の診断方法において、前記第4工程における前記流体回転機械の状態判断は統計的一般化漸近理論によって行うことを特徴とする流体回転機械の診断方法。
【請求項7】
請求項6記載の流体回転機械の診断方法において、前記流体回転機械の状態判断は2段階で行われることを特徴とする流体回転機械の診断方法。
【請求項8】
請求項1〜7のいずれか1項に記載の流体回転機械の診断方法において、前記第1及び第2の状態データ群はそれぞれフィルタリングによるノイズ除去、時間平均化、及び包絡線処理のいずれか1又は2以上の前処理が行われることを特徴とする流体回転機械の診断方法。
【請求項9】
請求項1〜8のいずれか1項に記載の流体回転機械の診断方法において、前記第2の状態信号群はオンラインで処理され、該第2の状態信号群の状態信号は逐次解析されて、前記流体回転機械をオンラインで監視することを特徴とする流体回転機械の診断方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−46955(P2006−46955A)
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願番号】特願2004−224437(P2004−224437)
【出願日】平成16年7月30日(2004.7.30)
【出願人】(000143455)株式会社高田工業所 (14)
【Fターム(参考)】
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願日】平成16年7月30日(2004.7.30)
【出願人】(000143455)株式会社高田工業所 (14)
【Fターム(参考)】
[ Back to top ]