
流体完全性を維持し、グラジエントを予備成形する液体クロマトグラフィ用溶媒送液システム
クロマトグラフィ装置用溶媒送液サブシステム720は、グラジエントを形成するように溶媒の比較的低圧高流の混合を行い、その後分離カラムへの高圧低流送液を行う。グラジエントの混合は独立しているが、グラジエント送液と干渉しない。グラジエントを形成するために、水性ポンプ715Aおよび有機ポンプ715Bの出力が混合されて貯蔵毛細管722を充填し、貯蔵毛細管722からの下流側点は大気に通気される。グラジエント形成後、大気に対する通気は閉じられ、溶媒送液システムが高圧に上昇し、水性ポンプ715Aのみがグラジエント送液のために運転する。流体流の完全性を維持するために、溶媒送液システムがフィードフォワード補償で使用され、段階的な斜面に沿うように、導管手段内の圧力および流れからなる群から選択された少なくとも1つのパラメータを制御する。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、参照として本明細書に全体を援用する、2006年3月17日出願の米国仮特許出願第60/783,610号に対する優先権を主張する。
【背景技術】
【0002】
液体クロマトグラフィ(LC)は、アナライトまたは試料を検査する分析技術である。LCシステムは普通、固定相材料を詰まられた1つまたは複数のカラムを有する。一般的に、「カラム」という用語は、クロマトグラフィ性の分離を行うためのカラム、カートリッジ、毛細管などのことを言う。カラムは普通、固定相を詰められまたはこれが装填されている。この固定相は、粒子状物質またはビード状物質、あるいは多孔質モノリスまたはほぼ不活性材料であってもよい。本開示の目的で、「カラム」という用語はまた、固定相に詰められていないまたはこれが装填されていないが、分離を行うために内部毛細管壁面の表面積による毛細管のことを言う。
【0003】
アナライトと混合された移動相材料または溶液はカラム内に汲み上げられ、固定相材料はアナライトを分離および隔離する。移動相材料は、液体、気体、超臨界流体またはその混合物などのあらゆる流体を含むことができる。しばしば、アナライトは直接カラムからインライン検出器まで溶出して、クロマトグラムを生成させる。
【0004】
普通、アナライトは僅かな量だけで利用可能であり、それによって最小量でさえも無駄にしないように細心の注意を払わなければならない。したがって、LCシステムは、参照として本明細書に援用する、米国特許第6,299,767号に記載されたようなナノ寸法毛細管であるカラムで少量の試料またはナノ流に作用するように設計されている。
【0005】
いくつかのシステムは、移動相材料またはグラジエントを正確におよび効率的に運ぶために開発された。グラジエントの送液はしばしば、例えば高圧液体クロマトグラフィ(HPLC)システムなど、高圧などの厳しい制約下にある。例えば、米国特許第6,858,435号および第6,610,201号は、溶媒組成が形成および送液される様々な技術を記載している。先入れ後出し(FIFO)は、グラジエントを形成および送液するための普通に使用される技術である。
【0006】
上に記した進歩にも関わらず、ナノ流LCシステムには多くの固有の制限が残っている。ごく普通に、グラジエントはカラムによるリアルタイムの即座の使用のために形成される。ランは1時間かかることがあるので、厳しい環境でグラジエントの適切な混合物を維持する難しさが増す。特に、ナノ流LCシステムは、ナノ寸法流変換器を利用する。
【0007】
しかし、特定の応用例に十分適切であるが、ナノ寸法変換器は限られたダイナミックレンジを有し、熱影響に有害に曝される。温度が変動する可能性がある、1時間などの普通の期間にわたるグラジエントの形成は、変換器の熱ドリフトによるひどい混合一貫性につながる。さらに、変換器が2μLの液体を保持することしかできないナノ寸法で、流体の高圧圧縮により、誤った変換器読取が生成され、それにより混合物が損なわれる。高圧動作はまた、雑音レベルが許容できなくなる可能性がある、変換器のダイナミックレンジの境界である。すなわち、変換器に関連する限られたレンジ、雑音、および熱ドリフトは、所望の性能を満たす障害物である。
【0008】
例えば、0から5nL/minのキャリブレーション範囲を有し、250nL/minの溶出流量で動作する市販のナノ流熱風速計式の変換器は、3%の初期クロマトグラフィ開始組成に対して、7.5nL/minまでの有機ポンプの繰り返し可能キャリブレーション性能が必要である。これは、達成するのが容易な性能仕様ではない。というのは、装置の雑音レベルが±5nL/minの高さであり、熱補償のない雑音に対する熱感度が±4nL/min/℃を超える可能性があるからである。したがって、器具温度の1度の変化が、ほぼ50%の組成誤差につながる可能性がある。この誤差を修正する目的で、一般的な市販の直接ナノ流LCシステムは、流量変換器を補償するために、温度感知要素での外部熱補償方式を利用している。熱感度の影響を補償する際のこのような試みにより、内在する問題に対処することなく、LCシステムの複雑性が非常に大きくなる。
【0009】
しばしば、LCシステムへのバルク流は、流れを開始および停止する、流量を変更する、および動作間の流れを移行する間に変えられる。バルクまたは溶媒流変化中に、混合点またはノードにわたって所望の組成混合物を維持することは難しい。例えば、LCシステムの定常状態背圧が極めて高い(例えば、5,000psiより大きい)場合、2つの流体流(例えば、溶媒およびアナライト)は、混合ノード前に明らかに異なる流体性状(すなわち、水性および有機溶媒)を有する。比較的ゆっくりな反応時間(すなわち、何秒かの時定数)を有する流量変換器などの固有の制限により、システムを反応良くし、所望の組成混合物を維持することを可能にするのに十分迅速には、必要なフィードバックは与えられない。
【0010】
例えば10,000PSIから200PSIまでの急速な圧力変化は、カラムなどの重要で高価な構成部品を破壊させる可能性がある。最低限でも、圧縮および減圧のサイクルは、実際に何も起こっていない場合に明らかな流れを作り出す。また、流体の圧縮性変化は誤った読取を作り出す。というのは、変換器は本質的に、背圧が普通は大きい範囲の圧力にわたって揺動するときのこのような急速な流体密度変化と、ある程度、流体の断熱昇温効果に敏感だからである。したがって、フィードバック制御を使用して多数の溶媒ポンプ間の流れを調整するLCシステムは、ナノ流変換器への急速圧縮性変化および加熱により正確な測定流を維持することができない。
【0011】
従来技術のLCシステムの別の欠点は、混合ノードにわたる流量変換器の直交流および逆流汚染であり、これによりLCシステム流体流の汚染、および変換器に対する流れキャリブレーションの一時的損失につながる。急速な減圧中、またはグラジエントの通常のクロマトグラフィ送液中に、流体の粘度が低下する(すなわち、より高い有機となる)と、従来技術のLCシステムは流れを混合ノードを通して逆流させる必要がある。変換器の逆流汚染を和らげるために、流量変換器と混合ノードの間の連結導管は、混合T字部の減圧量に対応するような寸法をしている。しかし、追加の量は変換器のものと一緒にされ、さらに上に記した急速な圧縮性変化の問題を深刻にする。したがって、従来の高圧混合システムは、極めて高い圧力で混合ノードにわたってクロス汚染(cross contamination)の影響を極めて受けやすい。
【0012】
さらに、混合ノードにわたるクロス汚染は、流体相互作用結合により生じる、2つの流量変換器の間にフィードバック不安定性を作り出す可能性がある。クロス汚染はまた、制御相互作用を積極的に安定化するように、高圧混合システムが必要とするはるかに大きい分断リストリクタに関連する大きな寄生圧力低下による、最大動作圧力の損失を大きくする。前のLCシステムは、これらの問題を認識し、グラジエント形成ポンプをLCシステムの高圧部分から隔離するように、余分なポンプ、複雑な配管方式およびバルブを提案した。このような費用がかかり複雑な解決法は望ましくないだけでなく、問題も残った。
【0013】
さらに、いくつかのLC応用例は、注入動作、例えば試料トラッピングおよび2Dクロマトグラフィの間のカラムの特定の選択に対する動作流量を変える必要がある。流量は、各カラムの選択の間で開始および停止させなければならない。従来技術のシステムは、このような流量変化を達成するために、基本的に流れのない状態でバルブ切換のいくつかの手段を利用していた。バルブ切換構成部品は、望ましくない方法で費用および複雑性を大きくしながら、LCシステムの信頼性を妨げている。
【0014】
他のシステムはまた、感度を大きくするおよび/またはより多くのデータを試料から収集する目的で開発された。例えば、米国特許第6,858,435号は、試料液体で様々な種を適当に感知する際に検出器が有することがある問題を克服するために、可変流またはピークパーキングを利用するLC分析システムを開示している。LC分析システムが興味のあるピークを検出する場合、LC分析システムは、溶出流量を迅速に減少させる(すなわち、20から50分の1の流れの減少)ようにマイクロ切換バルブを制御する。その結果、カラム分離化合物の溶出時間は検出を良くするために延長される。分析後、LC分析システムは通常の溶出流量を復元する。また、望ましくないピークパーキングを達成する追加の構成部品の利用により、システムの費用および複雑性が増す。
【0015】
LC分析の効率を良くする別の方法は、0.025から100ul/minの流量などのマイクロスケールまたはナノスケールの流量を利用することである。このような流量を使用することによって、LC分析システムは超高感度分析を実現することができる。しかし、グラジエント遅延および分散が問題となる。さらに、試料装填時間、およびそれによって全体の実行時間は望ましくないほど長くなる。
【0016】
上の説明から分かるように、閉ループフィードバック機構がLC分析システムに対して開発された。しかし、さらに優れた制御の必要があり、従来技術のシステムはフィードフォワード開ループ機構を使用していない。フィードフォワードは、誤差を最小限に抑えるまたは防ぐように、システム内の変化に反応するための方法である。
【発明の開示】
【発明が解決しようとする課題】
【0017】
上記を鑑みて、従来技術の上記問題を克服するクロマトグラフィ装置に溶媒を送液するシステムが必要である。
【課題を解決するための手段】
【0018】
本発明は、液体クロマトグラフィ装置に溶媒を送液するシステムおよび方法を提供することによって、上記およびその他の問題に対処する。発明者は、従来の閉ループフィードバック制御で、流体圧縮性の影響を補償するためにフィードフォワード制御方法を使用することによって、溶媒の最終的な調整および送液をかなり改良することができることを発見した。
【0019】
一実施形態では、対象技術は、試料を分離カラム内に案内するインジェクタを有する液体クロマトグラフィ装置にグラジエントを送液するシステムを対象としている。このシステムは、第1のインライン圧力変換器および第1の流量変換器を通して案内される水性出力を作り出す水性ポンプを有する第1の行程(leg)と、第2のインライン圧力変換器および第2の流量変換器を通して案内される有機出力を作り出す有機ポンプを有する第2の行程と、行程を制御する処理装置とを備えている。処理装置は、変換器の少なくとも1つの上流側で寄生損失を克服するように変換器の少なくとも1つから導き出された信号に基づいて、修正制御信号を発生させる閉ループフィードバックモードと、システムの蓄積エネルギーのパラメータに基づいて予測制御信号を発生させる開ループフィードフォワードモードを含み、予測制御信号は水性出力と有機出力の間の圧縮比に基づき圧縮流を算出し、処理装置は異なるモードで各行程を選択的に操作することができる。
【0020】
別の実施形態では、対象技術は、ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第1の行程と、ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第2の行程と、変換器からの信号に基づいて各ポンプに指示を与えるコントローラと、第1および第2の行程からの出力を混合するノードとを備えた流体クロマトグラフィ機器を対象としており、コントローラは、ノードにわたって組成制御を維持するために、エネルギーを蓄積して第1および第2の行程内の流体の圧縮性を制御する第1および第2の行程の能力に基づいて、第1および第2のポンプにフィードフォワード信号を提供することができる。
【0021】
一実施形態では、圧縮および再圧縮のサイクルは、流体外乱を最小限に抑えるようにフィードフォワードアルゴリズムおよび/またはリニアバルブを使用することによってしっかり制御されている。さらに、スマートに使用するとポンプなどのいくつかの構成部品が、追加の構成部品の必要性を少なくすることができる。
【0022】
別の実施形態では、ナノ流溶媒送液システム内にグラジエントを予備成形する改良型のシステムにより、グラジエントを効率的に作り出し送液することが可能になる。さらに、ポンプなどの追加の構成部品を加えることによって、溶出運転およびセットアップ時間を少なくするのと同時に前の連続動作を行うことができる。
【0023】
したがって、一態様では、本発明は貯蔵毛細管を充填するポンプを有する液体クロマトグラフィシステムにグラジエントを形成する方法を提供する。この方法は、貯蔵毛細管を大気に通気させるステップと、グラジエントが中に形成されるまで貯蔵毛細管を充填するように比較的低い圧力およびより高い流量でポンプを運転させるステップとを含んでいる。貯蔵毛細管の最適化した容量幾何形状は、背圧の形成およびグラジエント分散を最小限に抑えるような長さおよび内径の寸法をしていることが好ましい。別の実施形態では、貯蔵毛細管の捕捉容量は、グラジエントおよびグラジエントを分離カラムに移動させるのに必要な輸送容量のオーバーヘッドに対応するような寸法をしている。
【0024】
ポンプは実際、水性ポンプおよび有機ポンプであってもよく、各ポンプはポンプと貯蔵毛細管の中間で混合ノードに連結されている出力を有する。グラジエント送液中、有機ポンプはオフラインであり、大気への通気は閉じられ、水性ポンプはグラジエントを分離カラムまで送液するように運転する。貯蔵毛細管をパージするために、貯蔵毛細管は大気に通気され、ポンプの少なくとも1つが別のグラジエントを形成する準備のために運転される。
【0025】
基本的に大気に通気された貯蔵毛細管でのグラジエントの形成により、以下の3つの重要な機能が達成される。1)カラムまたは他の連結された消耗品とは別に、背圧の形成が貯蔵毛細管の幾何形状により正確に制御される。2)注入運転間のカラムの平衡状態を狂わせるのを防ぐために、貯蔵毛細管内の流体がパージされて廃棄される。3)形成中の流れの開始および停止による、形成されたグラジエントをひとまとめにするあらゆる先行または後行組成異常が、システムの一次流体流から離れるように、すなわち分析部分およびその中のカラムから離れるように案内される。
【0026】
さらに、低圧でのグラジエント形成の分離、および高圧でのグラジエントのアイソクラテック送液により基本的に、高圧混合および送液の従来の方法と比べて、流量の変化に対する溶媒混合物組成精度の相互依存結合がなくなる。すなわち、対象技術は、運転中にグラジエント混合物を変えない、送液と直交したグラジエント形成を行う。
【0027】
対象技術の別の利点は、変換器のフルスケールキャリブレーションにより近くで高い流量のグラジエントを形成する溶媒送液システムを提供することであり、それによって変換器のゼロ流キャリブレーションでの、またはそれに近くでの性能を拡張する必要とする、溶出流量のはるかに下に流量変換器のダイナミックレンジを拡張する必要性がなくなる。このようにして雑音および熱ドリフトに非常に影響を受けやすい変換器領域を避けることによって、グラジエント組成精度を改善しながら、流量変換器の熱補償および特徴への必要性および追加費用がなくなる。
【0028】
対象技術の別の利点は、グラジエントを作り出すための短い時間間隔であり、それによって実際に熱効果によるクロマトグラフィ保持時間の変動がなくなる。グラジエントを短い時間間隔で形成することによって、温度効果に対する感受性が取り除かれる。したがって、熱補償に対する必要性も少なくなるかまたはなくなる。
【0029】
低圧でのグラジエント形成および単一ポンプによるその後の送液の別の利点は、混合T字部にわたる所望の組成混合物を維持する容易性である。
【0030】
別の態様では、本発明はグラジエントをナノ流毛細管液体クロマトグラフィ装置に与えるシステムを提供する。このシステムは、第1の出力を作り出す水性ポンプと、溶液を作り出す第1の出力と混合された第2の出力を作り出す有機ポンプと、ポンプを制御する処理装置とを備えている。貯蔵毛細管は、溶液の一部から形成されたグラジエントを受ける。接続金具は貯蔵毛細管の出力に接続されており、接続金具はナノ流毛細管液体クロマトグラフィ装置に接続された第1の出口、および第2の出口を形成する。バルブは、第2の出口に接続し、貯蔵毛細管内でのグラジエントの形成中に、水性および有機ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御される。
【0031】
システムはまた、第1の出力を受ける第1のインライン圧力変換器および第1の流量変換器と、第2の出力を受ける第2のインライン圧力変換器および第2の流量変換器とを有し、各変換器は閉ループフィードバック制御を行うように処理装置と通信していることが好ましい。一実施形態では、貯蔵毛細管、接続金具およびバルブは、分離カラムの熱管理区画内に共に配置されている。
【0032】
対象技術の別の利点は、極めて迅速な流れ変化、定常流動作への戻り、および上記の重大な混合物汚染および安定性制御の問題の除外を可能にする圧力および流量変換器両方を有する制御手段での単一ポンプによるグラジエント送液を行うことである。その結果、対象技術は、従来の高圧混合システムと比べて、極めて高い圧力で可変流れまたはピークパーキング動作を行う要件に容易に対応する。さらに、システムの高圧部分からのグラジエント形成ポンプの所望の隔離を有する試みにおいて、余分なポンプ、複雑は配管方式およびバルブに対する必要性がなくなる。
【0033】
別の態様では、本発明はLC装置用の溶媒送液サブシステムを提供する。溶媒送液サブシステムは、第1の出力を作り出す第1のポンプと、そのパラメータを監視するために第1の出力を受けるように接続された第1の変換器と、溶媒混合物を作り出すために第1の出力と混合された第2の出力を作り出す第2のポンプと、そのパラメータを監視するために第2の出力を受けるように接続された第2の変換器と、第1および第2の出力を組み合わせる混合ノードと、第1と第2のポンプの間の受動流体分離を行って混合ノードにわたる制御相互作用を安定化するように、各ポンプと混合ノードの間の制限導管とを備えている。導管は、第1および第2の変換器の上流側の毛細管リストリクタであることが好ましい。
【0034】
対象技術の別の利点は、混合ノードにわたる流量変換器の直交流および逆流汚染を防ぐことである。さらに別の利点は、流れコントローラの間のフィードバック不安定性を防ぐことである。さらに別の利点は、大きな分離リストリクタの必要性を軽減することによって、より大きな分離リストリクタの大きな寄生低下の原因である最大作動圧力の損失を少なくすることである。
【0035】
本発明の別の態様は、試料を分離カラムに案内するインジェクタを有する、液体クロマトグラフィ装置にグラジエントを送液するシステムを提供する。システムは、第1のインライン圧力変換器および第1の流量変換器を通して案内される第1の出力を作り出す水性ポンプと、第2のインライン圧力変換器および第2の流量変換器を通して案内される第2の出力を作り出す有機ポンプと、変換器の上流側の損失を回避するように、変換器の少なくとも1つからの信号に基づき閉ループフィードバックモードでポンプを制御する処理装置とを備えている。
【0036】
システムは、第3の出力を作り出すように第1および第2の出力を混合する第1の接続金具と、グラジエントを形成する貯蔵毛細管とを有する。グラジエントは第3の出力の一部である。貯蔵毛細管は、背圧および分散を最小限に抑えるような寸法をしている。第2の接続金具は貯蔵毛細管に接続されており、第2の接続金具は2つの出口を形成し、第1の出口はナノ流毛細管液体クロマトグラフィ装置に接続されている。バルブは、第2の接続金具の第2の出口に接続され、処理装置によって制御される。貯蔵毛細管内にグラジエントを形成する際、バルブは水性および有機ポンプが運転している間に、留まっている流体を案内して廃棄するように開かれる。ナノ流毛細管液体クロマトグラフィ装置へのグラジエントの送液中に、水性ポンプのみが運転し、有機ポンプはオフラインである。
【0037】
対象技術のさらに別の実施形態は、ナノ流毛細管液体クロマトグラフィ装置の第1のカラムを適合させるように、グラジエントの送液の作動流量を変えるシステムを対象としている。システムは、圧力変換器および流量変換器を通して案内される出力を作り出すポンプと、出力の一部からグラジエントを形成する貯蔵毛細管と、ポンプを制御して、変換器から信号を受ける処理装置とを備えている。
【0038】
処理装置は、指示セットを記憶するメモリ、および指示セットを実行するプロセッサを有する。プロセッサは、ナノ流毛細管クロマトグラフィ装置の第2のカラムが再平衡された場合に、注入の最後に圧力変換器からシステム圧力測定値を記憶するように動作する。プロセッサはまた、ナノ流毛細管クロマトグラフィ装置への流れを止め、特に第1のカラムに適合された新しいグラジエントを形成し、目標圧力をシステム圧力測定値と等しくなるように設定し、第1のカラムに対してユーザによって選択された流量を受けるおよび記憶し、圧力変換器からフィードバックでの閉ループ圧力制御においてポンプを使用して、システム圧力を第1の目標圧力にするように動作する。第1の目標圧力に到達する際に、処理装置は、ポンプを運転することによって新しいグラジエントの送液を再開するように、流量変換器をフィードバックとしてまた流量を目標流量として閉ループ流制御にポンプを移行する。
【0039】
システムはまた、第2の圧力変換器および第2の流量変換器を通して案内された出力を作り出す第2のポンプと、ポンプの出力を組み合わせるように貯蔵毛細管に連結された混合ノードと、貯蔵毛細管に連結されたバルブとを有することが好ましい。バルブは、システムの作動圧力より下の圧力に貯蔵毛細管に通気させるように、プロセッサによって制御される。
【0040】
システムの複雑性を加えることなく、単純で、効率的および迅速な方法で流量を変えることを実現することが、対象技術の別の利点である。さらに別の利点は、捕捉応用例において長い時定数を乗り越えることができることである。
【0041】
本発明のさらに別の態様は、抑制カラムと直列な短い捕捉カラムを有するクロマトグラフィ装置用の溶媒送液システムを提供する。溶媒送液システムは、第1の出力を作り出す第1のポンプと、第1の出力を受けるように連結された圧力変換器および流量変換器とを備えている。第2のポンプは、溶媒混合物を作り出すように、第1の出力と混合された第2の出力を作り出す。第2の圧力変換器および第2の流量変換器は、そのパラメータを監視するために第2の出力を受けるように連結されている。混合ノードは第1および第2の出力と組み合わされる。コントローラは、閉ループフィードバックでポンプを作動させる。コントローラは、圧力制御モードで閉ループフィードバックに圧力変換器を使用し、流れ制御モードで閉ループフィードバックに流量変換器を使用し、グラジエントを形成するように流れ制御モードで両方のポンプを使用し、グラジエントを送液するように第1のポンプのみを使用し、圧力制御モードを使用して抑制カラムと直列な短い捕捉カラムを迅速に減圧することによって流れを止め、基準圧力設定点をゼロに設定し、抑制カラムと直列な短い捕捉カラムの長い時定数を乗り越えるために第1のポンプの動作を開始するようにプログラミングされている。
【0042】
さらに別の態様では、本発明は、混合物からグラジエントを予備成形するステップと、閉ループフィードバックに流量変換器を使用することによって流量を制御するステップと、圧力変換器を使用することによって送液圧力を監視するステップとを含む、液体クロマトグラフィシステムでのピークパーキング(時々、可変流と呼ばれる)方法を提供する。関心のある溶出ピークに基づいて流量を少なくする信号に基づき、目標圧力は送液圧力に基づき算出される。流量は、目標圧力を設定点とした閉ループフィードバックとして圧力変換器を使用することによって制御される。
【0043】
本発明の実施形態はまた、組成を制御する、または流体混合物の完全性を維持する方法および装置を対象としている。混合物を形成する化合物の圧縮性の差により、化合物は異なるように流れる可能性がある。例えば、有機化合物は普通、水溶液より圧縮性がある。有機化合物を含むブランチ、および水性化合物を有するブランチを有する導管内で流れが突然止まると、有機化合物を含むブランチは、圧力変化に関連する容量のより大きな変化を受ける可能性があり、異なるようにエネルギーを蓄積する可能性がある。容量および蓄積したエネルギーのこのような変化は、所望の組成から外れる混合物につながる。
【0044】
一実施形態は、少なくとも1つの作動圧力、1つの低圧および流量を含む圧力範囲で導管手段内で運ばれている流体流の内容で使用される装置を対象としている。導管手段は、圧力を受けて流体を推進させるポンプ手段と流体連通している。導管手段は、バルブ手段と流体連通しており、バルブ手段は少なくとも第1の位置および第2の位置を有する。第1の位置では、流体は導管手段内で流れ、第2の位置では、流体は導管手段内に流れない。装置は、制御手段および傾斜(ramp)手段を備えている。制御手段は、バルブ手段と信号通信しており、傾斜手段と信号通信している。傾斜手段は、導管手段内の圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するためのものである。傾斜手段は、(i)第2の位置へのバルブ手段の配置または予測配置に応じて、前記導管手段が前記1つまたは複数の作動圧力にある間に、このような低圧が得られるまで制御手段が第1の斜面内の前記導管手段における選択パラメータを減少させるように前記傾斜手段に命令する、および(ii)第1の位置をとるバルブ手段に応じて、または第1の位置をとるバルブ手段を予期して、1つまたは複数の作動圧力が第2の斜面で得られるまで選択パラメータを増加させるという機能の少なくとも一方を行う。
【0045】
本明細書で使用するように、「ポンプ手段」という用語は、流体を推進させるあらゆる手段のことを言う。これらの手段は、直列および並列ポンプ、タービンポンプ、シリンジポンプ、蠕動ポンプ、動電ポンプ、空気圧増幅器、および圧縮貯蔵装置を通して推進される流体を含んでいる。「流体連通」という用語は、配管タイプの流体接続のことを言う。「バルブ手段」という用語は、流体の流れを遮ることが可能なあらゆる装置を示すのに使用される。クロマトグラフィ機器は、特別な形のバルブである試料インジェクタを有する。
【0046】
本明細書で使用されているように、「制御手段」という用語は、コンピュータ、演算処理ユニット(CPU)、マイクロコントローラ、デジタル信号プロセッサ(DSP)、サーバ、適切なファームウェアまたはソフトウェアでプログラミングされたアナログ装置のことを言う。分析機器はしばしば、動作の態様を制御するコンピュータおよびCPUを有する。ローカルまたは一括コンピュータにより単一の機器および多数の機器を制御するソフトウェアは、当技術分野でよく知られている。「信号通信」という用語は、電気接続または回路、光学接続、電波による無線通信、インターネット接続、および機器がそれによって通信することができる他の手段のことを言う。
【0047】
傾斜手段の別の実施形態は、ポンプ制御手段を備えている。ポンプ制御手段は、別個のコンピュータ、演算処理ユニット(CPU)、マイクロコントローラ、DSP、サーバ、または他の機能を制御する同じ制御手段であってもよい。ポンプ制御手段は、第1の斜面または第2の斜面の少なくとも一方で、圧力を受けて導管手段内に少なくとも1つの流体を配置するように1つまたは複数のポンプに命令するためのものである。圧力を小さくする、または流れを小さくするために、特に小径導管手段を備えたポンプ制御手段は、汲み上げ方向に反転する必要がある可能性がある。
【0048】
本発明の一実施形態は、捕捉カラムからの流れを制御するバルブの形のバルブ手段を特徴としている。本発明の別の実施形態は、試料注入手段の形のバルブ手段を特徴としている。試料注入手段は、試料マネージャ、オートサンプラ、試料モジュールなどのいくつかの名前で、当技術分野で知られている。試料注入手段は、試料が中に配置された導管のループを備えたマルチポートバルブの形をしている。試料をループ内に配置した状態で、マルチポートバルブはポンプ手段と流体連通した導管手段と流体連通したループで配置されている。試料注入手段は、第1の位置および第2の位置を有する。第1の位置では、試料注入手段は、大気圧から低圧までを含む圧力範囲で流体試料を受ける。第2の位置では、試料注入手段は、流体試料をその中に配置するように導管手段と流体連通している。
【0049】
本発明装置の一実施形態は、試料注入手段に引かれた特性を有する。試料注入手段は、試料手段内に圧力を配置するように圧力源で流体制御している。圧力源は、制御手段と信号通信しており、制御手段は試料注入手段を大気圧、または試料を受けるための初期圧力にするように圧力源に命令する。また、試料を受けた後に、制御手段は、圧力を導管手段内の圧力に対応する低圧まで大きくするように圧力源に命令する。
【0050】
装置はさらに、制御手段と信号通信している少なくとも1つの圧力センサを備えていることが好ましい。圧力センサは、流体連通している、すなわち、ポンプ手段、導管手段、およびバルブ手段の少なくとも1つの圧力を測定する。
【0051】
装置は、ポンプ手段を備えていることが好ましい。本発明の一実施形態は、第1の溶媒用の第1のポンプ、および第2の溶媒用の第2のポンプを少なくとも備えたポンプ手段を特徴とする。導管手段は、前記第1のポンプと流体連通する少なくとも1つの第1のブランチと、前記第2のポンプと流体連通する第2のブランチとを備えている。第1のブランチおよび第2のブランチは、T字接続金具で流体連通しており、前記第1の溶媒および第2の溶媒は、流体を含む混合物を形成する。
【0052】
1つのポンプは、圧力に対して傾斜された制御のために前記第1および第2のポンプから選択されていることが好ましい。少なくとも1つのポンプは、流れに基づく制御のために選択されていることが好ましい。流れに対して傾斜されている制御に対して、このようなポンプの流れは圧力に対して傾斜されているポンプの流れを追跡するように制御されていることが好ましく、流体の圧縮量をさらに補償することが好ましい。すなわち、ポンプ追跡流れは、溶媒の圧縮量と非圧縮量の間の差を示す、合計流体プラス流体の追加量の割合としてポンプに期待される、溶媒に対する流れを追跡する。圧力に対して傾斜されたポンプは、水性溶媒のためのものであることが好ましい。また、流れに対して傾斜されたポンプは有機溶媒のためのものである。
【0053】
また、装置は、制御手段と信号通信しており、ポンプ手段、導管手段またはバルブ手段と流体連通している少なくとも1つの流れセンサを有することが好ましい。流れセンサにより、流れの整合が可能になる。本明細書で使用されているように、流れセンサはまた、流れに関連している可能性があるピストン移動に関連するステッピングモータを備えることができる。
【0054】
本発明の装置は、バルブ手段の開閉を導管手段内の圧力斜面と調整する傾斜手段を特徴としている。斜面は、圧力低下の増加が急速ではなく、約10,000ポンド毎平方インチ(psi)毎秒以下の時間にわたる圧力の傾斜を有する意味では緩やかである。傾斜は、10から1,000psi毎秒であることがより好ましく、100から500psi毎秒であることがさらに好ましい。
【0055】
本発明の別の実施形態は、流体の完全性を維持する方法を対象としている。この方法は、少なくとも1つの作動圧力および1つの低圧を含む圧力範囲において、導管手段内で運ばれる流体流の内容で使用される。導管手段は、圧力を受けて流体を推進させるポンプ手段と流体連通している。導管手段は、バルブ手段と流体連通しており、バルブ手段は少なくとも第1の位置および第2の位置を有する。第1の位置では、流体は導管手段内に流れ、第2の位置では、流体は導管手段内には流れない。この方法は、導管手段内で圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するステップを含んでいる。パラメータは、
(i)第2の位置へのバルブ手段の配置または予測配置に応じて、導管手段が前記1つまたは複数の作動圧力にある間に、低圧が得られるまで第1の斜面内の導管手段における選択パラメータを減少させる、および(ii)第1の位置をとるバルブ手段に応じて、または第1の位置をとるバルブを予期して、導管手段が低圧にある間に、第2の斜面で1つまたは複数の作動圧力が得られるまで選択パラメータを増加させるステップの少なくとも一方で制御される。
【0056】
したがって、本発明の実施形態は組成を制御すること、または流体混合物の完全性を維持することを対象としている。混合物を形成する化合物の圧縮性の差により、化合物が異なって流れる可能性がある。このような量および蓄積エネルギーの変化は、所望の組成とは違った混合物につながる可能性がある。本発明の実施形態は、流れを中断する前に導管、ポンプおよびバルブの蓄積エネルギーを次第に少なくする。本発明のこれらおよび他の特性は、図面を検討し、以下の詳細な説明の内容を検討すれば明らかになるだろう。
【0057】
対象技術の別の実施形態は、グラジエントを作り出す注入バルブと、注入バルブと流体連通している分析カラムと、グラジエントを分析カラムに向かって押し込むように注入バルブに連結されたポンプと、グラジエントを貯蔵するための注入バルブと分析カラムの間にある装置とを備えたLC機器を対象としている。
【0058】
本発明は、これに限らないが、現在知られているまたは後に開発される応用例に対するプロセス、装置、システム、デバイス、方法、またはコンピュータ読取可能媒体などの多くの方法で実施および利用することができることを理解すべきである。本明細書に開示したシステムのこれらおよび他の独自の特性は、以下の説明および添付の図面からより簡単に明らかになるだろう。
【発明を実施するための最良の形態】
【0059】
本発明は、ナノ流毛細管LC機器に対する送液解決法に関連する従来技術の問題の多くを克服する。本開示は、望ましくない混合が起こったときを認識し、このような混合を防ぐためのポンプ設定を利用することによって流体混合物の完全性を維持する。本開示はまた、LC機器のスループットを大きくするために、低圧および高い流れでのグラジエントの予備成形を示している。本明細書で開示するシステムの利点および他の特性は、本発明の代表的な実施形態を記載している図面と合わせて、特定の例示的な実施形態の以下の詳細な説明から当業者にはより簡単に明らかになるだろう。
【0060】
上流、下流、左、右、上および下などの本明細書の相対的な説明は全て、図面を参照したものであり、限定する意味合いのものではない。加えて、明確にするために、フィルタ、導管および相互接続部などの一般的なものは、関連する技術分野の当業者に分かるように、図面には特に含めなかった。そうでないと特定されない限り、図示した実施形態は、特定の実施形態の様々な詳細の例示的な特性を提供するものとして理解することができ、したがって、図示した特性、構成部品、モジュール、要素、サブシステム、および/または態様はあるいは、開示したシステムまたは方法から実質的に逸脱することなく、組み合わせる、相互連結する、配列する、分離する、置き換える、位置決めする、および/または再び配置することができる。
【0061】
リニアバルブ実施形態
図1Aから図2Bを参照すると、対象技術によるリニアバルブ127を使用する正流ナノスケールHPLC機器111が示されている。リニアバルブ127により、HPLC機器111が所望の作動圧力間で効率的に移行することが可能になる。HPLC機器は、最近機器が15,000ポンド毎平方インチ(PSI)での動作が可能である市場に導入されたように、5,000PSIを超える圧力で動作することができると考えられる。
【0062】
図1Aおよび図1Bを参照すると、機器111は、導管を通してそれぞれのリザーバ135a、135b内に入れられたそれぞれの溶媒A、Bを移動させるポンプ115a、115b(バイナリポンプ115と総称する)を有する。ポンプ115a、115bは、直列および並列ポンプ、タービンポンプ、シリンジポンプ、蠕動ポンプ、動電ポンプ、空気圧増幅器、および圧縮貯蔵装置を通して推進される流体を含んでいる。クロマトグラフィ応用例で使用される典型的なポンプは、ステッピングモータによって動力が与えられる直列ポンプである。これらのポンプ115a、115bは、いくつかの製造供給元から市販されている。マサチューセッツ州MilfordのWaters Corporation社は、ALLIANCE(商標)、ACQUITY(商標)および600(商標)モデルポンプという商標で適切なポンプを販売している。
【0063】
導管は、ポンプ115a、115bをリザーバ135a、135b、およびHPLC機器111の他の構成部品と相互連結させる。これらの溶媒は、クロマトグラフィ分離で使用されるあらゆる溶媒を含むことができる。典型的な溶媒は、1つの溶媒として水溶液(例えば、水)および有機溶媒(例えば、メタノール、アセトニトリルなど)を含むことができる。導管としては、幅広い範囲の圧力で流体流を運ぶための管、パイプ、毛細管およびマイクロ流体構造物などの構造物が挙げられる。低圧は大気圧であってもよいが、また大気圧より数百以上も上の値であってもよい。単純にするために、導管は図面中において普通は分類せず、構成部品を相互連結するラインとして示されている。
【0064】
普通、導管はステンレス鋼またはシリカであるが、他の材料を簡単に代用することもできる。これらの材料としては、例えばこれに限らないが、真鍮、アルミニウム、銅、チタン、セラミックおよびプラスチックが挙げられる。導管はあらゆる寸法を有することができるが、本発明の実施形態は、導管が小さな内径である特定の用途を有する。例えば、これに限らないが、導管またはその一部は0.005から0.010インチの直径のステンレス鋼配管である。導管の他の部分は、約25マイクロメータのシリカ毛細管である。一実施形態では、導管は、分析プロセスを行う場合は50ナノリットル/minから5マイクロリットル/min、および材料を試料から隔離する場合は4マイクロリットル/minから20ミクロリットル/minまでの概算範囲の流量を運ぶ。
【0065】
図示するように、ポンプ115a、115bからの流体の圧力および流れを、ポンプ115a用の圧力変換器131aおよび流量変換器133a、およびポンプ115b用の圧力変換器131bおよび流量変換器133bなどの圧力センサおよび流れセンサによって監視することができる。ポンプ115a、115bおよび変換器131a、131b、133a、133bは、制御手段125と信号通信している。信号通信は、点線によって示されている。ピストンタイプのポンプでは、制御手段125は、信号によりピストンを前または後に移動させるようにポンプ115a、115bに命令する。その結果、ポンプ115a、115bは圧力および/または流れを正確に制御するように閉ループフィードバックを使用する。
【0066】
制御手段125は、コンピュータ、演算処理ユニット、マイクロコントローラ、デジタル信号プロセッサ、サーバ、適切なファームウェアなどでプログラミングされたアナログ装置のことを言う。分析機器で使用されるコンピュータは、よく知られており、いくつかの普通の製造供給元から市販されている。制御手段125は、図3により圧力および流れを監視および制御するように、圧力センサまたは変換器131aおよび131bおよび流れセンサまたは変換器133aおよび133bと信号通信している。命令は、制御手段125のファームウェア、またはソフトウェア製造者によって提供されるツールキットによりオペレーティングソフト内にプログラミングされている。この性質のプログラミングは、当業者によるルーチンである。機器制御ソフトウェアは、EMPOWER(商標)またはMILLINNIUM(商標)の商標で、マサチューセッツ州MilfordのWaters Corporation社などのいくつかの製造供給元から市販されている。
【0067】
さらに図1Aおよび図1Bを参照すると、ポンプ115a、115bの出力は導管手段117aから117gを介してT字接続金具123内に流れる。実際、溶媒Aおよび溶媒Bは、混合物を形成するようにT字接続金具123で一緒になる。混合物はその後、傾斜手段として働くリニアバルブ127に入る。「傾斜手段」という用語は、時間の経過と共に次第に選択したパラメータを減少または増加させる手段のことを言う。斜面期間は、これらの変化が行われる期間である。斜面期間は普通、少なくとも5秒であるが、特定の応用例によってはるかに短いまたは長くてもよい。理想的な斜面期間は、流体容量、流量および圧力の大きさに基づいている。明確なものとして示しているが、機器111は別個のリニアバルブ127を備えていない傾斜手段を備えるように構成および動作させることができると考えられる。
【0068】
リニアバルブ127は選択的に、混合物を廃棄するように、または試料インジェクタバルブ119を捕捉カラム165および捕捉バルブ121で使用するために運ぶことができる。リニアバルブ127は、ある範囲の開口を有し、流れを廃棄または再利用するように分岐することによって導管内の圧力を増減させることが可能である。リニアバルブ127は、制御手段125と信号通信し、それにより開くまたは閉じる命令を受ける。リニアバルブ127は、当技術分野で知られており、オハイオ州CincinnatiのValco社などのいくつかの製造供給元から市販されている。
【0069】
リニアバルブ127は、流れを次第に制御することができることを特徴としている。したがって、装置111の圧力および流れは、図3に示す方法で制御することができる。リニアバルブ127は、制御手段125の特定の部分129によって制御されることが好ましい。リニアバルブ制御部分129は、図示するように、個別のコンピュータ、演算処理ユニット(CPU)、サーバ、または他の機能を制御する同じ制御手段125であってもよい。
【0070】
リニアバルブ127が、機器111内での前向きの流れを可能にするように設定されると、混合物は捕捉バルブ121と組み合わせて捕捉カラム165で使用するように、リニアバルブ127を通して試料インジェクタバルブ119に運ばれる。試料の成分が再生可能な方法で解放されるように、混合物の組成を制御することが望ましい。圧力および流れの追跡が、機器111の導管内の流体の完全性を維持する。
【0071】
普通、「試料インジェクタ」は、試料を保持する導管の一部をカラムの上流側で導管と流体連通するように使用されるバルブおよび導管の形のことを言う。「バルブ」という用語は、流れを制御する、抑制するまたは止める手段のことを言う。試料インジェクタは通常、マルチポートバルブ、および試料を保持する導管のループ(図示せず)を備えている。試料インジェクタバルブ119は、試料インジェクタバルブ119に圧力をかける圧力源151と流体連通している。この圧力は、制御手段125およびリニアバルブ127によって適合させることができる。圧力源151は、圧縮流体のあらゆるポンプまたは源を備えることができる。好ましくは、圧力源151は、当技術分野で知られておりいくつかの製造供給元から市販されているシリンジポンプ(図示せず)である。「圧力源」という用語は、あらゆるポンプ、シリンジまたは圧縮空気または流体タンクなどのことを言う。試料インジェクタ119は普通、試料を引き出すまたは吸引するシリンジを有する。
【0072】
試料インジェクタバルブ119および捕捉バルブ121はそれぞれ、少なくとも第1の位置および第2の位置を有する。第1の位置では、流体は流れ、第2の位置では流体は流れない。試料インジェクタバルブ119は、全体の分離モジュールの構成部品または一部としていくつかの製造供給元によって販売されている。1つの試料インジェクタバルブは、ACQUITY(商標)およびALLIANCE(商標)の商標で、マサチューセッツ州MilfordのWaters Corporation社によって分離モジュールの構成部分として販売されている。捕捉バルブは、Valcoを含むいくつかの製造供給元によって販売されている。試料注入バルブ119は、試料を導管のループ(図示せず)内に配置する。
【0073】
リニアバルブ127は、機器111が1つまたは複数の作動圧力にある間に、第2の位置への試料インジェクタバルブ119および捕捉バルブ121への配置または予測配置に応じて、導管手段117aから117g内の流れおよび圧力の群から選択した少なくとも1つのパラメータを制御する。捕捉バルブ121はまた、流れを廃棄するように、または溶媒溶液内で摂動することなく分析カラム2657および検出器169に選択的に案内することができる。したがって、捕捉カラム2655上で捕捉された関心のある化合物を効果的に分析することができる。
【0074】
一実施形態では、1つのポンプは、圧力に対して傾斜された制御のために前記第1のポンプ115aおよび第2のポンプ115bから選択され、もう一方は流れに対して傾斜された制御のために選択される。流れに対して傾斜された制御では、このようなポンプの流れは圧力に対して傾斜されたポンプの流れと一致するように制御されることが好ましい。圧力に対して傾斜されたポンプは、水溶性溶媒用であることが好ましい。また、流れに対して傾斜されたポンプは、有機溶媒用である。例えば、溶媒Aは水溶性溶媒である。ポンプ115aは、図3の斜面141aに従うように、制御手段125によって命令される。ポンプ115bは、斜面141b上の流れに対してポンプ115aを追跡する。制御手段125は、混合物組成のためにポンプ115aの送液に対応するようにポンプ115bの送液を調整することによって、溶媒Aおよび溶媒Bの正確な混合を維持するようにポンプ115bに命令する。加えて、ポンプ115bは、ポンプ115bの容量が変わるときに、導管手段117aから117gおよびポンプ115b内の溶媒Bによって示される圧縮または非圧縮容量を汲み上げる、または引き出す、または加える。
【0075】
次に図2を参照すると、図1Aおよび図1Bの機器111の動作のサイクルのための方法が示されている。最も一般的に、この方法は、大きな範囲の圧力および/または流れで導管内で運ばれる流体流の内容で使用されるものである。HPLCでは、この方法は捕捉および溶出の異なる処理ステップ中に必要である異なる状態にも関わらず、流体の完全性を維持することを対象としている。図3では、図2の方法の間の圧力プロファイル170および流れプロファイル172を示すタイミング図が、記した図2のステップに対応する領域で示されている。
【0076】
図2および図3を参照すると、ステップS1では、コントローラ125は機器111の現在の圧力および流体負荷条件を記録する。普通、現在の条件は前の溶出運転中に望ましいものである(例えば、高い圧力および低い流れ)。したがって、捕捉バルブ121は、流れが分析カラム2657に案内されるように設定される。溶出運転条件から捕捉条件まで移行するために(例えば、比較的低い圧力および高い流れ)、スロッシングおよび逆流により混合物の完全性を損なうことなく、機器流体内に蓄積される蓄積エネルギーを解放するために大きな注意を払わなければならない。またはさらに悪いことに、逆流が過剰になると、カラム2657などの機器構成部品に対する損傷が生じる可能性がある。
【0077】
図3はまた、現在の条件が、網目領域174によって示されたような機器始動に関連するものであってもよいことを示している。領域174は、ステップS1の初期部分S1a中の始動条件では、流れはゼロであるが、分析流れまで傾斜されていることを示している。すなわち、網目領域174は、機器111が初期のグラジエント流れおよび組成まで傾斜することができるまでの、始動条件からの代替のより低い流れプロファイル172を示している。
【0078】
部分S1a中に、機器111はまた有利には、試料を注入バルブ119のループ内に装填することが好ましい。試料は、注入バルブ19を負荷に設定し、圧力源51を使用することによって装填される。さらに、機器111は次の運転のための設定パラメータをダウンロードする。これらの設定パラメータが、制御手段125に提供される。
【0079】
ステップS1の残りの部分S1bの間、分析流れに到達し、したがって流れプロファイルは2つの代替方法の間で一貫している。さらに、機器111は次の運転のために現在のパラメータを記憶する。圧力および流体負荷Rのこれらの現在のパラメータは、ステップS7に関して以下に記載するように、制御手段125に提供される。
【0080】
ステップS2では、機器111は捕捉条件を可能にするように減圧斜面を開始する。制御手段125は、圧力に対して第1の斜面41a内の圧力を減らすようにリニアバルブ127に命令する。同時に、制御手段125は、好ましくはフィードフォワード補償(例えば、ハイブリッド減圧斜面141a)で、ポンプ115aをゼロ圧力に、ポンプ115bをゼロ流になるように命令する。「フィードフォワード補償」という用語は普通、以下により詳細に示すように、開ループ補償を意味する。ステップS2は、約30秒間続くことが好ましい。
【0081】
ステップS3では、機器111は低い圧力および流れ条件143aである。この低い圧力143aは大気圧であってもよいが、図示するように、低い圧力143aはまた、試料インジェクタバルブ119内の圧力に対応するように大気より十分上であってもよい。この斜面141aを達成するために、リニアバルブ127は廃棄するように通気し、制御手段125はゼロ流に設定された両方のポンプ115a、115bを動作させる。実際、圧縮流体中に蓄積されたエネルギーは、逆流およびスロッシングなしで、または少なくとも最小限に抑えて解放される。ポンプ115a、115bは同期される。ステップS3は約5分続くことが好ましい。
【0082】
ステップS4では、機器111は、捕捉位置に捕捉バルブ121を案内することによって捕捉プロセスに対して準備する、すなわち、捕捉バルブ121は流れを廃棄するように案内する。両方のポンプ115a、115bは、それぞれ斜面145a、145bに示すように、比較的低い圧力および高い流れの所望の捕捉条件に対して傾斜する。斜面145a、145bを達成するため、制御手段125は導管内の圧力を作動圧力147aおよび流れ147bまで大きくするように、リニアバルブ127に命令する。
【0083】
各ポンプ115a、115bによって発生した流れによって、T字部123から出る混合物を制御することができる。制御手段125はまた、試料をループから捕捉カラム165まで移動させるために、試料の注入を開始するように注入バルブ119を準備する。ステップS4は、約30秒続くことが好ましい。
【0084】
ステップS5では、機器111は混合物の所望の組成で、捕捉圧力147aおよび捕捉流れ147bで平衡に到達する。機器111は、試料の注入を開始する前に完全平衡を可能にするように、約1分間遅延することが好ましい。平衡に到達する際に、注入バルブ119を注入位置に設定することによって、試料をループから捕捉カラム165まで移動させる。比較的高いほうの流れ147bにより、試料を移動させる時間は早く、約数分間であってもよい。ユーザは、試料が効果的に捕捉カラム165に移動されることを保証するように、捕捉期間を選択する。一実施形態では、ステップS5は約5分間続く。
【0085】
ステップS6では、捕捉動作が完了した後に、ハイブリッド減圧が起こる。溶出運転中より少ないが、機器111内に蓄積されたかなりのエネルギーが、導管内の混合物の完全性を損なうことなく効率的および効果的に分散される必要がある。ハイブリッド減圧は、ポンプ115bの流れを好ましくはフィードフォワードでゼロに設定しながら、ポンプ115aの圧力をゼロに設定することを含んでいる。その結果、圧力は斜面149aに示すようにほぼ大気圧まで減少し、流れは斜面149bに示すようにゼロまで移動する。
【0086】
また、これらの斜面149a、149bを達成するために、制御手段125はリニアバルブ127を大気まで次第に通気するように命令する。注入バルブ119は、負荷位置に設定されている、すなわち、試料を保持するためのループは、分散およびその後の再圧縮が必要であるオーバーヘッドの量を少なくするように流体経路から取り除かれる。捕捉バルブ121は、廃棄するように閉鎖し、流れを分析カラム2657に案内する。ステップS6の最後で最小流れおよび圧力条件に到達する際に、機器111は中の流体の完全性を維持しながら、流体流などを再び案内するように設定を調節することができる。ステップS6は、約30秒続くことが好ましい。
【0087】
ステップS7では、機器111は、流体流を作動圧力まで圧縮し戻すのに必要な比較的大量の蓄積エネルギーにより、望ましくない長い再圧縮時間を招くことなく、溶出運転を達成するようにハイブリッド再圧縮を行う。ハイブリッド再圧縮の開始の前に、制御手段125はステップS1bで記憶された圧力および流体負荷パラメータを取得する。
【0088】
圧力および流れが前に使用したのと同じ場合、少なくとも最初は、機器111は前の値に戻ろうとする。圧力および流れが異なる場合、機器111は記憶した流体抵抗Rの値に基づき新しい設定を推定する。例えば、ステップS1bのパラメータが0.350ミクロリットル/minの設定流Qsで9,000PSIのシステム圧力Psである場合、約25,700psi/μL/minの流体抵抗Rs=Ps/Qsが算出され、メモリ内に記憶される。機器11は、新しい設定を測定するのに以下の式を使用する:
Pnew=Qnew*Rs
【0089】
新しい設定を得るために、制御手段125は、導管内の圧力を斜面161aに示すような作動圧力に、また斜面161bに示すような作動流れまで増加させるようにリニアバルブ127に命令する。同時に、制御手段125は閉ループフィードバック制御でポンプ115a、115bを運転させる。ポンプ115a、115bを高い圧力に設定し、短い間隔の間に圧力を満足させるように流れを増加することを可能にすることによって、設定流れおよび圧力パラメータは混合物の完全性を損なうことなく極めて迅速に達成される。一実施形態では、ステップS7は約30秒、または好ましくはそれより短く続く。
【0090】
斜面141a、141b、145a、145b、149a、149b、161aおよび161bは直線であるように示されているが、このような斜面は、時間の経過に従った圧力の変化を示す傾斜が管理される限りは非直線であってもよい。好ましい傾斜は、約10,000ポンド毎平方インチ(psi)毎秒未満である。傾斜はより好ましくは10から1,000psi毎秒、より好ましくは、100から500psi毎秒の範囲である。
【0091】
ステップS8では、機器111が流れおよび圧力に対する所望の設定に到達すると、流れは平らな領域163bに示すように、溶出運転中に定常状態になる。これに対して、圧力は異なる領域163aによって示すように変動する可能性がある。ステップS8の間、試料は分析のために分析カラム167まで運ばれる。
【0092】
フィードフォワード実施形態
次に図4Aから図10を参照すると、フィードフォワードを使用する別のHPLC機器211が、様々な図で言及され示されている。関連技術業界の当業者に分かるように、機器211は上に記載した機器111と同様の原理を利用している。したがって、「1」という数字の代わりに「2」という数字を前に置いた同様の参照数字が、可能な場合は同様の要素を示すために使用されている。機器111と比べて機器211の基本的な違いは、リニアバルブ127がないことである。
【0093】
図4Aおよび図4Bを参照すると、対象技術により開ループフィードフォワード補償を使用する別の正流ナノスケールHPLC機器211が示されている。機器211は、グループ化され、集合的にバイナリグラジエントポンプ220と呼ばれる複数の部品を備えたいくらか略図的な形で示されている。バイナリグラジエントポンプ220は、分析スケールクロマトグラフィで使用するために設計され、制御手段225によって行われる閉ループフィードバック制御と合わせて使用される、インライン流量変換器233A、233Bを組み込むことによってナノ流LC応用例に対する正確なグラジエントを送液するように変更される。一実施形態では、流量変換器233A、233Bは風速計式の流量変換器である。
【0094】
ポンプ215Aは、2つの移動相溶媒(例えば、水性)の一方をリザーバ供給部235Aから混合T字部223まで調達する独立高圧ポンプを示す。ポンプ235Aは、円滑な流れ送液のための2つの往復動ポンプからなっていてもよい。ポンプ235Aの出口での溶媒流れは、インライン圧力変換器231Aおよびインラインナノ流変換器233Aを通して案内される。圧力変換器231Aは、機器作動圧力の測定値を提供し、流量変換器233Aは混合T字部223内への溶媒Aの流体流の直接ナノ流測定値を提供する。閉ループ制御により、制御手段225は、ポンプ215Aの高圧シールおよび逆止弁により、流量変換器233Aから上流側に大きな寄生流れ漏洩のある状態で正確な流れ送液を維持することが可能である。同様に、ポンプ215Bは、相補的な移動相溶媒(例えば、有機)をリザーバ供給部235Bから混合T字部223まで調達する対応する圧力変換器231Bおよび流量変換器233Bを有する同様な独立高圧ポンプを示す。
【0095】
制御手段225は、混合T字部223内への各ポンプ215A、215Bの送液流を調節することによって、機器211に対する所望のユーザ設定バルク流、および2つの溶媒の組成混合比を確立する。各ポンプの溶媒流内に圧力および流量変換器231A、231B、233A、233B両方を有することによって、機器211は2つの基本的な制御動作モードで優れた適応性を提供する。
【0096】
導管240A、240Bは、2つのポンプ215Aと215Bの間で受動流体分離を行って、混合T字部223にわたって2つの流れ制御ループの固有の相互作用を安定化させるように、例えば短い長さの毛細配管などの直列のリストリクタである。リストリクタまたは導管240A、240Bは、変換器233A、233BとT字部223の間の容量を最小限に抑えるように、流量変換器233A、233Bの下流側に意図的に配置されている。
【0097】
バイナリグラジエントポンプ220からの溶媒流は、構成によって、1つまたは複数の分離カラム265、267に案内される、流体流内に試料リザーバから1つまたは複数の試料アナライトを案内する試料インジェクタバルブ219まで導管(例えば、短い毛細管)を介して運ばれる。分析カラム267からの分離したアナライトは、質量分析計、UV検出器、および/またはその他などの検出器269に案内される。
【0098】
図4Bに示すように、機器211は、捕捉カラム265、捕捉バルブ221、および分析カラム267を備えた、フォワードフラッシュモードで動作する、単純捕捉方式を特徴とする。バイナリグラジエントポンプ220は、以下に記載するように、試料装填/捕捉およびグラジエント送液の動作の両方を行う。図4Bが「フォワードフラッシュ」方式を示しているが、対象技術は、捕捉方式の業界の当業者に知られているように、「リバースフラッシュ」などの他の捕捉方法に適用可能である。示された捕捉動作の間、バイナリグラジエントポンプ220は、捕捉バルブ221が廃棄するように開かれた状態で比較的高い流量(例えば、5から15μL/min)で固定溶媒組成(例えば、極めて高い%A(水性)および、極めて低い%B(有機))を与える。分析カラム267の極めて高い流体抑制の結果、溶媒流は廃棄するように案内される。試料アナライトは捕捉カラム265の上に装填され、分析カラム267に望ましくないまたは有害である溶出成分(例えば、緩衝液、塩など)が流されて廃棄される。捕捉が終了すると、バイナリグラジエントポンプ220は捕捉流を止め、分析分離のために機器211を再構成する。捕捉バルブ221が閉じ、それによって流体流を分析カラム267に案内する。バイナリグラジエントポンプ220はその後、予めプログラミングされたナノ流量および時間プログラミングされた溶媒組成プロファイルでのグラジエント運転を開始する。図4Aに示すように、「設定流」、溶媒Aの割合および溶媒Bの割合が、ユーザによって制御手段225内に入力される。
【0099】
別の実施形態では、機器211は捕捉カラム265なしで直接注入モードで動作する。そのモードでは、短い毛細管(図示せず)は捕捉カラム265に換わり、捕捉バルブ221は閉じられたままであり、分析カラム267に流体流を案内する。試料アナライトの注入は、グラジエント運転の開始中に起こる。
【0100】
次に図5を参照すると、より詳細な制御手段225のいくらか略図的な図は、流れ制御方式を例示するために示されている。上に記したように、従来技術のシステムは、5,000psiより大きいような極めて高いシステム圧力での動作中に、システムへの流れが開始または停止した場合は、捕捉または直接注入の動作間の溶媒組成制御の損失の問題があった。制御手段225は、それぞれ各溶媒ポンプ235A、235B用の2つの流れコントローラ250A、250Bにより、機器211へのユーザ設定バルク流(設定流れ)およびユーザ設定組成溶媒比(%Aおよび%B)を確立する。設定流れ、溶媒Aの割合、および溶媒Bの割合は、合計接合部254A、254Bに沿ってそれぞれ各経路に入力される。
【0101】
各流れコントローラ250A、250Bは、PIDフィードバックコントローラとして実施され、基本的にサーボループとして挙動して、機器の流れ変化または溶媒組成の変化のいずれかに反応し、その変化のいずれかは新しい流れ設定点として運ばれる。流れコントローラ250A、250Bは、現在の流れ設定点または基準入力(Qra、Qrb)を測定した流れ(Qa、Qb)と比較して、T字部223に入力し、ステッパモータ制御ピストンポンプの場合、基準流れ(Qr)が満たされるように必要なポンプ容量流量(Qpa、Qpb)を機器211内に推進させる、適当なモータ速度信号を作り出す。同様に、他の汲み上げ方式では、適当な信号Qpa、QpbがQrを満たすように発生される。
【0102】
設定流れ変化は、傾斜手段252A、252Bによって示される、直線傾斜関数により流れコントローラ250A、250Bに運ばれる。各ポンプ215A、215Bでは、傾斜手段252A、252Bは、2つの流れコントローラ250Aと250Bの間に優れたサーボ追跡を保証する、傾斜間隔Trの時間に対して直線関数として増加的に、それぞれの流れコントローラ250A、250Bの基準設定点(Qr)まで新しい流れ設定点を通過させる。普通、Trに対する適当な値は、流量変換器233A、233Bの時定数の約5倍である。好ましい機器211では、流量変換器233A、233Bの時定数は約5秒であり、したがって30秒の傾斜時間間隔Trが好ましい。傾斜手段252A、252Bは、それぞれの流れコントローラの設定点の前の履歴を維持し、各新しいユーザ設定値では、制御手段225は、方向、合計変化値デルタ流(新しい設定流れ−現在の設定流れに等しい)、および斜面速度Rp(デルタ流/Trと等しい)を算出して、流れコントローラ250A、250Bの基準入力(Qr)に増分更新を管理する。
【0103】
図5から分かるように、各傾斜手段252、流れコントローラ250、変換器231、233およびポンプ215は、流れ制御サーボループを形成する。組成の比較的小さな変化(すなわち、2つの流れ制御サーボループ間の相補的な流れ変化)、または機器211に対するバルク流変化(すなわち、流量変換器の帯域幅内での変化)では、2つの流れ制御サーボループは、HPLCクロマトグラフィを行うのに十分な優れた組成制御、したがって流れ追跡を維持することが可能である。これは、プログラミングされたグラジエント運転中にこのような場合が当てはまる。
【0104】
しかし、大きな背圧変化に伴なって極めて大きな流れの変化を行う場合、2つの流れコントローラサーボループの追跡能力が壊れ、組成制御が失われて、機器211の流体流の組成誤差、およびクロマトグラフィの損失につながる。例えば、機器211内の流れが極めて抑止的な毛細管カラムで停止または開始されると、組成誤差が生じる可能性がある。この問題は、捕捉段階(例えば、高い流れおよび穏やかな圧力)の終わりから、グラジエント送液が始まる開始分析流れ条件(例えば、ナノ流および極めて高い圧力)へ機器211のバルク流を移行する場合、捕捉中に特に問題である。
【0105】
傾斜手段252A、252Bのみが、5,000psiの作動圧力などのより低い作動圧力でかなり効果的に流れコントローラに対する大きな設定点変化を制限することができる。しかし、10,000psiなどのより高い作動圧力が適切に補償されない場合、はるかに長い毛細管カラムでの動作を可能にすることにより、流れコントローラの深刻な誤追跡により、少なくとも組成制御の部分的な損失が生じる。
【0106】
誤追跡の原因は、機器カラム265、267への流れ送液のナノスケールに対する、ポンプ215A、215Bの極めて大きなシリンダ容量によるものである。これらのLC応用例で使用される移動相溶媒は、上記作動圧力で比較的圧縮可能であるので、定常流れを混合T字部223内で達成する前に、これらの流体の捕捉容量はかなりのエネルギー蓄積が必要である。このエネルギー蓄積は、機器流体の圧縮量変化として表れ、溶媒圧縮性および捕捉容量に正比例し、作動圧力の二乗に比例する。蓄積されたエネルギーは、各ポンプ215によって追加の「充填(charging)」流れとして供給され、圧力は変化し、混合T字部223内で制御されている流れよりはるかに大きい。溶媒A、Bは普通、かなり異なる流体圧縮性を有するので、2つのそれぞれのポンプ215Aと215Bの間の効果的な充填流れは、混合T字部223にわたる容量変化と同様に、その圧縮性の比だけ異なる。したがって、流れコントローラ250A、250Bが混合T字部223での充填流れおよび容量のかなりの不均衡を管理することができないことにより、組成制御の損失が作り出される。
【0107】
流体モデル
組成制御の損失の力学、および流れコントローラ250A、250Bの制限を機器がどのように補償するかを示すために、流体の単純分析モデルを示す。流体の圧縮性は、圧力変化の反応としての流体の相対容量変化として定義され、以下のように数学的に示される。
【数1】
式中、Vはシステムの容量であり、偏導関数は圧力の変化に対する容量の変化を示す。熱力学の用語では、圧縮性は偏微分がとられる条件またはプロセスによって定義されている(例えば、断熱/一定エントロピーまたは等温/一定温度)。
【0108】
圧力の変化に対する容量の微分変化はまた、流体容量として示され、これはエネルギーを蓄積するための流体の容量である。したがって、流体容量は以下の通りである:
C=β・Vo
式中、βは流体圧縮性であり、Voはシステムの捕捉容量である。電気回路からの単純オーム関係を使用して、流体抵抗は以下のように示される:
R=ΔP/Q
式中、ΔPは抑制要素にわたる圧力低下であり、Qは要素を通る流量である。抵抗Rは基本的に、流体要素の長さおよびそこを通って流れる流体の粘度に比例している。
【0109】
電気回路と同様の容量および抵抗の基本一括パラメータ要素を使用して、機器211の等価流体回路が図6に示されている。同様に、電流「I」はμL/minの単位での容量流れ「Q」を示している。電圧は、psiで圧力を示し、容量「C」は流体の流体エネルギー貯蔵を示し、μL/psiの単位で示されている。抵抗「R」は、psi/μL/minの単位で流れに対する流体制限を示している。
【0110】
図6の流体モデルを図5の流れ制御サーボループに関連させて、IpaおよびIpbは、それぞれ機器211内に両方のポンプAおよびBによって運ばれる容量流を示す2つの従属電流または流源である。流れIpa、Ipbは、ポンプモータアクチュエータの命令速度に正比例する。PTaおよびPTbは、それぞれ2つのインライン圧力変換器231A、231Bを示している。圧力変換器231A、231Bは、ポンプ215A、215Bでそれぞれノード圧力PaおよびPbを測定する。同様に、FTaおよびFTbはそれぞれ、2つのインライン流量変換器233A、233Bを示している。流量変換器233A、233Bは、混合T字部223へのそれぞれ2つの制御流れIaおよびIbを測定する。
【0111】
混合T字部223での2つの流れIaおよびIbの合計は、混合T字部223からの流れIsにつながる。機器211の有効負荷は、基本的に流体回路の終わりでのカラム265、267の流体抵抗である、抵抗Rsによって示され、Csは混合T字部223の下流側での機器の一括流体容量を示している。容量Csは基本的に、インジェクタバルブ219の試料ループの量、および捕捉カラム265の量からなる。容量Csは、ポンプ容量Ca、Cbよりはるかに小さい。
【0112】
RaおよびRbは、それぞれ2つの毛細管リストリクタ240A、240Bの流体抵抗を示している。必要ではないが、抵抗Ra、Rbは、それぞれの長さを溶媒A、Bの粘度と比例させることによってほぼ等しくなる。抵抗Ra、Rbは、毛細管カラム265、267の組み合わせた抵抗Rsに対して極めて小さい。例えば、抵抗Ra、Rbは約40psi/μL/minであり、75μm内径×150mm×1.7μmの粒子毛細管カラムの抵抗Rsは水に対して約25,000psi/μL/minである。
【0113】
Psは、カラム265、267内へのシステム流Is、または機器抵抗Rsから得られるシステム背圧である。毛細管リストリクタはRsよりはるかに小さいので、測定したポンプ圧力Pa、Pbはそれぞれ、機器背圧Psのかなりの割合である。CaおよびCbは、それぞれ各ポンプ215A、215Bの集合流体容量を示し、その入口バルブ(または、逆止バルブ、図示せず)と出口ポートの間の変位ストローク量と内部デッドボリュームを含む最終送液ポンプシリンダ、圧力変換器、およびそれぞれ流量変換器231、233を含まないがそこまでの連結導管全ての捕捉容量を含んでいる。一実施形態では、送液ポンプシリンダおよび流量変換器までの相互連結導管の捕捉容量は、約160μLである。水性ポンプ215Aでは、水に対する流体圧縮定数βは3.12e−6/psiである。したがって、Aポンプの流体容量はほぼ以下の通りである:
Ca=3.12e−6/psi*160μL=0.0005μL/psi
有機ポンプ215Bでは、アセトニトリル(ACN)に対する流体圧縮定数βは7.34e−6/psiであり、水の2.35倍の圧縮性がある。したがって、Bポンプの流体容量はほぼ以下の通りである:
Cb=7.34e−6/psi*160μL=0.00118μL/psi
【0114】
IcaおよびIcbは、ノード圧力Pa、Pbが変わる場合の、それぞれのポンプ流体容量Ca、Cb内へのまたはそこからの圧縮性「充填」または「放出(discharging)」流を示している。電気的等価を使用して、圧縮性流れは以下のように示される:
【数2】
フィードバック制御方式の制限を考慮するために、30秒の傾斜間隔Trにわたって流れがゼロからグラジエントの初期条件まで傾斜する以下のシナリオであると考える。これは、以下の捕捉または直接注入のいずれかの場合である。傾斜間隔中、組成は極めて高い水性または有機混合比で(例えば、97%A、3%B)一定に保持される。上記カラムでの350nL/minの目標流量では、約9,000psiの定常システム圧力Psが達成される。傾斜方法で、機器圧力Psはまたゼロから9,000psiまで直線的に傾斜すべきである。システムを9,000psiに圧縮するのに必要であるAポンプに対する流体容量の変化は、以下の通りである:
ΔVa=Ca・ΔP=0.0005μL/psi*9,000psi=4.5μL
B溶媒の圧縮性はA溶媒の2.35倍であるので、Bポンプの対応する容量変化は約10.6μLである。
【0115】
例えば、30秒の傾斜間隔にわたりシステム圧力を9,000psiまで傾斜させるために、ポンプ215Aは以下の持続平均「充填」流れIcaを供給しなければならない:
【数3】
この間、関連する制御流れIaをゼロから0.97*350nL/minすなわち約340nL/minの目標値まで傾斜させる。同様に、ポンプ215Bは以下の持続平均「充填」流れIcbを供給しなければならない:
【数4】
この間、関連する制御流れIbをゼロから0.03*350nL/min=11nL/minの目標値まで傾斜させる。
【0116】
T字部での出口の組成制御を維持する場合、ポンプヘッドでの圧縮または充填流れは、組成比とは関係なく、2つの溶媒圧縮因数の正確な比率で維持しなければならない。この要件が満たされない場合、制御入口流れIa、Ibの適切な混合比を維持するのに必要な混合T字部223の入口ポート(図示せず)にわたるノード圧力Pa、Pbの繊細な微分追跡は、流れコントローラ250A、250Bによっては維持されない。微分圧力混乱が十分深刻である場合、ノード圧力Pa、Pbの一方が機器圧力Psの下まで低下して、混合T字部223のその行程または側部に対して流れ逆転を引き起こす。この状況では、より高いノード圧力PaまたはPbでの支配ポンプが、混合T字部223の出口(図示せず)で溶媒混合物を飽和させ、場合によっては、他のポンプの流量変換器233Aまたは233Bを汚染する。したがって、流体回路の構造および容量スケールにより、混合T字部にわたる圧力差は、T字部内への2つの制御流れと比べて、充填流れにはるかに強く依存している。これにより、フィードバックコントローラに対する極めて悪い状態の問題が起こり、有機ポンプに対してほぼ2,000から1である、はるかに大きい制御されていない充填流れと比べて、混合T字部内へのむしろ小さな入口流れ中の誤差に対して反応することしかできない。
【0117】
例えば、傾斜動作の始めに、各ポンプヘッドの容量が充填を開始するまで、混合T字部223内への測定可能な流れがほとんどない。流れコントローラの比例動作は、100μL/minの高い限界まで各ポンプモータ(図示せず)の命令信号速度を仕切り、これは水性ポンプ215Aの平均充填流れの約10倍であるが、有機ポンプ215Bの平均充填流れのかろうじて5倍である。したがって、両方のポンプ215A、215Bが開ループに留まっている持続時間は異なり、水性ポンプ215Aで約2.7秒、有機ポンプ215Bで約6.3秒である。明らかに、両方のポンプ215A、215Bが開ループであるが、同じ流量で流れている、少なくとも3秒の重複間隔がある。したがって、フィードバックコントローラは、両方のポンプヘッドの放出状態によって生じる極めて高い充填流れの知識または直接測定がなく、組成制御を維持することが不可能である。この問題は、システム流れが普通の終端グラジエント状態からゼロに傾斜される場合に相補的な挙動を有する。この場合、圧縮容量が拡大する場合に、各ポンプ215A、215Bの蓄積エネルギーがシステム211内に放出される。有機ポンプ215Bはより多くの容量またはエネルギー蓄積を有するので、水性ポンプ215Bの流体は有機ポンプ215Aの流体より多く広がって、有機ポンプ215Bは出口流内に望ましくなく「ゲップ」をし、他の変換器233A内に逆流させる。これは、システム211が、次の運転のために直接注入または捕捉動作のいずれかを開始するように前の運転から移行する場合である。
【0118】
図7を参照すると、対象技術によるフィードフォワード補償の使用を特に例示するように、図4Aおよび図4Bの機器311のいくらかより詳細なバージョンが示されている。当業者が分かるように、機器311は上に記載した機器と同様の原理を利用している。したがって、可能な限り同様の要素を示すために、「3」という数字を前に置いた同様の参照番号が使用されている。機器111、211と比べて、機器311の基本的な追加は、図6の流体モデルで示すように、信号加算および乗算接合部および等価の電流値を含めることである。
【0119】
全体的に、修正フィードフォワード制御方式は、バルクエネルギー蓄積の分離、すなわち流れ傾斜動作中の流れ(および、組成)のフィードバック制御からのポンプヘッドのバルク流体圧縮性に基づいている。フィードフォワード方式は、閉ループ流れコントローラ250A、250Bとは別に、バルク捕捉ヘッド容量を圧縮および減圧するのに必要な大きな背圧変化を管理する。フィードフォワード方式は、ポンププランジャ(図示せず)のタンデム移動に制御法則を適用し、それによってポンプヘッド(図示せず)の圧縮エネルギーの蓄積または解放が、混合T字部23への入口ポートで適切な組成流れQaおよびQbを保持するように制御されている。フィードフォワード制御動作は、混合T字部323にわたる液体のスロッシングが組成の許容誤差範囲内にあるように、2つのノード圧力PaおよびPbを効果的に均衡させる。
【0120】
フィードバックコントローラの観点から、フィードフォワード方式は、流れ斜面中の流れコントローラに対するバルク容量負荷または障害を取り除いて、効果的にポンプヘッドの捕捉容量をほとんど見えなくする。制御流れに対する基本的な負荷障害は、デルタP、または推進ポンプヘッドからのノード圧力の変化である。したがって、各流れコントローラに示される障害流れQdistはデルタPに比例している。このデルタPは、大きなバルク流れ変化により大きな圧力変化が起こる場合に、捕捉ヘッド容量内におよびそこから流れる極めて大きな圧縮または減圧流れIcを生じさせる。フィードフォワードループは、混合T字部323内への制御流れとは別に、各ポンプ315A、315Bによって供給または吸収しなければならない必要な充填または放出流れIcを効果的に推定し、それによってフィードバックコントローラは、システム圧力がシステム311へのバルク流れの変化のみに応じて傾斜する間に、正確な組成混合比を維持することができる。再び図6を参照すると、普通、フィードフォワード制御法則は、単に以下のように圧力の変化に応じたヘッド容量の充填または放出流れである:
Qfeedforward=Ic=C dp/dt
また、圧力変化は推定または測定障害関数である。
【0121】
次に図7を参照すると、傾斜手段352は所望のバルク流れ傾斜関数を制御方法に与える。Aポンプ315Aでは、制御手段による前の運転から記憶されたシステム抵抗Rsの測定を使用して、予想システム圧力斜面Paの推定値が乗算器254A1で導き出される。フィードフォワード方式は、Paの誘導動作255をとることによって、圧力障害信号を算出する。フィードフォワード制御法則Qcaは、Paの導関数を259でポンプAの測定容量Caで乗算することによって算出される。フィードフォワード修正は、加算接合部263で流れフォードバックコントローラ350Aから命令信号内に加算される。同様に、Bポンプ315Bは動作254A4、257、261および265を介してそのフィードフォワード修正信号を導き出す。実際の応用例では、フィードフォワード計算は、図7に示す制御方式で、圧力信号の実際の導関数をとる必要はない。代わりに、傾斜手段352(段落0123参照)によって算出される斜面速度Rpは、圧力斜面信号の導関数であり、フィードフォワード信号Qcaを作り出すように容量Caによって単に乗算されるだけである。
【0122】
別の実施形態では、障害信号Paのフィードフォワード推定値は、圧力変換器331Aによって与えられる実際の測定値に置き換えることができる。しかし、雑音が常に信号に存在しており、信号の導関数をとるのに適当なフィルタリング手段を提供しなければならない。
【0123】
次に再び図7を参照すると、対象技術によるフィードフォワード補償の応用例を特に示すように、図4Aおよび図4Bの機器のいくらかより詳細なバージョンが示されている。
【0124】
フィードフォワードの別の改良
図8は、対象技術による改良フィードフォワード信号の特定の成分を特に例示するために示された、さらに詳細な別のバージョンのLC機器である。図9は、図8により負荷にエネルギーまたは電荷Csを与えるように、システムまたは充填流れIsを有するLC機器と等価の別の電気回路である。簡単にするために、図8は混合T字部423内へのポンプ415Aの流体流または行程のみを示しており、ここに示す流体改良の全ての説明はまた、ポンプ415Bの行程に混合T字部423にわたって対称的に当てはまる。
【0125】
フィードフォワード制御の第1の改良は、送液ストローク中のポンプ415Aの変化容量および得られる容量Caを考慮する必要がある。ストロークがポンプ415Aの下死点から上死点まで横切ると、有効ポンプ容量Caは、ストロークおよび固定捕捉容量の合計に対するストローク容量の比に比例する正味変化と共に変わる。ストローク容量がかなりある可能性があるので、Caは図9に示すように時間変化パラメータであり、フィードフォワード制御中に修正することができる。プランジャ移動位置を監視し、溶媒圧縮因数βによって乗算する前に、様々な捕捉容量Voに適当な変更を行うことによって、適切な修正が行われる。プランジャ位置は、直接命令モータ位置を読み取ることによって、または提供されるモータシャフトエンコーダ、リニア位置表示器などを測定することによってのいずれかで分かる。Caの時間変化値に対する修正は、乗算器459の前のCaに対するストローク容量修正として図8に示されている。
【0126】
フィードフォワード制御方式の第2の改良は、インライン流量変換器の捕捉流体容量、および関連する望ましくないエネルギー蓄積効果を考慮する必要がある。一実施形態では、各流量変換器433A、433Bはちょうど2μLの捕捉容量を有する円筒形管(図示せず)から構成されている。測定要素は、管の長さに沿って対称的に配置されており、中間点の上流側および下流側で均等に捕捉容量を大まかに分割し、これは流れ測定が行われる仮想ノードである。これらの捕捉容量要素によって生じるエネルギー蓄積効果は、図8の2つの分路容量CpreFTおよびCpostFTとして示すことができ、変換器433Aの両側にある。
【0127】
図9は、流量変換器の両側にある、上流側および下流側容量CpreFTおよびCpostFTを組み込む。図9では、FTaは、物理装置の両側の容量の間で中心に置かれるほとんど小さい点で測定流れ信号を作り出す理想的な仮想変換器を示す。変換器容量CpreFTおよびCpostは、ノードPaでのポンプ415A圧力が変化する場合に、対応する分路電流IcprおよびIcpoを生じる。フィードフォワード制御方法に行われる改良は、図9に示すようにこれらの追加の分路電流が、乗算器471、473に入り、加算接合部475、477内に通過することとなる。これらのフィードフォワード流れは、乗算器454A1の出力で命令圧力斜面を満たすのに必要な変換器充填電流を補償する。実用的な目的で、上流側変換器容量CpreFTは、はるかに大きいポンプシリンダ容量または容量Caに含まれ、それによって測定流れ上の分路電流Icprの効果は無視することができる。したがって、変換器を通る流れは実質的に、流量変換器433Aの下流側容量により、混合T字部423内へのポンプ415Aの流れ、および充填流れIcpoからなる。実際の応用例では、充填流れIcpoを生じる容量CpostFTは、毛細管配管を使用することによって最小限に抑えることができる、直列リストリクタ440Aのあらゆる捕捉容量による。このモデルでは、流量変換器433Aは、ポンプ415Aの圧力Paが変化する場合に、所望の制御流れIatの測定誤差を作り出す。誤差項は、ポスト変換器充填流れIcpoである。
【0128】
第3の改良は、流れコントローラ450Aの設定点にフィードフォワード算出値Icpoを加算する、加算接合部479によって図8に示すように、フィードバックコントローラ450Aで流量変換器測定流れ誤差を修正することによって制御方法に行われる。修正が達成される方法を理解するために、流れコントローラ450Aは、(Qra’−Qa)として示される、内部誤差検出器信号、設定点マイナス測定値に対応する。設定点項Qra’は、実際の駆動設定点Qra、および流れ測定値Icpoの算出誤差項である。しかし、流量変換器測定は、IatおよびIcpoの合計に対応する。したがって、流れ誤差項は、流れコントローラの誤差信号にわたってキャンセルされて、所望の誤差信号(Qra−Qat)を作り出す。
【0129】
図10を参照すると、対象技術によるフィードフォワード信号を使用したハイブリッド方法を特に例示するために、さらに別の詳細なバージョンのLC機器が示されている。図10に示す制御方法はまた、ハイブリッド圧力および流れ制御方法またはハイブリッド方法と呼ぶこともできる。ハイブリッド方法は、混合T字部523の下流側の圧縮要素に対処する。一実施形態では、下流側要素はユーザ構成可能構成部品を備えており、できれば実用的でない制御方法によって特徴付ける。このような構成部品は、様々な容量サイズで与えられる、インジェクタ試料ループおよび捕捉カラムを備えている。これらの構成部品は、出口T字部523に取り付けられた一括システム容量を示しており、分析カラム(図示せず)の極めて制限的なシステム抵抗Rsと並列にある、Csとして図6および図8の流体モデルに示されている。上で記したように、フィードフォワード補償を使用することにより、フィードバック専用制御方式を苦しめる混合T字部523までの組成制御問題を解決することができる。しかし、試料ループおよび/または捕捉カラムなどの大容量構成部品が混合T字部523の下流側に加えられると、下流側容量Csは、流れ斜面が進行中である間に、混合比によって、流れコントローラの一方または両方に対する極めて大きな充填流れを示している。Csの大きさにより、システム充填流れは、システムへの傾斜バルク流よりはるかに大きく、流量変換器533A、533Bの流れ範囲能力を容易に超えることができる。Csの余分な流れは、流量変換器533A、533Bを開ループにし、その結果、組成制御の損失につながる。
【0130】
ハイブリッド方式で、混合T字部523内への流れ行程の1つに対する制御方式は、流れ制御から圧力制御、例えばポンプ515Aの行程まで変えられる。ポンプ515Bを有する他の行程は、フィードフォワード修正および前に記載した全ての改良で、流れ制御モードで動作する。実際、流れ制御により使用する選択行程は、普通は有機ポンプ515Bである、バルク流れへの最も小さな貢献を処理するものである。これは、グラジエントまたは分析運転を開始および停止させる場合の、流れの状態である。ハイブリッド方式での流れ傾斜中に、圧縮のフィードフォワード補償での流れ制御による有機ポンプ515Bは、混合T字部523にわたる液体のスロッシングを防ぐように、基本的にゼロ流状態で所望の剛性を維持する。一方、混合T字部523内への2つのポンプ流れの相補的性質により、圧力制御による水性ポンプ515Aは、両方とも流量変換器533Aの上流側の全ての必要な充填流れ、および混合T字部523の下流側の充填流れを供給する。ハイブリッド方式の相補的圧力および流れモードは、流れ制御行程のフィードバックコントローラ550Bが開ループになるのを防ぎ、圧力制御行程はバルク流傾斜に沿うように、システムの残りを圧縮するのに必要な混合T字部523の下流側でエネルギーを供給する。制御方式に組み込まれた圧力モードでは、ポンプ515Bの流れ制御行程は、開ループになるのが防止され、システムのバルク流に対するその貢献についていくことが可能であり、したがってシステム内での正確な組成制御を維持する。別の実施形態では、ハイブリッド方式は、優れた誤差防止および修正をさらに行うように、図10のポンプ515Aの圧力コントローラ行程の出力命令信号内に図9に示すフィードフォワード修正要素459、463、471、473、475、477を組み込むことができる。
【0131】
予備成形グラジエント実施形態
図11を参照すると、対象技術による別の正流ナノスケールHPLC機器611が示されている。関連業界の当業者が分かるように、機器611は上に記載した機器と同様の原則を利用している。したがって、可能な限り同様な要素を示すのに、「6」という数字を前に置いた同様の参照数字が使用されている。上の機器と比べて機器611の基本的な違いは、予備成形されたグラジエントを維持するための貯蔵毛細管622の使用である。当業者が分かるように、本明細書に記載する対象方法およびシステムは、所望の性能を達成するために共に、別個に、およびあらゆる組合せで使用することができる。上と同様に、HPLC機器611は、2つの主な構成部品、バイナリ溶媒グラジエント送液サブシステム620および分析サブシステム604を有する。溶媒送液サブシステム620は、グラジエントを形成し、分析サブシステム604にこれを提供し、その上にクロマトグラムを生成する。溶媒送液サブシステム620は、対象技術の利点を提供するために、多くの代替分析設計に適合させることができると考えられる。大まかには、溶媒送液サブシステム620は1ステップで溶媒AおよびBの比較的低圧混合を実施して、グラジエントを形成し、第2のステップで分析サブシステム604へのグラジエントのその後の高圧送液を行う。第1の混合ステップは独立しており、第2の送液ステップと干渉しないという点において、これらのステップは直交している。溶媒送液サブシステム620は、2つのポンプ615A、615Bが利用されているという点においてバイナリである。各ポンプ615A、615Bはそれぞれ、インライン圧力変換器631A、631Bおよび流量変換器633A、633Bを通して案内される出力を作り出す。コントローラ625は、ポンプ615A、615Bの動作を管理し、変換器631A、631B、633A、633Bから信号を受ける。
【0132】
混合ノードまたはT字部623は、グラジエントを形成するように貯蔵毛細管622内に流れる、所望の溶媒混合物を形成するようにポンプ出力を組み合わせる。混合T字部623はT字形接続金具であり、貯蔵毛細管622は背圧および分散を最小限に抑えるような寸法をしていることが好ましい。貯蔵毛細管622からの下流側で、ナノT字接続金具624は2つの出口を形成する。ナノT字接続金具624の1つの出口は分析サブシステム604に連結し、もう一方の出口は放出バルブ626に連結する。放出バルブ626の動作はまた、コントローラ625によって管理され、それによって貯蔵毛細管622内にグラジエントを形成する間に、両方のポンプ615A、615Bが運転しながら、放出バルブ626が開いて残留流体を廃棄する。分析サブシステム604へのグラジエントの送液中に、ポンプ615Aのみが運転し、もう一方のポンプ615Bは「オフライン」である。機器611の構成部品の選択および配置は、溶媒送液サブシステム620の出口を混合T字部623の出口からナノT字接続金具624の出口まで移動させることが好ましい。放出バルブ626は、ピンバルブであることが好ましい。しかしピンバルブの代わりに、ボールバルブ、ゲートバルブ、グローブバルブ、バタフライバルブなどを使用することができる。
【0133】
分析サブシステム604は、溶媒送液サブシステム620の出口を試料インジェクタ619に連結させる、短い毛細管などの輸送ライン628を備えている。試料インジェクタ619は、試料リテーナ642内に蓄積された1つまたは複数のアナライト試料をグラジエントまたは流体流に案内する。アナライトが存在する場合、流体流が分析のためにカラム667に案内される。カラム667では、アナライトが隔離され、分離され、検出器669に案内される。検出器669は、特定の応用例に適切である、質量分析計、紫外線検出器などのあらゆるタイプであることが好ましい。検出器669の読取に基づき、クロマトグラムが生成される。ポンプ615Aは、2つの移動相溶媒の一方(例えば、水性溶媒)をリザーバ供給部(図示せず)から混合T字部623に案内する独立型高圧ポンプであることが好ましい。上記と同様に、水性ポンプ615Aの出口の溶媒流れは、機器作動圧力の測定を行うために、インライン圧力変換器631Aによって読み取られる。流量変換器633Aは、混合T字部623内に入る際に、水性溶媒の直接ナノ流測定を行う。これらの信号はそれぞれ、水性ポンプ615Aの閉ループ制御のためにコントローラ625まで通過される。したがって、コントローラ625は高圧シール、水性ポンプ615Aの逆止バルブ、および当業者によく知られている同様の問題による大きな寄生流漏洩があるにも関わらず、流量変換器633Aの上流側で正確な流れ送液を維持することが可能である。
【0134】
同様に、ポンプ615Bは、圧力変換器631Bおよび流量変換器633Bを供給する別の独立型高圧ポンプである。しかし一方で、ポンプ615Bは相補的移動相溶媒(例えば、有機溶媒)をリザーバ供給部(図示せず)から混合T字部623まで案内する。圧力変換器631Bおよび流量変換器633Bの信号はまた、コントローラ625に供給されるので、完全な閉ループ制御が可能である。コントローラ625は、混合T字部623内への各ポンプ615A、615Bの送液流れを調整することによって、分析サブシステム604への所望のユーザ設定バルク流れと、2つの溶媒の組成混合比を確立する。一実施形態では、流量変換器633A、633Bからの導管は、2つのポンプ615Aと615Bの間の受動流体分離を行って混合T字部623にわたる2つの流れ制御ループの固有の相互作用を安定させる毛細管リストリクタである。別の実施形態では、毛細管リストリクタが、流量変換器633A、633Bの上流側に設けられている。いずれの場合でも、または両方が使用される場合、2つのポンプ615A、615Bからのフィードバック不安定と、直交流および/または逆流汚染が避けられる。
【0135】
グラジエント形成および送液
次に図12を参照すると、グラジエントを分析サブシステム604に提供するために溶媒送液サブシステム620を操作するプロセスが、流れ図として示されている。ステップS1では、グラジエント形成の前に、コントローラ625は、放出バルブ626を開いて、貯蔵毛細管622内の古い残留流体(例えば、100%水性溶媒)を案内して廃棄することによって、溶媒送液サブシステム620を準備する。現在知られている、または後に開発されるあらゆる適切な導管、管またはマイクロ流体構造を使用して、貯蔵毛細管622の機能を行うことができると考えられる。基本的に大気に通気される貯蔵毛細管622内でのグラジエントの形成は、以下の3つの機能を達成する。1)カラム667または他の連結された消耗品と関係なく、形成背圧が貯蔵毛細管622の幾何形状によって正確に制御される。2)注入運転間のカラム667の平衡状態を狂わせるのを防ぐために、貯蔵毛細管622内の流体がパージされて廃棄される。3)形成中の流れの開始および停止による、形成されたグラジエントをひとまとめにするあらゆる先行または後行組成異常が、機器611の一次流体流から離れるように、すなわち分析サブシステム604およびその中のカラム667から離れるように案内される。ステップS2では、グラジエントは、ポンプ615A、615Bを低圧(例えば、100psi)およびより高い流量(例えば、通常のクロマトグラフィ流量の10から20倍)で動作させることによって、貯蔵毛細管622内に形成される。貯蔵毛細管622は、FIFO方式でグラジエントを受けることが好ましい。グラジエントが貯蔵毛細管622内に形成されると、分析サブシステム604への送液が後に、高圧および通常のクロマトグラフィ流量で起こる可能性がある。貯蔵毛細管622の幾何形状は、グラジエントに対する必要な貯蔵容量を達成し、背圧の形成およびグラジエント分散を最小限に抑えるような長さおよび内径の寸法をしている。グラジエント全体に加えて、貯蔵毛細管622の容量は、貯蔵毛細管22からカラム667までグラジエントを移動させるのに必要な輸送容量の追加のオーバーヘッドに対応するのに十分なだけ大きいことが好ましい。
【0136】
さらに図12を参照すると、ステップS3では、有機ポンプ615Bはグラジエントを送液する準備をするようにオフラインがとられる。したがって、有機ポンプ615Bは分析サブシステム604へのグラジエント送液に関与しない。好ましい一実施形態では、有機ポンプ615Bは、有機ポンプ615Bの閉ループ流れ制御をゼロの基準流れ設定で維持することによって、コントローラ625によりオフラインがとられる。別の実施形態では、有機ポンプ615Bは、混合T字部623の上流側でこれに隣接して隔離バルブ(図示せず)を利用することによって、オフラインがとられる。
【0137】
ステップS4では、コントローラ625は放出バルブ626を閉じて、形成されたグラジエントの流れを分析サブシステム604に案内する。その結果、閉ループ流れ制御で動作する水性ポンプ615Aは単に、ステップS5での送液のために貯蔵毛細管622からグラジエントを押し込むための、原動力として使用される。
【0138】
多数のカラムに対する流れ制御
注入運転中にカラムの特定の選択のために作動流量を変える必要がある応用例、例えば試料捕捉および2Dクロマトグラフィでは、流量が各カラムの選択の間で開始および停止される。図11の溶媒送液サブシステム620は、比較的大きなシリンダ容量のポンプ615A、615Bおよびカラムへのナノスケールの流れ送液にも関わらず、このようなLCシステム内に様々なグラジエントを提供するように十分適合されている。一実施形態では、コントローラ625は放出バルブ626が開いて廃棄する状態でポンプ615A、615Bをリセットし、定常流れを得るために溶媒送液サブシステム620を待つ。効果的であるが、この動作は流体流を作動背圧に圧縮するのに必要な蓄積エネルギーの比較的大きな容量変化により、望ましくないほど時間がかかる可能性がある。
【0139】
例えば、水性ポンプ615Aの圧縮定数(例えば、圧力変化あたりの容量変化)は、約0.5nL/psiであることが好ましい。特定の毛細管カラム(例えば、75μm内径×250mm×1.7μm粒子)に対する300nL/minの流量で約9,000psiの定常圧力に到達するのに必要な時間は、以下の計算で示すように約15分である。
ΔV=C・ΔP=0.0005uL/psi*9,000psi=4.5uL
T=ΔV/q=4.5nL/0.300uL/min=15min
【0140】
次に図13を参照すると、多数のカラムを有するLCシステム(図示せず)に対する溶媒送液サブシステムによる一連の注入運転を行う場合にゆっくりな流れ開始を避けるプロセスが示されている。別には示さないが、この溶媒送液サブシステムはちょうど図11に示すようなものであってもよい。したがって、明確にするため、図11の溶媒送液サブシステム620に対する言及を再び利用する。大まかには、溶媒送液サブシステム620は、システム圧力を前の運転から前の定常流状態に迅速に圧縮するように圧力制御による流れ送液を開始し、その後、流れ制御に移行する。
【0141】
図13のプロセスは、カラムが次の運転のために開始状態に再平衡される場合に、注入運転の終わりから始まる。図13のステップS1では、コントローラ625は、使用される次のカラムのためにユーザによって選択された流量を受け、記憶する。ステップS2では、コントローラ625は、前のカラム注入で望ましいように、圧力変換器633からのシステム圧力測定値を記憶する。ステップS3では、図2に関して上で説明したように、流れが停止し、新しいグラジエントが形成される。流れ送液を開始するために、コントローラ625は、圧力変換器633Aをフィードバックとして使用して、閉ループ圧力制御で動作するように水性ポンプ615Aを構成する。
【0142】
ステップS4では、コントローラ625は基準設定点(例えば、目標圧力)を前の運転から記憶されたシステム圧力測定値に設定する。その後、水性ポンプ615Aは基準設定点を得るために運転される。システム圧力が基準設定点に到達すると、すなわち定常圧力まで圧縮して戻されると、図13のプロセスはステップS5に進む。
【0143】
ステップS5では、コントローラ625は、流量変換器633Aをフィードバックとして使用して、水性ポンプ615Aを閉ループ流れ制御に移行し、基準設定点をステップS1で受けられたユーザ設定溶出流量に設定する。所望の溶出流量に到達すると、プロセスはステップS6に進み、ここで新しいグラジエントの送液が起こる。閉ループ流れ制御で動作する水性ポンプ615Aは単に、送液のために貯蔵毛細管622からグラジエントを押し込むための原動力として使用される。
【0144】
図11に示す設計に対する別の変更形態も、対象技術の範囲内にある。例えば、これに限らないが、貯蔵毛細管622、ナノT字接続金具624、および放出バルブ626が図11ではインジェクタ619の前に示されている。グラジエント輸送遅延を最小限に抑えるために、要素624、626はできるだけインジェクタ619の近くに配置することができる。その結果、輸送ラインまたは要素628を取り除き、貯蔵毛細管622に換えることができる。貯蔵毛細管622を試料インジェクタ619およびカラム667により近接して移動させることはまた、熱管理区画内にしばしば配置される、カラム667と貯蔵毛細管622を同一に配置する機会を示している。貯蔵毛細管622のこのような配置は都合の良いことに、貯蔵毛細管622を外部温度変化から隔離して、保持時間再現性を良くする。
【0145】
別の例では、対象技術は、貯蔵毛細管および放出バルブに加えて、マサチューセッツ州MilfordのWaters Corporation社のWATERS(登録商標)ナノAQUITY UPLC(商標)システムに簡単に適合させることができる。これらの機器では、作動圧力は10,000から15,000psi超の圧力定格にわたり、作動送液流量は約10nL/minであることが可能である。さらに、WATERS(登録商標)ナノAQUITY UPLC(商標)システムは、以下により詳細に説明するように、優れた感度に対する可変流れ/ピークパーキング特性、および上に説明したフィードフォワード補償を提供することができる。
【0146】
捕捉実施形態
対象技術はまた有利には、極めて制限的なカラムと直列に短い捕捉カラムを使用する捕捉応用例(すなわち、高い捕捉容量応用例)に適用される。このような状況では、流れの停止は、圧力が最終的にゼロ近くに下がる長い時間間隔を特徴としている。長い時間間隔は、高い容量の捕捉カラム(すなわち、圧縮の蓄積エネルギー)によって作り出された捕捉システムの極めて大きい有効時定数、および分析カラムの大きな抑制(すなわち、限られた流れ)によるものである。有効時定数は、数十分であってもよい。捕捉応用例におけるこのような長い時定数を回避するために、対象の溶媒送液サブシステムの原則を利用することができる。さらに、グラジエントを効率的に形成することによって、バルブなどの普通の捕捉構成部品の使用およびその磨耗は、寿命を延ばすように最小限に抑えることができる。
【0147】
次に図14を参照すると、溶媒送液システム720が、捕捉応用例システム711内の使用で示されている。当業者が分かるように、システム711は、図11に示すのと同様の溶媒送液サブシステム720を利用する。したがって、可能な限り同様な要素を示すのに、「7」という数字を前に置いた同様の参照数字が使用されている。システム711では、試料装填、試料捕捉およびグラジエント形成の動作が一連になっていることが好ましい。
【0148】
システム711は、加熱捕捉モジュール704に連結された試料マネージャ720を備えている。試料マネージャ720は、溶媒送液サブシステム720および加熱捕捉モジュール750に連結された注入または装填バルブ742を備えている。注射器744および針746はまた、注入バルブ742に連結されている。加熱捕捉モジュール750は、分析カラム767と直列である捕捉カラム752を有し、捕捉カラム752は注入バルブ742に連結されている。捕捉カラム752と分析カラム767の間にあるT字接続金具756は、捕捉バルブ758に連結している。
【0149】
明確にするために、圧力変換器は図14には示されていないことに留意されたい。圧力変換器は、ポンプ715A、715Bの一体構成部品として存在している。しかし、小さなリストリクタ770が図では、流量変換器733Aのすぐ上流側に連結され、大きなリストリクタ771が図では、流量変換器733Bのすぐ上流側に連結されており、このようなリストリクタは存在していることが好ましいが、本明細書の他の実施形態では省略されている。リストリクタ770、771は、混合T字部723への相互連結により、ポンプ715Aと715Bの間の潜在的な相互作用を減衰するように働く。実際、リストリクタ770、771は、混合T字部723にわたってポンプ715Aと715Bの間の逆流を最小限に抑える。ポンプ715Aが原動力として働き、最も粘性のある液体(例えば、水)を移動させる場合、関連するリストリクタ770が比較的小さい。好ましい一実施形態では、小さいリストリクタ770は約0.025cm内径×20cm長さであり、大きなリストリクタ771は約0.025内径×45cm長さである。別の好ましい実施形態では、小さなリストリクタ770は約25μm内径×20cmであり、大きいリストリクタ771は約25μm内径×150cmである。リストリクタは異なっていてもよいが、リストリクタはまた同じ値および寸法を有してもよい。
【0150】
試料を装填するために、針746がよく知られている方法で試料内に配置される。注射器744は、流れが注入バルブ742の点3から点4、点1、点2、針746に通過するように設定された、注入バルブ742内に針746を通して試料を引くように吸引を行う。終了の際、試料は注入バルブ742の点4と1の間でループ745内に配置される。この点では、試料は捕捉カラム752上に置かれることによって、洗浄および濃縮される準備ができている。
【0151】
試料捕捉中に、流れの正確な制御は必要ないが、試料をループ745から捕捉カラム752まで移動させるために、高い流れが望ましい。普通、試料は約4μL/minなどの毛細管スケールである。好ましい一実施形態では、溶媒送液システム720は、試料を捕捉カラム752上に1,000psiだけで移動させるように、5分の期間だけ5から15μL/minで移動する。
【0152】
試料捕捉では、加熱捕捉モジュール750の条件は有利には、高圧/低流から低圧/高流に移行する。これを達成するために、溶媒送液サブシステム720は、圧力制御モードにより加熱捕捉モジュール750を急速に減圧することによって流れを止める。コントローラ(図示せず)は、内部圧力変換器をフィードバックとして使用して、水性または推進ポンプ715Aを流れ制御から圧力制御モードに再構成することによって、急速減圧を達成する。その後、コントローラは基準圧力設定点をゼロに設定し、ポンプ715Aの動作を開始する。有機ポンプ715Bは同様に制御されることが好ましい。別の実施形態では、水性ポンプ715Aだけが、試料捕捉中に運転する。
【0153】
さらに図14を参照すると、システム711がポンプ715A、715Bを運転させると、ピンバルブ726が点5で注入バルブ742内に流れを案内するように閉じられる。注入バルブ742は、流れが点5から、点4、点1まで通過して点2で出て、試料を担持するように設定されている。流れはその後、捕捉バルブ758が開いて点6で廃棄する状態で、加熱捕捉モジュール750内に通過する。その結果、流れは捕捉カラム752を通して案内されるが、その後、T字接続金具756を通して通過して、捕捉バルブ758の点1を介して点6に廃棄する。この流れの結果、試料は捕捉カラム752上を通過する。
【0154】
次に、システム711は溶出運転で使用されるグラジエントを形成する。溶媒送液サブシステム720は、グラジエントを形成するために、上に記載するように運転される。特に、ピンバルブ726は開いて廃棄し、ポンプ715A、715Bはグラジエントが貯蔵毛細管722内に入るまで運転される。これは、大気と300psiの間のシステム圧力であるが、高流につながる。
【0155】
溶出運転を行うために、溶媒送液サブシステム720は、グラジエントを送液するために上に記載したように運転されるポンプ715Aを有する。グラジエントは、注入バルブ742の点5に入り、点6で捕捉カラム752内に出る。捕捉バルブ758が経路を効果的に閉じて廃棄する状態で、流れはT字接続金具756および分析カラム767を通して質量分光システム(図示せず)まで通過する。有機ポンプ715Bは溶出運転中に流れを運んでいないが、ポンプ715Bはまたゼロ流に設定しながら圧縮する。あるいは、ポンプ715Aは混合T字部723にわたって流れを押し込み、汚染につながる。別の方法では、汚染が認められる可能性があり、その後のグラジエント形成の前に、ポンプ715A、715Bを洗浄のために運転させて廃棄することができる。
【0156】
次に図15を参照すると、別の溶媒送液システム820が捕捉応用例システム811の使用で示されている。当業者に分かるように、システム811は上に記載したシステムと同様の原則を利用している。したがって、可能な限り同様な要素を示すのに、「8」という数字を最初に付けた同様の参照数字が使用されている。システム811の主な違いは、補助溶媒マネージャ(ASM)860およびASM860を収納するための変更配管の追加である。システム811は、試料装填、試料捕捉およびグラジエント形成の動作間のより大きな平衡を可能にする。加えて、より少ない流れ遮断および単一組成捕捉動作を実現することができる。
【0157】
ASM860は、注入バルブ842の点5に連結された追加のポンプ862を有する。捕捉カラム852に連結するよりは、注入バルブ842の点6は捕捉バルブ858の点4に連結する。溶媒送液サブシステム820の出力は、捕捉バルブ858の点2に連結し、それによって捕捉カラム852は、コントローラ(図示せず)によって選択されるように、注入バルブ842または溶媒送液サブシステム820から流れを受けることができる。
【0158】
試料装填およびグラジエント形成は同時に行うことができると考えられる。捕捉バルブ858に連結された溶媒送液サブシステム820の出力を有することによって、試料マネージャ440Bは隔離され、それによってこれらの動作は同時に起こることができる。加えて、試料捕捉およびグラジエント形成が並行して起こる可能性がある。グラジエントが図14に関して上に記載したように形成される間に、ポンプ862は流れを点5で注入バルブ842内に押して点4へ、ループ845を通し、点1を通って、点6で出る。流れは、点4で捕捉バルブ858内に進んで、点3で捕捉カラム852内に出る。捕捉カラム852を出る際に、流れは移動してT字部856を介して廃棄し、また点1で捕捉バルブ858内に移動して、点6で出る。
【0159】
溶出運転中に、有機ポンプ815Bが圧縮するがゼロ流に設定されながら、水性ポンプ815Aが流体の原動力である状態で、上に記載したのと極めて同様に動作する。したがって、グラジエントは貯蔵毛細管822から点3で捕捉バルブ858内に移動して、点2で出る。捕捉バルブ858から、廃棄のための経路が閉じられているので、流れは捕捉カラム852を通して分析カラム867内に通過する。
【0160】
システム811の構成はまた有利には、構成部品の最適化を可能にする。例えば、ポンプ862は普通、高い流れ、すなわち20μL/minで運転し、水性ポンプ815Aは1μL/minのごく僅かで運転する可能性がある。この流れ範囲をカバーするのに単一の変換器を使用しようと試みるのではなく、各ポンプ815A、862は関連する範囲に特に調整された流量変換器を有することができる。
【0161】
ピークパーキング実施形態
次に図16を参照すると、例えば図11の分析サブシステム604まで溶媒送液サブシステム620の溶出流量を急速に小さくするプロセスが示されている。明確にするために、またこのピークパーキングを効率的に達成するのに同じ構成部品を使用することができるので、図11が再び言及されている。ピークパーキングはまた、図4に示すものなどの多くの他の流体クロマトグラフィシステムの構成で行うこともできることが考えられる。図11では、送液ポンプ、普通は631Aだけが、新しい所望の流れに対して「傾斜」する。というのは、これが、グラジエントが分析カラム676に運ばれている場合の流体送液に関連する唯一のポンプだからである。図4の場合、両方の変換器213AB、233ABは傾斜プロセスを制御するのに利用される。図16のステップS1では、検出器669による関連する単一の溶出ピークの検出の際、コントローラ625はバルク流れを分析サブシステム604に「パーキング」または減少させるように信号を受ける。一実施形態では、分析サブシステム604はパーキング信号をコントローラ625に送信する。ステップS2では、コントローラ625は圧力変換器631A、631Bから既存のシステム圧力測定値を記憶する。
【0162】
ステップS3では、コントローラ625は新しい小さな目標圧力を算出し、圧力変換器631A、631Bを使用して閉ループ流れ制御から閉ループ圧力制御に切り換える。コントローラ625は、以下の式に従って、LC機器611の直線「オーム」流体負荷を推定することによって、新しい小さな目標圧力を算出する:
R=送液圧力÷送液流れ
式中、Rは抑制充填である。すなわち、小さな圧力を測定するために、コントローラ625は所望の流量減少として同じ比率で必要とされる小さな圧力を目標としている。例えば、9000psiのシステム圧力で300nL/minでのシステム送液流体であるとする。これは、30psi/(nL/min)のシステム負荷に相関している。目標流量が50nL/minである場合、このシステムに対する目標圧力は1500psiである。
【0163】
ピークパークイベントの持続時間によって、コントローラ625は、より正確で再現可能な流れ送液のために、小さな流れ設定で流れ制御モードに戻るように移行することができる。圧力モードでの動作は、より速い減圧反応時間の利点を提供する。というのは、流量変換器633A、633Bは圧力変換器631A、631Bと比べてはるかに小さい信号帯域幅を有するからである。その結果、溶出流量は最大50分の1以上に小さくすることができる。
【0164】
ステップS4では、溶出ピークの検出が完了し、コントローラ625は、記憶したシステム圧力測定値を新しい圧力目標として使用して、ステップS1からS3を逆にすることによって、通常の溶出流量に流れを戻す。従来の高圧混合方式を凌ぐこの方法の利点は、グラジエントが予備成形され、単一の流体駆動ポンプ(例えば、水性ポンプ615A)のみが使用されて流れ変化を行うので、圧縮エネルギーが取り出されるまたは流体流内に戻される場合のグラジエントの破損に関連する問題が取り除かれるということである。
【0165】
カラムとのグラジエント貯蔵装置の同一配置の実施形態
次に図17から図19を参照すると、LC機器の性能は、グラジエント遅延時間、すなわち貯蔵毛細管または配置からカラムに、予備成形したかどうかに関わらずグラジエントを送液するのにかかる時間を短くすることによってさらに改良することができる。大まかには、グラジエント遅延時間は、グラジエント貯蔵装置をカラムに同一配置、または直接連結することによって短くすることができる。さらに、グラジエント分散はまた、同一配置によって減少し、試料注入時間は注入により高いグラジエント形成流量を使用することによって短くなる。
【0166】
図17を参照すると、通気バルブを備えていないグラジエント貯蔵装置を使用するLC機器を例示した、いくらか略図的なブロック図が全体的に911と言われている。当業者が分かるように、LC機器911は上に記載したシステムと同様の原則を利用している。したがって、以下の説明は大きな違いを対象としている。上のシステムと同様に、LC機器911は、MS検出器969の分析カラム967にグラジエントを送液するために、ループ945を有する注入バルブ942を備えている。注入バルブ942は、バイナリポンプ920、注射器944、および試料容器946に連結されている。
【0167】
LC機器911の違いは、グラジエント貯蔵装置922が注入バルブ942と分析カラム967の間に設けられているということである。グラジエント貯蔵装置922は、高い流量でのグラジエント装填、および通常の流量での送液を可能にする。グラジエントが装填された場合に発生する背圧は、グラジエントが運転している場合に作り出されるものより数倍も高い可能性がある。例えば、3.5μm粒子が詰められた25μm内径×10cm長さの分析カラム967では、試料装填およびグラジエント予備成形が、試料装填時間を短くするように分析カラム967をオンラインにした状態で、約8,000psiの圧力により250nl/minで起こる。一方、グラジエント送液は、超高感度分析のために約800psiによる25nl/minで起こる。グラジエントが高い流量で装填されているので、試料は実行時間(例えば、実行時間の試料装填時間部分)を効果的に短くするように同時に注入することができる。
【0168】
グラジエント貯蔵装置922は、分析カラム967に直接連結することができる。グラジエント貯蔵装置922を分析カラム967のより近くに配置することによって、グラジエントを送液する際の遅延が最小限に抑えられ、グラジエントの分散が少なくなる。グラジエント貯蔵装置922は、あらゆる充填マトリックスを備えたまたは備えていない毛細管配管の空の部分と同じくらい扱いやすい。グラジエント貯蔵装置922の内径は、分析カラム967と同様の内径をしているが、グラジエント貯蔵装置922の容量はグラジエント容量と等しいまたはこれよりいくらか大きいことが好ましい。別の実施形態では、グラジエント貯蔵装置922は分析カラム967と一体である。
【0169】
グラジエント装填時間をさらに短くするために、合計グラジエント遅延容量(すなわち、注入ループ容量およびグラジエント貯蔵装置容量)は、グラジエント容量と等しくまたはこれより僅かに大きくされる。上記利点を鑑みて、対象技術は幅広い応用例を有すると考えられる。例えば有利には、約300nl/minでグラジエントを形成し、約30nl/minでグラジエントを送液するように、オフライン2Dシステムの第2の寸法分離などの高スループット分離で、またはより狭いナノカラム(例えば、25μm内径)を使用する超感度分析で適用することができる。
【0170】
図18を参照すると、通気バルブを備えたグラジエント貯蔵装置を使用する別のLC機器を例示するいくらか略図的なブロック図が全体的に、参照番号911Aで参照されている。LC機器911Aが機器911と同じ構成部分の多くを有するということを示すために、可能な限り同様の要素を特定するために「A」という接尾辞を使用している。LC機器911Aは、上記のものと同様であるが、グラジエント貯蔵装置922Aと分析カラム967Aの間に捕捉カラム952Aおよび通気バルブ941Aを備えている。通気バルブ941Aを使用することによって、LC機器911Aは捕捉カラム952Aとの使用に十分適している。通気バルブ941Aの追加により、所望のように運転圧力より低い装填圧力でLC機器911Aを作動することが可能である。
【0171】
次に図19を参照すると、比較的低い装填圧力でLC機器911Bを作動させることが可能な別の配置を備えたさらに別のLC機器911Bが示されている。LC機器911Aが機器911、911Aと同じ構成部分の多くを有するということを示すために、可能な限り同様の要素を特定するために「B」という接尾辞を使用している。LC機器911Bは、捕捉カラム952Bと分析カラム967Bの間にT字接続部923を備えている。T字接続部923は、図示および上に記載したように、廃棄のための流路を最終的に作り出すことができるバイナリポンプ920Bまで延びている。実際、T字接続部923は図18の通気バルブ941Aと同じ機能を果たす。LC機器911Bはまた、図15に関して示し、上に記載したのと同様のアイソクラテックポンプ962および捕捉バルブ958を有する。これらの同一配置実施例から分かるように、試料装填時間を短くするように、極めて高い流量を使用してグラジエントを装填するのと同時に試料が注入されると考えられる。
【0172】
当業者が分かるように、対象技術は低流高圧応用例に対する明らかな利点を備えた様々な応用例での溶媒送液サブシステムとして使用するように適用可能なだけでなく、有利には多くの応用例で使用することができる。例えば、対象技術は捕捉カラムを備えていないシステムに極めて適用可能である。いくつかの要素の機能は、代替実施形態では、より少ない要素、または単一の要素で行うことができる。同様に、いくつかの実施形態では、あらゆる機能要素は、例示した実施形態に関して記載したのより少ないまたは異なる動作を行うことができる。また、例示する目的で別個に示した機能要素(例えば、圧力および流量変換器など)は、他の機能要素内に組み込む、異なるハードウェア内で分離させる、または特定の実施のための様々な方法で分配することができる。さらに、相対寸法および位置は単にいくらか略図的なものであり、同じものだけでなく多くの他の実施形態も様々な描写を有することができることを理解されたい。
【0173】
本発明は特定の例示的な実施形態に関して説明したが、当業者は様々な変更および/または変形を本発明の精神または範囲から逸脱することなく本発明に加えることができることがすぐに分かるだろう。
【0174】
参照としての援用
本出願全体を通して引用した全ての参照文献(文献、発行特許、公開特許出願、および同時係属特許出願を含む)の内容は、全体を参照として本明細書に明示的に援用する。
【0175】
同等物
当業者は、日常的な実験にすぎないものを使用して、本明細書に記載した本発明の特定の実施形態の多くの同等物を認識する、または確定することが可能である。このような同等物は、特許請求の範囲に含まれることを意図している。
【図面の簡単な説明】
【0176】
【図1A】どのように図1Aおよび図1Bを適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLC機器を示す略ブロック図である。
【図1B】どのように図1Bと適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLCを示す略ブロック図である。
【図2】対象技術による、図1Aと機器内で混合物を送液するプロセスの流れ図である。
【図3】図1Aおよび図1BのHPLC機器の内容で、動作のサイクル中の流れおよび圧力変化を示すタイミング図である。
【図4A】どのように図4Bと適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLC機器を示す略ブロック図である。
【図4B】どのように図4Aと適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLC機器を示す略ブロック図である。
【図5】対象技術による流れ制御方式を示すように、より詳細な図4Aおよび図4Bの制御手段の略図である。
【図6】対象技術による、図4A、図4Bおよび図5の機器と等価の電気回路である。
【図7】対象技術によるフィードフォワード補償の利用をさらに特に示すように示された、図4Aおよび図4B機器のさらに詳細な図である。
【図8】対象技術によるフィードフォワード信号の特定の成分をさらに特に示すように示された、LC機器のさらに詳細な別の図である。
【図9】対象技術により、エネルギーまたは電荷Csを負荷に与えるようにシステムまたは負荷流れIsを有するLC機器と等価の別の電気回路である。
【図10】対象技術により、フィードフォワード信号を使用するハイブリッド方法を特に示すように示された、LC機器のより詳細なさらに別の図である。
【図11】対象技術により、グラジエントを予備成形する溶媒送液サブシステムを使用して、正流ナノスケールHPLCシステムを示す略ブロック図である。
【図12】対象技術により、図1のシステム内でグラジエントを形成および送液するプロセスの流れ図である。
【図13】対象技術による、異なるカラムを使用した一連の注入運転を行う場合に、遅い流れ開始を避けるプロセスの別の流れ図である。
【図14】対象技術による、溶媒送液サブシステムを使用した、正流ナノスケール捕捉システムを示す略ブロック図である。
【図15】対象技術による、追加のポンプを備えた溶媒送液サブシステムを使用した別の正流ナノスケール捕捉システムを示す略ブロック図である。
【図16】対象技術によるピークパーキングのプロセスの別の流れ図である。
【図17】対象技術による、通気バルブを備えていないグラジエント貯蔵装置を使用するLC機器を示す略ブロック図である。
【図18】対象技術による、通気バルブを備えたグラジエント貯蔵装置を使用する別のLC機器を示す略ブロック図である。
【図19】対象技術による、通気バルブ、バイナリバルブおよびアイソクラテックバルブを備えたグラジエント貯蔵装置を使用するさらに別のLC機器を示す略ブロック図である。
【技術分野】
【0001】
本出願は、参照として本明細書に全体を援用する、2006年3月17日出願の米国仮特許出願第60/783,610号に対する優先権を主張する。
【背景技術】
【0002】
液体クロマトグラフィ(LC)は、アナライトまたは試料を検査する分析技術である。LCシステムは普通、固定相材料を詰まられた1つまたは複数のカラムを有する。一般的に、「カラム」という用語は、クロマトグラフィ性の分離を行うためのカラム、カートリッジ、毛細管などのことを言う。カラムは普通、固定相を詰められまたはこれが装填されている。この固定相は、粒子状物質またはビード状物質、あるいは多孔質モノリスまたはほぼ不活性材料であってもよい。本開示の目的で、「カラム」という用語はまた、固定相に詰められていないまたはこれが装填されていないが、分離を行うために内部毛細管壁面の表面積による毛細管のことを言う。
【0003】
アナライトと混合された移動相材料または溶液はカラム内に汲み上げられ、固定相材料はアナライトを分離および隔離する。移動相材料は、液体、気体、超臨界流体またはその混合物などのあらゆる流体を含むことができる。しばしば、アナライトは直接カラムからインライン検出器まで溶出して、クロマトグラムを生成させる。
【0004】
普通、アナライトは僅かな量だけで利用可能であり、それによって最小量でさえも無駄にしないように細心の注意を払わなければならない。したがって、LCシステムは、参照として本明細書に援用する、米国特許第6,299,767号に記載されたようなナノ寸法毛細管であるカラムで少量の試料またはナノ流に作用するように設計されている。
【0005】
いくつかのシステムは、移動相材料またはグラジエントを正確におよび効率的に運ぶために開発された。グラジエントの送液はしばしば、例えば高圧液体クロマトグラフィ(HPLC)システムなど、高圧などの厳しい制約下にある。例えば、米国特許第6,858,435号および第6,610,201号は、溶媒組成が形成および送液される様々な技術を記載している。先入れ後出し(FIFO)は、グラジエントを形成および送液するための普通に使用される技術である。
【0006】
上に記した進歩にも関わらず、ナノ流LCシステムには多くの固有の制限が残っている。ごく普通に、グラジエントはカラムによるリアルタイムの即座の使用のために形成される。ランは1時間かかることがあるので、厳しい環境でグラジエントの適切な混合物を維持する難しさが増す。特に、ナノ流LCシステムは、ナノ寸法流変換器を利用する。
【0007】
しかし、特定の応用例に十分適切であるが、ナノ寸法変換器は限られたダイナミックレンジを有し、熱影響に有害に曝される。温度が変動する可能性がある、1時間などの普通の期間にわたるグラジエントの形成は、変換器の熱ドリフトによるひどい混合一貫性につながる。さらに、変換器が2μLの液体を保持することしかできないナノ寸法で、流体の高圧圧縮により、誤った変換器読取が生成され、それにより混合物が損なわれる。高圧動作はまた、雑音レベルが許容できなくなる可能性がある、変換器のダイナミックレンジの境界である。すなわち、変換器に関連する限られたレンジ、雑音、および熱ドリフトは、所望の性能を満たす障害物である。
【0008】
例えば、0から5nL/minのキャリブレーション範囲を有し、250nL/minの溶出流量で動作する市販のナノ流熱風速計式の変換器は、3%の初期クロマトグラフィ開始組成に対して、7.5nL/minまでの有機ポンプの繰り返し可能キャリブレーション性能が必要である。これは、達成するのが容易な性能仕様ではない。というのは、装置の雑音レベルが±5nL/minの高さであり、熱補償のない雑音に対する熱感度が±4nL/min/℃を超える可能性があるからである。したがって、器具温度の1度の変化が、ほぼ50%の組成誤差につながる可能性がある。この誤差を修正する目的で、一般的な市販の直接ナノ流LCシステムは、流量変換器を補償するために、温度感知要素での外部熱補償方式を利用している。熱感度の影響を補償する際のこのような試みにより、内在する問題に対処することなく、LCシステムの複雑性が非常に大きくなる。
【0009】
しばしば、LCシステムへのバルク流は、流れを開始および停止する、流量を変更する、および動作間の流れを移行する間に変えられる。バルクまたは溶媒流変化中に、混合点またはノードにわたって所望の組成混合物を維持することは難しい。例えば、LCシステムの定常状態背圧が極めて高い(例えば、5,000psiより大きい)場合、2つの流体流(例えば、溶媒およびアナライト)は、混合ノード前に明らかに異なる流体性状(すなわち、水性および有機溶媒)を有する。比較的ゆっくりな反応時間(すなわち、何秒かの時定数)を有する流量変換器などの固有の制限により、システムを反応良くし、所望の組成混合物を維持することを可能にするのに十分迅速には、必要なフィードバックは与えられない。
【0010】
例えば10,000PSIから200PSIまでの急速な圧力変化は、カラムなどの重要で高価な構成部品を破壊させる可能性がある。最低限でも、圧縮および減圧のサイクルは、実際に何も起こっていない場合に明らかな流れを作り出す。また、流体の圧縮性変化は誤った読取を作り出す。というのは、変換器は本質的に、背圧が普通は大きい範囲の圧力にわたって揺動するときのこのような急速な流体密度変化と、ある程度、流体の断熱昇温効果に敏感だからである。したがって、フィードバック制御を使用して多数の溶媒ポンプ間の流れを調整するLCシステムは、ナノ流変換器への急速圧縮性変化および加熱により正確な測定流を維持することができない。
【0011】
従来技術のLCシステムの別の欠点は、混合ノードにわたる流量変換器の直交流および逆流汚染であり、これによりLCシステム流体流の汚染、および変換器に対する流れキャリブレーションの一時的損失につながる。急速な減圧中、またはグラジエントの通常のクロマトグラフィ送液中に、流体の粘度が低下する(すなわち、より高い有機となる)と、従来技術のLCシステムは流れを混合ノードを通して逆流させる必要がある。変換器の逆流汚染を和らげるために、流量変換器と混合ノードの間の連結導管は、混合T字部の減圧量に対応するような寸法をしている。しかし、追加の量は変換器のものと一緒にされ、さらに上に記した急速な圧縮性変化の問題を深刻にする。したがって、従来の高圧混合システムは、極めて高い圧力で混合ノードにわたってクロス汚染(cross contamination)の影響を極めて受けやすい。
【0012】
さらに、混合ノードにわたるクロス汚染は、流体相互作用結合により生じる、2つの流量変換器の間にフィードバック不安定性を作り出す可能性がある。クロス汚染はまた、制御相互作用を積極的に安定化するように、高圧混合システムが必要とするはるかに大きい分断リストリクタに関連する大きな寄生圧力低下による、最大動作圧力の損失を大きくする。前のLCシステムは、これらの問題を認識し、グラジエント形成ポンプをLCシステムの高圧部分から隔離するように、余分なポンプ、複雑な配管方式およびバルブを提案した。このような費用がかかり複雑な解決法は望ましくないだけでなく、問題も残った。
【0013】
さらに、いくつかのLC応用例は、注入動作、例えば試料トラッピングおよび2Dクロマトグラフィの間のカラムの特定の選択に対する動作流量を変える必要がある。流量は、各カラムの選択の間で開始および停止させなければならない。従来技術のシステムは、このような流量変化を達成するために、基本的に流れのない状態でバルブ切換のいくつかの手段を利用していた。バルブ切換構成部品は、望ましくない方法で費用および複雑性を大きくしながら、LCシステムの信頼性を妨げている。
【0014】
他のシステムはまた、感度を大きくするおよび/またはより多くのデータを試料から収集する目的で開発された。例えば、米国特許第6,858,435号は、試料液体で様々な種を適当に感知する際に検出器が有することがある問題を克服するために、可変流またはピークパーキングを利用するLC分析システムを開示している。LC分析システムが興味のあるピークを検出する場合、LC分析システムは、溶出流量を迅速に減少させる(すなわち、20から50分の1の流れの減少)ようにマイクロ切換バルブを制御する。その結果、カラム分離化合物の溶出時間は検出を良くするために延長される。分析後、LC分析システムは通常の溶出流量を復元する。また、望ましくないピークパーキングを達成する追加の構成部品の利用により、システムの費用および複雑性が増す。
【0015】
LC分析の効率を良くする別の方法は、0.025から100ul/minの流量などのマイクロスケールまたはナノスケールの流量を利用することである。このような流量を使用することによって、LC分析システムは超高感度分析を実現することができる。しかし、グラジエント遅延および分散が問題となる。さらに、試料装填時間、およびそれによって全体の実行時間は望ましくないほど長くなる。
【0016】
上の説明から分かるように、閉ループフィードバック機構がLC分析システムに対して開発された。しかし、さらに優れた制御の必要があり、従来技術のシステムはフィードフォワード開ループ機構を使用していない。フィードフォワードは、誤差を最小限に抑えるまたは防ぐように、システム内の変化に反応するための方法である。
【発明の開示】
【発明が解決しようとする課題】
【0017】
上記を鑑みて、従来技術の上記問題を克服するクロマトグラフィ装置に溶媒を送液するシステムが必要である。
【課題を解決するための手段】
【0018】
本発明は、液体クロマトグラフィ装置に溶媒を送液するシステムおよび方法を提供することによって、上記およびその他の問題に対処する。発明者は、従来の閉ループフィードバック制御で、流体圧縮性の影響を補償するためにフィードフォワード制御方法を使用することによって、溶媒の最終的な調整および送液をかなり改良することができることを発見した。
【0019】
一実施形態では、対象技術は、試料を分離カラム内に案内するインジェクタを有する液体クロマトグラフィ装置にグラジエントを送液するシステムを対象としている。このシステムは、第1のインライン圧力変換器および第1の流量変換器を通して案内される水性出力を作り出す水性ポンプを有する第1の行程(leg)と、第2のインライン圧力変換器および第2の流量変換器を通して案内される有機出力を作り出す有機ポンプを有する第2の行程と、行程を制御する処理装置とを備えている。処理装置は、変換器の少なくとも1つの上流側で寄生損失を克服するように変換器の少なくとも1つから導き出された信号に基づいて、修正制御信号を発生させる閉ループフィードバックモードと、システムの蓄積エネルギーのパラメータに基づいて予測制御信号を発生させる開ループフィードフォワードモードを含み、予測制御信号は水性出力と有機出力の間の圧縮比に基づき圧縮流を算出し、処理装置は異なるモードで各行程を選択的に操作することができる。
【0020】
別の実施形態では、対象技術は、ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第1の行程と、ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第2の行程と、変換器からの信号に基づいて各ポンプに指示を与えるコントローラと、第1および第2の行程からの出力を混合するノードとを備えた流体クロマトグラフィ機器を対象としており、コントローラは、ノードにわたって組成制御を維持するために、エネルギーを蓄積して第1および第2の行程内の流体の圧縮性を制御する第1および第2の行程の能力に基づいて、第1および第2のポンプにフィードフォワード信号を提供することができる。
【0021】
一実施形態では、圧縮および再圧縮のサイクルは、流体外乱を最小限に抑えるようにフィードフォワードアルゴリズムおよび/またはリニアバルブを使用することによってしっかり制御されている。さらに、スマートに使用するとポンプなどのいくつかの構成部品が、追加の構成部品の必要性を少なくすることができる。
【0022】
別の実施形態では、ナノ流溶媒送液システム内にグラジエントを予備成形する改良型のシステムにより、グラジエントを効率的に作り出し送液することが可能になる。さらに、ポンプなどの追加の構成部品を加えることによって、溶出運転およびセットアップ時間を少なくするのと同時に前の連続動作を行うことができる。
【0023】
したがって、一態様では、本発明は貯蔵毛細管を充填するポンプを有する液体クロマトグラフィシステムにグラジエントを形成する方法を提供する。この方法は、貯蔵毛細管を大気に通気させるステップと、グラジエントが中に形成されるまで貯蔵毛細管を充填するように比較的低い圧力およびより高い流量でポンプを運転させるステップとを含んでいる。貯蔵毛細管の最適化した容量幾何形状は、背圧の形成およびグラジエント分散を最小限に抑えるような長さおよび内径の寸法をしていることが好ましい。別の実施形態では、貯蔵毛細管の捕捉容量は、グラジエントおよびグラジエントを分離カラムに移動させるのに必要な輸送容量のオーバーヘッドに対応するような寸法をしている。
【0024】
ポンプは実際、水性ポンプおよび有機ポンプであってもよく、各ポンプはポンプと貯蔵毛細管の中間で混合ノードに連結されている出力を有する。グラジエント送液中、有機ポンプはオフラインであり、大気への通気は閉じられ、水性ポンプはグラジエントを分離カラムまで送液するように運転する。貯蔵毛細管をパージするために、貯蔵毛細管は大気に通気され、ポンプの少なくとも1つが別のグラジエントを形成する準備のために運転される。
【0025】
基本的に大気に通気された貯蔵毛細管でのグラジエントの形成により、以下の3つの重要な機能が達成される。1)カラムまたは他の連結された消耗品とは別に、背圧の形成が貯蔵毛細管の幾何形状により正確に制御される。2)注入運転間のカラムの平衡状態を狂わせるのを防ぐために、貯蔵毛細管内の流体がパージされて廃棄される。3)形成中の流れの開始および停止による、形成されたグラジエントをひとまとめにするあらゆる先行または後行組成異常が、システムの一次流体流から離れるように、すなわち分析部分およびその中のカラムから離れるように案内される。
【0026】
さらに、低圧でのグラジエント形成の分離、および高圧でのグラジエントのアイソクラテック送液により基本的に、高圧混合および送液の従来の方法と比べて、流量の変化に対する溶媒混合物組成精度の相互依存結合がなくなる。すなわち、対象技術は、運転中にグラジエント混合物を変えない、送液と直交したグラジエント形成を行う。
【0027】
対象技術の別の利点は、変換器のフルスケールキャリブレーションにより近くで高い流量のグラジエントを形成する溶媒送液システムを提供することであり、それによって変換器のゼロ流キャリブレーションでの、またはそれに近くでの性能を拡張する必要とする、溶出流量のはるかに下に流量変換器のダイナミックレンジを拡張する必要性がなくなる。このようにして雑音および熱ドリフトに非常に影響を受けやすい変換器領域を避けることによって、グラジエント組成精度を改善しながら、流量変換器の熱補償および特徴への必要性および追加費用がなくなる。
【0028】
対象技術の別の利点は、グラジエントを作り出すための短い時間間隔であり、それによって実際に熱効果によるクロマトグラフィ保持時間の変動がなくなる。グラジエントを短い時間間隔で形成することによって、温度効果に対する感受性が取り除かれる。したがって、熱補償に対する必要性も少なくなるかまたはなくなる。
【0029】
低圧でのグラジエント形成および単一ポンプによるその後の送液の別の利点は、混合T字部にわたる所望の組成混合物を維持する容易性である。
【0030】
別の態様では、本発明はグラジエントをナノ流毛細管液体クロマトグラフィ装置に与えるシステムを提供する。このシステムは、第1の出力を作り出す水性ポンプと、溶液を作り出す第1の出力と混合された第2の出力を作り出す有機ポンプと、ポンプを制御する処理装置とを備えている。貯蔵毛細管は、溶液の一部から形成されたグラジエントを受ける。接続金具は貯蔵毛細管の出力に接続されており、接続金具はナノ流毛細管液体クロマトグラフィ装置に接続された第1の出口、および第2の出口を形成する。バルブは、第2の出口に接続し、貯蔵毛細管内でのグラジエントの形成中に、水性および有機ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御される。
【0031】
システムはまた、第1の出力を受ける第1のインライン圧力変換器および第1の流量変換器と、第2の出力を受ける第2のインライン圧力変換器および第2の流量変換器とを有し、各変換器は閉ループフィードバック制御を行うように処理装置と通信していることが好ましい。一実施形態では、貯蔵毛細管、接続金具およびバルブは、分離カラムの熱管理区画内に共に配置されている。
【0032】
対象技術の別の利点は、極めて迅速な流れ変化、定常流動作への戻り、および上記の重大な混合物汚染および安定性制御の問題の除外を可能にする圧力および流量変換器両方を有する制御手段での単一ポンプによるグラジエント送液を行うことである。その結果、対象技術は、従来の高圧混合システムと比べて、極めて高い圧力で可変流れまたはピークパーキング動作を行う要件に容易に対応する。さらに、システムの高圧部分からのグラジエント形成ポンプの所望の隔離を有する試みにおいて、余分なポンプ、複雑は配管方式およびバルブに対する必要性がなくなる。
【0033】
別の態様では、本発明はLC装置用の溶媒送液サブシステムを提供する。溶媒送液サブシステムは、第1の出力を作り出す第1のポンプと、そのパラメータを監視するために第1の出力を受けるように接続された第1の変換器と、溶媒混合物を作り出すために第1の出力と混合された第2の出力を作り出す第2のポンプと、そのパラメータを監視するために第2の出力を受けるように接続された第2の変換器と、第1および第2の出力を組み合わせる混合ノードと、第1と第2のポンプの間の受動流体分離を行って混合ノードにわたる制御相互作用を安定化するように、各ポンプと混合ノードの間の制限導管とを備えている。導管は、第1および第2の変換器の上流側の毛細管リストリクタであることが好ましい。
【0034】
対象技術の別の利点は、混合ノードにわたる流量変換器の直交流および逆流汚染を防ぐことである。さらに別の利点は、流れコントローラの間のフィードバック不安定性を防ぐことである。さらに別の利点は、大きな分離リストリクタの必要性を軽減することによって、より大きな分離リストリクタの大きな寄生低下の原因である最大作動圧力の損失を少なくすることである。
【0035】
本発明の別の態様は、試料を分離カラムに案内するインジェクタを有する、液体クロマトグラフィ装置にグラジエントを送液するシステムを提供する。システムは、第1のインライン圧力変換器および第1の流量変換器を通して案内される第1の出力を作り出す水性ポンプと、第2のインライン圧力変換器および第2の流量変換器を通して案内される第2の出力を作り出す有機ポンプと、変換器の上流側の損失を回避するように、変換器の少なくとも1つからの信号に基づき閉ループフィードバックモードでポンプを制御する処理装置とを備えている。
【0036】
システムは、第3の出力を作り出すように第1および第2の出力を混合する第1の接続金具と、グラジエントを形成する貯蔵毛細管とを有する。グラジエントは第3の出力の一部である。貯蔵毛細管は、背圧および分散を最小限に抑えるような寸法をしている。第2の接続金具は貯蔵毛細管に接続されており、第2の接続金具は2つの出口を形成し、第1の出口はナノ流毛細管液体クロマトグラフィ装置に接続されている。バルブは、第2の接続金具の第2の出口に接続され、処理装置によって制御される。貯蔵毛細管内にグラジエントを形成する際、バルブは水性および有機ポンプが運転している間に、留まっている流体を案内して廃棄するように開かれる。ナノ流毛細管液体クロマトグラフィ装置へのグラジエントの送液中に、水性ポンプのみが運転し、有機ポンプはオフラインである。
【0037】
対象技術のさらに別の実施形態は、ナノ流毛細管液体クロマトグラフィ装置の第1のカラムを適合させるように、グラジエントの送液の作動流量を変えるシステムを対象としている。システムは、圧力変換器および流量変換器を通して案内される出力を作り出すポンプと、出力の一部からグラジエントを形成する貯蔵毛細管と、ポンプを制御して、変換器から信号を受ける処理装置とを備えている。
【0038】
処理装置は、指示セットを記憶するメモリ、および指示セットを実行するプロセッサを有する。プロセッサは、ナノ流毛細管クロマトグラフィ装置の第2のカラムが再平衡された場合に、注入の最後に圧力変換器からシステム圧力測定値を記憶するように動作する。プロセッサはまた、ナノ流毛細管クロマトグラフィ装置への流れを止め、特に第1のカラムに適合された新しいグラジエントを形成し、目標圧力をシステム圧力測定値と等しくなるように設定し、第1のカラムに対してユーザによって選択された流量を受けるおよび記憶し、圧力変換器からフィードバックでの閉ループ圧力制御においてポンプを使用して、システム圧力を第1の目標圧力にするように動作する。第1の目標圧力に到達する際に、処理装置は、ポンプを運転することによって新しいグラジエントの送液を再開するように、流量変換器をフィードバックとしてまた流量を目標流量として閉ループ流制御にポンプを移行する。
【0039】
システムはまた、第2の圧力変換器および第2の流量変換器を通して案内された出力を作り出す第2のポンプと、ポンプの出力を組み合わせるように貯蔵毛細管に連結された混合ノードと、貯蔵毛細管に連結されたバルブとを有することが好ましい。バルブは、システムの作動圧力より下の圧力に貯蔵毛細管に通気させるように、プロセッサによって制御される。
【0040】
システムの複雑性を加えることなく、単純で、効率的および迅速な方法で流量を変えることを実現することが、対象技術の別の利点である。さらに別の利点は、捕捉応用例において長い時定数を乗り越えることができることである。
【0041】
本発明のさらに別の態様は、抑制カラムと直列な短い捕捉カラムを有するクロマトグラフィ装置用の溶媒送液システムを提供する。溶媒送液システムは、第1の出力を作り出す第1のポンプと、第1の出力を受けるように連結された圧力変換器および流量変換器とを備えている。第2のポンプは、溶媒混合物を作り出すように、第1の出力と混合された第2の出力を作り出す。第2の圧力変換器および第2の流量変換器は、そのパラメータを監視するために第2の出力を受けるように連結されている。混合ノードは第1および第2の出力と組み合わされる。コントローラは、閉ループフィードバックでポンプを作動させる。コントローラは、圧力制御モードで閉ループフィードバックに圧力変換器を使用し、流れ制御モードで閉ループフィードバックに流量変換器を使用し、グラジエントを形成するように流れ制御モードで両方のポンプを使用し、グラジエントを送液するように第1のポンプのみを使用し、圧力制御モードを使用して抑制カラムと直列な短い捕捉カラムを迅速に減圧することによって流れを止め、基準圧力設定点をゼロに設定し、抑制カラムと直列な短い捕捉カラムの長い時定数を乗り越えるために第1のポンプの動作を開始するようにプログラミングされている。
【0042】
さらに別の態様では、本発明は、混合物からグラジエントを予備成形するステップと、閉ループフィードバックに流量変換器を使用することによって流量を制御するステップと、圧力変換器を使用することによって送液圧力を監視するステップとを含む、液体クロマトグラフィシステムでのピークパーキング(時々、可変流と呼ばれる)方法を提供する。関心のある溶出ピークに基づいて流量を少なくする信号に基づき、目標圧力は送液圧力に基づき算出される。流量は、目標圧力を設定点とした閉ループフィードバックとして圧力変換器を使用することによって制御される。
【0043】
本発明の実施形態はまた、組成を制御する、または流体混合物の完全性を維持する方法および装置を対象としている。混合物を形成する化合物の圧縮性の差により、化合物は異なるように流れる可能性がある。例えば、有機化合物は普通、水溶液より圧縮性がある。有機化合物を含むブランチ、および水性化合物を有するブランチを有する導管内で流れが突然止まると、有機化合物を含むブランチは、圧力変化に関連する容量のより大きな変化を受ける可能性があり、異なるようにエネルギーを蓄積する可能性がある。容量および蓄積したエネルギーのこのような変化は、所望の組成から外れる混合物につながる。
【0044】
一実施形態は、少なくとも1つの作動圧力、1つの低圧および流量を含む圧力範囲で導管手段内で運ばれている流体流の内容で使用される装置を対象としている。導管手段は、圧力を受けて流体を推進させるポンプ手段と流体連通している。導管手段は、バルブ手段と流体連通しており、バルブ手段は少なくとも第1の位置および第2の位置を有する。第1の位置では、流体は導管手段内で流れ、第2の位置では、流体は導管手段内に流れない。装置は、制御手段および傾斜(ramp)手段を備えている。制御手段は、バルブ手段と信号通信しており、傾斜手段と信号通信している。傾斜手段は、導管手段内の圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するためのものである。傾斜手段は、(i)第2の位置へのバルブ手段の配置または予測配置に応じて、前記導管手段が前記1つまたは複数の作動圧力にある間に、このような低圧が得られるまで制御手段が第1の斜面内の前記導管手段における選択パラメータを減少させるように前記傾斜手段に命令する、および(ii)第1の位置をとるバルブ手段に応じて、または第1の位置をとるバルブ手段を予期して、1つまたは複数の作動圧力が第2の斜面で得られるまで選択パラメータを増加させるという機能の少なくとも一方を行う。
【0045】
本明細書で使用するように、「ポンプ手段」という用語は、流体を推進させるあらゆる手段のことを言う。これらの手段は、直列および並列ポンプ、タービンポンプ、シリンジポンプ、蠕動ポンプ、動電ポンプ、空気圧増幅器、および圧縮貯蔵装置を通して推進される流体を含んでいる。「流体連通」という用語は、配管タイプの流体接続のことを言う。「バルブ手段」という用語は、流体の流れを遮ることが可能なあらゆる装置を示すのに使用される。クロマトグラフィ機器は、特別な形のバルブである試料インジェクタを有する。
【0046】
本明細書で使用されているように、「制御手段」という用語は、コンピュータ、演算処理ユニット(CPU)、マイクロコントローラ、デジタル信号プロセッサ(DSP)、サーバ、適切なファームウェアまたはソフトウェアでプログラミングされたアナログ装置のことを言う。分析機器はしばしば、動作の態様を制御するコンピュータおよびCPUを有する。ローカルまたは一括コンピュータにより単一の機器および多数の機器を制御するソフトウェアは、当技術分野でよく知られている。「信号通信」という用語は、電気接続または回路、光学接続、電波による無線通信、インターネット接続、および機器がそれによって通信することができる他の手段のことを言う。
【0047】
傾斜手段の別の実施形態は、ポンプ制御手段を備えている。ポンプ制御手段は、別個のコンピュータ、演算処理ユニット(CPU)、マイクロコントローラ、DSP、サーバ、または他の機能を制御する同じ制御手段であってもよい。ポンプ制御手段は、第1の斜面または第2の斜面の少なくとも一方で、圧力を受けて導管手段内に少なくとも1つの流体を配置するように1つまたは複数のポンプに命令するためのものである。圧力を小さくする、または流れを小さくするために、特に小径導管手段を備えたポンプ制御手段は、汲み上げ方向に反転する必要がある可能性がある。
【0048】
本発明の一実施形態は、捕捉カラムからの流れを制御するバルブの形のバルブ手段を特徴としている。本発明の別の実施形態は、試料注入手段の形のバルブ手段を特徴としている。試料注入手段は、試料マネージャ、オートサンプラ、試料モジュールなどのいくつかの名前で、当技術分野で知られている。試料注入手段は、試料が中に配置された導管のループを備えたマルチポートバルブの形をしている。試料をループ内に配置した状態で、マルチポートバルブはポンプ手段と流体連通した導管手段と流体連通したループで配置されている。試料注入手段は、第1の位置および第2の位置を有する。第1の位置では、試料注入手段は、大気圧から低圧までを含む圧力範囲で流体試料を受ける。第2の位置では、試料注入手段は、流体試料をその中に配置するように導管手段と流体連通している。
【0049】
本発明装置の一実施形態は、試料注入手段に引かれた特性を有する。試料注入手段は、試料手段内に圧力を配置するように圧力源で流体制御している。圧力源は、制御手段と信号通信しており、制御手段は試料注入手段を大気圧、または試料を受けるための初期圧力にするように圧力源に命令する。また、試料を受けた後に、制御手段は、圧力を導管手段内の圧力に対応する低圧まで大きくするように圧力源に命令する。
【0050】
装置はさらに、制御手段と信号通信している少なくとも1つの圧力センサを備えていることが好ましい。圧力センサは、流体連通している、すなわち、ポンプ手段、導管手段、およびバルブ手段の少なくとも1つの圧力を測定する。
【0051】
装置は、ポンプ手段を備えていることが好ましい。本発明の一実施形態は、第1の溶媒用の第1のポンプ、および第2の溶媒用の第2のポンプを少なくとも備えたポンプ手段を特徴とする。導管手段は、前記第1のポンプと流体連通する少なくとも1つの第1のブランチと、前記第2のポンプと流体連通する第2のブランチとを備えている。第1のブランチおよび第2のブランチは、T字接続金具で流体連通しており、前記第1の溶媒および第2の溶媒は、流体を含む混合物を形成する。
【0052】
1つのポンプは、圧力に対して傾斜された制御のために前記第1および第2のポンプから選択されていることが好ましい。少なくとも1つのポンプは、流れに基づく制御のために選択されていることが好ましい。流れに対して傾斜されている制御に対して、このようなポンプの流れは圧力に対して傾斜されているポンプの流れを追跡するように制御されていることが好ましく、流体の圧縮量をさらに補償することが好ましい。すなわち、ポンプ追跡流れは、溶媒の圧縮量と非圧縮量の間の差を示す、合計流体プラス流体の追加量の割合としてポンプに期待される、溶媒に対する流れを追跡する。圧力に対して傾斜されたポンプは、水性溶媒のためのものであることが好ましい。また、流れに対して傾斜されたポンプは有機溶媒のためのものである。
【0053】
また、装置は、制御手段と信号通信しており、ポンプ手段、導管手段またはバルブ手段と流体連通している少なくとも1つの流れセンサを有することが好ましい。流れセンサにより、流れの整合が可能になる。本明細書で使用されているように、流れセンサはまた、流れに関連している可能性があるピストン移動に関連するステッピングモータを備えることができる。
【0054】
本発明の装置は、バルブ手段の開閉を導管手段内の圧力斜面と調整する傾斜手段を特徴としている。斜面は、圧力低下の増加が急速ではなく、約10,000ポンド毎平方インチ(psi)毎秒以下の時間にわたる圧力の傾斜を有する意味では緩やかである。傾斜は、10から1,000psi毎秒であることがより好ましく、100から500psi毎秒であることがさらに好ましい。
【0055】
本発明の別の実施形態は、流体の完全性を維持する方法を対象としている。この方法は、少なくとも1つの作動圧力および1つの低圧を含む圧力範囲において、導管手段内で運ばれる流体流の内容で使用される。導管手段は、圧力を受けて流体を推進させるポンプ手段と流体連通している。導管手段は、バルブ手段と流体連通しており、バルブ手段は少なくとも第1の位置および第2の位置を有する。第1の位置では、流体は導管手段内に流れ、第2の位置では、流体は導管手段内には流れない。この方法は、導管手段内で圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するステップを含んでいる。パラメータは、
(i)第2の位置へのバルブ手段の配置または予測配置に応じて、導管手段が前記1つまたは複数の作動圧力にある間に、低圧が得られるまで第1の斜面内の導管手段における選択パラメータを減少させる、および(ii)第1の位置をとるバルブ手段に応じて、または第1の位置をとるバルブを予期して、導管手段が低圧にある間に、第2の斜面で1つまたは複数の作動圧力が得られるまで選択パラメータを増加させるステップの少なくとも一方で制御される。
【0056】
したがって、本発明の実施形態は組成を制御すること、または流体混合物の完全性を維持することを対象としている。混合物を形成する化合物の圧縮性の差により、化合物が異なって流れる可能性がある。このような量および蓄積エネルギーの変化は、所望の組成とは違った混合物につながる可能性がある。本発明の実施形態は、流れを中断する前に導管、ポンプおよびバルブの蓄積エネルギーを次第に少なくする。本発明のこれらおよび他の特性は、図面を検討し、以下の詳細な説明の内容を検討すれば明らかになるだろう。
【0057】
対象技術の別の実施形態は、グラジエントを作り出す注入バルブと、注入バルブと流体連通している分析カラムと、グラジエントを分析カラムに向かって押し込むように注入バルブに連結されたポンプと、グラジエントを貯蔵するための注入バルブと分析カラムの間にある装置とを備えたLC機器を対象としている。
【0058】
本発明は、これに限らないが、現在知られているまたは後に開発される応用例に対するプロセス、装置、システム、デバイス、方法、またはコンピュータ読取可能媒体などの多くの方法で実施および利用することができることを理解すべきである。本明細書に開示したシステムのこれらおよび他の独自の特性は、以下の説明および添付の図面からより簡単に明らかになるだろう。
【発明を実施するための最良の形態】
【0059】
本発明は、ナノ流毛細管LC機器に対する送液解決法に関連する従来技術の問題の多くを克服する。本開示は、望ましくない混合が起こったときを認識し、このような混合を防ぐためのポンプ設定を利用することによって流体混合物の完全性を維持する。本開示はまた、LC機器のスループットを大きくするために、低圧および高い流れでのグラジエントの予備成形を示している。本明細書で開示するシステムの利点および他の特性は、本発明の代表的な実施形態を記載している図面と合わせて、特定の例示的な実施形態の以下の詳細な説明から当業者にはより簡単に明らかになるだろう。
【0060】
上流、下流、左、右、上および下などの本明細書の相対的な説明は全て、図面を参照したものであり、限定する意味合いのものではない。加えて、明確にするために、フィルタ、導管および相互接続部などの一般的なものは、関連する技術分野の当業者に分かるように、図面には特に含めなかった。そうでないと特定されない限り、図示した実施形態は、特定の実施形態の様々な詳細の例示的な特性を提供するものとして理解することができ、したがって、図示した特性、構成部品、モジュール、要素、サブシステム、および/または態様はあるいは、開示したシステムまたは方法から実質的に逸脱することなく、組み合わせる、相互連結する、配列する、分離する、置き換える、位置決めする、および/または再び配置することができる。
【0061】
リニアバルブ実施形態
図1Aから図2Bを参照すると、対象技術によるリニアバルブ127を使用する正流ナノスケールHPLC機器111が示されている。リニアバルブ127により、HPLC機器111が所望の作動圧力間で効率的に移行することが可能になる。HPLC機器は、最近機器が15,000ポンド毎平方インチ(PSI)での動作が可能である市場に導入されたように、5,000PSIを超える圧力で動作することができると考えられる。
【0062】
図1Aおよび図1Bを参照すると、機器111は、導管を通してそれぞれのリザーバ135a、135b内に入れられたそれぞれの溶媒A、Bを移動させるポンプ115a、115b(バイナリポンプ115と総称する)を有する。ポンプ115a、115bは、直列および並列ポンプ、タービンポンプ、シリンジポンプ、蠕動ポンプ、動電ポンプ、空気圧増幅器、および圧縮貯蔵装置を通して推進される流体を含んでいる。クロマトグラフィ応用例で使用される典型的なポンプは、ステッピングモータによって動力が与えられる直列ポンプである。これらのポンプ115a、115bは、いくつかの製造供給元から市販されている。マサチューセッツ州MilfordのWaters Corporation社は、ALLIANCE(商標)、ACQUITY(商標)および600(商標)モデルポンプという商標で適切なポンプを販売している。
【0063】
導管は、ポンプ115a、115bをリザーバ135a、135b、およびHPLC機器111の他の構成部品と相互連結させる。これらの溶媒は、クロマトグラフィ分離で使用されるあらゆる溶媒を含むことができる。典型的な溶媒は、1つの溶媒として水溶液(例えば、水)および有機溶媒(例えば、メタノール、アセトニトリルなど)を含むことができる。導管としては、幅広い範囲の圧力で流体流を運ぶための管、パイプ、毛細管およびマイクロ流体構造物などの構造物が挙げられる。低圧は大気圧であってもよいが、また大気圧より数百以上も上の値であってもよい。単純にするために、導管は図面中において普通は分類せず、構成部品を相互連結するラインとして示されている。
【0064】
普通、導管はステンレス鋼またはシリカであるが、他の材料を簡単に代用することもできる。これらの材料としては、例えばこれに限らないが、真鍮、アルミニウム、銅、チタン、セラミックおよびプラスチックが挙げられる。導管はあらゆる寸法を有することができるが、本発明の実施形態は、導管が小さな内径である特定の用途を有する。例えば、これに限らないが、導管またはその一部は0.005から0.010インチの直径のステンレス鋼配管である。導管の他の部分は、約25マイクロメータのシリカ毛細管である。一実施形態では、導管は、分析プロセスを行う場合は50ナノリットル/minから5マイクロリットル/min、および材料を試料から隔離する場合は4マイクロリットル/minから20ミクロリットル/minまでの概算範囲の流量を運ぶ。
【0065】
図示するように、ポンプ115a、115bからの流体の圧力および流れを、ポンプ115a用の圧力変換器131aおよび流量変換器133a、およびポンプ115b用の圧力変換器131bおよび流量変換器133bなどの圧力センサおよび流れセンサによって監視することができる。ポンプ115a、115bおよび変換器131a、131b、133a、133bは、制御手段125と信号通信している。信号通信は、点線によって示されている。ピストンタイプのポンプでは、制御手段125は、信号によりピストンを前または後に移動させるようにポンプ115a、115bに命令する。その結果、ポンプ115a、115bは圧力および/または流れを正確に制御するように閉ループフィードバックを使用する。
【0066】
制御手段125は、コンピュータ、演算処理ユニット、マイクロコントローラ、デジタル信号プロセッサ、サーバ、適切なファームウェアなどでプログラミングされたアナログ装置のことを言う。分析機器で使用されるコンピュータは、よく知られており、いくつかの普通の製造供給元から市販されている。制御手段125は、図3により圧力および流れを監視および制御するように、圧力センサまたは変換器131aおよび131bおよび流れセンサまたは変換器133aおよび133bと信号通信している。命令は、制御手段125のファームウェア、またはソフトウェア製造者によって提供されるツールキットによりオペレーティングソフト内にプログラミングされている。この性質のプログラミングは、当業者によるルーチンである。機器制御ソフトウェアは、EMPOWER(商標)またはMILLINNIUM(商標)の商標で、マサチューセッツ州MilfordのWaters Corporation社などのいくつかの製造供給元から市販されている。
【0067】
さらに図1Aおよび図1Bを参照すると、ポンプ115a、115bの出力は導管手段117aから117gを介してT字接続金具123内に流れる。実際、溶媒Aおよび溶媒Bは、混合物を形成するようにT字接続金具123で一緒になる。混合物はその後、傾斜手段として働くリニアバルブ127に入る。「傾斜手段」という用語は、時間の経過と共に次第に選択したパラメータを減少または増加させる手段のことを言う。斜面期間は、これらの変化が行われる期間である。斜面期間は普通、少なくとも5秒であるが、特定の応用例によってはるかに短いまたは長くてもよい。理想的な斜面期間は、流体容量、流量および圧力の大きさに基づいている。明確なものとして示しているが、機器111は別個のリニアバルブ127を備えていない傾斜手段を備えるように構成および動作させることができると考えられる。
【0068】
リニアバルブ127は選択的に、混合物を廃棄するように、または試料インジェクタバルブ119を捕捉カラム165および捕捉バルブ121で使用するために運ぶことができる。リニアバルブ127は、ある範囲の開口を有し、流れを廃棄または再利用するように分岐することによって導管内の圧力を増減させることが可能である。リニアバルブ127は、制御手段125と信号通信し、それにより開くまたは閉じる命令を受ける。リニアバルブ127は、当技術分野で知られており、オハイオ州CincinnatiのValco社などのいくつかの製造供給元から市販されている。
【0069】
リニアバルブ127は、流れを次第に制御することができることを特徴としている。したがって、装置111の圧力および流れは、図3に示す方法で制御することができる。リニアバルブ127は、制御手段125の特定の部分129によって制御されることが好ましい。リニアバルブ制御部分129は、図示するように、個別のコンピュータ、演算処理ユニット(CPU)、サーバ、または他の機能を制御する同じ制御手段125であってもよい。
【0070】
リニアバルブ127が、機器111内での前向きの流れを可能にするように設定されると、混合物は捕捉バルブ121と組み合わせて捕捉カラム165で使用するように、リニアバルブ127を通して試料インジェクタバルブ119に運ばれる。試料の成分が再生可能な方法で解放されるように、混合物の組成を制御することが望ましい。圧力および流れの追跡が、機器111の導管内の流体の完全性を維持する。
【0071】
普通、「試料インジェクタ」は、試料を保持する導管の一部をカラムの上流側で導管と流体連通するように使用されるバルブおよび導管の形のことを言う。「バルブ」という用語は、流れを制御する、抑制するまたは止める手段のことを言う。試料インジェクタは通常、マルチポートバルブ、および試料を保持する導管のループ(図示せず)を備えている。試料インジェクタバルブ119は、試料インジェクタバルブ119に圧力をかける圧力源151と流体連通している。この圧力は、制御手段125およびリニアバルブ127によって適合させることができる。圧力源151は、圧縮流体のあらゆるポンプまたは源を備えることができる。好ましくは、圧力源151は、当技術分野で知られておりいくつかの製造供給元から市販されているシリンジポンプ(図示せず)である。「圧力源」という用語は、あらゆるポンプ、シリンジまたは圧縮空気または流体タンクなどのことを言う。試料インジェクタ119は普通、試料を引き出すまたは吸引するシリンジを有する。
【0072】
試料インジェクタバルブ119および捕捉バルブ121はそれぞれ、少なくとも第1の位置および第2の位置を有する。第1の位置では、流体は流れ、第2の位置では流体は流れない。試料インジェクタバルブ119は、全体の分離モジュールの構成部品または一部としていくつかの製造供給元によって販売されている。1つの試料インジェクタバルブは、ACQUITY(商標)およびALLIANCE(商標)の商標で、マサチューセッツ州MilfordのWaters Corporation社によって分離モジュールの構成部分として販売されている。捕捉バルブは、Valcoを含むいくつかの製造供給元によって販売されている。試料注入バルブ119は、試料を導管のループ(図示せず)内に配置する。
【0073】
リニアバルブ127は、機器111が1つまたは複数の作動圧力にある間に、第2の位置への試料インジェクタバルブ119および捕捉バルブ121への配置または予測配置に応じて、導管手段117aから117g内の流れおよび圧力の群から選択した少なくとも1つのパラメータを制御する。捕捉バルブ121はまた、流れを廃棄するように、または溶媒溶液内で摂動することなく分析カラム2657および検出器169に選択的に案内することができる。したがって、捕捉カラム2655上で捕捉された関心のある化合物を効果的に分析することができる。
【0074】
一実施形態では、1つのポンプは、圧力に対して傾斜された制御のために前記第1のポンプ115aおよび第2のポンプ115bから選択され、もう一方は流れに対して傾斜された制御のために選択される。流れに対して傾斜された制御では、このようなポンプの流れは圧力に対して傾斜されたポンプの流れと一致するように制御されることが好ましい。圧力に対して傾斜されたポンプは、水溶性溶媒用であることが好ましい。また、流れに対して傾斜されたポンプは、有機溶媒用である。例えば、溶媒Aは水溶性溶媒である。ポンプ115aは、図3の斜面141aに従うように、制御手段125によって命令される。ポンプ115bは、斜面141b上の流れに対してポンプ115aを追跡する。制御手段125は、混合物組成のためにポンプ115aの送液に対応するようにポンプ115bの送液を調整することによって、溶媒Aおよび溶媒Bの正確な混合を維持するようにポンプ115bに命令する。加えて、ポンプ115bは、ポンプ115bの容量が変わるときに、導管手段117aから117gおよびポンプ115b内の溶媒Bによって示される圧縮または非圧縮容量を汲み上げる、または引き出す、または加える。
【0075】
次に図2を参照すると、図1Aおよび図1Bの機器111の動作のサイクルのための方法が示されている。最も一般的に、この方法は、大きな範囲の圧力および/または流れで導管内で運ばれる流体流の内容で使用されるものである。HPLCでは、この方法は捕捉および溶出の異なる処理ステップ中に必要である異なる状態にも関わらず、流体の完全性を維持することを対象としている。図3では、図2の方法の間の圧力プロファイル170および流れプロファイル172を示すタイミング図が、記した図2のステップに対応する領域で示されている。
【0076】
図2および図3を参照すると、ステップS1では、コントローラ125は機器111の現在の圧力および流体負荷条件を記録する。普通、現在の条件は前の溶出運転中に望ましいものである(例えば、高い圧力および低い流れ)。したがって、捕捉バルブ121は、流れが分析カラム2657に案内されるように設定される。溶出運転条件から捕捉条件まで移行するために(例えば、比較的低い圧力および高い流れ)、スロッシングおよび逆流により混合物の完全性を損なうことなく、機器流体内に蓄積される蓄積エネルギーを解放するために大きな注意を払わなければならない。またはさらに悪いことに、逆流が過剰になると、カラム2657などの機器構成部品に対する損傷が生じる可能性がある。
【0077】
図3はまた、現在の条件が、網目領域174によって示されたような機器始動に関連するものであってもよいことを示している。領域174は、ステップS1の初期部分S1a中の始動条件では、流れはゼロであるが、分析流れまで傾斜されていることを示している。すなわち、網目領域174は、機器111が初期のグラジエント流れおよび組成まで傾斜することができるまでの、始動条件からの代替のより低い流れプロファイル172を示している。
【0078】
部分S1a中に、機器111はまた有利には、試料を注入バルブ119のループ内に装填することが好ましい。試料は、注入バルブ19を負荷に設定し、圧力源51を使用することによって装填される。さらに、機器111は次の運転のための設定パラメータをダウンロードする。これらの設定パラメータが、制御手段125に提供される。
【0079】
ステップS1の残りの部分S1bの間、分析流れに到達し、したがって流れプロファイルは2つの代替方法の間で一貫している。さらに、機器111は次の運転のために現在のパラメータを記憶する。圧力および流体負荷Rのこれらの現在のパラメータは、ステップS7に関して以下に記載するように、制御手段125に提供される。
【0080】
ステップS2では、機器111は捕捉条件を可能にするように減圧斜面を開始する。制御手段125は、圧力に対して第1の斜面41a内の圧力を減らすようにリニアバルブ127に命令する。同時に、制御手段125は、好ましくはフィードフォワード補償(例えば、ハイブリッド減圧斜面141a)で、ポンプ115aをゼロ圧力に、ポンプ115bをゼロ流になるように命令する。「フィードフォワード補償」という用語は普通、以下により詳細に示すように、開ループ補償を意味する。ステップS2は、約30秒間続くことが好ましい。
【0081】
ステップS3では、機器111は低い圧力および流れ条件143aである。この低い圧力143aは大気圧であってもよいが、図示するように、低い圧力143aはまた、試料インジェクタバルブ119内の圧力に対応するように大気より十分上であってもよい。この斜面141aを達成するために、リニアバルブ127は廃棄するように通気し、制御手段125はゼロ流に設定された両方のポンプ115a、115bを動作させる。実際、圧縮流体中に蓄積されたエネルギーは、逆流およびスロッシングなしで、または少なくとも最小限に抑えて解放される。ポンプ115a、115bは同期される。ステップS3は約5分続くことが好ましい。
【0082】
ステップS4では、機器111は、捕捉位置に捕捉バルブ121を案内することによって捕捉プロセスに対して準備する、すなわち、捕捉バルブ121は流れを廃棄するように案内する。両方のポンプ115a、115bは、それぞれ斜面145a、145bに示すように、比較的低い圧力および高い流れの所望の捕捉条件に対して傾斜する。斜面145a、145bを達成するため、制御手段125は導管内の圧力を作動圧力147aおよび流れ147bまで大きくするように、リニアバルブ127に命令する。
【0083】
各ポンプ115a、115bによって発生した流れによって、T字部123から出る混合物を制御することができる。制御手段125はまた、試料をループから捕捉カラム165まで移動させるために、試料の注入を開始するように注入バルブ119を準備する。ステップS4は、約30秒続くことが好ましい。
【0084】
ステップS5では、機器111は混合物の所望の組成で、捕捉圧力147aおよび捕捉流れ147bで平衡に到達する。機器111は、試料の注入を開始する前に完全平衡を可能にするように、約1分間遅延することが好ましい。平衡に到達する際に、注入バルブ119を注入位置に設定することによって、試料をループから捕捉カラム165まで移動させる。比較的高いほうの流れ147bにより、試料を移動させる時間は早く、約数分間であってもよい。ユーザは、試料が効果的に捕捉カラム165に移動されることを保証するように、捕捉期間を選択する。一実施形態では、ステップS5は約5分間続く。
【0085】
ステップS6では、捕捉動作が完了した後に、ハイブリッド減圧が起こる。溶出運転中より少ないが、機器111内に蓄積されたかなりのエネルギーが、導管内の混合物の完全性を損なうことなく効率的および効果的に分散される必要がある。ハイブリッド減圧は、ポンプ115bの流れを好ましくはフィードフォワードでゼロに設定しながら、ポンプ115aの圧力をゼロに設定することを含んでいる。その結果、圧力は斜面149aに示すようにほぼ大気圧まで減少し、流れは斜面149bに示すようにゼロまで移動する。
【0086】
また、これらの斜面149a、149bを達成するために、制御手段125はリニアバルブ127を大気まで次第に通気するように命令する。注入バルブ119は、負荷位置に設定されている、すなわち、試料を保持するためのループは、分散およびその後の再圧縮が必要であるオーバーヘッドの量を少なくするように流体経路から取り除かれる。捕捉バルブ121は、廃棄するように閉鎖し、流れを分析カラム2657に案内する。ステップS6の最後で最小流れおよび圧力条件に到達する際に、機器111は中の流体の完全性を維持しながら、流体流などを再び案内するように設定を調節することができる。ステップS6は、約30秒続くことが好ましい。
【0087】
ステップS7では、機器111は、流体流を作動圧力まで圧縮し戻すのに必要な比較的大量の蓄積エネルギーにより、望ましくない長い再圧縮時間を招くことなく、溶出運転を達成するようにハイブリッド再圧縮を行う。ハイブリッド再圧縮の開始の前に、制御手段125はステップS1bで記憶された圧力および流体負荷パラメータを取得する。
【0088】
圧力および流れが前に使用したのと同じ場合、少なくとも最初は、機器111は前の値に戻ろうとする。圧力および流れが異なる場合、機器111は記憶した流体抵抗Rの値に基づき新しい設定を推定する。例えば、ステップS1bのパラメータが0.350ミクロリットル/minの設定流Qsで9,000PSIのシステム圧力Psである場合、約25,700psi/μL/minの流体抵抗Rs=Ps/Qsが算出され、メモリ内に記憶される。機器11は、新しい設定を測定するのに以下の式を使用する:
Pnew=Qnew*Rs
【0089】
新しい設定を得るために、制御手段125は、導管内の圧力を斜面161aに示すような作動圧力に、また斜面161bに示すような作動流れまで増加させるようにリニアバルブ127に命令する。同時に、制御手段125は閉ループフィードバック制御でポンプ115a、115bを運転させる。ポンプ115a、115bを高い圧力に設定し、短い間隔の間に圧力を満足させるように流れを増加することを可能にすることによって、設定流れおよび圧力パラメータは混合物の完全性を損なうことなく極めて迅速に達成される。一実施形態では、ステップS7は約30秒、または好ましくはそれより短く続く。
【0090】
斜面141a、141b、145a、145b、149a、149b、161aおよび161bは直線であるように示されているが、このような斜面は、時間の経過に従った圧力の変化を示す傾斜が管理される限りは非直線であってもよい。好ましい傾斜は、約10,000ポンド毎平方インチ(psi)毎秒未満である。傾斜はより好ましくは10から1,000psi毎秒、より好ましくは、100から500psi毎秒の範囲である。
【0091】
ステップS8では、機器111が流れおよび圧力に対する所望の設定に到達すると、流れは平らな領域163bに示すように、溶出運転中に定常状態になる。これに対して、圧力は異なる領域163aによって示すように変動する可能性がある。ステップS8の間、試料は分析のために分析カラム167まで運ばれる。
【0092】
フィードフォワード実施形態
次に図4Aから図10を参照すると、フィードフォワードを使用する別のHPLC機器211が、様々な図で言及され示されている。関連技術業界の当業者に分かるように、機器211は上に記載した機器111と同様の原理を利用している。したがって、「1」という数字の代わりに「2」という数字を前に置いた同様の参照数字が、可能な場合は同様の要素を示すために使用されている。機器111と比べて機器211の基本的な違いは、リニアバルブ127がないことである。
【0093】
図4Aおよび図4Bを参照すると、対象技術により開ループフィードフォワード補償を使用する別の正流ナノスケールHPLC機器211が示されている。機器211は、グループ化され、集合的にバイナリグラジエントポンプ220と呼ばれる複数の部品を備えたいくらか略図的な形で示されている。バイナリグラジエントポンプ220は、分析スケールクロマトグラフィで使用するために設計され、制御手段225によって行われる閉ループフィードバック制御と合わせて使用される、インライン流量変換器233A、233Bを組み込むことによってナノ流LC応用例に対する正確なグラジエントを送液するように変更される。一実施形態では、流量変換器233A、233Bは風速計式の流量変換器である。
【0094】
ポンプ215Aは、2つの移動相溶媒(例えば、水性)の一方をリザーバ供給部235Aから混合T字部223まで調達する独立高圧ポンプを示す。ポンプ235Aは、円滑な流れ送液のための2つの往復動ポンプからなっていてもよい。ポンプ235Aの出口での溶媒流れは、インライン圧力変換器231Aおよびインラインナノ流変換器233Aを通して案内される。圧力変換器231Aは、機器作動圧力の測定値を提供し、流量変換器233Aは混合T字部223内への溶媒Aの流体流の直接ナノ流測定値を提供する。閉ループ制御により、制御手段225は、ポンプ215Aの高圧シールおよび逆止弁により、流量変換器233Aから上流側に大きな寄生流れ漏洩のある状態で正確な流れ送液を維持することが可能である。同様に、ポンプ215Bは、相補的な移動相溶媒(例えば、有機)をリザーバ供給部235Bから混合T字部223まで調達する対応する圧力変換器231Bおよび流量変換器233Bを有する同様な独立高圧ポンプを示す。
【0095】
制御手段225は、混合T字部223内への各ポンプ215A、215Bの送液流を調節することによって、機器211に対する所望のユーザ設定バルク流、および2つの溶媒の組成混合比を確立する。各ポンプの溶媒流内に圧力および流量変換器231A、231B、233A、233B両方を有することによって、機器211は2つの基本的な制御動作モードで優れた適応性を提供する。
【0096】
導管240A、240Bは、2つのポンプ215Aと215Bの間で受動流体分離を行って、混合T字部223にわたって2つの流れ制御ループの固有の相互作用を安定化させるように、例えば短い長さの毛細配管などの直列のリストリクタである。リストリクタまたは導管240A、240Bは、変換器233A、233BとT字部223の間の容量を最小限に抑えるように、流量変換器233A、233Bの下流側に意図的に配置されている。
【0097】
バイナリグラジエントポンプ220からの溶媒流は、構成によって、1つまたは複数の分離カラム265、267に案内される、流体流内に試料リザーバから1つまたは複数の試料アナライトを案内する試料インジェクタバルブ219まで導管(例えば、短い毛細管)を介して運ばれる。分析カラム267からの分離したアナライトは、質量分析計、UV検出器、および/またはその他などの検出器269に案内される。
【0098】
図4Bに示すように、機器211は、捕捉カラム265、捕捉バルブ221、および分析カラム267を備えた、フォワードフラッシュモードで動作する、単純捕捉方式を特徴とする。バイナリグラジエントポンプ220は、以下に記載するように、試料装填/捕捉およびグラジエント送液の動作の両方を行う。図4Bが「フォワードフラッシュ」方式を示しているが、対象技術は、捕捉方式の業界の当業者に知られているように、「リバースフラッシュ」などの他の捕捉方法に適用可能である。示された捕捉動作の間、バイナリグラジエントポンプ220は、捕捉バルブ221が廃棄するように開かれた状態で比較的高い流量(例えば、5から15μL/min)で固定溶媒組成(例えば、極めて高い%A(水性)および、極めて低い%B(有機))を与える。分析カラム267の極めて高い流体抑制の結果、溶媒流は廃棄するように案内される。試料アナライトは捕捉カラム265の上に装填され、分析カラム267に望ましくないまたは有害である溶出成分(例えば、緩衝液、塩など)が流されて廃棄される。捕捉が終了すると、バイナリグラジエントポンプ220は捕捉流を止め、分析分離のために機器211を再構成する。捕捉バルブ221が閉じ、それによって流体流を分析カラム267に案内する。バイナリグラジエントポンプ220はその後、予めプログラミングされたナノ流量および時間プログラミングされた溶媒組成プロファイルでのグラジエント運転を開始する。図4Aに示すように、「設定流」、溶媒Aの割合および溶媒Bの割合が、ユーザによって制御手段225内に入力される。
【0099】
別の実施形態では、機器211は捕捉カラム265なしで直接注入モードで動作する。そのモードでは、短い毛細管(図示せず)は捕捉カラム265に換わり、捕捉バルブ221は閉じられたままであり、分析カラム267に流体流を案内する。試料アナライトの注入は、グラジエント運転の開始中に起こる。
【0100】
次に図5を参照すると、より詳細な制御手段225のいくらか略図的な図は、流れ制御方式を例示するために示されている。上に記したように、従来技術のシステムは、5,000psiより大きいような極めて高いシステム圧力での動作中に、システムへの流れが開始または停止した場合は、捕捉または直接注入の動作間の溶媒組成制御の損失の問題があった。制御手段225は、それぞれ各溶媒ポンプ235A、235B用の2つの流れコントローラ250A、250Bにより、機器211へのユーザ設定バルク流(設定流れ)およびユーザ設定組成溶媒比(%Aおよび%B)を確立する。設定流れ、溶媒Aの割合、および溶媒Bの割合は、合計接合部254A、254Bに沿ってそれぞれ各経路に入力される。
【0101】
各流れコントローラ250A、250Bは、PIDフィードバックコントローラとして実施され、基本的にサーボループとして挙動して、機器の流れ変化または溶媒組成の変化のいずれかに反応し、その変化のいずれかは新しい流れ設定点として運ばれる。流れコントローラ250A、250Bは、現在の流れ設定点または基準入力(Qra、Qrb)を測定した流れ(Qa、Qb)と比較して、T字部223に入力し、ステッパモータ制御ピストンポンプの場合、基準流れ(Qr)が満たされるように必要なポンプ容量流量(Qpa、Qpb)を機器211内に推進させる、適当なモータ速度信号を作り出す。同様に、他の汲み上げ方式では、適当な信号Qpa、QpbがQrを満たすように発生される。
【0102】
設定流れ変化は、傾斜手段252A、252Bによって示される、直線傾斜関数により流れコントローラ250A、250Bに運ばれる。各ポンプ215A、215Bでは、傾斜手段252A、252Bは、2つの流れコントローラ250Aと250Bの間に優れたサーボ追跡を保証する、傾斜間隔Trの時間に対して直線関数として増加的に、それぞれの流れコントローラ250A、250Bの基準設定点(Qr)まで新しい流れ設定点を通過させる。普通、Trに対する適当な値は、流量変換器233A、233Bの時定数の約5倍である。好ましい機器211では、流量変換器233A、233Bの時定数は約5秒であり、したがって30秒の傾斜時間間隔Trが好ましい。傾斜手段252A、252Bは、それぞれの流れコントローラの設定点の前の履歴を維持し、各新しいユーザ設定値では、制御手段225は、方向、合計変化値デルタ流(新しい設定流れ−現在の設定流れに等しい)、および斜面速度Rp(デルタ流/Trと等しい)を算出して、流れコントローラ250A、250Bの基準入力(Qr)に増分更新を管理する。
【0103】
図5から分かるように、各傾斜手段252、流れコントローラ250、変換器231、233およびポンプ215は、流れ制御サーボループを形成する。組成の比較的小さな変化(すなわち、2つの流れ制御サーボループ間の相補的な流れ変化)、または機器211に対するバルク流変化(すなわち、流量変換器の帯域幅内での変化)では、2つの流れ制御サーボループは、HPLCクロマトグラフィを行うのに十分な優れた組成制御、したがって流れ追跡を維持することが可能である。これは、プログラミングされたグラジエント運転中にこのような場合が当てはまる。
【0104】
しかし、大きな背圧変化に伴なって極めて大きな流れの変化を行う場合、2つの流れコントローラサーボループの追跡能力が壊れ、組成制御が失われて、機器211の流体流の組成誤差、およびクロマトグラフィの損失につながる。例えば、機器211内の流れが極めて抑止的な毛細管カラムで停止または開始されると、組成誤差が生じる可能性がある。この問題は、捕捉段階(例えば、高い流れおよび穏やかな圧力)の終わりから、グラジエント送液が始まる開始分析流れ条件(例えば、ナノ流および極めて高い圧力)へ機器211のバルク流を移行する場合、捕捉中に特に問題である。
【0105】
傾斜手段252A、252Bのみが、5,000psiの作動圧力などのより低い作動圧力でかなり効果的に流れコントローラに対する大きな設定点変化を制限することができる。しかし、10,000psiなどのより高い作動圧力が適切に補償されない場合、はるかに長い毛細管カラムでの動作を可能にすることにより、流れコントローラの深刻な誤追跡により、少なくとも組成制御の部分的な損失が生じる。
【0106】
誤追跡の原因は、機器カラム265、267への流れ送液のナノスケールに対する、ポンプ215A、215Bの極めて大きなシリンダ容量によるものである。これらのLC応用例で使用される移動相溶媒は、上記作動圧力で比較的圧縮可能であるので、定常流れを混合T字部223内で達成する前に、これらの流体の捕捉容量はかなりのエネルギー蓄積が必要である。このエネルギー蓄積は、機器流体の圧縮量変化として表れ、溶媒圧縮性および捕捉容量に正比例し、作動圧力の二乗に比例する。蓄積されたエネルギーは、各ポンプ215によって追加の「充填(charging)」流れとして供給され、圧力は変化し、混合T字部223内で制御されている流れよりはるかに大きい。溶媒A、Bは普通、かなり異なる流体圧縮性を有するので、2つのそれぞれのポンプ215Aと215Bの間の効果的な充填流れは、混合T字部223にわたる容量変化と同様に、その圧縮性の比だけ異なる。したがって、流れコントローラ250A、250Bが混合T字部223での充填流れおよび容量のかなりの不均衡を管理することができないことにより、組成制御の損失が作り出される。
【0107】
流体モデル
組成制御の損失の力学、および流れコントローラ250A、250Bの制限を機器がどのように補償するかを示すために、流体の単純分析モデルを示す。流体の圧縮性は、圧力変化の反応としての流体の相対容量変化として定義され、以下のように数学的に示される。
【数1】
式中、Vはシステムの容量であり、偏導関数は圧力の変化に対する容量の変化を示す。熱力学の用語では、圧縮性は偏微分がとられる条件またはプロセスによって定義されている(例えば、断熱/一定エントロピーまたは等温/一定温度)。
【0108】
圧力の変化に対する容量の微分変化はまた、流体容量として示され、これはエネルギーを蓄積するための流体の容量である。したがって、流体容量は以下の通りである:
C=β・Vo
式中、βは流体圧縮性であり、Voはシステムの捕捉容量である。電気回路からの単純オーム関係を使用して、流体抵抗は以下のように示される:
R=ΔP/Q
式中、ΔPは抑制要素にわたる圧力低下であり、Qは要素を通る流量である。抵抗Rは基本的に、流体要素の長さおよびそこを通って流れる流体の粘度に比例している。
【0109】
電気回路と同様の容量および抵抗の基本一括パラメータ要素を使用して、機器211の等価流体回路が図6に示されている。同様に、電流「I」はμL/minの単位での容量流れ「Q」を示している。電圧は、psiで圧力を示し、容量「C」は流体の流体エネルギー貯蔵を示し、μL/psiの単位で示されている。抵抗「R」は、psi/μL/minの単位で流れに対する流体制限を示している。
【0110】
図6の流体モデルを図5の流れ制御サーボループに関連させて、IpaおよびIpbは、それぞれ機器211内に両方のポンプAおよびBによって運ばれる容量流を示す2つの従属電流または流源である。流れIpa、Ipbは、ポンプモータアクチュエータの命令速度に正比例する。PTaおよびPTbは、それぞれ2つのインライン圧力変換器231A、231Bを示している。圧力変換器231A、231Bは、ポンプ215A、215Bでそれぞれノード圧力PaおよびPbを測定する。同様に、FTaおよびFTbはそれぞれ、2つのインライン流量変換器233A、233Bを示している。流量変換器233A、233Bは、混合T字部223へのそれぞれ2つの制御流れIaおよびIbを測定する。
【0111】
混合T字部223での2つの流れIaおよびIbの合計は、混合T字部223からの流れIsにつながる。機器211の有効負荷は、基本的に流体回路の終わりでのカラム265、267の流体抵抗である、抵抗Rsによって示され、Csは混合T字部223の下流側での機器の一括流体容量を示している。容量Csは基本的に、インジェクタバルブ219の試料ループの量、および捕捉カラム265の量からなる。容量Csは、ポンプ容量Ca、Cbよりはるかに小さい。
【0112】
RaおよびRbは、それぞれ2つの毛細管リストリクタ240A、240Bの流体抵抗を示している。必要ではないが、抵抗Ra、Rbは、それぞれの長さを溶媒A、Bの粘度と比例させることによってほぼ等しくなる。抵抗Ra、Rbは、毛細管カラム265、267の組み合わせた抵抗Rsに対して極めて小さい。例えば、抵抗Ra、Rbは約40psi/μL/minであり、75μm内径×150mm×1.7μmの粒子毛細管カラムの抵抗Rsは水に対して約25,000psi/μL/minである。
【0113】
Psは、カラム265、267内へのシステム流Is、または機器抵抗Rsから得られるシステム背圧である。毛細管リストリクタはRsよりはるかに小さいので、測定したポンプ圧力Pa、Pbはそれぞれ、機器背圧Psのかなりの割合である。CaおよびCbは、それぞれ各ポンプ215A、215Bの集合流体容量を示し、その入口バルブ(または、逆止バルブ、図示せず)と出口ポートの間の変位ストローク量と内部デッドボリュームを含む最終送液ポンプシリンダ、圧力変換器、およびそれぞれ流量変換器231、233を含まないがそこまでの連結導管全ての捕捉容量を含んでいる。一実施形態では、送液ポンプシリンダおよび流量変換器までの相互連結導管の捕捉容量は、約160μLである。水性ポンプ215Aでは、水に対する流体圧縮定数βは3.12e−6/psiである。したがって、Aポンプの流体容量はほぼ以下の通りである:
Ca=3.12e−6/psi*160μL=0.0005μL/psi
有機ポンプ215Bでは、アセトニトリル(ACN)に対する流体圧縮定数βは7.34e−6/psiであり、水の2.35倍の圧縮性がある。したがって、Bポンプの流体容量はほぼ以下の通りである:
Cb=7.34e−6/psi*160μL=0.00118μL/psi
【0114】
IcaおよびIcbは、ノード圧力Pa、Pbが変わる場合の、それぞれのポンプ流体容量Ca、Cb内へのまたはそこからの圧縮性「充填」または「放出(discharging)」流を示している。電気的等価を使用して、圧縮性流れは以下のように示される:
【数2】
フィードバック制御方式の制限を考慮するために、30秒の傾斜間隔Trにわたって流れがゼロからグラジエントの初期条件まで傾斜する以下のシナリオであると考える。これは、以下の捕捉または直接注入のいずれかの場合である。傾斜間隔中、組成は極めて高い水性または有機混合比で(例えば、97%A、3%B)一定に保持される。上記カラムでの350nL/minの目標流量では、約9,000psiの定常システム圧力Psが達成される。傾斜方法で、機器圧力Psはまたゼロから9,000psiまで直線的に傾斜すべきである。システムを9,000psiに圧縮するのに必要であるAポンプに対する流体容量の変化は、以下の通りである:
ΔVa=Ca・ΔP=0.0005μL/psi*9,000psi=4.5μL
B溶媒の圧縮性はA溶媒の2.35倍であるので、Bポンプの対応する容量変化は約10.6μLである。
【0115】
例えば、30秒の傾斜間隔にわたりシステム圧力を9,000psiまで傾斜させるために、ポンプ215Aは以下の持続平均「充填」流れIcaを供給しなければならない:
【数3】
この間、関連する制御流れIaをゼロから0.97*350nL/minすなわち約340nL/minの目標値まで傾斜させる。同様に、ポンプ215Bは以下の持続平均「充填」流れIcbを供給しなければならない:
【数4】
この間、関連する制御流れIbをゼロから0.03*350nL/min=11nL/minの目標値まで傾斜させる。
【0116】
T字部での出口の組成制御を維持する場合、ポンプヘッドでの圧縮または充填流れは、組成比とは関係なく、2つの溶媒圧縮因数の正確な比率で維持しなければならない。この要件が満たされない場合、制御入口流れIa、Ibの適切な混合比を維持するのに必要な混合T字部223の入口ポート(図示せず)にわたるノード圧力Pa、Pbの繊細な微分追跡は、流れコントローラ250A、250Bによっては維持されない。微分圧力混乱が十分深刻である場合、ノード圧力Pa、Pbの一方が機器圧力Psの下まで低下して、混合T字部223のその行程または側部に対して流れ逆転を引き起こす。この状況では、より高いノード圧力PaまたはPbでの支配ポンプが、混合T字部223の出口(図示せず)で溶媒混合物を飽和させ、場合によっては、他のポンプの流量変換器233Aまたは233Bを汚染する。したがって、流体回路の構造および容量スケールにより、混合T字部にわたる圧力差は、T字部内への2つの制御流れと比べて、充填流れにはるかに強く依存している。これにより、フィードバックコントローラに対する極めて悪い状態の問題が起こり、有機ポンプに対してほぼ2,000から1である、はるかに大きい制御されていない充填流れと比べて、混合T字部内へのむしろ小さな入口流れ中の誤差に対して反応することしかできない。
【0117】
例えば、傾斜動作の始めに、各ポンプヘッドの容量が充填を開始するまで、混合T字部223内への測定可能な流れがほとんどない。流れコントローラの比例動作は、100μL/minの高い限界まで各ポンプモータ(図示せず)の命令信号速度を仕切り、これは水性ポンプ215Aの平均充填流れの約10倍であるが、有機ポンプ215Bの平均充填流れのかろうじて5倍である。したがって、両方のポンプ215A、215Bが開ループに留まっている持続時間は異なり、水性ポンプ215Aで約2.7秒、有機ポンプ215Bで約6.3秒である。明らかに、両方のポンプ215A、215Bが開ループであるが、同じ流量で流れている、少なくとも3秒の重複間隔がある。したがって、フィードバックコントローラは、両方のポンプヘッドの放出状態によって生じる極めて高い充填流れの知識または直接測定がなく、組成制御を維持することが不可能である。この問題は、システム流れが普通の終端グラジエント状態からゼロに傾斜される場合に相補的な挙動を有する。この場合、圧縮容量が拡大する場合に、各ポンプ215A、215Bの蓄積エネルギーがシステム211内に放出される。有機ポンプ215Bはより多くの容量またはエネルギー蓄積を有するので、水性ポンプ215Bの流体は有機ポンプ215Aの流体より多く広がって、有機ポンプ215Bは出口流内に望ましくなく「ゲップ」をし、他の変換器233A内に逆流させる。これは、システム211が、次の運転のために直接注入または捕捉動作のいずれかを開始するように前の運転から移行する場合である。
【0118】
図7を参照すると、対象技術によるフィードフォワード補償の使用を特に例示するように、図4Aおよび図4Bの機器311のいくらかより詳細なバージョンが示されている。当業者が分かるように、機器311は上に記載した機器と同様の原理を利用している。したがって、可能な限り同様の要素を示すために、「3」という数字を前に置いた同様の参照番号が使用されている。機器111、211と比べて、機器311の基本的な追加は、図6の流体モデルで示すように、信号加算および乗算接合部および等価の電流値を含めることである。
【0119】
全体的に、修正フィードフォワード制御方式は、バルクエネルギー蓄積の分離、すなわち流れ傾斜動作中の流れ(および、組成)のフィードバック制御からのポンプヘッドのバルク流体圧縮性に基づいている。フィードフォワード方式は、閉ループ流れコントローラ250A、250Bとは別に、バルク捕捉ヘッド容量を圧縮および減圧するのに必要な大きな背圧変化を管理する。フィードフォワード方式は、ポンププランジャ(図示せず)のタンデム移動に制御法則を適用し、それによってポンプヘッド(図示せず)の圧縮エネルギーの蓄積または解放が、混合T字部23への入口ポートで適切な組成流れQaおよびQbを保持するように制御されている。フィードフォワード制御動作は、混合T字部323にわたる液体のスロッシングが組成の許容誤差範囲内にあるように、2つのノード圧力PaおよびPbを効果的に均衡させる。
【0120】
フィードバックコントローラの観点から、フィードフォワード方式は、流れ斜面中の流れコントローラに対するバルク容量負荷または障害を取り除いて、効果的にポンプヘッドの捕捉容量をほとんど見えなくする。制御流れに対する基本的な負荷障害は、デルタP、または推進ポンプヘッドからのノード圧力の変化である。したがって、各流れコントローラに示される障害流れQdistはデルタPに比例している。このデルタPは、大きなバルク流れ変化により大きな圧力変化が起こる場合に、捕捉ヘッド容量内におよびそこから流れる極めて大きな圧縮または減圧流れIcを生じさせる。フィードフォワードループは、混合T字部323内への制御流れとは別に、各ポンプ315A、315Bによって供給または吸収しなければならない必要な充填または放出流れIcを効果的に推定し、それによってフィードバックコントローラは、システム圧力がシステム311へのバルク流れの変化のみに応じて傾斜する間に、正確な組成混合比を維持することができる。再び図6を参照すると、普通、フィードフォワード制御法則は、単に以下のように圧力の変化に応じたヘッド容量の充填または放出流れである:
Qfeedforward=Ic=C dp/dt
また、圧力変化は推定または測定障害関数である。
【0121】
次に図7を参照すると、傾斜手段352は所望のバルク流れ傾斜関数を制御方法に与える。Aポンプ315Aでは、制御手段による前の運転から記憶されたシステム抵抗Rsの測定を使用して、予想システム圧力斜面Paの推定値が乗算器254A1で導き出される。フィードフォワード方式は、Paの誘導動作255をとることによって、圧力障害信号を算出する。フィードフォワード制御法則Qcaは、Paの導関数を259でポンプAの測定容量Caで乗算することによって算出される。フィードフォワード修正は、加算接合部263で流れフォードバックコントローラ350Aから命令信号内に加算される。同様に、Bポンプ315Bは動作254A4、257、261および265を介してそのフィードフォワード修正信号を導き出す。実際の応用例では、フィードフォワード計算は、図7に示す制御方式で、圧力信号の実際の導関数をとる必要はない。代わりに、傾斜手段352(段落0123参照)によって算出される斜面速度Rpは、圧力斜面信号の導関数であり、フィードフォワード信号Qcaを作り出すように容量Caによって単に乗算されるだけである。
【0122】
別の実施形態では、障害信号Paのフィードフォワード推定値は、圧力変換器331Aによって与えられる実際の測定値に置き換えることができる。しかし、雑音が常に信号に存在しており、信号の導関数をとるのに適当なフィルタリング手段を提供しなければならない。
【0123】
次に再び図7を参照すると、対象技術によるフィードフォワード補償の応用例を特に示すように、図4Aおよび図4Bの機器のいくらかより詳細なバージョンが示されている。
【0124】
フィードフォワードの別の改良
図8は、対象技術による改良フィードフォワード信号の特定の成分を特に例示するために示された、さらに詳細な別のバージョンのLC機器である。図9は、図8により負荷にエネルギーまたは電荷Csを与えるように、システムまたは充填流れIsを有するLC機器と等価の別の電気回路である。簡単にするために、図8は混合T字部423内へのポンプ415Aの流体流または行程のみを示しており、ここに示す流体改良の全ての説明はまた、ポンプ415Bの行程に混合T字部423にわたって対称的に当てはまる。
【0125】
フィードフォワード制御の第1の改良は、送液ストローク中のポンプ415Aの変化容量および得られる容量Caを考慮する必要がある。ストロークがポンプ415Aの下死点から上死点まで横切ると、有効ポンプ容量Caは、ストロークおよび固定捕捉容量の合計に対するストローク容量の比に比例する正味変化と共に変わる。ストローク容量がかなりある可能性があるので、Caは図9に示すように時間変化パラメータであり、フィードフォワード制御中に修正することができる。プランジャ移動位置を監視し、溶媒圧縮因数βによって乗算する前に、様々な捕捉容量Voに適当な変更を行うことによって、適切な修正が行われる。プランジャ位置は、直接命令モータ位置を読み取ることによって、または提供されるモータシャフトエンコーダ、リニア位置表示器などを測定することによってのいずれかで分かる。Caの時間変化値に対する修正は、乗算器459の前のCaに対するストローク容量修正として図8に示されている。
【0126】
フィードフォワード制御方式の第2の改良は、インライン流量変換器の捕捉流体容量、および関連する望ましくないエネルギー蓄積効果を考慮する必要がある。一実施形態では、各流量変換器433A、433Bはちょうど2μLの捕捉容量を有する円筒形管(図示せず)から構成されている。測定要素は、管の長さに沿って対称的に配置されており、中間点の上流側および下流側で均等に捕捉容量を大まかに分割し、これは流れ測定が行われる仮想ノードである。これらの捕捉容量要素によって生じるエネルギー蓄積効果は、図8の2つの分路容量CpreFTおよびCpostFTとして示すことができ、変換器433Aの両側にある。
【0127】
図9は、流量変換器の両側にある、上流側および下流側容量CpreFTおよびCpostFTを組み込む。図9では、FTaは、物理装置の両側の容量の間で中心に置かれるほとんど小さい点で測定流れ信号を作り出す理想的な仮想変換器を示す。変換器容量CpreFTおよびCpostは、ノードPaでのポンプ415A圧力が変化する場合に、対応する分路電流IcprおよびIcpoを生じる。フィードフォワード制御方法に行われる改良は、図9に示すようにこれらの追加の分路電流が、乗算器471、473に入り、加算接合部475、477内に通過することとなる。これらのフィードフォワード流れは、乗算器454A1の出力で命令圧力斜面を満たすのに必要な変換器充填電流を補償する。実用的な目的で、上流側変換器容量CpreFTは、はるかに大きいポンプシリンダ容量または容量Caに含まれ、それによって測定流れ上の分路電流Icprの効果は無視することができる。したがって、変換器を通る流れは実質的に、流量変換器433Aの下流側容量により、混合T字部423内へのポンプ415Aの流れ、および充填流れIcpoからなる。実際の応用例では、充填流れIcpoを生じる容量CpostFTは、毛細管配管を使用することによって最小限に抑えることができる、直列リストリクタ440Aのあらゆる捕捉容量による。このモデルでは、流量変換器433Aは、ポンプ415Aの圧力Paが変化する場合に、所望の制御流れIatの測定誤差を作り出す。誤差項は、ポスト変換器充填流れIcpoである。
【0128】
第3の改良は、流れコントローラ450Aの設定点にフィードフォワード算出値Icpoを加算する、加算接合部479によって図8に示すように、フィードバックコントローラ450Aで流量変換器測定流れ誤差を修正することによって制御方法に行われる。修正が達成される方法を理解するために、流れコントローラ450Aは、(Qra’−Qa)として示される、内部誤差検出器信号、設定点マイナス測定値に対応する。設定点項Qra’は、実際の駆動設定点Qra、および流れ測定値Icpoの算出誤差項である。しかし、流量変換器測定は、IatおよびIcpoの合計に対応する。したがって、流れ誤差項は、流れコントローラの誤差信号にわたってキャンセルされて、所望の誤差信号(Qra−Qat)を作り出す。
【0129】
図10を参照すると、対象技術によるフィードフォワード信号を使用したハイブリッド方法を特に例示するために、さらに別の詳細なバージョンのLC機器が示されている。図10に示す制御方法はまた、ハイブリッド圧力および流れ制御方法またはハイブリッド方法と呼ぶこともできる。ハイブリッド方法は、混合T字部523の下流側の圧縮要素に対処する。一実施形態では、下流側要素はユーザ構成可能構成部品を備えており、できれば実用的でない制御方法によって特徴付ける。このような構成部品は、様々な容量サイズで与えられる、インジェクタ試料ループおよび捕捉カラムを備えている。これらの構成部品は、出口T字部523に取り付けられた一括システム容量を示しており、分析カラム(図示せず)の極めて制限的なシステム抵抗Rsと並列にある、Csとして図6および図8の流体モデルに示されている。上で記したように、フィードフォワード補償を使用することにより、フィードバック専用制御方式を苦しめる混合T字部523までの組成制御問題を解決することができる。しかし、試料ループおよび/または捕捉カラムなどの大容量構成部品が混合T字部523の下流側に加えられると、下流側容量Csは、流れ斜面が進行中である間に、混合比によって、流れコントローラの一方または両方に対する極めて大きな充填流れを示している。Csの大きさにより、システム充填流れは、システムへの傾斜バルク流よりはるかに大きく、流量変換器533A、533Bの流れ範囲能力を容易に超えることができる。Csの余分な流れは、流量変換器533A、533Bを開ループにし、その結果、組成制御の損失につながる。
【0130】
ハイブリッド方式で、混合T字部523内への流れ行程の1つに対する制御方式は、流れ制御から圧力制御、例えばポンプ515Aの行程まで変えられる。ポンプ515Bを有する他の行程は、フィードフォワード修正および前に記載した全ての改良で、流れ制御モードで動作する。実際、流れ制御により使用する選択行程は、普通は有機ポンプ515Bである、バルク流れへの最も小さな貢献を処理するものである。これは、グラジエントまたは分析運転を開始および停止させる場合の、流れの状態である。ハイブリッド方式での流れ傾斜中に、圧縮のフィードフォワード補償での流れ制御による有機ポンプ515Bは、混合T字部523にわたる液体のスロッシングを防ぐように、基本的にゼロ流状態で所望の剛性を維持する。一方、混合T字部523内への2つのポンプ流れの相補的性質により、圧力制御による水性ポンプ515Aは、両方とも流量変換器533Aの上流側の全ての必要な充填流れ、および混合T字部523の下流側の充填流れを供給する。ハイブリッド方式の相補的圧力および流れモードは、流れ制御行程のフィードバックコントローラ550Bが開ループになるのを防ぎ、圧力制御行程はバルク流傾斜に沿うように、システムの残りを圧縮するのに必要な混合T字部523の下流側でエネルギーを供給する。制御方式に組み込まれた圧力モードでは、ポンプ515Bの流れ制御行程は、開ループになるのが防止され、システムのバルク流に対するその貢献についていくことが可能であり、したがってシステム内での正確な組成制御を維持する。別の実施形態では、ハイブリッド方式は、優れた誤差防止および修正をさらに行うように、図10のポンプ515Aの圧力コントローラ行程の出力命令信号内に図9に示すフィードフォワード修正要素459、463、471、473、475、477を組み込むことができる。
【0131】
予備成形グラジエント実施形態
図11を参照すると、対象技術による別の正流ナノスケールHPLC機器611が示されている。関連業界の当業者が分かるように、機器611は上に記載した機器と同様の原則を利用している。したがって、可能な限り同様な要素を示すのに、「6」という数字を前に置いた同様の参照数字が使用されている。上の機器と比べて機器611の基本的な違いは、予備成形されたグラジエントを維持するための貯蔵毛細管622の使用である。当業者が分かるように、本明細書に記載する対象方法およびシステムは、所望の性能を達成するために共に、別個に、およびあらゆる組合せで使用することができる。上と同様に、HPLC機器611は、2つの主な構成部品、バイナリ溶媒グラジエント送液サブシステム620および分析サブシステム604を有する。溶媒送液サブシステム620は、グラジエントを形成し、分析サブシステム604にこれを提供し、その上にクロマトグラムを生成する。溶媒送液サブシステム620は、対象技術の利点を提供するために、多くの代替分析設計に適合させることができると考えられる。大まかには、溶媒送液サブシステム620は1ステップで溶媒AおよびBの比較的低圧混合を実施して、グラジエントを形成し、第2のステップで分析サブシステム604へのグラジエントのその後の高圧送液を行う。第1の混合ステップは独立しており、第2の送液ステップと干渉しないという点において、これらのステップは直交している。溶媒送液サブシステム620は、2つのポンプ615A、615Bが利用されているという点においてバイナリである。各ポンプ615A、615Bはそれぞれ、インライン圧力変換器631A、631Bおよび流量変換器633A、633Bを通して案内される出力を作り出す。コントローラ625は、ポンプ615A、615Bの動作を管理し、変換器631A、631B、633A、633Bから信号を受ける。
【0132】
混合ノードまたはT字部623は、グラジエントを形成するように貯蔵毛細管622内に流れる、所望の溶媒混合物を形成するようにポンプ出力を組み合わせる。混合T字部623はT字形接続金具であり、貯蔵毛細管622は背圧および分散を最小限に抑えるような寸法をしていることが好ましい。貯蔵毛細管622からの下流側で、ナノT字接続金具624は2つの出口を形成する。ナノT字接続金具624の1つの出口は分析サブシステム604に連結し、もう一方の出口は放出バルブ626に連結する。放出バルブ626の動作はまた、コントローラ625によって管理され、それによって貯蔵毛細管622内にグラジエントを形成する間に、両方のポンプ615A、615Bが運転しながら、放出バルブ626が開いて残留流体を廃棄する。分析サブシステム604へのグラジエントの送液中に、ポンプ615Aのみが運転し、もう一方のポンプ615Bは「オフライン」である。機器611の構成部品の選択および配置は、溶媒送液サブシステム620の出口を混合T字部623の出口からナノT字接続金具624の出口まで移動させることが好ましい。放出バルブ626は、ピンバルブであることが好ましい。しかしピンバルブの代わりに、ボールバルブ、ゲートバルブ、グローブバルブ、バタフライバルブなどを使用することができる。
【0133】
分析サブシステム604は、溶媒送液サブシステム620の出口を試料インジェクタ619に連結させる、短い毛細管などの輸送ライン628を備えている。試料インジェクタ619は、試料リテーナ642内に蓄積された1つまたは複数のアナライト試料をグラジエントまたは流体流に案内する。アナライトが存在する場合、流体流が分析のためにカラム667に案内される。カラム667では、アナライトが隔離され、分離され、検出器669に案内される。検出器669は、特定の応用例に適切である、質量分析計、紫外線検出器などのあらゆるタイプであることが好ましい。検出器669の読取に基づき、クロマトグラムが生成される。ポンプ615Aは、2つの移動相溶媒の一方(例えば、水性溶媒)をリザーバ供給部(図示せず)から混合T字部623に案内する独立型高圧ポンプであることが好ましい。上記と同様に、水性ポンプ615Aの出口の溶媒流れは、機器作動圧力の測定を行うために、インライン圧力変換器631Aによって読み取られる。流量変換器633Aは、混合T字部623内に入る際に、水性溶媒の直接ナノ流測定を行う。これらの信号はそれぞれ、水性ポンプ615Aの閉ループ制御のためにコントローラ625まで通過される。したがって、コントローラ625は高圧シール、水性ポンプ615Aの逆止バルブ、および当業者によく知られている同様の問題による大きな寄生流漏洩があるにも関わらず、流量変換器633Aの上流側で正確な流れ送液を維持することが可能である。
【0134】
同様に、ポンプ615Bは、圧力変換器631Bおよび流量変換器633Bを供給する別の独立型高圧ポンプである。しかし一方で、ポンプ615Bは相補的移動相溶媒(例えば、有機溶媒)をリザーバ供給部(図示せず)から混合T字部623まで案内する。圧力変換器631Bおよび流量変換器633Bの信号はまた、コントローラ625に供給されるので、完全な閉ループ制御が可能である。コントローラ625は、混合T字部623内への各ポンプ615A、615Bの送液流れを調整することによって、分析サブシステム604への所望のユーザ設定バルク流れと、2つの溶媒の組成混合比を確立する。一実施形態では、流量変換器633A、633Bからの導管は、2つのポンプ615Aと615Bの間の受動流体分離を行って混合T字部623にわたる2つの流れ制御ループの固有の相互作用を安定させる毛細管リストリクタである。別の実施形態では、毛細管リストリクタが、流量変換器633A、633Bの上流側に設けられている。いずれの場合でも、または両方が使用される場合、2つのポンプ615A、615Bからのフィードバック不安定と、直交流および/または逆流汚染が避けられる。
【0135】
グラジエント形成および送液
次に図12を参照すると、グラジエントを分析サブシステム604に提供するために溶媒送液サブシステム620を操作するプロセスが、流れ図として示されている。ステップS1では、グラジエント形成の前に、コントローラ625は、放出バルブ626を開いて、貯蔵毛細管622内の古い残留流体(例えば、100%水性溶媒)を案内して廃棄することによって、溶媒送液サブシステム620を準備する。現在知られている、または後に開発されるあらゆる適切な導管、管またはマイクロ流体構造を使用して、貯蔵毛細管622の機能を行うことができると考えられる。基本的に大気に通気される貯蔵毛細管622内でのグラジエントの形成は、以下の3つの機能を達成する。1)カラム667または他の連結された消耗品と関係なく、形成背圧が貯蔵毛細管622の幾何形状によって正確に制御される。2)注入運転間のカラム667の平衡状態を狂わせるのを防ぐために、貯蔵毛細管622内の流体がパージされて廃棄される。3)形成中の流れの開始および停止による、形成されたグラジエントをひとまとめにするあらゆる先行または後行組成異常が、機器611の一次流体流から離れるように、すなわち分析サブシステム604およびその中のカラム667から離れるように案内される。ステップS2では、グラジエントは、ポンプ615A、615Bを低圧(例えば、100psi)およびより高い流量(例えば、通常のクロマトグラフィ流量の10から20倍)で動作させることによって、貯蔵毛細管622内に形成される。貯蔵毛細管622は、FIFO方式でグラジエントを受けることが好ましい。グラジエントが貯蔵毛細管622内に形成されると、分析サブシステム604への送液が後に、高圧および通常のクロマトグラフィ流量で起こる可能性がある。貯蔵毛細管622の幾何形状は、グラジエントに対する必要な貯蔵容量を達成し、背圧の形成およびグラジエント分散を最小限に抑えるような長さおよび内径の寸法をしている。グラジエント全体に加えて、貯蔵毛細管622の容量は、貯蔵毛細管22からカラム667までグラジエントを移動させるのに必要な輸送容量の追加のオーバーヘッドに対応するのに十分なだけ大きいことが好ましい。
【0136】
さらに図12を参照すると、ステップS3では、有機ポンプ615Bはグラジエントを送液する準備をするようにオフラインがとられる。したがって、有機ポンプ615Bは分析サブシステム604へのグラジエント送液に関与しない。好ましい一実施形態では、有機ポンプ615Bは、有機ポンプ615Bの閉ループ流れ制御をゼロの基準流れ設定で維持することによって、コントローラ625によりオフラインがとられる。別の実施形態では、有機ポンプ615Bは、混合T字部623の上流側でこれに隣接して隔離バルブ(図示せず)を利用することによって、オフラインがとられる。
【0137】
ステップS4では、コントローラ625は放出バルブ626を閉じて、形成されたグラジエントの流れを分析サブシステム604に案内する。その結果、閉ループ流れ制御で動作する水性ポンプ615Aは単に、ステップS5での送液のために貯蔵毛細管622からグラジエントを押し込むための、原動力として使用される。
【0138】
多数のカラムに対する流れ制御
注入運転中にカラムの特定の選択のために作動流量を変える必要がある応用例、例えば試料捕捉および2Dクロマトグラフィでは、流量が各カラムの選択の間で開始および停止される。図11の溶媒送液サブシステム620は、比較的大きなシリンダ容量のポンプ615A、615Bおよびカラムへのナノスケールの流れ送液にも関わらず、このようなLCシステム内に様々なグラジエントを提供するように十分適合されている。一実施形態では、コントローラ625は放出バルブ626が開いて廃棄する状態でポンプ615A、615Bをリセットし、定常流れを得るために溶媒送液サブシステム620を待つ。効果的であるが、この動作は流体流を作動背圧に圧縮するのに必要な蓄積エネルギーの比較的大きな容量変化により、望ましくないほど時間がかかる可能性がある。
【0139】
例えば、水性ポンプ615Aの圧縮定数(例えば、圧力変化あたりの容量変化)は、約0.5nL/psiであることが好ましい。特定の毛細管カラム(例えば、75μm内径×250mm×1.7μm粒子)に対する300nL/minの流量で約9,000psiの定常圧力に到達するのに必要な時間は、以下の計算で示すように約15分である。
ΔV=C・ΔP=0.0005uL/psi*9,000psi=4.5uL
T=ΔV/q=4.5nL/0.300uL/min=15min
【0140】
次に図13を参照すると、多数のカラムを有するLCシステム(図示せず)に対する溶媒送液サブシステムによる一連の注入運転を行う場合にゆっくりな流れ開始を避けるプロセスが示されている。別には示さないが、この溶媒送液サブシステムはちょうど図11に示すようなものであってもよい。したがって、明確にするため、図11の溶媒送液サブシステム620に対する言及を再び利用する。大まかには、溶媒送液サブシステム620は、システム圧力を前の運転から前の定常流状態に迅速に圧縮するように圧力制御による流れ送液を開始し、その後、流れ制御に移行する。
【0141】
図13のプロセスは、カラムが次の運転のために開始状態に再平衡される場合に、注入運転の終わりから始まる。図13のステップS1では、コントローラ625は、使用される次のカラムのためにユーザによって選択された流量を受け、記憶する。ステップS2では、コントローラ625は、前のカラム注入で望ましいように、圧力変換器633からのシステム圧力測定値を記憶する。ステップS3では、図2に関して上で説明したように、流れが停止し、新しいグラジエントが形成される。流れ送液を開始するために、コントローラ625は、圧力変換器633Aをフィードバックとして使用して、閉ループ圧力制御で動作するように水性ポンプ615Aを構成する。
【0142】
ステップS4では、コントローラ625は基準設定点(例えば、目標圧力)を前の運転から記憶されたシステム圧力測定値に設定する。その後、水性ポンプ615Aは基準設定点を得るために運転される。システム圧力が基準設定点に到達すると、すなわち定常圧力まで圧縮して戻されると、図13のプロセスはステップS5に進む。
【0143】
ステップS5では、コントローラ625は、流量変換器633Aをフィードバックとして使用して、水性ポンプ615Aを閉ループ流れ制御に移行し、基準設定点をステップS1で受けられたユーザ設定溶出流量に設定する。所望の溶出流量に到達すると、プロセスはステップS6に進み、ここで新しいグラジエントの送液が起こる。閉ループ流れ制御で動作する水性ポンプ615Aは単に、送液のために貯蔵毛細管622からグラジエントを押し込むための原動力として使用される。
【0144】
図11に示す設計に対する別の変更形態も、対象技術の範囲内にある。例えば、これに限らないが、貯蔵毛細管622、ナノT字接続金具624、および放出バルブ626が図11ではインジェクタ619の前に示されている。グラジエント輸送遅延を最小限に抑えるために、要素624、626はできるだけインジェクタ619の近くに配置することができる。その結果、輸送ラインまたは要素628を取り除き、貯蔵毛細管622に換えることができる。貯蔵毛細管622を試料インジェクタ619およびカラム667により近接して移動させることはまた、熱管理区画内にしばしば配置される、カラム667と貯蔵毛細管622を同一に配置する機会を示している。貯蔵毛細管622のこのような配置は都合の良いことに、貯蔵毛細管622を外部温度変化から隔離して、保持時間再現性を良くする。
【0145】
別の例では、対象技術は、貯蔵毛細管および放出バルブに加えて、マサチューセッツ州MilfordのWaters Corporation社のWATERS(登録商標)ナノAQUITY UPLC(商標)システムに簡単に適合させることができる。これらの機器では、作動圧力は10,000から15,000psi超の圧力定格にわたり、作動送液流量は約10nL/minであることが可能である。さらに、WATERS(登録商標)ナノAQUITY UPLC(商標)システムは、以下により詳細に説明するように、優れた感度に対する可変流れ/ピークパーキング特性、および上に説明したフィードフォワード補償を提供することができる。
【0146】
捕捉実施形態
対象技術はまた有利には、極めて制限的なカラムと直列に短い捕捉カラムを使用する捕捉応用例(すなわち、高い捕捉容量応用例)に適用される。このような状況では、流れの停止は、圧力が最終的にゼロ近くに下がる長い時間間隔を特徴としている。長い時間間隔は、高い容量の捕捉カラム(すなわち、圧縮の蓄積エネルギー)によって作り出された捕捉システムの極めて大きい有効時定数、および分析カラムの大きな抑制(すなわち、限られた流れ)によるものである。有効時定数は、数十分であってもよい。捕捉応用例におけるこのような長い時定数を回避するために、対象の溶媒送液サブシステムの原則を利用することができる。さらに、グラジエントを効率的に形成することによって、バルブなどの普通の捕捉構成部品の使用およびその磨耗は、寿命を延ばすように最小限に抑えることができる。
【0147】
次に図14を参照すると、溶媒送液システム720が、捕捉応用例システム711内の使用で示されている。当業者が分かるように、システム711は、図11に示すのと同様の溶媒送液サブシステム720を利用する。したがって、可能な限り同様な要素を示すのに、「7」という数字を前に置いた同様の参照数字が使用されている。システム711では、試料装填、試料捕捉およびグラジエント形成の動作が一連になっていることが好ましい。
【0148】
システム711は、加熱捕捉モジュール704に連結された試料マネージャ720を備えている。試料マネージャ720は、溶媒送液サブシステム720および加熱捕捉モジュール750に連結された注入または装填バルブ742を備えている。注射器744および針746はまた、注入バルブ742に連結されている。加熱捕捉モジュール750は、分析カラム767と直列である捕捉カラム752を有し、捕捉カラム752は注入バルブ742に連結されている。捕捉カラム752と分析カラム767の間にあるT字接続金具756は、捕捉バルブ758に連結している。
【0149】
明確にするために、圧力変換器は図14には示されていないことに留意されたい。圧力変換器は、ポンプ715A、715Bの一体構成部品として存在している。しかし、小さなリストリクタ770が図では、流量変換器733Aのすぐ上流側に連結され、大きなリストリクタ771が図では、流量変換器733Bのすぐ上流側に連結されており、このようなリストリクタは存在していることが好ましいが、本明細書の他の実施形態では省略されている。リストリクタ770、771は、混合T字部723への相互連結により、ポンプ715Aと715Bの間の潜在的な相互作用を減衰するように働く。実際、リストリクタ770、771は、混合T字部723にわたってポンプ715Aと715Bの間の逆流を最小限に抑える。ポンプ715Aが原動力として働き、最も粘性のある液体(例えば、水)を移動させる場合、関連するリストリクタ770が比較的小さい。好ましい一実施形態では、小さいリストリクタ770は約0.025cm内径×20cm長さであり、大きなリストリクタ771は約0.025内径×45cm長さである。別の好ましい実施形態では、小さなリストリクタ770は約25μm内径×20cmであり、大きいリストリクタ771は約25μm内径×150cmである。リストリクタは異なっていてもよいが、リストリクタはまた同じ値および寸法を有してもよい。
【0150】
試料を装填するために、針746がよく知られている方法で試料内に配置される。注射器744は、流れが注入バルブ742の点3から点4、点1、点2、針746に通過するように設定された、注入バルブ742内に針746を通して試料を引くように吸引を行う。終了の際、試料は注入バルブ742の点4と1の間でループ745内に配置される。この点では、試料は捕捉カラム752上に置かれることによって、洗浄および濃縮される準備ができている。
【0151】
試料捕捉中に、流れの正確な制御は必要ないが、試料をループ745から捕捉カラム752まで移動させるために、高い流れが望ましい。普通、試料は約4μL/minなどの毛細管スケールである。好ましい一実施形態では、溶媒送液システム720は、試料を捕捉カラム752上に1,000psiだけで移動させるように、5分の期間だけ5から15μL/minで移動する。
【0152】
試料捕捉では、加熱捕捉モジュール750の条件は有利には、高圧/低流から低圧/高流に移行する。これを達成するために、溶媒送液サブシステム720は、圧力制御モードにより加熱捕捉モジュール750を急速に減圧することによって流れを止める。コントローラ(図示せず)は、内部圧力変換器をフィードバックとして使用して、水性または推進ポンプ715Aを流れ制御から圧力制御モードに再構成することによって、急速減圧を達成する。その後、コントローラは基準圧力設定点をゼロに設定し、ポンプ715Aの動作を開始する。有機ポンプ715Bは同様に制御されることが好ましい。別の実施形態では、水性ポンプ715Aだけが、試料捕捉中に運転する。
【0153】
さらに図14を参照すると、システム711がポンプ715A、715Bを運転させると、ピンバルブ726が点5で注入バルブ742内に流れを案内するように閉じられる。注入バルブ742は、流れが点5から、点4、点1まで通過して点2で出て、試料を担持するように設定されている。流れはその後、捕捉バルブ758が開いて点6で廃棄する状態で、加熱捕捉モジュール750内に通過する。その結果、流れは捕捉カラム752を通して案内されるが、その後、T字接続金具756を通して通過して、捕捉バルブ758の点1を介して点6に廃棄する。この流れの結果、試料は捕捉カラム752上を通過する。
【0154】
次に、システム711は溶出運転で使用されるグラジエントを形成する。溶媒送液サブシステム720は、グラジエントを形成するために、上に記載するように運転される。特に、ピンバルブ726は開いて廃棄し、ポンプ715A、715Bはグラジエントが貯蔵毛細管722内に入るまで運転される。これは、大気と300psiの間のシステム圧力であるが、高流につながる。
【0155】
溶出運転を行うために、溶媒送液サブシステム720は、グラジエントを送液するために上に記載したように運転されるポンプ715Aを有する。グラジエントは、注入バルブ742の点5に入り、点6で捕捉カラム752内に出る。捕捉バルブ758が経路を効果的に閉じて廃棄する状態で、流れはT字接続金具756および分析カラム767を通して質量分光システム(図示せず)まで通過する。有機ポンプ715Bは溶出運転中に流れを運んでいないが、ポンプ715Bはまたゼロ流に設定しながら圧縮する。あるいは、ポンプ715Aは混合T字部723にわたって流れを押し込み、汚染につながる。別の方法では、汚染が認められる可能性があり、その後のグラジエント形成の前に、ポンプ715A、715Bを洗浄のために運転させて廃棄することができる。
【0156】
次に図15を参照すると、別の溶媒送液システム820が捕捉応用例システム811の使用で示されている。当業者に分かるように、システム811は上に記載したシステムと同様の原則を利用している。したがって、可能な限り同様な要素を示すのに、「8」という数字を最初に付けた同様の参照数字が使用されている。システム811の主な違いは、補助溶媒マネージャ(ASM)860およびASM860を収納するための変更配管の追加である。システム811は、試料装填、試料捕捉およびグラジエント形成の動作間のより大きな平衡を可能にする。加えて、より少ない流れ遮断および単一組成捕捉動作を実現することができる。
【0157】
ASM860は、注入バルブ842の点5に連結された追加のポンプ862を有する。捕捉カラム852に連結するよりは、注入バルブ842の点6は捕捉バルブ858の点4に連結する。溶媒送液サブシステム820の出力は、捕捉バルブ858の点2に連結し、それによって捕捉カラム852は、コントローラ(図示せず)によって選択されるように、注入バルブ842または溶媒送液サブシステム820から流れを受けることができる。
【0158】
試料装填およびグラジエント形成は同時に行うことができると考えられる。捕捉バルブ858に連結された溶媒送液サブシステム820の出力を有することによって、試料マネージャ440Bは隔離され、それによってこれらの動作は同時に起こることができる。加えて、試料捕捉およびグラジエント形成が並行して起こる可能性がある。グラジエントが図14に関して上に記載したように形成される間に、ポンプ862は流れを点5で注入バルブ842内に押して点4へ、ループ845を通し、点1を通って、点6で出る。流れは、点4で捕捉バルブ858内に進んで、点3で捕捉カラム852内に出る。捕捉カラム852を出る際に、流れは移動してT字部856を介して廃棄し、また点1で捕捉バルブ858内に移動して、点6で出る。
【0159】
溶出運転中に、有機ポンプ815Bが圧縮するがゼロ流に設定されながら、水性ポンプ815Aが流体の原動力である状態で、上に記載したのと極めて同様に動作する。したがって、グラジエントは貯蔵毛細管822から点3で捕捉バルブ858内に移動して、点2で出る。捕捉バルブ858から、廃棄のための経路が閉じられているので、流れは捕捉カラム852を通して分析カラム867内に通過する。
【0160】
システム811の構成はまた有利には、構成部品の最適化を可能にする。例えば、ポンプ862は普通、高い流れ、すなわち20μL/minで運転し、水性ポンプ815Aは1μL/minのごく僅かで運転する可能性がある。この流れ範囲をカバーするのに単一の変換器を使用しようと試みるのではなく、各ポンプ815A、862は関連する範囲に特に調整された流量変換器を有することができる。
【0161】
ピークパーキング実施形態
次に図16を参照すると、例えば図11の分析サブシステム604まで溶媒送液サブシステム620の溶出流量を急速に小さくするプロセスが示されている。明確にするために、またこのピークパーキングを効率的に達成するのに同じ構成部品を使用することができるので、図11が再び言及されている。ピークパーキングはまた、図4に示すものなどの多くの他の流体クロマトグラフィシステムの構成で行うこともできることが考えられる。図11では、送液ポンプ、普通は631Aだけが、新しい所望の流れに対して「傾斜」する。というのは、これが、グラジエントが分析カラム676に運ばれている場合の流体送液に関連する唯一のポンプだからである。図4の場合、両方の変換器213AB、233ABは傾斜プロセスを制御するのに利用される。図16のステップS1では、検出器669による関連する単一の溶出ピークの検出の際、コントローラ625はバルク流れを分析サブシステム604に「パーキング」または減少させるように信号を受ける。一実施形態では、分析サブシステム604はパーキング信号をコントローラ625に送信する。ステップS2では、コントローラ625は圧力変換器631A、631Bから既存のシステム圧力測定値を記憶する。
【0162】
ステップS3では、コントローラ625は新しい小さな目標圧力を算出し、圧力変換器631A、631Bを使用して閉ループ流れ制御から閉ループ圧力制御に切り換える。コントローラ625は、以下の式に従って、LC機器611の直線「オーム」流体負荷を推定することによって、新しい小さな目標圧力を算出する:
R=送液圧力÷送液流れ
式中、Rは抑制充填である。すなわち、小さな圧力を測定するために、コントローラ625は所望の流量減少として同じ比率で必要とされる小さな圧力を目標としている。例えば、9000psiのシステム圧力で300nL/minでのシステム送液流体であるとする。これは、30psi/(nL/min)のシステム負荷に相関している。目標流量が50nL/minである場合、このシステムに対する目標圧力は1500psiである。
【0163】
ピークパークイベントの持続時間によって、コントローラ625は、より正確で再現可能な流れ送液のために、小さな流れ設定で流れ制御モードに戻るように移行することができる。圧力モードでの動作は、より速い減圧反応時間の利点を提供する。というのは、流量変換器633A、633Bは圧力変換器631A、631Bと比べてはるかに小さい信号帯域幅を有するからである。その結果、溶出流量は最大50分の1以上に小さくすることができる。
【0164】
ステップS4では、溶出ピークの検出が完了し、コントローラ625は、記憶したシステム圧力測定値を新しい圧力目標として使用して、ステップS1からS3を逆にすることによって、通常の溶出流量に流れを戻す。従来の高圧混合方式を凌ぐこの方法の利点は、グラジエントが予備成形され、単一の流体駆動ポンプ(例えば、水性ポンプ615A)のみが使用されて流れ変化を行うので、圧縮エネルギーが取り出されるまたは流体流内に戻される場合のグラジエントの破損に関連する問題が取り除かれるということである。
【0165】
カラムとのグラジエント貯蔵装置の同一配置の実施形態
次に図17から図19を参照すると、LC機器の性能は、グラジエント遅延時間、すなわち貯蔵毛細管または配置からカラムに、予備成形したかどうかに関わらずグラジエントを送液するのにかかる時間を短くすることによってさらに改良することができる。大まかには、グラジエント遅延時間は、グラジエント貯蔵装置をカラムに同一配置、または直接連結することによって短くすることができる。さらに、グラジエント分散はまた、同一配置によって減少し、試料注入時間は注入により高いグラジエント形成流量を使用することによって短くなる。
【0166】
図17を参照すると、通気バルブを備えていないグラジエント貯蔵装置を使用するLC機器を例示した、いくらか略図的なブロック図が全体的に911と言われている。当業者が分かるように、LC機器911は上に記載したシステムと同様の原則を利用している。したがって、以下の説明は大きな違いを対象としている。上のシステムと同様に、LC機器911は、MS検出器969の分析カラム967にグラジエントを送液するために、ループ945を有する注入バルブ942を備えている。注入バルブ942は、バイナリポンプ920、注射器944、および試料容器946に連結されている。
【0167】
LC機器911の違いは、グラジエント貯蔵装置922が注入バルブ942と分析カラム967の間に設けられているということである。グラジエント貯蔵装置922は、高い流量でのグラジエント装填、および通常の流量での送液を可能にする。グラジエントが装填された場合に発生する背圧は、グラジエントが運転している場合に作り出されるものより数倍も高い可能性がある。例えば、3.5μm粒子が詰められた25μm内径×10cm長さの分析カラム967では、試料装填およびグラジエント予備成形が、試料装填時間を短くするように分析カラム967をオンラインにした状態で、約8,000psiの圧力により250nl/minで起こる。一方、グラジエント送液は、超高感度分析のために約800psiによる25nl/minで起こる。グラジエントが高い流量で装填されているので、試料は実行時間(例えば、実行時間の試料装填時間部分)を効果的に短くするように同時に注入することができる。
【0168】
グラジエント貯蔵装置922は、分析カラム967に直接連結することができる。グラジエント貯蔵装置922を分析カラム967のより近くに配置することによって、グラジエントを送液する際の遅延が最小限に抑えられ、グラジエントの分散が少なくなる。グラジエント貯蔵装置922は、あらゆる充填マトリックスを備えたまたは備えていない毛細管配管の空の部分と同じくらい扱いやすい。グラジエント貯蔵装置922の内径は、分析カラム967と同様の内径をしているが、グラジエント貯蔵装置922の容量はグラジエント容量と等しいまたはこれよりいくらか大きいことが好ましい。別の実施形態では、グラジエント貯蔵装置922は分析カラム967と一体である。
【0169】
グラジエント装填時間をさらに短くするために、合計グラジエント遅延容量(すなわち、注入ループ容量およびグラジエント貯蔵装置容量)は、グラジエント容量と等しくまたはこれより僅かに大きくされる。上記利点を鑑みて、対象技術は幅広い応用例を有すると考えられる。例えば有利には、約300nl/minでグラジエントを形成し、約30nl/minでグラジエントを送液するように、オフライン2Dシステムの第2の寸法分離などの高スループット分離で、またはより狭いナノカラム(例えば、25μm内径)を使用する超感度分析で適用することができる。
【0170】
図18を参照すると、通気バルブを備えたグラジエント貯蔵装置を使用する別のLC機器を例示するいくらか略図的なブロック図が全体的に、参照番号911Aで参照されている。LC機器911Aが機器911と同じ構成部分の多くを有するということを示すために、可能な限り同様の要素を特定するために「A」という接尾辞を使用している。LC機器911Aは、上記のものと同様であるが、グラジエント貯蔵装置922Aと分析カラム967Aの間に捕捉カラム952Aおよび通気バルブ941Aを備えている。通気バルブ941Aを使用することによって、LC機器911Aは捕捉カラム952Aとの使用に十分適している。通気バルブ941Aの追加により、所望のように運転圧力より低い装填圧力でLC機器911Aを作動することが可能である。
【0171】
次に図19を参照すると、比較的低い装填圧力でLC機器911Bを作動させることが可能な別の配置を備えたさらに別のLC機器911Bが示されている。LC機器911Aが機器911、911Aと同じ構成部分の多くを有するということを示すために、可能な限り同様の要素を特定するために「B」という接尾辞を使用している。LC機器911Bは、捕捉カラム952Bと分析カラム967Bの間にT字接続部923を備えている。T字接続部923は、図示および上に記載したように、廃棄のための流路を最終的に作り出すことができるバイナリポンプ920Bまで延びている。実際、T字接続部923は図18の通気バルブ941Aと同じ機能を果たす。LC機器911Bはまた、図15に関して示し、上に記載したのと同様のアイソクラテックポンプ962および捕捉バルブ958を有する。これらの同一配置実施例から分かるように、試料装填時間を短くするように、極めて高い流量を使用してグラジエントを装填するのと同時に試料が注入されると考えられる。
【0172】
当業者が分かるように、対象技術は低流高圧応用例に対する明らかな利点を備えた様々な応用例での溶媒送液サブシステムとして使用するように適用可能なだけでなく、有利には多くの応用例で使用することができる。例えば、対象技術は捕捉カラムを備えていないシステムに極めて適用可能である。いくつかの要素の機能は、代替実施形態では、より少ない要素、または単一の要素で行うことができる。同様に、いくつかの実施形態では、あらゆる機能要素は、例示した実施形態に関して記載したのより少ないまたは異なる動作を行うことができる。また、例示する目的で別個に示した機能要素(例えば、圧力および流量変換器など)は、他の機能要素内に組み込む、異なるハードウェア内で分離させる、または特定の実施のための様々な方法で分配することができる。さらに、相対寸法および位置は単にいくらか略図的なものであり、同じものだけでなく多くの他の実施形態も様々な描写を有することができることを理解されたい。
【0173】
本発明は特定の例示的な実施形態に関して説明したが、当業者は様々な変更および/または変形を本発明の精神または範囲から逸脱することなく本発明に加えることができることがすぐに分かるだろう。
【0174】
参照としての援用
本出願全体を通して引用した全ての参照文献(文献、発行特許、公開特許出願、および同時係属特許出願を含む)の内容は、全体を参照として本明細書に明示的に援用する。
【0175】
同等物
当業者は、日常的な実験にすぎないものを使用して、本明細書に記載した本発明の特定の実施形態の多くの同等物を認識する、または確定することが可能である。このような同等物は、特許請求の範囲に含まれることを意図している。
【図面の簡単な説明】
【0176】
【図1A】どのように図1Aおよび図1Bを適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLC機器を示す略ブロック図である。
【図1B】どのように図1Bと適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLCを示す略ブロック図である。
【図2】対象技術による、図1Aと機器内で混合物を送液するプロセスの流れ図である。
【図3】図1Aおよび図1BのHPLC機器の内容で、動作のサイクル中の流れおよび圧力変化を示すタイミング図である。
【図4A】どのように図4Bと適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLC機器を示す略ブロック図である。
【図4B】どのように図4Aと適切に接続するかを示すように、整合指示が存在する、対象技術によるフィードフォワード原則を利用する溶媒送液サブシステムを使用するHPLC機器を示す略ブロック図である。
【図5】対象技術による流れ制御方式を示すように、より詳細な図4Aおよび図4Bの制御手段の略図である。
【図6】対象技術による、図4A、図4Bおよび図5の機器と等価の電気回路である。
【図7】対象技術によるフィードフォワード補償の利用をさらに特に示すように示された、図4Aおよび図4B機器のさらに詳細な図である。
【図8】対象技術によるフィードフォワード信号の特定の成分をさらに特に示すように示された、LC機器のさらに詳細な別の図である。
【図9】対象技術により、エネルギーまたは電荷Csを負荷に与えるようにシステムまたは負荷流れIsを有するLC機器と等価の別の電気回路である。
【図10】対象技術により、フィードフォワード信号を使用するハイブリッド方法を特に示すように示された、LC機器のより詳細なさらに別の図である。
【図11】対象技術により、グラジエントを予備成形する溶媒送液サブシステムを使用して、正流ナノスケールHPLCシステムを示す略ブロック図である。
【図12】対象技術により、図1のシステム内でグラジエントを形成および送液するプロセスの流れ図である。
【図13】対象技術による、異なるカラムを使用した一連の注入運転を行う場合に、遅い流れ開始を避けるプロセスの別の流れ図である。
【図14】対象技術による、溶媒送液サブシステムを使用した、正流ナノスケール捕捉システムを示す略ブロック図である。
【図15】対象技術による、追加のポンプを備えた溶媒送液サブシステムを使用した別の正流ナノスケール捕捉システムを示す略ブロック図である。
【図16】対象技術によるピークパーキングのプロセスの別の流れ図である。
【図17】対象技術による、通気バルブを備えていないグラジエント貯蔵装置を使用するLC機器を示す略ブロック図である。
【図18】対象技術による、通気バルブを備えたグラジエント貯蔵装置を使用する別のLC機器を示す略ブロック図である。
【図19】対象技術による、通気バルブ、バイナリバルブおよびアイソクラテックバルブを備えたグラジエント貯蔵装置を使用するさらに別のLC機器を示す略ブロック図である。
【特許請求の範囲】
【請求項1】
貯蔵毛細管を充填するポンプを有する液体クロマトグラフィシステムにグラジエントを形成する方法であって、
貯蔵毛細管を大気に通気させるステップと、
グラジエントが中に形成されるまで貯蔵毛細管を充填するように比較的低い圧力およびより高い流量でポンプを運転させるステップとを含む、方法。
【請求項2】
比較的低い圧力が約100psiであり、比較的より高い流量が通常のクロマトグラフィ流量の約15倍である、請求項1に記載の方法。
【請求項3】
貯蔵毛細管の幾何形状が、グラジエントに対する容量を達成し、背圧およびグラジエント分散の形成を最小限に抑えるような長さおよび内径の寸法をしている、請求項1に記載の方法。
【請求項4】
貯蔵毛細管の容量が、グラジエントおよびグラジエントを分離カラムに移動させるのに必要な輸送容量のオーバーヘッドに対応するような寸法をしている、請求項3に記載の方法。
【請求項5】
ポンプが、水性ポンプおよび有機ポンプを含んでおり、前記水性および有機ポンプがそれぞれ、ポンプと貯蔵毛細管の間で混合ノードに連結されている出力を有する、請求項1に記載の方法。
【請求項6】
さらに、有機ポンプをオフラインにするステップと、
貯蔵毛細管を大気から閉じるステップと、
グラジエントを分離カラムに送液するように水性ポンプを運転させるステップとを含む、請求項5に記載の方法。
【請求項7】
閉じるステップが、貯蔵毛細管の上流側に連結されたバルブによって達成される、請求項6に記載の方法。
【請求項8】
さらに、混合ノードにわたるクロス汚染を防ぐようにグラジエント形成の前に、ポンプを運転させて廃棄するステップを含む、請求項5に記載の方法。
【請求項9】
さらに、混合ノードにわたるクロス汚染を防ぐようにゼロ流に設定された有機ポンプを運転させるステップを含む、請求項5に記載の方法。
【請求項10】
別のグラジエントを形成するために待機中の貯蔵毛細管をパージするために、バルブを開き、ポンプの少なくとも1つを運転させるステップをさらに含む、請求項1に記載の方法。
【請求項11】
グラジエントをナノ流毛細管液体クロマトグラフィ装置に与えるシステムであって、
第1の出力を作り出す水性ポンプと、
溶液を作り出す第1の出力と混合された第2の出力を作り出す有機ポンプと、
ポンプを制御する処理装置と、
溶液の一部からグラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、ナノ流毛細管液体クロマトグラフィ装置に接続された第1の出口、および第2の出口を形成する接続金具と、
第2の出口に連結し、貯蔵毛細管内でのグラジエントの形成中に、水性および有機ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御されたバルブとを備えた、システム。
【請求項12】
ナノ流毛細管液体クロマトグラフィ装置へのグラジエントの送液中に、バルブが閉じられ、水性ポンプが運転し、有機ポンプがオフラインである、請求項11に記載のシステム。
【請求項13】
さらに、第1の出力を受ける第1のインライン圧力変換器および第1の流量変換器と、
第2の出力を受ける第2のインライン圧力変換器および第2の流量変換器とを有するシステムであって、
各変換器が、閉ループフィードバック制御を行うように処理装置と通信している、請求項11に記載のシステム。
【請求項14】
貯蔵毛細管が、形成されたグラジエントの完全性を保持するために背圧および分散を最小限に抑えるような寸法をしている、請求項11に記載のシステム。
【請求項15】
第1および第2の出力を1つの流体流に混合する流体組合せ接続金具をさらに備えた、請求項11に記載のシステム。
【請求項16】
ナノ流毛細管液体クロマトグラフィ装置が、分離カラムと、グラジエントを受け、グラジエントを分離カラムに案内するインジェクタと、分離カラムおよびインジェクタを格納する熱管理区画とを備え、貯蔵毛細管、接続金具およびバルブが熱管理区画内に同一配置されている、請求項11に記載のシステム。
【請求項17】
ナノ流毛細管液体クロマトグラフィ装置の試料インジェクタに接続金具を連結させる輸送ラインをさらに備えた、請求項11に記載のシステム。
【請求項18】
輸送ラインが毛細管である、請求項17に記載のシステム。
【請求項19】
液体クロマトグラフィ(LC)装置用溶媒送液サブシステムであって、
第1の出力を作り出す第1のポンプと、
そのパラメータを監視するために第1の出力を受けるように接続された第1の変換器と、
第2の出力を作り出す第2のポンプと、
そのパラメータを監視するために第2の出力を受けるように接続された第2の変換器と、
第1および第2の出力を組み合わせる混合ノードと、
第1と第2のポンプの間の受動流体分離を行って混合ノードにわたる相互作用を安定化させて抑止を行うように、各ポンプと混合ノードの間に導管とを備えた、溶媒送液サブシステム。
【請求項20】
導管が容量を少なくするための毛細管リストリクタである、請求項19に記載の溶媒送液サブシステム。
【請求項21】
導管が、第1および第2の変換器の下流側に設けられている、請求項19に記載の溶媒送液サブシステム。
【請求項22】
第1および第2の変換器が流量変換器である、請求項19に記載の溶媒送液サブシステム。
【請求項23】
第1および第2の変換器からのフィードバック信号を使用することによって、第1および第2のポンプを制御する処理装置をさらに備えた、請求項19に記載の溶媒送液サブシステム。
【請求項24】
混合ノードの出力からグラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、LC装置に接続された第1の出口、および第2の出口を形成する接続金具と、
第2の出口に連結し、貯蔵毛細管内でのグラジエントの形成中に、ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御されたバルブとをさらに備えた、請求項23に記載の溶媒送液サブシステム。
【請求項25】
試料を分離カラム内に案内するインジェクタを有する液体クロマトグラフィ装置にグラジエントを送液するシステムであって、
第1のインライン圧力変換器および第1の流量変換器を通して案内される水性出力を作り出す水性ポンプを有する第1の行程と、
第2のインライン圧力変換器および第2の流量変換器を通して案内される有機出力を作り出す有機ポンプを有する第2の行程と、
変換器の少なくとも1つの上流側で寄生損失を克服するように変換器の少なくとも1つからの測定信号から導き出された誤差に基づいて、修正制御信号を発生させる閉ループフィードバックモードおよび、システムの蓄積エネルギーのパラメータに基づいて予測制御信号を発生させる開ループフィードフォワードモードを含んだ、各行程の流体流を制御する処理装置を含み、予測制御信号が水性出力と有機出力の間の圧縮比に基づき圧縮流を算出し、処理装置が異なるモードで各行程を選択的に操作することができる、システム。
【請求項26】
第3の出力を作り出すように第1および第2の出力を混合する第1の接続金具と、
グラジエントが第3の出力の一部を含み、貯蔵毛細管が背圧および分散を最小限に抑えるような寸法をしている、グラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、ナノ流毛細管液体クロマトグラフィ装置に連結された第1の出口および第2の出口を形成する第2の接続金具と、
第2の出口に連結されたバルブとを備えた、請求項25に記載のシステム。
【請求項27】
貯蔵毛細管内にグラジエントを形成する際に、水性および有機ポンプが運転している間に、バルブが開いて留まっている流体を案内して廃棄する、および
ナノ流毛細管液体クロマトグラフィ装置にグラジエントを送液する際に、水性ポンプのみが運転し、有機ポンプがオフラインであるように、バルブが処理装置によって制御されている、請求項26に記載のシステム。
【請求項28】
液体クロマトグラフィ装置内のグラジエントの送液の作動流量を変えるシステムであって、
a)圧力変換器および流量変換器を通して案内される出力を作り出すポンプと、
b)出力の一部からグラジエントを形成する貯蔵毛細管と、
c)ポンプを制御して、変換器から信号を受ける処理装置であって、ポンプ内のヘッドの容量および出力の圧縮性に基づいて、ポンプに修正フィードフォワード信号を与える処理装置とを備えた、システム。
【請求項29】
処理装置がさらに、
i)指示セットを記憶するメモリ、および
ii)メモリと通信している、指示セットを実行するプロセッサを備え、
プロセッサが、
(1)ナノ流毛細管クロマトグラフィ装置の第2のカラムが再平衡された場合に、注入の最後に圧力変換器からのシステム圧力測定値を記憶し、
(2)ナノ流毛細管クロマトグラフィ装置への流れを止め、
(3)第1のカラムに特に適合された新しいグラジエントを形成し、
(4)目標圧力をシステム圧力測定値と等しくなるように設定し、
(5)第1のカラムに対してユーザによって選択された流量を受けるおよび記憶し、
(6)圧力変換器からフィードバックでの閉ループ圧力制御においてポンプを使用して、システム圧力を第1の目標圧力にし、
(7)第1の目標圧力に到達する際に流量変換器をフィードバックとしてまた流量を目標流量として閉ループ流制御にポンプを移行し、
(8)ポンプを運転することによって新しいグラジエントの送液を再開するように動作可能である、請求項28に記載のシステム。
【請求項30】
さらに、第2の圧力変換器および第2の流量変換器を通して案内された出力を作り出す第2のポンプと、
ポンプの出力を組み合わせるように貯蔵毛細管に連結された混合ノードとを備えた、請求項29に記載のシステム。
【請求項31】
貯蔵毛細管に連結され、貯蔵毛細管を通気させるバルブをさらに備えた、請求項29に記載のシステム。
【請求項32】
プロセッサが、バルブがシステムの開口圧力より下の圧力に貯蔵毛細管に通気させるように、バルブを制御する、請求項29に記載のシステム。
【請求項33】
抑制カラムと直列な短い捕捉カラムを有するクロマトグラフィ装置用の溶媒送液システムであって、
a)第1の出力を作り出す第1のポンプと、
b)第1の出力を受けるように連結された圧力変換器および流量変換器と、
c)溶媒混合物を作り出すように、第1の出力と混合された第2の出力を作り出す第2のポンプと、
d)そのパラメータを監視するために第2の出力を受けるように連結されている第2の圧力変換器および第2の流量変換器と、
e)第1および第2の出力を組み合わせる混合ノードと、
f)閉ループフィードバックでポンプを作動させるコントローラとを備えた溶媒送液システムであって、
コントローラが、
i)圧力制御モードで閉ループフィードバックに圧力変換器を使用し、
ii)流れ制御モードで閉ループフィードバックに流量変換器を使用し、
iii)グラジエントを形成するように流れ制御モードで両方のポンプを使用し、
iv)グラジエントを送液するように第1のポンプのみを使用し、
v)圧力制御モードを使用して抑制カラムと直列な短い捕捉カラムを迅速に減圧することによって流れを止め、
vi)基準圧力設定点をゼロに設定し、
vii)抑制カラムと直列な短い捕捉カラムの長時定数を乗り越えるために第1のポンプの動作を開始するようにプログラミングされている、溶媒送液システム。
【請求項34】
第1のポンプが、グラジエントを送液する場合に流れ制御モードである、請求項33に記載の溶媒送液システム。
【請求項35】
グラジエントを受ける貯蔵毛細管をさらに備えた、請求項33に記載の溶媒送液システム。
【請求項36】
第1と第2のポンプの間の受動流体分離を行って混合ノードにわたる相互作用を安定化させるように、各ポンプと混合ノードの間に導管をさらに備えた、請求項33に記載の溶媒送液システム。
【請求項37】
グラジエントの形成中に試料捕捉を行うように、短い捕捉カラムに連結された補助試料マネージャをさらに備えた、請求項33に記載の溶媒送液システム。
【請求項38】
試料装填を行うように注入バルブに連結された針をさらに備えた、請求項33に記載の溶媒送液システム。
【請求項39】
液体クロマトグラフィシステム内のピークパーキング方法であって、
混合物からグラジエントを予備成形するステップと、
閉ループフィードバックに流量変換器を使用することによって流量を制御するステップと、
圧力変換器を使用することによって送液圧力を監視するステップと、
運搬圧力、および関心のある溶出ピークに基づいて流量を少なくする信号に基づき、目標圧力を算出するステップと、
目標圧力を設定点とした閉ループフィードバックとして圧力変換器を使用することによって、流量を制御するように切り換えるステップとを含む、方法。
【請求項40】
さらに送液圧力を記憶するステップと、
記憶した送液圧力を使用することによって、送液流れを制御することに戻るステップとを含む、請求項39に記載の方法。
【請求項41】
目標圧力を算出するステップが、抑制負荷Rに基づいている、請求項39に記載の方法。
【請求項42】
a)クロマトグラムを生成する分離カラムを有する分析サブシステムと、
b)グラジエントを形成し、分析サブシステムにグラジエントを送液する溶媒送液システムとを備えた、ナノ流毛細管液体クロマトグラフィシステムであって、
溶媒送液システムが、第1の出力を作り出す水性ポンプと、
溶液を作り出す第1の出力と混合された第2の出力を作り出す有機ポンプと、
ポンプを制御する処理装置と、
溶液の一部からグラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、ナノ流毛細管液体クロマトグラフィ装置に接続された第1の出口、および第2の出口を形成する接続金具と、
第2の出口に連結し、貯蔵毛細管内でのグラジエントの形成中に、水性および有機ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御されたバルブとを備えている、ナノ流毛細管液体クロマトグラフィシステム。
【請求項43】
ナノ流毛細管液体クロマトグラフィ装置へのグラジエントの送液中に、バルブが閉じられ、水性ポンプが運転し、有機ポンプがオフラインである、請求項42に記載のナノ流毛細管液体クロマトグラフィシステム。
【請求項44】
さらに、第1の出力を受ける第1のインライン圧力変換器および第1の流量変換器と、
第2の出力を受ける第2のインライン圧力変換器および第2の流量変換器とを備えたナノ流毛細管液体クロマトグラフィシステムであって、
各変換器が、処理装置と通信している、請求項43に記載のナノ流毛細管液体クロマトグラフィシステム。
【請求項45】
少なくとも1つの作動圧力および1つの低圧を含む、圧力および流れの範囲において導管手段内で運ばれている流体流の完全性を維持する装置にして、前記導管手段が圧力を受けて前記流体を推進させるポンプ手段と流体連通しており、前記導管手段がバルブ手段と流体連通しており、前記バルブ手段が少なくとも第1の位置および第2の位置を有し、前記第1の位置では、前記流体が前記導管手段内で流れ、前記第2の位置では、流体が前記導管手段内に流れない装置であって、
前記バルブ手段と信号通信し、リニアバルブと信号通信している制御手段と、
前記導管内の圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するリニアバルブを備え、前記リニアバルブが
(i)前記第2の位置への前記バルブ手段の配置または予測配置に応じて、前記導管手段が前記1つまたは複数の作動圧力にある間に、前記低圧が得られるまで前記制御手段が第1の傾斜にある前記導管手段における前記選択パラメータを減少させるように前記リニアバルブに命令する、および
(ii)前記第1の位置をとる前記バルブ手段に応じて、または前記第1の位置をとる前記バルブ手段を予期して、前記導管手段が前記低圧において前記1つまたは複数の作動圧力が第2の斜面で得られるまで前記導管手段内の前記選択パラメータを増加させる、または
(iii)流体の完全性が維持されるように、(i)および(ii)の両方を行うリニアバルブとを備えた、装置。
【請求項46】
前記リニアバルブが、ある範囲の開口を有し、前記導管手段内の前記選択したパラメータを小さくおよび大きくすることが可能であるリニアバルブである、請求項45に記載の装置。
【請求項47】
前記リニアバルブ27が、前記第1の斜面または第2の斜面の少なくとも1つにおいて前記選択したパラメータにより、前記少なくとも1つの流体を導管手段内に置くように前記ポンプ手段に命令するポンプ制御手段を備えている、請求項45に記載の装置。
【請求項48】
前記バルブ手段が、第1の位置および第2の位置を有する試料注入手段であり、前記第1の位置では、前記試料注入手段が、大気圧から前記低圧までを含む圧力範囲で流体試料を受け、前記第2の位置では、前記試料注入手段が、前記流体試料を前記導管手段内に配置するように前記導管手段と流体連通している、請求項45に記載の装置。
【請求項49】
さらに前記試料注入手段を備えた装置であって、前記試料注入手段が、前記試料手段内に圧力を配置するように圧力源で流体制御しており、前記圧力源が、制御手段と信号通信しており、前記制御手段が前記試料注入手段を大気圧、または前記試料を受けるための初期圧力に、また前記試料を受けた後に前記導管手段内の選択したパラメータに対応する前記低圧まで大きくするように前記圧力源に命令する、請求項48に記載の装置。
【請求項50】
前記制御手段と信号通信し、前記ポンプ手段、導管手段およびバルブ手段の少なくとも1つと流体連通する少なくとも1つの圧力センサをさらに備えた、請求項45に記載の装置。
【請求項51】
さらにポンプ手段を備えた装置であって、前記ポンプ手段が少なくとも第1の溶媒用の第1のポンプ、および第2の溶媒用の第2のポンプを備えており、前記導管手段が前記第1のポンプと流体連通する少なくとも1つの第1のブランチと、前記第2のポンプと流体連通する第2のブランチとを備えており、前記第1のブランチおよび第2のブランチが、T字接続金具で流体連通しており、前記第1の溶媒および第2の溶媒が、前記流体を含む混合物を形成する、請求項45に記載の装置。
【請求項52】
前記第1および第2のポンプから選択された少なくとも1つのポンプが圧力に対して傾斜されており、少なくとも1つのポンプが圧力に対して傾斜されたポンプの流量を追跡するように制御されている、請求項51に記載の装置。
【請求項53】
圧力に対して傾斜されたポンプの流量を追跡するように制御された前記ポンプがさらに、汲み上げられている前記溶媒の圧縮または未圧縮量を補償する、請求項52に記載の装置。
【請求項54】
前記圧力に対して傾斜されたポンプが、水性溶媒用である、請求項51に記載の装置。
【請求項55】
前記流れに対して傾斜されたポンプが、有機溶媒用である、請求項51に記載の装置。
【請求項56】
前記制御手段と信号通信しており、前記ポンプ手段、導管手段およびバルブ手段の少なくとも1つと流体連通している、少なくとも1つの流れセンサをさらに備えた、請求項45に記載の装置。
【請求項57】
少なくとも1つの傾斜が、約10,000ポンド毎平方インチ(psi)毎秒以下の斜面を有する、請求項45に記載の装置。
【請求項58】
前記少なくとも1つの傾斜が、10から1,000psi毎秒の範囲の斜面を有する、請求項45に記載の装置。
【請求項59】
前記少なくとも1つの傾斜が、10から100、500psi毎秒の範囲の斜面を有する、請求項45に記載の装置。
【請求項60】
少なくとも1つの作動圧力および1つの低圧を含む、圧力および流れの範囲において導管手段内で運ばれている流体流の完全性を維持する方法でにして、前記導管手段が圧力を受けて前記流体を推進させるポンプ手段と流体連通しており、前記導管手段がバルブ手段と流体連通しており、前記バルブ手段が少なくとも第1の位置および第2の位置を有し、前記第1の位置では、前記流体が前記導管手段内で流れ、前記第2の位置では、流体が前記導管手段内に流れない方法であって、
前記導管手段内の圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するステップを含む方法であって、
前記リニアバルブが、
(i)前記第2の位置への前記バルブ手段の配置または予測配置に応じて、前記導管手段が前記1つまたは複数の作動圧力にある間に、前記低圧が得られるまで前記制御手段が前記導管手段における前記選択パラメータを減少させるように前記リニアバルブに命令する、および
(ii)前記第1の位置をとる前記バルブ手段に応じて、または前記第1の位置をとる前記バルブ手段を予期して、前記導管手段が前記低圧において前記1つまたは複数の作動圧力が第2の斜面で得られるまで前記導管手段内の前記選択パラメータを増加させる、または
(iii)流体の完全性が維持されるように、(i)および(ii)の両方を行う、方法。
【請求項61】
グラジエントを作り出す注入バルブと、
注入バルブと流体連通している分析カラムと、
グラジエントを分析カラムに向かって押し込むように注入バルブに連結されたポンプと、
グラジエントを貯蔵するための注入バルブと分析カラムの間にある装置とを備えた、LC機器。
【請求項62】
グラジエント貯蔵装置が、毛細配管の一部である、請求項61に記載のLC機器。
【請求項63】
毛細配管の一部が、充填マトリックスを含んでいる、請求項62に記載のLC機器。
【請求項64】
試料装填時間を短くするように極めて高い流量を使用して、グラジエントの装填と同時に試料が注入される、請求項61に記載のLC機器。
【請求項65】
グラジエント貯蔵装置と分析カラムの間に連結された通気バルブをさらに備えた、請求項61に記載のLC機器。
【請求項66】
ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第1の行程と、
ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第2の行程と、
変換器からの信号に基づいて各ポンプに指示を与えるコントローラと、
第1および第2の行程からの出力を混合するノードとを備えたLC機器であって、
コントローラが、ノードにわたって組成制御を維持するために、エネルギーを蓄積して第1および第2の行程内の流体の圧縮性を保存する第1および第2の行程の能力に基づいて、第1および第2のポンプにフィードフォワード信号を提供することができる、LC機器。
【請求項67】
作動圧力への傾斜中に、コントローラが、フィードフォワード信号がそれぞれのポンプに関連するパラメータにのみに基づいている状態で、圧力モードで第1の行程を作動させ、
コントローラが、フィードフォワード信号が、それぞれのポンプ、圧力変換器、流量変換器および負荷に関連するパラメータに基づいた状態で、フィードフォワードモードで第2の行程を作動させる、請求項66に記載のLC機器。
【請求項68】
負荷が実質的に、注入バルブの捕捉カラムおよび試料ループの容量である、請求項66に記載のLC機器。
【請求項1】
貯蔵毛細管を充填するポンプを有する液体クロマトグラフィシステムにグラジエントを形成する方法であって、
貯蔵毛細管を大気に通気させるステップと、
グラジエントが中に形成されるまで貯蔵毛細管を充填するように比較的低い圧力およびより高い流量でポンプを運転させるステップとを含む、方法。
【請求項2】
比較的低い圧力が約100psiであり、比較的より高い流量が通常のクロマトグラフィ流量の約15倍である、請求項1に記載の方法。
【請求項3】
貯蔵毛細管の幾何形状が、グラジエントに対する容量を達成し、背圧およびグラジエント分散の形成を最小限に抑えるような長さおよび内径の寸法をしている、請求項1に記載の方法。
【請求項4】
貯蔵毛細管の容量が、グラジエントおよびグラジエントを分離カラムに移動させるのに必要な輸送容量のオーバーヘッドに対応するような寸法をしている、請求項3に記載の方法。
【請求項5】
ポンプが、水性ポンプおよび有機ポンプを含んでおり、前記水性および有機ポンプがそれぞれ、ポンプと貯蔵毛細管の間で混合ノードに連結されている出力を有する、請求項1に記載の方法。
【請求項6】
さらに、有機ポンプをオフラインにするステップと、
貯蔵毛細管を大気から閉じるステップと、
グラジエントを分離カラムに送液するように水性ポンプを運転させるステップとを含む、請求項5に記載の方法。
【請求項7】
閉じるステップが、貯蔵毛細管の上流側に連結されたバルブによって達成される、請求項6に記載の方法。
【請求項8】
さらに、混合ノードにわたるクロス汚染を防ぐようにグラジエント形成の前に、ポンプを運転させて廃棄するステップを含む、請求項5に記載の方法。
【請求項9】
さらに、混合ノードにわたるクロス汚染を防ぐようにゼロ流に設定された有機ポンプを運転させるステップを含む、請求項5に記載の方法。
【請求項10】
別のグラジエントを形成するために待機中の貯蔵毛細管をパージするために、バルブを開き、ポンプの少なくとも1つを運転させるステップをさらに含む、請求項1に記載の方法。
【請求項11】
グラジエントをナノ流毛細管液体クロマトグラフィ装置に与えるシステムであって、
第1の出力を作り出す水性ポンプと、
溶液を作り出す第1の出力と混合された第2の出力を作り出す有機ポンプと、
ポンプを制御する処理装置と、
溶液の一部からグラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、ナノ流毛細管液体クロマトグラフィ装置に接続された第1の出口、および第2の出口を形成する接続金具と、
第2の出口に連結し、貯蔵毛細管内でのグラジエントの形成中に、水性および有機ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御されたバルブとを備えた、システム。
【請求項12】
ナノ流毛細管液体クロマトグラフィ装置へのグラジエントの送液中に、バルブが閉じられ、水性ポンプが運転し、有機ポンプがオフラインである、請求項11に記載のシステム。
【請求項13】
さらに、第1の出力を受ける第1のインライン圧力変換器および第1の流量変換器と、
第2の出力を受ける第2のインライン圧力変換器および第2の流量変換器とを有するシステムであって、
各変換器が、閉ループフィードバック制御を行うように処理装置と通信している、請求項11に記載のシステム。
【請求項14】
貯蔵毛細管が、形成されたグラジエントの完全性を保持するために背圧および分散を最小限に抑えるような寸法をしている、請求項11に記載のシステム。
【請求項15】
第1および第2の出力を1つの流体流に混合する流体組合せ接続金具をさらに備えた、請求項11に記載のシステム。
【請求項16】
ナノ流毛細管液体クロマトグラフィ装置が、分離カラムと、グラジエントを受け、グラジエントを分離カラムに案内するインジェクタと、分離カラムおよびインジェクタを格納する熱管理区画とを備え、貯蔵毛細管、接続金具およびバルブが熱管理区画内に同一配置されている、請求項11に記載のシステム。
【請求項17】
ナノ流毛細管液体クロマトグラフィ装置の試料インジェクタに接続金具を連結させる輸送ラインをさらに備えた、請求項11に記載のシステム。
【請求項18】
輸送ラインが毛細管である、請求項17に記載のシステム。
【請求項19】
液体クロマトグラフィ(LC)装置用溶媒送液サブシステムであって、
第1の出力を作り出す第1のポンプと、
そのパラメータを監視するために第1の出力を受けるように接続された第1の変換器と、
第2の出力を作り出す第2のポンプと、
そのパラメータを監視するために第2の出力を受けるように接続された第2の変換器と、
第1および第2の出力を組み合わせる混合ノードと、
第1と第2のポンプの間の受動流体分離を行って混合ノードにわたる相互作用を安定化させて抑止を行うように、各ポンプと混合ノードの間に導管とを備えた、溶媒送液サブシステム。
【請求項20】
導管が容量を少なくするための毛細管リストリクタである、請求項19に記載の溶媒送液サブシステム。
【請求項21】
導管が、第1および第2の変換器の下流側に設けられている、請求項19に記載の溶媒送液サブシステム。
【請求項22】
第1および第2の変換器が流量変換器である、請求項19に記載の溶媒送液サブシステム。
【請求項23】
第1および第2の変換器からのフィードバック信号を使用することによって、第1および第2のポンプを制御する処理装置をさらに備えた、請求項19に記載の溶媒送液サブシステム。
【請求項24】
混合ノードの出力からグラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、LC装置に接続された第1の出口、および第2の出口を形成する接続金具と、
第2の出口に連結し、貯蔵毛細管内でのグラジエントの形成中に、ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御されたバルブとをさらに備えた、請求項23に記載の溶媒送液サブシステム。
【請求項25】
試料を分離カラム内に案内するインジェクタを有する液体クロマトグラフィ装置にグラジエントを送液するシステムであって、
第1のインライン圧力変換器および第1の流量変換器を通して案内される水性出力を作り出す水性ポンプを有する第1の行程と、
第2のインライン圧力変換器および第2の流量変換器を通して案内される有機出力を作り出す有機ポンプを有する第2の行程と、
変換器の少なくとも1つの上流側で寄生損失を克服するように変換器の少なくとも1つからの測定信号から導き出された誤差に基づいて、修正制御信号を発生させる閉ループフィードバックモードおよび、システムの蓄積エネルギーのパラメータに基づいて予測制御信号を発生させる開ループフィードフォワードモードを含んだ、各行程の流体流を制御する処理装置を含み、予測制御信号が水性出力と有機出力の間の圧縮比に基づき圧縮流を算出し、処理装置が異なるモードで各行程を選択的に操作することができる、システム。
【請求項26】
第3の出力を作り出すように第1および第2の出力を混合する第1の接続金具と、
グラジエントが第3の出力の一部を含み、貯蔵毛細管が背圧および分散を最小限に抑えるような寸法をしている、グラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、ナノ流毛細管液体クロマトグラフィ装置に連結された第1の出口および第2の出口を形成する第2の接続金具と、
第2の出口に連結されたバルブとを備えた、請求項25に記載のシステム。
【請求項27】
貯蔵毛細管内にグラジエントを形成する際に、水性および有機ポンプが運転している間に、バルブが開いて留まっている流体を案内して廃棄する、および
ナノ流毛細管液体クロマトグラフィ装置にグラジエントを送液する際に、水性ポンプのみが運転し、有機ポンプがオフラインであるように、バルブが処理装置によって制御されている、請求項26に記載のシステム。
【請求項28】
液体クロマトグラフィ装置内のグラジエントの送液の作動流量を変えるシステムであって、
a)圧力変換器および流量変換器を通して案内される出力を作り出すポンプと、
b)出力の一部からグラジエントを形成する貯蔵毛細管と、
c)ポンプを制御して、変換器から信号を受ける処理装置であって、ポンプ内のヘッドの容量および出力の圧縮性に基づいて、ポンプに修正フィードフォワード信号を与える処理装置とを備えた、システム。
【請求項29】
処理装置がさらに、
i)指示セットを記憶するメモリ、および
ii)メモリと通信している、指示セットを実行するプロセッサを備え、
プロセッサが、
(1)ナノ流毛細管クロマトグラフィ装置の第2のカラムが再平衡された場合に、注入の最後に圧力変換器からのシステム圧力測定値を記憶し、
(2)ナノ流毛細管クロマトグラフィ装置への流れを止め、
(3)第1のカラムに特に適合された新しいグラジエントを形成し、
(4)目標圧力をシステム圧力測定値と等しくなるように設定し、
(5)第1のカラムに対してユーザによって選択された流量を受けるおよび記憶し、
(6)圧力変換器からフィードバックでの閉ループ圧力制御においてポンプを使用して、システム圧力を第1の目標圧力にし、
(7)第1の目標圧力に到達する際に流量変換器をフィードバックとしてまた流量を目標流量として閉ループ流制御にポンプを移行し、
(8)ポンプを運転することによって新しいグラジエントの送液を再開するように動作可能である、請求項28に記載のシステム。
【請求項30】
さらに、第2の圧力変換器および第2の流量変換器を通して案内された出力を作り出す第2のポンプと、
ポンプの出力を組み合わせるように貯蔵毛細管に連結された混合ノードとを備えた、請求項29に記載のシステム。
【請求項31】
貯蔵毛細管に連結され、貯蔵毛細管を通気させるバルブをさらに備えた、請求項29に記載のシステム。
【請求項32】
プロセッサが、バルブがシステムの開口圧力より下の圧力に貯蔵毛細管に通気させるように、バルブを制御する、請求項29に記載のシステム。
【請求項33】
抑制カラムと直列な短い捕捉カラムを有するクロマトグラフィ装置用の溶媒送液システムであって、
a)第1の出力を作り出す第1のポンプと、
b)第1の出力を受けるように連結された圧力変換器および流量変換器と、
c)溶媒混合物を作り出すように、第1の出力と混合された第2の出力を作り出す第2のポンプと、
d)そのパラメータを監視するために第2の出力を受けるように連結されている第2の圧力変換器および第2の流量変換器と、
e)第1および第2の出力を組み合わせる混合ノードと、
f)閉ループフィードバックでポンプを作動させるコントローラとを備えた溶媒送液システムであって、
コントローラが、
i)圧力制御モードで閉ループフィードバックに圧力変換器を使用し、
ii)流れ制御モードで閉ループフィードバックに流量変換器を使用し、
iii)グラジエントを形成するように流れ制御モードで両方のポンプを使用し、
iv)グラジエントを送液するように第1のポンプのみを使用し、
v)圧力制御モードを使用して抑制カラムと直列な短い捕捉カラムを迅速に減圧することによって流れを止め、
vi)基準圧力設定点をゼロに設定し、
vii)抑制カラムと直列な短い捕捉カラムの長時定数を乗り越えるために第1のポンプの動作を開始するようにプログラミングされている、溶媒送液システム。
【請求項34】
第1のポンプが、グラジエントを送液する場合に流れ制御モードである、請求項33に記載の溶媒送液システム。
【請求項35】
グラジエントを受ける貯蔵毛細管をさらに備えた、請求項33に記載の溶媒送液システム。
【請求項36】
第1と第2のポンプの間の受動流体分離を行って混合ノードにわたる相互作用を安定化させるように、各ポンプと混合ノードの間に導管をさらに備えた、請求項33に記載の溶媒送液システム。
【請求項37】
グラジエントの形成中に試料捕捉を行うように、短い捕捉カラムに連結された補助試料マネージャをさらに備えた、請求項33に記載の溶媒送液システム。
【請求項38】
試料装填を行うように注入バルブに連結された針をさらに備えた、請求項33に記載の溶媒送液システム。
【請求項39】
液体クロマトグラフィシステム内のピークパーキング方法であって、
混合物からグラジエントを予備成形するステップと、
閉ループフィードバックに流量変換器を使用することによって流量を制御するステップと、
圧力変換器を使用することによって送液圧力を監視するステップと、
運搬圧力、および関心のある溶出ピークに基づいて流量を少なくする信号に基づき、目標圧力を算出するステップと、
目標圧力を設定点とした閉ループフィードバックとして圧力変換器を使用することによって、流量を制御するように切り換えるステップとを含む、方法。
【請求項40】
さらに送液圧力を記憶するステップと、
記憶した送液圧力を使用することによって、送液流れを制御することに戻るステップとを含む、請求項39に記載の方法。
【請求項41】
目標圧力を算出するステップが、抑制負荷Rに基づいている、請求項39に記載の方法。
【請求項42】
a)クロマトグラムを生成する分離カラムを有する分析サブシステムと、
b)グラジエントを形成し、分析サブシステムにグラジエントを送液する溶媒送液システムとを備えた、ナノ流毛細管液体クロマトグラフィシステムであって、
溶媒送液システムが、第1の出力を作り出す水性ポンプと、
溶液を作り出す第1の出力と混合された第2の出力を作り出す有機ポンプと、
ポンプを制御する処理装置と、
溶液の一部からグラジエントを形成する貯蔵毛細管と、
貯蔵毛細管に連結され、ナノ流毛細管液体クロマトグラフィ装置に接続された第1の出口、および第2の出口を形成する接続金具と、
第2の出口に連結し、貯蔵毛細管内でのグラジエントの形成中に、水性および有機ポンプが運転している間にバルブが開かれて留まっている流体を廃棄するように、処理装置によって制御されたバルブとを備えている、ナノ流毛細管液体クロマトグラフィシステム。
【請求項43】
ナノ流毛細管液体クロマトグラフィ装置へのグラジエントの送液中に、バルブが閉じられ、水性ポンプが運転し、有機ポンプがオフラインである、請求項42に記載のナノ流毛細管液体クロマトグラフィシステム。
【請求項44】
さらに、第1の出力を受ける第1のインライン圧力変換器および第1の流量変換器と、
第2の出力を受ける第2のインライン圧力変換器および第2の流量変換器とを備えたナノ流毛細管液体クロマトグラフィシステムであって、
各変換器が、処理装置と通信している、請求項43に記載のナノ流毛細管液体クロマトグラフィシステム。
【請求項45】
少なくとも1つの作動圧力および1つの低圧を含む、圧力および流れの範囲において導管手段内で運ばれている流体流の完全性を維持する装置にして、前記導管手段が圧力を受けて前記流体を推進させるポンプ手段と流体連通しており、前記導管手段がバルブ手段と流体連通しており、前記バルブ手段が少なくとも第1の位置および第2の位置を有し、前記第1の位置では、前記流体が前記導管手段内で流れ、前記第2の位置では、流体が前記導管手段内に流れない装置であって、
前記バルブ手段と信号通信し、リニアバルブと信号通信している制御手段と、
前記導管内の圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するリニアバルブを備え、前記リニアバルブが
(i)前記第2の位置への前記バルブ手段の配置または予測配置に応じて、前記導管手段が前記1つまたは複数の作動圧力にある間に、前記低圧が得られるまで前記制御手段が第1の傾斜にある前記導管手段における前記選択パラメータを減少させるように前記リニアバルブに命令する、および
(ii)前記第1の位置をとる前記バルブ手段に応じて、または前記第1の位置をとる前記バルブ手段を予期して、前記導管手段が前記低圧において前記1つまたは複数の作動圧力が第2の斜面で得られるまで前記導管手段内の前記選択パラメータを増加させる、または
(iii)流体の完全性が維持されるように、(i)および(ii)の両方を行うリニアバルブとを備えた、装置。
【請求項46】
前記リニアバルブが、ある範囲の開口を有し、前記導管手段内の前記選択したパラメータを小さくおよび大きくすることが可能であるリニアバルブである、請求項45に記載の装置。
【請求項47】
前記リニアバルブ27が、前記第1の斜面または第2の斜面の少なくとも1つにおいて前記選択したパラメータにより、前記少なくとも1つの流体を導管手段内に置くように前記ポンプ手段に命令するポンプ制御手段を備えている、請求項45に記載の装置。
【請求項48】
前記バルブ手段が、第1の位置および第2の位置を有する試料注入手段であり、前記第1の位置では、前記試料注入手段が、大気圧から前記低圧までを含む圧力範囲で流体試料を受け、前記第2の位置では、前記試料注入手段が、前記流体試料を前記導管手段内に配置するように前記導管手段と流体連通している、請求項45に記載の装置。
【請求項49】
さらに前記試料注入手段を備えた装置であって、前記試料注入手段が、前記試料手段内に圧力を配置するように圧力源で流体制御しており、前記圧力源が、制御手段と信号通信しており、前記制御手段が前記試料注入手段を大気圧、または前記試料を受けるための初期圧力に、また前記試料を受けた後に前記導管手段内の選択したパラメータに対応する前記低圧まで大きくするように前記圧力源に命令する、請求項48に記載の装置。
【請求項50】
前記制御手段と信号通信し、前記ポンプ手段、導管手段およびバルブ手段の少なくとも1つと流体連通する少なくとも1つの圧力センサをさらに備えた、請求項45に記載の装置。
【請求項51】
さらにポンプ手段を備えた装置であって、前記ポンプ手段が少なくとも第1の溶媒用の第1のポンプ、および第2の溶媒用の第2のポンプを備えており、前記導管手段が前記第1のポンプと流体連通する少なくとも1つの第1のブランチと、前記第2のポンプと流体連通する第2のブランチとを備えており、前記第1のブランチおよび第2のブランチが、T字接続金具で流体連通しており、前記第1の溶媒および第2の溶媒が、前記流体を含む混合物を形成する、請求項45に記載の装置。
【請求項52】
前記第1および第2のポンプから選択された少なくとも1つのポンプが圧力に対して傾斜されており、少なくとも1つのポンプが圧力に対して傾斜されたポンプの流量を追跡するように制御されている、請求項51に記載の装置。
【請求項53】
圧力に対して傾斜されたポンプの流量を追跡するように制御された前記ポンプがさらに、汲み上げられている前記溶媒の圧縮または未圧縮量を補償する、請求項52に記載の装置。
【請求項54】
前記圧力に対して傾斜されたポンプが、水性溶媒用である、請求項51に記載の装置。
【請求項55】
前記流れに対して傾斜されたポンプが、有機溶媒用である、請求項51に記載の装置。
【請求項56】
前記制御手段と信号通信しており、前記ポンプ手段、導管手段およびバルブ手段の少なくとも1つと流体連通している、少なくとも1つの流れセンサをさらに備えた、請求項45に記載の装置。
【請求項57】
少なくとも1つの傾斜が、約10,000ポンド毎平方インチ(psi)毎秒以下の斜面を有する、請求項45に記載の装置。
【請求項58】
前記少なくとも1つの傾斜が、10から1,000psi毎秒の範囲の斜面を有する、請求項45に記載の装置。
【請求項59】
前記少なくとも1つの傾斜が、10から100、500psi毎秒の範囲の斜面を有する、請求項45に記載の装置。
【請求項60】
少なくとも1つの作動圧力および1つの低圧を含む、圧力および流れの範囲において導管手段内で運ばれている流体流の完全性を維持する方法でにして、前記導管手段が圧力を受けて前記流体を推進させるポンプ手段と流体連通しており、前記導管手段がバルブ手段と流体連通しており、前記バルブ手段が少なくとも第1の位置および第2の位置を有し、前記第1の位置では、前記流体が前記導管手段内で流れ、前記第2の位置では、流体が前記導管手段内に流れない方法であって、
前記導管手段内の圧力および流れからなる群から選択した少なくとも1つのパラメータを制御するステップを含む方法であって、
前記リニアバルブが、
(i)前記第2の位置への前記バルブ手段の配置または予測配置に応じて、前記導管手段が前記1つまたは複数の作動圧力にある間に、前記低圧が得られるまで前記制御手段が前記導管手段における前記選択パラメータを減少させるように前記リニアバルブに命令する、および
(ii)前記第1の位置をとる前記バルブ手段に応じて、または前記第1の位置をとる前記バルブ手段を予期して、前記導管手段が前記低圧において前記1つまたは複数の作動圧力が第2の斜面で得られるまで前記導管手段内の前記選択パラメータを増加させる、または
(iii)流体の完全性が維持されるように、(i)および(ii)の両方を行う、方法。
【請求項61】
グラジエントを作り出す注入バルブと、
注入バルブと流体連通している分析カラムと、
グラジエントを分析カラムに向かって押し込むように注入バルブに連結されたポンプと、
グラジエントを貯蔵するための注入バルブと分析カラムの間にある装置とを備えた、LC機器。
【請求項62】
グラジエント貯蔵装置が、毛細配管の一部である、請求項61に記載のLC機器。
【請求項63】
毛細配管の一部が、充填マトリックスを含んでいる、請求項62に記載のLC機器。
【請求項64】
試料装填時間を短くするように極めて高い流量を使用して、グラジエントの装填と同時に試料が注入される、請求項61に記載のLC機器。
【請求項65】
グラジエント貯蔵装置と分析カラムの間に連結された通気バルブをさらに備えた、請求項61に記載のLC機器。
【請求項66】
ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第1の行程と、
ポンプからの圧力および流れ出力を監視するポンプおよび変換器を有する第2の行程と、
変換器からの信号に基づいて各ポンプに指示を与えるコントローラと、
第1および第2の行程からの出力を混合するノードとを備えたLC機器であって、
コントローラが、ノードにわたって組成制御を維持するために、エネルギーを蓄積して第1および第2の行程内の流体の圧縮性を保存する第1および第2の行程の能力に基づいて、第1および第2のポンプにフィードフォワード信号を提供することができる、LC機器。
【請求項67】
作動圧力への傾斜中に、コントローラが、フィードフォワード信号がそれぞれのポンプに関連するパラメータにのみに基づいている状態で、圧力モードで第1の行程を作動させ、
コントローラが、フィードフォワード信号が、それぞれのポンプ、圧力変換器、流量変換器および負荷に関連するパラメータに基づいた状態で、フィードフォワードモードで第2の行程を作動させる、請求項66に記載のLC機器。
【請求項68】
負荷が実質的に、注入バルブの捕捉カラムおよび試料ループの容量である、請求項66に記載のLC機器。
【図1A】

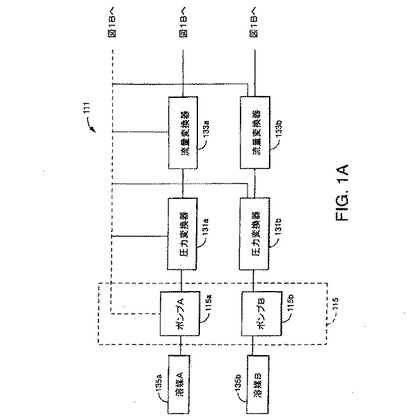
【図1B】
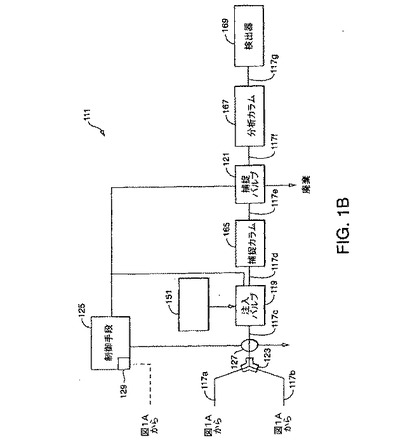
【図2】
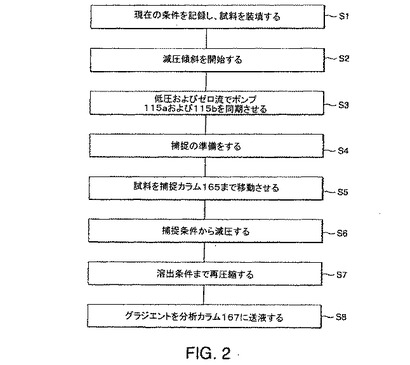
【図3】
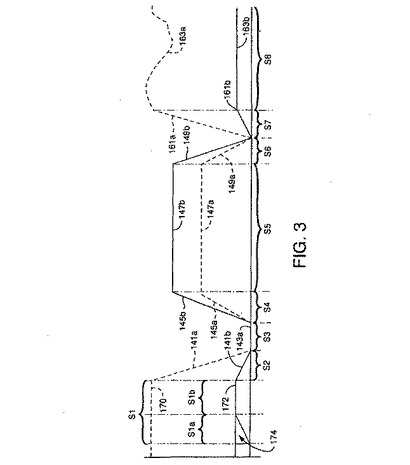
【図4A】
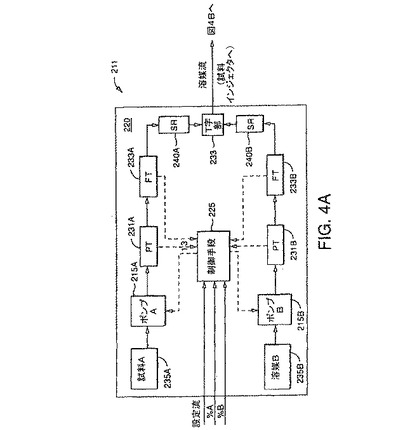
【図4B】
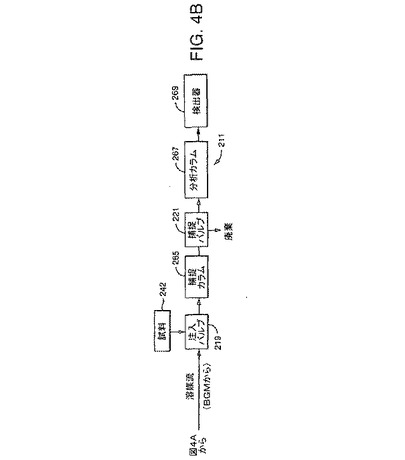
【図5】
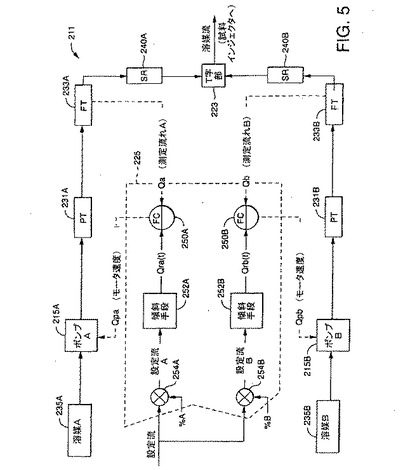
【図6】
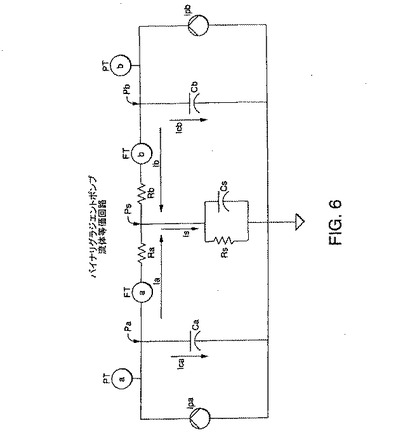
【図7】
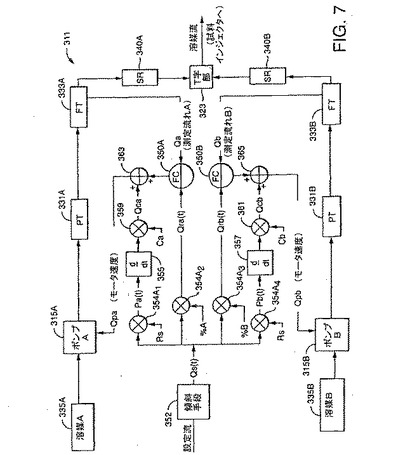
【図8】
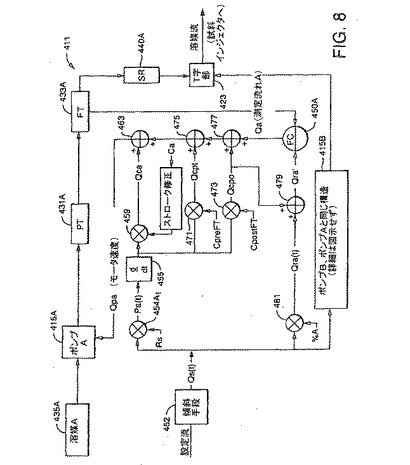
【図9】
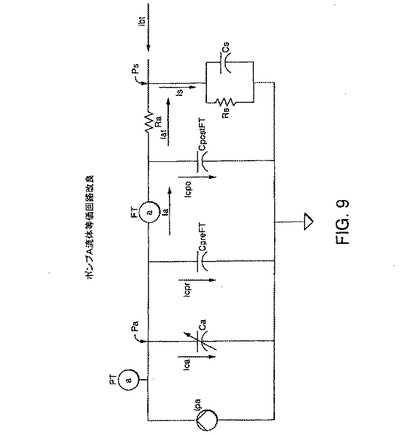
【図10】
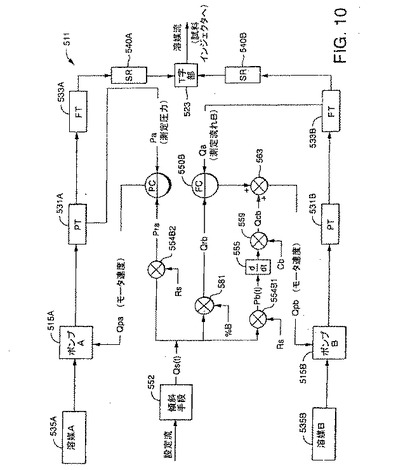
【図11】
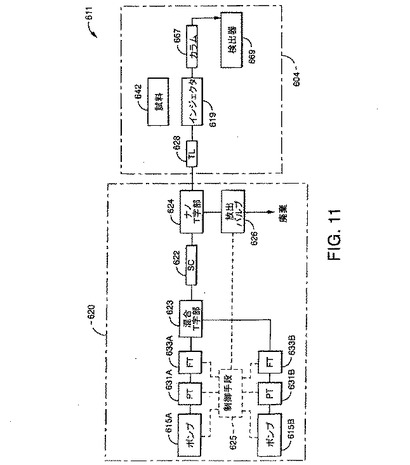
【図12】
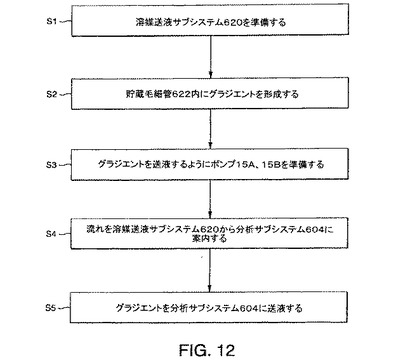
【図13】
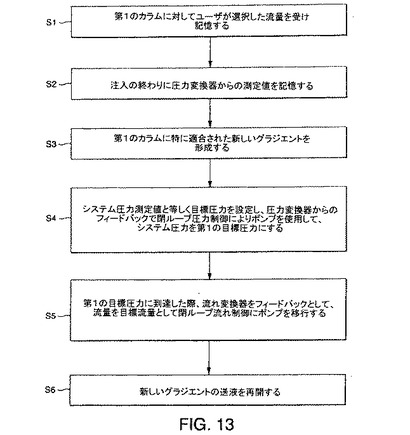
【図14】
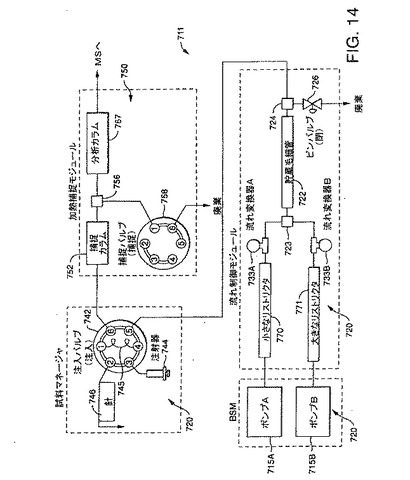
【図15】
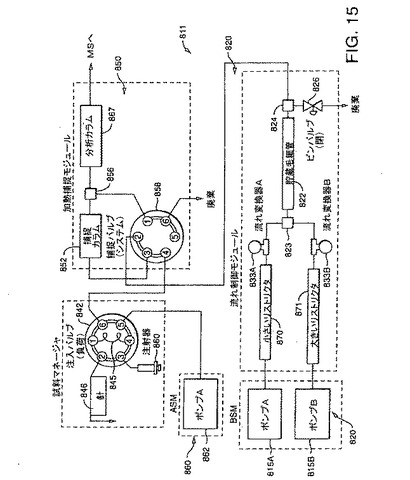
【図16】
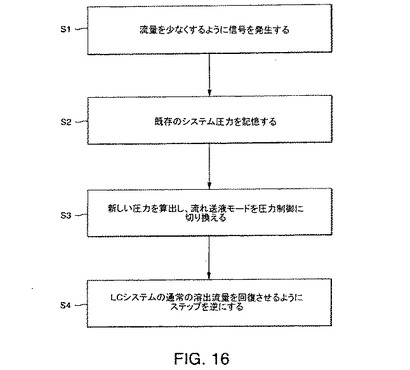
【図17】

【図18】
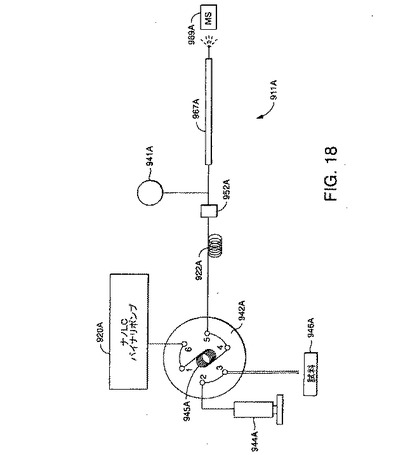
【図19】
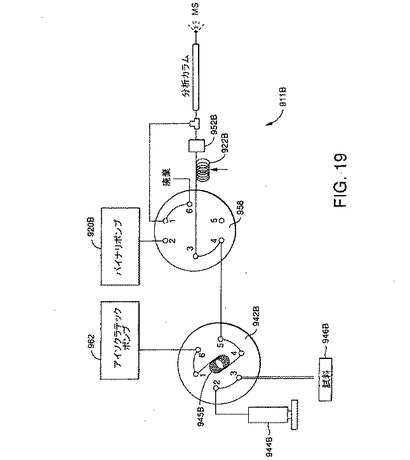
【図1B】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公表番号】特表2009−530615(P2009−530615A)
【公表日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2009−500516(P2009−500516)
【出願日】平成19年3月16日(2007.3.16)
【国際出願番号】PCT/US2007/006679
【国際公開番号】WO2007/109157
【国際公開日】平成19年9月27日(2007.9.27)
【出願人】(504438255)ウオーターズ・インベストメンツ・リミテツド (80)
【公表日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成19年3月16日(2007.3.16)
【国際出願番号】PCT/US2007/006679
【国際公開番号】WO2007/109157
【国際公開日】平成19年9月27日(2007.9.27)
【出願人】(504438255)ウオーターズ・インベストメンツ・リミテツド (80)
[ Back to top ]