
流体輸送を制御するシステム及び方法
可動式流体輸送機(106)を使用して現場(100)に流体を輸送するシステム及び方法が開示される。本方法は、現場での可動式流体輸送機の位置を特定すること、及び現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定することを含む。本方法は、決定された流体輸送率で、可動式流体輸送機の位置での現場表面に流体を輸送することをさらに含む。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は、一般的には流体輸送システム及び方法に関し、より詳細には流体輸送を制御して輸送するシステム及び方法に関する。
【背景技術】
【0002】
採掘業界及び建築業界等の特定の業界に関連する作業環境は、望ましくない埃状況を受けやすい。例えば、採掘、掘削、建築、埋め立て、及び材料貯蔵に関連する作業現場は、作業現場表面を構成する物質の性質により、埃の影響を特に受けやすい場合がある。例えば、石炭、頁岩、岩等の作業現場表面は容易に浸食されるため、大量の埃を生じさせる傾向を有し得る。さらに、これらの現場で実行される典型的な作業オペレーションは、埃状況を悪化させるだけである。採掘現場では、例えば、切断動作、掘削動作、及び削り取り動作が、作業現場表面を破壊し、埃を生じさせ得る。加えて、そのような現場を移動する運搬トラック、ブルドーザー、ローダー、掘削機等の重機は、降下した埃をかき乱し、それにより、空気中の埃レベルを増大させ得る。
【0003】
不適切な埃状況は、作業現場での効率を低減するおそれがある。例えば、埃は視界を損ない、現場での作業オペレーションを邪魔し、機器の保守及び清掃の増大を必要とし得る。加えて、不適切な埃状況は、作業現場の人員の快適性、健康、及び安全性を損なうおそれがある。
【0004】
過去において、様々な装置及び方法が、作業現場の埃状況を制御するために使用されてきた。例えば、Carter,Jr等への(特許文献1)(’719号特許)には、作業現場埃状況に対処する方法及びシステムが開示されている。特に、’719号特許には、作業現場のあちこちの異なる位置に位置決めされた1つ又は複数のダストモニタを含むシステムを開示している。ダストモニタは、作業現場の各位置での埃レベルを監視し、監視された埃レベルを示す埃制御信号を生成する。システムに関連付けられたコントローラが、ダストモニタから信号を受信する。コントローラにより、特定のダストモニタの位置での埃レベルが閾値を超えて増大すると判断される場合、コントローラは信号を送信して、可動式埃制御機をそのダストモニタの位置に派遣し、埃状況に対処する(例えば、撒水及び/又は埃抑制)。
【0005】
’719号特許の埃制御システムは、作業現場での埃レベルの制御に役立ち得るが、このシステムはある意味で非効率的であり得る。例えば、このシステムは、作業現場の特定の位置で撒かれる水の量を監視又は制御することができない。したがって、このシステムは、埃レベル、環境要因、及び他の考慮事項に関係なく、各埃位置で同じように対処し得る。したがって、埃制御資源が、所望よりも非効率的に使用されるおそれがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第6,954,719号明細書
【特許文献2】米国特許出願第12/472,415号明細書
【発明の概要】
【0007】
本開示は、上述した1つ若しくは複数の欠点及び/又は当分野の他の問題を解消することに関する。
【0008】
一態様は、可動式流体輸送車両を使用して現場に流体を輸送する方法に関する。方法は、現場での可動式流体輸送機の位置を特定すること、及び現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定することを含み得る。方法は、決定された流体輸送率で、現場表面の可動式流体輸送機の位置に流体を輸送することをさらに含み得る。
【0009】
別の態様は、流体を現場に輸送する可動式流体輸送機に関する。可動式流体輸送機は、現場での可動式流体輸送機の位置を特定するように構成された位置特定装置と、現場に関連する情報を記憶する現場データベースと、フローコントローラとを含み得る。フローコントローラは、現場に関連する情報を使用して、現場での可動式流体輸送機の位置に基づいて流体輸送率を決定し、決定された流体輸送率に基づいてフロー制御信号を生成するように構成し得る。流体輸送機は、フロー制御信号に基づいて、決定された流体輸送率で現場の表面に流体を噴霧するように構成された流体輸送システムをさらに含み得る。
【0010】
別の態様は、可動式流体輸送機を使用して現場に流体を輸送する別の方法に関する。方法は、現場での可動式流体輸送機の位置を受信し、現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定し、決定された流体輸送率に基づいてフロー制御信号を生成し得る。方法は、フロー制御信号を可動式流体輸送機に送信することをさらに含み得る。
【0011】
さらに別の態様は、可動式流体輸送機を使用して現場に流体を輸送する流体輸送システムに関する。システムは、現場での可動式流体輸送機の位置を示す信号を受信する通信装置と、現場に関連する情報を記憶する現場データベースと、フローコントローラとを含み得る。フローコントローラは、現場に関連する情報を使用して、現場での可動式流体輸送機の位置に基づいて流体輸送率を決定し、決定された流体輸送率に基づいてフロー制御信号を生成し、通信装置を介してフロー制御信号を可動式流体輸送機を送信するように構成し得る。
【図面の簡単な説明】
【0012】
【図1】開示される流体輸送プロセスを利用し得る例示的な作業現場の表現である。
【図2】開示される実施形態による例示的な可動式流体輸送機の表現である。
【図3】開示される実施形態による図2の可動式流体輸送機に関連する例示的な流体輸送制御システムの表現である。
【図4】開示される実施形態による図3の流体輸送制御システムに関連する例示的な流体輸送システムの表現である。
【図5】開示される実施形態による図3の流体輸送制御システムに関連する例示的な流体制御システムの表現である。
【図6】開示される実施形態による図5のフロー制御システムに関連する流体輸送情報データベースの例示的な内容の表現である。
【図7】開示される実施形態による図5のフロー制御システムに関連する作業現場情報データベースの例示的な内容の表現である。
【図8】開示される実施形態による図5に示されるフロー制御システムにより実行される例示的な流体輸送プロセスを示すフローチャートである。
【発明を実施するための形態】
【0013】
図1は、開示される流体輸送プロセスを利用し得る例示的な作業現場100を示す。一環境では、作業現場100は、採掘オペレーションが、作業現場人員に困難な状況を生み出す大きな埃レベルを生成する表面採掘現場を含み得る。例えば、埃は、視界を損ない、空気の質を低減し、機器の頻繁な保守及び清掃を必要とし、又はその他の様式でオペレーション作業現場100を妨害し得る。しかし、作業現場100が代替として、建築現場、埋め立て地、戦場ゾーン、地下作業現場、又は望ましくない埃状況が生じ得る他の任意の種類の作業現場を含み得ることを理解されたい。
【0014】
図1に示されるように、様々な可動機102が作業現場100で動作し得る。可動機102は、自律(すなわち、無人の)機械、半自律機械、又はオペレータ制御される機械の任意の組み合わせを含み得る。可動機102は、例えば、オフハイウェイ運搬トラック、連結トラック、掘削機、ローダー、ブルドーザー、スクレーパー、又は作業現場100を掘削若しくは関連する作業現場100からの物質を取り扱う他の種類の土木作業機械を含み得る。様々な作業オペレーションに関連して、可動機102は、運搬路104又は掘削位置間、投棄領域間、及び作業現場100の他の行先間の他の経路に沿って移動し得る。土木作業機械及び他のそのような重機の他に、可動機102は、1つ又は複数の可動式流体輸送機106を含むこともできる。流体輸送機106は、運搬路104に沿って作業現場100を移動し、流体(例えば、水及び/又は埃抑制剤)を作業現場100の表面に輸送して、埃レベルを制御するように構成し得る。様々なオペレーションに関連して、可動機102は、ネットワーク110を介して互いに通信し得るとともに、作業現場制御施設108と通信し得る。
【0015】
図2は、開示される実施形態による例示的な可動式流体輸送機106を示す。一実施形態では、流体輸送機106は、流体の輸送に使用するように改造されたオフハイウェイトラックであり得る。例えば、流体輸送機106は、特に、流体(例えば、水)を貯蔵するように構成された流体タンク200と、様々な配管、ホース、ポンプ、及び弁と、流体輸送機106が作業現場100のあちこちを移動する際に作業現場100の表面に流体を撒き、それにより、作業現場100での埃状況を制御するように構成された1つ又は複数のスプレーヘッド202とを装備し得る。スプレーヘッド202については、図4に関してさらに詳細に後述する。開示される流体輸送機106は代替として、水又は他の流体を多種多様な用途で分配するように組み立てられた別の種類の可動機を含み得ることを理解されたい。例えば、流体輸送機106は、農業設定では、タンクが備えられたトレーラーを牽引し、化学物質、水、又は他の材料(例えば、殺虫剤、肥料等)を分配するように構成されたトラクター、道路、滑走路、又は駐車場に食塩水を撒いて、雪及び氷を溶かすように構成されたオンハイウェイトラック、又は他の環境で流体を輸送するように構成された別の種類の車両を具現し得る。
【0016】
図3は、開示される実施形態による例示的な流体輸送制御システム302を示す。例示のために、流体輸送制御システム302は、流体輸送機106(例えば、採掘現場又は建築現場での放水トラックとして使用されるように組み立てられたオフハイウェイトラック)に適用されるものとして説明される。しかし、上述したように、流体輸送制御システム302は、他の様々な状況に適用可能であり得る。図3に示されるように、流体輸送制御システム302は、流体輸送システム304と、水等の流体を作業現場100の表面に分配して、埃状況を軽減するフロー制御システム306とを含み得る。オンボード流体輸送制御システム302は、通信装置308(例えば、アンテナ)を使用してネットワーク110を介して作業現場制御施設108及び他の可動機102と通信し得る。
【0017】
流体輸送システム304は、後述するように、フロー制御システム306に命令される率で流体(例えば、水)を作業現場100の表面に分配するように構成し得る。フロー制御システム306は、後述するように、状況下で適切な流体輸送率(例えば、l/m2/h単位)及び噴霧幅又は分配を決定し、決定率及び分配で流体を作業現場表面に出力するように流体輸送システム304に命令する所望の流量信号を出力するように構成し得る。
【0018】
図4は、流体輸送システム304の表現をさらに詳細に示す。示されるように、流体輸送システムは、動力を供給して、流体輸送機106を推進させ、流体輸送システム304に給電し、且つ/又は流体輸送機106に搭載された他のシステムに給電するように構成された動力源402(例えば、エンジン)を含み得る。すなわち、動力源402からの動力は、流体輸送機106に原動力を提供する以外の目的で使用することもできる。例えば、流体輸送用途用に構成される前のオフハイウェイトラックは、荷台の昇降等の補助用途に動力源402からの動力を使用するように設計されている場合がある。動力源402は、例えば、内燃エンジン、電気モータ、内燃エンジン−電気ハイブリッドシステム、又は当分野で既知の別の種類の動力源を含み得る。
【0019】
流体輸送システム304は、結合されて動力源402からの動力を受け取るトランスミッション404を含むこともできる。トランスミッション404は、段階的マニュアルトランスミッション、段階的オートマチックトランスミッション、自動連続可変トランスミッション、又は当分野で既知の他の任意の種類のトランスミッションを含み得る。トランスミッション404は、動力源402から動力出力を受け取り、選択された伝達比(例えば、ギア)に基づいて動力出力のトルクを変換し、変換された動力を1つ又は複数の摩擦装置(図示せず)(例えば、車輪、走行路、トレッド等)に結合して、流体輸送機106を推進し得る。加えて、トランスミッション404は、後述するように、変換された動力のうちのいくらかを流体輸送に結合し得る。
【0020】
流体輸送システム304は、油圧ポンプ408と、油圧モータ410とを含み得る。一実施形態では、ポンプ408は固定変位ポンプであり得、モータ410は可変変位モータであり得る。例えば、放水トラックとして使用するように構成されたオフハイウェイトラックは、流体を作業現場100に輸送する以外の目的ですでに配置された既存の固定変位ポンプ408を有し得る。可変変位モータ410の追加は、例えば、エンジン速度又は対地速度に関係なく流体流の制御を可能にすることにより、分配される流体量を制御するに当たり利点を提供し得る。このようにして、固定変位ポンプ408は引き続き、流体輸送パラメータの変さらにより影響を受けずに、流体輸送以外の用途に使用し得る。例えば、ポンプ408はモータ410を駆動し得、この流体をブレーキ構成要素(図示せず)の冷却に使用することもできる。ブレーキ冷却システムは、流体輸送システム304からの負荷変さらによる影響を受けなくてもよい。代替の実施形態では、ポンプ408及びモータ410は、可変変位ポンプ408及び固定変位モータ410又は可変変位ポンプ408及び可変変位モータ410等の固定及び/又は可変変位装置の他の適した組み合わせを含み得る。或いは、ポンプ408及びモータ410の代わりに、他の種類の開ループ又は閉ループ油圧システムを利用してもよい。
【0021】
図4を継続すると、ポンプ408の入力は、トランスミッション404に機械的又は他の様式で結合して、動力源402の変換された動力出力を受け取ることができる。そして、ポンプ408の出力は、周知の油圧手段を介して油圧モータ410の入力に油圧的に結合し得る。変換された動力出力は、ポンプ408を駆動して、油圧流体を油圧タンク412からポンプ408の出力を通して送り込み、それにより、モータ410を駆動し得る。そして、モータ410は、ポンプ408から送り込まれた油圧流体を受け取り、機械的出力を駆動し得、使われた油圧流体を油圧タンク412に戻し得る。モータ410の出力を機械的に結合して、流体ポンプ414を駆動し得る。一実施形態では、流体ポンプ414は固定変位ポンプであり得る。しかし、当業者は、所望であれば、可変変位ポンプ414を代わりに利用してもよいことを理解しよう。加えて、他の構成を使用してもよい。例えば、ポンプ408及びモータ410を省き、可変変位流体ポンプ414をトランスミッション404に直結してもよい。
【0022】
図4に示されるように、ポンプ414は、流体ライン416により流体タンク200(例えば、水タンク)(図2)、1つ若しくは複数のスプレーヘッド202(図2)、1つ若しくは複数のホースリール、及び/又は放水銃(図示せず)に流体的に結合し得る。ポンプ414は、モータ410により駆動され、流体ライン416を介して流体タンク200から流体(例えば、水)を引き込み、流体をスプレーヘッド202に輸送し得る。ホースリール及び放水銃は、作業現場100での埃制御及び/又は消火に使用し得る。
【0023】
そして、スプレーヘッド202は流体を作業現場100の表面に撒き、それにより、作業現場に水分を与えて、作業現場100での埃状況を制御し得る。スプレーヘッド202のそれぞれは、流体ライン416から流体を受け取る流入通路418を含み得る。スプレーヘッド202のそれぞれは流出オリフィス420を含むこともでき、流出オリフィス420を通して流体が作業現場100に撒かれる。スプレーヘッド202の具体的な構成は本開示にとって重要ではないが、一実施形態では、スプレーヘッド202は、参照により本明細書に援用される(特許文献2)に記載のスプレーヘッドを備え得る。しかし、本開示の趣旨及び範囲から逸脱せずに任意の種類のスプレーヘッド202を使用し得ることを理解されたい。
【0024】
図4に示される例では、3つのスプレーヘッド202が示される。図2に示されるように、第1のスプレーヘッド202aは、流体輸送機106の正面に向かって配置され、移動方向に対して流体輸送機106の左側及び/又は右側に噴霧するように構成し得る。第2のスプレーヘッド202bは、流体輸送機106の右側後部に配置され、移動方向に対して流体輸送機106の右側後部に噴霧するように構成し得る。第3のスプレーヘッド202cは、流体輸送機106の左側後部に配置され、移動方向に対して流体輸送機106の左側後部に噴霧するように構成し得る。しかし、任意の数のスプレーヘッド202を利用し得ることを理解されたい。さらに、スプレーヘッド202は、任意の所望位置又は向きで流体輸送機106に搭載して、作業現場100の適切なカバレッジを提供し得る。一実施形態では、スプレーヘッド202は、様々な噴霧が重ならずに、典型的な採掘運搬路の部分等の作業現場100の所定の表面積をカバーするのに適した幅を有する所望の噴霧パターンを提供するように位置決めし得る。
【0025】
図4は、共通の流体ライン416により接続されたスプレーヘッド202を示すが、スプレーヘッド202は独立して制御可能であり得る。例えば、オリフィス420は、全閉位置と全開位置との間で連続変更可能であり得る。或いは、オリフィス420は、全閉又は全開のみであることが可能であり得る。加えて、オリフィス420は、少なくとも流体輸送機106の移動方向に垂直な方向において、噴霧の幅又は分配(すなわち、広がり)を変更するように制御可能である。一実施形態では、例えば、オリフィス420は、幅狭噴霧、中間幅の噴霧、幅広噴霧、又は幅狭噴霧と幅広噴霧との間で連続変更可能な噴霧を提供するように制御可能である。このようにして、幅が様々な運搬路104に対処し得る。
【0026】
図4を継続すると、流体輸送システム304は、流体輸送システム304の様々な動作パラメータを検知するように構成された様々なセンサをさらに含み得る。例えば、流体輸送システム304は、センサの中でも特に、流体圧センサ422、動力源速度センサ424、及びトランスミッションセンサ426を含み得る。
【0027】
流体圧センサ422は、流体ライン416内の流体の圧力を検知するように配置し得る。或いは、流体圧センサ422は、流体流出ポンプ414の圧力を検知するように位置決めし得る。いずれの場合でも、流体圧センサ422は、検知された圧力の値(例えば、psi単位)を示す信号を出力し得る。流体圧センサ422は、例えば、容量圧力センサ、電磁圧センサ、ピエゾ抵抗歪みゲージ圧力センサ、圧電圧力センサ、光学圧力センサ、ポテンショメータ式圧力センサ、又は当分野で既知の他の任意の種類の圧力センサを含み得る。
【0028】
動力源速度センサ424は、動力源402の回転速度(例えば、出力シャフトの回転速度)を検知するように位置決めし得る。動力源速度センサ424は、動力源402の速度の値(例えば、RPM単位)を示す信号を出力し得る。動力源速度センサ424は、任意の種類のタコメータ又は当分野で既知の他の回転速度センサを含み得る。
【0029】
トランスミッションセンサ426は、トランスミッション404の1つ又は複数の動作パラメータを検知するように配置された1つ又は複数の装置を含み得る。例えば、トランスミッションセンサ426は、トランスミッション404が前進であるか、バックである、それともニュートラルであるか、並びにトランスミッション404のトルクと速度との比率(例えば、ギア)等のトランスミッション404の状態を検知し得る。トランスミッションセンサ426は、トランスミッション404の回転出力速度を検知することもできる。トランスミッションセンサ416は、これらの検知パラメータの1つ又は複数の値を示す1つ又は複数の信号を出力し得る。
【0030】
任意の上記センサ422〜426は、所望のパラメータを直接検知し、1つ又は複数の補助パラメータを検知して、所望のパラメータの値を導出し、又は他の何らかの間接的な手段により所望のパラメータの値を特定するように構成し得る。センサ422〜426の動作は当分野で周知であり、これ以上説明しない。
【0031】
流体輸送システム304は、流体輸送システム304の動作を制御するように構成された流体輸送コントローラ428をさらに含み得る。流体輸送コントローラ428は、例えば、流体輸送システム304の多くの機能を制御可能な汎用マイクロプロセッサ(例えば、電子制御モジュール)を具現し得る。流体輸送コントローラ428は、メモリ、補助記憶装置、プロセッサ(例えば、CPU)、又は流体輸送システム304の開示される機能を実行するプログラムを実行する他の任意の構成要素を含み得る。電源回路、信号調整回路、データ取得回路、信号出力回路、信号増幅回路、及び当分野で既知の他の種類の回路等の様々な他の回路を流体輸送コントローラ428に関連付け得る。
【0032】
図4に示されるように、流体輸送コントローラ428は、センサ422〜426と通信し得、ポンプ408、モータ410、及び/又はスプレーヘッド202に制御可能に接続し得る。流体輸送コントローラ428は、流体圧センサ422、動力源速度センサ424、及びトランスミッションセンサ426から信号を受信し得る。流体輸送コントローラ428は、流体制御システム306(図3)とも通信して、フロー制御信号を受信し得る。フロー制御信号は、流体輸送率RDelivery(例えば、l/m2/h単位)を示すことができ、フロー制御システム306は、この率でスプレーヘッド202から流体を出力するように流体輸送システム304に命令する。信号は、オンにすべき(すなわち、動作して流体を噴霧する)スプレーヘッド202、全体流体輸送率RDeliveryのスプレーヘッド202への相対的な割り振り(例えば、割合として)、及び所望の噴霧幅又は分配(例えば、幅狭、中間、又は幅広)をさらに示し得る。一実施形態では、例示的なフロー制御信号は以下のパラメータを含み得る:
<RDelivery,Delivery AmountHead1,
DistributionHead1, Delivery AmountHead2,
DistributionHead2, Delivery AmountHead3,
DistributionHead3, …>、
式中、RDeliveryは、フロー制御システム306により命令される全体流体輸送率(例えば、l/m2/h単位)を示し、Delivery AmountHead1は、スプレーヘッド202aに割り振られた流体輸送率の部分(例えば、33%)を示し、DistributionHead1は、スプレーヘッド202aの噴霧の幅又は分配(例えば、幅狭、中間、又は幅広)を示し、Delivery AmountHead2は、スプレーヘッド202bに割り振られた流体輸送率の部分(例えば、33%)を示し、DistributionHead2は、スプレーヘッド202bの噴霧の幅又は分配(例えば、幅狭、中間、又は幅広)を示し、Delivery AmountHead3は、スプレーヘッド202cに割り振られた流体輸送率の部分(例えば、33%)を示し、DistributionHead3は、スプレーヘッド202cの噴霧の幅又は分配(例えば、幅狭、中間、又は幅広)を示す。しかし、フロー制御信号を、より多数若しくはより少数のスプレーヘッド202に対応するように、又は所望であれば、異なる若しくは追加の流体輸送パラメータを含むように変更可能なことを理解されたい。
【0033】
流体輸送システム304の既知の特徴に基づいて、流体輸送コントローラ428は、フロー制御信号により命令される量及び分配又は幅(例えば、幅狭、中間、若しくは幅広)で流体を噴霧するようにオリフィス420を設定し得る。例えば、流体輸送コントローラ428は、所望の総フローの1/3を「幅広」噴霧として提供するようにオリフィス420aを制御し、所望の総フローの1/3を「幅広」噴霧として提供するようにオリフィス420bを制御し、所望の総フローの残りの1/3を「中間」幅噴霧として提供するようにオリフィス420cを制御し得る。
【0034】
次に、流体輸送コントローラ428は、フロー制御信号により示される流体輸送率RDeliveryを維持するために必要な流体輸送システム304の対応する内部流体圧を特定し得る。例えば、流体輸送コントローラ428のメモリは、スプレーヘッドオリフィス420の可能な様々な設定に関して様々な流体輸送率RDeliveryを流体輸送システム304の対応する内圧(すなわち、流体圧センサ422からの信号により示される流体ライン416又はポンプ414の出力での圧力)にマッピングする1つ又は複数のルックアップテーブルを記憶し得る。流体輸送システム304の適切な圧力を特定すると、流体輸送コントローラ428は、その圧力を維持するために適切な可変変位モータ410(及び/又はポンプ408)の変位を決定し得る。例えば、流体輸送コントローラ428のメモリは、動力源402及び/又はトランスミッション404の様々な出力速度並びに流体輸送システム304の様々な圧力を、可変変位モータ410(及び/又はポンプ408)の対応する変位値にマッピングする1つ又は複数のルックアップテーブルをさらに記憶し得る。モータ410(及び/又はポンプ408)の適切な変位を決定すると、流体輸送コントローラ428はそれに応答してモータ410(及び/又はポンプ408)を制御して、その変位を保持し、それにより、所望の流体輸送率を維持し得る。代替又は追加として、流体輸送コントローラ428は、上記参照した情報を使用し、それに応答してスプレーヘッドオリフィス420を制御して、流体輸送率RDeliveryを維持し得る。
【0035】
図5は、フロー制御システム306の表現をさらに詳細に示す。示されるように、フロー制御システム306は、フローコントローラ510と通信する検知システム500と、流体輸送情報データベース502と、作業現場情報データベース504と、天気情報データベース505と、オペレータインタフェース506と、ネットワークインタフェース508とを含み得る。検知システム500は、開示される流体輸送プロセスに関連する異なるパラメータを検知する様々な装置を含み得る。一実施形態、検知システム500は、機械動作検知システム512及び環境検知システム514の両方を含み得る。
【0036】
機械動作検知システム512は、開示される流体輸送プロセスに関連する流体輸送機106の異なる動作パラメータを検知する様々な検知装置を含み得る。例えば、機械動作検知システム512は、機械ビジョン装置516と、操縦角センサ518と、摩擦装置速度センサ520と、機械位置特定装置522と、機械向きセンサ524とを含み得る。
【0037】
機械ビジョン装置516は、流体輸送機106に位置決めされ、機械ビジョン装置516の視野内の作業現場100の表面上のポイント(例えば、物体)への距離及び方向を検出するように構成された装置を含み得る。機械ビジョン装置516は、LIDAR(光検出・測距)装置、RADAR(電波検出・測距)装置、SONAR(音波航法・測距)装置、カメラ装置、又は作業現場100の表面上のポイントへの距離及び方向を検出し得る他の任意の種類の装置を含み得る。機械ビジョン装置516は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100の表面上のポイントへの距離及び方向を示す信号を生成し、フローコントローラ510に通信し得る。一態様では、流体輸送機106は作業現場100のあちこちを移動し、機械ビジョン装置516を使用して、作業現場の表面上の物体(例えば、他の可動機102、作業現場人員、作業現場基盤等)を検出し、流体輸送を中止又は変更すべきであるかを判断し得る。例えば、サービス車両、別の機械102、機器、又は作業者が流体輸送機106の近傍で検出される場合、そのような物体への流体の噴霧を回避するために、流体輸送を中止又は変更することが望ましいことがある。
【0038】
さらに、機械ビジョン装置516を使用して、スプレーヘッド202を監視して、流体輸送システム304が適宜機能しているか否かを判断し得る。例えば、1つ又は複数の機器ビジョン装置516を位置決めして、スプレーヘッド202から噴霧される流体を監視し得る。機械ビジョン装置516が、スプレーヘッド202から噴霧されることが期待される流体量未満を検出する(例えば、スプレーヘッドがいくらかの流体を噴霧すべき場合に、流体がスプレーヘッド202から噴霧されない)場合、流体輸送システム304が適宜機能していないと判断し得る。そのような判断に基づいて、1つ又は複数の是正処置を取り得る。例えば、流体輸送システム304は診断モードになることができ、それにより、スプレーヘッド202、流体ライン416、又は流体輸送システム304の他の要素がパージ(例えば、詰まり除去)される。
【0039】
操縦角センサ518は、流体輸送機106の操縦角を検知又は他の様式で特定するように構成された任意の装置を含み得る。操縦角センサ518は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に特定された操縦角を示す信号を生成し、フローコントローラ510に通信する。例えば、流体輸送機106が運搬路104の湾曲部を通って移動している場合、流体輸送を低減又は変更することが望ましいことがある。
【0040】
摩擦装置速度センサ520は、流体輸送機106の1つ又は複数の摩擦装置526(例えば、車輪)の速度を特定するように構成された任意の装置を含み得る。摩擦装置速度センサ520は、後述するように、開示される流体輸送プロセスに使用するために、摩擦装置526の特定された速度を示す信号を生成し、フローコントローラ510に通信する。
【0041】
機械位置特定装置522は、作業現場100での流体輸送機106のリアルタイム位置を特定するように構成された任意の装置を含み得る。位置特定装置522は、複数の位置から高周波低電力無線又はレーザ信号を受信して解析し、流体輸送機106の相対位置(例えば、緯度及び経度)を三角測量し得る。例えば、位置特定装置522は、電子全地球測位システム(GPS)受信器、全地球的航法衛星システム(GNSS)受信器、又は1つ若しくは複数の衛星から信号を受信し、信号に基づいて流体輸送機106の位置を特定するように構成された別の種類の受信器を含み得る。代替又は追加として、機械位置特定装置522は、1つ又は複数の送信局から信号を受信し、送信局の既知の位置に対する流体輸送機106の相対的な2D又は3D位置を特定するように構成されたローカル無線又はレーザシステムを含み得る。代替又は追加として、位置特定装置522は、慣性基準ユニット(IRU)、走行距離計測又は推測航法による位置決め装置、又は流体輸送機106の相対的な2D若しくは3D位置をリアルタイムで受信若しくは特定するように動作可能な別の既知の位置特定装置を含み得る。位置特定装置522は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100での流体輸送機106の位置(例えば、緯度及び経度)を示す信号を生成し、フローコントローラ510に通信し得る。
【0042】
機械向きセンサ524は、作業現場100の表面上の流体輸送機106の進行方向及び傾斜(すなわち、向き)を特定するように構成された任意の装置を含み得る。例えば、向きセンサ524は、レーザレベルセンサ、傾斜センサ、傾斜計、無線方位測定器、ジャイロコンパス、フラックスゲートコンパス、或いは流体輸送機106が作業現場100のあちこちを移動する際の流体輸送機106の相対的なピッチ、ヨー、及び/又はロールを特定するように動作可能な別の既知の装置を含み得る。流体輸送機106のピッチ、ヨー、及びロールの成分の組み合わせが、流体輸送機106の位置での作業現場100の表面の相対的な傾き又は傾斜を示し得ることを理解されたい。向きセンサ524は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に流体輸送機106の進行方位及び傾斜を示す信号を生成し、フローコントローラ510に通信し得る。
【0043】
図5を継続すると、環境検知システム514は、開示される流体輸送プロセスに関連して、作業現場100に関連する異なる「天気」又は「環境」パラメータを検知する様々な検知装置を含み得る。例えば、環境検知システム514は、周囲温度センサ528と、太陽放射線センサ530と、大気圧センサ532と、湿度センサ534と、ダストセンサ536と、風センサ538と、降雨センサ540と、水分センサ541と、時計542とを含み得る。
【0044】
温度センサ528は、作業現場100の周囲温度を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、温度センサ528は、アナログ若しくはデジタル温度センサ、抵抗温度検出器(RTD)、サーモカプラ、サーモウェル、又は当分野で既知の他の任意の種類の温度センサを含み得る。温度センサ528は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100の検知される周囲温度の値(例えば、摂氏、華氏、ケルビン単位)を示す信号を生成し、フローコントローラ510に通信し得る。
【0045】
放射線センサ530は、作業現場100での太陽放射線の強度を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、放射線センサ530は、全天日射計、純放射計、量子センサ、光量計、ボロメータ、熱電対列、フォトダイオード、又は広帯域太陽放射線束密度を検知する他の任意の既知の装置を含み得る。放射線センサ530は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に太陽放射線の検知された強度の値(例えば、W/m2単位)を示す信号を生成し、フローコントローラ510に通信し得る。
【0046】
圧力センサ532は、作業現場100の大気圧を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100のどこかに位置決めされる)任意の装置を含み得る。圧力センサ532は、容量圧力センサ、電磁圧力センサ、ピエゾ抵抗歪みゲージ圧力センサ、圧電圧センサ、光学圧力センサ、ポテンショメータ式圧力センサ、又は当分野で既知の他の任意の種類の大気圧センサ等の気圧センサを含み得る。圧力センサ532は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に検知される大気圧(例えば、atm単位)の値を示す信号を生成し、フローコントローラ510に通信し得る。
【0047】
湿度センサ534は、作業現場100での湿度を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、湿度センサ534は、電気湿度計、ヘアテンション比重計(hair tension hydrometer)、乾湿計、又は湿度を検知する当分野で既知の他の任意の装置を含み得る。湿度センサ534は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に検知される湿度の値(例えば、単位容量空気当たりの水の質量を単位とする)示す信号を生成し、フローコントローラ510に通信し得る。
【0048】
ダストセンサ536は、ダストセンサ536の特定の位置での空気の埃状況若しくは埃レベル又は作業現場100の全体的な相対埃レベルを特定するように構成された任意の装置(例えば、流体輸送機106又は運搬路104の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、ダストセンサ536は、空気サンプルを収集し、一定強度の光線を光源から光センサに向かって空気に通し、光源と光センサとの間の透光干渉を測定し得る。ダストセンサ536は、干渉の大きさに基づいて空気中の埃の密度を特定し得る。ダストセンサ536は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に空気中の埃の密度の値(例えば、ppm単位)を示す信号を生成し、フローコントローラ510に通信し得る。当分野で既知の代替又は追加の種類のダスト監視装置又は方法を使用してもよいことを理解されたい。
【0049】
風センサ538は、作業現場100又はその近傍での風の速度及び方向を特定するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、風センサ538は、レーザドップラー風速計、超音波風速計、熱線風速計、又はタービン風速計等の速度風速計、プレート風速計若しくは管風速計等の圧力風速計、又は当分野で既知の他の任意の種類の風センサを含み得る。風センサ538は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に検知される風の速度及び方向の値(例えば、4km/h NW)を示す信号を生成し、フローコントローラ510に通信し得る。
【0050】
降雨センサ540は、作業現場100での降雨量又は降雨率を特定するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、降雨センサ540は、レインスイッチ、降雨ゲージ、又は他の任意の種類の当分野で既知の降雨検知装置を含み得る。降雨センサ540は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100の降雨量及び降雨率の値を示す信号を生成し、フローコントローラ510に通信し得る。
【0051】
水分センサ541は、作業現場100の表面の含水率(例えば、体積含水率)を特定するように構成された任意の装置を含み得る。例えば、1つ又は複数の水分センサ541は、流体輸送機106が移動する運搬路104に沿って等、作業現場100にわたる様々な位置で表面下に埋められて、それぞれの位置での作業現場表面の外水率を検知し得る。水分センサ541は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場表面の外水率の値を示す信号を生成し、フローコントローラ510に通信し得る。
【0052】
時計542は、現在の日時及び日付を特定し、後述するように、開示される流体輸送プロセスに使用するために、周期的に日時及び日付を示す信号をフローコントローラ510に通信し得る。一態様では、時刻及び日にちは、上述した他のセンサに関連する信号に添付するか、又は他の様式で含めることができる。
【0053】
環境検知システム514の様々なセンサを流体輸送機106に搭載して、又は作業現場100のあちこちの様々な場所に配置し得ることを理解されたい。すなわち、これらのセンサは必ずしも一緒に配置する必要はなくてもよい。例えば、センサによっては、流体輸送機106に配置し得るものもあれば、作業現場100の長さ及び幅にわたる(例えば、流体輸送機106が移動する運搬路104に沿った)1つ又は複数のステーションに配置し得るものもある。加えて、異なる数の各種のセンサを利用し得る。例えば、いくつかのダストセンサ536及び水分センサ541は、運搬路104に沿って間隔を置く等の作業現場100の様々な位置に提供して、作業現場100の埃レベル及び含水率の局所化された指標を提供し得る。他方、おそらく1つ又は2つのみの降雨センサ540、風センサ538、温度センサ528、圧力センサ534、及び湿度センサ534を地所の周辺又は中央位置(例えば、作業現場制御施設108)等の作業現場100に提供して、これらのパラメータに関する作業現場100での状況のより大域的な指標を提供し得る。任意の遠隔センサが、検知される各パラメータの値を示す信号を、ネットワーク110、無線通信、赤外線通信等を介してフローコントローラ510に無線で通信し得る。さらに、フロー制御システム306が、上記以外のパラメータを検知するように構成されたより少数又は異なる種類のセンサを利用し得ることを理解されたい。
【0054】
流体輸送情報データベース502は、流体輸送機106が流体を輸送する作業現場100の位置を識別し、その位置での適切な流体輸送率を決定できるようにする情報を含み得る。例えば、図6に示されるように、流体輸送情報データベース502は、流体輸送経路600と、1つ又は複数の流体輸送率成分曲線602とを含み得る。
【0055】
流体輸送経路600は、流体輸送機106が、作業現場表面に流体を輸送しながら移動し得る作業現場100にわたる所定の経路を示す情報を含み得る。例えば、流体輸送経路600は、流体輸送機106が移動して、作業現場100の埃の影響を受けやすい領域に対処し得る一連のポイントを示し得る。ポイントは、緯度及び経度座標、作業現場座標、又は他の種類の座標で定義し得る。一実施形態では、流体輸送経路600を作業現場管理者又は技術者により設定し得る。例えば、作業現場管理者又は技術者は、作業現場100の特定の領域を埃の影響を受けやすい領域(例えば、運搬路104)として識別し、対応する流体輸送経路600を設定することができ、流体輸送機106が、作業現場のオペレーション、利用可能な資源、又は他の要因を考慮して効率的にこれらの領域に対処できるようにする。流体輸送経路600は、オペレータインタフェース506に表示されて、流体輸送機106のオペレータが、流体輸送経路600を移動するように流体輸送機106を制御できるようにし得る。或いは、自律制御シナリオでは、流体輸送機106は、流体輸送経路600を移動するように流体輸送機106を自動的に制御し得る自律制御システム(図示せず)を含み得る。流体輸送経路600は、流体輸送機106が経路を移動する適切な速度(例えば、3km/h)を示す情報を含むこともできる。
【0056】
輸送率成分曲線602は、フロー制御システム306により監視される環境パラメータ及び機械動作パラメータの値に基づいて、フロー制御システム306が様々な状況下での適切な流体輸送率を決定できるようにする任意の情報を含み得る。一実施形態では、輸送率成分曲線602は、フロー制御システム306により監視されるパラメータのうちの1つ又は複数の値(例えば、周囲温度、大気圧、湿度等)を、対応する流体輸送率成分にマッピングし得る。これらの個々の流体輸送率成分の組み合わせ又は和が、全体流体輸送率RDelivery(すなわち、流体が作業現場表面に噴霧される率)を定義し得る。したがって、各流率成分曲線602は、全体流体輸送率RDeliveryの、それぞれのパラメータに起因し得る部分のみを定義し得る。輸送率成分曲線602は、ルックアップテーブル、マップ、公式、又は監視されるパラメータと対応する流体輸送率成分との関係を定義する他の任意の手段としてフローコントローラ510のメモリに記憶し得る。
【0057】
一実施形態では、輸送率成分曲線602は、経験的データ又は作業現場100についての他の知識に基づいて作業現場の管理者又は技術者により設定し得る。例えば、過去の経験に基づいて、作業現場管理者は、望ましくない埃状況の発生を回避するために、「通常」状況下で流体を特定の「基本」率(例えば、1.5l/m2/h)で作業現場100に輸送すべきであることを知り得る。これらの通常状況は、フロー制御システム306により監視されるパラメータのうちの1つ又は複数(例えば、特定の周囲温度、大気圧、湿度等)の所定のベースライン値に対応し得る。
【0058】
通常状況での基本流率を確立すると、作業現場管理者又は技術者は、全体流体輸送率RDeliveryに対する監視される各パラメータの重みを決定し、それにより、監視される各パラメータのベースライン流体輸送率成分(すなわち、各パラメータの所定値に対応するベースライン成分率)を定義し得る。例えば、湿度を周囲温度よりも重く加重することができ、周囲温度を大気圧よりも重く加重することができ、埃レベルを風速より重く加重することができる。したがって、監視される異なるパラメータの各ベースライン流体輸送率成分の和又は組み合わせは、全体ベースライン流体輸送率に等しくなり得る。次に、作業現場管理者又は技術者は、ベースライン流体輸送率成分が、対応する監視パラメータの値の変化に伴って変化し得る量を定義することにより、輸送率成分曲線602を生成し得る。例えば、作業現場管理者は、作業現場100での周囲温度に起因する流体輸送率成分を周囲温度範囲0℃〜40℃にわたって0.1l/m2/h〜0.3l/m2/hで線形に変化させるべきであると決定し得る。換言すれば、作業現場管理者又は技術者は、作業現場100での温度変化が、全体流体輸送率の特定の範囲内の変化のみに影響し得る(すなわち、その他の変数を一定に保った状態で)ように、周囲温度成分の加重を決定し得る。この情報に基づいて、次に、作業現場管理者又は技術者は、全体範囲にわたる温度の流体輸送率成分曲線を設定し得る。
【0059】
図6に示されるように、例示的な流体輸送率成分曲線602は、周囲温度曲線604、大気圧曲線606、太陽放射線曲線608、湿度曲線610、風速曲線612、埃レベル曲線614、表面組成曲線616、表面傾斜曲線618、道路プロファイル曲線620、交通量曲線622、交通事故曲線624、機械積載量曲線626、作業現場降雨曲線628、及び表面含水率曲線630を含み得る。
【0060】
周囲温度成分曲線604は、作業現場100での周囲温度T(例えば、摂氏単位)(x軸)と、周囲温度Tに起因し得る対応する流体輸送率成分RT(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、温度成分曲線604は、他の変数を一定に保った状態での作業現場100における周囲温度Tに基づく全体流体輸送率RDeliveryの部分のみを示し得る。一般に、作業現場100での周囲温度Tが高いほど、水分が蒸発して作業現場表面からなくなり得る率が高い(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、温度成分曲線604は一般に正の傾きを有し得、全体流体輸送率は周囲温度Tと共に増大する。
【0061】
大気圧成分曲線606は、作業現場100での大気圧P(例えば、atm単位)(x軸)と、大気圧Pに起因し得る対応する流体輸送率成分RP(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、温度成分曲線604のように、圧力成分曲線606は、他の変数を一定に保った状態での作業現場100における大気圧Pに基づく全体流体輸送率RDeliveryの部分のみを示し得る。一般に、作業現場100での大気圧Pが低いほど、水分が蒸発して作業現場表面からなくなり得る率が高い(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、圧力成分曲線606は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、大気圧Pが増大するにつれて低減する。圧力成分曲線606は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0062】
太陽放射線成分曲線608は、作業現場100での太陽放射線量SR(例えば、W/m2単位)(x軸)と、太陽放射線量SRに起因し得る対応する流体輸送率成分RSR(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、太陽放射線成分曲線608は、他の変数を一定に保った状態での作業現場100における太陽放射線量SRに基づく全体流体輸送率RDeliveryの部分のみを示し得る。一般に、作業現場100での太陽放射線量SRが高いほど、水分が蒸発して作業現場表面からなくなり得る率が高い(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、太陽放射線成分曲線608は一般に正の傾きを有し得、全体流体輸送率は太陽放射線量SRの増大に伴って増大する。太陽放射線成分曲線608は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0063】
湿度成分曲線610は、作業現場100での湿度H(例えば、立方メートルの空気当たりのグラム単位の水)(x軸)と、湿度Hに起因し得る対応する流体輸送率成分RH(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、湿度成分曲線610は、他の変数を一定に保った状態での作業現場100における湿度Hに基づく全体流体輸送率の部分のみを示し得る。一般に、作業現場100での湿度Hが増大するにつれて、水分が蒸発して作業現場表面からなくなる率は低減し得ることを理解されたい。したがって、図6に示されるように、湿度成分曲線610は一般に負の傾きを有し得、全体流体輸送率RDeliveryは湿度Hの増大に伴って低減する。湿度成分曲線610は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0064】
風速成分曲線612は、作業現場100での風速WS(例えば、km/h単位)(x軸)と、風速WSに起因し得る対応する流体輸送率成分RWS(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、風速成分曲線612は、他の変数を一定に保った状態での作業現場100における風速WS(例えば、km/h単位での平均風速)に基づく全体流体輸送率の部分のみを示し得る。一般に、作業現場100での風速WSが増大するにつれて、水分が蒸発して作業現場表面からなくなり得る率も増大し得る(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、風速成分曲線612は一般に正の傾きを有し得、全体流体輸送率RDeliveryは風速WSの増大に伴って増大する。風速成分曲線612は、上述したその他の成分曲線のように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0065】
埃レベル成分曲線614は、作業現場100で検知された埃レベルD(例えば、ppm単位)(x軸)と、埃レベルDに起因し得る対応する流体輸送率成分RD(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、埃レベル成分曲線614は、他の変数を一定に保った状態で、作業現場100で検知された埃レベルDに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、他の変数に関わりなく、埃レベルが閾値を超える場合、又は埃レベルが増大する場合、追加の流体を作業現場表現に輸送すべきであると判断し得る。したがって、図6に示されるように、埃レベル成分曲線614は一般に正の傾きを有し得、全体流体輸送率RDeliveryは検知される埃レベルDが増大するにつれて増大する。埃レベル成分曲線614は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0066】
表面組成成分曲線616は、作業現場表面の組成SC(すなわち、物質の種類)(x軸)と、表面組成に起因し得る対応する流体輸送率成分RSC(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、表面組成成分曲線616は、作業現場表面を構成する物質の種類に基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、他の変数に関わりなく、作業現場表面を構成する物質の種類に応じて、流体をより高い又はより低い率で輸送すべきであると判断し得る。「埃の少ない」物質よりも「埃が多い」物質には、流体をより高い率で輸送して、望ましくない埃状況の作業現場100での発生の回避に役立てることが望ましいことがある。したがって、一実施形態では、異なる種類の作業現場表面物質が、物質が風化して埃を生成し易い程度の分布に沿って分類することができ、表面組成成分曲線616は、分布に基づいて生成し得る。例えば、石炭、頁岩、及び岩を「埃の多い」物質と分類し、その一方で、表土及びオイルサンドを「埃の少ない」ものとして分類し得る。したがって、図6に示されるように、表面組成成分曲線616は一般に正の傾きを有し得、全体流体輸送率RDeliveryは、その他の変数を一定に保つ場合、「埃の少ない」物質よりも「埃の多い」物質の場合に大きくなる。
【0067】
表面傾斜成分曲線618は、作業現場表面の傾き又は傾斜θSI(例えば、水平に対する度を単位とする)(x軸)と、傾き又は傾斜θSIに起因し得る対応する流体輸送率成分RθSI(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、表面傾斜成分曲線618は、作業現場表面の傾き又は傾斜θSIに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、作業現場100の平坦又は水平な領域よりも作業現場100の急傾斜領域では流体をより低い率で輸送すべきであると判断し得る。これは、上り坂又は下り坂を移動中の可動機102に追加の摩擦を提供する等の安全対策のために望ましいことがある。したがって、図6に示されるように、表面傾斜成分曲線618は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、その他の変数を一定に保つ場合、作業現場表面の傾き又は傾斜θSIが増大するにつれて低減する。
【0068】
道路プロファイル成分曲線620は、作業現場100での道路の湾曲半径RC(例えば、m単位)と、道路の湾曲半径に起因し得る対応する流体輸送率成分RRC(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、道路プロファイル成分曲線620は、作業現場100での道路(例えば、運搬路104)の湾曲の程度に基づく全体流体輸送率の部分のみを示し得る。例えば、作業現場管理者又は技術者は、直線路面よりも湾曲した路面(例えば、カーブ又は交差点)で流体をより低い率で輸送して、作業現場100で可動機102又は採掘サービス車両が、カーブ、交差点等に対応しながら、摩擦を失わないように、又はスリップを回避するのに役立てるべきであると判断し得る。したがって、図6に示されるように、道路プロファイル成分曲線620は一般に負の傾きを有し得、全体流体輸送率は、その他の変数を一定に保つ場合、道路の湾曲RCが増大するにつれて低減する。
【0069】
交通量成分曲線622は、作業現場100での交通量TV(例えば、車両数/h単位)と、交通量に起因し得る対応する流体輸送率成分RTV(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、交通量成分曲線622は、その他の変数を一定に保った状態での作業現場100における交通量TVに基づく全体流体輸送率RDeliveryの部分のみを示し得る。タイヤ、走行路、トレッド、又は可動機102の他の摩擦装置からの摩耗が、作業現場表面を撹拌して壊し、埃を生成し得ることを理解されたい。さらに、行き交う交通からの空気流が、作業現場をより急速に乾燥させ得る。加えて、作業現場100の交通量の多い領域は、交通量の少ない領域よりも多くの作業現場人員、作業領域、作業活動、又はオペレーション、機械等を含む傾向を有し得る。したがって、作業現場管理者又は技術者は、交通量の多い作業現場表面の撹拌増大を補償するため、且つ交通量の多い領域で埃に露出され得る作業人員、機械、プロジェクト等が追加されることに鑑みて、作業現場100の交通量の少ない領域よりも、作業現場100の交通量の多い領域で、流体をより高い率で輸送すべきであると判断し得る。したがって、図6に示されるように、交通量成分曲線622は一般に正の傾きを有し得、全体流体輸送率は、その他の変数を一定に保つ場合、交通量TVの増大に伴って増大する。
【0070】
交通事故成分曲線624は、作業現場100で報告された交通事故TI(例えば、事故数又は交通量に対する交通事故数の比率)と、交通事故TIに起因し得る対応する流体輸送率成分RTI(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、交通事故成分曲線624は、その他の変数を一定に保った状態での報告された交通事故TIに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、交通事故の多い領域での摩擦を向上させるために、交通事故が発生しやすい領域又は交通事故が過去に発生した領域に対して、作業現場100のその他の領域よりも流体を低い率で輸送すべきであると判断し得る。交通事故は、例えば、車両スリップ事故、衝突、交通渋滞等を含み得る。したがって、図6に示されるように、交通事故成分曲線624は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、交通事故TIの増大に伴って低減する。交通事故成分曲線624は、経験的データ、交通調査データ、作業現場表面についての知識、又は作業現場100についての他の情報に基づいて特定し得る。
【0071】
機械積載量成分曲線626は、作業現場100での可動機102の積載量L(例えば、最大積載量の割合としての平均利用積載容量)と、積載量Lに起因し得る対応する流体輸送率成分RL(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、機械積載量成分曲線626は、その他の変数を一定に保った状態での作業現場における可動機102の積載量Lに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、可動機102に摩擦の増大を提供して、積載を安全に運ぶために、可動機102が作業現場100の他の領域よりも重い積載を運ぶ作業現場100の領域では、流体をより低い率で輸送すべきであると判断し得る。したがって、図6に示されるように、機械積載量成分曲線626は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、他の変数を一定に保った状態で、機械積載量が増大するにつれて低減する。機械積載量成分曲線626は、経験的データ、交通調査データ、作業現場表面についての知識、又は作業現場100についての他の情報に基づいて特定し得る。
【0072】
作業現場降雨成分曲線628は、作業現場100での降雨量WP(例えば、cm単位)と、降雨量WPに起因し得る対応する流体輸送率成分RWP(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、作業現場降雨成分曲線628は、その他の変数を一定に保った状態での作業現場100における降雨量WPに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、作業現場100に最近、雨が降った場合、又は作業現場100に近い将来、雨が降ると予期される場合、必要とされる流体輸送率RDeliveryが低いと判断し得る。これは、例えば、流体輸送資源を節約し、作業現場100に過度の水を撒くことを回避するために望ましいことがある。したがって、図6に示されるように、作業現場降雨成分曲線628は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、作業現場100での降雨量WPが増大するにつれて低減する。一実施形態では、作業現場降雨成分曲線628のx軸上の各位置は、所定の時間期間(例えば、現在時刻の数日前から現在時刻の数日後まで)にわたる作業現場100での降雨量WPに対応し得る。したがって、作業現場降雨成分曲線628は、最近降った雨の量と、予期される将来の降雨量(例えば、天気情報データベース505からの天気報告情報)とに基づいて、流体輸送率成分RWPを定義し得る。作業現場降雨成分曲線628は、経験的データ、交通調査データ、作業現場表面についての知識、又は作業現場100についての他の情報に基づいて特定し得る。
【0073】
含水率成分曲線630は、作業現場100の表面の含水率M(例えば、容積含水率)(x軸)と、含水率Mに起因し得る対応する流体輸送率成分M(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、含水率成分曲線630は、その他の変数を一定に保った状態での作業現場表面の含水率Mに基づく全体流体輸送率の部分のみを示し得る。一般に、高い含水率を有する作業現場表面の部分は、低い含水率を有する作業現場の部分よりも乾燥して埃を生成する可能性が低い(又は乾燥して埃を生成するまでに長い時間がかかる)ことを理解されたい。加えて、作業現場表面のそのような部分は、追加の流体を吸収する容量が低く、追加の流体がこれらの領域に輸送された場合、貯留水を生じさせるおそれがある。したがって、作業現場表面の含水率の高い部分では、他の変数を一定に保った状態で、作業現場表面の含水率の低い領域よりも低い流体輸送率を必要とし得る。したがって、図6に示されるように、含水率成分曲線630は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、作業現場方面含水率Mの増大に伴って低減する。含水率成分曲線630は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0074】
図5に戻ると、作業現場情報データベース504は、フロー制御システム306が、流体輸送率成分曲線602と併せて使用して、流体輸送機106が流体輸送経路600を移動する際に流体を作業現場表面に輸送する率RDeliveryをリアルタイムで決定し得る、作業現場100についての情報を含み得る。作業現場情報データベース504は、フローコントローラ510に関連するメモリに記憶し得る。図7は、作業現場情報データベース504に含まれる情報の例示的な表現を示す。示されるように、作業現場情報データベース504は、例えば、作業現場地形マップ702と、作業現場メタデータテーブル704とを含み得る。
【0075】
作業現場地形マップ702は、数学的座標において作業現場100の表面を定義する電子マップを含み得る。座標は、作業現場座標系、全地球測位座標系(例えば、緯度及び経度の座標)、又は他の任意の種類の座標系に基づき得る。
【0076】
作業現場メタデータテーブル704は、マップ、ルックアップテーブル、行列、又は作業現場100の特徴を定義する情報を含む別のデータ記憶構造を含み得る。例えば、作業現場メタデータテーブル704は、作業現場表面上の位置706に従ってインデックス付けることができ、作業現場表面位置706に対応する表面傾斜データ708、表面組成データ710、道路プロファイル情報712、路幅情報714、交通量情報716、交通事故情報718、機械積載量情報720、除外ゾーン情報722、及び太陽露出情報724を含み得る。作業現場メタデータテーブル704は、作業現場調査情報、経験的データ、又は作業現場100に関連する他のリポート若しくは情報に基づいて作業現場管理者又は技術者により作成し得る。代替又は追加として、作業現場メタデータテーブル704は、作業現場100の他の可動機102により通信される情報、作業現場制御施設108から受信する情報、又はオペレータインタフェース506を介して流体輸送機106のオペレータにより入力される情報に基づいて、フローコントローラ510により定期的又はリアルタイムで更新し得る。
【0077】
作業現場表面位置706は、作業現場メタデータテーブル704の列を含み得、列の各行は作業現場表面上の異なる位置に対応する。例えば、作業現場100を所定サイズ(例えば、25m2)のセルを有するx−y格子に分割し得、作業表面位置列706の各行は、作業現場100の異なるセルに対応し得る。
【0078】
表面傾斜データ708は、作業現場表面の傾き又は傾斜θSIについての情報を含み得る。例えば、表面傾斜データ708は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行により識別される作業現場100のセル内の作業現場表面の傾き又は傾斜θSI(例えば、水平に対する割合等級又は程度)を示し得る。一実施形態では、表面傾斜データ708は、作業現場100のセルの平均傾き又は傾斜を示し得る。
【0079】
表面組成データ710は、作業現場表面を組成する物質SCの種類についての情報を含み得る。例えば、表面組成データ710は作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内の表面を組成する物質SCの種類の分類を示し得る。例えば、各セルは、作業現場100のセル内の表面物質の風化及び埃生成のし易さの分布(例えば、「埃が少ない」から「埃が多い」までの1から10の尺度等)に沿って分類し得る。
【0080】
道路プロファイル情報712は、作業現場100での道路のプロファイルについての情報を含み得る。例えば、道路プロファイル情報712は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内に配置された任意の道路の湾曲半径RC(例えば、m単位)を示し得る。
【0081】
路幅情報714は、作業現場100の道路の幅についての情報を含み得る。例えば、路幅情報714は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内に配置された任意の道路の幅を示し得る。一実施形態では、路幅情報714は、道路の幅を単位長(例えば、メートル)で示し得る。代替又は追加として、路幅情報714は、道路を狭い、中程度、又は広いとして分類し得る。後述するように、フローコントローラ510は路幅情報714を使用して、スプレーヘッド202の適切な噴霧幅若しくは分配を決定し、且つ/又はオン若しくはオフにする特定のスプレーヘッド202を選択し得る。
【0082】
交通量情報716は、作業現場100の車両交通量TVについての情報を含み得る。例えば、交通量情報716は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内の車両交通量TVを示し得る。例えば、交通量情報716は、合計車両数(例えば、過去からその時点までの合計)又は1時間当たりのセル通行車両数で作業現場100のセル内の交通量TVを示し得る。
【0083】
交通事故情報718は、作業現場100で発生し、報告された交通事故TIについての情報を含み得る。例えば、交通事故情報718は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内で発生し、報告された交通事故TIの数(例えば、セルの過去からその時点までの合計)を示し得る。代替又は追加として、交通事故情報718は、作業現場100のセル内の交通量に対する報告交通事故数の比率として、又は作業現場100のセルでの交通事故の発生し易さの程度を示す別の様式で表現し得る。上で示したように、「交通事故」は、衝突、スリップ事故、交通渋滞、又は他の任意の種類の交通事象を指し得る。
【0084】
機械積載量情報720は、作業現場100を移動中の可動機102の積載量Lについての情報を含み得る。例えば、機械積載量情報720は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内を移動中の可動機102の積載量を示し得る。換言すれば、機械積載量情報720は、作業現場100の特定のセルを移動中の可動機102(例えば、貨物を有する)の積載の程度を示し得る。例えば、可動機102の積載量は、運搬トラックが荷積み位置と荷下ろし位置との間で1つ又は他の物質を運ぶ作業現場100の領域で比較的高くなり得る。一実施形態では、機械積載量情報720は、作業現場100のセル内を移動する可動機102の平均利用積載容量(例えば、運ばれる最大貨物量の割合)として表現し得る。別の実施形態では、機械積載量情報720は、作業現場100のセル内で可動機102により運ばれる平均貨物量(例えば、トン単位)として表現し得る。しかし、機械積載量情報720を他の方法で表現してもよいことを理解されたい。
【0085】
除外ゾーン情報722は、流体輸送が禁止又は他の様式で制限される作業現場100の領域を識別し得る。例えば、作業現場管理者又は技術者は、建物、可動機102、車両、機械、基盤、作業現場人員、作業プロジェクト(例えば、掘削又は建築プロジェクト)等を含む作業現場100の領域を、これらの領域での流体噴霧が進行中の作業動作を妨げるおそれがあるため、除外ゾーンとして定義し得る。別の例では、作業現場管理者又は技術者は、交差点、困難な地形(例えば、急峻な地形若しくは交通事故がよく発生する地形)、不良な視界、又は車両運転手にとっての他の問題を有する作業現場100の領域を、これらの領域での流体噴霧がこれらの領域を滑りやすく又は車両交通を危険にし得るため、除外ゾーンとして定義し得る。一実施形態では、除外ゾーン情報722は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセルが除外領域−流体輸送が禁止又は制限される作業現場100の領域−を含むか否かを示す情報(例えば、「イエス」又は「ノー」)を含み得る。
【0086】
さらなる態様では、除外ゾーン情報722は、除外ゾーンの種類又は作業現場100への特定の領域への流体輸送が禁止若しくは制限される理由を示すこともできる。一実施形態では、除外ゾーン情報722は、作業現場100の領域が物体(例えば、車両、可動機102、建物、作業員、静止機械、基盤等)を含むか否か、又は作業現場100の領域が作業現場表面又は地形特徴(例えば、問題のある地形、交差点、不良な視界等)を含むか否かを示し得る。
【0087】
太陽露出情報724は、日付及び日時に基づいて作業表面が太陽放射線に露出されているか否かを示す情報を含み得る。例えば、太陽露出情報724は、作業現場メタデータテーブル704の列を含み得、列の各行は、季節(例えば、春、夏、秋、冬)及び日時(例えば、朝、昼、夕)に基づいて、作業現場表面位置列706のその行に対応するセルが太陽放射線に露出されているか否か(例えば、日向又は日陰)を示し得る。いくつかの作業現場が、地形、日時、及び季節に応じて太陽放射線に露出され得るか、又は露出され得ない領域を有することを理解されたい。例えば、深く開けた採掘坑の領域によっては、朝遅くから昼の早い時間までしか直接の太陽放射線に露出されない領域があり得る。
【0088】
図5に戻ると、天気情報データベース505は、フローコントローラ510のメモリに記憶し得、作業現場100に関連する天気情報を含み得る。天気情報は、例えば、作業現場100の過去の天気情報と、作業現場100の天気予報情報とを含み得る。一実施形態では、天気情報は、作業現場100の温度、太陽放射線レベル、雲量、湿度レベル、気圧、降雨率、降雨量、又は他の天気データを示し得る。
【0089】
オペレータインタフェース506は、モニタ、タッチスクリーン、キーパッド、制御パネル、キーボード、ジョイスティック、レバー、ペダル、ホィール、又はオペレータからの入力を受け取り、又はオペレータに出力を提供する当分野で既知の他の任意の装置を含み得る。開示される流体輸送プロセスに関連して、オペレータインタフェース506は、機械オペレータから入力を受信し得、対応するコマンド信号をフローコントローラ510に通信し得る。オペレータインタフェース506は、フローコントローラ510から受信する信号に基づいて情報を機械オペレータに対して表示することもできる。
【0090】
ネットワークインタフェース508は、ネットワーク110を介してデータを送受信する任意のハードウェア又はソフトウェアを含み得る。例えば、ネットワークインタフェース508は、モデム、Ethernet通信装置、光ファイバ通信装置、セルラ通信装置、赤外線通信装置、衛星通信装置、及び/又はネットワーク110を介してデータを送受信可能な他の任意のネットワーク通信装置を含み得る。したがって、ネットワークインタフェース508は、衛星、セルラ、赤外線、電波、又は他の種類の無線通信信号を使用して通信するように構成し得る。
【0091】
フローコントローラ510は、開示される流体輸送プロセスに関連して情報の監視、記録、記憶、インデックス付け、処理、又は通信を行う手段を含み得る。フローコントローラ510は、メモリと、補助データ記憶装置(例えば、磁気若しくは光学ディスクドライブ)、プロセッサ(例えば、CPU)、又はフロー制御システム306の開示される機能を実行するプログラムを実行する他の任意の構成要素を含み得る。電源回路、信号調整回路、データ取得回路、信号出力回路、信号増幅回路、及び当分野で既知の他の種類の回路等の他の様々な回路が、フローコントローラ510に関連し得る。
【0092】
フローコントローラ510は、機械動作検知システム512及び環境検知システム514の様々なセンサから信号を受信し得、検知されたパラメータに関連する値をメモリに記憶して、後述するように後続処理に使用し得る。可動式流体輸送機106に配置されないセンサ(例えば、ダストセンサ536又は水分センサ541)の場合、フローコントローラ510は、センサのそれぞれの既知の位置に従って様々なパラメータ値をインデックス付け得る。例えば、フローコントローラ510は、作業現場表面上のセンサの位置を識別する座標(例えば、緯度及び経度)を、センサにより測定されるパラメータ(例えば、温度、圧力、埃レベル、含水率等)の実際の値に関連付け得る。
【0093】
一実施形態では、フローコントローラ510は、作業現場100での埃状況を制御するために、(1)流体を作業現場表面に輸送するのに適した率RDeliveryと、(2)流体輸送の適した幅又は分配(すなわち、スプレーヘッド202からの噴霧の幅又は分配)を決定するように構成し得る。詳細に後述するように、フローコントローラ510は、機械動作検知システム512及び環境検知システム514のセンサのうちの1つ又は複数から受信する信号、流体輸送情報データベース502、作業現場情報データベース504、及び/又は天気情報データベース505に含まれる情報、オペレータインタフェース506から受信する情報、並びに/或いは可動機102又は作業現場制御施設108から受信する情報に基づいて、流体輸送率RDelivery及び分配を決定し得る。
【0094】
図8は、流体輸送機106が流体輸送経路600(例えば、運搬路104)を移動する際に、開示される実施形態によりフローコントローラ510が実行し得る例示的な流体輸送決定プロセス800を示す。ステップ802において、フローコントローラ510は、上述した流体輸送パラメータのうちの1つ又は複数の値を特定し得る。例えば、フローコントローラ510は、上述した「天気」又は「環境」パラメータのうちの1つ又は複数の値をまず特定し得る。特に、フローコントローラ510は、温度センサ528、圧力センサ532、放射線センサ530、湿度センサ534、及び風センサ538から受信する各信号に基づいて、作業現場100での周囲温度T(例えば、℃単位)、大気圧P(例えば、atm単位)、太陽放射線SR(例えば、W/m2単位)、湿度H(例えば、立方メートルの空気当たりのグラム単位の水)、及び風速WS(例えば、km/h単位)の値を特定し得る。代替又は追加として、フローコントローラ510は、天気情報データベース505からこれらのパラメータの値を検索し得る。加えて、フローコントローラ510は、天気情報データベース505を使用して、作業現場100での(例えば、所定の時間期間にわたる)最近及び予想される降雨量WPの値(例えば、cm単位)を特定し得る。フローコントローラ510は、代替又は追加として、降雨センサ540により収集される降雨データに基づいて、作業現場100での最近及び予想される降雨量WPの値を特定し得る。
【0095】
ステップ802に関連して、フローコントローラ510は、上述した「作業現場表面」パラメータのうちの1つ又は複数の値も特定し得る。特に、フローコントローラ510は、作業現場100上の流体輸送機106の位置での埃レベルD(例えば、ppm単位)、作業現場表面の含水率M(例えば、体積含水率)、表面組成SC(例えば、「埃が多い」又は「埃が少ない」)、傾き又は傾斜θSI(例えば、水平からの等級又は程度の割合で)、及び道路プロファイルRP(例えば、m単位の湾曲半径)の値を特定し得る。例えば、ダストセンサ536が可動式流体輸送機106に配置される場合、フローコントローラ510は、ダストセンサ536から受信される信号(例えば、メモリに記憶される)に基づいて、作業現場100での流体輸送機106の位置での埃レベルDの値を特定し得る。1つ又は複数のダストセンサ536が作業現場表面のあちこちの異なる位置に位置決めされる場合、フローコントローラ510は、可動式流体輸送機106の最近傍に配置されたダストセンサ536の信号に基づいて、埃レベルDの値を特定し得る。代替又は追加として、フローコントローラ510は、作業現場表面で可動式流体輸送機106の近傍の複数のダストセンサ536の信号により示される値を平均化することにより、埃レベルDの値を特定し得る。
【0096】
同様に、フローコントローラ510は、水分センサ541から受信する信号(例えば、メモリに記憶される)に基づいて、流体輸送機106の位置での作業現場表面の含水率Mの値を特定し得る。1つ又は複数の水分センサ541が作業現場表面のあちこちの異なる位置に位置決めされる場合、フローコントローラ510は、可動式流体輸送機106の最近傍に配置された水分センサ541の信号に基づいて、作業現場表面の含水率Mの値を特定し得る。代替又は追加として、フローコントローラ510は、可動式流体輸送機106の近傍にある複数の水分センサ541の信号又は作業現場100上の他の位置にある水分センサ541の信号により示される値を平均化することより、作業現場表面の水分率Mの値を特定し得る。
【0097】
フローコントローラ510は、作業現場メタデータテーブル704を使用して作業現場100の流体輸送機106の位置での作業現場表面組成の値SC(例えば、「埃が多い」又は「埃が少ない」)を特定し得る。特に、フローコントローラ510は、位置特定装置522から受信する信号に基づいて、流体輸送機106の位置を特定し得る。次に、フローコントローラ510は、作業現場表面位置列706内のその位置を参照し、表面組成データ列710から対応する表面組成値SCを検索し得る。
【0098】
同様に、フローコントローラ510は、作業現場メタデータテーブル704の作業現場表面位置列706で流体輸送機106の位置を参照し、作業現場表面傾斜データ列708から対応する傾き又は傾斜値θSIを検索することにより、流体輸送機106の位置での作業現場表面の傾き又は傾斜の値θSIを特定し得る。フローコントローラ510は、代替又は追加として、向きセンサ524から受信する信号に基づいて、又は作業現場地形マップ702を使用して流体輸送機106の位置での勾配若しくは傾きを計算することにより、傾き又は傾斜値θSIを特定し得る。
【0099】
フローコントローラ510は、作業現場メタデータテーブル704を使用して流体輸送機106の位置での道路(例えば、運搬路104)の湾曲半径RCを特定することもできる。特に、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を参照し、道路プロファイル情報列712から対応する湾曲半径RCを検索し得る。代替又は追加として、フローコントローラ510は、操縦角センサ518から受信する信号に基づいて道路の湾曲半径RCを特定し得る。
【0100】
さらに、ステップ802に関連して、フローコントローラ510は、上述した「作業動作」パラメータのうちの1つ又は複数の値を特定し得る。特に、フローコントローラ510は、作業現場100の流体輸送機106の位置での交通量TV(例えば、車両数/h)、交通事故TI(例えば、交通事故数又は交通量に対する交通事故の比率)、及び機械積載量L(例えば、平均利用積載容量の割合)の値を特定し得る。
【0101】
例えば、フローコントローラ510は、作業現場メタデータテーブル704を使用して作業現場100の流体輸送機106の位置での交通量の値TVを特定し得る。特に、フローコントローラ510は、位置特定装置522から受信する信号に基づいて流体輸送機106の位置を特定し得る。次に、フローコントローラ510は、作業現場表面位置列706でその位置を参照し、交通量情報列716から対応する交通量値TVを検索し得る。フローコントローラ510は同様に、交通事故情報列718及び機械積載量情報列720のそれぞれから流体輸送機106の位置での交通事故TI及び機械積載量Lの値を検索し得る。
【0102】
ステップ804において、フローコントローラ510は、ステップ802において特定された流体輸送パラメータの値に基づいて流体輸送率成分を特定し得る。例えば、フローコントローラ510は、温度成分曲線604、圧力成分曲線606、太陽放射線成分曲線608、湿度成分曲線610、風速曲線612、作業現場降雨曲線628、埃レベル曲線614、表面組成成分曲線616、表面傾斜曲線618、道路プロファイル曲線620、交通量曲線622、交通事故曲線624、機械積載量曲線626、及び含水率成分曲線630のそれぞれで、ステップ802において特定された周囲温度T、大気圧P、太陽放射線SR、湿度H、風速WS、最近又は予想される作業現場降雨WP、埃レベルD、表面組成SC、傾き若しくは傾斜θSI、道路プロファイルRP、交通量TV、交通事故TI、機械積載量L、及び表面含水率Mの値を参照し得る。次に、フローコントローラ510は、これらの成分曲線602から、流体輸送率成分の各値:
RT、RP、RSR、RH、RWS、RWP、RD、RSC、RθSI、RRP、RTV、RTI、RVL、及びRM
を特定し得る。
【0103】
一実施形態では、フローコントローラ510は、流体輸送機106の位置での作業現場表面の傾き又は傾斜θSIを考慮するように、太陽放射線流体輸送率成分RSRを変更し得る。場合によっては、水平(すなわち、平らな地面)に相対する作業現場100での太陽放射線SRの強度を特定し得ることを理解されたい。例えば、放射線センサ530は、水平面に位置決めし得、又は天気情報データベース505が、水平地面に相対してとられた太陽放射線測定を含み得る。したがって、測定される太陽放射線値SRは、作業現場表面の傾いた部分又は傾斜した部分での太陽放射線傾斜の真の強度を反映しない場合がある。したがって、一実施形態では、フローコントローラ510は、作業現場表面での流体輸送機106の位置での傾き又は傾斜θSIに基づいて、太陽放射線流体輸送率成分RSRを調整し得る。例えば、フローコントローラ510は、RSR’=RSRsin(θSI)に従って調整太陽放射線流体輸送率成分RSR’を計算することができ、式中、RSRは、太陽放射線成分曲線608から特定される太陽放射線流体輸送率成分であり、θSIは、流体輸送機106の位置での作業現場表面の傾き又は傾斜である。
【0104】
代替又は追加として、フローコントローラ510は、作業現場メタデータテーブル704に基づいて、太陽放射線流体輸送率成分RSRの所定の値を選択し得る。例えば、フローコントローラ510は、時計542から受信する信号に基づいて日時及び日付を特定し得る。次に、フローコントローラ510は、作業現場メタデータテーブル704の作業現場表面位置列706で、位置特定装置522からの信号により示される流体輸送機106の位置を参照し得る。次に、フローコントローラ510は、太陽露出情報列724から、日時及び日付に対応する太陽露出情報(例えば、日向又は日陰)を検索し得る。次に、フローコントローラ510は、太陽露出情報(例えば、日向又は日陰)を所定の太陽放射線値SR(例えば、W/m2単位)に変換し、太陽放射線成分曲線608上でその値を参照して、対応する太陽放射線流体輸送率成分RSRを検索し得る。
【0105】
ステップ806において、フローコントローラ510は、ステップ804において特定された流体輸送率成分に基づいて、全体流体輸送率RDeliveryを決定し得る。一実施形態では、フローコントローラ510は、流体輸送率成分を以下のように加算することにより、全体流体輸送率RDeliveryを決定し得る。
RDelivery=RT+RP+RSR+RH+RWS+RWP+RD+RSC+RθSI+RRP+RTV+RTI+RVL+RM
【0106】
しかし、フローコントローラ510が全体流体輸送率RDeliveryを他の方法で決定してもよいことを理解されたい。例えば、フローコントローラ510は、上述したパラメータのすべてがフロー制御システム306により監視される訳ではない場合等、上述した流体輸送率成分のすべて未満を使用して、全体流体輸送率RDeliveryを決定してもよい(例えば、温度、圧力、湿度、及び表面傾斜のみ)。そのような場合、フローコントローラ510は、流体を作業現場表面に適切な率で輸送するために、これらの個々の流体輸送率成分及び/又は流体輸送率RDeliveryを適宜加重又は調整し得る。別の例では、フローコントローラ510は、フロー制御システム306により監視される「天気」パラメータに基づいて蒸発指数を計算し、蒸発指数に基づいて全体流体輸送率RDeliveryを決定し得る。任意選択的に、次に、フローコントローラ510は、上述した監視される「作業現場動作」パラメータ(例えば、機械積載量、交通量等)及び/又は「作業現場表面」パラメータ(例えば、傾き又は傾斜、表面組成等)のうちの1つ又は複数に基づいて、全体流体輸送率RDeliveryを変更し得る。別の例では、フローコントローラ510は、メモリに記憶された「ベースライン」流体輸送率を有し、監視される様々なパラメータの値が各「ベースライン」値から逸脱する量に応じて、ベースライン流体輸送率を変更又は調整し得る。個々の流体輸送率成分が負の値を有し、それにより、他の正の流体輸送率成分と結合された場合に全体流体輸送率RDeliveryを低減し得ることにも留意する。例えば、大量の降雨が所定の期間にわたって作業現場100で予想される場合、作業現場降雨流体輸送率成分RWPは負の値を有し得る。別の例では、作業現場100での湿度が特定の閾値よりも大きい場合、湿度流体輸送率成分RHは負の値を有し得る。したがって、全体流体輸送率RDeliveryを計算する例示的な方法は、本開示の範囲の制限を決して意図せず、本開示の原理を示すことのみを意図する。開示される原理による流体輸送率RDeliveryを計算する追加の方法が、本開示を研究した上で、当業者に明らかになり得る。
【0107】
流体輸送機106は、流体輸送経路600を移動しながら速度を変えるため、移動速度に関係なく所望の全体流体輸送率RDelivery(例えば、l/m2/h)を維持するために、流体がスプレーヘッド202から噴霧される実際の率(例えば、l/分)を調整する必要があり得ることを理解されたい。したがって、流体輸送機106が、流体輸送経路600を移動しながら速度を増大又は低減する場合、流体輸送システム304は、移動速度に基づいて実際の流体出力率を適宜増大又は低減して、所望の全体流体輸送率RDeliveryを維持し得る。
【0108】
さらに、フローコントローラ510は、降雨センサ540により検出される降雨率に基づいて流体輸送率RDeliveryを変更又は調整し得る。作業現場100での降雨率に基づいて流体輸送率RDeliveryを低減することは、行われる場合、資源の制約を助け、作業現場100の水のやり過ぎを回避し得る。例えば、作業現場100で小雨が降っている場合、流体輸送率RDeliveryをそれに従って低減し得る。したがって、流体輸送機106が流体輸送経路600を移動する際、フローコントローラ510は、降雨センサ540から受信する信号に基づいて降雨率(例えば、現在の降雨率又は所定の時間期間にわたる降雨率)を計算し、計算された降雨率を流体輸送率RDeliveryから差し引いて、変更流体輸送率を得ることができる。
【0109】
さらに、フローコントローラ510は、降雨センサ540により検出される降雨率に基づいて流体輸送率RDeliveryを変更又は調整し得る。作業現場100での現在の降雨率に基づいて流体輸送率RDeliveryを低減することは、行われる場合、資源の制約を助け、作業現場100の水のやり過ぎを回避し得る。例えば、作業現場100で小雨が降っている場合、流体輸送率RDeliveryをそれに従って低減し得る。したがって、流体輸送機106が流体輸送経路600を移動する際、フローコントローラ510は、降雨センサ540から受信する信号に基づいて現在の降雨率を計算し、計算された降雨率を流体輸送率RDeliveryから差し引いて、変更流体輸送率を得ることができる。
【0110】
図8を続けると、ステップ808において、フローコントローラ510は、スプレーヘッド202の噴霧の分配又は幅を決定し得る。例えば、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を参照し、路幅情報列714から対応する路幅値(例えば、幅狭、中間、幅広、xm等)を検索し得る。検索された路幅値に基づいて、フローコントローラ510は、スプレーヘッド202の噴霧の分配又は幅(例えば、幅狭、中間、幅広等)を選択し得る。
【0111】
ステップ810において、フローコントローラ510は、流体輸送機106が作業現場100の除外ゾーン内にあるか否かを判断し得る。例えば、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を参照し、除外ゾーン情報列722から対応する除外ゾーンインジケータ(例えば、「イエス」又は「ノー」)を検索し得る。代替又は追加として、フローコントローラ510は、機械ビジョン装置516及び作業現場地形マップ702を使用して、流体輸送機106が除外ゾーン内に配置されているか否かを判断し得る。例えば、流体輸送機106が流体輸送経路600を移動する際、フローコントローラ510は、流体輸送機106の近傍の作業現場100の表面上のポイントへの検知された距離及び方向を示す信号を機械ビジョン装置516から受信し得る。流体輸送機106の検知された距離及び方向並びに既知の位置に基づいて、フローコントローラ510は、作業現場座標系に対する検知ポイントの座標を特定し得る。次に、フローコントローラ510は、検知されたポイントの座標を、作業現場地形マップ702に記憶された対応するポイントの座標と比較して、一致するか否かを判断し得る。例えば、検知されたポイント及び記憶されているポイントの高さ(例えば、z座標)が許容差内で一致しない場合、フローコントローラ510は、「予想外の」物体(例えば、車両、作業者、建物等)が流体輸送機106の近傍の作業現場表面にあると判断し、流体輸送機106の位置を除外ゾーンとして扱い得る。換言すれば、フローコントローラ510は、機械ビジョン装置516により検知されるポイントが、高さに関して作業現場地形マップ702に記憶されている対応するポイントに一致しないと判断する場合、作業現場100上の流体輸送機106の位置が除外ゾーンであると判断し得る。
【0112】
フローコントローラ510は、ステップ810において、流体輸送機106が除外ゾーン内にないと判断する場合、ステップ812に進み得る。ステップ812において、フローコントローラ510は、オーバーライド命令を受信したか否かを判断し得る。オーバーライド命令は、オペレータインタフェース506又は作業現場制御施設108から受信される、流体輸送を停止させる信号の形態であることができる。例えば、流体輸送機106のオペレータは、昼休みの時間であると判断し、オペレータインタフェース506に流体輸送を停止させる入力を提供(例えば、「停止」ボタンを押下)し得る。或いは、自律制御の状況では、作業現場制御施設108は、流体輸送を停止させ、流体輸送機106にサービスの派遣位置に戻るように命令する信号を送信し得る。別の実施形態では、オペレータは、通行中の車両に対応するために、選択されたスプレーヘッド202(例えば、流体輸送機106の左側又は右側にある)への流体輸送を低減又は停止させる入力を提供し得る。
【0113】
フローコントローラ510は、ステップ812において、オーバーライド命令を受信したと判断する場合、ステップ814において、流体輸送率RDeliveryを低減し得る。例えば、フローコントローラ510は、流体輸送率RDeliveryをゼロに設定して、流体輸送の停止を命令し得る。次に、フローコントローラ510は、ステップ816において、フロー制御信号を生成又は変更し得る(例えば、上述したように)。しかし、フロー制御信号では、流体輸送率パラメータRDeliveryをゼロに設定して、流体輸送システム304に流体輸送の停止を命令し得る。或いは、オペレータが特定のスプレーヘッド202のみへの流体輸送の停止を選択した場合、フローコントローラ510は、流体輸送の負担がアクティブ(すなわち、「オン」の)スプレーヘッド202に分散するように、フロー制御信号を生成又は変更し得る。例えば、オペレータが、通行中の車両に対応するために、可動式流体輸送機106の左側での流体輸送の停止を選択した場合、フロー制御信号は、可動式流体輸送機106の右側にあるスプレーヘッド202に流体輸送の負担を分散し得る(例えば、スプレーヘッド202aに50%、スプレーヘッド202bに50%)。
【0114】
フローコントローラ510は、ステップ812において、オーバーライド命令を受信していないと判断する場合、ステップ816でのようにフロー制御信号を生成又は変更し得る。しかし、この場合、フローコントローラ510は、フロー制御信号の流体輸送率パラメータRDeliveryを、ステップ806において決定される値に設定し得る。加えて、フローコントローラ510は、流体輸送の負担がスプレーヘッド202で均等に分散するように、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3のそれぞれを33%に設定し得る。フローコントローラ510は、ステップ808において決定される噴霧の分配又は幅(例えば、幅狭、中間、又は幅広)に基づいて、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3を設定することもできる。換言すれば、フローコントローラ510は、ステップ806において決定された率RDelivery、ステップ808において決定された分配又は幅で、スプレーヘッド202への流体輸送の負担を分散させて作業現場100に流体を輸送するように、流体輸送システム304に命令し得る。
【0115】
フローコントローラ510は、ステップ810において、流体輸送機106が除外ゾーン内に配置されていると判断する場合、ステップ818に進み得る。ステップ818において、フローコントローラ510は、除外ゾーンが作業現場100上の物体によるものであるか、それとも作業現場100の地形若しくは表面特徴によるものであるかを判断し得る。例えば、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を識別し、除外ゾーン情報列722から対応する除外ゾーンのタイプ(例えば、「物体」又は「地形」)を検索し得る。代替又は追加として、フローコントローラ510は、上述したように、機械ビジョン装置516から受信する信号に基づいて、除外ゾーンが作業現場100上の物体に関連すると判断し得る。
【0116】
フローコントローラ510は、ステップ818において、除外ゾーンが作業現場100での地形又は表面特徴に関連すると判断する場合、上述したように、ステップ814に進み得る。例えば、フローコントローラ510は、流体輸送機106が交差点、困難な地形、不良な視界、又は車両オペレータに対する他の問題を有する作業現場100上の領域にあると判断する場合、流体輸送を停止させるか、又は流体輸送率RDeliveryを低減するように流体輸送システム304に命令し得る。しかし、この場合、流体輸送率RDeliveryをゼロに設定する代わりに、フローコントローラ510は、代替として、所定の割合(例えば、25%、50%、75%等)だけ、所定の量だけ、又は除外ゾーンへの対応に適切な他の任意の様式で流体輸送率RDeliveryを低減し得る。
【0117】
フローコントローラ510は、ステップ818において、除外ゾーンが作業現場100上の物体に関連すると判断する場合、ステップ820に進み得る。ステップ820において、フローコントローラ510は、流体輸送機106の進行方向に対する物体の方向を特定し得る。例えば、フローコントローラ510は、位置特定装置522及び向きセンサ524からの信号を解析し、流体輸送機106の位置及び進行方向のそれぞれを特定し得る。次に、フローコントローラ510は、機械ビジョン装置516から受信する信号に基づいて、流体輸送機106からの物体の距離及び方向を特定し得る。代替又は追加として、フローコントローラ510は、除外ゾーン情報列722から物体の位置を検索し得る。流体輸送機106の進行方向及び流体輸送機106からの物体の方向に基づいて、フローコントローラ510は、流体輸送機106の進行方向に対する物体の角度(例えば、0度から360度)を特定し得る。
【0118】
ステップ822において、フローコントローラ510は、流体輸送機106から物体への方向に基づいて、流体を輸送するスプレーヘッド202のうちの1つ又は複数を選択し得る。例えば、物体への噴霧を回避するために、フローコントローラ510は、物体の方向に噴霧しないスプレーヘッド202のみを選択し得る。例えば、流体輸送機106の進行方向(ステップ820において特定される)に対する物体の方向に基づいて、フローコントローラ510は、物体が流体輸送機106の前、右、後ろ、それとも左に配置されているかを判断し得る。一実施形態では、物体が移動方向に対して流体輸送機106の右側に配置されている場合、フローコントローラ510は、スプレーヘッド202a及び/又はスプレーヘッド202cのみを選択し得る。物体が流体輸送機106の左側に配置されている場合、フローコントローラ510は、スプレーヘッド202a及び/又は202bのみを選択し得る。物体が移動方向に対して流体輸送機106の背後に配置されている場合、フローコントローラ510はスプレーヘッド202aのみを選択し得る。
【0119】
ステップ822が完了すると、フローコントローラ510はステップ816に進み、上述したように、フロー制御信号を生成又は変更し得る。しかし、この場合、フローコントローラ510は、フロー制御信号の流体輸送率パラメータRDeliveryを、ステップ806において決定される値に設定し得る。加えて、フローコントローラ510は、ステップ822の結果に基づいて、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3を設定し得る。例えば、スプレーヘッド202aがステップ822において選択される場合、フローコントローラ510は、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3のそれぞれを100%、0%、及び0%に設定し得る。同様に、スプレーヘッド202a及び202bのみがステップ822において選択される場合、フローコントローラ510は、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3のそれぞれを50%、50%、及び0%に設定し得る。ステップ808で決定される噴霧の分配又は幅(例えば、幅狭、中間、又は幅広)に基づいて、選択されたスプレーヘッド202のフロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3を設定し得る。換言すれば、フローコントローラ510は、ステップ806において決定された流体輸送率RDelivery、ステップ808において決定された噴霧の分配又は幅で、ステップ822において選択されたスプレーヘッド202のみを使用して流体を輸送するように、流体輸送システム304に命令するフロー制御信号を生成し得る。
【0120】
フローコントローラ510は、作業現場情報データベース504及び天気情報データベース505を定期的又はリアルタイムで、受信される情報に基づいて更新することもできる。例えば、可動機102又は作業現場制御施設108は、可動機102の現在位置、積載量、及び傾斜に関する情報を流体輸送機106に定期的に通信し得、フローコントローラ510はこれらの情報を使用して、表面傾斜データ708、交通量情報716、機械積載量情報720、及び除外ゾーン情報722を更新し得る。加えて、作業現場人員は、自分の位置を流体輸送機106又は作業現場制御施設108に送信する通信装置を携帯し得、それらの位置は、除外ゾーン情報722の更新に使用することもできる。加えて、可動機102又は作業現場制御施設108は、交通事故(例えば、事故、摩擦の損失、交通渋滞等)への可動機102の関与に関する情報を通信し得、これらの情報は交通事故情報718の更新に使用し得る。作業現場制御施設から受信する天気リポートを使用して、天気情報データベース505を更新し得る。代替又は追加として、天気情報を検知システム500により収集して、天気情報データベース505を更新し得る。さらに、流体輸送機106のオペレータは、オペレータインタフェース505に情報を入力して、作業現場情報データベース504又は天気情報データベース505を更新し得る。
【0121】
作業現場制御施設108は、監視施設、中央データ施設、派遣制御施設、及び/又は可動機102と通信可能な別の施設を含み得る。フロー制御システム306のいくつかの要素について、流体輸送機106に配置されるものとして上述したが、これらの要素のうちの1つ又は複数を、代替又は追加として、作業現場制御施設108で実施してもよいことを理解されたい。例えば、フローコントローラ510を含むフロー制御システム306のいくつかの要素は、作業現場制御施設108に配置してもよい。検知システム500のセンサ(例えば、流体輸送機106又は作業現場100の他の位置に搭載される)は、それぞれが検知したパラメータの値を示す信号を作業現場制御施設108に通信し得る(例えば、ネットワーク110を介して)。作業現場制御施設108に収容されるフローコントローラ510は、次に、上述した開示される流体輸送決定を実行し、ネットワーク110を介してフロー制御信号を流体輸送機106に送信し得る。流体輸送機106に搭載された流体輸送システム304は、次に、上述したように、フロー制御信号に従って作業現場表面に流体を輸送し得る。
【0122】
ネットワーク110は、可動機102及び作業現場施設108に情報を伝えることが可能な任意のアナログ又はパケット交換ネットワークを含み得る。例えば、ネットワーク110は、インターネット、専用若しくは私設イントラネット、電話回線に基づくネットワーク(例えば、PSTN)、ローカルエリアネットワーク(LAN)、広域ネットワーク(WAN)、デジタル加入者回線(DSL)、及び/又は他の任意の適したネットワーク若しくはネットワーク要素を単独で、又は適した組み合わせで含み得る。ネットワーク110は、伝送制御プロトコル/インターネットプロトコル(TCP/IP)、ハイパーテキスト伝送プロトコル(HTTP)、SOAP、リモートプロシージャコール(RPC)、及び/又は当分野で既知の他の適した通信プロトコルに基づいて通信し得る。
【産業上の利用可能性】
【0123】
開示される実施形態は、変化する環境下又は動作状況下で流体を領域に輸送することが望ましい任意の環境に適用可能であり得る。例えば、上述したように、開示される実施形態は、採掘現場、掘削現場、又は材料貯蔵(例えば、石炭貯蔵)現場等の作業現場に流体を輸送して、作業現場埃状況を制御する可動式流体輸送車両に適用し得る。埃制御用途の他に、開示される流体輸送プロセスを使用して、道路又は他の作業現場表面を順調に維持し得る。例えば、水分を路面に適切な量、提供することは、路面の固定及び交通からの摩耗への耐性に役立ち得る。加えて、開示される流体輸送プロセスを使用して、カッティング、グレーディング、コンパクティング、又は他の建築動作のために作業現場表面を準備し得る。開示される実施形態は、農業用途で灌漑若しくは化学物質を撒くために、又は輸送用途で道路、滑走路、又は駐車場等に食塩水を撒いて、氷を溶かすためにも有用であり得る。加えて、開示される実施形態は、農薬散布、肥料撒き、虫処理、又は水処理用途(例えば、森林火災のリスクを軽減するため)等で飛行機に適用することもできる。
【0124】
さらに、フロー制御システムにより監視される様々な天気パラメータ、作業現場表面パラメータ、及び作業現場動作パラメータに基づいて流体輸送率を決定することにより、流体は、所望の状況(例えば、作業現場の埃)に必要な程度のみまで分配し得る。したがって、労働力、燃料、及び流体供給等の流体輸送資源を節約し得る。流体輸送率は、作業現場での安全状況を保証するために制御し得る。例えば、急な傾斜、交通量の多い領域、運搬領域、及び作業現場の他の問題のある領域には、流体の輸送を少なくして、摩擦を向上させ得る。さらに、流体輸送は、進行中の作業現場動さを妨げないように、車両、作業現場人員、建物、作業領域等を含む作業現場の領域では縮小又は全体的に停止させ得る。
【0125】
さらに、本開示の態様は概して、メモリに記憶されるものとして説明し得るが、当業者は、これらの態様を異なる種類のコンピュータプログラム製品若しくはコンピュータ可読記憶媒体に記憶し、又は異なる種類のコンピュータプログラム製品若しくはコンピュータ可読記憶媒体から読み取ってもよい。例えば、開示される流体輸送プロセスを実施するコンピュータプログラムは、コンピュータ可読記憶媒体に記憶し、且つ/又はコンピュータ可読記憶媒体から読み取り得る。コンピュータ可読記憶媒体は、コンピュータにより実行された場合、コンピュータに、特に、開示される流体輸送プロセスを実行させるコンピュータ実行可能命令を記憶し得る。例示的なコンピュータ可読記憶媒体は、ハードディスク、フロッピーディスク、磁気テープ、若しくは当分野で既知の他の磁気記憶装置等の磁気記憶装置、CD−ROM、DVD−ROM、若しくは当分野で既知の別の光学記憶装置等の光学記憶装置、及び/又はEPROM、フラッシュドライブ、若しくは当分野で既知の別の集積回路記憶装置等の電子記憶装置を含み得る。コンピュータ可読記憶媒体は、1つ若しくは複数の構成要素流体輸送システム304又はフロー制御システム306により又はそのようなシステム内で具現し得る。
【0126】
様々な変更及び変形を本開示の方法及びシステムに対して行うことが可能なことを当業者は理解されよう。方法及びシステムの他の実施形態が、本明細書の考慮並びに本明細書に開示される方法及びシステムの実施から当業者には明らかになろう。例えば、フロー制御システム306は、流体輸送率を決定する際に、上述したパラメータに対する追加、より少数、又は異なるパラメータを考慮に入れ得る。したがって、本明細書及び例が単なる例示として考えられることが意図され、本開示の真の範囲は、以下の特許請求の範囲及びその均等物によって示される。
【技術分野】
【0001】
本開示は、一般的には流体輸送システム及び方法に関し、より詳細には流体輸送を制御して輸送するシステム及び方法に関する。
【背景技術】
【0002】
採掘業界及び建築業界等の特定の業界に関連する作業環境は、望ましくない埃状況を受けやすい。例えば、採掘、掘削、建築、埋め立て、及び材料貯蔵に関連する作業現場は、作業現場表面を構成する物質の性質により、埃の影響を特に受けやすい場合がある。例えば、石炭、頁岩、岩等の作業現場表面は容易に浸食されるため、大量の埃を生じさせる傾向を有し得る。さらに、これらの現場で実行される典型的な作業オペレーションは、埃状況を悪化させるだけである。採掘現場では、例えば、切断動作、掘削動作、及び削り取り動作が、作業現場表面を破壊し、埃を生じさせ得る。加えて、そのような現場を移動する運搬トラック、ブルドーザー、ローダー、掘削機等の重機は、降下した埃をかき乱し、それにより、空気中の埃レベルを増大させ得る。
【0003】
不適切な埃状況は、作業現場での効率を低減するおそれがある。例えば、埃は視界を損ない、現場での作業オペレーションを邪魔し、機器の保守及び清掃の増大を必要とし得る。加えて、不適切な埃状況は、作業現場の人員の快適性、健康、及び安全性を損なうおそれがある。
【0004】
過去において、様々な装置及び方法が、作業現場の埃状況を制御するために使用されてきた。例えば、Carter,Jr等への(特許文献1)(’719号特許)には、作業現場埃状況に対処する方法及びシステムが開示されている。特に、’719号特許には、作業現場のあちこちの異なる位置に位置決めされた1つ又は複数のダストモニタを含むシステムを開示している。ダストモニタは、作業現場の各位置での埃レベルを監視し、監視された埃レベルを示す埃制御信号を生成する。システムに関連付けられたコントローラが、ダストモニタから信号を受信する。コントローラにより、特定のダストモニタの位置での埃レベルが閾値を超えて増大すると判断される場合、コントローラは信号を送信して、可動式埃制御機をそのダストモニタの位置に派遣し、埃状況に対処する(例えば、撒水及び/又は埃抑制)。
【0005】
’719号特許の埃制御システムは、作業現場での埃レベルの制御に役立ち得るが、このシステムはある意味で非効率的であり得る。例えば、このシステムは、作業現場の特定の位置で撒かれる水の量を監視又は制御することができない。したがって、このシステムは、埃レベル、環境要因、及び他の考慮事項に関係なく、各埃位置で同じように対処し得る。したがって、埃制御資源が、所望よりも非効率的に使用されるおそれがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第6,954,719号明細書
【特許文献2】米国特許出願第12/472,415号明細書
【発明の概要】
【0007】
本開示は、上述した1つ若しくは複数の欠点及び/又は当分野の他の問題を解消することに関する。
【0008】
一態様は、可動式流体輸送車両を使用して現場に流体を輸送する方法に関する。方法は、現場での可動式流体輸送機の位置を特定すること、及び現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定することを含み得る。方法は、決定された流体輸送率で、現場表面の可動式流体輸送機の位置に流体を輸送することをさらに含み得る。
【0009】
別の態様は、流体を現場に輸送する可動式流体輸送機に関する。可動式流体輸送機は、現場での可動式流体輸送機の位置を特定するように構成された位置特定装置と、現場に関連する情報を記憶する現場データベースと、フローコントローラとを含み得る。フローコントローラは、現場に関連する情報を使用して、現場での可動式流体輸送機の位置に基づいて流体輸送率を決定し、決定された流体輸送率に基づいてフロー制御信号を生成するように構成し得る。流体輸送機は、フロー制御信号に基づいて、決定された流体輸送率で現場の表面に流体を噴霧するように構成された流体輸送システムをさらに含み得る。
【0010】
別の態様は、可動式流体輸送機を使用して現場に流体を輸送する別の方法に関する。方法は、現場での可動式流体輸送機の位置を受信し、現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定し、決定された流体輸送率に基づいてフロー制御信号を生成し得る。方法は、フロー制御信号を可動式流体輸送機に送信することをさらに含み得る。
【0011】
さらに別の態様は、可動式流体輸送機を使用して現場に流体を輸送する流体輸送システムに関する。システムは、現場での可動式流体輸送機の位置を示す信号を受信する通信装置と、現場に関連する情報を記憶する現場データベースと、フローコントローラとを含み得る。フローコントローラは、現場に関連する情報を使用して、現場での可動式流体輸送機の位置に基づいて流体輸送率を決定し、決定された流体輸送率に基づいてフロー制御信号を生成し、通信装置を介してフロー制御信号を可動式流体輸送機を送信するように構成し得る。
【図面の簡単な説明】
【0012】
【図1】開示される流体輸送プロセスを利用し得る例示的な作業現場の表現である。
【図2】開示される実施形態による例示的な可動式流体輸送機の表現である。
【図3】開示される実施形態による図2の可動式流体輸送機に関連する例示的な流体輸送制御システムの表現である。
【図4】開示される実施形態による図3の流体輸送制御システムに関連する例示的な流体輸送システムの表現である。
【図5】開示される実施形態による図3の流体輸送制御システムに関連する例示的な流体制御システムの表現である。
【図6】開示される実施形態による図5のフロー制御システムに関連する流体輸送情報データベースの例示的な内容の表現である。
【図7】開示される実施形態による図5のフロー制御システムに関連する作業現場情報データベースの例示的な内容の表現である。
【図8】開示される実施形態による図5に示されるフロー制御システムにより実行される例示的な流体輸送プロセスを示すフローチャートである。
【発明を実施するための形態】
【0013】
図1は、開示される流体輸送プロセスを利用し得る例示的な作業現場100を示す。一環境では、作業現場100は、採掘オペレーションが、作業現場人員に困難な状況を生み出す大きな埃レベルを生成する表面採掘現場を含み得る。例えば、埃は、視界を損ない、空気の質を低減し、機器の頻繁な保守及び清掃を必要とし、又はその他の様式でオペレーション作業現場100を妨害し得る。しかし、作業現場100が代替として、建築現場、埋め立て地、戦場ゾーン、地下作業現場、又は望ましくない埃状況が生じ得る他の任意の種類の作業現場を含み得ることを理解されたい。
【0014】
図1に示されるように、様々な可動機102が作業現場100で動作し得る。可動機102は、自律(すなわち、無人の)機械、半自律機械、又はオペレータ制御される機械の任意の組み合わせを含み得る。可動機102は、例えば、オフハイウェイ運搬トラック、連結トラック、掘削機、ローダー、ブルドーザー、スクレーパー、又は作業現場100を掘削若しくは関連する作業現場100からの物質を取り扱う他の種類の土木作業機械を含み得る。様々な作業オペレーションに関連して、可動機102は、運搬路104又は掘削位置間、投棄領域間、及び作業現場100の他の行先間の他の経路に沿って移動し得る。土木作業機械及び他のそのような重機の他に、可動機102は、1つ又は複数の可動式流体輸送機106を含むこともできる。流体輸送機106は、運搬路104に沿って作業現場100を移動し、流体(例えば、水及び/又は埃抑制剤)を作業現場100の表面に輸送して、埃レベルを制御するように構成し得る。様々なオペレーションに関連して、可動機102は、ネットワーク110を介して互いに通信し得るとともに、作業現場制御施設108と通信し得る。
【0015】
図2は、開示される実施形態による例示的な可動式流体輸送機106を示す。一実施形態では、流体輸送機106は、流体の輸送に使用するように改造されたオフハイウェイトラックであり得る。例えば、流体輸送機106は、特に、流体(例えば、水)を貯蔵するように構成された流体タンク200と、様々な配管、ホース、ポンプ、及び弁と、流体輸送機106が作業現場100のあちこちを移動する際に作業現場100の表面に流体を撒き、それにより、作業現場100での埃状況を制御するように構成された1つ又は複数のスプレーヘッド202とを装備し得る。スプレーヘッド202については、図4に関してさらに詳細に後述する。開示される流体輸送機106は代替として、水又は他の流体を多種多様な用途で分配するように組み立てられた別の種類の可動機を含み得ることを理解されたい。例えば、流体輸送機106は、農業設定では、タンクが備えられたトレーラーを牽引し、化学物質、水、又は他の材料(例えば、殺虫剤、肥料等)を分配するように構成されたトラクター、道路、滑走路、又は駐車場に食塩水を撒いて、雪及び氷を溶かすように構成されたオンハイウェイトラック、又は他の環境で流体を輸送するように構成された別の種類の車両を具現し得る。
【0016】
図3は、開示される実施形態による例示的な流体輸送制御システム302を示す。例示のために、流体輸送制御システム302は、流体輸送機106(例えば、採掘現場又は建築現場での放水トラックとして使用されるように組み立てられたオフハイウェイトラック)に適用されるものとして説明される。しかし、上述したように、流体輸送制御システム302は、他の様々な状況に適用可能であり得る。図3に示されるように、流体輸送制御システム302は、流体輸送システム304と、水等の流体を作業現場100の表面に分配して、埃状況を軽減するフロー制御システム306とを含み得る。オンボード流体輸送制御システム302は、通信装置308(例えば、アンテナ)を使用してネットワーク110を介して作業現場制御施設108及び他の可動機102と通信し得る。
【0017】
流体輸送システム304は、後述するように、フロー制御システム306に命令される率で流体(例えば、水)を作業現場100の表面に分配するように構成し得る。フロー制御システム306は、後述するように、状況下で適切な流体輸送率(例えば、l/m2/h単位)及び噴霧幅又は分配を決定し、決定率及び分配で流体を作業現場表面に出力するように流体輸送システム304に命令する所望の流量信号を出力するように構成し得る。
【0018】
図4は、流体輸送システム304の表現をさらに詳細に示す。示されるように、流体輸送システムは、動力を供給して、流体輸送機106を推進させ、流体輸送システム304に給電し、且つ/又は流体輸送機106に搭載された他のシステムに給電するように構成された動力源402(例えば、エンジン)を含み得る。すなわち、動力源402からの動力は、流体輸送機106に原動力を提供する以外の目的で使用することもできる。例えば、流体輸送用途用に構成される前のオフハイウェイトラックは、荷台の昇降等の補助用途に動力源402からの動力を使用するように設計されている場合がある。動力源402は、例えば、内燃エンジン、電気モータ、内燃エンジン−電気ハイブリッドシステム、又は当分野で既知の別の種類の動力源を含み得る。
【0019】
流体輸送システム304は、結合されて動力源402からの動力を受け取るトランスミッション404を含むこともできる。トランスミッション404は、段階的マニュアルトランスミッション、段階的オートマチックトランスミッション、自動連続可変トランスミッション、又は当分野で既知の他の任意の種類のトランスミッションを含み得る。トランスミッション404は、動力源402から動力出力を受け取り、選択された伝達比(例えば、ギア)に基づいて動力出力のトルクを変換し、変換された動力を1つ又は複数の摩擦装置(図示せず)(例えば、車輪、走行路、トレッド等)に結合して、流体輸送機106を推進し得る。加えて、トランスミッション404は、後述するように、変換された動力のうちのいくらかを流体輸送に結合し得る。
【0020】
流体輸送システム304は、油圧ポンプ408と、油圧モータ410とを含み得る。一実施形態では、ポンプ408は固定変位ポンプであり得、モータ410は可変変位モータであり得る。例えば、放水トラックとして使用するように構成されたオフハイウェイトラックは、流体を作業現場100に輸送する以外の目的ですでに配置された既存の固定変位ポンプ408を有し得る。可変変位モータ410の追加は、例えば、エンジン速度又は対地速度に関係なく流体流の制御を可能にすることにより、分配される流体量を制御するに当たり利点を提供し得る。このようにして、固定変位ポンプ408は引き続き、流体輸送パラメータの変さらにより影響を受けずに、流体輸送以外の用途に使用し得る。例えば、ポンプ408はモータ410を駆動し得、この流体をブレーキ構成要素(図示せず)の冷却に使用することもできる。ブレーキ冷却システムは、流体輸送システム304からの負荷変さらによる影響を受けなくてもよい。代替の実施形態では、ポンプ408及びモータ410は、可変変位ポンプ408及び固定変位モータ410又は可変変位ポンプ408及び可変変位モータ410等の固定及び/又は可変変位装置の他の適した組み合わせを含み得る。或いは、ポンプ408及びモータ410の代わりに、他の種類の開ループ又は閉ループ油圧システムを利用してもよい。
【0021】
図4を継続すると、ポンプ408の入力は、トランスミッション404に機械的又は他の様式で結合して、動力源402の変換された動力出力を受け取ることができる。そして、ポンプ408の出力は、周知の油圧手段を介して油圧モータ410の入力に油圧的に結合し得る。変換された動力出力は、ポンプ408を駆動して、油圧流体を油圧タンク412からポンプ408の出力を通して送り込み、それにより、モータ410を駆動し得る。そして、モータ410は、ポンプ408から送り込まれた油圧流体を受け取り、機械的出力を駆動し得、使われた油圧流体を油圧タンク412に戻し得る。モータ410の出力を機械的に結合して、流体ポンプ414を駆動し得る。一実施形態では、流体ポンプ414は固定変位ポンプであり得る。しかし、当業者は、所望であれば、可変変位ポンプ414を代わりに利用してもよいことを理解しよう。加えて、他の構成を使用してもよい。例えば、ポンプ408及びモータ410を省き、可変変位流体ポンプ414をトランスミッション404に直結してもよい。
【0022】
図4に示されるように、ポンプ414は、流体ライン416により流体タンク200(例えば、水タンク)(図2)、1つ若しくは複数のスプレーヘッド202(図2)、1つ若しくは複数のホースリール、及び/又は放水銃(図示せず)に流体的に結合し得る。ポンプ414は、モータ410により駆動され、流体ライン416を介して流体タンク200から流体(例えば、水)を引き込み、流体をスプレーヘッド202に輸送し得る。ホースリール及び放水銃は、作業現場100での埃制御及び/又は消火に使用し得る。
【0023】
そして、スプレーヘッド202は流体を作業現場100の表面に撒き、それにより、作業現場に水分を与えて、作業現場100での埃状況を制御し得る。スプレーヘッド202のそれぞれは、流体ライン416から流体を受け取る流入通路418を含み得る。スプレーヘッド202のそれぞれは流出オリフィス420を含むこともでき、流出オリフィス420を通して流体が作業現場100に撒かれる。スプレーヘッド202の具体的な構成は本開示にとって重要ではないが、一実施形態では、スプレーヘッド202は、参照により本明細書に援用される(特許文献2)に記載のスプレーヘッドを備え得る。しかし、本開示の趣旨及び範囲から逸脱せずに任意の種類のスプレーヘッド202を使用し得ることを理解されたい。
【0024】
図4に示される例では、3つのスプレーヘッド202が示される。図2に示されるように、第1のスプレーヘッド202aは、流体輸送機106の正面に向かって配置され、移動方向に対して流体輸送機106の左側及び/又は右側に噴霧するように構成し得る。第2のスプレーヘッド202bは、流体輸送機106の右側後部に配置され、移動方向に対して流体輸送機106の右側後部に噴霧するように構成し得る。第3のスプレーヘッド202cは、流体輸送機106の左側後部に配置され、移動方向に対して流体輸送機106の左側後部に噴霧するように構成し得る。しかし、任意の数のスプレーヘッド202を利用し得ることを理解されたい。さらに、スプレーヘッド202は、任意の所望位置又は向きで流体輸送機106に搭載して、作業現場100の適切なカバレッジを提供し得る。一実施形態では、スプレーヘッド202は、様々な噴霧が重ならずに、典型的な採掘運搬路の部分等の作業現場100の所定の表面積をカバーするのに適した幅を有する所望の噴霧パターンを提供するように位置決めし得る。
【0025】
図4は、共通の流体ライン416により接続されたスプレーヘッド202を示すが、スプレーヘッド202は独立して制御可能であり得る。例えば、オリフィス420は、全閉位置と全開位置との間で連続変更可能であり得る。或いは、オリフィス420は、全閉又は全開のみであることが可能であり得る。加えて、オリフィス420は、少なくとも流体輸送機106の移動方向に垂直な方向において、噴霧の幅又は分配(すなわち、広がり)を変更するように制御可能である。一実施形態では、例えば、オリフィス420は、幅狭噴霧、中間幅の噴霧、幅広噴霧、又は幅狭噴霧と幅広噴霧との間で連続変更可能な噴霧を提供するように制御可能である。このようにして、幅が様々な運搬路104に対処し得る。
【0026】
図4を継続すると、流体輸送システム304は、流体輸送システム304の様々な動作パラメータを検知するように構成された様々なセンサをさらに含み得る。例えば、流体輸送システム304は、センサの中でも特に、流体圧センサ422、動力源速度センサ424、及びトランスミッションセンサ426を含み得る。
【0027】
流体圧センサ422は、流体ライン416内の流体の圧力を検知するように配置し得る。或いは、流体圧センサ422は、流体流出ポンプ414の圧力を検知するように位置決めし得る。いずれの場合でも、流体圧センサ422は、検知された圧力の値(例えば、psi単位)を示す信号を出力し得る。流体圧センサ422は、例えば、容量圧力センサ、電磁圧センサ、ピエゾ抵抗歪みゲージ圧力センサ、圧電圧力センサ、光学圧力センサ、ポテンショメータ式圧力センサ、又は当分野で既知の他の任意の種類の圧力センサを含み得る。
【0028】
動力源速度センサ424は、動力源402の回転速度(例えば、出力シャフトの回転速度)を検知するように位置決めし得る。動力源速度センサ424は、動力源402の速度の値(例えば、RPM単位)を示す信号を出力し得る。動力源速度センサ424は、任意の種類のタコメータ又は当分野で既知の他の回転速度センサを含み得る。
【0029】
トランスミッションセンサ426は、トランスミッション404の1つ又は複数の動作パラメータを検知するように配置された1つ又は複数の装置を含み得る。例えば、トランスミッションセンサ426は、トランスミッション404が前進であるか、バックである、それともニュートラルであるか、並びにトランスミッション404のトルクと速度との比率(例えば、ギア)等のトランスミッション404の状態を検知し得る。トランスミッションセンサ426は、トランスミッション404の回転出力速度を検知することもできる。トランスミッションセンサ416は、これらの検知パラメータの1つ又は複数の値を示す1つ又は複数の信号を出力し得る。
【0030】
任意の上記センサ422〜426は、所望のパラメータを直接検知し、1つ又は複数の補助パラメータを検知して、所望のパラメータの値を導出し、又は他の何らかの間接的な手段により所望のパラメータの値を特定するように構成し得る。センサ422〜426の動作は当分野で周知であり、これ以上説明しない。
【0031】
流体輸送システム304は、流体輸送システム304の動作を制御するように構成された流体輸送コントローラ428をさらに含み得る。流体輸送コントローラ428は、例えば、流体輸送システム304の多くの機能を制御可能な汎用マイクロプロセッサ(例えば、電子制御モジュール)を具現し得る。流体輸送コントローラ428は、メモリ、補助記憶装置、プロセッサ(例えば、CPU)、又は流体輸送システム304の開示される機能を実行するプログラムを実行する他の任意の構成要素を含み得る。電源回路、信号調整回路、データ取得回路、信号出力回路、信号増幅回路、及び当分野で既知の他の種類の回路等の様々な他の回路を流体輸送コントローラ428に関連付け得る。
【0032】
図4に示されるように、流体輸送コントローラ428は、センサ422〜426と通信し得、ポンプ408、モータ410、及び/又はスプレーヘッド202に制御可能に接続し得る。流体輸送コントローラ428は、流体圧センサ422、動力源速度センサ424、及びトランスミッションセンサ426から信号を受信し得る。流体輸送コントローラ428は、流体制御システム306(図3)とも通信して、フロー制御信号を受信し得る。フロー制御信号は、流体輸送率RDelivery(例えば、l/m2/h単位)を示すことができ、フロー制御システム306は、この率でスプレーヘッド202から流体を出力するように流体輸送システム304に命令する。信号は、オンにすべき(すなわち、動作して流体を噴霧する)スプレーヘッド202、全体流体輸送率RDeliveryのスプレーヘッド202への相対的な割り振り(例えば、割合として)、及び所望の噴霧幅又は分配(例えば、幅狭、中間、又は幅広)をさらに示し得る。一実施形態では、例示的なフロー制御信号は以下のパラメータを含み得る:
<RDelivery,Delivery AmountHead1,
DistributionHead1, Delivery AmountHead2,
DistributionHead2, Delivery AmountHead3,
DistributionHead3, …>、
式中、RDeliveryは、フロー制御システム306により命令される全体流体輸送率(例えば、l/m2/h単位)を示し、Delivery AmountHead1は、スプレーヘッド202aに割り振られた流体輸送率の部分(例えば、33%)を示し、DistributionHead1は、スプレーヘッド202aの噴霧の幅又は分配(例えば、幅狭、中間、又は幅広)を示し、Delivery AmountHead2は、スプレーヘッド202bに割り振られた流体輸送率の部分(例えば、33%)を示し、DistributionHead2は、スプレーヘッド202bの噴霧の幅又は分配(例えば、幅狭、中間、又は幅広)を示し、Delivery AmountHead3は、スプレーヘッド202cに割り振られた流体輸送率の部分(例えば、33%)を示し、DistributionHead3は、スプレーヘッド202cの噴霧の幅又は分配(例えば、幅狭、中間、又は幅広)を示す。しかし、フロー制御信号を、より多数若しくはより少数のスプレーヘッド202に対応するように、又は所望であれば、異なる若しくは追加の流体輸送パラメータを含むように変更可能なことを理解されたい。
【0033】
流体輸送システム304の既知の特徴に基づいて、流体輸送コントローラ428は、フロー制御信号により命令される量及び分配又は幅(例えば、幅狭、中間、若しくは幅広)で流体を噴霧するようにオリフィス420を設定し得る。例えば、流体輸送コントローラ428は、所望の総フローの1/3を「幅広」噴霧として提供するようにオリフィス420aを制御し、所望の総フローの1/3を「幅広」噴霧として提供するようにオリフィス420bを制御し、所望の総フローの残りの1/3を「中間」幅噴霧として提供するようにオリフィス420cを制御し得る。
【0034】
次に、流体輸送コントローラ428は、フロー制御信号により示される流体輸送率RDeliveryを維持するために必要な流体輸送システム304の対応する内部流体圧を特定し得る。例えば、流体輸送コントローラ428のメモリは、スプレーヘッドオリフィス420の可能な様々な設定に関して様々な流体輸送率RDeliveryを流体輸送システム304の対応する内圧(すなわち、流体圧センサ422からの信号により示される流体ライン416又はポンプ414の出力での圧力)にマッピングする1つ又は複数のルックアップテーブルを記憶し得る。流体輸送システム304の適切な圧力を特定すると、流体輸送コントローラ428は、その圧力を維持するために適切な可変変位モータ410(及び/又はポンプ408)の変位を決定し得る。例えば、流体輸送コントローラ428のメモリは、動力源402及び/又はトランスミッション404の様々な出力速度並びに流体輸送システム304の様々な圧力を、可変変位モータ410(及び/又はポンプ408)の対応する変位値にマッピングする1つ又は複数のルックアップテーブルをさらに記憶し得る。モータ410(及び/又はポンプ408)の適切な変位を決定すると、流体輸送コントローラ428はそれに応答してモータ410(及び/又はポンプ408)を制御して、その変位を保持し、それにより、所望の流体輸送率を維持し得る。代替又は追加として、流体輸送コントローラ428は、上記参照した情報を使用し、それに応答してスプレーヘッドオリフィス420を制御して、流体輸送率RDeliveryを維持し得る。
【0035】
図5は、フロー制御システム306の表現をさらに詳細に示す。示されるように、フロー制御システム306は、フローコントローラ510と通信する検知システム500と、流体輸送情報データベース502と、作業現場情報データベース504と、天気情報データベース505と、オペレータインタフェース506と、ネットワークインタフェース508とを含み得る。検知システム500は、開示される流体輸送プロセスに関連する異なるパラメータを検知する様々な装置を含み得る。一実施形態、検知システム500は、機械動作検知システム512及び環境検知システム514の両方を含み得る。
【0036】
機械動作検知システム512は、開示される流体輸送プロセスに関連する流体輸送機106の異なる動作パラメータを検知する様々な検知装置を含み得る。例えば、機械動作検知システム512は、機械ビジョン装置516と、操縦角センサ518と、摩擦装置速度センサ520と、機械位置特定装置522と、機械向きセンサ524とを含み得る。
【0037】
機械ビジョン装置516は、流体輸送機106に位置決めされ、機械ビジョン装置516の視野内の作業現場100の表面上のポイント(例えば、物体)への距離及び方向を検出するように構成された装置を含み得る。機械ビジョン装置516は、LIDAR(光検出・測距)装置、RADAR(電波検出・測距)装置、SONAR(音波航法・測距)装置、カメラ装置、又は作業現場100の表面上のポイントへの距離及び方向を検出し得る他の任意の種類の装置を含み得る。機械ビジョン装置516は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100の表面上のポイントへの距離及び方向を示す信号を生成し、フローコントローラ510に通信し得る。一態様では、流体輸送機106は作業現場100のあちこちを移動し、機械ビジョン装置516を使用して、作業現場の表面上の物体(例えば、他の可動機102、作業現場人員、作業現場基盤等)を検出し、流体輸送を中止又は変更すべきであるかを判断し得る。例えば、サービス車両、別の機械102、機器、又は作業者が流体輸送機106の近傍で検出される場合、そのような物体への流体の噴霧を回避するために、流体輸送を中止又は変更することが望ましいことがある。
【0038】
さらに、機械ビジョン装置516を使用して、スプレーヘッド202を監視して、流体輸送システム304が適宜機能しているか否かを判断し得る。例えば、1つ又は複数の機器ビジョン装置516を位置決めして、スプレーヘッド202から噴霧される流体を監視し得る。機械ビジョン装置516が、スプレーヘッド202から噴霧されることが期待される流体量未満を検出する(例えば、スプレーヘッドがいくらかの流体を噴霧すべき場合に、流体がスプレーヘッド202から噴霧されない)場合、流体輸送システム304が適宜機能していないと判断し得る。そのような判断に基づいて、1つ又は複数の是正処置を取り得る。例えば、流体輸送システム304は診断モードになることができ、それにより、スプレーヘッド202、流体ライン416、又は流体輸送システム304の他の要素がパージ(例えば、詰まり除去)される。
【0039】
操縦角センサ518は、流体輸送機106の操縦角を検知又は他の様式で特定するように構成された任意の装置を含み得る。操縦角センサ518は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に特定された操縦角を示す信号を生成し、フローコントローラ510に通信する。例えば、流体輸送機106が運搬路104の湾曲部を通って移動している場合、流体輸送を低減又は変更することが望ましいことがある。
【0040】
摩擦装置速度センサ520は、流体輸送機106の1つ又は複数の摩擦装置526(例えば、車輪)の速度を特定するように構成された任意の装置を含み得る。摩擦装置速度センサ520は、後述するように、開示される流体輸送プロセスに使用するために、摩擦装置526の特定された速度を示す信号を生成し、フローコントローラ510に通信する。
【0041】
機械位置特定装置522は、作業現場100での流体輸送機106のリアルタイム位置を特定するように構成された任意の装置を含み得る。位置特定装置522は、複数の位置から高周波低電力無線又はレーザ信号を受信して解析し、流体輸送機106の相対位置(例えば、緯度及び経度)を三角測量し得る。例えば、位置特定装置522は、電子全地球測位システム(GPS)受信器、全地球的航法衛星システム(GNSS)受信器、又は1つ若しくは複数の衛星から信号を受信し、信号に基づいて流体輸送機106の位置を特定するように構成された別の種類の受信器を含み得る。代替又は追加として、機械位置特定装置522は、1つ又は複数の送信局から信号を受信し、送信局の既知の位置に対する流体輸送機106の相対的な2D又は3D位置を特定するように構成されたローカル無線又はレーザシステムを含み得る。代替又は追加として、位置特定装置522は、慣性基準ユニット(IRU)、走行距離計測又は推測航法による位置決め装置、又は流体輸送機106の相対的な2D若しくは3D位置をリアルタイムで受信若しくは特定するように動作可能な別の既知の位置特定装置を含み得る。位置特定装置522は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100での流体輸送機106の位置(例えば、緯度及び経度)を示す信号を生成し、フローコントローラ510に通信し得る。
【0042】
機械向きセンサ524は、作業現場100の表面上の流体輸送機106の進行方向及び傾斜(すなわち、向き)を特定するように構成された任意の装置を含み得る。例えば、向きセンサ524は、レーザレベルセンサ、傾斜センサ、傾斜計、無線方位測定器、ジャイロコンパス、フラックスゲートコンパス、或いは流体輸送機106が作業現場100のあちこちを移動する際の流体輸送機106の相対的なピッチ、ヨー、及び/又はロールを特定するように動作可能な別の既知の装置を含み得る。流体輸送機106のピッチ、ヨー、及びロールの成分の組み合わせが、流体輸送機106の位置での作業現場100の表面の相対的な傾き又は傾斜を示し得ることを理解されたい。向きセンサ524は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に流体輸送機106の進行方位及び傾斜を示す信号を生成し、フローコントローラ510に通信し得る。
【0043】
図5を継続すると、環境検知システム514は、開示される流体輸送プロセスに関連して、作業現場100に関連する異なる「天気」又は「環境」パラメータを検知する様々な検知装置を含み得る。例えば、環境検知システム514は、周囲温度センサ528と、太陽放射線センサ530と、大気圧センサ532と、湿度センサ534と、ダストセンサ536と、風センサ538と、降雨センサ540と、水分センサ541と、時計542とを含み得る。
【0044】
温度センサ528は、作業現場100の周囲温度を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、温度センサ528は、アナログ若しくはデジタル温度センサ、抵抗温度検出器(RTD)、サーモカプラ、サーモウェル、又は当分野で既知の他の任意の種類の温度センサを含み得る。温度センサ528は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100の検知される周囲温度の値(例えば、摂氏、華氏、ケルビン単位)を示す信号を生成し、フローコントローラ510に通信し得る。
【0045】
放射線センサ530は、作業現場100での太陽放射線の強度を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、放射線センサ530は、全天日射計、純放射計、量子センサ、光量計、ボロメータ、熱電対列、フォトダイオード、又は広帯域太陽放射線束密度を検知する他の任意の既知の装置を含み得る。放射線センサ530は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に太陽放射線の検知された強度の値(例えば、W/m2単位)を示す信号を生成し、フローコントローラ510に通信し得る。
【0046】
圧力センサ532は、作業現場100の大気圧を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100のどこかに位置決めされる)任意の装置を含み得る。圧力センサ532は、容量圧力センサ、電磁圧力センサ、ピエゾ抵抗歪みゲージ圧力センサ、圧電圧センサ、光学圧力センサ、ポテンショメータ式圧力センサ、又は当分野で既知の他の任意の種類の大気圧センサ等の気圧センサを含み得る。圧力センサ532は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に検知される大気圧(例えば、atm単位)の値を示す信号を生成し、フローコントローラ510に通信し得る。
【0047】
湿度センサ534は、作業現場100での湿度を検知するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、湿度センサ534は、電気湿度計、ヘアテンション比重計(hair tension hydrometer)、乾湿計、又は湿度を検知する当分野で既知の他の任意の装置を含み得る。湿度センサ534は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に検知される湿度の値(例えば、単位容量空気当たりの水の質量を単位とする)示す信号を生成し、フローコントローラ510に通信し得る。
【0048】
ダストセンサ536は、ダストセンサ536の特定の位置での空気の埃状況若しくは埃レベル又は作業現場100の全体的な相対埃レベルを特定するように構成された任意の装置(例えば、流体輸送機106又は運搬路104の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、ダストセンサ536は、空気サンプルを収集し、一定強度の光線を光源から光センサに向かって空気に通し、光源と光センサとの間の透光干渉を測定し得る。ダストセンサ536は、干渉の大きさに基づいて空気中の埃の密度を特定し得る。ダストセンサ536は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に空気中の埃の密度の値(例えば、ppm単位)を示す信号を生成し、フローコントローラ510に通信し得る。当分野で既知の代替又は追加の種類のダスト監視装置又は方法を使用してもよいことを理解されたい。
【0049】
風センサ538は、作業現場100又はその近傍での風の速度及び方向を特定するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、風センサ538は、レーザドップラー風速計、超音波風速計、熱線風速計、又はタービン風速計等の速度風速計、プレート風速計若しくは管風速計等の圧力風速計、又は当分野で既知の他の任意の種類の風センサを含み得る。風センサ538は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に検知される風の速度及び方向の値(例えば、4km/h NW)を示す信号を生成し、フローコントローラ510に通信し得る。
【0050】
降雨センサ540は、作業現場100での降雨量又は降雨率を特定するように構成された任意の装置(例えば、流体輸送機106又は作業現場100の静止位置若しくは近傍に位置決めされる)を含み得る。例えば、降雨センサ540は、レインスイッチ、降雨ゲージ、又は他の任意の種類の当分野で既知の降雨検知装置を含み得る。降雨センサ540は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場100の降雨量及び降雨率の値を示す信号を生成し、フローコントローラ510に通信し得る。
【0051】
水分センサ541は、作業現場100の表面の含水率(例えば、体積含水率)を特定するように構成された任意の装置を含み得る。例えば、1つ又は複数の水分センサ541は、流体輸送機106が移動する運搬路104に沿って等、作業現場100にわたる様々な位置で表面下に埋められて、それぞれの位置での作業現場表面の外水率を検知し得る。水分センサ541は、後述するように、開示される流体輸送プロセスに使用するために、リアルタイムで、又は周期的に作業現場表面の外水率の値を示す信号を生成し、フローコントローラ510に通信し得る。
【0052】
時計542は、現在の日時及び日付を特定し、後述するように、開示される流体輸送プロセスに使用するために、周期的に日時及び日付を示す信号をフローコントローラ510に通信し得る。一態様では、時刻及び日にちは、上述した他のセンサに関連する信号に添付するか、又は他の様式で含めることができる。
【0053】
環境検知システム514の様々なセンサを流体輸送機106に搭載して、又は作業現場100のあちこちの様々な場所に配置し得ることを理解されたい。すなわち、これらのセンサは必ずしも一緒に配置する必要はなくてもよい。例えば、センサによっては、流体輸送機106に配置し得るものもあれば、作業現場100の長さ及び幅にわたる(例えば、流体輸送機106が移動する運搬路104に沿った)1つ又は複数のステーションに配置し得るものもある。加えて、異なる数の各種のセンサを利用し得る。例えば、いくつかのダストセンサ536及び水分センサ541は、運搬路104に沿って間隔を置く等の作業現場100の様々な位置に提供して、作業現場100の埃レベル及び含水率の局所化された指標を提供し得る。他方、おそらく1つ又は2つのみの降雨センサ540、風センサ538、温度センサ528、圧力センサ534、及び湿度センサ534を地所の周辺又は中央位置(例えば、作業現場制御施設108)等の作業現場100に提供して、これらのパラメータに関する作業現場100での状況のより大域的な指標を提供し得る。任意の遠隔センサが、検知される各パラメータの値を示す信号を、ネットワーク110、無線通信、赤外線通信等を介してフローコントローラ510に無線で通信し得る。さらに、フロー制御システム306が、上記以外のパラメータを検知するように構成されたより少数又は異なる種類のセンサを利用し得ることを理解されたい。
【0054】
流体輸送情報データベース502は、流体輸送機106が流体を輸送する作業現場100の位置を識別し、その位置での適切な流体輸送率を決定できるようにする情報を含み得る。例えば、図6に示されるように、流体輸送情報データベース502は、流体輸送経路600と、1つ又は複数の流体輸送率成分曲線602とを含み得る。
【0055】
流体輸送経路600は、流体輸送機106が、作業現場表面に流体を輸送しながら移動し得る作業現場100にわたる所定の経路を示す情報を含み得る。例えば、流体輸送経路600は、流体輸送機106が移動して、作業現場100の埃の影響を受けやすい領域に対処し得る一連のポイントを示し得る。ポイントは、緯度及び経度座標、作業現場座標、又は他の種類の座標で定義し得る。一実施形態では、流体輸送経路600を作業現場管理者又は技術者により設定し得る。例えば、作業現場管理者又は技術者は、作業現場100の特定の領域を埃の影響を受けやすい領域(例えば、運搬路104)として識別し、対応する流体輸送経路600を設定することができ、流体輸送機106が、作業現場のオペレーション、利用可能な資源、又は他の要因を考慮して効率的にこれらの領域に対処できるようにする。流体輸送経路600は、オペレータインタフェース506に表示されて、流体輸送機106のオペレータが、流体輸送経路600を移動するように流体輸送機106を制御できるようにし得る。或いは、自律制御シナリオでは、流体輸送機106は、流体輸送経路600を移動するように流体輸送機106を自動的に制御し得る自律制御システム(図示せず)を含み得る。流体輸送経路600は、流体輸送機106が経路を移動する適切な速度(例えば、3km/h)を示す情報を含むこともできる。
【0056】
輸送率成分曲線602は、フロー制御システム306により監視される環境パラメータ及び機械動作パラメータの値に基づいて、フロー制御システム306が様々な状況下での適切な流体輸送率を決定できるようにする任意の情報を含み得る。一実施形態では、輸送率成分曲線602は、フロー制御システム306により監視されるパラメータのうちの1つ又は複数の値(例えば、周囲温度、大気圧、湿度等)を、対応する流体輸送率成分にマッピングし得る。これらの個々の流体輸送率成分の組み合わせ又は和が、全体流体輸送率RDelivery(すなわち、流体が作業現場表面に噴霧される率)を定義し得る。したがって、各流率成分曲線602は、全体流体輸送率RDeliveryの、それぞれのパラメータに起因し得る部分のみを定義し得る。輸送率成分曲線602は、ルックアップテーブル、マップ、公式、又は監視されるパラメータと対応する流体輸送率成分との関係を定義する他の任意の手段としてフローコントローラ510のメモリに記憶し得る。
【0057】
一実施形態では、輸送率成分曲線602は、経験的データ又は作業現場100についての他の知識に基づいて作業現場の管理者又は技術者により設定し得る。例えば、過去の経験に基づいて、作業現場管理者は、望ましくない埃状況の発生を回避するために、「通常」状況下で流体を特定の「基本」率(例えば、1.5l/m2/h)で作業現場100に輸送すべきであることを知り得る。これらの通常状況は、フロー制御システム306により監視されるパラメータのうちの1つ又は複数(例えば、特定の周囲温度、大気圧、湿度等)の所定のベースライン値に対応し得る。
【0058】
通常状況での基本流率を確立すると、作業現場管理者又は技術者は、全体流体輸送率RDeliveryに対する監視される各パラメータの重みを決定し、それにより、監視される各パラメータのベースライン流体輸送率成分(すなわち、各パラメータの所定値に対応するベースライン成分率)を定義し得る。例えば、湿度を周囲温度よりも重く加重することができ、周囲温度を大気圧よりも重く加重することができ、埃レベルを風速より重く加重することができる。したがって、監視される異なるパラメータの各ベースライン流体輸送率成分の和又は組み合わせは、全体ベースライン流体輸送率に等しくなり得る。次に、作業現場管理者又は技術者は、ベースライン流体輸送率成分が、対応する監視パラメータの値の変化に伴って変化し得る量を定義することにより、輸送率成分曲線602を生成し得る。例えば、作業現場管理者は、作業現場100での周囲温度に起因する流体輸送率成分を周囲温度範囲0℃〜40℃にわたって0.1l/m2/h〜0.3l/m2/hで線形に変化させるべきであると決定し得る。換言すれば、作業現場管理者又は技術者は、作業現場100での温度変化が、全体流体輸送率の特定の範囲内の変化のみに影響し得る(すなわち、その他の変数を一定に保った状態で)ように、周囲温度成分の加重を決定し得る。この情報に基づいて、次に、作業現場管理者又は技術者は、全体範囲にわたる温度の流体輸送率成分曲線を設定し得る。
【0059】
図6に示されるように、例示的な流体輸送率成分曲線602は、周囲温度曲線604、大気圧曲線606、太陽放射線曲線608、湿度曲線610、風速曲線612、埃レベル曲線614、表面組成曲線616、表面傾斜曲線618、道路プロファイル曲線620、交通量曲線622、交通事故曲線624、機械積載量曲線626、作業現場降雨曲線628、及び表面含水率曲線630を含み得る。
【0060】
周囲温度成分曲線604は、作業現場100での周囲温度T(例えば、摂氏単位)(x軸)と、周囲温度Tに起因し得る対応する流体輸送率成分RT(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、温度成分曲線604は、他の変数を一定に保った状態での作業現場100における周囲温度Tに基づく全体流体輸送率RDeliveryの部分のみを示し得る。一般に、作業現場100での周囲温度Tが高いほど、水分が蒸発して作業現場表面からなくなり得る率が高い(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、温度成分曲線604は一般に正の傾きを有し得、全体流体輸送率は周囲温度Tと共に増大する。
【0061】
大気圧成分曲線606は、作業現場100での大気圧P(例えば、atm単位)(x軸)と、大気圧Pに起因し得る対応する流体輸送率成分RP(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、温度成分曲線604のように、圧力成分曲線606は、他の変数を一定に保った状態での作業現場100における大気圧Pに基づく全体流体輸送率RDeliveryの部分のみを示し得る。一般に、作業現場100での大気圧Pが低いほど、水分が蒸発して作業現場表面からなくなり得る率が高い(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、圧力成分曲線606は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、大気圧Pが増大するにつれて低減する。圧力成分曲線606は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0062】
太陽放射線成分曲線608は、作業現場100での太陽放射線量SR(例えば、W/m2単位)(x軸)と、太陽放射線量SRに起因し得る対応する流体輸送率成分RSR(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、太陽放射線成分曲線608は、他の変数を一定に保った状態での作業現場100における太陽放射線量SRに基づく全体流体輸送率RDeliveryの部分のみを示し得る。一般に、作業現場100での太陽放射線量SRが高いほど、水分が蒸発して作業現場表面からなくなり得る率が高い(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、太陽放射線成分曲線608は一般に正の傾きを有し得、全体流体輸送率は太陽放射線量SRの増大に伴って増大する。太陽放射線成分曲線608は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0063】
湿度成分曲線610は、作業現場100での湿度H(例えば、立方メートルの空気当たりのグラム単位の水)(x軸)と、湿度Hに起因し得る対応する流体輸送率成分RH(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、湿度成分曲線610は、他の変数を一定に保った状態での作業現場100における湿度Hに基づく全体流体輸送率の部分のみを示し得る。一般に、作業現場100での湿度Hが増大するにつれて、水分が蒸発して作業現場表面からなくなる率は低減し得ることを理解されたい。したがって、図6に示されるように、湿度成分曲線610は一般に負の傾きを有し得、全体流体輸送率RDeliveryは湿度Hの増大に伴って低減する。湿度成分曲線610は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0064】
風速成分曲線612は、作業現場100での風速WS(例えば、km/h単位)(x軸)と、風速WSに起因し得る対応する流体輸送率成分RWS(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、風速成分曲線612は、他の変数を一定に保った状態での作業現場100における風速WS(例えば、km/h単位での平均風速)に基づく全体流体輸送率の部分のみを示し得る。一般に、作業現場100での風速WSが増大するにつれて、水分が蒸発して作業現場表面からなくなり得る率も増大し得る(そして、作業現場100で埃状況を制御するために必要な流体輸送率が高い)ことを理解されたい。したがって、図6に示されるように、風速成分曲線612は一般に正の傾きを有し得、全体流体輸送率RDeliveryは風速WSの増大に伴って増大する。風速成分曲線612は、上述したその他の成分曲線のように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0065】
埃レベル成分曲線614は、作業現場100で検知された埃レベルD(例えば、ppm単位)(x軸)と、埃レベルDに起因し得る対応する流体輸送率成分RD(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、埃レベル成分曲線614は、他の変数を一定に保った状態で、作業現場100で検知された埃レベルDに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、他の変数に関わりなく、埃レベルが閾値を超える場合、又は埃レベルが増大する場合、追加の流体を作業現場表現に輸送すべきであると判断し得る。したがって、図6に示されるように、埃レベル成分曲線614は一般に正の傾きを有し得、全体流体輸送率RDeliveryは検知される埃レベルDが増大するにつれて増大する。埃レベル成分曲線614は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0066】
表面組成成分曲線616は、作業現場表面の組成SC(すなわち、物質の種類)(x軸)と、表面組成に起因し得る対応する流体輸送率成分RSC(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、表面組成成分曲線616は、作業現場表面を構成する物質の種類に基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、他の変数に関わりなく、作業現場表面を構成する物質の種類に応じて、流体をより高い又はより低い率で輸送すべきであると判断し得る。「埃の少ない」物質よりも「埃が多い」物質には、流体をより高い率で輸送して、望ましくない埃状況の作業現場100での発生の回避に役立てることが望ましいことがある。したがって、一実施形態では、異なる種類の作業現場表面物質が、物質が風化して埃を生成し易い程度の分布に沿って分類することができ、表面組成成分曲線616は、分布に基づいて生成し得る。例えば、石炭、頁岩、及び岩を「埃の多い」物質と分類し、その一方で、表土及びオイルサンドを「埃の少ない」ものとして分類し得る。したがって、図6に示されるように、表面組成成分曲線616は一般に正の傾きを有し得、全体流体輸送率RDeliveryは、その他の変数を一定に保つ場合、「埃の少ない」物質よりも「埃の多い」物質の場合に大きくなる。
【0067】
表面傾斜成分曲線618は、作業現場表面の傾き又は傾斜θSI(例えば、水平に対する度を単位とする)(x軸)と、傾き又は傾斜θSIに起因し得る対応する流体輸送率成分RθSI(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、表面傾斜成分曲線618は、作業現場表面の傾き又は傾斜θSIに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、作業現場100の平坦又は水平な領域よりも作業現場100の急傾斜領域では流体をより低い率で輸送すべきであると判断し得る。これは、上り坂又は下り坂を移動中の可動機102に追加の摩擦を提供する等の安全対策のために望ましいことがある。したがって、図6に示されるように、表面傾斜成分曲線618は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、その他の変数を一定に保つ場合、作業現場表面の傾き又は傾斜θSIが増大するにつれて低減する。
【0068】
道路プロファイル成分曲線620は、作業現場100での道路の湾曲半径RC(例えば、m単位)と、道路の湾曲半径に起因し得る対応する流体輸送率成分RRC(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、道路プロファイル成分曲線620は、作業現場100での道路(例えば、運搬路104)の湾曲の程度に基づく全体流体輸送率の部分のみを示し得る。例えば、作業現場管理者又は技術者は、直線路面よりも湾曲した路面(例えば、カーブ又は交差点)で流体をより低い率で輸送して、作業現場100で可動機102又は採掘サービス車両が、カーブ、交差点等に対応しながら、摩擦を失わないように、又はスリップを回避するのに役立てるべきであると判断し得る。したがって、図6に示されるように、道路プロファイル成分曲線620は一般に負の傾きを有し得、全体流体輸送率は、その他の変数を一定に保つ場合、道路の湾曲RCが増大するにつれて低減する。
【0069】
交通量成分曲線622は、作業現場100での交通量TV(例えば、車両数/h単位)と、交通量に起因し得る対応する流体輸送率成分RTV(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、交通量成分曲線622は、その他の変数を一定に保った状態での作業現場100における交通量TVに基づく全体流体輸送率RDeliveryの部分のみを示し得る。タイヤ、走行路、トレッド、又は可動機102の他の摩擦装置からの摩耗が、作業現場表面を撹拌して壊し、埃を生成し得ることを理解されたい。さらに、行き交う交通からの空気流が、作業現場をより急速に乾燥させ得る。加えて、作業現場100の交通量の多い領域は、交通量の少ない領域よりも多くの作業現場人員、作業領域、作業活動、又はオペレーション、機械等を含む傾向を有し得る。したがって、作業現場管理者又は技術者は、交通量の多い作業現場表面の撹拌増大を補償するため、且つ交通量の多い領域で埃に露出され得る作業人員、機械、プロジェクト等が追加されることに鑑みて、作業現場100の交通量の少ない領域よりも、作業現場100の交通量の多い領域で、流体をより高い率で輸送すべきであると判断し得る。したがって、図6に示されるように、交通量成分曲線622は一般に正の傾きを有し得、全体流体輸送率は、その他の変数を一定に保つ場合、交通量TVの増大に伴って増大する。
【0070】
交通事故成分曲線624は、作業現場100で報告された交通事故TI(例えば、事故数又は交通量に対する交通事故数の比率)と、交通事故TIに起因し得る対応する流体輸送率成分RTI(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、交通事故成分曲線624は、その他の変数を一定に保った状態での報告された交通事故TIに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、交通事故の多い領域での摩擦を向上させるために、交通事故が発生しやすい領域又は交通事故が過去に発生した領域に対して、作業現場100のその他の領域よりも流体を低い率で輸送すべきであると判断し得る。交通事故は、例えば、車両スリップ事故、衝突、交通渋滞等を含み得る。したがって、図6に示されるように、交通事故成分曲線624は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、交通事故TIの増大に伴って低減する。交通事故成分曲線624は、経験的データ、交通調査データ、作業現場表面についての知識、又は作業現場100についての他の情報に基づいて特定し得る。
【0071】
機械積載量成分曲線626は、作業現場100での可動機102の積載量L(例えば、最大積載量の割合としての平均利用積載容量)と、積載量Lに起因し得る対応する流体輸送率成分RL(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、機械積載量成分曲線626は、その他の変数を一定に保った状態での作業現場における可動機102の積載量Lに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、可動機102に摩擦の増大を提供して、積載を安全に運ぶために、可動機102が作業現場100の他の領域よりも重い積載を運ぶ作業現場100の領域では、流体をより低い率で輸送すべきであると判断し得る。したがって、図6に示されるように、機械積載量成分曲線626は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、他の変数を一定に保った状態で、機械積載量が増大するにつれて低減する。機械積載量成分曲線626は、経験的データ、交通調査データ、作業現場表面についての知識、又は作業現場100についての他の情報に基づいて特定し得る。
【0072】
作業現場降雨成分曲線628は、作業現場100での降雨量WP(例えば、cm単位)と、降雨量WPに起因し得る対応する流体輸送率成分RWP(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、作業現場降雨成分曲線628は、その他の変数を一定に保った状態での作業現場100における降雨量WPに基づく全体流体輸送率RDeliveryの部分のみを示し得る。例えば、作業現場管理者又は技術者は、作業現場100に最近、雨が降った場合、又は作業現場100に近い将来、雨が降ると予期される場合、必要とされる流体輸送率RDeliveryが低いと判断し得る。これは、例えば、流体輸送資源を節約し、作業現場100に過度の水を撒くことを回避するために望ましいことがある。したがって、図6に示されるように、作業現場降雨成分曲線628は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、作業現場100での降雨量WPが増大するにつれて低減する。一実施形態では、作業現場降雨成分曲線628のx軸上の各位置は、所定の時間期間(例えば、現在時刻の数日前から現在時刻の数日後まで)にわたる作業現場100での降雨量WPに対応し得る。したがって、作業現場降雨成分曲線628は、最近降った雨の量と、予期される将来の降雨量(例えば、天気情報データベース505からの天気報告情報)とに基づいて、流体輸送率成分RWPを定義し得る。作業現場降雨成分曲線628は、経験的データ、交通調査データ、作業現場表面についての知識、又は作業現場100についての他の情報に基づいて特定し得る。
【0073】
含水率成分曲線630は、作業現場100の表面の含水率M(例えば、容積含水率)(x軸)と、含水率Mに起因し得る対応する流体輸送率成分M(例えば、l/m2/h単位)(y軸)との関係を定義し得る。すなわち、含水率成分曲線630は、その他の変数を一定に保った状態での作業現場表面の含水率Mに基づく全体流体輸送率の部分のみを示し得る。一般に、高い含水率を有する作業現場表面の部分は、低い含水率を有する作業現場の部分よりも乾燥して埃を生成する可能性が低い(又は乾燥して埃を生成するまでに長い時間がかかる)ことを理解されたい。加えて、作業現場表面のそのような部分は、追加の流体を吸収する容量が低く、追加の流体がこれらの領域に輸送された場合、貯留水を生じさせるおそれがある。したがって、作業現場表面の含水率の高い部分では、他の変数を一定に保った状態で、作業現場表面の含水率の低い領域よりも低い流体輸送率を必要とし得る。したがって、図6に示されるように、含水率成分曲線630は一般に負の傾きを有し得、全体流体輸送率RDeliveryは、作業現場方面含水率Mの増大に伴って低減する。含水率成分曲線630は、上述したように、経験的データ又は作業現場100についての他の情報に基づいて特定し得る。
【0074】
図5に戻ると、作業現場情報データベース504は、フロー制御システム306が、流体輸送率成分曲線602と併せて使用して、流体輸送機106が流体輸送経路600を移動する際に流体を作業現場表面に輸送する率RDeliveryをリアルタイムで決定し得る、作業現場100についての情報を含み得る。作業現場情報データベース504は、フローコントローラ510に関連するメモリに記憶し得る。図7は、作業現場情報データベース504に含まれる情報の例示的な表現を示す。示されるように、作業現場情報データベース504は、例えば、作業現場地形マップ702と、作業現場メタデータテーブル704とを含み得る。
【0075】
作業現場地形マップ702は、数学的座標において作業現場100の表面を定義する電子マップを含み得る。座標は、作業現場座標系、全地球測位座標系(例えば、緯度及び経度の座標)、又は他の任意の種類の座標系に基づき得る。
【0076】
作業現場メタデータテーブル704は、マップ、ルックアップテーブル、行列、又は作業現場100の特徴を定義する情報を含む別のデータ記憶構造を含み得る。例えば、作業現場メタデータテーブル704は、作業現場表面上の位置706に従ってインデックス付けることができ、作業現場表面位置706に対応する表面傾斜データ708、表面組成データ710、道路プロファイル情報712、路幅情報714、交通量情報716、交通事故情報718、機械積載量情報720、除外ゾーン情報722、及び太陽露出情報724を含み得る。作業現場メタデータテーブル704は、作業現場調査情報、経験的データ、又は作業現場100に関連する他のリポート若しくは情報に基づいて作業現場管理者又は技術者により作成し得る。代替又は追加として、作業現場メタデータテーブル704は、作業現場100の他の可動機102により通信される情報、作業現場制御施設108から受信する情報、又はオペレータインタフェース506を介して流体輸送機106のオペレータにより入力される情報に基づいて、フローコントローラ510により定期的又はリアルタイムで更新し得る。
【0077】
作業現場表面位置706は、作業現場メタデータテーブル704の列を含み得、列の各行は作業現場表面上の異なる位置に対応する。例えば、作業現場100を所定サイズ(例えば、25m2)のセルを有するx−y格子に分割し得、作業表面位置列706の各行は、作業現場100の異なるセルに対応し得る。
【0078】
表面傾斜データ708は、作業現場表面の傾き又は傾斜θSIについての情報を含み得る。例えば、表面傾斜データ708は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行により識別される作業現場100のセル内の作業現場表面の傾き又は傾斜θSI(例えば、水平に対する割合等級又は程度)を示し得る。一実施形態では、表面傾斜データ708は、作業現場100のセルの平均傾き又は傾斜を示し得る。
【0079】
表面組成データ710は、作業現場表面を組成する物質SCの種類についての情報を含み得る。例えば、表面組成データ710は作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内の表面を組成する物質SCの種類の分類を示し得る。例えば、各セルは、作業現場100のセル内の表面物質の風化及び埃生成のし易さの分布(例えば、「埃が少ない」から「埃が多い」までの1から10の尺度等)に沿って分類し得る。
【0080】
道路プロファイル情報712は、作業現場100での道路のプロファイルについての情報を含み得る。例えば、道路プロファイル情報712は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内に配置された任意の道路の湾曲半径RC(例えば、m単位)を示し得る。
【0081】
路幅情報714は、作業現場100の道路の幅についての情報を含み得る。例えば、路幅情報714は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内に配置された任意の道路の幅を示し得る。一実施形態では、路幅情報714は、道路の幅を単位長(例えば、メートル)で示し得る。代替又は追加として、路幅情報714は、道路を狭い、中程度、又は広いとして分類し得る。後述するように、フローコントローラ510は路幅情報714を使用して、スプレーヘッド202の適切な噴霧幅若しくは分配を決定し、且つ/又はオン若しくはオフにする特定のスプレーヘッド202を選択し得る。
【0082】
交通量情報716は、作業現場100の車両交通量TVについての情報を含み得る。例えば、交通量情報716は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内の車両交通量TVを示し得る。例えば、交通量情報716は、合計車両数(例えば、過去からその時点までの合計)又は1時間当たりのセル通行車両数で作業現場100のセル内の交通量TVを示し得る。
【0083】
交通事故情報718は、作業現場100で発生し、報告された交通事故TIについての情報を含み得る。例えば、交通事故情報718は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内で発生し、報告された交通事故TIの数(例えば、セルの過去からその時点までの合計)を示し得る。代替又は追加として、交通事故情報718は、作業現場100のセル内の交通量に対する報告交通事故数の比率として、又は作業現場100のセルでの交通事故の発生し易さの程度を示す別の様式で表現し得る。上で示したように、「交通事故」は、衝突、スリップ事故、交通渋滞、又は他の任意の種類の交通事象を指し得る。
【0084】
機械積載量情報720は、作業現場100を移動中の可動機102の積載量Lについての情報を含み得る。例えば、機械積載量情報720は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセル内を移動中の可動機102の積載量を示し得る。換言すれば、機械積載量情報720は、作業現場100の特定のセルを移動中の可動機102(例えば、貨物を有する)の積載の程度を示し得る。例えば、可動機102の積載量は、運搬トラックが荷積み位置と荷下ろし位置との間で1つ又は他の物質を運ぶ作業現場100の領域で比較的高くなり得る。一実施形態では、機械積載量情報720は、作業現場100のセル内を移動する可動機102の平均利用積載容量(例えば、運ばれる最大貨物量の割合)として表現し得る。別の実施形態では、機械積載量情報720は、作業現場100のセル内で可動機102により運ばれる平均貨物量(例えば、トン単位)として表現し得る。しかし、機械積載量情報720を他の方法で表現してもよいことを理解されたい。
【0085】
除外ゾーン情報722は、流体輸送が禁止又は他の様式で制限される作業現場100の領域を識別し得る。例えば、作業現場管理者又は技術者は、建物、可動機102、車両、機械、基盤、作業現場人員、作業プロジェクト(例えば、掘削又は建築プロジェクト)等を含む作業現場100の領域を、これらの領域での流体噴霧が進行中の作業動作を妨げるおそれがあるため、除外ゾーンとして定義し得る。別の例では、作業現場管理者又は技術者は、交差点、困難な地形(例えば、急峻な地形若しくは交通事故がよく発生する地形)、不良な視界、又は車両運転手にとっての他の問題を有する作業現場100の領域を、これらの領域での流体噴霧がこれらの領域を滑りやすく又は車両交通を危険にし得るため、除外ゾーンとして定義し得る。一実施形態では、除外ゾーン情報722は、作業現場メタデータテーブル704の列を含み得、列の各行は、作業現場表面位置列706のその行に対応する作業現場100のセルが除外領域−流体輸送が禁止又は制限される作業現場100の領域−を含むか否かを示す情報(例えば、「イエス」又は「ノー」)を含み得る。
【0086】
さらなる態様では、除外ゾーン情報722は、除外ゾーンの種類又は作業現場100への特定の領域への流体輸送が禁止若しくは制限される理由を示すこともできる。一実施形態では、除外ゾーン情報722は、作業現場100の領域が物体(例えば、車両、可動機102、建物、作業員、静止機械、基盤等)を含むか否か、又は作業現場100の領域が作業現場表面又は地形特徴(例えば、問題のある地形、交差点、不良な視界等)を含むか否かを示し得る。
【0087】
太陽露出情報724は、日付及び日時に基づいて作業表面が太陽放射線に露出されているか否かを示す情報を含み得る。例えば、太陽露出情報724は、作業現場メタデータテーブル704の列を含み得、列の各行は、季節(例えば、春、夏、秋、冬)及び日時(例えば、朝、昼、夕)に基づいて、作業現場表面位置列706のその行に対応するセルが太陽放射線に露出されているか否か(例えば、日向又は日陰)を示し得る。いくつかの作業現場が、地形、日時、及び季節に応じて太陽放射線に露出され得るか、又は露出され得ない領域を有することを理解されたい。例えば、深く開けた採掘坑の領域によっては、朝遅くから昼の早い時間までしか直接の太陽放射線に露出されない領域があり得る。
【0088】
図5に戻ると、天気情報データベース505は、フローコントローラ510のメモリに記憶し得、作業現場100に関連する天気情報を含み得る。天気情報は、例えば、作業現場100の過去の天気情報と、作業現場100の天気予報情報とを含み得る。一実施形態では、天気情報は、作業現場100の温度、太陽放射線レベル、雲量、湿度レベル、気圧、降雨率、降雨量、又は他の天気データを示し得る。
【0089】
オペレータインタフェース506は、モニタ、タッチスクリーン、キーパッド、制御パネル、キーボード、ジョイスティック、レバー、ペダル、ホィール、又はオペレータからの入力を受け取り、又はオペレータに出力を提供する当分野で既知の他の任意の装置を含み得る。開示される流体輸送プロセスに関連して、オペレータインタフェース506は、機械オペレータから入力を受信し得、対応するコマンド信号をフローコントローラ510に通信し得る。オペレータインタフェース506は、フローコントローラ510から受信する信号に基づいて情報を機械オペレータに対して表示することもできる。
【0090】
ネットワークインタフェース508は、ネットワーク110を介してデータを送受信する任意のハードウェア又はソフトウェアを含み得る。例えば、ネットワークインタフェース508は、モデム、Ethernet通信装置、光ファイバ通信装置、セルラ通信装置、赤外線通信装置、衛星通信装置、及び/又はネットワーク110を介してデータを送受信可能な他の任意のネットワーク通信装置を含み得る。したがって、ネットワークインタフェース508は、衛星、セルラ、赤外線、電波、又は他の種類の無線通信信号を使用して通信するように構成し得る。
【0091】
フローコントローラ510は、開示される流体輸送プロセスに関連して情報の監視、記録、記憶、インデックス付け、処理、又は通信を行う手段を含み得る。フローコントローラ510は、メモリと、補助データ記憶装置(例えば、磁気若しくは光学ディスクドライブ)、プロセッサ(例えば、CPU)、又はフロー制御システム306の開示される機能を実行するプログラムを実行する他の任意の構成要素を含み得る。電源回路、信号調整回路、データ取得回路、信号出力回路、信号増幅回路、及び当分野で既知の他の種類の回路等の他の様々な回路が、フローコントローラ510に関連し得る。
【0092】
フローコントローラ510は、機械動作検知システム512及び環境検知システム514の様々なセンサから信号を受信し得、検知されたパラメータに関連する値をメモリに記憶して、後述するように後続処理に使用し得る。可動式流体輸送機106に配置されないセンサ(例えば、ダストセンサ536又は水分センサ541)の場合、フローコントローラ510は、センサのそれぞれの既知の位置に従って様々なパラメータ値をインデックス付け得る。例えば、フローコントローラ510は、作業現場表面上のセンサの位置を識別する座標(例えば、緯度及び経度)を、センサにより測定されるパラメータ(例えば、温度、圧力、埃レベル、含水率等)の実際の値に関連付け得る。
【0093】
一実施形態では、フローコントローラ510は、作業現場100での埃状況を制御するために、(1)流体を作業現場表面に輸送するのに適した率RDeliveryと、(2)流体輸送の適した幅又は分配(すなわち、スプレーヘッド202からの噴霧の幅又は分配)を決定するように構成し得る。詳細に後述するように、フローコントローラ510は、機械動作検知システム512及び環境検知システム514のセンサのうちの1つ又は複数から受信する信号、流体輸送情報データベース502、作業現場情報データベース504、及び/又は天気情報データベース505に含まれる情報、オペレータインタフェース506から受信する情報、並びに/或いは可動機102又は作業現場制御施設108から受信する情報に基づいて、流体輸送率RDelivery及び分配を決定し得る。
【0094】
図8は、流体輸送機106が流体輸送経路600(例えば、運搬路104)を移動する際に、開示される実施形態によりフローコントローラ510が実行し得る例示的な流体輸送決定プロセス800を示す。ステップ802において、フローコントローラ510は、上述した流体輸送パラメータのうちの1つ又は複数の値を特定し得る。例えば、フローコントローラ510は、上述した「天気」又は「環境」パラメータのうちの1つ又は複数の値をまず特定し得る。特に、フローコントローラ510は、温度センサ528、圧力センサ532、放射線センサ530、湿度センサ534、及び風センサ538から受信する各信号に基づいて、作業現場100での周囲温度T(例えば、℃単位)、大気圧P(例えば、atm単位)、太陽放射線SR(例えば、W/m2単位)、湿度H(例えば、立方メートルの空気当たりのグラム単位の水)、及び風速WS(例えば、km/h単位)の値を特定し得る。代替又は追加として、フローコントローラ510は、天気情報データベース505からこれらのパラメータの値を検索し得る。加えて、フローコントローラ510は、天気情報データベース505を使用して、作業現場100での(例えば、所定の時間期間にわたる)最近及び予想される降雨量WPの値(例えば、cm単位)を特定し得る。フローコントローラ510は、代替又は追加として、降雨センサ540により収集される降雨データに基づいて、作業現場100での最近及び予想される降雨量WPの値を特定し得る。
【0095】
ステップ802に関連して、フローコントローラ510は、上述した「作業現場表面」パラメータのうちの1つ又は複数の値も特定し得る。特に、フローコントローラ510は、作業現場100上の流体輸送機106の位置での埃レベルD(例えば、ppm単位)、作業現場表面の含水率M(例えば、体積含水率)、表面組成SC(例えば、「埃が多い」又は「埃が少ない」)、傾き又は傾斜θSI(例えば、水平からの等級又は程度の割合で)、及び道路プロファイルRP(例えば、m単位の湾曲半径)の値を特定し得る。例えば、ダストセンサ536が可動式流体輸送機106に配置される場合、フローコントローラ510は、ダストセンサ536から受信される信号(例えば、メモリに記憶される)に基づいて、作業現場100での流体輸送機106の位置での埃レベルDの値を特定し得る。1つ又は複数のダストセンサ536が作業現場表面のあちこちの異なる位置に位置決めされる場合、フローコントローラ510は、可動式流体輸送機106の最近傍に配置されたダストセンサ536の信号に基づいて、埃レベルDの値を特定し得る。代替又は追加として、フローコントローラ510は、作業現場表面で可動式流体輸送機106の近傍の複数のダストセンサ536の信号により示される値を平均化することにより、埃レベルDの値を特定し得る。
【0096】
同様に、フローコントローラ510は、水分センサ541から受信する信号(例えば、メモリに記憶される)に基づいて、流体輸送機106の位置での作業現場表面の含水率Mの値を特定し得る。1つ又は複数の水分センサ541が作業現場表面のあちこちの異なる位置に位置決めされる場合、フローコントローラ510は、可動式流体輸送機106の最近傍に配置された水分センサ541の信号に基づいて、作業現場表面の含水率Mの値を特定し得る。代替又は追加として、フローコントローラ510は、可動式流体輸送機106の近傍にある複数の水分センサ541の信号又は作業現場100上の他の位置にある水分センサ541の信号により示される値を平均化することより、作業現場表面の水分率Mの値を特定し得る。
【0097】
フローコントローラ510は、作業現場メタデータテーブル704を使用して作業現場100の流体輸送機106の位置での作業現場表面組成の値SC(例えば、「埃が多い」又は「埃が少ない」)を特定し得る。特に、フローコントローラ510は、位置特定装置522から受信する信号に基づいて、流体輸送機106の位置を特定し得る。次に、フローコントローラ510は、作業現場表面位置列706内のその位置を参照し、表面組成データ列710から対応する表面組成値SCを検索し得る。
【0098】
同様に、フローコントローラ510は、作業現場メタデータテーブル704の作業現場表面位置列706で流体輸送機106の位置を参照し、作業現場表面傾斜データ列708から対応する傾き又は傾斜値θSIを検索することにより、流体輸送機106の位置での作業現場表面の傾き又は傾斜の値θSIを特定し得る。フローコントローラ510は、代替又は追加として、向きセンサ524から受信する信号に基づいて、又は作業現場地形マップ702を使用して流体輸送機106の位置での勾配若しくは傾きを計算することにより、傾き又は傾斜値θSIを特定し得る。
【0099】
フローコントローラ510は、作業現場メタデータテーブル704を使用して流体輸送機106の位置での道路(例えば、運搬路104)の湾曲半径RCを特定することもできる。特に、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を参照し、道路プロファイル情報列712から対応する湾曲半径RCを検索し得る。代替又は追加として、フローコントローラ510は、操縦角センサ518から受信する信号に基づいて道路の湾曲半径RCを特定し得る。
【0100】
さらに、ステップ802に関連して、フローコントローラ510は、上述した「作業動作」パラメータのうちの1つ又は複数の値を特定し得る。特に、フローコントローラ510は、作業現場100の流体輸送機106の位置での交通量TV(例えば、車両数/h)、交通事故TI(例えば、交通事故数又は交通量に対する交通事故の比率)、及び機械積載量L(例えば、平均利用積載容量の割合)の値を特定し得る。
【0101】
例えば、フローコントローラ510は、作業現場メタデータテーブル704を使用して作業現場100の流体輸送機106の位置での交通量の値TVを特定し得る。特に、フローコントローラ510は、位置特定装置522から受信する信号に基づいて流体輸送機106の位置を特定し得る。次に、フローコントローラ510は、作業現場表面位置列706でその位置を参照し、交通量情報列716から対応する交通量値TVを検索し得る。フローコントローラ510は同様に、交通事故情報列718及び機械積載量情報列720のそれぞれから流体輸送機106の位置での交通事故TI及び機械積載量Lの値を検索し得る。
【0102】
ステップ804において、フローコントローラ510は、ステップ802において特定された流体輸送パラメータの値に基づいて流体輸送率成分を特定し得る。例えば、フローコントローラ510は、温度成分曲線604、圧力成分曲線606、太陽放射線成分曲線608、湿度成分曲線610、風速曲線612、作業現場降雨曲線628、埃レベル曲線614、表面組成成分曲線616、表面傾斜曲線618、道路プロファイル曲線620、交通量曲線622、交通事故曲線624、機械積載量曲線626、及び含水率成分曲線630のそれぞれで、ステップ802において特定された周囲温度T、大気圧P、太陽放射線SR、湿度H、風速WS、最近又は予想される作業現場降雨WP、埃レベルD、表面組成SC、傾き若しくは傾斜θSI、道路プロファイルRP、交通量TV、交通事故TI、機械積載量L、及び表面含水率Mの値を参照し得る。次に、フローコントローラ510は、これらの成分曲線602から、流体輸送率成分の各値:
RT、RP、RSR、RH、RWS、RWP、RD、RSC、RθSI、RRP、RTV、RTI、RVL、及びRM
を特定し得る。
【0103】
一実施形態では、フローコントローラ510は、流体輸送機106の位置での作業現場表面の傾き又は傾斜θSIを考慮するように、太陽放射線流体輸送率成分RSRを変更し得る。場合によっては、水平(すなわち、平らな地面)に相対する作業現場100での太陽放射線SRの強度を特定し得ることを理解されたい。例えば、放射線センサ530は、水平面に位置決めし得、又は天気情報データベース505が、水平地面に相対してとられた太陽放射線測定を含み得る。したがって、測定される太陽放射線値SRは、作業現場表面の傾いた部分又は傾斜した部分での太陽放射線傾斜の真の強度を反映しない場合がある。したがって、一実施形態では、フローコントローラ510は、作業現場表面での流体輸送機106の位置での傾き又は傾斜θSIに基づいて、太陽放射線流体輸送率成分RSRを調整し得る。例えば、フローコントローラ510は、RSR’=RSRsin(θSI)に従って調整太陽放射線流体輸送率成分RSR’を計算することができ、式中、RSRは、太陽放射線成分曲線608から特定される太陽放射線流体輸送率成分であり、θSIは、流体輸送機106の位置での作業現場表面の傾き又は傾斜である。
【0104】
代替又は追加として、フローコントローラ510は、作業現場メタデータテーブル704に基づいて、太陽放射線流体輸送率成分RSRの所定の値を選択し得る。例えば、フローコントローラ510は、時計542から受信する信号に基づいて日時及び日付を特定し得る。次に、フローコントローラ510は、作業現場メタデータテーブル704の作業現場表面位置列706で、位置特定装置522からの信号により示される流体輸送機106の位置を参照し得る。次に、フローコントローラ510は、太陽露出情報列724から、日時及び日付に対応する太陽露出情報(例えば、日向又は日陰)を検索し得る。次に、フローコントローラ510は、太陽露出情報(例えば、日向又は日陰)を所定の太陽放射線値SR(例えば、W/m2単位)に変換し、太陽放射線成分曲線608上でその値を参照して、対応する太陽放射線流体輸送率成分RSRを検索し得る。
【0105】
ステップ806において、フローコントローラ510は、ステップ804において特定された流体輸送率成分に基づいて、全体流体輸送率RDeliveryを決定し得る。一実施形態では、フローコントローラ510は、流体輸送率成分を以下のように加算することにより、全体流体輸送率RDeliveryを決定し得る。
RDelivery=RT+RP+RSR+RH+RWS+RWP+RD+RSC+RθSI+RRP+RTV+RTI+RVL+RM
【0106】
しかし、フローコントローラ510が全体流体輸送率RDeliveryを他の方法で決定してもよいことを理解されたい。例えば、フローコントローラ510は、上述したパラメータのすべてがフロー制御システム306により監視される訳ではない場合等、上述した流体輸送率成分のすべて未満を使用して、全体流体輸送率RDeliveryを決定してもよい(例えば、温度、圧力、湿度、及び表面傾斜のみ)。そのような場合、フローコントローラ510は、流体を作業現場表面に適切な率で輸送するために、これらの個々の流体輸送率成分及び/又は流体輸送率RDeliveryを適宜加重又は調整し得る。別の例では、フローコントローラ510は、フロー制御システム306により監視される「天気」パラメータに基づいて蒸発指数を計算し、蒸発指数に基づいて全体流体輸送率RDeliveryを決定し得る。任意選択的に、次に、フローコントローラ510は、上述した監視される「作業現場動作」パラメータ(例えば、機械積載量、交通量等)及び/又は「作業現場表面」パラメータ(例えば、傾き又は傾斜、表面組成等)のうちの1つ又は複数に基づいて、全体流体輸送率RDeliveryを変更し得る。別の例では、フローコントローラ510は、メモリに記憶された「ベースライン」流体輸送率を有し、監視される様々なパラメータの値が各「ベースライン」値から逸脱する量に応じて、ベースライン流体輸送率を変更又は調整し得る。個々の流体輸送率成分が負の値を有し、それにより、他の正の流体輸送率成分と結合された場合に全体流体輸送率RDeliveryを低減し得ることにも留意する。例えば、大量の降雨が所定の期間にわたって作業現場100で予想される場合、作業現場降雨流体輸送率成分RWPは負の値を有し得る。別の例では、作業現場100での湿度が特定の閾値よりも大きい場合、湿度流体輸送率成分RHは負の値を有し得る。したがって、全体流体輸送率RDeliveryを計算する例示的な方法は、本開示の範囲の制限を決して意図せず、本開示の原理を示すことのみを意図する。開示される原理による流体輸送率RDeliveryを計算する追加の方法が、本開示を研究した上で、当業者に明らかになり得る。
【0107】
流体輸送機106は、流体輸送経路600を移動しながら速度を変えるため、移動速度に関係なく所望の全体流体輸送率RDelivery(例えば、l/m2/h)を維持するために、流体がスプレーヘッド202から噴霧される実際の率(例えば、l/分)を調整する必要があり得ることを理解されたい。したがって、流体輸送機106が、流体輸送経路600を移動しながら速度を増大又は低減する場合、流体輸送システム304は、移動速度に基づいて実際の流体出力率を適宜増大又は低減して、所望の全体流体輸送率RDeliveryを維持し得る。
【0108】
さらに、フローコントローラ510は、降雨センサ540により検出される降雨率に基づいて流体輸送率RDeliveryを変更又は調整し得る。作業現場100での降雨率に基づいて流体輸送率RDeliveryを低減することは、行われる場合、資源の制約を助け、作業現場100の水のやり過ぎを回避し得る。例えば、作業現場100で小雨が降っている場合、流体輸送率RDeliveryをそれに従って低減し得る。したがって、流体輸送機106が流体輸送経路600を移動する際、フローコントローラ510は、降雨センサ540から受信する信号に基づいて降雨率(例えば、現在の降雨率又は所定の時間期間にわたる降雨率)を計算し、計算された降雨率を流体輸送率RDeliveryから差し引いて、変更流体輸送率を得ることができる。
【0109】
さらに、フローコントローラ510は、降雨センサ540により検出される降雨率に基づいて流体輸送率RDeliveryを変更又は調整し得る。作業現場100での現在の降雨率に基づいて流体輸送率RDeliveryを低減することは、行われる場合、資源の制約を助け、作業現場100の水のやり過ぎを回避し得る。例えば、作業現場100で小雨が降っている場合、流体輸送率RDeliveryをそれに従って低減し得る。したがって、流体輸送機106が流体輸送経路600を移動する際、フローコントローラ510は、降雨センサ540から受信する信号に基づいて現在の降雨率を計算し、計算された降雨率を流体輸送率RDeliveryから差し引いて、変更流体輸送率を得ることができる。
【0110】
図8を続けると、ステップ808において、フローコントローラ510は、スプレーヘッド202の噴霧の分配又は幅を決定し得る。例えば、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を参照し、路幅情報列714から対応する路幅値(例えば、幅狭、中間、幅広、xm等)を検索し得る。検索された路幅値に基づいて、フローコントローラ510は、スプレーヘッド202の噴霧の分配又は幅(例えば、幅狭、中間、幅広等)を選択し得る。
【0111】
ステップ810において、フローコントローラ510は、流体輸送機106が作業現場100の除外ゾーン内にあるか否かを判断し得る。例えば、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を参照し、除外ゾーン情報列722から対応する除外ゾーンインジケータ(例えば、「イエス」又は「ノー」)を検索し得る。代替又は追加として、フローコントローラ510は、機械ビジョン装置516及び作業現場地形マップ702を使用して、流体輸送機106が除外ゾーン内に配置されているか否かを判断し得る。例えば、流体輸送機106が流体輸送経路600を移動する際、フローコントローラ510は、流体輸送機106の近傍の作業現場100の表面上のポイントへの検知された距離及び方向を示す信号を機械ビジョン装置516から受信し得る。流体輸送機106の検知された距離及び方向並びに既知の位置に基づいて、フローコントローラ510は、作業現場座標系に対する検知ポイントの座標を特定し得る。次に、フローコントローラ510は、検知されたポイントの座標を、作業現場地形マップ702に記憶された対応するポイントの座標と比較して、一致するか否かを判断し得る。例えば、検知されたポイント及び記憶されているポイントの高さ(例えば、z座標)が許容差内で一致しない場合、フローコントローラ510は、「予想外の」物体(例えば、車両、作業者、建物等)が流体輸送機106の近傍の作業現場表面にあると判断し、流体輸送機106の位置を除外ゾーンとして扱い得る。換言すれば、フローコントローラ510は、機械ビジョン装置516により検知されるポイントが、高さに関して作業現場地形マップ702に記憶されている対応するポイントに一致しないと判断する場合、作業現場100上の流体輸送機106の位置が除外ゾーンであると判断し得る。
【0112】
フローコントローラ510は、ステップ810において、流体輸送機106が除外ゾーン内にないと判断する場合、ステップ812に進み得る。ステップ812において、フローコントローラ510は、オーバーライド命令を受信したか否かを判断し得る。オーバーライド命令は、オペレータインタフェース506又は作業現場制御施設108から受信される、流体輸送を停止させる信号の形態であることができる。例えば、流体輸送機106のオペレータは、昼休みの時間であると判断し、オペレータインタフェース506に流体輸送を停止させる入力を提供(例えば、「停止」ボタンを押下)し得る。或いは、自律制御の状況では、作業現場制御施設108は、流体輸送を停止させ、流体輸送機106にサービスの派遣位置に戻るように命令する信号を送信し得る。別の実施形態では、オペレータは、通行中の車両に対応するために、選択されたスプレーヘッド202(例えば、流体輸送機106の左側又は右側にある)への流体輸送を低減又は停止させる入力を提供し得る。
【0113】
フローコントローラ510は、ステップ812において、オーバーライド命令を受信したと判断する場合、ステップ814において、流体輸送率RDeliveryを低減し得る。例えば、フローコントローラ510は、流体輸送率RDeliveryをゼロに設定して、流体輸送の停止を命令し得る。次に、フローコントローラ510は、ステップ816において、フロー制御信号を生成又は変更し得る(例えば、上述したように)。しかし、フロー制御信号では、流体輸送率パラメータRDeliveryをゼロに設定して、流体輸送システム304に流体輸送の停止を命令し得る。或いは、オペレータが特定のスプレーヘッド202のみへの流体輸送の停止を選択した場合、フローコントローラ510は、流体輸送の負担がアクティブ(すなわち、「オン」の)スプレーヘッド202に分散するように、フロー制御信号を生成又は変更し得る。例えば、オペレータが、通行中の車両に対応するために、可動式流体輸送機106の左側での流体輸送の停止を選択した場合、フロー制御信号は、可動式流体輸送機106の右側にあるスプレーヘッド202に流体輸送の負担を分散し得る(例えば、スプレーヘッド202aに50%、スプレーヘッド202bに50%)。
【0114】
フローコントローラ510は、ステップ812において、オーバーライド命令を受信していないと判断する場合、ステップ816でのようにフロー制御信号を生成又は変更し得る。しかし、この場合、フローコントローラ510は、フロー制御信号の流体輸送率パラメータRDeliveryを、ステップ806において決定される値に設定し得る。加えて、フローコントローラ510は、流体輸送の負担がスプレーヘッド202で均等に分散するように、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3のそれぞれを33%に設定し得る。フローコントローラ510は、ステップ808において決定される噴霧の分配又は幅(例えば、幅狭、中間、又は幅広)に基づいて、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3を設定することもできる。換言すれば、フローコントローラ510は、ステップ806において決定された率RDelivery、ステップ808において決定された分配又は幅で、スプレーヘッド202への流体輸送の負担を分散させて作業現場100に流体を輸送するように、流体輸送システム304に命令し得る。
【0115】
フローコントローラ510は、ステップ810において、流体輸送機106が除外ゾーン内に配置されていると判断する場合、ステップ818に進み得る。ステップ818において、フローコントローラ510は、除外ゾーンが作業現場100上の物体によるものであるか、それとも作業現場100の地形若しくは表面特徴によるものであるかを判断し得る。例えば、フローコントローラ510は、作業現場表面位置列706で流体輸送機106の位置を識別し、除外ゾーン情報列722から対応する除外ゾーンのタイプ(例えば、「物体」又は「地形」)を検索し得る。代替又は追加として、フローコントローラ510は、上述したように、機械ビジョン装置516から受信する信号に基づいて、除外ゾーンが作業現場100上の物体に関連すると判断し得る。
【0116】
フローコントローラ510は、ステップ818において、除外ゾーンが作業現場100での地形又は表面特徴に関連すると判断する場合、上述したように、ステップ814に進み得る。例えば、フローコントローラ510は、流体輸送機106が交差点、困難な地形、不良な視界、又は車両オペレータに対する他の問題を有する作業現場100上の領域にあると判断する場合、流体輸送を停止させるか、又は流体輸送率RDeliveryを低減するように流体輸送システム304に命令し得る。しかし、この場合、流体輸送率RDeliveryをゼロに設定する代わりに、フローコントローラ510は、代替として、所定の割合(例えば、25%、50%、75%等)だけ、所定の量だけ、又は除外ゾーンへの対応に適切な他の任意の様式で流体輸送率RDeliveryを低減し得る。
【0117】
フローコントローラ510は、ステップ818において、除外ゾーンが作業現場100上の物体に関連すると判断する場合、ステップ820に進み得る。ステップ820において、フローコントローラ510は、流体輸送機106の進行方向に対する物体の方向を特定し得る。例えば、フローコントローラ510は、位置特定装置522及び向きセンサ524からの信号を解析し、流体輸送機106の位置及び進行方向のそれぞれを特定し得る。次に、フローコントローラ510は、機械ビジョン装置516から受信する信号に基づいて、流体輸送機106からの物体の距離及び方向を特定し得る。代替又は追加として、フローコントローラ510は、除外ゾーン情報列722から物体の位置を検索し得る。流体輸送機106の進行方向及び流体輸送機106からの物体の方向に基づいて、フローコントローラ510は、流体輸送機106の進行方向に対する物体の角度(例えば、0度から360度)を特定し得る。
【0118】
ステップ822において、フローコントローラ510は、流体輸送機106から物体への方向に基づいて、流体を輸送するスプレーヘッド202のうちの1つ又は複数を選択し得る。例えば、物体への噴霧を回避するために、フローコントローラ510は、物体の方向に噴霧しないスプレーヘッド202のみを選択し得る。例えば、流体輸送機106の進行方向(ステップ820において特定される)に対する物体の方向に基づいて、フローコントローラ510は、物体が流体輸送機106の前、右、後ろ、それとも左に配置されているかを判断し得る。一実施形態では、物体が移動方向に対して流体輸送機106の右側に配置されている場合、フローコントローラ510は、スプレーヘッド202a及び/又はスプレーヘッド202cのみを選択し得る。物体が流体輸送機106の左側に配置されている場合、フローコントローラ510は、スプレーヘッド202a及び/又は202bのみを選択し得る。物体が移動方向に対して流体輸送機106の背後に配置されている場合、フローコントローラ510はスプレーヘッド202aのみを選択し得る。
【0119】
ステップ822が完了すると、フローコントローラ510はステップ816に進み、上述したように、フロー制御信号を生成又は変更し得る。しかし、この場合、フローコントローラ510は、フロー制御信号の流体輸送率パラメータRDeliveryを、ステップ806において決定される値に設定し得る。加えて、フローコントローラ510は、ステップ822の結果に基づいて、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3を設定し得る。例えば、スプレーヘッド202aがステップ822において選択される場合、フローコントローラ510は、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3のそれぞれを100%、0%、及び0%に設定し得る。同様に、スプレーヘッド202a及び202bのみがステップ822において選択される場合、フローコントローラ510は、フロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3のそれぞれを50%、50%、及び0%に設定し得る。ステップ808で決定される噴霧の分配又は幅(例えば、幅狭、中間、又は幅広)に基づいて、選択されたスプレーヘッド202のフロー制御信号パラメータDelivery AmountHead1、Delivery AmountHead2、及びDelivery AmountHead3を設定し得る。換言すれば、フローコントローラ510は、ステップ806において決定された流体輸送率RDelivery、ステップ808において決定された噴霧の分配又は幅で、ステップ822において選択されたスプレーヘッド202のみを使用して流体を輸送するように、流体輸送システム304に命令するフロー制御信号を生成し得る。
【0120】
フローコントローラ510は、作業現場情報データベース504及び天気情報データベース505を定期的又はリアルタイムで、受信される情報に基づいて更新することもできる。例えば、可動機102又は作業現場制御施設108は、可動機102の現在位置、積載量、及び傾斜に関する情報を流体輸送機106に定期的に通信し得、フローコントローラ510はこれらの情報を使用して、表面傾斜データ708、交通量情報716、機械積載量情報720、及び除外ゾーン情報722を更新し得る。加えて、作業現場人員は、自分の位置を流体輸送機106又は作業現場制御施設108に送信する通信装置を携帯し得、それらの位置は、除外ゾーン情報722の更新に使用することもできる。加えて、可動機102又は作業現場制御施設108は、交通事故(例えば、事故、摩擦の損失、交通渋滞等)への可動機102の関与に関する情報を通信し得、これらの情報は交通事故情報718の更新に使用し得る。作業現場制御施設から受信する天気リポートを使用して、天気情報データベース505を更新し得る。代替又は追加として、天気情報を検知システム500により収集して、天気情報データベース505を更新し得る。さらに、流体輸送機106のオペレータは、オペレータインタフェース505に情報を入力して、作業現場情報データベース504又は天気情報データベース505を更新し得る。
【0121】
作業現場制御施設108は、監視施設、中央データ施設、派遣制御施設、及び/又は可動機102と通信可能な別の施設を含み得る。フロー制御システム306のいくつかの要素について、流体輸送機106に配置されるものとして上述したが、これらの要素のうちの1つ又は複数を、代替又は追加として、作業現場制御施設108で実施してもよいことを理解されたい。例えば、フローコントローラ510を含むフロー制御システム306のいくつかの要素は、作業現場制御施設108に配置してもよい。検知システム500のセンサ(例えば、流体輸送機106又は作業現場100の他の位置に搭載される)は、それぞれが検知したパラメータの値を示す信号を作業現場制御施設108に通信し得る(例えば、ネットワーク110を介して)。作業現場制御施設108に収容されるフローコントローラ510は、次に、上述した開示される流体輸送決定を実行し、ネットワーク110を介してフロー制御信号を流体輸送機106に送信し得る。流体輸送機106に搭載された流体輸送システム304は、次に、上述したように、フロー制御信号に従って作業現場表面に流体を輸送し得る。
【0122】
ネットワーク110は、可動機102及び作業現場施設108に情報を伝えることが可能な任意のアナログ又はパケット交換ネットワークを含み得る。例えば、ネットワーク110は、インターネット、専用若しくは私設イントラネット、電話回線に基づくネットワーク(例えば、PSTN)、ローカルエリアネットワーク(LAN)、広域ネットワーク(WAN)、デジタル加入者回線(DSL)、及び/又は他の任意の適したネットワーク若しくはネットワーク要素を単独で、又は適した組み合わせで含み得る。ネットワーク110は、伝送制御プロトコル/インターネットプロトコル(TCP/IP)、ハイパーテキスト伝送プロトコル(HTTP)、SOAP、リモートプロシージャコール(RPC)、及び/又は当分野で既知の他の適した通信プロトコルに基づいて通信し得る。
【産業上の利用可能性】
【0123】
開示される実施形態は、変化する環境下又は動作状況下で流体を領域に輸送することが望ましい任意の環境に適用可能であり得る。例えば、上述したように、開示される実施形態は、採掘現場、掘削現場、又は材料貯蔵(例えば、石炭貯蔵)現場等の作業現場に流体を輸送して、作業現場埃状況を制御する可動式流体輸送車両に適用し得る。埃制御用途の他に、開示される流体輸送プロセスを使用して、道路又は他の作業現場表面を順調に維持し得る。例えば、水分を路面に適切な量、提供することは、路面の固定及び交通からの摩耗への耐性に役立ち得る。加えて、開示される流体輸送プロセスを使用して、カッティング、グレーディング、コンパクティング、又は他の建築動作のために作業現場表面を準備し得る。開示される実施形態は、農業用途で灌漑若しくは化学物質を撒くために、又は輸送用途で道路、滑走路、又は駐車場等に食塩水を撒いて、氷を溶かすためにも有用であり得る。加えて、開示される実施形態は、農薬散布、肥料撒き、虫処理、又は水処理用途(例えば、森林火災のリスクを軽減するため)等で飛行機に適用することもできる。
【0124】
さらに、フロー制御システムにより監視される様々な天気パラメータ、作業現場表面パラメータ、及び作業現場動作パラメータに基づいて流体輸送率を決定することにより、流体は、所望の状況(例えば、作業現場の埃)に必要な程度のみまで分配し得る。したがって、労働力、燃料、及び流体供給等の流体輸送資源を節約し得る。流体輸送率は、作業現場での安全状況を保証するために制御し得る。例えば、急な傾斜、交通量の多い領域、運搬領域、及び作業現場の他の問題のある領域には、流体の輸送を少なくして、摩擦を向上させ得る。さらに、流体輸送は、進行中の作業現場動さを妨げないように、車両、作業現場人員、建物、作業領域等を含む作業現場の領域では縮小又は全体的に停止させ得る。
【0125】
さらに、本開示の態様は概して、メモリに記憶されるものとして説明し得るが、当業者は、これらの態様を異なる種類のコンピュータプログラム製品若しくはコンピュータ可読記憶媒体に記憶し、又は異なる種類のコンピュータプログラム製品若しくはコンピュータ可読記憶媒体から読み取ってもよい。例えば、開示される流体輸送プロセスを実施するコンピュータプログラムは、コンピュータ可読記憶媒体に記憶し、且つ/又はコンピュータ可読記憶媒体から読み取り得る。コンピュータ可読記憶媒体は、コンピュータにより実行された場合、コンピュータに、特に、開示される流体輸送プロセスを実行させるコンピュータ実行可能命令を記憶し得る。例示的なコンピュータ可読記憶媒体は、ハードディスク、フロッピーディスク、磁気テープ、若しくは当分野で既知の他の磁気記憶装置等の磁気記憶装置、CD−ROM、DVD−ROM、若しくは当分野で既知の別の光学記憶装置等の光学記憶装置、及び/又はEPROM、フラッシュドライブ、若しくは当分野で既知の別の集積回路記憶装置等の電子記憶装置を含み得る。コンピュータ可読記憶媒体は、1つ若しくは複数の構成要素流体輸送システム304又はフロー制御システム306により又はそのようなシステム内で具現し得る。
【0126】
様々な変更及び変形を本開示の方法及びシステムに対して行うことが可能なことを当業者は理解されよう。方法及びシステムの他の実施形態が、本明細書の考慮並びに本明細書に開示される方法及びシステムの実施から当業者には明らかになろう。例えば、フロー制御システム306は、流体輸送率を決定する際に、上述したパラメータに対する追加、より少数、又は異なるパラメータを考慮に入れ得る。したがって、本明細書及び例が単なる例示として考えられることが意図され、本開示の真の範囲は、以下の特許請求の範囲及びその均等物によって示される。
【特許請求の範囲】
【請求項1】
流体を現場(100)に輸送する可動式流体輸送機(106)であって、
現場での可動式流体輸送機の位置を特定するように構成された位置特定装置(522)と、
現場に関連する情報を記憶する現場データベース(504)と、
フローコントローラ(510)であって、
現場に関連する情報を使用して、現場での可動式流体輸送機の位置に基づいて流体輸送率を決定し、
決定された流体輸送率に基づいてフロー制御信号を生成する
ように構成されたフローコントローラ(510)と、
フロー制御信号に基づいて、決定された流体輸送率で現場の表面に流体を噴霧するように構成された流体輸送システム(304)と、
を備える、可動式流体輸送機。
【請求項2】
現場の表面上の物体を検知するように構成されたビジョン装置(516)をさらに含み、フローコントローラは、
物体の検知に応答して、流体輸送率を変更し、
変更された流体輸送率に基づいてフロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、変更された率で現場の表面に流体を噴霧するようにさらに構成される、請求項1に記載の可動式流体輸送機。
【請求項3】
流体輸送システムは、流体を作業現場の表面に噴霧する複数のスプレーヘッド(202)をさらに含み、フローコントローラは、
可動式流体輸送機の進行方向に対する、検知された物体の方向を特定し、
特定された方向に基づいてスプレーヘッドのうちの少なくとも1つを選択し、
選択された少なくとも1つのスプレーヘッドにさらに基づいて、フロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、選択された少なくとも1つのスプレーヘッドを使用して現場の表面に流体を噴霧するように構成される、請求項2に記載の可動式流体輸送機。
【請求項4】
フローコントローラは、
現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて噴霧幅を決定し、
決定された噴霧幅にさらに基づいてフロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、決定された噴霧幅で現場の表面に流体を噴霧するようにさらに構成される、請求項1に記載の可動式流体輸送機。
【請求項5】
フローコントローラは、
現場に関連する情報に基づいて、可動式流体輸送機の位置に対応する現場パラメータの値を特定し、
現場パラメータの値に基づいて流体輸送率を決定する
ように構成され、
現場パラメータは、現場の表面傾斜、現場の表面を組成する物質の種類、現場の道路の湾曲半径、現場での交通量、現場での交通事故数、又は可動式流体輸送機の位置に関連付けられた現場での車両の積載量のうちの少なくとも1つを含み、
現場に関連する情報は、現場の表面上の位置に従ってインデックス付けられた表面傾斜データ、表面組成データ、道路プロファイル情報、交通事故情報、車両積載量情報、除外ゾーン情報、又は太陽露出情報のうちの少なくとも1つを含む、請求項1に記載の可動式流体輸送機。
【請求項6】
フローコントローラは、
現場に関連する情報を使用して、流体輸送が制限されている現場の領域に可動式流体輸送機が配置されているか否かを判断し、
流体輸送が制限されている現場の領域に可動式流体輸送機が配置されていると判断される場合、流体輸送率を変更し、
変更された流体輸送率に基づいてフロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、変更された流体輸送率で現場の表面に流体を噴霧するようにさらに構成される、請求項12に記載の可動式流体輸送機。
【請求項7】
可動式流体輸送機(106)を使用して現場(100)に流体を輸送する方法であって、
現場での可動式流体輸送機の位置を受信すること、
現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定すること、
決定された流体輸送率に基づいてフロー制御信号を生成すること、及び
フロー制御信号を可動式流体輸送機に送信すること
を含む、方法。
【請求項8】
可動式流体輸送機の近傍で検知された物体を示す情報を受信すること、
物体の検知に応答して流体輸送率を変更すること、
変更された流体輸送率に基づいてフロー制御信号を生成すること
をさらに含む、請求項7に記載の方法。
【請求項9】
可動式流体輸送機の進行方向に対する、検知された物体の方向を特定すること、
特定された方向に基づいて、可動式流体輸送機の複数のスプレーヘッドのうちの少なくとも1つを選択すること、及び
選択された少なくとも1つのスプレーヘッドにさらに基づいて、フロー制御信号を生成すること
をさらに含む、請求項8に記載の方法。
【請求項10】
現場に関連する情報に基づいて噴霧幅を決定すること、及び
決定された噴霧幅にさらに基づいてフロー制御信号を生成すること
をさらに含む、請求項7に記載の方法。
【請求項1】
流体を現場(100)に輸送する可動式流体輸送機(106)であって、
現場での可動式流体輸送機の位置を特定するように構成された位置特定装置(522)と、
現場に関連する情報を記憶する現場データベース(504)と、
フローコントローラ(510)であって、
現場に関連する情報を使用して、現場での可動式流体輸送機の位置に基づいて流体輸送率を決定し、
決定された流体輸送率に基づいてフロー制御信号を生成する
ように構成されたフローコントローラ(510)と、
フロー制御信号に基づいて、決定された流体輸送率で現場の表面に流体を噴霧するように構成された流体輸送システム(304)と、
を備える、可動式流体輸送機。
【請求項2】
現場の表面上の物体を検知するように構成されたビジョン装置(516)をさらに含み、フローコントローラは、
物体の検知に応答して、流体輸送率を変更し、
変更された流体輸送率に基づいてフロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、変更された率で現場の表面に流体を噴霧するようにさらに構成される、請求項1に記載の可動式流体輸送機。
【請求項3】
流体輸送システムは、流体を作業現場の表面に噴霧する複数のスプレーヘッド(202)をさらに含み、フローコントローラは、
可動式流体輸送機の進行方向に対する、検知された物体の方向を特定し、
特定された方向に基づいてスプレーヘッドのうちの少なくとも1つを選択し、
選択された少なくとも1つのスプレーヘッドにさらに基づいて、フロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、選択された少なくとも1つのスプレーヘッドを使用して現場の表面に流体を噴霧するように構成される、請求項2に記載の可動式流体輸送機。
【請求項4】
フローコントローラは、
現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて噴霧幅を決定し、
決定された噴霧幅にさらに基づいてフロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、決定された噴霧幅で現場の表面に流体を噴霧するようにさらに構成される、請求項1に記載の可動式流体輸送機。
【請求項5】
フローコントローラは、
現場に関連する情報に基づいて、可動式流体輸送機の位置に対応する現場パラメータの値を特定し、
現場パラメータの値に基づいて流体輸送率を決定する
ように構成され、
現場パラメータは、現場の表面傾斜、現場の表面を組成する物質の種類、現場の道路の湾曲半径、現場での交通量、現場での交通事故数、又は可動式流体輸送機の位置に関連付けられた現場での車両の積載量のうちの少なくとも1つを含み、
現場に関連する情報は、現場の表面上の位置に従ってインデックス付けられた表面傾斜データ、表面組成データ、道路プロファイル情報、交通事故情報、車両積載量情報、除外ゾーン情報、又は太陽露出情報のうちの少なくとも1つを含む、請求項1に記載の可動式流体輸送機。
【請求項6】
フローコントローラは、
現場に関連する情報を使用して、流体輸送が制限されている現場の領域に可動式流体輸送機が配置されているか否かを判断し、
流体輸送が制限されている現場の領域に可動式流体輸送機が配置されていると判断される場合、流体輸送率を変更し、
変更された流体輸送率に基づいてフロー制御信号を生成する
ようにさらに構成され、
流体輸送システムは、フロー制御信号に基づいて、変更された流体輸送率で現場の表面に流体を噴霧するようにさらに構成される、請求項12に記載の可動式流体輸送機。
【請求項7】
可動式流体輸送機(106)を使用して現場(100)に流体を輸送する方法であって、
現場での可動式流体輸送機の位置を受信すること、
現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定すること、
決定された流体輸送率に基づいてフロー制御信号を生成すること、及び
フロー制御信号を可動式流体輸送機に送信すること
を含む、方法。
【請求項8】
可動式流体輸送機の近傍で検知された物体を示す情報を受信すること、
物体の検知に応答して流体輸送率を変更すること、
変更された流体輸送率に基づいてフロー制御信号を生成すること
をさらに含む、請求項7に記載の方法。
【請求項9】
可動式流体輸送機の進行方向に対する、検知された物体の方向を特定すること、
特定された方向に基づいて、可動式流体輸送機の複数のスプレーヘッドのうちの少なくとも1つを選択すること、及び
選択された少なくとも1つのスプレーヘッドにさらに基づいて、フロー制御信号を生成すること
をさらに含む、請求項8に記載の方法。
【請求項10】
現場に関連する情報に基づいて噴霧幅を決定すること、及び
決定された噴霧幅にさらに基づいてフロー制御信号を生成すること
をさらに含む、請求項7に記載の方法。
【図1】

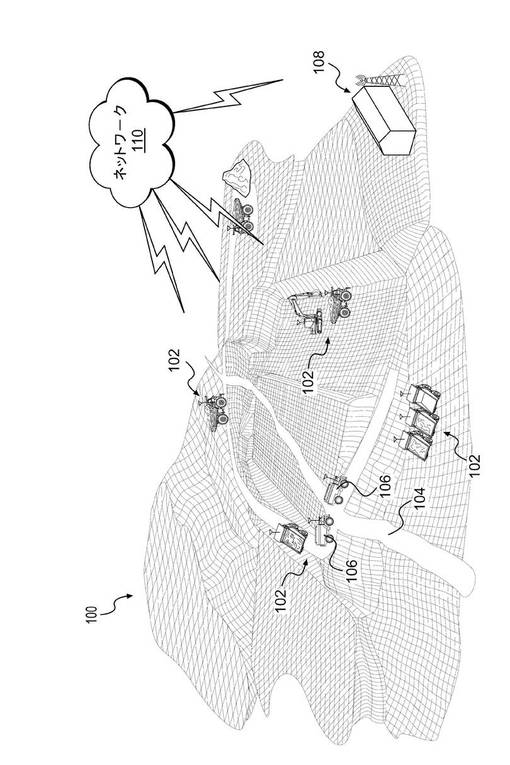
【図2】
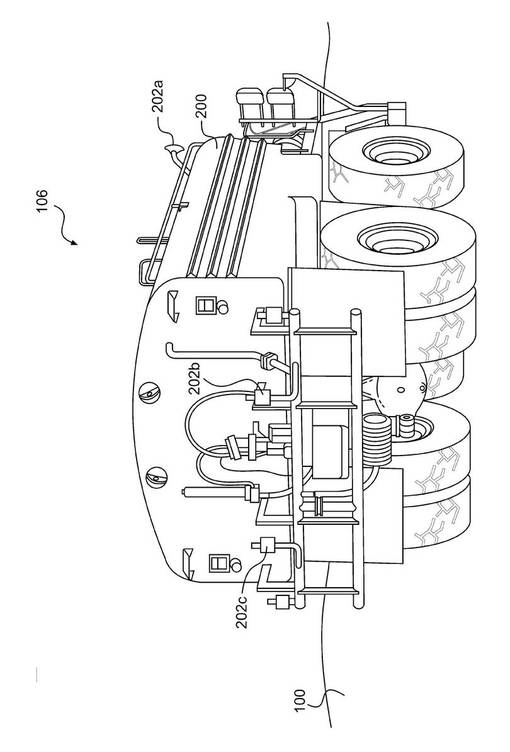
【図3】
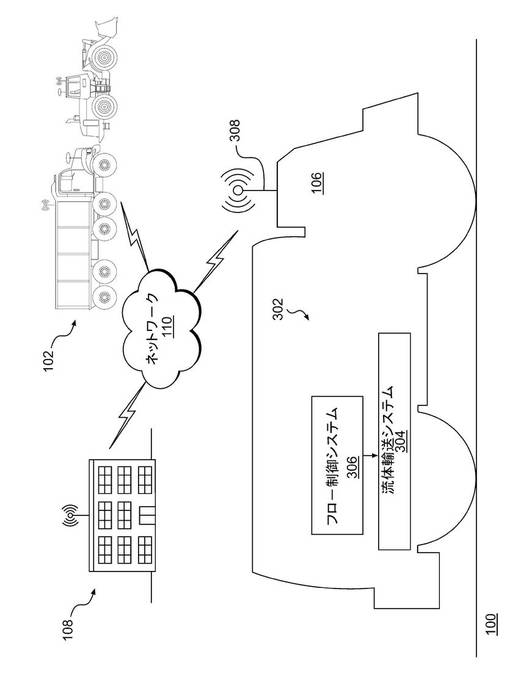
【図4】
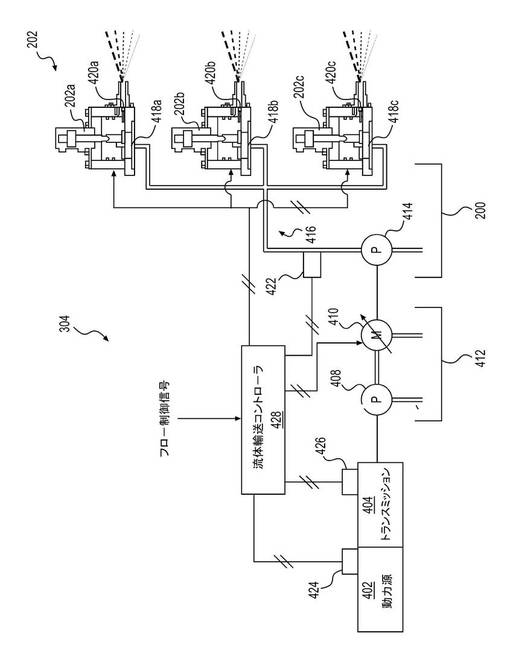
【図5】
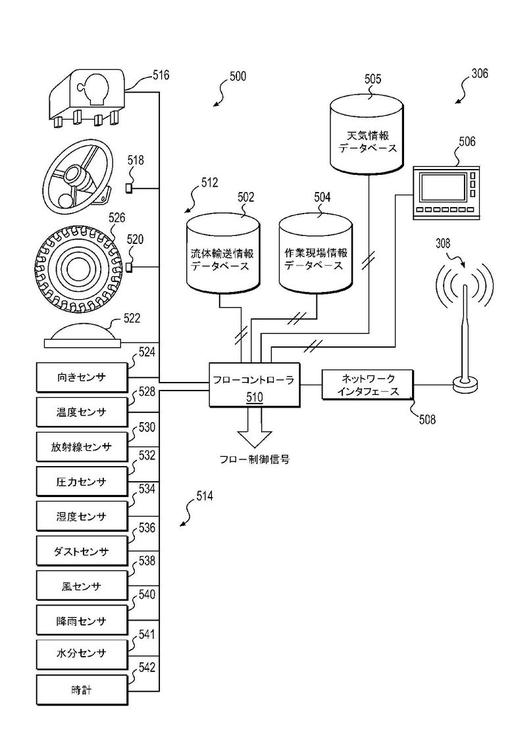
【図6】
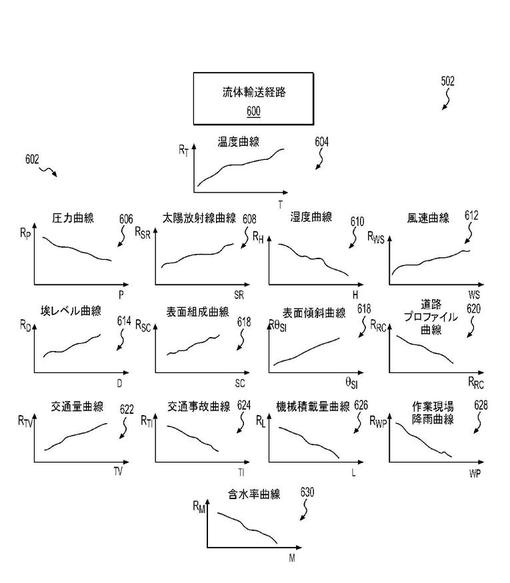
【図7】
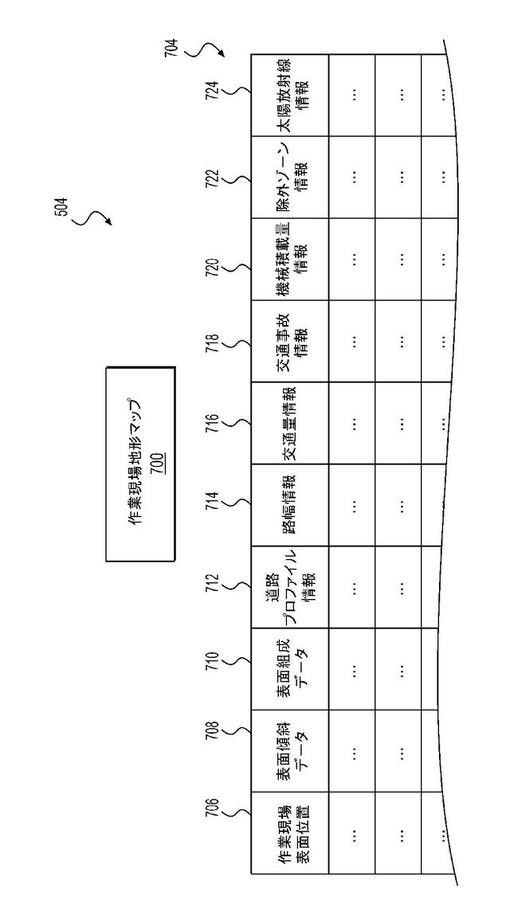
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2013−516558(P2013−516558A)
【公表日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−547070(P2012−547070)
【出願日】平成22年10月6日(2010.10.6)
【国際出願番号】PCT/US2010/051605
【国際公開番号】WO2011/090522
【国際公開日】平成23年7月28日(2011.7.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ETHERNET
2.フロッピー
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【Fターム(参考)】
【公表日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成22年10月6日(2010.10.6)
【国際出願番号】PCT/US2010/051605
【国際公開番号】WO2011/090522
【国際公開日】平成23年7月28日(2011.7.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ETHERNET
2.フロッピー
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【Fターム(参考)】
[ Back to top ]