
流体駆動回転体の負荷特性計測方法およびその装置
【課題】 風車・水車などの回転体の負荷特性の計測において、低速の不安定領域であっても安定して負荷特性の計測ができる計測方法およびその装置を提供する。
【解決手段】 駆動・電力回生が可能な交流モータ(3)にトルク検出器(2)を介して供試回転体(1)を接続し、周波数を可変制御するモータ制御装置(4)によってそのモータ(3)を所望の回転数に制御して前記トルク検出器(2)により制動トルクを計測し、そしてモータ(3)が電力回生状態にあるときには前記モータ制御装置(4)を介し回生電力を発電電力吸収手段(5)により吸収して回転制御する。
【解決手段】 駆動・電力回生が可能な交流モータ(3)にトルク検出器(2)を介して供試回転体(1)を接続し、周波数を可変制御するモータ制御装置(4)によってそのモータ(3)を所望の回転数に制御して前記トルク検出器(2)により制動トルクを計測し、そしてモータ(3)が電力回生状態にあるときには前記モータ制御装置(4)を介し回生電力を発電電力吸収手段(5)により吸収して回転制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、流体で駆動される回転体(例えば、風力発電用の風車あるいは潮流発電用の水車など)を、例えば風洞あるいは水路などの流路内に支持し、回転数−トルク特性の様な負荷特性や、その他の特性を計測する負荷特性計測技術に関する。
【背景技術】
【0002】
従来、風力発電用風車や潮流発電用水車などの負荷特性計測試験を実施するのに際して、負荷特性の計測が困難な領域があった。以下、風車での計測を例に説明する。
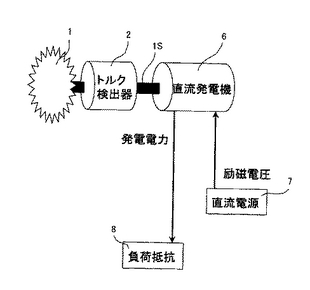
従来の計測方法では、図7に示すように、供試回転体(風車)1を流路(例えば風洞:図示せず)中に設置する。風車1の出力軸1Sにはトルク検出器2が介装されており、直流発電機6に接続されている。なお、この例において発電機は直流他励発電機を用いている。
その直流発電機6は、直流電源7から励磁電圧を付加される。直流発電機6の発電電力は負荷抵抗8により吸収される。なお、負荷としての直流発電機6を、渦電流ブレーキや摩擦ブレーキに代えることもできる。
【0003】
図7において、図示しない風洞内に所定の流速で風を発生させ、直流電源7から直流発電機6へ印加した励磁電圧および負荷抵抗を調整することにより、直流発電機6及び風車1を所望の回転数に制御すれば、トルク検出器2により風車1のトルク(回転体1を制動するのに必要な制動トルクと等しい)を計測することで、風洞内の流速における風車1の「回転数−負荷」特性の、当該所望の回転数におけるプロットが特定される。
【0004】
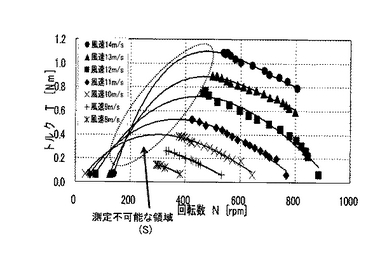
ここで、図7を参照して説明した計測装置により、風洞において風車の負荷特性の計測を行った場合には、図8に示す回転数−トルク特性図(横軸:風車回転数N[rpm]、縦軸:制動トルクT[Nm]、で風速をパラメータにしての計測例)において、符号Sで示す領域、すなわちトルクが極値となる回転数の近傍以下の領域(トルクピークの回転数以下の領域)では、回転数−トルク特性図の計測プロットを得ることが出来ないことが知られている。
【0005】
トルクピークの回転数以上の回転数の領域では、直流モータ6の回転数すなわち風車1の回転数を所望の一定値に維持することは可能である。
しかし、直流モータ6の回転数すなわち風車1の回転数を図8において符号Sで示す領域、すなわちトルクピークの回転数以下の領域における回転数に設定した場合には、回転数及びトルクが急激に減少して、直ちに風車1の回転が停止して、回転数ゼロの状態になってしまうことが従来から良く知られている。
【0006】
そして、風車1の回転数が急激に低下するため、図8において符号Sで示す領域では風車1の回転を安定させることができず、したがって、この領域の特性は理論的には推定することができても、実際に計測し確認することは、従来、不可能であった。
【0007】
ここで、直流モータや交流モータにより強制的に風車の回転数を一定にすることも考えられる。しかし、直流モータでは、直流電源の電圧によって定まる単一の回転数しか計測プロットを得ることが出来ない。また、交流モータでは、電源周波数によって定まる単一の回転数しか計測プロットを得ることが出来ない。減速機等で回転数を変化させたとしても、特性曲線を特定するのに十分なプロットは得ることは困難である。
【0008】
また、インバータ付きの交流モータを用いてモータの回転数を任意に変動させることも考えられるが、回転体の回転トルクが正の値を取る領域では回生電流が発生し、インバータ装置を破壊するため計測することが出来ない。そして、直流モータを使用した場合も、回生電流が発生すると直流電源装置を破壊するため計測することが出来ない。
【0009】
その他の従来技術としては、例えば、風車の回転数に基いて発電出力の安定化制御のための操作量を決定し、或いは、フライホイール装置の回転速度に基いて算出されたトルクを発電出力の安定化制御における操作量とする技術が存在する(例えば、特許文献1参照)。
しかし、この技術は風車における発電出力の変動を抑制することを目的としており、上述した様な、実際に計測し確認することが不可能な領域における測定を可能にせしめるものではない。
【特許文献1】特開2003−21047号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は上述した従来技術の問題点に鑑みて提案されたものであり、風車や水車などの流体駆動回転体の特性を計測するに当たって、回転体を回転駆動するモータ制御装置を破壊してしまうこと無く、従来は計測不可能である回転数領域における特性(例えば、負荷特性)を、安定して確実に計測ができる様な、流体駆動回転体の負荷特性計測方法および装置の提供を目的としている。
【課題を解決するための手段】
【0011】
発明者等は、上述した問題に関して種々研究の結果、誘導機あるいは同期機の交流モータを周波数制御することにより、上述した計測不能領域においても、流体駆動回転体の回転数を所望の回転数に保持できることを見出し、制動トルクの計測方法を提案するに至った。
【0012】
本発明の流体駆動回転体の負荷特性計測方法は、駆動・電力回生が可能であり且つトルク検出器(2)を介して流体駆動回転体(1)に接続されたモータ(交流モータ3、直流モータ3D)の回転数を、周波数を可変制御するモータ制御装置(4)によって所望回転数に制御する工程(S2)と、所望の回転数に制御された際にトルク検出器(2)によりトルクを計測する工程(S3)とを有し、モータ(交流モータ3、直流モータ3D)が電力回生状態にある場合には前記モータ制御装置(4)を介して回生電力を発電電力吸収手段(5)により吸収せしめる(以って回転制御する)ことを特徴としている(請求項1)。
【0013】
また、本発明の流体駆動回転体(1)の負荷特性計測装置は、流体駆動回転体(1)と、該流体駆動回転体(1)の回転軸(1S)に介装されたトルク検出器(2)と、該トルク検出器(2)を介して流体駆動回転体(1)の回転軸(1S)に接続されたモータ(交流モータ3、直流モータ3D)と、周波数可変制御によってモータ(交流モータ3)、もしくは電圧可変制御によってモータ(直流モータ3D)を所望回転数に制御し且つモータ(交流モータ3、直流モータ3D)が駆動及び電力回生可能となる様に構成されたモータ制御装置(4)と、該モータ制御装置(4)に接続され且つモータ(交流モータ3、直流モータ3D)が電力回生状態にある場合に回生電力を吸収する様に構成されている発電電力吸収手段(5)、とを有していることを特徴としている(請求項3)。
【0014】
本発明の実施に際して、前記所望回転数は、例えば、回転数−トルク特性におけるトルクピークの回転数以下の回転数である(請求項2、請求項4)。
【0015】
本発明において、モータとしては、交流モータ(3)が好ましい。そして、該交流モータ(3)は、駆動・電力回生が可能な誘導機もしくは同期機が好ましい。
そして、モータとして交流モータ(3)を用いる場合には、モータ制御装置(4)は、モータを駆動する周波数を制御するインバータであることが好ましい。
【0016】
一方、本発明において、モータとして直流モータ(3D)を使用することも可能である。
その場合、モータ制御装置(40)は、電力回生が可能な回路構成を有する直流電源を備えている。
【発明の効果】
【0017】
上述した様な構成を具備する本発明によれば、風車・水車などの流体で駆動される流体駆動回転体(1:供試回転体)の特性、例えば、回転数−トルク特性を計測するに際して、例えば交流モータ(3:誘導機もしくは同期機:直流モータ3Dでも可)を用いており、モータ制御装置(例えばインバータ)を介してそのモータ(3:直流モータ3Dでも可)を駆動し且つ回生された電力を供給/吸収可能な構成とすることで、前記不安定領域(S)においても流体駆動回転体(1)を任意の回転数に保持することが可能になる。
【0018】
すなわち、本発明により流体駆動回転体(1)の特性、例えば、回転数−トルク特性を計測するに当たっては、先ず、特性を計測するべき流体駆動回転体(1)を風洞あるいは水路等の流路内に支持し、流路内における流速を一定値に保持する。そして、モータ(3、3D)の回転数を所望の回転数に保持した状態で、トルク検出器(2)により流体駆動回転体(1:供試回転体)の回転トルクを計測すれば、前記流速における所望の回転数に対する回転トルクの計測プロットを得ることが出来る。
以下、回転数を順次変化せしめれば、前記流速における回転数−トルク特性の特性曲線が求められる。風洞あるいは水路等の流路内における流速を別の数値に変化させても、同様に処理すれば良い。
【0019】
ここで、モータ制御装置(例えばインバータ)を介してそのモータ(3:直流モータ3Dでも可)を駆動して流体駆動回転体(1)を任意の回転数に保持することが出来る本発明では、上述した(トルクピーク回転数以下の回転数領域である)低回転数の不安定領域(S)においても、回転トルク等の負荷特性が計測できるので、起動性や低回転数域の性能の把握が可能となり、その結果、特性を計測した流体駆動回転体(1)における起動性及び低速性能を改善することが出来る。
【0020】
さらに本発明によれば、負荷特性の計測およびその運転制御を容易に自動化することができる。
【0021】
これに加えて本発明によれば、モータ(誘導機もしくは同期機としての交流モータ3、直流モータ3D)で発生した電力を回生電力として利用、あるいは売電することができる、というメリットも享受できる。
【0022】
そして本発明によれば、回生電力が生じても、その電力によりモータ制御装置が破壊してしまうことは防止される。
【発明を実施するための最良の形態】
【0023】
以下、図面を参照して、本発明の実施形態について説明する。
なお、図示の実施形態において、流体駆動回転体(供試回転体)として風車を用いており、所望の流速に設定可能な流路としては風洞を設けている。換言すれば、図示の実施形態では、風洞内に設置された風車が流体駆動回転体となる。
【0024】
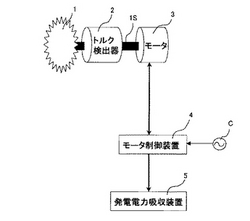
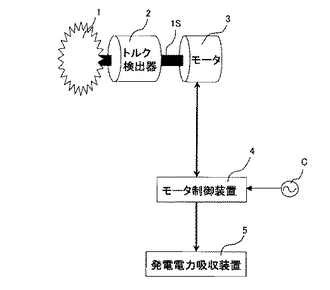
図1において、風車1は、所定の流速に設定可能な風洞(図示なし)内に流れに向かって配設されており、トルク検出器2を介して交流モータ3に連結されている。そして、その交流モータ3は、誘導機または同期機のいずれかで構成されており、風車1を回転駆動し且つ風車1の回転トルクを吸収して電力回生が可能な様に構成されている。
【0025】
交流モータ3は、実験者(作業者)の指示によって駆動用電力の周波数を変化して、所望の回転数に制御するモータ制御装置(インバータ)4に連結され、そのモータ制御装置4は、商用電源Cに接続されていると共に、発電電力を電力系統に回生する(売電)、あるいは抵抗によって消費する発電電力吸収装置5に接続されている。
【0026】
このような構成において、風車1は、図示しない風洞内に設置され、当該風洞内の風速が所望の数値に設定される。そして、商用電源Cからモータ制御装置(インバータ)4を経由して、周波数が制御された交流電流が交流モータ3に供給されると、交流モータ3は所定の回転数で回転する。
交流モータ3を駆動すれば、交流モータ3の出力軸1Sの回転数が風車1の回転数となるので、風車1は所望の回転数(交流モータ3の回転数)に制御される。
【0027】
ここで、風洞内には設定された風速の風が流れているため、当該風により風車を回す力が発生する。その力は、交流モータ3で吸収されて、電力消費或いは電力回生となる。
例えば、図5において負の数値の回転トルクとなる場合には、負の回転トルクは風車を制動する様に作用するので、当該制動作用の分だけ交流モータ3は余計に電力を消費することになる。
【0028】
一方、図5において正の数値の回転トルクとなる場合には、当該トルクは風車を回転させる様に作動するので、当該回転トルクにより交流モータ3では電力回生が為される。回生された電力は、モータ制御装置4を経由して、発電電力吸収装置5で吸収される。具体的には、発電電力吸収装置5内の電気抵抗により消費されるか、或いは、電力系統(例えば、商用電力系統)へ回生される。
【0029】
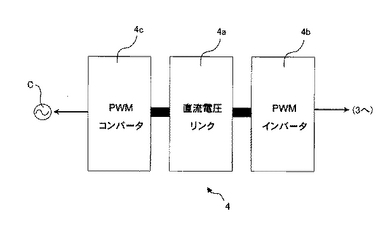
交流モータ3を制御する制御装置4は、図2に示す実施例では、直流電圧リンク4aとPWMインバータ4b、4cとを有している。そして、直流電圧リンク4aからPWMインバータ4bを介して交流モータ3側に接続され、一方、直流電圧リンク4aからPWMコンバータ4cを介して商用電源に接続されて、電力系統への電力回生が行われている。
【0030】
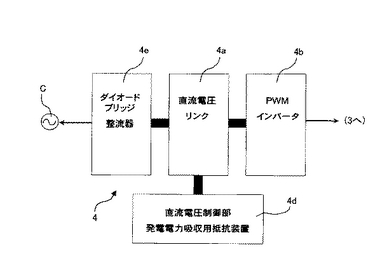
また、図3に示す実施例では、制御装置4は、直流電圧リンク4a、PWMインバータ4b、直流電圧制御部および発電電力吸収用抵抗装置4d、ダイオードブリッジ整流器4eとを有している。
図3の制御装置4では、直流電圧リンク4aからPWMインバータ4bを介して交流機3へ接続されており、駆動電流の周波数制御を行っている。一方、直流電圧リンク4aと直流電圧制御部および発電電力吸収用抵抗装置4dとが接続されて電力の吸収が行われる。
【0031】
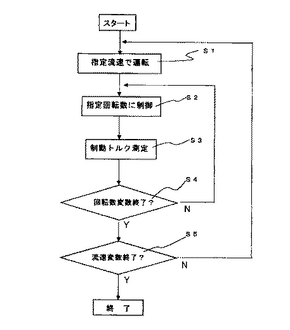
次に、図4を参照して、図1で示す実施形態による回転数−トルク特性を計測する手順を説明する。
計測に当たって、図示しない風洞中に風車1を設置する。そして、図4で示すように、風洞における風速を一定の数値に保持して運転する(ステップS1)。
次にモータ制御装置4によって交流モータ3が所望回転数で回転するように制御し(ステップS2)、風車1の出力軸1Sに介装されたトルク検出器2で制動トルクを計測する(ステップS3)。
【0032】
ここで、図5や図8で示す様な回転数−トルク特性曲線を得るためには、複数の回転数の各々について、対応する回転トルクを計測して、複数のプロットを得る必要がある。そのため、ステップS4では、回転数−トルク特性曲線を得るために必要なプロットを得たか否か、換言すれば、回転数−トルク特性曲線を得るために必要な回転数の数値の全てについて、回転トルクの計測が完了したか否かをチェックする。
必要な回転数の数値の全てについて、計測が終了していないのであれば(ステップS4がNO)、次に計測する回転数を指定してステップS2に戻る。
一方、必要な回転数の数値の全てについて、計測が終了していれば(ステップS4がYES)、ステップS5に行く。
【0033】
図5或いは図8で示す様に、風車1の回転数−トルク特性曲線は、単一の風速についてのみ行われるのではなく、複数種類の風速下において計測される。ステップS5においては、回転数−トルク特性曲線を決定するべき全ての風速について計測を完了したか否かがチェックされる。
対象となる全ての風速について回転数−トルク特性曲線を得ていなければ(ステップS5がNO)、次に計測する流速を指定してステップS1に戻る。一方、全ての風速について回転数−トルク特性曲線を得ているのであれば(ステップS5がYES)、この測定試験は終了する。
【0034】
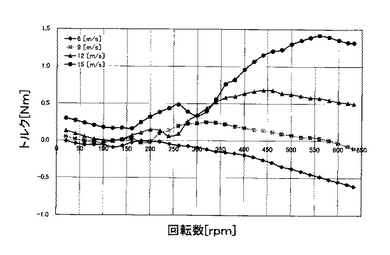
図5は、本発明によって特に低速域の負荷特性を計測した試験結果の一例である。ここに、横軸に回転数をとり、縦軸は風車1自体の回転トルクであり、風速をパラメータにして測定値がプロットされている。
前出の図8と対比すれば明らかな様に、制動トルクが極値となる回転数の近傍以下の領域(不安定領域Sに相当する領域)においても連続して安定した計測値が得られている。
【0035】
図5から明らかなように、不安定領域Sに相当する領域では、風車1の回転トルクが「負」の値をとる、すなわち風車1自体が、その回転に制動を掛けてしまう様な領域が存在する。従って、風車の起動時や低速回転時には、回転トルクが「負」の値をとる部分を避けるような工夫をすれば、不安定領域Sであっても、風車1をある程度安定して運転させることが可能である旨が理解される。
一方、図5において、風車1の回転トルクが「正」の値を取る領域では、モータ側では電力が回生されるのである。
【0036】
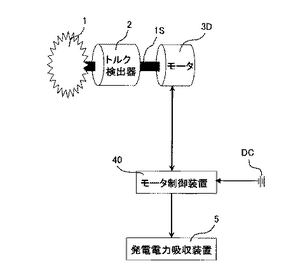
図1〜図5で説明した第1実施形態では、モータとしては交流モータ3を用いているが、図6の第2実施形態では、直流モータ3Dを用いている。
また、直流モータ3Dを制御するモータ制御装置40は直流電源DCと接続されており、直流電圧を制御して直流モータ3Dの回転数を任意に調整可能である様に構成されており、且つ、電力回生が可能な様に構成されている。ここで、直流電力を回生できる回路構成については、公知、既存のものをそのまま転用可能であり、説明は省略する。
【0037】
図6で示す実施形態においても、風洞(図示せず)内の風速により風車1が負の回転トルクを有する場合には、当該トルクは制動力として作用するので、その分だけ直流電源DCから新たな電力消費となり、正の回転トルクを有する場合は電力回生が為され、回生された電力は発電電力吸収装置5において、抵抗により電力消費が為され、或いは商用電力系統への電力回生が可能となる。
図6の実施形態のその他の構成や作用効果は、図1〜図5の実施形態と同様である。
【0038】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
例えば、図示の実施形態では風車を例に説明したが、他の流体駆動回転体でも同様であり、例えば水車であれば、風洞に代えて流水路中に設置して、図示の実施形態と同様に適用することが出来る。
また、電力回生のための回路構成も、図示のものには限定されない。
【図面の簡単な説明】
【0039】
【図1】本発明による負荷特性計測装置の実施形態を説明する模式図。
【図2】制御手段の一実施例を示すブロック図。
【図3】制御手段の他の実施例を示すブロック図。
【図4】本発明による負荷特性計測の手順を示すフロー図。
【図5】本発明の負荷特性計測方法による風車の負荷特性の計測結果の一例を示す線図。
【図6】本発明の第2実施形態を示すブロック図。
【図7】従来の負荷特性計測装置を説明する模式図。
【図8】風車の負荷特性(回転数−トルク特性)の計測結果の一例を示す線図。
【符号の説明】
【0040】
1・・・風車
2・・・トルク検出器
3・・・交流モータ
3D・・・直流モータ
4、40・・・モータ制御装置
5・・・発電電力吸収装置
6・・・直流発電機
【技術分野】
【0001】
本発明は、流体で駆動される回転体(例えば、風力発電用の風車あるいは潮流発電用の水車など)を、例えば風洞あるいは水路などの流路内に支持し、回転数−トルク特性の様な負荷特性や、その他の特性を計測する負荷特性計測技術に関する。
【背景技術】
【0002】
従来、風力発電用風車や潮流発電用水車などの負荷特性計測試験を実施するのに際して、負荷特性の計測が困難な領域があった。以下、風車での計測を例に説明する。
従来の計測方法では、図7に示すように、供試回転体(風車)1を流路(例えば風洞:図示せず)中に設置する。風車1の出力軸1Sにはトルク検出器2が介装されており、直流発電機6に接続されている。なお、この例において発電機は直流他励発電機を用いている。
その直流発電機6は、直流電源7から励磁電圧を付加される。直流発電機6の発電電力は負荷抵抗8により吸収される。なお、負荷としての直流発電機6を、渦電流ブレーキや摩擦ブレーキに代えることもできる。
【0003】
図7において、図示しない風洞内に所定の流速で風を発生させ、直流電源7から直流発電機6へ印加した励磁電圧および負荷抵抗を調整することにより、直流発電機6及び風車1を所望の回転数に制御すれば、トルク検出器2により風車1のトルク(回転体1を制動するのに必要な制動トルクと等しい)を計測することで、風洞内の流速における風車1の「回転数−負荷」特性の、当該所望の回転数におけるプロットが特定される。
【0004】
ここで、図7を参照して説明した計測装置により、風洞において風車の負荷特性の計測を行った場合には、図8に示す回転数−トルク特性図(横軸:風車回転数N[rpm]、縦軸:制動トルクT[Nm]、で風速をパラメータにしての計測例)において、符号Sで示す領域、すなわちトルクが極値となる回転数の近傍以下の領域(トルクピークの回転数以下の領域)では、回転数−トルク特性図の計測プロットを得ることが出来ないことが知られている。
【0005】
トルクピークの回転数以上の回転数の領域では、直流モータ6の回転数すなわち風車1の回転数を所望の一定値に維持することは可能である。
しかし、直流モータ6の回転数すなわち風車1の回転数を図8において符号Sで示す領域、すなわちトルクピークの回転数以下の領域における回転数に設定した場合には、回転数及びトルクが急激に減少して、直ちに風車1の回転が停止して、回転数ゼロの状態になってしまうことが従来から良く知られている。
【0006】
そして、風車1の回転数が急激に低下するため、図8において符号Sで示す領域では風車1の回転を安定させることができず、したがって、この領域の特性は理論的には推定することができても、実際に計測し確認することは、従来、不可能であった。
【0007】
ここで、直流モータや交流モータにより強制的に風車の回転数を一定にすることも考えられる。しかし、直流モータでは、直流電源の電圧によって定まる単一の回転数しか計測プロットを得ることが出来ない。また、交流モータでは、電源周波数によって定まる単一の回転数しか計測プロットを得ることが出来ない。減速機等で回転数を変化させたとしても、特性曲線を特定するのに十分なプロットは得ることは困難である。
【0008】
また、インバータ付きの交流モータを用いてモータの回転数を任意に変動させることも考えられるが、回転体の回転トルクが正の値を取る領域では回生電流が発生し、インバータ装置を破壊するため計測することが出来ない。そして、直流モータを使用した場合も、回生電流が発生すると直流電源装置を破壊するため計測することが出来ない。
【0009】
その他の従来技術としては、例えば、風車の回転数に基いて発電出力の安定化制御のための操作量を決定し、或いは、フライホイール装置の回転速度に基いて算出されたトルクを発電出力の安定化制御における操作量とする技術が存在する(例えば、特許文献1参照)。
しかし、この技術は風車における発電出力の変動を抑制することを目的としており、上述した様な、実際に計測し確認することが不可能な領域における測定を可能にせしめるものではない。
【特許文献1】特開2003−21047号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は上述した従来技術の問題点に鑑みて提案されたものであり、風車や水車などの流体駆動回転体の特性を計測するに当たって、回転体を回転駆動するモータ制御装置を破壊してしまうこと無く、従来は計測不可能である回転数領域における特性(例えば、負荷特性)を、安定して確実に計測ができる様な、流体駆動回転体の負荷特性計測方法および装置の提供を目的としている。
【課題を解決するための手段】
【0011】
発明者等は、上述した問題に関して種々研究の結果、誘導機あるいは同期機の交流モータを周波数制御することにより、上述した計測不能領域においても、流体駆動回転体の回転数を所望の回転数に保持できることを見出し、制動トルクの計測方法を提案するに至った。
【0012】
本発明の流体駆動回転体の負荷特性計測方法は、駆動・電力回生が可能であり且つトルク検出器(2)を介して流体駆動回転体(1)に接続されたモータ(交流モータ3、直流モータ3D)の回転数を、周波数を可変制御するモータ制御装置(4)によって所望回転数に制御する工程(S2)と、所望の回転数に制御された際にトルク検出器(2)によりトルクを計測する工程(S3)とを有し、モータ(交流モータ3、直流モータ3D)が電力回生状態にある場合には前記モータ制御装置(4)を介して回生電力を発電電力吸収手段(5)により吸収せしめる(以って回転制御する)ことを特徴としている(請求項1)。
【0013】
また、本発明の流体駆動回転体(1)の負荷特性計測装置は、流体駆動回転体(1)と、該流体駆動回転体(1)の回転軸(1S)に介装されたトルク検出器(2)と、該トルク検出器(2)を介して流体駆動回転体(1)の回転軸(1S)に接続されたモータ(交流モータ3、直流モータ3D)と、周波数可変制御によってモータ(交流モータ3)、もしくは電圧可変制御によってモータ(直流モータ3D)を所望回転数に制御し且つモータ(交流モータ3、直流モータ3D)が駆動及び電力回生可能となる様に構成されたモータ制御装置(4)と、該モータ制御装置(4)に接続され且つモータ(交流モータ3、直流モータ3D)が電力回生状態にある場合に回生電力を吸収する様に構成されている発電電力吸収手段(5)、とを有していることを特徴としている(請求項3)。
【0014】
本発明の実施に際して、前記所望回転数は、例えば、回転数−トルク特性におけるトルクピークの回転数以下の回転数である(請求項2、請求項4)。
【0015】
本発明において、モータとしては、交流モータ(3)が好ましい。そして、該交流モータ(3)は、駆動・電力回生が可能な誘導機もしくは同期機が好ましい。
そして、モータとして交流モータ(3)を用いる場合には、モータ制御装置(4)は、モータを駆動する周波数を制御するインバータであることが好ましい。
【0016】
一方、本発明において、モータとして直流モータ(3D)を使用することも可能である。
その場合、モータ制御装置(40)は、電力回生が可能な回路構成を有する直流電源を備えている。
【発明の効果】
【0017】
上述した様な構成を具備する本発明によれば、風車・水車などの流体で駆動される流体駆動回転体(1:供試回転体)の特性、例えば、回転数−トルク特性を計測するに際して、例えば交流モータ(3:誘導機もしくは同期機:直流モータ3Dでも可)を用いており、モータ制御装置(例えばインバータ)を介してそのモータ(3:直流モータ3Dでも可)を駆動し且つ回生された電力を供給/吸収可能な構成とすることで、前記不安定領域(S)においても流体駆動回転体(1)を任意の回転数に保持することが可能になる。
【0018】
すなわち、本発明により流体駆動回転体(1)の特性、例えば、回転数−トルク特性を計測するに当たっては、先ず、特性を計測するべき流体駆動回転体(1)を風洞あるいは水路等の流路内に支持し、流路内における流速を一定値に保持する。そして、モータ(3、3D)の回転数を所望の回転数に保持した状態で、トルク検出器(2)により流体駆動回転体(1:供試回転体)の回転トルクを計測すれば、前記流速における所望の回転数に対する回転トルクの計測プロットを得ることが出来る。
以下、回転数を順次変化せしめれば、前記流速における回転数−トルク特性の特性曲線が求められる。風洞あるいは水路等の流路内における流速を別の数値に変化させても、同様に処理すれば良い。
【0019】
ここで、モータ制御装置(例えばインバータ)を介してそのモータ(3:直流モータ3Dでも可)を駆動して流体駆動回転体(1)を任意の回転数に保持することが出来る本発明では、上述した(トルクピーク回転数以下の回転数領域である)低回転数の不安定領域(S)においても、回転トルク等の負荷特性が計測できるので、起動性や低回転数域の性能の把握が可能となり、その結果、特性を計測した流体駆動回転体(1)における起動性及び低速性能を改善することが出来る。
【0020】
さらに本発明によれば、負荷特性の計測およびその運転制御を容易に自動化することができる。
【0021】
これに加えて本発明によれば、モータ(誘導機もしくは同期機としての交流モータ3、直流モータ3D)で発生した電力を回生電力として利用、あるいは売電することができる、というメリットも享受できる。
【0022】
そして本発明によれば、回生電力が生じても、その電力によりモータ制御装置が破壊してしまうことは防止される。
【発明を実施するための最良の形態】
【0023】
以下、図面を参照して、本発明の実施形態について説明する。
なお、図示の実施形態において、流体駆動回転体(供試回転体)として風車を用いており、所望の流速に設定可能な流路としては風洞を設けている。換言すれば、図示の実施形態では、風洞内に設置された風車が流体駆動回転体となる。
【0024】
図1において、風車1は、所定の流速に設定可能な風洞(図示なし)内に流れに向かって配設されており、トルク検出器2を介して交流モータ3に連結されている。そして、その交流モータ3は、誘導機または同期機のいずれかで構成されており、風車1を回転駆動し且つ風車1の回転トルクを吸収して電力回生が可能な様に構成されている。
【0025】
交流モータ3は、実験者(作業者)の指示によって駆動用電力の周波数を変化して、所望の回転数に制御するモータ制御装置(インバータ)4に連結され、そのモータ制御装置4は、商用電源Cに接続されていると共に、発電電力を電力系統に回生する(売電)、あるいは抵抗によって消費する発電電力吸収装置5に接続されている。
【0026】
このような構成において、風車1は、図示しない風洞内に設置され、当該風洞内の風速が所望の数値に設定される。そして、商用電源Cからモータ制御装置(インバータ)4を経由して、周波数が制御された交流電流が交流モータ3に供給されると、交流モータ3は所定の回転数で回転する。
交流モータ3を駆動すれば、交流モータ3の出力軸1Sの回転数が風車1の回転数となるので、風車1は所望の回転数(交流モータ3の回転数)に制御される。
【0027】
ここで、風洞内には設定された風速の風が流れているため、当該風により風車を回す力が発生する。その力は、交流モータ3で吸収されて、電力消費或いは電力回生となる。
例えば、図5において負の数値の回転トルクとなる場合には、負の回転トルクは風車を制動する様に作用するので、当該制動作用の分だけ交流モータ3は余計に電力を消費することになる。
【0028】
一方、図5において正の数値の回転トルクとなる場合には、当該トルクは風車を回転させる様に作動するので、当該回転トルクにより交流モータ3では電力回生が為される。回生された電力は、モータ制御装置4を経由して、発電電力吸収装置5で吸収される。具体的には、発電電力吸収装置5内の電気抵抗により消費されるか、或いは、電力系統(例えば、商用電力系統)へ回生される。
【0029】
交流モータ3を制御する制御装置4は、図2に示す実施例では、直流電圧リンク4aとPWMインバータ4b、4cとを有している。そして、直流電圧リンク4aからPWMインバータ4bを介して交流モータ3側に接続され、一方、直流電圧リンク4aからPWMコンバータ4cを介して商用電源に接続されて、電力系統への電力回生が行われている。
【0030】
また、図3に示す実施例では、制御装置4は、直流電圧リンク4a、PWMインバータ4b、直流電圧制御部および発電電力吸収用抵抗装置4d、ダイオードブリッジ整流器4eとを有している。
図3の制御装置4では、直流電圧リンク4aからPWMインバータ4bを介して交流機3へ接続されており、駆動電流の周波数制御を行っている。一方、直流電圧リンク4aと直流電圧制御部および発電電力吸収用抵抗装置4dとが接続されて電力の吸収が行われる。
【0031】
次に、図4を参照して、図1で示す実施形態による回転数−トルク特性を計測する手順を説明する。
計測に当たって、図示しない風洞中に風車1を設置する。そして、図4で示すように、風洞における風速を一定の数値に保持して運転する(ステップS1)。
次にモータ制御装置4によって交流モータ3が所望回転数で回転するように制御し(ステップS2)、風車1の出力軸1Sに介装されたトルク検出器2で制動トルクを計測する(ステップS3)。
【0032】
ここで、図5や図8で示す様な回転数−トルク特性曲線を得るためには、複数の回転数の各々について、対応する回転トルクを計測して、複数のプロットを得る必要がある。そのため、ステップS4では、回転数−トルク特性曲線を得るために必要なプロットを得たか否か、換言すれば、回転数−トルク特性曲線を得るために必要な回転数の数値の全てについて、回転トルクの計測が完了したか否かをチェックする。
必要な回転数の数値の全てについて、計測が終了していないのであれば(ステップS4がNO)、次に計測する回転数を指定してステップS2に戻る。
一方、必要な回転数の数値の全てについて、計測が終了していれば(ステップS4がYES)、ステップS5に行く。
【0033】
図5或いは図8で示す様に、風車1の回転数−トルク特性曲線は、単一の風速についてのみ行われるのではなく、複数種類の風速下において計測される。ステップS5においては、回転数−トルク特性曲線を決定するべき全ての風速について計測を完了したか否かがチェックされる。
対象となる全ての風速について回転数−トルク特性曲線を得ていなければ(ステップS5がNO)、次に計測する流速を指定してステップS1に戻る。一方、全ての風速について回転数−トルク特性曲線を得ているのであれば(ステップS5がYES)、この測定試験は終了する。
【0034】
図5は、本発明によって特に低速域の負荷特性を計測した試験結果の一例である。ここに、横軸に回転数をとり、縦軸は風車1自体の回転トルクであり、風速をパラメータにして測定値がプロットされている。
前出の図8と対比すれば明らかな様に、制動トルクが極値となる回転数の近傍以下の領域(不安定領域Sに相当する領域)においても連続して安定した計測値が得られている。
【0035】
図5から明らかなように、不安定領域Sに相当する領域では、風車1の回転トルクが「負」の値をとる、すなわち風車1自体が、その回転に制動を掛けてしまう様な領域が存在する。従って、風車の起動時や低速回転時には、回転トルクが「負」の値をとる部分を避けるような工夫をすれば、不安定領域Sであっても、風車1をある程度安定して運転させることが可能である旨が理解される。
一方、図5において、風車1の回転トルクが「正」の値を取る領域では、モータ側では電力が回生されるのである。
【0036】
図1〜図5で説明した第1実施形態では、モータとしては交流モータ3を用いているが、図6の第2実施形態では、直流モータ3Dを用いている。
また、直流モータ3Dを制御するモータ制御装置40は直流電源DCと接続されており、直流電圧を制御して直流モータ3Dの回転数を任意に調整可能である様に構成されており、且つ、電力回生が可能な様に構成されている。ここで、直流電力を回生できる回路構成については、公知、既存のものをそのまま転用可能であり、説明は省略する。
【0037】
図6で示す実施形態においても、風洞(図示せず)内の風速により風車1が負の回転トルクを有する場合には、当該トルクは制動力として作用するので、その分だけ直流電源DCから新たな電力消費となり、正の回転トルクを有する場合は電力回生が為され、回生された電力は発電電力吸収装置5において、抵抗により電力消費が為され、或いは商用電力系統への電力回生が可能となる。
図6の実施形態のその他の構成や作用効果は、図1〜図5の実施形態と同様である。
【0038】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
例えば、図示の実施形態では風車を例に説明したが、他の流体駆動回転体でも同様であり、例えば水車であれば、風洞に代えて流水路中に設置して、図示の実施形態と同様に適用することが出来る。
また、電力回生のための回路構成も、図示のものには限定されない。
【図面の簡単な説明】
【0039】
【図1】本発明による負荷特性計測装置の実施形態を説明する模式図。
【図2】制御手段の一実施例を示すブロック図。
【図3】制御手段の他の実施例を示すブロック図。
【図4】本発明による負荷特性計測の手順を示すフロー図。
【図5】本発明の負荷特性計測方法による風車の負荷特性の計測結果の一例を示す線図。
【図6】本発明の第2実施形態を示すブロック図。
【図7】従来の負荷特性計測装置を説明する模式図。
【図8】風車の負荷特性(回転数−トルク特性)の計測結果の一例を示す線図。
【符号の説明】
【0040】
1・・・風車
2・・・トルク検出器
3・・・交流モータ
3D・・・直流モータ
4、40・・・モータ制御装置
5・・・発電電力吸収装置
6・・・直流発電機
【特許請求の範囲】
【請求項1】
駆動・電力回生が可能であり且つトルク検出器を介して流体駆動回転体に接続されたモータの回転数を、周波数を可変制御するモータ制御装置によって所望回転数に制御する工程と、所望の回転数に制御された際に前記トルク検出器によりトルクを計測する工程とを有し、モータが電力回生状態にある場合には前記モータ制御装置を介して回生電力を発電電力吸収手段により吸収せしめることを特徴とする流体駆動回転体の負荷特性計測方法。
【請求項2】
前記所望回転数は、回転数−トルク特性におけるトルクピークの回転数以下の回転数である請求項1の流体駆動回転体の負荷特性計測方法。
【請求項3】
流体駆動回転体と、該流体駆動回転体の回転軸に介装されたトルク検出器と、該トルク検出器を介して流体駆動回転体の回転軸に接続されたモータと、周波数可変制御によってモータを所望回転数に制御し且つモータが駆動及び電力回生可能となる様に構成されたモータ制御装置と、該モータ制御装置に接続され且つモータが電力回生状態にある場合に回生電力を吸収する様に構成されている発電電力吸収手段、とを有していることを特徴とする流体駆動回転体の負荷特性計測装置。
【請求項4】
前記所望回転数は、回転数−トルク特性におけるトルクピークの回転数以下の回転数である請求項3の流体駆動回転体の負荷特性計測装置。
【請求項1】
駆動・電力回生が可能であり且つトルク検出器を介して流体駆動回転体に接続されたモータの回転数を、周波数を可変制御するモータ制御装置によって所望回転数に制御する工程と、所望の回転数に制御された際に前記トルク検出器によりトルクを計測する工程とを有し、モータが電力回生状態にある場合には前記モータ制御装置を介して回生電力を発電電力吸収手段により吸収せしめることを特徴とする流体駆動回転体の負荷特性計測方法。
【請求項2】
前記所望回転数は、回転数−トルク特性におけるトルクピークの回転数以下の回転数である請求項1の流体駆動回転体の負荷特性計測方法。
【請求項3】
流体駆動回転体と、該流体駆動回転体の回転軸に介装されたトルク検出器と、該トルク検出器を介して流体駆動回転体の回転軸に接続されたモータと、周波数可変制御によってモータを所望回転数に制御し且つモータが駆動及び電力回生可能となる様に構成されたモータ制御装置と、該モータ制御装置に接続され且つモータが電力回生状態にある場合に回生電力を吸収する様に構成されている発電電力吸収手段、とを有していることを特徴とする流体駆動回転体の負荷特性計測装置。
【請求項4】
前記所望回転数は、回転数−トルク特性におけるトルクピークの回転数以下の回転数である請求項3の流体駆動回転体の負荷特性計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−30043(P2006−30043A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−211034(P2004−211034)
【出願日】平成16年7月20日(2004.7.20)
【出願人】(899000057)学校法人日本大学 (650)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月20日(2004.7.20)
【出願人】(899000057)学校法人日本大学 (650)
【Fターム(参考)】
[ Back to top ]