
流量がモニタリングされる粒子センサ
エアロゾル粒子カウンタの流量をモニタリングするためのデバイスおよび方法が提供される。粒子センサは、粒子カウンタと、粒子センサ動作中に流れ測定オリフィスの両端の差圧(DP)を測定するための差圧センサを備える流れ測定オフリフィスと、臨界流オリフィスと、を有する。真空源が、粒子カウンタ、流れ測定オリフィスおよび臨界流オリフィスの各々を通して周囲ガスを吸引する。大気圧センサが大気圧(AP)を測定し、基準圧力センサが粒子センサの圧力(BP)を測定する。センサからの出力は、差圧センサ、大気圧センサおよび基準圧力センサの各々に操作可能に接続されるモニタなどによって、流動状態を特定するために使用される。このようにして、高価なセンサや他の流量制御コンポーネントを必要とせずに、目標流量からの流量の逸脱が容易にモニタリングされる。
【発明の詳細な説明】
【関連出願の相互参照】
【0001】
[0001]本願は、2009年8月24日に出願された米国仮特許出願第61/236318号明細書の利益を主張し、同出願は、本開示と矛盾しない範囲で本明細書に参照により援用されたものとする。
【背景技術】
【0002】
[0002]多くの分野において、エアロゾル光学粒子センサが重要である。例えば、マイクロ汚染関連の産業は、汚染の定量評価を与えるためにエアロゾル光学粒子センサを使用することに依存している。エアロゾル光学粒子センサは、クリーンルームやクリーンゾーンにおける空中浮遊粒子の汚染を測定する使用目的で採用されている。一般に、これらの粒子センサは低コストであり、センサに通す必要のある空気流を発生させるための内部ポンプに依存しない。その代わりとして、粒子センサは、流れを発生させるためにハウス真空(house vacuum)システムへの接続に依存する。流量は、一般に、粒子センサに配置された低コストの臨界流オリフィスに真空システムを接続することによって制御される。粒子センサによって検出される粒子の濃度を正確に定量化するために、センサに投入されるガスの流量は既知のものでなければならない。例えば、検出されない流量が15%低減すると、粒子汚染濃度レベルの判定値が実際より15%低くなる。したがって、センサによってサンプリングされているガスの流量が測定されるか、またはユーザ指定のレベルから流量が外れたことをユーザに表示するために警告が正確に発せられることが重要である。
【0003】
[0003]体積流量を制御するための臨界流オリフィスは、流量の維持を確保するためのよく知られている技法である。臨界流オリフィスは、当技術分野において十分に確立されている(例えば、Willeke/Baron著、「Aerosol Measurement」、およびHinds著、「Aerosol Technology」を参照されたい)。臨界流オリフィスは、非常に優れた低コスト体積流制御デバイスであるが、このようなオリフィスは、低コストかつ正確に体積流量をモニタリングする能力を備えていない。既製の流量センサも利用可能であるが、粒子センサ当たり数百ドルのコストがかかる。1999年7月16日に出願された「Air Pump for Particle Sensing Using Regenerative Fan, and Associated Methods」という発明の名称の米国特許第6167107号明細書に記載されているように、粒子センサに内部フローモニタリングを追加することもできる。しかしながら、このような内部フローモニタリングは、総コストが100ドルを超える流量センシングデバイスが必要になる。このようなコストがかかることにより、低コストのエアロゾル光学粒子センサにこのようなデバイスを使用することは実用的ではない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
[0004]以上のことから、粒子センサにコストや複雑性を著しく増加させることなく、粒子センサにおける流量を高精度かつ信頼性をもってモニタ可能なインテリジェントフローモニタリングシステムが必要とされている。したがって、本発明の1つの目的は、粒子センサにおける流量をモニタリングし、流量が目標流量から外れたときを特定して適切な救済策をとることができるようにするためのデバイスおよび方法を提供することである。
【課題を解決するための手段】
【0005】
[0005]本明細書において、サンプリングガスの流量を信頼性をもってモニタ可能な高精度体積流モニタリングデバイスを有する低コスト粒子センサが提供される。特に、本明細書において提供されるデバイスおよび方法は、検出されないままになりうるセンサ内での逆流事象を特定するのに有用である。本明細書において提示されるシステムにより、高価な流量センサまたは圧力センサ、および/または制御下にある流量を発生させるためのブロワを必要とせずに粒子センサにフローモニタリングが提供される。その代わり、真空源を介して流れが確実に発生され、本明細書に記載するように流量がモニタリングされうる。
【0006】
[0006]1つの差圧センサおよび2つの絶対圧センサを、これらのセンサの出力に基づいたアルゴリズムとともに使用すると、正確性および低コストを兼ね備えた低コストのインテリジェントフローモニタリング手段を作り出すことが容易にできる。このシステムにより、流動状態誤差、および、任意に、流動状態誤差がフロー入力障害(「上流圧力損失」)に関連するか、または真空損失(「下流真空損失」)に関連するかを正確に評価し特定する能力が得られる。対照的に、従来の粒子センサは、流量のモニタリングはできても、流量状態誤差の理由は区別しない。
【0007】
[0007]一実施形態において、粒子センサを提供することによって粒子センサにおけるガスの体積流量をモニタリングする方法が提供される。粒子センサは、流れ測定オリフィスの両端の差圧を測定するための差圧センサを備える流れ測定オリフィスと、臨界オリフィスと、流れ測定オリフィスおよび臨界オリフィスにわたってガス流を発生させるための真空システムとを有する。臨界オリフィスの下流位置で真空圧力を確立することによって、粒子センサを通してガス流が発生する。センサは任意のガスに浮遊する粒子を検出しうるが、一実施形態において、ガスは、製造施設やクリーンルーム内の空気のような空気である。圧力降下(DP)は、差圧センサなどによって流れ測定オリフィスの両端で求められる。大気圧(AP)および臨界オリフィスの上流位置にある粒子センサ内の圧力(BP)が求められる。DP、APおよびBP値は、流動状態を特定することによって、粒子カウンタの流量をモニタリングするために使用される。
【0008】
[0008]一態様において、流動状態は、許容範囲の流量および流量誤差状態からなる群から選択される。別の態様において、流動状態は流量誤差状態である。
【0009】
[0009]一態様において、本明細書に提供される方法のいずれかは、真空誘導された流量損失または入口誘導された流量損失として流量誤差状態を特定することにさらに関する。
【0010】
[0010]一実施形態において、本発明により、流量誤差状態を特定するためのアルゴリズムが提供される。例えば、真空誘導された流量損失は、
DPIcorr<(1−TOLERANCE)2*DPItarget、または
DPIcorr>(1+TOLERANCE)2*DPItarget
により特定され、
式中、
DPIcorrは、粒子センサ動作中に流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEは、ユーザ選択の流量許容レベルであり、
DPItargetは、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrは、システム較正中の差圧センサ値であり、
BPIcorrは、粒子センサ動作中の基準(bench)圧力値であり、
BPCcorrは、システム較正中の基準圧力値である。
【0011】
[0011]別の実施形態において、この方法は、入口誘導された流量損失を特定するためのものであり、誤差は、
APRinsitu<(1−TOLERANCE)*APRcalibration、または、
APRinsitu>(1+TOLERANCE)*APRcalibration
により特定され、式中、
APRinsituは、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrは、粒子センサ動作中の大気圧値であり、
BPIcorrは、粒子センサ動作中の基準圧力値であり、
TOLERANCEは、ユーザ選択の流量許容レベルであり、
APRcalibrationは、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで
BPCcorrは、較正時の基準圧力値であり、
APCcorrは、較正時の大気圧である。
【0012】
[0012]一実施形態において、TOLERANCE値は、5%以上、かつ15%以下の範囲から選択され、例えば、10%の値である。TOLERANCE値の下限値は、センサの正確性に左右される。特に、差圧センサが10%未満の圧力降下の変化を確実に検出できない場合、TOLERANCE値の下限が事実上10%になる。対照的に、10%の圧力降下の変化を検出可能な差圧センサが、10%以上の任意のTOLERANCE値に対して信頼性をもって使用されてもよい。
【0013】
[0013]一態様において、BPIは、粒子センサの光学ブロック内で測定される。一態様において、流れ測定オリフィスは、臨界オリフィスの上流に配置される。一態様において、真空源はハウス真空である。一態様において、ガスは空気である。
【0014】
[0014]本明細書に記載する方法のいずれかが、モニタリングした流量が目標流量から10%以上外れた流動状態を特定するために使用されてもよい。一態様において、目標流量は、1CFM(毎分立方フィート)の目標流量のようなガスの体積流量である。
【0015】
[0015]別の実施形態において、この方法のいずれかが、前記流動状態の逸脱の原因を特定するステップをさらに備え、この原因は真空誘導された損失または入口誘導された流量損失である。
【0016】
[0016]また、本明細書において、ガス中の粒子を検出し計数するための粒子センサなどのデバイスが提供される。一態様において、本発明は、粒子カウンタと、粒子センサ動作中に流れ測定オリフィスの両端にかかる差圧(DPI)を測定するための差圧センサを備える流れ測定オフリフィスと、臨界流オリフィスと、粒子カウンタ、流れ測定オリフィスおよび臨界流オリフィスの各々を通して周囲ガスを吸引するための真空源と、大気圧(API)を測定するための大気圧センサと、粒子センサの圧力(BPI)を測定するための基準圧力センサと、差圧センサ、大気圧センサおよび基準圧力センサの各々に操作可能に接続され、DPI、APIおよびBPIの値から流動状態を特定するモニタと、を備える粒子センサである。
【0017】
[0017]「モニタ」とは、1つまたは複数の流動状態を特定する検出可能な信号を与える当技術分野において既知の任意のコンポーネントまたはコンポーネントのまとまりをさす。例えば、モニタは、流動状態が流量誤差であるときを示すための信号を発生させるアラームでありうる。あるいは、モニタは、ユーザがセンサにおける流動状態を決定するために検討しうる数値を単に与えるものであってもよい。
【0018】
[0018]一態様において、粒子センサは、粒子センサを通るガスの目標流量からの逸脱が10%以上である流量誤差を示す。
【0019】
[0019]別の態様において、粒子センサは、
DPIcorr<(1−TOLERANCE)2*DPItarget、
DPIcorr>(1+TOLERANCE)2*DPItarget、
APRinsitu<(1−TOLERANCE)*APRcalibration、および
APRinsitu>(1+TOLERANCE)*APRcalibration
によって規定される1つまたは複数の条件を満たす流量誤差を示し、
式中、
DPIcorrは、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEは、ユーザ選択の流量許容レベルであり、
DPItargetは、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで
DPCcorrは、システム較正中の差圧センサ値であり、
BPIcorrは、粒子センサ動作中の基準圧力値であり、
BPCcorrは、システム較正中の基準圧力値であり、
APRinsituは、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで
APIcorrは、粒子センサ動作中の大気圧値であり、
BPIcorrは、粒子センサ動作中の基準圧力値であり、
APRcalibrationは、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで
APCcorrは、較正時の大気圧である。
【0020】
[0020]別の態様において、粒子センサは、許容範囲の流動状態である流動状態を特定し、この場合の許容範囲の流動状態とは、目標流量からの逸脱が10%以下である流量である。許容範囲の流動状態の特定は、粒子センサによる進行中のサンプリングに対応するものであってもよい。
【0021】
[0021]一実施形態において、流れ測定オリフィスは、粒子カウンタと臨界流オリフィスとの間に配置される。別の実施形態において、基準圧力センサは、粒子カウンタの光学ブロック内の圧力を測定する。
【0022】
[0022]別の態様において、本発明は、各センサが低コストであることから、低コストを維持したままセンサが組み込まれた粒子センサを確保するセンサに関する。低コストは、機能性または性能ベースのパラメータから、あるいは絶対的コストの面からなどのあらゆる方法で規定されうる。例えば、低コストのセンサは、圧力変化を検出するためのセンサの感度、再現性または精度を反映したものであってもよい。例えば、ある低コストセンサの最大精度は2.5%(フルスケールスパン)であるのに対して、高コストセンサは、一般に、感度、再現性および精度が高い。あるいは、低コストとは、本明細書において記載される場合、粒子センサにおいて使用されるセンサのコストに関して表されることもある。
【0023】
[0023]いかなる特定の理論に拘束されることを望むことなく、本発明の実施形態に関連する原理または機構に関する見解または理解についての考察が、本明細書において記述される。任意の説明または仮説の最終的な妥当性にかかわらず、本発明の実施形態は、なお機能し有用でありうることを認識されたい。
【図面の簡単な説明】
【0024】
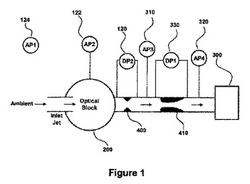
【図1】関連する圧力センサおよび圧力センサの場所をまとめた、粒子センサの略図である。
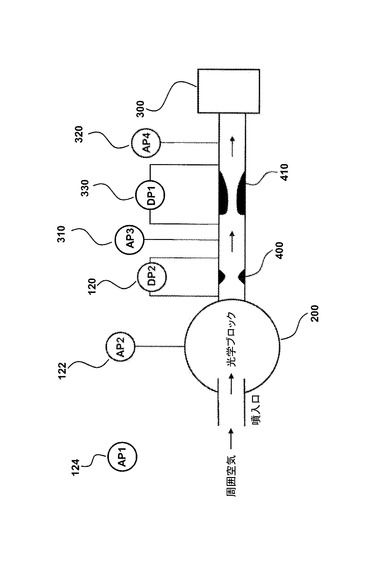
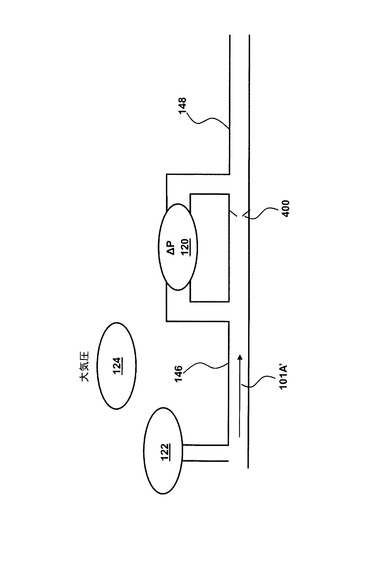
【図2】粒子センサにおける流動状態をモニタリングするために測定または算出される関連するパラメータを示す、粒子センサの略図である。
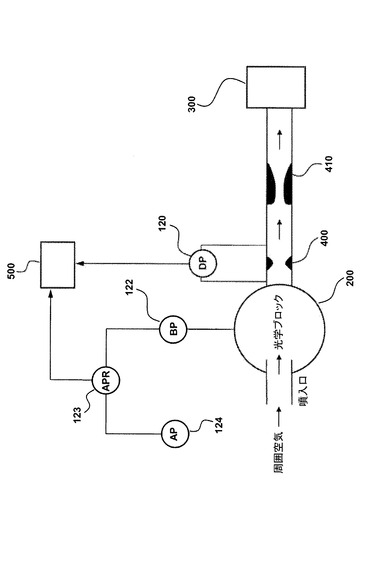
【図3】粒子センサおよび空気流の追加の詳細図を示す。
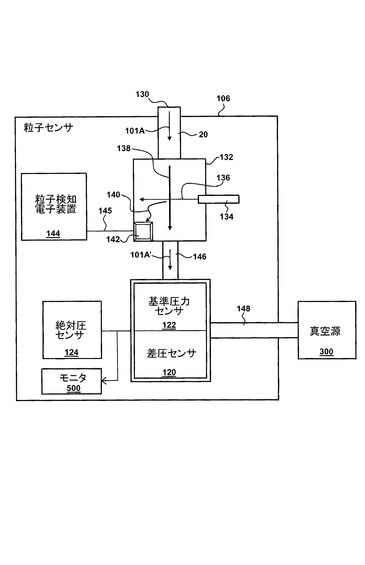
【図4】ベルヌーイ方程式に基づいて流量を算出するために、オリフィスの両端の圧力降下が使用される流れ測定オリフィスを示す。
【発明を実施するための形態】
【0025】
[0028]以下の特許、すなわち、米国特許第5,467,189号明細書、同第5,515,164号明細書、同第5,600,438号明細書、同第4,571,079号明細書、同第4,984,889号明細書、同4,594,715号明細書、同第5,825,487号明細書および同第6,167,107号明細書により、粒子センサおよび空気流システムに関する有用な背景が提供される。上述した各特許は、本開示と矛盾しない範囲で参照により本明細書に組み込まれる。
【0026】
[0029]「流動状態」とは、粒子センサを通して引き込まれて流れるガスのフロー状態をさす。一態様において、流動状態は、モニタリングされる流量と目標流量との比較に基づくものである。目標流量は、粒子センサが使用に校正された流量をさし、一般に、臨界流オリフィスの特性に依存する。一態様において、臨界流オリフィスは、所望の値で固定される目標流量を与えるようなサイズにされる。本明細書において提供されるデバイスおよび方法は、任意の所望の目標流量に適合可能であるが、一実施形態において、目標流量は、1CFMである。(目標流量に対する)許容レベルは、モニタリングされた流量が選択された許容レベル内である限り、粒子センサが通常に動作を続けるように選択される。これを「許容範囲の流動状態」と呼ぶ。しかしながら、フローモニタリングにより、流量が許容レベルの範囲外であることが明らかになる場合、粒子センサは、「流量誤差状態」を示すことができる。加えて、「流量警告状態」は、許容レベルに近づいているが、まだ許容レベルを超えていないモニタリングされた流量に対応するものであってもよい。
【0027】
[0030]本明細書において提供されるデバイスおよび方法は、流量誤差状態の原因を識別可能である。「真空誘導された流量損失」は、粒子センサの下流端での事象をさし、真空源の動作不良、あるいは粒子センサ、および/または真空源接続の漏れなどによって真空損失を引き起こす真空源を伴う。対照的に、「入口誘導された流量損失」は、臨界流オリフィスから上流の場所で圧力降下を生じ増大させる、入口オリフィスまたは入口チューブに向けてもしくはおいてなどの、粒子センサの上流端に特定される障害または他の事象をさす。
【0028】
[0031]「TOLERANCE」は、ユーザ選択またはメーカ選択された値であり、目標流量に対する割合で表されうる。例えば、TOLERANCEが10%になるように選択される場合、デバイスおよび関連する方法は、モニタリングされた流量が目標流量から10%以上外れる場合(例えば、目標流量の110%を超えるか、または目標流量の90%以下)、流動状態誤差を特定する。TOLERANCEは、割合として、または対応する数値として表されてもよい。
【0029】
[0032]一態様において、このシステムのセンサの全コスト(現在の水準)は、少なくとも1000個を一括購入する場合、25ドル未満である。これにより、インテリジェントフローモニタリングを有する結果的に得られる粒子センサも低コストであることが確保される。差圧センサは、所望の圧力差を検出するのに十分な精度の任意の圧力センサである。例えば、10%変化(例えば、TOLERANCE=10%)を高信頼性かつ高精度に検出することが望ましい状況において、適切な差圧センサは、Freescale(登録商法)Semiconductor MPXV5004DP差圧センサであり、適切な絶対圧センサは、Freescale(登録商標)Semiconductor MP3H6155Aを含む。
【0030】
[0033]「操作可能に接続される」とは、モニタおよびセンサなどの要素の構成をさし、一方の要素の作用または反作用が他方の要素に影響を与えるが、各要素の機能を保持したままである。例えば、センサの作用(例えば、圧力変換器からの電圧出力に対応)は、流動状態、特に、流量誤差を特定するために処理される1つまたは複数の変数を決定するために使用されてもよく、それにより、モニタは、流動状態誤差をユーザに警告するための信号を発生させる。この例において、モニタは、センサに操作可能に接続されていると言える。
【0031】
[0034]本発明は、以下の非限定的な例によってさらに理解されうる。本明細書において引用されたすべての参考文献は、本開示と矛盾しない範囲で参照により援用されたものとする。本明細書の記載は多くの詳細を含むが、これらは、本発明の範囲を限定するものとして解釈されるべきではなく、本発明の現時点で好ましい実施形態のいくつかの例示を与えるものにすぎない。例えば、本発明の範囲は、提示した例によってというよりも、添付した特許請求の範囲およびそれらの均等物によって決定されるべきものである。
【0032】
[0035]例1:流量制御用の臨界流オリフィス
[0036]必要とされる要求臨界圧力降下は、以下の式によって与えられる。
【0033】
Pv/Pa=[2/(k+1)]K/(K−1) (1)
Pv=臨界流オリフィスの真空側の圧力
Pa=臨界流オリフィスの上流側の圧力
k=2原子気体=1.4の場合、ガス比熱比=7/5
【0034】
[0037]kに1.4を代入して式を簡潔にする。
Pv/Pa=0.53 (2)
【0035】
[0038]標準状態で、Pa=14.7psiである。したがって、標準状態での要求臨界圧力降下は、7.791psi(15.9水銀柱インチ)である。
【0036】
[0039]標準状態で、臨界流オリフィスは、下流真空レベルが15.9水銀柱インチより大きい場合、一定の体積流量を維持する。これらの条件下において、オリフィスのスロートにおける速度は音速であり、下流真空レベルがさらに増加すると、スロートを通る速度は増加しない。ほとんどの先行技術の粒子センサは、ナイフエッジの臨界流オリフィスを利用している。このオリフィスを利用するには、ユーザは、粒子センサの固有の流量で最小の15.9水銀柱インチ真空レベルを維持可能な真空ポンプシステムを設ける必要がある。
【0037】
[0040]臨界オリフィス粒子センサの流量に誤差を生じうる状態には、2つの固有の状態がある。1つの不良状態は、真空レベルが、臨界流を維持するのに必要な真空レベルを下回る場合である。これは、例えば、ハウス真空システムが能力を失うか、またはハウスシステムと粒子センサへの真空接続との間に障害がある場合に起こりうる。もう1つの不良状態は、粒子センサに対して入口圧力降下の変化がある場合である。これは、例えば、粒子センサの入口にある障害物によって生じうる。
【0038】
[0041]例2:低コストフローモニタリング
[0042]図1は、流量をインテリジェントにモニタリングするために使用されてもよい粒子センサの流体設計上の特徴を詳細に示す。粒子センサは、周囲環境から粒子センサの光学ブロック200内に周囲空気が引き込まれる噴入口を含む。光学ブロックは、移動している空気に浮遊した粒子が、光学ブロックを出る前にレーザビームを通して引き込まれ、光エネルギーを散乱するときに、粒子検出を実行するシステムの部分である。
【0039】
[0043]空気は、流れ測定オリフィス400を通して流される。このオリフィスの両端にある差圧120は、粒子センサを通る流量を測定するために使用される。この差圧は、圧力降下が臨界流オリフィスの要求された圧力降下に直接追加されるときに最小限に抑えられる。次いで、空気は、外部真空システム300によってセンサから吸引される前に、ベンチュリ臨界流オリフィス410を通して流される。臨界流オリフィスは、粒子センサの目標流量を制御するために使用される。外部真空源300は、空気を粒子センサ内に引き込むのに必要な力を供給する。
【0040】
[0044]図1に、いくつかの重要な空気圧ポイントが詳細に示されている。AP1 124は、周囲環境の絶対気圧である。AP2 122は、粒子センサ、この例では、光学ブロック200の粒子センサの絶対気圧である(本明細書において、「基準圧力」BPと呼ぶ)。センサ122は、システムの圧力が確実に測定されるのであれば、粒子センサシステムに沿った場所であればどこに配置されてもよい。一態様において、BPは、臨界オリフィス410の上流の位置で測定される。別の態様において、BPは、流れ測定オリフィス400の上流の位置で測定される。DP2 120は、流れ測定オリフィス400の両端の差圧であり、センサを通る流量を示すものとして使用される。AP3 310は、臨界流オリフィス入口の絶対気圧である。AP4 320は、適用された真空システムの絶対気圧である。DP1 330は、臨界流オリフィスの両端の差圧である。
【0041】
[0045]このシステムは、最小限の要求真空レベルを供給し維持する真空源300の能力に依存しながら、臨界流オリフィスの断面積によって決定される一定の体積流量を維持する。このオリフィスは、周囲環境(AP1)から引き込まれる空気の所望の目標体積流量を達成するように、較正時にサイズ調整されうる。したがって、AP1をモニタリングする能力とともに、AP2をモニタリングする他の圧力ポイントにより、AP1の変動(高度や天候の変化などによる)が、目標体積流量を確実に維持するために考慮されることが確保される。このシステム内への体積流量は、外部真空源300によって生成される真空レベルAP4 320が、臨界流を生成するために臨界流オリフィス410の両端に要求される差圧(330)を生成するのに十分な強さに保たれる限り一定のままであり、上流の圧力降下の変化はない(例えば、124および122:AP1〜AP2、または124および310:AP1〜AP3)。
【0042】
[0046]流量が一定のままである限り、流れ測定オリフィス400の両端の差圧120(例えば、DP2)は一定のままである。これにより、DP2がシステムの流量状態をモニタリングするための優れた選択肢になるが、これはDP2が任意に変化すると、その変化に応じて流量が変化している可能性が示されるためである。
【0043】
[0047]粒子センサが一の観察場所で較正され、次に別の場所に移されれば、周囲空気圧力(124)の著しい変化にさらされうる。絶対気圧は、海面(407水柱インチ)から5000フィートの高度のさらに低いレベル(338水柱インチ)などの海面からの標高に応じて変動する。周囲空気圧(AP)がこのように17%変化することで、粒子センサ内に引き込まれる体積流量は著しく変化しない。臨界流オリフィスの圧力降下は気流音速によって制限され、気流音速は、例えば、海面から5000フィートまでの範囲の標高でほとんど変化しない。
【0044】
[0048]標高が変化すると、流れ測定オリフィスの両端の差圧(DP2)は著しく変化する。通常の粒子センサの動作中に生じる流動状態下において、差圧の変化と体積流量との関係は、ベルヌーイ方程式を用いて表されうる。
【0045】
[0049]Q=K・[(2・ΔP)/ρ]1/2 (3)
Q=体積流量
K=経験的に導かれる定数
ρ=密度
【0046】
[0050]この場合、ΔPの変化は、絶対気圧の変化(および方程式(4)で以下に示す理想気体の法則に反映されているような空気密度ρの対応する変化)による。周囲空気圧が17%低下すると、流れ測定オリフィスの両端の差圧(DP2)が17%低下する。(DP2)が、粒子センサのフロー状態の指示を生成するために使用される場合、周囲空気圧の変化を補償可能なものでなければならない。これは、低コスト(例えば、およそ8ドル)の絶対気圧センサを使用して達成されうる。このタイプのセンサは、1.5%の再現性を有し、目標流量より10%以上多い体積流量の変化を確実に検出するために使用されうる。
【0047】
[0051]臨界流オリフィス粒子センサとともに流れ誤差を生じうる可能性のある2つの条件がある。最初の条件は、真空レベル320(AP4)が、臨界流の維持に必要な真空レベルを下回る場合である。これは、例えば、真空源300の故障や真空源と粒子センサとの間に漏れがある場合に起こりうる。この条件が起こると、臨界流オリフィス410は、粒子センサ内に、より少量の周囲空気流を引き込み始める。流れ測定オリフィス120(DP1)に及ぼす影響は、ベルヌーイ方程式から求められ、方程式(3)から、流れ測定オリフィス400の両端の圧力降下120の変化が、流量の平方だけ低減する。言い換えれば、体積流量が10%減少すると、測定される差圧(120)が19%降下する。
【0048】
[0052]圧力降下の変化と流量との間のこのような関係は、流量の変化を検出するための差圧センサの精度要求が活かされるために有益である。例えば、10%の流量損失が検出される要求を有する粒子センサは、19%の圧力変化を確実に検出しなければならない差圧センサ120を必要とする。このような要求は、低コスト差圧センサ(例えば、現在のコストはわずか10ドル)で満たされえ、より高価な圧力センサ、または渦流ブロワなどの流量を調整する他の高価なデバイスを必要としない。したがって、一態様において、記載される粒子センサのいずれかが、ブロワまたは流量を調整する他のコンポーネントなどの任意の流量調整デバイスを有していない。
【0049】
[0053]臨界流オリフィス粒子センサに流れ誤差を生じうる他の条件は、粒子センサの入口にある障害物によって引き起こされるような入口圧力降下の変化である。図3を参照すると、この変化は、例えば、空気流入口チューブ20または入口オリフィス130にある障害物から生じうる。この状況によって引き起こされる流量損失はまた、ベルヌーイ方程式(3)および理想気体の法則(4)からも予測可能である。
【0050】
[0054]理想気体の法則:ρ=PM/RT (4)
ρ=密度(kg/m3)
P=圧力(kPa)
M=空気のモル質量(28.97kg/kmol)
R=気体定数(8.314kJ/kmol・K
T=温度(°K)
【0051】
[0055]噴入口に障害物があると、噴入口の両端での差圧降下が増加し、結果的に、図1に示すような光学ブロック200で測定されるAP2 122(BP)が減少する。したがって、臨界オリフィス入口圧力310(AP3)は、周囲環境124(AP1)に対して負圧になる。
【0052】
[0056]臨界流オリフィスは、入口圧力310(AP3)の体積流量を維持し続ける。しかしながら、これは、周囲環境から引き込まれた体積流量と同じではない。システム内に引き込まれた流量損失は線形関係である。入口流量が10%低下することは、AP1またはAP2とAP3との間の差圧の差が10%になることに関連する。
【0053】
[0057]また、流れ測定オリフィスに及ぼす影響は、予測可能である。流れ測定オリフィス400に関連付けられたセンサ120(DP)は、オリフィスの絶対気圧を参照する場合、体積流量は低下することなく、絶対気圧が10%低下した空気圧にさらされる。これは、標高の変化によって誘導される測定誤差との相違はない。絶対気圧AP2(BP)122と、オリフィス400の両端にある差圧(DP1)120との間には線形関係がある。入口フローが10%低減すると、AP2(BP)122の絶対圧力は10%低減し、流れ測定オリフィス(DP2)の両端の差圧120は10%減少する。
【0054】
[0058]このような検出は、システム真空損失によって生じる流量損失に比べて検出が非常に困難である(10%の流量損失の検出に、19%程度の圧力差が使用されうる)。10%の流量損失を検出するために使用される差圧センサ120は、10%の圧力損失を確実に検出可能でなければならない。これにより、高い再現性、正確性および感度を有するセンサを使用するには、典型的に、低コスト差圧センサのコストの10倍を超えるコストがかかる。
【0055】
[0059]図2を参照すると、高コストセンサまたは他の流量制御デバイスの必要性は、2つの低コスト絶対圧センサ(124および122)、すなわち、粒子センサを囲む周囲空気圧(AP)および基準圧力122(BP)と、流れ測定オリフィス400の両端の圧力降下(ひいては、流量)をモニタリングする1つの低コスト差圧センサ120とを使用することによって回避される。センサ120、122および124の各々は、粒子センサに導入されるガスの流動状態(例えば、許容、警告、誤差)を特定するために、モニタ500、および本明細書に記載するようなセンサの出力を処理する関連付けられた電子装置によって使用される。
【0056】
[0060]入口制約によって引き起こされる周囲空気流の10%損失は、周囲環境(124)と臨界オリフィス入口圧力(310)との間の10%圧力差分によってのみ生じうる。海面気圧(407水柱インチ絶対気圧)では、この10%差は40.7水柱インチになる。これは、典型的に、1.5%の最大感度または精度(6.9水柱インチ)を有する利用可能な低コスト絶対圧センサの精度仕様の範囲以内にある。
【0057】
[0061]例3:流動状態を特定するためのアルゴリズム
[0062]1つの低コスト差圧センサおよび2つの低コスト絶対圧センサを使用することによって、粒子センサの体積流量をモニタリングするためのデバイスおよび方法が提供される。この方法の焦点は、10%精度より高いこと(例えば、目標流量から10%以上の逸脱を確実に検出可能)、および安価であることを兼ね備えた低コストインテリジェントフローモニタリングの手段を作り出すことである。
【0058】
[0063]適切な差圧センサ120の一例は、Freescale(登録商標)Semiconductor MPXV5004DPである。このセンサは、較正温度から+/−5℃の温度範囲で、+/−2.5%フルスケールの精度仕様を有する。粒子センサの流れ測定オリフィスは、ほぼフルスケールで差圧センサを動作するようなサイズにされうる。
【0059】
[0064]精度が、+/−5℃Cを超える温度範囲外には指定されていないため、さらなる誤差は経験的に導き出される必要がある。粒子センサの妥当な温度範囲は+/−15℃である。初期テストによると、較正ポイントから温度範囲を+/−15℃に拡大すると、誤差は+/−7.5%フルスケールに増大しうることが示されている。
【0060】
[0065]適切な絶対圧センサ122および/または124の一例は、Freescale(登録商標)Semiconductor MP3H6115Aである。このセンサは、0〜85℃の温度範囲で、+/−1.5%フルスケール(115KPa)の精度仕様を有する。海面気圧(101.325KPa)で、これは1.7%の測定気圧に相関する。
【0061】
[0066]図2に、インテリジェントフローモニタリングシステムの図が与えられている。AP124は、周囲空気環境の大気圧をモニタリングする絶対圧センサを表す。BP122は、粒子センサの内部光学基準圧力をモニタリングする絶対圧センサを表す。DP120は、流れ測定オリフィスの両端の差圧をモニタリングする差圧センサを表す。APR123は、周囲環境圧力に対する内部光学基準圧力の比を表す。モニタ500が、ユーザに流動状態の指示を与える。図2を参照すると、モニタは、差圧センサ120(DP)、大気圧センサ124(AP)および基準圧力センサ122(BP)に操作可能に接続される。センサ120、122および124から得られるさまざまなパラメータ(例えば、方程式(5)〜(12)を参照)間の関係によれば、モニタは、許容範囲の流動状態(許容範囲内の流れ)または流れ誤差(許容範囲外の流れ)など、ユーザに対して流動状態を特定する。モニタは、流動状態誤差を知らせるために、単にアラーム(視覚および/または音声)を発してもよい。任意に、モニタは、例えば、システムの電源を切ったり、ガス流を止めたりすることによって、粒子センサ106を自動的にオフにしてもよい。
【0062】
[0067]表1に、変数名およびその説明の一覧が与えられる。表1は、較正中またはセンサ動作中など、変数の測定時に関する詳細を与える。較正は、流動状態にないとき、または較正された(例えば、既知の)流れの間に起こりうる。インサイチュ(in−situ)とは、粒子センサ動作中の測定をさす。「生」とは、センサからのベース出力値をさし、表1にまとめられているように、パラメータの「訂正」値を算出するためのオフセット読取値とともに使用される。
【0063】
[0068]このシステムは、以下の条件下で真空損失に関連付けられた流動状態誤差を特定可能である。
DPIcorr<(1−TOLERANCE)2*DPItarget (5)、または、
DPIcorr>(1+TOLERANCE)2*DPItarget (6)
【0064】
[0069]TOLERANCE=10%=0.1(例えば、目標流量からの逸脱が+/−10%であり、真空誘導された流量損失または真空損失によって引き起こされた流動状態誤差の特定)であるシステムにおいて、方程式(5)および(6)は、それぞれ以下のようになる。
DPIcorrected<0.81*DPItarget (7)、または、
DPIcorrected>1.21*DPItarget (8)
【0065】
[0070]上述したように、真空損失から生じる流れ誤差または不良は、実際、2つの潜在的な流動不良を検出しやすいものである。真空損失により生じる流量損失は、流量に対して平方関数を有する差圧損失を生成する。すなわち、流量が10%変化すると、差圧がほぼ20%変化する。MPXV5004DP圧力センサは、+/−7.5%の精度を有し、10%の流量変化を確実に特定するために、20%の圧力変化のみを確実に検出しなければならない。圧力センサの精度の誤差バンドは、要求されたシステム精度のほぼ37.5%である。この低コスト差圧センサは、真空システムの変化によって生じる10%流量変化を検出するために信頼性をもって使用されうる。
【0066】
[0071]粒子センサに対して入口制約によって生じる流量損失の場合は、検出がより困難である。大型のハウス真空システムに接続された臨界流オリフィスを有する粒子センサは、小型の内部ブロワまたはポンプを有する携帯可能な粒子カウンタより著しく異なる。
【0067】
[0072]1999年7月16日に出願された「Air Pump for Particle Sensing Using Regenerative Fan, And Associated Methods」という発明の名称の米国特許第6167107号明細書に、携帯可能な粒子カウンタが記載されている。これらのシステムの渦流ブロワは、一般に、ほぼ20水柱インチの最大真空レベルしか生成できない。加えて、ブロワ流量は、入口が制限され、真空レベルが生成可能である最高まで増加するため減少する。ブロワは、システム流量がゼロに崩壊する同じ点で最高真空レベルに達する。
【0068】
[0073]これらの携帯可能な粒子カウンタは、20水柱インチより高い差圧降下を生成する入口制約にさらされると、流量が完全に崩壊する。407.8水柱インチの海面気圧(1気圧)で、20水柱インチの差圧降下は、周囲空気圧からの4.9%降下に相当する。したがって、20水柱インチの入口制約は、ブロワが十分な真空を生成できないために流れが崩壊を始める前に、4.9%の流量の降下を引き起こすのみである。この問題により流れが崩壊すると、差圧センサの両端にかかる差圧の変化は、システムに対して真空損失によって引き起こされる流量損失の場合と同様に応答する。
【0069】
[0074]ハウス真空システムに接続された粒子センサの場合、ハウス真空システムは、極めて高い真空レベルを生成しうる。典型的なハウス真空システムは、244.7水柱インチ(18水銀柱インチ)以上の真空レベルを生成する。海面気圧にある例示されたシステムの臨界流オリフィスで臨界流に達するのに必要な真空レベルの最低量は、216.2水柱インチ(15.9水銀柱インチ)である。したがって、ハウスシステムは、少なくとも、216.2水柱インチの最低真空レベルを生成しなければならない。
【0070】
[0075]ハウス真空システムで稼働する粒子センサは、システム流量が真空レベルの崩壊により降下する前に、著しい入口制約にさらされうる。40.7水柱インチの差圧入口制約により、407.8水柱インチの海面気圧で10%流量損失を生成する。真空損失による流量損失は、ハウス真空レベルが、臨界流オリフィスの最低真空要求(216.2水柱インチ)より少なくとも40.7水柱インチ大きいものである限り起こらない。
【0071】
[0076]このシナリオでは、流れ測定オリフィスの両端の差圧は、真空損失による流量損失の場合のように、流量損失と平方関係にない。むしろ、差圧は、流量損失と線形関係を有する。これは、流れ測定オリフィスが標高の変化にさらされる場合に存在する関係と同じである。
【0072】
[0077]臨界流オリフィスは、適切な体積流量を引き込み続けるが、ここで、光学的基準の外側の周囲気圧124(AP)ではなく、光学的基準の気圧122(BP)を参照する。周囲環境から引き込まれた体積流量は、光学的基準と周囲圧力との比123(APR)によって低減される。流れ測定オリフィス400は、光学的基準圧力122と周囲圧力124の比123によっても低減されるより低い差圧120を生じる。周囲環境からの10%の流量損失は、差圧120の10%降下を生じる。
【0073】
[0078]入口制約によって生じる10%の流量変化は、10%の差圧変化を生じる。MPXV5004DP圧力センサの精度は+/−7.5%であり、わずか10%の圧力変化を確実に検出しなければならない。圧力センサ精度の誤差バンドは、要求されたシステム精度のほぼ75%である。この低コスト差圧センサは、入口制約によって生じる10%の流量変化を検出するために信頼性をもって使用できない。
【0074】
[0079]流量の変化が、光学的基準気圧と周囲気圧との比の変化によって引き起こされるため、この比は、入口制約によって誘導される流量損失を予測するために代わりに使用されうる。
【0075】
[0080]この例において、本出願人らは、Freescale(登録商標)Semiconductor MP3H6115Aである絶対圧センサを使用した。このセンサは、0〜85℃の温度範囲で、+/−1.5%フルスケール(115KPa)の精度仕様を有する。海面気圧(101.325KPa)で、これは1.7%の測定気圧に相関する。この応用では、2つの圧力センサ測定が要求される。業界標準は、求積法で1.7%精度仕様を追加することである。すなわち、(1.72+1.72)1/2=2.4=2.4%。
【0076】
[0081]10%の流量変化を引き起こす入口制約は、10%の差圧(DP)変化を生じさせる。2つのMP3H6115A圧力センサは、2.4%の組み合わせ精度を有し、10%の圧力差を確実に検出するものでなければならない。圧力センサ精度の誤差バンドは、要求されるシステム精度のほぼ24%である。これらの低コスト絶対圧センサは、入口制約によって生じる10%流量変化を検出するために信頼性をもって使用されうる。
【0077】
[0082]入口制約によって引き起こされるユーザ定義の許容レベルの合否基準は、
APRinsitu<APRcalibration×(1−TOLERANCE) (9)、または、
APRinsitu>APRcalibration×(1+TOLERANCE) (10)
のように、目標流量からのTOLERANCEレベルの逸脱が大きい場合に、流量不良であるという流動状態である。
【0078】
[0083]入口制約によって引き起こされる10%流量変化のTOLERANCEの合否基準は、
APRinsitu<APRcalibration×0.9 (11)、または、
APRinsitu>APRcalibration×1.1 (12)
の条件である場合、流動状態誤差(例えば、10%より高い流量の逸脱)として特定される。
【0079】
[0084]システムが、流れ測定オリフィスの絶対気圧(この例では、光学的基準と同じ)を補償するため、システムは、さまざまな標高で精度を維持する。このようにして、システムは、ある標高で較正可能であり(例えば、製造業者によって)、異なる標高で別の場所(例えば、顧客)に出荷されたときに較正が維持される。システムはまた、天候による局所的な気圧の変化を補償する。絶対気圧の補償は、フローモニタリングアルゴリズムの以下の部分によって対処される。
DPItarget=DPCcorrected*(BPIcorrected/BPCcorrected) (13)
【0080】
[0085]システムは、局所的な気圧の変化および高度の変化を補償する。システムは、差圧(DP)の19%降下をモニタリングすることによって、真空損失によって誘導された10%流量損失を検出する。システムは、(AP)と(BP)との間の差圧の10%降下をモニタリングすることによって、入口制約によって誘導される10%流量損失を検出する。このようにして、低コストのDP(120)、AP(124)およびBP(122)センサは、10%程に低い流量損失を確実に検出するために使用されてもよい。これらの圧力センサの各々は、低コストで購入できるため、結果的に得られる粒子センサは低コストを維持しながらも、粒子センサのコストを実質的に増加することなくインテリジェントフローモニタリングを提供する。
【0081】
[0086]図3は、粒子センサ106と、粒子センサ106内に空気を引き込む真空源300を含む関連付けられた空気流の仕組みのさらなる詳細を示す。また、図3は、体積流量をモニタリングするために粒子センサ106によって使用されるセンサ120、122、124の配置を示す。特に、センサ120、122および124からの出力(本明細書において提供されるような出力およびその後のアルゴリズム処理など)は、流動状態がユーザに提供されるモニタ500に向けられる。真空源300が、下流チューブ146と流通状態にするために接続された入口オリフィス130と、空気101Aの流れ138内の微粒子を評価するための粒子カウンタ132(例えば、光学ブロック200)とを通して、粒子センサ106内に空気101Aを引き込む。粒子センサ106は、流れ138を作るために、空気流チューブ20を含むことが好ましい。当技術分野において知られているように、流れ138の粒子を表す散乱エネルギー140が、検出器142によって検出されるように、レーザ134が、流れ138を照明するレーザビーム136を発生させる。粒子検知電子装置144が、選択された目標体積流量、例えば、1CFMに対してこれらの粒子を定量化するために、検出器142から信号ライン145を通る信号を評価する。
【0082】
[0087]真空源300は、カウンタ132から接続チューブ146と、空気流と、内部大気センサ120、122とを通して空気101A’をさらに引き込む。空気流センサ120は、図4と関連して記載された制約(例えば、流れ測定オリフィス400)にわたって空気101A’の空気流を測定し、内部大気センサ(例えば、基準圧力センサ)122は、センサ106内の圧力を測定する。一態様において、センサ122は、光学ブロック200(カウンタ132に対応)の圧力を測定する。真空源300が、接続チューブ148を通して排気口に空気101A’を流す。
【0083】
[0088]大気圧センサ124は、センサ106に流入する周囲空気101の絶対圧を提供する。センサ120、122、124からの出力は、表1にまとめられているように、パラメータを算出することで流量をモニタリングするために使用される。
【0084】
[0089]図4は、センサ106内の体積流量をモニタリングするためのセンサ106内の圧力検知の原理を示す。サンプルチューブ146の空気101A’の流量(分子/秒)または体積流量(空気量/秒)は、制約オリフィス400の両端の差圧センサ120によって算出される。圧力センサ122は、センサ106内の空気の密度(例えば、圧力)を測定する。所望の体積流量で粒子数を得るために、体積流量は、差圧センサ120および圧力センサ122のそれぞれによって与えられる流量ならびに大気圧によって決定される。圧力センサ122は、センサ106内のどの場所でも設けられうる(例えば、光学ブロック200など)。米国特許第6167107号明細書に、システムのさらなる詳細が与えられる。
【0085】
[0090]本出願中のすべての参考文献、例えば、特許証が発行された特許もしくは特許権が付与された特許を含む特許文献または均等物、特許出願公報、および、非特許文献または他の出典資料の内容全体は、各参照が本出願における開示と矛盾しない範囲で、参照により個々に組み込まれているかのように参照により援用されたものとする(例えば、部分的に矛盾する参考文献は、参考文献のうち部分的に矛盾した部分を除き、参照により援用されたもとする)。
【0086】
[0091]本明細書において用いた用語および表現は、限定的なものではなく、説明のためのものとして使用されており、このような用語および表現の使用において、図示、かつ説明された特徴またはそれらの一部のいかなる均等物も排除することを意図していないが、本発明の特許請求の範囲内で種々の修正が可能であることを認識されたい。したがって、好ましい実施形態、例示的な実施形態および任意選択の特徴によって本発明を詳細に開示してきたが、本明細書において開示された概念の修正および変形は、当業者によって行われてもよく、このような修正および変形は、添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることを理解されたい。当業者であれば、本明細書で提供された特定の実施形態は、本発明の有用な実施形態の例であり、本発明は、本明細書に示すデバイス、デバイスコンポーネント、方法ステップの多数の変形を使用して実行されてもよいことが明らかであろう。当業者には明らかなように、本発明の方法に有用な方法およびデバイスは、多数の任意選択の組成、ならびに処理要素および処理ステップを含みうる。
【0087】
[0092]置換基群が本明細書において開示されている場合、その置換基群のすべての個々の要素およびすべての亜群が別々に開示されることを理解されたい。本明細書においてマーカッシュ形式の群または他の群が使用される場合、群のすべての個々の要素、ならびに群の可能なすべての組み合わせおよび一部組み合わせが本開示に個別に含まれるものと意図される。
【0088】
[0093]本明細書に記載もしくは例示された成分のあらゆる調合物または組み合わせは、特に明記されない限り、本発明を実施するために使用されうる。
【0089】
[0094]範囲、例えば、温度範囲、サイズもしくは距離範囲、時間範囲、速度、電圧、圧力もしくは圧力比率、組成または濃度範囲が本発明細書に与えられている場合はいつでも、すべての中間範囲および部分範囲、ならびに所与の範囲に含まれるすべての個々の値は、本開示に含まれることが意図されたものである。本明細書に含まれている範囲または部分範囲の任意の部分範囲または個々の値は、本明細書の特許請求の範囲から除外できることを理解されたい。
【0090】
[0095]明細書で述べられたすべての特許および刊行物は、本発明が関係する当業者の技術レベルを示している。本明細書に引用された参考文献の内容全体は、それらの刊行日または出願日の時点での最新技術を示すために、本明細書に参照により援用され、この情報は、必要に応じて、先行技術である特定の実施形態を除外するために本明細書において用いられうる。例えば、物質組成が請求される場合、本出願人の発明に先立って当技術分野において既知で利用可能な化合物は、本明細書で引用された参考文献に使用可能な開示が提供されている化合物を含み、本明細書の物質組成の特許請求の範囲に含まれることを意図したものではないことを理解されたい。
【0091】
[0096]本明細書において使用される場合、「備える(comprising)」は、「含む(including)」、「含む(containing)」、または「を特徴とする(characterized by)」と同義であり、包括的(inclusive)または非限定的(open−ended)であり、追加要素、記載されていない要素または方法ステップを排除しない。本明細書において使用される場合、「からなる(consisting of)」は、請求項の要素に指定されていない任意の要素、ステップまたは成分も排除する。本明細書において使用される場合、「本質的に〜からなる(consisting essentially of)」は、請求項の基本的および新規な特徴に実質的に影響を与えない材料またはステップを排除しない。本明細書の各例において、「備える(comprising)」、「本質的に〜からなる(consisting essentially of)」および「からなる(consisting of)」という用語のいずれも他の2つの用語のいずかに置き換えてもよい。本明細書において例示的に記載した本発明は、本明細書において詳細には開示されていない1つまたは複数の任意の要素、1つまたは複数の限定がない状態でも適切に実施されてもよい。
【0092】
[0097]任意のこのような材料および方法の、当技術分野において既知のすべての機能的均等物は、本発明に含まれることが意図される。用いた用語および表現は、限定的なものはなく、説明するものとして使用され、このような用語および表現の使用において図示および説明された特徴またはそれらの一部のいかなる均等物も排除することを意図していないが、請求された本発明の特許請求の範囲内でさまざまな修正が可能であることを認識されたい。したがって、本発明は、好ましい実施形態によって詳細に開示されたが、本明細書において開示された概念の任意選択の特徴、修正および変形は、当業者によって行われてもよく、このような修正および変形は、添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることを理解されたい。
【0093】
【表1】

【関連出願の相互参照】
【0001】
[0001]本願は、2009年8月24日に出願された米国仮特許出願第61/236318号明細書の利益を主張し、同出願は、本開示と矛盾しない範囲で本明細書に参照により援用されたものとする。
【背景技術】
【0002】
[0002]多くの分野において、エアロゾル光学粒子センサが重要である。例えば、マイクロ汚染関連の産業は、汚染の定量評価を与えるためにエアロゾル光学粒子センサを使用することに依存している。エアロゾル光学粒子センサは、クリーンルームやクリーンゾーンにおける空中浮遊粒子の汚染を測定する使用目的で採用されている。一般に、これらの粒子センサは低コストであり、センサに通す必要のある空気流を発生させるための内部ポンプに依存しない。その代わりとして、粒子センサは、流れを発生させるためにハウス真空(house vacuum)システムへの接続に依存する。流量は、一般に、粒子センサに配置された低コストの臨界流オリフィスに真空システムを接続することによって制御される。粒子センサによって検出される粒子の濃度を正確に定量化するために、センサに投入されるガスの流量は既知のものでなければならない。例えば、検出されない流量が15%低減すると、粒子汚染濃度レベルの判定値が実際より15%低くなる。したがって、センサによってサンプリングされているガスの流量が測定されるか、またはユーザ指定のレベルから流量が外れたことをユーザに表示するために警告が正確に発せられることが重要である。
【0003】
[0003]体積流量を制御するための臨界流オリフィスは、流量の維持を確保するためのよく知られている技法である。臨界流オリフィスは、当技術分野において十分に確立されている(例えば、Willeke/Baron著、「Aerosol Measurement」、およびHinds著、「Aerosol Technology」を参照されたい)。臨界流オリフィスは、非常に優れた低コスト体積流制御デバイスであるが、このようなオリフィスは、低コストかつ正確に体積流量をモニタリングする能力を備えていない。既製の流量センサも利用可能であるが、粒子センサ当たり数百ドルのコストがかかる。1999年7月16日に出願された「Air Pump for Particle Sensing Using Regenerative Fan, and Associated Methods」という発明の名称の米国特許第6167107号明細書に記載されているように、粒子センサに内部フローモニタリングを追加することもできる。しかしながら、このような内部フローモニタリングは、総コストが100ドルを超える流量センシングデバイスが必要になる。このようなコストがかかることにより、低コストのエアロゾル光学粒子センサにこのようなデバイスを使用することは実用的ではない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
[0004]以上のことから、粒子センサにコストや複雑性を著しく増加させることなく、粒子センサにおける流量を高精度かつ信頼性をもってモニタ可能なインテリジェントフローモニタリングシステムが必要とされている。したがって、本発明の1つの目的は、粒子センサにおける流量をモニタリングし、流量が目標流量から外れたときを特定して適切な救済策をとることができるようにするためのデバイスおよび方法を提供することである。
【課題を解決するための手段】
【0005】
[0005]本明細書において、サンプリングガスの流量を信頼性をもってモニタ可能な高精度体積流モニタリングデバイスを有する低コスト粒子センサが提供される。特に、本明細書において提供されるデバイスおよび方法は、検出されないままになりうるセンサ内での逆流事象を特定するのに有用である。本明細書において提示されるシステムにより、高価な流量センサまたは圧力センサ、および/または制御下にある流量を発生させるためのブロワを必要とせずに粒子センサにフローモニタリングが提供される。その代わり、真空源を介して流れが確実に発生され、本明細書に記載するように流量がモニタリングされうる。
【0006】
[0006]1つの差圧センサおよび2つの絶対圧センサを、これらのセンサの出力に基づいたアルゴリズムとともに使用すると、正確性および低コストを兼ね備えた低コストのインテリジェントフローモニタリング手段を作り出すことが容易にできる。このシステムにより、流動状態誤差、および、任意に、流動状態誤差がフロー入力障害(「上流圧力損失」)に関連するか、または真空損失(「下流真空損失」)に関連するかを正確に評価し特定する能力が得られる。対照的に、従来の粒子センサは、流量のモニタリングはできても、流量状態誤差の理由は区別しない。
【0007】
[0007]一実施形態において、粒子センサを提供することによって粒子センサにおけるガスの体積流量をモニタリングする方法が提供される。粒子センサは、流れ測定オリフィスの両端の差圧を測定するための差圧センサを備える流れ測定オリフィスと、臨界オリフィスと、流れ測定オリフィスおよび臨界オリフィスにわたってガス流を発生させるための真空システムとを有する。臨界オリフィスの下流位置で真空圧力を確立することによって、粒子センサを通してガス流が発生する。センサは任意のガスに浮遊する粒子を検出しうるが、一実施形態において、ガスは、製造施設やクリーンルーム内の空気のような空気である。圧力降下(DP)は、差圧センサなどによって流れ測定オリフィスの両端で求められる。大気圧(AP)および臨界オリフィスの上流位置にある粒子センサ内の圧力(BP)が求められる。DP、APおよびBP値は、流動状態を特定することによって、粒子カウンタの流量をモニタリングするために使用される。
【0008】
[0008]一態様において、流動状態は、許容範囲の流量および流量誤差状態からなる群から選択される。別の態様において、流動状態は流量誤差状態である。
【0009】
[0009]一態様において、本明細書に提供される方法のいずれかは、真空誘導された流量損失または入口誘導された流量損失として流量誤差状態を特定することにさらに関する。
【0010】
[0010]一実施形態において、本発明により、流量誤差状態を特定するためのアルゴリズムが提供される。例えば、真空誘導された流量損失は、
DPIcorr<(1−TOLERANCE)2*DPItarget、または
DPIcorr>(1+TOLERANCE)2*DPItarget
により特定され、
式中、
DPIcorrは、粒子センサ動作中に流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEは、ユーザ選択の流量許容レベルであり、
DPItargetは、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrは、システム較正中の差圧センサ値であり、
BPIcorrは、粒子センサ動作中の基準(bench)圧力値であり、
BPCcorrは、システム較正中の基準圧力値である。
【0011】
[0011]別の実施形態において、この方法は、入口誘導された流量損失を特定するためのものであり、誤差は、
APRinsitu<(1−TOLERANCE)*APRcalibration、または、
APRinsitu>(1+TOLERANCE)*APRcalibration
により特定され、式中、
APRinsituは、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrは、粒子センサ動作中の大気圧値であり、
BPIcorrは、粒子センサ動作中の基準圧力値であり、
TOLERANCEは、ユーザ選択の流量許容レベルであり、
APRcalibrationは、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで
BPCcorrは、較正時の基準圧力値であり、
APCcorrは、較正時の大気圧である。
【0012】
[0012]一実施形態において、TOLERANCE値は、5%以上、かつ15%以下の範囲から選択され、例えば、10%の値である。TOLERANCE値の下限値は、センサの正確性に左右される。特に、差圧センサが10%未満の圧力降下の変化を確実に検出できない場合、TOLERANCE値の下限が事実上10%になる。対照的に、10%の圧力降下の変化を検出可能な差圧センサが、10%以上の任意のTOLERANCE値に対して信頼性をもって使用されてもよい。
【0013】
[0013]一態様において、BPIは、粒子センサの光学ブロック内で測定される。一態様において、流れ測定オリフィスは、臨界オリフィスの上流に配置される。一態様において、真空源はハウス真空である。一態様において、ガスは空気である。
【0014】
[0014]本明細書に記載する方法のいずれかが、モニタリングした流量が目標流量から10%以上外れた流動状態を特定するために使用されてもよい。一態様において、目標流量は、1CFM(毎分立方フィート)の目標流量のようなガスの体積流量である。
【0015】
[0015]別の実施形態において、この方法のいずれかが、前記流動状態の逸脱の原因を特定するステップをさらに備え、この原因は真空誘導された損失または入口誘導された流量損失である。
【0016】
[0016]また、本明細書において、ガス中の粒子を検出し計数するための粒子センサなどのデバイスが提供される。一態様において、本発明は、粒子カウンタと、粒子センサ動作中に流れ測定オリフィスの両端にかかる差圧(DPI)を測定するための差圧センサを備える流れ測定オフリフィスと、臨界流オリフィスと、粒子カウンタ、流れ測定オリフィスおよび臨界流オリフィスの各々を通して周囲ガスを吸引するための真空源と、大気圧(API)を測定するための大気圧センサと、粒子センサの圧力(BPI)を測定するための基準圧力センサと、差圧センサ、大気圧センサおよび基準圧力センサの各々に操作可能に接続され、DPI、APIおよびBPIの値から流動状態を特定するモニタと、を備える粒子センサである。
【0017】
[0017]「モニタ」とは、1つまたは複数の流動状態を特定する検出可能な信号を与える当技術分野において既知の任意のコンポーネントまたはコンポーネントのまとまりをさす。例えば、モニタは、流動状態が流量誤差であるときを示すための信号を発生させるアラームでありうる。あるいは、モニタは、ユーザがセンサにおける流動状態を決定するために検討しうる数値を単に与えるものであってもよい。
【0018】
[0018]一態様において、粒子センサは、粒子センサを通るガスの目標流量からの逸脱が10%以上である流量誤差を示す。
【0019】
[0019]別の態様において、粒子センサは、
DPIcorr<(1−TOLERANCE)2*DPItarget、
DPIcorr>(1+TOLERANCE)2*DPItarget、
APRinsitu<(1−TOLERANCE)*APRcalibration、および
APRinsitu>(1+TOLERANCE)*APRcalibration
によって規定される1つまたは複数の条件を満たす流量誤差を示し、
式中、
DPIcorrは、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEは、ユーザ選択の流量許容レベルであり、
DPItargetは、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで
DPCcorrは、システム較正中の差圧センサ値であり、
BPIcorrは、粒子センサ動作中の基準圧力値であり、
BPCcorrは、システム較正中の基準圧力値であり、
APRinsituは、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで
APIcorrは、粒子センサ動作中の大気圧値であり、
BPIcorrは、粒子センサ動作中の基準圧力値であり、
APRcalibrationは、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで
APCcorrは、較正時の大気圧である。
【0020】
[0020]別の態様において、粒子センサは、許容範囲の流動状態である流動状態を特定し、この場合の許容範囲の流動状態とは、目標流量からの逸脱が10%以下である流量である。許容範囲の流動状態の特定は、粒子センサによる進行中のサンプリングに対応するものであってもよい。
【0021】
[0021]一実施形態において、流れ測定オリフィスは、粒子カウンタと臨界流オリフィスとの間に配置される。別の実施形態において、基準圧力センサは、粒子カウンタの光学ブロック内の圧力を測定する。
【0022】
[0022]別の態様において、本発明は、各センサが低コストであることから、低コストを維持したままセンサが組み込まれた粒子センサを確保するセンサに関する。低コストは、機能性または性能ベースのパラメータから、あるいは絶対的コストの面からなどのあらゆる方法で規定されうる。例えば、低コストのセンサは、圧力変化を検出するためのセンサの感度、再現性または精度を反映したものであってもよい。例えば、ある低コストセンサの最大精度は2.5%(フルスケールスパン)であるのに対して、高コストセンサは、一般に、感度、再現性および精度が高い。あるいは、低コストとは、本明細書において記載される場合、粒子センサにおいて使用されるセンサのコストに関して表されることもある。
【0023】
[0023]いかなる特定の理論に拘束されることを望むことなく、本発明の実施形態に関連する原理または機構に関する見解または理解についての考察が、本明細書において記述される。任意の説明または仮説の最終的な妥当性にかかわらず、本発明の実施形態は、なお機能し有用でありうることを認識されたい。
【図面の簡単な説明】
【0024】
【図1】関連する圧力センサおよび圧力センサの場所をまとめた、粒子センサの略図である。
【図2】粒子センサにおける流動状態をモニタリングするために測定または算出される関連するパラメータを示す、粒子センサの略図である。
【図3】粒子センサおよび空気流の追加の詳細図を示す。
【図4】ベルヌーイ方程式に基づいて流量を算出するために、オリフィスの両端の圧力降下が使用される流れ測定オリフィスを示す。
【発明を実施するための形態】
【0025】
[0028]以下の特許、すなわち、米国特許第5,467,189号明細書、同第5,515,164号明細書、同第5,600,438号明細書、同第4,571,079号明細書、同第4,984,889号明細書、同4,594,715号明細書、同第5,825,487号明細書および同第6,167,107号明細書により、粒子センサおよび空気流システムに関する有用な背景が提供される。上述した各特許は、本開示と矛盾しない範囲で参照により本明細書に組み込まれる。
【0026】
[0029]「流動状態」とは、粒子センサを通して引き込まれて流れるガスのフロー状態をさす。一態様において、流動状態は、モニタリングされる流量と目標流量との比較に基づくものである。目標流量は、粒子センサが使用に校正された流量をさし、一般に、臨界流オリフィスの特性に依存する。一態様において、臨界流オリフィスは、所望の値で固定される目標流量を与えるようなサイズにされる。本明細書において提供されるデバイスおよび方法は、任意の所望の目標流量に適合可能であるが、一実施形態において、目標流量は、1CFMである。(目標流量に対する)許容レベルは、モニタリングされた流量が選択された許容レベル内である限り、粒子センサが通常に動作を続けるように選択される。これを「許容範囲の流動状態」と呼ぶ。しかしながら、フローモニタリングにより、流量が許容レベルの範囲外であることが明らかになる場合、粒子センサは、「流量誤差状態」を示すことができる。加えて、「流量警告状態」は、許容レベルに近づいているが、まだ許容レベルを超えていないモニタリングされた流量に対応するものであってもよい。
【0027】
[0030]本明細書において提供されるデバイスおよび方法は、流量誤差状態の原因を識別可能である。「真空誘導された流量損失」は、粒子センサの下流端での事象をさし、真空源の動作不良、あるいは粒子センサ、および/または真空源接続の漏れなどによって真空損失を引き起こす真空源を伴う。対照的に、「入口誘導された流量損失」は、臨界流オリフィスから上流の場所で圧力降下を生じ増大させる、入口オリフィスまたは入口チューブに向けてもしくはおいてなどの、粒子センサの上流端に特定される障害または他の事象をさす。
【0028】
[0031]「TOLERANCE」は、ユーザ選択またはメーカ選択された値であり、目標流量に対する割合で表されうる。例えば、TOLERANCEが10%になるように選択される場合、デバイスおよび関連する方法は、モニタリングされた流量が目標流量から10%以上外れる場合(例えば、目標流量の110%を超えるか、または目標流量の90%以下)、流動状態誤差を特定する。TOLERANCEは、割合として、または対応する数値として表されてもよい。
【0029】
[0032]一態様において、このシステムのセンサの全コスト(現在の水準)は、少なくとも1000個を一括購入する場合、25ドル未満である。これにより、インテリジェントフローモニタリングを有する結果的に得られる粒子センサも低コストであることが確保される。差圧センサは、所望の圧力差を検出するのに十分な精度の任意の圧力センサである。例えば、10%変化(例えば、TOLERANCE=10%)を高信頼性かつ高精度に検出することが望ましい状況において、適切な差圧センサは、Freescale(登録商法)Semiconductor MPXV5004DP差圧センサであり、適切な絶対圧センサは、Freescale(登録商標)Semiconductor MP3H6155Aを含む。
【0030】
[0033]「操作可能に接続される」とは、モニタおよびセンサなどの要素の構成をさし、一方の要素の作用または反作用が他方の要素に影響を与えるが、各要素の機能を保持したままである。例えば、センサの作用(例えば、圧力変換器からの電圧出力に対応)は、流動状態、特に、流量誤差を特定するために処理される1つまたは複数の変数を決定するために使用されてもよく、それにより、モニタは、流動状態誤差をユーザに警告するための信号を発生させる。この例において、モニタは、センサに操作可能に接続されていると言える。
【0031】
[0034]本発明は、以下の非限定的な例によってさらに理解されうる。本明細書において引用されたすべての参考文献は、本開示と矛盾しない範囲で参照により援用されたものとする。本明細書の記載は多くの詳細を含むが、これらは、本発明の範囲を限定するものとして解釈されるべきではなく、本発明の現時点で好ましい実施形態のいくつかの例示を与えるものにすぎない。例えば、本発明の範囲は、提示した例によってというよりも、添付した特許請求の範囲およびそれらの均等物によって決定されるべきものである。
【0032】
[0035]例1:流量制御用の臨界流オリフィス
[0036]必要とされる要求臨界圧力降下は、以下の式によって与えられる。
【0033】
Pv/Pa=[2/(k+1)]K/(K−1) (1)
Pv=臨界流オリフィスの真空側の圧力
Pa=臨界流オリフィスの上流側の圧力
k=2原子気体=1.4の場合、ガス比熱比=7/5
【0034】
[0037]kに1.4を代入して式を簡潔にする。
Pv/Pa=0.53 (2)
【0035】
[0038]標準状態で、Pa=14.7psiである。したがって、標準状態での要求臨界圧力降下は、7.791psi(15.9水銀柱インチ)である。
【0036】
[0039]標準状態で、臨界流オリフィスは、下流真空レベルが15.9水銀柱インチより大きい場合、一定の体積流量を維持する。これらの条件下において、オリフィスのスロートにおける速度は音速であり、下流真空レベルがさらに増加すると、スロートを通る速度は増加しない。ほとんどの先行技術の粒子センサは、ナイフエッジの臨界流オリフィスを利用している。このオリフィスを利用するには、ユーザは、粒子センサの固有の流量で最小の15.9水銀柱インチ真空レベルを維持可能な真空ポンプシステムを設ける必要がある。
【0037】
[0040]臨界オリフィス粒子センサの流量に誤差を生じうる状態には、2つの固有の状態がある。1つの不良状態は、真空レベルが、臨界流を維持するのに必要な真空レベルを下回る場合である。これは、例えば、ハウス真空システムが能力を失うか、またはハウスシステムと粒子センサへの真空接続との間に障害がある場合に起こりうる。もう1つの不良状態は、粒子センサに対して入口圧力降下の変化がある場合である。これは、例えば、粒子センサの入口にある障害物によって生じうる。
【0038】
[0041]例2:低コストフローモニタリング
[0042]図1は、流量をインテリジェントにモニタリングするために使用されてもよい粒子センサの流体設計上の特徴を詳細に示す。粒子センサは、周囲環境から粒子センサの光学ブロック200内に周囲空気が引き込まれる噴入口を含む。光学ブロックは、移動している空気に浮遊した粒子が、光学ブロックを出る前にレーザビームを通して引き込まれ、光エネルギーを散乱するときに、粒子検出を実行するシステムの部分である。
【0039】
[0043]空気は、流れ測定オリフィス400を通して流される。このオリフィスの両端にある差圧120は、粒子センサを通る流量を測定するために使用される。この差圧は、圧力降下が臨界流オリフィスの要求された圧力降下に直接追加されるときに最小限に抑えられる。次いで、空気は、外部真空システム300によってセンサから吸引される前に、ベンチュリ臨界流オリフィス410を通して流される。臨界流オリフィスは、粒子センサの目標流量を制御するために使用される。外部真空源300は、空気を粒子センサ内に引き込むのに必要な力を供給する。
【0040】
[0044]図1に、いくつかの重要な空気圧ポイントが詳細に示されている。AP1 124は、周囲環境の絶対気圧である。AP2 122は、粒子センサ、この例では、光学ブロック200の粒子センサの絶対気圧である(本明細書において、「基準圧力」BPと呼ぶ)。センサ122は、システムの圧力が確実に測定されるのであれば、粒子センサシステムに沿った場所であればどこに配置されてもよい。一態様において、BPは、臨界オリフィス410の上流の位置で測定される。別の態様において、BPは、流れ測定オリフィス400の上流の位置で測定される。DP2 120は、流れ測定オリフィス400の両端の差圧であり、センサを通る流量を示すものとして使用される。AP3 310は、臨界流オリフィス入口の絶対気圧である。AP4 320は、適用された真空システムの絶対気圧である。DP1 330は、臨界流オリフィスの両端の差圧である。
【0041】
[0045]このシステムは、最小限の要求真空レベルを供給し維持する真空源300の能力に依存しながら、臨界流オリフィスの断面積によって決定される一定の体積流量を維持する。このオリフィスは、周囲環境(AP1)から引き込まれる空気の所望の目標体積流量を達成するように、較正時にサイズ調整されうる。したがって、AP1をモニタリングする能力とともに、AP2をモニタリングする他の圧力ポイントにより、AP1の変動(高度や天候の変化などによる)が、目標体積流量を確実に維持するために考慮されることが確保される。このシステム内への体積流量は、外部真空源300によって生成される真空レベルAP4 320が、臨界流を生成するために臨界流オリフィス410の両端に要求される差圧(330)を生成するのに十分な強さに保たれる限り一定のままであり、上流の圧力降下の変化はない(例えば、124および122:AP1〜AP2、または124および310:AP1〜AP3)。
【0042】
[0046]流量が一定のままである限り、流れ測定オリフィス400の両端の差圧120(例えば、DP2)は一定のままである。これにより、DP2がシステムの流量状態をモニタリングするための優れた選択肢になるが、これはDP2が任意に変化すると、その変化に応じて流量が変化している可能性が示されるためである。
【0043】
[0047]粒子センサが一の観察場所で較正され、次に別の場所に移されれば、周囲空気圧力(124)の著しい変化にさらされうる。絶対気圧は、海面(407水柱インチ)から5000フィートの高度のさらに低いレベル(338水柱インチ)などの海面からの標高に応じて変動する。周囲空気圧(AP)がこのように17%変化することで、粒子センサ内に引き込まれる体積流量は著しく変化しない。臨界流オリフィスの圧力降下は気流音速によって制限され、気流音速は、例えば、海面から5000フィートまでの範囲の標高でほとんど変化しない。
【0044】
[0048]標高が変化すると、流れ測定オリフィスの両端の差圧(DP2)は著しく変化する。通常の粒子センサの動作中に生じる流動状態下において、差圧の変化と体積流量との関係は、ベルヌーイ方程式を用いて表されうる。
【0045】
[0049]Q=K・[(2・ΔP)/ρ]1/2 (3)
Q=体積流量
K=経験的に導かれる定数
ρ=密度
【0046】
[0050]この場合、ΔPの変化は、絶対気圧の変化(および方程式(4)で以下に示す理想気体の法則に反映されているような空気密度ρの対応する変化)による。周囲空気圧が17%低下すると、流れ測定オリフィスの両端の差圧(DP2)が17%低下する。(DP2)が、粒子センサのフロー状態の指示を生成するために使用される場合、周囲空気圧の変化を補償可能なものでなければならない。これは、低コスト(例えば、およそ8ドル)の絶対気圧センサを使用して達成されうる。このタイプのセンサは、1.5%の再現性を有し、目標流量より10%以上多い体積流量の変化を確実に検出するために使用されうる。
【0047】
[0051]臨界流オリフィス粒子センサとともに流れ誤差を生じうる可能性のある2つの条件がある。最初の条件は、真空レベル320(AP4)が、臨界流の維持に必要な真空レベルを下回る場合である。これは、例えば、真空源300の故障や真空源と粒子センサとの間に漏れがある場合に起こりうる。この条件が起こると、臨界流オリフィス410は、粒子センサ内に、より少量の周囲空気流を引き込み始める。流れ測定オリフィス120(DP1)に及ぼす影響は、ベルヌーイ方程式から求められ、方程式(3)から、流れ測定オリフィス400の両端の圧力降下120の変化が、流量の平方だけ低減する。言い換えれば、体積流量が10%減少すると、測定される差圧(120)が19%降下する。
【0048】
[0052]圧力降下の変化と流量との間のこのような関係は、流量の変化を検出するための差圧センサの精度要求が活かされるために有益である。例えば、10%の流量損失が検出される要求を有する粒子センサは、19%の圧力変化を確実に検出しなければならない差圧センサ120を必要とする。このような要求は、低コスト差圧センサ(例えば、現在のコストはわずか10ドル)で満たされえ、より高価な圧力センサ、または渦流ブロワなどの流量を調整する他の高価なデバイスを必要としない。したがって、一態様において、記載される粒子センサのいずれかが、ブロワまたは流量を調整する他のコンポーネントなどの任意の流量調整デバイスを有していない。
【0049】
[0053]臨界流オリフィス粒子センサに流れ誤差を生じうる他の条件は、粒子センサの入口にある障害物によって引き起こされるような入口圧力降下の変化である。図3を参照すると、この変化は、例えば、空気流入口チューブ20または入口オリフィス130にある障害物から生じうる。この状況によって引き起こされる流量損失はまた、ベルヌーイ方程式(3)および理想気体の法則(4)からも予測可能である。
【0050】
[0054]理想気体の法則:ρ=PM/RT (4)
ρ=密度(kg/m3)
P=圧力(kPa)
M=空気のモル質量(28.97kg/kmol)
R=気体定数(8.314kJ/kmol・K
T=温度(°K)
【0051】
[0055]噴入口に障害物があると、噴入口の両端での差圧降下が増加し、結果的に、図1に示すような光学ブロック200で測定されるAP2 122(BP)が減少する。したがって、臨界オリフィス入口圧力310(AP3)は、周囲環境124(AP1)に対して負圧になる。
【0052】
[0056]臨界流オリフィスは、入口圧力310(AP3)の体積流量を維持し続ける。しかしながら、これは、周囲環境から引き込まれた体積流量と同じではない。システム内に引き込まれた流量損失は線形関係である。入口流量が10%低下することは、AP1またはAP2とAP3との間の差圧の差が10%になることに関連する。
【0053】
[0057]また、流れ測定オリフィスに及ぼす影響は、予測可能である。流れ測定オリフィス400に関連付けられたセンサ120(DP)は、オリフィスの絶対気圧を参照する場合、体積流量は低下することなく、絶対気圧が10%低下した空気圧にさらされる。これは、標高の変化によって誘導される測定誤差との相違はない。絶対気圧AP2(BP)122と、オリフィス400の両端にある差圧(DP1)120との間には線形関係がある。入口フローが10%低減すると、AP2(BP)122の絶対圧力は10%低減し、流れ測定オリフィス(DP2)の両端の差圧120は10%減少する。
【0054】
[0058]このような検出は、システム真空損失によって生じる流量損失に比べて検出が非常に困難である(10%の流量損失の検出に、19%程度の圧力差が使用されうる)。10%の流量損失を検出するために使用される差圧センサ120は、10%の圧力損失を確実に検出可能でなければならない。これにより、高い再現性、正確性および感度を有するセンサを使用するには、典型的に、低コスト差圧センサのコストの10倍を超えるコストがかかる。
【0055】
[0059]図2を参照すると、高コストセンサまたは他の流量制御デバイスの必要性は、2つの低コスト絶対圧センサ(124および122)、すなわち、粒子センサを囲む周囲空気圧(AP)および基準圧力122(BP)と、流れ測定オリフィス400の両端の圧力降下(ひいては、流量)をモニタリングする1つの低コスト差圧センサ120とを使用することによって回避される。センサ120、122および124の各々は、粒子センサに導入されるガスの流動状態(例えば、許容、警告、誤差)を特定するために、モニタ500、および本明細書に記載するようなセンサの出力を処理する関連付けられた電子装置によって使用される。
【0056】
[0060]入口制約によって引き起こされる周囲空気流の10%損失は、周囲環境(124)と臨界オリフィス入口圧力(310)との間の10%圧力差分によってのみ生じうる。海面気圧(407水柱インチ絶対気圧)では、この10%差は40.7水柱インチになる。これは、典型的に、1.5%の最大感度または精度(6.9水柱インチ)を有する利用可能な低コスト絶対圧センサの精度仕様の範囲以内にある。
【0057】
[0061]例3:流動状態を特定するためのアルゴリズム
[0062]1つの低コスト差圧センサおよび2つの低コスト絶対圧センサを使用することによって、粒子センサの体積流量をモニタリングするためのデバイスおよび方法が提供される。この方法の焦点は、10%精度より高いこと(例えば、目標流量から10%以上の逸脱を確実に検出可能)、および安価であることを兼ね備えた低コストインテリジェントフローモニタリングの手段を作り出すことである。
【0058】
[0063]適切な差圧センサ120の一例は、Freescale(登録商標)Semiconductor MPXV5004DPである。このセンサは、較正温度から+/−5℃の温度範囲で、+/−2.5%フルスケールの精度仕様を有する。粒子センサの流れ測定オリフィスは、ほぼフルスケールで差圧センサを動作するようなサイズにされうる。
【0059】
[0064]精度が、+/−5℃Cを超える温度範囲外には指定されていないため、さらなる誤差は経験的に導き出される必要がある。粒子センサの妥当な温度範囲は+/−15℃である。初期テストによると、較正ポイントから温度範囲を+/−15℃に拡大すると、誤差は+/−7.5%フルスケールに増大しうることが示されている。
【0060】
[0065]適切な絶対圧センサ122および/または124の一例は、Freescale(登録商標)Semiconductor MP3H6115Aである。このセンサは、0〜85℃の温度範囲で、+/−1.5%フルスケール(115KPa)の精度仕様を有する。海面気圧(101.325KPa)で、これは1.7%の測定気圧に相関する。
【0061】
[0066]図2に、インテリジェントフローモニタリングシステムの図が与えられている。AP124は、周囲空気環境の大気圧をモニタリングする絶対圧センサを表す。BP122は、粒子センサの内部光学基準圧力をモニタリングする絶対圧センサを表す。DP120は、流れ測定オリフィスの両端の差圧をモニタリングする差圧センサを表す。APR123は、周囲環境圧力に対する内部光学基準圧力の比を表す。モニタ500が、ユーザに流動状態の指示を与える。図2を参照すると、モニタは、差圧センサ120(DP)、大気圧センサ124(AP)および基準圧力センサ122(BP)に操作可能に接続される。センサ120、122および124から得られるさまざまなパラメータ(例えば、方程式(5)〜(12)を参照)間の関係によれば、モニタは、許容範囲の流動状態(許容範囲内の流れ)または流れ誤差(許容範囲外の流れ)など、ユーザに対して流動状態を特定する。モニタは、流動状態誤差を知らせるために、単にアラーム(視覚および/または音声)を発してもよい。任意に、モニタは、例えば、システムの電源を切ったり、ガス流を止めたりすることによって、粒子センサ106を自動的にオフにしてもよい。
【0062】
[0067]表1に、変数名およびその説明の一覧が与えられる。表1は、較正中またはセンサ動作中など、変数の測定時に関する詳細を与える。較正は、流動状態にないとき、または較正された(例えば、既知の)流れの間に起こりうる。インサイチュ(in−situ)とは、粒子センサ動作中の測定をさす。「生」とは、センサからのベース出力値をさし、表1にまとめられているように、パラメータの「訂正」値を算出するためのオフセット読取値とともに使用される。
【0063】
[0068]このシステムは、以下の条件下で真空損失に関連付けられた流動状態誤差を特定可能である。
DPIcorr<(1−TOLERANCE)2*DPItarget (5)、または、
DPIcorr>(1+TOLERANCE)2*DPItarget (6)
【0064】
[0069]TOLERANCE=10%=0.1(例えば、目標流量からの逸脱が+/−10%であり、真空誘導された流量損失または真空損失によって引き起こされた流動状態誤差の特定)であるシステムにおいて、方程式(5)および(6)は、それぞれ以下のようになる。
DPIcorrected<0.81*DPItarget (7)、または、
DPIcorrected>1.21*DPItarget (8)
【0065】
[0070]上述したように、真空損失から生じる流れ誤差または不良は、実際、2つの潜在的な流動不良を検出しやすいものである。真空損失により生じる流量損失は、流量に対して平方関数を有する差圧損失を生成する。すなわち、流量が10%変化すると、差圧がほぼ20%変化する。MPXV5004DP圧力センサは、+/−7.5%の精度を有し、10%の流量変化を確実に特定するために、20%の圧力変化のみを確実に検出しなければならない。圧力センサの精度の誤差バンドは、要求されたシステム精度のほぼ37.5%である。この低コスト差圧センサは、真空システムの変化によって生じる10%流量変化を検出するために信頼性をもって使用されうる。
【0066】
[0071]粒子センサに対して入口制約によって生じる流量損失の場合は、検出がより困難である。大型のハウス真空システムに接続された臨界流オリフィスを有する粒子センサは、小型の内部ブロワまたはポンプを有する携帯可能な粒子カウンタより著しく異なる。
【0067】
[0072]1999年7月16日に出願された「Air Pump for Particle Sensing Using Regenerative Fan, And Associated Methods」という発明の名称の米国特許第6167107号明細書に、携帯可能な粒子カウンタが記載されている。これらのシステムの渦流ブロワは、一般に、ほぼ20水柱インチの最大真空レベルしか生成できない。加えて、ブロワ流量は、入口が制限され、真空レベルが生成可能である最高まで増加するため減少する。ブロワは、システム流量がゼロに崩壊する同じ点で最高真空レベルに達する。
【0068】
[0073]これらの携帯可能な粒子カウンタは、20水柱インチより高い差圧降下を生成する入口制約にさらされると、流量が完全に崩壊する。407.8水柱インチの海面気圧(1気圧)で、20水柱インチの差圧降下は、周囲空気圧からの4.9%降下に相当する。したがって、20水柱インチの入口制約は、ブロワが十分な真空を生成できないために流れが崩壊を始める前に、4.9%の流量の降下を引き起こすのみである。この問題により流れが崩壊すると、差圧センサの両端にかかる差圧の変化は、システムに対して真空損失によって引き起こされる流量損失の場合と同様に応答する。
【0069】
[0074]ハウス真空システムに接続された粒子センサの場合、ハウス真空システムは、極めて高い真空レベルを生成しうる。典型的なハウス真空システムは、244.7水柱インチ(18水銀柱インチ)以上の真空レベルを生成する。海面気圧にある例示されたシステムの臨界流オリフィスで臨界流に達するのに必要な真空レベルの最低量は、216.2水柱インチ(15.9水銀柱インチ)である。したがって、ハウスシステムは、少なくとも、216.2水柱インチの最低真空レベルを生成しなければならない。
【0070】
[0075]ハウス真空システムで稼働する粒子センサは、システム流量が真空レベルの崩壊により降下する前に、著しい入口制約にさらされうる。40.7水柱インチの差圧入口制約により、407.8水柱インチの海面気圧で10%流量損失を生成する。真空損失による流量損失は、ハウス真空レベルが、臨界流オリフィスの最低真空要求(216.2水柱インチ)より少なくとも40.7水柱インチ大きいものである限り起こらない。
【0071】
[0076]このシナリオでは、流れ測定オリフィスの両端の差圧は、真空損失による流量損失の場合のように、流量損失と平方関係にない。むしろ、差圧は、流量損失と線形関係を有する。これは、流れ測定オリフィスが標高の変化にさらされる場合に存在する関係と同じである。
【0072】
[0077]臨界流オリフィスは、適切な体積流量を引き込み続けるが、ここで、光学的基準の外側の周囲気圧124(AP)ではなく、光学的基準の気圧122(BP)を参照する。周囲環境から引き込まれた体積流量は、光学的基準と周囲圧力との比123(APR)によって低減される。流れ測定オリフィス400は、光学的基準圧力122と周囲圧力124の比123によっても低減されるより低い差圧120を生じる。周囲環境からの10%の流量損失は、差圧120の10%降下を生じる。
【0073】
[0078]入口制約によって生じる10%の流量変化は、10%の差圧変化を生じる。MPXV5004DP圧力センサの精度は+/−7.5%であり、わずか10%の圧力変化を確実に検出しなければならない。圧力センサ精度の誤差バンドは、要求されたシステム精度のほぼ75%である。この低コスト差圧センサは、入口制約によって生じる10%の流量変化を検出するために信頼性をもって使用できない。
【0074】
[0079]流量の変化が、光学的基準気圧と周囲気圧との比の変化によって引き起こされるため、この比は、入口制約によって誘導される流量損失を予測するために代わりに使用されうる。
【0075】
[0080]この例において、本出願人らは、Freescale(登録商標)Semiconductor MP3H6115Aである絶対圧センサを使用した。このセンサは、0〜85℃の温度範囲で、+/−1.5%フルスケール(115KPa)の精度仕様を有する。海面気圧(101.325KPa)で、これは1.7%の測定気圧に相関する。この応用では、2つの圧力センサ測定が要求される。業界標準は、求積法で1.7%精度仕様を追加することである。すなわち、(1.72+1.72)1/2=2.4=2.4%。
【0076】
[0081]10%の流量変化を引き起こす入口制約は、10%の差圧(DP)変化を生じさせる。2つのMP3H6115A圧力センサは、2.4%の組み合わせ精度を有し、10%の圧力差を確実に検出するものでなければならない。圧力センサ精度の誤差バンドは、要求されるシステム精度のほぼ24%である。これらの低コスト絶対圧センサは、入口制約によって生じる10%流量変化を検出するために信頼性をもって使用されうる。
【0077】
[0082]入口制約によって引き起こされるユーザ定義の許容レベルの合否基準は、
APRinsitu<APRcalibration×(1−TOLERANCE) (9)、または、
APRinsitu>APRcalibration×(1+TOLERANCE) (10)
のように、目標流量からのTOLERANCEレベルの逸脱が大きい場合に、流量不良であるという流動状態である。
【0078】
[0083]入口制約によって引き起こされる10%流量変化のTOLERANCEの合否基準は、
APRinsitu<APRcalibration×0.9 (11)、または、
APRinsitu>APRcalibration×1.1 (12)
の条件である場合、流動状態誤差(例えば、10%より高い流量の逸脱)として特定される。
【0079】
[0084]システムが、流れ測定オリフィスの絶対気圧(この例では、光学的基準と同じ)を補償するため、システムは、さまざまな標高で精度を維持する。このようにして、システムは、ある標高で較正可能であり(例えば、製造業者によって)、異なる標高で別の場所(例えば、顧客)に出荷されたときに較正が維持される。システムはまた、天候による局所的な気圧の変化を補償する。絶対気圧の補償は、フローモニタリングアルゴリズムの以下の部分によって対処される。
DPItarget=DPCcorrected*(BPIcorrected/BPCcorrected) (13)
【0080】
[0085]システムは、局所的な気圧の変化および高度の変化を補償する。システムは、差圧(DP)の19%降下をモニタリングすることによって、真空損失によって誘導された10%流量損失を検出する。システムは、(AP)と(BP)との間の差圧の10%降下をモニタリングすることによって、入口制約によって誘導される10%流量損失を検出する。このようにして、低コストのDP(120)、AP(124)およびBP(122)センサは、10%程に低い流量損失を確実に検出するために使用されてもよい。これらの圧力センサの各々は、低コストで購入できるため、結果的に得られる粒子センサは低コストを維持しながらも、粒子センサのコストを実質的に増加することなくインテリジェントフローモニタリングを提供する。
【0081】
[0086]図3は、粒子センサ106と、粒子センサ106内に空気を引き込む真空源300を含む関連付けられた空気流の仕組みのさらなる詳細を示す。また、図3は、体積流量をモニタリングするために粒子センサ106によって使用されるセンサ120、122、124の配置を示す。特に、センサ120、122および124からの出力(本明細書において提供されるような出力およびその後のアルゴリズム処理など)は、流動状態がユーザに提供されるモニタ500に向けられる。真空源300が、下流チューブ146と流通状態にするために接続された入口オリフィス130と、空気101Aの流れ138内の微粒子を評価するための粒子カウンタ132(例えば、光学ブロック200)とを通して、粒子センサ106内に空気101Aを引き込む。粒子センサ106は、流れ138を作るために、空気流チューブ20を含むことが好ましい。当技術分野において知られているように、流れ138の粒子を表す散乱エネルギー140が、検出器142によって検出されるように、レーザ134が、流れ138を照明するレーザビーム136を発生させる。粒子検知電子装置144が、選択された目標体積流量、例えば、1CFMに対してこれらの粒子を定量化するために、検出器142から信号ライン145を通る信号を評価する。
【0082】
[0087]真空源300は、カウンタ132から接続チューブ146と、空気流と、内部大気センサ120、122とを通して空気101A’をさらに引き込む。空気流センサ120は、図4と関連して記載された制約(例えば、流れ測定オリフィス400)にわたって空気101A’の空気流を測定し、内部大気センサ(例えば、基準圧力センサ)122は、センサ106内の圧力を測定する。一態様において、センサ122は、光学ブロック200(カウンタ132に対応)の圧力を測定する。真空源300が、接続チューブ148を通して排気口に空気101A’を流す。
【0083】
[0088]大気圧センサ124は、センサ106に流入する周囲空気101の絶対圧を提供する。センサ120、122、124からの出力は、表1にまとめられているように、パラメータを算出することで流量をモニタリングするために使用される。
【0084】
[0089]図4は、センサ106内の体積流量をモニタリングするためのセンサ106内の圧力検知の原理を示す。サンプルチューブ146の空気101A’の流量(分子/秒)または体積流量(空気量/秒)は、制約オリフィス400の両端の差圧センサ120によって算出される。圧力センサ122は、センサ106内の空気の密度(例えば、圧力)を測定する。所望の体積流量で粒子数を得るために、体積流量は、差圧センサ120および圧力センサ122のそれぞれによって与えられる流量ならびに大気圧によって決定される。圧力センサ122は、センサ106内のどの場所でも設けられうる(例えば、光学ブロック200など)。米国特許第6167107号明細書に、システムのさらなる詳細が与えられる。
【0085】
[0090]本出願中のすべての参考文献、例えば、特許証が発行された特許もしくは特許権が付与された特許を含む特許文献または均等物、特許出願公報、および、非特許文献または他の出典資料の内容全体は、各参照が本出願における開示と矛盾しない範囲で、参照により個々に組み込まれているかのように参照により援用されたものとする(例えば、部分的に矛盾する参考文献は、参考文献のうち部分的に矛盾した部分を除き、参照により援用されたもとする)。
【0086】
[0091]本明細書において用いた用語および表現は、限定的なものではなく、説明のためのものとして使用されており、このような用語および表現の使用において、図示、かつ説明された特徴またはそれらの一部のいかなる均等物も排除することを意図していないが、本発明の特許請求の範囲内で種々の修正が可能であることを認識されたい。したがって、好ましい実施形態、例示的な実施形態および任意選択の特徴によって本発明を詳細に開示してきたが、本明細書において開示された概念の修正および変形は、当業者によって行われてもよく、このような修正および変形は、添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることを理解されたい。当業者であれば、本明細書で提供された特定の実施形態は、本発明の有用な実施形態の例であり、本発明は、本明細書に示すデバイス、デバイスコンポーネント、方法ステップの多数の変形を使用して実行されてもよいことが明らかであろう。当業者には明らかなように、本発明の方法に有用な方法およびデバイスは、多数の任意選択の組成、ならびに処理要素および処理ステップを含みうる。
【0087】
[0092]置換基群が本明細書において開示されている場合、その置換基群のすべての個々の要素およびすべての亜群が別々に開示されることを理解されたい。本明細書においてマーカッシュ形式の群または他の群が使用される場合、群のすべての個々の要素、ならびに群の可能なすべての組み合わせおよび一部組み合わせが本開示に個別に含まれるものと意図される。
【0088】
[0093]本明細書に記載もしくは例示された成分のあらゆる調合物または組み合わせは、特に明記されない限り、本発明を実施するために使用されうる。
【0089】
[0094]範囲、例えば、温度範囲、サイズもしくは距離範囲、時間範囲、速度、電圧、圧力もしくは圧力比率、組成または濃度範囲が本発明細書に与えられている場合はいつでも、すべての中間範囲および部分範囲、ならびに所与の範囲に含まれるすべての個々の値は、本開示に含まれることが意図されたものである。本明細書に含まれている範囲または部分範囲の任意の部分範囲または個々の値は、本明細書の特許請求の範囲から除外できることを理解されたい。
【0090】
[0095]明細書で述べられたすべての特許および刊行物は、本発明が関係する当業者の技術レベルを示している。本明細書に引用された参考文献の内容全体は、それらの刊行日または出願日の時点での最新技術を示すために、本明細書に参照により援用され、この情報は、必要に応じて、先行技術である特定の実施形態を除外するために本明細書において用いられうる。例えば、物質組成が請求される場合、本出願人の発明に先立って当技術分野において既知で利用可能な化合物は、本明細書で引用された参考文献に使用可能な開示が提供されている化合物を含み、本明細書の物質組成の特許請求の範囲に含まれることを意図したものではないことを理解されたい。
【0091】
[0096]本明細書において使用される場合、「備える(comprising)」は、「含む(including)」、「含む(containing)」、または「を特徴とする(characterized by)」と同義であり、包括的(inclusive)または非限定的(open−ended)であり、追加要素、記載されていない要素または方法ステップを排除しない。本明細書において使用される場合、「からなる(consisting of)」は、請求項の要素に指定されていない任意の要素、ステップまたは成分も排除する。本明細書において使用される場合、「本質的に〜からなる(consisting essentially of)」は、請求項の基本的および新規な特徴に実質的に影響を与えない材料またはステップを排除しない。本明細書の各例において、「備える(comprising)」、「本質的に〜からなる(consisting essentially of)」および「からなる(consisting of)」という用語のいずれも他の2つの用語のいずかに置き換えてもよい。本明細書において例示的に記載した本発明は、本明細書において詳細には開示されていない1つまたは複数の任意の要素、1つまたは複数の限定がない状態でも適切に実施されてもよい。
【0092】
[0097]任意のこのような材料および方法の、当技術分野において既知のすべての機能的均等物は、本発明に含まれることが意図される。用いた用語および表現は、限定的なものはなく、説明するものとして使用され、このような用語および表現の使用において図示および説明された特徴またはそれらの一部のいかなる均等物も排除することを意図していないが、請求された本発明の特許請求の範囲内でさまざまな修正が可能であることを認識されたい。したがって、本発明は、好ましい実施形態によって詳細に開示されたが、本明細書において開示された概念の任意選択の特徴、修正および変形は、当業者によって行われてもよく、このような修正および変形は、添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることを理解されたい。
【0093】
【表1】
【特許請求の範囲】
【請求項1】
粒子センサにおけるガスの流量をモニタリングする方法であって、
粒子センサを用意するステップであり、前記粒子センサが、
流れ測定オリフィスで、該流れ測定オリフィスの両端の差圧を測定するための差圧センサを備える、流れ測定オリフィスと、
臨界オリフィスと、
前記流れ測定オリフィスおよび前記臨界オリフィスの両端にガス流を発生させるための真空システムと
を備えるものである、ステップと、
前記臨界オリフィスの下流の位置での圧力を真空圧力とすることによって、前記粒子センサを通るガス流を発生するステップと、
前記流れ測定オリフィスの両端の圧力降下(DPI)の値を決定するステップと、
大気圧(API)の値を決定するステップと、
前記臨界オリフィスの上流の位置で、前記粒子センサの圧力(BPI)の値を決定するステップと、
前記DPI値、前記API値および前記BPI値から流動状態を特定するステップと
を備え、もって前記粒子カウンタにおいて前記流量をモニタリングする方法。
【請求項2】
前記流動状態が、
許容範囲の流量と、
流量誤差状態と
からなる群から選択される、請求項1に記載の方法。
【請求項3】
前記流動状態が流量誤差状態である、請求項1に記載の方法。
【請求項4】
真空誘導された流量損失または入口誘導された流量損失として前記流量誤差状態を特定するステップをさらに備える、請求項3に記載の方法。
【請求項5】
前記真空誘導された流量損失が、
DPIcorr<(1−TOLERANCE)2*DPItarget、または
DPIcorr>(1+TOLERANCE)2*DPItarget
によって特定され、式中、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値である、請求項4に記載の方法。
【請求項6】
TOLERANCE値が、5%以上、かつ、15%以下の範囲から選択される、請求項5に記載の方法。
【請求項7】
TOLERANCE値が10%である、請求項6に記載の方法。
【請求項8】
前記入口誘導された流量損失が、
APRinsitu<(1−TOLERANCE)*APRcalibration、または、
APRinsitu>(1+TOLERANCE)*APRcalibration
により特定され、式中、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
BPCcorrが、較正時の基準圧力値であり、
APCcorrが、較正時の大気圧である、請求項4に記載の方法。
【請求項9】
TOLERANCE値が、5%以上、かつ、15%以下の範囲から選択される、請求項8に記載の方法。
【請求項10】
TOLERANCE値が10%である、請求項9に記載の方法。
【請求項11】
BPI値が、前記粒子センサの光学ブロック内で測定される、請求項1に記載の方法。
【請求項12】
前記流れ測定オリフィスが、前記臨界オリフィスの上流に配置される、請求項1に記載の方法。
【請求項13】
前記真空源がハウス真空である、請求項1に記載の方法。
【請求項14】
前記ガスが空気である、請求項1に記載の方法。
【請求項15】
目標流量から10%以上外れた流動状態を特定するステップをさらに備える、請求項1に記載の方法。
【請求項16】
前記目標流量が1CFMである、請求項15に記載の方法。
【請求項17】
前記流動状態の逸脱の原因を特定するステップをさらに備え、
前記原因が、真空誘導された損失または入口誘導された流量損失である、請求項15に記載の方法。
【請求項18】
粒子センサにおいてガスの体積流量をモニタリングする方法であって、
粒子センサを用意するステップであり、前記粒子センサが
流れ測定オリフィスの両端の差圧を測定するための差圧センサを備える前記流れ測定オリフィスと、
臨界オリフィスと、
前記流れ測定オリフィスおよび前記臨界オリフィスの両端にガス流を発生させるための真空システムと
を備えるものである、ステップと、
前記臨界オリフィスの下流の位置での圧力を真空圧力とすることによって、前記粒子センサを通るガス流を発生させるステップと、
前記流れ測定オリフィスの両端の圧力降下(DPI)の値を決定するステップと、
大気圧(API)の値を決定するステップと、
前記臨界オリフィスの上流の位置で、前記粒子センサの圧力(BPI)の値を決定するステップと、
前記DPI値、前記API値および前記BPI値から流動状態を特定するステップと
を備え、
前記流動状態が、
DPIcorr<(1−TOLERANCE)2*DPItarget、もしくは
DPIcorr>(1+TOLERANCE)2*DPItarget
の場合、真空誘導された流量損失として特定され、式中、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcorr)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値であり、
または、
APRinsitu<(1−TOLERANCE)*APRcalibration、もしくは、
APRinsitu>(1+TOLERANCE)*APRcalibration
の場合、入口誘導された流量損失として特定され、式中、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
BPCcorrが、較正時の基準圧力値であり、
APCcorrが、較正時の大気圧であり、もって、粒子カウンタにおいて体積流量をモニタリングする、方法。
【請求項19】
粒子センサであって、
粒子カウンタと、
当該粒子センサの動作中、流れ測定オリフィスの両端の差圧(DPI)を測定するための差圧センサを備える前記流れ測定オリフィスと、
臨界流オリフィスと、
前記粒子カウンタ、前記流れ測定オリフィスおよび前記臨界流オリフィスの各々を通して周囲ガスを吸引するための真空源と、
大気圧(API)の値を決定するための大気圧センサと、
前記粒子センサの圧力(BPI)の値を決定するための基準圧力センサと、
前記差圧センサ、前記大気圧センサおよび前記基準圧力センサの各々に操作可能に接続され、前記DPI値、前記API値および前記BPI値から流動状態を特定するモニタと、
を備える粒子センサ。
【請求項20】
前記モニタが、前記流動状態が流量誤差であるときを示すアラームである、請求項19に記載の粒子センサ。
【請求項21】
前記流量誤差が、前記粒子センサを通るガスの目標流量からの逸脱が10%以上である、請求項20に記載の粒子センサ。
【請求項22】
前記流量誤差が、
DPIcorr<(1−TOLERANCE)2*DPItarget、
DPIcorr>(1+TOLERANCE)2*DPItarget、
APRinsitu<(1−TOLERANCE)*APRcalibration、および
APRinsitu>(1+TOLERANCE)*APRcalibration
によって規定される1つまたは複数の条件を満たし、式中、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値であり、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
APCcorrが、較正時の大気圧である、請求項20に記載の粒子センサ。
【請求項23】
前記流動状態が、目標流量からの逸脱が10%以下の流量である許容範囲の流動状態である、請求項19に記載の粒子センサ。
【請求項24】
前記流れ測定オリフィスが、前記粒子カウンタと前記臨界流オリフィスとの間に配置される、請求項19に記載の粒子センサ。
【請求項25】
前記基準圧力センサが、前記粒子カウンタの光学ブロック内の圧力を測定する、請求項19に記載の粒子センサ。
【請求項26】
粒子センサであって、
粒子カウンタと、
当該粒子センサの動作中、流れ測定オリフィスの両端の差圧(DPI)を測定するための差圧センサを備える前記流れ測定オリフィスと、
臨界流オリフィスと、
前記粒子カウンタ、前記流れ測定オリフィスおよび前記臨界流オリフィスの各々を通る周囲ガスを吸引するための真空源と、
大気圧(API)の値を測定するための大気圧センサと、
前記粒子センサの圧力(BPI)の値を測定するための基準圧力センサと、
前記差圧センサ、前記大気圧センサおよび前記基準圧力センサの各々に操作可能に接続され、前記DPI値、前記API値および前記BPI値から流動状態を特定するモニタと、
を備え、前記流動状態が、
DPIcorr<(1−TOLERANCE)2*DPItarget、
DPIcorr>(1+TOLERANCE)2*DPItarget、
APRinsitu<(1−TOLERANCE)*APRcalibration、および
APRinsitu>(1+TOLERANCE)*APRcalibration
の1つまたは複数を満たす流量誤差であり、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値であり、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
APCcorrが、較正時の大気圧である、粒子センサ。
【請求項1】
粒子センサにおけるガスの流量をモニタリングする方法であって、
粒子センサを用意するステップであり、前記粒子センサが、
流れ測定オリフィスで、該流れ測定オリフィスの両端の差圧を測定するための差圧センサを備える、流れ測定オリフィスと、
臨界オリフィスと、
前記流れ測定オリフィスおよび前記臨界オリフィスの両端にガス流を発生させるための真空システムと
を備えるものである、ステップと、
前記臨界オリフィスの下流の位置での圧力を真空圧力とすることによって、前記粒子センサを通るガス流を発生するステップと、
前記流れ測定オリフィスの両端の圧力降下(DPI)の値を決定するステップと、
大気圧(API)の値を決定するステップと、
前記臨界オリフィスの上流の位置で、前記粒子センサの圧力(BPI)の値を決定するステップと、
前記DPI値、前記API値および前記BPI値から流動状態を特定するステップと
を備え、もって前記粒子カウンタにおいて前記流量をモニタリングする方法。
【請求項2】
前記流動状態が、
許容範囲の流量と、
流量誤差状態と
からなる群から選択される、請求項1に記載の方法。
【請求項3】
前記流動状態が流量誤差状態である、請求項1に記載の方法。
【請求項4】
真空誘導された流量損失または入口誘導された流量損失として前記流量誤差状態を特定するステップをさらに備える、請求項3に記載の方法。
【請求項5】
前記真空誘導された流量損失が、
DPIcorr<(1−TOLERANCE)2*DPItarget、または
DPIcorr>(1+TOLERANCE)2*DPItarget
によって特定され、式中、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値である、請求項4に記載の方法。
【請求項6】
TOLERANCE値が、5%以上、かつ、15%以下の範囲から選択される、請求項5に記載の方法。
【請求項7】
TOLERANCE値が10%である、請求項6に記載の方法。
【請求項8】
前記入口誘導された流量損失が、
APRinsitu<(1−TOLERANCE)*APRcalibration、または、
APRinsitu>(1+TOLERANCE)*APRcalibration
により特定され、式中、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
BPCcorrが、較正時の基準圧力値であり、
APCcorrが、較正時の大気圧である、請求項4に記載の方法。
【請求項9】
TOLERANCE値が、5%以上、かつ、15%以下の範囲から選択される、請求項8に記載の方法。
【請求項10】
TOLERANCE値が10%である、請求項9に記載の方法。
【請求項11】
BPI値が、前記粒子センサの光学ブロック内で測定される、請求項1に記載の方法。
【請求項12】
前記流れ測定オリフィスが、前記臨界オリフィスの上流に配置される、請求項1に記載の方法。
【請求項13】
前記真空源がハウス真空である、請求項1に記載の方法。
【請求項14】
前記ガスが空気である、請求項1に記載の方法。
【請求項15】
目標流量から10%以上外れた流動状態を特定するステップをさらに備える、請求項1に記載の方法。
【請求項16】
前記目標流量が1CFMである、請求項15に記載の方法。
【請求項17】
前記流動状態の逸脱の原因を特定するステップをさらに備え、
前記原因が、真空誘導された損失または入口誘導された流量損失である、請求項15に記載の方法。
【請求項18】
粒子センサにおいてガスの体積流量をモニタリングする方法であって、
粒子センサを用意するステップであり、前記粒子センサが
流れ測定オリフィスの両端の差圧を測定するための差圧センサを備える前記流れ測定オリフィスと、
臨界オリフィスと、
前記流れ測定オリフィスおよび前記臨界オリフィスの両端にガス流を発生させるための真空システムと
を備えるものである、ステップと、
前記臨界オリフィスの下流の位置での圧力を真空圧力とすることによって、前記粒子センサを通るガス流を発生させるステップと、
前記流れ測定オリフィスの両端の圧力降下(DPI)の値を決定するステップと、
大気圧(API)の値を決定するステップと、
前記臨界オリフィスの上流の位置で、前記粒子センサの圧力(BPI)の値を決定するステップと、
前記DPI値、前記API値および前記BPI値から流動状態を特定するステップと
を備え、
前記流動状態が、
DPIcorr<(1−TOLERANCE)2*DPItarget、もしくは
DPIcorr>(1+TOLERANCE)2*DPItarget
の場合、真空誘導された流量損失として特定され、式中、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcorr)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値であり、
または、
APRinsitu<(1−TOLERANCE)*APRcalibration、もしくは、
APRinsitu>(1+TOLERANCE)*APRcalibration
の場合、入口誘導された流量損失として特定され、式中、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
BPCcorrが、較正時の基準圧力値であり、
APCcorrが、較正時の大気圧であり、もって、粒子カウンタにおいて体積流量をモニタリングする、方法。
【請求項19】
粒子センサであって、
粒子カウンタと、
当該粒子センサの動作中、流れ測定オリフィスの両端の差圧(DPI)を測定するための差圧センサを備える前記流れ測定オリフィスと、
臨界流オリフィスと、
前記粒子カウンタ、前記流れ測定オリフィスおよび前記臨界流オリフィスの各々を通して周囲ガスを吸引するための真空源と、
大気圧(API)の値を決定するための大気圧センサと、
前記粒子センサの圧力(BPI)の値を決定するための基準圧力センサと、
前記差圧センサ、前記大気圧センサおよび前記基準圧力センサの各々に操作可能に接続され、前記DPI値、前記API値および前記BPI値から流動状態を特定するモニタと、
を備える粒子センサ。
【請求項20】
前記モニタが、前記流動状態が流量誤差であるときを示すアラームである、請求項19に記載の粒子センサ。
【請求項21】
前記流量誤差が、前記粒子センサを通るガスの目標流量からの逸脱が10%以上である、請求項20に記載の粒子センサ。
【請求項22】
前記流量誤差が、
DPIcorr<(1−TOLERANCE)2*DPItarget、
DPIcorr>(1+TOLERANCE)2*DPItarget、
APRinsitu<(1−TOLERANCE)*APRcalibration、および
APRinsitu>(1+TOLERANCE)*APRcalibration
によって規定される1つまたは複数の条件を満たし、式中、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値であり、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
APCcorrが、較正時の大気圧である、請求項20に記載の粒子センサ。
【請求項23】
前記流動状態が、目標流量からの逸脱が10%以下の流量である許容範囲の流動状態である、請求項19に記載の粒子センサ。
【請求項24】
前記流れ測定オリフィスが、前記粒子カウンタと前記臨界流オリフィスとの間に配置される、請求項19に記載の粒子センサ。
【請求項25】
前記基準圧力センサが、前記粒子カウンタの光学ブロック内の圧力を測定する、請求項19に記載の粒子センサ。
【請求項26】
粒子センサであって、
粒子カウンタと、
当該粒子センサの動作中、流れ測定オリフィスの両端の差圧(DPI)を測定するための差圧センサを備える前記流れ測定オリフィスと、
臨界流オリフィスと、
前記粒子カウンタ、前記流れ測定オリフィスおよび前記臨界流オリフィスの各々を通る周囲ガスを吸引するための真空源と、
大気圧(API)の値を測定するための大気圧センサと、
前記粒子センサの圧力(BPI)の値を測定するための基準圧力センサと、
前記差圧センサ、前記大気圧センサおよび前記基準圧力センサの各々に操作可能に接続され、前記DPI値、前記API値および前記BPI値から流動状態を特定するモニタと、
を備え、前記流動状態が、
DPIcorr<(1−TOLERANCE)2*DPItarget、
DPIcorr>(1+TOLERANCE)2*DPItarget、
APRinsitu<(1−TOLERANCE)*APRcalibration、および
APRinsitu>(1+TOLERANCE)*APRcalibration
の1つまたは複数を満たす流量誤差であり、
DPIcorrが、粒子センサ動作中の前記流れ測定オリフィスの両端にかかる差圧センサ現在値であり、
TOLERANCEが、ユーザ選択の流量許容レベルであり、
DPItargetが、DPCcorr*(BPIcorr/BPCcor)として算出される差圧センサ目標値であり、ここで、
DPCcorrが、システム較正中の差圧センサ値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
BPCcorrが、システム較正中の基準圧力値であり、
APRinsituが、粒子センサ動作中のAPIcorrおよびBPIcorrの圧力比(BPIcorr/APIcorr)であり、ここで、
APIcorrが、粒子センサ動作中の大気圧値であり、
BPIcorrが、粒子センサ動作中の基準圧力値であり、
APRcalibrationが、APCcorrおよびBPCcorrの圧力比(BPCcorr/APCcorr)であり、ここで、
APCcorrが、較正時の大気圧である、粒子センサ。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2013−502596(P2013−502596A)
【公表日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2012−526897(P2012−526897)
【出願日】平成22年8月24日(2010.8.24)
【国際出願番号】PCT/US2010/046438
【国際公開番号】WO2011/025763
【国際公開日】平成23年3月3日(2011.3.3)
【出願人】(506061299)パーティクル・メージャーリング・システムズ・インコーポレーテッド (8)
【Fターム(参考)】
【公表日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成22年8月24日(2010.8.24)
【国際出願番号】PCT/US2010/046438
【国際公開番号】WO2011/025763
【国際公開日】平成23年3月3日(2011.3.3)
【出願人】(506061299)パーティクル・メージャーリング・システムズ・インコーポレーテッド (8)
【Fターム(参考)】
[ Back to top ]