
流量センサの異常検出方法および脱気装置
【課題】液処理装置において、流量センサの異常を簡易に検出する。
【解決手段】処理槽2,給液用の第一ポンプ20,排液用の第二ポンプ26,液の供給流量を検知する流量センサ22,液位センサ16Aを備え、液位センサ16Aからの信号に基づいて設定液位に制御する水処理装置における流量センサの異常検出方法であって、流量検知信号の設定値以下が判定されると第二ポンプ26の作動を停止し、設定時間内に液位検知信号に所定の増加が有る場合に流量センサ22が異常と判定する。
【解決手段】処理槽2,給液用の第一ポンプ20,排液用の第二ポンプ26,液の供給流量を検知する流量センサ22,液位センサ16Aを備え、液位センサ16Aからの信号に基づいて設定液位に制御する水処理装置における流量センサの異常検出方法であって、流量検知信号の設定値以下が判定されると第二ポンプ26の作動を停止し、設定時間内に液位検知信号に所定の増加が有る場合に流量センサ22が異常と判定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、液体中の溶存気体を脱気する真空式の脱気装置などの液処理装置に適用される流量センサの異常検出方法および脱気装置に関する。
【背景技術】
【0002】
被処理液中の溶存気体,たとえば溶存酸素を低減させる真空式の脱気装置は、給水,洗浄,あるいは食品加工などの用途に広く利用されている。給水用途における例を挙げると、蒸気ボイラや排ガスボイラなどの熱機器は、給水中の溶存酸素によって伝熱管で腐食を生じ、短期間で破損に至る場合がある。また、ビルやマンションなどの建造物は、給水中の溶存酸素によって給水配管で腐食を生じ、赤水が発生する場合がある。このため、前記熱機器や前記建造物では、給水系統に前記脱気装置を設置し、給水中の溶存酸素を低減することが行われている。
【0003】
前記脱気装置は、特許文献1に開示されているように、まず被処理液を加圧ポンプによって処理槽の上部に設けられたノズルへ供給し、被処理液を前記処理槽内の上部から下部へ向かって噴出する。そして、前記処理槽内を真空吸引することにより、噴出された液滴から溶存気体を脱気したのち、処理液として貯留し、この処理液を送液ポンプによって前記処理槽内から排出する構成の装置である。
【0004】
【特許文献1】特開平8−108005号公報
【0005】
ところで、前記脱気装置では、効率のよい脱気を行うため、前記ノズルからの噴出流量と前記処理槽内の液位とを所定範囲に維持することが重要である。前記ノズルからの噴出流量は、被処理液の液滴の大きさに影響し、噴出流量が少なくなるほど液滴が大きくなり、脱気効率が低下する。一方、前記処理槽内の液位は、被処理液の脱気時間に影響し、液位が高くなるほど脱気時間が短くなり、脱気効率が低下する。そこで、前記脱気装置では、前記ノズルからの液滴の大きさが一定となるように、被処理液の供給流量を予め設定された基準処理流量に調整し、また前記処理槽内の液位が一定となるように、処理液の排出流量を前記基準処理流量に調整し、所定の脱気効率を維持している。
【0006】
被処理液の供給流量の調整は、通常、前記加圧ポンプの下流側に設けた流量センサおよび手動バルブを使用して行われる。具体的には、前記加圧ポンプは、被処理液の粘性や前記ノズルでの圧力損失などを考慮して、前記基準処理流量よりも過剰の供給流量となるように、事前に運転圧力が高く設定される。そして、試運転やメンテナンスなどの際に、前記流量センサで供給流量を計測し、この計測値が前記基準処理流量と一致するように、前記手動バルブの開度を絞っている。
【0007】
一方、処理液の排出流量の調整は、被処理液の供給流量の調整と同様、通常、前記送液ポンプの下流側に設けた流量センサおよび手動バルブを使用して行われる。具体的には、前記送液ポンプは、処理液の粘性や前記処理槽内の真空度などを考慮して、前記基準処理流量よりも過剰の排出流量となるように、事前に運転圧力が高く設定される。そして、試運転やメンテナンスなどの際に、前記流量センサで排出流量を計測し、この計測値が前記基準処理流量と一致するように、前記手動バルブの開度を絞っている。
【0008】
このように、従来の前記脱気装置では、被処理液の供給流量と処理液の排出流量とを手動で調整する構成となっているため、その作業が極めて煩雑であり、性能維持が容易でない。また、前記脱気装置では、前記両ポンプの運転圧力を高く設定し,かつ流量を絞る構
成となっているため、前記両ポンプの消費電力が大きく、ランニングコストの増加を招いている。
【0009】
この発明の出願人は、前記の事情に鑑み、被処理液の供給流量の調整作業を容易化するとともに、供給側のポンプの消費電力を低減するとともに、被処理液の供給流量および処理液の排出流量の調整作業を容易化し、供給側および排出側の両ポンプの消費電力を同時に低減することが可能な脱気装置を特願2006−86837にて出願した。この脱気装置は、処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、前記ノズルへ被処理液を供給する第一ポンプと、前記処理槽内から処理液を排出する第二ポンプと、被処理液の供給流量を検知する第一流量センサと、前記処理槽内の液位を検知する液位センサと、前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、前記第二ポンプの回転数を出力周波数に応じて制御する第二インバータと、前記第一流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備えることを特徴とする。
【発明の開示】
【発明が解決しようとする課題】
【0010】
この発明が解決しようとする課題は、出願済の特願2006−86837の脱気装置などの液処理装置において、流量センサの異常を簡易に検出することである。
【課題を解決するための手段】
【0011】
この発明は、前記課題を解決するためになされたもので、請求項1に記載の発明は、被処理液を貯留する処理槽と、この処理槽へ被処理液を供給するポンプと、前記処理槽から処理液を排出する排液手段と、被処理液の供給流量を検知する流量センサと、前記処理槽内の液位を検知する液位センサとを備え、前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する液処理装置における流量センサの異常検出方法であって、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴としている。
【0012】
請求項1に記載の発明によれば、前記液位センサによる液位信号の変化に基づき、前記流量センサの異常を検出することができ、圧力検出器などのセンサを別個に設けることなく、簡易に流量センサの異常を検出することができる。
【0013】
請求項2に記載の発明は、処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、前記ノズルへ被処理液を供給する第一ポンプと、被処理液の供給流量を検知する流量センサと、前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、前記処理槽内から処理液を排出する第二ポンプと、前記処理槽内の液位を検知する液位センサと、前記第二ポンプの回転数を出力周波数に応じて制御する第二インバータと、前記流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備え、前記制御部は、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプの作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴としている。
【0014】
請求項2に記載の発明によれば、前記液位センサによる液位信号の変化に基づき、前記流量センサの異常を検出することができ、圧力検出器などのセンサを別個に設けることなく、簡易に流量センサの異常を検出することができる。
【0015】
請求項3に記載の発明は、請求項2において、前記制御部は、前記第三ステップにて異常が判定されると、前記流量センサが異常と判定される直前の所定時間における平均した運転周波数により前記第一ポンプを制御することを特徴としている。
【0016】
請求項3に記載の発明によれば、請求項2に記載の発明による効果に加えて、前記流量センサの異常にも拘わらず、前記流量センサの正常時に近い状態で脱気装置の運転を継続することができるという効果を奏する。
【発明の効果】
【0017】
この発明によれば、圧力検出器などのセンサを別個に設けることなく、簡易に流量センサの異常を検出することができる。
【発明を実施するための最良の形態】
【0018】
つぎに、この発明の実施の形態について説明する。この発明の実施の形態の流量センサの異常検出方法は、タワー型脱気装置などの液処理装置に好適に実施される。
【0019】
(実施の形態1)
この実施の形態1を具体的に説明する。この実施の形態1は、被処理液を貯留する処理槽と、この処理槽へ被処理液を供給するポンプと、前記処理槽から処理液を排出する排液手段と、被処理液の供給流量を検知する流量センサと、前記処理槽内の液位を検知する液位センサとを備え、前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する液処理装置における流量センサの異常検出方法であって、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする流量センサの異常検出方法である。
【0020】
この発明の実施の形態1においては、通常液位制御を行いながら前記流量センサの異常検出が行われる。前記通常液位制御は、少なくとも前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する液位制御を含み、この液位制御に加えて前記流量センサの流量検知信号に基づいて前記ポンプの回転数を制御する液供給量制御を含ませることができる。前記設定液位制御は、前記排液手段および/または前記ポンプを用いて行う,すなわち前記排液手段および前記ポンプのいずれか一方または両方を用いて行うことができる。
【0021】
前記流量センサの異常検出は、つぎのようにして行われる。まず、前記第一ステップにおいて、前記流量センサの流量検知信号が設定値以下かどうかを判定する。前記流量検知信号の設定値は、零を越える設定値とするが、零とすることもができる。
【0022】
ついで、前記第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する。このステップにおいて、必要に応じて、前記排液手段の作動停止前に、前記排液手段の作動により前記処理槽内の液位を低下させる制御を付加する。この液位低下制御は、前記第三ステップ終了後に必要以上に液位が上昇しないようにするための制御である。
【0023】
前記第二ステップに続く第三ステップでは、前記ポンプが作動されており、前記第二ス
テップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有るかどうかを監視し、所定の増加が有る場合に前記流量センサが異常と判定する。前記所定の増加は、好ましくは、液位検知信号の増加速度が設定値以上とする。前記所定の増加があるかどうかの監視中もS2と同じ判定が行われ、流量が設定値以下でないと設定時間だけ判定されると、前記流量センサの異常とは判定しない。
【0024】
このように、異常判定条件を液位検知信号の増加速度が設定値以上とすることにより、前記処理槽からの給液系の異常と流量センサ異常とを判別することができる。
【0025】
ここで、この発明の実施の形態1を構成する構成要素を説明する。前記処理槽は、被処理液に何らかの処理が行われるものであればよく、特定の構造に限定されない。この処理槽は、この実施の形態1が適用される装置がタワー型脱気装置であれば、脱気を行う処理槽である。
【0026】
前記ポンプは、前記流量センサの流量検知信号に基づいて前記ポンプの回転数を制御する液供給量制御を含む場合は、回転数制御可能なポンプとし、好ましくは、インバータにより回転数を制御するものとする。このポンプは、ON−OFF式のものでも良い。
【0027】
前記排液手段は、前記処理槽から液体を排出する手段であり、好ましくは、ポンプとするが、弁の開閉により排液制御が可能であれば、開閉弁とすることができる。ここで、「排液」とは、液体状態で排出することを意味するだけでなく、蒸気ボイラの缶体のように、気体状態で排出することをも意味する。
【0028】
前記流量センサは、前記処理槽へ供給する液量を検出できるものであれば、特定の流量センサに限定されない。前記流量センサは、流量計と称することができる。また、前記流量センサの検出信号は、前記ポンプの回転数を制御するために用いるものに限定されず、例えば、単なる流量の検出、報知のみに用いることができる。
【0029】
前記液位センサは、好ましくは、伝送出力式液位センサ(アナログ出力式液位センサと称することができる。)とするが、接点出力式液位センサとすることができる。前記伝送出力式液位センサは、前記処理槽内の液体が導電性か非導電性かにより、また前記処理槽の容器の材質が金属かどうかで、構成を異にするが、この実施の形態1においては、どのような構成の伝送出力式液位センサでも適用可能である。また、伝送出力式液位検出手段は、好ましくは、静電容量式レベルセンサとするが、これに限定されないものであり、水頭圧を検知して液位を測定する圧力センサや、フロート式の水位センサ、超音波式の水位センサなどとすることができる。
【0030】
前記接点出力式液位検出手段は、前記処理槽内の特定液位における出力状態の変化に基づいて、前記特定液位を検出するレベルセンサであり、好ましくは、特定液位を検出する電極式レベルスイッチとするが、フロート式レベルセンサとすることができる。
【0031】
この発明の実施の形態1は、典型的には、つぎの実施の形態2の脱気装置に適用される。
【0032】
(実施の形態2)
この実施の形態2は、処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、前記ノズルへ被処理液を供給する第一ポンプと、被処理液の供給流量を検知する流量センサと、前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、前記処理槽内から処理液を排出する第二ポンプと、前記処理槽内の液位を検知する液位センサと、前記第二ポンプの回転数を出力周波数に応じて制御
する第二インバータと、前記流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備え、前記制御部は、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプを運転して前記処理槽内の液位を低下させた後、前記第二ポンプの作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする脱気装置である。
【0033】
この実施の形態2においては、つぎの通常液位制御が行われる。前記第一ポンプの運転は、前記第一インバータによって行われる。前記第一インバータへは、前記第一流量センサからの流量検知信号が前記制御部を介して指令信号としてフィードバックされる。そして、前記第一ポンプは、前記第一インバータの出力周波数に応じてその回転数が制御され、被処理液の供給流量が予め設定された基準処理流量と一致するように運転される。一方、前記第二ポンプの運転は、前記第二インバータによって行われる。前記第二インバータへは、前記液位センサからの液位検知信号が前記制御部を介して指令信号としてフィードバックされる。そして、前記第二ポンプは、前記第二インバータの出力周波数に応じてその回転数が制御され、前記処理槽内における処理液の液位が予め設定された基準液位と一致するように運転される。したがって、前記ノズルからの液滴の大きさが一定となるように、前記第一ポンプの運転圧力が自動的に調整されるとともに、前記処理槽内での脱気時間が一定となるように、前記第二ポンプの運転圧力が自動的に調整されることになり、所定の脱気効率を維持しながら、前記両ポンプの消費電力が同時に低減される。
【0034】
そして、前記実施の形態1と同様な、流量センサの異常検出制御が行われる。前記実施の形態1と異なるのは、前記第二ステップにおいて、前記第二ポンプの停止前に前記第二ポンプを作動(駆動)して、前記処理槽内の液位を低下させる制御を加えた点だけであり、その他は、同様であるのでその説明を省略する。
【0035】
つぎに、この実施の形態2の構成要素を説明する。この実施の形態2において、前記制御部以外は、前記実施の形態1と基本的に同様であるので、その説明を省略する。
【0036】
前記制御部は、制御手順の一部として、前記通常液位制御を実行する第一制御手順と、前記流量センサの異常検出を実行するとともに、異常判定時に前記第一ポンプのバックアップ制御を実行する第二制御手順とを記憶している。そして、これらの制御手順に加えて、前記第一ポンプのバックアップ制御に用いる運転周波数の平均値を求める第三制御手順を含ませることができる。この第三制御手順は、前記第二制御手順に含ませることができる。
【0037】
この第三制御手順は、好ましくは、前記流量センサによる検出流量が前記第一ポンプによる基準処理流量(目標流量と称することができる。)に対して一定の範囲内に入っているかどうかという第一条件と、前記流量センサによる流量検出信号が前記第一ポンプの制御に用いられているという第二条件と、前記第一ポンプの運転開始から設定時間(ポンプの運転が安定するための時間)経過後であるという第三条件とを同時に満たしているとき、所定時間毎に運転周波数をサンプリングする。そして、サンプリングされた所定個数を平均して平均運転周波数を求める。
【0038】
さらに、前記制御部の制御手順として、前記伝送出力式液位センサが正常かどうかを判定する第一異常判定プログラムを含ませることができる。そして、前記制御手順には、更に、前記伝送出力式液位センサの異常判定に用いる接点出力式液位センサが正常かどうかを判定する第二異常判定プログラムを含くませることができる。この実施の形態2におい
ては、好ましくは、これら第一異常判定プログラムにより前記伝送出力式液位センサが正常と判定され、かつ前記第二異常判定プログラムにより前記接点出力式液位センサが正常と判定されたとき、前記流量センサの異常検出の結果を正しいと判定する。
【0039】
前記第一異常判定プログラムは、特開2000−55712号公報に記載の方法とすることができるが、これに限定されない。また、前記第二異常判定プログラムは、特開2000−55712号公報や特公平4−8732号公報に記載の方法とすることができるが、これに限定されない。
【実施例1】
【0040】
(実施例1の構成)
以下、この発明の実施例1を図面に基づいて詳細に説明する。図1は、本実施例1に係る脱気装置の概略構成図を示し、図2は、本実施例1の要部制御手順を説明するフローチャート図であり、図3は、本実施例1の他の要部制御手順を説明するフローチャート図である。
【0041】
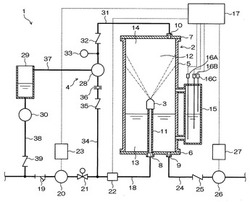
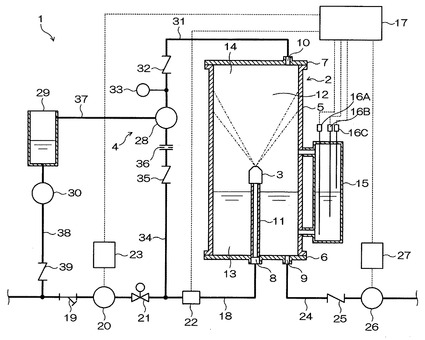
本実施例1に係る脱気装置は、たとえば蒸気ボイラや排ガスボイラ等の熱機器,あるいはビルやマンション等の建造物などの給水系統に設置され、伝熱管や給水配管の防食を目的として給水中の溶存酸素を低減する場合に適用される。図1において、脱気装置1は、処理槽2と、ノズル3と、真空吸引手段4とを主に備えている。
【0042】
前記処理槽2は、垂直に立設された筒状の胴部5を有しており、下端開口部を底板6で封鎖するとともに、上端開口部を天板7で封鎖することにより、一体化された密閉容器を構成している。ここにおいて、前記処理槽2は、耐圧性,耐熱性および耐食性を確保する観点から、通常、ステンレス鋼(たとえば、SUS304など)を使用して形成される。
【0043】
前記底板6には、被処理水の供給口8と処理水の排出口9とがそれぞれ設けられており、前記供給口8は、前記底板6の中央部,すなわち前記底板6のほぼ中心部に設けられている。一方、前記天板7には、排気口10が設けられており、この排気口10には、前記真空吸引手段4が接続されている。この真空吸引手段4の詳細については、後述する。
【0044】
前記処理槽2内において、前記供給口8には、上方へと延びる供給管11の一端側が液密に接続されており、この供給管11の他端側には、前記ノズル3が接続されている。すなわち、前記ノズル3は、前記処理槽2の軸方向の中央部に噴出方向が上向きになるように配設され、前記供給管11を介して供給された被処理水が前記天板7へ向かって噴出されるように構成されている。
【0045】
前記処理槽2内において、前記ノズル3の噴出口よりも上方の空間は、被処理水の脱気部12に設定されている。この脱気部12の高さは、前記ノズル3から被処理水が所定角度で噴出されたとき、噴出コーン裾部の水滴が前記胴部5の側壁まで到達可能な高さが確保されている。一方、前記ノズル3の噴出口よりも下方の空間は、処理水の貯留部13に設定されている。ここにおいて、前記処理槽2の上部には、脱気効率を高めるため、前記ノズル3からの噴出水と前記脱気部12から落下水とを衝突させ、被処理水の前記貯留部13への落下を遅延させる脱気促進部14が設けられていてもよい。この脱気促進部14の具体的な構成と作用については、本願出願人らによる特願2006−13552号に記載されている。
【0046】
前記胴部5の側方には、処理水の水位を検出する水位検出筒15が併設されており、この水位検出筒15の上部が前記脱気部12と連通されているとともに、前記水位検出筒15の下部が前記貯留部13と連通されている。前記水位検出筒15には、前記処理槽2内
の水位を検知する伝送出力式水位検出手段としての水位センサ16Aが挿入されており、この水位センサ16Aは、前記脱気装置1の運転を制御する制御部17と接続されている。
【0047】
前記水位センサ16Aは、減圧状態下で前記処理槽2内の水位を連続的に検知可能なものであって、この実施例1では、絶縁被覆した金属電極と金属製胴部5と間の静電容量の変化に基づき水位を検出する静電容量式のセンサとしている。
【0048】
また、前記水位検出筒15には、前記処理槽2内の水位を検知する接点出力式水位(水位)検出手段としての第一電極(以下、L電極という。)16B,第二電極(以下、H電極という。)16Cが挿入されており、これらの電極16B,16Cも、前記制御部17と接続されている。前記L電極16Bおよび前記H電極16Cは、補助電極,出力補正用電極またはバックアップ制御用電極と称することができる。
【0049】
ここにおいて、前記処理槽2には、下限水位(位置)LL(例えば、50mm)〜上限水位(位置)HH(例えば、250mm)の間の許容水位制御帯御帯が設定されている。この許容水位制御帯とは、この制御帯を越えて水位が制御されると実施例1の脱気装置において不都合が生ずる制御帯である。前記下限位置LLは、脱気水を連続的に供給可能とするために前記処理槽2内に最低限必要な下限水位であり、上限位置HHは、前記処理槽2ノズル3が水中に没しないように設定される上限水位である。
【0050】
前記水位センサ16Aは、前記許容水位制御帯の下限位置LLよりも低い水位から前記許容水位制御帯の上限位置HHよりも高い水位まで,連続して検出することが可能となるように構成されている。
【0051】
前記L電極16Bおよび前記H電極16Cは、前記許容水位制御帯の内側において、前記処理槽2内の水位の変化に基づいて、それぞれL位置,H位置を検出する。後述のように、前記処理槽2内の水位は設定水位(目標水位)に制御されるが、前記設定水位は、前記L位置とH位置の丁度中間に設定している。
【0052】
さて、前記供給口8には、被処理水供給ライン18が接続されており、この被処理水供給ライン18には、上流側から順にストレーナ19,第一ポンプ20,開閉弁21および第一流量センサ22が設けられている。前記第一ポンプ20は、前記ストレーナ19で懸濁物質が濾過された被処理水を前記ノズル3へ供給するためのものであって、第一インバータ23と接続され、その回転数が前記第一インバータ23からの出力周波数に応じて可変されるように構成されている。また、前記第一インバータ23は、前記制御部17と接続され、前記制御部17からの指令信号によって作動するように構成されている。
【0053】
前記開閉弁21は、脱気運転の停止時に、前記ノズル3への被処理水の供給を遮断するためのものであって、前記制御部17と接続され(図示省略)、前記制御部17からの指令信号によって作動するように構成されている。さらに、前記第一流量センサ22は、前記ノズル3への被処理水の供給流量を検知するためのものであって、前記制御部17と接続されている。ここにおいて、前記第一流量センサ22から前記制御部17へ入力される流量検知信号は、前記第一インバータ23への指令信号の生成に利用される。
【0054】
前記排出口9には、処理水排出ライン24が接続されており、この処理水排出ライン24には、上流側から順に第一逆止弁25および第二ポンプ26が設けられている。前記第二ポンプ26は、前記処理槽2内から処理水を排出するためのものであって、第二インバータ27と接続され、その回転数が前記第二インバータ27からの出力周波数に応じて可変されるように構成されている。また、前記第二インバータ27は、前記制御部17と接
続され、前記制御部17からの指令信号によって作動するように構成されている。ここにおいて、前記水位センサ16Aから前記制御部17へ入力される水位検知信号は、前記第二インバータ27への指令信号の生成に利用される。
【0055】
つぎに、前記真空吸引手段4について詳細に説明する。前記真空吸引手段4は、水封式の真空ポンプ28と、封水回収タンク29と、封水還流ポンプ30とを主に備えている。前記真空ポンプ28は、前記排気口10と真空吸引ライン31で接続され、この真空吸引ライン31には、前記排気口10側から順に第二逆止弁32および真空センサ33が設けられている。
【0056】
前記真空ポンプ28は、前記処理槽2内を減圧し、被処理水から分離された気体を排気するものであって、前記制御部17と接続され(図示省略)、前記制御部17からの指令信号によって作動するように構成されている。前記真空センサ33は、前記処理槽2内の真空度を検知するものであって、前記制御部17と接続されている(図示省略)。ここにおいて、前記真空センサ33から前記制御部17へ入力される真空度検知信号は、前記真空ポンプ28への指令信号の生成に利用される。
【0057】
また、前記真空ポンプ28は、前記開閉弁21の下流側の前記被処理水供給ライン18と封水供給ライン34で接続されている。この封水供給ライン34は、被処理水の一部を封水として前記真空ポンプ28へ供給するためのものであって、前記封水供給ライン34には、上流側から順に第三逆止弁35および定流量弁36が設けられている。前記定流量弁36は、前記脱気装置1の運転中に、前記真空ポンプ28へ封水を一定流量で供給することにより、封水の温度上昇を抑制し、前記真空ポンプ28を所定の到達真空度で運転するためのものである。
【0058】
さらに、前記真空ポンプ28は、前記封水回収タンク29と封水回収ライン37で接続されており、前記真空ポンプ28からの使用済みの封水が前記封水回収タンク29内へ回収されるように構成されている。前記封水回収タンク29は、前記ストレーナ19の上流側の前記被処理水供給ライン18と封水還流ライン38で接続されており、この封水還流ライン38には、上流側から順に前記封水還流ポンプ30および第四逆止弁39が設けられている。前記封水還流ポンプ30は、前記封水回収タンク29内に回収された封水を被処理水として返送するためのものであって、前記制御部17と接続され(図示省略)、前記制御部17からの指令信号によって作動するように構成されている。
【0059】
前記制御部17は、その制御手順として、通常水位制御を実行する第一制御手順と、前記第一流量センサ22の異常検出を実行するとともに、異常判定時に前記第一ポンプ20のバックアップ制御を実行する第二制御手順とを記憶している。そして、前記第二制御手順には、前記第一ポンプのバックアップ制御に用いる運転周波数の平均値を求める第三制御手順(図3に示す)を含んで構成されている。
【0060】
前記第一制御手順は、前記第一流量センサ22からの流量検知信号に基づいて、前記第一インバータ23へ指令信号を出力するとともに、前記水位センサ16Aからの水位検知信号に基づいて、前記第二インバータ27へ指令信号を出力する制御である。より具体的には、前記第一ポンプ20の運転を行う前記第一インバータ23へは、前記第一流量センサ22からの流量検知信号が前記制御部17を介して指令信号としてフィードバックされる。そして、前記第一ポンプ20は、前記第一インバータ23の出力周波数に応じてその回転数が制御され、被処理水の供給流量が予め設定された基準処理流量と一致するように運転される。一方、前記第二ポンプ26の運転を行う前記第二インバータ27へは、前記水位センサ16Aからの水位検知信号が前記制御部17を介して指令信号としてフィードバックされる。そして、前記第二ポンプ26は、前記第二インバータ27の出力周波数に
応じてその回転数が制御され、前記処理槽2内における処理水の水位が予め設定された目標水位と一致するように運転される。
【0061】
前記第二制御手順は、前記第一流量センサ22の流量検知信号が設定値(たとえば、本来流れるべき流量の1割)以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプ26を高速で運転して前記処理槽2内の水位を低下させた後、前記第二ポンプ26の作動を停止する第二ステップと、この第二ステップ後の設定時間(たとえば、10秒程度)内において前記水位センサ16Aの水位検出信号に設定値以上の増加速度が検出される場合に所定の増加が有るとして、前記第一流量センサ22が異常と判定する第三ステップと、前記第三ステップにて前記第二流量センサ22の異常が判定されると、前記平均値により前記第一ポンプ20を制御する第四ステップとを含むものである。
【0062】
そして、前記運転周波数の平均値を求める前記第三制御手順は、図3に示すように、前記第一流量センサ22による検出流量が設定範囲内に入っているという第一条件と、前記第一流量センサ22による流量検出信号が前記第一ポンプ20の制御に用いられているという第二条件と、前記第一ポンプ20の運転開始から運転が安定するまでの設定時間経過後であるという第三条件とを同時に満たしているとき、一定時間毎(例えば、3分毎)に前記第一ポンプ20の運転周波数をサンプリングし、順次記憶する。そして、記憶した設定個数を平均して運転周波数の平均値を求めるように構成されている。
【0063】
(実施例1の基本動作)
以下、実施例1に係る前記脱気装置1の脱気運転の基本動作について説明する。この脱気運転は、たとえば前記脱気装置1の下流側に設置された処理水タンク(図示省略)の水位情報に基づく運転開始信号の入力によって開始される。あるいは、前記脱気運転は、たとえば運転開始時刻および運転終了時刻がそれぞれ設定されたタイマ部(図示省略)からの運転開始信号の入力によって開始される。そして、運転開始信号が入力されると、前記制御部17は、前記開閉弁21を開状態にするとともに、前記第一ポンプ20,前記第二ポンプ26および前記真空ポンプ28を作動させる。なお、前記処理水タンクを前記処理槽2の上流側に設け、前記処理水タンクと前記処理槽2との間で循環回路を構成することができる。
【0064】
前記脱気運転において、被処理水は、前記ストレーナ19で懸濁物質が濾過されたのち、前記第一ポンプ20で加圧されながら、前記被処理水供給ライン18および前記供給管11を介して前記ノズル3へ供給される。前記ノズル3へ供給された被処理水は、前記処理槽2の軸方向の中央部から前記天板7へ向かって上向きに噴出される。前記処理槽2内は、前記真空センサ33からの真空度検知信号に基づいて、前記真空ポンプ28の運転を制御することによって、所定真空度の減圧状態に維持されており、前記ノズル3からの被処理水は、水滴として前記脱気部12を上昇しながら脱気される。
【0065】
つぎに、被処理水の水滴は、前記胴部5の側壁に衝突すると、前記処理槽2の中央部へ向かう落下水となる。落下水となった被処理水は、後続の噴出水と衝突することにより、前記処理槽2の上部に押し上げられ、前記脱気促進部14に所定量が保有されながらさらに脱気される。
【0066】
前記脱気促進部14での落下水の保有量が所定量を超え、噴出水で押し上げることができなくなった落下水の一部は、前記脱気促進部14の下部から押し出される。押し出された被処理水は、流下水として前記胴部5の側壁に沿って下降しながらさらに脱気される。
【0067】
前記胴部5の側壁に沿って下降した流下水は、前記処理槽2の下部に順次貯留される。
貯留された被処理水は、前記貯留部13において、水面付近に存在しているときに、さらに脱気され、最終的に処理水として確保される。そして、この処理水は、前記第二ポンプ26によって前記処理槽2内から排出される。
【0068】
(通常水位制御)
さて、前記脱気運転中には、前記第一ポンプ20の定流量制御が行われる。この定流量制御は、前記第一インバータ23のPID制御機能(P制御:比例制御,I制御:積分制御,D制御:微分制御)を使用し、被処理水の供給流量が予め設計された基準処理流量と一致するように、前記第一インバータ23の出力周波数を制御する。前記第一インバータ23のPID制御機能は、前記制御部17に持たせることができる。
【0069】
前記第一インバータ23のPID制御では、図2に示すように、まず前記制御部17が前記第一流量センサ22からの流量検知信号を受けて指令信号(たとえば、4〜20mAの電流値,もしくは1〜5Vの電圧値)を生成し、この指令信号を前記第一インバータ23へ出力する。つぎに、前記第一インバータ23は、前記制御部17からの指令信号をフィードバック値として目標値(すなわち、前記基準処理流量に対応する電流値または電圧値)と比較を行い、これらの値の間に偏差があると、この偏差をゼロにするように出力周波数を制御する。そして、前記第一ポンプ20は、前記第一インバータ23の出力周波数に応じてその回転数が変更される。
【0070】
前記第一ポンプ20の定流量制御によれば、被処理水の供給流量が前記基準処理流量と一致するように運転される。したがって、前記ノズル3からの水滴の大きさが一定となるように、前記第一ポンプ20の運転圧力が自動的に調整されることになり、所定の脱気効率を維持しながら、前記第一ポンプ20の消費電力が低減される。
【0071】
また、前記脱気運転中には、前記第一ポンプ20の定流量制御とともに、前記第二ポンプ26の定流量制御が行われる。この定流量制御は、前記水位制御プログラムにより、前記第一インバータ23と同様に、前記第二インバータ27のPID制御機能を使用し、前記処理槽2内における処理水の水位が予め設定された設定水位と一致するように、前記第二インバータ27の出力周波数を制御する。前記第二インバータ27のPID制御機能も、前記制御部17に持たせることができる。
【0072】
前記第二インバータ27のPID制御では、まず前記制御部17が前記水位センサ16Aからの流量検知信号を受けて指令信号(たとえば、4〜20mAの電流値,もしくは1〜5Vの電圧値)を生成し、この指令信号を前記第二インバータ27へ出力する。つぎに、前記第二インバータ27は、前記制御部17からの指令信号をフィードバック値として目標値(すなわち、前記設定水位に対応する電流値または電圧値)と比較を行い、これらの値の間に偏差があると、この偏差をゼロにするように出力周波数を制御する。そして、前記第二ポンプ26は、前記第二インバータ27の出力周波数に応じてその回転数が変更される。
【0073】
前記第一ポンプ20の定流量制御とともに行われる前記第二ポンプ26の定流量制御によれば、前記処理槽2内における処理水の水位が一定となるように,すなわち前記第一ポンプ20による被処理水の供給流量と前記第二ポンプ26による処理水の排出流量とが等しくなるように運転される。したがって、前記ノズル3からの水滴の大きさが一定となるように、前記第一ポンプ20の運転圧力が自動的に調整されるとともに、前記処理槽2内での脱気時間が一定となるように、前記第二ポンプ26の運転圧力が自動的に調整されることになり、所定の脱気効率を維持しながら、前記両ポンプ20,26の消費電力が同時に低減される。
【0074】
さらに、前記脱気運転中には、前記被処理水供給ライン18を流れる被処理水の一部が前記封水供給ライン34を介して前記真空ポンプ28へ供給される。この被処理水は、封水として前記真空ポンプ28で利用されたのち、前記処理槽2内から吸引された気体とともに、前記封水回収ライン37を介して前記封水回収タンク29へ回収される。前記封水回収タンク29内では、封水と気体とが分離され、分離された気体は、大気中へ放出される。そして、前記封水回収タンク29内の封水が所定水位を超えると、前記封水還流ポンプ30が駆動され、回収された封水は、前記封水還流ライン38を介して前記被処理水供給ライン18へ返送される。
【0075】
ここにおいて、前記真空ポンプ28では、封水が連続的に入れ替えられているため、封水の温度上昇が生じない。したがって、前記真空ポンプ28を所定の到達真空度で安定して運転することができる。また、前記封水回収タンク29では、封水が連続的に入れ替えられながら、封水と気体とが分離されているため、吸引した気体の濃縮が生じない。したがって、前記封水回収タンク29の腐食を効果的に抑制することができる。さらに、回収された封水は、被処理水として再利用されるので、無駄な廃水も生じない。
【0076】
(第一流量センサ22の異常検出)
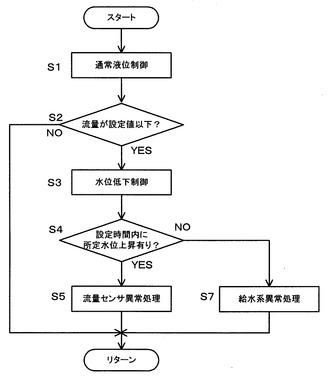
ここで、前記第一流量センサ22の異常検出動作について説明する。図2を参照して、処理ステップS1(以下、処理ステップSNは、単にSNと称する。)では、前述の通常水位制御が行われる。そして、S2において、前記第一流量センサ22の流量検知信号が設定値以下かどうかを判定する。S2において、流量低下が判定されないと、S2からS1に戻る。
【0077】
S2において、YESが判定されると、S3へ移行して、前記処理槽2内の水位を低下させる水位低下制御を行う。この水位低下制御は、前記第一ポンプ20の制御を継続したまま、前記第二ポンプ26を最高速回転(好ましくは、最高速回転とするが、最高速回転でなくても水位低下を生じる回転速度とすることができる。)させることにより行う。そして、水位が設定値に低下すると、水位低下制御を中止し、S4へ移行する。S4では、水位低下制御の終了後、設定時間内に所定水位上昇が有るかどうか、すなわちこの実施例1では前記設定時間内に水位上昇速度が設定値以上かどうかを判定する。
【0078】
(流量センサの異常時の制御)
S4にて、YESが判定されると、S5へ移行して、前記第一流量センサ22が異常であるとして、異常を図示省略の報知器にて報知するするとともに、図3の流量センサ異常時の処理を行う。この異常時処理は、図3で求めた前記第一インバータ23の運転周波数の平均値で前記第一ポンプ20を定速回転することによるバックアップ制御である。これにより、前記第一流量センサ22の異常にも拘わらず、脱気運転が継続される。
【0079】
S4にてNOが判定されると、前記第一ポンプ20または前記開閉弁21の異常(給水系異常)と判定し、脱気装置1の運転を停止する。
【0080】
(運転周波数の平均値を求める制御)
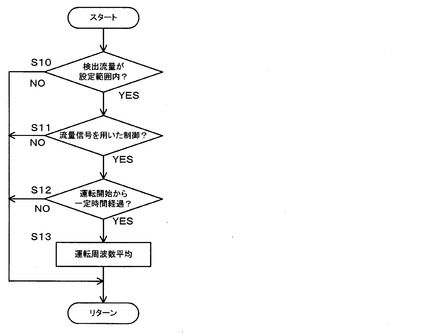
ここで、図3に基づき、前記運転周波数の平均値を求める制御につき説明する。S10では、前記第一流量センサ22による検出流量が前記第一ポンプ20による基準処理流量に対して一定の範囲内に入っているかどうかを判定する。ここでYESが判定されると、S11へ移行して現時点の前記第一ポンプ20の制御が前記第一流量センサ22による制御かどうかを判定する。YESが判定されると、S12へ移行して、前記第一ポンプ20の運転開始から設定時間が経過しているかどうかを判定する。ここで、YESが判定されると、S13へ移行して、運転周波数を平均の対象とすべくサンプリングしてメモリ(図示省略)に記憶する。そして、図2のS5で、前記第一流量センサ22の異常が判定され
ると、異常判定時点から遡って所定個数(所定時間)の記憶した運転周波数を平均することで、運転周波数の平均値を求める。なお、異常判定時に平均するのではなく、記憶した個数が設定の個数に達すると平均するように構成できる。
【0081】
以上の実施例1によれば、前記水位センサ16Aなど脱気装置に必要な構成要素を用いて、前記第一流量センサ22の異常を検出することができ、流量センサ異常検出のための装置を簡易で、安価に構成することができる。また、異常判定を水位上昇速度にて判定するようにしているので、給水系異常を区別して判定することができる。
【0082】
さらに、前記第一流量センサ22の異常時には、前記平均運転周波数にて前記第一ポンプ20の回転数を制御してバックアップ運転を行い、脱気運転を徒に停止することなく継続するので、停止することによる経済的ダメージを防止できる。また、前記運転周波数の平均値を求めるに際して、S10〜S11の処理を行うことで、流量センサの故障時にも、故障前にほぼ近い周波数で前記第一ポンプ20を運転できる。
【0083】
また、この実施例1によれば、被処理水の供給流量の調整作業を容易化するとともに、供給側のポンプの消費電力を低減することができる。また、実施例1によれば、被処理水の供給流量および処理水の排出流量の調整作業を容易化するとともに、供給側および排出側の両ポンプの消費電力を同時に低減することができる。この結果、脱気性能の維持とランニングコストの低減とが同時に実現され、とくに伝熱管や給水配管などの防食を確実,かつ低コストで行うことができる。
【図面の簡単な説明】
【0084】
【図1】この発明の実施例1に係る脱気装置の概略構成図。
【図2】本実施例1の制御手順を説明するフローチャート図。
【図3】本実施例1の他の制御手順を説明するフローチャート図。
【符号の説明】
【0085】
1 脱気装置
2 処理槽
16A 水位センサ
17 制御部(制御手段)
20 第一ポンプ
22 流量センサ
【技術分野】
【0001】
この発明は、液体中の溶存気体を脱気する真空式の脱気装置などの液処理装置に適用される流量センサの異常検出方法および脱気装置に関する。
【背景技術】
【0002】
被処理液中の溶存気体,たとえば溶存酸素を低減させる真空式の脱気装置は、給水,洗浄,あるいは食品加工などの用途に広く利用されている。給水用途における例を挙げると、蒸気ボイラや排ガスボイラなどの熱機器は、給水中の溶存酸素によって伝熱管で腐食を生じ、短期間で破損に至る場合がある。また、ビルやマンションなどの建造物は、給水中の溶存酸素によって給水配管で腐食を生じ、赤水が発生する場合がある。このため、前記熱機器や前記建造物では、給水系統に前記脱気装置を設置し、給水中の溶存酸素を低減することが行われている。
【0003】
前記脱気装置は、特許文献1に開示されているように、まず被処理液を加圧ポンプによって処理槽の上部に設けられたノズルへ供給し、被処理液を前記処理槽内の上部から下部へ向かって噴出する。そして、前記処理槽内を真空吸引することにより、噴出された液滴から溶存気体を脱気したのち、処理液として貯留し、この処理液を送液ポンプによって前記処理槽内から排出する構成の装置である。
【0004】
【特許文献1】特開平8−108005号公報
【0005】
ところで、前記脱気装置では、効率のよい脱気を行うため、前記ノズルからの噴出流量と前記処理槽内の液位とを所定範囲に維持することが重要である。前記ノズルからの噴出流量は、被処理液の液滴の大きさに影響し、噴出流量が少なくなるほど液滴が大きくなり、脱気効率が低下する。一方、前記処理槽内の液位は、被処理液の脱気時間に影響し、液位が高くなるほど脱気時間が短くなり、脱気効率が低下する。そこで、前記脱気装置では、前記ノズルからの液滴の大きさが一定となるように、被処理液の供給流量を予め設定された基準処理流量に調整し、また前記処理槽内の液位が一定となるように、処理液の排出流量を前記基準処理流量に調整し、所定の脱気効率を維持している。
【0006】
被処理液の供給流量の調整は、通常、前記加圧ポンプの下流側に設けた流量センサおよび手動バルブを使用して行われる。具体的には、前記加圧ポンプは、被処理液の粘性や前記ノズルでの圧力損失などを考慮して、前記基準処理流量よりも過剰の供給流量となるように、事前に運転圧力が高く設定される。そして、試運転やメンテナンスなどの際に、前記流量センサで供給流量を計測し、この計測値が前記基準処理流量と一致するように、前記手動バルブの開度を絞っている。
【0007】
一方、処理液の排出流量の調整は、被処理液の供給流量の調整と同様、通常、前記送液ポンプの下流側に設けた流量センサおよび手動バルブを使用して行われる。具体的には、前記送液ポンプは、処理液の粘性や前記処理槽内の真空度などを考慮して、前記基準処理流量よりも過剰の排出流量となるように、事前に運転圧力が高く設定される。そして、試運転やメンテナンスなどの際に、前記流量センサで排出流量を計測し、この計測値が前記基準処理流量と一致するように、前記手動バルブの開度を絞っている。
【0008】
このように、従来の前記脱気装置では、被処理液の供給流量と処理液の排出流量とを手動で調整する構成となっているため、その作業が極めて煩雑であり、性能維持が容易でない。また、前記脱気装置では、前記両ポンプの運転圧力を高く設定し,かつ流量を絞る構
成となっているため、前記両ポンプの消費電力が大きく、ランニングコストの増加を招いている。
【0009】
この発明の出願人は、前記の事情に鑑み、被処理液の供給流量の調整作業を容易化するとともに、供給側のポンプの消費電力を低減するとともに、被処理液の供給流量および処理液の排出流量の調整作業を容易化し、供給側および排出側の両ポンプの消費電力を同時に低減することが可能な脱気装置を特願2006−86837にて出願した。この脱気装置は、処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、前記ノズルへ被処理液を供給する第一ポンプと、前記処理槽内から処理液を排出する第二ポンプと、被処理液の供給流量を検知する第一流量センサと、前記処理槽内の液位を検知する液位センサと、前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、前記第二ポンプの回転数を出力周波数に応じて制御する第二インバータと、前記第一流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備えることを特徴とする。
【発明の開示】
【発明が解決しようとする課題】
【0010】
この発明が解決しようとする課題は、出願済の特願2006−86837の脱気装置などの液処理装置において、流量センサの異常を簡易に検出することである。
【課題を解決するための手段】
【0011】
この発明は、前記課題を解決するためになされたもので、請求項1に記載の発明は、被処理液を貯留する処理槽と、この処理槽へ被処理液を供給するポンプと、前記処理槽から処理液を排出する排液手段と、被処理液の供給流量を検知する流量センサと、前記処理槽内の液位を検知する液位センサとを備え、前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する液処理装置における流量センサの異常検出方法であって、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴としている。
【0012】
請求項1に記載の発明によれば、前記液位センサによる液位信号の変化に基づき、前記流量センサの異常を検出することができ、圧力検出器などのセンサを別個に設けることなく、簡易に流量センサの異常を検出することができる。
【0013】
請求項2に記載の発明は、処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、前記ノズルへ被処理液を供給する第一ポンプと、被処理液の供給流量を検知する流量センサと、前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、前記処理槽内から処理液を排出する第二ポンプと、前記処理槽内の液位を検知する液位センサと、前記第二ポンプの回転数を出力周波数に応じて制御する第二インバータと、前記流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備え、前記制御部は、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプの作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴としている。
【0014】
請求項2に記載の発明によれば、前記液位センサによる液位信号の変化に基づき、前記流量センサの異常を検出することができ、圧力検出器などのセンサを別個に設けることなく、簡易に流量センサの異常を検出することができる。
【0015】
請求項3に記載の発明は、請求項2において、前記制御部は、前記第三ステップにて異常が判定されると、前記流量センサが異常と判定される直前の所定時間における平均した運転周波数により前記第一ポンプを制御することを特徴としている。
【0016】
請求項3に記載の発明によれば、請求項2に記載の発明による効果に加えて、前記流量センサの異常にも拘わらず、前記流量センサの正常時に近い状態で脱気装置の運転を継続することができるという効果を奏する。
【発明の効果】
【0017】
この発明によれば、圧力検出器などのセンサを別個に設けることなく、簡易に流量センサの異常を検出することができる。
【発明を実施するための最良の形態】
【0018】
つぎに、この発明の実施の形態について説明する。この発明の実施の形態の流量センサの異常検出方法は、タワー型脱気装置などの液処理装置に好適に実施される。
【0019】
(実施の形態1)
この実施の形態1を具体的に説明する。この実施の形態1は、被処理液を貯留する処理槽と、この処理槽へ被処理液を供給するポンプと、前記処理槽から処理液を排出する排液手段と、被処理液の供給流量を検知する流量センサと、前記処理槽内の液位を検知する液位センサとを備え、前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する液処理装置における流量センサの異常検出方法であって、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする流量センサの異常検出方法である。
【0020】
この発明の実施の形態1においては、通常液位制御を行いながら前記流量センサの異常検出が行われる。前記通常液位制御は、少なくとも前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する液位制御を含み、この液位制御に加えて前記流量センサの流量検知信号に基づいて前記ポンプの回転数を制御する液供給量制御を含ませることができる。前記設定液位制御は、前記排液手段および/または前記ポンプを用いて行う,すなわち前記排液手段および前記ポンプのいずれか一方または両方を用いて行うことができる。
【0021】
前記流量センサの異常検出は、つぎのようにして行われる。まず、前記第一ステップにおいて、前記流量センサの流量検知信号が設定値以下かどうかを判定する。前記流量検知信号の設定値は、零を越える設定値とするが、零とすることもができる。
【0022】
ついで、前記第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する。このステップにおいて、必要に応じて、前記排液手段の作動停止前に、前記排液手段の作動により前記処理槽内の液位を低下させる制御を付加する。この液位低下制御は、前記第三ステップ終了後に必要以上に液位が上昇しないようにするための制御である。
【0023】
前記第二ステップに続く第三ステップでは、前記ポンプが作動されており、前記第二ス
テップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有るかどうかを監視し、所定の増加が有る場合に前記流量センサが異常と判定する。前記所定の増加は、好ましくは、液位検知信号の増加速度が設定値以上とする。前記所定の増加があるかどうかの監視中もS2と同じ判定が行われ、流量が設定値以下でないと設定時間だけ判定されると、前記流量センサの異常とは判定しない。
【0024】
このように、異常判定条件を液位検知信号の増加速度が設定値以上とすることにより、前記処理槽からの給液系の異常と流量センサ異常とを判別することができる。
【0025】
ここで、この発明の実施の形態1を構成する構成要素を説明する。前記処理槽は、被処理液に何らかの処理が行われるものであればよく、特定の構造に限定されない。この処理槽は、この実施の形態1が適用される装置がタワー型脱気装置であれば、脱気を行う処理槽である。
【0026】
前記ポンプは、前記流量センサの流量検知信号に基づいて前記ポンプの回転数を制御する液供給量制御を含む場合は、回転数制御可能なポンプとし、好ましくは、インバータにより回転数を制御するものとする。このポンプは、ON−OFF式のものでも良い。
【0027】
前記排液手段は、前記処理槽から液体を排出する手段であり、好ましくは、ポンプとするが、弁の開閉により排液制御が可能であれば、開閉弁とすることができる。ここで、「排液」とは、液体状態で排出することを意味するだけでなく、蒸気ボイラの缶体のように、気体状態で排出することをも意味する。
【0028】
前記流量センサは、前記処理槽へ供給する液量を検出できるものであれば、特定の流量センサに限定されない。前記流量センサは、流量計と称することができる。また、前記流量センサの検出信号は、前記ポンプの回転数を制御するために用いるものに限定されず、例えば、単なる流量の検出、報知のみに用いることができる。
【0029】
前記液位センサは、好ましくは、伝送出力式液位センサ(アナログ出力式液位センサと称することができる。)とするが、接点出力式液位センサとすることができる。前記伝送出力式液位センサは、前記処理槽内の液体が導電性か非導電性かにより、また前記処理槽の容器の材質が金属かどうかで、構成を異にするが、この実施の形態1においては、どのような構成の伝送出力式液位センサでも適用可能である。また、伝送出力式液位検出手段は、好ましくは、静電容量式レベルセンサとするが、これに限定されないものであり、水頭圧を検知して液位を測定する圧力センサや、フロート式の水位センサ、超音波式の水位センサなどとすることができる。
【0030】
前記接点出力式液位検出手段は、前記処理槽内の特定液位における出力状態の変化に基づいて、前記特定液位を検出するレベルセンサであり、好ましくは、特定液位を検出する電極式レベルスイッチとするが、フロート式レベルセンサとすることができる。
【0031】
この発明の実施の形態1は、典型的には、つぎの実施の形態2の脱気装置に適用される。
【0032】
(実施の形態2)
この実施の形態2は、処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、前記ノズルへ被処理液を供給する第一ポンプと、被処理液の供給流量を検知する流量センサと、前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、前記処理槽内から処理液を排出する第二ポンプと、前記処理槽内の液位を検知する液位センサと、前記第二ポンプの回転数を出力周波数に応じて制御
する第二インバータと、前記流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備え、前記制御部は、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプを運転して前記処理槽内の液位を低下させた後、前記第二ポンプの作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする脱気装置である。
【0033】
この実施の形態2においては、つぎの通常液位制御が行われる。前記第一ポンプの運転は、前記第一インバータによって行われる。前記第一インバータへは、前記第一流量センサからの流量検知信号が前記制御部を介して指令信号としてフィードバックされる。そして、前記第一ポンプは、前記第一インバータの出力周波数に応じてその回転数が制御され、被処理液の供給流量が予め設定された基準処理流量と一致するように運転される。一方、前記第二ポンプの運転は、前記第二インバータによって行われる。前記第二インバータへは、前記液位センサからの液位検知信号が前記制御部を介して指令信号としてフィードバックされる。そして、前記第二ポンプは、前記第二インバータの出力周波数に応じてその回転数が制御され、前記処理槽内における処理液の液位が予め設定された基準液位と一致するように運転される。したがって、前記ノズルからの液滴の大きさが一定となるように、前記第一ポンプの運転圧力が自動的に調整されるとともに、前記処理槽内での脱気時間が一定となるように、前記第二ポンプの運転圧力が自動的に調整されることになり、所定の脱気効率を維持しながら、前記両ポンプの消費電力が同時に低減される。
【0034】
そして、前記実施の形態1と同様な、流量センサの異常検出制御が行われる。前記実施の形態1と異なるのは、前記第二ステップにおいて、前記第二ポンプの停止前に前記第二ポンプを作動(駆動)して、前記処理槽内の液位を低下させる制御を加えた点だけであり、その他は、同様であるのでその説明を省略する。
【0035】
つぎに、この実施の形態2の構成要素を説明する。この実施の形態2において、前記制御部以外は、前記実施の形態1と基本的に同様であるので、その説明を省略する。
【0036】
前記制御部は、制御手順の一部として、前記通常液位制御を実行する第一制御手順と、前記流量センサの異常検出を実行するとともに、異常判定時に前記第一ポンプのバックアップ制御を実行する第二制御手順とを記憶している。そして、これらの制御手順に加えて、前記第一ポンプのバックアップ制御に用いる運転周波数の平均値を求める第三制御手順を含ませることができる。この第三制御手順は、前記第二制御手順に含ませることができる。
【0037】
この第三制御手順は、好ましくは、前記流量センサによる検出流量が前記第一ポンプによる基準処理流量(目標流量と称することができる。)に対して一定の範囲内に入っているかどうかという第一条件と、前記流量センサによる流量検出信号が前記第一ポンプの制御に用いられているという第二条件と、前記第一ポンプの運転開始から設定時間(ポンプの運転が安定するための時間)経過後であるという第三条件とを同時に満たしているとき、所定時間毎に運転周波数をサンプリングする。そして、サンプリングされた所定個数を平均して平均運転周波数を求める。
【0038】
さらに、前記制御部の制御手順として、前記伝送出力式液位センサが正常かどうかを判定する第一異常判定プログラムを含ませることができる。そして、前記制御手順には、更に、前記伝送出力式液位センサの異常判定に用いる接点出力式液位センサが正常かどうかを判定する第二異常判定プログラムを含くませることができる。この実施の形態2におい
ては、好ましくは、これら第一異常判定プログラムにより前記伝送出力式液位センサが正常と判定され、かつ前記第二異常判定プログラムにより前記接点出力式液位センサが正常と判定されたとき、前記流量センサの異常検出の結果を正しいと判定する。
【0039】
前記第一異常判定プログラムは、特開2000−55712号公報に記載の方法とすることができるが、これに限定されない。また、前記第二異常判定プログラムは、特開2000−55712号公報や特公平4−8732号公報に記載の方法とすることができるが、これに限定されない。
【実施例1】
【0040】
(実施例1の構成)
以下、この発明の実施例1を図面に基づいて詳細に説明する。図1は、本実施例1に係る脱気装置の概略構成図を示し、図2は、本実施例1の要部制御手順を説明するフローチャート図であり、図3は、本実施例1の他の要部制御手順を説明するフローチャート図である。
【0041】
本実施例1に係る脱気装置は、たとえば蒸気ボイラや排ガスボイラ等の熱機器,あるいはビルやマンション等の建造物などの給水系統に設置され、伝熱管や給水配管の防食を目的として給水中の溶存酸素を低減する場合に適用される。図1において、脱気装置1は、処理槽2と、ノズル3と、真空吸引手段4とを主に備えている。
【0042】
前記処理槽2は、垂直に立設された筒状の胴部5を有しており、下端開口部を底板6で封鎖するとともに、上端開口部を天板7で封鎖することにより、一体化された密閉容器を構成している。ここにおいて、前記処理槽2は、耐圧性,耐熱性および耐食性を確保する観点から、通常、ステンレス鋼(たとえば、SUS304など)を使用して形成される。
【0043】
前記底板6には、被処理水の供給口8と処理水の排出口9とがそれぞれ設けられており、前記供給口8は、前記底板6の中央部,すなわち前記底板6のほぼ中心部に設けられている。一方、前記天板7には、排気口10が設けられており、この排気口10には、前記真空吸引手段4が接続されている。この真空吸引手段4の詳細については、後述する。
【0044】
前記処理槽2内において、前記供給口8には、上方へと延びる供給管11の一端側が液密に接続されており、この供給管11の他端側には、前記ノズル3が接続されている。すなわち、前記ノズル3は、前記処理槽2の軸方向の中央部に噴出方向が上向きになるように配設され、前記供給管11を介して供給された被処理水が前記天板7へ向かって噴出されるように構成されている。
【0045】
前記処理槽2内において、前記ノズル3の噴出口よりも上方の空間は、被処理水の脱気部12に設定されている。この脱気部12の高さは、前記ノズル3から被処理水が所定角度で噴出されたとき、噴出コーン裾部の水滴が前記胴部5の側壁まで到達可能な高さが確保されている。一方、前記ノズル3の噴出口よりも下方の空間は、処理水の貯留部13に設定されている。ここにおいて、前記処理槽2の上部には、脱気効率を高めるため、前記ノズル3からの噴出水と前記脱気部12から落下水とを衝突させ、被処理水の前記貯留部13への落下を遅延させる脱気促進部14が設けられていてもよい。この脱気促進部14の具体的な構成と作用については、本願出願人らによる特願2006−13552号に記載されている。
【0046】
前記胴部5の側方には、処理水の水位を検出する水位検出筒15が併設されており、この水位検出筒15の上部が前記脱気部12と連通されているとともに、前記水位検出筒15の下部が前記貯留部13と連通されている。前記水位検出筒15には、前記処理槽2内
の水位を検知する伝送出力式水位検出手段としての水位センサ16Aが挿入されており、この水位センサ16Aは、前記脱気装置1の運転を制御する制御部17と接続されている。
【0047】
前記水位センサ16Aは、減圧状態下で前記処理槽2内の水位を連続的に検知可能なものであって、この実施例1では、絶縁被覆した金属電極と金属製胴部5と間の静電容量の変化に基づき水位を検出する静電容量式のセンサとしている。
【0048】
また、前記水位検出筒15には、前記処理槽2内の水位を検知する接点出力式水位(水位)検出手段としての第一電極(以下、L電極という。)16B,第二電極(以下、H電極という。)16Cが挿入されており、これらの電極16B,16Cも、前記制御部17と接続されている。前記L電極16Bおよび前記H電極16Cは、補助電極,出力補正用電極またはバックアップ制御用電極と称することができる。
【0049】
ここにおいて、前記処理槽2には、下限水位(位置)LL(例えば、50mm)〜上限水位(位置)HH(例えば、250mm)の間の許容水位制御帯御帯が設定されている。この許容水位制御帯とは、この制御帯を越えて水位が制御されると実施例1の脱気装置において不都合が生ずる制御帯である。前記下限位置LLは、脱気水を連続的に供給可能とするために前記処理槽2内に最低限必要な下限水位であり、上限位置HHは、前記処理槽2ノズル3が水中に没しないように設定される上限水位である。
【0050】
前記水位センサ16Aは、前記許容水位制御帯の下限位置LLよりも低い水位から前記許容水位制御帯の上限位置HHよりも高い水位まで,連続して検出することが可能となるように構成されている。
【0051】
前記L電極16Bおよび前記H電極16Cは、前記許容水位制御帯の内側において、前記処理槽2内の水位の変化に基づいて、それぞれL位置,H位置を検出する。後述のように、前記処理槽2内の水位は設定水位(目標水位)に制御されるが、前記設定水位は、前記L位置とH位置の丁度中間に設定している。
【0052】
さて、前記供給口8には、被処理水供給ライン18が接続されており、この被処理水供給ライン18には、上流側から順にストレーナ19,第一ポンプ20,開閉弁21および第一流量センサ22が設けられている。前記第一ポンプ20は、前記ストレーナ19で懸濁物質が濾過された被処理水を前記ノズル3へ供給するためのものであって、第一インバータ23と接続され、その回転数が前記第一インバータ23からの出力周波数に応じて可変されるように構成されている。また、前記第一インバータ23は、前記制御部17と接続され、前記制御部17からの指令信号によって作動するように構成されている。
【0053】
前記開閉弁21は、脱気運転の停止時に、前記ノズル3への被処理水の供給を遮断するためのものであって、前記制御部17と接続され(図示省略)、前記制御部17からの指令信号によって作動するように構成されている。さらに、前記第一流量センサ22は、前記ノズル3への被処理水の供給流量を検知するためのものであって、前記制御部17と接続されている。ここにおいて、前記第一流量センサ22から前記制御部17へ入力される流量検知信号は、前記第一インバータ23への指令信号の生成に利用される。
【0054】
前記排出口9には、処理水排出ライン24が接続されており、この処理水排出ライン24には、上流側から順に第一逆止弁25および第二ポンプ26が設けられている。前記第二ポンプ26は、前記処理槽2内から処理水を排出するためのものであって、第二インバータ27と接続され、その回転数が前記第二インバータ27からの出力周波数に応じて可変されるように構成されている。また、前記第二インバータ27は、前記制御部17と接
続され、前記制御部17からの指令信号によって作動するように構成されている。ここにおいて、前記水位センサ16Aから前記制御部17へ入力される水位検知信号は、前記第二インバータ27への指令信号の生成に利用される。
【0055】
つぎに、前記真空吸引手段4について詳細に説明する。前記真空吸引手段4は、水封式の真空ポンプ28と、封水回収タンク29と、封水還流ポンプ30とを主に備えている。前記真空ポンプ28は、前記排気口10と真空吸引ライン31で接続され、この真空吸引ライン31には、前記排気口10側から順に第二逆止弁32および真空センサ33が設けられている。
【0056】
前記真空ポンプ28は、前記処理槽2内を減圧し、被処理水から分離された気体を排気するものであって、前記制御部17と接続され(図示省略)、前記制御部17からの指令信号によって作動するように構成されている。前記真空センサ33は、前記処理槽2内の真空度を検知するものであって、前記制御部17と接続されている(図示省略)。ここにおいて、前記真空センサ33から前記制御部17へ入力される真空度検知信号は、前記真空ポンプ28への指令信号の生成に利用される。
【0057】
また、前記真空ポンプ28は、前記開閉弁21の下流側の前記被処理水供給ライン18と封水供給ライン34で接続されている。この封水供給ライン34は、被処理水の一部を封水として前記真空ポンプ28へ供給するためのものであって、前記封水供給ライン34には、上流側から順に第三逆止弁35および定流量弁36が設けられている。前記定流量弁36は、前記脱気装置1の運転中に、前記真空ポンプ28へ封水を一定流量で供給することにより、封水の温度上昇を抑制し、前記真空ポンプ28を所定の到達真空度で運転するためのものである。
【0058】
さらに、前記真空ポンプ28は、前記封水回収タンク29と封水回収ライン37で接続されており、前記真空ポンプ28からの使用済みの封水が前記封水回収タンク29内へ回収されるように構成されている。前記封水回収タンク29は、前記ストレーナ19の上流側の前記被処理水供給ライン18と封水還流ライン38で接続されており、この封水還流ライン38には、上流側から順に前記封水還流ポンプ30および第四逆止弁39が設けられている。前記封水還流ポンプ30は、前記封水回収タンク29内に回収された封水を被処理水として返送するためのものであって、前記制御部17と接続され(図示省略)、前記制御部17からの指令信号によって作動するように構成されている。
【0059】
前記制御部17は、その制御手順として、通常水位制御を実行する第一制御手順と、前記第一流量センサ22の異常検出を実行するとともに、異常判定時に前記第一ポンプ20のバックアップ制御を実行する第二制御手順とを記憶している。そして、前記第二制御手順には、前記第一ポンプのバックアップ制御に用いる運転周波数の平均値を求める第三制御手順(図3に示す)を含んで構成されている。
【0060】
前記第一制御手順は、前記第一流量センサ22からの流量検知信号に基づいて、前記第一インバータ23へ指令信号を出力するとともに、前記水位センサ16Aからの水位検知信号に基づいて、前記第二インバータ27へ指令信号を出力する制御である。より具体的には、前記第一ポンプ20の運転を行う前記第一インバータ23へは、前記第一流量センサ22からの流量検知信号が前記制御部17を介して指令信号としてフィードバックされる。そして、前記第一ポンプ20は、前記第一インバータ23の出力周波数に応じてその回転数が制御され、被処理水の供給流量が予め設定された基準処理流量と一致するように運転される。一方、前記第二ポンプ26の運転を行う前記第二インバータ27へは、前記水位センサ16Aからの水位検知信号が前記制御部17を介して指令信号としてフィードバックされる。そして、前記第二ポンプ26は、前記第二インバータ27の出力周波数に
応じてその回転数が制御され、前記処理槽2内における処理水の水位が予め設定された目標水位と一致するように運転される。
【0061】
前記第二制御手順は、前記第一流量センサ22の流量検知信号が設定値(たとえば、本来流れるべき流量の1割)以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプ26を高速で運転して前記処理槽2内の水位を低下させた後、前記第二ポンプ26の作動を停止する第二ステップと、この第二ステップ後の設定時間(たとえば、10秒程度)内において前記水位センサ16Aの水位検出信号に設定値以上の増加速度が検出される場合に所定の増加が有るとして、前記第一流量センサ22が異常と判定する第三ステップと、前記第三ステップにて前記第二流量センサ22の異常が判定されると、前記平均値により前記第一ポンプ20を制御する第四ステップとを含むものである。
【0062】
そして、前記運転周波数の平均値を求める前記第三制御手順は、図3に示すように、前記第一流量センサ22による検出流量が設定範囲内に入っているという第一条件と、前記第一流量センサ22による流量検出信号が前記第一ポンプ20の制御に用いられているという第二条件と、前記第一ポンプ20の運転開始から運転が安定するまでの設定時間経過後であるという第三条件とを同時に満たしているとき、一定時間毎(例えば、3分毎)に前記第一ポンプ20の運転周波数をサンプリングし、順次記憶する。そして、記憶した設定個数を平均して運転周波数の平均値を求めるように構成されている。
【0063】
(実施例1の基本動作)
以下、実施例1に係る前記脱気装置1の脱気運転の基本動作について説明する。この脱気運転は、たとえば前記脱気装置1の下流側に設置された処理水タンク(図示省略)の水位情報に基づく運転開始信号の入力によって開始される。あるいは、前記脱気運転は、たとえば運転開始時刻および運転終了時刻がそれぞれ設定されたタイマ部(図示省略)からの運転開始信号の入力によって開始される。そして、運転開始信号が入力されると、前記制御部17は、前記開閉弁21を開状態にするとともに、前記第一ポンプ20,前記第二ポンプ26および前記真空ポンプ28を作動させる。なお、前記処理水タンクを前記処理槽2の上流側に設け、前記処理水タンクと前記処理槽2との間で循環回路を構成することができる。
【0064】
前記脱気運転において、被処理水は、前記ストレーナ19で懸濁物質が濾過されたのち、前記第一ポンプ20で加圧されながら、前記被処理水供給ライン18および前記供給管11を介して前記ノズル3へ供給される。前記ノズル3へ供給された被処理水は、前記処理槽2の軸方向の中央部から前記天板7へ向かって上向きに噴出される。前記処理槽2内は、前記真空センサ33からの真空度検知信号に基づいて、前記真空ポンプ28の運転を制御することによって、所定真空度の減圧状態に維持されており、前記ノズル3からの被処理水は、水滴として前記脱気部12を上昇しながら脱気される。
【0065】
つぎに、被処理水の水滴は、前記胴部5の側壁に衝突すると、前記処理槽2の中央部へ向かう落下水となる。落下水となった被処理水は、後続の噴出水と衝突することにより、前記処理槽2の上部に押し上げられ、前記脱気促進部14に所定量が保有されながらさらに脱気される。
【0066】
前記脱気促進部14での落下水の保有量が所定量を超え、噴出水で押し上げることができなくなった落下水の一部は、前記脱気促進部14の下部から押し出される。押し出された被処理水は、流下水として前記胴部5の側壁に沿って下降しながらさらに脱気される。
【0067】
前記胴部5の側壁に沿って下降した流下水は、前記処理槽2の下部に順次貯留される。
貯留された被処理水は、前記貯留部13において、水面付近に存在しているときに、さらに脱気され、最終的に処理水として確保される。そして、この処理水は、前記第二ポンプ26によって前記処理槽2内から排出される。
【0068】
(通常水位制御)
さて、前記脱気運転中には、前記第一ポンプ20の定流量制御が行われる。この定流量制御は、前記第一インバータ23のPID制御機能(P制御:比例制御,I制御:積分制御,D制御:微分制御)を使用し、被処理水の供給流量が予め設計された基準処理流量と一致するように、前記第一インバータ23の出力周波数を制御する。前記第一インバータ23のPID制御機能は、前記制御部17に持たせることができる。
【0069】
前記第一インバータ23のPID制御では、図2に示すように、まず前記制御部17が前記第一流量センサ22からの流量検知信号を受けて指令信号(たとえば、4〜20mAの電流値,もしくは1〜5Vの電圧値)を生成し、この指令信号を前記第一インバータ23へ出力する。つぎに、前記第一インバータ23は、前記制御部17からの指令信号をフィードバック値として目標値(すなわち、前記基準処理流量に対応する電流値または電圧値)と比較を行い、これらの値の間に偏差があると、この偏差をゼロにするように出力周波数を制御する。そして、前記第一ポンプ20は、前記第一インバータ23の出力周波数に応じてその回転数が変更される。
【0070】
前記第一ポンプ20の定流量制御によれば、被処理水の供給流量が前記基準処理流量と一致するように運転される。したがって、前記ノズル3からの水滴の大きさが一定となるように、前記第一ポンプ20の運転圧力が自動的に調整されることになり、所定の脱気効率を維持しながら、前記第一ポンプ20の消費電力が低減される。
【0071】
また、前記脱気運転中には、前記第一ポンプ20の定流量制御とともに、前記第二ポンプ26の定流量制御が行われる。この定流量制御は、前記水位制御プログラムにより、前記第一インバータ23と同様に、前記第二インバータ27のPID制御機能を使用し、前記処理槽2内における処理水の水位が予め設定された設定水位と一致するように、前記第二インバータ27の出力周波数を制御する。前記第二インバータ27のPID制御機能も、前記制御部17に持たせることができる。
【0072】
前記第二インバータ27のPID制御では、まず前記制御部17が前記水位センサ16Aからの流量検知信号を受けて指令信号(たとえば、4〜20mAの電流値,もしくは1〜5Vの電圧値)を生成し、この指令信号を前記第二インバータ27へ出力する。つぎに、前記第二インバータ27は、前記制御部17からの指令信号をフィードバック値として目標値(すなわち、前記設定水位に対応する電流値または電圧値)と比較を行い、これらの値の間に偏差があると、この偏差をゼロにするように出力周波数を制御する。そして、前記第二ポンプ26は、前記第二インバータ27の出力周波数に応じてその回転数が変更される。
【0073】
前記第一ポンプ20の定流量制御とともに行われる前記第二ポンプ26の定流量制御によれば、前記処理槽2内における処理水の水位が一定となるように,すなわち前記第一ポンプ20による被処理水の供給流量と前記第二ポンプ26による処理水の排出流量とが等しくなるように運転される。したがって、前記ノズル3からの水滴の大きさが一定となるように、前記第一ポンプ20の運転圧力が自動的に調整されるとともに、前記処理槽2内での脱気時間が一定となるように、前記第二ポンプ26の運転圧力が自動的に調整されることになり、所定の脱気効率を維持しながら、前記両ポンプ20,26の消費電力が同時に低減される。
【0074】
さらに、前記脱気運転中には、前記被処理水供給ライン18を流れる被処理水の一部が前記封水供給ライン34を介して前記真空ポンプ28へ供給される。この被処理水は、封水として前記真空ポンプ28で利用されたのち、前記処理槽2内から吸引された気体とともに、前記封水回収ライン37を介して前記封水回収タンク29へ回収される。前記封水回収タンク29内では、封水と気体とが分離され、分離された気体は、大気中へ放出される。そして、前記封水回収タンク29内の封水が所定水位を超えると、前記封水還流ポンプ30が駆動され、回収された封水は、前記封水還流ライン38を介して前記被処理水供給ライン18へ返送される。
【0075】
ここにおいて、前記真空ポンプ28では、封水が連続的に入れ替えられているため、封水の温度上昇が生じない。したがって、前記真空ポンプ28を所定の到達真空度で安定して運転することができる。また、前記封水回収タンク29では、封水が連続的に入れ替えられながら、封水と気体とが分離されているため、吸引した気体の濃縮が生じない。したがって、前記封水回収タンク29の腐食を効果的に抑制することができる。さらに、回収された封水は、被処理水として再利用されるので、無駄な廃水も生じない。
【0076】
(第一流量センサ22の異常検出)
ここで、前記第一流量センサ22の異常検出動作について説明する。図2を参照して、処理ステップS1(以下、処理ステップSNは、単にSNと称する。)では、前述の通常水位制御が行われる。そして、S2において、前記第一流量センサ22の流量検知信号が設定値以下かどうかを判定する。S2において、流量低下が判定されないと、S2からS1に戻る。
【0077】
S2において、YESが判定されると、S3へ移行して、前記処理槽2内の水位を低下させる水位低下制御を行う。この水位低下制御は、前記第一ポンプ20の制御を継続したまま、前記第二ポンプ26を最高速回転(好ましくは、最高速回転とするが、最高速回転でなくても水位低下を生じる回転速度とすることができる。)させることにより行う。そして、水位が設定値に低下すると、水位低下制御を中止し、S4へ移行する。S4では、水位低下制御の終了後、設定時間内に所定水位上昇が有るかどうか、すなわちこの実施例1では前記設定時間内に水位上昇速度が設定値以上かどうかを判定する。
【0078】
(流量センサの異常時の制御)
S4にて、YESが判定されると、S5へ移行して、前記第一流量センサ22が異常であるとして、異常を図示省略の報知器にて報知するするとともに、図3の流量センサ異常時の処理を行う。この異常時処理は、図3で求めた前記第一インバータ23の運転周波数の平均値で前記第一ポンプ20を定速回転することによるバックアップ制御である。これにより、前記第一流量センサ22の異常にも拘わらず、脱気運転が継続される。
【0079】
S4にてNOが判定されると、前記第一ポンプ20または前記開閉弁21の異常(給水系異常)と判定し、脱気装置1の運転を停止する。
【0080】
(運転周波数の平均値を求める制御)
ここで、図3に基づき、前記運転周波数の平均値を求める制御につき説明する。S10では、前記第一流量センサ22による検出流量が前記第一ポンプ20による基準処理流量に対して一定の範囲内に入っているかどうかを判定する。ここでYESが判定されると、S11へ移行して現時点の前記第一ポンプ20の制御が前記第一流量センサ22による制御かどうかを判定する。YESが判定されると、S12へ移行して、前記第一ポンプ20の運転開始から設定時間が経過しているかどうかを判定する。ここで、YESが判定されると、S13へ移行して、運転周波数を平均の対象とすべくサンプリングしてメモリ(図示省略)に記憶する。そして、図2のS5で、前記第一流量センサ22の異常が判定され
ると、異常判定時点から遡って所定個数(所定時間)の記憶した運転周波数を平均することで、運転周波数の平均値を求める。なお、異常判定時に平均するのではなく、記憶した個数が設定の個数に達すると平均するように構成できる。
【0081】
以上の実施例1によれば、前記水位センサ16Aなど脱気装置に必要な構成要素を用いて、前記第一流量センサ22の異常を検出することができ、流量センサ異常検出のための装置を簡易で、安価に構成することができる。また、異常判定を水位上昇速度にて判定するようにしているので、給水系異常を区別して判定することができる。
【0082】
さらに、前記第一流量センサ22の異常時には、前記平均運転周波数にて前記第一ポンプ20の回転数を制御してバックアップ運転を行い、脱気運転を徒に停止することなく継続するので、停止することによる経済的ダメージを防止できる。また、前記運転周波数の平均値を求めるに際して、S10〜S11の処理を行うことで、流量センサの故障時にも、故障前にほぼ近い周波数で前記第一ポンプ20を運転できる。
【0083】
また、この実施例1によれば、被処理水の供給流量の調整作業を容易化するとともに、供給側のポンプの消費電力を低減することができる。また、実施例1によれば、被処理水の供給流量および処理水の排出流量の調整作業を容易化するとともに、供給側および排出側の両ポンプの消費電力を同時に低減することができる。この結果、脱気性能の維持とランニングコストの低減とが同時に実現され、とくに伝熱管や給水配管などの防食を確実,かつ低コストで行うことができる。
【図面の簡単な説明】
【0084】
【図1】この発明の実施例1に係る脱気装置の概略構成図。
【図2】本実施例1の制御手順を説明するフローチャート図。
【図3】本実施例1の他の制御手順を説明するフローチャート図。
【符号の説明】
【0085】
1 脱気装置
2 処理槽
16A 水位センサ
17 制御部(制御手段)
20 第一ポンプ
22 流量センサ
【特許請求の範囲】
【請求項1】
被処理液を貯留する処理槽と、この処理槽へ被処理液を供給するポンプと、前記処理槽から処理液を排出する排液手段と、被処理液の供給流量を検知する流量センサと、前記処理槽内の液位を検知する液位センサとを備え、前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する水処理装置における流量センサの異常検出方法であって、
前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする流量センサの異常検出方法。
【請求項2】
処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、
前記ノズルへ被処理液を供給する第一ポンプと、
被処理液の供給流量を検知する流量センサと、
前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、
前記処理槽内から処理液を排出する第二ポンプと、
前記処理槽内の液位を検知する液位センサと、
前記第二ポンプの回転数を出力周波数に応じて制御する第二インバータと、
前記流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備え、
前記制御部は、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプの作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする脱気装置。
【請求項3】
前記制御部は、前記第三ステップにて異常が判定されると、前記流量センサが異常と判定される直前の所定時間における平均した運転周波数により前記第一ポンプを制御することを特徴とする請求項2に記載の脱気装置。
【請求項1】
被処理液を貯留する処理槽と、この処理槽へ被処理液を供給するポンプと、前記処理槽から処理液を排出する排液手段と、被処理液の供給流量を検知する流量センサと、前記処理槽内の液位を検知する液位センサとを備え、前記液位センサの液位検知信号に基づいて前記処理槽内の液位を設定液位に制御する水処理装置における流量センサの異常検出方法であって、
前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記排液手段の作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする流量センサの異常検出方法。
【請求項2】
処理槽内へ被処理液を噴出するノズルと前記処理槽内の真空吸引手段とを備えた脱気装置であって、
前記ノズルへ被処理液を供給する第一ポンプと、
被処理液の供給流量を検知する流量センサと、
前記第一ポンプの回転数を出力周波数に応じて制御する第一インバータと、
前記処理槽内から処理液を排出する第二ポンプと、
前記処理槽内の液位を検知する液位センサと、
前記第二ポンプの回転数を出力周波数に応じて制御する第二インバータと、
前記流量センサからの流量検知信号に基づいて、前記第一インバータへ指令信号を出力するとともに、前記液位センサからの液位検知信号に基づいて、前記第二インバータへ指令信号を出力する制御部とを備え、
前記制御部は、前記流量センサの流量検知信号が設定値以下かどうかを判定する第一ステップと、この第一ステップにおいて設定値以下が判定されると前記第二ポンプの作動を停止する第二ステップと、この第二ステップ後の設定時間内に前記液位センサの液位検知信号に所定の増加が有る場合に前記流量センサが異常と判定する第三ステップとを行うことを特徴とする脱気装置。
【請求項3】
前記制御部は、前記第三ステップにて異常が判定されると、前記流量センサが異常と判定される直前の所定時間における平均した運転周波数により前記第一ポンプを制御することを特徴とする請求項2に記載の脱気装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−68997(P2009−68997A)
【公開日】平成21年4月2日(2009.4.2)
【国際特許分類】
【出願番号】特願2007−237736(P2007−237736)
【出願日】平成19年9月13日(2007.9.13)
【出願人】(000175272)三浦工業株式会社 (1,055)
【出願人】(504143522)株式会社三浦プロテック (488)
【Fターム(参考)】
【公開日】平成21年4月2日(2009.4.2)
【国際特許分類】
【出願日】平成19年9月13日(2007.9.13)
【出願人】(000175272)三浦工業株式会社 (1,055)
【出願人】(504143522)株式会社三浦プロテック (488)
【Fターム(参考)】
[ Back to top ]