
浮遊粒子状物質の採取装置
【課題】簡易な構成で、フィルタ交換の煩わしさを解消することができる浮遊粒子状物質の採取装置を提供することを目的とする。
【解決手段】浮遊粒子状物質の採取装置は、試料大気中に含まれる浮遊粒子状物質のうち粒径が予め定められた値以下である微小粒子を含む浮遊粒子状物質含有空気を得る少なくとも1つ以上の分級手段と、上記浮遊粒子状物質含有空気から上記微小粒子を採取する複数の採取手段と、上記浮遊粒子状物質を含む試料大気を吸引するための吸引手段と、上記吸引手段によって吸引される上記試料大気の流量を調節する流量制御手段と、上記浮遊粒子状物質含有空気中の上記微小粒子が、予め定められたタイミングで異なる上記採取手段によって採取されるように上記試料大気の流れを選択的に切替える切替手段と、上記切替手段に切替指示を出力する切替制御手段とを備える。
【解決手段】浮遊粒子状物質の採取装置は、試料大気中に含まれる浮遊粒子状物質のうち粒径が予め定められた値以下である微小粒子を含む浮遊粒子状物質含有空気を得る少なくとも1つ以上の分級手段と、上記浮遊粒子状物質含有空気から上記微小粒子を採取する複数の採取手段と、上記浮遊粒子状物質を含む試料大気を吸引するための吸引手段と、上記吸引手段によって吸引される上記試料大気の流量を調節する流量制御手段と、上記浮遊粒子状物質含有空気中の上記微小粒子が、予め定められたタイミングで異なる上記採取手段によって採取されるように上記試料大気の流れを選択的に切替える切替手段と、上記切替手段に切替指示を出力する切替制御手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、浮遊粒子状物質の採取装置に関し、より詳しくは、特に人の健康に影響の大きい浮遊粒子状物質の採取装置に関する。
【背景技術】
【0002】
大気中には、種々の粒径の浮遊粒子状物質(SPM:Suspended Particulate Matter)が存在する。浮遊粒子状物質は、その大きさが微小なため、人が呼吸するに際し、気道で濾過されずに、吸引され、肺に沈降することから、特に人に対する毒性が高い。近年、浮遊粒子状物質が、人の健康に強い影響を及ぼすことが様々報告され、高い関心が持たれている。
【0003】
例えば、米国では、浮遊粒子状物質の標準測定方法(Federal Register Vol.62, No.138/Appendix L:略称FRM法、以下、単にFMR法と称す)が制定されており、非常に多くの実験データが蓄積され、特に疫学用データとして有用性が高いものとなっている。なお、一般的に、大気中の浮遊粒子状物質は、粒径2.5μm程度を境として粗大粒子(coarse particle,以下CPと略すことがある)と微小粒子(fine particle,以下FPと略すことがある)とに区切られている。
【0004】
なお、非特許文献1には、上記FRM法に基づいて、大気中に浮遊する浮遊粒子状物質の内、微小粒子の質量濃度の測定に用いる試料採取装置、つまり基準サンプラの構成等が示されている。
【0005】
ここで、FRM法による測定法について簡単に説明する。FRM法による測定法は、大気採取装置(サンプラ)により、フィルタ上に浮遊粒子状物質を採取し、その重量を精密天秤により秤量する。具体的には、FRM法による測定では、サンプラにより、分級装置で分級して、FPを24時間連続的にフィルタ上に採取する。その後、人手により、FPが採取されたフィルタをサンプラから取り出し、当該フィルタを実験室に持ち帰り、所定の条件下でコンディショニングを行った後、精密天秤による重量濃度の測定が行われている。なお、採取が終わった後、つまりサンプラからFPが採取されたフィルタが取り出された後は、サンプラ本体に別のフィルタ、つまりFPが採取されていない新たなフィルタがセットされ、粒子状物質の採取を引き続き行う。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】日本工業規格 JIS K 8851(2008年)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記した非特許文献1に記載のサンプラは、以下のような問題があった。例えば、上記サンプラを用いて、微小粒子の重量濃度の日平均値の測定を目的とする場合を仮に想定する。この場合、ある期間(例えば1ヶ月間)、決められた時刻に毎日フィルタ交換をする必要が生じる。具体的には、例えば、日データを取るために24時間の開始時刻を午前0時となければならない。そして、次回フィルタ交換の時間は24時間後の翌午前0時となるので、夜間にフィルタ交換を行わなければならない。すなわち、上記サンプラにおいて、正確な測定を行うためには、毎日必ず決められた時刻(上述の例であると午前0時)にフィルタ交換をしなければならず、手間がかかり、煩わしいといった問題があった。
【0008】
本発明は、このような事情に鑑みてなされたものであり、その目的とするところは、簡易な構成で、フィルタ交換の煩わしさを解消することができる浮遊粒子状物質の採取装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、以下の構成を採用した。すなわち、第1の発明は、浮遊粒子状物質を含む試料大気を吸引し当該試料大気から浮遊粒子状物質を採取する浮遊粒子状物質の採取装置である。上記浮遊粒子状物質の採取装置は、上記試料大気中に含まれる浮遊粒子状物質のうち粒径が予め定められた値以下である微小粒子を含む浮遊粒子状物質含有空気を得る少なくとも1つ以上の分級手段と、上記浮遊粒子状物質含有空気から上記微小粒子を採取する複数の採取手段と、上記浮遊粒子状物質を含む試料大気を吸引するための吸引手段と、上記吸引手段によって吸引される上記試料大気の流量を調節する流量制御手段と、上記浮遊粒子状物質含有空気中の上記微小粒子が、予め定められたタイミングで異なる上記採取手段によって採取されるように上記試料大気の流れを選択的に切替える切替手段と、上記切替手段に切替指示を出力する切替制御手段とを備える。
【0010】
第2の発明は、上記第1の発明において、上記切替手段は、1つの上記分級手段から排出された上記浮遊粒子状物質含有空気が、つまり当該浮遊粒子状物質含有空気中の上記微小粒子が、第1の上記採取手段と第2の上記採取手段とによって交互に採取されるように、予め定められたタイミングで上記試料大気の流れを選択的に切替えることを特徴とする。
【0011】
第3の発明は、上記第1の発明において、上記切替手段は、上記浮遊粒子状物質含有空気が、つまり、上記浮遊粒子状物質含有空気中の上記微小粒子が、上記第1の上記分級手段に対応する第1の上記採取手段によって採取された後に、第2の上記分級手段に対応する第2の上記採取手段によって上記微小粒子が採取されるように、予め定められたタイミングで上記試料大気の流れを選択的に切替えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、微小粒子が採取されたフィルタ交換の煩わしさを解消することができる。
【図面の簡単な説明】
【0013】
【図1】第1の実施形態に係る採取装置1を示す図
【図2】第1の実施形態に係る採取装置1の変形例を示す図
【図3】第2の実施形態に係る採取装置3を示す図
【図4】第2の実施形態に係る採取装置3の変形例を示す図
【発明を実施するための形態】
【0014】
(第1の実施形態)
本発明の第1実施形態について、図面を参照しつつ説明する。図1は、本実施形態に係る浮遊粒子状物質の採取装置を示す図である。
【0015】
まず、第1の実施形態に係る浮遊粒子状物質の採取装置1の概要について簡単に説明する。なお、以下、浮遊粒子状物質の採取装置1を単に採取装置1と称することがある。
【0016】
第1の実施形態に係る採取装置1は、粒径が所定値以下である微小粒子と粒径が上記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち上記微小粒子をフィルタにより採取するものである。なお、微小粒子と粗大粒子の境界となる上記所定値は特に限定されるものではないが、例えば、2.5μmとされる。
【0017】
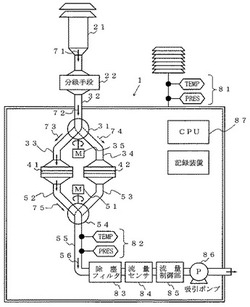
まず、サンプルインレット21から吸引された試料大気71は、分級手段22によって、浮遊粒子状物質含有空気72と粗大粒子含有空気(図示せず)とに分級される。次いで、浮遊粒子状物質含有空気72は、上流ライン32を通りAフィルタ41またはBフィルタ42へ導かれる。また、採取装置1には、上流回転バルブ31および下流回転バルブ54が備わっているので、浮遊粒子状物質含有空気72を何れか一方のフィルタに導くことができる。つまり、採取装置1には、上流回転バブル31および下流回転バルブ54が備わっているので、浮遊粒子状物質含有空気72に含まれる粒子状物質は、交互に、Aフィルタ41またはBフィルタ42上に採取されることになる。また、詳細は後述するが、上流回転バブル31および下流回転バルブ54にはモーター35、51が接続されており、また当該モーター35、51は予め定められた条件(例えば、24時間ごと)で駆動し、それに伴って上流回転バブル31および下流回転バルブ54も駆動し、何れか一方のフィルタ(具体的には、フィルタA41またはフィルタB42)上に粒子状物質が採取されることになる。そして、各フィルタによって微小粒子が採取された後の空気は、採取装置1の外に排出される。
【0018】
本実施形態に係る採取装置1は、浮遊粒子状物質含有空気72に含まれる粒子状物質を採取するフィルタを上流回転バルブ31および下流回転バルブ54によって予め定められた条件に従って自動的に切りかえることによって、切りかわってから後の時間にフィルタ交換をしに行けばよく、日データを取るために、午前0時にフィルタを取りに行く必要はない。
【0019】
なお、以下の説明において、浮遊粒子状物質含有空気72に含まれる微小粒子がAフィルタ41によって採取され、そして当該微小粒子が採取された後の空気が採取装置1の外に排出されるような流れを採取Aルートと称す。一方、浮遊粒子状物質含有空気72に含まれる微小粒子がBフィルタ42によって採取され、そして当該微小粒子が採取された後の空気が採取装置1の外に排出されるような流れを採取Bルートと称す。
【0020】
次に、第1の実施形態に係る採取装置1の構成について詳説する。図1に示すように、採取装置1は、分級手段22と、上流ライン32と、上流回転バルブ31と、上流Aライン33と、上流Bライン34と、Aフィルタ41と、Bフィルタ42と、下流回転バルブ54と、下流Aライン52と、下流Bライン53と、下流ライン55と、を備えている。
【0021】
なお、上述したように2つの採取ルートを区別するために、採取Aルート、採取Bルートと記載したので、採取装置1の構成についても、構成の名称は、採取ルートに対応する名称とした。つまり、上記採取Aルートに含まれる採取装置1における構成は、上流Aライン33と、Aフィルタ41と、下流Aライン52である。より具体的に説明すると、採取Aルートとは、上流ライン32を通る浮遊粒子状物質含有空気72が、当該上流ライン32からAフィルタ41に続く上流Aライン33に導かれ、Aフィルタ41によって微小粒子が採取された後の空気(以下、排出空気56と称す)が下流Aライン52から下流ライン55に導かれるルートのことである。同様に、採取Bルートについても同様の考え方で採取装置1の構成の名称を付与してある。
【0022】
分級手段22は、浮遊粒子状物質を含む試料大気71を吸引し、吸引した試料大気71中の浮遊粒子状物質を、例えば、分級比(質量基準)が50%となるような粒子の空気力学的粒径を閾値として、粒径が当該閾値以下の微小粒子と、粒径が当該閾値を超える粗大粒子とに分級する。上記閾値は特に限定されるものではないが、例えば、2.5μmとされる。なお、分級手段22の種類は特に限定されるものではないが、例えば、インパクタ或いはサイクロンを分級手段として採用した場合、粗大粒子はその多くが慣性衝突によって試料大気から除去され、これにより、粗大粒子の多くが除去された浮遊粒子状物質含有空気72を得る。また、バーチャルインパタを採用した場合には、分級手段22は、上記閾値を超える粒子を分級比で50%以上の割合(質量割合)で含む粗大粒子含有空気と、上記閾値以下の粒子を分級比で50%以上の割合(質量割合)で含む浮遊粒子状物質含有空気72とに分ける。これによって、分級手段22は、サンプルインレット21で吸引される試料大気71に含まれる浮遊粒子状物質を分級することができる。なお、分級手段22における吸引力は、図1に示すように、例えば、Aフィルタ41およびBフィルタ42よりも下流側に設けられた吸引ポンプ86で発生させればよい。また、当該吸引ポンプ86の吸引力は、後述するCPU87または流量制御部85によって制御される。
【0023】
なお、分級手段22には、図1に示すように、浮遊粒子状物質含有空気72をAフィルタ41およびBフィルタ42に導く上流ライン32が接続されている。
【0024】
上流回転バルブ31は、浮遊粒子状物質含有空気72をフィルタA41およびフィルタB42に交互に送り込むために、上流ライン32を、フィルタA41に続く上流ラインA33またはフィルタB42に続く上流Bライン34に切替える。
【0025】
具体的には、図1に示すように、上流回転バルブ31によって、上流ライン32が、Aフィルタ41に続く上流Aライン33に接続された場合、上流ライン32を通る浮遊粒子状物質含有空気72は、当該上流ライン32から上流Aライン33に導かれる(図1に示した矢印73)。一方、図1に示すように、上流回転バルブ31によって、上流ライン32が、Bフィルタ42に続く上流Bライン34(図1に示した矢印74方向)に接続された場合、上流ライン32を通る浮遊粒子状物質含有空気72は、当該上流ライン32から上流Bライン34に導かれる。
【0026】
Aフィルタ41は、浮遊粒子状物質含有空気72から微小粒子を採取するものである。また、Aフィルタ41は、フッ化炭素系樹脂で構成されるものが好ましく、浮遊粒子状物質含有空気72から微粒子を採取できるものであればよい。具体的には、粒子捕集効率は、0.3μmの粒子の捕集効率が99.7%以上のものであり、吸湿率及びガス吸着が0.01%以下のものである。なお、Bフィルタ42についても同様である。
【0027】
また、図1に示すように、Aフィルタ41には下流Aライン52が、Bフィルタ42には下流Bライン53がそれぞれ接続されている。そして、排出空気56を採取装置1の外に排出するための下流ライン55に、上記下流Aライン52および上記下流Bライン53が交互に下流回転バルブ54によって接続される。なお、図1では、採取Aルートの例を示した。
【0028】
このように、上流回転バルブ31および下流回転バルブ54によって、どのラインに接続されるか否かによって、浮遊粒子状物質含有空気72に含まれる粒子状物質を採取するフィルタが異なることになる。なお、上流回転バルブ31および下流回転バルブ54は、上記採取Aルートおよび上記採取Bルートが形成されるように同期して駆動するようにすればよい。また、採取装置1は、上流回転バルブ31および下流回転バルブ54の何れか一方によって、上記採取Aルートおよび上記採取Bルートが形成されるようにしてもよい。
【0029】
なお、上述した上流回転バルブ31および下流回転バルブ54には、例えば、それぞれモーター35、51が備わっている。また、上流回転バルブ31は、上流ライン32中の空気が上流Aライン33または上流Bライン42に流れるように制御できるものであればよい。つまり、上流回転バルブ31は、上流ライン32を上流Aライン33または上流Bライン42に接続できるバルブであればよく、駆動方式(電動式、エア駆動式等)は問わず、周知のバルブを用いることができる。例えば、円筒形の弁箱の中で円板状の弁体が回転し、流れの方向に対する弁体の角度を変えて流れを調整するバタフライ弁、円球の一部が貫通したボールを回転させることによって開閉を行うボールバルブ等が挙げられる。また、同様に、下流回転バルブ31は、下流Aライン52または下流Bライン53中の空気が下流ライン55に流れるように制御できるものであればよい。
【0030】
また、上述した例では、上流回転バルブ31は、上流ライン32中を流れる浮遊粒子状物質含有空気72が上流Aライン33または上流Bライン42に流れるように制御する(言い換えると、流れを切替える)ものであった。しかしながら、上流ライン32中の浮遊粒子状物質含有空気72を送るラインの数、およびフィルタの数は、上述した例に限られない。例えば、採取装置1に、Aフィルタ41およびBフィルタ42の2つではなく、粒子状物質を採取するためのフィルタの数を増やしてもよい。より具体的に説明すると、例えば、採取装置1に粒子状物質を採取するためのフィルタの数を4つにしてもよい。つまり、採取装置1は、上記Aフィルタ41、BフィルタB42、に加え、例えば図示しないCフィルタの合計3つのフィルタを備えてもよい。この場合、上流回転バルブ31は、浮遊粒子状物質含有空気72をAフィルタ41、Bフィルタ42、Cフィルタの順に送り込むことができるように、上流ライン32を各フィルタに続くラインに切りかえ、浮遊粒子状物質含有空気72の流れを制御すればよい。また、下流回転バルブ54も各フィルタ(Aフィルタ41、Bフィルタ42、図示しないCフィルタ)のうち何れか1つのフィルタからの排出空気56が下流ライン55に流れるようにそれぞれのラインに接続し、当該排気空気56の流れを切替えればよい。
【0031】
つまり、大気中に浮遊する浮遊粒子状物質の内、微小粒子の質量濃度の測定に用いる試料採取装置を目的とする装置の設計の範囲内で、採取装置1において、フィルタを複数備え、図1に示した採取Aルートおよび採取Bルートだけではなく、さらに採取ルートを形成してもよい。
【0032】
なお、採取装置1には、図1に示すように大気測定手段81、排出空気測定手段82、防塵フィルタ83、流量センサ84、流量制御部85、CPU(中央処理装置)87等を備えてもよい。
【0033】
大気測定手段12は、分級手段21に吸引される前の大気の相対湿度、温度、および圧力を測定する。つまり、測定装置1の外部における大気の相対湿度、温度、および圧力(気圧)を測定する。大気測定手段12は、図1に示されているように、例えば、温度計、気圧センサである。
【0034】
混合空気測定手段29は、排出空気56の温度および圧力を測定する。排出空気測定手段12は、図1に示されているように、例えば、温度計、気圧センサである。
【0035】
防塵フィルタ83は、排出空気56に含まれる実質的に全ての浮遊粒子状物質を除去する。そして、排出空気56は、防塵フィルタ83によって清浄な空気となって採取装置1から装置外(大気に)排出される。
【0036】
流量センサ84、採取装置1から排出される排出空気56の流量を測定する。
【0037】
また、CPU87は、大気測定手段81によって測定された大気の相対湿度、温度および圧力、並びに、排出空気測定手段82によって測定された湿度、温度、および圧力に関する情報を取得する。そして、CPU87は、当該情報および流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、制御信号を流量制御部85に出力する。そして、排出空気56の流量は、流量制御部85(例えば、弁やバルブ等)によって制御される。なお、CPU87は、当該情報および流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、制御信号を吸引ポンプ86に出力し、排出空気56の流量を吸引ポンプ86によって制御してもよい。
【0038】
なお、CPU87は、湿度、温度、および圧力に関する情報および流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、制御信号を流量制御部85や吸引ポンプ86に出力したが、流量制御部85が所定の演算を行ってもよい。つまり、例えば、流量制御部85は、図示しない中央処理装置を有し、湿度、温度、および圧力に関する情報、流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、排出空気56の流量を制御してもよいし、制御信号を吸引ポンプ86に出力してもよい。
【0039】
なお、CPU87は、図示しない記憶部に記憶されている所定のプログラムを実行することにより、モーター35、51を制御する。例えば、装置1にAフィルタAおよびBフィルタ42の2つのフィルタが備わっている場合、CPU87は、24時間毎にモーター35、51を自動的に制御する。
【0040】
このように本実施形態の係る装置1によれば、微小粒子が採取されたフィルタ交換の煩わしさを解消することができる。ここで、より具体的な場面を想定して以下、説明する。例えば、粒子状物質の重量濃度の日平均値の測定を目的として、採取装置1を用いて大気中の粒子状物質を24時間連続的に一定期間採取する場合を仮に想定する。また、24時間の開始時刻は午前0時と仮に想定する。この場合、例えば、モーター35、51の駆動条件を24時間で1回駆動するように設定しておけば、粒子状物質が、採取Aルートで24時間採取され、(24時間後の)翌午前0時には、自動的に採取Bルートに切りかわって粒子状物質が当該採取Bルートで24時間採取されることになる。
【0041】
言い換えると、上記採取Aルート、上記採取Bルートのように各採取ルートが自動的に切りかわらなければ、粒子状物質を24時間連続的に一定期間採取する場合、決まった時刻(上述の例であると午前0時)に必ずフィルタを回収および交換をし、かつ採取ルートも人手で切りかえなければならない。すなわち、本実施形態に係る採取装置1のように、採取Aルートで24時間採取された後は、自動的に採取Bルートに切りかわって粒子状物質が当該採取Bルートで24時間採取されることになるので、Aフィルタ41の回収および交換は、採取Bルートで粒子状物質が採取されている間(採取Aルートでの採取が終了してから24時間以内)に行えば良いことになる。
【0042】
また、採取Bルートで24時間採取され、(24時間後の)翌午前0時には、自動的に採取Aルートに切りかわって粒子状物質が当該採取Bルートで24時間採取されることになるので、Bフィルタ42の回収および交換は、採取Aルートで採取される間に行えば良いことになる。したがって、毎日必ず同じ時刻(上述の例であると午前0時)に微小粒子が採取されたフィルタ交換しなければならないといった、フィルタ交換の煩わしさを解消することができる。
【0043】
なお、一例として、微小粒子を採取Aルートおよび採取Bルートにより採取する例を説明したが、採取Aルートおよび採取Bルートだけではなく、さらに採取ルートがあってもよいことを上述した。例えば、採取Aルートおよび採取Bルートに加え、採取Cルートがあった場合、採取Aルートで24時間採取された後は、自動的に採取Bルートに切りかわって粒子状物質が当該採取Bルートで24時間採取され、さらに24時間後には採取ルートCで粒子状物質が採取されることになる。すなわち、採取AルートにおけるAフィルタ41の回収および交換は、採取Bルートおよび採取Cルートで粒子状物質が採取される間(採取ルートAでの採取が終了してから48時間以内)に行えば良いことになる。
【0044】
さらに、一例として、モーター35、51の駆動条件を24時間で1回駆動するように設定した場合を例に説明したが、モーター35、51の駆動条件は、24時間に限られないことは言うまでもない。つまり、12時間ごとに微小粒子を採取したい場合は、モーター35、51の駆動条件を12時間に設定すればよいように、所望の条件に設定すればよい。
【0045】
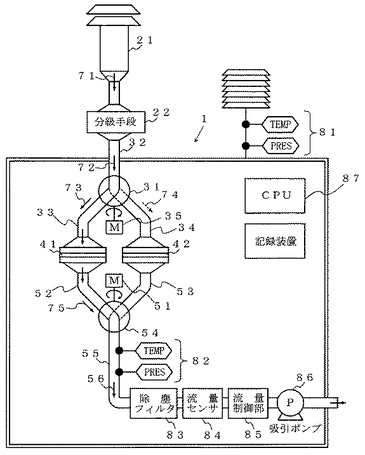
なお、上述した第1の実施形態に係る採取装置1では、ラインは上流回転バルブ35および下流回転バブル54によって切りかわる態様を説明したが、電磁弁を用いても上述した採取装置1を実現できる。以下、図2を参照しつつ、第1の実施形態に係る採取装置1の変形例を説明する。図2は、第1の実施形態の変形例に係る採取装置2を示す図である。なお、図1と同様の構成については、同一の参照符号を付してその説明を省略する。
【0046】
図2に示すように、採取装置2の分級手段22には、浮遊粒子状物質含有空気72を直接Aフィルタ41およびBフィルタ42に導けるように、2つに分岐した上流ライン36が接続されている。また、Aフィルタ41およびBフィルタ42には、当該各フィルタによって微小粒子が採取された後の空気(排出空気56)を採取装置2の外に排出できるように、2つに分岐した下流ライン37が接続されている。
【0047】
そして、図2に示すように、Aフィルタ41の上流側に電磁弁(上流A電磁弁62)62、下流側に電磁弁(下流A電磁弁64)が備わっている。同様に、Bフィルタ42の上流側に電磁弁(上流B電磁弁66)、下流側に電磁弁(下流B電磁弁68)が備わっている。なお、各電磁弁62、64、66、68にはそれぞれモーター61、63、65、67が備わっており、当該各モーターによって各電磁弁の開閉が行われる。また、各モーターは予め定められた条件で駆動し、それに伴って各電磁弁の開閉が行われる。
【0048】
このようにしても、採取装置2において、上述した第1の実施形態に係る採取装置1と同様の効果を実現することができる。つまり、Aフィルタ41の上流A電磁弁62と下流A電磁弁64とを開にして、Bフィルタ42の上流B電磁弁62と下流B電磁弁64とを閉にすれば、上述した第1の実施形態に係る採取装置1のような採取Aルートが形成されることになる。同様に、Aフィルタ41の上流A電磁弁62と下流A電磁弁64とを閉にして、Bフィルタ42の上流B電磁弁62と下流B電磁弁64とを開にすれば、上述した第1の実施形態に係る採取装置1のような採取Bルートが形成されることになる。
【0049】
なお、上流ライン36および下流ライン37は、上述したようなそれぞれ2つに分岐したラインに限られず、複数に分岐したラインを用いてもよい。そして、分岐した数に応じたフィルタ、電磁弁、およびモーターを備えることにより、採取Aルートおよび採取Bルートだけではなく、さらに採取ルートを形成することができる。
【0050】
(第2の実施形態)
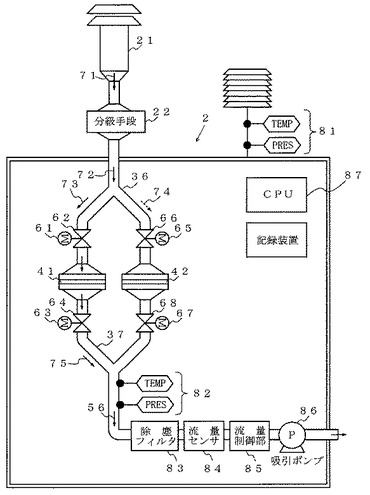
次に、本発明の第2実施形態について、図面を参照しつつ説明する。図3は、本実施形態に係る浮遊粒子状物質採取装置3(以下、単に採取装置3と称すことがある)を示す図である。また、第1実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。なお、第2の実施形態に係る採取装置3において、上述の第1の実施形態と異なる点は以下の通りである。
【0051】
図3に示すように、第2の実施形態に係る採取装置3は、第1の実施形態に係る採取装置1と異なり、分級手段を複数備えている(例えば、図3に示すようにA分級手段24およびB分級手段26)。具体的には、A分級手段24には、浮遊粒子状物質含有空気72をAフィルタ41に直接導くための上流Aライン38が接続されている。また、B分級手段26には、浮遊粒子状物質含有空気72をBフィルタ42に直接導くための上流Bライン39が接続されている。つまり、図3に示すように、第2の実施形態に係る採取装置3は、上述した第1の実施形態と異なり、浮遊粒子状物質含有空気72をAフィルタ41およびBフィルタ42の何れか一方に送り込むための上流回転バルブ31を備えていない(図1参照)。なお、他の構成は、上述した第1の実施形態に係る採取装置1と同様である。
【0052】
また、図3に示すように、第2の実施形態に係る採取装置3おいても、Aフィルタ41には下流Aライン52が、Bフィルタ42には下流Bライン53がそれぞれ接続されている。そして、各フィルタによって微小粒子が採取された後の空気(つまり、排出空気56)を採取装置3の外に排出するための下流ライン55に、下流Aライン52および下流Bライン53の何れか一方が下流回転バルブ54によって予め定められた条件で自動的に接続されることになる。
【0053】
また、採取装置3の構成についても、構成の名称は、採取ルートに対応する名称としている。つまり、採取Aルートに含まれる採取装置3における構成は、A分級手段24と、上流Aライン38と、Aフィルタ41と、下流Aライン52である。より具体的に説明すると、採取Aルートとは、上流Aライン38を通る浮遊粒子状物質含有空気72が、当該上流Aライン38からAフィルタ41に直接導かれ、Aフィルタ41によって微小粒子が採取された後の空気(排出空気56)が下流Aライン52から下流ライン55に導かれるルートのことである。同様に、採取Bルートについても同様の考え方で採取装置3の構成の名称を付与してある。
【0054】
例えば、下流回転バルブ54によって、下流ライン55が下流Aライン52に接続されていた場合、A分級手段24によって分級された浮遊粒子状物質含有空気72は、当該A分級手段24に接続された上流Aライン38によって、Aフィルタ41に直接導かれる。一方、下流回転バルブ54によって、下流ライン55が下流Bライン53に接続されていた場合、B分級手段26によって分級された浮遊粒子状物質含有空気72は、当該B分級手段26に接続された下流Bライン53によって、Bフィルタ42に直接導かれる。つまり、第2の実施形態に係る採取装置3は、下流回転バルブ54がどのラインに接続されるか否かに浮遊粒子状物質含有空気72に含まれる粒子状物質を採取するフィルタが異なることになる。なお、図3では、採取Aルートの例を示した。
【0055】
なお、大気中に浮遊する浮遊粒子状物質の内、微小粒子の質量濃度の測定に用いる試料採取装置を目的とする装置の設計の範囲内で、採取装置3において、分級手段および当該分級手段に対応するフィルタおよびラインを複数備え、採取Aルート、および採取Bルートだけではなく、さらに採取ルートがあってもよい。この場合、下流回転バルブ54は、各フィルタのうち何れか1つのフィルタからの排出空気56を装置外に排出できるように、当該各フィルタからのラインを下流ライン55に接続できるような構成にすればよい。
【0056】
以上説明したように、第2の実施形態に係る採取装置3によっても、上述した第1の実施形態に係る採取装置1と同様の効果を実現することができる。さらに、第2の実施形態に係る採取装置3は、浮遊粒子状物質含有空気72を分級手段から直接フィルタに導く。言い換えると、第2の実施形態に係る採取装置3は、上述した第1の実施形態に係る採取装置1
のように、分級手段からフィルタまでの間に、上流回転バルブや電磁弁が備わっていない。従って、第2の実施形態に係る採取装置3においては、上流回転バルブや電磁弁に浮遊粒子状物質含有空気72に含まれる粒子状物質が付着することを防ぐことができる。その結果、浮遊粒子状物質含有空気72に含まれる粒子状物質をロスすることなく、各フィルタ上に採取することが可能となる。
【0057】
なお、上述した第2の実施形態に係る採取装置3では、ラインは下流回転バブル54によって切りかわる態様を説明したが、電磁弁を用いても上述した採取装置3を実現できる。以下、図4を参照しつつ、第2の実施形態に係る採取装置3の変形例を説明する。図4は、第2の実施形態の変形例に係る採取装置4を示す図である。なお、図3と同様の構成については、同一の参照符号を付してその説明を省略する。
【0058】
図4に示すように、Aフィルタ41およびBフィルタ42には、当該各フィルタによって微小粒子が採取された後の空気(排出空気56)を採取装置4の外に排出できるように、2つに分岐した下流ライン37が接続されている。
【0059】
そして、図4に示すように、Aフィルタ41の下流側に電磁弁(下流A電磁弁64)、Bフィルタ42の下流側に電磁弁(下流B電磁弁68)が備わっている。なお、各電磁弁64、68にはそれぞれモーター63、67が備わっており、当該各モーターによって各電磁弁の開閉が行われる。また、各モーターは予め定められた条件で駆動し、それに伴って各電磁弁の開閉が行われる。
【0060】
このようにしても、採取装置4において、上述した第2の実施形態に係る採取装置3と同様の効果を実現することができる。なお、下流ライン37は、上述したようなそれぞれ2つに分岐したラインに限られず、複数に分岐したラインを用いてもよい。そして、分岐した数に応じたフィルタ、電磁弁、およびモーターを備えることにより、採取Aルートおよび採取Bルートだけではなく、さらに採取ルートを形成することができる。
【0061】
以上、本発明を詳細に説明してきたが、上述の説明はあらゆる点において本発明の一例にすぎず、その範囲を限定しようとするものではない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。
【産業上の利用可能性】
【0062】
本発明にかかる粒子状物質の採取装置は、簡易な構成で、フィルタ交換の煩わしさを解消することができる、人の健康に影響の大きい微小浮遊粒子状物質の採取装置等に有用である。
【符号の説明】
【0063】
1、2、3、4…採取装置
22…分級手段
24…A分級手段
26…B分級手段
32…上流ライン
33、39…上流Aライン
34、39…上流Bライン
31…上流回転バルブ
62…上流A電磁弁
66…上流B電磁弁
41…Aフィルタ
42…Bフィルタ
54…下流回転バルブ
64…下流A電磁弁
68…下流B電磁弁
37、55…下流ライン
52…下流Aライン
53…下流Bライン
85…流量制御部
86…吸引ポンプ
87…CPU
【技術分野】
【0001】
本発明は、浮遊粒子状物質の採取装置に関し、より詳しくは、特に人の健康に影響の大きい浮遊粒子状物質の採取装置に関する。
【背景技術】
【0002】
大気中には、種々の粒径の浮遊粒子状物質(SPM:Suspended Particulate Matter)が存在する。浮遊粒子状物質は、その大きさが微小なため、人が呼吸するに際し、気道で濾過されずに、吸引され、肺に沈降することから、特に人に対する毒性が高い。近年、浮遊粒子状物質が、人の健康に強い影響を及ぼすことが様々報告され、高い関心が持たれている。
【0003】
例えば、米国では、浮遊粒子状物質の標準測定方法(Federal Register Vol.62, No.138/Appendix L:略称FRM法、以下、単にFMR法と称す)が制定されており、非常に多くの実験データが蓄積され、特に疫学用データとして有用性が高いものとなっている。なお、一般的に、大気中の浮遊粒子状物質は、粒径2.5μm程度を境として粗大粒子(coarse particle,以下CPと略すことがある)と微小粒子(fine particle,以下FPと略すことがある)とに区切られている。
【0004】
なお、非特許文献1には、上記FRM法に基づいて、大気中に浮遊する浮遊粒子状物質の内、微小粒子の質量濃度の測定に用いる試料採取装置、つまり基準サンプラの構成等が示されている。
【0005】
ここで、FRM法による測定法について簡単に説明する。FRM法による測定法は、大気採取装置(サンプラ)により、フィルタ上に浮遊粒子状物質を採取し、その重量を精密天秤により秤量する。具体的には、FRM法による測定では、サンプラにより、分級装置で分級して、FPを24時間連続的にフィルタ上に採取する。その後、人手により、FPが採取されたフィルタをサンプラから取り出し、当該フィルタを実験室に持ち帰り、所定の条件下でコンディショニングを行った後、精密天秤による重量濃度の測定が行われている。なお、採取が終わった後、つまりサンプラからFPが採取されたフィルタが取り出された後は、サンプラ本体に別のフィルタ、つまりFPが採取されていない新たなフィルタがセットされ、粒子状物質の採取を引き続き行う。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】日本工業規格 JIS K 8851(2008年)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記した非特許文献1に記載のサンプラは、以下のような問題があった。例えば、上記サンプラを用いて、微小粒子の重量濃度の日平均値の測定を目的とする場合を仮に想定する。この場合、ある期間(例えば1ヶ月間)、決められた時刻に毎日フィルタ交換をする必要が生じる。具体的には、例えば、日データを取るために24時間の開始時刻を午前0時となければならない。そして、次回フィルタ交換の時間は24時間後の翌午前0時となるので、夜間にフィルタ交換を行わなければならない。すなわち、上記サンプラにおいて、正確な測定を行うためには、毎日必ず決められた時刻(上述の例であると午前0時)にフィルタ交換をしなければならず、手間がかかり、煩わしいといった問題があった。
【0008】
本発明は、このような事情に鑑みてなされたものであり、その目的とするところは、簡易な構成で、フィルタ交換の煩わしさを解消することができる浮遊粒子状物質の採取装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、以下の構成を採用した。すなわち、第1の発明は、浮遊粒子状物質を含む試料大気を吸引し当該試料大気から浮遊粒子状物質を採取する浮遊粒子状物質の採取装置である。上記浮遊粒子状物質の採取装置は、上記試料大気中に含まれる浮遊粒子状物質のうち粒径が予め定められた値以下である微小粒子を含む浮遊粒子状物質含有空気を得る少なくとも1つ以上の分級手段と、上記浮遊粒子状物質含有空気から上記微小粒子を採取する複数の採取手段と、上記浮遊粒子状物質を含む試料大気を吸引するための吸引手段と、上記吸引手段によって吸引される上記試料大気の流量を調節する流量制御手段と、上記浮遊粒子状物質含有空気中の上記微小粒子が、予め定められたタイミングで異なる上記採取手段によって採取されるように上記試料大気の流れを選択的に切替える切替手段と、上記切替手段に切替指示を出力する切替制御手段とを備える。
【0010】
第2の発明は、上記第1の発明において、上記切替手段は、1つの上記分級手段から排出された上記浮遊粒子状物質含有空気が、つまり当該浮遊粒子状物質含有空気中の上記微小粒子が、第1の上記採取手段と第2の上記採取手段とによって交互に採取されるように、予め定められたタイミングで上記試料大気の流れを選択的に切替えることを特徴とする。
【0011】
第3の発明は、上記第1の発明において、上記切替手段は、上記浮遊粒子状物質含有空気が、つまり、上記浮遊粒子状物質含有空気中の上記微小粒子が、上記第1の上記分級手段に対応する第1の上記採取手段によって採取された後に、第2の上記分級手段に対応する第2の上記採取手段によって上記微小粒子が採取されるように、予め定められたタイミングで上記試料大気の流れを選択的に切替えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、微小粒子が採取されたフィルタ交換の煩わしさを解消することができる。
【図面の簡単な説明】
【0013】
【図1】第1の実施形態に係る採取装置1を示す図
【図2】第1の実施形態に係る採取装置1の変形例を示す図
【図3】第2の実施形態に係る採取装置3を示す図
【図4】第2の実施形態に係る採取装置3の変形例を示す図
【発明を実施するための形態】
【0014】
(第1の実施形態)
本発明の第1実施形態について、図面を参照しつつ説明する。図1は、本実施形態に係る浮遊粒子状物質の採取装置を示す図である。
【0015】
まず、第1の実施形態に係る浮遊粒子状物質の採取装置1の概要について簡単に説明する。なお、以下、浮遊粒子状物質の採取装置1を単に採取装置1と称することがある。
【0016】
第1の実施形態に係る採取装置1は、粒径が所定値以下である微小粒子と粒径が上記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち上記微小粒子をフィルタにより採取するものである。なお、微小粒子と粗大粒子の境界となる上記所定値は特に限定されるものではないが、例えば、2.5μmとされる。
【0017】
まず、サンプルインレット21から吸引された試料大気71は、分級手段22によって、浮遊粒子状物質含有空気72と粗大粒子含有空気(図示せず)とに分級される。次いで、浮遊粒子状物質含有空気72は、上流ライン32を通りAフィルタ41またはBフィルタ42へ導かれる。また、採取装置1には、上流回転バルブ31および下流回転バルブ54が備わっているので、浮遊粒子状物質含有空気72を何れか一方のフィルタに導くことができる。つまり、採取装置1には、上流回転バブル31および下流回転バルブ54が備わっているので、浮遊粒子状物質含有空気72に含まれる粒子状物質は、交互に、Aフィルタ41またはBフィルタ42上に採取されることになる。また、詳細は後述するが、上流回転バブル31および下流回転バルブ54にはモーター35、51が接続されており、また当該モーター35、51は予め定められた条件(例えば、24時間ごと)で駆動し、それに伴って上流回転バブル31および下流回転バルブ54も駆動し、何れか一方のフィルタ(具体的には、フィルタA41またはフィルタB42)上に粒子状物質が採取されることになる。そして、各フィルタによって微小粒子が採取された後の空気は、採取装置1の外に排出される。
【0018】
本実施形態に係る採取装置1は、浮遊粒子状物質含有空気72に含まれる粒子状物質を採取するフィルタを上流回転バルブ31および下流回転バルブ54によって予め定められた条件に従って自動的に切りかえることによって、切りかわってから後の時間にフィルタ交換をしに行けばよく、日データを取るために、午前0時にフィルタを取りに行く必要はない。
【0019】
なお、以下の説明において、浮遊粒子状物質含有空気72に含まれる微小粒子がAフィルタ41によって採取され、そして当該微小粒子が採取された後の空気が採取装置1の外に排出されるような流れを採取Aルートと称す。一方、浮遊粒子状物質含有空気72に含まれる微小粒子がBフィルタ42によって採取され、そして当該微小粒子が採取された後の空気が採取装置1の外に排出されるような流れを採取Bルートと称す。
【0020】
次に、第1の実施形態に係る採取装置1の構成について詳説する。図1に示すように、採取装置1は、分級手段22と、上流ライン32と、上流回転バルブ31と、上流Aライン33と、上流Bライン34と、Aフィルタ41と、Bフィルタ42と、下流回転バルブ54と、下流Aライン52と、下流Bライン53と、下流ライン55と、を備えている。
【0021】
なお、上述したように2つの採取ルートを区別するために、採取Aルート、採取Bルートと記載したので、採取装置1の構成についても、構成の名称は、採取ルートに対応する名称とした。つまり、上記採取Aルートに含まれる採取装置1における構成は、上流Aライン33と、Aフィルタ41と、下流Aライン52である。より具体的に説明すると、採取Aルートとは、上流ライン32を通る浮遊粒子状物質含有空気72が、当該上流ライン32からAフィルタ41に続く上流Aライン33に導かれ、Aフィルタ41によって微小粒子が採取された後の空気(以下、排出空気56と称す)が下流Aライン52から下流ライン55に導かれるルートのことである。同様に、採取Bルートについても同様の考え方で採取装置1の構成の名称を付与してある。
【0022】
分級手段22は、浮遊粒子状物質を含む試料大気71を吸引し、吸引した試料大気71中の浮遊粒子状物質を、例えば、分級比(質量基準)が50%となるような粒子の空気力学的粒径を閾値として、粒径が当該閾値以下の微小粒子と、粒径が当該閾値を超える粗大粒子とに分級する。上記閾値は特に限定されるものではないが、例えば、2.5μmとされる。なお、分級手段22の種類は特に限定されるものではないが、例えば、インパクタ或いはサイクロンを分級手段として採用した場合、粗大粒子はその多くが慣性衝突によって試料大気から除去され、これにより、粗大粒子の多くが除去された浮遊粒子状物質含有空気72を得る。また、バーチャルインパタを採用した場合には、分級手段22は、上記閾値を超える粒子を分級比で50%以上の割合(質量割合)で含む粗大粒子含有空気と、上記閾値以下の粒子を分級比で50%以上の割合(質量割合)で含む浮遊粒子状物質含有空気72とに分ける。これによって、分級手段22は、サンプルインレット21で吸引される試料大気71に含まれる浮遊粒子状物質を分級することができる。なお、分級手段22における吸引力は、図1に示すように、例えば、Aフィルタ41およびBフィルタ42よりも下流側に設けられた吸引ポンプ86で発生させればよい。また、当該吸引ポンプ86の吸引力は、後述するCPU87または流量制御部85によって制御される。
【0023】
なお、分級手段22には、図1に示すように、浮遊粒子状物質含有空気72をAフィルタ41およびBフィルタ42に導く上流ライン32が接続されている。
【0024】
上流回転バルブ31は、浮遊粒子状物質含有空気72をフィルタA41およびフィルタB42に交互に送り込むために、上流ライン32を、フィルタA41に続く上流ラインA33またはフィルタB42に続く上流Bライン34に切替える。
【0025】
具体的には、図1に示すように、上流回転バルブ31によって、上流ライン32が、Aフィルタ41に続く上流Aライン33に接続された場合、上流ライン32を通る浮遊粒子状物質含有空気72は、当該上流ライン32から上流Aライン33に導かれる(図1に示した矢印73)。一方、図1に示すように、上流回転バルブ31によって、上流ライン32が、Bフィルタ42に続く上流Bライン34(図1に示した矢印74方向)に接続された場合、上流ライン32を通る浮遊粒子状物質含有空気72は、当該上流ライン32から上流Bライン34に導かれる。
【0026】
Aフィルタ41は、浮遊粒子状物質含有空気72から微小粒子を採取するものである。また、Aフィルタ41は、フッ化炭素系樹脂で構成されるものが好ましく、浮遊粒子状物質含有空気72から微粒子を採取できるものであればよい。具体的には、粒子捕集効率は、0.3μmの粒子の捕集効率が99.7%以上のものであり、吸湿率及びガス吸着が0.01%以下のものである。なお、Bフィルタ42についても同様である。
【0027】
また、図1に示すように、Aフィルタ41には下流Aライン52が、Bフィルタ42には下流Bライン53がそれぞれ接続されている。そして、排出空気56を採取装置1の外に排出するための下流ライン55に、上記下流Aライン52および上記下流Bライン53が交互に下流回転バルブ54によって接続される。なお、図1では、採取Aルートの例を示した。
【0028】
このように、上流回転バルブ31および下流回転バルブ54によって、どのラインに接続されるか否かによって、浮遊粒子状物質含有空気72に含まれる粒子状物質を採取するフィルタが異なることになる。なお、上流回転バルブ31および下流回転バルブ54は、上記採取Aルートおよび上記採取Bルートが形成されるように同期して駆動するようにすればよい。また、採取装置1は、上流回転バルブ31および下流回転バルブ54の何れか一方によって、上記採取Aルートおよび上記採取Bルートが形成されるようにしてもよい。
【0029】
なお、上述した上流回転バルブ31および下流回転バルブ54には、例えば、それぞれモーター35、51が備わっている。また、上流回転バルブ31は、上流ライン32中の空気が上流Aライン33または上流Bライン42に流れるように制御できるものであればよい。つまり、上流回転バルブ31は、上流ライン32を上流Aライン33または上流Bライン42に接続できるバルブであればよく、駆動方式(電動式、エア駆動式等)は問わず、周知のバルブを用いることができる。例えば、円筒形の弁箱の中で円板状の弁体が回転し、流れの方向に対する弁体の角度を変えて流れを調整するバタフライ弁、円球の一部が貫通したボールを回転させることによって開閉を行うボールバルブ等が挙げられる。また、同様に、下流回転バルブ31は、下流Aライン52または下流Bライン53中の空気が下流ライン55に流れるように制御できるものであればよい。
【0030】
また、上述した例では、上流回転バルブ31は、上流ライン32中を流れる浮遊粒子状物質含有空気72が上流Aライン33または上流Bライン42に流れるように制御する(言い換えると、流れを切替える)ものであった。しかしながら、上流ライン32中の浮遊粒子状物質含有空気72を送るラインの数、およびフィルタの数は、上述した例に限られない。例えば、採取装置1に、Aフィルタ41およびBフィルタ42の2つではなく、粒子状物質を採取するためのフィルタの数を増やしてもよい。より具体的に説明すると、例えば、採取装置1に粒子状物質を採取するためのフィルタの数を4つにしてもよい。つまり、採取装置1は、上記Aフィルタ41、BフィルタB42、に加え、例えば図示しないCフィルタの合計3つのフィルタを備えてもよい。この場合、上流回転バルブ31は、浮遊粒子状物質含有空気72をAフィルタ41、Bフィルタ42、Cフィルタの順に送り込むことができるように、上流ライン32を各フィルタに続くラインに切りかえ、浮遊粒子状物質含有空気72の流れを制御すればよい。また、下流回転バルブ54も各フィルタ(Aフィルタ41、Bフィルタ42、図示しないCフィルタ)のうち何れか1つのフィルタからの排出空気56が下流ライン55に流れるようにそれぞれのラインに接続し、当該排気空気56の流れを切替えればよい。
【0031】
つまり、大気中に浮遊する浮遊粒子状物質の内、微小粒子の質量濃度の測定に用いる試料採取装置を目的とする装置の設計の範囲内で、採取装置1において、フィルタを複数備え、図1に示した採取Aルートおよび採取Bルートだけではなく、さらに採取ルートを形成してもよい。
【0032】
なお、採取装置1には、図1に示すように大気測定手段81、排出空気測定手段82、防塵フィルタ83、流量センサ84、流量制御部85、CPU(中央処理装置)87等を備えてもよい。
【0033】
大気測定手段12は、分級手段21に吸引される前の大気の相対湿度、温度、および圧力を測定する。つまり、測定装置1の外部における大気の相対湿度、温度、および圧力(気圧)を測定する。大気測定手段12は、図1に示されているように、例えば、温度計、気圧センサである。
【0034】
混合空気測定手段29は、排出空気56の温度および圧力を測定する。排出空気測定手段12は、図1に示されているように、例えば、温度計、気圧センサである。
【0035】
防塵フィルタ83は、排出空気56に含まれる実質的に全ての浮遊粒子状物質を除去する。そして、排出空気56は、防塵フィルタ83によって清浄な空気となって採取装置1から装置外(大気に)排出される。
【0036】
流量センサ84、採取装置1から排出される排出空気56の流量を測定する。
【0037】
また、CPU87は、大気測定手段81によって測定された大気の相対湿度、温度および圧力、並びに、排出空気測定手段82によって測定された湿度、温度、および圧力に関する情報を取得する。そして、CPU87は、当該情報および流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、制御信号を流量制御部85に出力する。そして、排出空気56の流量は、流量制御部85(例えば、弁やバルブ等)によって制御される。なお、CPU87は、当該情報および流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、制御信号を吸引ポンプ86に出力し、排出空気56の流量を吸引ポンプ86によって制御してもよい。
【0038】
なお、CPU87は、湿度、温度、および圧力に関する情報および流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、制御信号を流量制御部85や吸引ポンプ86に出力したが、流量制御部85が所定の演算を行ってもよい。つまり、例えば、流量制御部85は、図示しない中央処理装置を有し、湿度、温度、および圧力に関する情報、流量センサ84から得られる排出空気56の流量に関する情報に基づいて所定の演算を行い、排出空気56の流量を制御してもよいし、制御信号を吸引ポンプ86に出力してもよい。
【0039】
なお、CPU87は、図示しない記憶部に記憶されている所定のプログラムを実行することにより、モーター35、51を制御する。例えば、装置1にAフィルタAおよびBフィルタ42の2つのフィルタが備わっている場合、CPU87は、24時間毎にモーター35、51を自動的に制御する。
【0040】
このように本実施形態の係る装置1によれば、微小粒子が採取されたフィルタ交換の煩わしさを解消することができる。ここで、より具体的な場面を想定して以下、説明する。例えば、粒子状物質の重量濃度の日平均値の測定を目的として、採取装置1を用いて大気中の粒子状物質を24時間連続的に一定期間採取する場合を仮に想定する。また、24時間の開始時刻は午前0時と仮に想定する。この場合、例えば、モーター35、51の駆動条件を24時間で1回駆動するように設定しておけば、粒子状物質が、採取Aルートで24時間採取され、(24時間後の)翌午前0時には、自動的に採取Bルートに切りかわって粒子状物質が当該採取Bルートで24時間採取されることになる。
【0041】
言い換えると、上記採取Aルート、上記採取Bルートのように各採取ルートが自動的に切りかわらなければ、粒子状物質を24時間連続的に一定期間採取する場合、決まった時刻(上述の例であると午前0時)に必ずフィルタを回収および交換をし、かつ採取ルートも人手で切りかえなければならない。すなわち、本実施形態に係る採取装置1のように、採取Aルートで24時間採取された後は、自動的に採取Bルートに切りかわって粒子状物質が当該採取Bルートで24時間採取されることになるので、Aフィルタ41の回収および交換は、採取Bルートで粒子状物質が採取されている間(採取Aルートでの採取が終了してから24時間以内)に行えば良いことになる。
【0042】
また、採取Bルートで24時間採取され、(24時間後の)翌午前0時には、自動的に採取Aルートに切りかわって粒子状物質が当該採取Bルートで24時間採取されることになるので、Bフィルタ42の回収および交換は、採取Aルートで採取される間に行えば良いことになる。したがって、毎日必ず同じ時刻(上述の例であると午前0時)に微小粒子が採取されたフィルタ交換しなければならないといった、フィルタ交換の煩わしさを解消することができる。
【0043】
なお、一例として、微小粒子を採取Aルートおよび採取Bルートにより採取する例を説明したが、採取Aルートおよび採取Bルートだけではなく、さらに採取ルートがあってもよいことを上述した。例えば、採取Aルートおよび採取Bルートに加え、採取Cルートがあった場合、採取Aルートで24時間採取された後は、自動的に採取Bルートに切りかわって粒子状物質が当該採取Bルートで24時間採取され、さらに24時間後には採取ルートCで粒子状物質が採取されることになる。すなわち、採取AルートにおけるAフィルタ41の回収および交換は、採取Bルートおよび採取Cルートで粒子状物質が採取される間(採取ルートAでの採取が終了してから48時間以内)に行えば良いことになる。
【0044】
さらに、一例として、モーター35、51の駆動条件を24時間で1回駆動するように設定した場合を例に説明したが、モーター35、51の駆動条件は、24時間に限られないことは言うまでもない。つまり、12時間ごとに微小粒子を採取したい場合は、モーター35、51の駆動条件を12時間に設定すればよいように、所望の条件に設定すればよい。
【0045】
なお、上述した第1の実施形態に係る採取装置1では、ラインは上流回転バルブ35および下流回転バブル54によって切りかわる態様を説明したが、電磁弁を用いても上述した採取装置1を実現できる。以下、図2を参照しつつ、第1の実施形態に係る採取装置1の変形例を説明する。図2は、第1の実施形態の変形例に係る採取装置2を示す図である。なお、図1と同様の構成については、同一の参照符号を付してその説明を省略する。
【0046】
図2に示すように、採取装置2の分級手段22には、浮遊粒子状物質含有空気72を直接Aフィルタ41およびBフィルタ42に導けるように、2つに分岐した上流ライン36が接続されている。また、Aフィルタ41およびBフィルタ42には、当該各フィルタによって微小粒子が採取された後の空気(排出空気56)を採取装置2の外に排出できるように、2つに分岐した下流ライン37が接続されている。
【0047】
そして、図2に示すように、Aフィルタ41の上流側に電磁弁(上流A電磁弁62)62、下流側に電磁弁(下流A電磁弁64)が備わっている。同様に、Bフィルタ42の上流側に電磁弁(上流B電磁弁66)、下流側に電磁弁(下流B電磁弁68)が備わっている。なお、各電磁弁62、64、66、68にはそれぞれモーター61、63、65、67が備わっており、当該各モーターによって各電磁弁の開閉が行われる。また、各モーターは予め定められた条件で駆動し、それに伴って各電磁弁の開閉が行われる。
【0048】
このようにしても、採取装置2において、上述した第1の実施形態に係る採取装置1と同様の効果を実現することができる。つまり、Aフィルタ41の上流A電磁弁62と下流A電磁弁64とを開にして、Bフィルタ42の上流B電磁弁62と下流B電磁弁64とを閉にすれば、上述した第1の実施形態に係る採取装置1のような採取Aルートが形成されることになる。同様に、Aフィルタ41の上流A電磁弁62と下流A電磁弁64とを閉にして、Bフィルタ42の上流B電磁弁62と下流B電磁弁64とを開にすれば、上述した第1の実施形態に係る採取装置1のような採取Bルートが形成されることになる。
【0049】
なお、上流ライン36および下流ライン37は、上述したようなそれぞれ2つに分岐したラインに限られず、複数に分岐したラインを用いてもよい。そして、分岐した数に応じたフィルタ、電磁弁、およびモーターを備えることにより、採取Aルートおよび採取Bルートだけではなく、さらに採取ルートを形成することができる。
【0050】
(第2の実施形態)
次に、本発明の第2実施形態について、図面を参照しつつ説明する。図3は、本実施形態に係る浮遊粒子状物質採取装置3(以下、単に採取装置3と称すことがある)を示す図である。また、第1実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。なお、第2の実施形態に係る採取装置3において、上述の第1の実施形態と異なる点は以下の通りである。
【0051】
図3に示すように、第2の実施形態に係る採取装置3は、第1の実施形態に係る採取装置1と異なり、分級手段を複数備えている(例えば、図3に示すようにA分級手段24およびB分級手段26)。具体的には、A分級手段24には、浮遊粒子状物質含有空気72をAフィルタ41に直接導くための上流Aライン38が接続されている。また、B分級手段26には、浮遊粒子状物質含有空気72をBフィルタ42に直接導くための上流Bライン39が接続されている。つまり、図3に示すように、第2の実施形態に係る採取装置3は、上述した第1の実施形態と異なり、浮遊粒子状物質含有空気72をAフィルタ41およびBフィルタ42の何れか一方に送り込むための上流回転バルブ31を備えていない(図1参照)。なお、他の構成は、上述した第1の実施形態に係る採取装置1と同様である。
【0052】
また、図3に示すように、第2の実施形態に係る採取装置3おいても、Aフィルタ41には下流Aライン52が、Bフィルタ42には下流Bライン53がそれぞれ接続されている。そして、各フィルタによって微小粒子が採取された後の空気(つまり、排出空気56)を採取装置3の外に排出するための下流ライン55に、下流Aライン52および下流Bライン53の何れか一方が下流回転バルブ54によって予め定められた条件で自動的に接続されることになる。
【0053】
また、採取装置3の構成についても、構成の名称は、採取ルートに対応する名称としている。つまり、採取Aルートに含まれる採取装置3における構成は、A分級手段24と、上流Aライン38と、Aフィルタ41と、下流Aライン52である。より具体的に説明すると、採取Aルートとは、上流Aライン38を通る浮遊粒子状物質含有空気72が、当該上流Aライン38からAフィルタ41に直接導かれ、Aフィルタ41によって微小粒子が採取された後の空気(排出空気56)が下流Aライン52から下流ライン55に導かれるルートのことである。同様に、採取Bルートについても同様の考え方で採取装置3の構成の名称を付与してある。
【0054】
例えば、下流回転バルブ54によって、下流ライン55が下流Aライン52に接続されていた場合、A分級手段24によって分級された浮遊粒子状物質含有空気72は、当該A分級手段24に接続された上流Aライン38によって、Aフィルタ41に直接導かれる。一方、下流回転バルブ54によって、下流ライン55が下流Bライン53に接続されていた場合、B分級手段26によって分級された浮遊粒子状物質含有空気72は、当該B分級手段26に接続された下流Bライン53によって、Bフィルタ42に直接導かれる。つまり、第2の実施形態に係る採取装置3は、下流回転バルブ54がどのラインに接続されるか否かに浮遊粒子状物質含有空気72に含まれる粒子状物質を採取するフィルタが異なることになる。なお、図3では、採取Aルートの例を示した。
【0055】
なお、大気中に浮遊する浮遊粒子状物質の内、微小粒子の質量濃度の測定に用いる試料採取装置を目的とする装置の設計の範囲内で、採取装置3において、分級手段および当該分級手段に対応するフィルタおよびラインを複数備え、採取Aルート、および採取Bルートだけではなく、さらに採取ルートがあってもよい。この場合、下流回転バルブ54は、各フィルタのうち何れか1つのフィルタからの排出空気56を装置外に排出できるように、当該各フィルタからのラインを下流ライン55に接続できるような構成にすればよい。
【0056】
以上説明したように、第2の実施形態に係る採取装置3によっても、上述した第1の実施形態に係る採取装置1と同様の効果を実現することができる。さらに、第2の実施形態に係る採取装置3は、浮遊粒子状物質含有空気72を分級手段から直接フィルタに導く。言い換えると、第2の実施形態に係る採取装置3は、上述した第1の実施形態に係る採取装置1
のように、分級手段からフィルタまでの間に、上流回転バルブや電磁弁が備わっていない。従って、第2の実施形態に係る採取装置3においては、上流回転バルブや電磁弁に浮遊粒子状物質含有空気72に含まれる粒子状物質が付着することを防ぐことができる。その結果、浮遊粒子状物質含有空気72に含まれる粒子状物質をロスすることなく、各フィルタ上に採取することが可能となる。
【0057】
なお、上述した第2の実施形態に係る採取装置3では、ラインは下流回転バブル54によって切りかわる態様を説明したが、電磁弁を用いても上述した採取装置3を実現できる。以下、図4を参照しつつ、第2の実施形態に係る採取装置3の変形例を説明する。図4は、第2の実施形態の変形例に係る採取装置4を示す図である。なお、図3と同様の構成については、同一の参照符号を付してその説明を省略する。
【0058】
図4に示すように、Aフィルタ41およびBフィルタ42には、当該各フィルタによって微小粒子が採取された後の空気(排出空気56)を採取装置4の外に排出できるように、2つに分岐した下流ライン37が接続されている。
【0059】
そして、図4に示すように、Aフィルタ41の下流側に電磁弁(下流A電磁弁64)、Bフィルタ42の下流側に電磁弁(下流B電磁弁68)が備わっている。なお、各電磁弁64、68にはそれぞれモーター63、67が備わっており、当該各モーターによって各電磁弁の開閉が行われる。また、各モーターは予め定められた条件で駆動し、それに伴って各電磁弁の開閉が行われる。
【0060】
このようにしても、採取装置4において、上述した第2の実施形態に係る採取装置3と同様の効果を実現することができる。なお、下流ライン37は、上述したようなそれぞれ2つに分岐したラインに限られず、複数に分岐したラインを用いてもよい。そして、分岐した数に応じたフィルタ、電磁弁、およびモーターを備えることにより、採取Aルートおよび採取Bルートだけではなく、さらに採取ルートを形成することができる。
【0061】
以上、本発明を詳細に説明してきたが、上述の説明はあらゆる点において本発明の一例にすぎず、その範囲を限定しようとするものではない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。
【産業上の利用可能性】
【0062】
本発明にかかる粒子状物質の採取装置は、簡易な構成で、フィルタ交換の煩わしさを解消することができる、人の健康に影響の大きい微小浮遊粒子状物質の採取装置等に有用である。
【符号の説明】
【0063】
1、2、3、4…採取装置
22…分級手段
24…A分級手段
26…B分級手段
32…上流ライン
33、39…上流Aライン
34、39…上流Bライン
31…上流回転バルブ
62…上流A電磁弁
66…上流B電磁弁
41…Aフィルタ
42…Bフィルタ
54…下流回転バルブ
64…下流A電磁弁
68…下流B電磁弁
37、55…下流ライン
52…下流Aライン
53…下流Bライン
85…流量制御部
86…吸引ポンプ
87…CPU
【特許請求の範囲】
【請求項1】
浮遊粒子状物質を含む試料大気を吸引し当該試料大気から浮遊粒子状物質を採取する浮遊粒子状物質の採取装置であって、
前記試料大気中に含まれる浮遊粒子状物質のうち粒径が予め定められた値以下である微小粒子を含む浮遊粒子状物質含有空気を得る少なくとも1つ以上の分級手段と、
前記浮遊粒子状物質含有空気から前記微小粒子を採取する複数の採取手段と、
前記浮遊粒子状物質を含む試料大気を吸引するための吸引手段と、
前記吸引手段によって吸引される前記試料大気の流量を調節する流量制御手段と、
前記浮遊粒子状物質含有空気中の前記微小粒子が、予め定められたタイミングで異なる前記採取手段によって採取されるように前記試料大気の流れを選択的に切替える切替手段と、
前記切替手段に切替指示を出力する切替制御手段とを備える、浮遊粒子状物質の採取装置。
【請求項2】
前記切替手段は、1つの前記分級手段から排出された前記浮遊粒子状物質含有空気が第1の前記採取手段と第2の前記採取手段とによって交互に採取されるように、予め定められたタイミングで前記試料大気の流れを選択的に切替えることを特徴とする、請求項1に記載の浮遊粒子状物質の採取装置。
【請求項3】
前記切替手段は、前記浮遊粒子状物質含有空気が第1の前記分級手段に対応する第1の前記採取手段によって採取された後に、第2の前記分級手段に対応する第2の前記採取手段によって前記微小粒子が採取されるように、予め定められたタイミングで前記試料大気の流れを選択的に切替えることを特徴とする、請求項1に記載の浮遊粒子状物質の採取装置。
【請求項1】
浮遊粒子状物質を含む試料大気を吸引し当該試料大気から浮遊粒子状物質を採取する浮遊粒子状物質の採取装置であって、
前記試料大気中に含まれる浮遊粒子状物質のうち粒径が予め定められた値以下である微小粒子を含む浮遊粒子状物質含有空気を得る少なくとも1つ以上の分級手段と、
前記浮遊粒子状物質含有空気から前記微小粒子を採取する複数の採取手段と、
前記浮遊粒子状物質を含む試料大気を吸引するための吸引手段と、
前記吸引手段によって吸引される前記試料大気の流量を調節する流量制御手段と、
前記浮遊粒子状物質含有空気中の前記微小粒子が、予め定められたタイミングで異なる前記採取手段によって採取されるように前記試料大気の流れを選択的に切替える切替手段と、
前記切替手段に切替指示を出力する切替制御手段とを備える、浮遊粒子状物質の採取装置。
【請求項2】
前記切替手段は、1つの前記分級手段から排出された前記浮遊粒子状物質含有空気が第1の前記採取手段と第2の前記採取手段とによって交互に採取されるように、予め定められたタイミングで前記試料大気の流れを選択的に切替えることを特徴とする、請求項1に記載の浮遊粒子状物質の採取装置。
【請求項3】
前記切替手段は、前記浮遊粒子状物質含有空気が第1の前記分級手段に対応する第1の前記採取手段によって採取された後に、第2の前記分級手段に対応する第2の前記採取手段によって前記微小粒子が採取されるように、予め定められたタイミングで前記試料大気の流れを選択的に切替えることを特徴とする、請求項1に記載の浮遊粒子状物質の採取装置。
【図1】


【図2】
【図3】

【図4】

【図2】
【図3】
【図4】
【公開番号】特開2011−59013(P2011−59013A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−210901(P2009−210901)
【出願日】平成21年9月11日(2009.9.11)
【出願人】(591081321)紀本電子工業株式会社 (19)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月11日(2009.9.11)
【出願人】(591081321)紀本電子工業株式会社 (19)
【Fターム(参考)】
[ Back to top ]