
浮遊粒子状物質の測定装置および浮遊粒子状物質保存装置
【課題】浮遊粒子状物質の重量測定に供する空気を除湿する際、浮遊粒子状物質における水分以外の揮発成分の揮発を抑えることができる浮遊粒子状物質測定装置を提供する。
【解決手段】粒径が所定値以下である微小粒子と粒径が所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち微小粒子を捕集して、捕集した微小粒子の質量を測定する装置であって、浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気から粗大粒子を除去して、微小粒子を含む微小粒子含有空気を得る分級手段と、微小粒子含有空気に、浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気を混合器で混ぜ合わせて混合空気を生成することにより、混合空気中の微小粒子を非加熱で除湿する乾燥手段と、混合空気を第1のフィルタに導いて、微小粒子を第1のフィルタ上に捕集する捕集手段と、第1のフィルタ上に捕集された微小粒子の重量を測定する重量測定手段とを備える。
【解決手段】粒径が所定値以下である微小粒子と粒径が所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち微小粒子を捕集して、捕集した微小粒子の質量を測定する装置であって、浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気から粗大粒子を除去して、微小粒子を含む微小粒子含有空気を得る分級手段と、微小粒子含有空気に、浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気を混合器で混ぜ合わせて混合空気を生成することにより、混合空気中の微小粒子を非加熱で除湿する乾燥手段と、混合空気を第1のフィルタに導いて、微小粒子を第1のフィルタ上に捕集する捕集手段と、第1のフィルタ上に捕集された微小粒子の重量を測定する重量測定手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、浮遊粒子状物質の測定装置に関し、より詳しくは、大気中の浮遊粒子状物質の連続測定装置に関し、特に人の健康に影響の大きい微小浮遊粒子状物質の連続測定装置に関する。
【背景技術】
【0002】
大気中には、種々の粒径の浮遊粒子状物質が存在する。粒径が10μm以下の浮遊粒子状物質は、人が呼吸するに際し、気道で濾過されずに、吸引され、肺に沈降することから、特に人に対する毒性が高い。このような理由で、公害対策基本法に基づく大気汚染に関する環境基準では、大気中の浮遊粒子状物質は、粒径が10μm以下のものと規定されている。そして、従来からこの規定に従って、粒径10μm以下の浮遊粒子状物質の重量を測定する装置が市販されている。なお、本明細書では、浮遊粒子状物質と記載するものは粒径10μm以下の粒子状物質とは限らずに、大気中に浮遊する粒子状物質とする。
【0003】
大気中の浮遊粒子状物質には、粒径2.5μm程度を境として粗大粒子(coarse particle,以下CPと略すことがある)と微小粒子(fine particle,以下FPと略すことがある)とが存在する。
【0004】
CPは、海塩粒子や土壌に由来する砂塵など自然に生じるものを含んでいる。これに対し、FPは工場等から排出されるばいじんやディーゼル車等の発生源から直接大気に放出される一次生成粒子と、硫黄酸化物(SOx)、窒素酸化物(NOx)、揮発性有機化合物(VOC)等のガス状物質が大気中で粒子状物質に変化する二次生成粒子がある。最近、都市部における大気中の浮遊粒子状物質の粒径についての人体に及ぼす疫学調査の結果、FPは低濃度においても、心血管疾患、肺がん、喘息などの疾患に影響すると考えられ、FPの重量濃度の増加が死亡率を増加させていると考えられている。
【0005】
特許文献1には、一定の大気中に含まれる浮遊粒子状物質の重量を連続的に測定する装置が記載されている。この装置は、浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気に含まれる浮遊粒子状物質をフィルタ上に捕集し、捕集した浮遊粒子状物質をβ線吸収法で重量測定する。浮遊粒子状物質の測定は、従来から、秤量器を用いた人手による分析(手分析)が行われている。この手分析では、フィルタ上に採取した浮遊粒子状物質を秤量前に所定の湿度(50%)でコンディショニングする。そこで、特許文献1の測定装置では、従来の手分析に測定条件を近づけるために、重量測定ユニットに送り込まれる試料空気を、送り込む前の段階でヒータユニットにより加熱することにより、浮遊粒子状物質の周りの空気の相対湿度を低下させ、測定に供する試料空気の湿度を手分析の条件と一致させるようにしている。
【0006】
ちなみに、米国では、浮遊粒子状物質の標準測定方法(Federal Register Vol.62, No.138/Appendix L:略称FRM法)が制定されており、非常に多くの実験データが蓄積され、特に疫学用データとして有用性が高いものとなっている。
【0007】
FRM法による測定では、大気採取装置により、分級装置で分級して、FPを1日に一回程度、一定流量でフィルタ上に粒子状物質を採取し、その後人手により、フィルタを実験室に持ち帰り、制御設定温度15〜30°C(各制御設定温度における誤差範囲は±5°C)、制御設定相対湿度20%〜45%(各制御設定相対湿度における誤差範囲は±5%)、より好ましくは30〜40%、さらに好ましくは35%に保持された恒温、恒湿条件下で24時間程度のコンディショニングを行ったのち、精密天秤による重量濃度の測定が行われている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−147437号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記した特許文献1に記載の技術には以下のような問題があった。すなわち、特許文献1に記載の装置は、重量測定に供する試料空気をヒータユニットにより加熱乾燥させているので、浮遊粒子状物質を加熱してしまい、浮遊粒子状物質に含まれる揮発成分(水分の他、それ以外のアンモニア等の揮発成分)が揮発してしまい、当該装置による測定結果と手分析による測定結果が大きくずれてしまうという問題があった。
【0010】
本発明は、そのような実情に鑑みてなされたもので、浮遊粒子状物質の重量測定に供する試料空気を除湿する際、浮遊粒子状物質自身を加熱せずに乾燥させ、水分以外の揮発成分の揮発を抑える(平衡をずらさない)ことができる浮遊粒子状物質の測定装置およびこの測定装置に用いられる浮遊粒子状物質保存装置の提供を目的とする。
【課題を解決するための手段】
【0011】
第1の発明は、
粒径が所定値以下である微小粒子と粒径が上記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち上記微小粒子を捕集して、捕集した上記微小粒子の質量を測定する装置であって、
上記浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気から上記粗大粒子を除去して、上記微小粒子を含む微小粒子含有空気を得る分級手段と、
上記微小粒子含有空気に、上記浮遊粒子状物質を除去した乾燥空気を混合器で混ぜ合わせて混合空気を生成することにより、上記混合空気中の上記微小粒子を非加熱で除湿する乾燥手段と、
上記混合空気を第1のフィルタに導いて、上記微小粒子を当該第1のフィルタ上に捕集する捕集手段と、
上記第1のフィルタ上に捕集された上記微小粒子の重量を測定する重量測定手段と、を備えた浮遊粒子状物質測定装置である。
【0012】
第1の発明によれば、微小粒子含有空気に、浮遊粒子状物質を除去した乾燥空気を混ぜ合わせて混合空気を生成する。よって、浮遊粒子状物質の周りの空気の湿度を調節した空気(除湿空気)により、浮遊粒子状物質を加熱することなく、浮遊粒子状物質を調湿する。従って、微小粒子における水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分が揮発していない微小粒子を重量測定に供することができる。
【0013】
第2の発明は、第1の発明において、
上記混合空気の湿度を所定範囲内に制御する湿度制御手段をさらに備えたことを特徴とする。
【0014】
第2の発明によれば、混合空気の湿度を所定範囲内に制御することができる。
【0015】
第3の発明は、第2の発明において、
上記湿度制御手段は、
上記混合器に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段を含み、
上記大気測定手段で測定された湿度、温度、および圧力に基づいて、上記混合空気の湿度を上記所定範囲内にフィードバック制御することを特徴とする。
【0016】
第3の発明によれば、混合器に吸引される前の大気の湿度、温度、および圧力に基づいて、混合空気の湿度を正確に制御することができる。
【0017】
第4の発明は、第2の発明において、
上記湿度制御手段は、
上記分級手段に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段と、
上記混合空気の湿度が上記所定範囲内になるように、上記大気測定手段で測定された湿度および温度に基づいて、上記微小粒子含有空気に混ぜ合わせる上記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする。
【0018】
第4の発明によれば、分級手段に吸引される前の大気の湿度、温度、および圧力に基づいて、混合空気の湿度を正確に制御することができる。
【0019】
第5の発明は、第2の発明において、
上記湿度制御手段は、
上記微小粒子が上記第1のフィルタ上に捕集される直前或いは直後の上記混合空気の湿度、温度、および圧力を測定する除湿空気状態測定手段を含み、
上記除湿空気状態測定手段で測定された湿度、温度、および圧力に基づいて、上記混合空気の湿度を上記所定範囲内にフィードバック制御することを特徴とする。
【0020】
第5の発明によれば、微小粒子がフィルタ上に捕集される直前或いは直後の混合空気の湿度および温度を測定するので、重量測定の直前或いは直後における混合空気の湿度および温度を測定することができる。よって、混合空気の湿度をより正確に制御することができる。
【0021】
第6の発明は、第2の発明において、
上記湿度制御手段は、
上記微小粒子が上記第1のフィルタ上に捕集される直前或いは直後の上記混合空気の湿度、温度、および圧力を測定する除湿空気状態測定手段と、
上記混合空気の湿度が上記所定範囲内になるように、上記混合空気測定手段で測定された湿度、温度、および圧力に基づいて、上記微小粒子含有空気に混ぜ合わせる上記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする。
【0022】
第6の発明によれば、微小粒子がフィルタ上に捕集される直前或いは直後の混合空気の湿度および温度を測定するので、重量測定の直前或いは直後における混合空気の湿度および温度を測定することができる。よって、混合空気の湿度をより正確に制御することができる。
【0023】
第7の発明は、第1の発明において、
上記微小粒子が上記第1のフィルタ上に捕集された後の上記混合空気に対してさらなる除湿を行う第2の乾燥手段とをさらに備え、
上記乾燥空気は、上記微小粒子が上記フィルタ上に捕集された後の上記混合空気に対して上記第2の乾燥手段による処理がなされた後の空気であることを特徴とする。
【0024】
第7の発明によれば、微小粒子が捕集された後の混合空気を乾燥空気に変えて再利用することができる。
【0025】
第8の発明は、第1の発明において、
上記重量測定手段は、β線吸収法の重量測定手段であることを特徴とする。
【0026】
第8の発明によれば、任意の時間毎に連続的に微小粒子の重量測定をすることができる。重量測定を行う時間間隔は特に限定されないが、例えば1秒、或いは1分に設定することができる。
【0027】
第9の発明は、第1の発明において、
上記第1のフィルタはテープ状フィルタであり、
上記浮遊粒子状物質測定装置は、
上記第1のフィルタを所定のタイミングでその長さ方向に送るテープ送り機構をさらに備え、
上記テープ送り機構は、
未使用の上記第1のフィルタを供給する第1の送りリールと、
使用済みの上記第1のフィルタをロール状に巻回して収容する巻き取りリールとを含むことを特徴とする。
【0028】
第9の発明によれば、テープ状である第1のフィルタを所定のタイミングで長さ方向に送り、微小粒子を第1のフィルタ上に連続的に捕集することができる。
【0029】
第10の発明は、第9の発明において、
上記第1のフィルタにおける上記微小粒子が捕集された面に密着するようにカバーテープを供給する第2の送りリールをさらに備え、
上記巻き取りリールは、上記第1のフィルタと上記カバーテープが上記微小粒子を挟み込んだ状態で上記第1のフィルタと上記カバーテープを一緒に巻き取ることを特徴とする。
【0030】
第10の発明によれば、テープ状フィルタとカバーテープの間に微小粒子を挟み込んだ状態で当該テープ状フィルタとカバーテープを巻き取ることができる。これにより、テープ状フィルタ上に捕集した微小粒子を保存することができる。
【0031】
第11の発明は、第1の発明において、
上記捕集手段は、フィルタサンプリングと精密天秤による重量測定法と同じ時間帯に上記微小粒子を捕集することを特徴とする。
【0032】
第11の発明によれば、フィルタサンプリングと精密天秤による重量測定法と同じ時間帯に微小粒子を捕集するので、フィルタサンプリングと精密天秤による重量測定法に近い条件で重量測定を行うことができる。
【0033】
第12の発明は、
捕集した浮遊粒子状物質を保存する浮遊粒子状物質保存装置であって、
上記浮遊粒子状物質を捕集するテープ状フィルタと、
上記テープ状フィルタに捕集された上記浮遊粒子状物質を保護するカバーテープと、
上記テープ状フィルタおよび上記カバーテープをそれぞれ長さ方向に送るテープ送り機構とを備え、
上記テープ送り機構は、
未使用の上記テープ状フィルタを供給する第1の送りリールと、
上記テープ状フィルタにおける上記浮遊粒子状物質が捕集された面に密着するように上記カバーテープを供給する第2の送りリールと、
使用済みの上記テープ状フィルタと上記カバーテープが上記浮遊粒子状物質を挟み込んだ状態で当該テープ状フィルタと当該カバーテープを一緒にロール状に巻回して収容する巻き取りリールとを含むことを特徴とする浮遊粒子状物質保存装置である。
【0034】
第12の発明によれば、テープ状フィルタとカバーテープの間に浮遊粒子状物質を挟み込んだ状態で当該テープ状フィルタとカバーテープを巻き取ることができる。これにより、テープ状フィルタ上に捕集した浮遊粒子状物質を保存することができる。浮遊粒子状物質は、微小粒子、粗大粒子、またはその双方のいずれであってもよい。
【発明の効果】
【0035】
本発明によれば、浮遊粒子状物質の重量測定に供する空気を除湿する際、浮遊粒子状物質における水分以外の揮発成分の揮発を抑える(平衡をずらさない)ことができる浮遊粒子状物質の測定装置およびこの測定装置に用いられる浮遊粒子状物質保存装置を提供することができる。
【図面の簡単な説明】
【0036】
【図1】第1実施形態に係る浮遊粒子状物質の測定装置を示す図
【図2】混合器の一例を示す断面図
【図3】図1に示す測定装置の動作を示すフローチャート
【図4】第2実施形態に係る浮遊粒子状物質の測定装置を示す図
【図5】第3実施形態に係る浮遊粒子状物質の測定装置を示す図
【図6】第4実施形態に係る浮遊粒子状物質の測定装置を示す図
【図7】第5実施形態に係る浮遊粒子状物質の測定装置を示す図
【図8】図7に示す測定装置の動作を示すフローチャート
【図9】第7実施形態に係る浮遊粒子状物質の測定装置を示す図
【図10】フィルタに捕集された粒子状物質の重量の変化を示す図
【図11】粒子状物質の重量測定時の湿度の変化を示す図
【図12】外気の湿度とフィルタ付近の湿度を絶対湿度としてプロットした図
【発明を実施するための形態】
【0037】
(第1実施形態)
本発明の第1実施形態について、図面を参照しつつ説明する。図1は、第1実施形態に係る浮遊粒子状物質の測定装置を示す図である。
【0038】
第1実施形態に係る浮遊粒子状物質測定装置1は、粒径が所定値以下である微小粒子と粒径が上記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち上記微小粒子を捕集し、捕集した微小粒子の質量を測定する装置である。微小粒子と粗大粒子の境界となる上記所定値は特に限定されるものではないが、例えば、2.5μmとされる。
【0039】
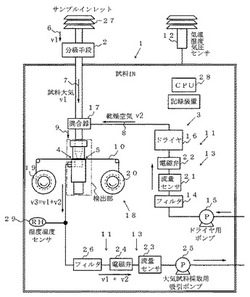
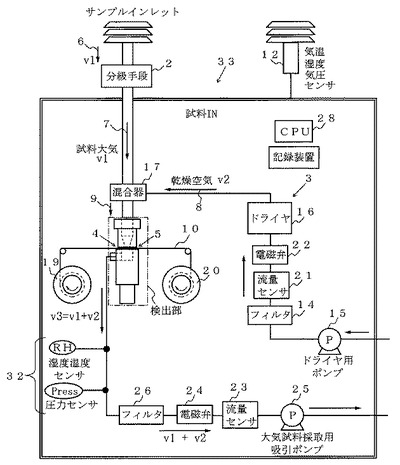
浮遊粒子状物質測定装置1(以下、測定装置1と称することがある)は、分級手段2と、乾燥手段3と、捕集手段4と、重量測定手段5と、湿度制御手段11とを備えている。
【0040】
分級手段2は、浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気6中の浮遊粒子状物質を、分級比(質量基準)が50%となるような粒子の空気力学的粒径を閾値として、粒径が当該閾値以下の微小粒子と、粒径が当該閾値を超える粗大粒子とに分級する。上記閾値は特に限定されるものではないが、例えば、2.5μmとされる。分級手段2の種類は特に限定されるものではないが、例えば、インパクタ或いはサイクロンを分級手段として採用した場合、粗大粒子はその多くが慣性衝突によって試料大気から除去され、これにより、粗大粒子の多くが除去された微小粒子含有空気7を得る。また、バーチャルインパタを採用した場合には、分級手段2は、上記閾値を超える粒子を分級比で50%以上の割合(質量割合)で含む粗大粒子含有空気と、上記閾値以下の粒子を分級比で50%以上の割合(質量割合)で含む微小粒子含有空気7とに分ける。これによって、分級手段2は、サンプルインレット27で吸引される空気に含まれる浮遊粒子状物質を分級することができる。分級手段2における吸引力は、捕集手段4よりも下流側に設けられた試料捕集用吸引ポンプ25で発生させる。
【0041】
乾燥手段3は、微小粒子含有空気7に、浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気8を混合器45で混ぜ合わせて混合空気9を生成することにより、混合空気9中の微小粒子を非加熱で除湿する。乾燥手段3は、図1に示される例では、第2のフィルタ14と、ドライヤ用吸引ポンプ15と、ドライヤ16と、混合器17とを含んでいる。微小粒子含有空気7に乾燥空気8を混ぜ合わせることにより、混合空気9の湿度は微小粒子含有空気7の湿度よりも低くなり、除湿が行われる。ドライヤ16の種類は、非加熱方式のドライヤであれば特に限定されるものではないが、例えば、筒状容器(カラム)内にシリカゲル等の除湿材を封入した構造とすることができる。また、モリキュラーシーブスを2つのカラムに充填させ、一方のカラムで空気乾燥を行い、他方のカラムでモリキュラーシーブスの乾燥再生を行い、バルブの制御により、空気乾燥を行うカラムを交互に切替えながら連続的に空気乾燥(除湿)を行うヒートレスドライヤと呼ばれる自己再生式の除湿器を採用することもできる。
【0042】
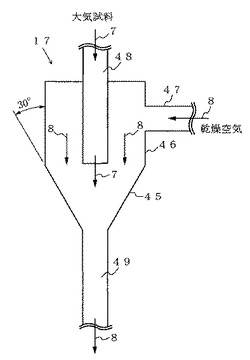
第2のフィルタ14は、実質的に全ての浮遊粒子状物質を除去するフィルタである。ドライヤ用吸引ポンプ15は、大気を第2のフィルタ14に送り込み、第2のフィルタ14から出た清浄空気をドライヤ16に送り込み、ドライヤ16から出た乾燥空気8を混合器17に送り込む動力源である。混合器17は、微小粒子含有空気7と乾燥空気8を混合させる。混合器17の構造は特に限定されないが、例えばT字管であってもよい。或いは、混合器17は、図2に示されるものであってもよい。図2は、混合器17の一例を示す断面図である。図2に示される混合器17は、逆円錐状部45と、逆円錐状部45の大径側に連なる円筒状部46とを含む。円筒状部46の側面には、乾燥空気8を導入する管路47が接続されている。混合器17の中心軸上において円筒状部46と逆円錐状部45の境界付近には、試料大気7を導入する管路46の一端側開口部が位置している。逆円錐状部45の小径側には、混合空気9を捕集手段4に導く管路49が接続されている。管路47から導入された乾燥空気8と、管路48から導入された試料大気7は、逆円錐状部45内で均一に混合される。混合空気9は、管路49を経て捕集手段4へ導かれる。
【0043】
捕集手段4は、混合空気9を第1のフィルタ10に導いて、微小粒子を第1のフィルタ10上に捕集する。図1に示される例では、第1のフィルタ10はテープ状フィルタである。第1のフィルタ10は、捕集した微小粒子の質量分析に影響を与えない素材で構成されることが好ましく、例えば、テープ状のフッ素系メンブランフィルタで構成される。捕集手段4は、第1のフィルタ10と、第1のフィルタ10を所定のタイミングでその長さ方向に送るテープ送り機構18とを含む。第1のフィルタ10を送るタイミングは特に限定されないが、例えば、1分置き、或いは1時間置きとすることができる。
テープ送り機構18は、未使用の第1のフィルタ10を供給する第1の送りリール19と、使用済みの第1のフィルタ10をロール状に巻回して収容する巻き取りリール20とを含む。
捕集手段4は、フィルタサンプリングと精密天秤による重量測定法(手分析法)と同じ時間帯に微小粒子を捕集することが好ましい。
【0044】
重量測定手段5は、第1のフィルタ10上に捕集された微小粒子の重量を測定する。重量測定手段の種類は特に限定されるものではないが、例えば、従来公知のβ線吸収法を採用することができる。
【0045】
第1のフィルタ10の捕集位置には、β線源からβ線が照射され、透過したβ線量が、たとえば1分毎に連続的に検出される。検出結果は、CPU28に入力される。
【0046】
β線検出器(シンチレーションカウンタ)の検出結果と、第1のフィルタ10上の浮遊粒子状物質の量との関係は、式1で計算される。
Ij=Ij-1exp(−μΧ) (Χ:カイ) ・・・(式1)
【0047】
ここにIjは、ある瞬間に微小粒子を捕集した第1のフィルタ10を透過したβ線量であり、Ij-1はその1分前の同じ量である。μは比例定数であり、Χはフィルタの単位面積当たりの捕集した微小粒子の量(mg/cm2)である。μはβ線源に固有の値であり、標準物質によって予めcm2/mgの単位で求められる。
式1を変形して、式2を得る。
Χ=−ln(Ij/Ij-1)/μ ・・・(式2)
【0048】
式2からIjとIj-1との比を求めることによって、たとえば1分間に捕集されたフィルタの単位面積当たりの微小粒子の量が計算でき、これに捕集位置の面積を掛ければ、1分間に捕集された微小粒子の量(mg/min)が算出できる。さらに、算出した微小粒子の量(mg/min)を吸引流量(m3/min)で割れば、大気中の微小粒子の質量濃度(mg/m3)を求めることができる。
【0049】
このように、β線吸収法によって微小粒子の質量を測定することができる。
【0050】
湿度制御手段11は、混合空気9の湿度を所定範囲内に制御する。ここで言う「所定範囲」は、特に限定されるものではないが、例えば、FRM法によるコンディショニングで設定される値であり、相対湿度20%〜45%、より好ましくは30〜40%、さらに好ましくは35%である。図1に示される例では、湿度制御手段11は、大気測定手段12と、混合空気測定手段29と、流量制御手段13とを含む。
【0051】
大気測定手段12は、分級手段2に吸引される前の大気の相対湿度、温度、および圧力を測定する。つまり、測定装置1の外部における大気の相対湿度、温度、および圧力(気圧)を測定する。
【0052】
混合空気測定手段29は、混合空気9の温度および圧力を測定する。
【0053】
流量制御手段13は、混合空気9の湿度が上記所定範囲内になるように、大気測定手段12で測定された湿度、温度、および圧力に基づいて、微小粒子含有空気7に混ぜ合わせる乾燥空気8の量をフィードバック制御する。図1に示される例では、流量制御手段13は、CPU28と、流量センサ21と、電磁弁22と、流量センサ23と、電磁弁24とを含む。流量センサ21は、ドライヤ16に供給される空気の流量を測定する。電磁弁22は、ドライヤ16に供給される空気の流量を調節する。流量センサ23は、重量測定手段5で微小粒子の重量が測定された後の混合空気9の流量を測定する。電磁弁24は、重量測定手段5で微小粒子の重量が測定された後の混合空気9の流量を調節する。混合空気9は、重量測定手段5で微小粒子の重量が測定された後、第3のフィルタ26を経由して大気中に排出される。第3のフィルタ26は、混合空気9に含まれる実質的に全ての浮遊粒子状物質を除去する。
【0054】
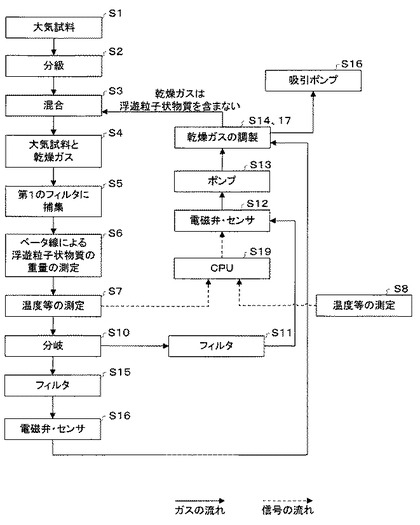
次に、測定装置1の動作について、図3のフローチャートを参照しつつ説明する。図3は、測定装置1に取り込んだ空気の流れと、信号の流れを示す図である。実線の矢印は空気の流れを示し、破線の矢印は信号の流れを示している。
【0055】
まず、サンプルインレット27から試料大気が吸引される(ステップS1)。次いで、分級手段2は、吸引した試料大気を、微小粒子含有空気7と粗大粒子含有空気(図示せず)とに分級する(ステップS2)。次いで、混合器17は、微小粒子含有空気7に乾燥空気8を混合し、混合空気9を生成する(ステップS3、4)。次いで、捕集手段4は、第1のフィルタ10上に微小粒子を捕集する(ステップS5)。次いで、重量測定手段5は、β線吸収法により微小粒子の重量を測定する(ステップS6)。次いで、重量の測定を終えた混合空気9は、混合空気測定手段29により、温度および圧力が測定される(ステップS7)。次いで、重量の測定を終えた混合空気9は、第3のフィルタ26で残余の浮遊粒子状物質が除去される(ステップS8)。次いで、全ての浮遊粒子状物質が除去された混合空気9は、電磁弁24により流量が制御され、その流量は流量センサ23に検知される(ステップS9)。次いで、流量が検知された混合空気9は、吸引ポンプ25を介して測定装置1の外に排出される(ステップS10)。
【0056】
乾燥空気8の生成過程について説明する。まず、ドライヤ用吸引ポンプ15が大気を吸入する(ステップS11)。次いで、吸引された空気は第2のフィルタ14で全ての浮遊粒子状物質が除去され、清浄な空気となる(ステップS12)。大気測定手段12は、大気の相対湿度、温度および圧力を測定する(ステップS13)。CPU28は、ステップS7で測定された温度および圧力、並びに、ステップS13で測定された相対湿度、温度、および圧力に基づいて所定の演算を行い、制御信号を生成する(ステップS14)。上記ステップS12の後、清浄な空気は電磁弁22で流量が制御され、流量は流量センサ21で検知される(ステップS15)。電磁弁22の開度の制御は、ステップS14で生成された制御信号に基づいて行われる。次いで、電磁弁22で流量が制御された清浄空気は、ドライヤ16で、加熱されることなく水分が除去されて乾燥空気となる(ステップS16)。次いで、乾燥空気は、上記ステップS3で述べたように、微小粒子含有空気7と混合される。
【0057】
ここで、ステップS15においてCPU28が行う演算について説明する。
試料大気6、乾燥空気8、混合後の空気(制御開始時)、混合後の空気(制御後)について、それぞれの質量流量V、水分の絶対濃度c、相対湿度rh、温度t、絶対圧力pを表す文字を、以下の表1に示す。
【0058】
【表1】

【0059】
図1に示される測定装置1では、CPU28が測定装置1の外部における大気の湿度、温度、および圧力、並びに、混合空気9の温度および圧力に基づいて混合空気9の相対湿度を計算し、混合空気9の湿度制御を行う。CPU28の指示の下、試料大気の流量v1が固定され、乾燥空気8の流量v2が調節されることで、混合空気9の相対湿度は所定値に制御される。そのことを以下に説明する。
【0060】
試料大気6における水分の絶対濃度は以下の式3で表される。
c1=f1(rh1,t1,p1) ・・・(式3)
混合空気9(制御開始時)の質量流量は以下の式4で表される。
v3=v1+v2 ・・・(式4)
混合空気9(制御開始時)における水分の絶対濃度は以下の式5で表される。
c3=(c1×v1+c2×v2)/v3 ・・・(式5)
乾燥空気8中の水分量が十分少ないとすれば、
c1>>c2で、c1×v1>>c2×v2となり、式3は以下の式6に変形することができる。
c3=(c1×v1)/(v1+v2) ・・・(式6)
混合空気9(制御開始時)の相対湿度は以下の式7で表される。
rh3=f2(c3,t3,p3) ・・・(式7)
式7に、式6で求めたc3、および測定したt3およびp3を代入することにより、混合空気9(制御開始時)の相対湿度rh3が求まる。よって、rh3が目的のrh3’となるように流量v2を調節すればよい。
以上が、測定装置1の動作である。
【0061】
以上説明したように、測定装置1によれば、微小粒子含有空気7に、浮遊粒子状物質を除去した乾燥空気8を混ぜ合わせて混合空気9を生成するので、加熱手段を用いることなく、湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子を加熱することなく除湿することができる。これにより、微小粒子に含まれる揮発成分(水分以外のアンモニア等の揮発成分)の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0062】
(第2実施形態)
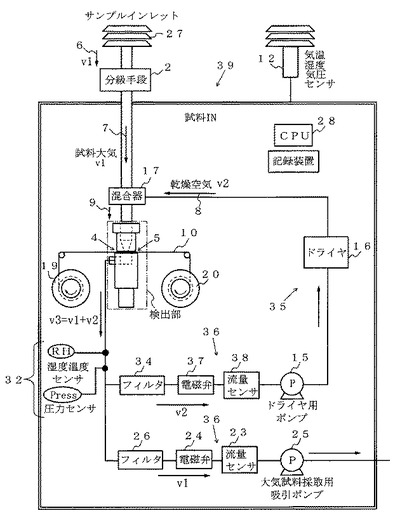
本発明の第2実施形態について、図面を参照しつつ説明する。図4は、第2実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第1実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0063】
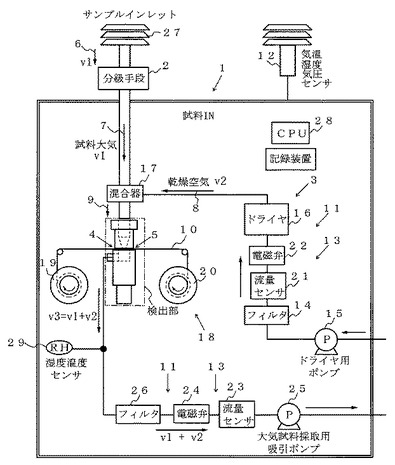
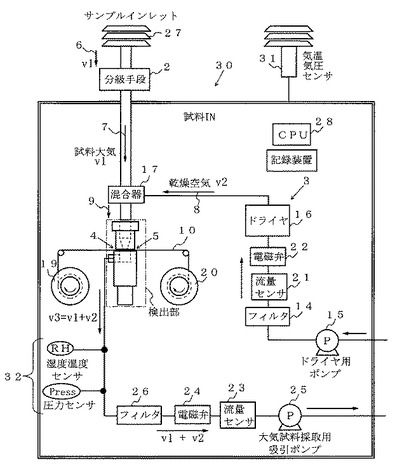
第2実施形態に係る浮遊粒子状物質測定装置30では、第1実施形態における大気測定手段12および混合空気測定手段29に代えて、それぞれ、大気測定手段31および混合空気測定手段32が設けられている。また、第2実施形態では、CPU28で行われる演算が、第1実施形態とは異なっている。その他の構成は第1実施形態と同様である。
【0064】
大気測定手段31は、分級手段2に吸引される前の大気の温度および圧力を測定する。つまり、測定装置1の外部における大気の温度および圧力を測定し、湿度は測定しない。
【0065】
混合空気測定手段29は、混合空気9の相対湿度、温度、および圧力を測定する。
【0066】
第2実施形態で行われるCPU28の演算について、以下に説明する。
【0067】
図4に示される測定装置30では、CPU28が測定装置30の外部における大気の温度および圧力、並びに、混合空気9の相対湿度、温度および圧力に基づいて混合空気9の相対湿度を計算し、混合空気9の湿度制御を行う。CPU28の指示の下、試料大気の流量v1が固定され、乾燥空気8の流量v2が調節されることで、混合空気9の相対湿度は所定値に制御される。そのことを以下に説明する。
【0068】
混合空気9(制御開始時)の質量流量は以下の式8で表される。
v3=v1+v2 ・・・(式8)
混合空気9(制御開始時)における水分の絶対濃度は以下の式9で表される。
c3=(c1×v1+c2×v2)/v3 ・・・(式9)
乾燥空気8中の水分量が十分少ないとすれば、
c1>>c2で、c1×v1>>c2×v2となり、式9は以下の式10に変形することができる。
c1=c3×(v1+c2)/v1 ・・・(式10)
試料大気の相対湿度は以下の式11で表される。
rh1=f2(c1,t1,p1) ・・・(式11)
式11に、式10で求めたc1、および測定したt1およびp1を代入することにより、試料大気6の相対湿度rh1が求まる。
相対湿度rh1、並びに、測定したt3およびp3を上記した式3に代入することにより、c1が求まる。その後、第1実施形態と同様に、式4〜7を用いて計算を行うことにより、相対湿度rh3が求まる。よって、rh3が目的のrh3’となるように流量v2を調節すればよい。
【0069】
測定装置30によれば、微小粒子含有空気7に、浮遊粒子状物質を除去した乾燥空気8を混ぜ合わせて混合空気9を生成するので、加熱手段を用いることなく、湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子を加熱することなく除湿することができる。これにより、微小粒子に含まれる水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0070】
(第3実施形態)
本発明の第3実施形態について、図面を参照しつつ説明する。図5は、第3実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第1実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0071】
第3実施形態に係る浮遊粒子状物質測定装置33では、第1実施形態における混合空気測定手段29に代えて、混合空気測定手段32が設けられている。また、第3実施形態では、CPU28で行われる演算が、第1実施形態とは異なっている。その他の構成は第1実施形態と同様である。
【0072】
混合空気測定手段32は、混合空気9の相対湿度、温度、および圧力を測定する。
【0073】
第3実施形態で行われるCPU28の演算について、以下に説明する。
【0074】
図5に示される測定装置33では、CPU28が測定装置33の外部における大気の相対湿度、温度および圧力、並びに、混合空気9の相対湿度、温度および圧力に基づいて、乾燥空気8における水分の絶対濃度を計算し、乾燥空気8の流量を調節して、混合空気9の湿度制御を行う。CPU28の指示の下、試料大気の流量v1が固定され、乾燥空気8の流量v2が調節されることで、混合空気9の相対湿度は所定値に制御される。そのことを以下に説明する。
【0075】
試料大気6における水分の絶対濃度は以下の式12で表される。
c1=f1(rh1,t1,p1) ・・・(式12)
混合空気9(制御開始時)における水分の絶対濃度は以下の式13で表される。
c3=f1(rh3,t3,p3)
=(c1×v1+c2×v2)/v3 ・・・(式13)
混合空気9(制御開始時)の質量流量は以下の式14(式4と同じ)で表される。
v3=v1+v2 ・・・(式14)
混合空気9(制御開始時)の相対湿度は以下の式15(式6と同じ)で表される。
rh3=f2(c3,t3,p3) ・・・(式15)
式11を変形してc2について求めると、式16となる。
c2=(c3×v3−c1×v1)/v2 ・・・(式16)
式15のc3に式13を代入し、rh3が目的のrh3’となるようなc2およびv2を求め、そのv2の値に乾燥空気8の流量を調節すればよい。
【0076】
測定装置33によれば、微小粒子含有空気7に、浮遊粒子状物質を除去した乾燥空気8を混ぜ合わせて混合空気9を生成するので、加熱手段を用いることなく、湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子を加熱することなく除湿することができる。これにより、微小粒子に含まれる水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0077】
(第4実施形態)
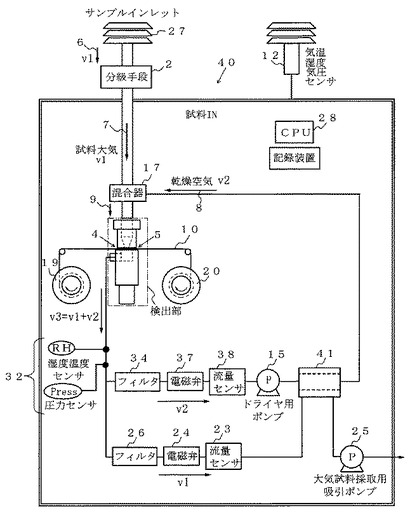
本発明の第4実施形態について、図面を参照しつつ説明する。図6は、第4実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第3実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0078】
第4実施形態に係る浮遊粒子状物質測定装置39が第3実施形態と異なる点は、第3実施形態のように重量測定を終えた混合空気9を外部に排気するのではなく、重量測定を終えた混合空気9に再度乾燥処理を施してから混合器17に戻すようにした点である。詳細を以下に説明する。
【0079】
第4実施形態では、図6に示されるように、第2のフィルタ34と、第2の乾燥手段35と、流量制御手段36とを備えている。
【0080】
第2のフィルタ34は、微小粒子が第1のフィルタ10上に捕集された後の混合空気9に対して浮遊粒子状物質のさらなる除去を行う。
【0081】
第2の乾燥手段35は、微小粒子が第1のフィルタ10上に捕集された後の混合空気9に対してさらなる除湿を行う。
【0082】
流量制御手段36は、混合空気9の湿度が上記所定範囲内になるように、大気測定手段12で測定された湿度、温度、および圧力、並びに、混合空気測定手段29で測定された混合空気9の湿度、温度、および圧力に基づいて、微小粒子含有空気7に混ぜ合わせる乾燥空気8の量をフィードバック制御する。図6に示される例では、流量制御手段36は、CPU28と、流量センサ38と、電磁弁37と、流量センサ23と、電磁弁24とを含む。流量センサ38は、ドライヤ16に供給される空気の流量を測定する。電磁弁37は、ドライヤ16に供給される空気の流量を調節する。混合空気9の一部は、フィルタ処理と乾燥処理を経た後に混合器17に戻され、残りの空気は、重量測定手段5で微小粒子の重量が測定された後、第3のフィルタ26を経由して大気中に排出される。
【0083】
従って、混合器17に供給される乾燥空気8は、微小粒子が第1のフィルタ10上に捕集された後の混合空気9に対して第2のフィルタ34および第2の乾燥手段35による処理がなされた後の空気である。つまり、重量測定手段5を通過した混合空気9にフィルタ処理と乾燥処理(加熱しない乾燥処理)を施すことにより、混合空気を乾燥空気に変えて再利用する。
【0084】
測定装置39によれば、混合空気9を乾燥空気に変えて再利用するので、乾燥に用いられるエネルギーの無駄を省くことができる。
【0085】
(第5実施形態)
本発明の第5実施形態について、図面を参照しつつ説明する。図7は、第5実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第4実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0086】
第5実施形態に係る浮遊粒子状物質測定装置40が第4実施形態と異なる点は、ドライヤ16に代えてドライヤ41が設けられている点と、流量センサ23がドライヤ41に接続され、試料捕集用吸引ポンプ25がドライヤ41に接続されている点であり、その他の構成は第4実施形態と同様である。重量測定を終えた混合空気9は、ドライヤ41で再度乾燥処理を施してから混合器17に戻すようにしている。以下、詳細に説明する。
【0087】
ドライヤ41は、内筒体と外筒体とを含む2重筒構造体である。内筒体の一端部はドライヤ用吸引ポンプ15に接続され、他端部は混合器17に接続されている。内筒体は、半透膜除湿材で構成されている。このため、内筒体は、その内側の気圧が外側の気圧よりも高い場合、内側を流れる空気の水分を吸収し、吸収した水分を外側へ放出する。半透膜除湿材の種類は特に限定されないが、例えば、パーマピュア社製のナフィオン(登録商標)・チューブを使用することができる。ナフィオン(登録商標)・チューブは、テトラ・フロオロエチレンとパーフルオロ−3,6−ジオキサ−4−メチル−7−オクテン−サルフォニック酸の重合体で構成されている。外筒体の一端部の側面には、流量センサ23が接続され、他端部の側面には、試料捕集用吸引ポンプ25が接続されている。このような構造とすることにより、内筒体内を流れる相対的に高い圧力の空気から水分が吸収され、その水分は試料捕集用吸引ポンプ25から排出される。よって、ドライヤ41は混合空気9から、さらに水分が除去された乾燥空気8を生成することができる。
【0088】
次に、測定装置40の動作について、図8のフローチャートを参照しつつ説明する。図8は、測定装置40に取り込んだ空気の流れと、信号の流れを示す図である。実線の矢印は空気の流れを示し、破線の矢印は信号の流れを示している。
【0089】
まず、サンプルインレット27から試料大気が吸引される(ステップS1)。次いで、分級手段2は、吸引した試料大気を、微小粒子含有空気7と粗大粒子含有空気(図示せず)とに分級する(ステップS2)。次いで、混合器17は、微小粒子含有空気7に乾燥空気8を混合し、混合空気9を生成する(ステップS3、4)。次いで、捕集手段4は、第1のフィルタ10上に微小粒子を捕集する(ステップS5)。次いで、重量測定手段5は、β線吸収法により微小粒子の重量を測定する(ステップS6)。次いで、重量の測定を終えた混合空気9は、混合空気測定手段29により、温度および圧力が測定される(ステップS7)。CPU28は、ステップS7で測定された温度および圧力、並びに、ステップS8で測定された相対湿度、温度、および圧力に基づいて所定の演算を行い、制御信号を生成する(ステップS9)。ステップS7で温度等の測定を終えた混合空気9は分岐され、一方の空気は第2のフィルタ34へ導かれ、他方の空気は第3のフィルタ26に導かれる(ステップS10)。第2のフィルタ34に導かれた混合空気9は、第2のフィルタ34で全ての浮遊粒子状物質が除去され、清浄な空気となる(ステップS11)。次いで、清浄な空気は、電磁弁22で流量が制御され、流量は流量センサ21で検知される(ステップS12)。清浄な空気はドライヤポンプ15で吸引され(ステップS13)、ドライヤ41の内筒体内に導かれる(ステップS14)。ステップS10で第3のフィルタ26に導かれた混合空気9は、第3のフィルタ26で全ての浮遊粒子状物質が除去され、清浄な空気となる(ステップS15)。次いで、清浄な空気は、電磁弁24で流量が制御され、流量は流量センサ23で検知される(ステップS16)。清浄な空気は、ドライヤ41の外筒体と内筒体の間に導かれる(ステップS17)。外筒体と内筒体の間に導かれた清浄な空気は、試料捕集用吸引ポンプ25で吸引され、外部に排出される(ステップS16)。ステップS14、17において、内筒体内を流れる清浄な空気は、加熱されることなく除湿されて乾燥空気となる。乾燥空気は、上記ステップS3で微小粒子含有空気7と混合される。
以上が、測定装置40の動作である。
【0090】
測定装置40によれば、微小粒子含有空気7に、浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気8を混ぜ合わせて混合空気9を生成するので、浮遊粒子状物質を加熱することなく、浮遊粒子状物質の周りの空気の湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子における水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0091】
(第6実施形態)
本発明の第6実施形態について、図面を参照しつつ説明する。図9は、第6実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第5実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0092】
第6実施形態に係る浮遊粒子状物質の測定装置42が第5実施形態と異なる点は、第1のフィルタ10上に捕集された微小粒子を保存できるようにした点である。
【0093】
測定装置42は、第2の送りリール43を備えている。第2の送りリール43は、第1のフィルタ10における微小粒子が捕集された面に密着するようにカバーテープ44を供給する。
【0094】
巻き取りリール20は、第1のフィルタ10とカバーテープ44が微小粒子を挟み込んだ状態で第1のフィルタ10とカバーテープ44を一緒に巻き取る。第1のフィルタ10とカバーテープ44は、例えば同じ帯幅に形成される。カバーテープ44の種類は特に限定されないが、微小粒子の成分に変動を与えにくい素材で形成される。
【0095】
測定装置42によれば、第1のフィルタ10とカバーテープ44が微小粒子を挟み込んだ状態で第1のフィルタ10とカバーテープ44を一緒に巻き取ることにより、重量測定後の微小粒子を保存することができる。保存された微小粒子は、組成分析等に供されることができる。
【0096】
(その他の実施形態)
なお、上記各実施形態では、上記各式を用いた計算により、目的とする相対湿度の混合空気9を得るようにしているが、乾燥空気8の流量v2を試行錯誤的に変化させ、混合空気9の相対湿度が目的とする相対湿度に収束するようにしてもよい。
【0097】
次に、本発明の効果について、図10〜12を参照しつつ説明する。
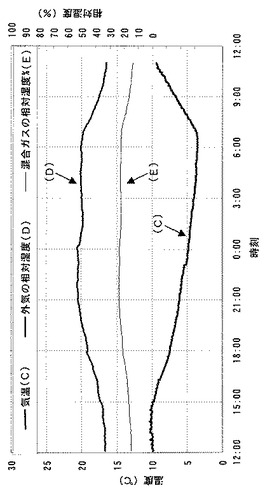
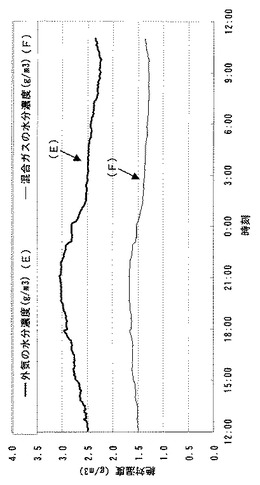
図10〜12は、昼の12時から次の日の11時まで大気中の浮遊粒子状物質を測定した時の時系列データを示す図である。
【0098】
図10は、フィルタに捕集された粒子状物質の重量の変化を示したものである。本発明に係る湿度制御機能付きの装置で測定を行うと同時に、湿度制御機能のない装置でも並行して比較計測を行った。さらに、サンプラを用いて従来行われてきたの手分析法による測定値と比較した。
【0099】
図10を見ると、湿度制御機能付きの装置(A)が最終的に手分析法による重量値(●印)に近く、重量変動も小さいことがわかる。これに対して、湿度制御を行わなかった装置(B)は、変動が大きく、特に夜間に重量が増大し、明け方から昼にかけて重量がほとんど変化しない傾向が顕見られた。これは、気温が低下して湿度が高くなる夜間に、フィルタに捕集された粒子状物質が大気中の水分を吸収し、逆に、気温が上昇して湿度が低下する昼には、夜間に蓄積した水分を放出するため、重量が大きく変動するものと考えられる。測定時の湿度の変化(図11参照)を見ても、そのことがよく分かる。
【0100】
図12は、外気の湿度とフィルタ付近の湿度を絶対湿度としてプロットしたものであるが、湿度制御により、乾燥空気を混ぜることで湿度が低く保たれていることが分かる。
【0101】
以上より、湿度制御を行い、湿度を低く保ちながら測定することで、試料大気の湿度の影響を抑えながら影響粒子状物質を連続的に測定することが、従来の手分析法に代わる自動測定器を開発する上で有効な手段であると考えられる。
【0102】
また、本発明に係る測定装置は、大気試料を加熱することなく湿度制御を行うため、水以外の揮発性成分を過度に損失することなく測定ができる装置でもある。
【産業上の利用可能性】
【0103】
本発明は、人の健康に影響の大きい微小浮遊粒子状物質の連続測定装置等として利用可能である。
【符号の説明】
【0104】
1,30,33,39,40,42 浮遊粒子状物質測定装置
2 分析手段
3 乾燥手段
4 捕集手段
5 重量測定手段
6 試料大気
7 微小粒子含有空気
8 乾燥空気
9 混合空気
10 第1のフィルタ
11 湿度制御手段
12,31 大気測定手段
13,36 流量制御手段
14,34 第2のフィルタ
15 ドライヤ用吸引ポンプ
16,41 ドライヤ
17 混合器
18 テープ送り機構
19 第1の送りリール
20 巻き取りリール
21,23,38 流量センサ
22,24,37 電磁弁
25 試料捕集用吸引ポンプ
26 第3のフィルタ
27 サンプルインレット
28 CPU
29,32 混合空気測定手段
35 第2の乾燥手段
43 第2の送りリール
44 カバーテープ
45 逆円錐状部
46 円筒状部
47,48,49 管路
【技術分野】
【0001】
本発明は、浮遊粒子状物質の測定装置に関し、より詳しくは、大気中の浮遊粒子状物質の連続測定装置に関し、特に人の健康に影響の大きい微小浮遊粒子状物質の連続測定装置に関する。
【背景技術】
【0002】
大気中には、種々の粒径の浮遊粒子状物質が存在する。粒径が10μm以下の浮遊粒子状物質は、人が呼吸するに際し、気道で濾過されずに、吸引され、肺に沈降することから、特に人に対する毒性が高い。このような理由で、公害対策基本法に基づく大気汚染に関する環境基準では、大気中の浮遊粒子状物質は、粒径が10μm以下のものと規定されている。そして、従来からこの規定に従って、粒径10μm以下の浮遊粒子状物質の重量を測定する装置が市販されている。なお、本明細書では、浮遊粒子状物質と記載するものは粒径10μm以下の粒子状物質とは限らずに、大気中に浮遊する粒子状物質とする。
【0003】
大気中の浮遊粒子状物質には、粒径2.5μm程度を境として粗大粒子(coarse particle,以下CPと略すことがある)と微小粒子(fine particle,以下FPと略すことがある)とが存在する。
【0004】
CPは、海塩粒子や土壌に由来する砂塵など自然に生じるものを含んでいる。これに対し、FPは工場等から排出されるばいじんやディーゼル車等の発生源から直接大気に放出される一次生成粒子と、硫黄酸化物(SOx)、窒素酸化物(NOx)、揮発性有機化合物(VOC)等のガス状物質が大気中で粒子状物質に変化する二次生成粒子がある。最近、都市部における大気中の浮遊粒子状物質の粒径についての人体に及ぼす疫学調査の結果、FPは低濃度においても、心血管疾患、肺がん、喘息などの疾患に影響すると考えられ、FPの重量濃度の増加が死亡率を増加させていると考えられている。
【0005】
特許文献1には、一定の大気中に含まれる浮遊粒子状物質の重量を連続的に測定する装置が記載されている。この装置は、浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気に含まれる浮遊粒子状物質をフィルタ上に捕集し、捕集した浮遊粒子状物質をβ線吸収法で重量測定する。浮遊粒子状物質の測定は、従来から、秤量器を用いた人手による分析(手分析)が行われている。この手分析では、フィルタ上に採取した浮遊粒子状物質を秤量前に所定の湿度(50%)でコンディショニングする。そこで、特許文献1の測定装置では、従来の手分析に測定条件を近づけるために、重量測定ユニットに送り込まれる試料空気を、送り込む前の段階でヒータユニットにより加熱することにより、浮遊粒子状物質の周りの空気の相対湿度を低下させ、測定に供する試料空気の湿度を手分析の条件と一致させるようにしている。
【0006】
ちなみに、米国では、浮遊粒子状物質の標準測定方法(Federal Register Vol.62, No.138/Appendix L:略称FRM法)が制定されており、非常に多くの実験データが蓄積され、特に疫学用データとして有用性が高いものとなっている。
【0007】
FRM法による測定では、大気採取装置により、分級装置で分級して、FPを1日に一回程度、一定流量でフィルタ上に粒子状物質を採取し、その後人手により、フィルタを実験室に持ち帰り、制御設定温度15〜30°C(各制御設定温度における誤差範囲は±5°C)、制御設定相対湿度20%〜45%(各制御設定相対湿度における誤差範囲は±5%)、より好ましくは30〜40%、さらに好ましくは35%に保持された恒温、恒湿条件下で24時間程度のコンディショニングを行ったのち、精密天秤による重量濃度の測定が行われている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−147437号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記した特許文献1に記載の技術には以下のような問題があった。すなわち、特許文献1に記載の装置は、重量測定に供する試料空気をヒータユニットにより加熱乾燥させているので、浮遊粒子状物質を加熱してしまい、浮遊粒子状物質に含まれる揮発成分(水分の他、それ以外のアンモニア等の揮発成分)が揮発してしまい、当該装置による測定結果と手分析による測定結果が大きくずれてしまうという問題があった。
【0010】
本発明は、そのような実情に鑑みてなされたもので、浮遊粒子状物質の重量測定に供する試料空気を除湿する際、浮遊粒子状物質自身を加熱せずに乾燥させ、水分以外の揮発成分の揮発を抑える(平衡をずらさない)ことができる浮遊粒子状物質の測定装置およびこの測定装置に用いられる浮遊粒子状物質保存装置の提供を目的とする。
【課題を解決するための手段】
【0011】
第1の発明は、
粒径が所定値以下である微小粒子と粒径が上記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち上記微小粒子を捕集して、捕集した上記微小粒子の質量を測定する装置であって、
上記浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気から上記粗大粒子を除去して、上記微小粒子を含む微小粒子含有空気を得る分級手段と、
上記微小粒子含有空気に、上記浮遊粒子状物質を除去した乾燥空気を混合器で混ぜ合わせて混合空気を生成することにより、上記混合空気中の上記微小粒子を非加熱で除湿する乾燥手段と、
上記混合空気を第1のフィルタに導いて、上記微小粒子を当該第1のフィルタ上に捕集する捕集手段と、
上記第1のフィルタ上に捕集された上記微小粒子の重量を測定する重量測定手段と、を備えた浮遊粒子状物質測定装置である。
【0012】
第1の発明によれば、微小粒子含有空気に、浮遊粒子状物質を除去した乾燥空気を混ぜ合わせて混合空気を生成する。よって、浮遊粒子状物質の周りの空気の湿度を調節した空気(除湿空気)により、浮遊粒子状物質を加熱することなく、浮遊粒子状物質を調湿する。従って、微小粒子における水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分が揮発していない微小粒子を重量測定に供することができる。
【0013】
第2の発明は、第1の発明において、
上記混合空気の湿度を所定範囲内に制御する湿度制御手段をさらに備えたことを特徴とする。
【0014】
第2の発明によれば、混合空気の湿度を所定範囲内に制御することができる。
【0015】
第3の発明は、第2の発明において、
上記湿度制御手段は、
上記混合器に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段を含み、
上記大気測定手段で測定された湿度、温度、および圧力に基づいて、上記混合空気の湿度を上記所定範囲内にフィードバック制御することを特徴とする。
【0016】
第3の発明によれば、混合器に吸引される前の大気の湿度、温度、および圧力に基づいて、混合空気の湿度を正確に制御することができる。
【0017】
第4の発明は、第2の発明において、
上記湿度制御手段は、
上記分級手段に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段と、
上記混合空気の湿度が上記所定範囲内になるように、上記大気測定手段で測定された湿度および温度に基づいて、上記微小粒子含有空気に混ぜ合わせる上記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする。
【0018】
第4の発明によれば、分級手段に吸引される前の大気の湿度、温度、および圧力に基づいて、混合空気の湿度を正確に制御することができる。
【0019】
第5の発明は、第2の発明において、
上記湿度制御手段は、
上記微小粒子が上記第1のフィルタ上に捕集される直前或いは直後の上記混合空気の湿度、温度、および圧力を測定する除湿空気状態測定手段を含み、
上記除湿空気状態測定手段で測定された湿度、温度、および圧力に基づいて、上記混合空気の湿度を上記所定範囲内にフィードバック制御することを特徴とする。
【0020】
第5の発明によれば、微小粒子がフィルタ上に捕集される直前或いは直後の混合空気の湿度および温度を測定するので、重量測定の直前或いは直後における混合空気の湿度および温度を測定することができる。よって、混合空気の湿度をより正確に制御することができる。
【0021】
第6の発明は、第2の発明において、
上記湿度制御手段は、
上記微小粒子が上記第1のフィルタ上に捕集される直前或いは直後の上記混合空気の湿度、温度、および圧力を測定する除湿空気状態測定手段と、
上記混合空気の湿度が上記所定範囲内になるように、上記混合空気測定手段で測定された湿度、温度、および圧力に基づいて、上記微小粒子含有空気に混ぜ合わせる上記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする。
【0022】
第6の発明によれば、微小粒子がフィルタ上に捕集される直前或いは直後の混合空気の湿度および温度を測定するので、重量測定の直前或いは直後における混合空気の湿度および温度を測定することができる。よって、混合空気の湿度をより正確に制御することができる。
【0023】
第7の発明は、第1の発明において、
上記微小粒子が上記第1のフィルタ上に捕集された後の上記混合空気に対してさらなる除湿を行う第2の乾燥手段とをさらに備え、
上記乾燥空気は、上記微小粒子が上記フィルタ上に捕集された後の上記混合空気に対して上記第2の乾燥手段による処理がなされた後の空気であることを特徴とする。
【0024】
第7の発明によれば、微小粒子が捕集された後の混合空気を乾燥空気に変えて再利用することができる。
【0025】
第8の発明は、第1の発明において、
上記重量測定手段は、β線吸収法の重量測定手段であることを特徴とする。
【0026】
第8の発明によれば、任意の時間毎に連続的に微小粒子の重量測定をすることができる。重量測定を行う時間間隔は特に限定されないが、例えば1秒、或いは1分に設定することができる。
【0027】
第9の発明は、第1の発明において、
上記第1のフィルタはテープ状フィルタであり、
上記浮遊粒子状物質測定装置は、
上記第1のフィルタを所定のタイミングでその長さ方向に送るテープ送り機構をさらに備え、
上記テープ送り機構は、
未使用の上記第1のフィルタを供給する第1の送りリールと、
使用済みの上記第1のフィルタをロール状に巻回して収容する巻き取りリールとを含むことを特徴とする。
【0028】
第9の発明によれば、テープ状である第1のフィルタを所定のタイミングで長さ方向に送り、微小粒子を第1のフィルタ上に連続的に捕集することができる。
【0029】
第10の発明は、第9の発明において、
上記第1のフィルタにおける上記微小粒子が捕集された面に密着するようにカバーテープを供給する第2の送りリールをさらに備え、
上記巻き取りリールは、上記第1のフィルタと上記カバーテープが上記微小粒子を挟み込んだ状態で上記第1のフィルタと上記カバーテープを一緒に巻き取ることを特徴とする。
【0030】
第10の発明によれば、テープ状フィルタとカバーテープの間に微小粒子を挟み込んだ状態で当該テープ状フィルタとカバーテープを巻き取ることができる。これにより、テープ状フィルタ上に捕集した微小粒子を保存することができる。
【0031】
第11の発明は、第1の発明において、
上記捕集手段は、フィルタサンプリングと精密天秤による重量測定法と同じ時間帯に上記微小粒子を捕集することを特徴とする。
【0032】
第11の発明によれば、フィルタサンプリングと精密天秤による重量測定法と同じ時間帯に微小粒子を捕集するので、フィルタサンプリングと精密天秤による重量測定法に近い条件で重量測定を行うことができる。
【0033】
第12の発明は、
捕集した浮遊粒子状物質を保存する浮遊粒子状物質保存装置であって、
上記浮遊粒子状物質を捕集するテープ状フィルタと、
上記テープ状フィルタに捕集された上記浮遊粒子状物質を保護するカバーテープと、
上記テープ状フィルタおよび上記カバーテープをそれぞれ長さ方向に送るテープ送り機構とを備え、
上記テープ送り機構は、
未使用の上記テープ状フィルタを供給する第1の送りリールと、
上記テープ状フィルタにおける上記浮遊粒子状物質が捕集された面に密着するように上記カバーテープを供給する第2の送りリールと、
使用済みの上記テープ状フィルタと上記カバーテープが上記浮遊粒子状物質を挟み込んだ状態で当該テープ状フィルタと当該カバーテープを一緒にロール状に巻回して収容する巻き取りリールとを含むことを特徴とする浮遊粒子状物質保存装置である。
【0034】
第12の発明によれば、テープ状フィルタとカバーテープの間に浮遊粒子状物質を挟み込んだ状態で当該テープ状フィルタとカバーテープを巻き取ることができる。これにより、テープ状フィルタ上に捕集した浮遊粒子状物質を保存することができる。浮遊粒子状物質は、微小粒子、粗大粒子、またはその双方のいずれであってもよい。
【発明の効果】
【0035】
本発明によれば、浮遊粒子状物質の重量測定に供する空気を除湿する際、浮遊粒子状物質における水分以外の揮発成分の揮発を抑える(平衡をずらさない)ことができる浮遊粒子状物質の測定装置およびこの測定装置に用いられる浮遊粒子状物質保存装置を提供することができる。
【図面の簡単な説明】
【0036】
【図1】第1実施形態に係る浮遊粒子状物質の測定装置を示す図
【図2】混合器の一例を示す断面図
【図3】図1に示す測定装置の動作を示すフローチャート
【図4】第2実施形態に係る浮遊粒子状物質の測定装置を示す図
【図5】第3実施形態に係る浮遊粒子状物質の測定装置を示す図
【図6】第4実施形態に係る浮遊粒子状物質の測定装置を示す図
【図7】第5実施形態に係る浮遊粒子状物質の測定装置を示す図
【図8】図7に示す測定装置の動作を示すフローチャート
【図9】第7実施形態に係る浮遊粒子状物質の測定装置を示す図
【図10】フィルタに捕集された粒子状物質の重量の変化を示す図
【図11】粒子状物質の重量測定時の湿度の変化を示す図
【図12】外気の湿度とフィルタ付近の湿度を絶対湿度としてプロットした図
【発明を実施するための形態】
【0037】
(第1実施形態)
本発明の第1実施形態について、図面を参照しつつ説明する。図1は、第1実施形態に係る浮遊粒子状物質の測定装置を示す図である。
【0038】
第1実施形態に係る浮遊粒子状物質測定装置1は、粒径が所定値以下である微小粒子と粒径が上記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち上記微小粒子を捕集し、捕集した微小粒子の質量を測定する装置である。微小粒子と粗大粒子の境界となる上記所定値は特に限定されるものではないが、例えば、2.5μmとされる。
【0039】
浮遊粒子状物質測定装置1(以下、測定装置1と称することがある)は、分級手段2と、乾燥手段3と、捕集手段4と、重量測定手段5と、湿度制御手段11とを備えている。
【0040】
分級手段2は、浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気6中の浮遊粒子状物質を、分級比(質量基準)が50%となるような粒子の空気力学的粒径を閾値として、粒径が当該閾値以下の微小粒子と、粒径が当該閾値を超える粗大粒子とに分級する。上記閾値は特に限定されるものではないが、例えば、2.5μmとされる。分級手段2の種類は特に限定されるものではないが、例えば、インパクタ或いはサイクロンを分級手段として採用した場合、粗大粒子はその多くが慣性衝突によって試料大気から除去され、これにより、粗大粒子の多くが除去された微小粒子含有空気7を得る。また、バーチャルインパタを採用した場合には、分級手段2は、上記閾値を超える粒子を分級比で50%以上の割合(質量割合)で含む粗大粒子含有空気と、上記閾値以下の粒子を分級比で50%以上の割合(質量割合)で含む微小粒子含有空気7とに分ける。これによって、分級手段2は、サンプルインレット27で吸引される空気に含まれる浮遊粒子状物質を分級することができる。分級手段2における吸引力は、捕集手段4よりも下流側に設けられた試料捕集用吸引ポンプ25で発生させる。
【0041】
乾燥手段3は、微小粒子含有空気7に、浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気8を混合器45で混ぜ合わせて混合空気9を生成することにより、混合空気9中の微小粒子を非加熱で除湿する。乾燥手段3は、図1に示される例では、第2のフィルタ14と、ドライヤ用吸引ポンプ15と、ドライヤ16と、混合器17とを含んでいる。微小粒子含有空気7に乾燥空気8を混ぜ合わせることにより、混合空気9の湿度は微小粒子含有空気7の湿度よりも低くなり、除湿が行われる。ドライヤ16の種類は、非加熱方式のドライヤであれば特に限定されるものではないが、例えば、筒状容器(カラム)内にシリカゲル等の除湿材を封入した構造とすることができる。また、モリキュラーシーブスを2つのカラムに充填させ、一方のカラムで空気乾燥を行い、他方のカラムでモリキュラーシーブスの乾燥再生を行い、バルブの制御により、空気乾燥を行うカラムを交互に切替えながら連続的に空気乾燥(除湿)を行うヒートレスドライヤと呼ばれる自己再生式の除湿器を採用することもできる。
【0042】
第2のフィルタ14は、実質的に全ての浮遊粒子状物質を除去するフィルタである。ドライヤ用吸引ポンプ15は、大気を第2のフィルタ14に送り込み、第2のフィルタ14から出た清浄空気をドライヤ16に送り込み、ドライヤ16から出た乾燥空気8を混合器17に送り込む動力源である。混合器17は、微小粒子含有空気7と乾燥空気8を混合させる。混合器17の構造は特に限定されないが、例えばT字管であってもよい。或いは、混合器17は、図2に示されるものであってもよい。図2は、混合器17の一例を示す断面図である。図2に示される混合器17は、逆円錐状部45と、逆円錐状部45の大径側に連なる円筒状部46とを含む。円筒状部46の側面には、乾燥空気8を導入する管路47が接続されている。混合器17の中心軸上において円筒状部46と逆円錐状部45の境界付近には、試料大気7を導入する管路46の一端側開口部が位置している。逆円錐状部45の小径側には、混合空気9を捕集手段4に導く管路49が接続されている。管路47から導入された乾燥空気8と、管路48から導入された試料大気7は、逆円錐状部45内で均一に混合される。混合空気9は、管路49を経て捕集手段4へ導かれる。
【0043】
捕集手段4は、混合空気9を第1のフィルタ10に導いて、微小粒子を第1のフィルタ10上に捕集する。図1に示される例では、第1のフィルタ10はテープ状フィルタである。第1のフィルタ10は、捕集した微小粒子の質量分析に影響を与えない素材で構成されることが好ましく、例えば、テープ状のフッ素系メンブランフィルタで構成される。捕集手段4は、第1のフィルタ10と、第1のフィルタ10を所定のタイミングでその長さ方向に送るテープ送り機構18とを含む。第1のフィルタ10を送るタイミングは特に限定されないが、例えば、1分置き、或いは1時間置きとすることができる。
テープ送り機構18は、未使用の第1のフィルタ10を供給する第1の送りリール19と、使用済みの第1のフィルタ10をロール状に巻回して収容する巻き取りリール20とを含む。
捕集手段4は、フィルタサンプリングと精密天秤による重量測定法(手分析法)と同じ時間帯に微小粒子を捕集することが好ましい。
【0044】
重量測定手段5は、第1のフィルタ10上に捕集された微小粒子の重量を測定する。重量測定手段の種類は特に限定されるものではないが、例えば、従来公知のβ線吸収法を採用することができる。
【0045】
第1のフィルタ10の捕集位置には、β線源からβ線が照射され、透過したβ線量が、たとえば1分毎に連続的に検出される。検出結果は、CPU28に入力される。
【0046】
β線検出器(シンチレーションカウンタ)の検出結果と、第1のフィルタ10上の浮遊粒子状物質の量との関係は、式1で計算される。
Ij=Ij-1exp(−μΧ) (Χ:カイ) ・・・(式1)
【0047】
ここにIjは、ある瞬間に微小粒子を捕集した第1のフィルタ10を透過したβ線量であり、Ij-1はその1分前の同じ量である。μは比例定数であり、Χはフィルタの単位面積当たりの捕集した微小粒子の量(mg/cm2)である。μはβ線源に固有の値であり、標準物質によって予めcm2/mgの単位で求められる。
式1を変形して、式2を得る。
Χ=−ln(Ij/Ij-1)/μ ・・・(式2)
【0048】
式2からIjとIj-1との比を求めることによって、たとえば1分間に捕集されたフィルタの単位面積当たりの微小粒子の量が計算でき、これに捕集位置の面積を掛ければ、1分間に捕集された微小粒子の量(mg/min)が算出できる。さらに、算出した微小粒子の量(mg/min)を吸引流量(m3/min)で割れば、大気中の微小粒子の質量濃度(mg/m3)を求めることができる。
【0049】
このように、β線吸収法によって微小粒子の質量を測定することができる。
【0050】
湿度制御手段11は、混合空気9の湿度を所定範囲内に制御する。ここで言う「所定範囲」は、特に限定されるものではないが、例えば、FRM法によるコンディショニングで設定される値であり、相対湿度20%〜45%、より好ましくは30〜40%、さらに好ましくは35%である。図1に示される例では、湿度制御手段11は、大気測定手段12と、混合空気測定手段29と、流量制御手段13とを含む。
【0051】
大気測定手段12は、分級手段2に吸引される前の大気の相対湿度、温度、および圧力を測定する。つまり、測定装置1の外部における大気の相対湿度、温度、および圧力(気圧)を測定する。
【0052】
混合空気測定手段29は、混合空気9の温度および圧力を測定する。
【0053】
流量制御手段13は、混合空気9の湿度が上記所定範囲内になるように、大気測定手段12で測定された湿度、温度、および圧力に基づいて、微小粒子含有空気7に混ぜ合わせる乾燥空気8の量をフィードバック制御する。図1に示される例では、流量制御手段13は、CPU28と、流量センサ21と、電磁弁22と、流量センサ23と、電磁弁24とを含む。流量センサ21は、ドライヤ16に供給される空気の流量を測定する。電磁弁22は、ドライヤ16に供給される空気の流量を調節する。流量センサ23は、重量測定手段5で微小粒子の重量が測定された後の混合空気9の流量を測定する。電磁弁24は、重量測定手段5で微小粒子の重量が測定された後の混合空気9の流量を調節する。混合空気9は、重量測定手段5で微小粒子の重量が測定された後、第3のフィルタ26を経由して大気中に排出される。第3のフィルタ26は、混合空気9に含まれる実質的に全ての浮遊粒子状物質を除去する。
【0054】
次に、測定装置1の動作について、図3のフローチャートを参照しつつ説明する。図3は、測定装置1に取り込んだ空気の流れと、信号の流れを示す図である。実線の矢印は空気の流れを示し、破線の矢印は信号の流れを示している。
【0055】
まず、サンプルインレット27から試料大気が吸引される(ステップS1)。次いで、分級手段2は、吸引した試料大気を、微小粒子含有空気7と粗大粒子含有空気(図示せず)とに分級する(ステップS2)。次いで、混合器17は、微小粒子含有空気7に乾燥空気8を混合し、混合空気9を生成する(ステップS3、4)。次いで、捕集手段4は、第1のフィルタ10上に微小粒子を捕集する(ステップS5)。次いで、重量測定手段5は、β線吸収法により微小粒子の重量を測定する(ステップS6)。次いで、重量の測定を終えた混合空気9は、混合空気測定手段29により、温度および圧力が測定される(ステップS7)。次いで、重量の測定を終えた混合空気9は、第3のフィルタ26で残余の浮遊粒子状物質が除去される(ステップS8)。次いで、全ての浮遊粒子状物質が除去された混合空気9は、電磁弁24により流量が制御され、その流量は流量センサ23に検知される(ステップS9)。次いで、流量が検知された混合空気9は、吸引ポンプ25を介して測定装置1の外に排出される(ステップS10)。
【0056】
乾燥空気8の生成過程について説明する。まず、ドライヤ用吸引ポンプ15が大気を吸入する(ステップS11)。次いで、吸引された空気は第2のフィルタ14で全ての浮遊粒子状物質が除去され、清浄な空気となる(ステップS12)。大気測定手段12は、大気の相対湿度、温度および圧力を測定する(ステップS13)。CPU28は、ステップS7で測定された温度および圧力、並びに、ステップS13で測定された相対湿度、温度、および圧力に基づいて所定の演算を行い、制御信号を生成する(ステップS14)。上記ステップS12の後、清浄な空気は電磁弁22で流量が制御され、流量は流量センサ21で検知される(ステップS15)。電磁弁22の開度の制御は、ステップS14で生成された制御信号に基づいて行われる。次いで、電磁弁22で流量が制御された清浄空気は、ドライヤ16で、加熱されることなく水分が除去されて乾燥空気となる(ステップS16)。次いで、乾燥空気は、上記ステップS3で述べたように、微小粒子含有空気7と混合される。
【0057】
ここで、ステップS15においてCPU28が行う演算について説明する。
試料大気6、乾燥空気8、混合後の空気(制御開始時)、混合後の空気(制御後)について、それぞれの質量流量V、水分の絶対濃度c、相対湿度rh、温度t、絶対圧力pを表す文字を、以下の表1に示す。
【0058】
【表1】
【0059】
図1に示される測定装置1では、CPU28が測定装置1の外部における大気の湿度、温度、および圧力、並びに、混合空気9の温度および圧力に基づいて混合空気9の相対湿度を計算し、混合空気9の湿度制御を行う。CPU28の指示の下、試料大気の流量v1が固定され、乾燥空気8の流量v2が調節されることで、混合空気9の相対湿度は所定値に制御される。そのことを以下に説明する。
【0060】
試料大気6における水分の絶対濃度は以下の式3で表される。
c1=f1(rh1,t1,p1) ・・・(式3)
混合空気9(制御開始時)の質量流量は以下の式4で表される。
v3=v1+v2 ・・・(式4)
混合空気9(制御開始時)における水分の絶対濃度は以下の式5で表される。
c3=(c1×v1+c2×v2)/v3 ・・・(式5)
乾燥空気8中の水分量が十分少ないとすれば、
c1>>c2で、c1×v1>>c2×v2となり、式3は以下の式6に変形することができる。
c3=(c1×v1)/(v1+v2) ・・・(式6)
混合空気9(制御開始時)の相対湿度は以下の式7で表される。
rh3=f2(c3,t3,p3) ・・・(式7)
式7に、式6で求めたc3、および測定したt3およびp3を代入することにより、混合空気9(制御開始時)の相対湿度rh3が求まる。よって、rh3が目的のrh3’となるように流量v2を調節すればよい。
以上が、測定装置1の動作である。
【0061】
以上説明したように、測定装置1によれば、微小粒子含有空気7に、浮遊粒子状物質を除去した乾燥空気8を混ぜ合わせて混合空気9を生成するので、加熱手段を用いることなく、湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子を加熱することなく除湿することができる。これにより、微小粒子に含まれる揮発成分(水分以外のアンモニア等の揮発成分)の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0062】
(第2実施形態)
本発明の第2実施形態について、図面を参照しつつ説明する。図4は、第2実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第1実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0063】
第2実施形態に係る浮遊粒子状物質測定装置30では、第1実施形態における大気測定手段12および混合空気測定手段29に代えて、それぞれ、大気測定手段31および混合空気測定手段32が設けられている。また、第2実施形態では、CPU28で行われる演算が、第1実施形態とは異なっている。その他の構成は第1実施形態と同様である。
【0064】
大気測定手段31は、分級手段2に吸引される前の大気の温度および圧力を測定する。つまり、測定装置1の外部における大気の温度および圧力を測定し、湿度は測定しない。
【0065】
混合空気測定手段29は、混合空気9の相対湿度、温度、および圧力を測定する。
【0066】
第2実施形態で行われるCPU28の演算について、以下に説明する。
【0067】
図4に示される測定装置30では、CPU28が測定装置30の外部における大気の温度および圧力、並びに、混合空気9の相対湿度、温度および圧力に基づいて混合空気9の相対湿度を計算し、混合空気9の湿度制御を行う。CPU28の指示の下、試料大気の流量v1が固定され、乾燥空気8の流量v2が調節されることで、混合空気9の相対湿度は所定値に制御される。そのことを以下に説明する。
【0068】
混合空気9(制御開始時)の質量流量は以下の式8で表される。
v3=v1+v2 ・・・(式8)
混合空気9(制御開始時)における水分の絶対濃度は以下の式9で表される。
c3=(c1×v1+c2×v2)/v3 ・・・(式9)
乾燥空気8中の水分量が十分少ないとすれば、
c1>>c2で、c1×v1>>c2×v2となり、式9は以下の式10に変形することができる。
c1=c3×(v1+c2)/v1 ・・・(式10)
試料大気の相対湿度は以下の式11で表される。
rh1=f2(c1,t1,p1) ・・・(式11)
式11に、式10で求めたc1、および測定したt1およびp1を代入することにより、試料大気6の相対湿度rh1が求まる。
相対湿度rh1、並びに、測定したt3およびp3を上記した式3に代入することにより、c1が求まる。その後、第1実施形態と同様に、式4〜7を用いて計算を行うことにより、相対湿度rh3が求まる。よって、rh3が目的のrh3’となるように流量v2を調節すればよい。
【0069】
測定装置30によれば、微小粒子含有空気7に、浮遊粒子状物質を除去した乾燥空気8を混ぜ合わせて混合空気9を生成するので、加熱手段を用いることなく、湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子を加熱することなく除湿することができる。これにより、微小粒子に含まれる水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0070】
(第3実施形態)
本発明の第3実施形態について、図面を参照しつつ説明する。図5は、第3実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第1実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0071】
第3実施形態に係る浮遊粒子状物質測定装置33では、第1実施形態における混合空気測定手段29に代えて、混合空気測定手段32が設けられている。また、第3実施形態では、CPU28で行われる演算が、第1実施形態とは異なっている。その他の構成は第1実施形態と同様である。
【0072】
混合空気測定手段32は、混合空気9の相対湿度、温度、および圧力を測定する。
【0073】
第3実施形態で行われるCPU28の演算について、以下に説明する。
【0074】
図5に示される測定装置33では、CPU28が測定装置33の外部における大気の相対湿度、温度および圧力、並びに、混合空気9の相対湿度、温度および圧力に基づいて、乾燥空気8における水分の絶対濃度を計算し、乾燥空気8の流量を調節して、混合空気9の湿度制御を行う。CPU28の指示の下、試料大気の流量v1が固定され、乾燥空気8の流量v2が調節されることで、混合空気9の相対湿度は所定値に制御される。そのことを以下に説明する。
【0075】
試料大気6における水分の絶対濃度は以下の式12で表される。
c1=f1(rh1,t1,p1) ・・・(式12)
混合空気9(制御開始時)における水分の絶対濃度は以下の式13で表される。
c3=f1(rh3,t3,p3)
=(c1×v1+c2×v2)/v3 ・・・(式13)
混合空気9(制御開始時)の質量流量は以下の式14(式4と同じ)で表される。
v3=v1+v2 ・・・(式14)
混合空気9(制御開始時)の相対湿度は以下の式15(式6と同じ)で表される。
rh3=f2(c3,t3,p3) ・・・(式15)
式11を変形してc2について求めると、式16となる。
c2=(c3×v3−c1×v1)/v2 ・・・(式16)
式15のc3に式13を代入し、rh3が目的のrh3’となるようなc2およびv2を求め、そのv2の値に乾燥空気8の流量を調節すればよい。
【0076】
測定装置33によれば、微小粒子含有空気7に、浮遊粒子状物質を除去した乾燥空気8を混ぜ合わせて混合空気9を生成するので、加熱手段を用いることなく、湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子を加熱することなく除湿することができる。これにより、微小粒子に含まれる水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0077】
(第4実施形態)
本発明の第4実施形態について、図面を参照しつつ説明する。図6は、第4実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第3実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0078】
第4実施形態に係る浮遊粒子状物質測定装置39が第3実施形態と異なる点は、第3実施形態のように重量測定を終えた混合空気9を外部に排気するのではなく、重量測定を終えた混合空気9に再度乾燥処理を施してから混合器17に戻すようにした点である。詳細を以下に説明する。
【0079】
第4実施形態では、図6に示されるように、第2のフィルタ34と、第2の乾燥手段35と、流量制御手段36とを備えている。
【0080】
第2のフィルタ34は、微小粒子が第1のフィルタ10上に捕集された後の混合空気9に対して浮遊粒子状物質のさらなる除去を行う。
【0081】
第2の乾燥手段35は、微小粒子が第1のフィルタ10上に捕集された後の混合空気9に対してさらなる除湿を行う。
【0082】
流量制御手段36は、混合空気9の湿度が上記所定範囲内になるように、大気測定手段12で測定された湿度、温度、および圧力、並びに、混合空気測定手段29で測定された混合空気9の湿度、温度、および圧力に基づいて、微小粒子含有空気7に混ぜ合わせる乾燥空気8の量をフィードバック制御する。図6に示される例では、流量制御手段36は、CPU28と、流量センサ38と、電磁弁37と、流量センサ23と、電磁弁24とを含む。流量センサ38は、ドライヤ16に供給される空気の流量を測定する。電磁弁37は、ドライヤ16に供給される空気の流量を調節する。混合空気9の一部は、フィルタ処理と乾燥処理を経た後に混合器17に戻され、残りの空気は、重量測定手段5で微小粒子の重量が測定された後、第3のフィルタ26を経由して大気中に排出される。
【0083】
従って、混合器17に供給される乾燥空気8は、微小粒子が第1のフィルタ10上に捕集された後の混合空気9に対して第2のフィルタ34および第2の乾燥手段35による処理がなされた後の空気である。つまり、重量測定手段5を通過した混合空気9にフィルタ処理と乾燥処理(加熱しない乾燥処理)を施すことにより、混合空気を乾燥空気に変えて再利用する。
【0084】
測定装置39によれば、混合空気9を乾燥空気に変えて再利用するので、乾燥に用いられるエネルギーの無駄を省くことができる。
【0085】
(第5実施形態)
本発明の第5実施形態について、図面を参照しつつ説明する。図7は、第5実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第4実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0086】
第5実施形態に係る浮遊粒子状物質測定装置40が第4実施形態と異なる点は、ドライヤ16に代えてドライヤ41が設けられている点と、流量センサ23がドライヤ41に接続され、試料捕集用吸引ポンプ25がドライヤ41に接続されている点であり、その他の構成は第4実施形態と同様である。重量測定を終えた混合空気9は、ドライヤ41で再度乾燥処理を施してから混合器17に戻すようにしている。以下、詳細に説明する。
【0087】
ドライヤ41は、内筒体と外筒体とを含む2重筒構造体である。内筒体の一端部はドライヤ用吸引ポンプ15に接続され、他端部は混合器17に接続されている。内筒体は、半透膜除湿材で構成されている。このため、内筒体は、その内側の気圧が外側の気圧よりも高い場合、内側を流れる空気の水分を吸収し、吸収した水分を外側へ放出する。半透膜除湿材の種類は特に限定されないが、例えば、パーマピュア社製のナフィオン(登録商標)・チューブを使用することができる。ナフィオン(登録商標)・チューブは、テトラ・フロオロエチレンとパーフルオロ−3,6−ジオキサ−4−メチル−7−オクテン−サルフォニック酸の重合体で構成されている。外筒体の一端部の側面には、流量センサ23が接続され、他端部の側面には、試料捕集用吸引ポンプ25が接続されている。このような構造とすることにより、内筒体内を流れる相対的に高い圧力の空気から水分が吸収され、その水分は試料捕集用吸引ポンプ25から排出される。よって、ドライヤ41は混合空気9から、さらに水分が除去された乾燥空気8を生成することができる。
【0088】
次に、測定装置40の動作について、図8のフローチャートを参照しつつ説明する。図8は、測定装置40に取り込んだ空気の流れと、信号の流れを示す図である。実線の矢印は空気の流れを示し、破線の矢印は信号の流れを示している。
【0089】
まず、サンプルインレット27から試料大気が吸引される(ステップS1)。次いで、分級手段2は、吸引した試料大気を、微小粒子含有空気7と粗大粒子含有空気(図示せず)とに分級する(ステップS2)。次いで、混合器17は、微小粒子含有空気7に乾燥空気8を混合し、混合空気9を生成する(ステップS3、4)。次いで、捕集手段4は、第1のフィルタ10上に微小粒子を捕集する(ステップS5)。次いで、重量測定手段5は、β線吸収法により微小粒子の重量を測定する(ステップS6)。次いで、重量の測定を終えた混合空気9は、混合空気測定手段29により、温度および圧力が測定される(ステップS7)。CPU28は、ステップS7で測定された温度および圧力、並びに、ステップS8で測定された相対湿度、温度、および圧力に基づいて所定の演算を行い、制御信号を生成する(ステップS9)。ステップS7で温度等の測定を終えた混合空気9は分岐され、一方の空気は第2のフィルタ34へ導かれ、他方の空気は第3のフィルタ26に導かれる(ステップS10)。第2のフィルタ34に導かれた混合空気9は、第2のフィルタ34で全ての浮遊粒子状物質が除去され、清浄な空気となる(ステップS11)。次いで、清浄な空気は、電磁弁22で流量が制御され、流量は流量センサ21で検知される(ステップS12)。清浄な空気はドライヤポンプ15で吸引され(ステップS13)、ドライヤ41の内筒体内に導かれる(ステップS14)。ステップS10で第3のフィルタ26に導かれた混合空気9は、第3のフィルタ26で全ての浮遊粒子状物質が除去され、清浄な空気となる(ステップS15)。次いで、清浄な空気は、電磁弁24で流量が制御され、流量は流量センサ23で検知される(ステップS16)。清浄な空気は、ドライヤ41の外筒体と内筒体の間に導かれる(ステップS17)。外筒体と内筒体の間に導かれた清浄な空気は、試料捕集用吸引ポンプ25で吸引され、外部に排出される(ステップS16)。ステップS14、17において、内筒体内を流れる清浄な空気は、加熱されることなく除湿されて乾燥空気となる。乾燥空気は、上記ステップS3で微小粒子含有空気7と混合される。
以上が、測定装置40の動作である。
【0090】
測定装置40によれば、微小粒子含有空気7に、浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気8を混ぜ合わせて混合空気9を生成するので、浮遊粒子状物質を加熱することなく、浮遊粒子状物質の周りの空気の湿度を低減した空気(除湿空気)を生成することができる。従って、微小粒子における水分以外の揮発成分の揮発を抑え(平衡をずらさない)、水分以外の揮発成分の揮発していない微小粒子を重量測定に供することができる。
【0091】
(第6実施形態)
本発明の第6実施形態について、図面を参照しつつ説明する。図9は、第6実施形態に係る浮遊粒子状物質の測定装置を示す図である。なお、第5実施形態と同様の構成については、同一の参照符号を付してその説明を省略する。
【0092】
第6実施形態に係る浮遊粒子状物質の測定装置42が第5実施形態と異なる点は、第1のフィルタ10上に捕集された微小粒子を保存できるようにした点である。
【0093】
測定装置42は、第2の送りリール43を備えている。第2の送りリール43は、第1のフィルタ10における微小粒子が捕集された面に密着するようにカバーテープ44を供給する。
【0094】
巻き取りリール20は、第1のフィルタ10とカバーテープ44が微小粒子を挟み込んだ状態で第1のフィルタ10とカバーテープ44を一緒に巻き取る。第1のフィルタ10とカバーテープ44は、例えば同じ帯幅に形成される。カバーテープ44の種類は特に限定されないが、微小粒子の成分に変動を与えにくい素材で形成される。
【0095】
測定装置42によれば、第1のフィルタ10とカバーテープ44が微小粒子を挟み込んだ状態で第1のフィルタ10とカバーテープ44を一緒に巻き取ることにより、重量測定後の微小粒子を保存することができる。保存された微小粒子は、組成分析等に供されることができる。
【0096】
(その他の実施形態)
なお、上記各実施形態では、上記各式を用いた計算により、目的とする相対湿度の混合空気9を得るようにしているが、乾燥空気8の流量v2を試行錯誤的に変化させ、混合空気9の相対湿度が目的とする相対湿度に収束するようにしてもよい。
【0097】
次に、本発明の効果について、図10〜12を参照しつつ説明する。
図10〜12は、昼の12時から次の日の11時まで大気中の浮遊粒子状物質を測定した時の時系列データを示す図である。
【0098】
図10は、フィルタに捕集された粒子状物質の重量の変化を示したものである。本発明に係る湿度制御機能付きの装置で測定を行うと同時に、湿度制御機能のない装置でも並行して比較計測を行った。さらに、サンプラを用いて従来行われてきたの手分析法による測定値と比較した。
【0099】
図10を見ると、湿度制御機能付きの装置(A)が最終的に手分析法による重量値(●印)に近く、重量変動も小さいことがわかる。これに対して、湿度制御を行わなかった装置(B)は、変動が大きく、特に夜間に重量が増大し、明け方から昼にかけて重量がほとんど変化しない傾向が顕見られた。これは、気温が低下して湿度が高くなる夜間に、フィルタに捕集された粒子状物質が大気中の水分を吸収し、逆に、気温が上昇して湿度が低下する昼には、夜間に蓄積した水分を放出するため、重量が大きく変動するものと考えられる。測定時の湿度の変化(図11参照)を見ても、そのことがよく分かる。
【0100】
図12は、外気の湿度とフィルタ付近の湿度を絶対湿度としてプロットしたものであるが、湿度制御により、乾燥空気を混ぜることで湿度が低く保たれていることが分かる。
【0101】
以上より、湿度制御を行い、湿度を低く保ちながら測定することで、試料大気の湿度の影響を抑えながら影響粒子状物質を連続的に測定することが、従来の手分析法に代わる自動測定器を開発する上で有効な手段であると考えられる。
【0102】
また、本発明に係る測定装置は、大気試料を加熱することなく湿度制御を行うため、水以外の揮発性成分を過度に損失することなく測定ができる装置でもある。
【産業上の利用可能性】
【0103】
本発明は、人の健康に影響の大きい微小浮遊粒子状物質の連続測定装置等として利用可能である。
【符号の説明】
【0104】
1,30,33,39,40,42 浮遊粒子状物質測定装置
2 分析手段
3 乾燥手段
4 捕集手段
5 重量測定手段
6 試料大気
7 微小粒子含有空気
8 乾燥空気
9 混合空気
10 第1のフィルタ
11 湿度制御手段
12,31 大気測定手段
13,36 流量制御手段
14,34 第2のフィルタ
15 ドライヤ用吸引ポンプ
16,41 ドライヤ
17 混合器
18 テープ送り機構
19 第1の送りリール
20 巻き取りリール
21,23,38 流量センサ
22,24,37 電磁弁
25 試料捕集用吸引ポンプ
26 第3のフィルタ
27 サンプルインレット
28 CPU
29,32 混合空気測定手段
35 第2の乾燥手段
43 第2の送りリール
44 カバーテープ
45 逆円錐状部
46 円筒状部
47,48,49 管路
【特許請求の範囲】
【請求項1】
粒径が所定値以下である微小粒子と粒径が前記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち前記微小粒子を捕集して、捕集した前記微小粒子の質量を測定する装置であって、
前記浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気から前記粗大粒子を除去して、前記微小粒子を含む微小粒子含有空気を得る分級手段と、
前記微小粒子含有空気に、前記浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気を混合器で混ぜ合わせて混合空気を生成することにより、前記混合空気中の前記微小粒子を非加熱で除湿する乾燥手段と、
前記混合空気を第1のフィルタに導いて、前記微小粒子を当該第1のフィルタ上に捕集する捕集手段と、
前記第1のフィルタ上に捕集された前記微小粒子の重量を測定する重量測定手段と、を備えた浮遊粒子状物質測定装置。
【請求項2】
前記混合空気の湿度を所定範囲内に制御する湿度制御手段をさらに備えたことを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項3】
前記湿度制御手段は、
前記混合器に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段を含み、
前記大気測定手段で測定された湿度、温度、および圧力に基づいて、前記混合空気の湿度を前記所定範囲内にフィードバック制御することを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項4】
前記湿度制御手段は、
前記分級手段に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段と、
前記混合空気の湿度が前記所定範囲内になるように、前記大気測定手段で測定された湿度および温度に基づいて、前記微小粒子含有空気に混ぜ合わせる前記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項5】
前記湿度制御手段は、
前記微小粒子が前記第1のフィルタ上に捕集される直前或いは直後の前記混合空気の湿度、温度、および圧力を測定する除湿空気状態測定手段を含み、
前記除湿空気状態測定手段で測定された湿度、温度、および圧力に基づいて、前記混合空気の湿度を前記所定範囲内にフィードバック制御することを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項6】
前記湿度制御手段は、
前記微小粒子が前記第1のフィルタ上に捕集される直前或いは直後の前記混合空気の湿度、温度、および圧力を測定する混合空気測定手段と、
前記混合空気の湿度が前記所定範囲内になるように、前記混合空気測定手段で測定された湿度、温度、および圧力に基づいて、前記微小粒子含有空気に混ぜ合わせる前記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項7】
前記微小粒子が前記フィルタ上に捕集された後の前記混合空気に対してさらなる除湿を行う第2の乾燥手段をさらに備え、
前記乾燥空気は、前記微小粒子が前記第1のフィルタ上に捕集された後の前記混合空気に対して前記第2の乾燥手段による処理がなされた後の空気であることを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項8】
前記重量測定手段は、β線吸収法の重量測定手段であることを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項9】
前記第1のフィルタはテープ状フィルタであり、
前記浮遊粒子状物質測定装置は、
前記第1のフィルタを所定のタイミングでその長さ方向に送るテープ送り機構をさらに備え、
前記テープ送り機構は、
未使用の前記第1のフィルタを供給する第1の送りリールと、
使用済みの前記第1のフィルタをロール状に巻回して収容する巻き取りリールとを含むことを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項10】
前記第1のフィルタにおける前記微小粒子が捕集された面に密着するようにカバーテープを供給する第2の送りリールをさらに備え、
前記巻き取りリールは、前記第1のフィルタと前記カバーテープが前記微小粒子を挟み込んだ状態で前記第1のフィルタと前記カバーテープを一緒に巻き取ることを特徴とする請求項9に記載の浮遊粒子状物質測定装置。
【請求項11】
前記捕集手段は、フィルタサンプリングと精密天秤による重量測定法と同じ時間帯に前記微小粒子を捕集することを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項12】
捕集した浮遊粒子状物質を保存する浮遊粒子状物質保存装置であって、
前記浮遊粒子状物質を捕集するテープ状フィルタと、
前記テープ状フィルタに捕集された前記浮遊粒子状物質を保護するカバーテープと、
前記テープ状フィルタおよび前記カバーテープをそれぞれ長さ方向に送るテープ送り機構とを備え、
前記テープ送り機構は、
未使用の前記テープ状フィルタを供給する第1の送りリールと、
前記テープ状フィルタにおける前記浮遊粒子状物質が捕集された面に密着するように前記カバーテープを供給する第2の送りリールと、
使用済みの前記テープ状フィルタと前記カバーテープが前記浮遊粒子状物質を挟み込んだ状態で当該テープ状フィルタと当該カバーテープを一緒にロール状に巻回して収容する巻き取りリールとを含むことを特徴とする浮遊粒子状物質保存装置。
【請求項1】
粒径が所定値以下である微小粒子と粒径が前記所定値を超える粗大粒子とからなる、大気中の浮遊粒子状物質のうち前記微小粒子を捕集して、捕集した前記微小粒子の質量を測定する装置であって、
前記浮遊粒子状物質を含む試料大気を吸引し、吸引した試料大気から前記粗大粒子を除去して、前記微小粒子を含む微小粒子含有空気を得る分級手段と、
前記微小粒子含有空気に、前記浮遊粒子状物質が除去され非加熱乾燥処理で生成された乾燥空気を混合器で混ぜ合わせて混合空気を生成することにより、前記混合空気中の前記微小粒子を非加熱で除湿する乾燥手段と、
前記混合空気を第1のフィルタに導いて、前記微小粒子を当該第1のフィルタ上に捕集する捕集手段と、
前記第1のフィルタ上に捕集された前記微小粒子の重量を測定する重量測定手段と、を備えた浮遊粒子状物質測定装置。
【請求項2】
前記混合空気の湿度を所定範囲内に制御する湿度制御手段をさらに備えたことを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項3】
前記湿度制御手段は、
前記混合器に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段を含み、
前記大気測定手段で測定された湿度、温度、および圧力に基づいて、前記混合空気の湿度を前記所定範囲内にフィードバック制御することを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項4】
前記湿度制御手段は、
前記分級手段に吸引される前の大気の湿度、温度、および圧力を測定する大気測定手段と、
前記混合空気の湿度が前記所定範囲内になるように、前記大気測定手段で測定された湿度および温度に基づいて、前記微小粒子含有空気に混ぜ合わせる前記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項5】
前記湿度制御手段は、
前記微小粒子が前記第1のフィルタ上に捕集される直前或いは直後の前記混合空気の湿度、温度、および圧力を測定する除湿空気状態測定手段を含み、
前記除湿空気状態測定手段で測定された湿度、温度、および圧力に基づいて、前記混合空気の湿度を前記所定範囲内にフィードバック制御することを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項6】
前記湿度制御手段は、
前記微小粒子が前記第1のフィルタ上に捕集される直前或いは直後の前記混合空気の湿度、温度、および圧力を測定する混合空気測定手段と、
前記混合空気の湿度が前記所定範囲内になるように、前記混合空気測定手段で測定された湿度、温度、および圧力に基づいて、前記微小粒子含有空気に混ぜ合わせる前記乾燥空気の量をフィードバック制御する流量制御手段とを含むことを特徴とする請求項2に記載の浮遊粒子状物質測定装置。
【請求項7】
前記微小粒子が前記フィルタ上に捕集された後の前記混合空気に対してさらなる除湿を行う第2の乾燥手段をさらに備え、
前記乾燥空気は、前記微小粒子が前記第1のフィルタ上に捕集された後の前記混合空気に対して前記第2の乾燥手段による処理がなされた後の空気であることを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項8】
前記重量測定手段は、β線吸収法の重量測定手段であることを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項9】
前記第1のフィルタはテープ状フィルタであり、
前記浮遊粒子状物質測定装置は、
前記第1のフィルタを所定のタイミングでその長さ方向に送るテープ送り機構をさらに備え、
前記テープ送り機構は、
未使用の前記第1のフィルタを供給する第1の送りリールと、
使用済みの前記第1のフィルタをロール状に巻回して収容する巻き取りリールとを含むことを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項10】
前記第1のフィルタにおける前記微小粒子が捕集された面に密着するようにカバーテープを供給する第2の送りリールをさらに備え、
前記巻き取りリールは、前記第1のフィルタと前記カバーテープが前記微小粒子を挟み込んだ状態で前記第1のフィルタと前記カバーテープを一緒に巻き取ることを特徴とする請求項9に記載の浮遊粒子状物質測定装置。
【請求項11】
前記捕集手段は、フィルタサンプリングと精密天秤による重量測定法と同じ時間帯に前記微小粒子を捕集することを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項12】
捕集した浮遊粒子状物質を保存する浮遊粒子状物質保存装置であって、
前記浮遊粒子状物質を捕集するテープ状フィルタと、
前記テープ状フィルタに捕集された前記浮遊粒子状物質を保護するカバーテープと、
前記テープ状フィルタおよび前記カバーテープをそれぞれ長さ方向に送るテープ送り機構とを備え、
前記テープ送り機構は、
未使用の前記テープ状フィルタを供給する第1の送りリールと、
前記テープ状フィルタにおける前記浮遊粒子状物質が捕集された面に密着するように前記カバーテープを供給する第2の送りリールと、
使用済みの前記テープ状フィルタと前記カバーテープが前記浮遊粒子状物質を挟み込んだ状態で当該テープ状フィルタと当該カバーテープを一緒にロール状に巻回して収容する巻き取りリールとを含むことを特徴とする浮遊粒子状物質保存装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−13157(P2011−13157A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−159089(P2009−159089)
【出願日】平成21年7月3日(2009.7.3)
【出願人】(591081321)紀本電子工業株式会社 (19)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年7月3日(2009.7.3)
【出願人】(591081321)紀本電子工業株式会社 (19)
[ Back to top ]