
浮遊粒子状物質測定装置及び浮遊粒子状物質測定方法
【課題】浮遊粒子状物質測定装置及び浮遊粒子状物質測定方法において、浮遊粒子状物質の粒径分布を簡便に測定できるようにすること。
【解決手段】大気中で放電を生じさせる放電針3と、大気に含まれる浮遊粒子状物質Pが流通する第1のメッシュ電極4と、第1のメッシュ電極4と比較して放電針3から離れて設けられ、浮遊粒子状物質Pが流通する第2のメッシュ電極5と、第2のメッシュ電極5と比較して放電針3から離れて設けられ、浮遊粒子状物質Pが付着するQCMセンサ6と、放電針3と第1のメッシュ電極4との間、第1のメッシュ電極4と第2のメッシュ電極5との間、及び第2のメッシュ電極5とQCMセンサ6との間の各々に電位差を与える電圧発生部11と、QCMセンサ6の共振周波数の変化に基づいて浮遊粒子状物質Pの粒径分布を測定する測定部12aとを有する浮遊粒子状物質測定装置による。
【解決手段】大気中で放電を生じさせる放電針3と、大気に含まれる浮遊粒子状物質Pが流通する第1のメッシュ電極4と、第1のメッシュ電極4と比較して放電針3から離れて設けられ、浮遊粒子状物質Pが流通する第2のメッシュ電極5と、第2のメッシュ電極5と比較して放電針3から離れて設けられ、浮遊粒子状物質Pが付着するQCMセンサ6と、放電針3と第1のメッシュ電極4との間、第1のメッシュ電極4と第2のメッシュ電極5との間、及び第2のメッシュ電極5とQCMセンサ6との間の各々に電位差を与える電圧発生部11と、QCMセンサ6の共振周波数の変化に基づいて浮遊粒子状物質Pの粒径分布を測定する測定部12aとを有する浮遊粒子状物質測定装置による。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、浮遊粒子状物質測定装置及び浮遊粒子状物質測定方法に関する。
【背景技術】
【0002】
大気中には人間の健康に影響を及ぼす様々な浮遊粒子状物質(SPM: Suspended Particulate Matter)が存在する。
【0003】
浮遊粒子状物質には、自然界に由来するものと、工場やディーゼルエンジンの排ガスに含まれる人工的なものとがあるが、前者と後者とでは粒径分布が異なる。よって、大気中の浮遊粒子状物質をモニタリングしてその粒径分布を測定すれば、浮遊粒子状物質が自然界に由来するものなのか或いは人工的なものなのかを判別でき、大気環境を知るための判断材料を得ることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−257873号公報
【特許文献2】国際公開第2009/057256号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0005】
浮遊粒子状物質測定装置及び浮遊粒子状物質測定方法において、浮遊粒子状物質の粒径分布を簡便に測定できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
以下の開示によれば、大気中で放電を生じさせる放電針と、前記放電針の先端から間隔をおいて設けられ、前記大気に含まれる浮遊粒子状物質が流通する第1のメッシュ電極と、前記第1のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記浮遊粒子状物質が流通する第2のメッシュ電極と、前記第2のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記第2のメッシュ電極を流通した前記浮遊粒子状物質が付着するQCMセンサと、前記放電針と前記第1のメッシュ電極との間、前記第1のメッシュ電極と前記第2のメッシュ電極との間、及び前記第2のメッシュ電極と前記QCMセンサとの間の各々に電位差を与える電圧発生部と、前記浮遊粒子状物質の付着に伴う前記QCMセンサの共振周波数の変化に基づいて、前記浮遊粒子状物質の粒径分布を測定する測定部とを有する浮遊粒子状物質測定装置が提供される。
【0007】
また、その開示の他の観点によれば、大気中の一部領域において、該大気に含まれる浮遊粒子状物質を帯電させるステップと、前記一部領域と、該一部領域から間隔をおいて設けられたQCMセンサとの間に電位差を付与することにより、帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップと、前記電位差を付与してからの経過時間を前記浮遊粒子状物質の粒径に対応付けると共に、前記経過時間に伴う前記QCMセンサの共振周波数の変化をモニタすることにより、前記浮遊粒子状物質の粒径分布を測定するステップとを有する浮遊粒子状物質測定方法が提供される。
【発明の効果】
【0008】
以下の開示によれば、浮遊粒子状物質がその粒径によってQCMセンサに到達する時間が異なることを利用することで、電位差を付与してからの経過時間に基づいてその粒径の分布を簡単に測定することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、第1実施形態に係る浮遊粒子状物質測定装置の構成図である。
【図2】図2は、第1実施形態に係る発振回路の回路図である。
【図3】図3(a)、(b)は、第1実施形態に係る浮遊粒子状物質測定装置の動作原理について説明するための模式図(その1)である。
【図4】図4(a)、(b)は、第1実施形態に係る浮遊粒子状物質測定装置の動作原理について説明するための模式図(その2)である。
【図5】図5は、第1実施形態に係る共振周波数の時間微分の一例を示すグラフである。
【図6】図6は、第1実施形態において得られた浮遊粒子状物質の粒径分布を模式的に示すグラフである。
【図7】図7は、浮遊粒子状物質の実際の粒径分布の一例を示す図である。
【図8】図8は、第1実施形態に係る浮遊粒子状物質測定方法のフローチャートである。
【図9】図9は、第2実施形態に係る浮遊粒子状物質測定装置の構成図である。
【発明を実施するための形態】
【0010】
(第1実施形態)
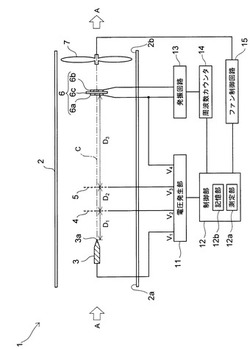
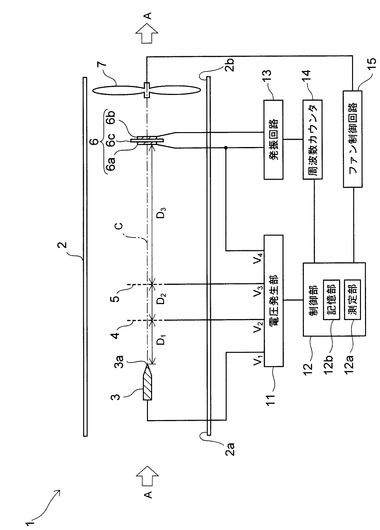
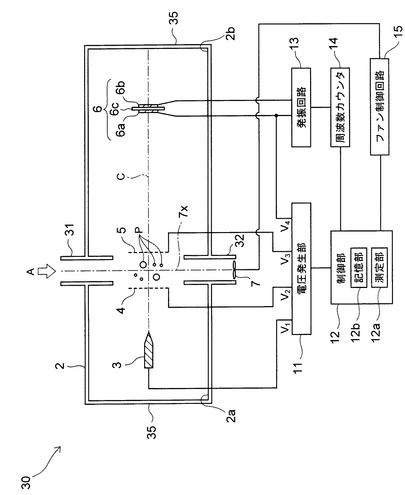
図1は、本実施形態に係る浮遊粒子状物質測定装置の構成図である。
【0011】
この浮遊粒子状物質測定装置1は、放電針3と、第1のメッシュ電極4と、第2のメッシュ電極5と、QCM(Quartz Crystal Microbalance)センサ6とを有する。
【0012】
このうち、放電針3は、タングステン等の金属を材料とするものであって、コロナ放電を生じさせるための先鋭な先端3aを有する。
【0013】
一方、第1のメッシュ電極4と第2のメッシュ電極5は、ステンレス等の金属を材料とするものであり、大気中の浮遊粒子状物質が流通するのに十分な一辺の長さが0.5mm程度の正方形のメッシュ開口を複数有する。
【0014】
第1のメッシュ電極4の位置は特に限定されない。但し、放電針3の先端3aと第1のメッシュ電極4との間においてコロナ放電が生じる程度の十分な大きさの電位勾配が生じるように、先端3aから2cm〜3cm程度の間隔D1をおいて第1のメッシュ電極4を設けるのが好ましい。
【0015】
また、第2のメッシュ電極5は、第1のメッシュ電極4と平行に配されると共に、第1のメッシュ電極5と比較して放電針3から離れて設けられる。その第2のメッシュ電極5と第1のメッシュ電極4との間隔D2は、例えば約1cm程度である。
【0016】
一方、QCMセンサ6は、水晶振動子6cとその両主面の各々に形成された第1の電極6a及び第2の電極6bとを有し、第1の電極6aが第2のメッシュ電極5に対向した状態で固定される。
【0017】
その第1の電極6aと第2のメッシュ電極5との間隔D3は、例えば約10cm程度とされる。
【0018】
また、この浮遊粒子状物質測定装置1は金属製の円筒状の筐体2を有しており、その筐体の中心軸Cに前述の放電針3、第1のメッシュ電極4、第2のメッシュ電極5、及びQCMセンサ6が設けられる。
【0019】
筐体2の各開口端2a、2bは開放されており、一方の開口端2aから筐体2内に大気Aが取り込まれ、他方の開口端2bから大気Aが排出される。そのような大気Aの流入を促すべく、他方の開口端2bにはファン7が設けられる。
【0020】
ファン7の回転軸は円筒状の筐体2の中心軸Cと一致しており、筐体2内の大気Aを開口端2bから外部に放出する方向にファン7は回転する。
【0021】
更に、この浮遊粒子状物質測定装置1は、電圧発生部11と、制御部12と、発振回路13と、周波数カウンタ14と、ファン制御回路15とを備える。
【0022】
このうち、電圧発生部11は第1〜第4の電圧V1〜V4を生成し、これらの電圧の各々を前述の放電針3、第1のメッシュ電極4、第2のメッシュ電極5、及びQCMセンサ6の第1の電極6aに印加する。
【0023】
また、発振回路13は、QCMセンサ6を基本波モードで共振させるための回路である。なお、QCMセンサ6に所定の大きさの第4の電圧V4を印加できるようにするため、QCMセンサ6と接続される発振回路13は電気的にフローティングの状態とするのが好ましい。
【0024】
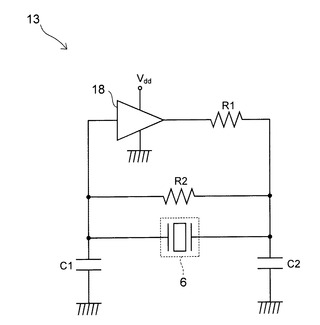
図2は、発振回路13の回路図である。
【0025】
図2に示すように、発振回路13は、インバータ18と、第1及び第2の抵抗R1、R2と、第1及び第2のキャパシタC1、C2とを備える。
【0026】
このような回路においては、インバータ18がQCMセンサ6と協働して並列共振回路を形成しており、第1及び第2のキャパシタC1、C2の容量値を適宜設定することで、QCMセンサ6を発振させることができる。
【0027】
なお、QCMセンサ6を流れる水晶電流の大きさは第1の抵抗R1によって調節される。そして、インバータ28には電源電圧Vddが印加されており、第2の抵抗R2がインバータ18の帰還抵抗として機能する。
【0028】
再び図1を参照する。
【0029】
周波数カウンタ14は、発振回路13を介してQCMセンサ6の共振周波数fを測定し、その測定結果を制御部12に出力する。
【0030】
制御部12は、パーソナルコンピュータ等の計算機であって、CPU等の測定部12aと、ハードディスク等の記憶部12bとを有する。
【0031】
また、ファン制御回路15は、制御部12の制御下でファン7を回転させたり、その回転を停止させたりする。
【0032】
次に、この浮遊粒子状物質測定装置1の動作原理について説明する。
【0033】
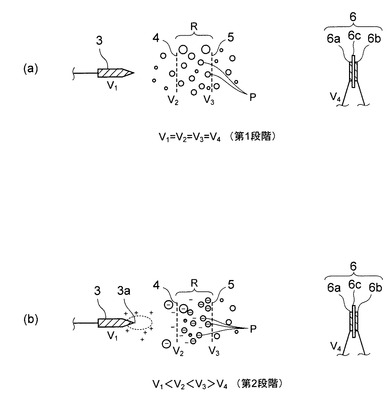
図3及び図4は、浮遊粒子状物質測定装置1の動作原理について説明するための模式図である。
【0034】
本実施形態では、以下のように第1〜第3段階を行うことにより、大気中に含まれる浮遊粒子状物質の粒径分布を測定する。
【0035】
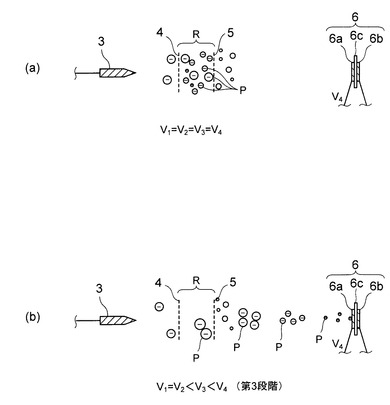
まず、第1段階では、図3(a)に示すように、第1〜第4の電圧V1〜V4を全て接地電位にした状態で、ファン7(図1参照)を回転させる。これにより大気中の浮遊粒子状物質Pが、第1のメッシュ電極4を流通して、第1のメッシュ電極4と第2のメッシュ電極5とで画定される一部領域Rに取り込まれる。
【0036】
その後、ファン7の回転を停止する。
【0037】
次の第2段階では、図3(b)に示すように、放電針3と第1のメッシュ電極4との間にパルス状の高電圧を印加して先端3aの近傍にパルス状のコロナ放電を発生させる。これにより、大気中において負イオンと正イオンとが生成される。
【0038】
このとき、第2の電圧V2と第1の電圧V1との電位差(V2−V1)はコロナ放電が発生し得る1000V程度とされる。また、第3の電圧V3と第2の電圧V2との電位差(V3−V2)を約200V、第3の電圧V3と第4の電圧V4との電位差(V4−V3)を約1000Vとすることにより、第1〜第4の電圧V1〜V4の各々の大小関係をV1<V2<V3>V4とする。
【0039】
電圧の大小関係をこのようにすると、コロナ放電によって帯電した大気イオンのうち、負に帯電したものが、第1〜第4の電圧V1〜V4のうち最も高い第3の電圧V3が印加されている第2のメッシュ電極5に引き付けられるようになる。その結果、前述の一部領域Rに負に帯電した大気イオンが収集されるので、当該一部領域Rにおいてその大気イオンと浮遊粒子状物質Pとが衝突し、電荷の付与によって浮遊粒子状物質Pを帯電させることができる。
【0040】
更に、一部領域Rの輪郭のうち放電針3に近い部分を第1のメッシュ電極4で画定したので、コロナ放電が一部領域Rに侵入するのを第1のメッシュ電極4で阻止できる。そのため、一部領域Rに取り込まれた浮遊粒子状物質Pがコロナ放電によって破壊されることがなく、筐体2内に取り込んだ当初と同一の粒径に浮遊粒子状物質Pの粒径を維持することができる。
【0041】
なお、上記のコロナ放電に代え、放電針3の周囲にグロー放電を生じさせてもよい。
【0042】
次いで、図4(a)に示すように、第1〜第4の電圧V1〜V4の全てを一旦接地電位にする。なお、本ステップは、次の第3段階に移る際にオーバーシュートやリンギングが発生するのを防止するために行われるものであり、場合によっては省略してもよい。
【0043】
その後に、図4(b)の第3段階に移り、第1〜第4の電圧V1〜V4の大小関係をV1=V2<V3<V4とする。各電圧は特に限定されないが、第1の電圧V1と第2の電圧V2は接地電位とする。また、第3の電圧V3と第2の電圧V2との電位差(V3−V2)を約200Vとし、第4の電圧V4と第3の電圧V3との電位差(V4−V3)を約1000Vとする。
【0044】
電圧の大小関係をこのようにすると、負に帯電した浮遊粒子状物質Pは、第1〜第4の電圧V1〜V4のうち最も高い第4の電圧V4が印加されているQCMセンサ6に静電力で引き付けられ、そのQCMセンサ6の表面に浮遊粒子状物質Pが付着する。
【0045】
ここで、浮遊粒子状物質Pには様々な粒径のものが存在するが、一部領域RからQCMセンサ6に到達するまでの時間は浮遊粒子状物質Pの粒径によって異なる。これは次のStokesの式から理解できる。
【0046】
浮遊粒子状物質Pが大気中を移動するときに大気から受ける抵抗力Fは、Stokesの式によって次の式(1)のように表される。
【0047】
【数1】

なお、式(1)において、ηは大気の粘度、rは浮遊粒子状物質Pの半径、vは粒子の速度である。
【0048】
また、電界中に置かれた浮遊粒子状物質Pに働く静電引力feは次の式(2)で表される。
【0049】
【数2】
なお、qは浮遊粒子状物質Pの電荷であり、Eは電界強度である。
【0050】
浮遊粒子状物質Pが第2のメッシュ電極5からQCMセンサ6に向かう途中においては、浮遊粒子状物質Pの速度が一定で抵抗力Fと静電引力feとが釣り合っているとみなせるので、次の式(3)が得られる。
【0051】
【数3】
これをrについて解くと、次の式(4)が得られる。
【0052】
【数4】
そして、浮遊粒子状物質Pの直径(粒径)Rは、式(4)の両辺を2倍して次の式(5)のように表される。
【0053】
【数5】
ここで、図1に示したように、第2のメッシュ電極5とQCMセンサ6との間隔はD3である。よって、第2のメッシュ電極5を出た浮遊粒子状物質PがQCMセンサ6に到達するまでの時間をtとすると、v=D3/t、E=(V4−V3)/D3となるから、式(5)から次の式(6)が得られる。
【0054】
【数6】
式(6)より、時間tから浮遊粒子状物質Pの粒径Rを求めることができる。
【0055】
一方、QCMセンサ6は、第1の電極6aに浮遊粒子状物質Pが付着すると、その共振周波数fが変化する。第1の電極6aに付着した浮遊粒子状物質Pの質量をMとすると、その共振周波数fの変化量Δfは、Saurbreyの式によって次の式(7)のように表されることが知られている。
【0056】
【数7】
但し、fqは水晶振動子6cの基本共振周波数、ρqは水晶振動子6cの密度、Nは水晶振動子6cのカットに依存する定数、Sは第1の電極6aの表面積である。
【0057】
前述のように浮遊粒子状物質PがQCMセンサ6に到達する時間tは浮遊粒子状物質Pの粒径Rによって異なり、粒径Rが小さい浮遊粒子状物質Pから順にQCMセンサ6に到達する。
【0058】
このような到達時間の時間差は、QCMセンサ6の共振周波数fの変化量Δfに反映される。
【0059】
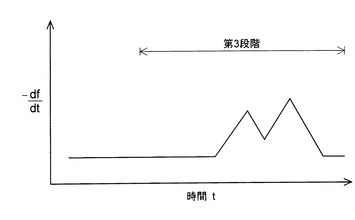
図5は、共振周波数の時間微分の一例を示すグラフである。
【0060】
このグラフの横軸は時間を示し、縦軸は共振周波数fの微分係数の符号を逆にした値を示す。
【0061】
図5に示すように、第3段階に入ってQCMセンサ6に浮遊粒子状物質Pが到達し始めるとグラフが増加し始める。これは、浮遊粒子状物質Pの付着によって第1の電極6aの質量が増加して、式(7)に従って共振周波数fが変化したためである。
【0062】
また、その第3段階においては、粒径Rが比較的小さい浮遊粒子状物質Pの集団に遅れて、粒径Rが比較的大きい浮遊粒子状物質Pの集団がQCMセンサ6に到達するようになるため、グラフには二つのピークが現れる。
【0063】
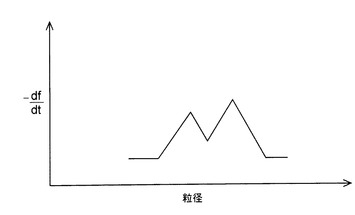
そして、式(6)に示したように、浮遊粒子状物質Pの粒径Rと時間tとは対応付けられるので、式(6)により図5のグラフの横軸の時間を粒径に変換すれば浮遊粒子状物質Pの粒径分布を得ることができる。
【0064】
図6は、このようにして得られた浮遊粒子状物質Pの粒径分布を模式的に示すグラフである。なお、このグラフの縦軸は図5と同様に−df/dtであり、これは式(7)よりQCMセンサ6に付着する浮遊粒子状物質Pの単位時間あたりの質量の変化量に相当し、大気中に含まれる浮遊粒子状物質Pの量の目安となる。
【0065】
浮遊粒子状物質Pの粒径分布は、浮遊粒子状物質Pの起源によって異なることが知られている。
【0066】
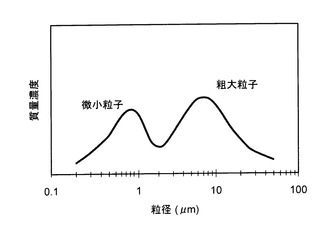
図7は、浮遊粒子状物質Pの実際の粒径分布の一例を示す図である。
【0067】
図7に示すように、実際の粒径分布においては、浮遊粒子状物質Pの起源に応じて複数のピークが現れる。例えば、粒径が1μm以上の粗大粒子は土壌や海塩等のように自然に由来するものが多く、粒径が1μm以下の微小粒子はディーゼルエンジン等の人工的なものに由来することが多いことが知られている。
【0068】
よって、本実施形態のように浮遊粒子状物質Pの粒径分布を測定すれば、その浮遊粒子状物質Pの起源を知ることができ、大気環境を知るための判断材料を得ることができる。
【0069】
また、図1に示したように、浮遊粒子状物質測定装置1は、QCMセンサ6を利用した極めてシンプルな構造であるため、安価に作製することができる。
【0070】
更に、浮遊粒子状物質Pの粒径分布を測定するにあたっても、QCMセンサ6の共振周波数fの時間変動を計測すればよく、簡便に粒径分布を測定することができる。
【0071】
なお、粒径分布のS/N比が小さい場合には、前述の図3(a)〜図4(b)の工程を1セットとし、これを複数セット行うことで粒径分布のS/N比を向上させればよい。
【0072】
更に、既知の粒径の微粒子を用いて予め実験を行うことにより式(6)の各係数を校正し、粒径分布の測定精度を向上させてもよい。
【0073】
次に、前述の動作原理を利用した浮遊粒子状物質測定方法について説明する。
【0074】
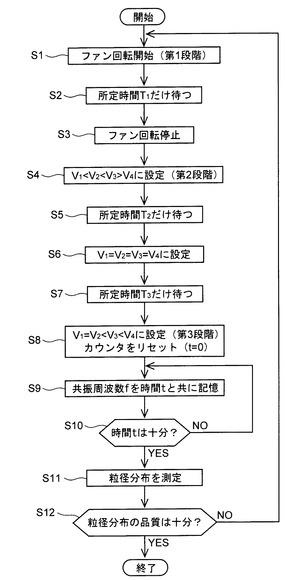
図8は、本実施形態に係る浮遊粒子状物質測定方法のフローチャートである。
【0075】
まず、最初のステップS1では、制御部12(図1参照)の制御下でファン7の回転を開始する。
【0076】
なお、この段階では、第1〜第4の電圧V1〜V4は全て接地電位とする。
【0077】
そして、ステップS2に移り、制御部12の制御下で、ファン7の回転を開始してから所定時間T1だけ待つ。所定時間T1は、筐体2内の大気が外気と交換するのに必要な時間であって、例えば5秒〜10秒程度である。
【0078】
所定時間T1が経過したら、ステップS3に移って制御部12の制御下でファン7の回転を停止する。
【0079】
ここまでのステップにより、図3(a)の第1段階が終了する。
【0080】
次に、ステップS4に移り、制御部12の制御下において第1〜第4の電圧V1〜V4の大小関係をV1<V2<V3>V4とする。これにより、図3(b)に示した第2段階が行われ、放電針3の先端3aにおいてパルス状のコロナ放電を発生させる。なお、第2段階における第1〜第4の電圧V1〜V4の電圧値は図3(b)で説明したのと同じなので、ここでは省略する。
【0081】
続いて、ステップS5に移り、制御部12の制御下で、第2段階を開始してから所定時間T2だけ待つ。所定時間T2は、コロナ放電によって生成された負イオンが一部領域R(図3(b)参照)に移動し、当該領域R内における浮遊粒子状物質Pと衝突するのに要する時間であって、例えば1秒〜2秒程度である。
【0082】
そして、所定時間T2が経過したらステップS6に移る。本ステップでは、制御部12の制御下において第1〜第4の電圧V1〜V4の全てを一旦接地電位とする。
【0083】
その後、ステップS7に移り、第1〜第4の電圧V1〜V4を接地電位としてから所定時間T3だけ待つ。所定時間T3は、第1〜第4の電圧V1〜V4を第3段階で使用する値に切り替える際のオーバーシュートやリンギングを抑制するためのものであって、10ミリ秒〜100ミリ秒程度のごく短い時間でよい。
【0084】
そして、所定時間T3が経過したらステップS8に移り、制御部12の制御下において第1〜第4の電圧V1〜V4の大小関係をV1=V2<V3<V4とし、図4(b)に示した第3段階に入る。なお、第3段階における第1〜第4の電圧V1〜V4の電圧値は図4(b)で説明したのと同じなので、ここでは省略する。
【0085】
また、これと共に、制御部12が内蔵する不図示の時間カウンタを制御部12自身がリセットし、粒径分布の測定開始の基準となる経過時間tを0とする。
【0086】
続いて、ステップS9に移り、周波数カウンタ14から出力されるQCMセンサ6の発振周波数fの測定値を制御部12が所定の時間間隔で取り込み、経過時間tと共にその共振周波数fを記憶部12bに記憶する。
【0087】
なお、発振周波数fを取り込む上記の時間間隔は、例えば100ミリ秒程度である。
【0088】
そして、ステップS10に移り、現在の経過時間tが、ユーザが測定を希望する浮遊粒子状物質Pの最大粒径を測定するのに十分経過しているか否かを制御部12が判断する。その経過時間tは、式(6)に最大粒径Rを代入し、式(6)をtについて解くことで得られる。
【0089】
ここで、十分でない(NO)と判断した場合には再びステップS9からやり直す。
【0090】
一方、十分である(YES)と判断した場合には、ステップS11に移る。
【0091】
ステップS11では、測定部12aが、ステップS9で取得した共振周波数fを各経過時間tについて微分して共振周波数fの変化をモニタすると共に、式(6)に従って時間tを浮遊粒子状物質Pの粒径Rに対応付けることで、図6に示したような粒径分布を測定する。
【0092】
次に、ステップS12に移り、ステップS11で作成された粒径分布が十分な品質であるか否かをユーザが判断する。この判断基準は特に限定されないが、本実施形態では、ユーザの経験により、粒径分布が現実を反映する程度に十分に滑らかかどうかによりこの判断を行う。
【0093】
ここで、粒径分布の品質は十分でない(NO)と判断された場合には、再びステップS1に戻り、粒径分布を再作成する。
【0094】
一方、粒径分布の品質は十分である(YES)と判断された場合には、浮遊粒子状物質測定方法の基本ステップを終了する。
【0095】
上記した本実施形態によれば、式(6)に基づいて時間tから浮遊粒子状物質Pの粒径Rを求めることで当該粒径Rの分布を簡便に知ることができるので、身近な大気環境を測定することにより環境改善に資することができるようになる。
【0096】
(第2実施形態)
図9は、本実施形態に係る浮遊粒子状物質測定装置の構成図である。
【0097】
なお、図9において、第1実施形態で説明したのと同じ要素には第1実施形態におけるのと同じ符号を付し、以下ではその説明を省略する。
【0098】
図9に示すように、本実施形態に係る浮遊粒子状物質測定装置30は、筐体2の側面に導入ダクト31と排気ダクト32を設ける。そして、その排気ダクト32内にファン7を設け、ファン7の回転軸の延長線7xを、第1のメッシュ電極4と第2のメッシュ電極5との間において円筒状の筐体2の中心軸Cと直交させる。
【0099】
また、筐体2の開口端2a、2bは封止板35によって閉じられている。
【0100】
なお、この浮遊粒子状物質測定装置30を用いた浮遊粒子状物質測定方法は、第1実施形態と同じなので、以下ではその説明を省略する。
【0101】
この浮遊粒子状物質測定装置30では、制御部12の制御下でファン7を回転させることにより、浮遊粒子状物質Pを含んだ大気Aが導入ダクト31から筐体2内に導入される。
【0102】
その浮遊粒子状物質Pは、ファン7の回転によって生じた気流に乗って延長線7xに沿って進むため、延長線7xに直交する軸Cに沿って放電針3に近づく危険が少なくなり、実質的には第1のメッシュ電極4と第2のメッシュ電極5との間に留まる。
【0103】
よって、放電針3の近傍に発生するコロナ放電によって浮遊粒子状物質Pが破壊される危険性を低減し、外気に含まれていたときと同一の粒径を保ったまま筐体2内に浮遊粒子状物質Pを導入し、その粒径分布を精度良く測定することが可能となる。
【0104】
更に、このように放電針3から浮遊粒子状物質Pが離れることにより、放電針3の表面に浮遊粒子状物質Pが付着して当該表面が劣化するのを防止することもできる。
【0105】
以上、本実施形態について詳細に説明したが、本実施形態は上記に限定されない。例えば、上記では図3〜図4のように浮遊粒子状物質Pを負に帯電させたが、第1〜第4の電圧V1〜V4の不等号の向きを上記とは逆にして浮遊粒子状物質Pを正に帯電させてもよい。浮遊粒子状物質Pを正と負のどちらに帯電させるかは、浮遊粒子状物質Pがどちらの極性に帯電し易いかに応じて適宜判断すればよい。
【0106】
以上説明した各実施形態に関し、更に以下の付記を開示する。
【0107】
(付記1) 大気中で放電を生じさせる放電針と、
前記放電針の先端から間隔をおいて設けられ、前記大気に含まれる浮遊粒子状物質が流通する第1のメッシュ電極と、
前記第1のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記浮遊粒子状物質が流通する第2のメッシュ電極と、
前記第2のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記第2のメッシュ電極を流通した前記浮遊粒子状物質が付着するQCMセンサと、
前記放電針と前記第1のメッシュ電極との間、前記第1のメッシュ電極と前記第2のメッシュ電極との間、及び前記第2のメッシュ電極と前記QCMセンサとの間の各々に電位差を与える電圧発生部と、
前記浮遊粒子状物質の付着に伴う前記QCMセンサの共振周波数の変化に基づいて、前記浮遊粒子状物質の粒径分布を測定する測定部と、
を有することを特徴とする浮遊粒子状物質測定装置。
【0108】
(付記2) 前記電圧発生部は、
前記放電針に第1の電圧を与え、前記第1のメッシュ電極に第2の電圧を与え、前記第2のメッシュ電極に第3の電圧を与え、前記QCMセンサに第4の電圧を与えると共に、
前記第1の電圧、前記第2の電圧、前記第3の電圧、及び前記第4の電圧の全てを同一にする第1のステップと、
前記第2の電圧を前記第1の電圧よりも高くし、前記第3の電圧を前記第2の電圧よりも高くし、かつ、前記第4の電圧を前記第3の電圧よりも低くする第2のステップと、
前記第2の電圧を前記第1の電圧と同一にし、前記第3の電圧を前記第2の電圧よりも高くし、かつ、前記第4の電圧を前記第3の電圧よりも高くする第3のステップとをこの順に行い、
前記測定部は、前記第3のステップにおける前記共振周波数の変化に基づいて、前記浮遊粒子状物質の前記粒径分布を測定することを特徴とする付記1に記載の浮遊粒子状物質測定装置。
【0109】
(付記3) 前記測定部は、前記粒径分布の前記測定を開始した時刻からの経過時間に基づいて、前記浮遊粒子状物質の粒径分布を測定することを特徴とする付記1又は付記2に記載の浮遊粒子状物質測定装置。
【0110】
(付記4) 前記測定部は、前記共振周波数を前記経過時間で微分して得られたグラフを前記粒径分布とすることを特徴とする付記3に記載の浮遊粒子状物質測定装置。
【0111】
(付記5) 前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサを収容する筐体と、
前記筐体の内部に大気を取り込むファンとを更に有することを特徴とする付記1乃至付記4のいずれかに記載の浮遊粒子状物質測定装置。
【0112】
(付記6) 前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサが同一の軸上に設けられ、
前記ファンの回転軸の延長線が、前記第1のメッシュ電極と前記第2のメッシュ電極との間において前記軸と直交することを特徴とする付記5に記載の浮遊粒子状物質測定装置。
【0113】
(付記7) 前記QCMセンサは、水晶振動子と、該水晶振動子の両主面の各々に形成された第1の電極及び第2の電極とを備え、
前記第1の電極が前記第2のメッシュ電極と対向して設けられ、前記第1の電極と前記第2のメッシュ電極との間に前記電位差が与えられることを特徴とする付記1乃至付記6のいずれかに記載の浮遊粒子状物質測定装置。
【0114】
(付記8) 前記放電針と前記第1のメッシュ電極との前記電位差は、前記放電針の前記先端において放電が発生し得る値であることを特徴とする付記1乃至付記7のいずれかに記載の浮遊粒子状物質測定装置。
【0115】
(付記9) 大気中の一部領域において、該大気に含まれる浮遊粒子状物質を帯電させるステップと、
前記一部領域と、該一部領域から間隔をおいて設けられたQCMセンサとの間に電位差を付与することにより、帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップと、
前記電位差を付与してからの経過時間を前記浮遊粒子状物質の粒径に対応付けると共に、前記経過時間に伴う前記QCMセンサの共振周波数の変化をモニタすることにより、前記浮遊粒子状物質の粒径分布を測定するステップと、
を有すること浮遊粒子状物質測定方法。
【0116】
(付記10) 前記浮遊粒子状物質を帯電させるステップは、互いに対向する第1のメッシュ電極と第2のメッシュ電極によって前記一部領域を画定すると共に、前記第1のメッシュ電極から間隔をおいて放電針を設けて、該放電針と前記第1のメッシュ電極との間で放電を発生させることにより行われ、
帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップは、前記第2のメッシュ電極と前記QCMセンサとの間に前記電位差を付与することにより行われることを特徴とする付記7に記載の浮遊粒子状物質測定方法。
【符号の説明】
【0117】
1、30…浮遊粒子状物質測定装置、2…筐体、2a、2b…開口端、3…放電針、3a…先端、4…第1のメッシュ電極、5…第2のメッシュ電極、6…QCMセンサ、6a…第1の電極、6b…第2の電極、6c…水晶振動子、7…ファン、11…電圧発生部、12…制御部、13…発振回路、14…周波数カウンタ、15…ファン制御回路、18…インバータ、31…導入ダクト、32…排気ダクト。
【技術分野】
【0001】
本発明は、浮遊粒子状物質測定装置及び浮遊粒子状物質測定方法に関する。
【背景技術】
【0002】
大気中には人間の健康に影響を及ぼす様々な浮遊粒子状物質(SPM: Suspended Particulate Matter)が存在する。
【0003】
浮遊粒子状物質には、自然界に由来するものと、工場やディーゼルエンジンの排ガスに含まれる人工的なものとがあるが、前者と後者とでは粒径分布が異なる。よって、大気中の浮遊粒子状物質をモニタリングしてその粒径分布を測定すれば、浮遊粒子状物質が自然界に由来するものなのか或いは人工的なものなのかを判別でき、大気環境を知るための判断材料を得ることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−257873号公報
【特許文献2】国際公開第2009/057256号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0005】
浮遊粒子状物質測定装置及び浮遊粒子状物質測定方法において、浮遊粒子状物質の粒径分布を簡便に測定できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
以下の開示によれば、大気中で放電を生じさせる放電針と、前記放電針の先端から間隔をおいて設けられ、前記大気に含まれる浮遊粒子状物質が流通する第1のメッシュ電極と、前記第1のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記浮遊粒子状物質が流通する第2のメッシュ電極と、前記第2のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記第2のメッシュ電極を流通した前記浮遊粒子状物質が付着するQCMセンサと、前記放電針と前記第1のメッシュ電極との間、前記第1のメッシュ電極と前記第2のメッシュ電極との間、及び前記第2のメッシュ電極と前記QCMセンサとの間の各々に電位差を与える電圧発生部と、前記浮遊粒子状物質の付着に伴う前記QCMセンサの共振周波数の変化に基づいて、前記浮遊粒子状物質の粒径分布を測定する測定部とを有する浮遊粒子状物質測定装置が提供される。
【0007】
また、その開示の他の観点によれば、大気中の一部領域において、該大気に含まれる浮遊粒子状物質を帯電させるステップと、前記一部領域と、該一部領域から間隔をおいて設けられたQCMセンサとの間に電位差を付与することにより、帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップと、前記電位差を付与してからの経過時間を前記浮遊粒子状物質の粒径に対応付けると共に、前記経過時間に伴う前記QCMセンサの共振周波数の変化をモニタすることにより、前記浮遊粒子状物質の粒径分布を測定するステップとを有する浮遊粒子状物質測定方法が提供される。
【発明の効果】
【0008】
以下の開示によれば、浮遊粒子状物質がその粒径によってQCMセンサに到達する時間が異なることを利用することで、電位差を付与してからの経過時間に基づいてその粒径の分布を簡単に測定することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、第1実施形態に係る浮遊粒子状物質測定装置の構成図である。
【図2】図2は、第1実施形態に係る発振回路の回路図である。
【図3】図3(a)、(b)は、第1実施形態に係る浮遊粒子状物質測定装置の動作原理について説明するための模式図(その1)である。
【図4】図4(a)、(b)は、第1実施形態に係る浮遊粒子状物質測定装置の動作原理について説明するための模式図(その2)である。
【図5】図5は、第1実施形態に係る共振周波数の時間微分の一例を示すグラフである。
【図6】図6は、第1実施形態において得られた浮遊粒子状物質の粒径分布を模式的に示すグラフである。
【図7】図7は、浮遊粒子状物質の実際の粒径分布の一例を示す図である。
【図8】図8は、第1実施形態に係る浮遊粒子状物質測定方法のフローチャートである。
【図9】図9は、第2実施形態に係る浮遊粒子状物質測定装置の構成図である。
【発明を実施するための形態】
【0010】
(第1実施形態)
図1は、本実施形態に係る浮遊粒子状物質測定装置の構成図である。
【0011】
この浮遊粒子状物質測定装置1は、放電針3と、第1のメッシュ電極4と、第2のメッシュ電極5と、QCM(Quartz Crystal Microbalance)センサ6とを有する。
【0012】
このうち、放電針3は、タングステン等の金属を材料とするものであって、コロナ放電を生じさせるための先鋭な先端3aを有する。
【0013】
一方、第1のメッシュ電極4と第2のメッシュ電極5は、ステンレス等の金属を材料とするものであり、大気中の浮遊粒子状物質が流通するのに十分な一辺の長さが0.5mm程度の正方形のメッシュ開口を複数有する。
【0014】
第1のメッシュ電極4の位置は特に限定されない。但し、放電針3の先端3aと第1のメッシュ電極4との間においてコロナ放電が生じる程度の十分な大きさの電位勾配が生じるように、先端3aから2cm〜3cm程度の間隔D1をおいて第1のメッシュ電極4を設けるのが好ましい。
【0015】
また、第2のメッシュ電極5は、第1のメッシュ電極4と平行に配されると共に、第1のメッシュ電極5と比較して放電針3から離れて設けられる。その第2のメッシュ電極5と第1のメッシュ電極4との間隔D2は、例えば約1cm程度である。
【0016】
一方、QCMセンサ6は、水晶振動子6cとその両主面の各々に形成された第1の電極6a及び第2の電極6bとを有し、第1の電極6aが第2のメッシュ電極5に対向した状態で固定される。
【0017】
その第1の電極6aと第2のメッシュ電極5との間隔D3は、例えば約10cm程度とされる。
【0018】
また、この浮遊粒子状物質測定装置1は金属製の円筒状の筐体2を有しており、その筐体の中心軸Cに前述の放電針3、第1のメッシュ電極4、第2のメッシュ電極5、及びQCMセンサ6が設けられる。
【0019】
筐体2の各開口端2a、2bは開放されており、一方の開口端2aから筐体2内に大気Aが取り込まれ、他方の開口端2bから大気Aが排出される。そのような大気Aの流入を促すべく、他方の開口端2bにはファン7が設けられる。
【0020】
ファン7の回転軸は円筒状の筐体2の中心軸Cと一致しており、筐体2内の大気Aを開口端2bから外部に放出する方向にファン7は回転する。
【0021】
更に、この浮遊粒子状物質測定装置1は、電圧発生部11と、制御部12と、発振回路13と、周波数カウンタ14と、ファン制御回路15とを備える。
【0022】
このうち、電圧発生部11は第1〜第4の電圧V1〜V4を生成し、これらの電圧の各々を前述の放電針3、第1のメッシュ電極4、第2のメッシュ電極5、及びQCMセンサ6の第1の電極6aに印加する。
【0023】
また、発振回路13は、QCMセンサ6を基本波モードで共振させるための回路である。なお、QCMセンサ6に所定の大きさの第4の電圧V4を印加できるようにするため、QCMセンサ6と接続される発振回路13は電気的にフローティングの状態とするのが好ましい。
【0024】
図2は、発振回路13の回路図である。
【0025】
図2に示すように、発振回路13は、インバータ18と、第1及び第2の抵抗R1、R2と、第1及び第2のキャパシタC1、C2とを備える。
【0026】
このような回路においては、インバータ18がQCMセンサ6と協働して並列共振回路を形成しており、第1及び第2のキャパシタC1、C2の容量値を適宜設定することで、QCMセンサ6を発振させることができる。
【0027】
なお、QCMセンサ6を流れる水晶電流の大きさは第1の抵抗R1によって調節される。そして、インバータ28には電源電圧Vddが印加されており、第2の抵抗R2がインバータ18の帰還抵抗として機能する。
【0028】
再び図1を参照する。
【0029】
周波数カウンタ14は、発振回路13を介してQCMセンサ6の共振周波数fを測定し、その測定結果を制御部12に出力する。
【0030】
制御部12は、パーソナルコンピュータ等の計算機であって、CPU等の測定部12aと、ハードディスク等の記憶部12bとを有する。
【0031】
また、ファン制御回路15は、制御部12の制御下でファン7を回転させたり、その回転を停止させたりする。
【0032】
次に、この浮遊粒子状物質測定装置1の動作原理について説明する。
【0033】
図3及び図4は、浮遊粒子状物質測定装置1の動作原理について説明するための模式図である。
【0034】
本実施形態では、以下のように第1〜第3段階を行うことにより、大気中に含まれる浮遊粒子状物質の粒径分布を測定する。
【0035】
まず、第1段階では、図3(a)に示すように、第1〜第4の電圧V1〜V4を全て接地電位にした状態で、ファン7(図1参照)を回転させる。これにより大気中の浮遊粒子状物質Pが、第1のメッシュ電極4を流通して、第1のメッシュ電極4と第2のメッシュ電極5とで画定される一部領域Rに取り込まれる。
【0036】
その後、ファン7の回転を停止する。
【0037】
次の第2段階では、図3(b)に示すように、放電針3と第1のメッシュ電極4との間にパルス状の高電圧を印加して先端3aの近傍にパルス状のコロナ放電を発生させる。これにより、大気中において負イオンと正イオンとが生成される。
【0038】
このとき、第2の電圧V2と第1の電圧V1との電位差(V2−V1)はコロナ放電が発生し得る1000V程度とされる。また、第3の電圧V3と第2の電圧V2との電位差(V3−V2)を約200V、第3の電圧V3と第4の電圧V4との電位差(V4−V3)を約1000Vとすることにより、第1〜第4の電圧V1〜V4の各々の大小関係をV1<V2<V3>V4とする。
【0039】
電圧の大小関係をこのようにすると、コロナ放電によって帯電した大気イオンのうち、負に帯電したものが、第1〜第4の電圧V1〜V4のうち最も高い第3の電圧V3が印加されている第2のメッシュ電極5に引き付けられるようになる。その結果、前述の一部領域Rに負に帯電した大気イオンが収集されるので、当該一部領域Rにおいてその大気イオンと浮遊粒子状物質Pとが衝突し、電荷の付与によって浮遊粒子状物質Pを帯電させることができる。
【0040】
更に、一部領域Rの輪郭のうち放電針3に近い部分を第1のメッシュ電極4で画定したので、コロナ放電が一部領域Rに侵入するのを第1のメッシュ電極4で阻止できる。そのため、一部領域Rに取り込まれた浮遊粒子状物質Pがコロナ放電によって破壊されることがなく、筐体2内に取り込んだ当初と同一の粒径に浮遊粒子状物質Pの粒径を維持することができる。
【0041】
なお、上記のコロナ放電に代え、放電針3の周囲にグロー放電を生じさせてもよい。
【0042】
次いで、図4(a)に示すように、第1〜第4の電圧V1〜V4の全てを一旦接地電位にする。なお、本ステップは、次の第3段階に移る際にオーバーシュートやリンギングが発生するのを防止するために行われるものであり、場合によっては省略してもよい。
【0043】
その後に、図4(b)の第3段階に移り、第1〜第4の電圧V1〜V4の大小関係をV1=V2<V3<V4とする。各電圧は特に限定されないが、第1の電圧V1と第2の電圧V2は接地電位とする。また、第3の電圧V3と第2の電圧V2との電位差(V3−V2)を約200Vとし、第4の電圧V4と第3の電圧V3との電位差(V4−V3)を約1000Vとする。
【0044】
電圧の大小関係をこのようにすると、負に帯電した浮遊粒子状物質Pは、第1〜第4の電圧V1〜V4のうち最も高い第4の電圧V4が印加されているQCMセンサ6に静電力で引き付けられ、そのQCMセンサ6の表面に浮遊粒子状物質Pが付着する。
【0045】
ここで、浮遊粒子状物質Pには様々な粒径のものが存在するが、一部領域RからQCMセンサ6に到達するまでの時間は浮遊粒子状物質Pの粒径によって異なる。これは次のStokesの式から理解できる。
【0046】
浮遊粒子状物質Pが大気中を移動するときに大気から受ける抵抗力Fは、Stokesの式によって次の式(1)のように表される。
【0047】
【数1】
なお、式(1)において、ηは大気の粘度、rは浮遊粒子状物質Pの半径、vは粒子の速度である。
【0048】
また、電界中に置かれた浮遊粒子状物質Pに働く静電引力feは次の式(2)で表される。
【0049】
【数2】
なお、qは浮遊粒子状物質Pの電荷であり、Eは電界強度である。
【0050】
浮遊粒子状物質Pが第2のメッシュ電極5からQCMセンサ6に向かう途中においては、浮遊粒子状物質Pの速度が一定で抵抗力Fと静電引力feとが釣り合っているとみなせるので、次の式(3)が得られる。
【0051】
【数3】
これをrについて解くと、次の式(4)が得られる。
【0052】
【数4】
そして、浮遊粒子状物質Pの直径(粒径)Rは、式(4)の両辺を2倍して次の式(5)のように表される。
【0053】
【数5】
ここで、図1に示したように、第2のメッシュ電極5とQCMセンサ6との間隔はD3である。よって、第2のメッシュ電極5を出た浮遊粒子状物質PがQCMセンサ6に到達するまでの時間をtとすると、v=D3/t、E=(V4−V3)/D3となるから、式(5)から次の式(6)が得られる。
【0054】
【数6】
式(6)より、時間tから浮遊粒子状物質Pの粒径Rを求めることができる。
【0055】
一方、QCMセンサ6は、第1の電極6aに浮遊粒子状物質Pが付着すると、その共振周波数fが変化する。第1の電極6aに付着した浮遊粒子状物質Pの質量をMとすると、その共振周波数fの変化量Δfは、Saurbreyの式によって次の式(7)のように表されることが知られている。
【0056】
【数7】
但し、fqは水晶振動子6cの基本共振周波数、ρqは水晶振動子6cの密度、Nは水晶振動子6cのカットに依存する定数、Sは第1の電極6aの表面積である。
【0057】
前述のように浮遊粒子状物質PがQCMセンサ6に到達する時間tは浮遊粒子状物質Pの粒径Rによって異なり、粒径Rが小さい浮遊粒子状物質Pから順にQCMセンサ6に到達する。
【0058】
このような到達時間の時間差は、QCMセンサ6の共振周波数fの変化量Δfに反映される。
【0059】
図5は、共振周波数の時間微分の一例を示すグラフである。
【0060】
このグラフの横軸は時間を示し、縦軸は共振周波数fの微分係数の符号を逆にした値を示す。
【0061】
図5に示すように、第3段階に入ってQCMセンサ6に浮遊粒子状物質Pが到達し始めるとグラフが増加し始める。これは、浮遊粒子状物質Pの付着によって第1の電極6aの質量が増加して、式(7)に従って共振周波数fが変化したためである。
【0062】
また、その第3段階においては、粒径Rが比較的小さい浮遊粒子状物質Pの集団に遅れて、粒径Rが比較的大きい浮遊粒子状物質Pの集団がQCMセンサ6に到達するようになるため、グラフには二つのピークが現れる。
【0063】
そして、式(6)に示したように、浮遊粒子状物質Pの粒径Rと時間tとは対応付けられるので、式(6)により図5のグラフの横軸の時間を粒径に変換すれば浮遊粒子状物質Pの粒径分布を得ることができる。
【0064】
図6は、このようにして得られた浮遊粒子状物質Pの粒径分布を模式的に示すグラフである。なお、このグラフの縦軸は図5と同様に−df/dtであり、これは式(7)よりQCMセンサ6に付着する浮遊粒子状物質Pの単位時間あたりの質量の変化量に相当し、大気中に含まれる浮遊粒子状物質Pの量の目安となる。
【0065】
浮遊粒子状物質Pの粒径分布は、浮遊粒子状物質Pの起源によって異なることが知られている。
【0066】
図7は、浮遊粒子状物質Pの実際の粒径分布の一例を示す図である。
【0067】
図7に示すように、実際の粒径分布においては、浮遊粒子状物質Pの起源に応じて複数のピークが現れる。例えば、粒径が1μm以上の粗大粒子は土壌や海塩等のように自然に由来するものが多く、粒径が1μm以下の微小粒子はディーゼルエンジン等の人工的なものに由来することが多いことが知られている。
【0068】
よって、本実施形態のように浮遊粒子状物質Pの粒径分布を測定すれば、その浮遊粒子状物質Pの起源を知ることができ、大気環境を知るための判断材料を得ることができる。
【0069】
また、図1に示したように、浮遊粒子状物質測定装置1は、QCMセンサ6を利用した極めてシンプルな構造であるため、安価に作製することができる。
【0070】
更に、浮遊粒子状物質Pの粒径分布を測定するにあたっても、QCMセンサ6の共振周波数fの時間変動を計測すればよく、簡便に粒径分布を測定することができる。
【0071】
なお、粒径分布のS/N比が小さい場合には、前述の図3(a)〜図4(b)の工程を1セットとし、これを複数セット行うことで粒径分布のS/N比を向上させればよい。
【0072】
更に、既知の粒径の微粒子を用いて予め実験を行うことにより式(6)の各係数を校正し、粒径分布の測定精度を向上させてもよい。
【0073】
次に、前述の動作原理を利用した浮遊粒子状物質測定方法について説明する。
【0074】
図8は、本実施形態に係る浮遊粒子状物質測定方法のフローチャートである。
【0075】
まず、最初のステップS1では、制御部12(図1参照)の制御下でファン7の回転を開始する。
【0076】
なお、この段階では、第1〜第4の電圧V1〜V4は全て接地電位とする。
【0077】
そして、ステップS2に移り、制御部12の制御下で、ファン7の回転を開始してから所定時間T1だけ待つ。所定時間T1は、筐体2内の大気が外気と交換するのに必要な時間であって、例えば5秒〜10秒程度である。
【0078】
所定時間T1が経過したら、ステップS3に移って制御部12の制御下でファン7の回転を停止する。
【0079】
ここまでのステップにより、図3(a)の第1段階が終了する。
【0080】
次に、ステップS4に移り、制御部12の制御下において第1〜第4の電圧V1〜V4の大小関係をV1<V2<V3>V4とする。これにより、図3(b)に示した第2段階が行われ、放電針3の先端3aにおいてパルス状のコロナ放電を発生させる。なお、第2段階における第1〜第4の電圧V1〜V4の電圧値は図3(b)で説明したのと同じなので、ここでは省略する。
【0081】
続いて、ステップS5に移り、制御部12の制御下で、第2段階を開始してから所定時間T2だけ待つ。所定時間T2は、コロナ放電によって生成された負イオンが一部領域R(図3(b)参照)に移動し、当該領域R内における浮遊粒子状物質Pと衝突するのに要する時間であって、例えば1秒〜2秒程度である。
【0082】
そして、所定時間T2が経過したらステップS6に移る。本ステップでは、制御部12の制御下において第1〜第4の電圧V1〜V4の全てを一旦接地電位とする。
【0083】
その後、ステップS7に移り、第1〜第4の電圧V1〜V4を接地電位としてから所定時間T3だけ待つ。所定時間T3は、第1〜第4の電圧V1〜V4を第3段階で使用する値に切り替える際のオーバーシュートやリンギングを抑制するためのものであって、10ミリ秒〜100ミリ秒程度のごく短い時間でよい。
【0084】
そして、所定時間T3が経過したらステップS8に移り、制御部12の制御下において第1〜第4の電圧V1〜V4の大小関係をV1=V2<V3<V4とし、図4(b)に示した第3段階に入る。なお、第3段階における第1〜第4の電圧V1〜V4の電圧値は図4(b)で説明したのと同じなので、ここでは省略する。
【0085】
また、これと共に、制御部12が内蔵する不図示の時間カウンタを制御部12自身がリセットし、粒径分布の測定開始の基準となる経過時間tを0とする。
【0086】
続いて、ステップS9に移り、周波数カウンタ14から出力されるQCMセンサ6の発振周波数fの測定値を制御部12が所定の時間間隔で取り込み、経過時間tと共にその共振周波数fを記憶部12bに記憶する。
【0087】
なお、発振周波数fを取り込む上記の時間間隔は、例えば100ミリ秒程度である。
【0088】
そして、ステップS10に移り、現在の経過時間tが、ユーザが測定を希望する浮遊粒子状物質Pの最大粒径を測定するのに十分経過しているか否かを制御部12が判断する。その経過時間tは、式(6)に最大粒径Rを代入し、式(6)をtについて解くことで得られる。
【0089】
ここで、十分でない(NO)と判断した場合には再びステップS9からやり直す。
【0090】
一方、十分である(YES)と判断した場合には、ステップS11に移る。
【0091】
ステップS11では、測定部12aが、ステップS9で取得した共振周波数fを各経過時間tについて微分して共振周波数fの変化をモニタすると共に、式(6)に従って時間tを浮遊粒子状物質Pの粒径Rに対応付けることで、図6に示したような粒径分布を測定する。
【0092】
次に、ステップS12に移り、ステップS11で作成された粒径分布が十分な品質であるか否かをユーザが判断する。この判断基準は特に限定されないが、本実施形態では、ユーザの経験により、粒径分布が現実を反映する程度に十分に滑らかかどうかによりこの判断を行う。
【0093】
ここで、粒径分布の品質は十分でない(NO)と判断された場合には、再びステップS1に戻り、粒径分布を再作成する。
【0094】
一方、粒径分布の品質は十分である(YES)と判断された場合には、浮遊粒子状物質測定方法の基本ステップを終了する。
【0095】
上記した本実施形態によれば、式(6)に基づいて時間tから浮遊粒子状物質Pの粒径Rを求めることで当該粒径Rの分布を簡便に知ることができるので、身近な大気環境を測定することにより環境改善に資することができるようになる。
【0096】
(第2実施形態)
図9は、本実施形態に係る浮遊粒子状物質測定装置の構成図である。
【0097】
なお、図9において、第1実施形態で説明したのと同じ要素には第1実施形態におけるのと同じ符号を付し、以下ではその説明を省略する。
【0098】
図9に示すように、本実施形態に係る浮遊粒子状物質測定装置30は、筐体2の側面に導入ダクト31と排気ダクト32を設ける。そして、その排気ダクト32内にファン7を設け、ファン7の回転軸の延長線7xを、第1のメッシュ電極4と第2のメッシュ電極5との間において円筒状の筐体2の中心軸Cと直交させる。
【0099】
また、筐体2の開口端2a、2bは封止板35によって閉じられている。
【0100】
なお、この浮遊粒子状物質測定装置30を用いた浮遊粒子状物質測定方法は、第1実施形態と同じなので、以下ではその説明を省略する。
【0101】
この浮遊粒子状物質測定装置30では、制御部12の制御下でファン7を回転させることにより、浮遊粒子状物質Pを含んだ大気Aが導入ダクト31から筐体2内に導入される。
【0102】
その浮遊粒子状物質Pは、ファン7の回転によって生じた気流に乗って延長線7xに沿って進むため、延長線7xに直交する軸Cに沿って放電針3に近づく危険が少なくなり、実質的には第1のメッシュ電極4と第2のメッシュ電極5との間に留まる。
【0103】
よって、放電針3の近傍に発生するコロナ放電によって浮遊粒子状物質Pが破壊される危険性を低減し、外気に含まれていたときと同一の粒径を保ったまま筐体2内に浮遊粒子状物質Pを導入し、その粒径分布を精度良く測定することが可能となる。
【0104】
更に、このように放電針3から浮遊粒子状物質Pが離れることにより、放電針3の表面に浮遊粒子状物質Pが付着して当該表面が劣化するのを防止することもできる。
【0105】
以上、本実施形態について詳細に説明したが、本実施形態は上記に限定されない。例えば、上記では図3〜図4のように浮遊粒子状物質Pを負に帯電させたが、第1〜第4の電圧V1〜V4の不等号の向きを上記とは逆にして浮遊粒子状物質Pを正に帯電させてもよい。浮遊粒子状物質Pを正と負のどちらに帯電させるかは、浮遊粒子状物質Pがどちらの極性に帯電し易いかに応じて適宜判断すればよい。
【0106】
以上説明した各実施形態に関し、更に以下の付記を開示する。
【0107】
(付記1) 大気中で放電を生じさせる放電針と、
前記放電針の先端から間隔をおいて設けられ、前記大気に含まれる浮遊粒子状物質が流通する第1のメッシュ電極と、
前記第1のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記浮遊粒子状物質が流通する第2のメッシュ電極と、
前記第2のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記第2のメッシュ電極を流通した前記浮遊粒子状物質が付着するQCMセンサと、
前記放電針と前記第1のメッシュ電極との間、前記第1のメッシュ電極と前記第2のメッシュ電極との間、及び前記第2のメッシュ電極と前記QCMセンサとの間の各々に電位差を与える電圧発生部と、
前記浮遊粒子状物質の付着に伴う前記QCMセンサの共振周波数の変化に基づいて、前記浮遊粒子状物質の粒径分布を測定する測定部と、
を有することを特徴とする浮遊粒子状物質測定装置。
【0108】
(付記2) 前記電圧発生部は、
前記放電針に第1の電圧を与え、前記第1のメッシュ電極に第2の電圧を与え、前記第2のメッシュ電極に第3の電圧を与え、前記QCMセンサに第4の電圧を与えると共に、
前記第1の電圧、前記第2の電圧、前記第3の電圧、及び前記第4の電圧の全てを同一にする第1のステップと、
前記第2の電圧を前記第1の電圧よりも高くし、前記第3の電圧を前記第2の電圧よりも高くし、かつ、前記第4の電圧を前記第3の電圧よりも低くする第2のステップと、
前記第2の電圧を前記第1の電圧と同一にし、前記第3の電圧を前記第2の電圧よりも高くし、かつ、前記第4の電圧を前記第3の電圧よりも高くする第3のステップとをこの順に行い、
前記測定部は、前記第3のステップにおける前記共振周波数の変化に基づいて、前記浮遊粒子状物質の前記粒径分布を測定することを特徴とする付記1に記載の浮遊粒子状物質測定装置。
【0109】
(付記3) 前記測定部は、前記粒径分布の前記測定を開始した時刻からの経過時間に基づいて、前記浮遊粒子状物質の粒径分布を測定することを特徴とする付記1又は付記2に記載の浮遊粒子状物質測定装置。
【0110】
(付記4) 前記測定部は、前記共振周波数を前記経過時間で微分して得られたグラフを前記粒径分布とすることを特徴とする付記3に記載の浮遊粒子状物質測定装置。
【0111】
(付記5) 前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサを収容する筐体と、
前記筐体の内部に大気を取り込むファンとを更に有することを特徴とする付記1乃至付記4のいずれかに記載の浮遊粒子状物質測定装置。
【0112】
(付記6) 前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサが同一の軸上に設けられ、
前記ファンの回転軸の延長線が、前記第1のメッシュ電極と前記第2のメッシュ電極との間において前記軸と直交することを特徴とする付記5に記載の浮遊粒子状物質測定装置。
【0113】
(付記7) 前記QCMセンサは、水晶振動子と、該水晶振動子の両主面の各々に形成された第1の電極及び第2の電極とを備え、
前記第1の電極が前記第2のメッシュ電極と対向して設けられ、前記第1の電極と前記第2のメッシュ電極との間に前記電位差が与えられることを特徴とする付記1乃至付記6のいずれかに記載の浮遊粒子状物質測定装置。
【0114】
(付記8) 前記放電針と前記第1のメッシュ電極との前記電位差は、前記放電針の前記先端において放電が発生し得る値であることを特徴とする付記1乃至付記7のいずれかに記載の浮遊粒子状物質測定装置。
【0115】
(付記9) 大気中の一部領域において、該大気に含まれる浮遊粒子状物質を帯電させるステップと、
前記一部領域と、該一部領域から間隔をおいて設けられたQCMセンサとの間に電位差を付与することにより、帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップと、
前記電位差を付与してからの経過時間を前記浮遊粒子状物質の粒径に対応付けると共に、前記経過時間に伴う前記QCMセンサの共振周波数の変化をモニタすることにより、前記浮遊粒子状物質の粒径分布を測定するステップと、
を有すること浮遊粒子状物質測定方法。
【0116】
(付記10) 前記浮遊粒子状物質を帯電させるステップは、互いに対向する第1のメッシュ電極と第2のメッシュ電極によって前記一部領域を画定すると共に、前記第1のメッシュ電極から間隔をおいて放電針を設けて、該放電針と前記第1のメッシュ電極との間で放電を発生させることにより行われ、
帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップは、前記第2のメッシュ電極と前記QCMセンサとの間に前記電位差を付与することにより行われることを特徴とする付記7に記載の浮遊粒子状物質測定方法。
【符号の説明】
【0117】
1、30…浮遊粒子状物質測定装置、2…筐体、2a、2b…開口端、3…放電針、3a…先端、4…第1のメッシュ電極、5…第2のメッシュ電極、6…QCMセンサ、6a…第1の電極、6b…第2の電極、6c…水晶振動子、7…ファン、11…電圧発生部、12…制御部、13…発振回路、14…周波数カウンタ、15…ファン制御回路、18…インバータ、31…導入ダクト、32…排気ダクト。
【特許請求の範囲】
【請求項1】
大気中で放電を生じさせる放電針と、
前記放電針の先端から間隔をおいて設けられ、前記大気に含まれる浮遊粒子状物質が流通する第1のメッシュ電極と、
前記第1のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記浮遊粒子状物質が流通する第2のメッシュ電極と、
前記第2のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記第2のメッシュ電極を流通した前記浮遊粒子状物質が付着するQCM(Quartz Crystal Microbalance)センサと、
前記放電針と前記第1のメッシュ電極との間、前記第1のメッシュ電極と前記第2のメッシュ電極との間、及び前記第2のメッシュ電極と前記QCMセンサとの間の各々に電位差を与える電圧発生部と、
前記浮遊粒子状物質の付着に伴う前記QCMセンサの共振周波数の変化に基づいて、前記浮遊粒子状物質の粒径分布を測定する測定部と、
を有することを特徴とする浮遊粒子状物質測定装置。
【請求項2】
前記測定部は、前記粒径分布の前記測定を開始した時刻からの経過時間に基づいて、前記浮遊粒子状物質の粒径分布を測定することを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項3】
前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサを収容する筐体と、
前記筐体の内部に大気を取り込むファンとを更に有することを特徴とする請求項1又は請求項2に記載の浮遊粒子状物質測定装置。
【請求項4】
前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサが同一の軸上に設けられ、
前記ファンの回転軸の延長線が、前記第1のメッシュ電極と前記第2のメッシュ電極との間において前記軸と直交することを特徴とする請求項3に記載の浮遊粒子状物質測定装置。
【請求項5】
大気中の一部領域において、該大気に含まれる浮遊粒子状物質を帯電させるステップと、
前記一部領域と、該一部領域から間隔をおいて設けられたQCMセンサとの間に電位差を付与することにより、帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップと、
前記電位差を付与してからの経過時間を前記浮遊粒子状物質の粒径に対応付けると共に、前記経過時間に伴う前記QCMセンサの共振周波数の変化をモニタすることにより、前記浮遊粒子状物質の粒径分布を測定するステップと、
を有すること浮遊粒子状物質測定方法。
【請求項1】
大気中で放電を生じさせる放電針と、
前記放電針の先端から間隔をおいて設けられ、前記大気に含まれる浮遊粒子状物質が流通する第1のメッシュ電極と、
前記第1のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記浮遊粒子状物質が流通する第2のメッシュ電極と、
前記第2のメッシュ電極と前記放電針との間隔よりも広い間隔をおいて前記放電針から離れて設けられ、前記第2のメッシュ電極を流通した前記浮遊粒子状物質が付着するQCM(Quartz Crystal Microbalance)センサと、
前記放電針と前記第1のメッシュ電極との間、前記第1のメッシュ電極と前記第2のメッシュ電極との間、及び前記第2のメッシュ電極と前記QCMセンサとの間の各々に電位差を与える電圧発生部と、
前記浮遊粒子状物質の付着に伴う前記QCMセンサの共振周波数の変化に基づいて、前記浮遊粒子状物質の粒径分布を測定する測定部と、
を有することを特徴とする浮遊粒子状物質測定装置。
【請求項2】
前記測定部は、前記粒径分布の前記測定を開始した時刻からの経過時間に基づいて、前記浮遊粒子状物質の粒径分布を測定することを特徴とする請求項1に記載の浮遊粒子状物質測定装置。
【請求項3】
前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサを収容する筐体と、
前記筐体の内部に大気を取り込むファンとを更に有することを特徴とする請求項1又は請求項2に記載の浮遊粒子状物質測定装置。
【請求項4】
前記放電針、前記第1のメッシュ電極、前記第2のメッシュ電極、及び前記QCMセンサが同一の軸上に設けられ、
前記ファンの回転軸の延長線が、前記第1のメッシュ電極と前記第2のメッシュ電極との間において前記軸と直交することを特徴とする請求項3に記載の浮遊粒子状物質測定装置。
【請求項5】
大気中の一部領域において、該大気に含まれる浮遊粒子状物質を帯電させるステップと、
前記一部領域と、該一部領域から間隔をおいて設けられたQCMセンサとの間に電位差を付与することにより、帯電した前記浮遊粒子状物質を静電力により前記QCMセンサに引き付けるステップと、
前記電位差を付与してからの経過時間を前記浮遊粒子状物質の粒径に対応付けると共に、前記経過時間に伴う前記QCMセンサの共振周波数の変化をモニタすることにより、前記浮遊粒子状物質の粒径分布を測定するステップと、
を有すること浮遊粒子状物質測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−96722(P2013−96722A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−236984(P2011−236984)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]