
浮遊粒子状物質測定装置
【課題】
相対湿度の変動による影響を排除して測定精度の向上を実現する浮遊粒子状物質測定装置を提供する。
【解決手段】
湿度センサ50により検出ユニット20内の試料大気ガスの湿度を測定し、ヒータユニット32による試料大気ガスの加温、または、冷却ユニット33による試料大気ガスの冷却を必要時に行って試料大気ガスの湿度を一定となるように制御し、相対湿度の変動による影響を排除して測定精度の向上を実現するような浮遊粒子状物質測定装置とした。
相対湿度の変動による影響を排除して測定精度の向上を実現する浮遊粒子状物質測定装置を提供する。
【解決手段】
湿度センサ50により検出ユニット20内の試料大気ガスの湿度を測定し、ヒータユニット32による試料大気ガスの加温、または、冷却ユニット33による試料大気ガスの冷却を必要時に行って試料大気ガスの湿度を一定となるように制御し、相対湿度の変動による影響を排除して測定精度の向上を実現するような浮遊粒子状物質測定装置とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、気体中の浮遊粒子状物質濃度を測定する浮遊粒子状物質測定装置に関する。
【背景技術】
【0002】
浮遊粒子状物質(SPM:Suspended Particulate Matter)とは、大気中に浮遊する粒子状物質のうち、直径が10μm(1μm=千分の1mm)以下の固体及び液体粒子などである。この浮遊粒子状物質は、煤煙発生施設や自動車からの排出粒子などの人為的発生源によるものや土壌や花粉などの自然的発生源によって発生されるものであり、さらに大気中で物理的・化学的作用を受けている。その主要な成分としては、重金属元素(Fe、Cu、Pb、Zn等)、無機酸の塩類(SO42−、NO3−)、炭素系化合物等が含まれている。ちなみに浮遊粒子状物質はエアロゾルと呼ばれることもある。
なお、国内においては、10μm以上の粒子を100%カットと定義して「SPM」としているが、海外においては、10μmまたはそれ以上の粒子を50%カットと定義して「PM10」と呼んでいる。
【0003】
このような浮遊粒子状物質については、肺や呼吸器に沈着するなど呼吸器へ影響を及ぼす大気汚染等の原因とされていることから、環境基準(人の健康を保護する上で維持することが望ましい基準)が設定されており、浮遊粒子状物質濃度が1時間値の1日平均値で0.10mg/m3以下であり、かつ、1時間値で0.20mg/m3以下であることと定められている。
【0004】
また、近年では、浮遊粒子状物質のうち、粒子径が10μm以下のもの(以下、10μm以上の粒子を100%カットしたものを「SPM」、10μmまたはそれ以上の粒子を50%カットしたものを「PM10」という)に代えて、粒子径が2.5μm以下のもの(以下、2.5μmまたはそれ以上の粒子を50%カットしたものを「PM2.5」という)が測定対象として重視されつつある。
【0005】
さて、これら大気中のSPMまたはPM10またはPM2.5という浮遊粒子状物質の計測手段として、浮遊粒子状物質を濾紙上に捕集し、β線吸収方式等を用いてその質量濃度を測定する浮遊粒子状物質測定装置が従来より周知である。
この浮遊粒子状物質測定装置によれば、浮遊粒子状物質の捕集及び濃度の測定といった一連の測定動作を全自動化することが可能である。
【0006】
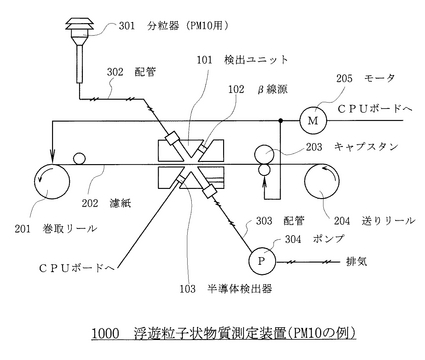
このような浮遊粒子状物質測定装置の従来技術について図を参照しつつ説明する。
図4は従来技術の浮遊粒子状物質測定装置(PM10の例)の要部説明図である。浮遊粒子状物質測定装置1000の測定部は、図4で示すように、検出ユニット101、β線源102、半導体検出器103、巻取リール201、濾紙202、キャプスタン203、送りリール204、モータ205、分粒器(PM10用)301、配管302、配管303、ポンプ304を備えている。
【0007】
この浮遊粒子状物質測定装置による測定処理について説明する。
ポンプ304の吸引により分粒器301、配管302,検出ユニット101、配管303、ポンプ304の経路で試料大気が流れ、浮遊粒子状物質を含む試料大気が検出ユニット101に導入される。検出ユニット101内には濾紙202が配置されており、濾紙202が浮遊粒子状物質を捕集する。捕集後の試料大気は、配管303、ポンプ304を経て排気される。
【0008】
上記浮遊粒子状物質に対し、β線吸収方式により浮遊粒子状物質濃度が測定される。このβ線吸収方式による濃度測定について説明する。
測定原理であるが、浮遊粒子状物質が未捕集状態である最新の濾紙202を通過させた場合のβ線強度Ioと、浮遊粒子状物質を捕集した状態の濾紙202を通過させた場合のβ線強度Iと、浮遊粒子状物質の単位質量当りのβ線吸収断面積kと、濾紙202の単位捕集面積当りの粒子の質量mと、全捕集面積Sと、積算吸引流量Vとを用いて、浮遊粒子状物質濃度Mは、次式のようになる。
【0009】
[数1]
M=(m/V)=(S/kV)ln(I0/I)
【0010】
これらS,k,Vを予めメモリ部(図示せず)に登録しておき、β線強度Io,β線強度Iを検出して浮遊粒子状物質濃度Mを算出する。
【0011】
CPUボード(図示せず)の濃度演算手段は、まず未捕集状態である最新の濾紙202を通過させた場合のβ線強度Ioを表す検出信号を入力してメモリ部に記憶する。続いて、所定期間にわたり浮遊粒子状物質を捕集した濾紙202を通過するβ線強度Iを表す検出信号を入力する。このとき、検出ユニット101では、捕集された浮遊粒子状物質に対してβ線源102からβ線が放射されると、β線の一部は濾紙202上の浮遊粒子状物質に吸収され、吸収されなかったβ線が半導体検出器103に入力される。半導体検出器103はβ線強度に比例する検出信号を出力する。このβ線強度Iを表す検出信号を濃度演算手段が入力してメモリ部に記憶する。濃度演算手段は、メモリ部からS,k,V,Io,Iを読み出して上記数式1による演算を行って、浮遊粒子状物質濃度M(mg/m3)を算出している。
【0012】
そして、計測終了後にモータ205がCPUボードの駆動手段により駆動されて、巻取リール201・キャプスタン203が回転し、送りリール204から濾紙202が繰り出されて新しい部分がセットされるとともに、巻取リール201が濾紙202の使用済み部分を収容する。
浮遊粒子状物質測定装置1000の概略はこのようなものである。
【0013】
さて、上記浮遊粒子状物質測定装置では、計測精度が湿度により影響されることが知られている。湿度が高い大気から収集した試料大気を用いると、水分や水分を含む浮遊粒子状物質なども濾紙202に捕集される。この水分はβ線を遮蔽する機能を有している。
このため、浮遊粒子状物質によるβ線の吸収以外にも水分がβ線を透過させないこととなってβ線強度が減少し、湿度が高い場合には実際よりも浮遊粒子状物質濃度が高く測定されるおそれがある。そこで、従来技術では一般的に試料大気の湿度を所定値以下に抑えることで湿度の影響を取り除いている。
【0014】
例えば、外国論文に係る非特許文献1では浮遊粒子状物質の測定では試料大気をヒータにより30℃まで加温することで、湿度を60%以下に減らすことが記載されている。
また、特許文献1には、浮遊粒子状物質測定装置に類似した構成を有するダスト放射線モニタが記載され、湿度の影響を取り除くためにヒータにより加温する点が記載されている。なお、特許文献1では測定精度を向上する目的ではなく、濾紙の送りを円滑にするために濾紙を乾燥させている。
【0015】
更に、特許文献2には、野菜等を保存する低温高湿度の雰囲気を形成するための低温高湿度検出装置及び制御装置が記載されている。
この低温高湿度検出装置は、空気を予め所定温度だけ加熱して相対湿度を検出し、加熱により低くなる相対湿度分を予め定めておき、この相対湿度の中から検出した相対湿度に対応するものを求めて検出した相対湿度に加算することにより、検出した相対湿度を補正して加熱前の雰囲気における空気の相対湿度を求めるものである。
また、低温高湿度制御装置は、上述の補正した相対湿度と設定湿度とを比較して得た制御信号により、加湿器を運転または停止して雰囲気中の相対湿度を設定湿度に制御するものである。
【0016】
【非特許文献1】Albert Chung et al. "Comparison of Real-Time Instruments Used To Monitor Airborne Particulate Matter", Journal of the Air & Waste Management Association,January 2001, Volume 51, Number 1,p109−p120
【特許文献1】特開平7−244163号公報(段落番号0017,図1)
【特許文献2】特許第3145201号公報(請求項1,請求項2)
【発明の開示】
【発明が解決しようとする課題】
【0017】
浮遊粒子状物質測定では標準測定法として手分析法が規定されており、この手分析での濾紙秤量前のコンディショニング条件は国内で湿度50%となっている。そこで、浮遊粒子状物質測定装置でも、濾紙202を湿度50%のコンディショニング条件で計測することが望ましい
しかしながら、従来技術の浮遊粒子状物質測定装置では、相対湿度を所定値以下(例えば相対湿度60%以下)にして浮遊粒子状物質濃度Mの測定を行っており、例えば、相対湿度30%,50%という場合であっても測定が可能であった。例えば、手分析のコンディショニング条件である湿度50%よりも試料大気の湿度が低い場合(例えば30%の場合)には、検出ユニット101内の湿度も低くなるため、捕集粒子の水分吸着率が異なり、手分析による浮遊粒子状物質濃度Mと異なるという問題があった。浮遊粒子状物質測定装置でも手分析と同程度の浮遊粒子状物質濃度Mを得ることができれば、高精度に自動測定することが可能になるので、その改善が要請されていた。
【0018】
そこで、β線吸収方式の分析値と手分析値とを一致させるため、試料大気の相対湿度を手分析値でのコンディショニング条件である50%で測定すれば測定精度の向上が見込めるが、現状のβ線吸収方式による浮遊粒子状物質測定では、相対湿度の変動による影響を排除した上で測定することは困難であった。
また、特許文献1に記載されたダストモニタは、濾紙を乾燥させる目的であって相対湿度を著しく低くするものであり、相対湿度が50%よりも低くなって浮遊粒子状物質濃度が手分析値より少なく測定されるという問題があった。
【0019】
更に、特許文献2に記載された低温高湿度検出装置では、空気を予め加熱する加熱手段や、加熱により低下する相対湿度分を検出相対湿度に加算して補正する補正手段が必須であるため、装置の構成が複雑になるという問題があり、低温高湿度制御装置においても、上記加熱手段、補正手段に加えて加湿器を制御する制御手段が必要である。
【0020】
そこで、本発明は上記問題点を解決するためになされたものであり、その目的は、相対湿度の変動による影響を排除し、手分析法と比べて遜色ない測定精度が得られるようにした、構成が簡単な浮遊粒子状物質測定装置を提供することにある。
【課題を解決するための手段】
【0021】
上記目的を達成するため、本発明の請求項1に係る浮遊粒子状物質測定装置は、
粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、試料大気の湿度を調整する湿度調整手段と、検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出する濃度算出手段と、湿度計測手段からの湿度信号に基づいて試料大気が設定湿度となるように湿度調整手段を駆動する駆動手段と、を備え、濃度算出手段が、設定湿度の試料大気から浮遊粒子状物質濃度を測定することを特徴とする。
【0022】
また、本発明の請求項2に係る浮遊粒子状物質測定装置は、請求項1に記載の浮遊粒子状物質測定装置において、
前記湿度調整手段は、試料大気を加温または冷却することにより湿度を調整する手段であることを特徴とする。
【0023】
また、本発明の請求項3に係る浮遊粒子状物質測定装置は、粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出するとともに、湿度計測手段からの湿度信号に基づいて設定湿度における浮遊粒子状物質濃度となるように、算出した浮遊粒子状物質濃度を補正する濃度演算手段と、を備えたことを特徴とする。
【0024】
また、本発明の請求項4に係る浮遊粒子状物質測定装置は、請求項1〜請求項3の何れか一項に記載の浮遊粒子状物質測定装置において、
前記湿度を計測する湿度計測手段は、検出手段に一体的に配置され、β線強度の検出箇所における試料大気の湿度を計測する手段であることを特徴とする。
【発明の効果】
【0025】
以上のような本発明によれば、相対湿度の変動による影響を湿度調整手段の動作または演算による補正処理によって排除し、標準測定法である手分析法と同等の測定精度を達成することができる。このため、浮遊粒子状物質濃度を高精度かつ自動的、連続的に測定する測定装置の実現が可能になる。
また、装置の構成が複雑化することもなく、比較的低コストにて提供することも可能である。
【発明を実施するための最良の形態】
【0026】
続いて本発明を実施するための最良の形態の浮遊粒子状物質測定装置について図を参照しつつ説明する。
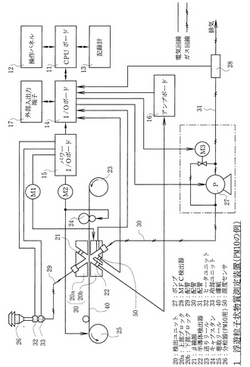
図1は本形態の浮遊粒子状物質測定装置(PM10の例)1の構成図、図2は相対湿度によるβ線吸収方式分析値と手分析値との誤差を説明する特性図である。なお、従来技術と構成が一部重複するが、新たな符号を付すとともに再度説明する。
浮遊粒子状物質測定装置1は、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17、検出ユニット20、β線源21、半導体検出器22、送りリール23、キャプスタン24、巻取リール25、分粒器(PM10用)26、ポンプ27、MFC検出器28、配管29,30,31、ヒータユニット32、冷却ユニット33、濾紙40、湿度センサ50、モータM1,M2,M3を備えている。
これらは、大別すると試料大気採取手段、捕集手段、検出手段、湿度計測手段、湿度調整手段、濃度算出手段、駆動手段となる。以下、各手段について説明する。
【0027】
まず、試料大気採取手段について説明する。試料大気採取手段は、粒子径が所定粒径以下(SPMで10μm(10μm以上で100%カット)、PM10で10μm(10μmまたはそれ以上で50%カット)、PM2.5で2.5μm(2.5μmまたはそれ以上で50%カット))である浮遊粒子状物質を含む試料大気を採取する手段である。例えば本形態のように、分粒器26、配管29、検出ユニット20、濾紙40、配管30、ポンプ27、配管31、MFC検出器28を備える。ポンプ27が吸引動作を行うと、試料大気が分粒器26→配管29→検出ユニット20→濾紙40→配管30→ポンプ27→配管31→MFC検出器28と通流して外部へ排気される。
なお、検出ユニット20は、略直方体形状の上部ブロック20aと下部ブロック20bで形成され、上部ブロック20aには配管29と接続される流路が設けられ、下部ブロック20bには上側の流路と対向するように下側の流路が設けられている。この上部ブロック20aと下部ブロック20bとの間に濾紙40が配置される。
【0028】
上述した流路系において、ポンプ27の下流側にMFC(Mass Flow Calculator(またはController))検出器28が配置され、通流する試料大気ガスの流量を正確に計測して流量信号が出力される。その流量信号はI/Oボード14を介してCPUボード11に入力されている。更に、ポンプ27をバイパスする流路にはバルブが設けられ、このバルブには流量安定用のモータM3が接続されており、CPUボード11からの駆動信号によりモータM3を駆動してバルブを開閉制御する。このような構成により流量を一定量とし、先の数式1における積算吸引流量Vを正確にする。これにより分粒器26は、試料大気を一定流量で吸引することとなる。
【0029】
分粒器(PM10用)26は、例えば試料大気中の粗大粒子の慣性衝突を用いてPM10の分粒を行なうインパクタ方式分粒器であり、試料大気から粗大粒子を取り除き、粒子径が10μm以下(50%カット)の浮遊粒子を透過させた試料大気を得る。
また、PM2.5(粒径2.5μmの浮遊粒子)については、後段にサイクロン方式の分粒器またはインパクタ方式分粒器を設置して、2.5μm以下の微粒子を選択的に分粒しても良い。これらは測定対象に応じて適宜選択される。
【0030】
上述したような浮遊粒子状物質を含む試料大気は、捕集手段を通過する。
捕集手段は、試料大気から浮遊粒子状物質を連続的に捕集する手段である。例えば本形態のように送りリール23、キャプスタン24、巻取リール25、濾紙40、モータM1、モータM2を備える。モータM1、モータM2の駆動信号はパワーI/Oボード15を介してCPUボード11から出力されている。
テープ状の濾紙40は、未使用の濾紙40を供給する送りリール23と、使用済みの濾紙40をロール状に巻回して収容する巻取リール25と、により送り可能になされており、検出ユニット20内に一定長さが供給される。
モータM1は検出ユニット20aの下部ブロック20bを上下動させ、検出ユニット20内に搬送された浮遊粒子状物質捕集用の濾紙40を上下から挟み込むための開閉動作用モータ、モータM2は濾紙40の送り用モータである。この濾紙40は、モータM1により検出ユニット20が開かれた状態で、モータM2により巻取リール25及びキャプスタン24を回転駆動することにより、一定周期(例えば1時間おき)経過後に濾紙40の未使用部分が送りリール23、キャプスタン24を経て検出ユニット20内へ送られるとともに、同じ長さだけ巻取リール25に収容される。
【0031】
検出手段は、捕集手段で捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する手段である。例えば本形態のように、β線源21、半導体検出器22を備える。半導体検出器22の出力信号はアンプボード16内のアンプにより増幅され、I/Oボード14を介してCPUボード11に入力されている。
検出ユニット20の上部ブロック20aにはβ線源21が、下部ブロック20bにはβ線源21と対向するように半導体検出器22が設けられており、先に説明した流路とβ線放射方向が交差するように配置される。この上部ブロック20aと下部ブロック20bとの間を濾紙40が通過する。検出手段の検出原理は先に説明した従来技術と同様にβ線吸収方式を採用しており、重複する説明を省略する。
【0032】
湿度計測手段は、試料大気の湿度を計測して湿度信号を出力する手段であり、検出手段に一体的に配置され、β線強度の検出箇所の湿度を計測する手段である。例えば本形態のように、湿度センサ50である。この湿度センサ50は、検出ユニット20のうち半導体検出器22の近傍に配置される。これにより試料大気の検出時の湿度を一定にして、計測精度を高めている。湿度センサ50の出力信号はI/Oボード14を介してCPUボード11に入力されている。
【0033】
濃度算出手段は検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出する手段であり、また、駆動手段は湿度信号に基づいて目標湿度となるように湿度調整手段を駆動するための駆動信号を出力する手段である。例えば本形態のように、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17を備え、濃度算出手段および駆動手段を共通構成とする。なお、濃度算出・駆動動作については後述する。
【0034】
湿度調整手段は、駆動信号に基づいて試料大気の湿度を調整する手段である。例えば本形態のように、試料大気を加温するヒータユニット32、試料大気を冷却する冷却ユニット33を備える。ヒータユニット32、冷却ユニット33の駆動信号はCPUボード11から出力され、パワーI/Oボード15により電力増幅される。
【0035】
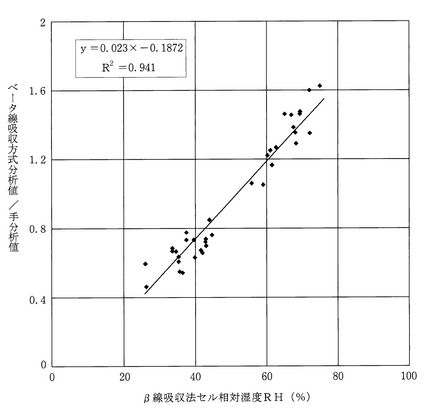
続いて、本形態における湿度調整について図を参照しつつ説明する。図2の特性図は、β線吸収法による検出ユニット(セル)20内の相対湿度(RH)に対するβ線吸収方式分析値と手分析値との誤差を表しており、手分析でのコンディショニング条件である相対湿度50%において、β線吸収方式による浮遊粒子状物質濃度Mと、手分析による浮遊粒子状物質濃度Mとが一致する。そこで、検出ユニット20内のコンディショニング条件を相対湿度50%に維持することで、手分析と同じ値が求められることとなり計測精度を高められる。
【0036】
次に、湿度調整を行う各部の動作について説明する。
ポンプ27の動作により試料大気を分粒器26・配管29を経て検出ユニット20へ導入し、濾紙40の表面で浮遊粒子状物質を捕集しているものとする。このような状況下で試料大気に対して湿度調節動作を行っている。湿度センサ50は、検出ユニット20内の試料大気の湿度を計測して湿度信号を出力している。CPUボード11では図示しないメモリ部に設定湿度50%が記憶されている。
【0037】
湿度センサ50から出力される湿度信号により、相対湿度が50%より高いとCPUボード11は湿度調整手段を駆動する駆動手段としてのパワーI/Oボード15を介して湿度調整手段であるヒータユニット32を加温駆動する。すると試料大気が加温されて温度上昇することにより相対湿度が低くなっていき、試料大気の相対湿度が50%となるように維持される。
一方、湿度センサ50から出力される湿度信号により、相対湿度が50%より低いとCPUボードは湿度調整手段を駆動する駆動手段としてのパワーI/Oボード15を介して湿度調整手段である冷却ユニット33を冷却駆動する。すると試料大気が冷却されて温度降下することにより相対湿度が高くなっていき、試料大気の相対湿度が50%となるように維持される。
これらの試料大気の加温・冷却は、必要時のみ行うこととなる。
【0038】
なお、手分析値と一致させるために設定湿度を50%としているが、湿度は50%に限定する趣旨ではなく異ならせても良い。例えば、海外では上記した手分析のコンディショニング条件が30%〜40%であるため、必要に応じて設定湿度30%〜40%としても良い。これら設定湿度は事情に応じて適宜変更することができる。
【0039】
次に、上記浮遊粒子状物質測定装置により相対湿度を一定に維持した状態において大気中の浮遊粒子状物質濃度を連続測定する動作について説明する。
オペレータが操作パネル12を操作すると、測定を開始する操作信号がCPUボード11へ入力される。CPUボード11は各部へ制御信号を出力する。このとき既に検出ユニット20には濾紙40の未捕集部分が載置され、上部ブロック20aと下部ブロック20bとにより強固に挟持されるともに、β線が漏出しないように密封されるものとする。
まず、ベータ線源21によりβ線を照射する。そして、半導体検出器22からの検出信号が、CPUボード11のメモリ部に一時的に記憶される。一番最初に記憶された検出信号は、β線強度I0となる。
【0040】
続いて、I/Oボード14を介してポンプ27へ駆動信号を出力する。大気中から試料大気が吸引され、試料大気の採取が開始される。この場合、上記したようにMFC検出部28からの流量信号はI/Oボード14を介してCPUボード11に入力されており、所定設定流量を維持するような駆動信号を、I/Oボード14を介してモータM3へ送信する。このため、モータM3によりバルブが開閉制御されて流量が所定設定流量となるように調節される。
【0041】
ポンプ27が所定時間作動して予め決められた流量の試料大気が吸引されると、CPUボード11がポンプ27の稼働を停止し、試料大気の採集は停止される。次に、ベータ線源21によりβ線を再度照射する。そして、半導体検出器22からの検出信号が、CPUボード11のメモリに一時的に記憶され、この検出信号がβ線強度Iとなる。
次いで、メモリに登録されたβ線強度I0 、β線強度Iに加え、前記定数S,k,Vを読み出し、数式1に基づいてβ線吸収方式により浮遊粒子状物質濃度Mを算出する。この浮遊粒子状物質濃度MをCPUボード11が記録計13に記録する。
【0042】
記録終了後、濾紙40を移動させる。まず、CPUボード11はI/Oボード14、パワーI/Oボード15を介してモータM1を駆動し、検出ユニット20の下部ブロック20bを降下させて濾紙40を移動可能な状態とする。続いて、CPUボード11はI/Oボード14、パワーI/Oボード15を介してモータM2を駆動して濾紙40を送り、未使用部分を検出ユニット20に配置する。そして、下部ブロック20bが上昇して最初の状態に戻り、以後、同様の動作を繰り返して自動的に浮遊粒子状物質測定を行うものである。
【0043】
以上、本形態の浮遊粒子状物質測定装置1について説明した。
なお、先に説明した設定湿度は予めCPUボード11のメモリ部に設定登録されているものとして説明したが、例えば、操作パネル12を介してCPUボード11のメモリ部に新たに登録できるようにしても良い。
また、浮遊粒子状物質濃度Mを記録計13に記録するものとして説明したが、さらにI/Oボード14に接続された表示部(図示しない)を搭載し、浮遊粒子状物質濃度Mを表示させても良い。
【0044】
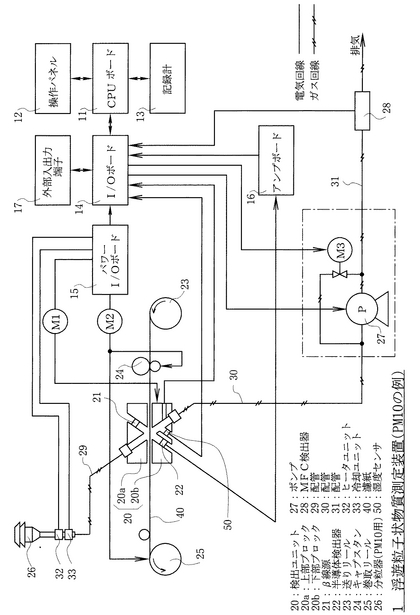
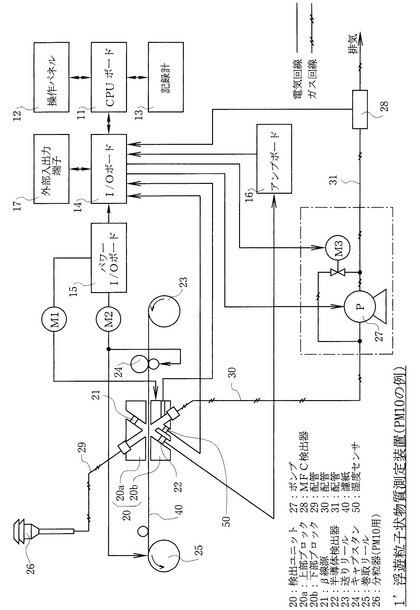
続いて、本発明の他の形態について説明する。図3は本形態の浮遊粒子状物質測定装置(PM10の例)1’の構成図である。なお、先に説明した形態と構成が一部重複するため、相違点のみ重点的に説明する。
浮遊粒子状物質測定装置(PM10の例)1’は、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17、検出ユニット20、β線源21、半導体検出器22、送りリール23、キャプスタン24、巻取リール25、分粒器(PM10用)26、ポンプ27、MFC検出器28、配管29,30,31、濾紙40、湿度センサ50、モータM1,M2,M3を備えている。先に説明した図1の形態におけるヒータユニット32、冷却ユニット33がなく、簡略化された形態である。
これらは、試料大気採取手段、捕集手段、検出手段、湿度計測手段、濃度算出手段、を備える。以下、各手段について説明する。
【0045】
まず、試料大気採取手段は、試料大気を採取する手段であり、分粒器26、配管29、検出ユニット20、濾紙40、配管30、ポンプ27、配管31、MFC検出器28とを備え、先の説明と同様に動作する。
捕集手段は、試料大気から浮遊粒子状物質を連続的に捕集する手段であり、送りリール23、キャプスタン24、巻取リール25、濾紙40、モータM1、モータM2を備え、先の説明と同様に動作する。
【0046】
湿度計測手段は、試料大気の湿度を計測して湿度信号を出力する手段であり、例えば湿度センサ50により構成されていて先の説明と同様に動作する。
濃度算出手段は検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出するとともに、湿度信号に基づいて設定湿度における浮遊粒子状物質濃度となるように演算処理によって補正を行う手段である。例えば本形態のように、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17を備える。
【0047】
続いて湿度補正機能について説明する。先の図2で示したように、検出ユニット20内の相対湿度とβ線吸収方式値/手分析値との関係を数式で表すと、以下のようになる。
【0048】
【数2】

【0049】
ここでFRMは手分析相当値、aは傾き、RHは測定された検出ユニット内の湿度、bは切片、Mはβ線吸収方式により求めた濃度である。本形態では、測定により求めたβ線吸収方式値の浮遊粒子状物質濃度Mを、上記数式2を用いて、相対湿度50%相当である手分析値による浮遊粒子状物質濃度FRMに補正するものである。このような補正により、相対湿度の影響を排除して手分析と同等の浮遊粒子状物質濃度を求め、計測精度を高めている。
なお、上記a,bは図2のグラフから例えば最小自乗法等により算出されるものであり、本形態ではa=0.023,b=0.1872という値となった。なお、当然ながら、これら値は実際の装置では設計変更等の各種要因により変化するが、その場合でも実験的に算出できることはいうまでもない。実験により相対湿度と、浮遊粒子状物質濃度のβ線吸収方式値/手分析値とを算出していき、最小自乗法等により係数a,bを割り出せば良い。
【0050】
次に、各部の動作について説明する。
まず、前述した方法によりβ線強度I0,β線強度I,m,S,Vを取得する。そして、CPUボード11は前記数式1に基づいてβ線吸収方式により浮遊粒子状物質濃度Mを算出し、この浮遊粒子状物質濃度Mを先に掲げた数式2により手分析相当値の浮遊粒子状物質濃度FRMに補正する。そしてCPUボード11は、この浮遊粒子状物質濃度FRMを記録計13により記録させる。その他の動作は、先に説明した浮遊粒子状物質測定装置1がヒータユニット32や冷却ユニット33を用いて湿度調整する点を除けば、浮遊粒子状物質測定装置1と同様である。
【0051】
以上、本発明の浮遊粒子状物質測定装置について説明した。
これらの浮遊粒子状物質測定装置(PM10の例)1,1’によれば、相対湿度の影響を排除し、β線吸収方式で測定する浮遊粒子状物質濃度を標準測定法による手分析値と一致させることができる。
また、本発明においては、従来の浮遊粒子状物質測定装置に湿度センサやヒータユニット、冷却ユニットを付加し、その制御プログラムを追加したり、数式2による補正演算用の簡単なプログラムを追加するだけで実現可能であり、比較的低コストにて提供することが可能である。
なお、前記湿度計測手段としての湿度センサ50に代えて、検出ユニット20内に温度センサを設置して検出ユニット20内の温度を計測することにより、そこから検出ユニット20内のその温度での飽和水蒸気圧を計算により求め、更に試料大気を採取する手段としての分粒器26近傍に温度センサ及び湿度センサを設置して試料大気自体の温度、相対湿度を計測するとそこから試料大気自体のその温度での水蒸気圧がわかり、そこから更に試料大気自体の飽和水蒸気圧を計算することにより、前記試料大気自体の飽和水蒸気圧と前記検出ユニット20内の飽和水蒸気圧との比から検出ユニット20内の相対湿度を求めることができる。この相対湿度の値を湿度信号として出力することによって本発明を実施することも可能である。
【図面の簡単な説明】
【0052】
【図1】本発明の実施するための最良の形態の浮遊粒子状物質測定装置の構成図である。
【図2】相対湿度によるβ線吸収方式分析値と手分析値との誤差を説明する特性図である。
【図3】本発明の実施形態を示す概略的な全体構成図である。
【図4】従来技術の浮遊粒子状物質測定装置の要部説明図である。
【符号の説明】
【0053】
1,1’:浮遊粒子状物質測定装置(PM10の例)
11:CPUボード
12:操作パネル
13:記録計
14:I/Oボード
15:パワーI/Oボード
16:アンプボード
17:外部入出力端子
20:検出ユニット
21:β線源
22:半導体検出器
23:送りリール
24:キャプスタン
25:巻取リール
26:分粒器(PM10用)
27:ポンプ
28:MFC検出器
29:配管
30:配管
31:配管
32:ヒータユニット
33:冷却ユニット
40:濾紙
50:湿度センサ
M1,M2,M3:モータ
【技術分野】
【0001】
本発明は、気体中の浮遊粒子状物質濃度を測定する浮遊粒子状物質測定装置に関する。
【背景技術】
【0002】
浮遊粒子状物質(SPM:Suspended Particulate Matter)とは、大気中に浮遊する粒子状物質のうち、直径が10μm(1μm=千分の1mm)以下の固体及び液体粒子などである。この浮遊粒子状物質は、煤煙発生施設や自動車からの排出粒子などの人為的発生源によるものや土壌や花粉などの自然的発生源によって発生されるものであり、さらに大気中で物理的・化学的作用を受けている。その主要な成分としては、重金属元素(Fe、Cu、Pb、Zn等)、無機酸の塩類(SO42−、NO3−)、炭素系化合物等が含まれている。ちなみに浮遊粒子状物質はエアロゾルと呼ばれることもある。
なお、国内においては、10μm以上の粒子を100%カットと定義して「SPM」としているが、海外においては、10μmまたはそれ以上の粒子を50%カットと定義して「PM10」と呼んでいる。
【0003】
このような浮遊粒子状物質については、肺や呼吸器に沈着するなど呼吸器へ影響を及ぼす大気汚染等の原因とされていることから、環境基準(人の健康を保護する上で維持することが望ましい基準)が設定されており、浮遊粒子状物質濃度が1時間値の1日平均値で0.10mg/m3以下であり、かつ、1時間値で0.20mg/m3以下であることと定められている。
【0004】
また、近年では、浮遊粒子状物質のうち、粒子径が10μm以下のもの(以下、10μm以上の粒子を100%カットしたものを「SPM」、10μmまたはそれ以上の粒子を50%カットしたものを「PM10」という)に代えて、粒子径が2.5μm以下のもの(以下、2.5μmまたはそれ以上の粒子を50%カットしたものを「PM2.5」という)が測定対象として重視されつつある。
【0005】
さて、これら大気中のSPMまたはPM10またはPM2.5という浮遊粒子状物質の計測手段として、浮遊粒子状物質を濾紙上に捕集し、β線吸収方式等を用いてその質量濃度を測定する浮遊粒子状物質測定装置が従来より周知である。
この浮遊粒子状物質測定装置によれば、浮遊粒子状物質の捕集及び濃度の測定といった一連の測定動作を全自動化することが可能である。
【0006】
このような浮遊粒子状物質測定装置の従来技術について図を参照しつつ説明する。
図4は従来技術の浮遊粒子状物質測定装置(PM10の例)の要部説明図である。浮遊粒子状物質測定装置1000の測定部は、図4で示すように、検出ユニット101、β線源102、半導体検出器103、巻取リール201、濾紙202、キャプスタン203、送りリール204、モータ205、分粒器(PM10用)301、配管302、配管303、ポンプ304を備えている。
【0007】
この浮遊粒子状物質測定装置による測定処理について説明する。
ポンプ304の吸引により分粒器301、配管302,検出ユニット101、配管303、ポンプ304の経路で試料大気が流れ、浮遊粒子状物質を含む試料大気が検出ユニット101に導入される。検出ユニット101内には濾紙202が配置されており、濾紙202が浮遊粒子状物質を捕集する。捕集後の試料大気は、配管303、ポンプ304を経て排気される。
【0008】
上記浮遊粒子状物質に対し、β線吸収方式により浮遊粒子状物質濃度が測定される。このβ線吸収方式による濃度測定について説明する。
測定原理であるが、浮遊粒子状物質が未捕集状態である最新の濾紙202を通過させた場合のβ線強度Ioと、浮遊粒子状物質を捕集した状態の濾紙202を通過させた場合のβ線強度Iと、浮遊粒子状物質の単位質量当りのβ線吸収断面積kと、濾紙202の単位捕集面積当りの粒子の質量mと、全捕集面積Sと、積算吸引流量Vとを用いて、浮遊粒子状物質濃度Mは、次式のようになる。
【0009】
[数1]
M=(m/V)=(S/kV)ln(I0/I)
【0010】
これらS,k,Vを予めメモリ部(図示せず)に登録しておき、β線強度Io,β線強度Iを検出して浮遊粒子状物質濃度Mを算出する。
【0011】
CPUボード(図示せず)の濃度演算手段は、まず未捕集状態である最新の濾紙202を通過させた場合のβ線強度Ioを表す検出信号を入力してメモリ部に記憶する。続いて、所定期間にわたり浮遊粒子状物質を捕集した濾紙202を通過するβ線強度Iを表す検出信号を入力する。このとき、検出ユニット101では、捕集された浮遊粒子状物質に対してβ線源102からβ線が放射されると、β線の一部は濾紙202上の浮遊粒子状物質に吸収され、吸収されなかったβ線が半導体検出器103に入力される。半導体検出器103はβ線強度に比例する検出信号を出力する。このβ線強度Iを表す検出信号を濃度演算手段が入力してメモリ部に記憶する。濃度演算手段は、メモリ部からS,k,V,Io,Iを読み出して上記数式1による演算を行って、浮遊粒子状物質濃度M(mg/m3)を算出している。
【0012】
そして、計測終了後にモータ205がCPUボードの駆動手段により駆動されて、巻取リール201・キャプスタン203が回転し、送りリール204から濾紙202が繰り出されて新しい部分がセットされるとともに、巻取リール201が濾紙202の使用済み部分を収容する。
浮遊粒子状物質測定装置1000の概略はこのようなものである。
【0013】
さて、上記浮遊粒子状物質測定装置では、計測精度が湿度により影響されることが知られている。湿度が高い大気から収集した試料大気を用いると、水分や水分を含む浮遊粒子状物質なども濾紙202に捕集される。この水分はβ線を遮蔽する機能を有している。
このため、浮遊粒子状物質によるβ線の吸収以外にも水分がβ線を透過させないこととなってβ線強度が減少し、湿度が高い場合には実際よりも浮遊粒子状物質濃度が高く測定されるおそれがある。そこで、従来技術では一般的に試料大気の湿度を所定値以下に抑えることで湿度の影響を取り除いている。
【0014】
例えば、外国論文に係る非特許文献1では浮遊粒子状物質の測定では試料大気をヒータにより30℃まで加温することで、湿度を60%以下に減らすことが記載されている。
また、特許文献1には、浮遊粒子状物質測定装置に類似した構成を有するダスト放射線モニタが記載され、湿度の影響を取り除くためにヒータにより加温する点が記載されている。なお、特許文献1では測定精度を向上する目的ではなく、濾紙の送りを円滑にするために濾紙を乾燥させている。
【0015】
更に、特許文献2には、野菜等を保存する低温高湿度の雰囲気を形成するための低温高湿度検出装置及び制御装置が記載されている。
この低温高湿度検出装置は、空気を予め所定温度だけ加熱して相対湿度を検出し、加熱により低くなる相対湿度分を予め定めておき、この相対湿度の中から検出した相対湿度に対応するものを求めて検出した相対湿度に加算することにより、検出した相対湿度を補正して加熱前の雰囲気における空気の相対湿度を求めるものである。
また、低温高湿度制御装置は、上述の補正した相対湿度と設定湿度とを比較して得た制御信号により、加湿器を運転または停止して雰囲気中の相対湿度を設定湿度に制御するものである。
【0016】
【非特許文献1】Albert Chung et al. "Comparison of Real-Time Instruments Used To Monitor Airborne Particulate Matter", Journal of the Air & Waste Management Association,January 2001, Volume 51, Number 1,p109−p120
【特許文献1】特開平7−244163号公報(段落番号0017,図1)
【特許文献2】特許第3145201号公報(請求項1,請求項2)
【発明の開示】
【発明が解決しようとする課題】
【0017】
浮遊粒子状物質測定では標準測定法として手分析法が規定されており、この手分析での濾紙秤量前のコンディショニング条件は国内で湿度50%となっている。そこで、浮遊粒子状物質測定装置でも、濾紙202を湿度50%のコンディショニング条件で計測することが望ましい
しかしながら、従来技術の浮遊粒子状物質測定装置では、相対湿度を所定値以下(例えば相対湿度60%以下)にして浮遊粒子状物質濃度Mの測定を行っており、例えば、相対湿度30%,50%という場合であっても測定が可能であった。例えば、手分析のコンディショニング条件である湿度50%よりも試料大気の湿度が低い場合(例えば30%の場合)には、検出ユニット101内の湿度も低くなるため、捕集粒子の水分吸着率が異なり、手分析による浮遊粒子状物質濃度Mと異なるという問題があった。浮遊粒子状物質測定装置でも手分析と同程度の浮遊粒子状物質濃度Mを得ることができれば、高精度に自動測定することが可能になるので、その改善が要請されていた。
【0018】
そこで、β線吸収方式の分析値と手分析値とを一致させるため、試料大気の相対湿度を手分析値でのコンディショニング条件である50%で測定すれば測定精度の向上が見込めるが、現状のβ線吸収方式による浮遊粒子状物質測定では、相対湿度の変動による影響を排除した上で測定することは困難であった。
また、特許文献1に記載されたダストモニタは、濾紙を乾燥させる目的であって相対湿度を著しく低くするものであり、相対湿度が50%よりも低くなって浮遊粒子状物質濃度が手分析値より少なく測定されるという問題があった。
【0019】
更に、特許文献2に記載された低温高湿度検出装置では、空気を予め加熱する加熱手段や、加熱により低下する相対湿度分を検出相対湿度に加算して補正する補正手段が必須であるため、装置の構成が複雑になるという問題があり、低温高湿度制御装置においても、上記加熱手段、補正手段に加えて加湿器を制御する制御手段が必要である。
【0020】
そこで、本発明は上記問題点を解決するためになされたものであり、その目的は、相対湿度の変動による影響を排除し、手分析法と比べて遜色ない測定精度が得られるようにした、構成が簡単な浮遊粒子状物質測定装置を提供することにある。
【課題を解決するための手段】
【0021】
上記目的を達成するため、本発明の請求項1に係る浮遊粒子状物質測定装置は、
粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、試料大気の湿度を調整する湿度調整手段と、検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出する濃度算出手段と、湿度計測手段からの湿度信号に基づいて試料大気が設定湿度となるように湿度調整手段を駆動する駆動手段と、を備え、濃度算出手段が、設定湿度の試料大気から浮遊粒子状物質濃度を測定することを特徴とする。
【0022】
また、本発明の請求項2に係る浮遊粒子状物質測定装置は、請求項1に記載の浮遊粒子状物質測定装置において、
前記湿度調整手段は、試料大気を加温または冷却することにより湿度を調整する手段であることを特徴とする。
【0023】
また、本発明の請求項3に係る浮遊粒子状物質測定装置は、粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出するとともに、湿度計測手段からの湿度信号に基づいて設定湿度における浮遊粒子状物質濃度となるように、算出した浮遊粒子状物質濃度を補正する濃度演算手段と、を備えたことを特徴とする。
【0024】
また、本発明の請求項4に係る浮遊粒子状物質測定装置は、請求項1〜請求項3の何れか一項に記載の浮遊粒子状物質測定装置において、
前記湿度を計測する湿度計測手段は、検出手段に一体的に配置され、β線強度の検出箇所における試料大気の湿度を計測する手段であることを特徴とする。
【発明の効果】
【0025】
以上のような本発明によれば、相対湿度の変動による影響を湿度調整手段の動作または演算による補正処理によって排除し、標準測定法である手分析法と同等の測定精度を達成することができる。このため、浮遊粒子状物質濃度を高精度かつ自動的、連続的に測定する測定装置の実現が可能になる。
また、装置の構成が複雑化することもなく、比較的低コストにて提供することも可能である。
【発明を実施するための最良の形態】
【0026】
続いて本発明を実施するための最良の形態の浮遊粒子状物質測定装置について図を参照しつつ説明する。
図1は本形態の浮遊粒子状物質測定装置(PM10の例)1の構成図、図2は相対湿度によるβ線吸収方式分析値と手分析値との誤差を説明する特性図である。なお、従来技術と構成が一部重複するが、新たな符号を付すとともに再度説明する。
浮遊粒子状物質測定装置1は、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17、検出ユニット20、β線源21、半導体検出器22、送りリール23、キャプスタン24、巻取リール25、分粒器(PM10用)26、ポンプ27、MFC検出器28、配管29,30,31、ヒータユニット32、冷却ユニット33、濾紙40、湿度センサ50、モータM1,M2,M3を備えている。
これらは、大別すると試料大気採取手段、捕集手段、検出手段、湿度計測手段、湿度調整手段、濃度算出手段、駆動手段となる。以下、各手段について説明する。
【0027】
まず、試料大気採取手段について説明する。試料大気採取手段は、粒子径が所定粒径以下(SPMで10μm(10μm以上で100%カット)、PM10で10μm(10μmまたはそれ以上で50%カット)、PM2.5で2.5μm(2.5μmまたはそれ以上で50%カット))である浮遊粒子状物質を含む試料大気を採取する手段である。例えば本形態のように、分粒器26、配管29、検出ユニット20、濾紙40、配管30、ポンプ27、配管31、MFC検出器28を備える。ポンプ27が吸引動作を行うと、試料大気が分粒器26→配管29→検出ユニット20→濾紙40→配管30→ポンプ27→配管31→MFC検出器28と通流して外部へ排気される。
なお、検出ユニット20は、略直方体形状の上部ブロック20aと下部ブロック20bで形成され、上部ブロック20aには配管29と接続される流路が設けられ、下部ブロック20bには上側の流路と対向するように下側の流路が設けられている。この上部ブロック20aと下部ブロック20bとの間に濾紙40が配置される。
【0028】
上述した流路系において、ポンプ27の下流側にMFC(Mass Flow Calculator(またはController))検出器28が配置され、通流する試料大気ガスの流量を正確に計測して流量信号が出力される。その流量信号はI/Oボード14を介してCPUボード11に入力されている。更に、ポンプ27をバイパスする流路にはバルブが設けられ、このバルブには流量安定用のモータM3が接続されており、CPUボード11からの駆動信号によりモータM3を駆動してバルブを開閉制御する。このような構成により流量を一定量とし、先の数式1における積算吸引流量Vを正確にする。これにより分粒器26は、試料大気を一定流量で吸引することとなる。
【0029】
分粒器(PM10用)26は、例えば試料大気中の粗大粒子の慣性衝突を用いてPM10の分粒を行なうインパクタ方式分粒器であり、試料大気から粗大粒子を取り除き、粒子径が10μm以下(50%カット)の浮遊粒子を透過させた試料大気を得る。
また、PM2.5(粒径2.5μmの浮遊粒子)については、後段にサイクロン方式の分粒器またはインパクタ方式分粒器を設置して、2.5μm以下の微粒子を選択的に分粒しても良い。これらは測定対象に応じて適宜選択される。
【0030】
上述したような浮遊粒子状物質を含む試料大気は、捕集手段を通過する。
捕集手段は、試料大気から浮遊粒子状物質を連続的に捕集する手段である。例えば本形態のように送りリール23、キャプスタン24、巻取リール25、濾紙40、モータM1、モータM2を備える。モータM1、モータM2の駆動信号はパワーI/Oボード15を介してCPUボード11から出力されている。
テープ状の濾紙40は、未使用の濾紙40を供給する送りリール23と、使用済みの濾紙40をロール状に巻回して収容する巻取リール25と、により送り可能になされており、検出ユニット20内に一定長さが供給される。
モータM1は検出ユニット20aの下部ブロック20bを上下動させ、検出ユニット20内に搬送された浮遊粒子状物質捕集用の濾紙40を上下から挟み込むための開閉動作用モータ、モータM2は濾紙40の送り用モータである。この濾紙40は、モータM1により検出ユニット20が開かれた状態で、モータM2により巻取リール25及びキャプスタン24を回転駆動することにより、一定周期(例えば1時間おき)経過後に濾紙40の未使用部分が送りリール23、キャプスタン24を経て検出ユニット20内へ送られるとともに、同じ長さだけ巻取リール25に収容される。
【0031】
検出手段は、捕集手段で捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する手段である。例えば本形態のように、β線源21、半導体検出器22を備える。半導体検出器22の出力信号はアンプボード16内のアンプにより増幅され、I/Oボード14を介してCPUボード11に入力されている。
検出ユニット20の上部ブロック20aにはβ線源21が、下部ブロック20bにはβ線源21と対向するように半導体検出器22が設けられており、先に説明した流路とβ線放射方向が交差するように配置される。この上部ブロック20aと下部ブロック20bとの間を濾紙40が通過する。検出手段の検出原理は先に説明した従来技術と同様にβ線吸収方式を採用しており、重複する説明を省略する。
【0032】
湿度計測手段は、試料大気の湿度を計測して湿度信号を出力する手段であり、検出手段に一体的に配置され、β線強度の検出箇所の湿度を計測する手段である。例えば本形態のように、湿度センサ50である。この湿度センサ50は、検出ユニット20のうち半導体検出器22の近傍に配置される。これにより試料大気の検出時の湿度を一定にして、計測精度を高めている。湿度センサ50の出力信号はI/Oボード14を介してCPUボード11に入力されている。
【0033】
濃度算出手段は検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出する手段であり、また、駆動手段は湿度信号に基づいて目標湿度となるように湿度調整手段を駆動するための駆動信号を出力する手段である。例えば本形態のように、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17を備え、濃度算出手段および駆動手段を共通構成とする。なお、濃度算出・駆動動作については後述する。
【0034】
湿度調整手段は、駆動信号に基づいて試料大気の湿度を調整する手段である。例えば本形態のように、試料大気を加温するヒータユニット32、試料大気を冷却する冷却ユニット33を備える。ヒータユニット32、冷却ユニット33の駆動信号はCPUボード11から出力され、パワーI/Oボード15により電力増幅される。
【0035】
続いて、本形態における湿度調整について図を参照しつつ説明する。図2の特性図は、β線吸収法による検出ユニット(セル)20内の相対湿度(RH)に対するβ線吸収方式分析値と手分析値との誤差を表しており、手分析でのコンディショニング条件である相対湿度50%において、β線吸収方式による浮遊粒子状物質濃度Mと、手分析による浮遊粒子状物質濃度Mとが一致する。そこで、検出ユニット20内のコンディショニング条件を相対湿度50%に維持することで、手分析と同じ値が求められることとなり計測精度を高められる。
【0036】
次に、湿度調整を行う各部の動作について説明する。
ポンプ27の動作により試料大気を分粒器26・配管29を経て検出ユニット20へ導入し、濾紙40の表面で浮遊粒子状物質を捕集しているものとする。このような状況下で試料大気に対して湿度調節動作を行っている。湿度センサ50は、検出ユニット20内の試料大気の湿度を計測して湿度信号を出力している。CPUボード11では図示しないメモリ部に設定湿度50%が記憶されている。
【0037】
湿度センサ50から出力される湿度信号により、相対湿度が50%より高いとCPUボード11は湿度調整手段を駆動する駆動手段としてのパワーI/Oボード15を介して湿度調整手段であるヒータユニット32を加温駆動する。すると試料大気が加温されて温度上昇することにより相対湿度が低くなっていき、試料大気の相対湿度が50%となるように維持される。
一方、湿度センサ50から出力される湿度信号により、相対湿度が50%より低いとCPUボードは湿度調整手段を駆動する駆動手段としてのパワーI/Oボード15を介して湿度調整手段である冷却ユニット33を冷却駆動する。すると試料大気が冷却されて温度降下することにより相対湿度が高くなっていき、試料大気の相対湿度が50%となるように維持される。
これらの試料大気の加温・冷却は、必要時のみ行うこととなる。
【0038】
なお、手分析値と一致させるために設定湿度を50%としているが、湿度は50%に限定する趣旨ではなく異ならせても良い。例えば、海外では上記した手分析のコンディショニング条件が30%〜40%であるため、必要に応じて設定湿度30%〜40%としても良い。これら設定湿度は事情に応じて適宜変更することができる。
【0039】
次に、上記浮遊粒子状物質測定装置により相対湿度を一定に維持した状態において大気中の浮遊粒子状物質濃度を連続測定する動作について説明する。
オペレータが操作パネル12を操作すると、測定を開始する操作信号がCPUボード11へ入力される。CPUボード11は各部へ制御信号を出力する。このとき既に検出ユニット20には濾紙40の未捕集部分が載置され、上部ブロック20aと下部ブロック20bとにより強固に挟持されるともに、β線が漏出しないように密封されるものとする。
まず、ベータ線源21によりβ線を照射する。そして、半導体検出器22からの検出信号が、CPUボード11のメモリ部に一時的に記憶される。一番最初に記憶された検出信号は、β線強度I0となる。
【0040】
続いて、I/Oボード14を介してポンプ27へ駆動信号を出力する。大気中から試料大気が吸引され、試料大気の採取が開始される。この場合、上記したようにMFC検出部28からの流量信号はI/Oボード14を介してCPUボード11に入力されており、所定設定流量を維持するような駆動信号を、I/Oボード14を介してモータM3へ送信する。このため、モータM3によりバルブが開閉制御されて流量が所定設定流量となるように調節される。
【0041】
ポンプ27が所定時間作動して予め決められた流量の試料大気が吸引されると、CPUボード11がポンプ27の稼働を停止し、試料大気の採集は停止される。次に、ベータ線源21によりβ線を再度照射する。そして、半導体検出器22からの検出信号が、CPUボード11のメモリに一時的に記憶され、この検出信号がβ線強度Iとなる。
次いで、メモリに登録されたβ線強度I0 、β線強度Iに加え、前記定数S,k,Vを読み出し、数式1に基づいてβ線吸収方式により浮遊粒子状物質濃度Mを算出する。この浮遊粒子状物質濃度MをCPUボード11が記録計13に記録する。
【0042】
記録終了後、濾紙40を移動させる。まず、CPUボード11はI/Oボード14、パワーI/Oボード15を介してモータM1を駆動し、検出ユニット20の下部ブロック20bを降下させて濾紙40を移動可能な状態とする。続いて、CPUボード11はI/Oボード14、パワーI/Oボード15を介してモータM2を駆動して濾紙40を送り、未使用部分を検出ユニット20に配置する。そして、下部ブロック20bが上昇して最初の状態に戻り、以後、同様の動作を繰り返して自動的に浮遊粒子状物質測定を行うものである。
【0043】
以上、本形態の浮遊粒子状物質測定装置1について説明した。
なお、先に説明した設定湿度は予めCPUボード11のメモリ部に設定登録されているものとして説明したが、例えば、操作パネル12を介してCPUボード11のメモリ部に新たに登録できるようにしても良い。
また、浮遊粒子状物質濃度Mを記録計13に記録するものとして説明したが、さらにI/Oボード14に接続された表示部(図示しない)を搭載し、浮遊粒子状物質濃度Mを表示させても良い。
【0044】
続いて、本発明の他の形態について説明する。図3は本形態の浮遊粒子状物質測定装置(PM10の例)1’の構成図である。なお、先に説明した形態と構成が一部重複するため、相違点のみ重点的に説明する。
浮遊粒子状物質測定装置(PM10の例)1’は、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17、検出ユニット20、β線源21、半導体検出器22、送りリール23、キャプスタン24、巻取リール25、分粒器(PM10用)26、ポンプ27、MFC検出器28、配管29,30,31、濾紙40、湿度センサ50、モータM1,M2,M3を備えている。先に説明した図1の形態におけるヒータユニット32、冷却ユニット33がなく、簡略化された形態である。
これらは、試料大気採取手段、捕集手段、検出手段、湿度計測手段、濃度算出手段、を備える。以下、各手段について説明する。
【0045】
まず、試料大気採取手段は、試料大気を採取する手段であり、分粒器26、配管29、検出ユニット20、濾紙40、配管30、ポンプ27、配管31、MFC検出器28とを備え、先の説明と同様に動作する。
捕集手段は、試料大気から浮遊粒子状物質を連続的に捕集する手段であり、送りリール23、キャプスタン24、巻取リール25、濾紙40、モータM1、モータM2を備え、先の説明と同様に動作する。
【0046】
湿度計測手段は、試料大気の湿度を計測して湿度信号を出力する手段であり、例えば湿度センサ50により構成されていて先の説明と同様に動作する。
濃度算出手段は検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出するとともに、湿度信号に基づいて設定湿度における浮遊粒子状物質濃度となるように演算処理によって補正を行う手段である。例えば本形態のように、CPUボード11、操作パネル12、記録計13、I/Oボード14、パワーI/Oボード15、アンプボード16、外部入出力端子17を備える。
【0047】
続いて湿度補正機能について説明する。先の図2で示したように、検出ユニット20内の相対湿度とβ線吸収方式値/手分析値との関係を数式で表すと、以下のようになる。
【0048】
【数2】
【0049】
ここでFRMは手分析相当値、aは傾き、RHは測定された検出ユニット内の湿度、bは切片、Mはβ線吸収方式により求めた濃度である。本形態では、測定により求めたβ線吸収方式値の浮遊粒子状物質濃度Mを、上記数式2を用いて、相対湿度50%相当である手分析値による浮遊粒子状物質濃度FRMに補正するものである。このような補正により、相対湿度の影響を排除して手分析と同等の浮遊粒子状物質濃度を求め、計測精度を高めている。
なお、上記a,bは図2のグラフから例えば最小自乗法等により算出されるものであり、本形態ではa=0.023,b=0.1872という値となった。なお、当然ながら、これら値は実際の装置では設計変更等の各種要因により変化するが、その場合でも実験的に算出できることはいうまでもない。実験により相対湿度と、浮遊粒子状物質濃度のβ線吸収方式値/手分析値とを算出していき、最小自乗法等により係数a,bを割り出せば良い。
【0050】
次に、各部の動作について説明する。
まず、前述した方法によりβ線強度I0,β線強度I,m,S,Vを取得する。そして、CPUボード11は前記数式1に基づいてβ線吸収方式により浮遊粒子状物質濃度Mを算出し、この浮遊粒子状物質濃度Mを先に掲げた数式2により手分析相当値の浮遊粒子状物質濃度FRMに補正する。そしてCPUボード11は、この浮遊粒子状物質濃度FRMを記録計13により記録させる。その他の動作は、先に説明した浮遊粒子状物質測定装置1がヒータユニット32や冷却ユニット33を用いて湿度調整する点を除けば、浮遊粒子状物質測定装置1と同様である。
【0051】
以上、本発明の浮遊粒子状物質測定装置について説明した。
これらの浮遊粒子状物質測定装置(PM10の例)1,1’によれば、相対湿度の影響を排除し、β線吸収方式で測定する浮遊粒子状物質濃度を標準測定法による手分析値と一致させることができる。
また、本発明においては、従来の浮遊粒子状物質測定装置に湿度センサやヒータユニット、冷却ユニットを付加し、その制御プログラムを追加したり、数式2による補正演算用の簡単なプログラムを追加するだけで実現可能であり、比較的低コストにて提供することが可能である。
なお、前記湿度計測手段としての湿度センサ50に代えて、検出ユニット20内に温度センサを設置して検出ユニット20内の温度を計測することにより、そこから検出ユニット20内のその温度での飽和水蒸気圧を計算により求め、更に試料大気を採取する手段としての分粒器26近傍に温度センサ及び湿度センサを設置して試料大気自体の温度、相対湿度を計測するとそこから試料大気自体のその温度での水蒸気圧がわかり、そこから更に試料大気自体の飽和水蒸気圧を計算することにより、前記試料大気自体の飽和水蒸気圧と前記検出ユニット20内の飽和水蒸気圧との比から検出ユニット20内の相対湿度を求めることができる。この相対湿度の値を湿度信号として出力することによって本発明を実施することも可能である。
【図面の簡単な説明】
【0052】
【図1】本発明の実施するための最良の形態の浮遊粒子状物質測定装置の構成図である。
【図2】相対湿度によるβ線吸収方式分析値と手分析値との誤差を説明する特性図である。
【図3】本発明の実施形態を示す概略的な全体構成図である。
【図4】従来技術の浮遊粒子状物質測定装置の要部説明図である。
【符号の説明】
【0053】
1,1’:浮遊粒子状物質測定装置(PM10の例)
11:CPUボード
12:操作パネル
13:記録計
14:I/Oボード
15:パワーI/Oボード
16:アンプボード
17:外部入出力端子
20:検出ユニット
21:β線源
22:半導体検出器
23:送りリール
24:キャプスタン
25:巻取リール
26:分粒器(PM10用)
27:ポンプ
28:MFC検出器
29:配管
30:配管
31:配管
32:ヒータユニット
33:冷却ユニット
40:濾紙
50:湿度センサ
M1,M2,M3:モータ
【特許請求の範囲】
【請求項1】
粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、
試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、
捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、
試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、
試料大気の湿度を調整する湿度調整手段と、
検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出する濃度算出手段と、
湿度計測手段からの湿度信号に基づいて試料大気が設定湿度となるように湿度調整手段を駆動する駆動手段と、
を備え、
濃度算出手段が、設定湿度の試料大気から浮遊粒子状物質濃度を測定することを特徴とする浮遊粒子状物質測定装置。
【請求項2】
請求項1に記載の浮遊粒子状物質測定装置において、
前記湿度調整手段は、試料大気を加温または冷却することにより湿度を調整する手段であることを特徴とする浮遊粒子状物質測定装置。
【請求項3】
粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、
試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、
捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、
試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、
検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出するとともに、湿度計測手段からの湿度信号に基づいて設定湿度における浮遊粒子状物質濃度となるように、算出した浮遊粒子状物質濃度を補正する濃度算出手段と、
を備えたことを特徴とする浮遊粒子状物質測定装置。
【請求項4】
請求項1〜請求項3の何れか一項に記載の浮遊粒子状物質測定装置において、
前記湿度計測手段は、検出手段に一体的に配置され、β線強度の検出箇所における試料大気の湿度を計測する手段であることを特徴とする浮遊粒子状物質測定装置。
【請求項1】
粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、
試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、
捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、
試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、
試料大気の湿度を調整する湿度調整手段と、
検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出する濃度算出手段と、
湿度計測手段からの湿度信号に基づいて試料大気が設定湿度となるように湿度調整手段を駆動する駆動手段と、
を備え、
濃度算出手段が、設定湿度の試料大気から浮遊粒子状物質濃度を測定することを特徴とする浮遊粒子状物質測定装置。
【請求項2】
請求項1に記載の浮遊粒子状物質測定装置において、
前記湿度調整手段は、試料大気を加温または冷却することにより湿度を調整する手段であることを特徴とする浮遊粒子状物質測定装置。
【請求項3】
粒子径が所定粒径以下である浮遊粒子状物質を含む試料大気を採取する試料大気採取手段と、
試料大気から浮遊粒子状物質を連続的に捕集する捕集手段と、
捕集手段により捕集された浮遊粒子状物質にβ線を照射し、透過したβ線強度についての検出信号を出力する検出手段と、
試料大気の湿度を計測して湿度信号を出力する湿度計測手段と、
検出手段からの検出信号に基づいてβ線吸収方式により浮遊粒子状物質濃度を算出するとともに、湿度計測手段からの湿度信号に基づいて設定湿度における浮遊粒子状物質濃度となるように、算出した浮遊粒子状物質濃度を補正する濃度算出手段と、
を備えたことを特徴とする浮遊粒子状物質測定装置。
【請求項4】
請求項1〜請求項3の何れか一項に記載の浮遊粒子状物質測定装置において、
前記湿度計測手段は、検出手段に一体的に配置され、β線強度の検出箇所における試料大気の湿度を計測する手段であることを特徴とする浮遊粒子状物質測定装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−3090(P2006−3090A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−176508(P2004−176508)
【出願日】平成16年6月15日(2004.6.15)
【出願人】(000219451)東亜ディーケーケー株式会社 (204)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月15日(2004.6.15)
【出願人】(000219451)東亜ディーケーケー株式会社 (204)
【Fターム(参考)】
[ Back to top ]