
浮遊菌捕集装置、浮遊菌計測方法及び浮遊菌計測システム
【課題】捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することを可能とする浮遊菌捕集装置、これを用いた浮遊菌計測方法及び浮遊菌計測システムを提供する。
【解決手段】ノズル16は等間隔に配列された複数のピンホール16aで構成されている。駆動機構22は、ピンホール16a同士のピッチ間隔をdとしたときに、捕集担体30を支持する支持容器20が、直径d未満の円を描くように支持容器20を水平方向に移動させる。
【解決手段】ノズル16は等間隔に配列された複数のピンホール16aで構成されている。駆動機構22は、ピンホール16a同士のピッチ間隔をdとしたときに、捕集担体30を支持する支持容器20が、直径d未満の円を描くように支持容器20を水平方向に移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、浮遊菌捕集装置、浮遊菌計測方法及び浮遊菌計測システムに関し、特に、空気中に浮遊する浮遊菌を長時間連続して捕集し空気中の生菌数を計測するために用いる浮遊菌捕集装置、浮遊菌計測方法及び浮遊菌計測システムに関する。
【背景技術】
【0002】
従来、医薬品製造分野、病院・手術室、食品工業分野等における浮遊微生物(浮遊菌)の計測技術として、試料に光を照射して試料中の粒子から発せられる散乱光を検出するパーティクルカウンタ(粒子計測装置)を用いる光散乱法、寒天平板培地上に室内空気を吹き付けて恒温器等で当該培地上の微生物を2〜3日培養し、培養後のコロニー数を計測する培養法等が一般的に多く使用されている。
【0003】
しかし、パーティクルカウンタを用いる光散乱法は、その機能上リアルタイムに計測可能であるが、生物由来の微粒子以外にも非生物由来の塵埃等も同時に計測してしまい、室内の生菌数を正確に特定することは不可能であった。
【0004】
また、培養法では、恒温器等で2〜3日培養し培養後のコロニー数を計測するため、生菌検出までに時間がかかるとともに、培養できない菌(培養不能菌)、損傷等を受けた場合や環境状態が悪いために増殖できない状態になっている菌(芽胞状態の菌)、すなわちVNC(Viable but Non- Culturable)菌は計測できないという問題があった。
【0005】
最近では、蛍光分光法による微生物測定とMIE散乱理論に基づくパーティクル測定法を組み合わせた計測装置が開発されている。しかしながら、蛍光分光法は生物由来のNADH(ニコチン酸アミドアデニンジヌクレオチド)を検出するものであるため、生菌と死菌を同時に検出してしまい、生菌と死菌の区別ができないという問題がある。その結果、無菌環境を保証するアイソレータ等の室内において本装置で浮遊菌を検出(カウント)した場合、室内での作業を中断しアイソレータ等を分解、滅菌する必要が生じるが、計測されたものが死菌であった場合には、前記の分解、滅菌作業が無駄なものとなり、作業効率の低下に繋がる。
【0006】
また、浮遊菌の捕集方法として、インパクタの原理を利用した衝突捕集方式が存在する。衝突捕集方式は、ノズルを形成するスリットやピンホールを通過させた空気を捕集担体に高速衝突させることにより、担体表面に浮遊菌を捕捉する方法であり、特許文献1や特許文献2に示すように、ノズル径、ノズルと捕集面とのギャップ、ノズルピッチ等を最適化することにより捕集効率を高める方法や、特許文献3に示すように捕集担体を載せた容器を回転及び上下動させることにより捕集担体上に均一に浮遊菌を捕捉する方法などが提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第642687号公報
【特許文献2】特開2001−169770号公報
【特許文献3】特開平09−215491号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述の衝突捕集方式によって捕集した浮遊菌は一般に培養法により計数されることを想定しているために、捕集担体は浮遊菌の生育に必要な栄養分を含む寒天培地で形成されている。寒天培地上に捕集して判別可能な菌数に限界があること、また捕集動作中に寒天培地が乾燥し、捕集効率が低下することから、一枚の培地で連続捕集できる時間は限られている。更に、特許文献3のように、培地を載せたシャーレの中心を回転軸として回転させたとしても、ノズルの直下となる培地、すなわちシャーレの中心からノズル直下までの距離を半径とする円周上の培地が次第に風圧によって凹んでいき、これによりノズルと捕集面との間のギャップ長が次第に長くなっていくため、長時間捕集を続けた場合は補集効率が低下する。したがって、浮遊菌を連続的に捕集するには、数分毎に培地を交換しなければならず、捕集時間に応じて培地の交換回数が増加し、培養検体数が増大していく。
【0009】
本発明は、このような事情に鑑みてなされたものであり、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することを可能とする浮遊菌捕集装置、これを用いた浮遊菌計測方法及び浮遊菌計測システムを提供することを目的とする。
また、生菌のみを迅速かつ的確に計測することができる浮遊菌計測方法及び浮遊菌計測システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係る浮遊菌捕集装置は、空気を通過させるノズルと、該ノズルの下流に設けられ該ノズルを通過した空気中の浮遊菌を捕集する捕集担体と、該捕集担体を支持する支持容器とを備えた浮遊菌捕集装置であって、前記ノズルを通過した空気が衝突する前記捕集担体上の領域の中心点の描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えたことを特徴とする。
【0011】
上記構成によれば、浮遊菌捕集装置は、ノズルを通過した空気が衝突する捕集担体上の領域の中心点が描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えているため、捕集担体の特定の部分のみが風圧や乾燥によって凹むことを防ぐことができる。したがって、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することが可能となる。
【0012】
また、上記構成に加えて、前記ノズルは、等間隔に配列された複数のピンホールで構成され、前記駆動機構は、前記ピンホール同士のピッチ間隔をdとしたときに、前記支持容器が直径d未満の円を描くように前記支持容器を水平方向に移動させることを特徴とする。
【0013】
このような構成とすれば、捕集担体表面の特定の部分に空気の衝突を集中させずに捕集担体表面のほぼ全体に衝突するようにできるため、捕集担体表面のほぼ全体を捕集面として用いることができる。したがって、乾燥及び風圧による凹みを防ぐことができ、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することが可能となる。
【0014】
また、上記構成に加えて、前記駆動機構は、前記支持容器を鉛直方向に上昇させることを特徴とする。
このように構成することで、ファンにより引き起こされた空気流により空気がノズルを通過し捕集担体に衝突して、空気に含まれる浮遊菌が担体表面に捕捉される捕集動作中に、ノズル直下の捕集担体が乾燥または風圧によって凹むことがあっても、支持容器が上昇することで、ノズルと担体の捕集面とのギャップ長が維持されるため、高い捕集効率を保つことができる。
【0015】
また、本発明に係る浮遊菌計測方法は、捕集担体に空気を衝突させて空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする。
【0016】
上記構成によれば、浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により空気中に浮遊する粒子が検出された時点で浮遊菌捕集装置に搭載されている捕集担体を分析の対象とすることで、粒子計測装置により粒子が検出されなかった時間帯に浮遊菌捕集装置に搭載されていた捕集担体を分析対象から除くことができ、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを的確に早く計測することができる。
【0017】
また、本発明に係る浮遊菌計測方法は、空気が衝突する捕集担体上の領域の中心点の描く軌跡が交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ空気流中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする。
【0018】
上記構成によれば、浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により空気中に浮遊する粒子が検出された時点で浮遊菌捕集装置に搭載されている捕集担体を分析の対象とすることで、粒子計測装置により粒子が検出されなかった時間帯に浮遊菌捕集装置に搭載されていた捕集担体を分析対象から除くことができ、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを的確に早く計測することができる。また、捕集担体を支持する支持容器を水平方向に移動させることで、捕集担体の交換までの時間を長くすることができるため、分析すべき捕集担体を特定するのが容易となる。
【0019】
上記構成において、前記粒子計測装置の計測動作中に前記浮遊菌捕集装置が前記捕集を開始した場合、前記浮遊菌捕集装置が開始信号を前記粒子計測装置に送信する開始信号送信ステップと、前記開始信号が送信された時点からの経過時間に対応付けて、前記粒子計測装置が計測状況を記録するとともに前記浮遊菌捕集装置が捕集状況を記録する記録ステップとを備えることを特徴とする。
【0020】
上記構成によれば、開始信号が送信された時点からの経過時間に対応付けて、前記粒子計測装置が計測状況を記録するとともに前記浮遊菌捕集装置が捕集状況を記録するため、粒子計測装置の計測状況と浮遊菌捕集装置の捕集状況との時系列関係を明らかにすることができ、粒子計測装置で粒子を検出した時点において浮遊菌捕集装置に搭載されていた捕集担体を把握することが可能となるため、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを迅速かつ的確に計測することができる。
【0021】
上記構成に加えて、前記記録ステップにおいて、前記粒子計測装置は計測した粒子の数を前記経過時間に対応付けて記録し、前記浮遊菌捕集装置は前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする。
【0022】
上記構成によれば、粒子計測装置及び浮遊菌捕集装置により記録された内容を経過時間に基づいて照合することで、粒子計測装置が粒子を検出した時点において浮遊菌捕集装置に搭載されていた捕集担体を把握することができるため、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを迅速かつ的確に計測することができる。
【0023】
上記構成において、前記粒子計測装置が空気中に浮遊する粒子を検出した場合に、アラームを出力することを特徴とする。
上記構成によれば、作業員はアラームの出力により空気中に粒子が浮遊していることを認識し、アラームが出力された時に浮遊菌捕集装置に搭載されていた捕集担体を分析することができるため、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを迅速かつ的確に計測することができる。
【0024】
また、本発明に係る浮遊菌計測方法は、空気が衝突する捕集担体上の領域の中心点の描く軌跡が交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ空気中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置が前記空気中に浮遊する粒子を閾値以上検出した時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始信号送信ステップと、前記浮遊菌捕集装置が前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始ステップと、前記捕集が開始されてから予め設定された時間が経過した場合に、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する生菌計測ステップとを備えたことを特徴とする。
【0025】
本発明によれば、粒子計測装置が粒子を検出してから浮遊菌捕集装置が捕集を開始することで、無駄な捕集や分析の手間を省くことができ、生菌のみを迅速かつ的確に計測することができる。
【0026】
また、本発明に係る浮遊菌計測システムは、請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、前記粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする。
【0027】
上記構成において、前記浮遊菌捕集装置は、空気中の浮遊菌の捕集を開始した時に、開始信号を前記粒子計測装置に送信する開始信号送信手段と、前記開始信号が送信された時点からの経過時間に対応付けて捕集状況を記録する捕集状況記録手段とを備え、前記粒子計測装置は、前記開始信号を受信した時点からの経過時間に対応付けて計測状況を記録する計測状況記録手段を備えることを特徴とする。
【0028】
上記構成において、前記計測状況記録手段は、計測した粒子数を前記経過時間に対応付けて記録し、前記捕集状況記録手段は、前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする。
上記構成において、前記粒子計測装置は、空気中に浮遊する粒子を検出した時にアラームを出力するアラーム出力手段を備えることを特徴とする。
【0029】
また、本発明に係る浮遊菌計測システムは、請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、前記粒子計測装置は、前記空気中に浮遊する粒子が閾値以上検出された時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始指示信号送信手段を備え、前記浮遊菌捕集装置は、前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始手段と、前記捕集開始手段により捕集が開始されてから予め設定された時間が経過するまで前記捕集を継続する捕集継続手段とを備えたことを特徴とする。
【発明の効果】
【0030】
本発明によれば、浮遊菌捕集装置は、ノズルを通過した空気が衝突する捕集担体上の領域の中心点が描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えているため、捕集担体の特定の部分のみが風圧や乾燥によって凹むことを防ぐことができる。したがって、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することが可能となる。
【0031】
また、浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により空気中に浮遊する粒子が検出された時点で浮遊菌捕集装置に搭載されている捕集担体を分析の対象とすることで、粒子計測装置により粒子が検出されなかった時間帯に浮遊菌捕集装置に搭載されていた捕集担体を分析対象から除くことができ、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを的確に早く計測することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の第1実施形態に係る浮遊菌計測システムの全体構成を示すブロック図である。
【図2】同実施形態に係る浮遊菌捕集装置の縦断面を摸式的に示す図である。
【図3】同実施形態に係る浮遊菌捕集装置の上蓋の平面図である。
【図4】同実施形態に係る上蓋に設けられたノズル部分の拡大図である。
【図5】同実施形態に係る浮遊菌捕集装置においてノズル及び捕集担体が設置されている部分の縦断面を摸式的に示す図である。
【図6】同実施形態に係るピンホールの位置座標を当該ピンホール直下の捕集担体上に投影した点が、駆動機構による支持容器の水平方向の移動により、捕集担体上に描く軌跡の一例を摸式的に示す図である。
【図7】同実施形態に係る粒子計測装置の機能構成を示すブロック図である。
【図8】同実施形態に係る菌体分析装置の機能構成を示すブロック図である。
【図9】同実施形態に係る浮遊菌計測方法の手順を示す図である。
【図10】同実施形態に係るATP法による生菌数計測の手順を示すフローチャートである。
【図11】本発明の第2実施形態に係る浮遊菌捕集装置の機能構成を示すブロック図である。
【図12】同実施形態に係る粒子計測装置の機能構成を示すブロック図である。
【図13】(a)は、同実施形態に係る浮遊菌捕集装置の捕集状況記録部によって記録される捕集状況の一例を示す図であり、(b)は同実施形態に係る粒子計測装置の計測状況記録部によって記録される計測状況の一例を示す図である。
【図14】同実施形態に係る浮遊菌計測方法の手順を示す図である。
【図15】本発明の第3実施形態に係る粒子計測装置の機能構成を示すブロック図である。
【図16】同実施形態に係る浮遊菌捕集装置の機能構成を示すブロック図である。
【図17】同実施形態に係る浮遊菌計測方法の手順を示す図である。
【図18】(A)は、本発明の第4実施形態に係る浮遊菌捕集装置の上部の横断面、(B)は同実施形態に係る浮遊菌捕集装置の縦断面を摸式的に示す図である。
【発明を実施するための形態】
【0033】
以下、添付図面を参照して、本発明の実施形態について説明する。
(第1実施形態)
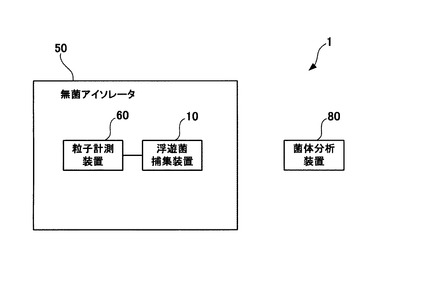
まず、本発明の第1実施形態について説明する。図1は、本発明の第1実施形態に係る浮遊菌計測システム1の全体構成を示すブロック図である。同図に示すように、浮遊菌計測システム1は、無菌アイソレータ50内に設置された浮遊菌捕集装置10及び粒子計測装置60と、無菌アイソレータ50の外に設置された菌体分析装置80とで構成され、浮遊菌捕集装置10と粒子計測装置60とは近接して有線又は無線で通信可能に接続されている。
【0034】
無菌アイソレータ50は、無菌状態が保たれるように密閉された部屋(空間)であり、分解したり組み立て(立ち上げ)たりすることが可能である。本実施形態では、無菌アイソレータ50内で医薬品等が製造される。
【0035】
(浮遊菌捕集装置の構成)
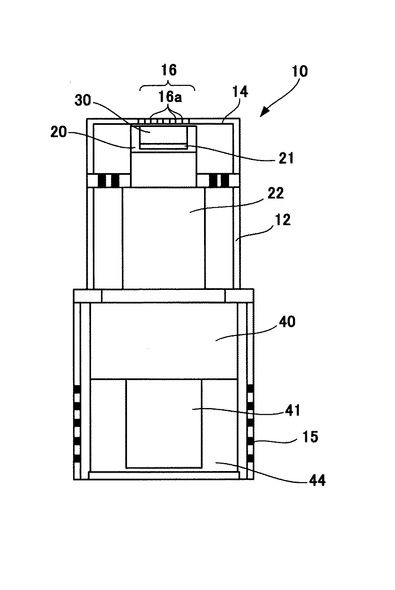
図2は、浮遊菌捕集装置10の縦断面を摸式的に示す図である。同図に示すように、浮遊菌捕集装置10には、中空状の円筒形の外壁を形成するケーシング12が設けられている。ケーシング12の天井面には円形の開口部が形成され、その開口部は着脱可能な上蓋14で覆われている。その上蓋14には、空気を通過させるノズル16が設けられている。ノズル16の下方には、空気中の浮遊菌を捕集する捕集担体30が配置されている。捕集担体30は、円柱形の支持容器20に無菌的に充填されている。
【0036】
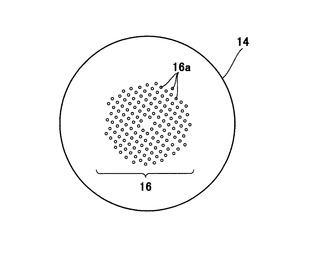
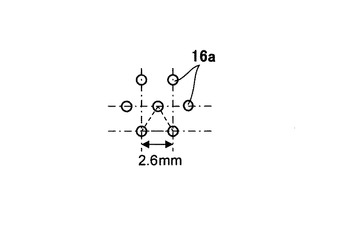
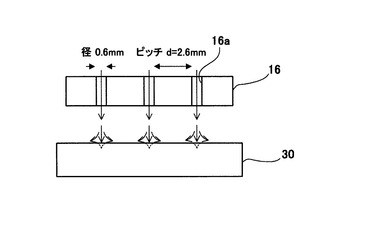
図3は上蓋14の平面図、図4は上蓋14に設けられたノズル16部分の拡大図、図5は浮遊菌捕集装置10においてノズル16及び捕集担体30が設置されている部分の縦断面を摸式的に示す図である。これらの図に示すように、ノズル16は、等間隔に配列された複数のピンホール16aで構成される。ピンホール16aの径は例えば0.6mmとし、ピンホール16a同士のピッチ間隔dは2.6mmとすることができる。ファン40により吸引された空気は、これらの複数のピンホール16aを通過して捕集担体30へ衝突させられることとなる。
【0037】
捕集担体30は、ノズル16から吸引される空気流に対して直交するように、水平に配置される。したがって、ノズル16から吸引された空気は、捕集担体30に衝突して水平方向に流れを変え、その際に空気中の浮遊菌が捕集担体30の表面に捕捉される。
【0038】
ケーシング12の内部空間の下部には、ノズル16からケーシング12内部への空気流を生成するファン40及び当該ファン40を駆動するためのファン駆動モータ41が設けられている。更にその下流には、排気する空気を清浄化する濾材44が設けられている。
【0039】
捕集担体30が充填された支持容器20とケーシング12の内壁との間には隙間が形成されており、ケーシング12の側面下部には排気口15が形成されている。したがって、捕集担体30に衝突して水平方向に流れた空気は、その隙間を通って下方に流れ、排気口15から排出される。
【0040】
捕集担体30としては、捕集動作時にゲル状であり、所定の温度(例えば40℃以下)に加温することによってゾルに転移するゲル−ゾル転移性の高分子の水溶性樹脂が使用される。捕集担体30は、特に相転移温度が15〜40℃であり、25℃で適度な強度のゲル状であるものが好ましい。この温度範囲で相転移させることによって、捕集した生菌の死滅を回避できる。また、空気の衝突による乾燥を防ぐために、捕集担体30は耐乾燥性であることが好ましい。また、高分子としては、ゼラチン及びグリセロールを含むものが好ましい。捕集時間から必要とされる耐乾燥性能と相転移温度に応じて、ゼラチン濃度は重量比で5〜50%、グリセロール濃度は10〜40%の間で調節する。
【0041】
支持容器20は浮遊菌捕集装置10から着脱可能である。支持容器20の底面には、ゾル化した捕集担体30を排出するための不図示の穴が設けられており、その上には捕集担体30を濾過除去するとともに、捕集担体30により捕集された浮遊菌を捕捉するフィルタ21が設けられている。フィルタ21は、孔径が0.45mm程度のものが使用される。
【0042】
支持容器20の下方には、これを水平方向及び垂直方向に移動させる駆動機構22が設けられている。駆動機構22は、ファン40が駆動される捕集動作中に、支持容器20を水平方向及び鉛直上昇方向に移動させる。駆動機構22は、不図示のモータを駆動源とし、水平方向の移動と鉛直方向の移動を行わせる2系統の不図示のギヤ列が設けられている。水平方向のギヤ列としては、例えば、支持容器20の下方に内歯車を取り付け、当該内歯車が当該内歯車よりも外周が大きい外歯車と噛み合うようにするとよい。或いは、支持容器20の底面に複数の偏心アームを取り付けるようにしてもよい。また、鉛直方向のギヤ列としては、支持容器20の下方にラックギヤを取り付け、当該ラックギヤがピニオンギヤと噛み合うようにすればよい。
【0043】
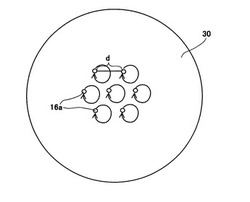
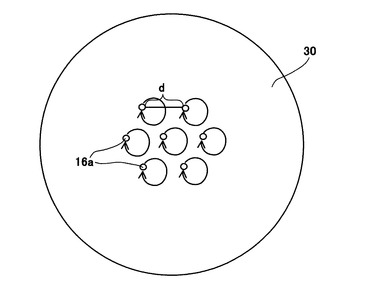
ピンホール16aを通過した空気が捕集担体30上に衝突する場合に、図5に示すように、ピンホール16aの直下の捕集担体30上に、空気が衝突する領域Rができるが、駆動機構22は、その領域Rの中心点(すなわち、ピンホール16aの位置座標を当該ピンホール16a直下の捕集担体30上に投影した点)の描く軌跡が交わらないように、支持容器20を水平方向に移動させる。図6は、ピンホール16aの位置座標を当該ピンホール16a直下の捕集担体30上に投影した点が、駆動機構22による支持容器20の水平方向への移動によって、捕集担体30上に描く軌跡の一例を摸式的に示す図である。同図に示すように、ピンホール16a同士のピッチ間隔をdとしたときに、駆動機構22は支持容器20が直径d未満の円を描くように、支持容器20を水平方向に移動させる。これにより、捕集担体30の表面のピンホール16a直下となる部分が更新されていくため、捕集担体30の特定の部分に空気が衝突するのを防ぎ、捕集担体30の表面全体を捕集面とすることができる。
【0044】
なお、支持容器20の水平方向の動きは円運動に限定されることはなく、ピンホール16aを通過した空気が衝突する捕集担体30上の領域の中心点の描く軌跡が交わらないように調整できればよい。例えば、支持容器20を楕円や多角形、或いは、Z、S、M等の文字を描くように移動させてもよい。
【0045】
垂直上昇方向の移動速度は、乾燥及び風圧による捕集担体30の凹み速度に応じて設定する。160m3/minの速度で空気を吸引する場合の垂直上昇方向の移動速度は、1mm/hr程度が好ましい。水平方向の移動速度は0.5〜1rpm程度が好ましい。
【0046】
なお、浮遊菌捕集装置10には、図示せぬ、浮遊菌捕集装置10に電力を供給するための電源、捕集動作開始の指令を与えるためのスイッチ、捕集担体30の交換時に作業者が押下するボタンが設けられており、また、これらや駆動機構22、ファン駆動モータ41等を制御するためのCPU(Central Processing Unit)、時間を計時するタイマー、各種データやプログラムを記憶するためのメモリ、記録したデータを出力するためのディスプレイ、印刷装置等が設けられている。
【0047】
上記の如く構成された浮遊菌捕集装置10は、捕集担体30を支持容器20によってノズル16の下方にセットし、ファン駆動モータ41によりファン40を駆動することによって空気をケーシング12内に吸引する。これにより、ノズル16から空気が鉛直下方に吸引され、この空気が捕集担体30に衝突して水平方向に流れを変えるとともに、空気中の浮遊菌がゲル状の捕集担体30に捕捉される。この捕集動作中は、支持容器20の水平移動により、ノズル16直下の捕集面が更新されるとともに、垂直上昇移動により、ノズル16と捕集面のギャップ長が維持される。
【0048】
(粒子計測装置の構成)
粒子計測装置60は、空気中に浮遊する粒子(あらゆる粒子を含む、以下「塵埃」という)の数を計測する一般的なパーティクルカウンタであり、空気に光を照射して空気中の塵埃によって散乱される散乱光を計測することにより、空気中の粒子数をリアルタイムで連続的に計数(カウント)し、計数結果を図示せぬメモリに記録したりディスプレイに表示したり印刷したりする。また、粒子計測装置60は、計測動作を開始させるための図示せぬスイッチを備えている。
【0049】
本実施形態に特徴的な機能として、粒子計測装置60は、図7に示すようにアラーム出力部61を備えている。
アラーム出力部61は、CPUとプログラムと音源データを含んで構成され、塵埃を1つ以上カウントした場合(すなわち塵埃を検出した場合)にアラームを出力する。
【0050】
(菌体分析装置の構成)
菌体分析装置80は、捕集担体30により捕集された菌体をATP(アデノリン−3−リン酸:Adenosine TriPhosphate)法により分析する装置である。ATP法とは、生菌が必ず含有する化学物質であるATPを菌数の指標とし、生物由来の酵素であるルシフェラーゼとその基質タンパク質であるルシフェリンによる生物発光を利用する方法である。具体的には、試料から生菌のATPを抽出し、これに発光剤(ルシフェリン−ルシフェラーゼ混合液)を添加して発光させることによって、発光強度からATP量を求め、当該ATP量を生菌数に換算する方法である。このATP法によれば、数分〜数十分程度で生菌数を求めることが可能である。
【0051】
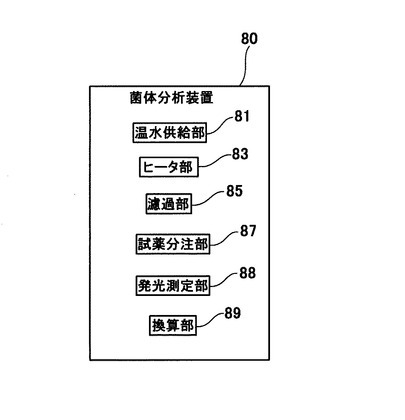
図8は、菌体分析装置80の機能構成を示すブロック図である。同図に示すように、菌体分析装置80は、温水供給部81と、ヒータ部83と、濾過部85と、試薬分注部87と、発光測定部88と、換算部89とを備えている。
【0052】
温水供給部81は、不図示のポンプ、ヒータ、ノズル等から構成され、捕集担体30を希釈するための温水を供給する。当該温水は滅菌溶液が好ましく、その好ましい組成としては、リン酸バッファーや生理食塩水などが挙げられる。捕集担体30に含まれるゼラチン及びグリセロールの濃度が低いと十分な強度のゲルが得られず、濃度が高いと相転移したゾルの粘性が高くなって濾過が困難になる。そのため、高分子濃度が高い捕集担体30を用いる場合には、ゾル化後に希釈液によってゼラチン濃度は10%以下、グリセロール濃度は25%以下になるまで希釈してから濾過処理することが好ましい。
【0053】
ヒータ部83は、ゲル状態の捕集担体30を加熱することにより、ゾルに転移させる。
濾過部85は、吸引ポンプを含んで構成され、ゾル化した捕集担体30を濾過し、捕集担体30により捕集された菌(生菌及び遊離ATP)をフィルタ21上に残留させる。
【0054】
試薬分注部87は、ノズル、アクチュエータ等から構成され、フィルタ21上に残留した菌に、遊離ATPを除去するATP消去剤や、生菌のATPを抽出するATP抽出剤を分注する。
発光測定部88は、PMT(Photomultiplier Tube:光電子倍増管)を含んで構成され、光子の数を計数することにより発光量を測定する。
【0055】
換算部89は、CPUがプログラムを実行することによって実現される機能であり、発光測定部88が計測した発光量をATP量に換算し、当該ATP量を生菌の数に換算する。
【0056】
(浮遊菌計測方法)
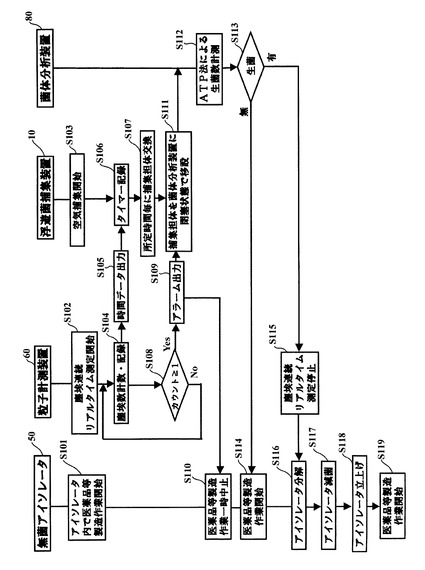
次に、図9を参照して、本実施形態に係る浮遊菌計測システムにおいて行われる浮遊菌計測方法について説明する。ここでは、浮遊菌捕集装置10のタイマーは例えば1時間に設定されているものとする。
医薬品等製造作業員は、無菌アイソレータ50内での医薬品等の製造作業を開始する(ステップS101)。
【0057】
浮遊菌計測作業員は、粒子計測装置60の計測動作を開始するためのスイッチを入れる。これにより、粒子計測装置60は、無菌アイソレータ50内の塵埃の連続リアルタイム測定を開始する(ステップS102)。さらに、浮遊菌計測作業員は、捕集担体30が充填された支持容器20を浮遊菌捕集装置10にセットし、捕集動作を開始するためのスイッチを入れる。これによりタイマーによる計時が開始されるとともに、ファン駆動モータ41によりファン40が駆動され、無菌アイソレータ50内の空気が捕集担体30に衝突して、浮遊菌の捕集動作が開始される。また、捕集動作中は、駆動機構22の駆動により支持容器20が水平移動及び垂直移動する(ステップS103)。
【0058】
粒子計測装置60は、無菌アイソレータ50内の塵埃数を計数してメモリに記録し(ステップS104)、記録した内容及びその時の時刻を示す時間データを浮遊菌捕集装置10に出力する(ステップS105)。
【0059】
浮遊菌捕集装置10は、粒子計測装置60から時間データを受信すると、当該時間データをタイマーで計時中の時間と対応付けてメモリに記録する(ステップS106)。
【0060】
浮遊菌捕集装置10で計時されるタイマーが満了する毎に、浮遊菌計測作業員は、浮遊菌捕集装置10の捕集担体30を支持容器20とともに交換する(ステップS107)。浮遊菌計測作業員は、何回目に交換したものかがわかるように、浮遊菌捕集装置10から取り外した捕集担体30を管理する。
【0061】
ステップS104で計数された塵埃の数がゼロの場合(ステップS108:No)、粒子計測装置60は無菌アイソレータ50内の塵埃測定動作を継続する(ステップS104)。一方、計数された塵埃の数が1以上の場合(ステップS108:Yes)、粒子計測装置60のアラーム出力部61はアラームを出力する(ステップS109)。これにより、無菌アイソレータ50内での医薬品等製造作業を一時中止する(ステップS110)。
【0062】
浮遊菌計測作業員は、アラームが出力された時点で、又はそれから所定時間が経過した後、浮遊菌捕集装置10に搭載されていた捕集担体30を、支持容器20とともに取り外し、閉塞状態で菌体分析装置80に移設する(ステップS111)。なお、浮遊菌計測作業員がその場に不在であった等で、粒子計測装置60からアラームが出力された時点で浮遊菌捕集装置10に搭載されていた捕集担体30をリアルタイムに把握できなった場合には、浮遊菌計測作業員は、浮遊菌捕集装置10により記録されている粒子計測装置60からの時間データに基づいて、塵埃が計測された時点で浮遊菌捕集装置10に搭載されていた捕集担体30を判別する。
【0063】
菌体分析装置80は、浮遊菌捕集装置10から移設された捕集担体30中の生菌数をATP法により計測する(ステップS112)。計測した結果、生菌が存在しなかった場合は(ステップS113:無)、無菌アイソレータ50内で中断していた医薬品等製造作業を開始する(ステップS114)。一方、生菌が存在した場合には、粒子計測装置60による塵埃連続リアルタイム測定を停止する(ステップS115)。そして、無菌アイソレータ50を分解し(ステップS116)、紫外線やオゾンガス等で無菌アイソレータ50を滅菌した後(ステップS117)、無菌アイソレータ50を再度立ち上げる(ステップS118)。そして、無菌アイソレータ50内での医薬品等製造作業を再開する(ステップS119)。
【0064】
なお、上述した実施形態では、粒子計測装置60は塵埃を1個以上カウントした場合にアラームを出力したが、これに限らず、アラームを出力する条件に塵埃の粒径の条件を加えてもよい。例えば、粒径0.5μm以上の塵埃を1個以上カウントした場合にアラームを出力するようにしてもよい。
【0065】
(ATP法による生菌数計測)
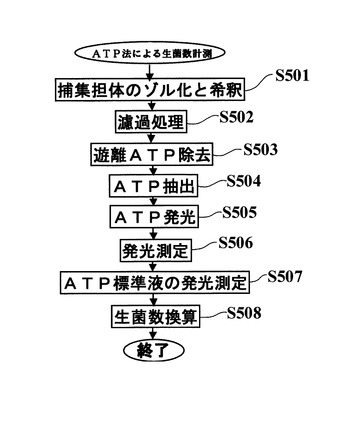
次に、図10に示すフローチャートを参照して、図9のステップS112におけるATP法による生菌数計測の手順について説明する。
まず、菌体分析装置80は、ヒータ部83により、例えば約10分間、菌体分析装置80にセットされた支持容器20内の捕集担体30を30℃以上37℃以下の温度に維持するように制御して、捕集担体30を相転移温度まで加熱し、捕集担体30をゾル状に相転移させる。同時に、温水供給部81により、滅菌溶液を支持容器20内に例えば10〜25mL注入し、捕集担体30のゼラチン濃度が10%以下、グリセロール濃度が25%以下になるまで希釈する(ステップS501)。
【0066】
次に、菌体分析装置80は、濾過部85により、希釈された捕集担体30を支持容器20内から濾過除去することにより、フィルタ21上に菌(生菌と生菌の菌体外に遊離する死菌由来の遊離ATP)を捕捉する(ステップS502)。
【0067】
次に、菌体分析装置80は、試薬分注部87により、フィルタ21上にATP消去液を添加する。ATP消去液は、遊離ATPを分解する試薬であり、例えば、アピラーゼなどを含むものが使用される。これにより、生菌内部のATPを除く遊離ATPが除去される(ステップS503)。
【0068】
次いで、菌体分析装置80は、試薬分注部87により、フィルタ21上にATP抽出液を添加することにより、サンプルを生成する。ATP抽出液は、生菌の細胞膜を溶解して生菌内部のATPを抽出させる試薬であり、例えば、界面活性剤、トリクロロ酢酸(TCA)、トリス緩衝液、エタノール、プロテアーゼ活性を有する溶菌酵素等を含むものが使用される(ステップS504)。これにより、生菌の細胞膜が溶解され、その内部のATPが抽出されるので、ATPの検出が可能となる。
【0069】
次に、菌体分析装置80は、発光試薬中にステップS505で生成されたサンプルを添加することにより、サンプルに含まれるATPを発光させ(ステップS505)、この発光量を発光測定部88により測定する(ステップS506)。
サンプルの発光測定に続いて、ATP標準液の発光量を測定する(ステップS507)。
【0070】
次に、菌体分析装置80は、換算部89により、ATP標準液中のATP量及び発光量に基づいて、測定されたサンプルの発光量をATP量に換算し、さらにそれを生菌数に換算する(ステップS508)。
【0071】
なお、上述した実施形態では、ATP消去剤、ATP抽出剤及び発光試薬を添加する例で説明したが、添加する試薬はこれに限定されるものではなく、必要に応じて試薬の一部を省略したり、別の試薬を添加したりしてもよい。また、ATP標準液の発光量の測定は、サンプル発光測定の前に行ってもよい。また、捕集・計測する対象の菌は特に限定するものではないが、例えばセレウス菌(Bacillus cereus)、枯草菌(Bacillus spizizenii、Corynebacterium renale, Micrococcus luteus)、黄色ブドウ球菌(S. aureus)、表皮ブドウ球菌(S. epidermidis, Citrobacter freundii)、緑膿菌(Pseudomonas aeruginosa)、セラチア菌(Serratia marcescens)などが挙げられる。
【0072】
以上説明したように、本発明の実施形態によれば、浮遊菌捕集装置10の駆動機構22は、直径がピンホール16aのピッチ間隔d未満の円を描くように支持容器20を水平方向に移動させるので、ピンホール16aを通過した空気が衝突する捕集担体30上の領域の中心点の描く軌跡が交わらないように、支持容器20を水平方向に移動させることができ、捕集担体30の表面のピンホール16a直下となる部分が更新されていき、捕集担体30の特定の部分のみが風圧や乾燥によって凹むことを防止することができる。これにより、捕集担体30を短時間で交換しなくても、空気中の浮遊菌を捕集効率を低下させずに1つの捕集担体30で長時間連続的に捕集することが可能となる。なお、上述した実施形態では、ノズル16は等間隔に配列された複数のピンホール16aで構成されているとして説明したが、このノズル16の構成は一例に過ぎない。ノズル16の構成が異なる場合には、ノズル16の構成に合わせて、ノズル16を通過した空気が衝突する捕集担体30上の領域の中心点の描く軌跡が交わらないように、支持容器20を水平方向に移動させるように調整すればよい。
【0073】
また、駆動機構22により支持容器20は鉛直方向に上昇するため、捕集動作中にピンホール16a直下の捕集担体30が乾燥または風圧によって凹むことがあっても、支持容器20が上昇することで、ピンホール16aと捕集面とのギャップ長が維持されるため、高い捕集効率を保つことができる。
【0074】
また、浮遊菌計測作業員は、粒子計測装置60からのアラームの出力により、無菌アイソレータ50内に塵埃が浮遊していることを認識し、アラームが出力された時に浮遊菌捕集装置10に搭載されていた捕集担体30を分析することができるため、生菌を捕集した可能性のある捕集担体30のみを分析することができる。したがって、菌体が捕集されていない捕集担体を分析する手間を省き、生菌のみを迅速かつ的確に計測することができる。また、捕集担体30を交換するまでの時間を長くすることができるため、分析すべき捕集担体30を特定するのが容易となる。
【0075】
また、ゾル−ゲル転移性の捕集担体30を用いることで、捕集担体30の表面に捕捉された菌を濾過によって回収することができるため、捕集した浮遊菌の回収操作が簡便となる。
【0076】
なお、上述した実施形態では、粒子計測装置60がアラームを出力するとして説明したが、これに限定されることはなく、粒子計測装置60に接続された別の装置がアラームを出力してもよい。
【0077】
(第2実施形態)
次に、本発明の第2実施形態について説明する。
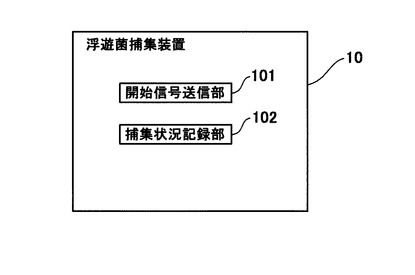
本実施形態に係る浮遊菌捕集装置10は、第1の実施形態に係る浮遊菌捕集装置10が備える機能に加えて、図11に示すように、開始信号送信部101及び捕集状況記録部102を備えている。この機能は浮遊菌捕集装置10のCPUがプログラムを実行することにより実現される。
【0078】
開始信号送信部101は、浮遊菌捕集装置10で浮遊菌の捕集動作が開始された時に、開始信号を粒子計測装置60に送信する。
捕集状況記録部102は、開始信号送信部101が開始信号を送信した時点からの経過時間に対応付けて捕集状況をメモリに記録する。具体的には、捕集状況記録部102は、捕集担体30が交換された時にその旨を経過時間に対応付けて記録する。
【0079】
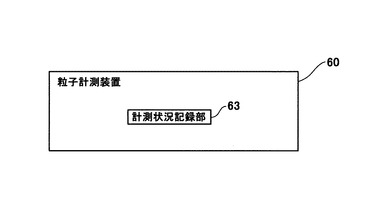
本実施形態に係る粒子計測装置60は、第1の実施形態に係る粒子計測装置60が備える図7に示す機能に替えて、図12に示す計測状況記録部63を備えている。この機能は粒子計測装置60のCPUがプログラムを実行することにより実現される。
【0080】
計測状況記録部63は、浮遊菌捕集装置10から開始信号を受信した時点からの経過時間に対応付けて計測状況をメモリに記録する。具体的には、計測状況記録部63は、計測した塵埃数を経過時間に対応付けて記録する。
【0081】
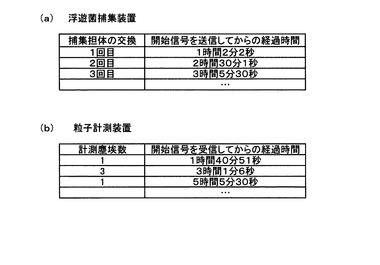
図13(a)には浮遊菌捕集装置10の捕集状況記録部102によって記録された捕集状況の一例を示し、図13(b)には粒子計測装置60の計測状況記録部63によって記録された計測状況の一例を示す。これらのデータによって、無菌アイソレータ50内において塵埃が検出された時と捕集担体30が交換された時との時系列関係が明らかとなり、塵埃が検出された時に浮遊菌捕集装置10に搭載されていた捕集担体30、すなわち浮遊菌を捕集した可能性のある捕集担体30のみを菌体分析装置80で分析することができる。
【0082】
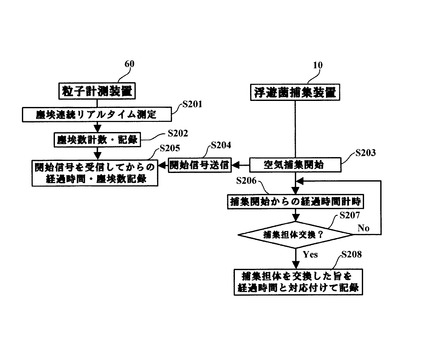
次に、図14を参照して、本実施形態に係る浮遊菌計測方法について説明する。まず、浮遊菌計測作業員は、粒子計測装置60の計測動作を開始するためのスイッチを入れる。これにより、粒子計測装置60は、無菌アイソレータ50内の塵埃の連続リアルタイム測定を開始する(ステップS201)。粒子計測装置60は、塵埃数を計測してメモリに記録する(ステップS202)。
【0083】
次に、浮遊菌計測作業員は、捕集担体30が充填された支持容器20を浮遊菌捕集装置10にセットし、捕集動作を開始するためのスイッチを入れる。これにより、浮遊菌捕集装置10は捕集動作を開始し(ステップS203)、開始信号送信部101は開始信号を粒子計測装置60に送信する(ステップS204)。
【0084】
粒子計測装置60が浮遊菌捕集装置10から開始信号を受信すると、計測状況記録部63は、開始信号を受信した時点からの経過時間と計測した塵埃数とを付けて記録する(ステップS205)。
【0085】
一方、浮遊菌捕集装置10は、捕集動作を開始し開始信号を送信した時点からの経過時間をタイマーで計時する(ステップS206)。そして、タイマーが満了し、捕集担体30が交換されたことを浮遊菌計測作業員のボタン入力で検知すると(ステップS207:Yes)、捕集担体30が交換された旨と経過時間と対応付けてメモリに記録する。
【0086】
これにより、図13(a)に示すようなデータが浮遊菌捕集装置10のメモリに記録され、図13(b)に示すようなデータが粒子計測装置60のメモリに記憶される。浮遊菌計測作業員は、このデータをディスプレイに表示したり印刷したりして参照することで、粒子計測装置60の計測状況と浮遊菌捕集装置10の捕集状況との時系列関係を把握し、粒子計測装置60で塵埃を検出した時点において浮遊菌捕集装置10に搭載されていた捕集担体30を把握することができ、生菌を捕集した可能性のある捕集担体30のみを菌体分析装置80で分析することができる。したがって、浮遊菌が捕集されていない捕集担体30を分析する手間を省き、生菌のみを迅速かつ的確に計測することができる。
【0087】
なお、浮遊菌捕集装置10は、捕集担体30が交換された旨を浮遊菌計測作業員のボタン入力により検知したが、浮遊菌捕集装置10が捕集担体30が交換された旨を検知する方法はこれに限定されることはなく、例えば上蓋14が外されたことや捕集担体30の重さの変化を認識するセンサにより検知してもよいし、タイマーが満了して次のタイマーが起動した場合に捕集担体30が交換されたと認識するようにしてもよい。
【0088】
(第3実施形態)
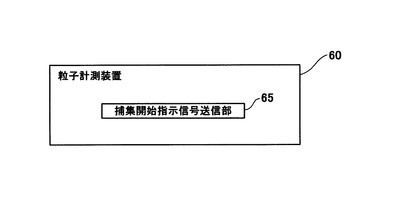
次に、本発明の第3実施形態について説明する。本実施形態では、無菌アイソレータ50内で要求される空気の清浄度が第1実施形態よりも低い場合について説明する。本実施形態に係る粒子計測装置60は、第1の実施形態に係る粒子計測装置60が備える図7に示す機能に替えて、図15に示す捕集開始指示信号送信部65を備えている。この機能は粒子計測装置60のCPUがプログラムを実行することにより実現される。捕集開始指示信号送信部65は、空気中に浮遊する塵埃が閾値(例えば1m3当たり35個)以上検出された時に、捕集開始指示信号を浮遊菌捕集装置10に送信する。
【0089】
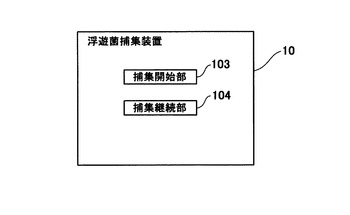
本実施形態に係る浮遊菌捕集装置10は、第1の実施形態に係る浮遊菌捕集装置10が備える機能に加えて、図16に示す捕集開始部103及び捕集継続部104を備えている。これらの機能は、浮遊菌捕集装置10のCPUがプログラムを実行することにより実現される。
【0090】
捕集開始部103は、粒子計測装置60から捕集開始指示信号を受信すると、自動的にスイッチをオンにし、空気中の浮遊菌の捕集動作を開始する。
捕集継続部104は、捕集開始部103により捕集が開始された時点から予め設定された時間(例えば10分)が経過するまで捕集動作を継続する。
【0091】
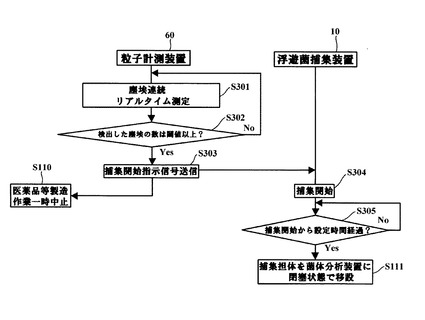
次に、図17を参照して、本実施形態に係る浮遊菌計測方法について説明する。浮遊菌捕集装置10の捕集動作が停止している状態で、浮遊菌計測作業員は粒子計測装置60の計測動作を開始するためのスイッチを入れる。これにより、粒子計測装置60は無菌アイソレータ50内の塵埃の連続リアルタイム測定を行う(ステップS301)。検出された塵埃の数が閾値以上であった場合(ステップS302:Yes)、捕集開始指示信号送信部65は捕集開始指示信号を浮遊菌捕集装置10に送信する(ステップS303)。
【0092】
粒子計測装置60はアラーム等の出力を行い、医薬品等製造作業員は、その出力に基づき医薬品等製造作業を中止する(ステップS110)。
浮遊菌捕集装置10が粒子計測装置60から捕集開始指示信号を受信すると、捕集開始部103は、浮遊菌の捕集動作を開始する(ステップS304)。
【0093】
捕集継続部104は、捕集開始時点から予め設定された時間が経過するまで捕集動作を継続する(ステップS305)。
予め設定された時間が経過した時に、浮遊菌計測作業員は、捕集担体30を閉塞状態で菌体分析装置80に移設する(ステップS111)。
【0094】
ステップS110及びステップS111以降の処理は、第1の実施形態と同様である。
本実施形態によれば、粒子計測装置60が塵埃を検出してから浮遊菌捕集装置10が捕集動作を開始することで、無駄な捕集や分析の手間を省くことができ、生菌のみを迅速かつ的確に計測することができる。
【0095】
なお、上述した実施形態では、「閾値」として、空気中に浮遊する塵埃が「1m3当たり35個」以上検出された時に、捕集開始指示信号を浮遊菌捕集装置10に送信するとして説明したが、「閾値」はこれに限定されることはなく、無菌アイソレータ50で保証すべき清浄度に応じて適宜設定することができる。例えば、清浄度クラスの規格であるJIS B9920によれば、1m3当たりの塵埃の上限濃度は、クラス1では、塵埃の粒径0.1μmの場合10個/m3、粒径0.2μmの場合2個/m3、粒径0.3μmの場合1個/m3である。クラス2では、粒径0.1μmの場合102個/m3、粒径0.2μmの場合24個/m3、粒径0.3μmの場合10個/m3である。クラス3では、粒径0.1μmの場合103個/m3、粒径0.2μmの場合236個/m3、粒径0.3μmの場合101個/m3、粒径0.5μmの場合35個/m3である。クラス4では、粒径0.1μmの場合104個/m3、粒径0.2μmの場合2360個/m3、粒径0.3μmの場合1010個/m3、粒径0.5μmの場合350個/m3である。クラス5では、粒径0.1μmの場合105個/m3、粒径0.2μmの場合23600個/m3、粒径0.3μmの場合10100個/m3、粒径0.5μmの場合3500個/m3、粒径5μmの場合29個/m3である。クラス6では、粒径0.3μmの場合101000個/m3、粒径0.5μmの場合35000個/m3、粒径5μmの場合290個/m3である。クラス7では、塵埃の粒径0.3μmの場合1010000個/m3、粒径0.5μmの場合350000個/m3、粒径5μmの場合2900個/m3である。クラス8では、粒径0.3μmの場合10100000個/m3、粒径0.5μmの場合3500000個/m3、粒径5μmの場合29000個/m3である。そして、無菌アイソレータ50を半導体製造のウェハー工程に使用する場合、清浄度クラスはクラス1〜2が適しており、半導体製造の工業用クリーンルームに使用する場合はクラス3〜8が適している。また、バイオテクノロジーのバイオハザード組換えDNAに使用する場合はクラス3〜4が適しており、バイオクリーンルームに使用する場合はクラス5〜8が適している。医療のバイオクリーン手術室に使用する場合はクラス5〜6が適している。医薬品製造の製剤プロセス、抗生物質、抗がん物質に使用する場合にはクラス3〜7が適している。また、食品製造においては、レトルト食品加工工程に使用する場合はクラス3〜4が適しており、発酵工程に使用する場合はクラス7〜8が適している。本実施形態では、無菌アイソレータ50を医薬品製造等に使用しているため、「閾値」として、例えば「粒径0.5μm以上の塵埃が1m3当たり35個」以上検出された時に、捕集開始指示信号を送信するように設定するとよい。また、閾値は無菌アイソレータ50の使用条件により、前記のクラス1〜8に対応するように任意に設定が可能である。同様に、「予め設定された時間」についても、設定された閾値に応じて適時設定することができる。
【0096】
(第4実施形態)
次に、本発明の第4実施形態について説明する。第1実施形態が第4実施形態と異なる点は、第1実施形態では捕集担体30の濾過を菌体分析装置80が行っているが、第4実施形態では浮遊菌捕集装置10が行う点である。
【0097】
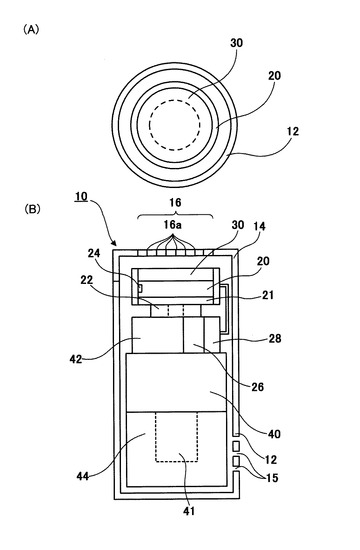
図18(A)は、本実施形態に係る浮遊菌捕集装置10の上部の横断面、(B)は浮遊菌捕集装置10の縦断面を摸式的に示す図である。同図を参照して第1実施形態と異なる構成を説明すると、捕集担体30は、円柱形の支持容器20に無菌的に充填され、その底面はメッシュ状またはドーナツ型の板部材で支持されている。支持容器20の内部には、加温機構としてのヒータ24が設けられている。このヒータ24は、捕集担体30を相転移温度まで精度よく加熱するように制御される。なお、捕集担体30の加温機構は、ヒータ24に限定されるものではなく、捕集担体30を相転移温度に加熱できる機構であればよい。例えば、捕集担体30の周囲にジャケットを装着して温水を流したり、ノズル16から吸い込まれる空気を加熱したりするようにしてもよい。
【0098】
駆動機構22の下方には、捕集担体30を希釈する希釈液が入れられたボトル26、及び当該ボトル26から支持容器20内に希釈液を注入する注入機構28が設けられている。
【0099】
また、本実施形態に係る菌体分析装置80は、温水供給部81とヒータ部83と濾過部85とを備えておらず、試薬分注部87と発光測定部88と換算部89とを備えている。
その他の構成は、第1の実施形態と同様である。
【0100】
上記の如く構成された浮遊菌捕集装置10は、第1の実施形態と同様に捕集動作を行う。捕集動作後、捕集担体30は支持容器20のヒータ24によって捕集担体30の相転移温度まで加熱される。これにより、ゲル状の捕集担体30がゾル状に相転移するので、捕集担体30に捕捉された浮遊菌がゾル状の捕集担体30中に含まれることとなる。
【0101】
ゾル状の捕集担体30は、吸引ポンプ42の駆動により濾過処理され、浮遊菌がフィルタ21に捕捉される。高分子濃度の高い捕集担体30を用いる場合には、注入機構28によりボトル26内の希釈液を支持容器20に注入することによって、ゾル化した捕集担体30を希釈した後、濾過処理を行う。これにより、浮遊菌をフィルタ21上に回収するまでの処理を、浮遊菌捕集装置10内で実施することができる。
【0102】
このように、本実施形態では、浮遊菌捕集装置10に、ヒータ24、希釈液の注入機構28及び吸引ポンプ42を設けたため、捕集動作後、捕集担体30をゾル化し、濾過処理によってゾル化した捕集担体30を濾過除去して浮遊菌を捕捉する過程までを、浮遊菌捕集装置10内で実施することができる。
【0103】
また、捕捉した浮遊菌を菌体分析装置80で解析することにより、浮遊菌捕集装置10と菌体分析装置80とで処理を適切に分業することができ、浮遊菌捕集から分析までにかかる作業の手間と時間、及びATP計測に必要な試薬類の消耗を削減することができる。
【0104】
なお、上述した各実施形態では、粒子計測装置60が無菌アイソレータ50内に設置されているとして説明したが、例えば粒子計測装置60本体に接続された図示せぬ吸引チューブが無菌アイソレータ50内に配置されていれば、粒子計測装置60本体は無菌アイソレータ50の外に設置されていてもよい。
【0105】
また、本発明は医薬品等を製造する室内に限らず、病院、手術室、食品製造工場、半導体製造工場、バイオテクノロジーのクリーンルーム内における浮遊菌計測にも利用することが可能である。
【符号の説明】
【0106】
10………浮遊菌捕集装置、12………ケーシング、14………上蓋、15………排気口、16………ノズル、16a………ピンホール、20………支持容器、22………駆動機構、24………ヒータ、26………ボトル、28………注入機構、30………捕集担体、40………ファン、41………ファン駆動モータ、42………吸引ポンプ、44………濾材、50………無菌アイソレータ、60………粒子計測装置、61………アラーム出力部、63………計測状況記録部、65………捕集開始指示信号送信部、80………菌体分析装置、81………温水供給部、83………ヒータ部、85………濾過部、87………試薬分注部、88………発光測定部、89………換算部、101………開始信号送信部、102………捕集状況記録部、103………捕集開始部、104………捕集継続部。
【技術分野】
【0001】
本発明は、浮遊菌捕集装置、浮遊菌計測方法及び浮遊菌計測システムに関し、特に、空気中に浮遊する浮遊菌を長時間連続して捕集し空気中の生菌数を計測するために用いる浮遊菌捕集装置、浮遊菌計測方法及び浮遊菌計測システムに関する。
【背景技術】
【0002】
従来、医薬品製造分野、病院・手術室、食品工業分野等における浮遊微生物(浮遊菌)の計測技術として、試料に光を照射して試料中の粒子から発せられる散乱光を検出するパーティクルカウンタ(粒子計測装置)を用いる光散乱法、寒天平板培地上に室内空気を吹き付けて恒温器等で当該培地上の微生物を2〜3日培養し、培養後のコロニー数を計測する培養法等が一般的に多く使用されている。
【0003】
しかし、パーティクルカウンタを用いる光散乱法は、その機能上リアルタイムに計測可能であるが、生物由来の微粒子以外にも非生物由来の塵埃等も同時に計測してしまい、室内の生菌数を正確に特定することは不可能であった。
【0004】
また、培養法では、恒温器等で2〜3日培養し培養後のコロニー数を計測するため、生菌検出までに時間がかかるとともに、培養できない菌(培養不能菌)、損傷等を受けた場合や環境状態が悪いために増殖できない状態になっている菌(芽胞状態の菌)、すなわちVNC(Viable but Non- Culturable)菌は計測できないという問題があった。
【0005】
最近では、蛍光分光法による微生物測定とMIE散乱理論に基づくパーティクル測定法を組み合わせた計測装置が開発されている。しかしながら、蛍光分光法は生物由来のNADH(ニコチン酸アミドアデニンジヌクレオチド)を検出するものであるため、生菌と死菌を同時に検出してしまい、生菌と死菌の区別ができないという問題がある。その結果、無菌環境を保証するアイソレータ等の室内において本装置で浮遊菌を検出(カウント)した場合、室内での作業を中断しアイソレータ等を分解、滅菌する必要が生じるが、計測されたものが死菌であった場合には、前記の分解、滅菌作業が無駄なものとなり、作業効率の低下に繋がる。
【0006】
また、浮遊菌の捕集方法として、インパクタの原理を利用した衝突捕集方式が存在する。衝突捕集方式は、ノズルを形成するスリットやピンホールを通過させた空気を捕集担体に高速衝突させることにより、担体表面に浮遊菌を捕捉する方法であり、特許文献1や特許文献2に示すように、ノズル径、ノズルと捕集面とのギャップ、ノズルピッチ等を最適化することにより捕集効率を高める方法や、特許文献3に示すように捕集担体を載せた容器を回転及び上下動させることにより捕集担体上に均一に浮遊菌を捕捉する方法などが提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第642687号公報
【特許文献2】特開2001−169770号公報
【特許文献3】特開平09−215491号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述の衝突捕集方式によって捕集した浮遊菌は一般に培養法により計数されることを想定しているために、捕集担体は浮遊菌の生育に必要な栄養分を含む寒天培地で形成されている。寒天培地上に捕集して判別可能な菌数に限界があること、また捕集動作中に寒天培地が乾燥し、捕集効率が低下することから、一枚の培地で連続捕集できる時間は限られている。更に、特許文献3のように、培地を載せたシャーレの中心を回転軸として回転させたとしても、ノズルの直下となる培地、すなわちシャーレの中心からノズル直下までの距離を半径とする円周上の培地が次第に風圧によって凹んでいき、これによりノズルと捕集面との間のギャップ長が次第に長くなっていくため、長時間捕集を続けた場合は補集効率が低下する。したがって、浮遊菌を連続的に捕集するには、数分毎に培地を交換しなければならず、捕集時間に応じて培地の交換回数が増加し、培養検体数が増大していく。
【0009】
本発明は、このような事情に鑑みてなされたものであり、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することを可能とする浮遊菌捕集装置、これを用いた浮遊菌計測方法及び浮遊菌計測システムを提供することを目的とする。
また、生菌のみを迅速かつ的確に計測することができる浮遊菌計測方法及び浮遊菌計測システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係る浮遊菌捕集装置は、空気を通過させるノズルと、該ノズルの下流に設けられ該ノズルを通過した空気中の浮遊菌を捕集する捕集担体と、該捕集担体を支持する支持容器とを備えた浮遊菌捕集装置であって、前記ノズルを通過した空気が衝突する前記捕集担体上の領域の中心点の描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えたことを特徴とする。
【0011】
上記構成によれば、浮遊菌捕集装置は、ノズルを通過した空気が衝突する捕集担体上の領域の中心点が描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えているため、捕集担体の特定の部分のみが風圧や乾燥によって凹むことを防ぐことができる。したがって、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することが可能となる。
【0012】
また、上記構成に加えて、前記ノズルは、等間隔に配列された複数のピンホールで構成され、前記駆動機構は、前記ピンホール同士のピッチ間隔をdとしたときに、前記支持容器が直径d未満の円を描くように前記支持容器を水平方向に移動させることを特徴とする。
【0013】
このような構成とすれば、捕集担体表面の特定の部分に空気の衝突を集中させずに捕集担体表面のほぼ全体に衝突するようにできるため、捕集担体表面のほぼ全体を捕集面として用いることができる。したがって、乾燥及び風圧による凹みを防ぐことができ、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することが可能となる。
【0014】
また、上記構成に加えて、前記駆動機構は、前記支持容器を鉛直方向に上昇させることを特徴とする。
このように構成することで、ファンにより引き起こされた空気流により空気がノズルを通過し捕集担体に衝突して、空気に含まれる浮遊菌が担体表面に捕捉される捕集動作中に、ノズル直下の捕集担体が乾燥または風圧によって凹むことがあっても、支持容器が上昇することで、ノズルと担体の捕集面とのギャップ長が維持されるため、高い捕集効率を保つことができる。
【0015】
また、本発明に係る浮遊菌計測方法は、捕集担体に空気を衝突させて空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする。
【0016】
上記構成によれば、浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により空気中に浮遊する粒子が検出された時点で浮遊菌捕集装置に搭載されている捕集担体を分析の対象とすることで、粒子計測装置により粒子が検出されなかった時間帯に浮遊菌捕集装置に搭載されていた捕集担体を分析対象から除くことができ、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを的確に早く計測することができる。
【0017】
また、本発明に係る浮遊菌計測方法は、空気が衝突する捕集担体上の領域の中心点の描く軌跡が交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ空気流中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする。
【0018】
上記構成によれば、浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により空気中に浮遊する粒子が検出された時点で浮遊菌捕集装置に搭載されている捕集担体を分析の対象とすることで、粒子計測装置により粒子が検出されなかった時間帯に浮遊菌捕集装置に搭載されていた捕集担体を分析対象から除くことができ、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを的確に早く計測することができる。また、捕集担体を支持する支持容器を水平方向に移動させることで、捕集担体の交換までの時間を長くすることができるため、分析すべき捕集担体を特定するのが容易となる。
【0019】
上記構成において、前記粒子計測装置の計測動作中に前記浮遊菌捕集装置が前記捕集を開始した場合、前記浮遊菌捕集装置が開始信号を前記粒子計測装置に送信する開始信号送信ステップと、前記開始信号が送信された時点からの経過時間に対応付けて、前記粒子計測装置が計測状況を記録するとともに前記浮遊菌捕集装置が捕集状況を記録する記録ステップとを備えることを特徴とする。
【0020】
上記構成によれば、開始信号が送信された時点からの経過時間に対応付けて、前記粒子計測装置が計測状況を記録するとともに前記浮遊菌捕集装置が捕集状況を記録するため、粒子計測装置の計測状況と浮遊菌捕集装置の捕集状況との時系列関係を明らかにすることができ、粒子計測装置で粒子を検出した時点において浮遊菌捕集装置に搭載されていた捕集担体を把握することが可能となるため、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを迅速かつ的確に計測することができる。
【0021】
上記構成に加えて、前記記録ステップにおいて、前記粒子計測装置は計測した粒子の数を前記経過時間に対応付けて記録し、前記浮遊菌捕集装置は前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする。
【0022】
上記構成によれば、粒子計測装置及び浮遊菌捕集装置により記録された内容を経過時間に基づいて照合することで、粒子計測装置が粒子を検出した時点において浮遊菌捕集装置に搭載されていた捕集担体を把握することができるため、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを迅速かつ的確に計測することができる。
【0023】
上記構成において、前記粒子計測装置が空気中に浮遊する粒子を検出した場合に、アラームを出力することを特徴とする。
上記構成によれば、作業員はアラームの出力により空気中に粒子が浮遊していることを認識し、アラームが出力された時に浮遊菌捕集装置に搭載されていた捕集担体を分析することができるため、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを迅速かつ的確に計測することができる。
【0024】
また、本発明に係る浮遊菌計測方法は、空気が衝突する捕集担体上の領域の中心点の描く軌跡が交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ空気中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置が前記空気中に浮遊する粒子を閾値以上検出した時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始信号送信ステップと、前記浮遊菌捕集装置が前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始ステップと、前記捕集が開始されてから予め設定された時間が経過した場合に、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する生菌計測ステップとを備えたことを特徴とする。
【0025】
本発明によれば、粒子計測装置が粒子を検出してから浮遊菌捕集装置が捕集を開始することで、無駄な捕集や分析の手間を省くことができ、生菌のみを迅速かつ的確に計測することができる。
【0026】
また、本発明に係る浮遊菌計測システムは、請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、前記粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする。
【0027】
上記構成において、前記浮遊菌捕集装置は、空気中の浮遊菌の捕集を開始した時に、開始信号を前記粒子計測装置に送信する開始信号送信手段と、前記開始信号が送信された時点からの経過時間に対応付けて捕集状況を記録する捕集状況記録手段とを備え、前記粒子計測装置は、前記開始信号を受信した時点からの経過時間に対応付けて計測状況を記録する計測状況記録手段を備えることを特徴とする。
【0028】
上記構成において、前記計測状況記録手段は、計測した粒子数を前記経過時間に対応付けて記録し、前記捕集状況記録手段は、前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする。
上記構成において、前記粒子計測装置は、空気中に浮遊する粒子を検出した時にアラームを出力するアラーム出力手段を備えることを特徴とする。
【0029】
また、本発明に係る浮遊菌計測システムは、請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、前記粒子計測装置は、前記空気中に浮遊する粒子が閾値以上検出された時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始指示信号送信手段を備え、前記浮遊菌捕集装置は、前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始手段と、前記捕集開始手段により捕集が開始されてから予め設定された時間が経過するまで前記捕集を継続する捕集継続手段とを備えたことを特徴とする。
【発明の効果】
【0030】
本発明によれば、浮遊菌捕集装置は、ノズルを通過した空気が衝突する捕集担体上の領域の中心点が描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えているため、捕集担体の特定の部分のみが風圧や乾燥によって凹むことを防ぐことができる。したがって、捕集担体を交換するまでの時間を長くしても捕集効率を低下させることなく、空気中の浮遊菌を長時間連続的に捕集することが可能となる。
【0031】
また、浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により空気中に浮遊する粒子が検出された時点で浮遊菌捕集装置に搭載されている捕集担体を分析の対象とすることで、粒子計測装置により粒子が検出されなかった時間帯に浮遊菌捕集装置に搭載されていた捕集担体を分析対象から除くことができ、生菌を捕集した可能性のある捕集担体のみを分析し、生菌のみを的確に早く計測することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の第1実施形態に係る浮遊菌計測システムの全体構成を示すブロック図である。
【図2】同実施形態に係る浮遊菌捕集装置の縦断面を摸式的に示す図である。
【図3】同実施形態に係る浮遊菌捕集装置の上蓋の平面図である。
【図4】同実施形態に係る上蓋に設けられたノズル部分の拡大図である。
【図5】同実施形態に係る浮遊菌捕集装置においてノズル及び捕集担体が設置されている部分の縦断面を摸式的に示す図である。
【図6】同実施形態に係るピンホールの位置座標を当該ピンホール直下の捕集担体上に投影した点が、駆動機構による支持容器の水平方向の移動により、捕集担体上に描く軌跡の一例を摸式的に示す図である。
【図7】同実施形態に係る粒子計測装置の機能構成を示すブロック図である。
【図8】同実施形態に係る菌体分析装置の機能構成を示すブロック図である。
【図9】同実施形態に係る浮遊菌計測方法の手順を示す図である。
【図10】同実施形態に係るATP法による生菌数計測の手順を示すフローチャートである。
【図11】本発明の第2実施形態に係る浮遊菌捕集装置の機能構成を示すブロック図である。
【図12】同実施形態に係る粒子計測装置の機能構成を示すブロック図である。
【図13】(a)は、同実施形態に係る浮遊菌捕集装置の捕集状況記録部によって記録される捕集状況の一例を示す図であり、(b)は同実施形態に係る粒子計測装置の計測状況記録部によって記録される計測状況の一例を示す図である。
【図14】同実施形態に係る浮遊菌計測方法の手順を示す図である。
【図15】本発明の第3実施形態に係る粒子計測装置の機能構成を示すブロック図である。
【図16】同実施形態に係る浮遊菌捕集装置の機能構成を示すブロック図である。
【図17】同実施形態に係る浮遊菌計測方法の手順を示す図である。
【図18】(A)は、本発明の第4実施形態に係る浮遊菌捕集装置の上部の横断面、(B)は同実施形態に係る浮遊菌捕集装置の縦断面を摸式的に示す図である。
【発明を実施するための形態】
【0033】
以下、添付図面を参照して、本発明の実施形態について説明する。
(第1実施形態)
まず、本発明の第1実施形態について説明する。図1は、本発明の第1実施形態に係る浮遊菌計測システム1の全体構成を示すブロック図である。同図に示すように、浮遊菌計測システム1は、無菌アイソレータ50内に設置された浮遊菌捕集装置10及び粒子計測装置60と、無菌アイソレータ50の外に設置された菌体分析装置80とで構成され、浮遊菌捕集装置10と粒子計測装置60とは近接して有線又は無線で通信可能に接続されている。
【0034】
無菌アイソレータ50は、無菌状態が保たれるように密閉された部屋(空間)であり、分解したり組み立て(立ち上げ)たりすることが可能である。本実施形態では、無菌アイソレータ50内で医薬品等が製造される。
【0035】
(浮遊菌捕集装置の構成)
図2は、浮遊菌捕集装置10の縦断面を摸式的に示す図である。同図に示すように、浮遊菌捕集装置10には、中空状の円筒形の外壁を形成するケーシング12が設けられている。ケーシング12の天井面には円形の開口部が形成され、その開口部は着脱可能な上蓋14で覆われている。その上蓋14には、空気を通過させるノズル16が設けられている。ノズル16の下方には、空気中の浮遊菌を捕集する捕集担体30が配置されている。捕集担体30は、円柱形の支持容器20に無菌的に充填されている。
【0036】
図3は上蓋14の平面図、図4は上蓋14に設けられたノズル16部分の拡大図、図5は浮遊菌捕集装置10においてノズル16及び捕集担体30が設置されている部分の縦断面を摸式的に示す図である。これらの図に示すように、ノズル16は、等間隔に配列された複数のピンホール16aで構成される。ピンホール16aの径は例えば0.6mmとし、ピンホール16a同士のピッチ間隔dは2.6mmとすることができる。ファン40により吸引された空気は、これらの複数のピンホール16aを通過して捕集担体30へ衝突させられることとなる。
【0037】
捕集担体30は、ノズル16から吸引される空気流に対して直交するように、水平に配置される。したがって、ノズル16から吸引された空気は、捕集担体30に衝突して水平方向に流れを変え、その際に空気中の浮遊菌が捕集担体30の表面に捕捉される。
【0038】
ケーシング12の内部空間の下部には、ノズル16からケーシング12内部への空気流を生成するファン40及び当該ファン40を駆動するためのファン駆動モータ41が設けられている。更にその下流には、排気する空気を清浄化する濾材44が設けられている。
【0039】
捕集担体30が充填された支持容器20とケーシング12の内壁との間には隙間が形成されており、ケーシング12の側面下部には排気口15が形成されている。したがって、捕集担体30に衝突して水平方向に流れた空気は、その隙間を通って下方に流れ、排気口15から排出される。
【0040】
捕集担体30としては、捕集動作時にゲル状であり、所定の温度(例えば40℃以下)に加温することによってゾルに転移するゲル−ゾル転移性の高分子の水溶性樹脂が使用される。捕集担体30は、特に相転移温度が15〜40℃であり、25℃で適度な強度のゲル状であるものが好ましい。この温度範囲で相転移させることによって、捕集した生菌の死滅を回避できる。また、空気の衝突による乾燥を防ぐために、捕集担体30は耐乾燥性であることが好ましい。また、高分子としては、ゼラチン及びグリセロールを含むものが好ましい。捕集時間から必要とされる耐乾燥性能と相転移温度に応じて、ゼラチン濃度は重量比で5〜50%、グリセロール濃度は10〜40%の間で調節する。
【0041】
支持容器20は浮遊菌捕集装置10から着脱可能である。支持容器20の底面には、ゾル化した捕集担体30を排出するための不図示の穴が設けられており、その上には捕集担体30を濾過除去するとともに、捕集担体30により捕集された浮遊菌を捕捉するフィルタ21が設けられている。フィルタ21は、孔径が0.45mm程度のものが使用される。
【0042】
支持容器20の下方には、これを水平方向及び垂直方向に移動させる駆動機構22が設けられている。駆動機構22は、ファン40が駆動される捕集動作中に、支持容器20を水平方向及び鉛直上昇方向に移動させる。駆動機構22は、不図示のモータを駆動源とし、水平方向の移動と鉛直方向の移動を行わせる2系統の不図示のギヤ列が設けられている。水平方向のギヤ列としては、例えば、支持容器20の下方に内歯車を取り付け、当該内歯車が当該内歯車よりも外周が大きい外歯車と噛み合うようにするとよい。或いは、支持容器20の底面に複数の偏心アームを取り付けるようにしてもよい。また、鉛直方向のギヤ列としては、支持容器20の下方にラックギヤを取り付け、当該ラックギヤがピニオンギヤと噛み合うようにすればよい。
【0043】
ピンホール16aを通過した空気が捕集担体30上に衝突する場合に、図5に示すように、ピンホール16aの直下の捕集担体30上に、空気が衝突する領域Rができるが、駆動機構22は、その領域Rの中心点(すなわち、ピンホール16aの位置座標を当該ピンホール16a直下の捕集担体30上に投影した点)の描く軌跡が交わらないように、支持容器20を水平方向に移動させる。図6は、ピンホール16aの位置座標を当該ピンホール16a直下の捕集担体30上に投影した点が、駆動機構22による支持容器20の水平方向への移動によって、捕集担体30上に描く軌跡の一例を摸式的に示す図である。同図に示すように、ピンホール16a同士のピッチ間隔をdとしたときに、駆動機構22は支持容器20が直径d未満の円を描くように、支持容器20を水平方向に移動させる。これにより、捕集担体30の表面のピンホール16a直下となる部分が更新されていくため、捕集担体30の特定の部分に空気が衝突するのを防ぎ、捕集担体30の表面全体を捕集面とすることができる。
【0044】
なお、支持容器20の水平方向の動きは円運動に限定されることはなく、ピンホール16aを通過した空気が衝突する捕集担体30上の領域の中心点の描く軌跡が交わらないように調整できればよい。例えば、支持容器20を楕円や多角形、或いは、Z、S、M等の文字を描くように移動させてもよい。
【0045】
垂直上昇方向の移動速度は、乾燥及び風圧による捕集担体30の凹み速度に応じて設定する。160m3/minの速度で空気を吸引する場合の垂直上昇方向の移動速度は、1mm/hr程度が好ましい。水平方向の移動速度は0.5〜1rpm程度が好ましい。
【0046】
なお、浮遊菌捕集装置10には、図示せぬ、浮遊菌捕集装置10に電力を供給するための電源、捕集動作開始の指令を与えるためのスイッチ、捕集担体30の交換時に作業者が押下するボタンが設けられており、また、これらや駆動機構22、ファン駆動モータ41等を制御するためのCPU(Central Processing Unit)、時間を計時するタイマー、各種データやプログラムを記憶するためのメモリ、記録したデータを出力するためのディスプレイ、印刷装置等が設けられている。
【0047】
上記の如く構成された浮遊菌捕集装置10は、捕集担体30を支持容器20によってノズル16の下方にセットし、ファン駆動モータ41によりファン40を駆動することによって空気をケーシング12内に吸引する。これにより、ノズル16から空気が鉛直下方に吸引され、この空気が捕集担体30に衝突して水平方向に流れを変えるとともに、空気中の浮遊菌がゲル状の捕集担体30に捕捉される。この捕集動作中は、支持容器20の水平移動により、ノズル16直下の捕集面が更新されるとともに、垂直上昇移動により、ノズル16と捕集面のギャップ長が維持される。
【0048】
(粒子計測装置の構成)
粒子計測装置60は、空気中に浮遊する粒子(あらゆる粒子を含む、以下「塵埃」という)の数を計測する一般的なパーティクルカウンタであり、空気に光を照射して空気中の塵埃によって散乱される散乱光を計測することにより、空気中の粒子数をリアルタイムで連続的に計数(カウント)し、計数結果を図示せぬメモリに記録したりディスプレイに表示したり印刷したりする。また、粒子計測装置60は、計測動作を開始させるための図示せぬスイッチを備えている。
【0049】
本実施形態に特徴的な機能として、粒子計測装置60は、図7に示すようにアラーム出力部61を備えている。
アラーム出力部61は、CPUとプログラムと音源データを含んで構成され、塵埃を1つ以上カウントした場合(すなわち塵埃を検出した場合)にアラームを出力する。
【0050】
(菌体分析装置の構成)
菌体分析装置80は、捕集担体30により捕集された菌体をATP(アデノリン−3−リン酸:Adenosine TriPhosphate)法により分析する装置である。ATP法とは、生菌が必ず含有する化学物質であるATPを菌数の指標とし、生物由来の酵素であるルシフェラーゼとその基質タンパク質であるルシフェリンによる生物発光を利用する方法である。具体的には、試料から生菌のATPを抽出し、これに発光剤(ルシフェリン−ルシフェラーゼ混合液)を添加して発光させることによって、発光強度からATP量を求め、当該ATP量を生菌数に換算する方法である。このATP法によれば、数分〜数十分程度で生菌数を求めることが可能である。
【0051】
図8は、菌体分析装置80の機能構成を示すブロック図である。同図に示すように、菌体分析装置80は、温水供給部81と、ヒータ部83と、濾過部85と、試薬分注部87と、発光測定部88と、換算部89とを備えている。
【0052】
温水供給部81は、不図示のポンプ、ヒータ、ノズル等から構成され、捕集担体30を希釈するための温水を供給する。当該温水は滅菌溶液が好ましく、その好ましい組成としては、リン酸バッファーや生理食塩水などが挙げられる。捕集担体30に含まれるゼラチン及びグリセロールの濃度が低いと十分な強度のゲルが得られず、濃度が高いと相転移したゾルの粘性が高くなって濾過が困難になる。そのため、高分子濃度が高い捕集担体30を用いる場合には、ゾル化後に希釈液によってゼラチン濃度は10%以下、グリセロール濃度は25%以下になるまで希釈してから濾過処理することが好ましい。
【0053】
ヒータ部83は、ゲル状態の捕集担体30を加熱することにより、ゾルに転移させる。
濾過部85は、吸引ポンプを含んで構成され、ゾル化した捕集担体30を濾過し、捕集担体30により捕集された菌(生菌及び遊離ATP)をフィルタ21上に残留させる。
【0054】
試薬分注部87は、ノズル、アクチュエータ等から構成され、フィルタ21上に残留した菌に、遊離ATPを除去するATP消去剤や、生菌のATPを抽出するATP抽出剤を分注する。
発光測定部88は、PMT(Photomultiplier Tube:光電子倍増管)を含んで構成され、光子の数を計数することにより発光量を測定する。
【0055】
換算部89は、CPUがプログラムを実行することによって実現される機能であり、発光測定部88が計測した発光量をATP量に換算し、当該ATP量を生菌の数に換算する。
【0056】
(浮遊菌計測方法)
次に、図9を参照して、本実施形態に係る浮遊菌計測システムにおいて行われる浮遊菌計測方法について説明する。ここでは、浮遊菌捕集装置10のタイマーは例えば1時間に設定されているものとする。
医薬品等製造作業員は、無菌アイソレータ50内での医薬品等の製造作業を開始する(ステップS101)。
【0057】
浮遊菌計測作業員は、粒子計測装置60の計測動作を開始するためのスイッチを入れる。これにより、粒子計測装置60は、無菌アイソレータ50内の塵埃の連続リアルタイム測定を開始する(ステップS102)。さらに、浮遊菌計測作業員は、捕集担体30が充填された支持容器20を浮遊菌捕集装置10にセットし、捕集動作を開始するためのスイッチを入れる。これによりタイマーによる計時が開始されるとともに、ファン駆動モータ41によりファン40が駆動され、無菌アイソレータ50内の空気が捕集担体30に衝突して、浮遊菌の捕集動作が開始される。また、捕集動作中は、駆動機構22の駆動により支持容器20が水平移動及び垂直移動する(ステップS103)。
【0058】
粒子計測装置60は、無菌アイソレータ50内の塵埃数を計数してメモリに記録し(ステップS104)、記録した内容及びその時の時刻を示す時間データを浮遊菌捕集装置10に出力する(ステップS105)。
【0059】
浮遊菌捕集装置10は、粒子計測装置60から時間データを受信すると、当該時間データをタイマーで計時中の時間と対応付けてメモリに記録する(ステップS106)。
【0060】
浮遊菌捕集装置10で計時されるタイマーが満了する毎に、浮遊菌計測作業員は、浮遊菌捕集装置10の捕集担体30を支持容器20とともに交換する(ステップS107)。浮遊菌計測作業員は、何回目に交換したものかがわかるように、浮遊菌捕集装置10から取り外した捕集担体30を管理する。
【0061】
ステップS104で計数された塵埃の数がゼロの場合(ステップS108:No)、粒子計測装置60は無菌アイソレータ50内の塵埃測定動作を継続する(ステップS104)。一方、計数された塵埃の数が1以上の場合(ステップS108:Yes)、粒子計測装置60のアラーム出力部61はアラームを出力する(ステップS109)。これにより、無菌アイソレータ50内での医薬品等製造作業を一時中止する(ステップS110)。
【0062】
浮遊菌計測作業員は、アラームが出力された時点で、又はそれから所定時間が経過した後、浮遊菌捕集装置10に搭載されていた捕集担体30を、支持容器20とともに取り外し、閉塞状態で菌体分析装置80に移設する(ステップS111)。なお、浮遊菌計測作業員がその場に不在であった等で、粒子計測装置60からアラームが出力された時点で浮遊菌捕集装置10に搭載されていた捕集担体30をリアルタイムに把握できなった場合には、浮遊菌計測作業員は、浮遊菌捕集装置10により記録されている粒子計測装置60からの時間データに基づいて、塵埃が計測された時点で浮遊菌捕集装置10に搭載されていた捕集担体30を判別する。
【0063】
菌体分析装置80は、浮遊菌捕集装置10から移設された捕集担体30中の生菌数をATP法により計測する(ステップS112)。計測した結果、生菌が存在しなかった場合は(ステップS113:無)、無菌アイソレータ50内で中断していた医薬品等製造作業を開始する(ステップS114)。一方、生菌が存在した場合には、粒子計測装置60による塵埃連続リアルタイム測定を停止する(ステップS115)。そして、無菌アイソレータ50を分解し(ステップS116)、紫外線やオゾンガス等で無菌アイソレータ50を滅菌した後(ステップS117)、無菌アイソレータ50を再度立ち上げる(ステップS118)。そして、無菌アイソレータ50内での医薬品等製造作業を再開する(ステップS119)。
【0064】
なお、上述した実施形態では、粒子計測装置60は塵埃を1個以上カウントした場合にアラームを出力したが、これに限らず、アラームを出力する条件に塵埃の粒径の条件を加えてもよい。例えば、粒径0.5μm以上の塵埃を1個以上カウントした場合にアラームを出力するようにしてもよい。
【0065】
(ATP法による生菌数計測)
次に、図10に示すフローチャートを参照して、図9のステップS112におけるATP法による生菌数計測の手順について説明する。
まず、菌体分析装置80は、ヒータ部83により、例えば約10分間、菌体分析装置80にセットされた支持容器20内の捕集担体30を30℃以上37℃以下の温度に維持するように制御して、捕集担体30を相転移温度まで加熱し、捕集担体30をゾル状に相転移させる。同時に、温水供給部81により、滅菌溶液を支持容器20内に例えば10〜25mL注入し、捕集担体30のゼラチン濃度が10%以下、グリセロール濃度が25%以下になるまで希釈する(ステップS501)。
【0066】
次に、菌体分析装置80は、濾過部85により、希釈された捕集担体30を支持容器20内から濾過除去することにより、フィルタ21上に菌(生菌と生菌の菌体外に遊離する死菌由来の遊離ATP)を捕捉する(ステップS502)。
【0067】
次に、菌体分析装置80は、試薬分注部87により、フィルタ21上にATP消去液を添加する。ATP消去液は、遊離ATPを分解する試薬であり、例えば、アピラーゼなどを含むものが使用される。これにより、生菌内部のATPを除く遊離ATPが除去される(ステップS503)。
【0068】
次いで、菌体分析装置80は、試薬分注部87により、フィルタ21上にATP抽出液を添加することにより、サンプルを生成する。ATP抽出液は、生菌の細胞膜を溶解して生菌内部のATPを抽出させる試薬であり、例えば、界面活性剤、トリクロロ酢酸(TCA)、トリス緩衝液、エタノール、プロテアーゼ活性を有する溶菌酵素等を含むものが使用される(ステップS504)。これにより、生菌の細胞膜が溶解され、その内部のATPが抽出されるので、ATPの検出が可能となる。
【0069】
次に、菌体分析装置80は、発光試薬中にステップS505で生成されたサンプルを添加することにより、サンプルに含まれるATPを発光させ(ステップS505)、この発光量を発光測定部88により測定する(ステップS506)。
サンプルの発光測定に続いて、ATP標準液の発光量を測定する(ステップS507)。
【0070】
次に、菌体分析装置80は、換算部89により、ATP標準液中のATP量及び発光量に基づいて、測定されたサンプルの発光量をATP量に換算し、さらにそれを生菌数に換算する(ステップS508)。
【0071】
なお、上述した実施形態では、ATP消去剤、ATP抽出剤及び発光試薬を添加する例で説明したが、添加する試薬はこれに限定されるものではなく、必要に応じて試薬の一部を省略したり、別の試薬を添加したりしてもよい。また、ATP標準液の発光量の測定は、サンプル発光測定の前に行ってもよい。また、捕集・計測する対象の菌は特に限定するものではないが、例えばセレウス菌(Bacillus cereus)、枯草菌(Bacillus spizizenii、Corynebacterium renale, Micrococcus luteus)、黄色ブドウ球菌(S. aureus)、表皮ブドウ球菌(S. epidermidis, Citrobacter freundii)、緑膿菌(Pseudomonas aeruginosa)、セラチア菌(Serratia marcescens)などが挙げられる。
【0072】
以上説明したように、本発明の実施形態によれば、浮遊菌捕集装置10の駆動機構22は、直径がピンホール16aのピッチ間隔d未満の円を描くように支持容器20を水平方向に移動させるので、ピンホール16aを通過した空気が衝突する捕集担体30上の領域の中心点の描く軌跡が交わらないように、支持容器20を水平方向に移動させることができ、捕集担体30の表面のピンホール16a直下となる部分が更新されていき、捕集担体30の特定の部分のみが風圧や乾燥によって凹むことを防止することができる。これにより、捕集担体30を短時間で交換しなくても、空気中の浮遊菌を捕集効率を低下させずに1つの捕集担体30で長時間連続的に捕集することが可能となる。なお、上述した実施形態では、ノズル16は等間隔に配列された複数のピンホール16aで構成されているとして説明したが、このノズル16の構成は一例に過ぎない。ノズル16の構成が異なる場合には、ノズル16の構成に合わせて、ノズル16を通過した空気が衝突する捕集担体30上の領域の中心点の描く軌跡が交わらないように、支持容器20を水平方向に移動させるように調整すればよい。
【0073】
また、駆動機構22により支持容器20は鉛直方向に上昇するため、捕集動作中にピンホール16a直下の捕集担体30が乾燥または風圧によって凹むことがあっても、支持容器20が上昇することで、ピンホール16aと捕集面とのギャップ長が維持されるため、高い捕集効率を保つことができる。
【0074】
また、浮遊菌計測作業員は、粒子計測装置60からのアラームの出力により、無菌アイソレータ50内に塵埃が浮遊していることを認識し、アラームが出力された時に浮遊菌捕集装置10に搭載されていた捕集担体30を分析することができるため、生菌を捕集した可能性のある捕集担体30のみを分析することができる。したがって、菌体が捕集されていない捕集担体を分析する手間を省き、生菌のみを迅速かつ的確に計測することができる。また、捕集担体30を交換するまでの時間を長くすることができるため、分析すべき捕集担体30を特定するのが容易となる。
【0075】
また、ゾル−ゲル転移性の捕集担体30を用いることで、捕集担体30の表面に捕捉された菌を濾過によって回収することができるため、捕集した浮遊菌の回収操作が簡便となる。
【0076】
なお、上述した実施形態では、粒子計測装置60がアラームを出力するとして説明したが、これに限定されることはなく、粒子計測装置60に接続された別の装置がアラームを出力してもよい。
【0077】
(第2実施形態)
次に、本発明の第2実施形態について説明する。
本実施形態に係る浮遊菌捕集装置10は、第1の実施形態に係る浮遊菌捕集装置10が備える機能に加えて、図11に示すように、開始信号送信部101及び捕集状況記録部102を備えている。この機能は浮遊菌捕集装置10のCPUがプログラムを実行することにより実現される。
【0078】
開始信号送信部101は、浮遊菌捕集装置10で浮遊菌の捕集動作が開始された時に、開始信号を粒子計測装置60に送信する。
捕集状況記録部102は、開始信号送信部101が開始信号を送信した時点からの経過時間に対応付けて捕集状況をメモリに記録する。具体的には、捕集状況記録部102は、捕集担体30が交換された時にその旨を経過時間に対応付けて記録する。
【0079】
本実施形態に係る粒子計測装置60は、第1の実施形態に係る粒子計測装置60が備える図7に示す機能に替えて、図12に示す計測状況記録部63を備えている。この機能は粒子計測装置60のCPUがプログラムを実行することにより実現される。
【0080】
計測状況記録部63は、浮遊菌捕集装置10から開始信号を受信した時点からの経過時間に対応付けて計測状況をメモリに記録する。具体的には、計測状況記録部63は、計測した塵埃数を経過時間に対応付けて記録する。
【0081】
図13(a)には浮遊菌捕集装置10の捕集状況記録部102によって記録された捕集状況の一例を示し、図13(b)には粒子計測装置60の計測状況記録部63によって記録された計測状況の一例を示す。これらのデータによって、無菌アイソレータ50内において塵埃が検出された時と捕集担体30が交換された時との時系列関係が明らかとなり、塵埃が検出された時に浮遊菌捕集装置10に搭載されていた捕集担体30、すなわち浮遊菌を捕集した可能性のある捕集担体30のみを菌体分析装置80で分析することができる。
【0082】
次に、図14を参照して、本実施形態に係る浮遊菌計測方法について説明する。まず、浮遊菌計測作業員は、粒子計測装置60の計測動作を開始するためのスイッチを入れる。これにより、粒子計測装置60は、無菌アイソレータ50内の塵埃の連続リアルタイム測定を開始する(ステップS201)。粒子計測装置60は、塵埃数を計測してメモリに記録する(ステップS202)。
【0083】
次に、浮遊菌計測作業員は、捕集担体30が充填された支持容器20を浮遊菌捕集装置10にセットし、捕集動作を開始するためのスイッチを入れる。これにより、浮遊菌捕集装置10は捕集動作を開始し(ステップS203)、開始信号送信部101は開始信号を粒子計測装置60に送信する(ステップS204)。
【0084】
粒子計測装置60が浮遊菌捕集装置10から開始信号を受信すると、計測状況記録部63は、開始信号を受信した時点からの経過時間と計測した塵埃数とを付けて記録する(ステップS205)。
【0085】
一方、浮遊菌捕集装置10は、捕集動作を開始し開始信号を送信した時点からの経過時間をタイマーで計時する(ステップS206)。そして、タイマーが満了し、捕集担体30が交換されたことを浮遊菌計測作業員のボタン入力で検知すると(ステップS207:Yes)、捕集担体30が交換された旨と経過時間と対応付けてメモリに記録する。
【0086】
これにより、図13(a)に示すようなデータが浮遊菌捕集装置10のメモリに記録され、図13(b)に示すようなデータが粒子計測装置60のメモリに記憶される。浮遊菌計測作業員は、このデータをディスプレイに表示したり印刷したりして参照することで、粒子計測装置60の計測状況と浮遊菌捕集装置10の捕集状況との時系列関係を把握し、粒子計測装置60で塵埃を検出した時点において浮遊菌捕集装置10に搭載されていた捕集担体30を把握することができ、生菌を捕集した可能性のある捕集担体30のみを菌体分析装置80で分析することができる。したがって、浮遊菌が捕集されていない捕集担体30を分析する手間を省き、生菌のみを迅速かつ的確に計測することができる。
【0087】
なお、浮遊菌捕集装置10は、捕集担体30が交換された旨を浮遊菌計測作業員のボタン入力により検知したが、浮遊菌捕集装置10が捕集担体30が交換された旨を検知する方法はこれに限定されることはなく、例えば上蓋14が外されたことや捕集担体30の重さの変化を認識するセンサにより検知してもよいし、タイマーが満了して次のタイマーが起動した場合に捕集担体30が交換されたと認識するようにしてもよい。
【0088】
(第3実施形態)
次に、本発明の第3実施形態について説明する。本実施形態では、無菌アイソレータ50内で要求される空気の清浄度が第1実施形態よりも低い場合について説明する。本実施形態に係る粒子計測装置60は、第1の実施形態に係る粒子計測装置60が備える図7に示す機能に替えて、図15に示す捕集開始指示信号送信部65を備えている。この機能は粒子計測装置60のCPUがプログラムを実行することにより実現される。捕集開始指示信号送信部65は、空気中に浮遊する塵埃が閾値(例えば1m3当たり35個)以上検出された時に、捕集開始指示信号を浮遊菌捕集装置10に送信する。
【0089】
本実施形態に係る浮遊菌捕集装置10は、第1の実施形態に係る浮遊菌捕集装置10が備える機能に加えて、図16に示す捕集開始部103及び捕集継続部104を備えている。これらの機能は、浮遊菌捕集装置10のCPUがプログラムを実行することにより実現される。
【0090】
捕集開始部103は、粒子計測装置60から捕集開始指示信号を受信すると、自動的にスイッチをオンにし、空気中の浮遊菌の捕集動作を開始する。
捕集継続部104は、捕集開始部103により捕集が開始された時点から予め設定された時間(例えば10分)が経過するまで捕集動作を継続する。
【0091】
次に、図17を参照して、本実施形態に係る浮遊菌計測方法について説明する。浮遊菌捕集装置10の捕集動作が停止している状態で、浮遊菌計測作業員は粒子計測装置60の計測動作を開始するためのスイッチを入れる。これにより、粒子計測装置60は無菌アイソレータ50内の塵埃の連続リアルタイム測定を行う(ステップS301)。検出された塵埃の数が閾値以上であった場合(ステップS302:Yes)、捕集開始指示信号送信部65は捕集開始指示信号を浮遊菌捕集装置10に送信する(ステップS303)。
【0092】
粒子計測装置60はアラーム等の出力を行い、医薬品等製造作業員は、その出力に基づき医薬品等製造作業を中止する(ステップS110)。
浮遊菌捕集装置10が粒子計測装置60から捕集開始指示信号を受信すると、捕集開始部103は、浮遊菌の捕集動作を開始する(ステップS304)。
【0093】
捕集継続部104は、捕集開始時点から予め設定された時間が経過するまで捕集動作を継続する(ステップS305)。
予め設定された時間が経過した時に、浮遊菌計測作業員は、捕集担体30を閉塞状態で菌体分析装置80に移設する(ステップS111)。
【0094】
ステップS110及びステップS111以降の処理は、第1の実施形態と同様である。
本実施形態によれば、粒子計測装置60が塵埃を検出してから浮遊菌捕集装置10が捕集動作を開始することで、無駄な捕集や分析の手間を省くことができ、生菌のみを迅速かつ的確に計測することができる。
【0095】
なお、上述した実施形態では、「閾値」として、空気中に浮遊する塵埃が「1m3当たり35個」以上検出された時に、捕集開始指示信号を浮遊菌捕集装置10に送信するとして説明したが、「閾値」はこれに限定されることはなく、無菌アイソレータ50で保証すべき清浄度に応じて適宜設定することができる。例えば、清浄度クラスの規格であるJIS B9920によれば、1m3当たりの塵埃の上限濃度は、クラス1では、塵埃の粒径0.1μmの場合10個/m3、粒径0.2μmの場合2個/m3、粒径0.3μmの場合1個/m3である。クラス2では、粒径0.1μmの場合102個/m3、粒径0.2μmの場合24個/m3、粒径0.3μmの場合10個/m3である。クラス3では、粒径0.1μmの場合103個/m3、粒径0.2μmの場合236個/m3、粒径0.3μmの場合101個/m3、粒径0.5μmの場合35個/m3である。クラス4では、粒径0.1μmの場合104個/m3、粒径0.2μmの場合2360個/m3、粒径0.3μmの場合1010個/m3、粒径0.5μmの場合350個/m3である。クラス5では、粒径0.1μmの場合105個/m3、粒径0.2μmの場合23600個/m3、粒径0.3μmの場合10100個/m3、粒径0.5μmの場合3500個/m3、粒径5μmの場合29個/m3である。クラス6では、粒径0.3μmの場合101000個/m3、粒径0.5μmの場合35000個/m3、粒径5μmの場合290個/m3である。クラス7では、塵埃の粒径0.3μmの場合1010000個/m3、粒径0.5μmの場合350000個/m3、粒径5μmの場合2900個/m3である。クラス8では、粒径0.3μmの場合10100000個/m3、粒径0.5μmの場合3500000個/m3、粒径5μmの場合29000個/m3である。そして、無菌アイソレータ50を半導体製造のウェハー工程に使用する場合、清浄度クラスはクラス1〜2が適しており、半導体製造の工業用クリーンルームに使用する場合はクラス3〜8が適している。また、バイオテクノロジーのバイオハザード組換えDNAに使用する場合はクラス3〜4が適しており、バイオクリーンルームに使用する場合はクラス5〜8が適している。医療のバイオクリーン手術室に使用する場合はクラス5〜6が適している。医薬品製造の製剤プロセス、抗生物質、抗がん物質に使用する場合にはクラス3〜7が適している。また、食品製造においては、レトルト食品加工工程に使用する場合はクラス3〜4が適しており、発酵工程に使用する場合はクラス7〜8が適している。本実施形態では、無菌アイソレータ50を医薬品製造等に使用しているため、「閾値」として、例えば「粒径0.5μm以上の塵埃が1m3当たり35個」以上検出された時に、捕集開始指示信号を送信するように設定するとよい。また、閾値は無菌アイソレータ50の使用条件により、前記のクラス1〜8に対応するように任意に設定が可能である。同様に、「予め設定された時間」についても、設定された閾値に応じて適時設定することができる。
【0096】
(第4実施形態)
次に、本発明の第4実施形態について説明する。第1実施形態が第4実施形態と異なる点は、第1実施形態では捕集担体30の濾過を菌体分析装置80が行っているが、第4実施形態では浮遊菌捕集装置10が行う点である。
【0097】
図18(A)は、本実施形態に係る浮遊菌捕集装置10の上部の横断面、(B)は浮遊菌捕集装置10の縦断面を摸式的に示す図である。同図を参照して第1実施形態と異なる構成を説明すると、捕集担体30は、円柱形の支持容器20に無菌的に充填され、その底面はメッシュ状またはドーナツ型の板部材で支持されている。支持容器20の内部には、加温機構としてのヒータ24が設けられている。このヒータ24は、捕集担体30を相転移温度まで精度よく加熱するように制御される。なお、捕集担体30の加温機構は、ヒータ24に限定されるものではなく、捕集担体30を相転移温度に加熱できる機構であればよい。例えば、捕集担体30の周囲にジャケットを装着して温水を流したり、ノズル16から吸い込まれる空気を加熱したりするようにしてもよい。
【0098】
駆動機構22の下方には、捕集担体30を希釈する希釈液が入れられたボトル26、及び当該ボトル26から支持容器20内に希釈液を注入する注入機構28が設けられている。
【0099】
また、本実施形態に係る菌体分析装置80は、温水供給部81とヒータ部83と濾過部85とを備えておらず、試薬分注部87と発光測定部88と換算部89とを備えている。
その他の構成は、第1の実施形態と同様である。
【0100】
上記の如く構成された浮遊菌捕集装置10は、第1の実施形態と同様に捕集動作を行う。捕集動作後、捕集担体30は支持容器20のヒータ24によって捕集担体30の相転移温度まで加熱される。これにより、ゲル状の捕集担体30がゾル状に相転移するので、捕集担体30に捕捉された浮遊菌がゾル状の捕集担体30中に含まれることとなる。
【0101】
ゾル状の捕集担体30は、吸引ポンプ42の駆動により濾過処理され、浮遊菌がフィルタ21に捕捉される。高分子濃度の高い捕集担体30を用いる場合には、注入機構28によりボトル26内の希釈液を支持容器20に注入することによって、ゾル化した捕集担体30を希釈した後、濾過処理を行う。これにより、浮遊菌をフィルタ21上に回収するまでの処理を、浮遊菌捕集装置10内で実施することができる。
【0102】
このように、本実施形態では、浮遊菌捕集装置10に、ヒータ24、希釈液の注入機構28及び吸引ポンプ42を設けたため、捕集動作後、捕集担体30をゾル化し、濾過処理によってゾル化した捕集担体30を濾過除去して浮遊菌を捕捉する過程までを、浮遊菌捕集装置10内で実施することができる。
【0103】
また、捕捉した浮遊菌を菌体分析装置80で解析することにより、浮遊菌捕集装置10と菌体分析装置80とで処理を適切に分業することができ、浮遊菌捕集から分析までにかかる作業の手間と時間、及びATP計測に必要な試薬類の消耗を削減することができる。
【0104】
なお、上述した各実施形態では、粒子計測装置60が無菌アイソレータ50内に設置されているとして説明したが、例えば粒子計測装置60本体に接続された図示せぬ吸引チューブが無菌アイソレータ50内に配置されていれば、粒子計測装置60本体は無菌アイソレータ50の外に設置されていてもよい。
【0105】
また、本発明は医薬品等を製造する室内に限らず、病院、手術室、食品製造工場、半導体製造工場、バイオテクノロジーのクリーンルーム内における浮遊菌計測にも利用することが可能である。
【符号の説明】
【0106】
10………浮遊菌捕集装置、12………ケーシング、14………上蓋、15………排気口、16………ノズル、16a………ピンホール、20………支持容器、22………駆動機構、24………ヒータ、26………ボトル、28………注入機構、30………捕集担体、40………ファン、41………ファン駆動モータ、42………吸引ポンプ、44………濾材、50………無菌アイソレータ、60………粒子計測装置、61………アラーム出力部、63………計測状況記録部、65………捕集開始指示信号送信部、80………菌体分析装置、81………温水供給部、83………ヒータ部、85………濾過部、87………試薬分注部、88………発光測定部、89………換算部、101………開始信号送信部、102………捕集状況記録部、103………捕集開始部、104………捕集継続部。
【特許請求の範囲】
【請求項1】
空気を通過させるノズルと、該ノズルの下流に設けられ該ノズルを通過した空気中の浮遊菌を捕集する捕集担体と、該捕集担体を支持する支持容器とを備えた浮遊菌捕集装置であって、
前記ノズルを通過した空気が衝突する前記捕集担体上の領域の中心点の描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えたことを特徴とする浮遊菌捕集装置。
【請求項2】
前記ノズルは、等間隔に配列された複数のピンホールで構成され、
前記駆動機構は、前記ピンホール同士のピッチ間隔をdとしたときに、前記支持容器が直径d未満の円を描くように前記支持容器を水平方向に移動させることを特徴とする請求項1に記載の浮遊菌捕集装置。
【請求項3】
前記駆動機構は、前記支持容器を鉛直方向に上昇させることを特徴とする請求項1又は2に記載の浮遊菌捕集装置。
【請求項4】
捕集担体に空気を衝突させて空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、
浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする浮遊菌計測方法。
【請求項5】
空気が衝突する捕集担体上の領域の中心点の描く軌跡が交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ空気中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、
前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする浮遊菌計測方法。
【請求項6】
前記粒子計測装置の計測動作中に前記浮遊菌捕集装置が前記捕集を開始した場合、前記浮遊菌捕集装置が開始信号を前記粒子計測装置に送信する開始信号送信ステップと、
前記開始信号が送信された時点からの経過時間に対応付けて、前記粒子計測装置が計測状況を記録するとともに前記浮遊菌捕集装置が捕集状況を記録する記録ステップと
を備えることを特徴とする請求項4又は5に記載の浮遊菌計測方法。
【請求項7】
前記記録ステップにおいて、前記粒子計測装置は計測した粒子の数を前記経過時間に対応付けて記録し、前記浮遊菌捕集装置は前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする請求項6に記載の浮遊菌計測方法。
【請求項8】
前記粒子計測装置が空気中に浮遊する粒子を検出した場合に、アラームを出力することを特徴とする請求項5に記載の浮遊菌計測方法。
【請求項9】
ノズルを通過した空気が衝突する捕集担体上の領域の中心点の描く軌跡が、交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ前記ノズルを通過した空気中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、
前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置が前記空気中に浮遊する粒子を閾値以上検出した時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始信号送信ステップと、
前記浮遊菌捕集装置が前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始ステップと、
前記捕集が開始されてから予め設定された時間が経過した場合に、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する生菌計測ステップと
を備えたことを特徴とする浮遊菌計測方法。
【請求項10】
請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、
前記粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする浮遊菌計測システム。
【請求項11】
前記浮遊菌捕集装置は、
空気中の浮遊菌の捕集を開始した時に、開始信号を前記粒子計測装置に送信する開始信号送信手段と、
前記開始信号が送信された時点からの経過時間に対応付けて捕集状況を記録する捕集状況記録手段とを備え、
前記粒子計測装置は、
前記開始信号を受信した時点からの経過時間に対応付けて計測状況を記録する計測状況記録手段を備えることを特徴とする請求項10に記載の浮遊菌計測システム。
【請求項12】
前記計測状況記録手段は、計測した粒子数を前記経過時間に対応付けて記録し、
前記捕集状況記録手段は、前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする請求項11に記載の浮遊菌計測システム。
【請求項13】
前記粒子計測装置は、
空気中に浮遊する粒子を検出した時にアラームを出力するアラーム出力手段を備えることを特徴とする請求項10に記載の浮遊菌計測システム。
【請求項14】
請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、
前記粒子計測装置は、
前記空気中に浮遊する粒子が閾値以上検出された時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始指示信号送信手段を備え、
前記浮遊菌捕集装置は、
前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始手段と、
前記捕集開始手段により捕集が開始されてから予め設定された時間が経過するまで前記捕集を継続する捕集継続手段とを備えたことを特徴とする浮遊菌計測システム。
【請求項1】
空気を通過させるノズルと、該ノズルの下流に設けられ該ノズルを通過した空気中の浮遊菌を捕集する捕集担体と、該捕集担体を支持する支持容器とを備えた浮遊菌捕集装置であって、
前記ノズルを通過した空気が衝突する前記捕集担体上の領域の中心点の描く軌跡が、交わらないように、前記支持容器を水平方向に移動させる駆動機構を備えたことを特徴とする浮遊菌捕集装置。
【請求項2】
前記ノズルは、等間隔に配列された複数のピンホールで構成され、
前記駆動機構は、前記ピンホール同士のピッチ間隔をdとしたときに、前記支持容器が直径d未満の円を描くように前記支持容器を水平方向に移動させることを特徴とする請求項1に記載の浮遊菌捕集装置。
【請求項3】
前記駆動機構は、前記支持容器を鉛直方向に上昇させることを特徴とする請求項1又は2に記載の浮遊菌捕集装置。
【請求項4】
捕集担体に空気を衝突させて空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、
浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする浮遊菌計測方法。
【請求項5】
空気が衝突する捕集担体上の領域の中心点の描く軌跡が交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ空気中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、
前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記捕集を行う場合において、前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする浮遊菌計測方法。
【請求項6】
前記粒子計測装置の計測動作中に前記浮遊菌捕集装置が前記捕集を開始した場合、前記浮遊菌捕集装置が開始信号を前記粒子計測装置に送信する開始信号送信ステップと、
前記開始信号が送信された時点からの経過時間に対応付けて、前記粒子計測装置が計測状況を記録するとともに前記浮遊菌捕集装置が捕集状況を記録する記録ステップと
を備えることを特徴とする請求項4又は5に記載の浮遊菌計測方法。
【請求項7】
前記記録ステップにおいて、前記粒子計測装置は計測した粒子の数を前記経過時間に対応付けて記録し、前記浮遊菌捕集装置は前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする請求項6に記載の浮遊菌計測方法。
【請求項8】
前記粒子計測装置が空気中に浮遊する粒子を検出した場合に、アラームを出力することを特徴とする請求項5に記載の浮遊菌計測方法。
【請求項9】
ノズルを通過した空気が衝突する捕集担体上の領域の中心点の描く軌跡が、交わらないように、前記捕集担体を支持する支持容器を水平方向に移動させつつ前記ノズルを通過した空気中の浮遊菌を捕集する浮遊菌捕集装置に搭載された前記捕集担体を分析することにより、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測方法であって、
前記浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置が前記空気中に浮遊する粒子を閾値以上検出した時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始信号送信ステップと、
前記浮遊菌捕集装置が前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始ステップと、
前記捕集が開始されてから予め設定された時間が経過した場合に、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する生菌計測ステップと
を備えたことを特徴とする浮遊菌計測方法。
【請求項10】
請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体を交換しつつ前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体を分析することにより前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、
前記粒子計測装置により前記空気中に浮遊する粒子が検出された時点で前記浮遊菌捕集装置に搭載されている捕集担体を前記分析の対象とすることを特徴とする浮遊菌計測システム。
【請求項11】
前記浮遊菌捕集装置は、
空気中の浮遊菌の捕集を開始した時に、開始信号を前記粒子計測装置に送信する開始信号送信手段と、
前記開始信号が送信された時点からの経過時間に対応付けて捕集状況を記録する捕集状況記録手段とを備え、
前記粒子計測装置は、
前記開始信号を受信した時点からの経過時間に対応付けて計測状況を記録する計測状況記録手段を備えることを特徴とする請求項10に記載の浮遊菌計測システム。
【請求項12】
前記計測状況記録手段は、計測した粒子数を前記経過時間に対応付けて記録し、
前記捕集状況記録手段は、前記捕集担体が交換された時にその旨を前記経過時間に対応付けて記録することを特徴とする請求項11に記載の浮遊菌計測システム。
【請求項13】
前記粒子計測装置は、
空気中に浮遊する粒子を検出した時にアラームを出力するアラーム出力手段を備えることを特徴とする請求項10に記載の浮遊菌計測システム。
【請求項14】
請求項1から3の何れか1項に記載された浮遊菌捕集装置と該浮遊菌捕集装置が配置されている室内の空気中に浮遊する粒子を計測する粒子計測装置とを含み、前記浮遊菌捕集装置に搭載された捕集担体で空気中の浮遊菌を捕集し、前記捕集担体により捕集された生菌の数を計測する浮遊菌計測システムであって、
前記粒子計測装置は、
前記空気中に浮遊する粒子が閾値以上検出された時に捕集開始指示信号を前記浮遊菌捕集装置に送信する捕集開始指示信号送信手段を備え、
前記浮遊菌捕集装置は、
前記捕集開始指示信号を受信した時点から空気中の浮遊菌の捕集を開始する捕集開始手段と、
前記捕集開始手段により捕集が開始されてから予め設定された時間が経過するまで前記捕集を継続する捕集継続手段とを備えたことを特徴とする浮遊菌計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−147362(P2011−147362A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2010−9507(P2010−9507)
【出願日】平成22年1月19日(2010.1.19)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成22年1月19日(2010.1.19)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]