
海底ボーリングマシン
【課題】
海底着座型の海底ボーリングマシン1において、海底堆積層Mのサンプルの採取と、海底岩盤層Nのサンプルの採取を効率的に行うことのできる海底ボーリングマシン1を提供する。
【解決手段】
昇降機構5を介して昇降自在に設置したドリルヘッド3と、先端に地盤を環状に掘削するビットを有する回転掘削用ロッド21と、回転掘削用ロッド21に順次連結する連結ロッド22と、連結ロッド22を収納する収納部20を有した海底ボーリングマシン1において、昇降機構5に切替機構7を設置し、切替機構7にドリルヘッド3及び振動装置2を設置し、振動装置2と着脱自在な振動掘削用ロッド23を有し、切替機構7がドリルヘッド3と振動装置2の位置の切替を行うように構成した。
海底着座型の海底ボーリングマシン1において、海底堆積層Mのサンプルの採取と、海底岩盤層Nのサンプルの採取を効率的に行うことのできる海底ボーリングマシン1を提供する。
【解決手段】
昇降機構5を介して昇降自在に設置したドリルヘッド3と、先端に地盤を環状に掘削するビットを有する回転掘削用ロッド21と、回転掘削用ロッド21に順次連結する連結ロッド22と、連結ロッド22を収納する収納部20を有した海底ボーリングマシン1において、昇降機構5に切替機構7を設置し、切替機構7にドリルヘッド3及び振動装置2を設置し、振動装置2と着脱自在な振動掘削用ロッド23を有し、切替機構7がドリルヘッド3と振動装置2の位置の切替を行うように構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海底地盤の地質調査等に使用する海底着座型の海底ボーリングマシンに関する。
【背景技術】
【0002】
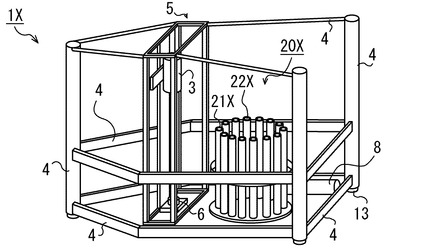
海底地盤の地質調査を行う際に、海底着座型の掘削装置(以下、ボーリングマシンという)を使用している(例えば、特許文献1参照)。図8に、従来の海底ボーリングマシン1Xを示す。このボーリングマシン1Xは、枠体(以下、フレーム4という)で形成した本体と、昇降機構(以下、エレベータ5という)を介して昇降自在に設置したドリルヘッド3と、先端に地盤を環状に掘削するビットを有する回転掘削用ロッド21Xと、回転掘削用ロッド21Xに順次連結する連結ロッド22Xと、連結ロッド22Xを収納する収納部(以下、マガジン20Xという)を有している。
【0003】
また、エレベータ5の昇降及びドリルヘッド3の回転のための動力を供給する油圧動力装置8を有している。更に、海底に対してボーリングマシン1Xを支持する脚13を有している。なお、マガジン20Xには、回転掘削用ロッド21X、連結ロッド22Xを収納するように構成している。
【0004】
次に、このボーリングマシン1Xの動作に関して説明する。まず、海底の堆積層を回転掘削用ロッド21Xで掘削し、岩盤に到達するまで連結ロッド22Xを順次連結しながら掘削を続ける。回転掘削用ロッド21Xが岩盤に到達した後、この回転掘削用ロッド21Xで岩盤の試料(コア)を回収しながら掘削を進める。最後に、回転掘削用ロッド21Xで、岩盤の試料を採取して、サンプリング完了となる。なお、回転掘削用ロッド21Xは、堆積層においては掘削のみを行い、後述するようにコアの回収は不可能となっている。
【0005】
この構成により、船舶上にボーリングマシンを設置してボーリングする場合に比べ、装置全体をコンパクトに構成することができる。つまり、海上から海底まで例えば3000m以上の連結ロッドを連結する等の必要がないためである。
【0006】
また、回転掘削用ロッドの内部に、岩盤のコアを採取するためのインナーチューブを配置し、二重管構造として、効率的なコアの採取を実現したワイヤラインコアサンプリング装置がある(例えば、特許文献2参照)。この構成により、回転掘削用ロッド及び連結ロッドの出し入れなく、インナーチューブのみを交換して、連続的に海底岩盤層のコアを採取することができる。上記の2つの装置を組み合わせる構成により、海底岩盤層のボーリングを効率的に行うことができる。
【0007】
しかしながら、上記の硬い岩盤層のサンプリングを目的とした回転式掘削のボーリングマシンは、海底堆積層のサンプリングを行うことができないという問題を有している。この海底堆積層のサンプリングが行えない理由は、第1に、回転掘削用ロッドの動作により堆積層を攪拌してしまい、サンプルの状態を変えてしまうためである。つまり、サンプルから海底堆積層の状態を正確に把握することが不可能となる。
【0008】
第2に、岩盤層に比べ比較的軟らかい堆積層のサンプルを、回転掘削用ロッド又はインナーチューブ内に保持して回収することができないためである。つまり、岩盤層用の回転掘削用ロッド及びインナーチューブは、先端を閉じる蓋のような構造を有していない。なお、従来は考慮されていなかったが、学術的な観点から、堆積層のサンプルを採取するという要求がでてきている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2006−83552号公報
【特許文献2】特許3803338号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、上記の問題を鑑みてなされたものであり、その目的は、海底着座型の海底ボーリングマシンにおいて、海底堆積層のサンプルの採取と、海底岩盤層のサンプルの採取を効率的に行うことのできる海底ボーリングマシンを提供することにある。更に、ボーリングマシンを作業船上に引上げることなく、1度の作業で、海底堆積層及び海底岩盤層のサンプルを連続的に採取することのできる海底ボーリングマシンを提供することにある。
【課題を解決するための手段】
【0011】
上記の目的を達成するための本発明に係る海底ボーリングマシンは、昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有した海底ボーリングマシンにおいて、前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成したことを特徴とする。
【0012】
この構成により、ボーリングマシンを作業船上に引上げることなく、海底堆積層及び海底岩盤層の試料(サンプル)を連続的に採取することができる。つまり、海底堆積層のサンプルを取得する振動装置及び振動掘削用ロッドと、海底岩盤層のサンプルを取得するドリルヘッド及び回転掘削用ロッドを、切替機構により切り替えられる構成を有している。
【0013】
上記の海底ボーリングマシンにおいて、海底堆積層のサンプルを採取する場合、前記振動装置に前記振動掘削用ロッドを接続し、前記海底堆積層を掘削する制御を行い、海底岩盤層のサンプルを取得する場合、前記切替機構により、前記振動装置と前記ドリルヘッドを切り替え、前記ドリルヘッドに前記回転掘削用ロッドを接続し、前記海底岩盤層を掘削する制御を行うように構成したことを特徴とする。この構成により、従来は取得することのできなかった海底堆積層のサンプルを採取することができる。
【0014】
上記の海底ボーリングマシンにおいて、前記振動掘削用ロッドの下端部に蓋体を設置したことを特徴とする。この構成により、軟弱な海底堆積層のサンプルであっても、採取することができる。
【0015】
上記の目的を達成するための本発明に係る海底ボーリングマシンの制御方法は、昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有し、前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成した海底ボーリングマシンの制御方法であって、海底堆積層の試料を取得する場合、前記振動装置を掘削孔中心線上に配置する切替ステップと、前記振動装置に前記振動掘削用ロッドを連結するステップと、前記振動装置を振動し、且つ前記昇降装置を降下して前記海底堆積層を掘削するステップと、前記振動用掘削ロッドを前記収納部内に回収する試料回収ステップを有し、前記海底岩盤層の試料を取得する場合、前記ドリルヘッドを掘削孔中心線上に配置する切替ステップと、前記ドリルヘッドに前記回転掘削用ロッドを連結するステップと、前記ドリルヘッドを回転し、且つ前記昇降機構を降下して前記海底岩盤層を掘削するステップと、前記海底岩盤層の試料を回収するステップを有したことを特徴とする。
【0016】
この構成により、上記と同様の作用効果を得ることができる。なお、掘削孔中心線上とは、筒状の振動掘削用ロッド及び回転掘削用ロッドが形成する掘削孔において、この円形の掘削孔の中心の集合を意味する。また、掘削を予定している位置に対しても、同様に掘削孔中心線と呼ぶ。
【発明の効果】
【0017】
本発明に係る海底ボーリングマシンによれば、海底堆積層のサンプルの採取と、海底岩盤層のサンプルの採取を効率的に行うことのできる海底ボーリングマシンを提供するができる。更に、ボーリングマシンを作業船上に引上げることなく、1度の作業で、海底堆積層及び海底岩盤層のサンプルを連続的に採取することのできる海底ボーリングマシンを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る実施の形態の海底ボーリングマシンの概略を示した図である。
【図2】本発明に係る実施の形態の海底ボーリングマシンの動作を示した図である。
【図3】本発明に係る実施の形態の海底ボーリングマシンの動作を示した図である。
【図4】本発明に係る実施の形態の海底ボーリングマシンの機構の一部を示した図である。
【図5】本発明に係る実施の形態の海底ボーリングマシンの切替機構を示した図である。
【図6】本発明に係る実施の形態の海底ボーリングマシンの振動装置の概略を示した図である。
【図7】本発明に係る実施の形態の海底ボーリングマシンの振動掘削用ロッドの端部を示した図である。
【図8】従来の海底ボーリングマシンの概略を示した図である。
【発明を実施するための形態】
【0019】
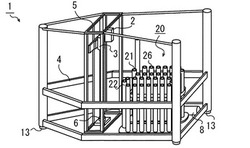
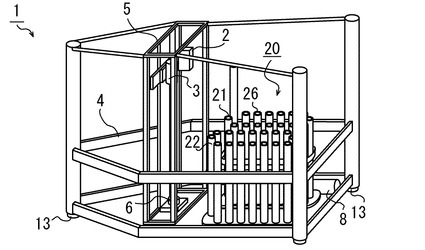
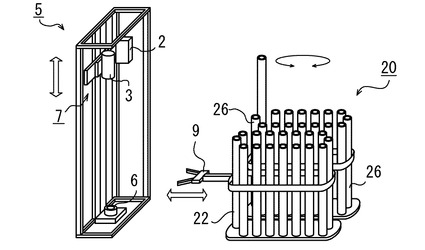
以下、本発明に係る実施の形態の海底ボーリングマシンについて、図面を参照しながら説明する。図1に、海底ボーリングマシン1の概略を示す。このボーリングマシン1は、枠体(以下、フレーム4という)で形成した本体と、昇降機構(以下、エレベータ5という)を介して昇降自在に設置したドリルヘッド3と、先端に地盤を環状に掘削するビットを有する回転掘削用ロッド21と、回転掘削用ロッド21に順次連結する連結ロッド22と、連結ロッド22を収納する収納部(以下、マガジン20という)を有している。また、ドリルヘッド3と並ぶように、振動掘削用の振動装置(以下、バイブロコアラー2という)を有している。
【0020】
このバイブロコアラー2とドリルヘッド3は、例えば、水平方向にスライド可能に構成し、この2つを切り替えて使用できるように構成している。また、ボーリングマシン1は、2つのマガジン20を有している。このマガジン20は、少なくとも1本の回転掘削用ロッド21及び複数の連結ロッド22に加えて、少なくとも1本の振動掘削用ロッド23及びサンプル(コア)を採取するための複数のインナーチューブ26を収納している。更に、ボーリングマシン1は、エレベータ5の昇降及びドリルヘッド3の回転の動力を伝達する油圧動力装置8と、海底に対してボーリングマシン1を支持する脚13を有している。
【0021】
なお、図示していないが、ボーリングマシン1は、位置を制御するためのスラスター、
沈降及び浮上を制御するためのバラストタンク等を有していることが望ましい。また、ボーリングマシン1に、作業船上のオペレータが海底の状態を把握するためのカメラ、照明、ソナー、及び各種センサーを設置してもよい。
【0022】
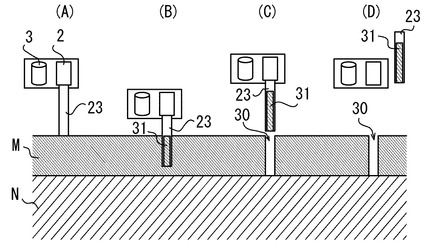
次に、海底ボーリングマシン1の動作に関して説明する。図2に、海底堆積層Mのボーリングの様子を示す。まず、バイブロコアラー2に、振動掘削用ロッド23を連結する(図2A参照)。振動掘削用ロッド23に、バイブロコアラー2で鉛直方向に振動を加える。この振動により、振動掘削用ロッド23は、堆積層Mを掘削しながら、サンプル(コア)31を内部に取り込む。このとき、掘削の進展に伴いエレベータ5は、バイブロコアラー2を降下していく(図2B参照)。
【0023】
振動掘削用ロッド23の下端が、海底岩盤層Nに達した時点で、振動掘削を完了とし、バイブロコアラー2及び振動掘削用ロッド23を引上げる(図2C参照)。サンプル(コア)31を内包した振動掘削用ロッド23を、バイブロコアラー2から取り外し、マガジン20に収納する(図2D参照)。なお、振動掘削用ロッド23は、堆積層Mのサンプルをこぼさずに、回収する構造を有している。具体的には、下面に蓋体を設置する等の構造を有している。
【0024】
ここで、海底堆積層Mが、振動掘削用ロッド23の長さよりも深い場合は、図2Dの状態の後に、掘削孔30に異なる振動掘削用ロッド23aを挿入し、更に、振動掘削用ロッド23aの上端に連結ロッド22を連結し、再び振動掘削を行う。
【0025】
また、振動掘削用ロッド23の下端が、海底岩盤層Nに達したことの判定は、事前に物理探査等で推定した海底堆積層Mの深さから行うことができる。または、振動掘削用ロッド23による掘削速度が、予め定めた値よりも遅くなった場合に、海底岩盤層Nに達したと判定するように構成してもよい。
【0026】
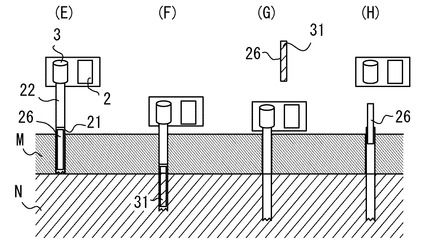
図3に、海底岩盤層Nのサンプリングの様子を示す。海底堆積層Mのサンプリング終了後、バイブロコアラー2をドリルヘッド3に切り替える。掘削孔30に回転掘削用ロッド21を挿入し、更に、回転掘削用ロッド21の上端に連結ロッド22を連結する(図3E参照)。このとき、回転掘削用ロッド21にインナーチューブ26を挿入しておき、ワイヤラインコアサンプリングを行う構成とすることが望ましい。
【0027】
回転掘削用ロッド21に、ドリルヘッド3で回転を加える。この回転により、回転掘削用ロッド21は、岩盤層Nを掘削しながら、コア31をインナーチューブ26内に取り込む。このとき、掘削の進展に伴いエレベータ5は、ドリルヘッド3を降下していく(図3F参照)。ワイヤラインコアサンプルリングの場合は、コア31を十分に採取したインナーチューブ26を、ワイヤ等でボーリングマシン1に引き上げる(図3G参照)。このインナーチューブ26を、マガジン20に収納する。新たなインナーチューブ26を、回転掘削用ロッド21に送り込み、その後新たな連結ロッド22を連結し、更に掘削を進めていく(図3H参照)。
【0028】
なお、海底でのボーリング作業が終了した後に、掘削孔30の内部に筒状のケーシングを挿入し、掘削孔30を再利用できるように維持してもよい。具体的には、地震計や温度計等を掘削孔30内に設置して利用することができる。このケーシングはマガジン20に搭載しておくことができる。
【0029】
上記の構成により、ボーリングマシン1は、海底堆積層M及び海底岩盤層Nの連続的なボーリングを実現することができる。特に、海面下1000m〜3000m、又は3000m以上の海底でボーリングを行う場合は、ボーリングマシン1を作業船上に引上げるこ
となく、連続的なボーリングをすることができるため、作業効率を飛躍的に向上することができる。
【0030】
ここで、ワイヤラインサンプリングを行わず、回転掘削用ロッド21の代わりに、コア回収用のコアチューブを利用して、コア31の採取を行うように構成してもよい。ただし、サンプリングを行う深度が、例えば30〜50m又は50m以上と深い場合は、ワイヤラインサンプリングの方が効率がよい。
【0031】
以上の手順で、海底のボーリングを行う。なお、マガジン20に交換用の回転掘削用ロッド21を複数本搭載してもよい。また、ボーリングマシン1がスラスター等で移動し、1回の沈降で、複数個所のボーリングを行うように構成することもできる。この構成により、ボーリングマシン1を作業船から海底へ沈降させる作業が少なくなり、ボーリング作業の効率を向上することができる。このとき、複数の堆積層Mのサンプルを採取するために、マガジン20に複数の振動掘削用ロッド23を複数本搭載してもよい。
【0032】
図4に、エレベータ5及びマガジン20の具体的な構成を示す。エレベータ5は、切替機構7を介して設置したバイブロコアラー2及びドリルヘッド3を有している。また、連結ロッド22等を連結及び連結解除するためのロッドホルダ6を有している。マガジン20は、楕円状に複数の連結ロッド22及びインナーチューブ26を並べて収納している。
【0033】
また、マガジン20は、エレベータ5との間で、連結ロッド22等を受け渡しする運搬アーム9を有している。ここで、連結ロッド22等の大きさは、任意に決定することができるが、例えば直径を70〜110mm程度、長さを1500mm〜3000mm程度とすることができる。なお、このとき、ボーリングマシン1は、底面を4000mm×4000mm程度、高さを6000mm程度となる。
【0034】
次に、エレベータ5及びマガジン20の動作について説明する。まず、マガジン20に収納している連結ロッド22等を、運搬アーム9でドリルヘッド3に連結する。なお、ドリルヘッド3は、下面部にチャックを有しており、連結ロッド22等を把持できるように構成している。
【0035】
次に、掘削作業の進展に伴いドリルヘッド3は、エレベータ5により降下する。ドリルヘッド3がほぼ最下端に達したところで、ロッドホルダ6で連結ロッド22等を把持し、連結ロッド22等とドリルヘッド3の連結を解除する。その後、ドリルヘッド3を上昇させ、運搬アーム9で新たな連結ロッド22等をロッドホルダ6の上部に供給する。
【0036】
ロッドホルダ6は、内臓したねじきり装置を作動し、把持している連結ロッド22等を新たな連結ロッド22等に螺合する。新たな連結ロッド22等の上端を、ドリルヘッド3で把持し、掘削を再開する。このとき、マガジン20は、回転しながら、順次、連結ロッド22等を運搬アーム9に供給し、また、回収することができる。
【0037】
図5に、切替機構7に設置したバイブロコアラー2及びドリルヘッド3を示す。切替機構7は、エレベータ5に昇降自在に設置した昇降用基板10と、昇降用基板10に沿ってスライド可能に設置した切替用基板(以下、スライド板11という)と、スライド板11に動力を加える油圧シリンダ12を有している。このスライド板11に、バイブロコアラー2及びドリルヘッド3を固定している。
【0038】
なお、Sは掘削孔中心線を示しており、この延長線上に連結ロッド22等があり、また、ロッドホルダ6の中心がある。つまり、図5Aは、ドリルヘッド3を使用し、回転掘削を行っている場合を示しており、図5Bは、バイブロコアラー2を使用し、振動掘削を行っている場合を示している。ここで、油圧シリンダ12の他の機構により、スライド板11を移動するように構成することもできる。ただし、水圧の高い海底で安定的に動作する必要があるため、油圧機構を利用することが望ましい。
【0039】
ここで、バイブロコアラー2は、振動を伝達しない又は減衰する機構を介して、スライド板11に設置することが望ましい。具体的には、例えば防振ゴム、及び免振装置等を利用することができる。この構成により、バイブロコアラー2の振動が、他の機器、特にドリルヘッド3に伝わりにくいため、機器の故障を防止することができる。例えば、水面下3000m以上の海底で、ボーリングを行う場合は、ボーリングマシン1の修理に多大な時間とコストが必要となる。
【0040】
また、バイブロコアラー2とドリルヘッド3を鉛直方向に配置しないことが望ましい。更に望ましくは、図5に示す様に水平方向に配置する。これは、バイブロコアラー2で発生した鉛直方向の振動が、ドリルヘッド3に伝わり、故障の原因となることを防止するためである。
【0041】
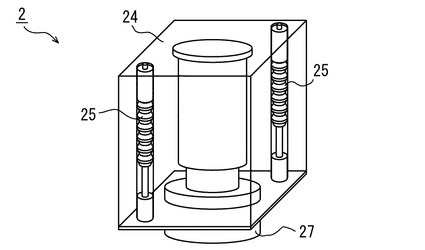
図6に、バイブロコアラー2の1例の透視図を示す。バイブロコアラー2は、おもり部(以下、リアクションマス24という)と、バネ機構25と、連結ロッド22等を把持するチャック27を有している。バネ機構25で発生する鉛直方向の振動により、リアクションマス24が振動し、この振動により、振動掘削用ロッド23で堆積層Mを掘削していく。なお、バネ機構25は、例えば皿バネ等を利用することができる。また、リアクションマス24は、例えば100〜300kg程度に構成するとよい。
【0042】
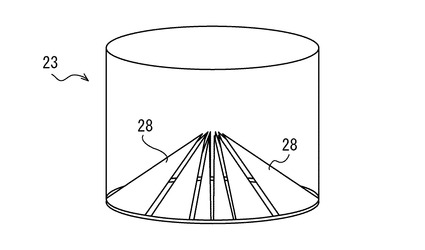
図7に、振動掘削用ロッド23の先端部に設置する蓋体28の1例の透視図を示す。蓋体28は、円板状の平板に、中心から外周方向に向かって複数の切込みを入れたような形状に形成している。この蓋体28は、例えば、ある程度の柔軟性を有する金属製薄板又は合成樹脂製の平板等で形成することができる。蓋体28は、下方から侵入してくる海底堆積層Mのコアを通過させ、一旦、蓋体28を通過したコアを下方に戻さないように構成している。
【0043】
この構成により、振動掘削用ロッド23は、海底岩盤層Nに比べて、比較的軟弱な海底堆積層Mのコアを、振動掘削用ロッド23内に収納し、且つ、外部(下方)に漏らさないため、海底堆積層Mのコアを採取することができる。なお、蓋体28は、上記の構成の他に、例えば、スライド板で振動掘削用ロッド23の下端部を閉止するシャッター方式や、クラブバケットのように、振動掘削用ロッド23の下端部の左右から回転運動により蓋体28を移動させて閉止する方式等を採用することができる。ここで、蓋体28は、軟弱な海底堆積層Mを下方に漏らさない構造であれば、上記以外の構造も採用することができる。
【符号の説明】
【0044】
1 海底ボーリングマシン(ボーリングマシン)
2 振動装置(バイブロコアラー)
3 ドリルヘッド
4 枠体(フレーム)
5 昇降機構(エレベータ)
7 切替機構
10 昇降用基板
11 切替用基板(スライド板)
20 収納部(マガジン)
21 回転掘削用ロッド
22 連結ロッド
23 振動掘削用ロッド
28 蓋体
M 海底堆積層
N 海底岩盤層
【技術分野】
【0001】
本発明は、海底地盤の地質調査等に使用する海底着座型の海底ボーリングマシンに関する。
【背景技術】
【0002】
海底地盤の地質調査を行う際に、海底着座型の掘削装置(以下、ボーリングマシンという)を使用している(例えば、特許文献1参照)。図8に、従来の海底ボーリングマシン1Xを示す。このボーリングマシン1Xは、枠体(以下、フレーム4という)で形成した本体と、昇降機構(以下、エレベータ5という)を介して昇降自在に設置したドリルヘッド3と、先端に地盤を環状に掘削するビットを有する回転掘削用ロッド21Xと、回転掘削用ロッド21Xに順次連結する連結ロッド22Xと、連結ロッド22Xを収納する収納部(以下、マガジン20Xという)を有している。
【0003】
また、エレベータ5の昇降及びドリルヘッド3の回転のための動力を供給する油圧動力装置8を有している。更に、海底に対してボーリングマシン1Xを支持する脚13を有している。なお、マガジン20Xには、回転掘削用ロッド21X、連結ロッド22Xを収納するように構成している。
【0004】
次に、このボーリングマシン1Xの動作に関して説明する。まず、海底の堆積層を回転掘削用ロッド21Xで掘削し、岩盤に到達するまで連結ロッド22Xを順次連結しながら掘削を続ける。回転掘削用ロッド21Xが岩盤に到達した後、この回転掘削用ロッド21Xで岩盤の試料(コア)を回収しながら掘削を進める。最後に、回転掘削用ロッド21Xで、岩盤の試料を採取して、サンプリング完了となる。なお、回転掘削用ロッド21Xは、堆積層においては掘削のみを行い、後述するようにコアの回収は不可能となっている。
【0005】
この構成により、船舶上にボーリングマシンを設置してボーリングする場合に比べ、装置全体をコンパクトに構成することができる。つまり、海上から海底まで例えば3000m以上の連結ロッドを連結する等の必要がないためである。
【0006】
また、回転掘削用ロッドの内部に、岩盤のコアを採取するためのインナーチューブを配置し、二重管構造として、効率的なコアの採取を実現したワイヤラインコアサンプリング装置がある(例えば、特許文献2参照)。この構成により、回転掘削用ロッド及び連結ロッドの出し入れなく、インナーチューブのみを交換して、連続的に海底岩盤層のコアを採取することができる。上記の2つの装置を組み合わせる構成により、海底岩盤層のボーリングを効率的に行うことができる。
【0007】
しかしながら、上記の硬い岩盤層のサンプリングを目的とした回転式掘削のボーリングマシンは、海底堆積層のサンプリングを行うことができないという問題を有している。この海底堆積層のサンプリングが行えない理由は、第1に、回転掘削用ロッドの動作により堆積層を攪拌してしまい、サンプルの状態を変えてしまうためである。つまり、サンプルから海底堆積層の状態を正確に把握することが不可能となる。
【0008】
第2に、岩盤層に比べ比較的軟らかい堆積層のサンプルを、回転掘削用ロッド又はインナーチューブ内に保持して回収することができないためである。つまり、岩盤層用の回転掘削用ロッド及びインナーチューブは、先端を閉じる蓋のような構造を有していない。なお、従来は考慮されていなかったが、学術的な観点から、堆積層のサンプルを採取するという要求がでてきている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2006−83552号公報
【特許文献2】特許3803338号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、上記の問題を鑑みてなされたものであり、その目的は、海底着座型の海底ボーリングマシンにおいて、海底堆積層のサンプルの採取と、海底岩盤層のサンプルの採取を効率的に行うことのできる海底ボーリングマシンを提供することにある。更に、ボーリングマシンを作業船上に引上げることなく、1度の作業で、海底堆積層及び海底岩盤層のサンプルを連続的に採取することのできる海底ボーリングマシンを提供することにある。
【課題を解決するための手段】
【0011】
上記の目的を達成するための本発明に係る海底ボーリングマシンは、昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有した海底ボーリングマシンにおいて、前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成したことを特徴とする。
【0012】
この構成により、ボーリングマシンを作業船上に引上げることなく、海底堆積層及び海底岩盤層の試料(サンプル)を連続的に採取することができる。つまり、海底堆積層のサンプルを取得する振動装置及び振動掘削用ロッドと、海底岩盤層のサンプルを取得するドリルヘッド及び回転掘削用ロッドを、切替機構により切り替えられる構成を有している。
【0013】
上記の海底ボーリングマシンにおいて、海底堆積層のサンプルを採取する場合、前記振動装置に前記振動掘削用ロッドを接続し、前記海底堆積層を掘削する制御を行い、海底岩盤層のサンプルを取得する場合、前記切替機構により、前記振動装置と前記ドリルヘッドを切り替え、前記ドリルヘッドに前記回転掘削用ロッドを接続し、前記海底岩盤層を掘削する制御を行うように構成したことを特徴とする。この構成により、従来は取得することのできなかった海底堆積層のサンプルを採取することができる。
【0014】
上記の海底ボーリングマシンにおいて、前記振動掘削用ロッドの下端部に蓋体を設置したことを特徴とする。この構成により、軟弱な海底堆積層のサンプルであっても、採取することができる。
【0015】
上記の目的を達成するための本発明に係る海底ボーリングマシンの制御方法は、昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有し、前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成した海底ボーリングマシンの制御方法であって、海底堆積層の試料を取得する場合、前記振動装置を掘削孔中心線上に配置する切替ステップと、前記振動装置に前記振動掘削用ロッドを連結するステップと、前記振動装置を振動し、且つ前記昇降装置を降下して前記海底堆積層を掘削するステップと、前記振動用掘削ロッドを前記収納部内に回収する試料回収ステップを有し、前記海底岩盤層の試料を取得する場合、前記ドリルヘッドを掘削孔中心線上に配置する切替ステップと、前記ドリルヘッドに前記回転掘削用ロッドを連結するステップと、前記ドリルヘッドを回転し、且つ前記昇降機構を降下して前記海底岩盤層を掘削するステップと、前記海底岩盤層の試料を回収するステップを有したことを特徴とする。
【0016】
この構成により、上記と同様の作用効果を得ることができる。なお、掘削孔中心線上とは、筒状の振動掘削用ロッド及び回転掘削用ロッドが形成する掘削孔において、この円形の掘削孔の中心の集合を意味する。また、掘削を予定している位置に対しても、同様に掘削孔中心線と呼ぶ。
【発明の効果】
【0017】
本発明に係る海底ボーリングマシンによれば、海底堆積層のサンプルの採取と、海底岩盤層のサンプルの採取を効率的に行うことのできる海底ボーリングマシンを提供するができる。更に、ボーリングマシンを作業船上に引上げることなく、1度の作業で、海底堆積層及び海底岩盤層のサンプルを連続的に採取することのできる海底ボーリングマシンを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る実施の形態の海底ボーリングマシンの概略を示した図である。
【図2】本発明に係る実施の形態の海底ボーリングマシンの動作を示した図である。
【図3】本発明に係る実施の形態の海底ボーリングマシンの動作を示した図である。
【図4】本発明に係る実施の形態の海底ボーリングマシンの機構の一部を示した図である。
【図5】本発明に係る実施の形態の海底ボーリングマシンの切替機構を示した図である。
【図6】本発明に係る実施の形態の海底ボーリングマシンの振動装置の概略を示した図である。
【図7】本発明に係る実施の形態の海底ボーリングマシンの振動掘削用ロッドの端部を示した図である。
【図8】従来の海底ボーリングマシンの概略を示した図である。
【発明を実施するための形態】
【0019】
以下、本発明に係る実施の形態の海底ボーリングマシンについて、図面を参照しながら説明する。図1に、海底ボーリングマシン1の概略を示す。このボーリングマシン1は、枠体(以下、フレーム4という)で形成した本体と、昇降機構(以下、エレベータ5という)を介して昇降自在に設置したドリルヘッド3と、先端に地盤を環状に掘削するビットを有する回転掘削用ロッド21と、回転掘削用ロッド21に順次連結する連結ロッド22と、連結ロッド22を収納する収納部(以下、マガジン20という)を有している。また、ドリルヘッド3と並ぶように、振動掘削用の振動装置(以下、バイブロコアラー2という)を有している。
【0020】
このバイブロコアラー2とドリルヘッド3は、例えば、水平方向にスライド可能に構成し、この2つを切り替えて使用できるように構成している。また、ボーリングマシン1は、2つのマガジン20を有している。このマガジン20は、少なくとも1本の回転掘削用ロッド21及び複数の連結ロッド22に加えて、少なくとも1本の振動掘削用ロッド23及びサンプル(コア)を採取するための複数のインナーチューブ26を収納している。更に、ボーリングマシン1は、エレベータ5の昇降及びドリルヘッド3の回転の動力を伝達する油圧動力装置8と、海底に対してボーリングマシン1を支持する脚13を有している。
【0021】
なお、図示していないが、ボーリングマシン1は、位置を制御するためのスラスター、
沈降及び浮上を制御するためのバラストタンク等を有していることが望ましい。また、ボーリングマシン1に、作業船上のオペレータが海底の状態を把握するためのカメラ、照明、ソナー、及び各種センサーを設置してもよい。
【0022】
次に、海底ボーリングマシン1の動作に関して説明する。図2に、海底堆積層Mのボーリングの様子を示す。まず、バイブロコアラー2に、振動掘削用ロッド23を連結する(図2A参照)。振動掘削用ロッド23に、バイブロコアラー2で鉛直方向に振動を加える。この振動により、振動掘削用ロッド23は、堆積層Mを掘削しながら、サンプル(コア)31を内部に取り込む。このとき、掘削の進展に伴いエレベータ5は、バイブロコアラー2を降下していく(図2B参照)。
【0023】
振動掘削用ロッド23の下端が、海底岩盤層Nに達した時点で、振動掘削を完了とし、バイブロコアラー2及び振動掘削用ロッド23を引上げる(図2C参照)。サンプル(コア)31を内包した振動掘削用ロッド23を、バイブロコアラー2から取り外し、マガジン20に収納する(図2D参照)。なお、振動掘削用ロッド23は、堆積層Mのサンプルをこぼさずに、回収する構造を有している。具体的には、下面に蓋体を設置する等の構造を有している。
【0024】
ここで、海底堆積層Mが、振動掘削用ロッド23の長さよりも深い場合は、図2Dの状態の後に、掘削孔30に異なる振動掘削用ロッド23aを挿入し、更に、振動掘削用ロッド23aの上端に連結ロッド22を連結し、再び振動掘削を行う。
【0025】
また、振動掘削用ロッド23の下端が、海底岩盤層Nに達したことの判定は、事前に物理探査等で推定した海底堆積層Mの深さから行うことができる。または、振動掘削用ロッド23による掘削速度が、予め定めた値よりも遅くなった場合に、海底岩盤層Nに達したと判定するように構成してもよい。
【0026】
図3に、海底岩盤層Nのサンプリングの様子を示す。海底堆積層Mのサンプリング終了後、バイブロコアラー2をドリルヘッド3に切り替える。掘削孔30に回転掘削用ロッド21を挿入し、更に、回転掘削用ロッド21の上端に連結ロッド22を連結する(図3E参照)。このとき、回転掘削用ロッド21にインナーチューブ26を挿入しておき、ワイヤラインコアサンプリングを行う構成とすることが望ましい。
【0027】
回転掘削用ロッド21に、ドリルヘッド3で回転を加える。この回転により、回転掘削用ロッド21は、岩盤層Nを掘削しながら、コア31をインナーチューブ26内に取り込む。このとき、掘削の進展に伴いエレベータ5は、ドリルヘッド3を降下していく(図3F参照)。ワイヤラインコアサンプルリングの場合は、コア31を十分に採取したインナーチューブ26を、ワイヤ等でボーリングマシン1に引き上げる(図3G参照)。このインナーチューブ26を、マガジン20に収納する。新たなインナーチューブ26を、回転掘削用ロッド21に送り込み、その後新たな連結ロッド22を連結し、更に掘削を進めていく(図3H参照)。
【0028】
なお、海底でのボーリング作業が終了した後に、掘削孔30の内部に筒状のケーシングを挿入し、掘削孔30を再利用できるように維持してもよい。具体的には、地震計や温度計等を掘削孔30内に設置して利用することができる。このケーシングはマガジン20に搭載しておくことができる。
【0029】
上記の構成により、ボーリングマシン1は、海底堆積層M及び海底岩盤層Nの連続的なボーリングを実現することができる。特に、海面下1000m〜3000m、又は3000m以上の海底でボーリングを行う場合は、ボーリングマシン1を作業船上に引上げるこ
となく、連続的なボーリングをすることができるため、作業効率を飛躍的に向上することができる。
【0030】
ここで、ワイヤラインサンプリングを行わず、回転掘削用ロッド21の代わりに、コア回収用のコアチューブを利用して、コア31の採取を行うように構成してもよい。ただし、サンプリングを行う深度が、例えば30〜50m又は50m以上と深い場合は、ワイヤラインサンプリングの方が効率がよい。
【0031】
以上の手順で、海底のボーリングを行う。なお、マガジン20に交換用の回転掘削用ロッド21を複数本搭載してもよい。また、ボーリングマシン1がスラスター等で移動し、1回の沈降で、複数個所のボーリングを行うように構成することもできる。この構成により、ボーリングマシン1を作業船から海底へ沈降させる作業が少なくなり、ボーリング作業の効率を向上することができる。このとき、複数の堆積層Mのサンプルを採取するために、マガジン20に複数の振動掘削用ロッド23を複数本搭載してもよい。
【0032】
図4に、エレベータ5及びマガジン20の具体的な構成を示す。エレベータ5は、切替機構7を介して設置したバイブロコアラー2及びドリルヘッド3を有している。また、連結ロッド22等を連結及び連結解除するためのロッドホルダ6を有している。マガジン20は、楕円状に複数の連結ロッド22及びインナーチューブ26を並べて収納している。
【0033】
また、マガジン20は、エレベータ5との間で、連結ロッド22等を受け渡しする運搬アーム9を有している。ここで、連結ロッド22等の大きさは、任意に決定することができるが、例えば直径を70〜110mm程度、長さを1500mm〜3000mm程度とすることができる。なお、このとき、ボーリングマシン1は、底面を4000mm×4000mm程度、高さを6000mm程度となる。
【0034】
次に、エレベータ5及びマガジン20の動作について説明する。まず、マガジン20に収納している連結ロッド22等を、運搬アーム9でドリルヘッド3に連結する。なお、ドリルヘッド3は、下面部にチャックを有しており、連結ロッド22等を把持できるように構成している。
【0035】
次に、掘削作業の進展に伴いドリルヘッド3は、エレベータ5により降下する。ドリルヘッド3がほぼ最下端に達したところで、ロッドホルダ6で連結ロッド22等を把持し、連結ロッド22等とドリルヘッド3の連結を解除する。その後、ドリルヘッド3を上昇させ、運搬アーム9で新たな連結ロッド22等をロッドホルダ6の上部に供給する。
【0036】
ロッドホルダ6は、内臓したねじきり装置を作動し、把持している連結ロッド22等を新たな連結ロッド22等に螺合する。新たな連結ロッド22等の上端を、ドリルヘッド3で把持し、掘削を再開する。このとき、マガジン20は、回転しながら、順次、連結ロッド22等を運搬アーム9に供給し、また、回収することができる。
【0037】
図5に、切替機構7に設置したバイブロコアラー2及びドリルヘッド3を示す。切替機構7は、エレベータ5に昇降自在に設置した昇降用基板10と、昇降用基板10に沿ってスライド可能に設置した切替用基板(以下、スライド板11という)と、スライド板11に動力を加える油圧シリンダ12を有している。このスライド板11に、バイブロコアラー2及びドリルヘッド3を固定している。
【0038】
なお、Sは掘削孔中心線を示しており、この延長線上に連結ロッド22等があり、また、ロッドホルダ6の中心がある。つまり、図5Aは、ドリルヘッド3を使用し、回転掘削を行っている場合を示しており、図5Bは、バイブロコアラー2を使用し、振動掘削を行っている場合を示している。ここで、油圧シリンダ12の他の機構により、スライド板11を移動するように構成することもできる。ただし、水圧の高い海底で安定的に動作する必要があるため、油圧機構を利用することが望ましい。
【0039】
ここで、バイブロコアラー2は、振動を伝達しない又は減衰する機構を介して、スライド板11に設置することが望ましい。具体的には、例えば防振ゴム、及び免振装置等を利用することができる。この構成により、バイブロコアラー2の振動が、他の機器、特にドリルヘッド3に伝わりにくいため、機器の故障を防止することができる。例えば、水面下3000m以上の海底で、ボーリングを行う場合は、ボーリングマシン1の修理に多大な時間とコストが必要となる。
【0040】
また、バイブロコアラー2とドリルヘッド3を鉛直方向に配置しないことが望ましい。更に望ましくは、図5に示す様に水平方向に配置する。これは、バイブロコアラー2で発生した鉛直方向の振動が、ドリルヘッド3に伝わり、故障の原因となることを防止するためである。
【0041】
図6に、バイブロコアラー2の1例の透視図を示す。バイブロコアラー2は、おもり部(以下、リアクションマス24という)と、バネ機構25と、連結ロッド22等を把持するチャック27を有している。バネ機構25で発生する鉛直方向の振動により、リアクションマス24が振動し、この振動により、振動掘削用ロッド23で堆積層Mを掘削していく。なお、バネ機構25は、例えば皿バネ等を利用することができる。また、リアクションマス24は、例えば100〜300kg程度に構成するとよい。
【0042】
図7に、振動掘削用ロッド23の先端部に設置する蓋体28の1例の透視図を示す。蓋体28は、円板状の平板に、中心から外周方向に向かって複数の切込みを入れたような形状に形成している。この蓋体28は、例えば、ある程度の柔軟性を有する金属製薄板又は合成樹脂製の平板等で形成することができる。蓋体28は、下方から侵入してくる海底堆積層Mのコアを通過させ、一旦、蓋体28を通過したコアを下方に戻さないように構成している。
【0043】
この構成により、振動掘削用ロッド23は、海底岩盤層Nに比べて、比較的軟弱な海底堆積層Mのコアを、振動掘削用ロッド23内に収納し、且つ、外部(下方)に漏らさないため、海底堆積層Mのコアを採取することができる。なお、蓋体28は、上記の構成の他に、例えば、スライド板で振動掘削用ロッド23の下端部を閉止するシャッター方式や、クラブバケットのように、振動掘削用ロッド23の下端部の左右から回転運動により蓋体28を移動させて閉止する方式等を採用することができる。ここで、蓋体28は、軟弱な海底堆積層Mを下方に漏らさない構造であれば、上記以外の構造も採用することができる。
【符号の説明】
【0044】
1 海底ボーリングマシン(ボーリングマシン)
2 振動装置(バイブロコアラー)
3 ドリルヘッド
4 枠体(フレーム)
5 昇降機構(エレベータ)
7 切替機構
10 昇降用基板
11 切替用基板(スライド板)
20 収納部(マガジン)
21 回転掘削用ロッド
22 連結ロッド
23 振動掘削用ロッド
28 蓋体
M 海底堆積層
N 海底岩盤層
【特許請求の範囲】
【請求項1】
昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有した海底ボーリングマシンにおいて、
前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成したことを特徴とする海底ボーリングマシン。
【請求項2】
海底堆積層のサンプルを採取する場合、前記振動装置に前記振動掘削用ロッドを接続し、前記海底堆積層を掘削する制御を行い、海底岩盤層のサンプルを取得する場合、前記切替機構により、前記振動装置と前記ドリルヘッドを切り替え、前記ドリルヘッドに前記回転掘削用ロッドを接続し、前記海底岩盤層を掘削する制御を行うように構成したことを特徴とする請求項1に記載の海底ボーリングマシン。
【請求項3】
前記振動掘削用ロッドの下端部に蓋体を設置したことを特徴とする請求項1又は2に記載の海底ボーリングマシン。
【請求項4】
昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有し、
前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成した海底ボーリングマシンの制御方法であって、
海底堆積層の試料を取得する場合、
前記振動装置を掘削孔中心線上に配置する切替ステップと、
前記振動装置に前記振動掘削用ロッドを連結するステップと、
前記振動装置を振動し、且つ前記昇降装置を降下して前記海底堆積層を掘削するステップと、
前記振動用掘削ロッドを前記収納部内に回収する試料回収ステップを有し、
前記海底岩盤層の試料を取得する場合、
前記ドリルヘッドを掘削孔中心線上に配置する切替ステップと、
前記ドリルヘッドに前記回転掘削用ロッドを連結するステップと、
前記ドリルヘッドを回転し、且つ前記昇降機構を降下して前記海底岩盤層を掘削するステップと、
前記海底岩盤層の試料を回収するステップを有したことを特徴とする海底ボーリングマシンの制御方法。
【請求項1】
昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有した海底ボーリングマシンにおいて、
前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成したことを特徴とする海底ボーリングマシン。
【請求項2】
海底堆積層のサンプルを採取する場合、前記振動装置に前記振動掘削用ロッドを接続し、前記海底堆積層を掘削する制御を行い、海底岩盤層のサンプルを取得する場合、前記切替機構により、前記振動装置と前記ドリルヘッドを切り替え、前記ドリルヘッドに前記回転掘削用ロッドを接続し、前記海底岩盤層を掘削する制御を行うように構成したことを特徴とする請求項1に記載の海底ボーリングマシン。
【請求項3】
前記振動掘削用ロッドの下端部に蓋体を設置したことを特徴とする請求項1又は2に記載の海底ボーリングマシン。
【請求項4】
昇降機構を介して昇降自在に設置したドリルヘッドと、先端に地盤を環状に掘削するビットを有する回転掘削用ロッドと、前記回転掘削用ロッドに順次連結する連結ロッドと、前記連結ロッドを収納する収納部を有し、
前記昇降機構に切替機構を設置し、前記切替機構に前記ドリルヘッド及び振動装置を設置し、前記振動装置と着脱自在な振動掘削用ロッドを有し、前記切替機構が前記ドリルヘッドと前記振動装置の位置の切替を行うように構成した海底ボーリングマシンの制御方法であって、
海底堆積層の試料を取得する場合、
前記振動装置を掘削孔中心線上に配置する切替ステップと、
前記振動装置に前記振動掘削用ロッドを連結するステップと、
前記振動装置を振動し、且つ前記昇降装置を降下して前記海底堆積層を掘削するステップと、
前記振動用掘削ロッドを前記収納部内に回収する試料回収ステップを有し、
前記海底岩盤層の試料を取得する場合、
前記ドリルヘッドを掘削孔中心線上に配置する切替ステップと、
前記ドリルヘッドに前記回転掘削用ロッドを連結するステップと、
前記ドリルヘッドを回転し、且つ前記昇降機構を降下して前記海底岩盤層を掘削するステップと、
前記海底岩盤層の試料を回収するステップを有したことを特徴とする海底ボーリングマシンの制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−226084(P2011−226084A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−94420(P2010−94420)
【出願日】平成22年4月15日(2010.4.15)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月15日(2010.4.15)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
[ Back to top ]