
海底生物採取機
【課題】平坦な海底はもとより、岩礁域及び石が多く点在する海底においても、効率良く、また、アワビ等の貝類を傷付ける事なく、ウニを採取することができる海底生物採取機を提供する。
【解決手段】海底生物採取機は、吸引装置20と、この吸引装置20内に設けられ周面にブラシが植設されたドラム28と、このドラム28をその中心軸の回りに回転させるモータ284と、船上に設置され吸引装置20を海底で移動可能に支持する支持部材30と、この支持部材30を介して吸引装置20を海底で移動させる駆動部材と、船上に設置された吸引ポンプ102と、吸引装置20と吸引ポンプ102との間に連結された吸引ホース106と、を有する。
【解決手段】海底生物採取機は、吸引装置20と、この吸引装置20内に設けられ周面にブラシが植設されたドラム28と、このドラム28をその中心軸の回りに回転させるモータ284と、船上に設置され吸引装置20を海底で移動可能に支持する支持部材30と、この支持部材30を介して吸引装置20を海底で移動させる駆動部材と、船上に設置された吸引ポンプ102と、吸引装置20と吸引ポンプ102との間に連結された吸引ホース106と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海底、特に岩礁等の起伏に富んだ場所に点在して生息するウニ等の海底生物を採取する海底生物採取機に関する。
【背景技術】
【0002】
現在、日本の全国各地の殆どの海岸及び浅瀬で、コンブ及びワカメ等の海中の海藻類が消失し、海底の岩の表面が白色又は紅色の石灰質の岩肌となる磯焼けが発生している。この磯焼けは、光合成を行うため海の生態系における極めて重要な存在となっている植物群を奪い、多くの魚類をはじめとする海生動物の生活の場及び産卵場を奪う。その結果として、海の生態系は大きな影響を受けることになる。
【0003】
磯焼けの原因には、内陸部の豪雨による出水で一気に真水が流れ込んで海水の塩分が低下する場合と、逆に干ばつによって塩分濃度の高い外洋の海水が沿岸に押し寄せてくる場合のような水質激変が考えられる。また、アワビ及びムラサキウニが海藻を餌とすることから、これらの食害も磯焼けの原因であるといわれている。そこで、この磯焼けの防止のための有効な手段として、ムラサキウニを採取して除去するか、採取して移植することが行われている。しかしながら、ウニを効率良く採取する方法の多くは、未だに手作業に頼っているのが現状であり、広範囲にわたり点在するウニを、安全且つ効率的に採取する技術の開発が求められている。
【0004】
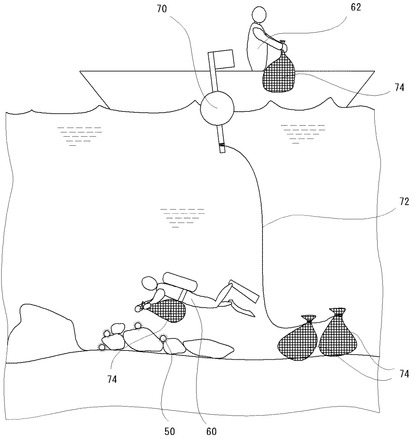
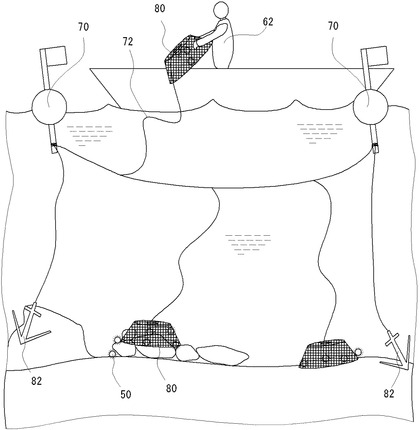
図6は、潜水士60の手作業によるウニ50の潜水採取を示す模式図である。図6に示すように、海面にフロート70が浮遊しており、フロート70に縄72の一端が接続されている。その縄72の他端には錘(図示せず)及び袋74が接続されている。
【0005】
具体的には、潜水士60は捕獲したウニ50を袋74に入れ、所定数捕獲後、袋74を縄72の他端に結びつける。次に、潜水士60は縄72を引き、フロート70を沈ませることで、船乗員62に合図を送り、袋74を引き上げてもらう。このようにして潜水士60の手作業による潜水採取は実施される。
【0006】
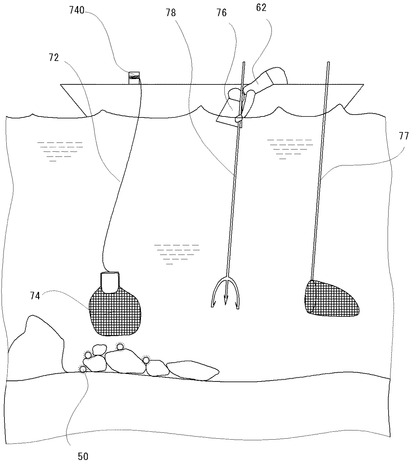
次に図7は、船乗員62の箱めがね76を用いた船上採取を示す模式図である。図7に示すように、使用する漁具は箱めがね76及びタモ網77、又は箱めがね76、ヤス78、挟み棒(図示せず)及び袋(又はカゴ)74を用いる。箱めがね76は主にプラスチックで形成される筒体と、その筒体の底面に取り付けられたガラス板とで構成される。タモ網77及びヤス78は海底まで届く程度の柄を有する。袋74は船に設けられた支持部740と縄72で連結され、錘(図示せず)によって海中に沈められている。
【0007】
具体的には、船乗員62は箱めがね76を用いて海底を監視し、ウニ50を発見すると、タモ網77又はヤス78を用いてウニ50を袋74に入れる。船乗員62は、ウニ50を所定数捕獲後、袋74を引き上げる。このようにして船上採取は実施される。
【0008】
次に図8は、カゴ80を用いた採取を示す模式図である。図8に示すように、カゴ80が縄72を介して、2個のフロート70及び錨82と接続されている。フロート70及び錨82によって、カゴ80を仕掛けるポイントが固定される。カゴ80の内部には、昆布等の海藻(図示せず)が入れられている。
【0009】
具体的には、海藻等によって誘き寄せられたウニ50は、カゴ80内設けられたカエシ等の仕掛けによって抜け出せなくなる。カゴ80を設置して一定期間過ぎた後、カゴ80を引き上げることでウニ50を採取する。このようにしてカゴ80を用いた採取がなされる。
【0010】
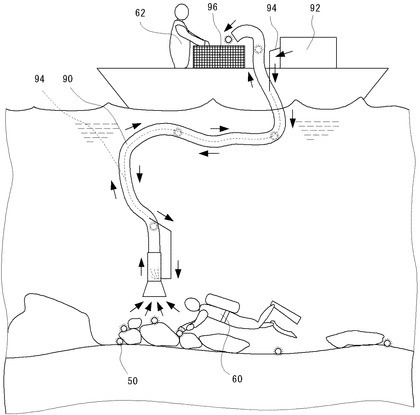
図9は、圧縮空気を用いたウニ50の採取機を示す模式図である。図9に示すように、この採取機は、船上から海底に向けてウニ50を導くホース90を浸漬し、船上に設置されたコンプレッサ92からチューブ94を介して圧縮空気をホース90の下端部に向けて供給して、この圧縮空気による海水の上昇流をホース90内に生成する。そして、潜水士60が回転のウニ50を採取して、ホース90の下端部からウニ50をホース90内に入れると、海水及び空気の上昇流にのってウニ50が船上に運ばれ、採取カゴ96内に集められる。
【0011】
また、他の方法としては、海底生物を掻き出すための爪を有する金属製の採取装置を引っ張り、更にポンプを用いて海底の物(ウニ等)に海水を放出することによって、その採取装置内へ送りこみ、捕獲する方法がある(特許文献1参照)。
【0012】
【特許文献1】登録実用新案第3064820号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
しかしながら、従来の技術では以下のような問題点がある。図6に示す潜水採取方法において、潜水士60の手作業による採取は、ウニ50のとげ(触手)によって手袋及び潜水スーツを傷めてしまうために好ましくない。更に、大量のウニ50を捕獲するためには、多くの潜水士60を必要とし効率的ではない。
【0014】
図7に示す箱めがね76及びタモ網77又はヤス78を用いた採取方法では、船上から海中を覗くため視界が限られ、岩陰に潜むウニ50まで視認し、採取することはできない。また、熟練を要するため、万人ができる作業ではなく、効率的でもない。
【0015】
図8に示すカゴ80を用いた採取方法では、透明度の低い場所や、多少波のある場所でも実施できるという利点はあるが、カゴ80周辺のみに生息するウニ50しか採取出来ず、非常に時間がかかり、広範囲の採取には不向きである。
【0016】
図9に示すホース90内に圧縮空気を噴出させて行う採取方法では、潜水士60がホース90を使用してウニ50を船上に送るには、海中でホース90の吸引口を持ち運ばなければならない。その効率は、図6に示す潜水採取法とほとんど変わらず、効率的ではない。
【0017】
特許文献1に示す金属製のカゴを引っ張り、海底の物を捕獲する方法では、比較的平坦な地形では採取が可能であるが、ウニ50の多くは起伏に富んだ岩礁域及び石が多く点在するところに生息するため、使用範囲が限定される。更には、爪によって、アワビ等の貝類を傷つけてしまう。
【0018】
本発明はかかる問題点に鑑みてなされたものであり、平坦な海底はもとより、岩礁域及び石が多く点在する海底においても、効率良く、また、アワビ等の貝類を傷付ける事なく、ウニを採取することができる海底生物採取機を提供することを目的とする。
【課題を解決するための手段】
【0019】
本発明に係る海底生物採取機は、底部が開口したハウジングと、このハウジング内に設けられ周面にブラシが植設されたドラムと、このドラムをその中心軸の回りに回転させるモータと、船上に設置され前記ハウジングを海底で移動可能に支持する支持部材と、この支持部材を介して前記ハウジングを海底で移動させる駆動部材と、船上に設置された吸引ポンプと、前記ハウジングと前記吸引ポンプとの間に連結された吸引ホースと、を有することを特徴とする。
【0020】
なお、前記支持部材は、船上に固定された支持部と、この支持部に対して回転する旋回部と、この旋回部に取り付けられ前記旋回部に対して上下に揺動する基端側アームと、この基端側アームに縦続で連結され各連結部で相互に揺動可能の1又は複数個の移動アームと、を有することが好ましい。
【0021】
更に、前記ハウジングは、前記移動アームにおける最も先端側の移動アームの先端にワイヤにより吊り下げられることが好ましい。
【0022】
また、前記移動アームのうち少なくとも1個は、伸縮させることができるようすることが好ましい。
【0023】
また、前記ドラムは、1対がその回転中心を相互に平行にしその対向方向を前記ハウジングの底部に平行にして設置されており、前記駆動部材は、前記ドラムの回転中心軸に平行な方向に前記ハウジングを移動させるようにしてもよい。
【0024】
更に、前記ハウジング内における前記ドラムよりも外方の位置には、前記ブラシにより掻き取られた海底生物を前記ハウジングにおける前記吸引ホースとの連結位置に向けて導く水流を生起させる噴射ノズルが設置されており、前記船上には噴射ポンプが設置され、前記噴射ポンプと前記噴射ノズルとは噴射ホースにより連結されているようにしてもよい。
【0025】
更に、前記ハウジングにおける移動方向の側方の側壁には、この側壁から延出するように弾性板が前記側壁に平行に取り付けられていることが好ましい。
【0026】
また、前記吸引ホース及び前記噴射ホースは、可撓性を有するようにしてもよい。
【発明の効果】
【0027】
本発明によれば、平坦な海底はもとより、岩礁域及び石が多く点在する海底においても、効率良く、また、アワビ等の貝類を傷付ける事なく、ウニを採取することができる。
【発明を実施するための最良の形態】
【0028】
以下、本発明の実施の形態について添付の図面を参照して具体的に説明する。
【0029】
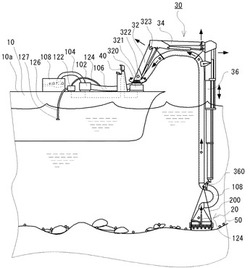
図1は本発明の実施形態に係る海底生物採取機を備えた船舶を示す模式図である。図1に示すように、本実施形態に係る船舶は、船体10の甲板10a上に吸引ポンプ102を備える。吸引ポンプ102に排出ホース104及び吸引ホース106が接続されている。排出ホース104及び吸引ホース106は、ゴム、プラスチック等の可撓材料からなる。排出ホース104の開放端側の先には、ウニ50と海水とを分別する分別機108が設けられている。吸引ホース106は、海底まで届くのに十分な長さを備え、吸引ホース106の海中側の先端には吸引装置20が接続されている。吸引装置20は、ワイヤ200により懸架されて支持部材30に揺動可能に支持されている。
【0030】
支持部材30の支持部320は、船体10の前部の甲板10a上に固定されている。この支持部320には、旋回部321が垂直軸の周りに回転可能に支持されており、これにより、旋回部321は垂直軸の周りに旋回する。この旋回部321には、基端側アーム32がその一方の端部(基端部)で水平の回転軸322を介して回転可能に連結されており、これにより、基端側アーム32は垂直方向に揺動することができる。また、移動アーム34はその一方の端部(基端部)が基端側アーム32の他方の端部(先端部)に水平の回転軸323を介して回転可能に連結されており、これにより、移動アーム34は基端側アーム32に対して垂直方向に揺動することができる。また、他の移動アーム36は、その一方の端部(基端部)が移動アーム34の先端部に水平の回転軸(図示せず)を介して回転可能に連結されており、これにより、移動アーム36は移動アーム34に対して垂直方向に揺動することができる。更に、この移動アーム36は伸縮することができ、その長さを変更することができる。なお、以下、基端側アーム32を第1アームといい、移動アーム34を第2アームといい、移動アーム36を第3アームという。
【0031】
第1アーム32の基端側と第2アーム34の基端側、及び第2アーム34の基端側と第3アーム36の基端側には夫々駆動部材である油圧シリンダが接続されている。第3アーム36は、3本の油圧シリンダと接続され、長手方向(鉛直方向)に伸縮自在に構成されている。更に第3アーム36の先端部にU字状の支持金具360が上下に揺動可能に支持されている。第2アーム34及び第3アーム36は油圧シリンダの油圧によって、起伏可能であり、更に第3アーム36は伸縮可能である。これによって、支持部材30の最先端側の第3アーム36の先端の支持金具360にワイヤ200を介して懸架された吸引装置20を、鉛直及び水平方向に広く移動させることができ、更に支持金具360を上下に揺動させることによって、吸引装置20の位置の微調整ができる。なお、これらの動作は制御部40によって制御される。
【0032】
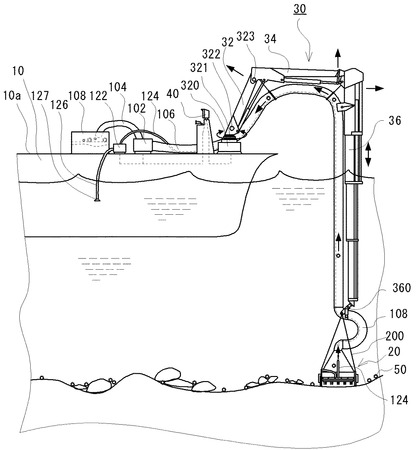
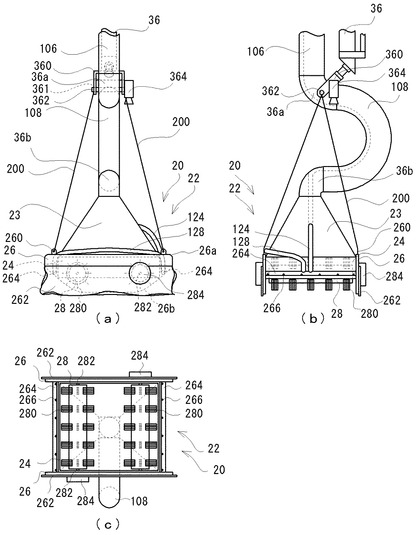
図2(a)は、本発明の実施形態に係る吸引装置20の詳細な構成を示す正面図、図2(b)は、本発明の実施形態に係る吸引装置20の詳細な構成を示す側面図、図2(c)は、本発明の実施形態に係る吸引装置20の詳細な構成を示す底面図である。図3は、本発明の実施形態に係る吸引装置20の模式的な斜面図である。図2及び3に示すように、吸引ホース106に、第1エルボ36aの一端が接続されている。また、第3アーム36の先端に、U字状の支持金具360が接続され、この支持金具360の両端に孔361が設けられている。第1エルボ36aは、この孔361に設けられた支持シャフト362に挿通支持されている。これによって、第1エルボ36aに接続された吸引ホース106は、支持金具360を介して、第3アーム36によって支持されることとなる。第1エルボ36aの他端には、吸引ホース106を曲折させた曲折ホース108の一端が接続されている。曲折ホース108の他端には第2エルボ36bが接続され、この第2エルボ36bに吸引装置20のハウジング22が接続されている。
【0033】
次に、吸引装置20について説明する。吸引装置20は、主にハウジング22、フレーム26、スカート262及びドラム28から構成される。まず、ハウジング22は底部が開口した形状を有し、上部ハウジング23及び下部ハウジング24から構成される。この上部ハウジング23は、中空の切頭四角錘状をなし、正方形断面である頂部に、第2エルボ36bが接続される。上部ハウジング23の下端に、筒状の下部ハウジング24が設けられている。
【0034】
下部ハウジング24は、4枚の矩形板の側縁を結合した筒状形状を有し、上部ハウジング23の下端に鉛直下方に延出するように配置されている。なお、上部ハウジング23及び下部ハウジング24は、一体的に成形されるものとしてもよい。また、ハウジングの移動方向の側方の側壁に該当する下部ハウジング24の一組の側壁の外側には、フレーム26が夫々前記側壁に平行に取り付けられている。
【0035】
フレーム26は下部ハウジング24の側壁と比較して一回り大きく形成されている。フレーム26の形状は長方形の板に対し、その上部の角26aに面取りを施し、下部の角26bに、上部の角26aと比べて放物線状に大径の曲率半径Rを設けたものである。これらの上部の角26a及び下部の角26bによって、フレーム26に平行に存在する海底障害物から吸引装置20が受ける衝撃を緩和することができる。また、フレーム26の上面の両端部には、ワイヤ200と接続されるワイヤ接続部260が備えられている。吸引装置20は、支持金具360の支持シャフト362からワイヤ接続部260に渡されたワイヤ200によって、四隅が吊り下げられており、ワイヤ200が撓むことにより、吸引装置20は海底で比較的自由な姿勢をとることができる。
【0036】
また、スカート262が、ハウジングの移動方向の側方の側壁から延出するように、前記側壁に平行に取り付けられている。即ち、スカート262は、合成ゴム等の弾性に富む材料から構成され、フレーム26の下面よりも下方に長く板状又はカーテン状に形成されている。スカート262によって、フレーム26に垂直に存在する海底障害物から吸引装置20が受ける衝撃を緩和することができる。
【0037】
下部ハウジング24内には、ドラム28が、フレーム26に対し垂直に、下部ハウジング24の底部に対し平行に対向するように2本設けられている。このドラム28の周面には合成樹脂等の繊維からなるブラシ280が所定数植設されている。このドラム28は、中心に回転軸282を備え、回転軸282は、下部ハウジング24を挿通し、回転可能にフレーム26に支持されている。また、フレーム26上にモータ284が連設され、回転軸282の一端と接続されている。このモータ284は、下部ハウジング24に対して対角に備えられ、ウニ50を下部ハウジング24の中心上方向に誘導するように、ドラム28を回転させる。
【0038】
次に、圧水噴射装置の構成について説明する。図1に示すように、本実施形態に係る船舶は、船体10の甲板10a上に噴射ポンプ122を備えている。噴射ポンプ122は噴射ホース124及び給水ホース126と接続されている。給水ホース126は端部を海中に配置され、その端部に海水吸入部127を有する。一方、噴射ホース124は吸引ホース106を沿うように内挿され、吸引装置20の上部ハウジング23から吸引装置20の外部に出され、噴射ノズル264の一部に接続されている(図2及び3参照)。
【0039】
図2に示すように、噴射ノズル264は、フレーム26と垂直に、下部ハウジング24の側面の外方に各1本ずつ設けられ、両端をフレーム26に固定されている。この2本の噴射ノズル264は、任意の一部で連結パイプ128によって連結されている。更に、この噴射ノズル264は所定数の噴射口266を有し、本実施形態に係る噴射口266は、水平面と45度の角度で下部ハウジング24の内向き及び下向き(海底向き)に備えられている。
【0040】
このように構成された圧水噴射装置においては、噴射ポンプ122が、給水ホース126から海水を吸い上げ、その海水(以下、圧水と記載)を噴射ホース124内に送出する。その圧水は2本の噴射ノズル264に至り、噴射口266から噴射される。噴射された圧水は、下部ハウジング24の中心の上部ハウジング23方向にウニ50を巻き上げる。なお、噴射ポンプ122の動作は制御部40によって制御される。
【0041】
次に、本実施形態の海底生物採取機の動作について説明する。噴射口266から噴射された圧水及びドラム28のブラシによって、海底に潜むウニ50を海底より剥離する。このとき圧水は、スカート262によって両側への流出が遮られていることによって、フレーム26の中心下方に集中して噴射される。更に、吸引装置20が左右に振れたときにおいても、スカート262によって、噴射された圧水への他の海水からの干渉を軽減することができる。次に、圧水及び回転するドラム28が、剥離されたウニ50を上部中心に位置する第2エルボ36bへ導く。
【0042】
次に、船上への移送は、吸引ポンプ102によって発生する負圧が、ウニ50を上部ハウジング23の上方に位置する第2エルボ36bへ導き、吸引ホース106内に引き込み、船上へ吸引することでなされる。なお、吸引ポンプ102及びモータ284の動作は制御部40によって制御される。
【0043】
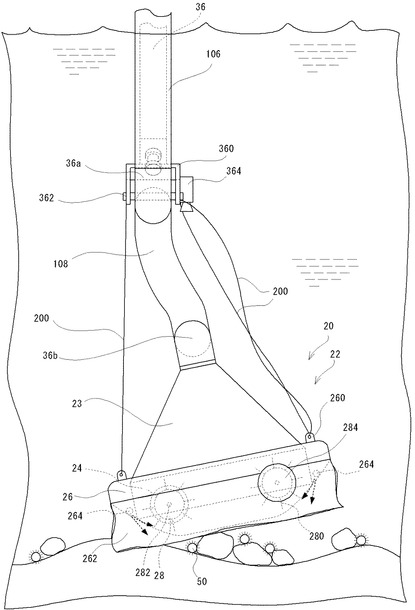
次に、本実施形態に係る海底生物採取機の吸引装置20の各場面における状態について説明する。図4は、フレーム26に対して平行方向に位置する障害物(図面上では岩)と接触したときの吸引装置20の状態を示す図である。ワイヤ200の夫々が吸引装置20の傾きに応じて緩んだり、張ったりすることで、ウニ50を吸引するのに好適な傾きとすることができる。更に、ワイヤ200の張力によって吸引装置20を安定な姿勢に復元することができる。また、放物線状に大径のRが設けられたフレーム26によって衝撃が緩和されている。
【0044】
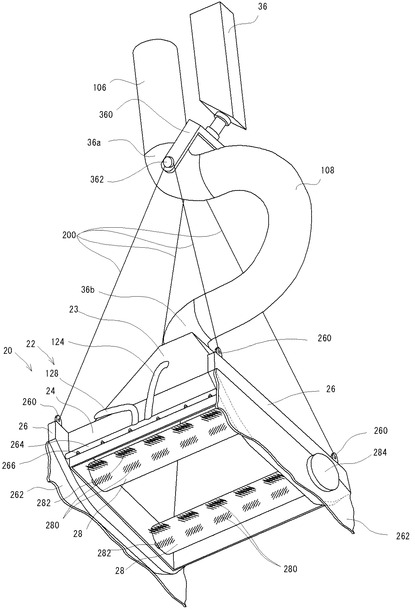
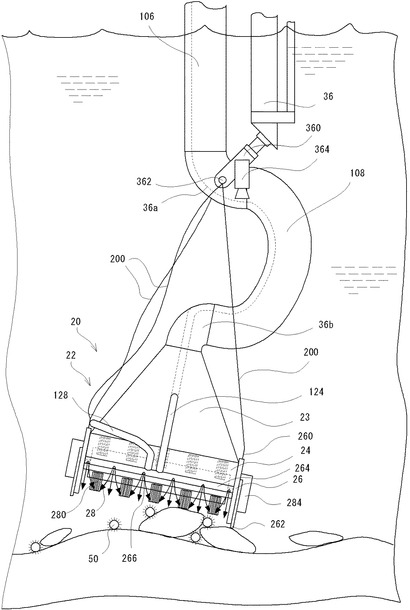
図5は、フレーム26に対して垂直方向に位置する障害物(図面上では岩)と接触したときの吸引装置20の状態を示す図である。ワイヤ200の夫々が吸引装置20の傾きに応じて緩んだり、張ったりすることで、ウニ50を吸引するのに好適な傾きとすることができる。更に、ワイヤ200の張力によって吸引装置を安定な姿勢に復元することができる。また、弾性に富む材料から構成されたスカート262により衝撃を緩和することができる。
【0045】
このように、吸引装置20が、ワイヤ200を介して支持部材30に揺動可能に支持されていることによって、岩礁域及び石が多く点在する海底においても、好適な姿勢に自律的に制御され、ウニ50を効率良く採取することができる。更には、鋭利な漁具を用いず、吸引ポンプ102による負圧、合成樹脂等の繊維からなるブラシ280を備えたドラム28の回転及び噴射ポンプ122による圧水噴射によってウニ50を捕獲するため、アワビ等の貝類を傷付けることなく採取作業を行うことができる。
【0046】
なお、噴射装置は噴射ポンプ122を用いて、噴射口206から圧水を噴射するとして説明したが、噴射ポンプ122をコンプレッサに置換し、圧縮空気を噴出するようにしてもよい。更には、噴射装置をファンに置き換え、水流を発生させるようにしてもよい。
【0047】
なお、本実施形態に係る吸引装置20のドラム28及び噴射ノズル264は2本に限定せず、複数でも構わない。
【0048】
更には、第2アーム(移動アーム)34を複数設け、吸引装置20を更に広範囲に移動可能にしてもよい。
【0049】
また、本実施形態に係る吸引装置20は、支持金具360の側面に、吸引装置20とその近傍を船上から視認できるように、下向きにモニターカメラ364を備えるようにしてもよい。
【図面の簡単な説明】
【0050】
【図1】本実施の形態に係る海底生物採取機の全体構成を示す模式的な平面図である。
【図2】本実施の形態に係る吸引装置の(a)は正面視の模式図である。(b)は側面視の模式図である。(c)は底面視の模式図である。
【図3】本実施の形態に係る吸引装置の模式的な斜面図である。
【図4】本実施の形態に係る吸引装置が障害物と接触した状態における正面視の模式図である。
【図5】本実施の形態に係る吸引装置が障害物と接触した状態における側面視の模式図である。
【図6】従来の手作業による海底生物の潜水採取を示す模式図である。
【図7】従来の箱めがねを用いた海底生物の船上採取を示す模式図である。
【図8】従来のカゴを用いた海底生物の潜水採取を示す模式図である。
【図9】従来の圧縮空気を用いた海底生物の採取機を示す模式図である。
【符号の説明】
【0051】
10 船体
102 吸引ポンプ
106 吸引ホース
122 噴射ポンプ
124 噴射ホース
20 吸引装置
22 ハウジング
23 上部ハウジング
24 下部ハウジング
26 フレーム
262 スカート(弾性板)
264 噴射ノズル
266 噴射口
28 ドラム
280 ブラシ
282 回転軸
284 モータ
30 支持部材
32 基端側アーム(第1アーム)
34 移動アーム(第2アーム)
36 移動アーム(第3アーム)
360 支持金具
364 モニターカメラ
40 制御部
50 ウニ(海底生物)
【技術分野】
【0001】
本発明は、海底、特に岩礁等の起伏に富んだ場所に点在して生息するウニ等の海底生物を採取する海底生物採取機に関する。
【背景技術】
【0002】
現在、日本の全国各地の殆どの海岸及び浅瀬で、コンブ及びワカメ等の海中の海藻類が消失し、海底の岩の表面が白色又は紅色の石灰質の岩肌となる磯焼けが発生している。この磯焼けは、光合成を行うため海の生態系における極めて重要な存在となっている植物群を奪い、多くの魚類をはじめとする海生動物の生活の場及び産卵場を奪う。その結果として、海の生態系は大きな影響を受けることになる。
【0003】
磯焼けの原因には、内陸部の豪雨による出水で一気に真水が流れ込んで海水の塩分が低下する場合と、逆に干ばつによって塩分濃度の高い外洋の海水が沿岸に押し寄せてくる場合のような水質激変が考えられる。また、アワビ及びムラサキウニが海藻を餌とすることから、これらの食害も磯焼けの原因であるといわれている。そこで、この磯焼けの防止のための有効な手段として、ムラサキウニを採取して除去するか、採取して移植することが行われている。しかしながら、ウニを効率良く採取する方法の多くは、未だに手作業に頼っているのが現状であり、広範囲にわたり点在するウニを、安全且つ効率的に採取する技術の開発が求められている。
【0004】
図6は、潜水士60の手作業によるウニ50の潜水採取を示す模式図である。図6に示すように、海面にフロート70が浮遊しており、フロート70に縄72の一端が接続されている。その縄72の他端には錘(図示せず)及び袋74が接続されている。
【0005】
具体的には、潜水士60は捕獲したウニ50を袋74に入れ、所定数捕獲後、袋74を縄72の他端に結びつける。次に、潜水士60は縄72を引き、フロート70を沈ませることで、船乗員62に合図を送り、袋74を引き上げてもらう。このようにして潜水士60の手作業による潜水採取は実施される。
【0006】
次に図7は、船乗員62の箱めがね76を用いた船上採取を示す模式図である。図7に示すように、使用する漁具は箱めがね76及びタモ網77、又は箱めがね76、ヤス78、挟み棒(図示せず)及び袋(又はカゴ)74を用いる。箱めがね76は主にプラスチックで形成される筒体と、その筒体の底面に取り付けられたガラス板とで構成される。タモ網77及びヤス78は海底まで届く程度の柄を有する。袋74は船に設けられた支持部740と縄72で連結され、錘(図示せず)によって海中に沈められている。
【0007】
具体的には、船乗員62は箱めがね76を用いて海底を監視し、ウニ50を発見すると、タモ網77又はヤス78を用いてウニ50を袋74に入れる。船乗員62は、ウニ50を所定数捕獲後、袋74を引き上げる。このようにして船上採取は実施される。
【0008】
次に図8は、カゴ80を用いた採取を示す模式図である。図8に示すように、カゴ80が縄72を介して、2個のフロート70及び錨82と接続されている。フロート70及び錨82によって、カゴ80を仕掛けるポイントが固定される。カゴ80の内部には、昆布等の海藻(図示せず)が入れられている。
【0009】
具体的には、海藻等によって誘き寄せられたウニ50は、カゴ80内設けられたカエシ等の仕掛けによって抜け出せなくなる。カゴ80を設置して一定期間過ぎた後、カゴ80を引き上げることでウニ50を採取する。このようにしてカゴ80を用いた採取がなされる。
【0010】
図9は、圧縮空気を用いたウニ50の採取機を示す模式図である。図9に示すように、この採取機は、船上から海底に向けてウニ50を導くホース90を浸漬し、船上に設置されたコンプレッサ92からチューブ94を介して圧縮空気をホース90の下端部に向けて供給して、この圧縮空気による海水の上昇流をホース90内に生成する。そして、潜水士60が回転のウニ50を採取して、ホース90の下端部からウニ50をホース90内に入れると、海水及び空気の上昇流にのってウニ50が船上に運ばれ、採取カゴ96内に集められる。
【0011】
また、他の方法としては、海底生物を掻き出すための爪を有する金属製の採取装置を引っ張り、更にポンプを用いて海底の物(ウニ等)に海水を放出することによって、その採取装置内へ送りこみ、捕獲する方法がある(特許文献1参照)。
【0012】
【特許文献1】登録実用新案第3064820号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
しかしながら、従来の技術では以下のような問題点がある。図6に示す潜水採取方法において、潜水士60の手作業による採取は、ウニ50のとげ(触手)によって手袋及び潜水スーツを傷めてしまうために好ましくない。更に、大量のウニ50を捕獲するためには、多くの潜水士60を必要とし効率的ではない。
【0014】
図7に示す箱めがね76及びタモ網77又はヤス78を用いた採取方法では、船上から海中を覗くため視界が限られ、岩陰に潜むウニ50まで視認し、採取することはできない。また、熟練を要するため、万人ができる作業ではなく、効率的でもない。
【0015】
図8に示すカゴ80を用いた採取方法では、透明度の低い場所や、多少波のある場所でも実施できるという利点はあるが、カゴ80周辺のみに生息するウニ50しか採取出来ず、非常に時間がかかり、広範囲の採取には不向きである。
【0016】
図9に示すホース90内に圧縮空気を噴出させて行う採取方法では、潜水士60がホース90を使用してウニ50を船上に送るには、海中でホース90の吸引口を持ち運ばなければならない。その効率は、図6に示す潜水採取法とほとんど変わらず、効率的ではない。
【0017】
特許文献1に示す金属製のカゴを引っ張り、海底の物を捕獲する方法では、比較的平坦な地形では採取が可能であるが、ウニ50の多くは起伏に富んだ岩礁域及び石が多く点在するところに生息するため、使用範囲が限定される。更には、爪によって、アワビ等の貝類を傷つけてしまう。
【0018】
本発明はかかる問題点に鑑みてなされたものであり、平坦な海底はもとより、岩礁域及び石が多く点在する海底においても、効率良く、また、アワビ等の貝類を傷付ける事なく、ウニを採取することができる海底生物採取機を提供することを目的とする。
【課題を解決するための手段】
【0019】
本発明に係る海底生物採取機は、底部が開口したハウジングと、このハウジング内に設けられ周面にブラシが植設されたドラムと、このドラムをその中心軸の回りに回転させるモータと、船上に設置され前記ハウジングを海底で移動可能に支持する支持部材と、この支持部材を介して前記ハウジングを海底で移動させる駆動部材と、船上に設置された吸引ポンプと、前記ハウジングと前記吸引ポンプとの間に連結された吸引ホースと、を有することを特徴とする。
【0020】
なお、前記支持部材は、船上に固定された支持部と、この支持部に対して回転する旋回部と、この旋回部に取り付けられ前記旋回部に対して上下に揺動する基端側アームと、この基端側アームに縦続で連結され各連結部で相互に揺動可能の1又は複数個の移動アームと、を有することが好ましい。
【0021】
更に、前記ハウジングは、前記移動アームにおける最も先端側の移動アームの先端にワイヤにより吊り下げられることが好ましい。
【0022】
また、前記移動アームのうち少なくとも1個は、伸縮させることができるようすることが好ましい。
【0023】
また、前記ドラムは、1対がその回転中心を相互に平行にしその対向方向を前記ハウジングの底部に平行にして設置されており、前記駆動部材は、前記ドラムの回転中心軸に平行な方向に前記ハウジングを移動させるようにしてもよい。
【0024】
更に、前記ハウジング内における前記ドラムよりも外方の位置には、前記ブラシにより掻き取られた海底生物を前記ハウジングにおける前記吸引ホースとの連結位置に向けて導く水流を生起させる噴射ノズルが設置されており、前記船上には噴射ポンプが設置され、前記噴射ポンプと前記噴射ノズルとは噴射ホースにより連結されているようにしてもよい。
【0025】
更に、前記ハウジングにおける移動方向の側方の側壁には、この側壁から延出するように弾性板が前記側壁に平行に取り付けられていることが好ましい。
【0026】
また、前記吸引ホース及び前記噴射ホースは、可撓性を有するようにしてもよい。
【発明の効果】
【0027】
本発明によれば、平坦な海底はもとより、岩礁域及び石が多く点在する海底においても、効率良く、また、アワビ等の貝類を傷付ける事なく、ウニを採取することができる。
【発明を実施するための最良の形態】
【0028】
以下、本発明の実施の形態について添付の図面を参照して具体的に説明する。
【0029】
図1は本発明の実施形態に係る海底生物採取機を備えた船舶を示す模式図である。図1に示すように、本実施形態に係る船舶は、船体10の甲板10a上に吸引ポンプ102を備える。吸引ポンプ102に排出ホース104及び吸引ホース106が接続されている。排出ホース104及び吸引ホース106は、ゴム、プラスチック等の可撓材料からなる。排出ホース104の開放端側の先には、ウニ50と海水とを分別する分別機108が設けられている。吸引ホース106は、海底まで届くのに十分な長さを備え、吸引ホース106の海中側の先端には吸引装置20が接続されている。吸引装置20は、ワイヤ200により懸架されて支持部材30に揺動可能に支持されている。
【0030】
支持部材30の支持部320は、船体10の前部の甲板10a上に固定されている。この支持部320には、旋回部321が垂直軸の周りに回転可能に支持されており、これにより、旋回部321は垂直軸の周りに旋回する。この旋回部321には、基端側アーム32がその一方の端部(基端部)で水平の回転軸322を介して回転可能に連結されており、これにより、基端側アーム32は垂直方向に揺動することができる。また、移動アーム34はその一方の端部(基端部)が基端側アーム32の他方の端部(先端部)に水平の回転軸323を介して回転可能に連結されており、これにより、移動アーム34は基端側アーム32に対して垂直方向に揺動することができる。また、他の移動アーム36は、その一方の端部(基端部)が移動アーム34の先端部に水平の回転軸(図示せず)を介して回転可能に連結されており、これにより、移動アーム36は移動アーム34に対して垂直方向に揺動することができる。更に、この移動アーム36は伸縮することができ、その長さを変更することができる。なお、以下、基端側アーム32を第1アームといい、移動アーム34を第2アームといい、移動アーム36を第3アームという。
【0031】
第1アーム32の基端側と第2アーム34の基端側、及び第2アーム34の基端側と第3アーム36の基端側には夫々駆動部材である油圧シリンダが接続されている。第3アーム36は、3本の油圧シリンダと接続され、長手方向(鉛直方向)に伸縮自在に構成されている。更に第3アーム36の先端部にU字状の支持金具360が上下に揺動可能に支持されている。第2アーム34及び第3アーム36は油圧シリンダの油圧によって、起伏可能であり、更に第3アーム36は伸縮可能である。これによって、支持部材30の最先端側の第3アーム36の先端の支持金具360にワイヤ200を介して懸架された吸引装置20を、鉛直及び水平方向に広く移動させることができ、更に支持金具360を上下に揺動させることによって、吸引装置20の位置の微調整ができる。なお、これらの動作は制御部40によって制御される。
【0032】
図2(a)は、本発明の実施形態に係る吸引装置20の詳細な構成を示す正面図、図2(b)は、本発明の実施形態に係る吸引装置20の詳細な構成を示す側面図、図2(c)は、本発明の実施形態に係る吸引装置20の詳細な構成を示す底面図である。図3は、本発明の実施形態に係る吸引装置20の模式的な斜面図である。図2及び3に示すように、吸引ホース106に、第1エルボ36aの一端が接続されている。また、第3アーム36の先端に、U字状の支持金具360が接続され、この支持金具360の両端に孔361が設けられている。第1エルボ36aは、この孔361に設けられた支持シャフト362に挿通支持されている。これによって、第1エルボ36aに接続された吸引ホース106は、支持金具360を介して、第3アーム36によって支持されることとなる。第1エルボ36aの他端には、吸引ホース106を曲折させた曲折ホース108の一端が接続されている。曲折ホース108の他端には第2エルボ36bが接続され、この第2エルボ36bに吸引装置20のハウジング22が接続されている。
【0033】
次に、吸引装置20について説明する。吸引装置20は、主にハウジング22、フレーム26、スカート262及びドラム28から構成される。まず、ハウジング22は底部が開口した形状を有し、上部ハウジング23及び下部ハウジング24から構成される。この上部ハウジング23は、中空の切頭四角錘状をなし、正方形断面である頂部に、第2エルボ36bが接続される。上部ハウジング23の下端に、筒状の下部ハウジング24が設けられている。
【0034】
下部ハウジング24は、4枚の矩形板の側縁を結合した筒状形状を有し、上部ハウジング23の下端に鉛直下方に延出するように配置されている。なお、上部ハウジング23及び下部ハウジング24は、一体的に成形されるものとしてもよい。また、ハウジングの移動方向の側方の側壁に該当する下部ハウジング24の一組の側壁の外側には、フレーム26が夫々前記側壁に平行に取り付けられている。
【0035】
フレーム26は下部ハウジング24の側壁と比較して一回り大きく形成されている。フレーム26の形状は長方形の板に対し、その上部の角26aに面取りを施し、下部の角26bに、上部の角26aと比べて放物線状に大径の曲率半径Rを設けたものである。これらの上部の角26a及び下部の角26bによって、フレーム26に平行に存在する海底障害物から吸引装置20が受ける衝撃を緩和することができる。また、フレーム26の上面の両端部には、ワイヤ200と接続されるワイヤ接続部260が備えられている。吸引装置20は、支持金具360の支持シャフト362からワイヤ接続部260に渡されたワイヤ200によって、四隅が吊り下げられており、ワイヤ200が撓むことにより、吸引装置20は海底で比較的自由な姿勢をとることができる。
【0036】
また、スカート262が、ハウジングの移動方向の側方の側壁から延出するように、前記側壁に平行に取り付けられている。即ち、スカート262は、合成ゴム等の弾性に富む材料から構成され、フレーム26の下面よりも下方に長く板状又はカーテン状に形成されている。スカート262によって、フレーム26に垂直に存在する海底障害物から吸引装置20が受ける衝撃を緩和することができる。
【0037】
下部ハウジング24内には、ドラム28が、フレーム26に対し垂直に、下部ハウジング24の底部に対し平行に対向するように2本設けられている。このドラム28の周面には合成樹脂等の繊維からなるブラシ280が所定数植設されている。このドラム28は、中心に回転軸282を備え、回転軸282は、下部ハウジング24を挿通し、回転可能にフレーム26に支持されている。また、フレーム26上にモータ284が連設され、回転軸282の一端と接続されている。このモータ284は、下部ハウジング24に対して対角に備えられ、ウニ50を下部ハウジング24の中心上方向に誘導するように、ドラム28を回転させる。
【0038】
次に、圧水噴射装置の構成について説明する。図1に示すように、本実施形態に係る船舶は、船体10の甲板10a上に噴射ポンプ122を備えている。噴射ポンプ122は噴射ホース124及び給水ホース126と接続されている。給水ホース126は端部を海中に配置され、その端部に海水吸入部127を有する。一方、噴射ホース124は吸引ホース106を沿うように内挿され、吸引装置20の上部ハウジング23から吸引装置20の外部に出され、噴射ノズル264の一部に接続されている(図2及び3参照)。
【0039】
図2に示すように、噴射ノズル264は、フレーム26と垂直に、下部ハウジング24の側面の外方に各1本ずつ設けられ、両端をフレーム26に固定されている。この2本の噴射ノズル264は、任意の一部で連結パイプ128によって連結されている。更に、この噴射ノズル264は所定数の噴射口266を有し、本実施形態に係る噴射口266は、水平面と45度の角度で下部ハウジング24の内向き及び下向き(海底向き)に備えられている。
【0040】
このように構成された圧水噴射装置においては、噴射ポンプ122が、給水ホース126から海水を吸い上げ、その海水(以下、圧水と記載)を噴射ホース124内に送出する。その圧水は2本の噴射ノズル264に至り、噴射口266から噴射される。噴射された圧水は、下部ハウジング24の中心の上部ハウジング23方向にウニ50を巻き上げる。なお、噴射ポンプ122の動作は制御部40によって制御される。
【0041】
次に、本実施形態の海底生物採取機の動作について説明する。噴射口266から噴射された圧水及びドラム28のブラシによって、海底に潜むウニ50を海底より剥離する。このとき圧水は、スカート262によって両側への流出が遮られていることによって、フレーム26の中心下方に集中して噴射される。更に、吸引装置20が左右に振れたときにおいても、スカート262によって、噴射された圧水への他の海水からの干渉を軽減することができる。次に、圧水及び回転するドラム28が、剥離されたウニ50を上部中心に位置する第2エルボ36bへ導く。
【0042】
次に、船上への移送は、吸引ポンプ102によって発生する負圧が、ウニ50を上部ハウジング23の上方に位置する第2エルボ36bへ導き、吸引ホース106内に引き込み、船上へ吸引することでなされる。なお、吸引ポンプ102及びモータ284の動作は制御部40によって制御される。
【0043】
次に、本実施形態に係る海底生物採取機の吸引装置20の各場面における状態について説明する。図4は、フレーム26に対して平行方向に位置する障害物(図面上では岩)と接触したときの吸引装置20の状態を示す図である。ワイヤ200の夫々が吸引装置20の傾きに応じて緩んだり、張ったりすることで、ウニ50を吸引するのに好適な傾きとすることができる。更に、ワイヤ200の張力によって吸引装置20を安定な姿勢に復元することができる。また、放物線状に大径のRが設けられたフレーム26によって衝撃が緩和されている。
【0044】
図5は、フレーム26に対して垂直方向に位置する障害物(図面上では岩)と接触したときの吸引装置20の状態を示す図である。ワイヤ200の夫々が吸引装置20の傾きに応じて緩んだり、張ったりすることで、ウニ50を吸引するのに好適な傾きとすることができる。更に、ワイヤ200の張力によって吸引装置を安定な姿勢に復元することができる。また、弾性に富む材料から構成されたスカート262により衝撃を緩和することができる。
【0045】
このように、吸引装置20が、ワイヤ200を介して支持部材30に揺動可能に支持されていることによって、岩礁域及び石が多く点在する海底においても、好適な姿勢に自律的に制御され、ウニ50を効率良く採取することができる。更には、鋭利な漁具を用いず、吸引ポンプ102による負圧、合成樹脂等の繊維からなるブラシ280を備えたドラム28の回転及び噴射ポンプ122による圧水噴射によってウニ50を捕獲するため、アワビ等の貝類を傷付けることなく採取作業を行うことができる。
【0046】
なお、噴射装置は噴射ポンプ122を用いて、噴射口206から圧水を噴射するとして説明したが、噴射ポンプ122をコンプレッサに置換し、圧縮空気を噴出するようにしてもよい。更には、噴射装置をファンに置き換え、水流を発生させるようにしてもよい。
【0047】
なお、本実施形態に係る吸引装置20のドラム28及び噴射ノズル264は2本に限定せず、複数でも構わない。
【0048】
更には、第2アーム(移動アーム)34を複数設け、吸引装置20を更に広範囲に移動可能にしてもよい。
【0049】
また、本実施形態に係る吸引装置20は、支持金具360の側面に、吸引装置20とその近傍を船上から視認できるように、下向きにモニターカメラ364を備えるようにしてもよい。
【図面の簡単な説明】
【0050】
【図1】本実施の形態に係る海底生物採取機の全体構成を示す模式的な平面図である。
【図2】本実施の形態に係る吸引装置の(a)は正面視の模式図である。(b)は側面視の模式図である。(c)は底面視の模式図である。
【図3】本実施の形態に係る吸引装置の模式的な斜面図である。
【図4】本実施の形態に係る吸引装置が障害物と接触した状態における正面視の模式図である。
【図5】本実施の形態に係る吸引装置が障害物と接触した状態における側面視の模式図である。
【図6】従来の手作業による海底生物の潜水採取を示す模式図である。
【図7】従来の箱めがねを用いた海底生物の船上採取を示す模式図である。
【図8】従来のカゴを用いた海底生物の潜水採取を示す模式図である。
【図9】従来の圧縮空気を用いた海底生物の採取機を示す模式図である。
【符号の説明】
【0051】
10 船体
102 吸引ポンプ
106 吸引ホース
122 噴射ポンプ
124 噴射ホース
20 吸引装置
22 ハウジング
23 上部ハウジング
24 下部ハウジング
26 フレーム
262 スカート(弾性板)
264 噴射ノズル
266 噴射口
28 ドラム
280 ブラシ
282 回転軸
284 モータ
30 支持部材
32 基端側アーム(第1アーム)
34 移動アーム(第2アーム)
36 移動アーム(第3アーム)
360 支持金具
364 モニターカメラ
40 制御部
50 ウニ(海底生物)
【特許請求の範囲】
【請求項1】
底部が開口したハウジングと、このハウジング内に設けられ周面にブラシが植設されたドラムと、このドラムをその中心軸の回りに回転させるモータと、船上に設置され前記ハウジングを海底で移動可能に支持する支持部材と、この支持部材を介して前記ハウジングを海底で移動させる駆動部材と、船上に設置された吸引ポンプと、前記ハウジングと前記吸引ポンプとの間に連結された吸引ホースと、を有することを特徴とする海底生物採取機。
【請求項2】
前記支持部材は、船上に固定された支持部と、この支持部に対して回転する旋回部と、この旋回部に取り付けられ前記旋回部に対して上下に揺動する基端側アームと、この基端側アームに縦続で連結され各連結部で相互に揺動可能の1又は複数個の移動アームと、を有することを特徴とする請求項1に記載の海底生物採取機。
【請求項3】
前記ハウジングは、前記移動アームにおける最も先端側の移動アームの先端にワイヤにより吊り下げられていることを特徴とする請求項2に記載の海底生物採取機。
【請求項4】
前記移動アームのうち少なくとも1個は、伸縮させることができることを特徴とする請求項2又は3に記載の海底生物採取機。
【請求項5】
前記ドラムは、1対がその回転中心を相互に平行にしその対向方向を前記ハウジングの底部に平行にして設置されており、前記駆動部材は、前記ドラムの回転中心軸に平行な方向に前記ハウジングを移動させることを特徴とする請求項1に記載の海底生物採取機。
【請求項6】
前記ハウジング内における前記ドラムよりも外方の位置には、前記ブラシにより掻き取られた海底生物を前記ハウジングにおける前記吸引ホースとの連結位置に向けて導く水流を生起させる噴射ノズルが設置されており、前記船上には噴射ポンプが設置され、前記噴射ポンプと前記噴射ノズルとは噴射ホースにより連結されていることを特徴とする請求項5に記載の海底生物採取機。
【請求項7】
前記ハウジングにおける移動方向の側方の側壁には、この側壁から延出するように弾性板が前記側壁に平行に取り付けられていることを特徴とする請求項1乃至6のいずれか1項に記載の海底生物採取機。
【請求項8】
前記吸引ホース及び前記噴射ホースは、可撓性を有することを特徴とする請求項1乃至7のいずれか1項に記載の海底生物採取機。
【請求項1】
底部が開口したハウジングと、このハウジング内に設けられ周面にブラシが植設されたドラムと、このドラムをその中心軸の回りに回転させるモータと、船上に設置され前記ハウジングを海底で移動可能に支持する支持部材と、この支持部材を介して前記ハウジングを海底で移動させる駆動部材と、船上に設置された吸引ポンプと、前記ハウジングと前記吸引ポンプとの間に連結された吸引ホースと、を有することを特徴とする海底生物採取機。
【請求項2】
前記支持部材は、船上に固定された支持部と、この支持部に対して回転する旋回部と、この旋回部に取り付けられ前記旋回部に対して上下に揺動する基端側アームと、この基端側アームに縦続で連結され各連結部で相互に揺動可能の1又は複数個の移動アームと、を有することを特徴とする請求項1に記載の海底生物採取機。
【請求項3】
前記ハウジングは、前記移動アームにおける最も先端側の移動アームの先端にワイヤにより吊り下げられていることを特徴とする請求項2に記載の海底生物採取機。
【請求項4】
前記移動アームのうち少なくとも1個は、伸縮させることができることを特徴とする請求項2又は3に記載の海底生物採取機。
【請求項5】
前記ドラムは、1対がその回転中心を相互に平行にしその対向方向を前記ハウジングの底部に平行にして設置されており、前記駆動部材は、前記ドラムの回転中心軸に平行な方向に前記ハウジングを移動させることを特徴とする請求項1に記載の海底生物採取機。
【請求項6】
前記ハウジング内における前記ドラムよりも外方の位置には、前記ブラシにより掻き取られた海底生物を前記ハウジングにおける前記吸引ホースとの連結位置に向けて導く水流を生起させる噴射ノズルが設置されており、前記船上には噴射ポンプが設置され、前記噴射ポンプと前記噴射ノズルとは噴射ホースにより連結されていることを特徴とする請求項5に記載の海底生物採取機。
【請求項7】
前記ハウジングにおける移動方向の側方の側壁には、この側壁から延出するように弾性板が前記側壁に平行に取り付けられていることを特徴とする請求項1乃至6のいずれか1項に記載の海底生物採取機。
【請求項8】
前記吸引ホース及び前記噴射ホースは、可撓性を有することを特徴とする請求項1乃至7のいずれか1項に記載の海底生物採取機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−261341(P2009−261341A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−116459(P2008−116459)
【出願日】平成20年4月25日(2008.4.25)
【出願人】(596059934)運上船舶工業有限会社 (5)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月25日(2008.4.25)
【出願人】(596059934)運上船舶工業有限会社 (5)
【Fターム(参考)】
[ Back to top ]