
海洋レーダ装置
【課題】海洋レーダでは、海洋流速分布を算出する際、複数サイトにて算出される視線方向流速を合成する。しかし、この方法では、各レーダサイトからの視線方向の交差角が90度より大きく離れる観測エリアにおいては、観測精度が劣化する。そのため、それぞれのレーダサイトの観測覆域の一部しか流速ベクトルの解析に利用できないこと、及び、観測対象覆域に適合する複数レーダサイト設置位置の選定が困難などの問題があった。
【解決手段】レーダ画像から、観測周期及び実際上あり得る最大海流速度より算出されるメッシュエリア毎に、エコー強度分布より波紋パターンを抽出し、その移動量より上記エリアについての流速を算出する。1レーダサイトの情報のみでレーダの覆域と同じ領域において、均一な精度で海流速度を算出可能にする。
【解決手段】レーダ画像から、観測周期及び実際上あり得る最大海流速度より算出されるメッシュエリア毎に、エコー強度分布より波紋パターンを抽出し、その移動量より上記エリアについての流速を算出する。1レーダサイトの情報のみでレーダの覆域と同じ領域において、均一な精度で海流速度を算出可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、海洋の流速分布を観測する海洋レーダ装置に関するものである。
【背景技術】
【0002】
海洋レーダ装置は、電波を海面に照射し、海面で散乱された信号を受信して、周波数解析を行うことによって海の流れや波高などを観測する装置である。このような海洋レーダ装置として、レーダ画像の反射強度(陰影情報)より現時刻の波浪の3次元フーリエスペクトルを求め、この波浪スペクトルの位相を修正することにより、所定時間後の波浪情報を予測する方法が知られている。この場合の波浪情報は個別波予測波面の波高高さを算出するものである。(特許文献1参照)
【0003】
また海面にFMCW(Frequency Modulated Continuous Wave)方式またはFWICW(Frequency ModulatedInterrupted Continuous Wave)方式によりレーダビームを照射し、その反射波より算出されるドップラースペクトルから、ブラッグ散乱機構に基づきレーダサイトからの視線方向の海流速度を推定するものも知られている。そして、海流速度の2次元情報を得るために、アンテナ方位の異なる複数のレーダサイトを動作させ、視線方向の流速分布を算出し、複数のレーダサイトの視線方向流速をベクトル合成して、2次元の流速を測定していた(特許文献2参照)。
【特許文献1】特開2004−338580号公報
【特許文献2】特開2000−314773号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記海洋レーダ装置の特許文献1に示されるものは、船舶レーダを対象としたもので、レーダの設置位置が低いため、明瞭に波の頂上が観測できない状態を想定している。また目的は波高の算出であり、PPI(Plan Position Indicator)画像のスペクトル解析の結果から推定した波数より、視線方向の流速は推定できるかもしれないが、2次元的な流速ベクトルの算出は困難である。
また、特許文献2に示される海洋レーダ装置は、広域な覆域での海洋流速分布を対象としたもので、沿岸付近の海流速度が正確に算出されないという問題があった。一方で近年、原子力発電所の温排水や沿岸道路の冠水対策調査など沿岸付近の海流速度分布に興味が高まっている。また上記方法は、各レーダサイトからの視線方向の交差角が90度より大きく離れる観測エリアにおいては、観測精度が劣化する。そのため、それぞれのレーダサイトの観測覆域の一部しか流速ベクトルの解析に利用できないこと、及び、観測対象覆域に適合する複数レーダサイト設置位置の選定が困難などの問題があった。
【0005】
この発明は、上記の問題を解決するために、1サイトのレーダサイトから得られるレーダ画像の情報をもとに、2次元的な海流速度ベクトルの分布を推定することが出来る海洋レーダ装置を得ることを目的とするものである。
【課題を解決するための手段】
【0006】
この発明による海洋レーダ装置は、海面に電波を放射して得られる反射波をビデオ信号として処理する信号処理部、この信号処理部からのビデオ信号より高分解レーダ画像を生成する表示処理部、この表示処理部で生成された高分解能レーダ画像をもとに、流速分布の算出を行う流速算出部、および流速算出部で算出された流速分布を前記高分解レーダ画像に重畳表示する表示部を備えたことを特徴とする。
【発明の効果】
【0007】
この発明の海洋レーダ装置は、レーダ画像から抽出した波紋パターンより各メッシュにおける2次元の流速ベクトルを算出することにより、1レーダサイトの情報のみでレーダの覆域内にて均一な精度で海流速度の分布を算出可能にする。
【0008】
さらに、ドップラー速度より算出されるアンテナ視線方向の流速速度を補助的に用いることにより、算出精度を高めることが出来るものである。
【発明を実施するための最良の形態】
【0009】
実施の形態1
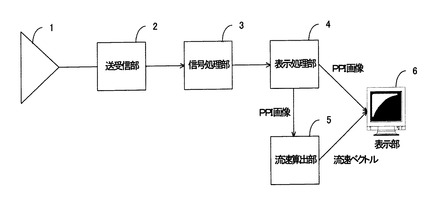
以下、この発明の実施の形態を図に基づいて説明する。図1は、この発明による実施の形態1の海洋レーダ装置を示すブロック構成図である。図1において、アンテナ部1は海洋面に例えば短波帯の電波(3〜30MHz)を放射し、海面で散乱した反射波を受けるもので、観測したい海洋面付近の地上または船舶に設けられる。送受信部2はアンテナ部1から放射する電波の送信信号を送出し、またアンテナ部1で受けた海洋面からの反射波の受信信号を検波および増幅するものである。信号処理部3は、送受信部2からの受信信号を変換処理してモニターなどの表示部で見れるようビデオ信号とする。ここで用いられるアンテナ部1、送受信部2および信号処理部3は従来から使用されている技術で構成されるもので、特に目新しいものではない。表示処理部4は、信号処理部3からのビデオ信号をノイズフイルタなどに通して、距離および方位に対して高分解能のレーダ画像(PPI=Plan Position Indicator画像)を生成するものである。流速算出部5は信号処理部4からの高分解能レーダ画像をもとに、海洋面の流速分布の算出を行うものである。表示部6は、流速算出部5で算出された流速分布と表示処理部4で生成された高分解能レーザ画像を重畳表示するモニターである。
【0010】
図1に示す海洋レーダ装置の動作としては、まず送受信部2から送出された送信信号の電波はアンテナ部1から海洋面に向けて放射される。海洋面からの散乱波である反射波のエコーはアンテナ部1を介して受信され、送受信部2に入力される。信号処理部3では、送受信部2からの受信信号を処理し、モニターの表示部6に表示できるようビデオ信号に変換する。表示処理部4は信号処理部3で得られたビデオ信号情報をもとに、波紋(海洋表面波)データの抽出が容易になるよう観測覆域についての高分解能のレーダ画像を生成する。流速算出部5は表示処理部4からの高分解能レーザ画像をもとに、後述する図2の詳細構成図で説明するように、レーザ画像の濃淡データをデジタル化して波紋データを抽出し、この波紋データから各メッシュにおける2次元の海洋流速分布の算出を行う。表示部6は流速算出部5で算出された流速分布と表示処理部4で生成された高分解能のレーダ画像を重畳表示し、海洋流速の分布を得る。
【0011】
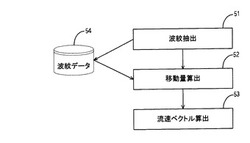
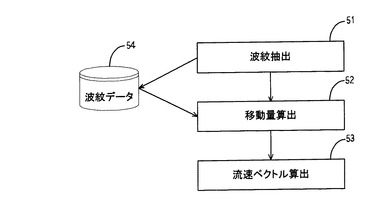
図2は図1に示す流速算出部5の詳細構成図で、表示処理部4からのレーダ画像から波紋データを抽出する波紋抽出手段51、この波紋抽出手段51で前回抽出された波紋データと今回抽出された波紋データを合成し、移動ベクトル△dを算出する移動量算出手段52、この移動量算出手段52で算出された移動ベクトル△dと観測時間間隔△t(観測周期)から流速ベクトルを算出する流速ベクトル算出手段53、および波紋抽出手段51で抽出した波紋データを一時的に記憶する波紋データ記憶装置54より構成される。上記の観測時間間隔△tは、パルスレーダ方式の場合はパルス繰り返し周期で、FMICW方式の場合は掃引時間間隔となる。
【0012】
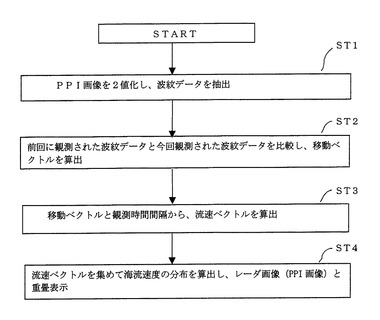
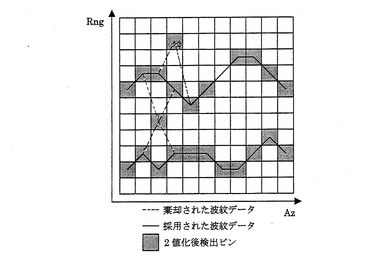
図2における動作を図3に示すフローチャートに基づいて説明する。まずステップST1において、表示処理部4より受け取った高分解能のレーダ画像(PPI画像)を波紋抽出手段51により2値化し、波紋の特徴画像である波紋データを抽出する。図4は、この波紋データ抽出の概念を示すもので、横軸は方位を示すアジマス角Azを、縦軸は距離を示すレンジRngを表しており、波紋データの抽出はこのRng−Az座標で行う。この図4において、マス目の網目箇所は2値化後の検出ビンを示しており、隣接ビンとの距離、及び振幅強度を評価値とし、波紋データを抽出する。図4の破線は評価された結果、棄却された波紋データで、実線が採用された波紋データを表している。波紋データ抽出の各処理単位は、XY座標での最大流速速度×観測時間間隔の幅より大きい範囲とし、処理後、Rng−Az座標よりXY座標へ変換する。
【0013】
このように波紋データの抽出は、レーダ座標であるRng−Az座標で行うことにより、レーダが検出したデータを無駄なく利用できる。しかし、波紋データからその移動量を算出する場合は、Rng−Az座標よりXY座標へ座標変換を行って、XY座標を用いて行うほうが算出しやすく、また誤差も少ない。
【0014】
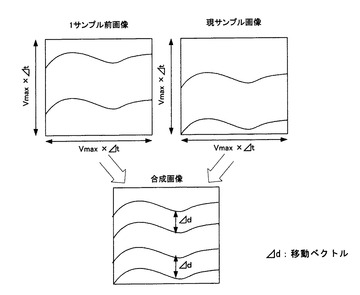
このステップST1で抽出された波紋データは波紋データ記憶装置54に記憶される。次にステップST2では、移動量算出手段52において、図5に示すように1辺が最大流速速度Vmax×観測時間間隔△tの四角形にメッシュ化された画像毎に、波紋データ記憶装置54に記憶されている前回観測された波紋データ(1サンプル前画像=現サンプルから△t前画像)と今回観測された波紋データ(現サンプル画像)が比較合成され、1メッシュあたりの波紋データの1観測あたりの移動ベクトル△d(移動量および移動方向)の算出を行う。図5では合成画像は、1サンプル前から現サンプルへ下向きに移動し、その移動量は△dとなっている。
【0015】
次にステップST3では、流速ベクトル算出手段53において、移動ベクトル△dと観測時間間隔△tより、移動ベクトル△d÷観測時間間隔△t=流速ベクトルの計算を行って、移動量を速度に換算し、メッシュ毎に流速ベクトルを算出する。この流速ベクトルはステップ2で求めた移動ベクトル△dの単位時間あたりの移動量を表しており、2次元の流速を示している。ステップST4では、流速ベクトル算出手段53によって算出されたメッシュ毎の流速ベクトルデータは、すべてのメッシュにおける流速ベクトルが集められて海流速度の分布となり、これが表示部6にて、表示処理部4で処理された高分解能のレーダ画像と重畳表示される。このように、メッシュ単位で算出された流速ベクトルを集めることにより、観測範囲の海流速度ベクトルの分布が求められる。
【0016】
以上のように、レーダ画像から観測周期及び最大流速より算出されるメッシュエリア毎に、反射波の強度分布より波紋データを抽出し、その波紋データの移動量より上記エリアについての流速を算出することにより、1レーダサイトの情報のみでレーダの覆域と同じ領域において、レーダの覆域内において均一な精度で海流速度が算出可能になる。
【0017】
なお以上の説明では、レーザ座標の波紋データをXY座標に変換し、図5に示すような1辺が最大流速速度Vmax×観測時間間隔△tの四角形のメッシュを用い、そのメッシュの範囲内の移動ベクトル△dを算出したが、座標変換せずにレーザ座標のデータから直接移動ベクトル△dを算出することも可能である。
レーザ座標のデータをそのまま用いて移動ベクトル△dを算出する場合は、最大流速速度Vmax×観測時間間隔△tのメッシュは四角形ではなく、円形のレーダ画面の座標を所定角度で切り取った扇形のメッシュとなる。この場合、距離が遠くなるほど移動ベクトル△dの算出誤差は少し大きくなる。
【0018】
実施の形態2
図1に示す実施の形態1では、レーダ画像のみをもとに海流速度分布の算出を行ったが、実施の形態2は信号処理部3がドップラー速度を算出可能なものとし、ブラッグ散乱機構より算出されるアンテナ視線方向の流速を流速算出部5に適用することで、海流速度の算出精度を高めるようにしたものである。
【0019】
一般に海洋レーダでは、観測域内の海洋上に存在する物体の速度も検出される。その物体とは例えば船舶、洋上ブイ、陸地(島)などである。このような海上物の速度のスペクトラムが海流速度のスペクトラムと十分離れておれば、別の速度をもった物体であるという認識が容易にできるが、物体と海流速度のスペクトラムが重なったり、近接したりすると、両者の識別が困難となる。この発明の実施の形態2は、このような場合でも海流速度を精度よく測定できるようにしたものである。
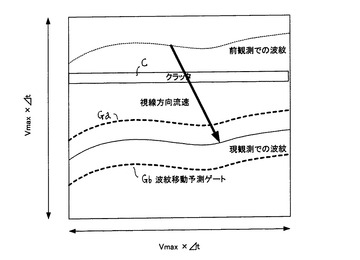
図6に示すように、レーダ画像に船などの海上の浮遊物によりクラッタCが大きく検出されている場合は、流速ベクトルを算出するのに必要な前観測での波紋データと現観測での波紋データの比較対象を誤る可能性がある。その場合、上記のアンテナ視線方向の海洋流速をもとに、波紋の移動先を中心とした波紋移動予測ゲートGa〜Gb内においてのみ、比較対象の波紋データを検出することにより、海流速度の算出精度を高めることが出来る。
【産業上の利用可能性】
【0020】
この発明の海洋レーダ装置は、特に沿岸付近の海流速度の分布を測定するのに適しているが、これに限定されず、広域な覆域での海洋流速分布を測定することも可能で、またレーダ受信強度は波高に応じて増加するため、この発明を津波警報装置にも容易に拡張可能である。
【図面の簡単な説明】
【0021】
【図1】この発明の実施の形態1に係る海洋レーダ装置の構成図である。
【図2】この発明の実施の形態1に係る海洋レーダ装置の流速算出部の詳細構成図である。
【図3】この発明の実施の形態1に係る海洋レーダ装置の動作のフローチャートを示す図である。
【図4】この発明の実施の形態1に係る海洋レーダ装置の波紋抽出手段の概念を表す図である。
【図5】この発明の実施の形態1に係る海洋レーダ装置の移動量算出手段の概念を表す図である。
【図6】この発明の実施の形態2に係る海洋レーダ装置の移動量算出手段の概念を表す図である。
【符号の説明】
【0022】
1:アンテナ部、 2:送受信部、
3:信号処理部、 4:表示処理部、
5:流速算出部、 6:表示部、
51:波紋抽出手段、 52:移動量算出手段、
53:流速ベクトル算出手段、 54:波紋データ記憶装置
【技術分野】
【0001】
この発明は、海洋の流速分布を観測する海洋レーダ装置に関するものである。
【背景技術】
【0002】
海洋レーダ装置は、電波を海面に照射し、海面で散乱された信号を受信して、周波数解析を行うことによって海の流れや波高などを観測する装置である。このような海洋レーダ装置として、レーダ画像の反射強度(陰影情報)より現時刻の波浪の3次元フーリエスペクトルを求め、この波浪スペクトルの位相を修正することにより、所定時間後の波浪情報を予測する方法が知られている。この場合の波浪情報は個別波予測波面の波高高さを算出するものである。(特許文献1参照)
【0003】
また海面にFMCW(Frequency Modulated Continuous Wave)方式またはFWICW(Frequency ModulatedInterrupted Continuous Wave)方式によりレーダビームを照射し、その反射波より算出されるドップラースペクトルから、ブラッグ散乱機構に基づきレーダサイトからの視線方向の海流速度を推定するものも知られている。そして、海流速度の2次元情報を得るために、アンテナ方位の異なる複数のレーダサイトを動作させ、視線方向の流速分布を算出し、複数のレーダサイトの視線方向流速をベクトル合成して、2次元の流速を測定していた(特許文献2参照)。
【特許文献1】特開2004−338580号公報
【特許文献2】特開2000−314773号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記海洋レーダ装置の特許文献1に示されるものは、船舶レーダを対象としたもので、レーダの設置位置が低いため、明瞭に波の頂上が観測できない状態を想定している。また目的は波高の算出であり、PPI(Plan Position Indicator)画像のスペクトル解析の結果から推定した波数より、視線方向の流速は推定できるかもしれないが、2次元的な流速ベクトルの算出は困難である。
また、特許文献2に示される海洋レーダ装置は、広域な覆域での海洋流速分布を対象としたもので、沿岸付近の海流速度が正確に算出されないという問題があった。一方で近年、原子力発電所の温排水や沿岸道路の冠水対策調査など沿岸付近の海流速度分布に興味が高まっている。また上記方法は、各レーダサイトからの視線方向の交差角が90度より大きく離れる観測エリアにおいては、観測精度が劣化する。そのため、それぞれのレーダサイトの観測覆域の一部しか流速ベクトルの解析に利用できないこと、及び、観測対象覆域に適合する複数レーダサイト設置位置の選定が困難などの問題があった。
【0005】
この発明は、上記の問題を解決するために、1サイトのレーダサイトから得られるレーダ画像の情報をもとに、2次元的な海流速度ベクトルの分布を推定することが出来る海洋レーダ装置を得ることを目的とするものである。
【課題を解決するための手段】
【0006】
この発明による海洋レーダ装置は、海面に電波を放射して得られる反射波をビデオ信号として処理する信号処理部、この信号処理部からのビデオ信号より高分解レーダ画像を生成する表示処理部、この表示処理部で生成された高分解能レーダ画像をもとに、流速分布の算出を行う流速算出部、および流速算出部で算出された流速分布を前記高分解レーダ画像に重畳表示する表示部を備えたことを特徴とする。
【発明の効果】
【0007】
この発明の海洋レーダ装置は、レーダ画像から抽出した波紋パターンより各メッシュにおける2次元の流速ベクトルを算出することにより、1レーダサイトの情報のみでレーダの覆域内にて均一な精度で海流速度の分布を算出可能にする。
【0008】
さらに、ドップラー速度より算出されるアンテナ視線方向の流速速度を補助的に用いることにより、算出精度を高めることが出来るものである。
【発明を実施するための最良の形態】
【0009】
実施の形態1
以下、この発明の実施の形態を図に基づいて説明する。図1は、この発明による実施の形態1の海洋レーダ装置を示すブロック構成図である。図1において、アンテナ部1は海洋面に例えば短波帯の電波(3〜30MHz)を放射し、海面で散乱した反射波を受けるもので、観測したい海洋面付近の地上または船舶に設けられる。送受信部2はアンテナ部1から放射する電波の送信信号を送出し、またアンテナ部1で受けた海洋面からの反射波の受信信号を検波および増幅するものである。信号処理部3は、送受信部2からの受信信号を変換処理してモニターなどの表示部で見れるようビデオ信号とする。ここで用いられるアンテナ部1、送受信部2および信号処理部3は従来から使用されている技術で構成されるもので、特に目新しいものではない。表示処理部4は、信号処理部3からのビデオ信号をノイズフイルタなどに通して、距離および方位に対して高分解能のレーダ画像(PPI=Plan Position Indicator画像)を生成するものである。流速算出部5は信号処理部4からの高分解能レーダ画像をもとに、海洋面の流速分布の算出を行うものである。表示部6は、流速算出部5で算出された流速分布と表示処理部4で生成された高分解能レーザ画像を重畳表示するモニターである。
【0010】
図1に示す海洋レーダ装置の動作としては、まず送受信部2から送出された送信信号の電波はアンテナ部1から海洋面に向けて放射される。海洋面からの散乱波である反射波のエコーはアンテナ部1を介して受信され、送受信部2に入力される。信号処理部3では、送受信部2からの受信信号を処理し、モニターの表示部6に表示できるようビデオ信号に変換する。表示処理部4は信号処理部3で得られたビデオ信号情報をもとに、波紋(海洋表面波)データの抽出が容易になるよう観測覆域についての高分解能のレーダ画像を生成する。流速算出部5は表示処理部4からの高分解能レーザ画像をもとに、後述する図2の詳細構成図で説明するように、レーザ画像の濃淡データをデジタル化して波紋データを抽出し、この波紋データから各メッシュにおける2次元の海洋流速分布の算出を行う。表示部6は流速算出部5で算出された流速分布と表示処理部4で生成された高分解能のレーダ画像を重畳表示し、海洋流速の分布を得る。
【0011】
図2は図1に示す流速算出部5の詳細構成図で、表示処理部4からのレーダ画像から波紋データを抽出する波紋抽出手段51、この波紋抽出手段51で前回抽出された波紋データと今回抽出された波紋データを合成し、移動ベクトル△dを算出する移動量算出手段52、この移動量算出手段52で算出された移動ベクトル△dと観測時間間隔△t(観測周期)から流速ベクトルを算出する流速ベクトル算出手段53、および波紋抽出手段51で抽出した波紋データを一時的に記憶する波紋データ記憶装置54より構成される。上記の観測時間間隔△tは、パルスレーダ方式の場合はパルス繰り返し周期で、FMICW方式の場合は掃引時間間隔となる。
【0012】
図2における動作を図3に示すフローチャートに基づいて説明する。まずステップST1において、表示処理部4より受け取った高分解能のレーダ画像(PPI画像)を波紋抽出手段51により2値化し、波紋の特徴画像である波紋データを抽出する。図4は、この波紋データ抽出の概念を示すもので、横軸は方位を示すアジマス角Azを、縦軸は距離を示すレンジRngを表しており、波紋データの抽出はこのRng−Az座標で行う。この図4において、マス目の網目箇所は2値化後の検出ビンを示しており、隣接ビンとの距離、及び振幅強度を評価値とし、波紋データを抽出する。図4の破線は評価された結果、棄却された波紋データで、実線が採用された波紋データを表している。波紋データ抽出の各処理単位は、XY座標での最大流速速度×観測時間間隔の幅より大きい範囲とし、処理後、Rng−Az座標よりXY座標へ変換する。
【0013】
このように波紋データの抽出は、レーダ座標であるRng−Az座標で行うことにより、レーダが検出したデータを無駄なく利用できる。しかし、波紋データからその移動量を算出する場合は、Rng−Az座標よりXY座標へ座標変換を行って、XY座標を用いて行うほうが算出しやすく、また誤差も少ない。
【0014】
このステップST1で抽出された波紋データは波紋データ記憶装置54に記憶される。次にステップST2では、移動量算出手段52において、図5に示すように1辺が最大流速速度Vmax×観測時間間隔△tの四角形にメッシュ化された画像毎に、波紋データ記憶装置54に記憶されている前回観測された波紋データ(1サンプル前画像=現サンプルから△t前画像)と今回観測された波紋データ(現サンプル画像)が比較合成され、1メッシュあたりの波紋データの1観測あたりの移動ベクトル△d(移動量および移動方向)の算出を行う。図5では合成画像は、1サンプル前から現サンプルへ下向きに移動し、その移動量は△dとなっている。
【0015】
次にステップST3では、流速ベクトル算出手段53において、移動ベクトル△dと観測時間間隔△tより、移動ベクトル△d÷観測時間間隔△t=流速ベクトルの計算を行って、移動量を速度に換算し、メッシュ毎に流速ベクトルを算出する。この流速ベクトルはステップ2で求めた移動ベクトル△dの単位時間あたりの移動量を表しており、2次元の流速を示している。ステップST4では、流速ベクトル算出手段53によって算出されたメッシュ毎の流速ベクトルデータは、すべてのメッシュにおける流速ベクトルが集められて海流速度の分布となり、これが表示部6にて、表示処理部4で処理された高分解能のレーダ画像と重畳表示される。このように、メッシュ単位で算出された流速ベクトルを集めることにより、観測範囲の海流速度ベクトルの分布が求められる。
【0016】
以上のように、レーダ画像から観測周期及び最大流速より算出されるメッシュエリア毎に、反射波の強度分布より波紋データを抽出し、その波紋データの移動量より上記エリアについての流速を算出することにより、1レーダサイトの情報のみでレーダの覆域と同じ領域において、レーダの覆域内において均一な精度で海流速度が算出可能になる。
【0017】
なお以上の説明では、レーザ座標の波紋データをXY座標に変換し、図5に示すような1辺が最大流速速度Vmax×観測時間間隔△tの四角形のメッシュを用い、そのメッシュの範囲内の移動ベクトル△dを算出したが、座標変換せずにレーザ座標のデータから直接移動ベクトル△dを算出することも可能である。
レーザ座標のデータをそのまま用いて移動ベクトル△dを算出する場合は、最大流速速度Vmax×観測時間間隔△tのメッシュは四角形ではなく、円形のレーダ画面の座標を所定角度で切り取った扇形のメッシュとなる。この場合、距離が遠くなるほど移動ベクトル△dの算出誤差は少し大きくなる。
【0018】
実施の形態2
図1に示す実施の形態1では、レーダ画像のみをもとに海流速度分布の算出を行ったが、実施の形態2は信号処理部3がドップラー速度を算出可能なものとし、ブラッグ散乱機構より算出されるアンテナ視線方向の流速を流速算出部5に適用することで、海流速度の算出精度を高めるようにしたものである。
【0019】
一般に海洋レーダでは、観測域内の海洋上に存在する物体の速度も検出される。その物体とは例えば船舶、洋上ブイ、陸地(島)などである。このような海上物の速度のスペクトラムが海流速度のスペクトラムと十分離れておれば、別の速度をもった物体であるという認識が容易にできるが、物体と海流速度のスペクトラムが重なったり、近接したりすると、両者の識別が困難となる。この発明の実施の形態2は、このような場合でも海流速度を精度よく測定できるようにしたものである。
図6に示すように、レーダ画像に船などの海上の浮遊物によりクラッタCが大きく検出されている場合は、流速ベクトルを算出するのに必要な前観測での波紋データと現観測での波紋データの比較対象を誤る可能性がある。その場合、上記のアンテナ視線方向の海洋流速をもとに、波紋の移動先を中心とした波紋移動予測ゲートGa〜Gb内においてのみ、比較対象の波紋データを検出することにより、海流速度の算出精度を高めることが出来る。
【産業上の利用可能性】
【0020】
この発明の海洋レーダ装置は、特に沿岸付近の海流速度の分布を測定するのに適しているが、これに限定されず、広域な覆域での海洋流速分布を測定することも可能で、またレーダ受信強度は波高に応じて増加するため、この発明を津波警報装置にも容易に拡張可能である。
【図面の簡単な説明】
【0021】
【図1】この発明の実施の形態1に係る海洋レーダ装置の構成図である。
【図2】この発明の実施の形態1に係る海洋レーダ装置の流速算出部の詳細構成図である。
【図3】この発明の実施の形態1に係る海洋レーダ装置の動作のフローチャートを示す図である。
【図4】この発明の実施の形態1に係る海洋レーダ装置の波紋抽出手段の概念を表す図である。
【図5】この発明の実施の形態1に係る海洋レーダ装置の移動量算出手段の概念を表す図である。
【図6】この発明の実施の形態2に係る海洋レーダ装置の移動量算出手段の概念を表す図である。
【符号の説明】
【0022】
1:アンテナ部、 2:送受信部、
3:信号処理部、 4:表示処理部、
5:流速算出部、 6:表示部、
51:波紋抽出手段、 52:移動量算出手段、
53:流速ベクトル算出手段、 54:波紋データ記憶装置
【特許請求の範囲】
【請求項1】
海面に電波を放射して得られる反射波をビデオ信号として処理する信号処理部、この信号処理部からのビデオ信号より高分解レーダ画像を生成する表示処理部、この表示処理部で生成された高分解能レーダ画像をもとに、流速分布の算出を行う流速算出部、および流速算出部で算出された流速分布を前記高分解レーダ画像に重畳表示する表示部を備えたことを特徴とする海洋レーダ装置。
【請求項2】
流速算出部は、観測周期及び最大海流速度より算出されるメッシュエリア毎に、反射波の強度分布より波紋データを抽出し、その波紋データの移動量より上記エリアについての流速を算出することを特徴とする請求項1に記載の海洋レーダ装置。
【請求項3】
流速算出部は、レーダ画像を2値化し波紋データを抽出する波紋抽出手段と、前回観測された波紋データと今回観測された波紋データを比較し、移動ベクトルを算出する移動量算出手段と、前記移動ベクトルと観測時間間隔から流速ベクトルを算出する流速ベクトル算出手段とからなる請求項1または請求項2に記載の海洋レーダ装置。
【請求項4】
信号処理部は視線方向のドップラー計測を行う手段を有し、この信号処理部で得られたドップラー速度をもとにブラッグ散乱機構より算出される視線方向の海流速度を用いて、流速分布の算出精度を高めたことを特徴とする請求項1乃至請求項3のいずれか1つに記載の海洋レーダ装置。
【請求項1】
海面に電波を放射して得られる反射波をビデオ信号として処理する信号処理部、この信号処理部からのビデオ信号より高分解レーダ画像を生成する表示処理部、この表示処理部で生成された高分解能レーダ画像をもとに、流速分布の算出を行う流速算出部、および流速算出部で算出された流速分布を前記高分解レーダ画像に重畳表示する表示部を備えたことを特徴とする海洋レーダ装置。
【請求項2】
流速算出部は、観測周期及び最大海流速度より算出されるメッシュエリア毎に、反射波の強度分布より波紋データを抽出し、その波紋データの移動量より上記エリアについての流速を算出することを特徴とする請求項1に記載の海洋レーダ装置。
【請求項3】
流速算出部は、レーダ画像を2値化し波紋データを抽出する波紋抽出手段と、前回観測された波紋データと今回観測された波紋データを比較し、移動ベクトルを算出する移動量算出手段と、前記移動ベクトルと観測時間間隔から流速ベクトルを算出する流速ベクトル算出手段とからなる請求項1または請求項2に記載の海洋レーダ装置。
【請求項4】
信号処理部は視線方向のドップラー計測を行う手段を有し、この信号処理部で得られたドップラー速度をもとにブラッグ散乱機構より算出される視線方向の海流速度を用いて、流速分布の算出精度を高めたことを特徴とする請求項1乃至請求項3のいずれか1つに記載の海洋レーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−248293(P2007−248293A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−72789(P2006−72789)
【出願日】平成18年3月16日(2006.3.16)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月16日(2006.3.16)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]